НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
В.Н. ВАСЮКОВ
ОБЩАЯ ТЕОРИЯ СВЯЗИ
Учебник для студентов,
обучающихся по направлению
11.03.02 – Инфокоммуникационные технологии и системы связи
Новосибирск, НГТУ
2015
УДК 621.396.2
Васюков В.Н. Общая теория связи: Учебник / Новосиб. гос. техн. ун-т. – Новосибирск,
Изд-во НГТУ, 2015. – с.
Учебник содержит изложение основных вопросов общей теории связи.
Учебник рассчитан на студентов 2 – 3 курсов, обучающихся по направлению
11.03.02– Инфокоммуникационные технологии и системы связи; он также может быть полезен студентам других направлений и специальностей.
Рецензенты: д.т.н., проф. В.И. Носов
д.т.н., доц. М.А. Райфельд
© Васюков В.Н., 2015.
© Новосибирский государственный
технический университет, 2015.
2
ПРЕДИСЛОВИЕ
Мир изменился до неузнаваемости за последние несколько десятилетий благодаря фантастически быстрому развитию и распространению телекоммуникационных систем (систем связи, систем передачи информации).
Достаточно упомянуть такие достижения конца ХХ века, как появление глобальной сети Интернет, возникновение и развитие спутниковой связи, общедоступной мобильной (сотовой) связи, глобальных систем позиционирования
GPS и ГЛОНАСС, чтобы оценить уровень и темпы совершенствования техники телекоммуникаций. Начало XXI века продемонстрировало впечатляющие примеры повсеместного роста объёмов передаваемой информации и качества телекоммуникационных приложений. Телекоммуникационные технологии обеспечивают глобальную связь и навигацию, охрану транспортных
средств и помещений, работу банков, управление отраслями экономики и
войсками, экологический мониторинг окружающей среды и выполняют тысячи других важных функций, которые стали привычными и даже не замечаются. Не будет преувеличением назвать происходящее очередной научнотехнической революцией, которая ещё далеко не закончилась. Этим обусловливается потребность в подготовке высококвалифицированных специалистов
в области телекоммуникаций.
В подготовке бакалавров и магистров по направлению «Инфокоммуникационные технологии и системы связи» дисциплина «Общая теория связи»
представляет собой теоретический фундамент, на котором основывается последующее изучение профессиональных и специальных дисциплин.
Общая теория связи, по мнению автора, представляет собой систему
научно обоснованных взаимосвязанных положений, взглядов, концепций, составляющих основу мировоззрения специалиста в области телекоммуникаций. Изучение этой теории, в частности, должно дать человеку твёрдое, основанное на научном подходе представление о том, чтó в области техники
3
связи можно сделать, а чего нельзя ни при каком уровне развития технологии. Кроме того, теоретические положения должны быть при изучении подкреплены конкретными образцами их применения на практике.
Эта точка зрения в совокупности с тезисом «нельзя объять необъятное»
определили отбор материала для этого учебника. Сравнительно большое
внимание уделено принципиальным вопросам теории сигналов и линейных
стационарных цепей, включая концепцию пространства сигналов, ряд и интеграл Фурье, теорему отсчётов, понятие аналитического сигнала, элементы
теории случайных процессов, основы теории информации и др. Модуляция и
демодуляция, эффективное (статистическое) и помехоустойчивое (канальное)
кодирование, основы теории помехоустойчивости и некоторые другие вопросы рассмотрены главным образом на уровне идей с подробным изложением
частных примеров для усвоения основных понятий, с учётом того, что многочисленные, в том числе технические, подробности этих тем будут изучаться в последующих дисциплинах учебного плана. Ссылки на литературные
источники, список которых приведён в конце учебника, помогут заинтересованному читателю углубить свои знания самостоятельно.
Для понимания содержания учебника достаточно знаний основ линейной алгебры и математического анализа, а также основных понятий теории
электрических цепей.
Автор выражает глубокую признательность рецензентам д.т.н., профессору В.И. Носову и д.т.н., доценту М.А. Райфельду, а также к.т.н.
Д.О. Соколовой и к.т.н. С.Г. Филатовой за полезные замечания и предложения по улучшению учебника.
4
1. ВВЕДЕНИЕ. СИСТЕМЫ СВЯЗИ, СИГНАЛЫ, КАНАЛЫ СВЯЗИ
1.1. Общие сведения о системах связи
1.1.1. Информация, сообщение
Системы связи (телекоммуникационные системы) предназначены для
передачи информации. Информация1 – настолько фундаментальное общенаучное понятие, что ему невозможно дать точное определение; можно лишь
попытаться передать его содержание путём перечисления близких понятий,
таких, как «сведения», «данные», «новости» и т.п.
Информация передаётся посредством сообщений. Таким образом, сообщение – форма представления информации. Информация сама по себе не
существует отдельно от сообщения, так же, как масса не существует отдельно от материального тела. Примерами сообщений могут служить текст телеграммы, произнесённая фраза в телефонном разговоре, последовательность
цифр при передаче данных от одного компьютера к другому, изображение в
системе факси́мильной связи, последовательность изображений (кадров) в
системе телевидения и т.п. Обращаясь вновь к физической аналогии, можно
сказать, что как масса характеризует содержание вещества в физическом теле, так и информация является некоторой содержательной характеристикой
сообщения. Физическое тело может иметь малую массу при большом объёме; аналогично длинные сообщения могут быть «рыхлыми», малосодержательными. Поэтому закономерно возникают вопросы о количественном
определении информации, содержащейся в сообщении, а также о способах
передачи сообщений без потерь информации (или с минимальными потерями) с наибольшей скоростью2.
Сообщение представляет собой совокупность (последовательность)
знаков (символов). Символы при создании сообщения выбираются из некоторого заданного набора – алфавита. Например, текст телеграммы состоит из
1
От латинского informatio – разъяснение, понятие, осведомление. О содержании понятия информации с точки зрения теории связи, а также об определении количества информации см. подробнее разд. 8
2
Подразумевается передача за фиксированное время максимального количества информации
5
букв, цифр, пробелов и знаков препинания, а телеграфное сообщение, готовое для передачи по каналу связи – из канальных символов (например, из
«точек», «тире» и пауз при использовании «азбуки Морзе», из «нулей» и
«единиц» кода Бодό и т.д.). В системе черно-белого телевидения сообщением
является последовательность кадров, каждый из которых, в свою очередь,
представляет собой последовательность значений яркости точек экрана, упорядоченную согласно схеме телевизионной развёртки3. В телефонии сообщение – непрерывная последовательность значений изменяющегося во времени
звукового давления на мембрану микрофона.
Из приведённых примеров следует, что сообщения могут быть дискретными (состоящими из символов, принадлежащих конечному множеству
– алфавиту) или непрерывными (континуальными4, ана́логовыми5), описываемыми функциями непрерывного времени.
Всякое сообщение может существовать лишь в материальном воплощении. Так, текст телеграммы можно напечатать или написать на бумаге,
изображение можно зафиксировать на фотобумаге (при этом изменяется её
внутренняя структура) или в электронной памяти (где оно хранится в виде,
например, изменений концентрации носителей зарядов), и т.п. Любое сообщение кому-то адресовано, для кого-то предназначено. Таким образом, всегда подразумевается наличие источника сообщений и получателя6 сообщений.
3
Изображение на экране ана́логового телевизора «прочерчивается» электронным лучом переменной интенсивности; этот процесс называется развёрткой. При так называемой прогрессивной развёртке луч прочерчивает практически горизонтальные линии (строки) одну за другой, очень быстро возвращаясь после окончания одной строки к началу следующей (после окончания последней строки кадра луч возвращается к началу
первой строки и начинается формирование следующего кадра). При чересстрочной развёртке луч пробегает
сначала нечётные строки кадра, а затем его чётные строки, формируя таким образом два поля (полукадра).
4
От латинского continuus – непрерывный, сплошной
5
В приведённом выше примере с микрофоном непрерывно изменяющееся напряжение на его выходе является аналогом другой физической величины – звукового давления, отсюда название «аналоговый», применяемое к непрерывным функциям времени (или другой переменной).
6
Получатель может быть неединственным: например, в системах теле- и радиовещания одному источнику
могут соответствовать миллионы получателей.
6
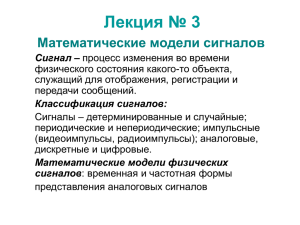
1.1.2. Сигналы
Для передачи сообщения необходим материальный носитель, физический процесс, называемый сигналом. Сигналом может быть свет костра или
фонаря, звук барабана или трубы, предмет, находящийся (или отсутствующий) в условленном месте, взмах флажка или платка и т.п. В радиотехнике и
телекоммуникации используются электрические сигналы, которые благодаря
простоте и удобству их генерирования и преобразования наилучшим образом
приспособлены для передачи больших объёмов данных на большие расстояния. Заметим, что в современных системах связи и устройствах хранения
данных электрические сигналы зачастую преобразуются в оптические или
магнитные и обратно.
Сигнал как физический процесс должен быть каким-то способом
сформирован. Для формирования телекоммуникационных электрических
сигналов применяются радиоэлектронные устройства: генераторы, модуляторы, усилители, фильтры и т.д. Теоретическое рассмотрение сигналов и методов их преобразования невозможно без их математического описания.
Естественной формой представления сигнала считается его описание некоторой функцией времени (зависимой переменной чаще всего является напряжение или сила тока). Следует сразу же отметить, что физический процесс и его
математическое описание – не одно и то же: описание представляет собой
модель явления. Модель может в большей или меньшей степени соответствовать процессу (быть более или менее адекватной), быть простой или сложной, обеспечивать бо́льшую или меньшую точность. Далее, если идёт речь о
сигнале, в большинстве случаев подразумевается его модель.
Сигналы, как и сообщения, могут быть дискретными или континуальными (аналоговыми) в зависимости от того, описываются ли они функциями
дискретного или непрерывного времени7. Зависимая переменная (обычно это
7
В обычном («бытовом») понимании время рассматривается как непрерывная величина; «дискретное время» возникает в тех случаях, когда во внимание принимаются значения сигнала лишь в отдельные моменты
7
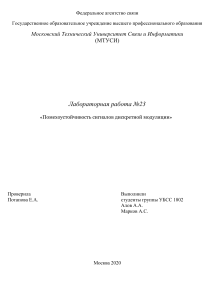
напряжение или ток) также может быть дискретной или непрерывной, в соответствии с чем можно различать четыре типа сигналов, рис.1.1.
Сигнал называется аналоговым, если его значение определено для любого момента непрерывного времени и принадлежит непрерывному множеству, например, множеству вещественных (действительных) чисел8. Такие
сигналы имеют место, например, в цепях звуковоспроизводящих устройств
(громкоговорителей или звуковых колонок). Если сигнал рассматривается
как функция непрерывного времени, но значения может принимать не любые, а лишь принадлежащие некоторому «разрешённому» множеству, он
называется квантованным. Примером может служить клиппированный сигнал, принимающий всего два значения, причём скачкообразные переходы
между этими значениями могут происходить в любые моменты непрерывного времени.
Сигнал является дискретным, если он определён лишь в отдельные
моменты времени, следующие друг за другом через постоянный интервал Td ,
но при этом может принимать произвольные значения из непрерывного множества (например, множества вещественных или комплексных чисел). Дискретный сигнал можно понимать как последовательность результатов абсолютно точного измерения мгновенных значений аналогового сигнала каждые
Td секунд.
Цифровой сигнал представляет собой последовательность чисел конечной разрядности (выражаемых конечной десятичной или двоичной дробью),
«привязанных» к определённым периодически следующим друг за другом
моментам времени. Важно подчеркнуть, что конечная разрядность значений
цифрового сигнала означает, что такой сигнал может принимать только значения из дискретного конечного множества, т.е. является одновременно дисвремени, определяемые некоторым тактовым интервалом, а в остальные моменты времени поведение сигнала игнорируется.
8
Хотя реальные сигналы всегда являются вещественными, в некоторых случаях удобно описывать их функциями, принимающими комплексные значения (например, при описании узкополосных сигналов, см. п. 2.11)
8
кретным (по времени) и квантованным (по уровню). (В литературе по связи
часто также называют цифровыми сигналы, значения которых выражаются
дробями конечной разрядности и сохраняются неизменными на временном
интервале, который называют тактовым интервалом или интервалом посылки.)
u (t )
u[n]
u (t )
t
а
u[n]
t
б
n
в
n
г
Рис.1.1 Типы сигналов: а – аналоговый, б – квантованный, в – дискретный, в – цифровой
1.1.3. Системы связи
Для передачи сообщений используются различные устройства, связанные между собой и действующие в соответствии с единым замыслом, т.е. образующие систему. Современная система связи (система передачи информации, телекоммуникационная система) представляет собой достаточно
сложную совокупность устройств, выполняющих преобразования сообщений
и сигналов с целью наиболее эффективной передачи информации от источника к получателю (или получателям). Эффективность систем связи оценивается числовыми характеристиками (показателями), к которым относятся
верность (достоверность) и скорость передачи информации, а также некоторые другие величины9. Упрощённая структурная схема аналоговой системы
связи показана на рис.1.2.
9
более подробно об этом см. п. 14
9
Рис. 1.2. Упрощённая структура аналоговой системы связи
Само назначение системы связи предполагает наличие источника и получателя сообщений. Как источниками, так и получателями могут быть люди
или технические устройства. Источник сообщений ИС порождает сообщение
a , которое преобразуется преобразователем Пр1 в сигнал b(t ) , называемый
первичным сигналом. При этом преобразовании информация, заключённая в
сообщении, передаётся первичному сигналу, поэтому его называют также
информационным сигналом. Например, в системе телефонной связи преобразователем сообщения в первичный сигнал служит микрофон, в системе телевидения – передающая телевизионная камера на основе электронно-лучевой
трубки или полупроводниковой матрицы. Первичный сигнал, как правило,
непригоден для непосредственной передачи10, поэтому он подаётся на модулятор М, где используется для модуляции другого колебания s (t ) , вырабатываемого генератором Г, более подходящего для передачи и называемого переносчиком или несущим колебанием. Например, при передаче сообщений
посредством электромагнитных волн, распространяющихся в пространстве,
необходимо использовать антенну, которая преобразует колебания электрического тока в колебания электромагнитного поля в окружающем пространстве (такая антенна называется передающей11). Для того, чтобы такое преобразование было эффективным, размеры антенны должны быть соизмеримы с
10
Как исключение, в простых системах проводной телефонии первичный сигнал может передаваться непосредственно; применение таких систем ограничивается, в частности, затуханием сигнала в проводной линии
11
Сказанное далее справедливо и для приёмных антенн, выполняющих обратное преобразование
10
длиной волны c / f , где f – частота колебания, c – скорость света. Если
полагать, что частота звука в среднем составляет 10 килогерц, то размеры антенны для создания приемлемой мощности излучения должны иметь порядок
300 000 000/10 000=30 000 метров. Таким образом, для передачи звуковых
сообщений частота излучаемых колебаний должна быть хотя бы в тысячу раз
больше, при этом информация, содержащаяся в сообщении и в первичном
сигнале, должна быть перенесена в это высокочастотное несущее колебание.
Это и достигается применением модуляции.
Модуляция означает изменение одного или нескольких параметров колебания-переносчика в соответствии с изменением первичного сигнала (или
с символами передаваемого сообщения). В качестве несущего часто используется гармоническое колебание настолько высокой частоты, что оно эффективно излучается антенной небольших размеров. Само по себе немодулированное несущее колебание информации не несёт, но после модуляции его параметры «повторяют» изменения первичного (информационного) сигнала, и
на приёмной стороне эти изменения могут быть измерены (демодулированы),
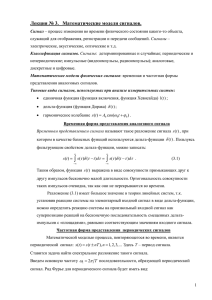
благодаря чему и происходит приём сообщения. Для примера на рис. 1.3 показаны графики первичного сигнала, несущего колебания и высокочастотного сигнала, модулированного по амплитуде. Видно, что для восстановления
первичного сигнала демодулятор должен выделить огибающую амплитудномодулированного колебания, показанную в верхней части рис. 1.3,в штриховой линией.
Следует отметить, что дискретное сообщение вовсе не обязательно
должно передаваться дискретным сигналом, а непрерывное – аналоговым.
Наоборот, для современных систем связи характерна передача, например,
аналоговых сообщений цифровыми сигналами; цифровые первичные сигналы применяют для модуляции аналоговых несущих колебаний и т.д.
11
а
б
в
Рис.1.3. Первичный сигнал (а), несущее колебание (б),
и амплитудно-модулированный сигнал (в)
Следует отметить, что дискретное сообщение вовсе не обязательно
должно передаваться дискретным сигналом, а непрерывное – аналоговым.
Наоборот, для современных систем связи характерна передача, например,
аналоговых сообщений цифровыми сигналами; цифровые первичные сигналы применяют для модуляции аналоговых несущих колебаний и т.д.
Модулированный сигнал u (t ) поступает в линию связи ЛС – физическую среду, которая благодаря своим свойствам пригодна для передачи сигнала к приёмнику. Примерами таких сред служат металлические (медные,
алюминиевые) проводники, оптическое кварцевое стекло, электромагнитное
поле в открытом пространстве и т.д. Между модулятором и линией связи
может находиться преобразователь (передающая антенна для радиолинии,
лазер для оптоволоконной линии и т.д.). Соответствующий преобразователь
необходим в этих случаях также между линией и демодулятором (приёмная
антенна для радиолинии, фотодиод для оптоволоконной и т.п.). В линии свя12
зи происходит искажение сигнала – изменение его характеристик под влиянием среды (например, затухание – ослабление колебаний с расстоянием и
вследствие поглощения энергии веществом, различного для разных частот), а
также неизбежное воздействие на сигнал вредных посторонних колебаний
(помех). Поэтому колебание z (t ) , поступающее с выхода линии связи на демодулятор ДМ, отличается от переданного сигнала u (t ) , а вырабатываемый
демодулятором сигнал b (t ) в общем случае отличается от первичного сигнала b(t ) . Качество демодулятора (и системы в целом) тем выше, чем меньше
это отличие. Сигнал b (t ) преобразуется преобразователем Пр2 в сообщение12
a , передаваемое получателю сообщения ПС. В радиовещании роль такого
преобразователя может играть громкоговоритель («динамик»), в телевидении
– жидкокристаллический или плазменный экран телевизионного приёмника,
и т.д. Напомним, что одно и то же сообщение может быть адресовано многим
получателям (например, в системах радио- и телевизионного вещания количество получателей практически неограниченно).
Любая часть системы связи, включающая физические среды и технические устройства и предназначенная для передачи сигналов, называется каналом связи. Нередко требуется обеспечить двустороннюю связь между двумя
абонентами; каждый абонент может быть источником и получателем сообщений. В таких случаях система связи содержит два практически одинаковых набора устройств, включённых во встречных направлениях. Системы
двусторонней связи, обеспечивающие обоим абонентам возможность передавать сообщения одновременно, называются ду́плексными; в некоторых системах передача в разных направлениях возможна только поочерёдно – такой
режим называется полудуплексным. Обычно это связано с поочерёдным использованием общих ресурсов – например, общей линии связи; в этом случае
12
Это сообщение в общем случае может отличаться от переданного (а в аналоговых системах отличие неизбежно).
13
должна быть обеспечена возможность переключения режима «приём–
передача».
1.1.4. Кодирование и шифрование
Рассмотренная структура системы связи является простейшей и сравнительно редко применяется на практике. В современных цифровых системах связи дискретное сообщение перед передачей часто кодируется, при
этом последовательность символов a , порождаемая источником (то есть собственно сообщение) преобразуется кодером К (рис. 1.4) в последовательность
кодовых символов c , которая поступает на вход модулятора. В модуляторе
при поступлении очередного символа происходит формирование отрезка высокочастотного колебания s (t ) (посылки) с параметрами, соответствующими
данному символу.
a
ИС
с
u (t )
М
К
s (t )
ЛС
a
с
z (t )
ДМ
ДК
ПС
помехи
Г
Рис. 1.4. Упрощённая структура дискретной системы связи с кодированием
После прохождения модулированного сигнала по линии связи, где он
подвергается искажениям и действию помех, выполняется его демодуляция,
т.е. восстанавливается кодовая последовательность c , которая затем декоди
руется декодером13 ДК, при этом восстанавливается сообщение a , которое
из-за воздействия помех может отличаться от исходного (в таких случаях говорят, что декодированное сообщение содержит ошибки). Кодирование может производиться для повышения скорости передачи информации (эффек-
13
В дуплексных или полудуплексных системах часто кодер и декодер конструктивно объединяются в одно
устройство, называемое кóдеком. Конструктивно объединённые модулятор и демодулятор образуют модéм.
14
тивное, экономное, или энтропийное кодирование14) либо для обнаружения и
исправления ошибок при приёме сообщения (помехоустойчивое или канальное кодирование). Целью кодирования может быть также согласование формы передаваемого сообщения с каналом связи. Примером последнего может
служить кодирование цифробуквенного телеграфного сообщения кодом
Морзе или кодом Бодó, которые используются в каналах связи, допускающих
лишь два значения сигнала – образно говоря, «ноль» и «не-ноль». Задаче согласования сообщения с каналом подчинена также импульсно-кодовая модуляция – преобразование непрерывного сообщения в последовательность символов для передачи по цифровому каналу (подробнее см. разд. 11).
Совокупность всех кодовых символов определённого кода называется
кодовым алфавитом. Количество символов в кодовом алфавите называют
основанием кода. Например, код Морзе имеет основание 3 (символами алфавита являются «точка», которой соответствует замыкание телеграфного ключа на короткое время, «тире», при передаче которого ключ замыкается на относительно большой промежуток времени, и «пауза», которой соответствует
разомкнутое состояние ключа). Код Бодó, алфавит которого состоит из символов 0 и 1, имеет основание 2. Символы 0 и 1 кода Бодо соответствуют
разомкнутому и замкнутому состояниям ключа.
Нередко (но не всегда) при кодировании один исходный символ
(например, буква в телеграфном сообщении) заменяется последовательностью из нескольких кодовых символов (кодовой комбинацией, кодовым словом). Кодом называется совокупность всех допустимых кодовых комбинаций. Если каждый символ сообщения заменяется при кодировании одинаковым количеством кодовых символов (то есть все кодовые слова имеют равную длину), то код называется равномерным, иначе – неравномерным. Длину
кодовой комбинации равномерного кода называют его разрядностью.
14
Используются также термины сжатие и статистическое кодирование. ГОСТ 17657-79 Передача данных.
Термины и определения диктует применение термина эффективное кодирование.
15
С кодированием не следует путать шифрование сообщений, нередко
применяемое в современных системах связи. Цель шифрования состоит в
предотвращении несанкционированного извлечения или преднамеренного изменения (подмены) передаваемой информации15. При зашифровании производится замена открытого сообщения a шифрограммой (шифротекстом) , а
при расшифровании происходит обратное преобразование. Зашифрование
выполняется до преобразования сообщения в кодовую последовательность,
рис. 1.5. Вопросами шифрования и вскрытия («взлома») шифров занимается
особая область науки – криптология; некоторые из её основных понятий излагаются в разделе 13.
ИС
a
Ш
с
u (t )
М
К
s (t )
с
z (t )
ЛС
ДМ
ДК
помехи
Г
ДШ
a
ПС
Рис. 1.5. Упрощённая структура дискретной системы связи с шифрованием
и кодированием
1.1.5. Модуляция
Как было сказано ранее, практически во всех телекоммуникационных
системах используется модуляция. Напомним, что при модуляции один или
несколько параметров несущего колебания изменяются в соответствии с изменением первичного сигнала (или с символами передаваемого сообщения).
Таким образом, на модулятор поступает первичный (аналоговый) сигнал или
последовательность кодовых символов (фактически кодовые символы при
подаче на модулятор представляются в форме цифровых сигналов).
15
Шифрование широко применяется, например, в автомобильных системах охранной сигнализации.
16
В качестве несущего часто используют гармоническое колебание
A cos(2 ft ) A cos(t ) , которое имеет три параметра – амплитуду A ,
циклическую частоту f (или круговую частоту 2 f ) и начальную фазу
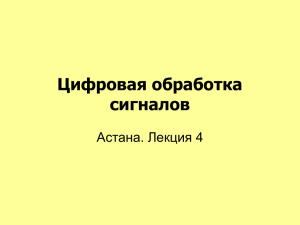
. Поэтому для гармонического переносчика возможны три вида модуляции
аналоговым первичным сигналом: амплитудная модуляция (АМ), частотная
модуляция (ЧМ) либо фазовая модуляция (ФМ)16, рис.1.6. Эти виды модуляции являются непрерывными в том смысле, что модулированный сигнал занимает на временно́й оси сплошной интервал.
u (t )
u (t )
u (t )
t
а
u (t )
t
б
t
в
t
Г
Рис.1.6. Несущее гармоническое колебание (а) и получаемые на его основе
модулированные сигналы: АМ (б), ЧМ (в) и ФМ (г)
В некоторых системах канал связи предоставляется абоненту периодически на короткое время17 (например, на 0.3 микросекунды каждые 24 мкс). В
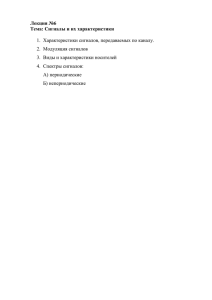
таких случаях в качестве переносчика используют периодическую последовательность импульсов одинаковой формы (часто импульсы считают в первом приближении прямоугольными18). При заданной форме импульса последовательность характеризуется амплитудным (пи́ковым) значением, длительностью импульса и периодом повторения (или частотой повторения). Поэтому при аналоговом первичном (модулирующем) сигнале различают (рис.
1.7):
– амплитудно-импульсную модуляцию (АИМ), при которой по закону
изменения первичного сигнала меняется высота (амплитуда) импульсов,
16
Два последних вида модуляции объединяют под общим названием угловая модуляция
Такие системы называются системами с временны́м уплотнением; подробности см. в разд. 11
18
Как станет ясно в дальнейшем, строго прямоугольные импульсы на практике получить невозможно
17
17
а
б
в
г
д
е
Рис.1.7. Импульсный переносчик (а), модулирующий сигнал (б), АИМ-сигнал (в),
ШИМ-сигнал (г), ФИМ-сигнал (д), ЧИМ-сигнал (е)
– широтно-импульсную модуляцию (ШИМ), при которой изменяется
длительность («ширина») импульсов19,
19
ШИМ также называют ДИМ, от слова длительность
18
– частотно-импульсную модуляцию (ЧИМ), когда в соответствии с
первичным сигналом изменяется частота следования импульсов,
– фазоимпульсную модуляцию (ФИМ), при которой пропорционально
первичному сигналу изменяется временной сдвиг импульсов относительно
начального положения.
Современные системы связи в большинстве являются цифровыми. Это
означает, что несущее гармоническое колебание модулируется цифровым
первичным сигналом. (В частности, такой сигнал может быть получен из
аналогового сигнала путём аналого-цифрового преобразования). Цифровой
сигнал связан с определёнными моментами времени, разделёнными временны́ми (тактовыми) интервалами постоянной длительности. Поэтому результат модуляции можно представить в виде колебания, составленного из отрезков высокочастотных колебаний (радиоимпульсов) с параметрами – амплитудой, частотой или начальной фазой – постоянными на интервале, но меняющимися скачкообразно при переходе к следующему интервалу. Такую ступенчатую модуляцию называют дискретной или цифровой. Различают три
вида дискретной (цифровой) модуляции – амплитудную (ДАМ, ЦАМ), частотную (ДЧМ, ЦЧМ) и фазовую (ДФМ, ЦФМ), рис. 1.8. Цифровую модуляцию называют также манипуляцией – амплитудной (АМн), частотной (ЧМн)
и фазовой (ФМн). Фрагмент манипулированного сигнала, в течение которого
модулируемый параметр не изменяется, называется элементарной посылкой,
или просто посылкой.
Модулированные сигналы при дискретных видах модуляции характеризуются технической скоростью (скоростью модуляции, скоростью телеграфирования), равной количеству элементарных посылок в секунду. Скорость модуляции выражается в бодах20 (1 Бод соответствует одной посылке в
секунду).
20
Бод назван в честь Ж.М.Э. Бодó (J.M.E. Baudot, 1845 — 1903) – известного французского инженера, автора кода Бодо и телеграфного аппарата Бодо
19
u (t )
u (t )
u (t )
t
а
t
б
t
В
Рис.1.8. Виды дискретной модуляции (манипуляции) гармонического колебания ДАМ (а)
ДЧМ (б), ДФМ (в)
Для того, чтобы можно было обоснованно выбрать систему связи из
имеющихся на рынке или предлагаемых разработчиками, необходимо рассмотреть некоторый набор показателей качества (эффективности). Наиболее
важными показателями эффективности систем связи являются верность (достоверность) и помехоустойчивость. Верность дискретных систем связи
определяется вероятностью безошибочного приёма сообщения или отдельного символа – чем больше эта вероятность, тем верность выше. Для аналоговых систем связи этот показатель непригоден, так как вероятность безошибочного приёма аналогового сигнала всегда равна нулю (подробнее см. разд.
13). Верность систем передачи непрерывных сообщений можно характеризовать средним квадратом ошибки
1
T
2
T
2
(
)
(t ) dt ,
b
t
b
0
где T – время наблюдения сигнала. Верность тем выше, чем меньше 2 .
Помехоустойчивость системы связи характеризуют отношением мощности сигнала к средней мощности помехи (отношением сигнал/помеха), при
котором обеспечивается заданная верность. Более помехоустойчивой является та система, которая обеспечивает заданную верность при меньшем отношении сигнал/помеха.
Демодуляция (детектирование) заключается в восстановлении первичного сигнала по принятому искажённому колебанию (или в восстановлении
канального символа по искажённой посылке), а декодирование – в восстановлении дискретного сообщения по кодовой последовательности. Часто перед
20
демодуляцией применяют дополнительное преобразование наблюдаемого
колебания с целью повышения верности (уменьшения вероятности ошибки
для дискретных систем или среднего квадрата ошибки – для аналоговых).
Такое преобразование называют обработкой. Оптимальной называется обработка, обеспечивающая наивысшую верность (или максимальную помехоустойчивость при заданной верности). Если оптимальная обработка оказывается слишком сложной и/или дорогостоящей, применяют квазиоптимальную
(субоптимальную) обработку, которая может быть реализована проще и дешевле и при этом обеспечивает верность, близкую к предельной. Иногда квазиоптимальная обработка заключается в частотной фильтрации принятого
колебания с целью подавления помех21.
Общий подход к разработке и проектированию современных технических систем, в том числе систем связи, заключается в получении оптимальных или хотя бы субоптимальных технические решений. Такие решения, как
правило, не могут быть получены эмпирическим путём (методом «проб и
ошибок»), для этого необходимо располагать соответствующими теоретическими, т.е. математическими методами. В основе таких методов лежит теория сигналов.
Теория сигналов представляет собой математическую теорию, описывающую с единых позиций все многообразие электрических сигналов, применяемых в проводной и радиосвязи, радио- и телевизионном вещании, радиолокации и радионавигации, автоматике и телемеханике, глобальных и локальных компьютерных сетях и во многих других областях техники. Основы
теории сигналов излагаются в разд. 2. Ниже рассматривается классификация
сигналов и помех.
21
Полное подавление помех на практике невозможно; под подавлением подразумевается существенное
уменьшение мощности помехи на выходе фильтра по сравнению со входом
21
1.2. Сигналы и помехи
1.2.1 Классификация сигналов и помех
В настоящее время в технике используется множество различных сигналов, которые принято классифицировать по различным признакам, связанным со свойствами функций, описывающих сигналы.
Аналоговые (континуальные) и дискретные сигналы различаются по
типу независимой переменной (чаще всего это время). Аналоговый сигнал
x(t ) описывается функцией непрерывной переменной, принимающей значения, например, из множества вещественных чисел t , (сама функция
при этом может не быть непрерывной), а дискретный сигнал x[n] – функцией
дискретной переменной (аргумент, принимающий дискретные значения,
принято заключать в квадратные скобки). В качестве дискретного времени
обычно рассматривают целочисленную переменную n , принимающую всевозможные целые значения от до (обозначается n , ), а дискретный сигнал называют последовательностью. Примеры аналогового и
дискретного сигналов представлены графиками на рис. 1.9. График дискретного сигнала, строго говоря, представляет собой множество точек плоскости
с координатами n по горизонтали и x[n] по вертикали при всевозможных n ,
однако такой график неудобен для зрительного восприятия, поэтому обычно
эти точки соединяют вертикальными отрезками со сплошной осью абсцисс.
Необходимо помнить, что между целочисленными точками горизонтальной
оси дискретный сигнал не существует22.
x(t)
x[n]
n
t
а
Б
Рис. 1.9 Аналоговый сигнал (а) и дискретный сигнал (б)
22
Например, нельзя сказать, что при нецелых
n
дискретный сигнал равен нулю.
22
Частным случаем аналогового сигнала является импульсный сигнал.
Импульсным называется аналоговый сигнал, определённый на бесконечной
непрерывной временнóй оси, но отличный от нуля лишь на ограниченном её
участке (носителе сигнальной функции)23. Различают видеоимпульсы, описываемые функциями, не меняющими знака в пределах носителя, или меняющими его всего несколько раз, и радиоимпульсы, меняющие знак многократно, рис. 1.10. Радиоимпульс можно представить в виде произведения видеоимпульса (называемого в этом случае огибающей радиоимпульса) и гармонического несущего колебания, т.е. радиоимпульс рассматривается как результат амплитудной модуляции гармонического колебания видеоимпульсом.
x(t)
x(t)
t
t
а
б
Рис. 1.10. Примеры видеоимпульса (а) и радиоимпульса (б)
Скалярные и векторные сигналы различаются размерностью функций,
которые их описывают. Например, сигнал на выходе микрофона представляет собой напряжение как функцию времени и является скалярным, а пару
сигналов в стереофонической системе звуковоспроизведения можно рассматривать как один векторный (размерности 2) сигнал. В некоторых случаях
удобно использовать комплексные сигналы, принимающие значения из поля
комплексных чисел. (Комплексные числа являются скаля́рами, хотя иногда их для удобства представляют ве́кторами на так называемой комплексной
плоскости.)
Многомерные сигналы, в отличие от одномерных, описываются функциями многих (двух и более) переменных. Так, черно-белое телевизионное
23
К импульсным также относят сигналы бесконечной длительности, у которых бόльшая часть энергии сосредоточена на конечном участке временной оси (таков, например, экспоненциальный импульс), тогда длина
этого участка называется эффективной длительностью импульса
23
или фотографическое изображение можно описать функцией двух пространственных переменных, отображающей яркость (светлоту́) каждой точки
изображения в зависимости от координат точки по горизонтали и по вертикали. Цветное изображение можно представить векторной (размерности 3)
функцией двух переменных, при этом компоненты вектора отображают яркости трёх цветовых составляющих, – например, красного, зелёного и синего
цветов24.
Пространственно-временные электромагнитные сигналы представляют собой распределения электромагнитного поля в пространстве и времени и
описываются векторными функциями четырёх переменных, три из которых
являются координатами в трёхмерном физическом пространстве, а четвертой
переменной служит время. Такой сигнал в каждой точке пространства и в
каждый момент времени описывается вектором размерности 6, что соответствует представлению в трёхмерном пространстве двух ве́кторов – напряжённостей электрического и магнитного полей.
Случайные сигналы, в отличие от детерминированных, при их наблюдении принимают значения, которые заранее невозможно предсказать точно,
а можно лишь высказать о них более или менее надёжные предположения.
Для описания случайных сигналов применяется математический аппарат
теории вероятностей (теория случайных процессов), а для построения систем
обработки таких сигналов и принятия решений (демодуляции) – аппарат математической статистики (теория статистических решений). Строго говоря,
все сигналы являются случайными, так как если сигнал заранее известен, то
нет нужды его принимать (а следовательно, и передавать). Тем не менее, часто сигналы при теоретическом рассмотрении описываются детерминированными функциями25. Иногда полезно рассматривать сигнал как детерми24
Такая система представления цвета называется RGB (от англ. слов red, green, blue)
Кроме того, иногда говорят о так называемых испытательных сигналах – детерминированных колебаниях, которые подаются на вход устройства, чтобы по выходному сигналу (отклику) судить о характеристиках
этого устройства
25
24
нированную функцию, описание которой содержит «элемент случайности» –
например, если случайность сигнала заключается в самом факте его передачи, или в его задержке относительно некоторого момента времени, и т.п. В
таких случаях говорят о квазидетерминированных сигналах. Важный пример
квазидетерминированного сигнала – гармоническое колебание со случайной
начальной фазой, рассматриваемое в п. 12.7.
Полезные сигналы отличаются от мешающих тем, что служат для передачи сообщений, в то время как мешающие затрудняют её и являются причиной потери информации. Часто полезный сигнал называют просто сигналом,
а мешающий – помехой. Сигналы и помехи, рассматриваемые в совокупности, будем далее называть колебаниями.
Как и сигналы, помехи можно классифицировать по различным признакам. По происхождению помехи могут быть естественными и преднамеренными (искусственными), по характеру проявления – шумовыми (флюктуационными) и импульсными и т.д. Примером естественной шумовой помехи
может служить тепловой шум, всегда присутствующий в системах связи
вследствие хаотического теплового движения частиц – атомов, молекул,
электронов и т.д. Естественные импульсные помехи возникают, например,
при грозовых разрядах. Искусственные шумовые и импульсные помехи генерируются и излучаются с целью помешать противнику передавать или получать информацию. Необходимо отметить, что одно и то же колебание может
быть полезным сигналом по отношению, например, к одной системе связи
или радиолокации и помехой – по отношению к другой. Предотвращение или
уменьшение взаимного вредного влияния различных систем достигается соблюдением мер так называемой электромагнитной совместимости. Отрасль
науки и техники, посвящённая разработке методов и средств целенаправленного вредного воздействия помех на радиосистемы противника, называется
радиопротиводействием.
25
Стоит отметить, что все помехи, как и все сигналы, являются случайными (если помеха детерминированна, то её можно исключить из наблюдаемого колебания, и таким образом избавиться от её вредного воздействия на
сообщение). На рис. 1.11 приведены примеры реализаций случайного сигнала и случайной (шумовой) помехи.
По способу взаимодействия с сигналом помехи делятся на аддитивные
(от английского add – складывать), мультипликативные (от английского multiply – умножать) и смешанные (сюда относятся все взаимодействия, не сводимые к аддитивному или мультипликативному).
Кроме перечисленных, для классификации колебаний используются и
другие признаки. Иногда различают информационные и управляющие сигналы (колебания), модулированные и немодулированные, узкополосные и широкополосные, и т. д. Некоторые из перечисленных типов сигналов будут в
дальнейшем рассмотрены подробнее.
x(t)
x(t )
t
t
А
б
Рис. 1.11. Случайный (речевой) сигнал (а) и случайная помеха (шум) (б)
1.2.2 Объём сигнала
В теории связи принято рассматривать сигнал, как «объект транспортировки». С этой точки зрения сигнал можно описать тремя «габаритными
характеристиками», подобными длине, ширине и высоте груза, перевозимого, скажем, по железной дороге. Первая из таких характеристик – длительность сигнала Tc , измеряемая в секундах (с). Любой сигнал можно представить суммой (суперпозицией) гармонических колебаний с определёнными
частотами (а также амплитудами и начальными фазами)26, поэтому вторая
26
Такое представление называется рядом Фурье или интегралом Фурье (подробнее см. разд. 2)
26
«габаритная характеристика» – ширина спектра, или ширина полосы частот
сигнала Fс , равная разности наивысшей и низшей частот его гармонических
составляющих и измеряемая в герцах (Гц). Третьей «габаритной» характеристикой служит динамический диапазон сигнала, измеряемый в децибелах (дБ)
и определяемый формулой
X
P
Dc 20 lg max 10 lg max ,
X min
Pmin
где X max и X min – соответственно максимальное и минимальное возможные
значения сигнала (напряжения или тока), Pmax и Pmin – максимальная и минимальная мгновенные мощности сигнала. Произведение трёх перечисленных габаритных характеристик называется объёмом сигнала
Vс Tс Fс Dс .
1.3. Системы и каналы связи
1.3.1. Классификация систем связи
Системы связи можно подразделить в соответствии с их назначением
на системы телефонии, телеграфии, фототелеграфии, телевидения, телеметрии, телеуправления и передачи данных.
Системы телефонной связи предназначены для передачи речевых, а
также других звуковых сообщений. Источниками и получателями сообщений
в таких системах, как правило, являются люди. Сообщение (речь, музыка и
т.д.) преобразуется в первичный сигнал микрофоном (системой микрофонов
в случае стереофонической передачи), выходной сигнал в сообщение – динамическим
громкоговорителем
(«динамиком»),
головными
телефонами
(«наушниками») и т.п. Системы телефонной связи подразделяются на профессиональные и вещательные. Обычный бытовой радиоприёмник представляет собой часть вещательной системы телефонной связи.
Системы телеграфной связи предназначены для передачи символьных
(цифробуквенных) сообщений. В настоящее время в таких системах применяются стартстопные печатающие аппараты (телетайпы), имеющие клавиа27
туру, хотя изредка ещё используется манипуляция телеграфным ключом на
основе кода («азбуки») Морзе.
Системы фототелеграфной (факси́мильной27) связи применяются для
передачи неподвижных изображений. Изображение (сообщение) путём построчного сканирования «развёртывается» в одномерный временнóй (первичный) сигнал, который после передачи по каналу связи подвергается обратному преобразованию в двумерное изображение.
Телевизионные системы также передают неподвижные изображения, но
развёртка осуществляется в передающей камере многократно (периодически), благодаря чему последовательно сменяющие друг друга изображения
(кадры) на экране телевизионного приёмника создают у наблюдателя (получателя сообщения) иллюзию движения. Как и телефонные системы, системы
телевидения подразделяются на профессиональные и вещательные. К профессиональным относятся, например, широко распространённые системы
видеонаблюдения.
Системы телеметрии предназначены для передачи измерительной информации, системы телеуправления – для передачи команд (управляющих
воздействий). Иногда те и другие объединяют под общим названием систем
телемеханики. В телеметрических системах первичный сигнал вырабатывают измерительные преобразователи (датчики), преобразующие значения измеряемых физических величин (давления, температуры, ускорения и т.п.) в
значения напряжения или тока. Сообщение на выходе системы может предъявляться получателю через устройство отображения (индикатор) или подвергаться анализу средствами вычислительной техники. Особенностью систем
телеуправления является то, что роль выходного преобразователя играет исполнительный механизм – орган управления объектом (например, манипулятором радиоуправляемого робота, рулями крылатой ракеты и т.п.).
27
От латинского fac simile – "сделай подобное"
28
Для передачи цифровых данных (например, для связи между компьютерами в локальных и глобальных сетях) используют системы, которые
называются системами передачи данных.
Современный уровень цивилизации характеризуется широчайшим использованием систем записи и воспроизведения информации, которые также
можно считать системами связи, передающими сообщения из прошлого в будущее.
Приведённая классификация является достаточно условной, и можно
привести примеры систем, решающих несколько задач из приведённого перечня. Например, автомобильная охранная система сигнализации сочетает в
себе признаки систем телеметрии (измеряется и передаётся на брелок температура двигателя и воздуха в салоне) и телеуправления (передаются с брелока команды на открытие или закрытие дверей, на запуск двигателя и др.).
1.3.2. Каналы связи
Совокупность устройств и линий связи, которые сигнал проходит последовательно между любыми двумя точками системы связи, называется каналом связи. Каналы связи могут соединяться последовательно друг с другом, образуя новый канал, один канал может входить составной частью в
другой канал и т.д.
Если сигнал рассматривается как объект транспортировки, то канал
связи можно уподобить транспортному средству, которое характеризуется
параметрами, аналогичными параметрам сигнала:
Tк – время действия канала, измеряемое в секундах;
Fк – ширина полосы пропускания канала, измеряемая в герцах;
29
Dк – динамический диапазон канала в децибелах, определяемый мак-
симальным и минимальным значениями сигнала, которые могут передаваться по данному каналу28.
Произведение указанных характеристик называется ёмкостью (объёмом) канала Vк Tк Fк Dк . Передача информации без потерь возможна, если
объём сигнала не превосходит ёмкости канала Vc Vк .
Отметим, что при этом возможен «обмен» одних параметров сигнала
на другие: например, если время действия канала меньше длительности сигнала, можно «сжать» сигнал во времени путём его записи на магнитную ленту и воспроизведения при передаче с повышенной скоростью. При этом полоса частот сигнала станет во столько же раз шире, во сколько раз сократится
время передачи; объём сигнала сохраняется. Ярким примером обмена динамического диапазона на время может служить передача информации на
сверхбольшие расстояния: например, изображения поверхности Венеры, полученные автоматическими межпланетными станциями «Венера-9» и «Венера-10» и имеющие большой динамический диапазон, передавались на Землю
по каналу связи с малым динамическим диапазоном в течение длительного
времени (одна строка изображения, содержащая всего 115 элементов, передавалась в течение 3,5 секунд, передача панорамного изображения (517
строк) заняла около 30 минут) [1]. Также можно «обменять» динамический
диапазон на полосу частот, применяя для передачи в условиях сильного шума помехоустойчивый код с короткими широкополосными элементарными
сигналами, принимающими всего два значения.
Каналы связи подразделяются
по назначению – на телеграфные, фототелеграфные, телефонные,
телевизионные, телеметрические, каналы звукового вещания, телеуправления, передачи данных и т.д.;
28
Максимальное значение сигнала ограничивается, в частности, энергетическими характеристиками (мощностью передатчика) и электрической прочностью устройств, входящих в канал, минимальное – шумами
(помехами), действующими в канале
30
по виду используемой среды – на проводные (воздушные, кабель-
ные, волноводные, световодные) и радиоканалы (радиорелейные,
ионосферные, тропосферные, метеорные, спутниковые, космические)29;
по характеру взаимосвязи входных и выходных сигналов – на ли-
нейные и нелинейные, стационарные и нестационарные, детерминированные и случайные (стохастические);
по количеству независимых переменных в описании сигналов – на
временны́е и пространственно-временные;
по характеру входных и выходных сигналов – на непрерывные
(аналоговые), дискретные (цифровые), полунепрерывные (дискретно-аналоговые и аналого-дискретные).
Эта классификация, как и любая другая, является условной и может
быть дополнена. В частности, широко известна классификация радиовещательных каналов по длине волны (длинные, средние, короткие и ультракороткие волны), табл. 1.1.
Таблица 1.1
Диапазон частот
30…300 Гц
300…3000 Гц
3…30 кГц
30…300 кГц
300…3000 кГц
3…30 МГц
30…300 МГц
300…3000 МГц
3…30 ГГц
30…300 ГГц
300…3000 ГГц
Диапазон волн
1000…10000 км
100…1000 км
10…100 км
1…10 км
100…1000 м
10…100 м
1…10 м
10…100 см
1…10 см
1…10 мм
0,1…1 мм
Название частот
Сверхнизкие (СНЧ)
Инфранизкие (ИНЧ)
Очень низкие (ОНЧ)
Низкие (НЧ)
Средние (СЧ)
Высокие (ВЧ)
Очень высокие (ОВЧ)
Ультравысокие (УВЧ)
Сверхвысокие (СВЧ)
Крайне высокие (КВЧ)
Гипервысокие (ГВЧ)
Название волн
Мириаметровые
Километровые
Гектометровые
Декаметровые
Метровые
Дециметровые
Сантиметровые
Миллиметровые
Децимиллиметровые
Контрольные вопросы
1. Чем отличается сигнал от помехи?
2. В чём заключается отличие искажения от помехи?
29
Применяют также акустические каналы подводной связи, использующие ультразвуковые колебания
31
3. Приведите несколько примеров преобразователей сообщения в первичный сигнал и преобразователей сигнала в сообщение.
4. Зачем применяется модуляция? Приведите пример системы связи без
использования модуляции.
5. Назовите виды модуляции при гармоническом переносчике.
6. Что такое скорость модуляции? В каких единицах она измеряется?
7. Перечислите виды модуляции при импульсном переносчике.
8. В чем состоит назначение демодулятора?
9. Что такое моде́м?
10. Что такое оптимальная обработка? квазиоптимальная обработка?
11. Что такое верность и помехоустойчивость?
12. Что такое ёмкость канала? При каких условиях возможна передача без
потерь информации?
Упражнения
1. Рассчитайте максимальное количество каналов передачи речевых сообщений в диапазонах длинных, средних, коротких, метровых, дециметровых и сантиметровых волн (речевой сигнал по стандарту для телефонной связи занимает полосу частот от 300 до 3400 Гц).
2. В оптоволоконной линии передачи используются волны длиной
0.85...1.8 мкм. Определите максимальное количество речевых сообщений, которые можно передавать одновременно по одному световодному волокну (примите, что скорость света в оптоволокне в 1,5 раза
меньше, чем в вакууме).
3. Рассчитайте количество телевизионных каналов, которые можно разместить в диапазонах длинных, средних, коротких, метровых, дециметровых и сантиметровых волн30, если для передачи одной ТВ-
30
На практике для ТВ-вещания в метровом диапазоне выделены частоты 48,5...100 МГц (1–5 каналы) и
174...230 МГц (6–12 каналы). В дециметровом диапазоне в полосе частот 470...790 МГц располагаются 40
каналов (с 21-го по 60-й).
32
программы (включая изображение и звук) отводится полоса частот шириной 8 МГц.
4. Определите порядок частоты несущего колебания при размере антенны
3 см.
5. Громкость звука часто выражают в децибелах. Уровень громкости
определяется выражением L 20 lg( pэфф / pо ) , где pэфф – эффективное звуковое давление в паскалях (Па), а pо 20 мкПа – стандартный
порог слышимости. Определите звуковое давление, создаваемое шелестом листьев (10 дБ), обычным разговором (60 дБ), громкой музыкой
(120 дБ).
6. В децибелах выражают относительные значения величин, имеющих
размерность мощности или напряжения (тока). Отношение мощностей,
выраженное в децибелах, связано с этой же величиной, выраженной в
«разах», соотношением [дБ] 10 lg[раз] . Аналогичная формула, связывающая отношения напряжений (токов), имеет вид [дБ] 20 lg[раз] .
Динамический диапазон речи диктора составляет примерно 30 дБ,
симфонического оркестра – 95 дБ. Определите, во сколько раз самый
громкий звук речи диктора больше по мощности и по напряжению на
выходе микрофона, чем самый слабый звук (то же для оркестра).
7. Телевизионный сигнал изображения занимает полосу частот шириной
примерно 6,5 МГц. Считая, что динамический диапазон составляет 48
дБ (уровни яркости от 1 до 256), определите время, необходимое для
передачи одного ТВ-кадра по телефонному каналу (полоса частот
300…3400 Гц, динамический диапазон 20 дБ).
8. Изображение 512512 точек с динамическим диапазоном 48 дБ (уровни
яркости от 1 до 256), полученное автоматической станцией на поверхности одной из планет, передаётся на Землю по каналу связи в течение
33
10 с. Определите требуемую полосу частот F , если известно, что
F 1.5 , где – скорость передачи в бодах.
34
2. ОСНОВЫ ТЕОРИИ СИГНАЛОВ
2.1. Простейшие модели сигналов
В процессе своего развития любая технология проходит ряд этапов.
Вначале устройства и процессы конструируются главным образом на основе
интуиции (эвристическим путём, или «методом проб и ошибок»). По мере
усложнения технологии возрастает стоимость «проб» и цена ошибок, допущенных при проектировании, а с расширением области её применения растут
суммарные потери вследствие неоптимальности решений. Поэтому производителям современной техники приходится вести исследовательские работы
по повышению эффективности принимаемых решений (схемных, конструкторских, технологических), параллельно развиваются теоретические методы
анализа и синтеза (построения) систем. Всё сказанное в полной мере относится к телекоммуникационным технологиям.
В современных системах связи применяются сложные методы преобразования сигналов, направленные на повышение верности передачи информации, помехоустойчивости, надёжности связи и т.п. Построение таких систем,
характеристики которых приближаются к предельно достижимым, немыслимо без применения строгих математических методов синтеза систем и анализа их эффективности.
Таким образом, естественно возникает вопрос о способах математического описания (математических моделях) сигналов и каналов связи и о
возможностях преобразования различных моделей друг в друга. В качестве
математических моделей сигналов обычно используются подходящие функции или их комбинации (суммы и/или произведения функций, их производных и первообразных и т.п.). Ниже кратко описываются некоторые из простейших функций, используемых в качестве составных частей при построении моделей самых различных сигналов.
35
A). Гармоническое колебание A cos(2 ft ) или A sin(2 ft ) , где A –
амплитуда, f – частота31, – начальная фаза колебания. Часто для сокращения записи используют круговую частоту 2 f . Во многих случаях используется комплексное гармоническое колебание A exp j (2 ft ) , где
j 1 . Это колебание можно согласно формулам Эйлера представить сум-
мой A cos(2 ft ) j A sin(2 ft ) .
Если для некоторой функции s (t ) выполняется условие
s (t ) s (t T ) ,
где T – постоянная, то функция называется периодической, а величина T – её
периодом. Вещественная периодическая функция, удовлетворяющая условиям Дирихле, которые обычно на практике выполняются, может быть представлена в виде ряда Фурье
s(t )
2
Ak cos( T
k 0
kt k ) ,
состоящего из гармонических функций32 с частотами, кратными величине
1/ T .
B). Функция включения Хэвисайда, рис.2.1, а, определяемая выражением
1 при t 0,
(t ) 0.5 при t 0,
0 при t 0.
(2.1)
Функцию Хэвисайда, в частности, удобно использовать для представления
прямоугольного импульса единичной амплитуды и единичной длительности
r (t ) (t 0.5) (t 0.5) .
Прямоугольный импульс амплитуды A и длительности и , рис. 2.1,б, описывается выражением x(t ) Ar (t / и ) .
f
31
Чтобы отличать частоту
32
Для краткости слагаемые ряда, а также их частоты, называют кратными гармо́никами
от круговой (угловой) частоты
, её называют циклической частотой [2]
36
Нетрудно видеть, что любую ступенчатую (кусочно-постоянную)
функцию можно представить суммой функций Хэвисайда с соответствующими коэффициентами и сдвигами по оси времени. Непрерывные функции
могут быть представлены такими суммами приближённо (аппроксимированы).
(t )
1
0
А
t
и / 2 0
x (t )
и / 2
t
а
б
Рис. 2.1 Функция Хэвисайда (а) и прямоугольный импульс (б)
Пусть s (t ) – некоторая функция, для которой выполнено условие
s (t ) 0 при t 0 . Разбивая ось времени на равные отрезки длины t , можно
записать приближённое равенство
s(t ) s(0) (t )
s (n 1)t s nt (t nt ) ,
(2.2)
n 0
где слагаемое с номером n описывает «ступеньку», сдвинутую вправо на n
интервалов t и имеющую высоту, определяемую приращением функции
s (t ) за время от nt до ( n 1) t .
Умножив и поделив каждое слагаемое на t , получим
s(t ) s(0) (t )
s (n 1)t s nt
(t nt )t .
t
n 0
Очевидно, точность аппроксимации тем выше, чем меньше интервал t . Поэтому, выполнив предельный переход t 0 , получим точное выражение
s (t ) s (0) (t )
0
ds ( )
(t )d .
d
(2.3)
37
называемое динамическим представлением непрерывной функции, равной
нулю при t 0 . (В качестве упражнения предлагается вывести из (2.3) представление сигнала, отличного от нуля на всей временно́й оси.)
Аналогично выражению (2.2) можно образовать ступенчатую аппроксимацию непрерывной функции суммой прямоугольных импульсов длительности t , примыкающих друг к другу по временной оси:
s(t )
Здесь
s nt t nt )
r
t .
t
t
n
(2.4)
1 t
r – прямоугольный импульс длительностью t и высоt t
той 1 / t ; таким образом, площадь импульса равна 1. Нетрудно убедиться
непосредственной подстановкой, что в выражении (2.4) точное равенство
имеет место при всех t nt , n , . Очевидно также, что точность аппроксимации повышается при уменьшении длительности импульсов. Предельный переход при t 0 даёт ещё одну форму динамического представления функции
s (t )
s( ) (t )d .
(2.5)
C). В выражении (2.5) использовано обозначение (t ) для предела последовательности импульсов единичной площади при стремлении длительности
импульсов к нулю
1 t
r .
t 0 t t
(t ) lim
(2.6)
Этот предел известен как -функция Дирака (читается «дельта-функция»),
которая на самом деле является обобщённой функцией, то есть, строго говоря, не функцией в обычном смысле слова [3]. Определяется -функция выражением
38
s (t0 )
s (t ) (t t0 )dt ,
(2.77)
котоорое извеестно, как
к фильтруующее (сттробирую
ющее33) сввойство -функци
ии.
Это означаетт, что -ф
функция, входящаая в произзведение ппод знако
ом интегррала, ввыделяет бесконеч
чно узкий
й «срез» (отсчёт
(
мгновенн
м
ного значеения) фун
нкции s (t ) в тоочке t t0 . Выражеение (2.7) можно понимать,
п
как пред
дел
1 t t0
dt .
t
s(t ) t r
t 0
s (t0 ) lim
Опредееляя -ф
функцию как пред
дел последовательнности всёё более кок
ых34 импулльсов со всё больш
шей ампллитудой и единичн
ной
роткких прямооугольны
площ
щадью, можно
м
(неестрого) ссчитать -функцию
ю «импулльсом» ну
улевой дллителььности и бесконеч
чной ампллитуды с единично
ой площаадью, рисс. 2.2. Тоггда
вырражение (2.5) можн
но поним
мать как представл
ление неппрерывно
ой функции
s (t ) суммой сдвинуты
ых «импуульсов» (t ) , ум
множенны
ых на «ко
оэффициеенты» s ( ) и прримыкающ
щих друг к другу по
п времен
нной оси ббез перек
крытия.
Рис. 2.22. К опред
делению -функцции
33
Подд стробироваанием в радиотехнике и с вязи понимаеется выделен
ние из наблюддаемого колеебания коротккого фррагмента (главвным образом с целью поодавления помех, находящ
щихся вне задданного врем
менного интеррвала)
34
В ддействительноости для определения --функции фо
орма импульссов не имеет ззначения, важ
жно лишь, чттобы ихх площадь бы
ыла равна 1.
39
Не следует, однако, забывать, что (t ) – это не обычная, а обобщённая
функция, которая имеет особые свойства: так, например, -функцию можно
дифференцировать35, но нельзя возводить в квадрат. Поэтому, например, выражение «энергия -функции» не имеет смысла. Нужно отметить, что функция играет в теории сигналов исключительно важную роль, и в дальнейшем часто будет использоваться. График -функции построить невозможно, но обычно её символически показывают на графиках вертикальной
стрелкой, которую помечают соответствующей надписью.
Учитывая, что в правой части выражения (2.6) фигурирует чётный
прямоугольный импульс единичной площади, можно записать
0 при t 0,
(t )dt 0.5 при t 0,
1 при t 0.
t
Сопоставляя это выражение с формулой (2.1), легко видеть, что функция Хэвисайда связана с -функцией выражением
(t )
t
(t )dt ,
(2.8)
следовательно,
(t )
d (t )
dt
(2.9)
Функция Хэвисайда не является непрерывной, поэтому в классическом
смысле она не может иметь производной, но использование -функции позволяет формально дифференцировать разрывные функции.
Перечисленные сигналы являются аналоговыми, т.к. описываются
функциями непрерывного аргумента – времени t , . Для представления дискретных сигналов (последовательностей) используются функции це-
35
Производная
-функции '(t )
определяется выражением
s '(t0 )
s(t ) '(t t0 )dt .
