МИНИСТРЕСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ
ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего образования
Казанский Национальный Исследовательский Технический Университет
КНИТУ-КАИ им. А. Н. Туполева
(КНИТУ-КАИ)
Институт автоматики и электронного приборостроения
Кафедра автоматики и управления
27.03.04 Управление в технических системах
КУРСОВАЯ РАБОТА
по дисциплине: Системы автоматического управления роботами, ГПС и
мобильными роботами
на тему: Система управления двухзвенным роботом манипулятором
Обучающийся
гр. 3439
(номер группы)
Руководитель
Лазарева П.А.
(Ф.И.О.)
Нгуен Ф-М.Л.
(подпись, дата)
(Ф.И.О.)
___________
(оценка)
___________________
(подпись, дата)
Казань, 2022
Введение ........................................................................................................ 3
Глава 1. Постановка задачи .......................................................................... 5
1.1. Обзорная часть ................................................................................. 5
1.2. Математическая модель двухзвенного робота-манипулятора .... 7
1.3. Постановка задачи управления роботом-манипулятором ......... 10
1.4. Динамика плоского двухзвенного робота манипулятора .......... 11
Глава 2. Синтез законов управления для двухзвенного
робота-манипулятора ................................................................... 13
2.2. Синтез PD-регулятора ................................................................... 16
2.3. Метод линеаризации обратной связью ........................................ 18
Глава 3. Практическая реализация разработанных алгоритмов
управления и результаты моделирования .................................. 25
Выводы ......................................................................................................... 34
Список литературы .................................................................................... 35
Приложение ................................................................................................ 36
Введение
В настоящее время интенсивно пересматриваются все аспекты в производстве
в системе управления. Человечество с каждым годом старается привести
простые процессы к автоматизации, тем самым упрощая однотипную работу.
Появляется такой термин как САУ-совокупность взаимодействующих
устройств управления и управляемого объекта, обеспечивающая достижение
целей управления без вмешательств человека в соответствии с заданным
алгоритмом.
В этой связи широкое распространение получили промышленные роботыманипуляторы, которые в совокупности с программируемым логическим
контроллером образуют РТК разного назначения. Применение РТК в
производстве позволяет рационально подходить к использованию трудовых
ресурсов, повысить качество, снизить временные затраты, себестоимость за
счет снижения количества брака.
Использование роботов-манипуляторов позволяет выполнять одновременно
несколько задач быстро и точно, они обеспечивают беспрерывное
производство.
В нашей работе более подробно мы рассмотрим двухзвенный робот
манипулятор, который широко используется в промышленных производствах.
1. Постановка задачи
1.1 Обзорная часть
Общий вид уравнений динамики робота-манипулятора с n звеньями
и сочленениями вращательного типа описан в [3,4]. Уравнения динамики
двухзвенного робота-манипулятора, полученные с помощью уравнений
Лагранжа второго рода, используемые в данной работе, описаны в [2].
Методы построения наблюдателей для нелинейных динамических
SISO- и MIMO-систем через преобразование координат рассмотрены в
работах [5,6]. Пример построения наблюдателя для нелинейной системы
гибкого
однозвенного
робота
рассмотрен
в
работе
[7].
Критерии
управляемости и наблюдаемости нелинейных систем, основанные на алгебре
Ли векторных полей, рассмотрены в лекциях [5].
В современной теории управления при синтезе законов управления
нелинейными системами широко применяются работы таких авторов как JeanJacques E. Slotine, Eduardo F. Camacho и др., а для разработки законов
управления роботами-манипуляторами – работы M. W. Spong'а. Наиболее
известными и широко используемыми методами управления роботамиманипуляторами являются метод линеаризации обратной связью и PDрегулятор. Оба метода подробно рассмотрены в книгах [3,4].
Идея синтеза управления с прогнозом, теоретические сведения,
различные алгоритмы синтеза управления, а также примеры приложения
методов к задачам описаны в работах [8,9]. Нельзя не отметить методы
понижения размерности оптимизационной задачи, рассмотренные в [9].
Вопросы устойчивости и оптимизации играют важную роль в теории
управления. При доказательстве устойчивости использовался теоретический
материал, изложенный в книгах [10,11]. Так же в лекциях [10] рассмотрены
вопросы оптимальности управления.
1.2. Математическая модель двухзвенного
робота-манипулятора
Для
описания
динамики
двухзвенного
робота-манипулятора
воспользуемся математической моделью из книги [2].
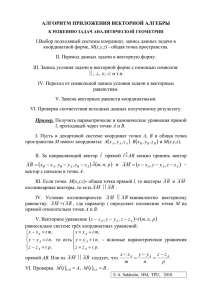
Рис. 1: Двухзвенный робот-манипулятор.
На рис. 1 представлена общая схема данного объекта. При этом
приняты следующие обозначения: 𝑚1 – масса первого звена, 𝑚2 – масса
второго звена, 𝐿1 – длина первого звена, 𝐿2 – длина второго звена, 𝐿𝑐1 –
расстояние до центра масс первого звена, 𝐿𝑐2 – расстояние до центра масс
второго звена, 𝐼1 – момент инерции первого звена относительно его центра
масс, 𝐼2 – момент инерции второго звена относительно его центра масс, 𝑔 –
ускорение силы тяжести, 𝑞1 – угол между первым звеном и горизонтальной
плоскостью, 𝑞2 – угол между вторым звеном и продолжением первого звена,
𝜏1 – крутящий момент первого двигателя, 𝜏2 – крутящий момент второго
двигателя.
Для удобства введем дополнительно пять переменных для упрощения
записи уравнений динамики робота-манипулятора
θ1 = 𝑚1 𝐿2𝑐1 + 𝑚2 𝐿21 + 𝐼1 ; θ2 = 𝑚2 𝐿2𝑐2 + 𝐼2 ;θ3 = 𝑚2 𝐿1 𝐿𝑐2 ;
θ4 = 𝑚1 𝐿𝑐1 + 𝑚2 𝐿1 ;θ5 = 𝑚2 𝐿𝑐2 .
В стандартной форме, используемой во многих источниках,
уравнение динамики робота-манипулятора имеет вид
𝐻(𝑞)𝑞̈ + 𝐶(𝑞, 𝑞̇ )𝑞̇ + 𝑔(𝑞) = 𝜏,
(1.1)
где 𝐻(𝑞) – матрица инерции, 𝐶(𝑞, 𝑞̇ )𝑞̇ – вектор центробежных и кориолисовых
сил, 𝑔(𝑞) – вектор гравитационных сил, 𝜏 – вектор моментов двигателей.
Выше перечисленные величины имеют следующий вид
𝑞1
θ + θ2 + 2 θ3 cos 𝑞2
𝑞 = [𝑞 ]; 𝐻(𝑞) = [ 1
θ2 + θ3 cos 𝑞2
2
𝐶(𝑞, 𝑞̇ ) = [
θ2 + θ3 cos 𝑞2
];
θ2
−θ3 sin(𝑞2 ) 𝑞̇ 2
−θ3 sin(𝑞2 )𝑞̇ 2 − θ3 sin(𝑞2 ) 𝑞̇ 1
];
θ5 𝑔 cos(𝑞1 + 𝑞2 )
0
𝜏1
θ 𝑔 cos 𝑞1 + θ5 𝑔 cos(𝑞1 + 𝑞2 )
𝑔(𝑞) = [ 4
]; 𝜏 = [𝜏 ].
θ5 𝑔 cos(𝑞1 + 𝑞2 )
2
Так как матрица 𝐻(𝑞) не вырожденная, то из уравнения (1.1) можем
найти явное выражение для 𝑞̈ :
𝑞̈ = 𝐻(𝑞)−1 [𝜏 − 𝐶(𝑞, 𝑞̇ )𝑞̇ − 𝑔(𝑞)].