40
лого аргумента n , , обладающие свойствами, аналогичными свойствам
функций (А – С):
a) гармонические
последовательности
x[n] A sin( n )
и
x[ n] A cos( n ) , а также комплексная экспоненциальная последовательность x[n] A exp[ j ( n )] A cos( n ) jA sin( n ) ;
b) ступенчатая последовательность, рис. 2.3,а, аналогичная функции Хэвисайда и определяемая выражением
1 при n 0,
u[ n]
0 при n 0;
c) функция целой переменной, называемая -последовательностью и играющая в теории дискретных сигналов роль, аналогичную роли функции для аналоговых сигналов36, определяется выражением
1, n 0,
0, n 0,
[n]
и является вполне обычной (не обобщённой) функцией, которую можно
представить графиком, рис. 2.3, б.
1
1
0
а
n
0
n
б
Рис. 2.3 Ступенчатая единичная последовательность (а) и
-последовательность (б)
Операция дифференцирования для функций дискретного аргумента не
может быть определена (так как на дискретной числовой оси нельзя задать
бесконечно малое приращение аргумента) и заменяется вычислением разности соседних отсчётов, поэтому выражениям (2.8) и (2.9) соответствуют со36
Нередко в литературе эту последовательность называют дельта-функцией, что, конечно, неправильно.
Распространено также не совсем корректное наименование «единичный импульс».
41
отношения, в справедливости которых можно убедиться непосредственной
проверкой, а именно
u[n]
n
[k ]
и
[n] u[n] u[n 1] .
k
Дискретный сигнал x[n] , n , , можно представить выражением,
аналогичным динамическому представлению аналогового сигнала (2.5):
x[n]
x[k ] [n k ] .
(2.10)
k
Это выражение, в справедливости которого легко убедиться непосредственной подстановкой, означает, что сигнал x[n] представляется суммой сдвинутых -последовательностей (при всевозможных целых сдвигах k ), при этом
каждая -последовательность умножается на соответствующий амплитудный коэффициент, равный x[k ] .
Используя функции (А – С) и (а – с) при различных значениях параметров (амплитуд, частот и начальных фаз для гармонических функций, а также
амплитудных множителей и временны́х сдвигов для остальных) и образуя их
комбинации – суммы, произведения и т.п. – можно получить представления
(модели) для очень широкого класса сигналов (континуальных и дискретных)
– фактически для всех сигналов, применяемых на практике. Однако во многих случаях удобнее оказываются иные модели.
Представление сигнала (колебания) в виде графика описывающей его
функции является наглядным и привычным. В самом деле, в большинстве
случаев сигналы представляют собой функции времени, а одним из наиболее
распространённых приборов для наблюдения и измерения характеристик
электрических сигналов является осциллограф, отображающий именно временной график сигнала.
42
Временнóе представление не является, однако, ни единственным, ни самым лучшим, и на практике при решении конкретных задач следует выбирать наиболее удобные формы описания сигналов.
2.2. Векторное представление сигналов
Основное неудобство, связанное с временны́м представлением сигналов,
заключается в том, что сигналу соответствует сложный объект (функция,
изображаемая графиком) в простом, двумерном пространстве (на плоскости). Формы графиков бесконечно разнообразны, поэтому трудно «навести
порядок» в этом многообразии. В современной теории сигналов используется
представление сигнала простым объектом (точкой или вектором) в сложном,
многомерном пространстве [4]. При этом все сигналы становятся как бы
«одинаковыми», а различия между ними (различия формы) сводятся к различному положению изображающих их точек в пространстве. Это пространство представляет собой множество всевозможных сигналов, рассматриваемых в данной задаче, наделённое соответствующими структурными свойствами (в частности, определено расстояние между сигналами, «длина» сигнала как вектора, а также другие полезные характеристики). При этом свойства сигналов получают наглядное геометрическое истолкование, а для синтеза и анализа сигналов и систем их обработки применяется математический
аппарат – линейная алгебра и функциональный анализ.
Основные идеи векторного представления проще изложить для дискретных сигналов, а затем распространить их и на аналоговые сигналы. Рассмотрим для примера множество дискретных сигналов, таких, что все значения
(отсчёты) этих сигналов равны нулю, за исключением значений, соответствующих моментам дискретного времени n 1 и n 2 . Если значения сигнала x[n] рассматривать как абсциссу x[1] x1 и ординату x[2] x2 точки на
плоскости, то каждому такому сигналу соответствует единственная точка на
плоскости, и наоборот, каждой точке на плоскости соответствует единствен-
43
ный
й сигнал. Таким образом,
о
п
получаем
м взаимно
о-однознаачное преедставлен
ние
всегго множесства таки
их сигнал ов точкам
ми (векто
орами) дввумерного
о евклидоова
просстранстваа (плоско
ости), рисс.2.4, а. Множеств
М
о всех диискретных сигналоов,
котоорые моггут иметьь три нен
нулевых отсчёта
о
(н
напримерр, при n 1 , n 2 и
n 3 ), предсставляетсяя взаимноо-однознаачно множ
жеством векторов в трёхмеерном
м простран
нстве, рисс. 2.4, б.
а) предсставление сигнала
с
точчкой
(векктором) на плоскости
б) предстаавление сиигнала векттором
в трёх
хмерном прространствве
Рис.2..4
Продолж
жая эти рассуждеения, при
иходим к предстаавлению множесттва
всехх сигналоов, определяемых их значеениями в конечном
м множеестве точ
чек
дисккретной временнó
в
мерного еве
й оси n 1,2,..., N множесттвом вектторов N -м
клиддова просстранстваа. Каждый
й такой веектор преедставляеет собой упорядоче
у
енныйй набор чи
исел (коо
ординат), равных значениям
з
м сигналаа в соотвеетствующ
щие
мом
менты вреемени. Ясно, что такое пр
редставлеение являяется взаи
имно одн
нозначчным, а, следовате
с
ельно, не приводи
ит к потер
ре информ
мации пр
ри перехооде
от ссигнала к вектору и обратн
но. Поэто
ому векто
оры могутт служитьь моделям
ми
сигн
налов.
Несмотрря на то, что евкллидово пространс
п
ство разм
мерности выше тррёх
обы
ычный челловек представитьь не в состоянии
и, N -мернное евкл
лидово прростраанство явлляется веесьма обы
ычным и удобным
у
инструмеентом иссследовани
ия,
так как свой
йства евкл
лидова п
пространсства сохрааняются при любой его раазмерн
ности. Крроме того
о, в болььшинстве случаев интерес представвляют парры
44
сигналов (векторов), а любые два вектора лежат в общем для них двумерном
подпространстве (плоскости). Таким образом, даже не очень богатого пространственного воображения оказывается вполне достаточно для того, чтобы
ориентироваться в сигнальном пространстве любой размерности.
Устремляя N к бесконечности, получаем бесконечномерное евклидово
пространство, пригодное для представления всех дискретных сигналов,
определённых на бесконечной целочисленной временнóй оси n , . Это
пространство имеет бесконечное, но счётное множество «координатных
осей». Каждому дискретному сигналу взаимно однозначно соответствует
бесконечный (счётный) упорядоченный набор координат вектора, равных,
например, отсчётам этого сигнала в соответствующие моменты дискретного
времени n , .
Переходя к континуальным (аналоговым) сигналам, получаем бесконечномерное пространство с несчётным множеством (континуумом) «координатных осей», при этом сигналу соответствует бесконечный несчётный упорядоченный «набор координат» вектора, равных (нестрого говоря) отсчётам
этого сигнала в соответствующие моменты времени, которые теперь следуют
друг за другом «бесконечно плотно», то есть непрерывно. Таким образом, и
дискретные, и аналоговые сигналы могут быть представлены векторами в
линейных пространствах соответствующих размерностей.
Следует ещё раз подчеркнуть, что сигнал как реальный физический процесс не совпадает с его математическим описанием в виде некоторой функции времени, которая, таким образом, является лишь моделью сигнала. В
равной степени и описание сигнала вектором в пространстве соответствующей размерности также служит его моделью, и выбор модели при решении
конкретных задач должен определяться исключительно соображениями
удобства.
45
Чтобы использовать преимущества векторных моделей, следует вначале
убедиться в том, что действиям над векторами, т.е. элементами линейного
пространства, соответствуют операции, применимые к реальным сигналам.
2.3. Сигналы и действия над ними
В каждой практической задаче, связанной с получением (генерировани-
ем), передачей, приёмом и обработкой сигналов, рассматриваются сигналы
из определённого множества. Так, в задаче приёма сообщений, передаваемых по радиоканалу, для которых известны моменты начала и окончания передачи, можно рассматривать множество M T всех континуальных сигналов,
заданных на конечном временнóм интервале t [0,T ] (всегда можно совместить точку t 0 с началом интервала наблюдения). В задаче цифровой
фильтрации интерес может представлять множество всех дискретных сигналов, определённых на конечном участке дискретной временнóй оси n 1, N .
Сигналы из одного множества обладают некоторыми общими свойствами,
что и позволяет рассматривать множество, как одно целое.
На практике над электрическими сигналами выполняются некоторые
действия (операции), такие, например, как сложение (суммирование). Для
этого применяются устройства, называемые сумматорами. Кроме того, суммирование происходит естественным путём при распространении различных
сигналов в общем канале связи или в пространстве, и в этом случае говорят о
взаимных помехах. Суммирование применимо к сигналам (функциям), имеющим общую область определения. Например, складывая сигналы s1(t ) и
s2 (t ) , определённые на конечном интервале [0, T ] , получаем сигнал s3 (t ) ,
определённый на этом же интервале (сумма сигналов из множества M T снова принадлежит M T ), рис. 2.5. В таких случаях говорят, что множество сигналов замкнуто относительно сложения.
Вторая операция, часто применяемая на практике – умножение сигнала
на некоторый постоянный коэффициент. Множитель может быть больше
46
единицы, что соответствует усилению сигнала, или меньше единицы, тогда
имеет место ослабление. Ослабление может быть естественным (вследствие
затухания сигнала в линии передачи или рассеяния энергии в пространстве)
или преднамеренным, выполняемым, например, с помощью устройств, называемых аттенюаторами. Усиление выполняется при помощи усилителей.
Множитель может быть и отрицательным, тогда меняется полярность (знак)
сигнала, а соответствующее устройство называют инвертирующим усилителем, или инвертором. На рис. 2.6 сплошной линией показан пример исходного сигнала, пунктиром тот же сигнал, усиленный вдвое, а штриховой линией
– инвертированный сигнал (умноженный на число –1). И сложение сигналов,
и умножение сигнала на скалярный коэффициент определяются через обычные сложение и умножение чисел путём их применения к мгновенным значениям сигналов при каждом значении временнóй переменной.
Рис.2.5. Сигнал (а), помеха (б) и сумма сигнала и помехи (в)
47
Рис. 2.6. Исходный,
И
уусиленный
й и инверти
ированный сигналы
Обычно предпол
лагается, ччто множ
жество сигналов заамкнуто относител
о
льно уумножени
ия на числ
ло, таким
м образом
м, усилени
ие или осллаблениее сигнала не
наруушает егоо принадл
лежности к данном
му множеству.
С учётом сказанн
ного нетррудно вид
деть, что сигналы «похожи
и» на вектторы, которые тоже мож
жно складдывать и умножать
у
ь на коэф
ффициенты
ы, при этоом
резуультат таккже оказы
ывается ввектором. Это схо
одство мнножества сигналовв с
мноожеством векторовв – линей
йным (веккторным)) простраанством – позволяяет
расссматриватть сигнал
лы как веекторы, т.е.
т испол
льзовать линейноее простраанкоторое в таком случае
ствоо в качесттве модели для мноожества сигналов,
с
с
есттествеенно назы
ывать про
остранст
твом сигн
налов. Дл
ля лучшеего поним
мания далльнейш
шего излложения напомним
н
м основные свойсства линеейного пр
ространсттва
(см. также Прриложени
ие 1).
22.4. Линейное про
остранств
во
Линейны
ым просттранством
м называеется множество M объек
ктов (вектторов)), удовлеттворяющеее следую
ющим акссиомам.
А. Для любых
л
дввух элемеентов (веекторов)
из
и M опрределена бинарнаяя37
́
оперрация слоожения, причём
п
ссумма вновь прин
надлежит M (мно
ожество M
замккнуто отн
носительн
но сложеения), то есть x M y M : ( x y ) M (
читаается «длля всех» или «для ллюбого»)..
Выполняяются слеедующие аксиомы
ы сложени
ия:
1. ассоциаативностьь x, y, z M : x ( y z ) ( x y ) z ;
37
Бин
нарной или двухместной
д
называется
н
ооперация, при
именяемая к паре
п
объектоов (операндовв); в алгебре
кромее бинарных операций
о
рассматриваютсся также унар
рные (одномеестные), терннарные (трехм
местные) и т.д.
48
2. существование элемента, нейтрального относительно сложения (нуле
вого вектора) 0 M : x M : x 0 x ( читается «существует»);
3. существование для каждого вектора противоположного ему элемента
x M ( x) M : x ( x) 0 ;
4. коммутативность x, y M : x y y x .
Перечисленные аксиомы известны в высшей (абстрактной) алгебре, как аксиомы коммутативной группы38 по сложению.
В. Для любого вектора из M определена операция умножения на скаляр
(элемент некоторого поля – как правило, поля вещественных или
поля комплексных чисел)39, причём результирующий вектор принадлежит
M . Иными словами, множество M замкнуто по умножению на скаляр:
x M : x M .
Выполняются следующие аксиомы умножения на скаляр:
1) ассоциативность x M , : ( x) ( ) x x ;
2) существование в поле скаляров нейтрального по умножению элемента
– единицы: 1 : x M :1x x ;
3) дистрибутивность сложения векторов и умножения векторов на скаляры (правила раскрытия скобок)
( x y ) x y ,
x , y M , , :
( ) x x x .
Нетрудно убедиться непосредственной проверкой, что все эти аксиомы
выполняются для сигналов – как аналоговых, так и дискретных (вещественных и комплексных). Поэтому сигналы можно рассматривать как векторы
и называть векторами.
38
Коммутативная группа называется также а́белевой группой в честь Н.Х. Абеля (1802 – 1829), выдающегося норвежского математика
39
Полем в алгебре называется множество с определенными на нем двумя бинарными операциями (называемыми сложением и умножением), которое является коммутативной группой относительно обеих операций,
за исключением существования элемента, противоположного по умножению элементу, нейтральному по
сложению (запрещено деление на нуль). Кроме полей вещественных и комплексных чисел в теории связи
используются конечные поля Галуа́ (см. разд. 10).
49
В радиотехнике и связи часто используются комплексные сигналы, принимающие значения из поля комплексных чисел. Хотя все реальные электрические сигналы являются вещественными, иногда удобно пару сигналов
рассматривать как вещественную и мнимую составляющие комплексного
сигнала (в частности, при описании узкополосных сигналов полезным оказывается понятие комплексной огибающей). Далее, если явно не сказано обратное, всегда подразумевается, что сигналы комплексные; вещественные сигналы можно рассматривать, как комплексные с нулевой мнимой частью. Таким
образом, сигналы рассматриваются, как элементы комплексного пространства (компоненты векторов являются комплексными числами и складываются при сложении векторов, а также умножаются на комплексные скаляры по
правилам комплексной арифметики, см. Приложение 2).
Множество всех аналоговых сигналов, заданных на бесконечной временной оси, можно рассматривать, как линейное (векторное) пространство
(обозначим его L ). В самом деле, непосредственная проверка подтверждает
выполнение для этого множества всех аксиом линейного пространства.
Большой практический интерес представляет его подмножество, содержащее
все аналоговые сигналы ограниченной энергии, заданные на бесконечной
временной оси; это подмножество принято обозначать L2 ( , ) или просто
L2 . Легко убедиться, что это подмножество само по себе является линейным
пространством – подпространством пространства L . Иногда рассматривают
пространство L2 (T ) сигналов ограниченной энергии, определённых на заданном временнóм интервале конечной длительности T .
Важная роль в теории сигналов принадлежит пространству L2 ( F ) аналоговых сигналов конечной энергии с ограниченной полосой частот F .
Множество l2 всех дискретных сигналов ограниченной энергии, заданных на
всей дискретной временной оси n , , также является линейным пространством. Между двумя последними пространствами можно установить
50
взаимно однозначное соответствие40, что делает возможной цифровую обработку сигналов, изначально аналоговых, с последующим преобразованием
результата снова в форму аналогового колебания.
Принятие линейного пространства в качестве модели для множества
сигналов само по себе даёт немного. Для того чтобы эту модель применять с
пользой для дела, требуется наделить пространство структурой. Образно говоря, необходимо ввести систему координат и научиться измерять расстояния.
2.5. Структура линейного пространства
2.5.1. Базис линейного пространства
Поскольку определены операции сложения векторов и умножения вектора на скаляр, тем самым определена и линейная комбинация (взвешенная
сумма) конечной совокупности произвольных векторов xk , k 1, N :
N
y k xk ,
(2.11)
k 1
где k , k 1, N – произвольный набор скаляров (весовых коэффициентов)41.
В результате взвешенного суммирования получается некоторый вектор y .
Задавая при одной и той же совокупности векторов
xk , k 1, N
разные
наборы коэффициентов, можно получать различные суммарные векторы.
Если один вектор можно представить в виде линейной комбинации некоторого множества других векторов, он называется линейно зависимым от
них. Если такое представление невозможно, говорят о линейной независимости. Линейная независимость множества векторов означает, что никакой век40
Возможность и условия установления такого соответствия формулируются в виде теоремы отсчётов
(теоремы Котельникова), см. п. 2.10
41
Здесь и далее весовые коэффициенты будут, как правило, обозначаться греческими буквами; векторы, под
которыми понимаются функции, т.е. сигналы, будут обозначаться латинскими буквами, причем зависимость
от времени часто будет подразумеваться, например,
xk xk (t )
51
тор из данного множества нельзя представить линейной комбинацией
остальных. Например, в трёхмерном евклидовом пространстве линейно независимы любые три вектора, не лежащие в одной плоскости. И наоборот, если
три вектора, среди которых никакие два не совпадают по направлению (не
являются коллинеарными), лежат в одной плоскости, любой из них можно
представить взвешенной суммой (линейной комбинацией) двух оставшихся
векторов, подобрав соответствующие коэффициенты. Равносильное определение линейной независимости формулируется в следующем виде: совокуп-
ность векторов vk , k 1, N линейно независима, если равенство
N
k vk 0
k 1
возможно лишь при условии, что все коэффициенты равны нулю, т.е.
k 0 k 1, N .
Выбрав фиксированный набор векторов и задавая всевозможные коэффициенты, можно получить множество векторов, которые все будут линейными комбинациями этой фиксированной совокупности векторов. Множество всех таких линейных комбинаций называется линейной оболочкой данной совокупности векторов. Линейная оболочка совокупности линейно неза-
висимых векторов vk , k 1, N
представляет собой линейное пространство;
число N – размерность этого пространства42. Набор векторов vk , k 1, N в
этом случае представляет собой базис данного пространства. Таким образом,
любой вектор N -мерного пространства можно, и притом единственным образом, представить линейной комбинацией N векторов данного базиса. Иначе говоря, зная базис, для любого вектора можно найти набор N коэффициентов, и наоборот, зная эти N коэффициентов, можно восстановить данный
вектор как линейную комбинацию базисных векторов. Для любого простран-
42
В таких случаях говорят, что пространство натянуто на совокупность векторов
vk , k 1, N
52
ства базис можно задать множеством способов, и для решения конкретной
задачи можно выбрать наиболее удобный базис.
Пример 2.1. Множество S4 x1(t ) 1, x2 (t ) t , x3 (t ) t 2 , x4 (t ) t 3 , где
t 1,1 , линейно независимо, рис. 2.7. Следовательно, это множество функций может служить базисом четырёхмерного пространства – пространства
всех функций вида 1 2t 3t 2 4t 3 при t 1,1 , где коэффициенты
1, 2 , 3 , 4 принимают всевозможные комплексные значения. ◄ (Символ ◄ здесь и далее отмечает окончание примера).
Рис. 2.7. Линейно независимая совокупность функций
2
kn , k 0,7 функций цеПример 2.2. Множество Q8 xk [n] cos
16
лой переменной, определённых на участке дискретной временнóй оси n 0,7
, линейно независимо (в этом можно убедиться непосредственными вычислениями). Поэтому оно может служить базисом восьмимерного пространства,
7
например,
2
k cos 16 kn ,
k 0
пространства
всех
дискретных
n 0,7 , где k , k 0,7
сигналов
вида
– произвольный набор веще-
ственных чисел. ◄
53
Пространство L всех аналоговых сигналов бесконечномерно, поэтому
никакая конечная совокупность сигналов (функций) не может служить его
базисом, что достаточно очевидно. Менее очевидно то, что не всякая бесконечная совокупность линейно независимых функций может составить базис
пространства L . Бесконечная совокупность функций vk (t ), k 1,
может
быть базисом бесконечномерного пространства L , если её линейная оболоч
ка, т.е. множество всех линейных комбинаций вида
k vk (t )
при всевоз-
k 1
можных наборах весовых коэффициентов k , совпадает с пространством
L (такой базис называется полным). Тогда произвольный сигнал x(t ) из L
можно однозначно задать бесконечным набором коэффициентов разложения (весовых коэффициентов) относительно данного базиса (разумеется, для
конкретного сигнала может оказаться, что лишь конечное множество коэффициентов отлично от нуля). И наоборот, зная набор коэффициентов k (и,
конечно, базис), можно любой сигнал x(t ) точно восстановить согласно вы
ражению x(t ) k vk (t ) . Как правило, практический интерес представляют
k 1
только полные базисы, т.к. полнота базиса гарантирует возможность представления в этом базисе любого сигнала из данного пространства. Вопрос о
полноте базиса бесконечномерного пространства решается в общем случае
не просто, однако для базисов, обычно применяемых на практике, полнота
доказана (см., например, [5]).
Пространство всех дискретных сигналов, заданных при n , , также
бесконечномерно. Один из полных базисов этого пространства представляет
собой бесконечный набор -последовательностей при всевозможных цело-
численных сдвигах n k , k , , поэтому любой дискретный сигнал
можно представить выражением (2.10)
54
x[n]
k
x[k ] [n k ]
k [n k ] .
k
Пример 2.3. Множество всех двоичных векторов B8 bk , k 1,8 при
bk 0;1 содержит лишь конечное множество элементов (а именно 256). Тем
не менее, оно может рассматриваться, как линейное пространство, если сложение векторов определить через сложение их компонент по модулю43 2, а в
качестве поля скаляров принять так называемое поле Галуа́ GF (2) 0;1 , содержащее всего два числа – 0 и 1. Такие пространства играют принципиальную роль, например, в теории кодирования, которая составляет важнейшую
часть общей теории связи. В качестве базиса данного пространства можно
принять любые 8 линейно независимых ненулевых двоичных векторов. ◄
Пример 2.4. Передача речевых сигналов в системах мобильной связи 2
поколения выполняется на основе цифровых методов, включающих а) анализ
сигнала в передающей части системы, б) кодирование и передачу его признаков по цифровому радиоканалу и в) синтез речевого сигнала в приёмнике на
основе этих признаков. При синтезе сигнала в приёмной части сотового телефона стандарта D-AMPS так называемый сигнал возбуждения формируется как линейная комбинация векторов, хранящихся в устройстве памяти в виде двух «кодовых книг» [6]. Каждая из них представляет собой набор из 128
двоичных векторов (кодовых слов), состоящих из 40 компонент, и, следовательно, принадлежащих 40-мерному пространству. Однако фактически эти
векторы принадлежат 7-мерному подпространству, натянутому на семь 40мерных базисных векторов. Поэтому нужный для синтеза сигнала возбуждения 40-мерный вектор однозначно задаётся семью числами – координатами
относительно этого базиса. Таким образом, вместо передачи по каналу двух
43
Сложение по модулю целого числа q определяется так, что сумма q единиц равна нулю; при сложении по
модулю два выполняется равенство 1+1=0
55
40-битовых кодовых комбинаций в стандарте D-AMPS передаются две семибитовые комбинации, что существенно экономит ресурсы канала.◄
2.5.2. Метрика
На практике часто требуется количественно оценить степень сходства
или различия между сигналами. Такая необходимость возникает, например, в
цифровых системах связи при приёме сигналов в присутствии помех. По
форме наблюдаемого колебания демодулятор должен определить, какой
именно сигнал из заданного набора передавался на интервале наблюдения.
Говоря нестрого, демодулятор выбирает из множества возможных сигналов
тот сигнал, который в наибольшей степени похож на принятое колебание. В
условиях сильных помех наблюдаемые колебания могут мало напоминать
передаваемые сигналы; тем более важно иметь строго определённую, объективную характеристику сходства/различия сигналов.
Представление о сигналах как о векторах позволяет определить количественную меру различия между сигналами как расстояние между векторами.
Для этого вводится функционал44 d ( x, y ) , определяющий для каждой пары
векторов x и y некоторое неотрицательное число. Этот функционал называется метрикой, а пространство в результате становится метрическим.
Метрика должна удовлетворять следующим очевидным свойствам расстояния, формулируемым в виде аксиом (знак читается «только если»)
a) d ( x, y ) 0 и d ( x, y ) 0 x y (расстояние между различными векторами положительно);
b) d ( x, y ) d ( y, x) (расстояние симметрично),
c) d ( x, z ) d ( x, y ) d ( y, z ) (выполняется «неравенство треугольника»).
Отметим, что на одном и том же множестве сигналов можно задать различные метрики, при этом получаются разные метрические пространства.
44
Функционалом называется отображение, ставящее функции (или нескольким функциям) в соответствие
число
56
Например, на множестве L(T ) всех аналоговых сигналов, заданных на интервале [0, T ] можно определить следующие метрики:
T
1)
d1 ( x, y ) | x (t ) y (t ) | dt ,
0
1/2
T
2
2) d 2 ( x, y ) | x (t ) y (t ) | dt
0
,
3) d3 ( x, y ) max | x(t ) y (t ) | и т.п.
t[0,T ]
На множестве l всех дискретных сигналов, заданных для n , ,
можно ввести метрики
1) d4 ( x, y )
| x[n] y[n]| ,
n
1/2
2) d5 ( x, y ) | x[n] y[n] |2
n
,
3) d6 ( x, y ) max | x[n] y[n] | и т.д.
n ,
2.5.3. Норма
Интуитивным представлениям о «сильных» и «слабых» сигналах можно
придать строгий смысл, введя числовую характеристику сигнала, аналогичную длине вектора. Такой характеристикой служит норма. Функционал, исполняющий роль нормы вектора x и обозначаемый x , должен удовлетворять следующим очевидным условиям, формулируемым в виде аксиом
a). x 0 и x 0 x 0 ,
b). x y x y , (неравенство треугольника)
c). x | | x .
Норму, как и метрику, можно ввести различными способами. Для аналоговых сигналов чаще всего применяется норма
57
T
x
2
2
| x(t ) | dt
Ex ,
0
T
причём квадрат нормы E x | x (t ) |2 dt имеет смысл энергии сигнала. Находят
0
T
T
также применение нормы x 1 | x (t ) |dt и x
0
p
p
| x(t ) |
p
dt .
0
Аналогично вводится норма для дискретных сигналов. Наиболее часто
используются нормы x
2
2
| x[ n ] |
n
и x1
| x[n] | . Пространство с
n
заданной на нём нормой называется нормированным. Следует отметить, что,
как и в случае метрики, способ задания нормы влияет на свойства пространства и должен выбираться в соответствии с решаемой задачей.
Сравнивая аксиомы метрики и нормы, нетрудно заметить их сходство.
Поэтому, в частности, всегда можно (но не обязательно)45 метрику определить как норму разности векторов:
d ( x, y ) x y .
Например, в пространстве дискретных сигналов норме x 2 можно со1/2
поставить упомянутую выше метрику d5 ( x, y ) | x[n] y[n] |2
n
, кото-
рая обобщает на бесконечномерный случай евклидову метрику (расстояние
находится
«по
теореме
Пифагора»).
Аналогично,
метрика
1/2
T
d 2 ( x, y ) | x(t ) y (t ) |2 dt
0
является обобщением евклидовой метрики на
пространство континуальных сигналов.
45
В некоторых случаях целесообразно задать метрику и норму независимо друг от друга
58
2.5.4. Скалярное произведение
В большинстве практических задач, связанных с анализом и обработкой
сигналов, центральную роль играет двухместная операция, результат которой
называется скалярным произведением46. Ввести скалярное произведение
можно, определив для произвольной пары векторов из данного линейного
пространства число (скаляр) из соответствующего поля . Таким образом,
скалярное произведение представляет собой функционал. Скалярное произведение комплексных векторов x и y , обозначаемое ( x, y ) должно удовлетворять следующим условиям (аксиомам):
a) ( x, y) ( y, x)* ,
b) ( x y, z ) ( x, z ) ( y, z ) ,
c) ( x, x) 0 и ( x, x) 0 x 0 .
Здесь и – произвольные комплексные числа, знак * в условии а)
обозначает комплексное сопряжение величин. Условие b) означает линейность скалярного произведения относительно первого из операндов. Учитывая а) и b), можно записать
( x, y z) ( y z, x)* * ( y, x)* * ( z, x)* * ( x, y) * ( x, z ) .
Пространство со скалярным произведением называется унитарным (эрми́товым, предги́льбертовым). Из условия с) следует, что через скалярное
произведение можно задать норму, определяемую выражением
x ( x, x) .
Далее можно определить метрику как норму разности векторов. Если
полученное таким образом пространство полно (то есть вместе с любой сходящейся последовательностью векторов содержит предел этой последовательности [5]), то оно называется гильбертовым пространством47. Отметим,
что в конечномерном случае гильбертово пространство является евклидовым.
46
47
Иногда скалярное произведение называют внутренним произведением
Названо в честь Давида Гильберта (David Hilbert, 1862 – 1943) – выдающегося немецкого математика
59
Таким образом, гильбертово пространство –это обобщение евклидова пространства на бесконечномерный случай. Наиболее часто в теории сигналов
используются именно гильбертовы пространства.
Пример 2.5. Множество аналоговых сигналов ограниченной энергии, за-
данных на конечном интервале [0, T ] , становится гильбертовым пространством, если определить скалярное произведение выражением
T
( x, y ) x (t ) y* (t )dt ,
0
а норму и метрику, соответственно, выражениями
T
x
2
2
| x(t ) | dt
T
и d ( x, y )
0
2
| x(t ) y(t ) | dt .
0
Это пространство принято обозначать L2 (T ) . Если носитель сигнала –
вся вещественная (временная) ось, то пространство сигналов ограниченной
энергии обозначается L2 ( , ) или просто L2 . Разумеется, тогда интегрирование при вычислении функционалов производится в бесконечных пределах.◄
Пример 2.6. Множество дискретных сигналов (последовательностей)
бесконечной протяжённости становится гильбертовым пространством, если
определить скалярное произведение выражением
( x, y )
x[n] y*[n]
n
и ввести норму и метрику выражениями
x
2
n
| x[ n ] |2 и d ( x, y )
| x[ n] y[ n] |2 .
n
60
Пространство, содержащее все последовательности конечной нормы
x 2 , обозначается l2 и называется пространством квадратично суммируемых
последовательностей. ◄
Пример 2.7. В некоторых задачах теории сигналов и цепей рассматри-
ваются нормированные пространства L1 (T ) и l1 аналоговых и дискретных
сигналов с нормами, определяемыми соответственно выражениями
T
x 1 | x (t ) |dt и x 1
0
| x[n] | .
n
Эти пространства не являются гильбертовыми. ◄
2.6. Гильбертово пространство
2.6.1. Неравенство Шварца. Ортогональность
Введение такой характеристики, как норма, позволяет сравнивать сигналы между собой, т.е. определять, какой из сигналов «больше», «сильнее».
Метрика даёт возможность судить о различии сигналов – если расстояние
между сигналами велико, то они сильно отличаются друг от друга. Дополнительная возможность сравнения сигналов возникает при введении скалярного
произведения. Этим и определяется важная роль гильбертовых пространств,
как моделей для пространств сигналов.
Для унитарного пространства [7] справедливо неравенство Шварца48
| ( x, y) |2 ( x, x)( y, y) , которое можно переписать в виде
| ( x, y ) |
1 . Смысл
x2 y2
этого неравенства заключается в том, что в гильбертовом пространстве, как и
в евклидовом, скалярное произведение двух сигналов не может превзойти по
модулю произведения их норм. Для евклидова векторного пространства известна формула скалярного произведения
( a, b) a b cos ,
48
Это неравенство также называют неравенством Коши–Шварца или неравенством Коши–Буняковского.
Доказательство см. в Приложении 3.
61
где обозначает модуль вектора, – угол между векторами. По аналогии
можно определить угол между сигналами выражением cos
( x, y )
.
x2 y2
Рассмотрим три частных случая. В первом случае ( x, y) x 2 y 2 , тогда
cos 1 , а =0. Векторы коллинеарны и различаются только длиной; это
означает, что сигналы x и y имеют одинаковую форму и могут отличаться
только нормой (т.е. один из сигналов равен другому сигналу, умноженному
на положительный коэффициент). Второму случаю соответствует равенство
( x, y) x
2
y 2 , при этом cos 1 , . Векторы имеют противопо-
ложные направления, сигналы имеют одинаковую форму, различаются знаком и, возможно, нормой (т.е. один из сигналов равен другому сигналу,
умноженному на отрицательный коэффициент). Большой практический интерес представляет третий частный случай, когда для ненулевых сигналов x
и y скалярное произведение ( x, y ) 0 , тогда сигналы называются ортогональными ( cos 0 , а 90 ). Можно сказать, что первый и второй случаи
соответствуют максимальному сходству сигналов, тогда ортогональность
означает их максимальное несходство.
Пример 2.8. Приёмное устройство системы связи с ортогональными
сигналами, структура которого иллюстрируется рисунком 2.8, содержит m
каналов, каждый из которых «настроен» на приём одного сигнала, причём
все m используемых в данной системе сигналов взаимно ортогональны.
Устройство должно определить, какой именно из m возможных сигналов
присутствует на входе. Для этого формируются (генерируются) m опорных
колебаний, каждое из которых совпадает с одним из ожидаемых сигналов
(время начала сигнала предполагается известным). В каждом канале вычисляется скалярное произведение принимаемого колебания s (t ) и одного из
опорных колебаний uk (t ), k 1, m . Предположим, что принимаемое колебание
62
совпадает по форме с одним из опорных сигналов, но может отличаться по
норме (например, вследствие затухания в канале связи). Пусть, например,
принимаемое колебание совпадает по форме с опорным сигналом un (t ) , тогда на всех выходах схемы, кроме n -го, по окончании интервала наблюдения
T будет нулевое значение (сигнал un (t ) ортогонален всем остальным опорным сигналам), а на n -м выходе – произведение норм принимаемого и опорного колебаний, заметно отличное от нуля. Таким образом, измеряя напряжения на выходах схемы, можно определить, какой из m ортогональных
сигналов присутствует на входе. В реальной системе связи входное колебание всегда содержит смесь (сумму, произведение или продукт более сложного взаимодействия) сигнала с шумом и/или помехой, поэтому скалярные
произведения на выходах схемы отличаются от указанных точных значений;
в этом случае ортогональность сигналов гарантирует высокую помехоустойчивость системы (подробнее см. разд. 12) ◄
Рис. 2.8. Структура приёмника системы связи с ортогональными сигналами
Таким образом, скалярное произведение оказывается полезным как количественная характеристика сходства сигналов. Кроме того, скалярное про-
63
изведение позволяет найти представление сигнала относительно заданного
базиса.
Наличие полного базиса в некотором пространстве означает по определению, что любой вектор данного пространства можно представить в виде
линейной комбинации базисных векторов с определённым набором коэффициентов, но возникает вопрос: как отыскать эти коэффициенты для конкретного вектора?
Пусть vk , k 1, N – базис пространства, в котором определено скаляр-
ное произведение. Тогда можно построить другой базис wk , k 1, N , называемый сопряжённым, или взаимным, такой, что при любых k и m справед1, k m
ливо выражение vk , wm km , где km
– символ Кро́некера49. Это
0, k m
означает, что каждый вектор сопряжённого базиса ортогонален всем векторам первого базиса, кроме одного, с которым он имеет скалярное произведение, равное 1. Сопряжённый базис представляет собой вспомогательное
средство для разложения векторов в основном базисе.
Пусть необходимо вектор x представить в виде линейной комбинации
N
базисных векторов x k vk . Тогда коэффициент m можно найти, как
k 1
скалярное произведение заданного вектора x и вектора wm из сопряжённого
базиса. В самом деле,
N
N
N
x
,
w
v
,
w
(
v
,
w
)
m k k m k k m k km m .
k 1
k 1
k 1
2.6.2. Ортонормальные базисы
Особенно просто находятся коэффициенты разложения для произвольного вектора, если заданный базис пространства состоит из взаимно ортого49
Не следует путать символ Кронекера с
-последовательностью и с -функцией
64
нальных векторов, нормы которых равны 1. Такой базис называется ортонормированным или ортонормальным. Нетрудно убедиться, что ортонор-
мальный базис uk , k 1, N
является взаимным самому себе, или самосо-
пряжённым, так как для него выполняется условие uk , um km . Поэтому
коэффициенты разложения для произвольного вектора находятся его скалярным умножением на сами базисные векторы:
N
N
N
x, um k uk , um k (uk , um ) k km m .
k 1
k 1
k 1
Итак, для ортонормального базиса коэффициенты разложения произвольного вектора определяются наиболее просто:
k x, uk , k 1, K .
Пример 2.9. В пространстве комплексных сигналов конечной длитель-
ности
T,
заданных
на
T / 2,T / 2
интервале
базис
2
j kt
T
, k , является ортогональным. В самом деле, для двух
vk (t ) e
произвольно выбранных функций из этого базиса скалярное произведение
равно
T /2
(vn , vm )
T /2
vn (t )vm* (t )dt
T /2
T /2
e
j
2
( n m )t
T
dt
0, n m
T m, n
.
T , n m
Нормируя базисные функции путем умножения их на 1 / T , можно по2
1 j T kt
лучить ортонормальный базис uk (t )
, k , , для которого
e
T
справедливо равенство (un , um ) m, n . Коэффициенты разложения сигнала в
данном базисе находятся, как скалярные произведения
65
1
k ( x , uk )
T
T /2
x(t )e
j
2
kt
T dt
k , ,
(2.12)
T /2
так что любой сигнал, заданный на конечном интервале T / 2, T / 2 , можно
представить рядом Фурье50 по ортонормальным функциям
x (t )
k
k u k (t )
k
k
1 j
e
T
2
kt
T .
(2.13)
Совокупность коэффициентов k , k , , называется спектром сигнала
относительно заданного базиса.
Чаще на практике используется разложение относительно первого – ортогонального ненормированного – базиса
x (t )
k
Ck e
j
2
kt
T
(2.14)
также называемое рядом Фурье, со спектральными коэффициентами
k
T /2
2
j
1
T
(
)
Ck
x
t
e
T T T /2
kt
dt
k , .
(2.15)
Оба базиса полны в пространстве L2 ( T / 2, T / 2) . Следует, однако, отметить, что, например, в L2 ( , ) они не полны (напомним, что базис
называется полным, если любой вектор данного пространства можно представить линейной комбинацией базисных векторов).◄
Далее будет показано, что для любого унитарного пространства (пространства со скалярным произведением) можно построить множество51 ортонормальных базисов.
50
Жан Бати́ст Жозе́ф Фурье́ (1768 – 1830) – выдающийся французский математик, один из основоположников математической физики.
51
Даже в двумерном пространстве (на плоскости) можно задать бесконечно много различных ортонормальных базисов; тем более это справедливо для многомерных пространств сигналов.
66
2.6.3. Обобщённый ряд Фурье
Представление сигнала (вектора) относительно произвольного полного
ортонормального базиса
uk , k , , ,
(uk , um ) m, k , называется обоб-
щённым рядом Фурье (ОРФ):
k uk .
x
(2.16)
k
Ортонормальные базисы обладают, помимо простоты нахождения спектральных коэффициентов, и другим замечательным свойством: зная коэффициенты разложения сигналов относительно такого базиса, легко найти их
нормы и скалярные произведения.
Действительно, пусть вектор (сигнал) x представлен рядом (2.16). Его
энергия (квадрат нормы)
x
2
2
*
x, x k uk , mum k m
uk , um
m
k
k m
k m
*
k m
km
2
m
m .
(2.17)
Таким образом, доказано равенство Парсеваля52. В пространствах L2 и
l2 равенство Парсеваля для сигналов, заданных спектрами m , m , и
m , m ,
относительно полных ортонормальных базисов этих про-
странств, принимает соответственно вид
2
| x(t ) |
52
dt
m
m
2
и
n
2
x[n]
m
2
m .
Марк-Антуан Парсеваль (1755–1836) — французский математик
67
Пусть два вектора представлены в некотором общем для них полном ортонормальном базисе выражениями x
k
k uk и y
k
k uk . Тогда их
скалярное произведение
*
*
( x, y ) k uk , mum k m km m m
.(2.18)
m
m
k
k m
Это выражение носит название обобщённой формулы Рэлея53. Нетрудно
видеть, что равенство Парсеваля получается из обобщённой формулы Рэлея
как частный случай при y x . Значение этих равенств состоит в следующем:
при решении задач, связанных с сигналами, в качестве описаний сигналов
всегда можно использовать их спектры относительно полных ортонормальных базисов, т.к. взаимное расположение векторов определяется углами
между ними, которые выражаются через нормы и попарные скалярные произведения; при этом конкретный вид базиса не имеет значения, если базис
ортонормальный и полный.
2.6.4. Усечённый ОРФ. Неравенство Бесселя
Обобщённый ряд Фурье, представляющий произвольный сигнал из бесконечномерного пространства L , содержит в общем случае бесконечно много слагаемых (в частных случаях, разумеется, некоторые коэффициенты или
даже все они, могут быть равны нулю). Практически можно вычислить лишь
конечное число коэффициентов разложения сигнала, поэтому приходится
ограничивать рассмотрение усечённым рядом, то есть его частичной суммой
x , которая аппроксимирует данный сигнал x :
K
x x k uk .
k 1
53
Джон Уильям Стретт, лорд Рэлей (1842–1919) – знаменитый английский физик, известный трудами в области теории колебаний и др.
68
Понятно, что точность аппроксимации зависит от количества K удерживаемых слагаемых. Возникает вопрос, какое количество K достаточно для
представления сигнала с заданной точностью.
Усеченный ОРФ – это представление сигнала в виде линейной комбина
ции конечного количества K базисных векторов, поэтому x принадлежит K
-мерному пространству LK – подпространству пространства L , натянутому
на данный базис. Поскольку все базисные векторы взаимно ортогональны,
ошибка аппроксимации x x , которая равна сумме всех отброшенных
слагаемых обобщённого ряда Фурье, ортогональна по отношению к LK и
принадлежит его ортогональному дополнению L , такому, что L LK L ,
(см. рис.2.9). Символ обозначает прямую сумму пространств (например,
трёхмерное евклидово пространство можно представить прямой суммой некоторой плоскости и прямой, ортогональной этой плоскости). Поскольку
векторы x , x и имеют взаимное расположение в виде прямоугольного
треугольника, то согласно теореме Пифагора
2
2
xx
2
2
x
2
2
K
2
k 1
2
k uk
x
2
2
K
| k |2 0
k 1
(т.к. ясно, что норма любого вектора не может быть отрицательной), откуда
следует неравенство Бе́сселя54
K
| k |2
k 1
2
x 2.
(2.19)
Оно означает, что при аппроксимации сигнала x частичной суммой x обоб
щённого ряда Фурье энергия аппроксимирующего сигнала x не может превзойти энергию аппроксимируемого сигнала x . Равенство возможно только в
том случае, если сам сигнал x принадлежит подпространству LK .
54
Фридрих Вильгельм Бессель (1784–1846) — немецкий математик и астроном
69
Рис. 2.9. К поонятию кон
нечномерноой аппрооксимации сигнала ( x и приннадлежат пространсттву L )
Рис. 2.10. Прямоугол
П
льный видеоимпульс
С увелич
чением размерноссти подпр
ространств
ва LK , тоо есть с уввеличением
числла слагаеемых, вхо
одящих в частичн
ную сумм
му обобщ
щённого ряда
р
Фурьье,
норм
ма ошибкки стремится к нулю (в этом и состоит
с
ппрактический смы
ысл
треб
бования полноты
п
базиса:
б
заадав допу
устимую норму ош
шибки, можно под
добратть число K слагаеемых, таккое, что норма
н
ошибки буддет не бол
льше задаанной)). Таким образом,, располаагая полным ортон
нормальнным базиссом, мож
жно
обесспечить сколь
с
угодно точнную аппроксимаци
ию сигналла взвеш
шенной сууммой
й конечноого числа наперёд заданных
х функци
ий с соотвветствующ
щими вессовым
ми коэффи
ициентам
ми; при эттом гаранттируется,, что при заданном
м числе сллагаем
мых норм
ма ошибк
ки аппрокксимации
и будет минимальн
м
ной. В пределе
п
п
при
неогграниченн
ном ростее K нераавенство Бесселя
Б
переходит
п
т в равенсство Парссеваляя.
р 2.10. Пр
рямоуголььный вид
деоимпулььс длителльности и и ампллиПример
туды
ы A , изоображённы
ый на ри
ис. 2.10, на
н интерв
вале (T / 2, T / 2) при T и
мож
жно предсставить ряядом (2.133) с коэфф
фициентаами
/2
2
j
1 и
T
k
Ae
e
T /2
и
kt
dtt
A и siin k и / T
, k , .
k и / T
T
70
Диаграм
мма, отоб
бражающая спектр
р прямоу
угольногоо импулььса относсителььно ортон
нормального базисса Фурье, приведеена на риис. 2.11 (к
каждый кок
эфф
фициент показан
п
вертикаль
в
ьным отр
резком со
оответствуующей длины).
д
А
Аппрокксимации
и прямоугольного импульсса, получ
ченные каак конечн
ные сумм
мы
x (t )
N
k N
k
1 j
e
T
2
kt
T
при N 5 , N 10 , и N 20 пооказаны различным
р
ми
лини
иями на рис.
р 2.12. ◄
Рис.2.11. Спектралььная диагррамма
прямоуголльного имп
пульса, задаанного
на конеч
чном времен
ннóм интеррвале
Ри
ис. 2.12. Апппроксимаации
пр
рямоугольнного импул
льса
части
ичными сум
ммами рядаа Фурье
Пример
р 2.11. Фуункции Уо́ лша сосставляют ортонорм
мальный полный баб
зис простран
нства L2 ( 1 / 2,1 / 2) . При практическом пррименени
ии функций
Уоллша55 инттервал зад
дания си
игнала (об
бласть оп
пределениия функц
ции) мож
жет
T , но в опи
иметь произввольную длину
д
исании фу
ункций Уоолша вреемя приняято
норм
мироватьь к дли
ине интеервала согласно
с
выраженнию t / T , где
г
t T / 2, T / 2 . Граф
фики четы
ырёх перввых функ
кций Уолш
ша показааны на ри
ис.
2.133,a. Функц
ции Уолш
ша привллекли вни
имание бл
лагодаря ппростоте их генеррироваания при помощи переключ
п
чательных
х (ключев
вых) схем
м.
и Уолша можно оопределитть с помо
ощью реккуррентно
ого соотн
ноФункции
шен
ния, в котоором n / 2 обозн
начает цел
лую частьь числа n / 2 :
55
Фун
нкции Уолшаа (J. Walsh) применяются,
п
, в частности
и, в системах сотовой связзи стандартовв CDMA и
UMTS
71
1, 1 2 , 1 2 ,
wal 0,
0 в противном случае,
wal 2n p, (1)
n /2 p
wal n,2 12 (1)n p wal n,2 12 ,
n 0,1,2,... ., p 0,1.
Иногда удобнее функции Уолша задавать на интервале (0,1) нормированного времени t / T (рис. 2.13,б). Система таких функций представляет
собой полный ортонормальный базис пространства L2 (0,1) ; при этом функции Уолша определяются рекуррентными соотношениями
Wal 2n p, Wal n,2 (1) n p Wal n, 2 1
0,1 ,
1,
n 0,1,2,... ., p 0,1; Wal 0,
0 в противном случае.
Известны и другие способы определения функций Уолша (через функции Радемахера, через матрицы Адамара; при этом получаемые системы
функций могут различаться нумерацией).
Для практического представления функциями Уолша сигнала, заданного
на интервале длительности T реальной временной оси, необходимо выполнить подстановку t / T . Получаемые при этом функции времени t остаются взаимно ортогональными, однако их нормы изменяются, т.е. получаемый базис ортогонален, но не ортонормален. Выясним, как следует определять спектральные коэффициенты относительно этого базиса.
Рассмотрим базис Уолша пространства L2 (0,1) (для базиса Уолша пространства L2 ( 1 / 2,1 / 2) все рассуждения также будут справедливы). Поскольку базис Уолша ортонормирован, то
1
2
Wal k , d 1 .
0
72
После подстановки t / T
T
имеем
2
t
t
Wal k , T d T 1 , откуда
0
2
T
t
Wal k , T dt T . Следовательно, нормы функций Уолша после растяже0
ния в T
раз по временной оси увеличиваются в
T
раз. Базис
1
t
Wal k , , k 0, , очевидно, ортонормален, и для сигнала x(t ) , за
T
T
данного на интервале (0, 1) справедливо представление обобщенным рядом
Фурье
k
x(t )
k 0
1
Wal k , t / T
T
с коэффициентами
T
k x (t )
0
1
t
Wal k , dt .
T
T
Введя обозначение
Ck k
1
T
получим представление сигнала относительно ненормированного базиса
x(t )
CkWal k , t / T
k 0
с коэффициентами
T
1
t
Ck x (t )Wal k ,
T
T
0
dt . ◄
73
а
б
Рис. 2.13. Функции Уолша
Разложение сигналов в различных ортонормальных или ортогональных
базисах (спектральное представление) применяется на практике в тех случаях, когда оперировать спектром сигнала удобнее, чем его временнóй функцией. Наиболее ярким примером служит спектральный метод анализа линейных
стационарных цепей (см. п. 2.8.4–2.8.5). Устройство, вычисляющее спектральные коэффициенты сигнала, называется анализатором спектра, рис.
2.14. Зная спектральные коэффициенты и базисные функции, можно восстановить сигнал, то есть выполнить его синтез согласно рис. 2.15. Разложение
сигналов относительно неортогонального базиса также возможно, но оно
значительно сложнее и его результаты труднее интерпретировать.
2.6.5. Процедура Грама–Шмидта
После знакомства с преимуществами ортогональных и особенно ортонормальных базисов может (и должен) возникнуть вопрос о том, как найти
(построить) такой базис в интересующем нас пространстве сигналов.
74
Существует алгоритм, называемый процедурой Грама–Шмидта56, позволяющий по имеющемуся набору линейно независимых функций (векторов)
построить ортонормальный базис.
Пусть vk , k 1, – совокупность линейно независимых векторов (исходный базис), на основе которой требуется построить ортонормальный ба-
зис. Введём обозначение uk , k 1, для будущего ортонормального базиса.
Базис строится последовательно, шаг за шагом, при этом на каждом шаге нам
потребуется вспомогательный вектор. Совокупность вспомогательных век-
торов обозначим wk , k 1, . Процедура Грама–Шмидта представляет собой последовательность шагов:
1) первый вспомогательный вектор w1 приравнивается первому вектору
v1 исходного базиса w1 v1 ; первый вектор результирующего орто-
нормального базиса получается нормировкой
u1
1
w1
w1 ;
2
2) второй вспомогательный вектор w2 получается вычитанием из второго вектора исходного базиса v2 его проекции на уже построенный
вектор u1 ортонормального базиса, после чего производится нормировка w2 и получается второй вектор ортонормального базиса
w2 v2 (v2 , u1 )u1 ,
u2
1
w2
w2 ;
2
3) третий вспомогательный вектор w3 формируется путем вычитания из
очередного вектора исходной совокупности v3 его проекций на уже
56
Йорген Грам (1850 – 1916) – датский математик, известен исследованиями в области математической статистики, теории чисел, теории приближения функций рядами; Эрхард Шмидт (1876 – 1959) – немецкий математик, известен результатами исследований в области интегральных уравнений и функционального анализа
75
построенные векторы u1 и u2 ортонормального базиса, после чего
этот вектор нормируется
w3 v3 (v3 , u1 )u1 (v3 , u2 )u2 ,
Рис. 2.14. Структура анализатора спектра
u3
1
w3
w3 и т.д.
2
Рис. 2.15. Синтез сигнала по его спектру
Продолжая процедуру Грама–Шмидта, можно построить ортонормальный базис любой размерности (конечно, не выше размерности пространства,
которому принадлежат исходные векторы).
Требование линейной независимости исходной совокупности векторов
vk , k 1,
при практической реализации процедуры Грамма–Шмидта не
является обязательным. Если в процессе построения базиса очередной вектор
vm окажется линейно зависимым по отношению к уже использованным век-
торам v1,..., vm 1 , то вектор wm окажется нулевым, тогда вектор vm следует
отбросить и использовать следующий вектор исходной совокупности.
Пример 2.12. Множество S4 v0 (t ) 1, v1(t ) t , v2 (t ) t 2 , v3 (t ) t 3 , где
t 1,1 , линейно независимо (см. пример 2.1). В результате применения
процедуры Грама–Шмидта получается ортонормальный базис, состоящий из
76
четырёх функций, показанных на рис. 2.16. Это известные полиномы Лежандра, нормированные к единице по норме пространства L2 ( 1,1) . ◄
Рис. 2.16. Базис, полученный применением процедуры Грама – Шмидта
к совокупности степенных функций, показанной на рис. 2.7.
Итак, в пространствах аналоговых и дискретных сигналов можно построить бесконечно много ортонормальных базисов. Выбор наиболее подходящего базиса определяется конкретной решаемой задачей.
2.7. Непрерывные представления сигналов
2.7.1. Базисы и базисные ядра
Обобщенный ряд Фурье представляет сигнал в виде взвешенной суммы
(линейной комбинации) счётного57 множества базисных функций. Иногда
счётный базис неудобен (или просто непригоден) для представления сигнала.
Например, счётный базис Фурье, полный в L2 (T ) , не полон в L2 ( , ) и поэтому непригоден для представления сигналов бесконечной длительности. В
самом деле, пространство L2 ( , ) содержит все функции конечной нормы
(все сигналы конечной энергии), в том числе сигналы бесконечной длительности, достаточно быстро убывающие при t и при t . Поэтому при
любом заранее заданном конечном интервале длины T нельзя гарантировать
сколь угодно точного представления рядом Фурье всех таких сигналов.
57
Напомним, что счётным называется множество, элементы которого могут быть пронумерованы, т.е. поставлены в соответствие элементам множества целых неотрицательных чисел
77
С другой стороны, пользуясь процедурой Грама–Шмидта, в L2 ( , )
можно построить полный ортонормальный базис (на самом деле – сколько
угодно таких базисов), если в качестве исходной принять систему функций,
принадлежащих L2 ( , ) , т.е. бесконечно протяжённых и достаточно быстро убывающих на бесконечности. В частности, применяя процедуру Грама–
Шмидта к совокупности функций x ne x
2
/2
, n 0,1,2,... , получим ортонор-
мальный базис функций Эрми́та58, полный в L2 ( , ) [5].
Однако этот базис, как и другие полные счётные базисы пространства
L2 ( , ) , не обладает теми привлекательными свойствами, которые обусло-
вили чрезвычайно широкое применение базиса Фурье в теории и практике и
о которых далее будет сказано подробно (см. п. 2.8.5).
Гармонические функции, аналогичные функциям базиса Фурье, могут
применяться для представления сигналов из L2 ( , ) , но для этого мощность59 их множества должна быть больше мощности счётного множества
(иначе говоря, множество базисных функций должно быть непрерывным).
Фактически это означает, что номер базисной функции должен стать непрерывной величиной и превратиться во второй непрерывный аргумент. Базис
как счётное множество функций одной переменной (времени) заменяется одной функцией двух переменных – базисным ядром.
Представление сигнала в виде обобщённого ряда Фурье – суммы счётного множества базисных функций, умноженных на спектральные коэффициенты – заменяется интегралом от функции двух переменных (ядра), умноженной на функцию одной непрерывной переменной, называемую спектральной плотностью.
58
Шарль Эрми́т (1822–1901) – выдающийся французский математик
Мощность множества (кардинальное число) – обобщение понятия «количество элементов» на бесконечные множества (см. Приложение 1)
59
78
Ниже приведены попарно термины и формулы, соответствующие дискретному и непрерывному (интегральному) представлениям аналоговых сигналов.
Интегральное представление
vk (t ), k , – базис (необязательно v( s, t ) – базисное ядро интегрального
представления
ортогональный)
( s ) – спектральная плотность сигнала
k , k , – спектр сигнала отноотносительно выбранного ядра
сительно выбранного базиса
Дискретное представление
x(t )
k vk (t ) – дискретное пред-
k
ставление сигнала
k x, wk
(s)v(s, t )ds – интегральное
x(t )
представление сигнала
x(t ) wk* (t )dt – форму-
ла нахождения спектрального коэффициента с использованием сопряжённого
( s)
vk , wm km – условие взаимности (со-
и wk (t ), k ,
x(t ) w* ( s, t )dt –
(2.20)
w( s, t )
формула нахождения спектральной плотности с использование сопряжённого ядра
(взаимного) базиса wk (t ), k ,
пряжённости) базисов vk (t ), k ,
*
v(s, t )w ( , t )dt (s )
*
v(s, t )w (s, )ds (t ) –
(2.21)
условия сопряжённости ядер v ( s, t ) и
uk , um km – условие ортонормальности (самосопряжённости) базиса
uk (t ), k ,
w( s, t )
u(s, t )u
*
( , t )dt ( s ) и
u (s, t )u
*
( s, )ds (t ) – условия
самосопряжённости базисного ядра
u ( s, t )
x(t )
k uk (t ) – обобщённый ряд
k
Фурье (представление сигнала в ортонор-
мальном базисе) uk (t ), k ,
x(t )
(s)u (s, t )ds – интегральное
представление сигнала относительно самосопряжённого базисного ядра u ( s , t ) .
79
k x, u k
x(t )uk* (t )dt – формула
нахождения спектрального коэффициента
относительно ортонормального базиса
(s)
x(t )u* ( s, t )dt – формула
нахождения спектральной плотности относительно самосопряжённого ядра
u ( s, t ) .
Таким образом, интегральное представление имеет много общего с
обобщённым рядом Фурье.
2.7.2. Примеры базисных ядер
Как и базис для дискретного представления сигналов, базисное ядро
можно задать бесконечным числом способов, но самое широкое применение
в радиотехнике и связи нашли ядра, рассматриваемые ниже в качестве примеров.
Пример 2.13. Для представления сигналов из пространства L2 ( , )
очень часто используется базисное ядро u( f , t ) e j 2 ft (вместо переменной s
в обозначении ядра использовано общеупотребительное обозначение частоты буквой f ). Ядро является самосопряжённым, так как
u( f , t )u
T
lim
T
T
*
( , t )dt
e
j 2 ft j 2 t
e
dt
e j 2 ( f )t dt lim 2T
T
sin 2 ( f )T
( f )
2 ( f )T
(доказательство второго условия самосопряжённости предлагается в качестве
упражнения).
Ввиду особой роли рассматриваемого представления условимся в дальнейшем всюду спектральную плотность сигнала относительно ядра e j 2 ft
обозначать той же буквой, что и сигнальная функция, но заглавной. Спектральная плотность сигнала x(t ) относительно данного ядра определяется
выражением
80
X(f )
x(t )e j 2 ft dt ,
(2.22)
известным как (прямое) преобразование Фурье, а формула интегрального
представления сигнала
x(t )
X ( f )e j 2 ft df
(2.23)
называется обратным преобразованием Фурье. ◄
Сравнение выражения обратного преобразования Фурье с рядом Фурье
выявляет их глубокое сходство: интеграл соответствует сумме, спектральная
плотность – совокупности спектральных коэффициентов (спектру). Часто для
краткости спектральную плотность называют спектром, но нельзя забывать,
что спектр – это набор чисел (спектральных коэффициентов), а спектральная
плотность – функция непрерывной переменной. Кроме того, при учёте физической размерности спектральных представлений сигнала спектр и спектральная плотность имеют разную размерность (если считать базисные
функции и ядро безразмерными, то при представлении сигнала в форме
напряжения коэффициенты ряда Фурье должны выражаться в вольтах, а
спектральная плотность должна иметь размерность Вольт/Герц).
Можно обратное преобразование Фурье считать (нестрого) результатом
предельного перехода для ряда Фурье при T . Тогда выражение (2.23)
представляет собой взвешенную сумму «сплошного множества» базисных
функций времени e j 2 ft при всевозможных фиксированных значениях частоты f . Стоит отметить, что сами эти «базисные функции» пространству
L2 ( , ) не принадлежат, т.к. имеют бесконечную энергию.
Пример 2.14. Прямоугольный импульс длительности и и амплитуды A
, изображённый на рис. 2.10, если его рассматривать на бесконечной временной оси, не может быть представлен рядом Фурье, однако результат преобра-
81
зования Фурье для него (фурье-образ) легко найти. Спектральная плотность
такого импульса
X(f )
x(t )e
j 2 ft
dt A
и /2
e j 2 ft dt A и
и /2
sin( f и )
fи
(2.24)
показана на рис. 2.17. Необходимо иметь в виду, что в общем случае спектральная плотность является комплексной функцией. ◄
Рис. 2.17. Спектральная плотность чётного прямоугольного видеоимпульса
Запишем скалярное произведение двух сигналов x(t ) и y (t ) , выразив
сигналы через их спектральные плотности при помощи обратного преобразования Фурье:
( x, y )
*
x(t ) y (t )dt
X ( )e
d
*
X ( )Y ( f )
j 2 t
e
j 2 ( f )t
Y
*
( f )e j 2 ft df dt
dtdfd
X ( )Y * ( f ) ( f )dfd
X ( f )Y * ( f )df .
Таким образом, получена обобщённая формула Рэлея
*
x(t ) y (t )dt
X ( f )Y * ( f )df
(2.25)
82
для интегрального представления сигналов относительно базисного ядра
Фурье e j 2 ft . Аналогичное выражение будет справедливо для интегрального
представления сигналов относительно любого самосопряжённого ядра.
Подставляя в (2.25) y (t ) x(t ) , получаем равенство Парсеваля
2
| x(t ) |
dt
2
| X( f )|
df .
(2.26)
Симметричная форма левых и правых частей выражений (2.25) и (2.26)
должна наводить на мысль, что «естественное» временнóе представление
сигнала можно понимать как представление относительно некоторого самосопряжённого ядра. Справедливость такого утверждения подтверждается
следующим примером.
Пример 2.15. Для пространства сигналов L2 ( , ) примем в качестве
базисного ядра -функцию u (t , ) (t ) (вместо переменной s использовано традиционное обозначение задержки буквой ). Это ядро является самосопряжённым. Поэтому спектральная плотность сигнала x(t ) относительно данного ядра определяется выражением
x( )
x(t ) (t )dt ,
(2.27)
а формула интегрального представления сигнала
x(t )
x( ) (t )d .
(2.28)
Полученное выражение, описывающее стробирующее свойство функции и совпадающее с динамическим представлением сигнала (2.5), демонстрирует тот факт, что обычное временнóе представление сигнала можно
рассматривать, как интегральное (спектральное) представление относительно
базисного ядра u (t , ) (t ) со спектральной плотностью x( ) . Иными
83
словами, временная функция x () , описывающая сигнал, формально есть не
что иное, как спектральная плотность. Таким образом, с формальной точки
зрения временно́е представление сигнала является не более (и не менее)
естественным, чем частотное представление (2.22) или любое другое представление относительно самосопряжённого базисного ядра. ◄
Пример 2.16. Очень важную роль в теории сигналов играет представле-
ние относительно ядра вида u (t , )
1
(вместо переменной s исполь ( t )
зована переменная , имеющая смысл времени). Это ядро является самосопряжённым. Поэтому спектральная плотность сигнала x(t ) относительно
данного ядра определяется выражением
xˆ ( )
1
x(t )
dt ,
t
(2.29)
а формула интегрального представления сигнала
x(t )
1
xˆ ( )
d .
t
(2.30)
Полученные выражения представляют собой пару преобразований Гильберта
(прямое и обратное) и составляют, в частности, математический фундамент
для описания узкополосных детерминированных и случайных колебаний
(подробнее см. п. 2.11). ◄
Пример 2.17. Для спектрального представления дискретных сигналов из
пространства l2 используется ядро u( f , n) e j 2 fn , зависящее от непрерывной переменной f , имеющей смысл частоты, и от дискретной временно́й переменной n . Спектральная плотность дискретного сигнала x[n] относительно данного ядра определяется выражением
84
X( f )
x[n]e j 2 fn ,
0.5 f 0.5 ,
n
(2.31)
а интегральное представление сигнала – выражением
0.5
x[ n ]
X ( f )e j 2 fn df , n , .
(2.32)
0.5
Эти выражения представляют собой пару преобразований Фурье для последовательностей и широко используются в цифровой обработке сигналов (подробнее см. разд. 15). ◄
Полезно иметь в виду, что дискретное представление сигнала в виде ряда можно истолковать, как частный случай интегрального представления. В
самом деле, введём для базисных функций
vk (t ), k ,
обозначение
v(t , sk ), k , , понимая базисные функции, как различные сечения некоторого ядра – функции двух переменных v(t , s ) , соответствующие фиксиро-
ванным значениям s sk , k , переменной s . Подставим выражение
для сигнала x(t ) в виде ряда
x(t )
k
k vk (t )
k v(t , sk )
k
в формулу для нахождения спектральной плотности относительно ядра v (t , s )
с помощью сопряжённого ядра w( s, t ) (2.20)
( s)
k
*
k v(t , sk ) w ( s, t )dt
k
k
*
v(t , sk )w (s, t )dt .
С учётом условия сопряжённости ядер (2.21) получим спектральную плотность
( s)
k (s sk ) .
k
85
Таким образом, дискретное представление действительно можно понимать как интегральное представление со спектральной плотностью ( s ) ,
сосредоточенной в счётном множестве точек sk , k , оси, отображающей переменную s .
2.8. Преобразования сигналов и линейные цепи
2.8.1. Преобразования и операторы
Всюду, где применяются сигналы, они подвергаются преобразованиям.
Под преобразованием можно понимать любое изменение сигнала, как целенаправленное, так и непреднамеренное. Целенаправленные преобразования
осуществляются в созданных специально для
этого устройствах, например, в усилителях,
фильтрах, модуляторах, демодуляторах и т.д.
Непреднамеренными являются, например, пре-
x(t )
T
y (t )
Рис. 2.18. Преобразование сигнала
образования, происходящие при распространении сигналов по линиям и каналам связи и называемые искажениями.
В наиболее общей форме преобразование можно представить схемой
рис. 2.18. Обозначая входной сигнал x(t ) , а выходной сигнал y (t ) , можно записать
y (t ) T x(t ) ,
где T
– обозначение преобразования. Для удобства будем считать, что любое преобразование выполняется некоторым устройством. Такие устройства
далее будем называть цепями. В частности, и любой канал связи можно рассматривать как цепь. Необходимо отметить, что речь всегда будет идти об
идеализированных описаниях (моделях) устройств, а не об их физической реализации.
86
С математической точки зрения преобразование сигнала представляет
собой отображение60 множества k входных сигналов во множество l выходных сигналов. Эти множества могут совпадать, но могут и существенно
различаться. Например, в задаче обнаружения61 полезного сигнала в наблюдаемом на входе приёмного устройства колебании на временнóм интервале
T входные колебания принадлежат L2 T , а множество сигналов на выходе
обнаружителя состоит из двух значений, условно обозначаемых 0 («сигнала
нет») и 1 («сигнал есть»). Здесь будем полагать, что входные и выходные
сигналы принадлежат одному и тому же пространству L2 (или l2 ); в этом
случае преобразование называется оператором. Такая постановка соответствует, в частности, задаче фильтрации сигналов. Канал связи обычно представляет собой соединение62 многих устройств и сред распространения, поэтому осуществляемое им отображение имеет сложный, составной характер.
Некоторые из составных частей этого отображения являются операторами,
другие – например, аналого-цифровые и цифроаналоговые преобразования –
представляют собой отображения более общего вида.
Рассматривая преобразование как оператор общего вида, трудно получить какие-либо выводы, полезные для практики. Чтобы получить практическую пользу, необходимо перейти к более узкому классу операторов. Класс
линейных операторов63 достаточно узок для получения интересных и важных
теоретических результатов и в то же время с хорошей точностью описывает
многие реальные цепи, применяемые в системах связи.
2.8.2. Линейные операторы
Оператор L
называется линейным, если он обладает свойствами аддитивности
60
Отображение – это правило, ставящее в соответствие каждому элементу некоторого множества определённый единственный элемент другого (или, в частности, того же самого) множества
61
Подробно эта задача рассматривается в разд. 9
62
В простых случаях это каскадное (последовательное) соединение; при многолучевом распространении
некоторые части канала соединены параллельно
63
Некоторые нелинейные преобразования колебаний будут рассмотрены в разделе 5
87
L x y L x L y
и однородности
L x L x ,
которые обычно объединяют в одну формулу, выражающую принцип суперпозиции:
L x y L x L y .
Здесь x, y – сигналы (функции), – числа (скаляры).
Это означает, что «поведение» цепи, описываемой линейным оператором, «беспристрастно» к разбиению входного сигнала на части (слагаемые) и
к объединению (суммированию) сигналов, а также к усилению или ослаблению входного сигнала. Результат линейного преобразования суммы сигналов
равен сумме результатов преобразования слагаемых в отдельности. Усиление
или ослабление сигнала на входе линейной цепи приводит к пропорциональному усилению (ослаблению) выходного сигнала без изменения его формы.
Формально аддитивность выражается в том, что линейный оператор и
сложение коммутируют (могут меняться местами без изменения результата).
Аналогично коммутируют линейный оператор и умножение на скалярный
коэффициент (свойство однородности). Формула, описывающая принцип суперпозиции, выражает то обстоятельство, что результат действия линейного
оператора на линейную комбинацию сигналов представляет собой линейную
комбинацию (с такими же коэффициентами) результатов действия этого оператора на каждый из сигналов в отдельности. Понятно, что если принцип суперпозиции выполняется для взвешенной суммы двух сигналов, то он справедлив и для любого количества слагаемых, сколь угодно большого.
Линейность оператора цепи позволяет, если это требуется, разложить
входной сигнал на любые составляющие (слагаемые), найти отклики цепи на
эти составляющие в отдельности и затем сложить эти частные отклики, получив отклик на входной сигнал в целом.
88
Таким образом, если оператор L
, описывающий некоторое устройство (цепь), является линейным, а входной сигнал представлен обобщённым
рядом Фурье x(t )
k uk (t ) , то отклик цепи на этот сигнал равен сумме
k
ряда, составленного из откликов L uk (t ) на базисные функции с теми же
весовыми (спектральными) коэффициентами:
y (t ) L x(t ) L k uk (t ) k L uk (t ) .
k
k
(2.33)
Выражение (2.33) представляет собой основу спектрального метода
анализа линейных цепей. Этот метод применяют в тех случаях, когда найти
отклики L uk (t ) на базисные функции значительно проще, чем найти отклик L x(t ) на сигнал. Вместо обобщённого ряда Фурье может быть использовано интегральное представление входного сигнала относительно
подходящего ядра. Чтобы выяснить, какие базис или ядро будут наиболее
удобными, рассмотрим вначале для простоты действие линейного оператора
в конечномерном линейном пространстве.
Линейные операторы в конечномерных пространствах описываются
квадратными матрицами. Рассмотрим пространство дискретных сигналов,
каждый из которых представляется N комплексными отсчётами ( N -мерное
пространство). Результатом воздействия линейного оператора, описываемого
матрицей Λ ij , i, j 1, N , на вектор-столбец64 x ( x1,..., xN )T является
вектор-столбец y ( y1,..., yN )T , при этом
64
Транспонирование матриц обозначается верхним индексом Т
89
y1 11 12
y
2 21 22
... ...
...
y N N 1 N 2
и
значение
(отсчёт)
1N x1
... 2 N x2
,
...
... ...
... NN xN
...
выходного
сигнала
описывается
выражением
N
yk kj x j , k 1, N .
j 1
Наглядно представить себе поведение конечномерного линейного опеT
ратора можно на примере его действия на векторы e1 1,0,...,0 ,
T
T
e2 0,1,...,0 , ..., eN 0,0,...,1 . Легко видеть, что вектор e1 преобразуетT
ся в вектор 11, 21,..., N1 , аналогично остальные векторы преобразуются
в векторы-столбцы, из которых составлена матрица линейного оператора.
Воздействие линейного оператора на вектор общего вида даёт результирующий вектор, который отличается от исходного нормой и направлением.
Из линейной алгебры известно, что существуют векторы, которые данным оператором преобразуются наиболее простым образом: изменяются
лишь их длины (нормы), но не направления; такие векторы называются собственными векторами, а коэффициенты, определяющие изменение длин65,
называются собственными значениями (собственными числами) оператора.
Если в качестве базиса пространства использовать набор собственных векторов данного оператора, то этот оператор будет описываться диагональной
матрицей
y '1 11 0
y' 0
22
2
... ...
...
0
y 'N 0
0 x '1
...
0 x '2
,
... ... ...
... NN x ' N
...
(2.34)
65
Сказанное верно для пространства над полем вещественных чисел; операторы, действующие в комплексном пространстве, имеют в общем случае комплексные собственные значения.
90
где главная диагональ матрицы составлена из собственных значений, и отсчёты выходного сигнала будут находиться наиболее просто: y 'k kk x 'k ,
k 1, N (штрихами отмечены компоненты векторов относительно собственного базиса). Видно, что для вычисления одного выходного отсчёта вместо
N умножений и N 1 сложений требуется выполнить лишь одно умножение. Далее будет показано, что аналогичное упрощение может быть достигнуто и для пространства аналоговых сигналов L2 при соответствующем выборе базисных векторов (функций).
Переход от конечномерного пространства к бесконечномерному пространству дискретных сигналов l2 достаточно очевиден: векторы x и y в
этом случае содержат бесконечно много компонент, соответственно матрица
линейного оператора становится бесконечной Λ ij , i, j , . Значение
(отсчёт) выходного сигнала определяется выражением
yk
j
kj x j ,
k . , представляющим собой скалярное произведение строки матрицы
оператора и вектор-столбца входного сигнала.
Гильбертово пространство аналоговых сигналов L2 отличается от l2
тем, что множество компонент каждого его вектора несчётно, поэтому дискретные индексы заменяются непрерывными переменными, а место матрицы
Λ ij , i, j , занимает функция (, ) двух переменных, называемая
ядром оператора. Действие линейного оператора на сигнал x(t ) описывается
интегральным выражением
y (t )
(t , s) x(s)ds .
(2.35)
Здесь переменной s можно придать физический смысл и размерность,
соответствующие базисному ядру, выбранному для описания сигнала x . В
91
частности, это может быть частота, если сигнал задан спектральной плотностью (2.23), или время, если сигнал x задан во временной области (2.28).
Функция (t , s ) определяет вклад в значение сигнала y в момент времени t , определяемый значением сигнала x в точке s . Интеграл (2.35) суммирует все такие вклады для вычисления выходного сигнала в текущий момент времени t .
2.8.3. Временнóе описание линейных цепей
Одной из основных задач теории сигналов и цепей является анализ –
нахождение отклика цепи на заданный сигнал.
Используя выражение (2.33), запишем отклик линейной цепи на входной сигнал, заданный в виде динамического представленния (2.28). Тогда
выходной сигнал
y (t ) L x(t ) L x( ) (t )d x( )L (t )d
x( )h(t , )d ,
(2.36)
где весовая функция (ядро оператора) h(t , ) L (t ) описывает отклик
(реакцию) цепи в момент t на входной сигнал в форме -функции, воздействующий на цепь в момент . Выходной сигнал образуется как интегральная сумма (суперпозиция) откликов на -функции, действующие во все моменты времени , , с соответствующими весами x( ) .
Итак, для того, чтобы найти отклик y (t ) линейной цепи на заданный
входной сигнал x(t ) , необходимо знать весовую функцию цепи h(t , ) (ядро
линейного оператора). Эту функцию можно определить по заданной схеме
цепи или найти путём математических преобразований других форм её описания. Для экспериментального определения ядра следовало бы измерить отклики на все -функции, действующие во все моменты времени (разуме92
ется, такое описание может быть только приближённым66). Ядро h(t , ) , как
функция двух переменных, может иметь вид, достаточно сложный для практического применения.
2.8.4. Линейные стационарные цепи
Задача анализа сильно упрощается, если весовая функция h(t , ) фактически зависит только от разности переменных h(t , ) h(t ) , тогда цепь
называется линейной инвариантной к сдвигу (ЛИС-цепью)67, или линейной
стационарной68, а выражение (2.36) приобретает вид
y (t )
x( )h(t )d .
(2.37)
Интеграл в выражении (2.37) известен под названием свёртки или интеграла
Дюамеля69. (Иногда будем использовать символическое обозначение свёртки
выражением x h . Заменой переменных легко показать, что свёртка, как
двухместная операция, коммутативна: x h h x ).
Свойство инвариантности к сдвигу означает, что цепь «ведёт себя»
одинаково по отношению к сигналу независимо от его положения на временной оси: если входной сигнал сдвинуть, то отклик ЛИС-цепи на него сдвигается по времени на такую же величину, не изменяя формы. Представим
сдвинутый (задержанный на величину ) сигнал, как результат воздействия
, т.е. x(t ) S x(t ) , тогда инна исходный сигнал оператора сдвига S
вариантность к сдвигу линейного оператора L
выражается равенством
66
Точность экспериментального определения весовой функции ограничивается несколькими причинами: вопервых, невозможно реализовать бесконечно короткий импульс бесконечной амплитуды ( -функцию), вовторых, измерение возможно только для конечного множества значений переменных t , , в-третьих, любые
измерения сопровождаются погрешностями (ошибками).
67
Некоторые авторы называют такие цепи ЛИВ-цепями (линейными инвариантными во времени), но учитывая, что часто под сигналами понимаются функции пространственных (или других отличных от времени)
переменных, следует признать название «ЛИС-цепи» более корректным
68
Нестационарные, или параметрические, цепи широко применяются при модуляции и демодуляции сигналов (см. разд. 5)
69
Жан Мари Конста́н Дюаме́ль (1797–1872) – французский математик
93
LS x(t ) S L x(t ) .
Иными словами, для ЛИС-цепи линейный оператор, описывающий цепь, и
оператор сдвига коммутируют (т.е. результат не меняется при их перестановке). Рассмотрим с этой точки зрения выражение (2.36), используя введённый оператор сдвига для обозначения сдвинутой -функции
y (t ) L x(t ) L x( ) (t )d L x( )S (t )d
x( )L S (t )d
x( )S L (t )d
и обозначая отклик цепи на (t ) как h(t ) , получаем подтверждение (2.37)
x( )h(t )d .
Если подставить в (2.37) в качестве входного сигнала x(t ) (t ) , легко
видеть, что выходной сигнал в самом деле совпадает с h(t ) :
y (t )
( )h(t )d h(t ) .
Таким образом, функция h(t ) представляет собой отклик ЛИС-цепи на «бесконечно короткий импульс» ( -функцию) и поэтому называется импульсной
характеристикой цепи. Зная входной сигнал и импульсную характеристику
цепи, можно с помощью их свёртки точно определить выходной сигнал (решить задачу анализа). Поэтому импульсная характеристика (ИХ) представляет собой исчерпывающее описание ЛИС-цепи. Условие h(t , ) h(t ) означает, что, зная реакцию h(t ) цепи на воздействие (t ) , можно определить отклик на сдвинутое воздействие (t ) путём простого сдвига импульсной
характеристики на такую же величину . Иными словами, поведение такой
цепи неизменно во времени.
94
При об
бсуждени
ии принци
ипа супер
рпозиции
и было оттмечено, что линеейным
м называеется любо
ой операттор, комм
мутирующ
щий со слложением
м и умнож
жением
м на скалляр. Следовательноо, ЛИС-о
оператор – это опер
ератор, ко
оммутируующий
й со сложением, ум
множениеем на скал
ляр и сдви
игом.
Хотя мы
м рассм
матриваем
м матемаатическиее модели сигнало
ов и цепеей,
иноггда бываеет полезн
но учитыввать физи
ические размернос
р
сти велич
чин. Если
ив
вырражении свёртки
с
полагать,
п
что вход
дной и вы
ыходной ссигналы имеют
и
од
динакоовую физзическую
ю размерн
ность (наапример, тот и дрругой им
меют смы
ысл
напрряжения), то размеерность и
импульсно
ой характтеристикии должна быть 1/с.
Р
Рис. 2.19 RC
C-фильтр нижних
н
часстот
Рис. 2.20 Импульснная характееристика
RC-фильтра ниижних часттот
Примеер 2.18. RC-фильт
R
тр нижни
их частот
т, предстаавленный
й схемой на
1
рис.. 2.19, им
меет импу
ульсную ххарактери
истику h(t ) et / , RC
C , рис. 2.220.
Полльзуясь механичес
м
ской аналлогией, можно
м
сказать, чтто -фун
нкция преедставвляет собоой идеали
изацию «ккороткого энергич
чного толлчка», дей
йствующеего
на ввход цепи
и, а импул
льсная харрактеристтика описсывает «ддвижение»
» на выхооде
таким оббразом, это
цепи
и, происхходящее вследстви
в
ие этого «толчка»;
«
э характтеристтика инеррционност
ти цепи, которая в данном примерее определяяется мгн
новенн
ным заряядом и по
остепенны
ым разряд
дом ёмко
ости. Инеерционноссть опред
деляеттся налич
чием в цеп
пи реакти
ивных (сп
пособных запасать и отдаватть энергию)
элем
ментов – ёмкостей
й и индукттивностей
й. Чисто резистивн
р
ная цепь,, как бы она
о
ни б
была слож
жна, инер
рционносттью не об
бладает и имеет иимпульсну
ую характтеристтику в фоорме -фу
ункции с некоторы
ым весовы
ым коэфф
фициентом
м.◄
95
Часто на импульсную характеристику накладывается ограничивающее
условие каузальности70 (причинности)
h(t ) 0 при t < 0 .
(2.38)
Это условие имеет простой физический смысл: поскольку ИХ является
откликом на -функцию, которая воздействует на цепь в момент времени
t 0 , то очевидно, что реакция цепи физически не может начаться раньше
(следствие не может опережать причину). Поэтому свойство каузальности
называют также физической реализуемостью.
Для уяснения физического смысла интеграла Дюамеля, играющего
важнейшую роль в анализе линейных стационарных цепей, полезно выполнить в (2.37) замену переменных, так что
y (t )
x(t )h( )d .
(2.39)
Кроме того, для простоты примем, что импульсная характеристика
удовлетворяет условию каузальности, т.е. цепь реагирует только на поведение входного сигнала в прошлом. С учётом каузальности интеграл Дюамеля
примет вид
y (t ) x (t )h( ) d .
(2.40)
0
Согласно (2.28) входной сигнал представляется «сплошной» последовательностью -функций с «амплитудными» коэффициентами, равными
значениям сигнала в соответствующие моменты времени. Тогда выражение
(2.40) описывает выходной сигнал в момент времени t , как интегральную
сумму откликов на все эти -функции, воздействовавшие на вход цепи в
прошлом. Каждая такая -функция отстоит от текущего момента t на величину в прошлое, поэтому она умножается на x (t ) , и вклад от неё в текущее значение выходного сигнала определяется весовым коэффициентом –
70
От латинского causa – причина.
96
значчением h( ) импу
ульсной ххарактеристики, со
оответствуующим величине
в
.
Имп
пульсная характеристика лю
юбой реаальной цеепи со врееменем убывает
у
(ззатухаает), таки
им образом цепь поостепенно
о «забываает» прош
шлые знач
чения вхоодногоо сигналаа, рис. 2.2
21. Если оотказатьсся от кауззальностии импульссной хараактери
истики, то
т для наахожденияя текущеего значен
ния выхоодного си
игнала прришлоось бы уч
читывать и будущ
щие значен
ния входн
ного сигннала, что для цепеей,
дейсствующихх в реальном вреемени, оч
чевидно, невозмож
жно. Под
д реальны
ым
врем
менем под
дразумевается таккой режим
м работы устройсттва, когдаа выходн
ной
сигн
нал выраб
батываетсся в темп
пе поступ
пления вх
ходного ссигнала с минималльной задержкоой. В соввременной
й технике связи (в
в тех слуучаях, коггда это воозмож
жно по уссловиям применен
п
ния) неред
дко испол
льзуются так назы
ываемые буб
феррные устрройства памяти,
п
ккуда записываютсяя значениия сигнал
ла, которые
затеем обрабаатываются цифроввыми меттодами. При
П этом устройсттво, выпоолняю
ющее вычисление очередноого значен
ния выхо
одного сиигнала, мо
ожет имееть
досттуп к «буудущим» значениям
з
м входно
ого сигнал
ла, хранящ
щимся в буфере, так
т
что в таких устройств
у
вах требоование кау
узальностти импулььсной хар
рактеристтики ччасто сни
имается, а учёт «ббудущих»
» значени
ий обычнно повыш
шает эффеективн
ность обрработки. Физическ
Ф
ки принци
ип причи
инности, рразумеетсся, не наррушаеется; выхоодной сиггнал при этом выч
числяетсяя с соотвеетствующ
щей задерржкой по времеени.
Рис. 2.21.
2
Иллюсстрация см
мысла интегграла Дюам
меля
Интегррал Дюам
меля иноггда примееняют в другой
д
фоорме. Это связаноо с
тем,, что резуультат свёртки не изменится, если одну
о
из ф
функций в подынттегралльном вырражении продифф
ференциро
овать, а др
ругую – ппроинтегр
рировать.. В
97
соответствии с этим в выражении (2.40) заменим сигнал x(t ) на его производную x '(t ) , а импульсную характеристику – на её интеграл
t
g (t ) h( ) d ,
0
называемый переходной характеристикой и представляющий собой реакцию
цепи на воздействие в виде функции Хэвисайда. Тогда интеграл Дюамеля
приобретает эквивалентную форму
y (t ) x '(t )g ( ) d .
0
Заметим, что ЛИС-цепи представляют собой сравнительно узкий класс
цепей (строго говоря, никакая реальная цепь не может быть линейной хотя бы
потому, что любое реальное устройство состоит из веществ, имеющих конечную температуру плавления или возгорания и безграничное увеличение
мощности входного сигнала рано или поздно привело бы к разрушению цепи; точно так же реальная цепь не может быть строго стационарной уже в
силу конечности времени ее существования). Однако очень многие цепи и
каналы связи могут считаться приближённо линейными (при изменении
входных напряжений и/или токов в некотором диапазоне значений) инвариантными к сдвигу (в пределах некоторого временнóго интервала), а вместе с
удобством анализа и синтеза ЛИС-цепей это составляет огромное преимущество линейной стационарной модели и обусловливает ее широкое использование. Нелинейные и/или нестационарные цепи значительно труднее анализировать (не существует, в частности, общего метода анализа всех нелинейных цепей, аналогичного спектральному методу, рассматриваемому ниже) и синтезировать, однако нелинейные и нестационарные цепи приходится
использовать, т.к. некоторые преобразования сигналов, необходимые для
практики, невозможно осуществить при помощи ЛИС-цепей. Преобразования гармонических колебаний в линейных нестационарных и нелинейных
98
безынерционных цепях, используемые при модуляции и демодуляции сигналов, будут рассмотрены в разделах 5 и 6.
2.8.5. Частотное описание ЛИС-цепей
Интеграл свёртки представляет собой инструмент временнóго анализа
ЛИС-цепей, т.к. позволяет непосредственно найти выходной сигнал в виде
функции времени, исходя из импульсной характеристики и входного сигнала,
также заданных в виде функций времени. Для решения многих задач удобнее
пользоваться частотным описанием цепи и спектральным методом анализа.
При выводе интеграла Дюамеля было использовано динамическое
представление входного сигнала, т.е. рассматривалось действие оператора
ЛИС-цепи на входной сигнал, представленный интегральным выражением
(2.28) относительно базисного ядра (t ) . Ранее было показано, что описание действия конечномерного линейного оператора на вектор сильно упрощается, если вектор представлен в базисе, составленном из собственных векторов данного оператора. Проводя аналогию между конечномерным и бесконечномерным линейными пространствами, можно использовать интегральное представление сигнала относительно ядра, аналогичного собственному
базису; при этом действие оператора должно описываться более простым
выражением, чем свёртка.
Напомним, что линейному оператору соответствуют собственные векторы (функции), обладающие следующим свойством: действие данного оператора на эти функции сводится к их умножению на скалярные (в общем
случае комплексные) коэффициенты. Примем обозначение (t ) для такой
собственной функции линейного оператора; она должна удовлетворять интегральному уравнению
(t , s) (s)ds (t ) ,
99
где – некоторый числовой множитель (собственное значение, соответствующее данной собственной функции). Различным линейным операторам
соответствуют, вообще говоря, различные наборы собственных функций и
собственных значений.
Для линейного инвариантного к сдвигу (стационарного) оператора собственная функция должна удовлетворять более простому уравнению, записываемому с учётом выражения свёртки (2.39):
(t )h( )d (t ) .
Легко убедиться непосредственной подстановкой, что решением этого
интегрального уравнения является комплексная гармоническая функция времени e j 2 ft , где f – её параметр, имеющий смысл частоты:
e
j 2 f (t )
h( )d e
j 2 ft
h( )e
j 2 f
d H ( f ) e j 2 ft .
(2.41)
Итак, если на вход ЛИС-цепи поступает колебание e j 2 ft , то на выходе наблюдается это же колебание, умноженное на комплексное число, зависящее от частоты f . Функция H ( f ) , описывающая эту зависимость, называется комплексной частотной характеристикой (КЧХ)71 цепи и связана с импульсной характеристикой преобразованием Фурье (см. (2.41))
H( f )
h(t )e
j 2 ft
dt .
(2.42)
Следовательно, можно записать и обратное преобразование Фурье, позволяющее найти импульсную характеристику по известной КЧХ:
71
См. ГОСТ 21878–76. Случайные процессы и динамические системы. Термины и определения. Эту характеристику иногда называют комплексным коэффициентом передачи, передаточной функцией и т.п. Согласно тому же ГОСТу передаточная функция получается преобразованием Лапласа импульсной характеристики.
100
h(t )
H ( f )e
j 2 ft
df .
(2.43)
Таким образом, оператору любой ЛИС-цепи соответствует один и тот
же бесконечный набор собственных функций e j 2 ft , f , , а различаются ЛИС-цепи только своими наборами собственных значений: конкретной цепи соответствует КЧХ H ( f ) , определяющая масштабный коэффициент (собственное значение) для каждой функции e j 2 ft при любом значении
частоты f . Этот факт имеет фундаментальное значение для упрощения анализа ЛИС-цепей.
Напомним, что функция двух переменных e j 2 ft может рассматриваться как ядро интегрального представления сигналов из пространства
L2 ( , ) , см. пример 2.13.
Представим входной сигнал интегральным выражением относительно
самосопряжённого ядра e j 2 ft :
x(t )
X ( f )e j 2 ft df .
(2.44)
Это выражение представляет x(t ) «сплошной» суммой базисных функций e j 2 ft с «амплитудными72 коэффициентами», определяемыми спектральной плотностью X ( f ) . Каждая функция e j 2 ft вызывает отклик
H ( f ) e j 2 ft . Следовательно, отклик ЛИС-цепи с КЧХ H ( f ) на сигнал x(t )
представляется интегралом
y (t )
H ( f ) X ( f )e
j 2 ft
df .
(2.45)
72
В действительности амплитуды гармонических составляющих в (2.44) бесконечно малы
101
Учитывая, что y (t )
Y ( f )e
j 2 ft
df , и сравнивая это выражение с (2.45),
можно записать формулу Y ( f ) H ( f ) X ( f ) , связывающую выходной сигнал
ЛИС-цепи с входным сигналом в спектральной форме. Заметим, что это выражение соответствует в конечномерном случае умножению вектора на диагональную матрицу (2.34).
Подытоживая, можно сказать, что представление (2.44) входного сигнала относительно собственного (для любого ЛИС-оператора) базисного ядра
e j 2 ft имеет преимущество перед динамическим представлением, так как
вместо интегрального выражения свёртки временны́х функций связь входного сигнала с выходным описывается произведением функций частоты –
спектральной плотности входного сигнала и КЧХ. Уместно ещё раз напомнить, что «естественное» временнóе представление сигнала x(t ) – это также
спектральная плотность, только относительно ядра (t ) .
Выражение
Y( f ) H( f )X ( f ) ,
устанавливающее связь спектральных плотностей сигналов на входе и выходе ЛИС-цепи через её комплексную частотную характеристику, описывает
спектральный метод анализа линейных стационарных цепей, широко используемый благодаря своей простоте. Именно этим объясняется исключительная роль ряда и интеграла (преобразования) Фурье в теории сигналов и
цепей.
Функция H ( f ) в общем случае является комплексной, что не очень
удобно для практического применения. Комплексную частотную характеристику можно представить в виде H ( f ) K ( f )e j ( f ) . Модуль K ( f ) H ( f )
называют амплитудно-частотной характеристикой (АЧХ), а аргумент
( f ) – фазочастотной характеристикой (ФЧХ) цепи. Значение АЧХ на
102
определённой частоте показывает, во сколько раз изменится амплитуда гармонического колебания этой частоты при прохождении через данную цепь.
Значение ФЧХ показывает соответствующее изменение начальной фазы гармонического колебания.
Пример 2.19. RC-фильтр нижних частот, представленный на рис. 2.18,
имеет амплитудно-частотную характеристику и фазочастотную характеристику, показанные на рис. 2.22.◄
Значение комплексной частотной характеристики при любой заданной
частоте f может в принципе быть измерено, как отношение сигнала на выходе ЛИС-цепи к входному сигналу, если этот входной сигнал – функция
e j 2 ft (и только в этом случае!). Таким образом, функция e j 2 ft при произвольно задаваемой частоте f может рассматриваться, как испытательный
сигнал, позволяющий получить описание цепи (КЧХ). На практике для измерения КЧХ на вход цепи подают от генератора вещественное гармоническое
колебание, частоту которого можно задавать произвольно; при каждом заданном значении частоты измеряют вольтметром амплитуды выходного и
входного напряжений и находят значение АЧХ, как отношение этих амплитуд. Для измерения фазочастотной характеристики необходим прибор, реагирующий на разность фаз выходного и входного напряжений; эта разность
фаз и даёт значение ФЧХ на данной частоте.
Другим испытательным сигналом является -функция, которая могла
бы быть использована для получения отклика цепи в виде импульсной характеристики (если бы воздействие в виде -функции можно было реализовать
практически). Поскольку КЧХ и импульсная характеристика связаны друг с
другом взаимно однозначно (через пару преобразований Фурье), должна существовать связь и между соответствующими им испытательными сигналами. В самом деле, -функция может рассматриваться как интегральная сумма одновременно воздействующих на вход цепи функций e j 2 ft : так как её
103
спектральная
плотность
равна
(t )e
j 2 ft
dt 1 ,
следовательно,
(t )
1 e
j 2 ft
df .
а). Амплитудно-частотная характеристика
RC-фильтра нижних частот
б). Фазочастотная характеристика
RC-фильтра нижних частот
Рис. 2.22
Каждая из комплексных гармонических функций умножается цепью на
соответствующее значение КЧХ, поэтому импульсная характеристика – отклик на -функцию
h(t )
H ( f )e
j 2 ft
df
– представляет собой как бы «равнодействующую» откликов на все такие
функции, действующие на ЛИС-цепь одновременно.
Заметим, что указанные измерения КЧХ и импульсной характеристики
на практике точно выполнить нельзя. Для практического измерения КЧХ потребовалось бы бесконечное время для генерирования функций e j 2 ft (нельзя забывать, что они определены на всей временнóй оси!) и измерения отношений выходных сигналов к входным с бесконечной точностью при всех
значениях частоты f . То же справедливо и для измерения АЧХ и ФЧХ в отдельности. В свою очередь, -функция представляет собой «бесконечно короткий импульс бесконечно большой амплитуды», который также не может
быть реализован точно. На практике КЧХ и импульсную характеристику
104
ЛИС-цепи можно измерить приближённо с помощью отрезков гармонических испытательных сигналов конечной продолжительности и коротких импульсов большой (но конечной) амплитуды. Отрезки гармонических колебаний при измерении АЧХ и ФЧХ должны иметь длительность много больше
времени установления переходных процессов в цепи, тогда «с точки зрения
цепи» они неотличимы от бесконечно длинных гармонических колебаний.
Аналогично, импульс можно считать коротким, если его длительность много
меньше длительности переходных процессов в цепи (в этом случае «с точки
зрения цепи» он практически неотличим от -функции). Требования к длительности «короткого» импульса, используемого взамен -функции при измерении импульсной характеристики, можно определить и со спектральной
точки зрения.
Пример 2.20. RC-фильтр нижних частот, представленный на рис. 2.18,
имеет амплитудно-частотную характеристику
K( f )
1
1 (2 f )
2
, где
RC – параметр цепи, называемый постоянной времени (см. пример 2.18).
Под полосой пропускания цепи обычно понимают диапазон частот, в котором значение АЧХ составляет по отношению к её максимальному значению
не менее чем 1 / 2 ≈ 0,707. Тогда граница полосы пропускания (граничная
частота) F связана с постоянной времени RC-фильтра соотношением
2 f 1 .
Пусть на эту цепь воздействует прямоугольный (чётный) импульс длительности
X ( f ) A и
и
и
амплитуды
A;
его
спектральная
плотность
sin( f и )
показана на рис. 2.17. Для того, чтобы отклик цепи
fи
практически совпадал с импульсной характеристикой, необходимо, чтобы в
полосе пропускания цепи спектральная плотность X ( f ) была практически
105
неотличима от постоянной спектральной плотности -функции, т.е. должно
выполняться условие и RC . ◄
Часто в выражениях, связанных со спектральным анализом сигналов и
ЛИС-цепей, вместо циклической частоты f используется круговая частота
2 f . Пара (2.22) – (2.23) преобразований Фурье в результате замены переменных принимает вид
H ( )
h(t )e
jt
dt ,
1
h(t )
2
H ( )e
jt
d .
2.8.6. Фильтры
Одной из наиболее распространённых операций, применяемых к электрическим колебаниям (сигналам), является фильтрация. Устройства, реализующие такие операции, называются фильтрами. Фильтр – это цепь, которая
предназначена для избирательного воздействия на различные составляющие
(компоненты) колебания, поступающего на вход. В большинстве случаев под
этим понимается частичное или полное подавление нежелательных гармонических составляющих в спектре колебания. Таким образом, фильтром в широком смысле является любая ЛИС-цепь, имеющая непостоянную АЧХ.
Кроме того, известны фильтры с постоянной АЧХ, предназначенные для целенаправленного изменения фазового спектра сигнала. Наиболее часто под
фильтрами понимают типовые фильтры [8], для которых характерно наличие
полос пропускания и полос задерживания. Под полосой пропускания понимается частотный интервал, в котором АЧХ фильтра равна (точно или приближённо) единице. Полосой задерживания называется частотный диапазон, в
котором АЧХ равна нулю (или близка к нулю).
Фильтр нижних частот (ФНЧ) имеет полосу пропускания, содержащую частоту 0. Выше некоторой частоты f гр , называемой граничной часто106
той,, лежит полоса зад
держивани
ия (рис. 2.23
2
а; показаны тоолько нео
отрицателльныее частоты)). Для фи
ильтра веерхних частот (ФВ
ВЧ), наобборот, вы
ыше грани
ичной частоты лежит по
олоса проопусканияя, а полоса задержиивания со
одержит чач
стотту 0 (рис. 2.23 б). Полоса
П
п
пропускан
ния полосово́го филльтра (П
ПФ) лежитт в
окреестности некоторо
ой центраальной чаастоты; чаасто́ты вы
ыше верхн
ней грани
ичной частоты f гр2 и ни
иже нижн
ней грани
ичной частоты fгр11 относяттся к полоосе
задеерживани
ия (рис. 2..23 в). Рееже́кторн
ный фильтр (РФ) имеет по
олосу задеерживвания, соссредоточеенную окколо центр
ральной частоты;
ч
остальнаая часть оси
о
часттот принаадлежит полосе
п
пр опускани
ия (рис. 2.23 г).
Рис. 2.23. Идеалььные АЧХ ттиповых фи
ильтров: ФНЧ
Ф
(а), ФВ
ВЧ (б), ПФ (в), РФ (г))
Идеальн
ными считаются ф
фильтры перечисле
п
енных типпов, имею
ющие АЧ
ЧХ,
равн
ные 1 в поолосе про
опусканияя и 0 в по
олосе задеерживаниия (см. рис. 2.23). ТаТ
кие фильтры
ы не могутт быть рееализован
ны (в часттности, поо причин
не их некааузалььности). Для
Д того чтобы ф
фильтры можно
м
бы
ыло реалиизовать, приходиттся
допуускать неекоторое непостояянство (нееравномер
рность) А
АЧХ в по
олосах прро-
1
107
пусккания и задерживвания. К
Кроме тогго, из-за невозмоожности реализации
филльтра с АЧ
ЧХ, меняяющейся н
на границ
це полос скачкооббразно, вм
место еди
инствеенной грааничной частоты
ч
п
приходитсся вводитть частотнный интеервал, наззываем
мый перееходной полосой,
п
в предел
лах котор
рой происсходит постепенн
п
ное
измеенение АЧХ
А
(переход от п
полосы пропускан
п
ния к поллосе задеерживани
ия).
Поээтому при
и формули
ировании
и требован
ний к фил
льтру, котторый преедполагаеется п
построитьь, задаются границ
цы полей
й до́пуско
ов для АЧ
ЧХ. Для примера на
в предел
рис.. 2.24 дляя фильтраа нижних частот по
оказаны границы,
г
лах которы
ых
допуускается неравном
мерность АЧХ, оп
пределяем
мая парам
метрами 1 и 2 , а
такж
же нижняяя f1 и веерхняя f 2 частоты
ы, определяющие ппереходн
ную полоссу.
Среди всех фильтров,
ф
, АЧХ котторых уккладываюттся в доппусковый «коридорр»,
выб
бирается тот,
т
котор
рый можеет быть реализова
р
ан на имееющейся элементн
э
ной
базее с миним
мальными
и затратам
ми труда и времени
и и т.п.
Рис. 2.244. Допусковвые поля дл
ля ФНЧ
Для тогоо, чтобы численно
ч
о охарактееризоватьь близостьь формы АЧХ филльтра (ФНЧ илли ПФ) к идеальн
ной прямо
оугольной
й, исполььзуют коээффициеннт
моугольноости
прям
K п0.1
f 0.1
,
f 0.707
где f 0.707 и f 0.1 – зн
начения ш
ширины полосы
п
пр
ропусканиия по уро
овням 0.7707
(чтоо соответсствует осслаблению
ю сигналаа на 3 дБ)) и 0.1 (оослаблени
ие 20 дБ) от
1
108
максимального значения АЧХ соответственно73. Коэффициент прямоугольности любого реального фильтра больше единицы; для идеального фильтра
он равен 1.
До сих пор внимание было сосредоточено на амплитудно-частотных характеристиках фильтров. Однако важен для большинства применений также
вид фазочастотной характеристики. Позже будет показано, что сигнал, прошедший через ЛИС-цепь (фильтр), не меняет формы только если ФЧХ фильтра является строго линейной (вторым условием отсутствия искажений формы сигнала служит постоянство АЧХ в полосе частот, занимаемой сигналом). Иначе различные гармоники сигнала приобретают разное временное
запаздывание, что и приводит к искажениям формы (фазовым искажениям).
Непостоянство АЧХ в полосе, занимаемой спектром сигнала, также приводит
к искажениям формы; эти искажения называются частотными. Фазовые и
частотные искажения вместе называются линейными, т.к. их всегда можно
представить, как результат действия на сигнал линейной стационарной цепи.
Отличительной особенностью линейных искажений является то, что они выражаются лишь в изменениях амплитуд и фаз имеющихся гармонических составляющих сигнала, в отличие от нелинейных искажений сигнала, сопровождающихся появлением в его спектре «лишних» гармоник.
Как правило, желательным свойством фильтра является линейность его
ФЧХ (отсутствие фазовых искажений). Однако для аналоговых фильтров это
недостижимо74; можно лишь пытаться в той или иной степени приблизить
форму ФЧХ к линейной.
Ещё одна характеристика фильтра, которая используется на практике –
групповое время задерживания (ГВЗ). Так называют время, необходимое для
прохождения через фильтр пучности биений двух близких частот и
d [10]. Это время зависит от частоты 2 f . Практический смысл
73
Вместо уровня 0.1 иногда используют уровни 0.01 (–40 дБ), 0.001 (–60 дБ), 0.0001 (–80 дБ) (см. [9])
Цифровые (точнее, дискретные) фильтры с конечной импульсной характеристикой могут иметь строго
линейную ФЧХ; см. подробнее разд. 12
74
109
ГВЗ на частоте 0 заключается в том, что это – время, на которое запаздывает огибающая амплитудно-модулированного сигнала с несущей частотой 0 .
Формально ГВЗ определяется как производная ФЧХ в точке , взятая с обратным знаком
гр ( )
d ( )
.
d
Для того, чтобы скомпенсировать (хотя бы частично) фазовые искажения сигналов, применяют так называемые всепропускающие фильтры, или
фазовые контуры. Всепропускающим такой фильтр называется потому, что
вся частотная ось лежит в полосе пропускания (АЧХ тождественно равна 1).
Таким образом, этот фильтр влияет только на фазовый спектр сигнала. Фазовые искажения сигнала, вносимые некоторым фильтром, можно иногда
скомпенсировать включённым следом за ним фазовым контуром с соответственно подобранной ФЧХ.
2.9. Ряд Фурье и интеграл Фурье
Как было показано выше, гармонические функции e j 2 ft играют исключительно важную роль в анализе цепей, так как эти функции (и только
они!) не изменяют формы под действием любого линейного стационарного
оператора, а лишь умножаются на комплексные числа. Очень многие применяемые на практике цепи можно считать (с большей или меньшей точностью) линейными стационарными. Благодаря этому среди всех базисов пространств сигналов, применяемых в теории и практике, базис, составленный
из комплексных экспонент (будем далее называть его базисом Фурье) и ядро
e j 2 ft получили наибольшее распространение и заслуживают более детального изучения.
110
2.9.1.
Ряд Фурье, его формы, свойства спектров
Для пространства L2 (T ) сигналов конечной длительности T и ограни 1 j 2 kt
T
ченной энергии ортонормальный базис
e
, k , является полT
ным, следовательно, всякий сигнал
T / 2,T / 2
x (t ) L2 (T )
можно на интервале
представить обобщённым рядом Фурье по ортонормальным
функциям
x (t )
k
1 j
e
T
k
2
kt
T
(2.46)
или рядом Фурье по ортогональным функциям
x (t )
k
Ck e
2
kt
T
j
.
(2.47)
Спектральные коэффициенты для этих рядов определяются соответственно
выражениями
1
k
T
T /2
x(t )e
j
2
kt
T dt
(2.48)
T /2
и
1
Ck
T
T /2
x(t )e
j
2
kt
T dt .
(2.49)
T /2
Для ряда (2.46) справедливо равенство Парсеваля
T /2
2
x (t ) dt
k
T / 2
2
k .
Для ряда (2.47) выполняется аналогичное равенство, учитывающее норму базисных функций
T /2
T / 2
2
x (t ) dt T
k
2
Ck .
111
До сих пор сигнал и базисные функции рассматривались на конечном
временнóм интервале T / 2, T / 2 . Нетрудно видеть, что базисные функции
могут рассматриваться и вне этого интервала, то есть на всей бесконечной
j 2 kt
T
временнóй оси. Поскольку все функции e
, k , периодичны,
причём для их периодов величина T представляет собой наименьшее общее
кратное, ряды (2.46) и (2.47) при t , определяют периодическую
функцию, которая представляет собой сигнал x(t ) , повторяющийся с периодом T , т.е. периодически продолженный на всю временную ось.
Таким образом, выражение ряда Фурье одинаково пригодно для представления сигналов, рассматриваемых на конечном временном интервале, и
периодических сигналов. Коэффициенты в обоих случаях находятся по формулам (2.48) или (2.49). Различие проявляется только в области определения
базисных функций и сигнальной функции – рассматривается ли в качестве
таковой конечный интервал длительности T или вся ось , . В дальнейшем, если не сказано обратное, предполагается, что сигналы, представляемые рядами Фурье, являются периодическими.
Далее будет рассматриваться комплексный ряд Фурье в форме (2.47). Эта
форма ряда Фурье пригодна для представления комплексных функций. Но
даже для вещественного сигнала коэффициенты Ck в общем случае являются
комплексными, т.е. Ck Ck e jk . Для удобства графического изображения
коэффициентов рассматривают отдельно их модули и аргументы, при этом
совокупность модулей Ck , k , называется амплитудным спектром, а
совокупность аргументов k , k , – фазовым спектром сигнала. Для
наглядности амплитудный и фазовый спектры изображают решётчатыми
спектральными диаграммами, на которых соответствующие величины пока-
112
заны
ы длинам
ми вертик
кальных оотрезков, а сами этти отрезкки размещ
щены вдооль
гори
изонтальн
ной часто
отной оси
и с шагом
м, равным величин е F 1 T (для перриодичческого сигнала
с
этто частотаа его повтторения), рис. 2.255.
а
б
Риис. 2.25. Ам
мплитуднаяя и фазоваяя спектралььные диаграммы вещеественного
о сигнала
Если си
игнал x(t ) являетсяя вещесттвенным, его ампллитудный спектр обо
ладаает свойством чётн
ности, а ф
фазовый – свойств
вом нечёттности. Деействителльно, п
произволльный спеектральны
ый коэффи
ициент нааходится как
1
Ck
T
T /2
x(t )e
j
2
kt
T dt .
T /2
Примени
им к поды
ынтегралььному вы
ыражению
ю операциию компл
лексного сос
пряж
жения, а чтобы
ч
реззультат н
не измени
ился, прим
меним таккую же оп
перацию ко
всем
му выраж
жению. Даалее учтёём, что дл
ля вещесттвенного сигнала x* (t ) x(t ) ,
тогд
да
*
*
2
2
1 T /2
1 T /2
j kt
j ( k )t
*
Ck
x (t )e T dtt
x(t )e T
dt C* k .
T T /2
T T /2
Таким образом,
о
коэффици
к
иенты ком
мплексно
ого ряда Ф
Фурье вещ
щественнного сигнала поопарно ко
омплексн
но сопряж
жены. Пол
льзуясь эттим свойсством, моожно п
получить другую форму ряяда Фурьье, также находящ
щую прим
менение, но
приггодную для
д предсставленияя только веществвенных пеериодичесских сигн
налов..
1
113
Просуммируем пару базисных функций с номерами (индексами) k и
( k ) с учётом соответствующих спектральных коэффициентов:
Ck e
j
Ck
2
kt
T
C k e
2
jk j T kt
e e
j
2
kt
T
Ck
Ck e
j
2
kt
T
Ck*e
2
jk j T kt
e
e
j
2
kt
T
2
2 Ck cos
kt k .
T
(2.50)
Повторяя такое суммирование для всех k 1,2,3,... , ряд Фурье (2.47)
можно записать в тригонометрической форме
x(t )
2
Ak cos T
k 0
kt k ,
(2.51)
где
2 Ck , k 0,
Ak
Ck C0 , k 0,
так как коэффициент C0 , равный постоянной составляющей (среднему значению) вещественного сигнала, не имеет пары и является вещественным.
Ещё одна форма ряда Фурье для вещественных сигналов основана на
разложении по синусоидальным и косинусоидальным функциям кратных частот, образующим ортогональный базис75; периодический сигнал представляется рядом
a0
2
2
x(t ) ak cos kt bk sin
kt ,
T
T
2 k 1
со спектральными коэффициентами
T /2
2
ak
T
2
(
)
cos
x
t
kt dt , k 0, ,
T
T / 2
2
bk
T
T /2
2
x (t )sin
kt dt , k 1, .
T
T /2
75
Попарную ортогональность базисных функций легко проверить непосредственным вычислением их скалярных произведений на интервале длительности T
114
Сложим две функции этого базиса, имеющие одинаковую частоту, с
учётом коэффициентов и воспользуемся формулой Эйлера:
ak cos
2
2
e
kt bk sin
kt ak
T
T
a jbk j
k
e
2
2
kt
T
j
a jbk j
k
e
2
2
kt
T
e
2
j
2
kt
T
bk
e
j
2
kt
T
e
2j
j
2
kt
T
2
kt
T
.
Сравнивая полученное выражение с выражениями (2.50), видим, что
Ck
ak jbk
a jbk
, а C k k
, откуда следуют связи между спектральными
2
2
коэффициентами для различных форм ряда Фурье
Ck
ak2 bk2
a
, C0 0 ,
2
2
Ak ak2 bk2 , A0
a0
b
, k arctg k .
ak
2
Рис. 2.26. Периодическая последовательность прямоугольных импульсов
Поскольку косинусоида обладает свойством чётности, а синусоида – нечётности, то для чётного сигнала все коэффициенты при синусоидальных
компонентах ряда должны быть равны 0; аналогично, все коэффициенты при
косинусоидальных компонентах равны нулю, если сигнал – нечётная функция (при этом равна нулю и постоянная составляющая C0 A0 a0 / 2 ).
Пример 2.21. Периодическая с периодом T последовательность прямоугольных импульсов амплитуды U и длительности и показана на рис. 2.26.
Спектральные коэффициенты комплексного ряда Фурье находятся как
115
Ck
где
1
T
T /2
u (t )e
j
2
kt
T dt
T /2
введено
обозначение
k и
sin
1
2
U и
2 ,
U
ktdt
cos
k и
T
T
T
и /2
2
и /2
круговой
частоты
повторения
импульсов
2
2 F . Таким образом, диаграмма амплитудного спектра сигнала,
T
показанная на рис. 2.27, имеет огибающую в форме функции вида
sin x
. Заx
метим, что вследствие чётности сигнала все коэффициенты Ck оказались вещественными, так что компоненты фазового спектра равны нулю для всех k .
Постоянная составляющая сигнала равна C0
U и
U q , где q T и – паT
раметр импульсной последовательности, называемый скважностью.
Рис. 2.27. Спектр периодической последовательности прямоугольных импульсов
Последовательности прямоугольных импульсов широко применяются
в радиотехнике и связи в качестве моделей реальных сигналов, поэтому
спектр данного сигнала достоин более внимательного рассмотрения. Прежде
всего, обратим внимание, что при возрастании частоты от нулевого значения
огибающая спектра впервые пересекает ось частот при
2
и
и
2
, то есть при
или при f 1 и . Спектральные составляющие следуют друг за дру-
116
гом по частотной оси с шагом F 1 T . Таким образом, численное значение
скважности прямоугольной импульсной последовательности показывает,
сколько спектральных составляющих попадают в интервал, равный полуширине 1 и главного лепестка огибающей спектра.
Частичная сумма ряда Фурье может служить аппроксимацией сигнала.
Точность аппроксимации тем выше, чем больше слагаемых содержит сумма.
На рис. 2.28 показаны графики частичных сумм ряда Фурье периодической
последовательности прямоугольных импульсов при числе слагаемых 5, 11 и
25. Видно, что аппроксимация становится точнее с ростом количества удерживаемых слагаемых. Квадрат нормы (энергия) ошибки аппроксимации при
удержании в сумме 2 N 1 слагаемых (от N -го до N -го) может быть
найден на основе равенства Парсеваля как
2
T
N 1
k
2
Ck T
k N 1
2
Ck T
k
2
Ck T
N
k N
2
Ck . ◄
При увеличении числа слагаемых частичной суммы ряда Фурье ошибка аппроксимации периодического сигнала стремится к нулю по норме пространства L2 (T ) , то есть последовательность частичных сумм ряда сходится
к своему пределу (периодическому сигналу) в среднеквадратическом смысле:
2
T /2
2
u
(
t
)
u
(t ) dt 0 .
(2.52)
T / 2
Здесь u (t ) – аппроксимация сигнала u (t ) . Среднеквадратическая сходимость
не гарантирует, что разность частичной суммы ряда и представляемого ею
сигнала будет стремиться к нулю в каждой точке временной оси. Если функция, разлагаемая в ряд Фурье, содержит скачки (разрывы первого рода), оказывается, что максимальное значение упомянутой разности стремится не к
нулю, а к конечной величине. Для периодической последовательности прямоугольных импульсов эта максимальная разность составляет примерно 9%
117
от амплитуды импульса. Этот факт известен как явление Гиббса76, и его причиной является среднеквадратическая (а не равномерная) сходимость частичных сумм ряда Фурье для разрывных функций. При равномерной сходимости предел последовательности непрерывных функций, каковыми являются частичные суммы ряда Фурье, сам должен быть непрерывной функцией; в
рассмотренном же примере пределом является разрывная (скачкообразная)
функция.
а
б
Рис. 2.28. Аппроксимации периодической последовательности,
показанной на Рис. 2.26. суммами 5 (а), 11 (б) и 21 (в) членов ряда Фурье
Для того чтобы последовательность частичных сумм ряда Фурье сходилась к своему пределу равномерно, необходимо, чтобы спектральные коэффициенты Ck убывали с ростом индекса (при k ) достаточно быстро
[5], а именно, быстрее, чем последовательность чисел 1 / k . Коэффициенты
ряда Фурье прямоугольной импульсной последовательности убывают, как
76
Джосайя Уиллард Гиббс (1839-1903) – выдающийся американский физик, один из основателей статистической физики
118
можно видеть, со скоростью, равной 1 / k , вследствие чего и имеет место
сходимость лишь в среднеквадратическом смысле, т.е. по норме пространства L2 (T ) .
В некоторых практических задачах, таких, как синтез цифровых фильтров, явление Гиббса нежелательно, т.к. оно приводит к сильной неравномерности амплитудно-частотной характеристики фильтра; поэтому разработаны методы уменьшения гиббсовских пульсаций (осцилляций) АЧХ, основанные на коррекции коэффициентов ряда Фурье («ускорении» убывания
импульсной характеристики цифрового фильтра). Подробнее этот вопрос будет рассмотрен в п. 12.4.
2.9.2.
Свойства преобразования Фурье
Ряд Фурье представляет собой удобный инструмент анализа сигналов,
заданных на конечном временном интервале, а также периодических колебаний, так как позволяет заменить несчётное множество (континуум) значений
аналогового сигнала на этом интервале (на периоде) счётным множеством
j 2 kt
T
спектральных коэффициентов. Базис Фурье e
, k , полон в про
странстве L2 (T ) , поэтому любой сигнал из L2 (T ) можно сколь угодно точно
аппроксимировать частичной суммой ряда Фурье, выбрав достаточно большое число слагаемых. Среди всех полных в L2 (T ) базисов базис Фурье имеет
то преимущество, что он составлен из функций, собственных для любого
ЛИС-оператора. Это максимально упрощает решение задачи анализа ЛИСцепи при периодическом входном сигнале: определение отклика сводится к
умножению спектра сигнала на комплексную частотную характеристику цепи.