Далее, с помощью замены переменных
𝑥 = (𝑥1 , 𝑥2 , 𝑥3 , 𝑥4 )𝑇 =
(𝑞1 , 𝑞1̇ , 𝑞2 , 𝑞2̇ )𝑇 перейдем от системы двух уравнений второго порядка к
системе из четырех уравнений первого порядка
𝑥2
𝑥1
𝑓1 (𝑥) + 𝑏11 (𝑥)𝜏1 + 𝑏12 (𝑥)𝜏2
𝑑 𝑥2
=
[
].
[
]
𝑥4
𝑑𝑡 𝑥3
𝑥4
𝑓2 (𝑥) + 𝑏21 (𝑥)𝜏1 + 𝑏22 (𝑥)𝜏2
(1.2)
𝑥2
𝑓 (𝑥)
𝑏 (𝑥) 𝑏12 (𝑥)
Здесь [ 1 ] = 𝐻(𝑥)−1 [−𝐶(𝑥) [𝑥 ] − 𝑔(𝑥)], [ 11
] = 𝐻(𝑥)−1 .
𝑓2 (𝑥)
(𝑥)
(𝑥)
𝑏21
𝑏22
4
Система имеет два измеряемых параметра вектора состояния –
обобщенные углы:
𝑦1 = 𝑥1 = 𝑞1 , 𝑦2 = 𝑥3 = 𝑞2 .
(1.3)
1.3 Динамика двухзвенного плоского локтевого рычага
Кинематика для двухзвенного плоского рычага RR. Для определения
динамики необходимо изучить рисунок 1, где мы предполагаем, что массы
звеньев сосредоточены на концах звеньях.
Совместная переменная:
𝐪 = |𝜃1 𝜃2 |𝑇
Обобщенный вектор силы:
𝛕 = |𝛕1 𝛕2 |𝑇
Рис. 1 Двухзвенный плоский рычаг RR
с крутящими моментами t1 и t2, подаваемыми приводами
а) Кинематическая и потенциальная энергия
Для звена 1 кинематическая и потенциальная энергия дуги:
1
𝐾1 = 𝑚1 𝑎12 𝜃12
2
𝑃1 = 𝑚1 𝑔𝑎1 𝑠𝑖𝑛𝜃1
Для звена 2 у нас есть:
𝑥2 = 𝑎1 𝑐𝑜𝑠𝜃1 + 𝑎2 cos(𝜃1 + 𝜃2 )
(5)
𝑦2 = 𝑎1 𝑠𝑖𝑛𝜃1 + 𝑎2 sin(𝜃1 + 𝜃2 )
(6)
𝑥2 = 𝑎1 𝑐𝑜𝑠𝜃1 + 𝑎2 cos(𝜃1 + 𝜃2 )
(7)
𝑦2 = 𝑎1 𝜃1 𝑐𝑜𝑠𝜃1 + 𝑎2 cos(𝜃1 + 𝜃2 ) cos(𝜃1 + 𝜃2 )
(8)
!!!поставить производные
так что квадрат скорости равен:
𝑣22 = 𝑥22 + 𝑦22 = 𝑎12 𝜃12 + 𝑎22 (𝜃1 + 𝜃2 )2 + 2𝑎1 𝑎2 (𝜃12 + 𝜃1 𝜃2 )𝑐𝑜𝑠𝜃2 (9)
Следовательно, кинематическая энергия для звена 2 равна:
1
𝐾2 = 𝑚2 𝑣22
2
1
1
= 𝑚2 𝑎12 𝜃12 + 𝑚2 𝑎12 (𝜃1 + 𝜃2 )2
2
2
+ 𝑚2 𝑎1 𝑎2 (𝜃12 + 𝜃1 𝜃2 )𝑐𝑜𝑠𝜃2
(10)
Потенциальная энергия для звена 2 равна:
𝑃2 = 𝑚2 𝑔𝑦2 = 𝑚2 𝑔[𝑎1 𝑠𝑖𝑛𝜃1 + 𝑎2 sin(𝜃1 + 𝜃2 )]
(11)
б) уравнение Лагранжа
Для всего плеча:
1
1
2
2
𝐿 = 𝐾 − 𝑃 = 𝐾1 + 𝐾2 − 𝑃1 − 𝑃2 = (𝑚1 + 𝑚2 )𝑎12 𝜃12 + 𝑚2 𝑎22 (𝜃1 + 𝜃2 )2 +
𝑚2 𝑎1 𝑎2 (𝜃12 + 𝜃1 𝜃2 )𝑐𝑜𝑠𝜃2 − (𝑚1 + 𝑚2 )𝑔𝑎1 𝑠𝑖𝑛𝜃1 − 𝑚2 𝑔𝑎2 sin (𝜃1 + 𝜃2 )
Условие необходимы для консервативных систем