119
Для пространства L2 ( , ) сигналов, заданных на всей временной оси
и имеющих ограниченную энергию, базис {e
j
2
kt
T ,k
, } не является
полным ни при каком T , и, следовательно, непригоден для представления
сигналов, так как ошибку аппроксимации нельзя в общем случае сделать
произвольно малой путём учёта достаточного числа слагаемых ряда Фурье. В
самом деле, если сигнал имеет бесконечную длительность и конечную энергию, т.е. принадлежит пространству L2 ( , ) , то он должен убывать при
стремлении t , и притом достаточно быстро. Ряд Фурье при любом выборе T определяет периодическую функцию, которая может совпадать с заданным сигналом только на интервале длительности T , а за его пределами
неизбежно будет отличаться от него. Более того, любая периодическая функция имеет бесконечную энергию, поэтому ошибка аппроксимации сигнала из
L2 ( , ) усечённым рядом Фурье при любом T будет иметь бесконечную
норму. Это и означает неполноту счётного базиса Фурье в L2 ( , ) 77.
Итак, единственным способом использовать комплексные экспоненты в качестве базисных функций (а это необходимо для применения спектрального
метода анализа ЛИС-цепей) является переход к непрерывному представлению сигналов из L2 ( , ) интегралом Фурье
x(t )
X ( f )e j 2 ft df ,
(2.53)
где
X(f )
x(t )e j 2 ft dt
(2.54)
– спектральная плотность.
77
Напомним, что известны ортонормальные счётные базисы, полные в
L2 ( , )
(например, базис,
составленный из функций Эрмита [5]), но они, к сожалению, не являются собственными для ЛИС-цепей.
120
Между рядом и интегралом Фурье имеется тесная связь, обусловленная
сходством базисных функций ряда и ядра интегрального представления. Рассмотрим непериодический сигнал x(t ) конечной длительности c (импульс),
определённый на всей временной оси, т.е. при t , . (Функция, равная
нулю всюду за пределами интервала конечной длины, называется финитной,
а этот интервал – носителем функции.) Спектральная плотность X ( f ) сигнала x(t ) определяется выражением прямого преобразования Фурье (2.54).
Повторение финитного сигнала x(t ) с периодом T , бо́льшим, чем длительность c , даёт периодический сигнал x (t )
x(t kT ) , который в силу
k
своей периодичности может быть представлен рядом Фурье со спектральными коэффициентами, определяемыми выражением (2.49). Сравнивая выражения (2.54) и (2.49) и учитывая, что интеграл в бесконечных пределах от финитной функции равен интегралу по интервалу, содержащему носитель
функции, можно записать равенство
1
Ck
T
T 2
T 2
x(t )e
j
2
kt
T dt
1
T
x(t )e j 2 ft dt
k
f
T
1 k
X
T T
.
(2.55)
Таким образом, спектральная плотность импульсного сигнала совпадает по форме с огибающей спектральных коэффициентов ряда Фурье периодической последовательности, образованной повторением данного импульсного сигнала. Заметим, что с увеличением периода повторения спектральные
составляющие следуют друг за другом по оси частот все чаще. Непериодический сигнал можно представить, как предельный случай периодического при
T , поэтому можно считать (нестрого!), что спектральная плотность –
это «сплошная» совокупность спектральных коэффициентов. Следует, однако, иметь в виду, что амплитуда каждой спектральной составляющей при
этом предельном переходе согласно (2.55) также стремится к нулю, в отличие
от значений функции спектральной плотности. Кроме того, не следует забы121
вать, что для сигнала x(t ) , имеющего размерность напряжения, спектральная
плотность X ( f ) имеет размерность [Вольт/Герц], в то время как единицей
измерения модулей коэффициентов ряда Фурье (2.49) в этом случае является
Вольт78. Поэтому спектр периодического сигнала и спектральная плотность
финитного сигнала – два различных объекта. Тем не менее, формальное
сходство, выражаемое формулой (2.55), можно использовать, например, для
расчёта спектра последовательности, полученной периодическим повторением финитного сигнала с уже известной спектральной плотностью.
Рассмотрим основные свойства преобразования Фурье, которые полезно знать при практическом его применении. Для краткости будем использовать обозначение x(t ) X ( f ) для функций времени и частоты, связанных
парой преобразований Фурье (напомним, что прописной буквой обозначается результат прямого преобразования Фурье функции, обозначенной строчно́й буквой). Отметим, что строгие доказательства некоторых теорем [5],
устанавливающих эти свойства, предполагают принадлежность сигнала (или
его спектральной плотности) не только пространству L2 ( , ) , но и пространству L1 ( , ) абсолютно интегрируемых функций, удовлетворяющих
условию
x(t ) dt . Функция из L2 ( , ) может, вообще говоря, не
принадлежать L1 ( , ) , но для всех практически применяемых сигналов
эти различия не играют роли.
1. Свойство линейности означает, что преобразование Фурье подчиняется принципу суперпозиции
k xk (t ) k X k ( f ) .
k
78
Подразумевается, что функция
k
exp j 2 ft
физической размерности не имеет
122
Это достаточно очевидное свойство упрощает нахождение спектральной плотности сигнала, если его можно представить линейной комбинацией
других сигналов, для которых спектральные плотности уже известны.
2. Дуальность (частотно-временная симметрия)
x ( f ) X ( t ) ,
(2.56)
где x () понимается как спектральная плотность временной функции X () .
Читателю предлагается доказать это свойство в качестве упражнения.
3. Теорема сдвига79
Для сигнала x(t ) со спектральной плотностью X ( f ) рассмотрим его
задержанную на время копию x (t ) x (t ) . Её спектральная плотность
X ( f )
x(t )e
j 2 ft
dt
x( )e j 2 f ( ) d e j 2 f X ( f ) .
Таким образом, спектральная плотность сигнала, задержанного на величину
, равна спектральной плотности исходного сигнала, умноженной на комплексный коэффициент e j 2 f :
x(t ) e j 2 f X ( f ) .
Из теоремы сдвига следует интересный вывод: задержка сигнала без
изменения его формы в принципе (если отвлечься от трудностей практической реализации) может быть осуществлена ЛИС-цепью80. Действительно,
задержке сигнала на время соответствует согласно теореме сдвига умножение его спектральной плотности на функцию частоты, которую можно
трактовать как КЧХ линейной стационарной цепи H ( f ) e j 2 f . Амплитудно-частотная характеристика идеальной линии задержки постоянна и равна единице на всей частотной оси, а фазочастотная характеристика линейна и
79
Это и другие названия свойств преобразования Фурье не являются общеупотребительными и вводятся
лишь для удобства
80
На практике такие цепи могут быть реализованы лишь приближённо; они называются линиями задержки
123
имеет отрицательный наклон, пропорциональный величине задержки. На
практике АЧХ любой цепи не может быть строго постоянной, а ФЧХ – строго линейной, поэтому реальные линии задержки всё же изменяют форму сигнала, более или менее значительно. Теоретически можно рассматривать и
«линию опережения», сдвигающую сигнал по временной оси влево, её ФЧХ
должна быть линейно растущей функцией частоты. Практически реализовать
такую цепь, конечно, невозможно даже приближённо.
4. Теорема изменения масштаба
Рассмотрим сигнал x(t ) со спектральной плотностью X ( f ) и его вариант xm (t ) x( mt ) , сжатый по оси времени в m раз, m 0 . Спектральная
плотность сигнала xm (t )
Xm( f )
x(mt )e
j 2 ft
dt
x( )e
j 2 f m d
m
1 f
X
m m
(2.57)
представляет собой вариант спектральной плотности X ( f ) , растянутый в m
раз по оси частот и сжатый в m раз по оси значений (по вертикали).
Теперь положим, что множитель m 0 . Тогда
Xm( f )
x ( t )e
j 2 ft
dt
1
x( )e
x( )e
f
j 2
d
f
X
.
1
j 2 f d
(2.58)
Применение отрицательного множителя к временно́й переменной
означает не только сжатие сигнала по времени, но и обращение (инверсию)
временной оси. Конечно, если m 1 , то на самом деле имеет место не сжатие, а растяжение сигнала по времени (и сжатие его спектральной плотности
по частоте). Из (2.58) следует, что масштабное изменение спектральной
124
плотности по вертикали не зависит от знака коэффициента m . Объединяя
(2.57) и (2.58), можно окончательно записать
x(mt )
1 f
X .
m m
5. Теорема дифференцирования устанавливает связь между спектральными плотностями сигнала и его производной.
Обозначим через xd (t ) dx (t ) dt производную по времени сигнала x(t )
. Спектральная плотность производной равна
Xd ( f )
dx(t ) j 2 ft
e
dt x(t )e j 2 ft
dt
j 2 f
x(t )e j 2 ft dt .
Здесь использован приём интегрирования по частям. Первое слагаемое полученного выражения равно нулю, так как сигнал x(t ) в силу принадлежности
L2 ( , ) , т.е. ограниченности энергии, стремится к нулю при t . Та-
ким образом, дифференцирование сигнала эквивалентно умножению его
спектральной плотности на j 2 f :
dx(t )
j 2 f X ( f ) .
dt
Как и в случае сдвига, теоретически возможно выполнение дифференцирования сигнала с помощью ЛИС-цепи, имеющей КЧХ вида H ( f ) j 2 f
.
Пример 2.22. Рассмотрим амплитудно-частотную и фазочастотную характеристики идеального дифференциатора. АЧХ такой цепи, как модуль
КЧХ, является линейно растущей функцией частоты с крутизной 2 при
f 0 и линейно убывающей с крутизной 2 при f 0 . ФЧХ равна / 2
на положительных частотах и / 2 на отрицательных. Точная реализация
дифференциатора невозможна.
125
На праактике дл
ля прибли
ижённого
о диффереенцироваания нереедко прим
меняю
ют простую
ю RC-цеп
пь, показаанную наа рис. 2.29
9 и назывваемую ди
ифференц
цирую
ющей цепьью. Комплексная ччастотнаяя характер
ристика эттой цепи равна
H( f )
j 2 fR
RC
.
f
1 j 2 fRC
Видно,, что КЧХ диффееренцирую
ющей цепи в облласти низзких часттот
(коггда 2 fRC 1 ) бл
лизка к К
КЧХ идеал
льного ди
ифференцциатора, поэтому по
отноошению к низкочаастотным
м (длителььным мед
дленно мееняющим
мся81) сигн
налам эта RC-ц
цепь можеет исполььзоваться как дифф
ференциаттор. ◄
Рис. 2.299. Диффер
ренцирую
ющая RC-ццепь
6. Теоррема инт
тегрироваания.
Обратноой к теорееме дифф
ференциро
ования яв
вляется тееорема ин
нтегрироввания
t
x(t )ddt
1
X (0) ( f )
X(f )
.
2
j 2 f
(2.559)
Замети
им, что втторое слаггаемое оттсутствует, если сиигнал x(t ) имеет нун
ние (нулевую посстоянную
ю составлляющую), при этоом
левоое среднеее значен
X (00) 0 . Длля этого сл
лучая виддно, что идеальны
и
й интеграатор – это
о ЛИС-цеепь
с КЧ
ЧХ вида
H( f )
81
1
.
j 2 f
По сравнению с постоянной времени цеппи
RC
1
126
Примеер 2.23. Рассмотри
Р
им АЧХ и ФЧХ идеальног
и
го интегр
ратора. АмА
плиттудно-часстотная характери
х
истика таакой цепи имеет вид H ( f )
1
2 f
.
ФЧХ
Х равна / 2 на отрицатеельных частотах
ч
и / 2 на полож
жительны
ых.
Точная реали
изация ин
нтегрирую
ющей цеп
пи невозможна.
На праактике для прибли
ижённого интегрир
рования пприменяю
ют RC-цеп
пь,
покаазанную на рис. 2.30
2
и наазываемую
ю интегрирующейй цепью. КЧХ инттегриррующей цепи
ц
H( f )
1
f
1 j 2 fRC
в об
бласти вы
ысоких частот (когдда 2 fRC
C 1 ) бли
изка к КЧ
ЧХ идеалььного инттеграттора, поэттому по отношени
ию к выссокочасто
отным (бы
ыстро меняющимсся)
сигн
налам этаа RC-цепьь может и
использоваться как интеграттор. ◄
Рис. 2..30. Интеггрирующая RC-цеппь
Теорем
мы дифференцироования и интегрир
рования оказываю
ются полеезным
ми при наахождени
ии спектрральных плотносте
п
ей сигналлов, кото
орые мож
жно
пред
дставить линейны
ыми ком
мбинациями прои
изводных и/или интеграллов
фун
нкций, дляя которых
х спектрал
альные пл
лотности уже
у извесстны.
Примеер 2.24. Спектралльная пло
отность треугольн
т
ного имп
пульса x(t ) ,
рис.. 2.31, моожет бытьь легко н
найдена с использо
ованием ууже извесстной спеектралльной пллотности прямоугоольного импульса
и
а (2.24). В самом деле, трреуголльный им
мпульс мо
ожно расссматриватть, как реззультат иинтегриро
ования парры
разн
нополярны
ых импул
льсов пряямоугольной форм
мы s (t ) , спектральную плоотностть котороой на осн
новании ссвойства линейноссти преоббразовани
ия Фурьее и
теорремы сдви
ига можно сразу зааписать в виде
1
127
S( f ) A
A
sin( f / 2) j 2 f / 4
sin( f / 2) j 2 f / 4
e
A
e
f / 2
f / 2
sinn( f / 2) j f / 2
sin 2 ( f )
.
e
e j f / 2 j 2 A
f / 2
f
Примен
няя теореему интеггрировани
ия, получ
чаем спект
ктральную
ю плотноссть
треуугольногоо импульсса
A sin 2 ( f / 2)
X( f )
.◄
2 ( f / 2)2
Рис. 2.31.
2
Треуугольный
й импульсс и его прооизводнаяя
7. Теоррема моду
дуляции
Под модуляциеей здесь подразум
мевается умноженние сигнаала x(t ) на
комплексную
ю экспонеенциальнуую функц
цию e j 2 f0t . Спекктральнаяя плотноссть
прои
изведенияя находиттся непоссредственно:
x(t )e
j 2 f0 t j 2 ft
e
dt
x(t )e j 2 ( f f0 )t dt X ( f f 0 ) ,
j 2 f0t
X ( f f0 ) .
так что x(t )e
Отмети
им, что тееорема м
модуляции
и82 являеттся двойсственной по отнош
шению
ю к теорем
ме сдвига.
8. Теоррема свёр
ртки
82
Иноогда её назыввают теоремо
ой смещения,, подразумевая смещение спектральноой плотности по оси частоот.
1
128
x(t ) y (t ) X ( f )Y ( f ) ,
была фактически доказана в п. 2.8.5.
9. Теорема умножения
x(t ) y (t ) X ( f ) Y ( f )
справедлива в силу теоремы свёртки и свойства дуальности преобразования
Фурье.
Пример 2.25. На практике нередко применяется операция стробирования – умножения сигнала на импульс (обычно малой длительности, хотя это
не обязательно) или на временное окно заданной формы83. При этом спектральная плотность стробированного сигнала находится как свёртка спектральной плотности исходного сигнала и спектральной плотности стробирующего импульса (стро́ба). Двойственной по отношению к стробированию является полосовая фильтрация – умножение спектральной плотности входного
сигнала на КЧХ полосового фильтра. Естественно, при этом соответствующие временны́е функции подвергаются свёртке. ◄
10. Теорема сопряжения
Если комплексному сигналу x(t ) соответствует спектральная плотность X ( f ) , то для комплексно сопряжённого сигнала справедливо соответствие x* (t ) X * ( f ) :
*
*
j 2 ft
j 2 ( f )t
X * ( f ) .
x
(
t
)
e
dt
x
(
t
)
e
dt
11. Теорема обращения времени
83
Целью стробирования обычно является подавление помех, расположенных на временной оси вне носителя
стробирующего импульса
129
Обращение сигнала во времени означает перемену знака аргумента
(времени). Обозначим сигнал x(t ) , обращённый во времени, x _(t ) x( t ) .
Его спектральная плотность:
X( f )
x(t )e
j 2 ft
dt
x( )e j 2 f ( d )
x( )e j 2 ( f ) d X ( f ) ,
так что обращение временнóй оси в обычном временнóм описании сигнала
эквивалентно обращению оси частотной в его спектральном представлении:
x(t ) X ( f ) .
Рассмотренные свойства преобразования Фурье справедливы для произвольных комплексных сигналов ограниченной энергии. На практике часто
имеются дополнительные сведения о сигнале, которые позволяют упростить
решение задачи спектрального анализа с учётом частных свойств их спектральных плотностей.
Например, предположение о том, что сигнал x(t ) является вещественным, приводит к свойству сопряжённой (эрми́товой) симметрии спектральной плотности:
X ( f ) X * ( f ) ,
или, что равносильно, X ( f ) X ( f ) и arg X ( f ) arg X ( f ) . В самом деле,
*
*
j 2 ft
j 2 ft
X ( f ) x(t )e
dt x(t )e
dt x(t )e j 2 ( f )t dt .
Это обстоятельство следует учитывать при решении практических задач, так как в большинстве случаев рассматриваются именно вещественные
130
сигналы. В частности, такая симметрия спектра (спектральной плотности)
используется в технике связи: для уменьшения требуемой полосы пропускания канала связи применяются амплитудно-модулированные сигналы с одной боковой полосой (ОБП-сигналы), в спектре которых сохраняется лишь
одна половина (правая или левая) спектра модулирующего сигнала. Потери
информации при этом не происходит, т.к. вторая половина может быть восстановлена путём «зеркального отражения» относительно частоты несущего
колебания.
Если сигнал является вещественным и чётным, то его спектральная
плотность также вещественна и чётна:
X ( f ) X ( f ) .
Это утверждение следует из того, что обращение во времени не изменяет вещественного чётного сигнала, а следовательно, не влияет и на его спектральную плотность, которая должна, таким образом, быть инвариантной к обращению частоты, то есть вещественной и чётной.
Если сигнал является вещественным и нечётным, то его спектральная
плотность – мнимая и нечётная:
X ( f ) X ( f ) .
Действительно, обращение времени изменяет только знак нечётного сигнала, следовательно, его спектральная плотность также должна при обращении
частоты лишь менять знак (это следует из свойства линейности преобразования Фурье), но поскольку спектральная плотность вещественного сигнала
сопряжённо-симметрична, то отсюда вытекает, что её вещественная часть
равна нулю, то есть спектральная плотность является мнимой; её нечётность
следует из вещественности сигнала.
Спектральная плотность сигнала e j 2 f0t как «обычная функция» не
существует, так как e j 2 f0t не принадлежит пространству L2 ( , ) . В то же
131
время решение многих задач упрощается, если определить спектральную
плотность комплексной экспоненты в терминах теории обобщённых функций. Отыскание спектральной плотности сигнала e j 2 f0t может быть сведено
к нахождению прямого преобразования Фурье отрезка функции e j 2 f0t длительности и предельному переходу при . В том, что спектральная
плотность сигнала e j 2 f0t представляет собой сдвинутую -функцию (является сингулярной)84, легко убедиться, если найти сигнал, соответствующий
спектральной плотности ( f f 0 ) , через обратное преобразование Фурье:
( f f 0 )e
j 2 ft
df e j 2 f0t .
Спектральные плотности гармонических сигналов
cos(2 f 0t )
и
sin(2 f 0t ) легко находятся с использованием формул Эйлера:
cos(2 f0t )
1
( f f0 ) ( f f0 ) ,
2
sin(2 f0t )
1
( f f0 ) ( f f0 ) .
2j
Пример 2.26. Балансно-модулированное колебание (см. разд. 5) может
быть получено путём умножения модулирующего сигнала x(t ) на несущее
гармоническое колебание cos(2 f 0t ) . Спектральную плотность балансномодулированного сигнала можно найти, воспользовавшись теоремой умножения с учётом вида спектральной плотности косинусоидального колебания:
x(t )cos(2 f0t )
X ( f f0 ) X ( f f0 )
2
2
Тот же результат можно получить на основе теоремы модуляции и
свойства линейности преобразования Фурье. ◄
84
Singulus (лат.) – единственный; в названии отражается тот факт, что вся спектральная «масса» сосредоточена в одной точке частотной оси
132
Во многих задачах одновременно присутствуют периодические и непериодические сигналы. Для того, чтобы можно было пользоваться в таких
случаях общим математическим аппаратом интеграла Фурье, найдём спектральную плотность T -периодического сигнала, который можно записать в
виде ряда Фурье
x (t )
k
Ck e
j
2
kt
T
.
Учитывая линейность преобразования Фурье и зная спектральную
плотность комплексной экспоненциальной функции, можно записать спектральную плотность периодического сигнала в виде
X(f )
2
Ck f k
T
k
.
(2.60)
Таким образом, спектральная плотность периодического сигнала сингулярна, т.е. состоит из -функций, сосредоточенных на частотах, кратных
частоте повторения сигнала.
Заслуживает внимания интересный вопрос о связи вида сигнала со скоростью убывания его спектральной плотности. Эту связь можно, например,
проследить, применяя к -функции многократное интегрирование.
Спектральная плотность -функции, как было показано, постоянна,
т.е. не убывает с ростом частоты. Интегралом -функции является функция
Хэвисайда, содержащая скачок – разрыв первого рода. Из теоремы интегрирования следует, что её спектральная плотность должна убывать с ростом частоты со скоростью 1 / f . Такую же скорость убывания имеет спектральная
плотность любой функции, содержащей скачки, но не содержащей функций, в частности, спектральная плотность прямоугольного импульса
убывает с ростом частоты со скоростью 1 / f .
133
Треугоольный импульс
и
(рис. 2.3
32 а)
мож
жно пред
дставить интеграллом от пары
разн
нополярны
ых прямо
оугольны
ых импул
льсов,
рис.. 2.32 б, или дваж
жды прои
интегриро
ованным
м сигналоом, содерж
жащим рразнополяярные
-ф
функции, рис. 2.32 в. Спекттральная плотп
ностть треугоольного импульса
и
а убываетт поэтом
му со сккоростью
ю 1 / f 2 (см. Пр
ример
2.244). Отмети
им, что функция,
ф
описываю
ющая
треуугольный
й импульсс, непреры
ывна, но имеет рразры́вную
ю первую
ю произвводную. ВообВ
ще, функция, содержаащая хотяя бы один
н скачок произвоодной пор
рядка n , имеет спектралльную плотность со
с скоростью убыввания
не быстрее 1/ f n 1 . Спектрральная плотп
итической
й (бескон
нечно ди
иффеностть анали
Рис.2.32
Р
Трееугольный импульс,
и
егоо
первая и вторая прои
изводные
ренц
цируемой
й) функц
ции убыввает быстрее
люб
бой отриц
цательной
й степени
и частоты
ы. Всё ск
казанное справедл
ливо и для
д
огиб
бающей спектра
с
пеериодичееского сиггнала.
Примеер 2.27. Для
Д нахож
ждения спектраль
с
ьной плоттности гаауссовскоого
(коллокольногго) импу
ульса s (t ) Ae t
2
воспол
льзуемся приёмом
м, которы
ый
назы
ывается приведени
п
ием к поолному кввадрату. Спектралльная пло
отность ими
пулььса
2
S ( f ) A e t e j 2 ft ddt .
1
134
Прибавим к показателю экспоненты слагаемые
j f
2
и
j f
2
, после
чего приведём показатель экспоненты под интегралом к виду квадрата суммы:
2
S ( f ) A e t e j 2 ft dt A
j f
2
e t e j 2 ft e
2
j f
e
2
dt
j f
2 f 2
2
Ae
e t e j 2 ft e
2
dt
2 f 2
Ae
1
2
e
f
2 t j
12
2
2
d ( 2 t ) .
Используя табличный интеграл
e ( x a )
2
/2
dx 2 , получаем
2
S ( f ) Be f , где B A
, 2 / .
Таким образом, гауссовская функция сохраняет свою форму при преобразовании Фурье, хотя параметры A и B , и в общем случае различаются.
◄
2.9.3.
Корреляционно-спектральные характеристики
детерминированных сигналов
Многие цифровые системы связи являются синхронными. Это означает,
что для приёма каждой посылки приёмное устройство должно «знать» время
её начала и окончания. Однако передача сигнала по каналу связи всегда сопровождается задержкой, величина которой может изменяться со временем
под влиянием различных дестабилизирующих факторов. Кроме того, особенности некоторых каналов в принципе не позволяют заранее точно рассчитать
задержку сигнала (таковы, например, каналы мобильной связи, спутниковые
135
каналы и др.). Чтобы обеспечить правильный приём информационных посылок в таких системах, передающее устройство регулярно посылает в канал
связи особый сигнал, называемый синхронизирующим сигналом, или коротко
– синхросигналом. Приёмное устройство измеряет временнóе положение
синхросигнала и определяет моменты начала и окончания приёма очередной
информационной посылки. При выборе формы сигнала для применения его в
качестве синхронизирующего необходимо знать, насколько точно можно измерить его временное положение. Потенциальная точность измерения зависит от формы автокорреляционной функции сигнала, которая представляет
собой количественную меру сходства сигнала и его сдвинутой копии: чем
быстрее это сходство убывает с увеличением сдвига, тем точнее можно измерить временно́е положение сигнала. Полезной оказывается также другая
функция, называемая взаимно корреляционной, которая описывает сходство
двух различных сигналов в зависимости от их сдвига друг относительно друга.
Определение автокорреляционной и взаимно корреляционной функций, а также соответствующих им функций частоты, основано на обобщённой формуле Рэлея (2.25), согласно которой скалярное произведение двух детерминированных сигналов может быть найдено как во временной, так и в
частотной области:
( x, y )
*
x(t ) y (t )dt
X ( f )Y * ( f )df .
Подынтегральное выражение правой части этого равенства
Wxy ( f ) X ( f )Y * ( f )
называется взаимной спектральной плотностью сигналов x(t ) и y (t ) .
В частном случае при y (t ) x(t ) взаимная спектральная плотность превращается в энергетический спектр сигнала
136
2
Wx ( f ) X ( f ) .
Смысл энергетического спектра выясняется, если выразить энергию
сигнала через скалярное произведение
E x ( x, x )
*
X ( f ) X ( f )df
Wx ( f )df .
Таким образом, функция Wx ( f ) описывает распределение энергии сигнала
по частотной оси (поэтому правильнее было бы называть ее спектральной
плотностью энергии). Заметим, что в общем случае спектральная плотность
сигнала X ( f ) является комплексной функцией, аргумент которой теряется
при переходе от X ( f ) к Wx ( f ) , поэтому сигнал нельзя восстановить по его
энергетическому спектру.85
Взаимная спектральная плотность характеризует сходство сигналов в
том смысле, что интеграл от неё равен их скалярному произведению. В частности, для ортогональных сигналов взаимная спектральная плотность такова,
что при интегрировании даёт 0, то есть различные частотные составляющие
взаимной спектральной плотности ортогональных сигналов при интегрировании компенсируют друг друга.
Для энергетического спектра и взаимной спектральной плотности, как
функций частоты, можно определить при помощи обратного преобразования
Фурье соответствующие временны́е функции. Запишем вначале обратное
преобразование Фурье для взаимной спектральной плотности
Bxy ( )
Wxy ( f )e
j 2 f
df
X ( f )Y * ( f )e j 2 f df .
85
Заметим, что в некоторых частных случаях это можно сделать, если имеются дополнительные сведения,
например, о том, что X ( f ) есть вещественная функция – фактически это означает, что известна спектральная плотность фазы
137
Обозначим Y * ( f )e j 2 f Y * ( f ) , где Y ( f ) Y ( f )e j 2 f – спектральная плотность сигнала y (t ) y (t ) , равного сигналу y (t ) , задержанному на величину (см. теорему сдвига). Тогда согласно обобщённой формуле Рэлея
Bxy ( )
*
X ( f )Y ( f )df
x(t ) y* (t )dt ( x, y ) .
Полученная функция характеризует сходство сигнала x(t ) и сигнала
y (t ) y (t ) в зависимости от значения сдвига, и называется взаимно кор-
реляционной функцией (ВКФ) детерминированных сигналов x(t ) и y (t ) . Фактически это скалярное произведение первого сигнала и задержанного второго, рассматриваемое как функция задержки.
Аналогично функция
Bx ( )
Wx ( f )e
j 2 f
df
X ( f ) X * ( f )e j 2 f df
x(t ) x* (t )dt ( x, x ) ,
(2.61)
характеризующая сходство сигнала
x(t )
и его задержанной копии
x (t ) x (t ) , называется автокорреляционной функцией (АКФ) детерми-
нированного сигнала86.
АКФ обладает некоторыми свойствами, которые необходимо знать для
ее правильного использования.
1. Автокорреляционная функция достигает при 0 максимума, равного энергии сигнала:
Bx (0) max Bx ( ) E x .
86
(2.62)
Крайне важно не путать эту функцию с функцией автокорреляции случайного процесса (см. п.3.3)
138
Доказать это свойство легко при помощи неравенства Шварца.
2. Автокорреляционная функция обладает свойством сопряжённой симметрии:
Bx ( )
*
x(t ) x (t )dt
x( ) x* ( )d
*
*
x( ) x ( )d Bx* ( ) .
В частности, для вещественного сигнала АКФ – чётная функция.
Взаимно корреляционная функция указанными свойствами не обладает: например, для ортогональных сигналов она равна нулю при нулевом
сдвиге; в остальном ее форма определяется формами обоих сигналов.
Введённые функции играют важную роль, в частности, при выборе
сигналов для синхронизации систем связи, что иллюстрируется следующим
примером.
Пример 2.28. Измерение временнóго положения синхронизирующего
сигнала может производиться при помощи многоканального устройства,
структурная схема которого показана на рис. 2.33. Форма синхросигнала известна, поэтому в каждом канале формируется (генерируется) его копия,
имеющая некоторую задержку, фиксированную для данного канала. Все задержки образуют некоторый набор, перекрывающий диапазон возможных
задержек с достаточно малым шагом . Шаг выбирается исходя из требуемой точности измерения задержки tз , при этом для достижения большей
точности шаг необходимо уменьшать. Каждый канал содержит перемножитель наблюдаемого колебания и опорного сигнала (сдвинутой копии известного синхросигнала), а также интегратор. Таким образом, в каждом канале
вычисляется скалярное произведение – значение взаимно корреляционной
функции принятого сигнала x(t tз ) и копии синхросигнала, задержанной на
139
величину, кратную шагу . Число каналов n определяется диапазоном измеряемых задержек и величиной шага . Нетрудно видеть, что если на вход
схемы подать синхросигнал, то величины на выходах интеграторов будут отсчётами его АКФ, взятыми с интервалом .
С учётом 1-го свойства АКФ, если задержка з синхросигнала на входе
схемы составляет k , то на выходе k -го канала значение достигнет максимума и будет равно энергии сигнала. Устройство выбора максимума УВМ
вырабатывает оценку tз на основе номера канала, на выходе которого имеет
место максимальное значение скалярного произведения принятого и опорного сигналов; коротко это записывается в виде
tз arg max x(t tз ), x(t k ) ◄
k
Рис. 2.33. Измерение временнόго положения синхронизирующего сигнала
Если синхросигнал наблюдается на фоне помех (а это всегда так), то
выбор максимума может сопровождаться ошибкой, что приведёт к нарушению правильной работы системы связи (интервал, где будет производиться
приём полезного сигнала, будет смещён относительно интервала посылки,
что приведёт к его частичной или полной потере). Для повышения помехоустойчивости синхронизации АКФ синхросигнала должна быстро убывать с
ростом аргумента.
140
Пример 2.29. Автокорреляционная функция прямоугольного импульса
длительности и имеет вид треугольника, рис. 2.34.
B x ( )
- и
и
Рис. 2.34. АКФ прямоугольного импульса длительности и .
Максимальное значение АКФ равно A2 и , где A – амплитудное (максимальное) значение импульса. ◄
Пример 2.30. С точки зрения точности синхронизации выгодно использовать сигнал, который имеет «острую» (игольчатую) АКФ, близкую по
форме к -функции. Реальные сигналы с конечной шириной спектра к этому
идеалу могут только приближаться. Одним из хороших приближений является сигнал (последовательность, код) Баркера, состоящий из N разнополярных прямоугольных элементарных импульсов; пример такого сигнала при
N 5 показан на рис. 2.35, а.
A
Bx ( )
x (t )
t
0
2 0
5 0
3 0
а
0
0
3 0
б
Рис. 2.35. Сигнал Баркера ( N 5 ) и его АКФ
Отличительное свойство сигнала Баркера состоит в том, что его АКФ
(рис. 2.35, б) имеет «лепестковый» вид, причём ширина каждого лепестка
равна удвоенной длительности элементарного импульса, а уровни боковых
лепестков в N раз меньше, чем уровень главного лепестка (равный, очевид-
141
но,
N 0 A2 ). К сожалению, сигналы Баркера известны только для
N 3,4,5,7,11,13 . Таким образом, максимальное превышение главного лепестка над боковыми, которое определяет помехоустойчивость синхронизации87, для известных сигналов Баркера не превосходит 13. Для целей синхронизации в условиях сильных помех, когда требуется бо́льшее превышение,
используют так называемые псевдослучайные последовательности (ПСП).
Наиболее известны среди них m -последовательности, представляющие собой
последовательности
разнополярных
импульсов,
имеющие
длину
N 2m 1 при любом целом m (для них, однако, боковые лепестки АКФ могут быть лишь в
N раз меньше главного). ◄
Дискретизация сигналов. Теорема отсчётов
2.10.
Ранее было показано, что коэффициенты обобщённого ряда Фурье, составляющие спектр сигнала относительно данного полного ортонормального
базиса, вычисляются путём скалярного умножения этого сигнала на базисные
функции. Существует счётный базис, для которого эта операция эквивалентна измерению мгновенных значений (отсчётов) аналогового сигнала через
равные промежутки времени. Таким образом, аналоговый сигнал взаимно
однозначно представляется дискретной последовательностью своих отсчётов,
т.е. дискретным сигналом. Этот факт имеет огромное значение для современной техники, так как позволяет передавать непрерывные сообщения по
цифровым каналам связи, а также применять для обработки сигналов цифровые вычислительные устройства (в частности, цифровые сигнальные процессоры). Процесс преобразования аналогового сигнала в дискретный называется дискретизацией.
Следует сразу же отметить, что, как и базис Фурье, упомянутый базис не
обладает свойством полноты в пространстве L2 ( , ) , поэтому он непри87
Чем больше указанное превышение, тем меньше вероятность принять боковой лепесток за главный из-за
шумовых выбросов
142
годен для представления с заданной точностью любых аналоговых сигналов
ограниченной энергии, однако для подпространства сигналов, спектральная
плотность которых сосредоточена на конечном интервале частотной оси88,
этот счётный базис полон.
Условие финитности спектра не является слишком обременительным с
практической точки зрения, так как спектральные плотности всех сигналов
из L2 ( , ) при f быстро убывают89, поэтому их можно с любой
точностью аппроксимировать финитными функциями, приняв в качестве
носителя спектральной плотности достаточно широкий интервал частот.
Восстановление такого аналогового сигнала по его отсчётам возможно лишь
приближённо, но ошибку можно сделать как угодно малой. В качестве длины
частотного интервала – носителя спектральной плотности – можно принять
так называемую эффективную ширину спектра сигнала. Эффективной шириной спектра можно считать ширину частотного диапазона, в котором сосредоточена заданная доля (например, 99%) всей энергии сигнала90. Обычно
на практике перед дискретизацией сознательно ограничивают ширину спектра сигнала путём его предварительной фильтрации, так как это уменьшает
ошибку восстановления аналогового сигнала.
Возможность представления аналогового сигнала последовательностью
его отсчётов и условия применимости такого представления устанавливаются
теоремой отсчётов (теоремой Котельникова)91.
Рассмотрим аналоговый сигнал x(t ) , спектральная плотность которого
X ( f ) равна нулю вне конечного интервала Fв , Fв частотной оси. Тогда на
этом интервале спектральную плотность X ( f ) можно представить рядом
Фурье
88
Напомним, что функции, отличные от нуля на конечном интервале, называются финитными
См. по этому поводу п.2.9.2
90
Применяются и другие способы определения эффективной ширины спектра (см. Приложение 4)
91
Владимир Александрович Котельников (1908–2005) – выдающийся русский инженер и математик; доказал теорему отсчетов в 1933 г. Известны также варианты доказательства теоремы отсчётов, связанные с
именами Э. Уиттекера и Дж. Уиттекера (1916), К. Шеннона (1948) (см. подробный обзор [11])
89
143
X(f )
k
j
Ck e
2
kf
2 Fв
,
(2.63)
вполне аналогичным комплексному ряду Фурье (2.47), представляющему
временнýю функцию на интервале T 2, T 2 , с той очевидной разницей,
что базисные функции здесь зависят не от t , а от f . С учётом этого коэффициенты ряда находятся, как
1
Ck
2 Fв
Fв
j
X ( f )e
2
kf
2 Fв
df , k , .
(2.64)
Fв
Выразим сигнал x(t ) через его обратное преобразование Фурье, причём
в качестве пределов интеграла подставим Fв и Fв , поскольку вне этого интервала спектральная плотность равна нулю. Далее вместо функции X ( f )
подставим её представление рядом Фурье (2.63) и выполнив интегрирование,
получим
Fв
x(t )
X ( f )e j 2 ft df
Fв
k
Ck
k
Fв
cos
2
Fв
Fв
Ck
1
j 2 f t k
2 Fв
e
df
Fв
1
f t k
df
2 Fв
1
F
t
k
sin
2
в
2 Fв
.
Ck 2 Fв
1
k
2 Fв t k
2 Fв
(2.65)
Сравнивая выражение (2.64) для коэффициентов разложения спектральной плотности в ряд Фурье с формулой обратного преобразования Фурье, нетрудно видеть, что коэффициенты можно выразить через мгновенные значения (отсчёты) сигнала, взятые через равные промежутки времени:
144
1
Ck
2 Fв
Fв
j
X ( f )e
2
kf
2 Fв
Fв
1
df
2 Fв
Fв
X ( f )e j 2 ft df
Fв
t k
1
x k
2 Fв
.
2 Fв
1
2 Fв
(2.66)
Подставив (2.66) в (2.65) и введя обозначение для интервала (шага) дискретизации Td
x(t )
1
, запишем сигнал в виде ряда
2 Fв
x kTd
k
sin t kTd
Td
.
Td
t kTd
Заменив k на n , получим представление аналогового сигнала с финитной спектральной плотностью рядом Котельникова
x(t )
x nTd
n
sin t nTd
Td
.
Td
(2.67)
t nTd
Коэффициенты x nTd этого ряда представляют собой отсчёты (мгновенные значения) аналогового сигнала x(t ) , взятые через равные промежутки
времени Td
1
.
2 Fв
Базисные функции ряда Котельникова получаются из единственной
функции путём её сдвига на промежутки времени, кратные Td . Обозначим
эту исходную функцию 0 (t ) sin
Td
совокупность
n (t ), n , ,
t
Td
t ; базис представляет собой
n (t ) 0 (t nTd ) . Несколько базисных
145
функций показаны на рис. 2.36. Ряд Котельникова даёт возможность определения (интерполяции) значений сигнала x(t ) в любой точке временнóй оси
по известным значениям сигнала в дискретном множестве её точек (узлов
интерполяции). Следовательно, нет необходимости передавать или хранить
всё непрерывное множество (континуум) значений аналогового сигнала с
финитным спектром, достаточно передать (или зафиксировать на некотором
носителе)
счётную
последовательность
x[n] x nTd , n , ,
его
дискретных
отсчётов
по которым при необходимости сигнал может
быть в принципе восстановлен.
Рис. 2.36. Базисные функции ряда Котельникова
с номерами –1, 0, 3 и 5
Чтобы выяснить свойства полученного базиса, найдём скалярное произведение пары базисных функций. Из сравнения выражений (2.65) и (2.63) для
сигнала
и
его
спектральной
плотности
видно,
что
функция
1
2
sin 2 Fв t k
j
kf
F
2
в
2 Fв
имеет спектральную плотность, равную e
на
2 Fв
1
2 Fв t k
2 Fв
частотном интервале Fв , Fв и нулю вне него. Тогда согласно обобщённой
формуле Рэлея скалярное произведение k -й и m -й функций базиса Котельникова равно
( k , m )
1
Fв
4 Fв 2 F
в
j
e
2
( k m) f
2 Fв
df
1
km .
2 Fв
146
Таким образом, базис Котельникова ортогонален, но не нормирован. По
существу, базис Котельникова во временной области – это базис Фурье в
частотной области (ср. (2.63) и (2.65)). Поэтому свойства ортогональности
и полноты одинаково справедливы для этих базисов.
Чтобы восстановить (интерполировать) аналоговый сигнал по последовательности его отсчётов, необходимо просуммировать все базисные функции Котельникова при n , с весовыми коэффициентами, равными отсчётам x nTd . Технически эту операцию можно в принципе осуществить,
если на вход ЛИС-цепи с импульсной характеристикой, совпадающей с
функцией Котельникова 0 (t ) , подавать в моменты nTd , n , воздействия в виде -функций с «амплитудными» множителями x nTd , n , .
Иными словами, на вход такой цепи должен подаваться возбуждающий сиг
нал v(t )
n
x(nTd ) (t nTd ) . Откликом цепи на воздействие (t nTd ) яв-
ляется сдвинутая на nTd импульсная характеристика n (t ) 0 (t nTd ) . В
силу линейности и стационарности цепи откликом на воздействие v(t ) будет
правая часть выражения (2.67), равная восстановленному сигналу x(t ) .
Учитывая, что -функция имеет нулевую длительность, можно представить возбуждающий сигнал в виде
v(t )
n
где (t )
x(nTd ) (t nTd ) x(t )
(t nTd )
n
(t nTd ) x(t ) (t ) ,
(2.68)
– периодическая последовательность -функций.
n
Считая (нестрого!) -функцию «коротким импульсом», можно назвать сигнал v(t ) идеализированным сигналом с амплитудной импульсной модуляцией (иАИМ-сигналом). Поскольку иАИМ-сигнал равен произведению (2.68),
147
то его спектральная плотность равна свёртке спектральных плотностей сигналов x(t ) и (t ) .
Найдём спектральную плотность последовательности (t ) . Для этого
вначале запишем её в виде ряда Фурье
j
(t )
n
Sne
2
nt
Td
,
коэффициенты которого равны
Td /2
1
Sn
Td
(t )e
j
2
nt
Td
dt
Td /2
1
.
Td
Таким образом, (t ) представляет собой сумму бесконечного множества комплексных гармонических колебаний с одинаковыми амплитудами
1 / Td и с частотами, кратными величине 1 / Td . Поэтому спектральная плот-
ность последовательности (t ) имеет вид
1
( f )
Td
n
f
n
Td
.
Теперь найдём спектральную плотность иАИМ-сигнала как свёртку
n
X ( ) f T
d
n
1
d
Td
V( f )
1
Td
1
Td
1
X ( )
Td
X ( ) ( f )d
n
n
n
f
X(f
n
d
Td
n
)
Td
X ( f nFd ) .
148
Итак, спектральная плотность иАИМ-сигнала представляет собой с учётом масштабного коэффициента 1 Td сумму (суперпозицию) бесконечного
множества копий спектральной плотности аналогового сигнала x(t ) , отличающихся друг от друга сдвигами по оси частот, кратными частоте дискретизации Fd
1
2 Fв , рис. 2.37. (Спектральная плотность сигнала x(t ) показана
Td
условно в виде трапеции; следует также помнить, что спектральная плотность сигнала в общем случае является комплексной.)
V ( f ), H ( f )
Td
f
2 Fd
Fd
Fв
Fв
Fd
2 Fd
Рис. 2.37. Спектральная трактовка восстановления сигнала
Следовательно, для восстановления аналогового сигнала необходимо
подавить в спектре сигнала v(t ) все спектральные составляющие, не принадлежащие интервалу Fв , Fв , а остальную часть спектра умножить на Td .
Поэтому интерполирующий фильтр должен иметь П-образную (прямоугольную) комплексную частотную характеристику (на рис. 2.37 показана штриховой линией):
Fв f Fв ,
T ,
H( f ) d
0 в противном случае.
(2.69)
Легко убедиться, что идеальная интерполирующая цепь должна в таком
случае иметь импульсную характеристику h (t ) sin
Td
t
Td
t , совпада
ющую с базисной функцией 0 (t ) . Таким образом, спектральный подход к
149
восстановлению аналогового сигнала по его отсчётам приводит к тому же
выводу, что и временной.
На практике точному восстановлению аналогового сигнала по его отсчётам препятствуют несколько обстоятельств.
1. Идеальная интерполирующая цепь нереализуема, так как её импульсная характеристика имеет бесконечно большую протяжённость в области отрицательных времён. В принципе можно построить цепь, аппроксимирующую её с любой точностью, но при этом восстановленный сигнал будет получаться с задержкой (тем бóльшей, чем выше требуемая точность аппроксимации)92.
2. Нереализуемым является и сигнал, описываемый выражением (2.68),
т.к. в него входят -функции. На практике вместо них используются короткие93 импульсы.
Необходимо отметить, что выражение (2.68), описывающее процесс восстановления аналогового сигнала по его отсчётам, иногда неправильно связывают с процессом дискретизации сигнала. На самом деле сигнал
v(t ) x(t ) (t ) , определённый на непрерывной временной оси и принимающий бесконечно большие значения в моменты времени, кратные Td , никак
нельзя считать дискретным сигналом (напомним, что дискретный сигнал –
это последовательность чисел). Взятие одиночного отсчёта аналогового сигнала (измерение его мгновенного значения) в произвольный момент времени
t0 описывается выражением типа свёртки
x(t0 )
x(t ) (t t0 )dt
x(t ) (t0 t )dt ,
(2.70)
а не умножения, как в (2.68).
92
93
Сложность цепи при этом также возрастает
Здесь импульс считается коротким, если его длительность много меньше интервала
Td
150
Практически взятие отсчёта производится устройством, в котором выполняется свёртка аналогового сигнала не с -функцией, как в выражении
(2.70), а с некоторым реальным импульсом d (t ) . Этот импульс должен быть
«похож» на -функцию в том смысле, что он должен быть коротким и иметь
единичную площадь. Для простоты примем в качестве d (t ) прямоугольный
импульс длительности и амплитуды 1 / . Свёртке сигнала x(t ) с таким
импульсом соответствует умножение спектральной плотности X ( f ) на
спектральную плотность D( f ) прямоугольного импульса d (t ) , имеющую,
как известно, форму функции вида sin x / x , поэтому при использовании реального импульса конечной длины всегда происходит искажение спектральной плотности, а значит и формы сигнала. Для уменьшения такого искажения
необходимо стремиться к уменьшению длительности импульса d (t ) , при
этом форма импульса не играет заметной роли, важно лишь, чтобы его спектральная плотность равнялась единице на нулевой частоте.
3. Все реальные сигналы имеют конечную длительность, а спектральная
плотность финитного сигнала не может быть финитной (это одно из фундаментальных свойств преобразования Фурье). Нефинитность спектральной
плотности приводит к тому, что «хвосты» её копий при периодическом повторении накладываются друг на друга и суммируются, приводя к необратимому искажению спектра, а значит, и сигнала94. Применяемое до дискретизации ограничение полосы частот сигнала при помощи фильтра нижних
частот с характеристикой, близкой к прямоугольной («противоподменного»
фильтра), подавляет эти «хвосты». Противоподменная фильтрация искажает
сигнал до дискретизации, но зато уменьшает практически вдвое мощность
(или энергию) ошибки интерполяции.
Итак, точному восстановлению аналогового сигнала по последовательности его отсчётов препятствуют:
94
Это явление называется подменой частот (маскировкой частот); в англоязычной литературе используется название aliasing
151
конечная длительность любого реального сигнала и, как следствие,
бесконечная ширина его спектра;
конечная длительность реального стробирующего импульса и, как
следствие, искажение формы спектра сигнала при дискретизации;
невозможность точно реализовать интерполирующий фильтр.
Несмотря на эти ограничения, дискретизация широко применяется на
практике, в частности, при передаче непрерывных сообщений по цифровым
каналам; кроме того, она является необходимой частью цифровой обработки
сигналов.
Аналитический сигнал
2.11.
В теории электрических цепей используется представление гармонических колебаний векторами (метод комплексных амплитуд). Гармоническое
колебание U m cos(2 ft ) рассматривается как вещественная часть комплексной функции U me j (2 ft ) , которая изображается вектором на комплексной плоскости, вращающимся против часовой стрелки с постоянной угловой скоростью 2 f ; при этом вектор имеет длину U m и при t 0 составляет с вещественной осью комплексной плоскости угол . Проекция
конца вектора на вещественную ось изменяется по закону U m cos(2 ft ) .
Достоинством метода комплексных амплитуд является его наглядность и
простота.
Аналогичное представление можно ввести для сигнала произвольной
формы
x(t ) Re{z (t )} ,
где z (t ) x(t ) jxˆ (t ) – комплексное колебание (аналитический сигнал), мнимая часть которого xˆ (t ) должна однозначно определяться исходным сигналом x(t ) .
Заметим, что для гармонического колебания справедливо равенство
152
e j 2 ft e j 2 ft
cos(2 ft )
,
2
то есть переход от гармонического колебания U m cos(2 ft ) к его комплексному представлению U me j (2 ft ) можно выполнить путём отбрасывания составляющей с отрицательной частотой и умножения оставшегося слагаемого на 2. Поскольку колебание произвольной формы можно представить
суперпозицией гармонических колебаний (в форме ряда или интеграла
Фурье), следовательно, для любого сигнала x(t ) переход к его комплексному
представлению z (t ) должен сводиться к тем же операциям – подавлению
спектральных составляющих с отрицательными частотами и удвоению
остальных.
Таким образом, преобразование произвольного вещественного сигнала
x(t ) в аналитический сигнал z (t ) эквивалентно его прохождению через ЛИСцепь с комплексной частотной характеристикой95
2, f 0,
Hа( f )
0, f 0,
(2.71)
(рис. 2.39, а). Поскольку вещественная часть аналитического сигнала есть исходный сигнал x(t ) , то это преобразование можно также представить схемой
рис. 2.39, б, где мнимая часть xˆ (t ) аналитического сигнала формируется из
x(t ) фильтром с КЧХ H г ( f ) . Выясним, каким должен быть вид функции
H г ( f ) , чтобы схемы рис. 2.39,а и 2.39,б формировали один и тот же ком-
плексный сигнал z (t ) .
Рассматривая спектральные представления исходного и аналитического сигналов X ( f ) и Z ( f ) X ( f ) jXˆ ( f ) совместно с выражением (2.71),
видим, что на отрицательной полуоси частот мнимая часть Z ( f ) должна
95
Поведение КЧХ при f 0 выяснится позже
153
скомпенсировать вещественную, а на положительной – удвоить её. Следовательно, необходимо выполнение условий
jXˆ ( f ) X ( f ) при f 0,
jXˆ ( f ) X ( f ) при f 0,
(2.72)
которые можно переписать в форме
Xˆ ( f ) jX ( f ) при f 0,
Xˆ ( f ) jX ( f ) при f 0.
(2.73)
Отсюда следует, что мнимая часть xˆ (t ) аналитического сигнала может
быть получена воздействием исходного сигнала x(t ) на фильтр – преобразователь Гильберта с комплексной частотной характеристикой
j , f 0,
Hг ( f )
j , f 0.
x (t )
Ha ( f )
(2.74)
z (t )
x (t )
x (t )
xˆ (t )
Hг ( f )
а
б
Рис. 2.39. Преобразование вещественного сигнала в аналитический сигнал
АЧХ такого фильтра постоянна и равна 1 (всюду, за исключением точки
f 0 ), а его ФЧХ равна / 2 в области положительных частот и / 2 при
отрицательных частотах, рис. 2.40.
Найдём импульсную характеристику преобразователя Гильберта. Непосредственное определение обратного преобразования Фурье невозможно, т.к.
КЧХ представляет собой неинтегрируемую функцию. Представим АЧХ пределом H Г ( f ) lim e
0
f
функции, спадающей при увеличении модуля ча-
стоты экспоненциально с параметром , тогда
154
hг (t )
H Г ( f )e
j 2 ft
df
0
0
lim
f
je
e
j 2 ft
df liim je f e j 2 ft df
d
0
0
0
( j 2 t ) f
( j 2 t ) f
lim j e
df j e
df
0
0
1
e( j 2 t ) f
lim j
0 j 2 t
0
1
e( j 2 t ) f
j 2 t
0
1
1
1
lim j
.
0 j 2 t j 2 t t
Получеенная имп
пульсная характер
ристика показана нна рис. 2.4
41. Очеви
идно, ф
фильтр Гильберта физическки не реал
лизуем.
Рис. 2.40.
2
АЧХ и ФЧХ прееобразоватееля Гильбеерта
С-цепью, то выход
дной сигн
нал
Посколльку x(t ) преобраззуется в xˆ (t ) ЛИС
мож
жно записать как сввёртку xˆ (t ) x(t ) hг (t )
x( )hг (t )d , илли
1
155
xˆ (t )
1
x( )
d .
t
(2.75)
Сравнивая (2.72) и (2.73), можно видеть, что x(t ) xˆ (t ) hг (t ) , или
x(t )
1
xˆ ( )
1
d
t
xˆ ( )
t d .
(2.76)
Выражения (2.75) и (2.76) представляют собой прямое и обратное преобразования Гильберта (см. пример 2.16). Выражение (2.76) можно понимать
как интегральное представление сигнала x(t ) спектральной плотностью xˆ ( )
относительно ядра
1
, а (2.75) – как формулу для нахождения спек ( t )
тральной плотности. Ядро преобразования Гильберта является самосопряженным.
hг (t )
t
Рис. 2.41. Импульсная характеристика преобразователя Гильберта
Ввиду важности преобразования Гильберта для техники связи приведём его основные свойства. Напомним, что самосопряжённое ядро является
непрерывным аналогом ортонормального базиса, поэтому выполняется
обобщённая формула Рэлея
1. ( xˆ , yˆ ) ( x, y ) ,
и, в частности, равенство Парсеваля
2. ( xˆ , xˆ ) ( x, x ) .
Преобразование Гильберта, таким образом, сохраняет энергию сигнала
(что естественно, поскольку фильтр Гильберта имеет АЧХ, тождественно
156
равную 1). Более того, сохраняется энергетический спектр сигнала, а значит,
и АКФ:
3. Wxˆ ( f ) Wx ( f ) ,
4. Rxˆ ( ) Rx ( ) .
5. Если x(t ) – вещественный сигнал, то x(t ) и xˆ (t ) ортогональны. Действительно,
( x, xˆ )
X ( f ) Xˆ ( f )df [в соответствии с (2.73)]
0
j
X ( f ) X ( f ) df j X ( f ) X ( f ) df 0 ,
0
поскольку подынтегральное выражение представляет собой чётную функцию
– энергетический спектр вещественного сигнала.
6. Если x(t ) =const, то xˆ (t ) 0 в силу нечётности функции hг (t ) . Таким
образом, при f 0 функции, заданные выражениями (2.71) и (2.74),
должны быть доопределены следующим образом:
2, f 0,
H а ( f ) 1, f 0,
0, f 0,
j , f 0,
H г ( f ) 0, f 0,
j , f 0.
Аналитический сигнал можно записать в показательной (полярной)
форме z (t ) A(t )e j(t ) , где функция (t ) описывает изменение во времени
углового положения вектора на комплексной плоскости, т.е. фазы. Производная фазы по времени называется (круговой) мгновенной частотой и
определяется выражением
157
d (t ) d
Imln z (t ) .
dt
dt
Тогда циклическая мгновенная частота
z '(t )
1
d
1
f (t )
Im ln z (t )
Im
2
dt
2
z (t )
x '(t ) jxˆ '(t ) x(t ) jxˆ (t )
1
Im
2
2
2
ˆ
x
(
t
)
x
(
t
)
1 xˆ '(t ) x (t ) x '(t ) xˆ (t )
.
2
x 2 (t ) xˆ 2 (t )
Понятие аналитического сигнала оказывается полезным при описании
узкополосных сигналов, для которых спектральная плотность аналитического
сигнала Z ( f ) в основном сосредоточена около некоторой центральной частоты F0 , рис. 2.42. В частности, узкополосными являются сигналы, полученные путем модуляции гармонических несущих колебаний. Для узкополосного сигнала функция A(t ) (модуль аналитического сигнала) имеет смысл
огибающей, а фаза (t ) 2 F0t (t ) складывается из линейно растущего со
временем слагаемого 2 F0t и медленно96 меняющейся начальной фазы (t ) .
Z( f )
F0
f
Рис. 2.42. К понятию узкополосного сигнала
Согласно теореме модуляции (см. п. 2.9.2), умножение произвольного
сигнала на комплексную экспоненту e j 2 f0t эквивалентно сдвигу его спектральной плотности вправо на величину
96
f0 .
Сдвинем спектральную плот-
в сравнении с колебанием частоты F0
158
ность Z ( f ) , сосредоточенную около частоты F0 , рис. 2.42, влево на величину
F0 , тогда получится колебание
(t ) z (t )e j 2 F0t
со спектральной плотностью ( f ) Z ( f F0 ) , рис. 2.43. Колебание (t ) ,
очевидно, является низкочастотным (в том смысле, что его спектральная
плотность сосредоточена около нулевой частоты) и в общем случае комплексным. Можно считать, что аналитический сигнал z (t ) получен модуляцией несущего гармонического колебания с частотой F0 комплексным колебанием (t ) , которое поэтому называется комплексной огибающей. Комплексную огибающую (t ) A(t )e j (t ) можно представить в виде векторной
диаграммы, см. рис. 2.44.
( f )
f
Рис. 2.43. Спектральная плотность комплексной огибающей узкополосного сигнала
Длина вектора, представляющего комплексную огибающую, медленно
меняется в соответствии с функцией A(t ) . Угол между вектором и вещественной осью комплексной плоскости медленно меняется в соответствии с
функцией (t ) . Аналогичное векторное представление аналитического сигнала отличается тем, что вектор дополнительно вращается против часовой
стрелки с угловой скоростью (круговой частотой) 2 F0 . Таким образом, узкополосный сигнал x(t ) представляется гармоническим колебанием, модулированным по амплитуде и фазе соответственно «медленными» функциями
A(t ) и (t ) :
x(t ) A(t )cos 2 F0t (t ) A(t )cos (t ) .
(2.77)
159
Im
A(t )
(t )
Re
Рис. 2.44. Векторная диаграмма комплексной огибающей узкополосного сигнала
Очевидно, A(t ) x 2 (t ) xˆ 2 (t ) , (t ) arg x(t ) jxˆ (t ) .
Комплексная огибающая представляет собой сумму двух медленно меняющихся слагаемых (t ) u (t ) jv(t ) ; исходный сигнал можно представить
в виде
x (t ) Re (t )e j 2 F0t Re u (t ) jv (t ) cos(2 F0t ) j sin(2 F0t )
u (t ) cos(2 F0t ) v (t )sin(2 F0t ) .
(2.78)
Колебание u (t ) называется синфазной, а v(t ) – квадратурной составляющей (компонентой) узкополосного сигнала x(t ) . Вместе две эти функции
называются квадратурными компонентами. Отметим, что по известным
квадратурным компонентам и частоте F0 формула (2.78) позволяет точно
восстановить исходный сигнал x(t ) , поэтому вся информация, содержащаяся
в сигнале, сохраняется в паре его квадратурных составляющих. Именно это
даёт основание заменять узкополосный сигнал его комплексной огибающей
(или, что эквивалентно, парой квадратурных компонент) тогда, когда это
удобно с точки зрения решаемой задачи.