(12)
Наконец, согласно уравнению Лагранжа, динамика рычага задается двумя
связанными нелинейными дифференциальными уравнениями
с) Динамика манипулятора
Динамика плеча в векторной форме описывается так:
𝑀(𝑞)
где
(𝑚1 + 𝑚2 )𝑎12 + 𝑚2 𝑎22 + 2𝑚2 𝑎1 𝑎2 𝑐𝑜𝑠𝜃2
𝑀(𝑞) = [
𝑚2 𝑎22 + 𝑚2 𝑎1 𝑎2 𝑐𝑜𝑠𝜃2
𝑚2 𝑎22 + 𝑚2 𝑎1 𝑎2 𝑐𝑜𝑠𝜃2
] (16)
𝑚2 𝑎22
Эта динамика манипулятора представлены в стандартной форме
𝑀(𝑞)𝑞 + 𝑉(𝑞, 𝑞) + 𝐺(𝑞) = 𝜏
(17)
где M(q)- матрица инерции, V(q,q)-вектор Кориолиса/центростремительный
вектор, G(q)-вектор силы тяжести.
Моделирование управления вычисленным крутящим моментом PD
Подробная механика моделирования контроллера вычисляемого крутящего
момента PD на цифровом компьютере
а) Закон управления вычислительным крутящим моментом
Выше мы обнаружили, что динамика двухзвенного плоского локтевого
рычага, показанная на рисунке 1, является
Они представлены в стандартной форме
𝑀(𝑞)𝑞 + 𝑉(𝑞, 𝑞) + 𝐺(𝑞) = 𝜏
(2)
Примем массу звеньев за 1 кг, а их длину за 1 м
Закон управления вычисленным крутящим моментом PD задается как
𝜏 = 𝑀(𝑞)(𝑞𝑑 + 𝐾𝑣 𝑒 + 𝐾𝑝 𝑒) + 𝑉(𝑞, 𝑞) + 𝐺(𝑞) (3)
С ошибкой отслеживания, определенной как
𝑒 = 𝑞𝑑 − 𝑞
(4)
б) Желаемая траектория
Пусть искомая траектория qd(t) имеет компоненты
2𝜋𝑡
𝜃1𝑑 = 𝑔1 sin (
𝜃2𝑑 = 𝑔2 sin (
с периодом T=2 и с амплитудой
2𝜋𝑡
𝑇
𝑇
)
)
(5)
g=0.1, рад 6 град. Для отслеживания
продуктов выберите постоянную времени системы с замкнутом контуром
равной 0.1 сек. Для критического демпфирования это означает, что Kv=diag
{kv}, Kp=diag{kp}, где
𝑤𝑛 =
1
= 10
0.1
𝑘𝑝 = 𝑤𝑛2 = 100, 𝑘𝑣 = 2𝑤𝑛 = 20
(6)
Важно понимать, что выбор параметров контроллера, таких как коэффициент
усиления PD, зависит от целей производительности-в данном случае от
периода желаемой траектории.
с) Компьютерное моделирование
Давайте смоделируем контроллер вычисляемого крутящего момента с
помощью
программы
в
TRESP
приложении
В.