В частности, такая замена может быть очень эффективной при дискретизации узкополосного сигнала. С информационной точки зрения вместо узкополосного сигнала можно передавать его квадратурные компоненты
(предполагается, что частота F0 известна). Поэтому частота дискретизации
должна выбираться так, чтобы по отсчётам можно было восстановить низко-
160
частотные квадратурные компоненты, т.е. дискретизация узкополосного сигнала может производиться с частотой, вдвое превышающей верхнюю частоту
в спектре комплексной огибающей, а не самого сигнала. Например, если сигнал занимает полосу частот от 990 кГц до 1 МГц, то частоту дискретизации
достаточно выбрать равной 10 кГц, в то время как без учёта рассмотренных в
этом разделе понятий частота дискретизации сигнала должна быть более 2
МГц. Требования к частоте дискретизации имеют жизненно важное значение
при разработке цифровых систем связи, так как этим определяются сложность и стоимость системы, а иногда и ее принципиальная реализуемость.
Детали представления узкополосного сигнала отсчётами его квадратурных
составляющих будут рассмотрены в следующем подразделе.
Синфазная компонента может быть найдена следующим образом:
u (t ) Re (t ) Re z (t )e j 2 F0t
Re x(t ) jxˆ (t ) cos(2 F0t ) j sin(2 F0t )
x(t ) cos(2 F0t ) xˆ (t )sin(2 F0t ) .
Аналогично можно найти квадратурную компоненту
v(t ) Im (t ) xˆ (t )cos(2 F0t ) x(t )sin(2 F0t ) .
Таким образом, чтобы найти квадратурные компоненты сигнала x(t ) ,
нужно вначале определить сопряжённый по Гильберту сигнал xˆ (t ) . Есть и
другой способ определения квадратурных компонент, более простой с практической точки зрения и реализуемый схемой, показанной на рис. 2.45. Покажем, что приведённая схема действительно выделяет квадратурные компоненты (с точностью до амплитудного множителя). В соответствии с выражением (2.78)
x(t )cos(2 F0t ) u(t )cos2 (2 F0t ) v(t )sin(2 F0t )cos(2 F0t )
u (t )
(1 cos(2 2 F0t ))
sin(2 2 F0t )
u (t )
v(t )
ФНЧ
.
2
2
2
161
(Здесь символ
ФНЧ означает фильтрацию нижних частот, т.е. подавление
составляющих высоких частот, имеющих порядок F0 и выше).
Аналогично
x(t )sin(2 F0t ) u(t )cos(2 F0t )sin(2 F0t ) v(t )sin 2 (2 F0t )
u (t )
sin(2 2 F0t )
1 cos(2 2 F0t )
v(t )
v(t )
ФНЧ
.
2
2
2
Отметим, что опорные колебания в этой схеме различаются лишь фазовым
сдвигом / 2 , поэтому на практике они обычно вырабатываются одним генератором, а фазовый сдвиг обеспечивается фазовращателем. Значение квадратурных компонент для практики иллюстрируется следующими примерами.
Рис. 2.45. Выделение квадратурных компонент узкополосного сигнала
Пример 2.31. Предположим, что рассматриваемый узкополосный сигнал x(t ) представляет собой амплитудно-модулированное колебание, тогда
вектор, изображающий комплексную огибающую, изменяется только по
длине (норме), угловое же его положение определяется начальной фазой несущего колебания и остаётся неизменным. Начало отсчёта начальной фазы
сигнала (и тем самым положение вещественной оси на комплексной плоскости) фактически определяется начальной фазой опорного колебания в канале
выделения синфазной компоненты, поэтому если начальная фаза несущего
колебания известна, можно генерировать опорное колебание с такой же
начальной фазой и тем самым обеспечить синфазность (когерентность) несущего и опорного колебаний. Тогда вектор, изображающий комплексную
162
огибающую, будет направлен вдоль вещественной оси комплексной плоскости, и квадратурная компонента всегда будет равна нулю. Квадратурный канал схемы, показанной на рис. 2.45, оказывается ненужным. На выходе синфазного канала наблюдается колебание u (t ) / 2 , пропорциональное закону
изменения огибающей, т.е. закону модуляции. Таким образом, синфазная
часть схемы может использоваться при указанных условиях для демодуляции
(детектирования) АМ-колебаний и называется в таких случаях синхронным
(когерентным) детектором. ◄
Пример 2.32. Предположим теперь, что узкополосный сигнал x(t )
представляет собой колебание с фазовой модуляцией (ФМ-сигнал), тогда вектор, изображающий комплексную огибающую, имеет постоянную длину, а
его угловое положение медленно меняется по закону модуляции фазы. Если
изменения угла невелики (индекс модуляции мал), синфазная компонента меняется в небольших пределах и может считаться приближённо постоянной, а
синфазный канал можно исключить из схемы. Квадратурная составляющая,
напротив, меняется заметно и при условии малости индекса приближённо
пропорциональна изменениям угла, т.е. закону фазовой модуляции. Квадратурная часть схемы представляет собой синхронный детектор, в котором
опорное колебание сдвинуто по фазе на 90º относительно несущего колебания; такое устройство применяется для синхронного детектирования ФМколебаний (подробнее см. разд. 5). ◄
В заключение следует отметить, что аналитический сигнал представляет собой удобную математическую абстракцию. Реальные сигналы представляют собой вещественные функции. Это справедливо и для квадратурных
компонент, которые лишь интерпретируются как вещественная и мнимая
части комплексной огибающей узкополосного сигнала.
163
22.12.
Д
Дискрети
изация уззкополосн
ных сигн
налов
Одно из
и важней
йших прееимущесттв аналиттическогоо сигналаа – возмоожностть сведéн
ния узкоп
полосногоо сигнала к сигн
налу низккочастотн
ному, т.е.. к
комплексной
й огибающ
щей. Благгодаря эттому, в частности,, достигается знач
чиномия вычислителльных рессурсов пр
ри дискреетизации узкополоостелььная экон
ныхх аналоговвых сигнаалов.
Пусть веществеенный си
игнал x(t ) имеет спектраль
с
ьную пло
отность, сос
сред
доточеннуую в интеервалах F2 , F1 и F1, F2 и качесственно показанну
п
ую
на ррис. 2.46. Тогда спектраль
с
ьная плоттность Z ( f ) аналлитическо
ого сигнаала
ична от нууля толькко в полоссе частотт F1, F2 . Выберем
мв
z (t ) x (t ) jjxˆ (t ) отли
качеестве сред
дней часттоты сигн
нала сред
днее ариф
фметическкое F0 F1 F2 / 2
j 2 F0t
и ввведём ком
мплексную
ю огибаю
ющую (tt ) z (t )e
соо спектрал
льной плоот-
носттью
( f ) Z ( f F0 ) ,
ссосредото
оченной
в
полоосе
Fв , Fв ,
г
где
Fв F2 F1 / 2 . Так
ким образзом мы получили
и комплеексный си
игнал (t ) ,
имеющий фи
инитную спектралльную пл
лотность, т.е. удоввлетворяю
ющий усллом теоремы
ы отсчёто
ов. Поэтом
му сразу можно зааписать ряяд Котелььникова
виям
Рис. 2.446. К дискретизаци
ии узкопо
олосного сигнала
(t )
nTTd
n
sin t nTd
,
Td
Td
t nTd
где Td 1 / 2 Fв 1 / F2 F1 . Частота дискрети
изации коомплексн
ной огибаающей
й Fd 1 / Td F2 F1 мож
жет быть на неско
олько поррядков меньше, чем
1
164
частота дискретизации исходного сигнала 2F2 , выбранная согласно теореме
отсчётов без учёта его узкополосности.
Аналитический сигнал можно выразить через комплексную огибающую как
z (t ) (t )e
j 2 F0t
nTd
n
sin t nTd
Td
e j 2 F0t .
Td
t nTd
Тогда исходный сигнал
sin t nTd
Td
j 2 F0t
e
x(t ) Re z (t ) Re nTd
.
n
t nTd
Td
Заменяя комплексную огибающую её представлением через квадратурные компоненты, получим
sin t nTd
Td
j 2 F0t
x(t ) Re u nTd jv nTd
e
n
t nTd
Td
Re u nTd jv nTd cos 2 F0t j sin 2 F0t
n
sin t nTd
T
d
t nTd
Td
sin
t
nT
d
Td
.
u nTd cos 2 F0t v nTd sin 2 F0t
n
t nTd
Td
165
Перепишем полученное выражение в форме
sin
t
nT
d
T
d
cos 2 F t
x(t ) u nTd
0
n
t nTd
Td
sin
t
nT
d
Td
sin 2 F t ,
v nTd
0
n
t nTd
Td
(2.79)
показывающей, что исходный аналоговый узкополосный сигнал может быть
точно восстановлен по отсчётам его квадратурных компонент, взятым с шагом Td 1 / F2 F1 , определяемым не верхней частотой в спектре сигнала, а
шириной его спектра. Этот факт имеет фундаментальное значение для цифровой обработки модулированных сигналов, т.к. позволяет существенно
ослабить требования к быстродействию и объёму памяти обрабатывающих
устройств. Средняя частота сигнала F0 F1 F2 / 2 не влияет на шаг дискретизации, но для восстановления сигнала она должна быть известна.
Выражение (2.79) описывает представление узкополосного сигнала в
виде ряда, т.е. линейной комбинации базисных функций, каждая из которых
представляет собой радиоимпульс с несущей частотой, равной средней частоте сигнала F0 F1 F2 / 2 , а огибающая радиоимпульса совпадает с соответствующей функцией Котельникова n (t ) 0 (t nTd ) , n , . Для
восстановления исходного сигнала теоретически требуются два полосовых
фильтра с одинаковой П-образной АЧХ, полосой пропускания
F1, F2
и
ФЧХ, различающимися на / 2 . На входы этих фильтров должны поступать
периодические последовательности коротких импульсов (в идеале функций), промодулированные отсчётами квадратурных составляющих, а
отклики фильтров должны суммироваться.
166
Применение на практике выражения (2.79) означает, что для дискретизации узкополосного сигнала его вначале нужно перенести в область низких
частот (т.е. выделить квадратурные компоненты, например, с помощью схемы рис. 2.38), а затем взять отсчёты квадратурных компонент с шагом
Td 1 / F2 F1 . Однако существует другой способ дискретизации, не требующий переноса спектра, когда периодически берутся пары отсчётов исходного высокочастотного (узкополосного) сигнала, причём отсчёты в паре
должны быть сдвинуты по времени друг относительно друга на величину
1 / 4F0 ,
то
есть
на
четверть
периода
колебания
средней
частоты
F0 F1 F2 / 2 .
Вернёмся к выражению (2.78):
x(t ) u (t ) cos(2 F0t ) v(t ) sin(2 F0t ) .
(2.80)
Умножим сигнал на колебание cos(2 F0t ) и подставим nTd вместо t :
1 1
x(nTd )cos(2 F0nTd ) u (nTd ) cos(4 F0nTd )
2 2
1
v(nTd ) sin(4 F0nTd ) .
2
Вспомним, что F0 F1 F2 / 2 , а Td 1 / F2 F1 . Тогда
F F2 n
x nTd cos 2 1
2
F
F
2
1
1 1
F F n
u nTd cos 4 1 2
F
F
2
2
2
2
1
F F2 n
1
v nTd sin 4 1
.
F
F
2
2
2
1
Обозначим
F1 F2
l , тогда
F2 F1
1
1 1
x nTd cos nl u nTd cos 2 nl v nTd sin 2 nl .
2
2 2
167
Потребуем, чтобы
F1 F2
l было целым и чётным. Тогда cos nl 1
F2 F1
, sin 2 nl 0 , откуда следует, что u nTd x nTd , т.е. отсчёты синфазной
компоненты в точности совпадают с отсчётами самого́ узкополосного сигнала.
Умножив (2.80) на sin(2 F0t ) , получим
x(t )sin(2 F0t ) u(t )sin(2 F0t )cos(2 F0t ) v(t )sin 2 (2 F0t ) .
Подставив вместо t значение nTd
1
F F2
и учтя равенства 1
l,
4 F0
F2 F1
F0 F1 F2 / 2 , получим
1
1
1
x nTd
sin nl u nTd
sin 2 nl
F
F
4
2
2
4
0
0
1 1 1
v nTd
cos 2 nl .
4 F0 2 2
С учётом чётности l можно записать
1
1
v nTd
x nTd
.
F
F
4
4
0
0
Таким образом, отсчёты исходного сигнала, взятые с задержкой (относительно моментов времени nTd ) на четверть периода колебания средней частоты, равны отсчётам квадратурной компоненты, задержанным на такую же
величину 1 / 4F0 ). Но поскольку квадратурная компонента представляет собой функцию, изменяющуюся значительно медленнее, чем колебание средней частоты (несущее колебание), то можно считать справедливым приближённое равенство
1
v nTd x nTd
.
F
4
0
Отсюда следует, что при восстановлении узкополосного сигнала согласно (2.79) можно вместо отсчётов квадратурной компоненты использовать
168
отсчёты самого сигнала, взятые с задержкой на четверть периода колебания
средней частоты, при этом ошибка будет тем меньше, чем «узкополоснее»
сигнал, т.е. чем медленнее меняются квадратурные компоненты.
Итак, узкополосный сигнал в соответствии с выражением (2.79) может
быть восстановлен теоретически точно по отсчётам его квадратурных компонент, взятых одновременно в моменты nTd , или приближённо по парам
отсчётов самого сигнала, взятым в моменты nTd и nTd 1 / 4 F0 соответственно.
Контрольные вопросы
1. Какие преимущества даёт рассмотрение сигналов как элементов векторного пространства?
2. Какие сигналы называются ортогональными?
3. Что можно сказать о сигналах x и y , если ( x, y) x 2 y 2 ?
4. В чем состоит практический смысл требования полноты базиса?
5. Что такое явление Гиббса и в чем его причина?
6. Сформулируйте принцип суперпозиции.
7. Запишите выражение, описывающее произвольный линейный оператор, действующий в пространстве L2 ( , ) .
8. Запишите выражение, описывающее линейный инвариантный к сдвигу
(стационарный) оператор, действующий в пространстве L2 ( , ) .
9. Чем объясняется особая роль ряда и интеграла Фурье в анализе сигналов и цепей?
10. Что такое импульсная характеристика ЛИС-цепи? Можно ли её измерить точно? приближённо? Как это сделать?
11. Что такое комплексная частотная характеристика ЛИС-цепи? Можно
ли её измерить (точно, приближённо)? Как это сделать?
12. Что такое автокорреляционная функция детерминированного сигнала?
Что она характеризует?
169
13. Что такое взаимно-корреляционная функция детерминированных сигналов? Что она характеризует?
14. Как связаны ВКФ и скалярное произведение детерминированных сигналов?
15. Как теоретически можно восстановить аналоговый сигнал по последовательности его отсчётов?
16. Что препятствует на практике точному восстановлению аналогового
сигнала по последовательности его отсчётов?
17. Для чего частоту дискретизации на практике выбирают больше удвоенной частоты Найквиста (верхней частоты Fв спектра сигнала)?
18. Для чего перед дискретизацией аналоговый сигнал подвергают НЧфильтрации?
19. Что такое аналитический сигнал? Как связаны вещественный сигнал и
соответствующий ему аналитический сигнал?
20. Почему нереализуем фильтр Гильберта?
Упражнения
1. Докажите линейную независимость функций, упомянутых в примере 2.1.
2. Покажите, что для пространства из примера 2.1 совокупность функций
V4 v1(t ) 1, v2 (t ) 1 t , v3 (t ) 1 t t 2 , v4 (t ) 1 t t 2 t 3
может
служить базисом.
3. Рассчитайте первые 8 функций Уолша согласно рекуррентным выражениям примера 2.11 и постройте их графики (выполните это задание
для функций Уолша, заданных на интервалах (-0,5; 0,5) и (0; 1)). Сравните полученные результаты.
4. Запишите обобщённую формулу Рэлея для пространств L2 и l2 .
170
5. На основе множества линейно независимых степенных функций
S4 v0 (t ) 1, v1(t ) t , v2 (t ) t 2 , v3 (t ) t 3 , где t 1,1 , постройте ортонормальный базис, начиная с функции v0 (t ) . Постройте ортонормальный базис, используя функции в обратном порядке. Сравните полученные базисы.
6. Докажите свойство самосопряжённости ядра u( f , t ) e j 2 ft .
7. Докажите коммутативность свёртки.
8. Докажите свойство дуальности (2.56) преобразования Фурье.
9. Докажите теорему о свёртке непосредственной подстановкой.
10. Докажите теорему об умножении непосредственной подстановкой.
11. Выведите
выражение
для
спектральной
плотности
балансно-
модулированного колебания на основе теоремы модуляции и свойства
линейности преобразования Фурье.
12. Объясните качественно присутствие -функции в выражении (2.59).
13. Докажите, что АКФ вещественного сигнала обладает свойством чётности.
14. Может ли функция
1, t0
R( )
0, t0
быть автокорреляционной функцией какого-либо сигнала? Если да,
укажите такой сигнал. Если не может – объясните, почему.
15. Рассчитайте и постройте график автокорреляционной функции сигнала
Баркера длины 13, если полярности импульсов определяются последовательностью +1 +1 +1 +1 +1 −1 −1 +1 +1 −1 +1 −1 +1.
16. Определите коэффициент прямоугольности RC-фильтра нижних частот
относительно уровня 3 дБ и 20 дБ.
171
17. Убедитесь, что импульсная характеристика идеального интерполиру
ющего фильтра с КЧХ (2.69) имеет вид h (t ) sin
Td
t
Td
t .
18. Докажите, что противоподменная фильтрация вдвое уменьшает энергию ошибки восстановления аналогового сигнала по его отсчётам (противоподменный и интерполирующий фильтры считайте идеальными).
19. Часто в качестве моделей импульсных сигналов используют нефинитные функции, имеющие бесконечную длительность. В таких случаях
вводят эффективную длительность сигнала – временной интервал, на
котором сосредоточена бόльшая часть его энергии. Определите эффективную длительность экспоненциального импульса
Ae t , t 0
s (t )
,
t0
0,
как интервал, на котором сосредоточено 95% энергии.
20. Многие модели сигналов, удобные в аналитическом отношении, характеризуются нефинитным спектром (или спектральной плотностью).
Для них вводят понятие эффективной ширины спектра – частотного
интервала, содержащего заданную долю kэ энергии сигнала. Определите эффективную ширину спектра прямоугольного импульса при
kэ 0.9664 .
21. Покажите, что импульсная характеристика цепи с КЧХ (2.71), имеет
вид (t )
j
.
t
22. Выведите формулу, выражающую сигнал xˆ (t ) через квадратурные
компоненты (см. (2.78)).
172
3. ЭЛЕМЕНТЫ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ
Как уже отмечалось ранее, все сигналы и помехи являются случайными.
Это означает, что точное значение сигнала (помехи) в любой момент времени не может быть определено до наступления этого момента. Можно лишь
утверждать, что это значение с некоторой вероятностью будет находиться в
определённом интервале. Задачи, связанные с определением таких вероятностей, решаются в рамках теории случайных процессов, которая является частью теории вероятностей.
Одним из центральных понятий теории вероятностей служит понятие
случайного опыта (эксперимента), в результате которого реализуется один из
возможных исходов. Исход опыта заранее предсказать нельзя, но можно
определить вероятность того или иного исхода. В основе определения понятия вероятности лежит частота реализации данного исхода при многократном повторении опыта в одинаковых условиях. Точнее, вероятностью случайного события называется предел отношения числа благоприятных исходов к общему количеству испытаний при неограниченном увеличении последнего. Такое частотное определение вероятности интуитивно понятно,
но в современной математике теория вероятностей строится аксиоматически
на основе теории меры.
В основе современной теории вероятностей лежит представление о некотором воображаемом множестве или пространстве элементарных событий . Каждое элементарное событие можно представить себе как
точку пространства . Подмножество A множества называется случайным событием. В эксперименте происходит выбор одного из элементарных
событий, причём механизм этого выбора наблюдателю не известен и представляется случайным, поэтому исход эксперимента предсказать нельзя.
Каждой точке пространства можно сопоставить некоторую неслучайную (детерминированную) функцию времени. Тогда выбор конкретного эле-
173
мента приводит к осуществлению вполне определенной (детерминированной) функции времени – реализации случайного процесса. Важно подчеркнуть, что в основе теории вероятностей лежит допущение о возможности выполнения сколь угодно большого числа повторений случайного эксперимента
в абсолютно одинаковых условиях и получения любого количества реализаций случайного события, случайной величины или случайного процесса. Для
того чтобы разным событиям можно было приписать различные вероятности,
с пространством связывают функцию P : , называемую вероятностной мерой, в соответствии с которой элементарные события имеют
бóльшие или меньшие шансы быть выбранными в конкретном опыте.
Более точно, мера P ставит в соответствие любому подмножеству A
множества неотрицательное вещественное число, не превышающее единицы, называемое вероятностью P ( A) случайного события A . При этом
P() 1, то есть вероятность достоверного события равна 1 (это означает
просто, что в результате опыта какая-нибудь точка из обязательно будет
выбрана). Невозможное событие (пустое множество), обозначаемое , имеет вероятность P() 0 . Строго говоря, в современной теории вероятностей
для полного задания вероятностного описания необходимо также определить
систему измеримых подмножеств (подмножеств множества , для которых
определена мера), замкнутую относительно операций объединения и пересечения и называемую -алгеброй или -полем [12].
Теория случайных процессов представляет собой большой раздел теории вероятностей; здесь приводится лишь краткое изложение основных понятий, необходимых для усвоения изучаемых разделов общей теории связи.
Для более полного изучения теории вероятностей и теории случайных процессов следует обратиться к специальным учебникам, например, [12, 13].
174
3.1. Случайные величины и их характеристики
Под случайной величиной (СВ) понимается скалярная величина, которая
в результате случайного эксперимента может принять то или иное числовое
значение. Это конкретное значение, заранее непредсказуемое, называется реализацией случайной величины. Задачи, связанные со случайной величиной,
заключаются в нахождении вероятности принятия этой СВ конкретного значения или вероятности попадания реализации СВ в некоторый интерал.
В рамках аксиоматической теории вероятностей случайная величина
определяется как функция x () , заданная на множестве и принимающая
вещественные или комплексные значения. При фиксированном значение x( ) также фиксировано. Таким образом, в результате случайного
эксперимента осуществляется одно значение случайной величины x , которое называется её реализацией.
Полное описание случайной величины составляет кумулятивная функция распределения97, определяемая выражением
F ( x) P x( ) x ,
где P{}
обозначает вероятность события, состоящего в том, что случайная
величина x( ) в конкретном опыте примет значение , не превосходящее98
заданного значения x . Далее, если это не приведёт к двусмысленности, будем случайную величину x( ) обозначать также буквой x .
Случайная величина, принимающая значения из дискретного множества,
называется дискретной. Примером дискретной СВ может служить количество точек на верхней грани игральной кости (возможными реализациями такой случайной величины являются целые числа от 1 до 6). Функция распределения дискретной СВ имеет ступенчатый вид.
97
Обычно её называют просто функция распределения
Это определение соответствует ГОСТ 50779.1–2000; во многих учебниках определение функции распределения дается через строгое неравенство (<). В большинстве практически важных случаев это различие не
играет заметной роли.
98
175
Если случайная величина может принимать значения из непрерывного
множества (континуума), а функция распределения непрерывна и дифференцируема, то можно определить плотность распределения вероятностей
(ПРВ), называемую также для краткости плотностью вероятности (а иногда
просто плотностью)
dF ( x)
w( x)
, при этом F ( x)
dx
x
w( x)dx .
В силу сказанного ПРВ, как и функция распределения, является полным описанием случайной величины.
Очевидно, функция распределения по определению должна быть неотрицательной неубывающей функцией со свойствами F () 0 , F () 1 .
Первое свойство означает, что реализация случайной величины не может
быть меньше чем , а второе – что реализация СВ не может превысить .
Функция распределения не может убывать с ростом аргумента, т.к. с расширением интервала , x вероятность попадания реализации случайной величины в этот интервал либо возрастает, либо остаётся неизменной, но не
может уменьшаться. Из этих свойств функции распределения следует, что
плотность распределения должна быть неотрицательной функцией, удовле
творяющей условию нормировки
w( x)dx 1 .
Легко видеть, что вероятность попадания случайной величины в интервал a, b может быть найдена, как
P a x b F (b) F (a ) .
Эту вероятность можно также найти, зная ПРВ:
b
P a x b w( x ) dx .
a
176
Иногда используется описание случайной величины характеристической функцией, которая определяется выражением
(u )
w( x)e
jux
dx ,
(3.1)
совпадающим с преобразованием Фурье плотности распределения вероятностей (с точностью до знака показателя экспоненты). Поскольку функция распределения, ПРВ и характеристическая функция связаны между собой взаимно однозначно, любая из этих функций представляет собой исчерпывающее описание случайной величины.
Иногда в полном описании случайной величины нет необходимости и
можно ограничиться её числовыми характеристиками. Чаще всего в качестве
таких характеристик выступают так называемые моменты, определяемые
следующими выражениями. Начальный момент k -го порядка ( k -й начальный момент)
mk
x k w( x)dx .
В частности, одной из важнейших числовых характеристик СВ служит
первый начальный момент
m1
xw( x ) d x ,
(3.2)
называемый математическим ожиданием и обозначаемый обычно буквой m .
Формула вычисления математического ожидания совпадает с выражением
момента силы тяжести бесконечно тонкого стержня единичной массы, расположенного горизонтально вдоль оси x и обладающего линейной плотностью, описываемой функцией w( x) . При этом значение математического
ожидания численно равно абсциссе центра масс стержня. По этой причине
математическое ожидание иногда называют центром распределения или ча177
ще средним значением случайной величины. Следует отметить, что для случайной величины, имеющей физическую размерность, математическое ожидание имеет ту же размерность. Например, если в качестве СВ рассматривается напряжение, то математическое ожидание имеет размерность Вольт.
Интегрирование произвольной функции f ( x) случайной величины x с
весом, равным ПРВ w( x) , называют усреднением этой функции по ансамблю99 и часто применяют одно из символических обозначений
f ( x) w( x)dx f ( x) E f ( x) M f ( x) .
В частности, характеристическую функцию (3.1) случайной величины
можно трактовать, как результат усреднения комплексной экспоненты e jux :
(u )
w( x)e
jux
dx e jux .
Кроме начальных моментов используют центральные моменты, которые совпадают с начальными моментами центрированной случайной величины. Центрированная СВ x получается вычитанием из данной случайной
величины её математического ожидания x x x . При этом график ПРВ
сдвигается по оси абсцисс так, что математическое ожидание становится
равным нулю.
Таким образом, центральный момент k -го порядка ( k -й центральный
момент) равен
Mk
( x m)
k
w( x)dx ( x m) k E ( x m) k .
Наиболее употребительным из центральных моментов является второй
центральный момент, или дисперсия
99
Под ансамблем понимается множество реализаций случайной величины или процесса вместе с вероятностной мерой, заданной на этом множестве
178
D M2
( x m)
2
w( x)dx ( x m) 2 E ( x m) 2 .
(3.3)
В вышеупомянутом механическом примере дисперсии соответствует момент
инерции стержня при вращении его вокруг центра масс. Дисперсия тем
меньше, чем более сосредоточена «масса вероятности» около среднего значения случайной величины (математического ожидания). Вместо дисперсии
часто оперируют величиной, равной D и называемой среднеквадратическим отклонением (СКО) случайной величины. Удобство СКО по сравнению с дисперсией заключается в том, что СКО имеет ту же размерность, что
случайная величина и её математическое ожидание.
Еще одной числовой характеристикой СВ является средний квадрат,
или второй начальный момент m2
x 2 w( x)dx x 2 E x 2 . Нетрудно ви-
деть, что он связан с дисперсией и математическим ожиданием:
D
( x m)
2
w( x)dx
(x
2
2mx m 2 ) w( x)dx
m2 2m2 m2 m2 m2 .
Пример 3.1. В математике и технике часто используется нормальное, или
гауссово (гауссовское) распределение с ПРВ
w( x)
1
e
2
( x m)2
2 2
,
где m и – параметры распределения. Математическое ожидание гауссовской случайной величины равно m , а дисперсия равна 2 . Таким образом,
параметр имеет смысл СКО и характеризует степень «размазанности» распределения случайной величины вдоль оси абсцисс, рис. 3.1. ◄
179
Рис. 3.1. Гауссовские ПРВ при различных значениях СКО
В теории информации используется числовая характеристика распределения непрерывной случайной величины, называемая (дифференциальной)
энтропией и определяемая выражением
1
h( x) log 2
w( x)
w( x)log 2 w( x)dx .
Дифференциальная энтропия тем больше, чем больше дисперсия (и
СКО) случайной величины. Энтропия и дисперсия равны нулю для распределения, плотность которого имеет вид -функции. Такой вид плотности распределения означает, что случайная величина принимает значение, равное
математическому ожиданию, с вероятностью единица (можно считать, что
-образная ПРВ описывает неслучайную величину).
Две случайные величины x x( ) и y y ( ) , заданные на общем пространстве , характеризуются совместной плотностью распределения
w( x, y) . Совместная функция распределения двух случайных величин x и y
определяется выражением
F ( x, y ) P x; y
x y
w( x, y)dxdy ,
180
описывающим вероятность того, что одновременно (в одном опыте) осуществляются события { x( ) x} и { y ( ) y} . Совместная функция
распределения обладает свойствами F (, ) 0 , F (, ) 1 и не убывает
по обоим аргументам. Соответственно совместная плотность неотрицательна
и удовлетворяет условию нормировки
w( x, y)dxdy 1 . Если совместная
плотность равна произведению одномерных плотностей w( x, y ) w( x) w( y ) ,
то случайные величины x и y независимы.
Если две случайные величины x и y не являются независимыми, то их
совместная ПРВ может быть записана в виде
w( x, y ) w( x) w( y | x) w( x | y ) w( y ) ,
где w( x | y ) и w( y | x ) – условные плотности распределения вероятностей. Поэтому можно условие независимости сформулировать и так: случайные величины независимы, если их условные плотности равны безусловным:
w( x | y ) w( x) , w( y | x) w( y ) .
Числовыми характеристиками совместного распределения двух случайных величин x и y служат начальные и центральные смешанные моменты
mkn
x k y n w( x, y )dxdy ,
M kn
( x mx )
k
( y m y ) n w( x, y )dxdy ,
где k и n – произвольные целые положительные числа.
Наиболее часто используются смешанные моменты второго порядка –
начальный (корреляционный момент)
181
m11
xyw( x, y )dxdy Rxy
(3.4)
и центральный (ковариационный момент, или ковариация100)
M11
( x mx )( y m y )w( x, y)dxdy k xy .
(3.5)
Корреляция представляет собой простейшую характеристику степени
статистической (вероятностной) связи случайных величин x и y . Ковариация является аналогичной характеристикой связи центрированных СВ x и
y .
Пример 3.1. Для пары гауссовских случайных величин x1 и x2 двумерная
совместная ПРВ имеет вид
w( x1, x2 )
1
21 2 1 r 2
e
( x1 m1 )2
( x1 m1 )( x2 m2 ) ( x2 m2 ) 2
2
r
1 2
22
2(1 r 2 ) 12
1
где 1 , 2 – среднеквадратические отклонения случайных величин x1 и x2 ,
m1, m2 – их математические ожидания, r – коэффициент корреляции, пред-
ставляющий собой нормированный ковариационный момент
r
( x1 m1 )( x2 m2 )
1 2
k x1 x2
1 2
.◄
На рис. 3.2,а показана двумерная гауссовская ПРВ при r 0 ,
m1 m2 0 , 1 2 , а на рис. 3.2, б – ее отображение линиями уровня. Для
сравнения на рис. 3.3 показаны линии уровня гауссовской ПРВ при r 0.9
(а) и r 0.9 (б). Из рисунков видно, что при положительном коэффициенте
корреляции двух СВ более вероятны их реализации с близкими значениями,
100
В литературе иногда момент, определяемый формулой (3.4), называют ковариационным, тогда корреляционным называют момент (3.5)
182
а прри отрицаательном – с близккими по модулю,
м
но
н различ ающимисся по знакку.
При
и нулевом
м коэффиц
циенте коорреляции
и
w( x1, x2 )
1
e
1
2
( x m )2
1 21
21
1
2
2
e
( x m )2
2 22
2 2
w( x1 ) w( x2 ) ,
т.е. некорреелированн
ные гаусссовские случайн
ные велиичины независим
н
мы
помним, что
ч совмеестная ПР
РВ незави
исимых сл
лучайныхх величин
н равна прро(нап
извеедению их
и одномеерных ПР
РВ). Для негауссов
н
вских слуучайных величин
в
н
некорррелирован
нность не
н означаает незави
исимости
и, хотя изз их независимоссти
след
дует некооррелировванность. Таким об
бразом, вообще гооворя, независимоссть
– боолее сильнное свойство, чем н
некоррелированно
ость.
а
б
Рис.3.2. Д
Двумернаяя гауссовская ПРВ
а
б
Р
Рис.3.3. Ли
инии уровн
ня двумернной гауссоввской ПРВ при r 0. 9 (а) и r 0.9 (б)
1
183
Поскольку случайные величины являются функциями, множество случайных величин можно рассматривать как векторное пространство. Действительно, случайные величины (как функции на пространстве ) можно складывать, при этом сумма снова будет случайной величиной. Случайные величины можно умножать на скалярные коэффициенты, причем множество случайных величин замкнуто относительно такого умножения. Справедливость
аксиом линейного пространства (разд. 2.3) легко проверяется непосредственно. Таким образом, множество всех вещественных случайных величин, заданных на общем множестве элементарных событий , можно рассматривать, как линейное пространство над полем вещественных чисел (аналогично можно ввести пространство комплексных случайных величин над полем комплексных чисел и т.д.). Дальнейшее усовершенствование структуры пространства достигается введением нормы, метрики и скалярного произведения. Для того чтобы пространство было гильбертовым, необходимо, чтобы норма порождалась скалярным произведением, а метрика – нормой (см.
п. 2.5). Операцию скалярного умножения можно определить для вещественных случайных величин x и y , как смешанный момент второго порядка
(корреляционный момент)
( x, y )
xyw( x, y )dxdy xy .
(3.6)
В частности, если две величины имеют нулевой корреляционный момент, то они считаются ортогональными. Проверим выполнение аксиом скалярного произведения.
Из (3.6) очевидно выполнение равенства ( x, y) ( y, x) ( y, x)* .
Проверка выполнения условия ( x y, z ) ( x, z ) ( y, z ) может быть
произведена непосредственно:
184
( x y, z )
( x y) zw( x, y, z )dxdydz
xzw( x, z )dxdz
yzw( y, z )dydz xz yz .
Здесь w( x, y, z ) – совместная плотность распределения вероятностей
трёх случайных величин, которая при интегрировании по одному из аргументов даёт совместную плотность оставшихся двух случайных величин101,
например
w( x, y, z )dx w( y, z ) .
Третье условие, очевидно, выполняется: ( x, x) 0 , поскольку ( x, x) – не
что иное, как средний квадрат случайной величины x , неотрицательный по
определению. Равенство нулю среднего квадрата (как второго начального
момента) возможно только в том случае, если вся «вероятностная масса» сосредоточена в точке x 0 . Таким образом, роль нулевого вектора в рассматриваемом пространстве играет случайная величина, которая принимает значение 0 с вероятностью 1 (плотность вероятности такой случайной величины
равна ( x ) ).
Норма случайной величины определяется через скалярное произведение,
как
( x, x) x , а метрика задается через норму
d ( x, y ) x y ( x y ) 2 .
Итак, множество случайных величин, определённых на общем про-
странстве элементарных событий, становится гильбертовым пространством.
К нему применимы все ранее введённые для гильбертова пространства поня-
101
ПРВ, которая получается интегрированием ПРВ бо́льшей размерности по одной или нескольким переменным, называется маргинальной
185
тия, такие, как базис, ортонормальный базис, ортогонализация Грама–
Шмидта, равенство Парсеваля и т.п.
В следующем примере математические ожидания случайных величин
приняты равными нулю, при этом средний квадрат совпадает с дисперсией, а
корреляционный момент – с ковариационным (вторым смешанным центральным моментом).
Пример 3.2. (При первом чтении этот пример можно пропустить. К нему
сто́ит вернуться при изучении фильтра Колмогорова–Винера в п.11.3.)
Рассматриваемая в статистической теории связи задача оптимальной фильтрации заключается в том, чтобы по наблюдаемому случайному колебанию
z (t ) наилучшим образом оценить полезный (случайный) сигнал x(t ) . Это
возможно, если наблюдаемый и полезный сигналы зависимы в вероятностном смысле. И наблюдаемый, и полезный сигналы здесь будем понимать, как
наборы случайных величин – отсчетов сигнала (их множество может быть несчетным, т.е. непрерывным). Оптимальный линейный фильтр – это линейный
, преобразующий колебание z (t ) в другое колебание – оценку
оператор L{}
x(t)= L{z (t )} полезного сигнала, такую, что дисперсия ошибки оценивания
[ x(t ) L{z (t )}]2 минимальна.
Результат воздействия на сигнал z (t ) линейного оператора – это, нестрого говоря, линейная комбинация всех отсчетов сигнала. Поэтому оценка
принадлежит линейной оболочке отсчетов сигнала z (t ) , или подпространству, натянутому на эти отсчеты (которые представляют собой случайные
величины, т.е. векторы). Полезный сигнал x(t ) в общем случае лежит вне
этого подпространства, рис.3.4.
186
Рисс. 3.4. Геом
метрическаяя интерпреетация прин
нципа опти
имального ллинейного оценивани
ия
Из геом
метрическ
ких сообрражений ясно, чтто СКО оошибки оцениван
о
ния
(норрма ошиб
бки) будетт минимаально в том случае, если веектор ош
шибки буд
дет
орт
тогоналенн этому подпрострранству (о
ошибка некоррели
н
ирована с наблюдааемым
м сигналоом во всее моменты
ы времен
ни), следо
овательно , условиее оптималльностти операттора эквиввалентно ортогонаальности
[ x(t ) L{z (t )}] z (t ) 0 .
Учитываая, что линейный
л
й операто
ор выражается инттегралом, для опттималььной линейной оценки полуучаем
x(t ) h(t , )z ( )d z ( ) 0 ,
где h(t , ) – весовая функция (ядро оп
ператора)), – пееременнаяя, имеющ
щая
разм
мерность времени.. Раскрыввая скобки
и и выпол
лняя форм
мальное усреднени
у
ие,
полуучаем
x(t ) z ( )
h(t, ) z ( ) z ( )d 0
откууда следуует уравнеение Винер
ера-Хопфа
а
h(t , ) Rzz ( , )d Rxz (t , ) ,
1
187
где Rzz ( , ) z ( ) z ( ) – второй смешанный момент отсчетов случайного
процесса z (t ) в моменты времени и , называемый функцией автокорреляции процесса z (t ) , а Rxz (t , ) x (t ) z ( ) – второй смешанный момент отсчетов различных процессов x(t ) и z (t ) , называемый функцией взаимной корреляции (подробнее эти функции обсуждаются в следующем подразделе).
Весовая функция h(t , ) оптимального линейного устройства оценивания находится, как решение уравнения Винера–Хопфа (подробнее см. разд.
11).◄
3.2. Случайные процессы
В теории связи большую роль играют случайные процессы, являющиеся математическими моделями как сигналов, так и помех. Случайный процесс – это колебание, принимающее в любой заданный момент времени значение, которое невозможно предсказать заранее. Таким образом, можно понимать случайный процесс как последовательность случайных величин, следующих друг за другом в порядке возрастания некоторой переменной (чаще
всего времени – дискретного или непрерывного). С другой стороны, случайный процесс можно рассматривать как функцию x(t , ) двух аргументов –
времени t и элементарного события (точки пространства ). При таком
подходе выбор в эксперименте конкретной точки приводит к осуществлению определённой детерминированной функции времени, называемой реализацией (выборочной функцией, траекторией) случайного процесса. Совокупность всех реализаций случайного процесса вместе с вероятностной мерой часто называют ансамблем. Далее случайный процесс будет обозначаться x(t ) , а его реализация – (t ) .
Свойства случайного процесса можно описать, рассматривая совместные распределения двух, трех и т.д. мгновенных значений процесса в некоторые различные моменты времени. Совокупность выборочных значений
188
(отсчётов) x1 x (t1 ), …, xn x (tn ) процесса в n временны́х сечениях (при
t t1,..., tn ), описывается n -мерной совместной функцией распределения и
соответствующей плотностью распределения вероятностей, связанными выражением
P 1 x1,..., n xn F ( x1,..., xn )
x1
xn
... w( x1,..., xn )dx1...dxn .
Здесь и далее зависимость от времени явно не указана для упрощения
записи. Для n -мерной ПРВ выполняется условие нормировки
... w( x1,..., xn )dx1...dxn 1 .
Случайный процесс считается полностью определённым, если для любого n можно записать его совместную ПРВ при любом выборе временны́х
сечений t1,..., tn . Следует отметить, что на практике это удается сделать
крайне редко. Исключение составляют гауссовские (см. пример 3.4), а также
марковские процессы.
Совместная
ПРВ
выборочных
значений
(отсчётов)
x1 x (t1 ), …
xn x (tn ) любого случайного процесса может быть записана в форме
w( x1,..., xn ) w( x1 ) w( x2 | x1 ) w( x3 | x1, x2 ) ... w( xn | x1, x2 ,..., xn 1 ) ,
где w( xk | x1, x2 ,..., xk 1 ) – условная ПРВ k -го отсчёта при заданных значениях предшествующих отсчётов (как и ранее, для упрощения записи не показана зависимость от t1,..., tn ). Ясно, что чем больше n , тем сложнее записать
совместную плотность.
Задача сильно упрощается, если процесс обладает марковским свойством (является марковским). Процесс называется марковским, если совместная плотность его мгновенных значений имеет вид
w( x1 ,..., xn ) w( x1 ) w( x2 | x1 ) w( x3 | x2 ) ... w( xn | xn 1 )
189
n
w( x1) w( xk | xk 1) .
k 2
Иными словами, для марковского процесса условная плотность распределения вероятностей w( xk | x1, x2 ,..., xk 1 ) фактически зависит только от
одного предпоследнего отсчёта w( xk | x1, x2 ,..., xk 1 ) w( xk | xk 1 ) . Поэтому
достаточно знания только попарных условных (переходных) плотностей и
безусловной плотности первого отсчёта, чтобы записать совместную ПРВ
сколь угодно большой совокупности отсчётов. Поскольку условная плотность значения марковского процесса при заданных нескольких прошлых его
значениях фактически зависит лишь от последнего из них, марковские процессы называют также процессами без последействия.
Один из способов задания марковского процесса с дискретным временем основан на модели, получившей название распределения Гиббса. Первоначально эта модель была введена в статистическую физику для вероятностного описания системы частиц, находящихся в тепловом равновесии со средой. Впоследствии распределение Гиббса стали использовать для статистического описания сигналов и изображений, т.к. эта модель позволяет строить
эффективные алгоритмы их обработки (фильтрации, восстановления и т.п.).
Пример 3.3. Дискретный случайный процесс, описываемый распределением
Гиббса, рассматривается как совокупность случайных величин, упорядоченных в соответствии с дискретным временем:
x[n] x[1], x[2],..., x[ N ] ,
причём существенно, что количество отсчётов N конечно. Гиббсовское описание основано на том, что точки временной оси объединяются в группы,
называемые кли́ками, и каждой клике приписывается некоторая положительная функция, именуемая фактор-потенциалом и зависящая от значений, принимаемых процессом в точках клики. Примем для простоты, что каждая клика включает две соседние точки временной оси с номерами j и ( j 1) ,
190
j 1,2,...N 1 . Обозначим фактор-потенциал клики S j , j 1 x[ j ], x[ j 1] . Тогда вероятность того, что процесс примет в N точках временной оси конкретные значения x[1], x[2],..., x[ N ] , определяется выражением
P( x) P x[1], x[2],..., x[ N ] Z
1
N 1
S j, j 1 x[ j ], x[ j 1] , (3.7)
j 1
где Z находится из условия нормировки. Известна теорема Хэммерсли–
Клиффорда [14], устанавливающая, что процесс с распределением Гиббса
обладает марковским свойством, и наоборот, марковская последовательность
конечной длины имеет распределение вероятностей, которое можно записать
в форме распределения Гиббса (3.7). Если значения процесса квантованы,
выражение (3.7) описывает дискретное распределение вероятностей, если
значения принадлежат непрерывному множеству – (3.7) представляет собой
совместную ПРВ отсчётов процесса.
Преимуществом гиббсовской модели является практически полная
свобода выбора конфигураций клик и вида фактор-потенциалов, которые и
определяют разнообразие описываемых процессов. При этом размерность
процесса не играет роли, именно поэтому распределение Гиббса нашло широкое применение при построении алгоритмов обработки изображений и
других многомерных процессов. Недостаток модели заключается в трудности
аналитического определения нормирующей величины Z (за исключением
простейших случаев), а также установления взаимосвязи между традиционным и гиббсовским описаниями марковских процессов [15]. Кроме того, в
некоторых задачах условие конечности N представляется слишком ограничительным. ◄
Числовыми характеристиками случайного процесса являются его смешанные начальные моменты (если они существуют, т.е. сходятся соответствующие интегралы)
191
mk1...kn
...
x1k1 ...xn kn w( x1,..., xn )dx1...dxn
(3.8)
и смешанные центральные моменты
M k1...kn
k
k
... ( x1 mx1) 1 ...( xn mxn ) n w( x1,..., xn )dx1...dxn
(3.9)
при целых неотрицательных k1,..., kn и целом n .
В частности, полагая в (3.8) k1 1 , k2 ... kn 0 , получаем первый
начальный момент (математическое ожидание) мгновенного значения процесса при t t1 ; при k1 2 , k2 ... kn 0 выражение (3.8) определяет средний квадрат, а выражение (3.9) – дисперсию в соответствующем сечении. Если под случайным процессом подразумевается сигнал в форме напряжения,
то математическое ожидание имеет смысл его среднего значения («медленной» составляющей), средний квадрат – полной мощности, а дисперсия –
мощности флюктуационной («быстрой») составляющей.
В общем случае моменты совместной ПРВ зависят от расположения
сечений на оси времени и называются поэтому моментными функциями.
Чаще всего используют функцию двух временны́х аргументов – второй смешанный центральный момент (ковариацию) двух мгновенных значений процесса
M11 K x (t1, t2 )
( x1 mx1)( x2 mx 2 )w( x1, x2 )dx1.dx2
( x1 mx1 )( x2 mx 2 ) .
(3.10)
Эта функция далее называется функцией автоковариации или автоковариационной функцией (АКФ) [16, 17]. Аналогичную моментную функцию, основанную на втором смешанном начальном (корреляционном) моменте
m11 Rx (t1, t2 )
x1x2 w( x1, x2 )dx1.dx2 x1 x2
(3.11)
192
будем называть функцией автокорреляции или автокорреляционной функцией102. Напомним, что здесь и далее в подынтегральных выражениях явно не
указана зависимость от времени, в частности, в общем случае функциями
времени являются m x1 m x1 (t1 ) и mx 2 mx 2 (t2 ) .
Следует заметить, что в литературе имеет место существенный «разнобой» в терминологии, связанной с описанием корреляционных свойств случайных процессов. Так, во многих книгах функция (3.10) называется корреляционной (напр., [18–20]). Иногда ковариационную функцию определяют
через второй смешанный начальный момент ([12], [20]). Некоторые авторы
явно или неявно полагают математическое ожидание процесса равным нулю,
вследствие чего различие между начальными и центральными моментными
функциями исчезает ([12], [21]).
Можно рассматривать совместно два случайных процесса x(t ) и y (t ) ,
которые в общем случае не являются независимыми в вероятностном смысле; такое рассмотрение предполагает их совместное описание в виде совместной многомерной ПРВ, а также в виде совокупности всех моментов, в
том числе смешанных. Наиболее часто при этом используют второй смешанный центральный момент
K xy (t1, t2 )
( x1 mx1)( y2 my 2 )w( x1, y2 )dx1.dy2
( x1 mx1 )( y2 m y 2 ) ,
называемый взаимно ковариационной функцией, а также взаимно корреляционную функцию
Rxy (t1, t2 )
x1 y2 w( x1, y2 )dx1.dy2 x1 y2 .
102
Ни в коем случае не следует путать понятия автокорреляционной функции для случайных процессов и
для детерминированных сигналов, которые имеют совершенно разный смысл!
193
Среди всех случайных процессов выделяют процессы, для которых
совместная n -мерная ПРВ совокупности отсчётов инвариантна к сдвигу, т.е.
не изменяется при одновременном сдвиге всех временных сечений t1,..., tn на
одну и ту же величину. Такие процессы называются стационарными в узком
смысле, или строго стационарными.
Чаще на практике ограничивают рассмотрение случайными процессами с ослабленным условием стационарности. СП называется стационарным
в широком смысле (или слабо стационарным), если при одновременном
сдвиге временных сечений не изменяются лишь его моменты не выше второго порядка. Практически это означает, что СП x(t ) стационарен в широком
смысле, если он имеет постоянные среднее (математическое ожидание mx ) и
дисперсию Dx , а автоковариационная функция зависит только от разности
временных сечений, но не от их положения на временнóй оси:
1. mx (t ) mx ,
2. K x (t1, t2 ) K x (t2 t1 ) K x ( ) , t2 t1 .
Заметим, что K x (0) Dx , откуда и следует постоянство дисперсии.
Ниже для упрощения записи выражений будем пользоваться символическим обозначением усреднения по ансамблю, так, для стационарного процесса
K x ( ) [ x(t ) m][ x (t ) m] ,
Rx ( ) x(t ) x(t ) .
Нетрудно убедиться, что процесс, стационарный в узком смысле, стационарен и в широком смысле. Обратное, вообще говоря, неверно, хотя существует класс процессов, для которых стационарность в широком смысле
означает и стационарность в узком смысле.
Пример 3.4. Совместная n -мерная ПРВ отсчетов x1,..., xn гауссовского процесса, взятых в моменты времени t1,..., tn , имеет вид
194
w( x1, x2 ,...., xn )
1
(2 )n /21 2 .... n r
1/2
e
( x m ) ( x j m j )
1 n n
Aij i i
2 r i 1 j 1
i
j
, (3.12)
где r – определитель квадратной матрицы, составленной из попарных коэффициентов корреляции отсчетов, A ij – алгебраическое дополнение элемента rij этой матрицы.
Как видно из этого выражения, совместная ПРВ полностью определяется математическими ожиданиями, дисперсиями и попарными коэффициентами корреляции отсчетов. Если процесс стационарен в широком смысле, то
все математические ожидания одинаковы, все дисперсии (а значит, и СКО)
равны друг другу, а коэффициенты корреляции определяются только тем,
насколько временные сечения t1,..., tn отстоят друг от друга. Тогда, очевидно,
ПРВ (3.12) не изменится, если все сечения t1,..., tn сдвинуть влево или вправо
на одну и ту же величину. Отсюда следует, что гауссовский процесс, стационарный в широком смысле, стационарен и в узком смысле (строго стационарен). ◄
Среди строго стационарных случайных процессов часто выделяют ещё
более узкий класс эргодических случайных процессов. Для эргодического
процесса моменты, найденные усреднением по ансамблю, равны соответствующим моментам, найденным усреднением по времени единственной
произвольно выбранной реализации этого процесса103:
mk
x(t )
k
T
1
k
lim (t ) dt ,
T T
0
Mk
x(t ) m
k
T
1
k
lim (t ) m dt
T T
0
103
Строгое определение эргодичности выходит за рамки учебника (см., напр., [12])
195
(здесь (t ) – реализация процесса x(t ) , – символическое обозначение
оператора усреднения по времени).
В частности, для эргодического процесса математическое ожидание,
дисперсия и АКФ равны соответственно
T
1
m x(t ) lim (t )dt ,
T T
0
D
x(t ) m
2
T
1
2
lim (t ) m dt ,
T T
0
K x ( ) x(t ) m x(t ) m x(t ) x (t ) m 2
T
1
lim (t ) (t )dt m2 .
T T
0
Эргодичность представляет собой весьма желательное свойство, т.к.
дает возможность практически измерять числовые характеристики случайного процесса. Дело в том, что обычно наблюдателю доступна лишь одна
(хотя, возможно, достаточно длинная) реализация случайного процесса. Эргодичность означает, по существу, то, что знание единственной реализации
равносильно знанию всех вероятностных свойств процесса. Поэтому по одной реализации можно определить все характеристики процесса.
Пример. 3.5. Измерение характеристик эргодического процесса может быть
выполнено при помощи простых измерительных устройств; так, если процесс
представляет собой напряжение, зависящее от времени, то вольтметр магнитоэлектрической системы измеряет его математическое ожидание (постоянную составляющую), вольтметр электромагнитной или термоэлектрической
системы, подключенный через разделительную емкость (для исключения постоянной составляющей) – его среднеквадратическое значение (СКО). Коррелометр, структурная схема которого показана на рис. 3.5, позволяет измерять значения функции автоковариации при различных значениях временно-
196
го сдвига . В качестве интегратора часто используют фильтр нижних частот; конденсатор выполняет центрирование процесса, так как не пропускает
постоянную составляющую тока. Если конденсатор отсутствует, измеряется
функция автокорреляции.
Рис. 3.5. Структурная схема коррелометра
Разумеется, перечисленные устройства дают не точные, а лишь приближённые значения (результаты измерения) уже в силу того, что время измерения конечно. ◄
Итак, эргодичность процесса является очень полезным для практики
свойством случайных процессов, однако это и весьма сильное ограничительное условие (напомним, что эргодические процессы составляют подкласс
строго стационарных процессов).
К счастью, на практике далеко не всегда требуется эргодичность в
строгом смысле. Часто достаточно, чтобы это свойство выполнялось в отношении не всех характеристик случайного процесса, а лишь его моментов
низших порядков, измерение которых обычно и производится. Такие ослабленные условия эргодичности уже не требуют строгой стационарности процесса. Например, для того, чтобы стационарный (в широком смысле) процесс
был эргодическим по математическому ожиданию, т.е. чтобы выполнялось
равенство
T
1
m x(t ) lim (t )dt ,
T T
0
достаточным является условие Слуцкого
T
1
lim K x ( )d 0
T T
0
197
(доказательство см., напр., в [22]).
3.3. Корреляционно-спектральные характеристики случайных
процессов
Точное решение задач, связанных с анализом случайных процессов и
их воздействия на ЛИС-цепи, сопряжено с большими трудностями, так как
предполагает отыскание совместной n -мерной ПРВ для выходного процесса.
Значительно проще решается задача анализа, если интересоваться только
моментными характеристиками первого и второго порядка, которые определяют свойство стационарности в широком смысле. Учитывая, что большинство реально наблюдаемых процессов удовлетворительно описываются гауссовской моделью, а гауссовские процессы полностью определяются моментными характеристиками не выше второго порядка, во многих случаях ограничиваются анализом на уровне математических ожиданий (средних) и корреляционных функций.
Рассмотрим вещественный стационарный в широком смысле случайный процесс x(t ) с нулевым средним. Его реализация, как детерминированная функция, может быть представлена обратным преобразованием Фурье
(t )
( f )e
j 2 ft
df
где ( f ) – спектральная плотность реализации. (Следует иметь в виду, что
почти все104 реализации стационарного СП не принадлежат пространству
сигналов конечной энергии L2 , поэтому их спектральные плотности можно
рассматривать лишь в терминах обобщённых функций, т.к. соответствующие
интегралы в классическом смысле расходятся. Однако, поскольку нас будут
интересовать лишь усредненные величины и функции, важна лишь интегри-
104
Заметим, что здесь выражение «почти все» понимается в строгом вероятностном смысле и означает
«с вероятностью единица»
198
руемость соответствующих математических ожиданий, которая обычно имеет место). Случайный процесс x(t ) можно записать в виде
x(t )
X ( f )e j 2 ft df ,
где X ( f ) – также случайный процесс (в соответствии с природой преобразования Фурье – это тот же процесс, представленный в другом «базисе»). Выясним основные свойства этого процесса.
Поскольку x(t ) – случайный процесс с нулевым средним, то X ( f )
также имеет нулевое среднее:
x(t )
X ( f )e j 2 ft df 0 X ( f ) 0 .
Автокорреляционная функция105 вещественного процесса x(t )
Rx ( ) x(t ) x(t ) x* (t ) x(t )
X * ( f ) X ( )e j 2 ft e j 2 t e j 2 dfd
Wx ( f ) ( f )e
j 2
dfd .
Последнее равенство записано на том основании, что АКФ не зависит
от переменной t , а это может быть только при условии, что f , т.е. при
выполнении равенства
X * ( f ) X ( ) Wx ( f ) ( f ) .
(3.13)
С учетом фильтрующего свойства -функции можно записать
105
Напомним, что автокорреляционная и автоковариационная функции процесса с нулевым средним совпадают. Поэтому в дальнейшем для этих функций, если это не вызовет путаницы, используется общая аббревиатура АКФ.
199
Wx ( f )e
Rx ( )
j 2 f
df ,
(3.14)
а следовательно,
Rx ( )e
Wx ( f )
j 2 f
d .
(3.15)
Выражения (3.14) – (3.15) представляют собой утверждение теоремы Винера–Хинчина.
При 0 из выражения (3.14) следует
Rx (0)
Wx ( f )df ,
а поскольку Rx (0) Dx – мощность случайного процесса (с нулевым средним), то функция Wx ( f ) описывает распределение мощности процесса между различными частотными составляющими и называется поэтому спектральной плотностью мощности (СПМ). Очевидно, СПМ – неотрицательная функция. Если процесс имеет ненулевое математическое ожидание m , то
к СПМ добавляется слагаемое m 2 ( f ) .
Для вещественного процесса АКФ – чётная вещественная функция, тогда СПМ – тоже чётная вещественная. Поэтому нередко используется односторонняя СПМ N x ( f ), f 0 . Тогда выражение (3.14) можно переписать в
виде
Rx ( ) N x ( f )cos(2 f )df ,
0
где N x ( f ) 2Wx ( f ) .
Отметим, что по виду функции спектральной плотности мощности
можно установить эргодичность стационарного в широком смысле процесса
200
по математическому ожиданию: для этого достаточно, чтобы СПМ была непрерывна в точке f 0 .
Иногда для практических целей нет необходимости знать точный вид
АКФ и СПМ, и можно ограничиться простейшими числовыми характеристиками временны́х и спектральных свойств процесса, в роли которых выступают соответственно интервал корреляции и эффективная ширина спектра.
Интервал корреляции определяют по-разному, в частности, известны следующие определения.
1. Интервал корреляции – такое значение , при котором АКФ спадает
до заданного уровня, например, до 1/10 максимального значения, рис.
3.6, а.
2. Интервал корреляции – ширина основания прямоугольника, имеющего площадь, равную площади под графиком АКФ, рис. 3.6, б.
а
б
Рис. 3.6. К определению интервала корреляции
Эффективную ширину спектра случайного процесса определяют по
спектральной плотности мощности способами, аналогичными показанным на
рис. рис. 3.6, а и рис. 3.6, б.
Интервал корреляции – это временной промежуток между отсчётами
процесса, которые можно считать некоррелированными. Чем быстрее убывает АКФ, тем более протяжённой (по частотной оси) является СПМ процесса
(это вытекает из свойства преобразования Фурье). Поэтому процессы с малым интервалом корреляции – это широкополосные (быстрые) процессы. И
наоборот – узкополосные процессы характеризуются медленно убывающими
АКФ и большими интервалами корреляции.
201
Очень часто используют следующие две модели стационарных случайных процессов.
Пример 3.2.
Белый шум. Так называется стационарный случайный про-
цесс с нулевым средним, имеющий АКФ вида
Rx ( )
N0
) .
2
Очевидно, в этом случае СПМ постоянна на всех частотах от до
Wx ( f ) N 0 / 2 .
(Принято использовать обозначение N 0 / 2 для двусторонней СПМ; односторонняя обозначается N 0 ).
Легко видеть, что никакой реальный случайный процесс не может быть
белым шумом, т.к. белый шум имеет бесконечную дисперсию (мощность).
Следует также отметить, что для белого шума теряет смысл понятие плотности распределения. Однако эта модель чрезвычайно удобна в анализе вследствие -образности АКФ, поэтому она широко используется. ◄
Пример 3.3.
Квазибелый шум (шум, белый в ограниченной полосе ча-
стот от Fв до Fв ), рис. 3.7,а. Такой процесс имеет нулевое среднее и СПМ
вида
N / 2
при f Fв ,
Wx ( f ) 0
0 в противном случае.
АКФ квазибелого шума согласно теореме Винера – Хинчина имеет вид
N
Rx ( ) 0
2
Fв
Fв
cos(2 f )df Fв N 0
sin(2 Fв )
,
2 Fв
показанный на рис. 3.7, б. Особенность этого процесса заключается в том,
что график его АКФ пересекает ось времени в точках, кратных 1 / 2Fв . Таким образом, дискретизация квазибелого шума с шагом Td 1 / 2 Fв , определяемым теоремой отсчётов, дает последовательность некоррелированных
202
случчайных вееличин. В частностти, если квазибелы
к
ый шум яввляется гауссовски
г
им
проц
цессом, то
т его отссчеты, взяятые с шаагом Td , оказываю
ются незаависимым
ми,
что упрощаетт анализ (см.,
(
напрример, п. 9.3).◄
N0 / 2
Wx ( f )
f
Fв
Fв
а
б
Рис.
Р 3.7. СПМ
М (а) и АКФ
Ф (б) квазибелого шумаа
33.4. Воздей
йствие ССП
С
на Л
ЛИС-цепи
и
Рассмаатривая во
оздействи
ие стацио
онарного (здесь и далее – в широкоом
смы
ысле) слуучайного процессса на ЛИС-цепь
Л
реляционн
нов рамкках корр
спекктральной
й теории, достаточчно интер
ресоватьсяя только моментам
ми не выш
ше
вторрого поряядка. Отссюда следдует, что при возд
действии ССП x(t ) на ЛИ
ИСцепьь с КЧХ H ( f ) и импульсн
и
ой h(t ) моожно ставить задаачу
ой характтеристико
найтти среднеее значен
ние (матем
матическое ожидаание) и А
АКФ выхо
одного прроцессса y (t ) , а также вззаимно коорреляционные фу
ункции R xy ( ) и R yx ( ) прроцесссов x(t ) и y (t ) .
В задач
че анализза ЛИС-ц
цепи при стационар
с
рном слуучайном воздейств
в
ии
в каачестве входного
в
ривается процесс с нулевы
ым
процессаа обычно рассматр
сред
дним. Ессли матем
матическоое ожидаание вход
дного прроцесса (постоянн
(
ное
вслеедствие сттационар
рности) оттлично отт нуля, mx 0 , всеегда можн
но рассмоотретьь прохожд
дение чер
рез ЛИС--цепь постоянной и флюктууационно
ой составлляющи
их отделььно. Очевидно, м
математич
ческое ож
жидание ввыходногго процессса
п
, что на вход
в
цепи
и с КЧХ H ( f ) во
оздействуует
m y H (0) mx . Далее полагаем,
2
203
стационарный
Rx ( )
Wx ( f )e
процесс
j 2 f
x(t )
с
нулевым
средним
и
АКФ
df .
Каждая реализация процесса y (t ) получается свёрткой реализации (t )
процесса x(t ) с импульсной характеристикой ЛИС-цепи, или, что то же самое, обратным преобразованием Фурье произведения КЧХ цепи H ( f ) на
спектральную плотность ( f ) входной реализации (t )
(t ) H ( f ) (t1)e j 2 ft1 dt1 e j 2 ft df .
H ( f )( f )e
j 2 ft
df .
(Здесь, как и в п. 3.3, следует иметь в виду, что интеграл в фигурных скобках
в классическом смысле расходится).
Переходя от реализаций к процессам, можно записать
y (t )
H ( f ) X ( f )e
j 2 ft
df
Y ( f )e
j 2 ft
df ,
где Y ( f ) – случайная функция частоты (тот же случайный процесс y (t ) ,
представленный в другом «базисе»). Заметим, что из x(t ) 0 следует
X ( f ) 0 и далее Y ( f ) 0 .
Автокорреляционная функция процесса y (t )
Ry ( ) y* (t ) y(t )
H
*
*
( f ) X ( f )e
j 2 ft
df
H ( f1)X ( f1)e
j 2 f1t j 2 f1
e
df1
204
H ( f ) X ( f1) X * ( f )e j 2 ( f1 f )t e j 2 f1 dfdf1 .
2
Учитывая (3.13), запишем
R y ( )
2
H ( f ) Wx ( f )e
j 2 f
df
Wy ( f )e
j 2 f
df .
Из последнего выражения следует, что отклик ЛИС-цепи на стационарный случайный процесс имеет спектральную плотность мощности, равную входной СПМ, умноженной на квадрат модуля КЧХ (то есть на квадрат
АЧХ) цепи:
2
W y ( f ) H ( f ) Wx ( f ) .
(3.16)
Это выражение описывает спектральный метод анализа ЛИС-цепей
при случайных стационарных воздействиях.
Поскольку частотные функции в (3.16) умножаются, то соответствующие временные функции подвергаются свёртке
R y ( ) Rh ( ) Rx ( ) .
Здесь временнáя функция Rx ( ) соответствует спектральной плотности мощности Wx ( f ) входного процесса, а Rh ( ) связана с квадратом АЧХ:
Rh ( )
2 j 2 f
H( f ) e
df
H ( f )H
*
( f )e j 2 f df .
(3.17)
Заметим, что H ( f ) – преобразование Фурье импульсной характеристики h(t ) , вещественной по предположению. Тогда H * ( f ) соответствует
функции h(t ) . Действительно, согласно теореме обращения (см. п. 2.10.2)
h(t ) H ( f ) , а для вещественных функций H ( f ) H * ( f ) . Умножению
205
частотных функций в правой части выражения (3.17) соответствует свёртка
их временны́х прообразов, поэтому
h(t )h(t )d ,
Rh ( ) h( ) h( )
и функцию Rh ( ) можно назвать автокорреляционной функцией импульсной
характеристики106. Заметим, что АКФ импульсной характеристики может
быть измерена при помощи коррелометра, подключенного к выходу цепи,
если на ее вход подать белый шум с единичной спектральной плотностью
мощности.
Действительно,
при
Rx ( ) ( ) ,
этом
следовательно,
R y ( ) Rh ( ) .
Взаимно корреляционная функция входного и выходного процессов
Rxy ( ) x* (t ) y(t )
*
X ( f )e
j 2 ft
df
H ( f1)X ( f1)e
j 2 f1t j 2 f1
e
df1
H ( f1) X ( f1) X
*
( f )e j 2 ( f1 f )t e j 2 f1 dfdf1
H ( f1)Wx ( f ) ( f f1)e
j 2 ( f1 f )t j 2 f1
e
dfdf1
H ( f )Wx ( f )e
j 2 f
df
h(t ) Rx ( t )dt .
Для ВКФ входного и выходного процессов выполняется свойство
Rxy ( ) R yx ( ) .
106
Заметим, что здесь имеется в виду АКФ детерминированной функции
206
Анализ распределения шума на выходе цепи в общем случае весьма
сложен, однако нередко на практике выходной процесс можно считать гауссовским. Это предположение оправданно в следующих случаях.
1.
Спектр входного процесса намного шире, чем полоса пропускания
цепи.
Процесс на выходе цепи связан с входным процессом через интеграл Дюамеля. Отсчёт выходного процесса приближенно представляется
суммой «прошлых» отсчетов входного процесса с весовыми коэффициентами, равными соответствующим значениям импульсной характеристики, причем можно учитывать не все отсчёты (которые образуют континуум), а только те, которые приближенно независимы. Количество
этих приближенно независимых отсчетов определяется как отношение
длины ИХ цепи к интервалу корреляции входного процесса, или, что то
же самое, как отношение ширины полосы частот входного процесса к
ширине полосы пропускания цепи. Согласно центральной предельной
теореме Ляпунова распределение суммы независимых случайных величин сходится к нормальному с увеличением числа слагаемых, поэтому
чем больше указанные отношения, тем ближе распределение значения
выходного процесса к нормальному. Это явление называют нормализацией широкополосного процесса узкополосной цепью.
2.
На вход ЛИС-цепи воздействует гауссовский процесс, причем не-
обязательно широкополосный.
При этом значение выходного процесса в любой момент времени
определяется как взвешенная сумма гауссовских случайных величин –
отсчётов входного процесса. Сумма гауссовских случайных величин
всегда имеет гауссово распределение независимо от числа слагаемых.
207
3.5. Безынерционные нелинейные преобразования случайных
процессов
Ранее рассматривались линейные преобразования детерминированных
колебаний и случайных процессов. Напомним, что линейными называются
преобразования, подчиняющиеся принципу суперпозиции (см. разд. 2). В
технике связи часто используются цепи, не удовлетворяющие этому принципу, т.е. нелинейные. К сожалению, общей теории нелинейных цепей и их взаимодействия с сигналами, столь же простой, как теория ЛИС-цепей, не существует. Некоторые задачи, связанные с воздействием детерминированных колебаний на нелинейные цепи, будут рассмотрены в разд. 5. Анализ многомерного распределения случайного процесса (совместной ПРВ его отсчётов)
на выходе нелинейной цепи в общем случае представляет собой крайне сложную задачу и здесь не рассматривается.
Некоторые нелинейные цепи являются безынерционными в том смысле, что мгновенное значение процесса на выходе цепи зависит только от значения входного процесса в этот же момент времени107. Кроме того, во многих практически важных задачах знание многомерного распределения не
требуется – достаточно знать распределение процесса лишь в одном временном сечении, то есть его одномерное распределение (распределение мгновенного значения случайного процесса). Таким образом, фактически нужно рассматривать нелинейное преобразование случайной величины, а такой анализ
сравнительно прост.
Нелинейная
безынерционная
цепь
описывается
характеристикой
y f ( x) , указывающей зависимость мгновенного значения y выходного
процесса y (t ) от мгновенного значения x входного процесса x(t ) . Предположим для начала, что эта зависимость монотонна, рис. 3.8,а. Обозначим одномерную ПРВ мгновенного значения входного процесса wx ( x ) , а аналогич107
Можно сказать, что безынерционная цепь не имеет памяти.
208
ную функцию для выходного процесса – w y ( y ) (индексы указывают, к какой
случайной величине относится соответствующая ПРВ). Поскольку вероятность попадания случайной величины x с плотностью wx ( x ) в бесконечно
узкий интервал ( x0 , x0 dx ) равна wx ( x0 ) dx и при этом с такой же вероятностью случайная величина y попадает в интервал ( y0 , y0 dy ) , то при любом
x и соответствующем y выполняется равенство
wx ( x) dx w y ( y ) dy .
Формально отсюда следует выражение
wy ( y ) wx ( x)
dx
,
dy
но следует учесть, во-первых, что правая часть, как и левая, должна зависеть
только от y , и, во-вторых, что ПРВ не может быть отрицательной. С учетом
сказанного можно записать
w y ( y ) wx ( y )
d ( y )
,
dy
(3.18)
где x ( y ) – функция, обратная по отношению к характеристике f () нелинейной безынерционной цепи.
Если характеристика цепи не является монотонной и содержит N
участков монотонности, рис. 3.8,б (здесь N 3 ), то формула (3.18) приобретает вид
N
wy ( y ) wx k ( y )
k 1
d k ( y )
,
dy
(3.19)
где k ( y ) – функция, обратная к характеристике нелинейности на k -м
участке монотонности.
209
y
x
а
б
Рис. 3.8. К формулам (3.18), (3.19)
3.6. Узкополосные случайные процессы
Узкополосные случайные процессы играют чрезвычайно важную роль
в теории связи, так как служат моделями модулированных сигналов, переносящих информацию, а также узкополосных (сосредоточенных по спектру)
помех, часто имеющих место в каналах связи. Кроме того, узкополосные
процессы получаются в результате полосовой фильтрации широкополосных
колебаний, поступающих, например, на вход приемного устройства от антенны. (Полосовая фильтрация применяется для выделения из этого колебания «своего» сигнала и подавления мешающих сигналов (помех) и шумов.)
Поэтому узкополосные процессы заслуживают особого внимания.
3.6.1. Комплексный случайный процесс
В п. 2.11 было показано, что узкополосный сигнал удобно представлять
в форме аналитического сигнала и/или комплексной огибающей. Переход от
высокочастотного узкополосного сигнала к его комплексной огибающей (или
паре квадратурных компонент) позволяет значительно снизить требования к
аппаратуре обработки сигналов, в частности, уменьшить частоту дискретизации, что, в свою очередь, ослабляет требования к быстродействию аналогоцифрового преобразователя и уменьшает необходимый для хранения отсчётов объем памяти. Рассматривался детерминированный сигнал, однако, как
будет показано ниже, аналогичное представление существует и для случай-
210
ных процессов. Это представление широко используется в практике приёма и
обработки сигналов.
Формирование из случайного процесса x(t ) комплексного случайного
процесса z (t ) , аналогичного аналитическому сигналу, выполняется ЛИСцепью (рис. 3.9, а) с КЧХ вида
2, f 0,
H ( f ) 1, f 0,
0, f 0.
(3.20)
Другой способ заключается в присоединении к исходному процессу мнимой
части xˆ (t ) , полученной из него с помощью фильтра Гильберта, рис. 3.9, б.
Следует отметить, что термин «комплексный случайный процесс» вообще означает случайный процесс, принимающий значения из поля комплексных чисел, но в пределах данного подраздела под этим термином мы
будем понимать не любой комплексный случайный процесс, а лишь процесс,
аналогичный аналитическому сигналу в указанном смысле.
Найдём характеристики процессов xˆ (t ) и z (t ) , полагая, что на вход цепи, изображенной на рис. 3.9, б поступает стационарный в широком смысле
случайный процесс x(t ) с нулевым средним и спектральной плотностью
мощности Wx ( f ) . Поскольку АЧХ фильтра Гильберта тождественно равна 1,
то СПМ сопряженного процесса xˆ (t ) , которую обозначим Wxˆ ( f ) , равна
Wx ( f ) . Значит, равны и автокорреляционные функции этих процессов:
x(t )
H( f )
z (t )
x(t )
x(t )
xˆ (t )
Hг ( f )
а
б
Рис. 3.9. Формирование комплексного случайного процееса
Rxˆ ( ) Rx ( ) .
(3.21)
211
Рассмотрим комплексный случайный процесс (КСП)
z (t ) x(t ) jxˆ (t ) .
(3.22)
Поскольку он формируется из процесса x(t ) фильтром с КЧХ (3.20), то его
СПМ равна
4W ( f ), f 0,
Wz ( f ) x
f 0.
0,
(3.23)
АКФ вещественного процесса x(t ) – чётная вещественная функция,
поэтому его СПМ Wx ( f ) также чётна и вещественна; её можно записать в
виде
Wx ( f )
1
Wz ( f ) Wz ( f ) ,
4
(3.24)
(это выражение понадобится в дальнейшем). Отметим, что Wz ( f ) – вещественная неотрицательная правосторонняя108 функция.
Используя теорему Винера–Хинчина, найдём АКФ процесса z (t ) :
Rz ( ) 4 Wx ( f )e j 2 f df
0
4 Wx ( f )cos(2 f )df j 4 Wx ( f )sin(2 f )df .
0
(3.25)
0
Вспомним, что в п. 2.11 условие равенства нулю спектральной плотности аналитического сигнала при отрицательных частотах привело к тому, что
вещественная и мнимая части аналитического сигнала оказались связанными
парой преобразований Гильберта. Поэтому из (3.23) следует, что АКФ комплексного случайного процесса имеет вид аналитического сигнала, то есть
вещественная и мнимая части АКФ процесса z (t ) связаны парой преобразований Гильберта. Это подтверждается и выражением (3.25), из которого вид108
Правосторонними называют функции, равные 0 при отрицательных значениях аргумента. Аналогично
определяются левосторонние функции.
212
но, что мнимая часть АКФ образуется из вещественной поворотом каждой её
гармонической составляющей на 90º. Поэтому можно записать
Rz ( ) 2 Rx ( ) j 2 Rˆ x ( ) ,
(3.26)
где Rx ( ) 2 Wx ( f )cos(2 f )df – АКФ исходного процесса x(t ) .
0
Отметим, что вещественная часть АКФ КСП (3.25) является чётной
вещественной функцией, как сумма косинусоид; мнимая часть – вещественная нечётная функция, как сумма синусоид.
Можно определить АКФ комплексного СП z (t ) и непосредственно в
виде
Rz ( ) z* (t ) z (t ) [ x(t ) jxˆ (t )][ x(t ) jxˆ (t )]
x(t ) x(t ) xˆ (t ) xˆ (t ) j x(t ) xˆ (t ) j xˆ (t ) x(t )
Rx ( ) Rxˆ ( ) j[ Rxxˆ ( ) Rxx
ˆ ( )] .
(3.27)
Найдём слагаемые мнимой части. Первое слагаемое
Rxxˆ ( ) x(t ) xˆ (t ) x(t )
1
1
x( s ) x(t )
1
ds
t s
Rx ( )
d Rˆ x ( )
1
x( s )
ds
t s
Rx ( s t )
ds
(s t )
представляет собой функцию, сопряженную по Гильберту автокорреляционной функции Rx ( ) исходного процесса. Второе слагаемое мнимой части
Rz ( ) определяется аналогично:
213
Rxx
ˆ ( ) xˆ (t ) x(t )
1
1
1
x(t ) x( s )
1
ds
ts
x( s )
ds x(t )
ts
Rx (t s )
ds
ts
Rx ( )
d Rˆ x ( ) .
Таким образом, слагаем
мые мним
мой части Rz ( ) отличаю
ются тольько
знакком; учиттывая это
о, а такж
же тот фаакт, что Rxˆ ( ) R x ( ) , убееждаемсяя в
спрааведливоссти выраж
жения (3.226).
Еще рааз отмети
им, что веещественн
ная часть АКФ ком
мплексно
ого СП z (t )
являяется чётн
ной, а мн
нимая – н
нечётной функциям
ми. В часстности, отсюда
о
слледуетт, что слуучайные процессы
п
ы, сопряжёённые по Гильберрту, некор
ррелироваанны в совпадаающие мо
оменты врремени (п
при 0 ).
)
Все сказанное справедли
с
иво для любого
л
ко
омплексноого случаайного прроцессса z (t ) , оп
пределенн
ного выр ажением (3.22) (нееобязателльно узкоп
полосногго).
Если
и же исхходный веществен
нный процесс x(t ) являетсся узкополосным, то
для его реаллизаций характере
х
ен вид, напомина
н
ающий реезультат модуляции
монического несущ
щего колеебания по
о амплиту
уде и часттоте (фаззе) низкоч
чагарм
стоттными си
игналами, рис. 3.100. АКФ таакого про
оцесса так
акже имееет специф
фическкую форм
му высоко
очастотноого квазиггармонич
ческого коолебания с медлен
нно
меняяющейсяя огибающ
щей.
Рис. 3.10. Характеерный вид рреализации
и узкополоссного случчайного про
оцесса
Спектрральная плотность мощностти Wx ( f ) узкополоосного пр
роцесса x(t )
сосрредоточен
на около частот F0 и F0 , поэтом
му СПМ Wz ( f ) ко
омплекноого
2
214
процесса z (t ) заметно отличается от нуля лишь в некоторой окрестности частоты F0 . Типичный вид мнимой и вещественной частей АКФ комплексного
узкополосного СП приведен на рис. 3.11. Характерными особенностями являются их колебательный характер, чётная симметрия огибающих, а также
одинаковая частота квазигармонического заполнения, соответствующая
средней частоте СПМ процесса.
а
б
Рис. 3.11. Типичный вид вещественной и мнимой частей АКФ
комплексного СП (качественно)
3.6.2. Квадратурные компоненты узкополосного процесса
В современной технике связи часто узкополосные сигналы перед дальнейшей обработкой и демодуляцией преобразуются в квадратурные компоненты – вещественную и мнимую части комплексной огибающей. Для рационального построения устройств обработки необходимо иметь математическое описание колебаний. Поэтому здесь рассматриваются авторреляционные и взаимно корреляционные функции синфазной и квадратурной компонент узкополосного случайного процесса.
Умножая комплексный случайный процесс z (t ) со средней частотой
F0 на комплексную экспоненту частоты F0 , получим его комплексную оги-
бающую (t ) z (t )e j 2 F0t , которая представляет собой другой, низкочастотный (медленный) комплексный процесс
(t ) u (t ) jv(t ) ,
215
со спектральной плотностью мощности, сконцентрированной около нулевой
частоты; здесь u (t ), v(t ) – синфазная и квадратурная компоненты, которые
можно выразить через высокочастотные процессы x(t ) и xˆ (t ) (см. п. 2.11):
u (t ) x (t ) cos(2 F0t ) xˆ (t )sin(2 F0t ) ;
v (t ) xˆ (t ) cos(2 F0t ) x (t )sin(2 F0t ) .
Найдём автокорреляционную функцию синфазной компоненты:
Ru ( ) u (t )u (t )
x(t ) x(t )cos(2 F0t )cos[2 F0 (t )]
xˆ (t ) x (t )sin(2 F0t )cos[2 F0 (t )]
x (t ) xˆ (t )cos(2 F0t )sin[2 F0 (t )]
xˆ (t ) xˆ (t )sin(2 F0t )sin[2 F0 (t )]
Rx ( ) cos(2 F0 ) Rxxˆ ( )sin(2 F0 )
Rx ( )cos(2 F0 ) Rˆ x ( )sin(2 F0 ) .
(3.28)
Повторяя аналогичные выкладки, можно убедиться, что АКФ квадратурной компоненты имеет такой же вид:
Rx ( )cos(2 F0 ) Rˆ x ( )sin(2 F0 ) .
(3.29)
Взаимно корреляционные функции синфазной и квадратурной компонент
Ruv ( ) u (t )v(t ) Rˆ x ( )cos(2 F0 ) Rx ( )sin(2 F0 ) ,
(3.30)
Rvu ( ) v (t )u (t ) Rx ( )sin(2 F0 ) Rˆ x ( )cos(2 F0 ) .
(3.31)
Ruv ( ) Rvu ( ) .
(3.32)
Последнее равенство говорит о нечётности ВКФ. Таким образом, квадратурные компоненты некоррелированны в совпадающие моменты времени, как и
процессы x(t ) и xˆ (t ) . Однако в отличие от этих процессов квадратурные
компоненты не являются гильбертовосопряжёнными (см. упражнение
101.1.10).
216
Воспользовавшись выражениями п. 2.11
x (t ) u (t ) cos(2 F0t ) v (t )sin(2 F0t ) ,
xˆ (t ) u (t )sin(2 F0t ) v (t ) cos(2 F0t ) ,
можно выразить АКФ и ВКФ высокочастотных процессов x(t ) и xˆ (t ) через
АКФ и ВКФ квадратурных компонент:
Rx ( ) Rxˆ ( ) Ru ( )cos(2 F0 ) Ruv ( )sin(2 F0 ) ,
Rxxˆ ( ) Ru ( )sin(2 F0 ) Ruv ( )cos(2 F0 )
Rv ( )sin(2 F0 ) Rvu ( )cos(2 F0 ) Rˆ x ( ) .
Вид этих выражений согласуется со смыслом АКФ и ВКФ квадратурных компонент, как огибающих высокочастотных корреляционных функций
узкополосного процесса и его гильбертовосопряжённой версии. Напротив,
выражения (3.28)–(3.31) на первый взгляд производят впечатление высокочастотных функций, в то время как корреляционные функции квадратурных
компонент должны быть медленными (низкочастотными). Это кажущееся
противоречие исчезает, если рассмотреть полученные соотношения в частотной области, воспользовавшись преобразованием Фурье.
Согласно теореме Винера–Хинчина преобразование Фурье АКФ Rx ( )
стационарного процесса даёт его СПМ Wx ( f ) . Фурье-образ взаимно корреляционной функции Rxxˆ ( ) можно назвать взаимным спектром Wxxˆ ( f ) исходного процесса и его гильбертовосопряжённой версии. Учитывая, что
Rxxˆ ( ) Rˆ x ( ) , видим, что
j Wx ( f ), f 0;
Wxxˆ ( f ) j sgn( f )Wx ( f ) 0, f 0;
j W ( f ), f 0.
x
Выражая Wx ( f ) через Wz ( f ) , имеем мнимую нечётную функцию
Wxxˆ ( f ) j
1
Wz ( f ) Wz ( f ) .
4
(3.33)
217
Применив к выражению (3.28)
Ru ( ) Rx ( ) cos(2 F0 ) Rˆ x ( )sin(2 F0 )
преобразование Фурье, получим спектральную плотность мощности синфазной компоненты (знаком обозначена операция свёртки)
1
Wu ( f ) Wx ( f ) ( f F0 ) ( f F0 )
2
1
Wxxˆ ( f ) ( f F0 ) ( f F0 ) .
2j
Здесь учтён вид спектральных плотностей синусоиды и косинусоиды, а также теорема умножения (см. п. 2.10.2).
Подставляя сюда Wx ( f ) в форме (3.24), получим
Wu ( f )
+
1
Wz ( f ) Wz ( f ) ( f F0 ) ( f F0 ) +
8
1
Wz ( f ) Wz ( f ) ( f F0 ) ( f F0 ).
8
С учетом того, что Wz ( f ) 0 при f 0 , имеем чётную неотрицательную функцию
Wu ( f ) Wv ( f )
1
Wz ( f F0 ) Wz ( f F0 )
4
Фурье-образ взаимно корреляционной функции синфазной и квадратурной компонент
Ruv ( ) Rˆ x ( ) cos(2 F0 ) Rx ( )sin(2 F0 )
имеет вид
1
Wuv ( f ) Wxy ( f ) ( f F0 ) ( f F0 )
2
1
Wx ( f ) ( f F0 ) ( f F0 ) .
2j
Выражая Wx ( f ) и Wxxˆ ( f ) через Wz ( f ) , получим
218
Wuv ( f ) j
1
Wz ( f ) Wz ( f ) ( f F0 ) ( f F0 )
8
1
Wz ( f ) Wz ( f ) ( f F0 ) ( f F0 ).
8j
Учитывая, что Wz ( f ) 0 при f 0 , получаем
Wuv ( f ) j
1
Wz ( f F0 ) Wz ( f F0 ) .
4
Полученный взаимный спектр сосредоточен около нулевой частоты и
является мнимым нечётным, поэтому ВКФ – нечётная вещественная функция, имеющая апериодический (низкочастотный) характер. Отметим, что в
частном случае, когда СПМ комплексного узкополосного процесса имеет
вид, чётно-симметричный относительно частоты F0 , квадратурные компоненты оказываются некоррелированными при любых сдвигах по времени,
т.к. при этом Wuv ( f ) 0 .
3.6.3. Распределения огибающей и фазы узкополосного гауссовского
процесса
Для построения оптимального или хотя бы субоптимального демодулятора требуется знание плотности распределения колебания, поступающего
на демодулятор. Низкочастотное представление узкополосного случайного
процесса имеет форму комплексной огибающей, которая выражается через
квадратурные компоненты:
(t ) u (t ) jv(t ) .
Если исходный процесс x(t ) описывается гауссовской моделью (см. пример
3.4), то гауссовскими являются сопряженный процесс xˆ (t ) , а также квадратурные компоненты u (t ), v(t ) . Зная АКФ исходного процесса x(t ) , можно
найти авто- и взаимно корреляционные функции квадратурных компонент, а
следовательно, записать для них совместную плотность распределения для
любого набора временных сечений, т.е. получить их полное вероятностное
описание согласно (3.12).
219
Комплексная огибающая может быть также представлена в показательной форме (t ) A(t )e j (t ) , где A(t ) – огибающая, а (t ) – фаза случайного процесса. Огибающая и фаза связаны с синфазной и квадратурной компонентами нелинейными выражениями, поэтому их распределения отличаются от нормального. В некоторых случаях на практике используется именно
огибающая узкополосного процесса (например, при некогерентном приёме
радиосигнала, см. подробнее разд. 9), поэтому вид её распределения представляет большой практический интерес. В частности, плотность распределения вероятности огибающей узкополосного гауссовского случайного процесса необходима для анализа качества приёма (демодуляции) амплитудномодулированных сигналов на фоне шума, а также для правильного выбора
параметров демодулятора. Отметим, что здесь идёт речь лишь о распределении мгновенного значения огибающей, т.к. нахождение совместной плотности совокупности значений огибающей представляет собой слишком сложную задачу.
Предположим, что x(t ) – гауссовский узкополосный СП с нулевым
средним (это предположение на практике обычно выполняется, так как случайный процесс на входе демодулятора представляет собой результат полосовой фильтрации входного широкополосного шума, а при этом происходит
его нормализация).
В совпадающие моменты времени значения квадратурных компонент
u (t ) и v(t ) некоррелированны, а следовательно, в силу гауссовости, и независимы. Кроме того, они имеют нулевые средние и одинаковую дисперсию 2 ,
поэтому для некоторого момента времени t0 можно записать совместную
плотность распределения вероятностей отсчетов u и v квадратурных компонент
220
u2
1
2
e 2
2
w(u , v)
v2
1
1
2
e 2
e
2
2 2
u 2 v2
2 2
.
Рассматривая u и v как декартовы координаты точки на плоскости,
введём элементарную площадку dudv , которая в полярных координатах выражается, как dA Ad , где A – длина радиуса, – угол. Вероятность того,
что точка с координатами u и v попадает в элементарную площадку dudv ,
равна
P u u du, v v dv w(u , v)dudv W ( A, )dAd ,
где W ( A, ) – совместная плотность распределения вероятностей огибающей
A и фазы комплексной огибающей в момент времени t0 . Исходя из этого
очевидного равенства и выражая u и v через A и , можно записать
wu ( A, ), v( A, ) AdAd
.
dAd
W ( A, )
Здесь u ( A, ), v( A, ) – формальные обозначения обратных функций, описывающих преобразование полярных координат в декартовы, но в данном случае следует просто учесть очевидное соотношение u 2 v 2 A2 , чтобы записать совместную ПРВ
A
A2
A2
2 2 A e 2 2 1 W ( A)W ( ) .
e
A
2
2 2
2
W ( A, )
Из полученного выражения видно, что огибающая и фаза гауссовского
процесса с нулевым средним в некоторый фиксированный момент времени
представляют собой независимые случайные величины с плотностями распределения вероятностей
WA ( A)
A
2
A2
2
e 2
(3.34)
221
и
W ()
1
.
2
Плотноость (3.34
4) называеется рэлееевской (рис. 3.12, ккривая 1)). Фаза им
меет рравномерн
ное в инттервале [00,2 ) расспределен
ние. Еслии случайный процеесс
имеет ненулеевое матем
матическоое ожидаание (в зад
даче аналлиза помеехоустойч
чио означаеет наличиие полезно
ого сигнаала
востти приёмаа сигналаа на фоне шума это
в прринимаем
мом колеб
бании), тоо распред
деление вероятнос
в
стей огибающей сттанови
ится болеее сложны
ым и при
инимает вид обобщ
щённого рраспределления Рэлеея,
или распредееления Рээлея–Райсса с плотн
ностью
WA ( A)
A
2
e
A2 U 2
2 2
AU
A
I0 2
,
плитуда си
игнала, I 0 () – мод
дифициро
ованная ф
функция Бесселя
Б
н
нугде U – амп
левоого поряд
дка. Графики плотн
ности обо
общённогго распрееделения Рэлея
Р
покказаны
ы на рис. 3.12, кривые 2, 3 ( 1 ).
Рис.3.12. Распределение Рэлеяя (кривая 1)) и Рэлея–Р
Райса при U 1.2 (кр
ривая 2)
и ппри U 2.5
5 (кривая 3)
3
Распрееделение фазы (арргумента комплек
ксной огиибающей)) для этоого
случчая не явлляется раавномерны
ым; его точный ви
ид достатоочно слож
жен, но для
д
пракктики не представл
ляет интеереса и зд
десь не рассматриввается.
2
222
Контрольные вопросы
1.
Какое из утверждений правильно: 1) случайная величина – это
число; 2) случайная величина – это функция? Почему?
2. Перечислите свойства функции распределения и плотности распределения вероятностей случайной величины.
3. Что такое моменты распределения СВ?
4. Как определить энтропию распределения СВ?
5. Может ли дисперсия СВ равняться нулю?
6. Может ли математическое ожидание СВ равняться нулю?
7. Что такое корреляция и как она связана с ковариацией?
8. Что является полным описанием случайного процесса?
9. Что получится, если N -мерную совместную плотность распределения вероятностей случайного процесса проинтегрировать по ( N 1)
переменным?
10. Какой процесс называется стационарным в узком смысле?
11. Какой процесс называется стационарным в широком смысле?
12. Утверждение: «если процесс стационарен в узком смысле, то он
стационарен и в широком смысле» верно? неверно? верно для некоторых процессов (каких именно)? неверно для некоторых процессов
(каких именно)?
13. Утверждение: «если процесс стационарен в широком смысле, то он
стационарен и в узком смысле» верно? неверно? верно для некоторых процессов (каких именно)? неверно для некоторых процессов
(каких именно)?
14. Утверждение: «если случайные величины независимы, то они и некоррелированы» верно? неверно? верно для некоторых распределений (каких именно)? неверно для некоторых распределений (каких
именно)?
223
15. Утверждение: «если случайные величины некоррелированы, то они
и независимы» верно? неверно? верно для некоторых распределений
(каких именно)? неверно для некоторых распределений (каких
именно)?
16. Какие процессы называются эргодическими?
17. Как связаны АКФ и СПМ стационарного случайного процесса?
18. Что такое белый шум? Какова его АКФ? Какова его СПМ?
19. Как связана СПМ процесса на выходе ЛИС-цепи с СПМ процесса на
входе?
20. Какую ПРВ имеют огибающая и фаза гауссовского узкополосного
случайного процесса?
Упражнения
1.
Докажите, что процесс, стационарный в узком смысле, стационарен и
в широком смысле.
2.
Реализации случайного процесса представляют собой функции времени cos(t ) , t , при некотором фиксированном значении
и случайной начальной фазе , имеющей распределение, равномерное
в интервале (0, 2 ) . Проверьте, является ли этот процесс стационарным и эргодическим.
3.
Мгновенное значение случайного процесса имеет распределение вероятностей с плотностью вида w( x) C exp(0.5 x ) . Найдите константу C , математическое ожидание и дисперсию. Постройте графики
плотности распределения вероятностей и функции распределения вероятностей (друг под другом в одном масштабе).
4.
Мгновенное значение случайного процесса описывается функцией
распределения F ( x) 1 exp(2 x) . Найдите плотность распределения
вероятностей, математическое ожидание, дисперсию. Постройте гра-
224
фики плотности распределения вероятностей и функции распределения вероятностей (друг под другом в одном масштабе).
5.
Функция автокорреляции стационарного случайного процесса имеет
вид Bx ( ) Dx e
a
, где a – некоторая постоянная. Найдите спек-
тральную плотность мощности случайного процесса.
6.
Множество всех случайных величин, определенных функциями на
общем пространстве элементарных событий , можно рассматривать
как линейное пространство с обычным сложением и умножением на
вещественный скаляр. Роль нулевого вектора в рассматриваемом пространстве играет случайная величина, которая принимает значение 0 с
вероятностью 1 (ПРВ такой случайной величины равна ( x) ). Какая
операция над плотностями распределения вероятностей соответствует
сложению случайных величин?
7.
Покажите, что выражение (3.18) справедливо, если функция y f ( x)
монотонно убывает.
8.
Докажите справедливость выражения (3.19) для немонотонных функций.
9.
Докажите, что из выражения (3.32) следует нечётность ВКФ синфазной и квадратурной компонент.
10. Докажите, что квадратурные компоненты узкополосного стационарного случайного процесса не являются гильбертовосопряжёнными.
11. Выведите выражение (3.29).
225
4. МЕТОДЫ АНАЛИЗА ЛИС-ЦЕПЕЙ
Задача анализа заключается в нахождении выходного сигнала по заданному входному сигналу и известному описанию цепи. Не существует метода решения этой задачи, подходящего для всех цепей – линейных и нелинейных, стационарных и нестационарных. Наиболее хорошо развиты в
настоящее время методы анализа линейных инвариантных к сдвигу цепей.
Невыполнение требований линейности и стационарности (или хотя бы одного из них) приводит к затруднениям в решении задачи анализа.
Как было показано в разд. 2, сигнал на выходе ЛИС-цепи может быть
найден точно, если известно описание цепи в форме импульсной или комплексной частотной характеристики (функциональное описание [23]). Часто
цепь описывается другими (структурными) способами (принципиальной
схемой, дифференциальным уравнением и т.п.). Поскольку любая форма исчерпывающего описания определяет одну и ту же цепь, существует внутренняя связь между этими формами, и выяснение этой связи также относят к
задаче анализа109. В этом смысле все точные методы анализа эквивалентны
друг другу. В основе всякого приближённого метода лежит какое-нибудь
упрощающее предположение, поэтому такие методы могут приводить к различным решениям, однако эти различия должны мало110 отличаться от точного решения.
Точными методами анализа ЛИС-цепей являются метод, основанный
на решении дифференциального уравнения цепи, операторный и спектральный методы, метод комплексной огибающей. Они являются точными и универсальными в том смысле, что позволяют в принципе решить задачу анализа
точно при любой ЛИС-цепи и любом воздействии. Однако во многих практически важных случаях точное решение оказывается слишком трудоемким.
109
Согласно [23], анализ заключается в нахождении функционального описания цепи по известному её
структурному описанию; нахождение структурного описания по заданному функциональному составляет
существо задачи синтеза
110
В каждом конкретном случае нужно определить количественную меру отличия и количественный критерий малости.
226
В то же время некоторые дополнительные сведения о сигнале и цепи могут
существенно упростить анализ и привести к результату хотя и приближенному, но достаточно близкому к точному решению с практической точки зрения. К приближенным относятся метод мгновенной частоты (см. п. 5.7.2) и
некоторые другие. В этом разделе кратко рассматриваются точные методы
анализа ЛИС-цепей.
4.1. Метод, основанный на решении дифференциального уравнения
Дифференциальные уравнения вообще связывают значения некоторых
физических величин со скоростями их изменения, скоростями изменения
скоростей (ускорениями) и т.д. Эти связи, выраженные в форме дифференциальных уравнений, отражают объективные физические законы, которым подчиняется реальный мир. Линейные стационарные цепи с сосредоточенными
параметрами описываются наиболее простыми дифференциальными уравнениями – обыкновенными111 линейными дифференциальными уравнениями
(ДУ) с постоянными коэффициентами112 вида
an
d n y (t )
dt n
... a0 y (t ) bm
d m x(t )
dt m
... b0 x(t ) ,
(4.1)
где x(t ) – входной сигнал, y (t ) – выходной сигнал, а целые числа n и m
определяются сложностью цепи. Отметим, что левая и правая части линейного ДУ представляют собой линейные комбинации соответственно выходного
и входного сигналов и их производных. Если это условие не выполнено,
уравнение является нелинейным и описывает нелинейную цепь.
Если входной сигнал задан, то тем самым задана вся правая часть
уравнения (4.1), которую можно обозначить f (t ) . Тогда уравнение можно
записать в виде
111
В отличие от обыкновенных ДУ дифференциальными уравнениями в частных производных описываются
цепи с распределенными параметрами
112
Если коэффициенты ДУ зависят от времени, цепь является нестационарной
227
an
d n y (t )
dt n
... a0 y (t ) f (t ) ,
(4.2)
при этом число n определяет порядок дифференциального уравнения. Знание уравнения, описывающего цепь, а также состояния цепи113 в начальный
момент времени (начальных условий), позволяет найти состояние цепи в любой будущий момент времени (цепь считается каузальной, т.е. её поведение
не зависит от будущих значений входного и выходного сигналов). Уравнение
(4.2) имеет ненулевую правую часть и называется неоднородным; его решение представляет собой сумму некоторого частного решения неоднородного
уравнения и общего решения однородного уравнения
an
d n y (t )
dt
n
... a0 y (t ) 0 .
(4.3)
Для решения однородного дифференциального уравнения (4.3) нужно
решить алгебраическое характеристическое уравнение цепи
an n an 1 n 1 ... a1 a0 0 .
(4.4)
Если коэффициенты уравнения вещественны (а обычно это так), то
корни либо вещественны, либо образуют комплексно-сопряжённые пары.
При этом некоторые корни могут совпадать (быть кратными). Для случая,
когда все корни 1, 2 ,..., n являются различными (простыми), общее решение однородного дифференциального уравнения (4.3) описывает собственные колебания цепи и имеет вид
y (t ) C1e 1t C2e 2t ... Cn e n t ,
где постоянные C1, C2 ,..., Cn определяются начальными условиями. В случае
кратных корней в решении присутствуют с соответствующими весовыми коэффициентами слагаемые вида e k t , te k t ,..., t m 1e k t , где k – корень (кратности m ) характеристического уравнения (4.4). Заметим, что для устойчивости
113
Состояние цепи определяется набором величин y(t ) , dy(t )/ dt , ... , dy n (t )/ dt n в один и тот же момент
времени.
228
цепи свободные колебания должны затухать со временем, а отсюда следует,
что все корни характеристического уравнения должны иметь отрицательные
вещественные части (то есть лежать в левой половине комплексной плоскости).
Метод анализа, основанный на решении дифференциального уравнения, может использоваться для нахождения отклика несложных ЛИС-цепей
на простые воздействия (например, функцию включения, и т.п.). В более
сложных случаях этот метод применяется редко.
Пример 4.1. Для RC-фильтра нижних частот (см. пример 2.18), обозна-
чая ток, протекающий через емкость, i (t ) , входное и выходное напряжения
uвх (t ) и uвых (t ) и учитывая, что i (t ) Cduвых (t ) / dt , запишем неоднородное
дифференциальное уравнение
uвх (t ) RCduвых (t ) / dt uвых (t ) .
Соответствующее
однородное
уравнение
имеет
вид
duвых (t ) / dt uвых (t ) 0 , где RC – постоянная времени. Характеристическое уравнение 1 0 имеет единственный корень 1 / . Общее решение однородного уравнения, описывающее свободные колебания на выходе цепи, имеет вид uвых (t ) Ce t / , где C определяется некоторым частным
решением неоднородного уравнения и начальными условиями. Если входное
напряжение описывается функцией включения, частным решением неоднородного уравнения является установившаяся реакция цепи, равная функции
включения. Тогда решение неоднородного уравнения имеет вид
uвых (t ) Ce t / (t ) .
Начальным условием для уравнения является условие uвых (0) 0 , откуда C 1 , таким образом, отклик RC-фильтра нижних частот на функцию
включения, называемый переходной характеристикой, равен g (t ) 1 e t / .
◄
229
4.2. Спектральный метод
Предположим, что на вход ЛИС-цепи, описываемой дифференциальным уравнением (4.1), воздействует комплексное гармоническое колебание
вида x (t ) e j t , где – круговая частота колебания. Как было показано в
разд. 2, сигнал на выходе ЛИС-цепи при таком воздействии равен
y (t ) H ( )e jt , где H ( ) – значение КЧХ на частоте . Подставляя x(t ) и
y (t ) в уравнение (4.1) и решая полученное алгебраическое уравнение относительно H ( ) , получаем комплексную частотную характеристику, выраженную через коэффициенты дифференциального уравнения цепи
H ( )
m
m 1
n
n 1
bm j bm 1 j
an j an 1 j
... b1 j b0
... a1 j a0
.
Таким образом, зная дифференциальное уравнение, описывающее
ЛИС-цепь, можно для нахождения выходного сигнала воспользоваться спектральным методом, для чего найти спектральную плотность X ( ) входного
сигнала, умножить её на КЧХ, а от полученной спектральной плотности
Y ( ) выходного сигнала перейти к его временному представлению путем
обратного преобразования Фурье.
Пример 4.2. КЧХ фильтра нижних частот, рассмотренного в примере
4.1, равна H ( ) 1 / 1 j RC . Рассматривая в качестве входного сигнала
-функцию со спектральной плотностью, тождественно равной 1, имеем спектральную плотность выходного сигнала Y ( ) 1 / 1 j RC , откуда обратным
преобразованием
Фурье
находится
импульсная
характеристка
1
h(t ) et / , равная производной переходной характеристики. ◄
230
4.3. Операторный метод
Операторный метод114 основан на символической замене оператора
дифференцирования множителем, который принято обозначать буквой p .
При этом функции времени x(t ) и y (t ) должны быть заменены их изображениями X ( p ) и Y ( p) , определяемыми преобразованием Лапласа115
X ( p) x(t )e
pt
dt ,
0
Y ( p ) y (t )e pt dt .
0
При таком допущении дифференциальное уравнение (4.1) преобразуется в алгебраическое уравнение
an p nY ( p ) ... a1 pY ( p ) a0Y ( p ) bm p m X ( p ) ... b1 pX ( p ) b0 X ( p ) .
Вводя операторную передаточную функцию K ( p) формулой
K ( p)
Y ( p)
,
X ( p)
получаем
K ( p)
bm p m bm 1 p m 1 ... b1 p b0
n
an p an 1 p
n 1
... a1 p a0
.
Таким образом, нахождение выходного сигнала ЛИС-цепи операторным методом сводится к следующим шагам:
− переход от входного сигнала x(t ) к его лапласовскому изображению
X ( p) ;
− нахождение изображения выходного сигнала Y ( p ) K ( p ) X ( p ) ;
− переход от изображения Y ( p) к выходному сигналу y (t ) путем обратного преобразования Лапласа
114
Операторный метод был в основном разработан Оливером Хэвисайдом (1850 – 1925), выдающимся английским инженером и математиком (подробнее см., например, [23Ошибка! Источник ссылки не
найден.])
115
Это одностороннее преобразование Лапласа определено для функций, равных нулю при t < 0 и растуst
щих при t ¥ не быстрее чем e 0 , при s > s0 [23]. Пьер Симон Лаплас (1749–1827) – знаменитый французский математик, физик и астроном, один из создателей теории вероятностей
231
y (t )
1
2 j
c j
Y ( p )e pt dt ,
c j
где c – константа, которая должна быть больше абсциссы абсолютной сходимости [23].
Легко видеть, что передаточная функция ЛИС-цепи получается из её
КЧХ путем замены j p j (что соответствует аналитическому
продолжению функции, заданной на мнимой оси комплексной плоскости, на
всю комплексную плоскость). Верно и обратное: зная передаточную функцию ЛИС-цепи, путем замены p j (сужения функции комплексного переменного на мнимую ось комплексной p -плоскости) можно получить КЧХ:
H ( ) K ( j ) . С учётом того, что для многих функций лапласовские изображения давно найдены и сведены в таблицы, операторный метод анализа
ЛИС-цепей оказывается во многих случаях самым простым. Подробное обсуждение операторного метода с многочисленными примерами можно найти
в [23].
Пример 4.3. Передаточная функция RC-фильтра нижних частот равна
K ( p)
1
1/
, а изображение -функции равно 1. Перемножая,
1 p p 1 /
получим Y ( p)
1/
. В таблице преобразований Лапласа [23] есть изобp 1/
ражение 1 / ( p ) e t . Полагая 1 / , получаем отклик на -функцию
1
(импульсную характеристику) вида h(t ) et / . ◄
4.4. Метод комплексной огибающей
Метод комплексной огибающей обычно применяется для анализа частотно-избирательных цепей (ЧИЦ) при узкополосных воздействиях. Именно
эта ситуация имеет место в приемных устройствах, где модулированные уз-
232
кополосные колебания воздействуют на частотно-избирательные ЛИС-цепи
(фильтры).
Узкополосный сигнал x(t ) со средней частотой F0 можно выразить через его комплексную огибающую (t ) следующим образом (см. разд. 2):
x(t ) Re (t )e j 2 F0t
1
(t )e j 2 F0t * (t )e j 2 F0t ,
2
поэтому спектральная плотность X ( f ) сигнала x(t ) может быть записана в
виде
1
X ( f ) f F0 * f F0 ,
2
(4.5)
где ( f ) – спектральная плотность комплексной огибающей (t ) .
Импульсная характеристика h(t ) частотно-избирательной цепи (полосового фильтра с центральной частотой F0 ), рассматриваемая как сигнал,
также имеет узкополосный характер и может быть представлена в форме
1
h(t ) Re (t )e j 2 F0t (t )e j 2 F0t * (t )e j 2 F0t ,
2
поэтому КЧХ такой цепи можно записать в виде
1
H ( f ) f F0 * f F0 .
2
(4.6)
Тогда спектральная плотность Y ( f ) сигнала y (t ) на выходе фильтра
равна
Y( f ) H f X f
1
f F0 f F0 * f F0 * f F0 .
4
(4.7)
Здесь учтено то обстоятельство, что функции f F0 и f F0
равны нулю при f 0 , а функции * f F0 и * f F0 при f 0 .
Для приведения (4.7) к виду, аналогичному выражениям (4.5), (4.6) запишем
233
1
Y ( f ) f F0 * f F0 ,
2
где ( f ) – спектральная плотность комплексной огибающей (t ) выходного
сигнала
1
y (t ) Re (t )e j 2 F0t (t )e j 2 F0t * (t )e j 2 F0t .
2
(4.8)
1
Заметим, что при этом f f f , откуда следует, что ком2
плексная огибающая выходного сигнала может быть найдена, как свёртка
(t ) (t ) 12 (t )
комплексной огибающей (t ) входного сигнала и (комплексной) импульсной
характеристики
1 (t ) .
2
Цепь с такой ИХ называется низкочастотным эквива-
лентом частотно-избирательной цепи. Заметим, что с точностью до множителя ½ импульсная характеристика НЧ эквивалента совпадает с комплексной
огибающей импульсной характеристики ЧИЦ.
Таким образом, для нахождения отклика ЧИЦ на узкополосный сигнал
достаточно вычислить свертку (интеграл Дюамеля) комплексных огибающих
входного сигнала и импульсной характеристики фильтра, умножить результат на ½ и затем найти выходной сигнал согласно выражению (4.8).
В заключение следует отметить, что в литературе метод комплексной
огибающей иногда относят к приближённым методам анализа. Это связано с
использованием при анализе воздействия узкополосного процесса на колебательный контур приближенного описания резонансной кривой (характеристики колебательного контура), см. напр. [9].
Контрольные вопросы
1.
Где на комплексной плоскости должны располагаться корни характеристического уравнения устойчивой цепи?
234
2.
Как связана комплексная частотная характеристика ЛИС-цепи с ее
передаточной функцией?
3.
Как связаны характеристики частотно-избирательной цепи и ее
низкочастотного эквивалента?
Упражнения
1. Составьте дифференциальное уравнение RC -фильтра верхних частот (дифференцирующей цепочки). Выведите КЧХ и передаточную
функцию цепи. Найдите импульсную характеристику цепи.
2. Составьте дифференциальное уравнение последовательного колебательного контура. Выведите КЧХ и передаточную функцию, рассматривая напряжение на ёмкости в качестве выходного.
235
5. ПРИНЦИПЫ МОДУЛЯЦИИ И ДЕМОДУЛЯЦИИ
Модуляция – это изменение одного или нескольких параметров колебания, называемого несущим колебанием (переносчиком), в соответствии с изменениями первичного (информационного) сигнала. При этом спектр (спектральная плотность) получаемого модулированного сигнала отличается от
спектров как первичного сигнала, так и переносчика. Иногда такое изменение спектра является одной из целей модуляции: например, речевой сигнал в
системах телефонии занимает полосу частот от 300 до 3400 Гц и его непосредственная передача по каналу радиосвязи невозможна, т.к. размеры антенны, эффективно излучающей радиоволны столь низких частот, были бы
слишком велики для практического применения. В результате амплитудной
модуляции таким низкочастотным сигналом гармонического несущего колебания
с
частотой,
например,
100
МГц,
получается
амплитудно-
модулированный (АМ) сигнал, занимающий полосу частот от 99996600 до
100003400 Гц, излучение которого не составляет проблемы при умеренных
размерах антенны.
Важно отметить, что при модуляции происходят такие преобразования
первичного сигнала, которые сопровождаются появлением новых частотных
составляющих, отсутствовавших в спектре исходного сигнала. Практически
во всех случаях после такого обогащения спектра (ОС) производится частотная фильтрация (ЧФ) при помощи подходящей ЛИС-цепи для подавления
ненужных или вредных спектральных составляющих, рис. 5.1. При помощи
одних только ЛИС-цепей модуляцию осуществить невозможно. То же относится к демодуляции116.
Действительно, предположим, что на вход ЛИС-цепи поступает периодический сигнал x(t )
k
Ck e
j
2
kt
T
. Действие ЛИС-цепи на комплексную
экспоненту определённой частоты сводится к ее умножению на комплексное
116
Специальный случай демодуляции при помощи ЛИС-цепи будет особо рассмотрен позднее (п. 5.9)
236
число, равное значению КЧХ цепи на данной частоте. Ясно, что спектральные составляющие исходного сигнала могут исчезать в результате такой
фильтрации, но не появляться, если их изначально не было. Очевидно, что и
для непериодических сигналов справедливо то же самое. Обогащение спектра сигнала новыми частотами возможно при использовании нелинейных или
линейных нестационарных (параметрических) цепей. Напомним, что нелинейными называются цепи, для которых не выполняется принцип суперпозиции. Для линейных нестационарных цепей указанный принцип выполняется,
однако оператор цепи зависит от времени, вследствие чего в спектре сигнала
могут появляться новые частотные составляющие.
x (t )
y (t )
ОС
ЧФ
Рис. 5.1. Принцип преобразования спектра колебания
5.1.
Линейные нестационарные цепи
В п. 2.8 было показано, что сигнал на выходе линейной цепи находится
как результат действия на входной сигнал x(t ) линейного оператора L
,
что выражается в форме интеграла
y (t ) L x(t ) L x( ) (t )d x( )L (t )d
x( )h(t , )d .
(5.1)
Здесь весовая функция (ядро оператора) h(t , ) L (t ) представляет собой отклик цепи в момент t на входной сигнал в виде -функции,
воздействующий на цепь в момент . Для дальнейшего удобнее представить
отклик линейной цепи в виде, получаемом заменой переменной
237
y (t )
x(t )h(t , t )d .
(5.2)
Подставим в выражение (5.2) в качестве входного сигнала комплексную гармоническую функцию e j 2 ft , тогда отклик цепи
y (t )
e
j 2 f (t )
h(t , t )d e
j 2 ft
e
j 2 f
h(t , t )d
H ( f , t )e j 2 ft .
Таким образом, отклик линейной нестационарной цепи на комплексное
гармоническое воздействие описывается выражением
y (t ) H ( f , t )e j 2 ft ,
где H ( f , t )
h(t , t )e
j 2 f
d – функция, внешне аналогичная ком-
плексной частотной характеристике ЛИС-цепи. Однако эта функция зависит
не только от частоты, но и от времени и не играет такой фундаментальной
роли в анализе, как КЧХ ЛИС-цепи. Тем не менее, она может быть полезна
для решения задач, связанных с изучением линейных нестационарных (параметрических) цепей. В частности, можно записать
H ( f , t ) K ( f , t ) e j ( f ,t ) ,
таким образом, при комплексном гармоническом воздействии e j 2 f0t фиксированной частоты f0 отклик имеет форму
у (t ) K ( f 0 , t )e j[2 f0t ( f 0 ,t )] ,
откуда видно, что множитель K ( f 0 , t ) описывает изменение во времени амплитуды выходного колебания, а слагаемое ( f 0 , t ) – изменение начальной
фазы. Следовательно, линейные нестационарные цепи могут применяться
для получения амплитудно-модулированных и фазомодулированных колебаний.
238
Подставив в (5.2) выражение входного сигнала в виде обратного преобразования Фурье, получим
y (t )
X ( f )e j 2 f (t ) h(t , t )df d
X(f )
h(t , t )e
j 2 f
d e
j 2 ft
df
X ( f ) H ( f , t )e j 2 ft df . (5.3)
Хотя произведение X ( f ) H ( f , t ) формально находится под интегралом
в обратном преобразовании Фурье, оно не может считаться спектральной
плотностью сигнала y t , т.к. зависит от времени (ср. выражение (2.38)).
5.2.
Воздействие гармонического колебания на параметрическую цепь
Простейшая линейная параметрическая цепь, которую можно исполь-
зовать для обогащения спектра, представляет собой активное сопротивление,
меняющееся во времени по некоторому периодическому закону. Удобнее в
качестве изменяющегося параметра рассмотреть не сопротивление, а проводимость s (t ) , так что под воздействием напряжения u (t ) через параметрический элемент протекает ток i (t ) u (t ) s (t ) , рис. 5.2, а. Проводимость s (t )
можно трактовать, как переменную крутизну линейной вольтамперной характеристики параметрического элемента, рис. 5.2, б.
Рассмотрим ситуацию, когда напряжение и крутизна изменяются по
гармоническим законам с разными частотами
u (t ) U cos(1t 1 ) ,
s (t ) S0 S1 cos(2t 2 ) .
Очевидно, спектр напряжения содержит одну гармоническую составляющую (гармонику) с частотой 1 2 f1 , а спектр функции s (t ) – две составляющие с частотами 0 и 2 2 f 2 .
239
i
i (t )
u (t )
s (t )
u
а
б
Рис. 5.2. Воздействие переменного напряжения на линейный параметрический элемент
Ток, протекающий через параметрический элемент, равен сумме гармонических составляющих (гармоник), амплитуды и начальные фазы которых образуют соответственно амплитудный и фазовый спектры:
i (t ) US0 cos(1t 1 ) US1 cos(1t 1 ) cos(2t 2 )
US0 cos(1t 1)
US1
cos (1 2 )t 1 2
2
US1
cos (1 2 )t 1 2 .
2
(5.4)
Как видно из полученного выражения, в спектре тока присутствуют
гармонические составляющие с частотой 1 , а также с суммарной 1 2 и
разностной 1 2 частотами. Эти новые частоты называются комбинационными. (Если напряжение и крутизна изменяются по негармоническим, но периодическим законам, их можно представить рядами Фурье и рассчитать
спектральные коэффициенты тока, раскрывая произведения косинусов и/или
синусов по тригонометрическим формулам.)
Наличие в спектре колебания составляющих с суммарной и разностной
частотами позволяет использовать параметрические цепи для переноса спектра. В самом деле, подавая ток, описываемый выражением (5.4), на частотно-избирательную нагрузку (полосовой фильтр), можно получить на выходе
напряжение частоты 1 2 или 1 2 , в зависимости от настройки филь-
240
тра. Таким образом, получаем перенос гармонического колебания частоты 1
на величину 2 вправо или влево по частотной оси.
На практике перенос частоты гармонического колебания, как правило,
не представляет интереса; чаще сигнал, подлежащий преобразованию, является узкополосным (таковы практически все модулированные сигналы), т.е.
имеет спектр, сосредоточенный в узкой полосе частот. После умножения
сигнала на s (t ) при помощи фильтра выделяется спектр такой же формы, но
сдвинутый по частоте на 2 вверх или вниз. Для того, чтобы можно было
выделить сдвинутый сигнал, величина 2 должна быть существенно больше
ширины спектра сигнала (это необходимо, чтобы спектры исходного и сдвинутого сигналов не перекрывались на частотной оси, лишь тогда их разделение путём фильтрации будет возможно). Частными случаями переноса спектра являются преобразование частоты, применяемое при супергетеродинном приеме (см. пример 5.1), а также амплитудная модуляция гармонического переносчика и синхронное детектирование АМ-сигналов.
5.3.