Моделирование
с
использованием коммерческих пакетов, таких как MATLAB.
Синтез PD-регулятора
PD-регулятор
состоит
дифференциальной.
из
двух
Первая
составляющих:
составляющая
пропорциональной
вырабатывает
и
сигнал,
противодействующий отклонению регулируемой величины от заданного
значения, а вторая – сигнал, противодействующий отклонениям системы,
которые прогнозируются в будущем.
В этом параграфе вместо обозначения вектора состояния системы как
𝑥 = (𝑥1 , 𝑥2 , 𝑥3 , 𝑥4 )𝑇 = (𝑞1 , 𝑞̇ 1 , 𝑞2 , 𝑞̇ 2 )𝑇 удобней использовать два вектора
𝑞 = (𝑞1 , 𝑞2 ) и 𝑞̇ = (𝑞̇ 1 , 𝑞̇ 2 ). А систему представить в виде
𝐻(𝑞)𝑞̈ + 𝐶(𝑞, 𝑞̇ )𝑞̇ + 𝑔(𝑞) = 𝜏.
(2.9)
Синтезируем закон управления для системы (2.9), состоящий из PDрегулятора и компенсации силы тяжести
𝜏 = −𝐾𝑑 𝑞̇ − 𝐾𝑝 𝑞𝑒 + 𝑔(𝑞),
(2.10)
где 𝐾𝑑 , 𝐾𝑝 – постоянные положительно-определенные диагональные матрицы,
𝑞𝑒 = 𝑞 − 𝑞𝑑 – вектор ошибки, 𝑞𝑑 – желаемое состояние системы.
Для доказательство устойчивости системы (2.9) с законом управления (2.10) и
сходимости системы к желаемому положению введем квадратичную форму –
кандидата на функцию Ляпунова
1
1
𝑉 = 𝑞̇ 𝑇 𝐻(𝑞)𝑞̇ + 𝑞𝑒 𝐾𝑝 𝑞𝑒 .
2
2
Здесь первое слагаемое – это кинетическая энергия робота. Второе слагаемое
учитывает пропорциональную обратную связь 𝐾𝑝 𝑞𝑒 . Заметим, что значение
𝑉 – это полная кинетическая энергия системы, в которой вращательные
сочленения были заменены на пружины с жесткостью, представленной
матрицей 𝐾𝑝 , и положением равновесия в точке 𝑞𝑑 .
Вычислим полную производную функции 𝑉
𝑑𝑉
𝑑𝑡
1
= 𝑞̇ 𝑇 𝐻(𝑞)𝑞̈ + 𝑞̇ 𝑇 𝐻̇(𝑞)𝑞̇ + 𝑞̇ 𝑇 𝐾𝑝 𝑞𝑒 .
2
(2.11)
Теперь выразим 𝐻(𝑞)𝑞̈ из (2.9) и подставим в (2.11):
𝑑𝑉
1
= 𝑞̇ 𝑇 (𝜏 − 𝐶(𝑞, 𝑞̇ )𝑞̇ − 𝑔(𝑞)) + 𝑞̇ 𝑇 𝐻̇(𝑞)𝑞̇ + 𝑞̇ 𝑇 𝐾𝑝 𝑞𝑒
𝑑𝑡
2
1
= 𝑞̇ 𝑇 (𝜏 + 𝐾𝑝 𝑞𝑒 − 𝑔(𝑞)) + 𝑞̇ 𝑇 (𝐻̇(𝑞) − 2𝐶(𝑞, 𝑞̇ )) 𝑞̇
2
= 𝑞̇ 𝑇 (𝜏 + 𝐾𝑝 𝑞𝑒 − 𝑔(𝑞)).
Здесь использовался тот факт, что матрица 𝐻̇(𝑞) − 2𝐶(𝑞, 𝑞̇ ) является
кососимметричной матрицей [2]. Теперь подставим закон управления с
PD-регулятором (2.10) вместо 𝜏. В результате получим
𝑑𝑉
𝑑𝑡
= −𝑞̇ 𝑇 𝐾𝑑 𝑞̇ ≤ 0.
(2.12)
Данный результат показывает, что функция 𝑉 убывает, если вектор 𝑞̇ ≠ 0.
Этого недостаточно для доказательства желаемого результата, поскольку
вполне вероятно, что манипулятор может достичь положения, где 𝑞̇ = 0, но
𝑞 ≠ 𝑞𝑑 . Предположим, что
𝑑𝑉
𝑑𝑡
≡ 0. Тогда из (2.12) следует, что 𝑞̇ ≡ 0, отсюда
следует, что 𝑞̈ ≡ 0. Тогда из уравнения движения робота-манипулятора (2.9) с
законом управления (2.10) получаем 0 = −𝐾𝑝 𝑞𝑒 . Из того, что матрица 𝐾𝑝
положительно определенная и невырожденная следует, что 𝑞𝑒 = 0. А из
теоремы Барбашина–Красовского [11] следует, что полученное тривиальное
решение 𝑞𝑒 = 0, 𝑞̇ = 0 является асимптотически устойчивым.
Как
уже
упоминалось
ранее,
данный
метод
не
является
оптимизационным и не учитывает ограничения ни на управляющий сигнал, ни
на компоненты вектора состояния. Для получения желаемого управления
производится настройка PD-регулятора подбором коэффициентов матриц 𝐾𝑑
и 𝐾𝑝 .
Прямая задача кинематики
Выполним аналитическое решение прямой задачи кинематики для плоского
двухзвенного манипулятора с использованием метода Денавита-Хартенберга.
Задача решается в следующей последовательности:
1. Формируются системы координат сочленений.
2. Определяются параметры звеньев и сочленений
3. Формируются матрицы однородных преобразований
Матрица однородных преобразований плоского двухзвенного манипулятора:
𝑐𝑜𝑠𝜃−1
𝐀𝟎𝟏 = | 𝑠𝑖𝑛𝜃1
0
0
−𝑠𝑖𝑛𝜃1
𝑐𝑜𝑠𝜃1
0
0
0 𝑎1 𝑐𝑜𝑠𝜃1
0 𝑎1 𝑠𝑖𝑛𝜃1
|
0
1
4. Вычисляется матрица преобразования и n-ной в базовую систему
координат (число степеней свободы n=2) 𝑇20 = 𝐴10 ∗ 𝐴12
Однако в нашей работе уместно и удобнее использовать метод обратной связи,
которую мы рассмотрим ниже.
Метод линеаризации обратной связью
Метод линеаризации обратной связью, то есть устранение нелинейности и
получение желаемой линейной динамки, может быть применен к классу
нелинейных
систем,
которые
находятся
в
канонической
форме.
В
рассматриваемой задаче математическая модель объекта управления имеет
каноническую форму, поэтому мы можем использовать данный метод. Для
пояснения его основной идеи сначала рассмотрим пример системы со
скалярным входом и состоянием, а затем обобщим на многомерный случай.
Пусть имеется система
𝑥 (𝑛) = 𝑓(𝑥) + 𝑏(𝑥)𝑢,
которая представима в виде
𝑥2
𝑥1
𝑑 𝑥2
𝑥3
(…) = (
).
…
𝑑𝑡
𝑥𝑛
𝑓(𝑥) + 𝑏(𝑥)𝑢
Тогда, при условии, что 𝑏(𝑥) ≠ 0, примем закон управления в форме
𝑢=
1
(𝑣(𝑥) − 𝑓(𝑥)).