Нелинейные цепи
Цепи, не удовлетворяющие принципу суперпозиции, называются нели-
нейными. К сожалению, в литературе, в том числе учебной, нередко встречается ошибочное утверждение о том, что цепь является нелинейной, если «в
неё входит хотя бы один нелинейный элемент» (см., напр., [24]). Кроме того,
что это «определение» представляет собой порочный круг117, оно принципиально неверно, так как в действительности возможно включение в цепь сколь
угодно большого количества нелинейных элементов, компенсирующих друг
друга так, что цепь в целом является линейной. Одним из простейших примеров может служить цепь, состоящая из двух каскадно включенных нелинейных безынерционных звеньев, характеристики которых являются взаимно
обратными функциями, например, arctg() и tg() , или exp() и ln() , и т.д.
117
Порочный круг (в логике) – использование в определении самого́ определяемого понятия
241
Напомним, что принцип суперпозиции заключается в том, что цепь
(оператор) обладает свойствами однородности и аддитивности. Однородность означает «безразличие» (инвариантность) поведения цепи к амплитуде
входного сигнала: если входной сигнал умножить на произвольное число, то
выходной сигнал также умножается на это число, не изменяясь по форме.
Аддитивность заключается в том, что реакция цепи на сумму двух (а следовательно, и любого большего числа) входных сигналов равна сумме реакций
на каждый из сигналов в отдельности. Нетрудно видеть, что оба эти условия,
строго говоря, не могут быть выполнены ни в какой реальной цепи: как бы
ни были слабы входные сигналы, можно выбрать настолько большой множитель, или настолько большое количество слагаемых, что произойдет нарушение функционирования цепи вследствие перегрузки по питанию, электрического пробоя, возгорания и т.п. Таким образом, линейной любую цепь можно
считать лишь приближенно, при условии, что значения входного сигнала не
выходят за границы некоторого диапазона.
Далее речь будет идти о цепях, нелинейность которых явно выражена и
используется для получения сигналов с желаемыми свойствами.
К сожалению, невыполнение принципа суперпозиции приводит к тому,
что для нелинейных цепей не существует единого метода анализа, столь же
простого, как спектральный или метод интеграла свёртки. Напомним, что
смысл свёртки (интеграла Дюамеля) заключается в суммировании откликов
на все прошлые значения входного сигнала с весами, определяемыми соответствующими значениями импульсной характеристики линейной стационарной цепи. Для ограниченного класса нелинейных цепей существует
обобщение интеграла Дюамеля в виде ряда Вольтерры118
y (t )
h1(1) x(t 1)d1 h2 (1, 2 ) x(t 1) x(t 2 )d1d 2
118
Ви́то Вольте́рра (1860–1940) – итальянский математик, известен работами в области функционального
анализа и интегро-дифференциальных уравнений
242
h3 (1, 2 , 3 ) x(t 1) x(t 2 ) x(t 3 )d1d 2d 3 ... ,
первым членом которого является интеграл свёртки; функция h(1, 2 ,..., k )
называется ядром Вольтерры k -го порядка, k 1,2,3,... . Практическое применение этого выражения сопряжено с большими трудностями [24].
Более распространён приближённый метод анализа, основанный на
представлении нелинейной инерционной цепи каскадным соединением нелинейной безынерционной цепи и линейной инерционной (обычно стационарной)
цепи, или фильтра. Такое искусственное разделение нелинейности и инерционности сильно упрощает анализ и позволяет решать практические задачи с
приемлемой точностью.
Нелинейная безынерционная цепь полностью описывается зависимостью мгновенного значения выходного сигнала от мгновенного значения
входного сигнала в тот же самый момент времени. Наиболее часто в качестве
нелинейной безынерционной цепи рассматривают нелинейный элемент –
двухполюсник, описываемый вольтамперной характеристикой (ВАХ). В этом
случае под входным и выходным сигналами подразумеваются соответственно напряжение, приложенное к двухполюснику, и ток, протекающий через
его выводы. Нередко используются нелинейные реактивные элементы, описываемые вольт-фарадными119, вольт-кулонными120, ампер-веберными121 и
т.п. характеристиками. Линейные безынерционные элементы имеют характеристики, графики которых представляют собой прямые линии (такова,
например, ВАХ идеального резистора). Вид характеристик нелинейных элементов может быть различным: ВАХ полупроводникового диода имеет монотонно растущий характер, ВАХ туннельного диода содержит три участка
119
Вольт-фарадная характеристика – зависимость емкости от напряжения (для линейного ёмкостного элемента постоянная)
120
Вольт-кулонная характеристика – зависимость запасённого заряда от напряжения (для линейного элемента линейная функция)
121
Ампер-веберная характеристика – зависимость магнитного потока от тока, протекающего через катушку
индуктивности (для линейного элемента линейная функция)
243
монотонности (такие характеристики называют N-образными, рис. 5.3), ВАХ
лампы тлеющего разряда не является однозначной функцией и напоминает
букву S (рис. 5.4).
Рис. 5.3. N-образная характеристика
5.4.
Рис. 5.4. S-образная характеристика
Аппроксимация характеристик нелинейных элементов
К нелинейным элементам, наиболее широко применяемым в технике
генерирования и обработки сигналов, относятся в первую очередь полупроводниковые приборы (диоды, транзисторы, туннельные диоды и т.п.), которые описываются характеристиками (чаще всего вольтамперными), имеющими иногда сложный вид. Часто характеристики представлены в виде таблиц или графиков, что не позволяет использовать их непосредственно для
аналитического определения выходных сигналов или их спектров. Для целей
анализа эти характеристики аппроксимируют122 математическими зависимостями (функциями), которые должны быть достаточно простыми и удобными
в применении и в то же время сохранять существенные черты аппроксимируемых характеристик. Требования к точности аппроксимации определяются
решаемой задачей и во всяком случае не должны быть чрезмерными по сравнению, например, с точностью имеющихся результатов измерения соответствующих величин.
122
От латинского proximo – приближаться, близко подходить
244
Рассмотрим наиболее часто применяемые аппроксимации. Для определённости далее считается, что аппроксимируется вольтамперная характеристика, т.е. зависимость тока от напряжения, хотя все выводы справедливы в
равной мере для любых характеристик нелинейных элементов (например,
вольт-фарадных и вольт-кулонных характеристик нелинейных ёмкостей или
ампер-веберных характеристик нелинейных индуктивностей).
5.4.1. Полиномиальная (степенна́я) аппроксимация
Характеристика нелинейного элемента представляется полиномом некоторой степени N
i f (u )
N
ak u k a0 a1u a2u 2... aN u N .
(5.5)
k 0
Во всех практически важных случаях функция f (u ) аппроксимирует
истинную ВАХ (заданную графически или таблично) не на всей числовой
оси, а только на некотором ограниченном интервале значений независимой
переменной, т.е. на рабочем участке. Ширина рабочего участка обычно
определяется размахом колебаний полезного сигнала относительно рабочей
точки, которая задаётся постоянным напряжением смещения, прибавляемым
к полезному сигналу, рис. 5.5.
Иногда удобно аппроксимирующий полином (5.5) представить в форме
i a '0 a '1 (u U 0 ) a '2 (u U 0 ) 2 ... a ' N (u U 0 ) N ,
(5.6)
где U 0 – постоянное напряжение смещения, определяющее рабочую точку
ВАХ. Коэффициенты в этом выражении, разумеется, отличаются от коэффициентов a0 ,..., a N . Такая форма записи упрощает математические операции
при нахождении спектра тока.
245
Рис. 5.5. Рабоч
чая точкаа и рабочи
ий участо
ок характееристики НЭ
бочем учаастке (N 1) значеений аргум
мента (наапряжени
ия),
Выбереем на раб
обоззначив ихх u1, u2 ,...., u N 1 . Длля каждого из эти
их значени
ний напряяжения об
бозначчим соотвветствующие значчения токка (взятыее из табллицы или найденны
ые
по и
имеющем
муся графику ВАХ
Х), как i1, i2 ,..., iN 1 . Тогда с огласно (5.5)
(
мож
жно
состтавить N 1 уравн
нение
2
N
a0 a1u2 a2u2 ... a N u2 i2
...... ...... ...... ... ... ......
2
N
a0 a1u N 1 a2u N
1... a N u N 1 iN 1
a0 a1u1 a2u12 ... a N u1N i1
(5.77)
с N 1 неизввестными
и a0 , a1,...,, aN . Реш
шив эту си
истему лиинейных алгебраич
а
ческихх уравнен
ний (СЛА
АУ), мож
жно найти
и коэффи
ициенты a 0 , a1, a2 ,...a N поллином
миальной функции
и (5.5). Гррафик это
ой аппроксимирую
ющей фу
ункции прроходи
ит через все точки
и с абсци
иссами u1, u2 ,..., u N 1 и ордиинатами i1, i2 ,..., iN 1 ;
этотт метод ап
ппроксим
мации изв естен какк метод выбранны
в
ых точек.
Иногдаа требуеттся найти
и полином
миальную
ю аппрокссимацию характерристикки для сллучая, коггда количчество иззвестных пар значчений нап
пряженияя и
токаа больше (возможн
но, намноого), чем степень аппроксим
а
мирующеего полин
нома п
плюс еди
иница. В этом
э
случчае систеема (5.7) содержит
с
т уравнен
ний больш
ше,
2
246
чем неизвестных, и в общем случае не имеет решения (является несовместной). Тогда можно применить метод наименьших квадратов, который позволяет найти такую функцию, график которой в наименьшей степени отклоняется от всех точек (в среднеквадратическом смысле), хотя, возможно, не
проходит ни через одну из них.
Метод наименьших квадратов (МНК) основан на использовании видоизмененной системы (5.7). Изменение заключается в том, что каждое i-е
уравнение выполняется не точно, а с некоторой ошибкой («невязкой») i :
a0 a1u2 a2u22 ... a N u2N i2 2
.
...... ...... ...... ...... ......
2
N
... a N uM
iM M
a0 a1uM a2uM
a0 a1u1 a2u12 ... a N u1N i1 1
Найдем такие коэффициенты a0 , a1,..., aN , при которых сумма квадратов всех невязок имеет минимальное значение. Запишем эту сумму квадратов
M
k 1
S a0 a1uk a2uk2 ... a N ukN ik
2
,
и приравняем нулю её частные производные по всем коэффициентам
a0 , a1 ,..., a N , при этом получим:
M
a0 a1uk a2uk2 ... aN ukN ik 0, ,
k 1
M
a0uk a1uk2 a2uk3 ... aN ukN 1 ik uk 0 ,
k 1
M
a0uk2 a1uk3 a2uk4 ... aN ukN 2 ik uk2 0 ,
k 1
……………………………
M
a0ukN a1ukN 1 a2ukN 2 ... aN uk2 N ik ukN 0 .
k 1
247
Таким образом, получилась система N 1 уравнений, линейных относительно величин a0 , a1,..., a N , которая имеет единственное решение123 и тем
самым определяет единственный полином заданной степени, аппроксимирующий зависимость тока от напряжения с наименьшей среднеквадратической
ошибкой относительно имеющихся данных. Заметим, что коэффициенты системы линейных уравнений определяются только известными значениями
токов и напряжений.
Во многих практических задачах целесообразно рассматривать отдельно чётную и нечётную части характеристики. Любую нелинейную характеристику можно, представить в виде суммы чётной и нечётной функций
f (u ) f ч (u ) f н (u ) ,
(5.8)
где чётная и нечётная части удовлетворяют следующим выражениям
f ч (u ) f ч ( u ) ,
(5.9)
f н (u ) f н ( u ) .
(5.10)
Из выражения (5.8) с учётом (5.9) – (5.10) следует
f ( u ) f ч (u ) f н (u ) ,
(5.11)
откуда, складывая и вычитая выражения (5.8) и (5.11), получаем
f ч (u )
f (u ) f (u )
,
2
(5.12)
fн (u )
f (u ) f (u )
.
2
(5.13)
Пример функции F (u ) и ее четной и нечетной частей приведён на рис.
5.6.
123
Конечно, для этого уравнения должны быть линейно независимыми (определитель системы должен быть
ненулевым)
248
Рис. 5.6. Нелинейная функция и ее четная и нечётная части
Очевидно, при полиномиальной аппроксимации ВАХ её четная и нечётная части складываются из чётных и нечётных степеней
f ч (u ) a0 a2u 2 a4u 4 ... ,
f н (u ) a1u a3u 3 a5u 5 ... .
Выделение чётной и нечётной частей ВАХ полезно, когда работа рассматриваемого устройства определяется либо только чётной, либо только нечётной частью. Например, при амплитудной модуляции полезная составляющая колебания определяется только чётной частью ВАХ (см. п. 5.6.2). Тогда аппроксимацию можно проводить только для чётной части, предварительно выделив её графически или по таблице значений, при этом расчет коэффициентов аппроксимации требует решения системы уравнений меньшего
порядка. Кроме того, вид нужной (чётной или нечётной) части ВАХ позволяет оценить «на глаз» пригодность данного НЭ для реализации требуемого
преобразования сигналов.
Важность выделения чётной и нечётной частей ВАХ не ограничивается
только теоретическим рассмотрением, так как существуют схемные решения,
позволяющие получать чётные или нечётные характеристики нелинейных
цепей путем согласного или встречного включения одинаковых нелинейных
элементов. Так строятся, например, балансные, мостовые и кольцевые схемы.
249
а
Б
Рисс. 5.7. Балан
нсные схем
мы
Для рееализации
и четной характеристики необходим
н
мо исполььзовать два
д
НЭ с одинакковыми ВАХ.
В
Пустть ВАХ каждого
к
элемента
э
имеет ви
ид i F (u ) .
ную сумм
марную характери
х
истику мо
ожно полу
учить в ссоответстввии с (5.112)
Четн
в ви
иде
i F (u ) F (u) .
Это озн
начает, чтто необхоодимо сло
ожить ток
ки двух Н
НЭ, на котторые вхоодное напряжен
ние подаеется с проотивопол
ложными знаками (противо
офазно), что
ч
п
ой на рисс. 5.7, а путем
п
сооответствую
ющего поодреаллизуется в схеме, показанно
клю
ючения секкций втор
ричной оббмотки тр
рансформ
матора к ннелинейным элемеентам.. Сложени
ие токов происход
п
дит в общем для ни
их сопроттивлении нагрузки
и.
Реализация нечётной ВА
АХ осущеествляетсся схемойй рис. 5.7
7, б, где сос
проттивление нагрузки
и разделен
но на двее части таак, что вы
ыходное напряжен
н
ние
обраазуется путем
п
выч
читания (п
противоф
фазного сл
ложения)) напряжеений, созд
даваем
мых токам
ми различ
чных НЭ. Таким об
бразом рееализуетсся вычитаание
i F (u ) F (u) ,
что соответсттвует (с точностью
т
ю до коэф
ффициентаа) выражеению (5.1
13).
5.4.2. Эккспоненци
иальная ( показател
льная) ап
ппроксимаация
Критеррием выб
бора аппр
проксимир
рующей функциии являетсся простоота
жения пр и приемл
лемой точ
чности апппроксимаации. Волльаналлитическоого выраж
тамп
перные характери
х
истики н екоторых
х нелиней
йных элеементов с хорош
шей
точн
ностью прредставляяются эксспоненциаальными функциям
ми вида
2
250
i f (u ) Ae u ,
(5.14)
где A и – константы.
Очевидно, при u 0 значение тока равно f (0) Ae0 A . Таким образом, значение константы A определяется непосредственно по заданной ВАХ,
как значение тока при нулевом напряжении. Для нахождения константы
воспользуемся методом приведения к линейному виду. Прологарифмировав
отношение i / A , получим
ln
i
u .
A
(5.15)
По имеющейся заданной (таблицей или графиком) ВАХ можно построить график зависимости левой части выражения (5.15) от напряжения
при различных u . Если экспоненциальная аппроксимация является подходящей для данной ВАХ, полученный график оказывается практически линейным, а константа представляет собой тангенс угла наклона графика (или
хотя бы касательной к нему в рабочей точке).
Для полупроводниковых диодов характерно нулевое значение тока при
нулевом напряжении. Тогда аппроксимация (5.14) неприемлема, и взамен
применяют аппроксимацию вида
i f (u) I0 e u 1 ,
где I 0 f (u ) u – обратный ток диода. Константа находится аналогично вышеописанному случаю.
5.4.3. Кусочно-линейная аппроксимация
Эта аппроксимация заключается в замене реальной характеристики
набором отрезков прямых линий, которые в совокупности приближенно повторяют форму ВАХ. Наибольшее распространение получила аппроксимация
вида
251
u Uн,
0,
i
S (u U н ), u U н ,
(5.16)
где U н – значение напряжения, соответствующее началу линейно растущего
участка, S – крутизна линейной части ВАХ.
5.4.4. Статические и дифференциальные параметры нелинейных
элементов
Кроме функционального описания нелинейного элемента его характеристикой, которое является исчерпывающим, на практике часто используют
числовые величины, которые характеризуют нелинейные элементы более
грубо, но в достаточной для решения практических задач степени. Эти величины (параметры) делятся на статические и динамические (дифференциальные). Для конкретности далее рассматриваются вольтамперная характеристика и её параметры.
Статическая крутизна ВАХ (статическая проводимость) в некоторой
точке представляет собой отношение тока I к напряжению U , рис. 5.8. Очевидно, для линейного элемента статическая проводимость постоянна, для нелинейного элемента она зависит от напряжения. Статическую проводимость
называют также проводимостью по постоянному току. Обратная величина
представляет собой статическое сопротивление (сопротивление постоянному току).
252
Р 5.8. К определени
Рис.
о
ию статичесской и динамическойй крутизны
Диффееренциалььная провводимост
ть или ди
инамическкая крут
тизна – это
э
прои
изводная вольтамп
перной хаарактерисстики в раабочей тоочке S di
d / du , оч
чевидн
но, для неелинейно
ого элемен
нта она зависит отт напряжеения, а дл
ля линейн
ного – совпадаает со стаатической
й крутизн
ной (пров
водимостьью). Обраатная велличина называается динамически
им (дифф
ференциал
льным) соопротивл
лением. ДиД
фференциаальные характери
х
стики им
меют ясны
ый физич
ченамические, или диф
й смысл: это прово
одимость (или соп
противлен
ние) нелиннейного элемента
э
по
ский
отноошению к перемен
нному нап
пряжению
ю бесконеечно малоой амплитуды, котторое прилагаеется к нел
линейном
му элемен
нту в сумм
ме с посттоянным напряжен
н
ниивающим выбор раабочей точ
чки.
ем, ообеспечи
5.5.
Воздей
йствие га
армоничееских кол
лебаний на
н нелин
нейный эл
лемент
5.5.1. Во
оздействи
ие гармон
нического
о напряже
ения на НЭ
Эс
полиномиальной характер истикой
Рассмоотрим НЭ
Э с вольтаамперной
й характер
ристикой,, аппрокссимируем
мой
степ
пенным полиномом
м
i a0 a1 (u U 0 ) a2 (u U 0 ) 2 ... a N (u U 0 ) N ;
(5.117)
при воздейсттвии напр
ряжения
u (t ) U 0 U m co
os(t ) ,
(5.18)
2
253
изменяющегося по гармоническому закону относительно рабочей точки,
определяемой постоянным напряжением U 0 , рис. 5.9.
Рис. 5.9. Воздействие гармонического напряжения на нелинейный элемент
Ток как функцию времени можно найти подстановкой напряжения
(5.18) в ВАХ (5.17). Раскрывая степени и произведения тригонометрических
функций, получим ряд Фурье в тригонометрической форме (см. п. 2.10)
i (t ) I 0 I1 cos(t ) I 2 cos(2t 2 ) ... I N cos( N t N ) ,
с коэффициентами
1
3
I 0 a0 a2U m2 a4U m4 ... ,
2
8
3
3 5
5
I1 a1U m a3U m
a5U m
... ,
4
8
(5.19)
1
1
I 2 a2U m2 a4U m4 ... ,
2
8
254
1
5
3
5
I3 a3U m
a5U m
... и т.д.
4
16
Таким образом, спектр тока, протекающего через НЭ при гармоническом воздействии, содержит кратные гармоники (гармонические составляющие с частотами n при n 0,1,2,..., N ). Поэтому форма тока отличается от
гармонической, т.е. имеют место нелинейные искажения. Степень нелинейных искажений принято характеризовать числовой характеристикой – коэффициентом гармоник124
kг
I 22 I32 I 42 ...
,
I1
(5.20)
где I n – амплитуда n -й гармоники тока.
Если ток протекает через НЭ и частотно-избирательную нагрузку
(фильтр), то напряжение на нагрузке определяется теми составляющими, для
которых нагрузка представляет значительное сопротивление. Например,
включая последовательно с НЭ параллельный колебательный контур,
настроенный на 2-ю (3-ю, 4-ю и т.д.) гармонику, получаем на нагрузке гармоническое напряжение кратной (двойной, тройной, и т.д.) частоты, поскольку остальные гармоники тока не создают на контуре заметного падения
напряжения (при достаточной добротности контура его сопротивление на
этих частотах пренебрежимо мало). Таким образом практически реализуется
умножение частоты на 2 (3, 4 …). Частным случаем умножения частоты
можно считать выпрямление переменного тока (умножение частоты на 0; при
этом нагрузкой служит фильтр нижних частот).
Нередко применяют нелинейный активный элемент (например, транзистор) с нагрузкой в виде параллельного колебательного контура, настроенного на основную гармонику ; таким образом осуществляется нелинейное (резонансное) усиление узкополосных сигналов, спектр которых сосредоточен в
124
Встречающееся название «коэффициент нелинейных искажений» не рекомендовано ГОСТ 16465-70.
255
узкой полосе частот около – в полосе пропускания усилителя. Достоинством таких нелинейных усилителей является их высокий коэффициент полезного действия, под которым понимается отношение мощности полезного
сигнала к полной мощности, получаемой усилителем от источника питания.
Если сигнал на входе резонансного усилителя является узкополосным, то
кратные и комбинацинные составляющие, возникающие при его воздействии
на НЭ, отстоят от его средней частоты достаточно далеко, и частотноизбирательная нагрузка обеспечивает их подавление, а, следовательно, отсутствие нелинейных искажений формы сигнала (однако могут иметь место
линейные искажения, обусловленные неравномерностью АЧХ и нелинейностью ФЧХ усилителя в полосе частот усиливаемого сигнала). Зависимость
I1(U m ) амплитуды первой (полезной) гармоники тока от амплитуды входно-
го гармонического напряжения называется колебательной характеристикой
усилителя125.
При воздействии на резонансный усилитель гармонического напряжения постоянной амплитуды с резонансной нагрузки снимается гармоническое
напряжение той же частоты, т.е. усилитель «ведёт себя» как линейный с крутизной вольтамперной характеристики, равной просто отношению амплитуды полезной гармоники тока к амплитуде U m воздействующего гармонического напряжения. Эта крутизна, называемая средней крутизной, однако, зависит от амплитуды U m в общем случае нелинейным образом. Например,
средняя крутизна по 1-й гармонике для нелинейного элемента, описываемого
полиномом (5.17), определяется из (5.19) как
3
5
Sср1 a1 a3U m2 a5U m4 ... .
4
8
125
Для умножителя частоты на n колебательной характеристикой служит зависимость I n (U m )
256
5.5.2. Воздействие гармонического напряжения на НЭ с
экспоненциальной ВАХ
Ток, протекающий через нелинейный элемент с экспоненциальной
вольтамперной характеристикой i (u ) Ae u при воздействии на него гармонического напряжения u (t ) U 0 U m cos(0 t ) , определяется путём подстановки:
U U cos(0t )
i (u ) Ae 0 m
Ae U 0 e U m cos(0t ) .
Видно, что ток представляет собой периодическую функцию времени с
периодом T 2 / 0 , поэтому его можно представить рядом Фурье. Для
нахождения коэффициентов ряда воспользуемся известным равенством
eb cos x I 0 (b) 2 I k (b) cos(kx) ,
k 1
где I k () – специальная функция, носящая название модифицированной
функции Бесселя k -го порядка. Во избежание путаницы, связанной с использованием буквы I для обозначения амплитуд гармоник тока, в литературе по
радиотехнике и связи модифицированные функции Бесселя обозначают Bk ()
. С учётом этого ток можно записать в виде тригонометрического ряда Фурье
U0
i (t ) Ae
B
(
U
)
2
B
(
U
)
cos(
k
t
k
)
0
k m
m
0
k 1
.
5.5.3. Воздействие гармонического напряжения на НЭ с
кусочно-линейной ВАХ
При кусочно-линейной аппроксимации (5.16) ВАХ нелинейного элемента протекающий через него ток представляется импульсами, описываемыми отрезками гармонической функции, рис. 5.10. Примем для определённости, что приложенное напряжение описывается выражением
u (t ) U 0 U m cos(t ) ,
257
тогда ток протекает через НЭ только в пределах временных интервалов,
определяемых уравнением
U 0 U m cos(t ) U н .
i
Im
i (t )
I
Uн
U0
U
0
t
U (t )
t
Рис. 5.10. К определению угла отсечки
Величину интервала протекания тока принято характеризовать углом
(углом отсечки), определяемым уравнением
U 0 U m cos U н ,
откуда
cos
Uн U0
.
Um
(5.21)
Обозначим максимальное значение тока I max , а буквой I обозначим
амплитудное значение тока, который протекал бы через нелинейный элемент,
если бы его характеристика была линейной и описывалась функцией
i S (u U н ) . Тогда, очевидно,
I max I (1 cos ) ,
(5.22)
258
а ток в пределах угла отсечки
i(t ) I max
cos t cos
.
1 cos
(5.23)
Разлагая его (на интервале от до ), как чётную функцию, в ряд
Фурье
i (t ) I 0 I1 cos t I 2 cos 2t I 3 cos3t ... ,
имеем
1
I0
2
I1
In
1
1
I max
I max
I max
cos t cos
d t I max 0 ( ) ,
1 cos
cos t cos
cos t d t I max1( ) ,
1 cos
cos t cos
cos nt d t I max n ( ) .
1 cos
Коэффициенты пропорциональности, связывающие максимальное значение I max импульса тока с амплитудами гармоник тока, зависят от угла отсечки и называются функциями Берга (коэффициентами Берга)126. Функции
Берга определяются выражениями
0 ( )
sin cos
,
(1 cos )
1( )
sin cos
,
(1 cos )
n ( )
126
2 sin n cos n cos n sin
n(n 2 1)(1 cos )
.
Аксель Иванович Берг (1892-1979) – известный русский ученый в области радиотехники, академик
259
Несколлько перввых функц
ций Бергаа показан
ны на рис . 5.11, а. Видно,
В
чтто,
выб
бирая знач
чение угл
ла отсечки
и (путем соответсттвующегоо заданияя U m и U 0 ),
мож
жно добитться макссимума нуужной гаармоники в спектрре тока. Такой
Т
опттималььный угол отсечки
и для n -й
й гармони
ики опредееляется в ыражением
opt
1120
.
n
(5.244)
а
б
Рисс. 5.11. Функции Бергга
Учитывая (5.22)) и (5.23),, можно записать
з
ток
т в предделах угл
ла отсечки
ив
видее
i (t ) I (cos t cos
c ) SU
U m (cos t cos ) ,
тогд
да амплиттуды гарм
монически
их составвляющих тока
т
I n SU
U m n ( ) ,
где
n ( ) (1 cos ) n ( )
дставляетт собой ко
оэффициеент пропо
орционал
льности м
между I и I n . Фун
нкпред
ции n ( ) , показанны
п
ые на рисс.5.11,б, также
т
носсят назваание функ
кций Бергга.
игает при
и
Макксимума n -я функция дости
opt
1180
.
n
(5.255)
2
260
Выбор формулы для определения оптимального угла отсечки определяется решаемой задачей. Если проектируется мощный усилитель или умножитель частоты, когда задан максимальный ток I max , определяемый требованиями максимально допустимой рассеиваемой мощности или электрической прочности устройства, и изменять угол отсечки можно изменением U 0
и U m , поддерживая заданное значение I max , следует пользоваться формулой
(5.24); если задано амплитудное значение U m входного напряжения, что характерно для маломощных каскадов, и для выбора угла отсечки можно оперировать только смещением U 0 , справедлива формула (5.25).
5.5.4. Бигармоническое воздействие на НЭ
Рассмотрим теперь воздействие на НЭ с вольт-амперной характеристикой, аппроксимируемой полиномом, бигармонического напряжения вида
u (t ) U 0 U m1 cos(1t 1 ) U m 2 cos(2t 2 ) .
Подставляя это выражение в полиномиальную ВАХ и раскрывая степени суммы гармонических функций по формуле бинома Ньютона
( a b) k
k
k
k!
Ckma k mbm , Ckm m m!(k m)! ,
m0
находим, что в спектре тока будут присутствовать составляющие с комбинационными частотами вида
n11 n22 ,
(5.26)
где n1 и n2 – целые числа (положительные, отрицательные или 0), причем
порядок комбинационной частоты n1 n2 ограничивается степенью N полинома, аппроксимирующего характеристику:
n1 n2 N .
261
Появление в спектре тока комбинационных составляющих при воздействии на нелинейный элемент суммы двух гармонических колебаний используется для реализации многих полезных преобразований сигналов, таких как
перенос спектра, модуляция, детектирование. С другой стороны, в нелинейных устройствах может происходить нежелательное образование комбинационных составляющих, приводящее к искажениям полезного сигнала.
Например, нелинейность усилителя звуковой частоты, применяемого в бытовом радиоприемнике, приводит к образованию комбинационных составляющих, лежащих в полосе частот полезного сигнала, и удалить их путем фильтрации невозможно. Это приводит к нелинейному искажению сигнала. Нелинейность канала связи может при прохождении сигнала привести к возникновению комбинационных составляющих, частоты которых принадлежат
другому каналу, создавая таким образом помеху для этого канала.
5.5.5. Использование нелинейного элемента в качестве
параметрического
Реализация линейного параметрического элемента на практике может
быть затруднена. Нередко в качестве параметрических приближённо линейных элементов используются элементы нелинейные, при этом должны выполняться определенные условия.
Предположим для определенности, что на НЭ подается, кроме постоянного напряжения U 0 , необходимого для выбора рабочей точки, сумма двух
гармонических колебаний u (t ) U1 cos 1t U 2 cos 2t , причем одно из них
имеет настолько малую амплитуду (например, U1 ), что изменение напряжения за счет первого слагаемого происходят на узком участке ВАХ, который
можно считать приближенно линейным, а второе колебание большой амплитуды смещает рабочую точку относительно U 0 и изменяет крутизну этого
линейного участка.
262
Таким образом, при воздействии на НЭ сильного и слабого колебаний
элемент ведёт себя по отношению к слабому колебанию (сигналу) как приближённо линейный параметрический элемент, управляемый по крутизне
сильным колебанием.
Пример 5.1. Принцип действия супергетеродинного приёмника осно-
ван на преобразовании частоты, т.е. переносе спектра модулированного колебания из окрестности несущей частоты в окрестность так называемой промежуточной частоты без изменения формы модулирующего сигнала. Модулированный сигнал можно рассматривать, как узкополосный, не конкретизируя вид модуляции (см. разд. 2):
x(t ) A(t )cos 0t (t ) A(t )cos (t ) .
Полагая модулированный сигнал слабым, рассмотрим его воздействие
совместно с сильным опорным гармоническим колебанием на нелинейный
элемент с квадратичной ВАХ. Можно считать, что слабый сигнал изменяется
в малой окрестности рабочей точки, так что по отношению к этому слабому
сигналу ВАХ практически линейна и может быть заменена касательной, а
крутизна этой касательной зависит от положения рабочей точки, определяемого сильным опорным колебанием, и меняется по закону
S (t ) S0 S m cos г t ,
где г – частота гетеродина127 (генератора опорного колебания), Sm – максимальное отклонение крутизны от среднего значения S0 . Ток, протекающий
через нелинейный элемент
i (t ) A(t )cos 0t (t ) S0 Sm cos гt
A(t ) S0 cos 0t (t ) A(t ) Sm cos 0t (t ) cos г t
127
Гетероди́ном называют местный (т.е. входящий в состав приемного устройства) маломощный генератор
гармонического опорного колебания, используемого для переноса спектра (гетеродинирования, преобразования частоты) или синхронного детектирования, которое можно рассматривать как частный случай гетеродинирования
263
A(t ) S0 cos 0t (t )
A(t ) Sm
A(t ) Sm
cos 0 г t (t )
cos 0 г t (t )
2
2
содержит три узкополосных слагаемых, спектральные плотности которых
совпадают с точностью до констант S0 и Sm / 2 и расположены на частотах,
равных, соответственно, 0 , 0 г и 0 г . Выделив одну из двух последних составляющих с помощью полосового фильтра, получаем сигнал,
перенесённый без изменения закона модуляции на промежуточную частоту
пр 0 г (или пр 0 г ). Преимущество супергетеродинного приемника состоит в том, что настройка на нужный частотный канал (выбор желаемой передающей станции) осуществляется путем изменения частоты гетеродина, что значительно проще, чем перестраивать полосовой фильтр –
входную цепь приемника прямого усиления. Основная частотная селекция,
обеспечивающая избирательность по соседнему каналу, осуществляется на
промежуточной частоте полосовым фильтром сосредоточенной селекции,
для которого сравнительно просто обеспечиваются хорошие частотноизбирательные свойства (близкий к 1 коэффициент прямоугольности) благодаря тому, что он не нуждается в перестройке. ◄
Если условие слабости модулированного сигнала нарушено, то преобразовательный элемент следует рассматривать как нелинейный, при этом
комбинационные составляющие второго порядка, сосредоточенные в спектральной области около частот 0 г и 0 г , определяются чётной частью ВАХ. Если чётная часть ВАХ содержит слагаемые 4 степени (или более
высокой чётной), при преобразовании частоты происходит искажение закона
модуляции.
264
5.6.
Ампли
итудная модуляци
м
ия гармоническогго переноосчика
5.6.1. Вр
ременное и спектра
альное оп
писание АМ-колеб
А
баний
Гармон
нические переносччики частто использзуются в радиотех
хнике и сввязи в силу ряд
да причин
н, среди ккоторых главная
г
зааключаюттся в том,, что тольько
гарм
монические колебания не и
изменяютт формы при проххождении
и через лил
нейн
ные стаци
ионарныее цепи и кканалы связи. Амп
плитуднаая модуляяция заключаеттся в измеенении ам
мплитуды
ы гармони
ического несущего
н
о колебани
ия
uн (t ) U m cos(0t )
в сооответстви
ии с измеенениями
и первичн
ного (инф
формациоонного) си
игнала (п
при
этом
м, конечн
но, колебаание переестаёт бытть гармон
ническим)). Для про
остоты ан
нализаа примем
м, что пер
рвичный сигнал представл
п
ляет собо й также гармонич
ческоее колебан
ние низкой (в сравн
нении с несущей
н
частотой
ч
Э
0 ) частооты . Это
случчай так наазываемо
ой тональьной (однотональной) модулляции. То
огда ампллитудн
но-модулированно
ое колебан
ние (АМК
К) имеет вид
в
uАМ (t ) U (t )co
os(0t ) U m 1 M cos(t ) coss(0t ) ,
(5.277)
где M – коээффициен
нт амплит
тудной модуляции
м
и. На рис . 5.13 пок
казано АМ
Мк
иентом моодуляции
и 0,5.
колеебание с коэффици
Рис. 5.13.
5
Амплиитудно-модулированное колебаание
Нетруд
дно получ
чить вырражение для
д опред
деления ккоэффици
иента мод
дуляци
ии по врееменной диаграмм
д
ме. Очеви
идно, огиб
бающая А
АМК досттигает мааксимума при условии
у
cos(t ) 1 и минимума
м
а при cos (t ) 1, поэттому
2
265
umax U m (1 M ) ,
umin U m (1 M ) .
Склладывая и вычитая эти равен
нства, пол
лучаем си
истему
umax umin 2U m
,
umax umin 2U m M
откууда
M
umax
m umin
n.
um
max umin
n
Величи
ина M должна леежать в интервале
и
от 0 до 1. При M 1 имееет
местто искажеение огиб
бающей, н
называемое перемо
одуляциейй, рис. 5.1
14.
Рис. 5.14. Ампл
литудно-моодулирован
нное колеб
бание с перремодуляци
ией
Найдём
м спектр тональноого АМК. Напомни
им, что сппектр – этто совокуупностть коэфф
фициентовв, определляющих амплитуд
ды и начаальные фазы
ф
гарм
монических коолебаний, составлляющих рассматр
риваемоее колебан
ние. Тоггда
йти спекттр» – озн
начает прредставитьь АМК в виде сум
ммы гарм
моническких
«най
колеебаний и определи
ить их ам
мплитуды и началььные фазы
ы. Раскроем выраж
жение (5.27) и получим
п
uАМ (t ) U m cos(0t )
U mM
co
os (0 )t
2
U mM
cos (0 )t .
2
(5.288)
Следоввательно, амплитуддная спекктральнаяя диаграм
мма тонального АМ
МК
имеет вид, пооказанны
ый на рис. 5.15, а, а фазовая – на рис.. 5.15, б. Гармонич
Г
че2
266
ские колебания комбинационных частот 0 и 0 называются соответственно нижней и верхней боковыми составляющими АМК.
Um
UmM / 2
UmM / 2
0
0
0
0
а
0
0
0
0
б
Рис. 5.15. Амплитудная (а) и фазовая (б) спектральные диаграммы
тонального амплитудно-модулированного колебания
Другой формой наглядного представления АМ-колебаний служит векторная диаграмма, показанная на рис. 5.16. Здесь принято, что комплексная
плоскость вращается по часовой стрелке с угловой скоростью 0 , тогда вектор несущего колебания длины U m неподвижен, а векторы боковых колебаний вращаются в противоположных направлениях с одинаковыми угловыми
скоростями и , так что их сумма всегда лежит на линии, вдоль которой
направлен вектор несущего колебания (в нулевой момент времени угол между вектором несущего колебания и вещественной осью комплексной плоскости равен начальной фазе , а векторы боковых составляющих отстоят от
вектора несущего колебания на угол в обе стороны). Таким образом, сумма всех трех векторов со временем изменяет только длину, оставаясь на той
же прямой, т.е. имеет место модуляция (изменение) только амплитуды. Очевидно, то же справедливо и при любом первичном сигнале, который всегда
267
можно представить суммой гармонических колебаний. При этом векторная
диаграмма приобретает сложный вид и обычно не используется.
UmM / 2
UmM / 2
Um
0
0
Re
Рис. 5.16. Векторная диаграмма тонального амплитудно-модулированного колебания
Спектральная диаграмма АМ-сигнала при произвольном модулирующем сигнале может быть найдена с использованием теоремы умножения (см.
п. 2.10.2). Предположим, что первичный сигнал b(t ) имеет спектральную
плотность
B ( ) . При модуляции происходит умножение колебания
1 Mb(t )
на колебание U m cos 0t (для простоты начальную фазу поло-
жим равной 0). Согласно теореме умножения спектральная плотность результата умножения равна свёртке спектральных плотностей сомножителей.
Спектральная плотность первого сомножителя, очевидно, равна
2 ) MB( ) . Спектральная плотность несущего колебания равна (см.
п. 2.9.2)
2 U m
0 ) 0 )
2
U m 0 ) 0 ) .
Поэтому результат модуляции имеет спектральную плотность
U АМ ( ) U m 0 )
U m 0 )
MU m B 0 )
2
MU m B 0 )
.
2
(5.29)
Таким образом, спектральная плотность АМК имеет вид двух масштабированных (в MU m / 2 раз) копий спектральной плотности первичного сиг268
нала, сдвинутых вправо и влево по оси частот на величину несущей частоты.
Несущее колебание представлено в спектральной плотности АМК двумя функциями с весом U m . На рис. 5.17 показаны качественно модули (сплошные линии) и аргументы (штриховые линии) спектральных плотностей вещественного
первичного
сигнала
и
соответствующего
амплитудно-
модулированного колебания.
а
б
Рис. 5.17. Модули спектральных плотностей несущего и модулирующего колебаний (а)
и амплитудно-модулированного колебания (б)
5.6.2. Получение АМ-колебаний
Реализовать амплитудную модуляцию можно при помощи устройства,
структурная схема которого показана на рис. 5.18. Перемножитель можно
понимать по отношению к несущему колебанию U m cos 0t как линейный
усилитель с коэффициентом усиления, изменяющимся по закону 1 Mb(t ) .
Полосовой фильтр ПФ предназначен для подавления ненужных составляющих спектра колебания (при идеальном умножении фильтр не нужен, однако
269
в реальных устройствах умножение сопровождается возникновением лишних
комбинационных составляющих).
1 Mb(t )
ПФ
uAM (t )
U m cos 0t
Рис. 5.18 Структура амплитудного модулятора
Можно осуществить амплитудную модуляцию, подавая на нелинейный
элемент сумму несущего и модулирующего колебаний и выделяя на частотно-зависимой нагрузке (фильтре) полезные составляющие. В схеме на рис.
5.19 нелинейным элементом является диод, а полосовым фильтром – параллельный контур.
u (t )
uАМ (t )
Рис. 5.19. Схема модулятора на диоде
Пусть ВАХ нелинейного элемента имеет квадратичный вид
i a0 a1u a2u 2 ,
(5.30)
а сумма напряжений
u (t ) U m1 cos 0t U m 2 cos t .
(5.31)
Подставим (5.31) в (5.30) и после преобразований получим (пренебрегая всеми составляющими, лежащими вне полосы пропускания контура)
270
iAM (t ) a1U m1 cos 0t a2U m1U m 2 cos(0 )t
a2U m1U m 2 cos(0 )t
a1U m1 1 M cos t cos 0t ,
где M 2
a2
U m 2 . Видно, что, во-первых, глубина модуляции тока пропорa1
циональна амплитуде первичного сигнала, так что модуляция на квадратичном элементе является линейной128. Во-вторых, модуляция тем глубже, чем
больше отношение a2 / a1 коэффициентов аппроксимации ВАХ. Для выбора
рабочей точки ВАХ используется постоянное напряжение смещения, прибавляемое к входному напряжению. Заметим, что параллельный контур оказывает максимальное сопротивление току на резонансной частоте, а при отклонении частоты от резонансной сопротивление убывает тем быстрее, чем
выше добротность контура. Поэтому коэффициент модуляции напряжения на
контуре всегда будет меньше коэффициента модуляции тока. Этот эффект
называют «частичной демодуляцией129» АМ-колебания резонансной нагрузкой.
При любом законе амплитудной модуляции вектор несущего колебания не меняется (по модулю) во времени и поэтому не может нести информацию. Мощность несущего колебания равна U m2 / 2 , в то время как суммарная мощность боковых составляющих при тональной модуляции равна
M 2U m2 M 2U m2
и при M 1 составляет лишь половину мощности несуще2
42
4
го колебания. Таким образом, 2/3 мощности передатчика затрачивается впу-
128
Имеется в виду линейная зависимость огибающей от первичного сигнала; операция АМ является, конечно, нелинейной
129
Конечно, здесь слово демодуляция используется не в привычном смысле, а как обозначение явления
уменьшения глубины модуляции.
271
стую130. Поэтому на практике часто применяют частичное или полное подавление несущего колебания в передатчике (во втором случае амплитудная модуляция называется балансной, поскольку реализуется в балансных схемах).
Сущность балансной модуляции легко понять, если подойти к построению схемы модулятора с точки зрения обеспечения чётности ВАХ. В самом
деле, частоты боковых составляющих АМ-колебания являются комбинационными частотами (5.26) второго порядка, т.е. n1 n2 1 , а частота несущего
колебания представляет собой комбинационную частоту первого порядка (
n1 1 , n2 0 ). Поэтому если ВАХ нелинейного элемента имеет четный ха-
рактер, в спектре тока будут отсутствовать все нечётные комбинационные
частоты, включая несущую. Схема, показанная на рис. 5.20,а, реализует чётную характеристику и применяется для балансной модуляции (в качестве
нагрузки используется параллельный колебательный контур, представленный на схеме комплексным сопротивлением Zн).
а
б
Рис. 5.20. Балансные модуляторы
Применяется и другая разновидность балансной схемы модулятора,
показанная нарис. 5.20,б. Например, если нелинейные элементы имеют кубическую ВАХ, то появляются нежелательные комбинационные составляющие,
самые вредные из которых имеют частоты 0 2 , так как их трудно подавить (они слишком близки к несущей частоте). Решение заключается в том,
чтобы сделать схему модулятора нечётной по отношению к модулирующему
130
В случае амплитудной модуляции гармонического несущего колебания реальным речевым сигналом доля
полезной мощности составляет всего около 0.1% полной мощности АМК [23]
272
колеебанию, тогда
т
сосставляющ
щие часто
от 0 2 на выхходе не появляютс
п
ся.
При
и этом отн
носительн
но несущ
щей частотты схема являетсяя чётной, вследстввие
чегоо на выхооде отсутсствует и н
несущее колебание
к
е.
Баланссно-модул
лированноое колебаание имееет вид (ппри тонал
льной мод
дуляци
ии)
uБМ (t ) U m cos t cos 0t ;
его график показан наа рис. 5.222.
Рис. 5.22. Балаансно-моду
улированно
ое колебаниие
ществу, БМ-колеб
Б
бание при
и тональн
ной модууляции пр
редставляяет
По сущ
собоой суммуу двух боковых
б
ссоставляю
ющих – гармоничческих ко
олебаний
й с
близзкими часстотами, поэтому
п
гграфик им
меет вид биений.
Учитывая симм
метрию спектра веществеенного ппервичногго сигналла,
вслеедствие которой
к
спектр
с
А
АМ-сигнал
ла также оказывае
ается сим
мметричны
ым
отноосительноо несущеей частоты
ы, можно
о сузить вдвое треебуемую полосу чач
стотт канала, если сфо
ормироватть АМ-си
игнал, имееющий оддну боковвую полоосу
(ОБ
БП-сигнал). Это во
озможно при испо
ользовани
ии сигналла, сопряж
женного по
Гильберту.
й первиччному сиггналу b(t ) ,
Аналиттический сигнал, соответсствующий
юю спекттральную плотноссть
имеет вид b(t ) b(t ) jbˆ(t ) и правоссторонню
2 B( ) . Сдви
иг спектраальной пллотности вправо по
п оси чаастот на 0 достиггаетсяя умножением сиггнала на e j0t . При этом по
олучаетсяя комплек
ксное коллебани
ие, вещественная часть ккоторого представ
вляет соббой дейсттвительны
ый
сигн
нал с одноой (верхн
ней) боковвой полоссой
2
273
uОБПверх (t ) Re b(t )e j0t b(t )cos 0t bˆ(t )sin 0t .
Колебание b '(t ) b(t ) jbˆ(t ) имеет спектральную плотность, сосредоточенную на отрицательных частотах, поэтому умножение его на e j0t формирует комплексное колебание с одной боковой (нижней) полосой
uОБПнижн (t ) Re b '(t )e j0t b(t )cos 0t bˆ(t )sin 0t .
Другой способ реализации однополосной модуляции заключается в
формировании обычного АМ-сигнала и подавлении «лишней» боковой полосы с помощью полосового фильтра; при этом частично подавляется и несущее колебание.
5.6.3. Детектирование АМ-колебаний
Детектирование, или демодуляция, представляет собой процесс, обратный модуляции. Результатом детектирования, следовательно, должен быть
первичный (модулирующий) сигнал. В случае АМ это означает, что при детектировании должен получиться сигнал, повторяющий по форме огибающую АМ-колебания. Известны методы детектирования АМ-колебаний на основе нелинейных и параметрических устройств.
Детектирование АМК параметрической цепью имеет много общего с
модуляцией. В самом деле, амплитудная модуляция представляет собой фактически перенос спектра первичного сигнала на несущую частоту без изменения его формы (см. рис. 5.17). Демодуляции соответствует, очевидно, обратный перенос спектра на такую же величину. Поэтому умножение АМколебания на опорное гармоническое колебание несущей частоты с последующей фильтрацией нижних частот позволяет получить первичный сигнал,
т.е. выполнить детектирование, при помощи параметрического устройства,
показанного на рис. 5.23.
274
uAM (t )
u д (t )
ФНЧ
cos(0t )
Рис. 5.23. Структура синхронного детектора
Умножив АМ-сигнал (5.27) на опорное колебание, получим
uАМ (t ) cos(0t ) U (t )cos(0t )cos(0t )
U (t )
U (t )
cos(20t )
cos( ) .
2
2
Первое слагаемое не представляет интереса и должно быть подавлено
фильтром нижних частот. Второе слагаемое пропорционально огибающей
АМ-сигнала U (t ) U m [1 Mb(t )] , следовательно, оно и представляет собой
результат детектирования. При этом полезный эффект будет максимальным,
если опорное колебание будет иметь не только ту же частоту, что и несущее
колебание АМ-сигнала, но и ту же начальную фазу, то есть для наилучшего
детектирования должно выполняться условие 0 . Поэтому такое детектирование называется синхронным или когерентным. Напомним, что синхронный детектор фактически выделяет синфазную компоненту узкополосного сигнала.
Другой способ детектирования АМ-сигналов основан на использовании нелинейного элемента с последующей фильтрацией нижних частот.
Пусть ВАХ нелинейного элемента аппроксимируется полиномом второго
порядка
i a0 a1u a2u 2 .
Ток, протекающий через НЭ при воздействии на него тонального АМсигнала, равен
275
i (t ) a0 a1U m 1 M cos t cos 0t a2U m2 1 M cos t cos 2 0t
2
a0 a1U m 1 M cos t cos 0t
a2U m2 1 2M
a0
1 1
M2 M2
cos t
cos 2t cos 20t
2
2
2 2
a2U m2 a2U m2 M 2
a U2M 2
a2U m2 M cos t 2 m
cos 2t ВЧ ,
2
4
4
где буквами ВЧ для краткости обозначена сумма высокочастотных составляющих, подавляемых фильтром нижних частот. Из полученного выражения
видно, что помимо постоянной составляющей и полезного сигнала (в данном
случае это колебание с частотой ), а также высокочастотных составляющих, в спектре тока содержится также колебание с частотой 2 , которое и
является наиболее вредным, так как его трудно подавить фильтром нижних
частот131 (частота 2 находится слишком близко к частоте полезного колебания ). Если модулирующий сигнал отличается от гармонического тонального колебания (а на практике это всегда так) и имеет спектр конечной
ширины, то полезные и вредные составляющие разделить практически невозможно132. Таким образом, квадратичное детектирование сопровождается
нелинейными искажениями. Напомним, что нелинейные искажения характеризуются коэффициентом гармоник
kг
I 22 I32 I 42 ...
,
I1
где I n – амплитуда n -й гармоники тока. В данном случае kг
I2 M
, что
I1 4
при максимальной глубине модуляции составляет 25%. Такой уровень нели-
131
Здесь под трудностью подавления вредных составляющих подразумевается то, что для достижения нужной степени подавления может потребоваться очень сложный (многозвенный) фильтр.
132
Например, для полосы частот телефонного канала 300…3400 Гц вторая гармоника нижней частоты равна
600 Гц и не может быть отделена от полезной составляющей сигнала с такой же частотой.
276
нейных искажений в большинстве практических приложений (в частности, в
радиовещании) совершенно недопустим.
Реальные характеристики полупроводниковых приборов могут быть
аппроксимированы квадратичным полиномом лишь в пределах небольшого
участка (при малом сигнале). При сильном сигнале более подходящей может
оказаться кусочно-линейная аппроксимация (см. п. 0). Рассмотрим детектор
на биполярном транзисторе, упрощённая принципиальная схема которого
показана на рис. 5.24.
Eп
R
C
uд (t )
uAM ( t )
U0
.
Eп
Рис. 5.24. Детектор на биполярном транзисторе
Полагая, что зависимость тока коллектора от напряжения база – эмиттер аппроксимируется кусочно-линейной функцией
при u U н ,
0
iк (u )
S (u U н ) при u U н ,
и что напряжение смещения U 0 равно напряжению U н начала линейного
участка характеристики, видим, что угол отсечки согласно (5.21) равен 90,
тогда при воздействии на вход схемы напряжения АМ-сигнала (5.27) ток
коллектора имеет вид импульсов гармонической формы с частотой следования 0 , скважностью 2 и амплитудой
I m SU m 1 M cos t ,
меняющейся медленно по закону модулирующего сигнала.
277
Постоянная составляющая133 импульсного тока также медленно меняется и равна
I 0 (t ) 0 ( ) SU m 1 M cos t 0.318SU m 1 M cos t .
Таким образом, медленно меняющаяся составляющая выходного
напряжения транзисторного детектора равна
uн (t ) 0.318SU m R 1 M cos t .
(5.32)
Качество амплитудного детектора описывается его детекторной характеристикой – зависимостью приращения постоянного напряжения на
выходе от приращения амплитуды высокочастотного гармонического напряжения на входе. Из выражения (5.32) видно, что в отсутствие модуляции (при
M 0 ) напряжение на выходе детектора
uн 0.318SU m R
прямо пропорционально амплитуде входного напряжения. Это означает линейность детекторной характеристики. Коэффициент пропорциональности
kд 0.318SR называют коэффициентом детектирования. Отметим, что если
U 0 U н , угол отсечки будет зависеть от времени, детекторная характеристи-
ка станет нелинейной, что приведёт к нелинейным искажениям выходного
сигнала. Следует иметь в виду, что рассмотренный детектор имеет линейную
детекторную характеристику лишь с точностью до кусочно-линейной аппроксимации характеристики транзистора.
Наиболее простое устройство для детектирования АМ-колебаний – диодный детектор (рис. 5.25).
u AM ( t )
R
C
uд (t )
.
133
На самом деле это не постоянная, а низкочастотная составляющая сигнала, но для каждого отдельного
импульса тока она находится, как постоянная составляющая тока на протяжении одного периода
278
Рис. 5.25. Диод
дный детекттор
В этом
м устройсттве в отли
ичие от тр
ранзистор
рного деттектора уггол отсеч
чки
опрееделяетсяя не внеш
шним истоочником напряжен
н
ния смещеения U 0 , а напряж
жением
м на конд
денсаторее, прилож
женным к диоду в обратном
м направл
лении. В сас
мом
м деле, тоок, протеекающий через ди
иод в пряямом напправлении
и, заряжаает
конд
денсатор до некоторого нап
пряженияя, полярно
ость котоорого тако
ова, что оно
о
стреемится «ззапереть»
» диод. В результаате откры
ытое или запертоее состоян
ние
диод
да в каж
ждый мом
мент вреемени опр
ределяетсся разносстью u (t ) входноого
напрряжения uAM (t ) и выходноого напряяжения uд (t ) ; на гр
графике рис.
р
5.26 эта
э
разн
ность покказана спл
лошной ллинией. Параметр
П
аппроксиимации U н , опред
деляю
ющий начало линей
йно растуущего уч
частка ВА
АХ, приняят здесь равным
р
н
нулю. Медленн
но меняю
ющееся вы
ыходное напряжен
н
ние показзано пунк
ктирной лил
й.
нией
Рис. 5.26. Диагграммы наппряжений и тока в схееме диодноого детекто
ора
Соглассно форму
уле (5.21))
cos
U н U 0 U 0
,
Um
Um
но U 0 I 0 R – это наапряжениее на нагру
узке детектора, отккуда
2
279
cos
I0R
.
Um
(5.33)
Учитывая это и выражая I 0 через функцию Берга 0 ( ) , запишем
I 0 R SU m 0 ( ) R U m cos .
Раскрывая функцию 0 ( ) и сокращая U m , получим
SR
sin cos cos ;
откуда, поделив обе части уравнения на cos , имеем уравнение
SR
tg 1 .
(5.34)
Заметим, что в это уравнение не входит U m . Это означает, что в линейном детекторе угол отсечки есть величина постоянная, зависящая только
от параметров схемы. Используем разложение тангенса в степенной ряд,
ограниченное двумя слагаемыми
1
tg 3 .
3
Тогда из выражения (5.34) получается уравнение
3
SR 3
1 , откуда
3
3
.
SR
Полезная составляющая тока нагрузки, как следует из формулы (5.33),
I0
Um
cos ,
R
пропорциональна U m , что означает линейность детекторной характеристики134. Коэффициент детектирования равен
kд cos cos
3 3 SR .
134
только при сильном сигнале, когда ВАХ диода удовлетворительно аппроксимируется кусочно линейной
функцией
280
Практическое применение диодного детектора предполагает правильный выбор параметров RC -фильтра нижних частот. Необходимо, во-первых,
чтобы сопротивление нагрузки было много больше внутреннего сопротивления диода (в прямом направлении). Это обеспечивает при быстром заряде
конденсатора сравнительно медленный его разряд, тогда напряжение на конденсаторе практически повторяет форму огибающей импульсов тока. Вовторых, емкость конденсатора должна выбираться из того условия, чтобы
граничная частота ФНЧ была больше верхней частоты полезного сигнала и в
то же время меньше несущей частоты. Поскольку используемый ФНЧ первого порядка имеет очень пологую АЧХ, то постоянная времени RC -цепи
должна удовлетворять двойному неравенству
1
0
RC
1
.
Нарушение левой части неравенства приводит к слишком быстрому
разряду конденсатора (напряжение на нагрузке пульсирует с частотой 0 ),
нарушение правой части – к слишком медленному разряду, вследствие чего
напряжение на нагрузке может «не успевать» за более быстрыми изменениями огибающей АМ-сигнала. При этом форма выделяемой огибающей сильно
отличается от модулирующего сигнала, что соответствует нелинейным искажениям.
Следует отметить, что детектирование сигналов с балансной и однополосной амплитудной модуляцией имеет особенности. Напомним, что в спектре БАМ-сигнала отсутствует несущее колебание. За преимущество балансной амплитудной модуляции перед обычной АМ (повышение энергетической
эффективности передатчика) приходится платить усложнением приёмного
устройства, в котором должно быть восстановлено несущее колебание перед
детектированием модулированного сигнала обычным АМ-детектором. При
этом необходимо обеспечить не только равенство частот несущего и восстановленного колебаний, но также и равенство их начальных фаз – синфаз281
ность (это легко понять, если представить себе с помощью векторной диаграммы АМ-сигнала, к каким последствиям приведёт изменение углового
положения вектора несущего колебания при сохранении начальных фаз боковых колебаний). Восстановить несущее колебание можно, например, путем
подачи БАМ-сигнала на нелинейный элемент с квадратичной характеристикой. При этом образуются комбинационные частоты 2 порядка, в случае тональной модуляции это (0 ) (0 ) 20 и (0 ) (0 ) 2 .
При помощи полосового фильтра можно выделить колебание частоты 20 ,
которое подаётся на делитель частоты с коэффициентом деления 2. Полученное колебание имеет частоту 0 и начальную фазу, совпадающую с начальной фазой несущего колебания или отличающуюся от неё на 180 градусов135;
оно используется для синхронизации местного генератора колебания частоты
0 . БМ-колебание можно продетектировать и с помощью синхронного детектора, но при этом также необходима синфазность опорного колебания и
подавленного несущего колебания.
При однополосной амплитудной модуляции с полностью подавленной
несущей теряется «точка отсчёта» на частотной оси, и первичный сигнал не
может быть восстановлен однозначно. Поэтому либо применяют частичное
подавление несущей, либо передают специальное гармоническое колебание
(пилот-сигнал), отстоящее по частоте от несущего колебания на заданную
величину. В обоих случаях достигается существенная экономия мощности по
сравнению с обычной амплитудной модуляцией, главное же преимущество
ОБП-модуляции – уменьшение вдвое требуемой полосы пропускания канала.
Детектирование ОБП-сигнала можно выполнить с помощью синхронного детектора; для этого колебание гетеродина должно иметь те же частоту и
начальную фазу, что и несущее колебание.
135
Если получится колебание с начальной фазой, отличающейся на180º, то результат детектирования изменит полярность (знак), но для многих приложений (например, для телефонной связи) это несущественно.