𝑏(𝑥)
В результате приходим к уравнению 𝑥 (𝑛) = 𝑣(𝑥). Теперь сформируем
регулятор вида
𝑣(𝑥) = −𝑘0 𝑥 − 𝑘1 𝑥̇ − ⋯ − 𝑘𝑛−1 𝑥 (𝑛−1) ,
где коэффициенты 𝑘𝑖 выбираются таким образом, чтобы корни полинома
𝑝𝑛 + 𝑘𝑛−1 𝑝𝑛−1 + ⋯ + 𝑘0 = 0
находились в левой полуплоскости, что обеспечивает экспоненциальную
устойчивость нулевого положения равновесия для уравнения
𝑥 𝑛 + 𝑘𝑛−1 𝑥 (𝑛−1) + ⋯ + 𝑘1 𝑥̇ + 𝑘0 𝑥 = 0,
а это значит, что lim 𝑥 = 0. Если в задаче требуется достичь желаемого
𝑡→∞
состояния 𝑥𝑑 , то закон управления зададим следующим образом:
(𝑛)
𝑣(𝑥) = 𝑥𝑑 − 𝑘0 𝑥𝑒 − 𝑘1 𝑥̇ 𝑒 − ⋯ − 𝑘𝑛−1 𝑥𝑒 (𝑛−1) ,
где 𝑥𝑒 = 𝑥 − 𝑥𝑑 – вектор отклонения от заданного положения. При этом новое
положение равновесия 𝑥 = 𝑥𝑑 будет также экспоненциально устойчивым.
Полученные
результаты
справедливы
и
для
векторного
случая.
Для удобства введем новые векторы 𝑦 = (𝑥1 , 𝑥3 )𝑇 , 𝑧 = (𝑥2 , 𝑥4 )𝑇 . Тогда система
(1.2) может быть записана в виде
𝑑 𝑦
𝑧
( ) = (𝑓(𝑥) + 𝑏(𝑥)𝜏),
𝑑𝑡 𝑧
где
𝑓(𝑥) = (
𝜏1
𝑓1 (𝑥)
𝑏 (𝑥) 𝑏12 (𝑥)
), 𝑏(𝑥) = ( 11
), 𝜏 = (𝜏 ).
𝑓2 (𝑥)
𝑏21 (𝑥) 𝑏22 (𝑥)
2
Заметим, что 𝑏(𝑥)−1 = 𝐻(𝑥). Будем искать управление в виде
𝜏 = 𝑏(𝑥)−1 (𝑣(𝑥) − 𝑓(𝑥)).
(2.13)
Сформируем функцию 𝑣(𝑥) следующим образом
𝑣(𝑥) = 𝑧̇𝑑 − 𝐾0 𝑦𝑒 − 𝐾1 𝑧𝑒 ,
где 𝑧̇𝑑 , 𝑧𝑑 , 𝑦𝑑 – задают желаемое состояние системы, 𝑧𝑒 = 𝑧 − 𝑧𝑑 , 𝑦𝑒 = 𝑦 − 𝑦𝑑
– векторы ошибок, 𝐾0 = 𝑑𝑖𝑎𝑔{𝑘01 , 𝑘02 } и 𝐾1 = 𝑑𝑖𝑎𝑔{𝑘11 , 𝑘12 } – некоторые
диагональные матрицы, обеспечивающие нахождение вещественных частей
корней системы
𝑝12 + 𝑘11 𝑝1 + 𝑘01 = 0
{ 2
𝑝2 + 𝑘12 𝑝2 + 𝑘02 = 0
(2.14)
в левой полуплоскости. В [3,4] предлагается искать матрицы в виде
𝐾0 = 𝑑𝑖𝑎𝑔{𝜆12 , 𝜆22 }, 𝐾1 = 𝑑𝑖𝑎𝑔{2𝜆1 , 2𝜆2 },
потому
что
корнями
(2.15)
системы (2.14) в этом случае будут числа
𝑝1 = −𝜆1 , 𝑝2 = −𝜆2 .
Метод
линеаризации
обратной
связью
также
не
является
оптимизационным и не учитывает ограничения ни на управляющий вектор, ни
на компоненты вектора состояния. Настройка производится подбором
коэффициентов матриц 𝐾0 , 𝐾1 .