282
5.7.
Угловая модуляция
5.7.1. Временное и спектральное описание УМ-колебаний
При угловой модуляции гармонического колебания модулированный
сигнал имеет постоянную амплитуду, а его полная фаза зависит от первичного (информационного) сигнала, поэтому УМ-колебание можно записать в
общем виде, как
uУМ (t ) U m cos (t ) U m cos 0t (t ) ,
(5.35)
где (t ) – полная фаза колебания, а (t ) – его начальная фаза.
Для описания УМ-колебаний полезно ввести понятие мгновенной частоты, как производной фазы
(t )
d (t )
d (t )
0
.
dt
dt
(5.36)
При неизменной начальной фазе (в отсутствие модуляции) мгновенная частота равна частоте несущего колебания; изменение начальной фазы под
действием модулирующего сигнала изменяет и мгновенную частоту. Верно и
обратное: изменение мгновенной частоты в соответствии с первичным сигналом приводит к изменению начальной фазы.
Фазовая модуляция заключается в изменении начальной фазы модулированного сигнала пропорционально первичному сигналу
uФМ (t ) U m cos 0t kb(t ) 0 ,
(5.37)
при частотной модуляции пропорционально первичному сигналу изменяется
отклонение мгновенной частоты от среднего значения (несущей частоты),
поэтому ЧМ-сигнал описывается выражением136
t
uЧМ (t ) U m cos 0t k b(t )dt 0 .
t0
136
(5.38)
Нижний предел интеграла задаётся произвольно выбранным началом отсчёта времени
283
В этих выражениях k – коэффициент, называемый крутизной модуляционной
характеристики (которая предполагается линейной), 0 – некоторое несущественное постоянное значение начальной фазы.
При фазовой модуляции (ФМ) начальная фаза меняется по закону первичного сигнала, следовательно, мгновенная частота меняется по закону его
производной. При частотной модуляции (ЧМ) в соответствии с первичным
сигналом меняется мгновенная частота, значит, начальная фаза меняется, как
интеграл первичного сигнала. В любом случае при угловой модуляции аналоговым первичным сигналом по виду модулированного сигнала невозможно
определить вид модуляции (ЧМ или ФМ), если не известен закон модуляции.
Пусть мгновенная частота изменяется по гармоническому закону
(t ) 0 д cos t
(5.39)
(максимальное отклонение мгновенной частоты от среднего значения называется девиацией137 частоты д ). Тогда полная фаза модулированного колебания
t
(t ) (t )dt 0 0 t
0
д
sin t 0
(5.40)
состоит из линейно растущего слагаемого 0t , постоянной 0 и гармонического слагаемого, максимальное значение которого д /
называется ин-
дексом частотной модуляции.
При фазовой модуляции максимальное отклонение начальной фазы от
среднего значения называется девиацией фазы. Если начальная фаза изменяется по гармоническому закону, то есть
(t ) 0 m cos t ,
то девиация фазы m называется индексом фазовой модуляции, а мгновенная
частота
137
От англ. deviation – отклонение
284
(t )
d (t )
d (t )
0
0 m sin t .
dt
dt
На рис. 5.27 показана векторная диаграмма УМ-колебания. Вектор,
изображающий колебание, с течением времени не изменяет своей длины, а
лишь изменяет свое положение между двумя штриховыми линиями, отстоящими от среднего положения на величину девиации фазы, при этом конец
вектора перемещается по окружности138.
Um
(t )
0
0
Re
Рис. 5.27. Векторная диаграмма колебания с угловой модуляцией
Несущее колебание является гармоническим, поэтому его спектр содержит единственную составляющую частоты 0 . В результате модуляции
колебание становится негармоническим, поэтому его спектр обогащается новыми составляющими. Найдём спектр колебания с угловой модуляцией по
гармоническому (синусоидальному) закону. Положим для простоты 0 0 ,
тогда
uУМ (t ) U m cos 0t m sin t
U m cos m sin t cos 0t U m sin m sin t sin 0t .
(5.41)
(здесь использована формула cos( ) cos cos sin sin ).
138
Как и раньше, векторная диаграмма изображена в соответствии с соглашением, что комплексная плоскость вращается по часовой стрелке с угловой скоростью 0
285
Заметим, что согласно выражению (5.41), закон модуляции подвергается нелинейным преобразованиям cos() и sin() , что должно приводить к обогащению спектра, то есть появлению составляющих с комбинационными частотами.
Вначале рассмотрим частный случай малого индекса модуляции m 1 .
Тогда
cos m sin t 1 ;
(5.42)
sin m sin t m sin t .
(5.43)
С учетом этих приближённых равенств перепишем (5.41) в виде
uУМ (t ) U m cos 0t U m m sin t sin 0t
U m cos 0t
U mm
U m
cos 0 t m cos 0 t .
2
2
Полученное выражение похоже на выражение (5.28) для АМколебания. Однако отличие в знаке последнего слагаемого приводит к тому,
что суммарный вектор колебания с течением времени изменяет свое угловое
положение (см. рис. 5.28), что и означает угловую модуляцию. При этом
видно, что конец вектора суммарного колебания движется не по окружности,
а по прямой – касательной к этой окружности. Это отличие от идеального
УМ-колебания является следствием использования приближенных выражений (5.42) – (5.43). Если m 1 , то касательная мало отличается от окружности (тем меньше, чем меньше m ).
Рассмотренный случай малого индекса модуляции представляет лишь
иллюстративный интерес, т.к. на практике обычно используются УМколебания с большим индексом. Чтобы найти спектр УМ-колебания при
произвольном индексе, запишем его в виде
uУМ (t ) U m cos 0t m sin t
286
U m Re e j0t e jm sin t .
Известна формула139
e jm sin x
k
J k (m)e jkx ,
где J k () – функция Бесселя первого рода k -го порядка. С учетом этого равенства можно записать выражение ряда Фурье для УМ-колебания:
Umm / 2
Umm / 2
Um
0
0
Re
Рис. 5.28. Векторная диаграмма колебания при тональной УМ с малым индексом
j t
uУМ (t ) U m Re e 0 J k (m)e jk t
k
Um
k
J k (m)cos 0 k t .
Таким образом, даже при тональной модуляции спектр УМ-колебания
имеет бесконечно много боковых составляющих, амплитуды которых определяются значениями функций Бесселя J k ( m) в зависимости от номера боковой составляющей k при фиксированном значении m . Эти значения быстро убывают с ростом k при k m (см. рис. 5.29, где показана зависимость
J k ( m) при m 40 ). Благодаря такому свойству функций Бесселя можно счи-
тать, что УМ-колебание имеет спектр с эффективной шириной, равной
2(m 1) 2m 2д
139
(5.44)
jm sin x
Фактически это разложение периодической функции e
в комплексный ряд Фурье
287
(еди
иница доб
бавлена для
д того, ччтобы фо
ормула бы
ыла справведлива и при малоом
индексе m 1 ).
Рис. 5.29. Значеения функцций Бессел
ля при разли
ичных k и при m 40
4
Итак, можно
м
в первом
п
прриближен
нии считаать, что ш
ширина сп
пектра УМ
Мнала равн
на ширине диапазоона измен
нения мгн
новеннойй частоты, котораяя, в
сигн
свою
ю очередь, равна удвоенноой девиац
ции часто
оты. Напоомним, чтто рассмаатриваалась мод
дуляция по
п гармон
ническому закону. При моддуляции более
б
слоожным
ми сигналлами точн
ный вид спектра найти тр
рудно, ноо, как праавило, и не
нуж
жно. Эффеективная ширина спектра УМ-колеб
У
бания прии произвольном мом
дули
ирующем
м
сигнал
ле
мож
жет
бытть
приб
ближённо
опредеелена
к
как
2 д max , где max
высшая частота в спектре
с
м
модулиру
ующего си
игm – наив
налаа [9].
5.7.2. Пр
риближённый анал
лиз возде
ействия УМ-колебааний на ЛИ
ИС-цепи
Сигналлы с угло
овой моддуляцией применяются в ттехнике связи
с
очеень
ширроко. При
и этом чассто предсставляет большой
б
практичееский инттерес задаача
аналлиза колеебаний наа выходе Л
ЛИС-цеп
пи (фильтр
ра, линеййного стац
ционарноого
канаала связи
и) при возздействии
и УМ-кол
лебания. При негаармоническом мод
дулируующем си
игнале и большом
м индексее модуляц
ции точны
ый анализз методам
ми,
упом
мянутыми
и в разд. 4, практи
ически невозможен
н. Для прииближённ
ного аналлиза
прохожд
дения
си
игналов
с
овой
угло
модуляциейй
через
частотн
но-
ирательны
ые цепи применяет
п
тся метод мгновен
нной част
тоты.
изби
При уггловой мо
одуляции
и несущегго колебаания с чаастотой 0 2 f 0 и
амплитудой U m низко
очастотны
ым колеб
банием (первичным
м сигнало
ом) b(t ) поп
2
288
лучается сигнал, который можно приближённо рассматривать как «гармоническое колебание с медленно меняющейся частотой»140. Под частотой здесь
понимается мгновенная частота УМ-колебания, а ее изменения могут считаться медленными, если мгновенные частоты УМ-колебания и отклика на
него частотно-избирательной цепи практически совпадают. Для этого требуется, чтобы скорость протекания переходных процессов в ЧИЦ была велика в
сравнении со скоростью изменения модулирующего сигнала. Отсюда вытекает требование, чтобы верхняя частота спектра модулирующего сигнала
была намного меньше ширины полосы пропускания цепи . Однако скорость изменения мгновенной частоты УМ-сигнала зависит также от
амплитуды модулирующего сигнала, которая определяет девиацию частоты
д – максимальное отклонение мгновенной частоты от среднего значения,
см. (5.39). Принято считать [9], что для применения метода мгновенной частоты достаточно, чтобы выполнялось условие д .
Метод мгновенной частоты основан на замене колебания с угловой модуляцией гармоническим колебанием, прохождение которого через ЛИСцепь сопровождается умножением на значение КЧХ на частоте, равной мгновенной частоте УМ-колебания.
Перепишем (5.35) в виде
j t (t )
uУМ (t ) U m cos (t ) U m Re e j (t ) U m Re e 0
.
Тогда колебание на выходе ЛИС-цепи с комплексной частотной характеристикой H ( ) K ( )e j ( ) можно записать как
uвых (t ) U m K ( (t )) Re e
j 0t (t ) (t )
U m K ( (t ))cos 0t (t ) (t ) ,
140
Разумеется, в строгом смысле это словосочетание внутренне противоречиво, как, например, «слегка изогнутая прямая»; такое колебание не является гармоническим и имеет сложный спектр, см. п. 5.7.1
289
откуда видно, что выходной сигнал имеет переменную амплитуду U m K ( (t ))
, меняющуюся по закону, зависящему от изменений мгновенной частоты
входного сигнала
(происходит
паразитная амплитудная модуляция).
Начальная фаза выходного сигнала также отличается от начальной фазы
входного сигнала; их разность (t ) определяется в каждый момент времени мгновенной частотой входного сигнала (t ) и фазочастотной характеристикой цепи () . Таким образом, ЛИС-цепь вносит искажения и в закон
угловой модуляции сигнала. Мгновенная частота выходного сигнала отличается от мгновенной частоты входного сигнала (5.36) и равна
вых (t ) 0
d (t ) d (t )
.
dt
dt
5.7.3. Получение колебаний с угловой модуляцией
Для точного осуществления фазовой модуляции следовало бы применить электрически управляемую фазосдвигающую цепь (фазовращатель) с
идеально линейной зависимостью вносимого фазового сдвига от приложенного напряжения. Тогда, подавая на фазовращатель в качестве входного сигнала гармоническое несущее колебание, а в качестве управляющего напряжения – первичный сигнал, на выходе мы получили бы ФМ-сигнал. На практике этот идеальный способ может быть реализован лишь приближённо.
Роль электрически управляемого фазовращателя исполняет резонансный усилитель (усилитель с параллельным колебательным контуром в качестве нагрузки). В колебательный контур кроме основной постоянной ёмкости
включают электрически управляемую ёмкость, в качестве которой используют барьерную ёмкость полупроводникового прибора – варикапа. Варикап
представляет собой полупроводниковый диод, включённый в обратном
направлении. При этом запертый p n -переход диода функционирует, как
управляемый конденсатор, емкость которого зависит от приложенного
напряжения.
290
На вход усилителя подаётся гармоническое (несущее) колебание. Изменение напряжения на варикапе изменяет резонансную частоту контура, и,
следовательно, приводит к его меняющейся расстройке относительно частоты колебания (что, очевидно, равносильно прохождению через резонансную
цепь с неизменной настройкой «гармонического колебания с медленно меняющейся частотой»). Поэтому в соответствии с изменениями первичного сигнала будут изменяться амплитуда и начальная фаза напряжения на выходе
усилителя. Вид этих изменений можно приближенно рассчитать по методу
мгновенной частоты. Таким образом, колебание превращается из гармонического в модулированное по амплитуде и по фазе. Нежелательную («паразитную») амплитудную модуляцию можно устранить при помощи усилителяограничителя. Качество фазовой модуляции (линейность модуляционной характеристики) будет тем выше, чем ближе ФЧХ резонансного усилителя к
линейной в диапазоне изменения частоты настройки контура при воздействии первичного сигнала на варикап. Допущение о линейности ФЧХ справедливо при небольших индексах модуляции (20…30 или около 0.5 рад).
Фазовая модуляция методом фазирования несущей реализуется в модуляторе Армстронга141, рис. 5.30, и заключается в суммировании балансномодулированного АМ-колебания и несущего колебания, повёрнутого по фазе
на 90, что соответствует рис. 5.28.
b(t )
+
U m sin 0t
U m cos 0t
uвых (t )
Рис. 5.30. Структура модулятора Армстронга
141
Эдвин Армстронг (1890–1954) – известный американский инженер, автор идеи частотной модуляции и
супергетеродинного приемника [23]
291
В самом деле, на выходе перемножителя, рис. 5.30, имеет место напряжение БМ-сигнала, который превратился бы в обычный АМ-сигнал, если бы
на сумматор подавалось то же несущее колебание, что и на перемножитель.
Поскольку косинусоида отстает от синусоиды на 90, то результат совпадает
с колебанием, векторная диаграмма которого показана на рис. 5.28. Модуляционная характеристика близка к линейной при малых индексах модуляции.
Приближенно можно считать, что
uвых (t ) U m cos 0t b(t ) ,
что соответствует фазовой модуляции. В самом деле,
uвых (t ) U m cos 0t b(t )
U m cos b(t )cos 0t U m sin b(t )sin 0t .
Учитывая,
что
при
малом
индексе
модуляции
cos b(t ) 1
и
sin b(t ) b(t ) , получаем
uвых (t ) U m cos 0t U mb(t )sin 0t ,
что и реализуется схемой Армстронга.
Чтобы получить ЧМ-сигнал, нужно изменять мгновенную частоту колебания по закону изменения первичного сигнала. Несущее гармоническое
колебание вырабатывается генератором, в состав которого входит частотнозадающая цепь (например, колебательный контур). Частота колебаний определяется парамерами частотно-задающей цепи – для контура это индуктивность и емкость. Таким образом, если в такт с изменениями мгновенного
значения первичного сигнала изменяется, например, емкость контура, то будет меняться и мгновенная частота вырабатываемого колебания. Для этой
цели в частотно-задающую цепь включают варикап, на который и подаётся
первичный сигнал. Если бы мгновенная частота колебаний зависела от первичного сигнала линейно, то получаемое колебание имело бы вид (5.38). На
292
практике получение модуляционной характеристики, близкой к линейной,
осложняется тем, что резонансная частота контура зависит от емкости нелинейно, также нелинейной является зависимость барьерной ёмкости варикапа
от напряжения.
Один из способов частотной модуляции несущего колебания звуковым
первичным сигналом основан на использовании конденсаторного микрофона, который включается параллельно основному конденсатору частотнозадающего колебательного контура.
Поскольку мгновенная частота и фаза связаны как производная и первообразная, ФМ-сигнал можно получить, если несущее колебание промодулировать по частоте продифференцированным первичным сигналом. Аналогично, фазовая модуляция проинтегрированным первичным сигналом эквивалентна частотной модуляции. Эти методы угловой модуляции называются косвенными.
Преимущество угловой модуляции – более высокая по сравнению с
АМ помехоустойчивость – проявляется при больших значениях индекса. Получение модуляционной характеристики, близкой к линейной при достаточно
большой девиации фазы, составляет серьёзную проблему.
Увеличить девиацию фазы (или частоты) можно, подав УМ-колебание
на умножитель частоты (см. п. 5.5.1). При этом преобразовании частóты всех
составляющих сигнала увеличиваются в определенное целое число раз. Поэтому во столько же раз увеличиваются и ширина спектра, девиация частоты
и девиация фазы. Если нужно, несущую частоту затем можно понизить путем
переноса спектра вниз (см. п. 5.1). Увеличить девиацию фазы можно также
путем каскадного включения нескольких синхронно работающих модуляторов [25].
Здесь были рассмотрены лишь наиболее простые для понимания способы получения УМ-колебаний. Более сложные способы, применяемые в современной аппаратуре связи, рассматриваются в специальных курсах.
293
5.7.4. Детектирование УМ-колебаний
Детектирование УМ-сигналов осуществляется несколькими способами.
Синхронное детектирование ФМ-колебаний.
При малом индексе модуляции для демодуляции ФМ-сигналов можно
использовать синхронный детектор, подобный применяемому для детектирования АМК, за исключением фазы опорного колебания, рис. 5.31. Если на
вход перемножителя подать напряжение uФМ (t ) U m sin 0t b(t ) , а в качестве опорного колебания использовать напряжение uоп (t ) U cos 0t , то
напряжение на выходе перемножителя будет равно
uвых (t )
U mU
U U
sin b(t ) m sin 20t b(t ) .
2
2
При условии, что индекс модуляции не превышает 20…30°, можно
принять sin b(t ) b(t ) ; ВЧ составляющая может быть подавлена фильтром
нижних частот, тогда результирующий выходной сигнал пропорционален
первичному сигналу:
uвых (t )
U mU
b(t ) .
2
uФМ (t )
uвых (t )
ФНЧ
U cos 0t
Рис. 5.31. Синхронное детектирование ФМ-колебаний
Отметим, что схема, показанная на рис. 5.31, выделяет квадратурную
компоненту узкополосного сигнала.
Диодное детектирование ФМ-сигналов.
Для детектирования ФМ-сигналов может быть использован диодный
детектор, на вход которого подается сумма ФМ-сигнала и гармонического
294
опорного колебания, Рис. 5.32,а. При таком суммировании получается колебание, амплитуда которого изменяется в такт с изменениями фазы.
uФМ (t )
uвых (t )
C
R
uоп (t )
а
б
Рис. 5.32. Диодный детектор ФМ-колебания
Принцип детектирования поясняется векторной диаграммой (рис.
5.32,б), где опорное напряжение равно
uоп (t ) U оп cos 0t ,
а ФМ-сигнал uФМ (t ) U m sin 0t b(t ) U m cos 0t / 2 b(t ) ; угол
определяется первичным сигналом b(t ) . При изменении угла амплитуда
суммарного напряжения, приложенного ко входу диодного детектора, изменяется в соответствии с выражением
2
2
U вх U ФМ
U оп
2U ФМU оп cos .
При 90 характеристика детектора близка к линейной.
Для расширения линейного участка применяют балансную схему фазового детектора (рис. 5.33), где амплитуды напряжений на входах диодов
определяются выражениями
295
а
б
Рис. 5.33. Балансный
й фазовый детектор
д
2
2
U вх1 U ФМ1
U оп
2U ФМ1U оп cos
c ,
(5.455)
2
2
U вх2 U ФМ2
U оп
2U ФМ2U оп cos
c ,
(5.466)
где U ФМ1 и U ФМ2 – напряжен
н
ния на секкциях втор
ричной оббмотки тр
рансформ
маходное наапряжени
ие детекттора проппорционал
льно разн
нотораа, рис. 5.33,б. Вых
сти U вх1 U вх2 . Заввисимостьь выходн
ного нап
пряжения от угла показаана
инией наа рис. 5.334 (ампл
литуды оп
порного и модулированноого
сплоошной ли
напрряжения приняты
п
равными
и друг дру
угу). Штриховые ллинии соо
ответствую
ют
вырражениям (5.45) – (5.46). Ви
идно, что
о детекторная хараактеристи
ика практтическки линейн
на при изм
менении уугла от 0 до 180°.
Рис. 5.34
4. Характерристика бал
лансного фаазового деттектора
Детект
тировани
ие ЧМ-сиггналов.
Детекттированиее ЧМ-сигн
налов мож
жно выпо
олнить прри помощ
щи фазовоого
детеектора, после
п
чего
о выходн
ной сигнаал следуеет продиф
фференци
ировать. (В
2
296
самом деле, фазовый детектор вырабатывает напряжение, пропорциональное
изменяющейся начальной фазе УМ-колебания. Но при частотной модуляции
начальная фаза пропорциональна интегралу первичного сигнала, откуда и
следует высказанное утверждение).
Второй вариант заключается в преобразовании частотной модуляции в
фазовую. Для этого ЧМ-сигнал подается на цепь с линейной ФЧХ. Роль такой цепи может выполнить резонансный усилитель, настроенный на среднюю частоту ЧМ-сигнала, если добротность колебательного контура не
слишком высока, так чтобы изменения мгновенной частоты ЧМ-колебания
происходили в пределах линейного участка ФЧХ. Выходной сигнал, который
подаётся на фазовый детектор, оказывается модулированным как по частоте,
так и по фазе, поэтому для получения правильного результата демодуляции
(то есть чтобы частотная модуляция не влияла на выходной сигнал детектора) в качестве опорного колебания в фазовом детекторе нужно использовать
не гармоническое колебание, а входной ЧМ-сигнал. Кроме того, при прохождении контура сигнал приобретает ещё и паразитную амплитудную модуляцию, которую устраняют путем жесткого амплитудного ограничения сигнала
(до фазового детектирования!).
Еще один способ частотного детектирования состоит в преобразовании
ЧМ-сигнала в АМ-сигнал, который затем детектируется обычным диодным
детектором. Преобразование ЧМ-сигнала в АМ-сигнал производится путем
подачи ЧМ-сигнала на резонансный усилитель с расстроенным контуром,
рис. 5.35. Резонансная частота контура выбирается таким образом, чтобы изменения мгновенной частоты ЧМ-колебания происходили в пределах приближённо линейного участка на склоне резонансной кривой142. Перед таким
преобразованием ЧМ-сигнал пропускают через усилитель-ограничитель с
тем, чтобы избавиться от паразитной АМ, возникающей при прохождении
142
Сигналы ЧМ-радиостанции, таким образом, можно принимать при помощи АМ-приемника, если его
слегка расстроить относительно несущей частоты (правда, качество приема будет невысоким)
297
сигн
нала череез канал связи,
с
в коотором деействуютт помехи, замирани
ия и друггие
вред
дные факкторы, пр
риводящи е к измен
нениям амплитуды
ы сигналаа. Повыш
шение качестваа преобраззования Ч
ЧМ в АМ
М достигаеется проттивофазны
ым (балан
нсм) включеением дву
ух усилиттельных каскадов
к
с резонаннсными нагрузкам
н
ми,
ным
рассстроенными симмеетрично оотносител
льно несу
ущей часттоты, тогд
да их общ
щая
хараактеристи
ика имеетт более ши
ирокий раабочий уч
часток, риис. 5.36.
Риис. 5.35. АЧ
ЧХ резонан
нсного касккада.
Штриховвыми линияями выделеен
раабочий учаасток
Рис. 5.36. Совместнаая дискрими
инаторная
характеристика ддвух резонаансных
каскад
дов. Штрихховыми лин
ниями
вы
ыделен рабоочий участок
Ещё од
дин спосо
об ЧМ-детектирования реал
лизуется в приемн
никах на осо
новее системы
ы фазовой
й автоподдстройки частоты (ФАПЧ),, рис. 5.37. В состтав
систтемы ФА
АПЧ вход
дят фазоввый детеектор ФД
Д и генерратор, уп
правляемы
ый
напрряжением
м (ГУН). Фазовый
й детектор
р служит для измеерения раазности фаз
ф
ЧМ--сигнала uчм (t ) и колебан
ний генератора s (t ) ; сигналл ошибки
и e(t ) , прропорц
циональн
ный этой разности
и фаз, по
оступает на
н управлляющую схему УС,
У
котоорая вырабатываетт напряж
жение u (t ) , задающ
щее частооту колеб
баний ГУ
УН
(заввисимостьь частоты
ы от напряяжения должна
д
бы
ыть близкка к линеейной). Это
Э
жение и ррассматри
ивается как резулььтат детектирован
ния
упраавляющеее напряж
[9].
2
298
Рис. 5.37
7. Детектоор ЧМК на
н основе системы ФАПЧ
Находи
ит примен
нение таккже часто
отный детектор сччётного типа.
т
При
инцип его дейсствия зак
ключаетсяя в преоб
бразовани
ии ЧМ-сиигнала в напряжен
н
ние
моугольн
ной формы (путем
м усилени
ия и ампл
литудногоо огранич
чения). Это
Э
прям
напрряжение преобраззуется в последо
овательно
ость импуульсов стандартн
с
ной
форрмы, частоота следо
ования котторых пр
риближённо равна мгновенн
ной частооте
ЧМ--сигнала. Импульссы поступ
пают на фильтр
ф
ни
ижних чаастот, который выд
деляетт постоян
нную состтавляющуую, пропо
орциональьную част
стоте след
дования ими
пулььсов и, слледовател
льно, мгноовенной частоте
ч
ЧМ-сигналла [9].
5.8.
Дискретная мо
одуляция
я
В соврременных
х средстввах связи
и широко использзуются методы ди
ис-
креттной (циф
фровой) модуляци
м
ии143, коггда модул
лируемыйй параметтр переноосчикаа сохраняяет в прееделах врременнóго
о интерваала опредделенной длины поп
стояянное знаачение, а при
п перехходе к слеедующем
му такомуу же интер
рвалу мен
няетсяя скачкообразно. На
Н каждом
м интерваале перед
даётся одиин символ
л канальн
ного ккода. Таки
им образом, модуулированн
ный сигнал имеет вид посл
ледователльностти элемен
нтарных сигналов,
с
, называем
мых посы
ылками и отличающихся дрруг
от д
друга неккоторыми
и параметтрами (аамплитудо
ой, частоотой, начальной фаф
зой))144. В сооответстви
ии с этим
м различаают амплитудную,, частотн
ную и фаззо-
143
Ди
искретная или
и цифровая модуляция
м
наазывается таккже манипуля
яцией
Длля передачи дискретных
д
сообщений моогут применяяться методы
ы модуляции, принципиально невозмож
жные ддля аналоговы
ых сообщени
ий, а именно м
модуляция формы
ф
посылк
ки (иногда еёё называют сттруктурной
модулляцией). Таки
им образом, дискретную
д
м
модуляцию можно
м
поним
мать как преообразование символа
с
в посылкуу (элементарн
ный сигнал).
144
2
299
вую манипуляции, также применяют комбинированные виды дискретной модуляции (например, цифровую амплитудно-фазовую модуляцию).
Выбор формы элементарного сигнала (посылки) во многом определяет
свойства цифровой системы связи, поэтому является важным этапом проектирования системы. Обозначим посылку v(t , ) , где – канальный кодовый
символ. Сигнал цифровой модуляции имеет вид
bц (t )
v t nTп , n ,
n
где n – n -й символ в кодовой последовательности, Tп – длительность посылки. Наиболее простой вид этот сигнал имеет, если посылка представляет
собой прямоугольный радиоимпульс. Однако спектральная плотность прямоугольного импульса нефинитна, а любой канал связи имеет ограниченную
полосу пропускания. Поэтому при распространении такого сигнала неизбежно происходит его «размазывание» по временной оси, что приводит к межсимвольной интерференции – на очередную посылку накладыватся «хвосты»
предшествующих посылок. Межсимвольная интерференция может приводить к ошибкам при принятии решения о принимаемом символе (подробнее
см. разд. 9). Прямоугольный радиоимпульс жёстко ограничен по времени, но
его спектральная плотность очень медленно убывает по оси частот. Поэтому
система связи с прямоугольными посылками может создавать помехи другим
системам, работающим в соседних частотных каналах.
Другой крайний случай – посылка с прямоугольной спектральной
плотностью, занимающей всю полосу частот данного канала. Предположим,
что эта полоса представляет собой интервал
f0 F , f0 F
шириной 2F с
центральной частотой f0 , тогда посылка имеет вид
v(t ) 2 F
sin 2 Ft
cos 2 f0t
2 Ft
(5.47)
300
и бесконечную длительность, рис. 5.38. Следовательно, каждая текущая посылка суммируется со всеми предшествующими посылками, что сильно искажает её форму. Если решение о каждом принятом символе принимается по
единственному отсчету наблюдаемого колебания и этот отсчет берется через
интервал T 1 / (2 Fв ) , то межсимвольная интерференция не влияет на правильность решений, т.к. функция v(t ) принимает нулевые значения при всех
значениях t nT (см. п. 2.11). Однако на практике не всегда удается обеспечить взятие всех отсчётов в нужное время с достаточной точностью, поэтому
желательно, чтобы «хвосты» посылок были минимальными. Посылка (5.47)
убывает слишком медленно из-за того, что её спектральная плотность имеет
прямоугольный вид (содержит скачки). Для быстрого убывания посылки
необходимо, чтобы спектральная плотность была достаточно гладкой функцией.
Рис. 5.38. Посылка с постоянной в полосе частот спектральной плотностью
На практике часто используют посылку в виде радиоимпульса с огибающей колоколообразной формы. Такие импульсы достаточно компактны и
во временной, и в частотной области. В качестве огибающей посылки v(t )
2
можно выбрать видеоимпульс гауссовской формы s (t ) Ae t , имеющий
2
спектральную плотность также гауссовского вида S ( f ) Be f , где
B A / , 2 / . Такой сигнал не финитен ни по времени, ни по частоте, но он имеет минимальную эффективную «площадь» на плоскости время – частота (произведение эффективной длительности на эффективную ширину спектра, см. Приложение 4). Колоколообразный (колокольный) импульс
301
иногда аппроксимируют другими функциями (например, функцией «припод2 t
1 1
, где A – амплитуда, – длительность имнятый косинус» A cos
2 2
пульса).
5.8.1. Цифровая (дискретная) амплитудная модуляция (ЦАМ, ДАМ), или
амплитудная манипуляция.
При цифровой амплитудной манипуляции гармонического несущего
колебания модулированный сигнал можно представить в виде
uЦАМ (t ) 1 M bnv t nTп U m cos(0t 0 ) ,
n
(5.48)
где U m – амплитуда несущего колебания, M – коэффициент, управляющий
глубиной амплитудной манипуляции, bn – значение цифрового сигнала,
отображающее n -й канальный символ n в передаваемой последовательности. Напомним, что цифровой сигнал может принимать значения из заданного конечного множества. Демодуляцию сигнала можно осуществить при помощи синхронного детектора либо нелинейных амплитудных детекторов, как
для обычной амплитудной модуляции, с последующим принятием решений о
переданных кодовых символах. Однако ввиду наличия помех в канале этот
способ не является наилучшим. Задача построения наилучшего (оптимального) демодулятора для ЦАМ-сигналов рассматривается в разд. 9.
Как и в случае аналоговой модуляции, можно использовать ЦАМ без
несущей (цифровую балансную амплитудную модуляцию ЦБАМ). Сигнал
ЦБАМ
uЦБАМ (t ) U m bnv t nTп cos(0t 0 )
n
можно демодулировать синхронным детектором или – после восстановления
несущей – нелинейным детектором.
302
5.8.2. Цифровая (дискретная) фазовая модуляция (ЦФМ, ДФМ) или
фазовая манипуляция
Фазовая манипуляция используется очень широко благодаря высокой
помехоустойчивости (подробнее об этом см. разд. 10). Простейшим и часто
применяемым видом ЦФМ является двоичная фазовая манипуляция, когда
модулированный сигнал имеет вид
uЦФМ (t ) U m v(t nTd )cos(0t 0 n ) ,
n
где n на интервале n -й посылки равно 0 или радиан в зависимости от передаваемого символа n .
Эквивалентная форма описания двоичного ЦФМ-сигнала имеет вид
uЦФМ (t ) U m bц (t nTd )v(t nTd )cos(0t 0 ) ,
n
где bц (t nTd ) принимает значения +1 или –1, постоянные на интервале посылки. Таким образом, в этом частном случае результаты двоичной ЦФМ и
балансной дискретной амплитудной модуляции совпадают.
Демодуляция может быть выполнена синхронным детектором, для работы которого необходимо знание несущей частоты 0 и начальной фазы 0 .
Поскольку при балансной амплитудной модуляции модулированный сигнал
не содержит несущего колебания, на приемной стороне канала используется
восстановление несущей частоты при помощи возведения сигнала в квадрат
и последующего деления частоты полученного колебания на 2. Получаемое
гармоническое колебание совпадает с несущим по частоте и может использоваться в когерентном детекторе в качестве опорного колебания. Однако
начальная фаза этого колебания может отличаться от истинного значения
начальной фазы несущего колебания на 180º. Это приводит к так называемой
обратной работе, когда все двоичные символы при приёме заменяются на
обратные. Для преодоления этого недостатка применяют периодическое зон-
303
дирование канала специальным пилот-сигналом, по которому приемное
устройство устанавливает правильную начальную фазу опорного колебания.
Другим способом борьбы с неоднозначностью фазы служит применение относительной (дифференциальной) фазовой манипуляции (ОФМ, ДФМ). При
ОФМ символ «1» передается радиоимпульсом с той же начальной фазой, что
и предыдущий, а при передаче символа «0» передается импульс с начальной
фазой, отличающейся от предыдущего на 180º (или наоборот). При этом случайный «перескок» фазы опорного колебания приводит к ошибке при демодуляции только одного символа. Такие однократные ошибки могут быть исправлены при использовании помехоустойчивого кодирования.
5.8.3. Цифровая (дискретная) частотная модуляция (ЦЧМ, ДЧМ) или
частотная манипуляция
При частотной манипуляции посылки представляют собой радиоимпульсы с огибающими одинаковой формы, но с различным частотным заполнением. Набор частот фиксирован, поэтому частотную манипуляцию можно
осуществить, например, путем поочередного подключения ко входу канала
связи выходов нескольких генераторов гармонических колебаний разных частот. Однако при таком способе реализации ЧМн полная фаза канального
сигнала в общем случае может быть разрывной функцией (начальная фаза
при каждом переключении может меняться скачкообразно). Прохождение
такого сигнала через инерционные линейные устройства (например, фильтры) сопровождается переходными процессами, приводящими к возникновению паразитной амплитудной модуляции и ухудшающими пик-фактор145.
Поэтому на практике получили распространение методы цифровой частотной модуляции с непрерывной фазой (ЧМНФ); при этом изменение частоты в
соответствии с дискретным модулирующим сигналом производится не скачком, а по непрерывному закону. Ширина спектра такого сигнала заметно
145
Пик-фактором называют отношение максимальной (пиковой) мощности сигнала к его средней мощности
304
меньше,
чем
сигнала
с
разрывами
фазы.
Демодуляция
частотно-
манипулированных сигналов может быть выполнена путем обычного частотного детектирования; об оптимальной демодуляции см. разд. 10.
5.8.4. Многопозиционные сигналы
В цифровых системах связи часто применяются многопозиционные
сигналы (сигнально-кодовые конструкции), образуемые путем одновременной манипуляции различных параметров гармонического переносчика.
Например, четырехпозиционный сигнал получается независимой манипуляцией амплитуд квадратурных составляющих (гармонических колебаний с
начальными фазами, различающимися на 90º) значениями +1 и –1. На рис.
5.39, а показана амплитудно-фазовая диаграмма (созвездие) этого сигнала
(буквами s и q обозначены синфазная и квадратурная составляющие). Этот
вид модуляции известен, как четырёхпозиционная квадратурная амплитуднофазовая модуляция, сокращённо называемая КАФМ-4. (Нетрудно видеть, что
такое же созвездие можно получить четырехуровневой манипуляцией фазы
при постоянной амплитуде, равной
2 ; такая модуляция обозначается ФМ-
4). Следует отметить, что одна посылка при таком виде модуляции может
нести количество информации до 2 бит146. На рис. 5.39, б показано созвездие
сигнала КАФМ-16, получаемого независимой амплитудной манипуляцией
квадратур с уровнями +1, –1, 0.5 и –0.5. Информационная «ёмкость» посылки
при КАФМ-16 составляет 4 бита, при КАФМ-64 – 6 бит и т.д.
а
Б
Рис.5.39. Многопозиционные сигналы КАФМ-4 и КАФМ-16
146
О количестве информации и его единице бит см. разд. 8
305
Рассмотренные сигналы задаются в декартовой системе координат и
формируются путем сложения квадратурных компонент после их амплитудной манипуляции. Используя совместно манипуляцию фазы и манипуляцию
амплитуды, можно сформировать многопозиционные сигналы, заданные в
полярных координатах, рис. 5.40.
q
q
1
-1
1
-1
1
1
s
-1
а
s
-1
б
Рис.5.40. Многопозиционные сигналы, формируемые в полярных
координатах
При выборе способа модуляции для цифровой передачи следует учитывать не только количество бит на посылку, но и потенциальную помехоустойчивость системы связи. Подробнее об этом будет сказано в разд. 10, пока отметим только, что помехоустойчивость тем выше, чем больше минимальное расстояние между точками в созвездии. Понятно, что увеличить это
расстояние можно путем увеличения мощности передатчика. Если мощность
передатчика фиксирована, то следует расположить точки созвездия так, чтобы минимальное расстояние между ними было наибольшим. Один из путей
решения заключается в переходе от плоскости, в которой находится созвездие, к пространствам большей размерности [26].
5.9.
Импульсная модуляция
Импульсной модуляцией называется модуляция переносчика, имеюще-
го вид периодической последовательности импульсов одинаковой формы.
Модулирующий сигнал при этом является аналоговым. Фактически при импульсной модуляции параметрами переносчика управляют дискретные отсчеты первичного сигнала. Поэтому для передачи информации без потерь ча306
стоту следования импульсов переносчика следует выбирать исходя из ширины спектра модулирующего сигнала в соответствии с условиями теоремы отсчётов.
Как и в случае модуляции гармонического переносчика, виды модуляции различаются в соответствии с изменяемыми параметрами, см. п. 1.5. Если в соответствии с первичным сигналом изменяется амплитуда импульсов,
модуляция называется амплитудно-импульсной (АИМ), если изменяется
длительность (ширина) импульсов – широтно-импульсной (ШИМ, ДИМ), если изменяется временной сдвиг (относительно положения импульса в немодулированной последовательности) – фазоимпульсной (ФИМ) или частотноимпульсной (ЧИМ). Два последних вида модуляции аналогичны фазовой и
частотной модуляции гармонического переносчика в том смысле, что при
изменении временного сдвига в соответствии с первичным сигналом частота
следования импульсов меняется пропорционально его производной.
Рассмотрим более подробно сигнал амплитудно-импульсной модуляции. Выясним, как связаны спектральные плотности АИМ-сигнала x и (t ) и
исходного аналогового сигнала x(t ) . Примем в качестве переносчика колебание s (t )
d (t nT ) , где d (t ) – короткий импульс известной формы.
n
Преобразование Фурье для краткости будем обозначать в операторной форме
F{}
.
Периодическое колебание s (t ) можно записать в виде ряда Фурье
s (t )
k
где
Сk e jk t ,
2
, Ck – коэффициенты ряда, определяемые формой импульса d (t ) .
T
Спектральная плотность переносчика S ( ) Fs (t ) , очевидно, равна сумме
307
спектральных плотностей гармонических составляющих (комплексных экспонент) с теми же весовыми коэффициентами, то есть
jk t
S ( ) F Сk e
2 Сk ( k ) .
k
k
Поскольку АИМ-сигнал получается умножением x и (t ) x(t ) s (t ) , то его
спектральная плотность равна свёртке спектральных плотностей сомножителей
1
X и ( )
2
1
2
X( )S ( )d
-
k
X( ) 2
Ck ( k )d
k
Ck X( k )
и представляет собой совокупность копий спектральной плотности первичного сигнала X() , сдвинутых по частотной оси на величины k k
2
,
T
k , , и умноженных на весовые коэффициенты, определяемые формой
импульса d (t ) . (В частности, при d (t ) (t ) все коэффициенты равны 1).
Очевидно, если каждая копия X() занимает на частотной оси интервал, ширина которого меньше
2
, то копии не перекрываются, и можно
T
выделить
нижних
путем
фильтрации
частот
единственную
копию
X( 0 ) X( ) , тем самым восстановив первичный сигнал из АИМсигнала (т.е. выполнить демодуляцию). Таким образом, демодуляция АИМсигнала выполняется ЛИС-цепью; это исключение из общего правила147 возможно потому, что в спектре модулированного сигнала содержится целиком
147
Напомним, что в общем случае модуляция и демодуляция выполняются с использованием нелинейных
или параметрических цепей
308
спектр полезного сигнала, и обогащение спектра при демодуляции не требуется.
При этом в интервале
T
T
спектральная плотность
X и ( ) С0X( ) .
Для восстановления первичного сигнала из АИМ-сигнала должен быть
скомпенсирован весовой коэффициент C0 . Если d (t ) – прямоугольный импульс с амплитудой U и длительностью , симметрично расположенный относительно момента t 0 , то
U
Ck
T
/2
e jk t dt
- /2
Коэффициент C0
U sin(k / 2)
.
T
k / 2
U
, поэтому восстанавливающий ФНЧ должен
T
иметь прямоугольную АЧХ вида
T
,
,
K ( ) U
T
T
0 в противном случае
и импульсную характеристику
h(t ) F-1 K ( )
1
sin t
t.
U
T T
Заметим, что полученная функция совпадает (с точностью до амплитудного постоянного множителя) с нулевой базисной функцией ряда Котельникова (все остальные базисные функции образуются её сдвигами на величины, кратные шагу дискретизации). Таким образом, демодуляция АИМсигнала по смыслу и реализации близка к восстановлению аналогового сигнала по последовательности его отсчетов (ср. разд. 2).
309
В результате импульсной модуляции рассмотренных видов получаются
низкочастотные
сигналы.
Если
необходимо
передать
импульсно-
модулированный сигнал по радиоканалу, его используют для модуляции одного из параметров несущего гармонического колебания. Таким образом получаются многократные виды модуляции – АИМ-АМ, АИМ-ЧМ, ШИМ-АМ,
ШИМ-ЧМ и т.п. [9].
Контрольные вопросы
1. Что такое угол отсечки? Как выбрать оптимальный угол отсечки?
2. Для чего используются двухтактные (балансные) схемы?
3. Почему нельзя осуществить модуляцию при помощи ЛИС-цепи?
4. В чём состоит принцип преобразования частоты?
5. Искажение огибающей вследствие перемодуляции следует считать линейным или нелинейным?
6. Как выбираются параметры нагрузки для диодного детектора?
7. При помощи каких схем можно реализовать угловую модуляцию?
8. Как выполнить демодуляцию УМ колебаний?
9. Какие частоты будут присутствовать в спектре тока, протекающего через параметрический элемент, если крутизна меняется по закону
s (t ) S0 S1 cos(1t ) S 2 cos(2t ) , а напряжение – по закону
u (t ) U 0 U1 cos(0t ) ?
Упражнения
1. Некоторый элемент описывается зависимостью тока i от напряжения
u вида i au b , где a, b – константы. Является ли этот элемент ли-
нейным?
2. Найдите формулы, связывающие коэффициенты в выражениях (5.5) и
(5.6) для N 2 ; для N 3 .
310
3. Постройте колебательную характеристику нелинейного усилителя при
кусочно-линейной аппроксимации ВАХ нелинейного элемента (примите U н 1 В, U 0 1,5 В, S 2 мА/В).
4. Определите для нелинейного элемента, описываемого полиномом
(5.17), первые два слагаемых средней крутизны по 2-й и 3-й гармоникам.
5. Повторите расчеты для U н 1 В, U 0 0.5 В, S 2 мА/В. Сравните результаты.
6. Тональное АМ-колебание характеризуется следующими параметрами.
Амплитуда колебания верхней боковой частоты 10 В. Коэффициент
модуляции 0,25. Определите среднюю мощность несущего колебания и
отношение суммарной мощности боковых к мощности несущего. Постройте спектральную диаграмму.
7. Радиопередатчик с амплитудной модуляцией излучает мощность 10 Вт
в отсутствие модулирующего колебания. Найдите пиковую (максимальную) мощность при тональной модуляции, если коэффициент модуляции равен 0,5; 1.
8. Нелинейный элемент, используемый в амплитудном модуляторе, имеет
вольтамперную характеристику i 0.01 u 2 . К диоду приложено
напряжение u (t ) 0.5 0.2cos t 0.1cos t . Определите коэффициент
модуляции тока (все величины даны в системе СИ, – частоты несущего и модулирующего колебаний соответственно).
9. Запишите выражение для напряжения на параллельном колебательном
контуре диодного модулятора, описанного в п. 5.6.2, учитывающее зависимость сопротивление контура от частоты. Получите выражение,
связывающее уменьшение коэффициента модуляции с частотой модулирующего гармонического колебания и с добротностью контура.
311
10. Выведите выражение для сигнала на выходе синхронного детектора,
когда на вход поступает балансно-модулированное колебание.
11. Определите пик-фактор гармонического колебания.
312
Приложение 1
ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ВЫСШЕЙ АЛГЕБРЫ
Алгебра изучает множества абстрактных объектов вместе с операциями их комбинирования.
Множество
Понятие множества является фундаментальным, не сводится к более
общим понятиям и поэтому не поддаётся строгому определению. Интуитивное понимание множества можно выразить фразой203 «Множество есть совокупность различных элементов, мыслимая как единое целое». Задать множество можно путём перечисления его элементов, указания некоторого свойства, присущего всем элементам данного множества (и только им) и т.д.
Множество может содержать конечное число элементов, или бесконечное их
количество (в этом случае вместо слова «количество» используют термин
мощность множества, или кардинальное число204), или не содержать ни одного элемента. В последнем случае множество называют пустым и обозначают
символом . Если элемент a принадлежит множеству A (является элементом этого множества), то пишут a A , иначе a A . По соглашению для любого множества A справедливо A . Множество A является подмножеством множества B (обозначается A B ) если из a A следует a B . Если
A B и B A , то множества равны A B . Для некоторых числовых множеств введены обозначения, являющиеся общепринятыми (см. примеры).
Примеры множеств: множество страниц этой книги; множество всех целых чисел; множество вещественных чисел; множество натуральных
чисел; множество комплексных чисел; множество чисел, являющихся одновременно чётными и нечётными (пустое множество). Множество чётных
чисел является подмножеством множества целых чисел, а также подмножеством множества рациональных чисел.
Бинарная операция
Бинарная операция – правило, ставящее в соответствие паре элементов
множества некоторый элемент этого же множества (множество замкнуто относительно операции) a M , b M : (a,b) c M . Часто пишут a b c ,
обозначая операцию символом .
Примеры бинарных операций: сложение целых чисел; умножение рациональных чисел; умножение квадратных матриц фиксированного размера;
деление положительных вещественных чисел.
Полугруппа и моноид
Полугруппой называется множество M с бинарной операцией, удовлетворяющей условию ассоциативности
203
204
Приписывается Бертрану Расселу (1872–1970)
Кардинальные числа принято обозначать буквой еврейского алфавита (читается а́леф): 0 –мощность
счётного множества, 1 – мощность континуума, и т.д.
553
a M , b M , c M : a (b c) (a b) c .
Обычно операцию полугруппы называют умножением. Если в множестве существует нейтральный элемент e , такой что
a M : a e a ,
то e называется единицей, а полугруппа с единицей называется моно́идом.
Примеры: множество всех положительных целых чисел с операцией сложения – полугруппа; множество всех неотрицательных целых чисел – моноид
относительно операции сложения; то же множество – моноид относительно
операции умножения.
Группа
Группой называется множество M объектов с бинарной операцией ,
замкнутое относительно этой операции и удовлетворяющее следующим аксиомам.
1. ассоциативность x, y, z M : x ( y z ) ( x y ) z ;
2. существование нейтрального элемента e , такого что
x M : x e x ;
3. существование для каждого элемента противоположного ему
x M x 1 M : x x 1 e .
Примеры: множество всех целых чисел – группа относительно операции
сложения (аддитивная группа); множество всех положительных рациональных чисел – группа относительно операции умножения (мультипликативная группа); множество квадратных N N невырожденных матриц –
группа относительно матричного умножения (нейтральным элементом служит единичная матрица). Всякая группа является также и полугруппой, но
имеет отличительное качество: кроме сложения в аддитивной группе возможно вычитание; в мультипликативной группе кроме умножения определено деление. В группе (относительно умножения) невырожденных квадратных
матриц роль элемента, противоположного матрице A , играет обратная матрица A1 .
Коммутативная группа
Группа называется коммутативной (а́белевой), если
x, y M : x y y x .
Групповая операция в абелевой группе, как правило, называется сложением,
а нейтральный элемент – нулём.
Примеры коммутативных групп: множество всех целых чисел с операцией сложения; множество всех вещественных чисел с операцией сложения;
множество всех положительных вещественных чисел с операцией умно554
жения; множество перестановок (подстановок) упорядоченного набора из n
элементов; множество из двух чисел 0 и 1 с операцией сложения по модулю
2.
Пример некоммутативной группы: множество всех невырожденных квадратных матриц N N с операцией матричного умножения.
Подгруппа
Если подмножество группы само является группой относительно группо-
вой операции, оно называется подгруппой.
Примеры подгрупп: множество всех чётных чисел с операцией сложения –
подгруппа по отношению к множеству всех целых чисел с операцией сложения; множество всех положительных рациональных чисел с операцией
умножения – подгруппа по отношению к множеству всех положительных
вещественных чисел с операцией умножения; множество всех диагональных
матриц N N с операцией матричного умножения – подгруппа по отношению к множеству всех невырожденных квадратных матриц N N с операцией матричного умножения.
Кольцо
Кольцом называется множество с двумя бинарными ассоциативными
операциями (обычно называемыми сложением + и умножением ), причём относительно сложения оно является группой, а относительно умножения – полугруппой. Если кольцо содержит элемент, нейтральный относительно умножения, оно называется кольцом с единицей.
Примеры: множество всех целых чисел относительно обычных сложения
и умножения; множество всех полиномов любой степени с целыми коэффициентами (от некоторой заданной переменной) относительно обычных сложения и умножения.
Идеал кольца
Идеалом кольца R называется подмножество I данного кольца, пред-
ставляющее собой абелеву (под)группу по сложению и обладающую дополнительным свойством: если a I и c R , то a c I .
Примеры: множество всех чётных чисел (включая 0) представляет собой
идеал в кольце целых чисел; множество всех чисел, кратных некоторому
числу n (включая 0) представляет собой идеал в кольце целых чисел;
множество полиномов с целыми коэффициентами, кратных данному полиному – идеал в кольце полиномов с целыми коэффициентами.
Поле
555
Полем называется множество объектов с двумя бинарными ассоциативными операциями (обычно называемыми сложением и умножением),
причём относительно сложения всё множество является коммутативной
группой, а относительно умножения коммутативной группой является
множество за исключением нуля (элемента, нейтрального относительно
сложения). Таким образом, в поле запрещено деление на нуль.
Примеры: множество всех вещественных чисел относительно обычных
сложения и умножения; множество всех комплексных чисел относительно
обычных сложения и умножения; множество, состоящее из двух чисел 0 и 1
относительно сложения по модулю 2 и соответственно определённого умножения (поле Галуа GF (2) ).
Линейное пространство.
Линейным пространством L над полем называется множество элемен-
тов, называемых векторами, на котором определены две операции – сложение векторов, а также умножение вектора на скаляр (элемент поля ).
При этом относительно сложения векторов L является абелевой группой
(нейтральный элемент 0 называется нулевым вектором), а умножение
вектора на скаляр удовлетворяет условиям:
1) ассоциативность x L , : ( x) ( ) x x ;
2) существование в поле нейтрального по умножению элемента – единицы: 1 : x L :1x x ;
3) дистрибутивность сложения векторов и умножения векторов на скаляры (правила раскрытия скобок)
( x y ) x y ,
x, y L, , :
( ) x x x .
Примеры: множество всех непрерывных вещественных функций одной вещественной переменной, принимающей значения из интервала , с
операцией поточечного сложения и умножения на вещественный коэффициент – линейное пространство над полем вещественных чисел; множество
всех двоичных векторов длины N с операцией поэлементного сложения по
модулю 2 и умножения вектора на скаляр 0 или 1 – линейное пространство
над полем Галуа GF (2) .
Алгебра над полем.
556
Алгебра (над полем ) – это векторное пространство L над полем ,
снабжённое операцией умножения векторов, которое удовлетворяет
условиям билинейности:
x, y, z L : x y z x z y z ,
x, y, z L : x y z x y x z ,
x, y L, : ( x) ( y ) ( )( x y ) .
Примеры: множество квадратично интегрируемых непрерывных вещественных функций одной вещественной переменной, принимающей значения из
интервала , с операциями поточечного сложения функций, умножения
функции на вещественный коэффициент и умножения функций – алгебра над
полем вещественных чисел; множество абсолютно суммируемых вещественных последовательностей с операциями поэлементного сложения последовательностей, умножения последовательности на вещественный коэффициент и дискретной свёртки последовательностей – алгебра над полем
вещественных чисел.
557
Приложение 2
КОМПЛЕКСНЫЕ ЧИСЛА И ДЕЙСТВИЯ НАД НИМИ
Необходимость введения комплексных чисел возникла при изучении
алгебраических уравнений: оказалось, что некоторые уравнения не имеют
решений во множестве вещественных чисел. Например, при некоторых наборах коэффициентов квадратного уравнения дискриминант, находящийся под
знаком квадратного корня, оказывается отрицательным. Если принять, что
некоторое число i удовлетворяет условию i 2 1 , то все алгебраические
уравнения имеют решения (количество корней равно степени уравнения), но
корни в общем случае являются комплексными, т.е. выражаются в виде
a i b , где a и b – вещественные числа, называемые соответственно вещественной (действительной) и мнимой частями комплексного числа. Число i ,
называемое мнимой единицей, в электро- и радиотехнике обычно обозначают буквой j (читается «йот»), т.к. буква i резервируется для обозначения
мгновенного значения силы тока.
Для наглядности комплексные числа представляют точками (векторами) на плоскости с декартовыми координатами a и b . При этом горизонтальная ось считается вещественной, а вертикальная – мнимой. Все точки
вещественной оси представляют вещественные числа. Точки мнимой оси
изображают чисто мнимые числа.
Точку (вектор) на комплексной плоскости можно также задать посредством полярных координат – длины вектора и угла между вещественной
осью и вектором. Величины и называются модулем и аргументом комплексного числа. Таким образом, обе формы представления комплексного
числа z эквивалентны. Справедливы следующие соотношения:
z a jb e j ,
a Re z cos ; b Im z sin ;
z a 2 b 2 , arg z .
Отметим, что для числа 0 j 0 модуль равен 0, а аргумент можно задать произвольно.
Несмотря на векторное представление, комплексные числа являются
скалярами. Множество всех комплексных чисел представляет собой поле (см.
Приложение 1) и обозначается буквой . Иными словами, на множестве
комплексных чисел определены операции сложения и умножения, для каждого комплексного числа z a jb существует (единственное) обратное по
сложению число z a jb , и для каждого ненулевого числа z e j су1
ществует (единственное) обратное по умножению число 1 / z e j .
558
Число z a jb e j называется сопряжённым по отношению к
z z
z z
числу z a jb e . Следовательно, a Re z
, b Im z
.
2
2j
Полагая 1 , отсюда легко получить формулы Эйлера:
j
e j e j
e j e j
, sin
, e j cos j sin .
cos
2
2j
Благодаря связи экспоненты с мнимым показателем и тригонометрических функций cos и sin в электротехнике нашло широкое применение символическое представление гармонических колебаний проекциями вращающегося (с постоянной угловой скоростью) вектора на вещественную и мнимую оси комплексной плоскости. В самом деле, гармоническое колебание
A cos(t ) Re Ae j (t ) , аналогично A sin(t ) Im Ae j (t ) . Использование понятия комплексной амплитуды A Ae j упрощает решение
задач, связанных с анализом цепей при воздействии на них гармонических
колебаний. Обобщение этого метода на произвольные сигналы приводит к
модели аналитического сигнала.
559
Приложение 3
ДОКАЗАТЕЛЬСТВО НЕРАВЕНСТВА ШВАРЦА
Доказательство [4] основано на использовании свойства скалярного произведения
( x, y ) ( y , x )* .
Пусть x и y – векторы, а
– скаляр. Образуем вектор
его нормы, очевидно, неотрицателен при любом
x y ; квадрат
:
0 x y, x y
x, x y, x * x, y
Примем
2
y, y .
( x, y )
( x , y )( y , x )
. Тогда ( y , x )
,
( y, y )
( y, y)
2
( x, y)* ( x, y) ( y, x)( x, y)
( x, y )
( y, x)( x, y )
2
( x, y)
, ( y, y )
.
( y, y )
( y, y )
( y, y )
( y, y )
*
2
( x, y )
( x, y )( y, x)
Таким образом, ( x, x)
( x, x )
0 , откуда следует не( y, y )
( y, y )
равенство Шварца ( x , x )( y , y ) ( x , y ) 2 , или в иной форме ( x, y ) x y .
560
Приложение 4
ПРИНЦИП НЕОПРЕДЕЛЕННОСТИ В ТЕОРИИ СИГНАЛОВ
Одно из фундаментальных свойств преобразования Фурье заключается
в том, что короткие сигналы имеют широкий спектр и наоборот – сигналы с
узким спектром имеют большую длительность. Таким образом, можно характеризовать сигнал произведением его длительности на ширину занимаемой им полосы частот. С другой стороны, известно, что функции, связанные
парой преобразований Фурье, не могут быть одновременно финитными. Поэтому необходимо ввести эффективную длительность сигнала и эффективную ширину спектра. С этой целью используются выражения
2
2 2
2
2 2
t s ( t)dt ts (t)dt (t t0 ) s ( t)dt
(T )2
,
2
2
2
s ( t)dt s ( t)dt
s ( t)dt
(П4.1)
где
ts
t0
2
( t)dt /
и
2
(F )
s
2
( t)dt
,
(П4.2)
2
f 2 S ( f ) df
,
(П4.3)
2
S ( f ) df
Величины (T )2 и (F )2 вычисляются аналогично дисперсии случайной величины (с учётом нормировки к энергии сигнала), t0 – аналогично математическому ожиданию (ср. разд. 3).
Величины 2T и 2F имеют размерности времени и частоты соответственно и могут быть использованы в качестве эффективной длительности
сигнала и эффективной ширины его спектра. Величина t0 представляет собой
561
временной сдвиг и поэтому на длительность не влияет. Для простоты далее
примем t0 =0.
Учтём, что в соответствии с теоремой дифференцирования
s '(t ) j 2 fS ( f ) .
Равенство Парсеваля для производной сигнала приобретёт вид
2
2
f
2
2
S ( f ) df
2
s'
(
t
)
dt .
Умножим (T )2 на (F )2 :
t
2 2
s ( t)dt
(T ) 2 (F ) 2
s
2
f
2
t
S ( f ) df
( t)dt
2
s ( t)dt
2
S ( f ) df
2 2
s' (t )
2
s 2 ( t)dt
2
dt
.
2 2
Применяя к числителю неравенство Шварца, можно записать
ts( t)s' (t )dt
2T F
.
s
2
(П4.4)
( t)dt
Интеграл в числителе правой части можно взять по частям, при этом
1
ts ( t) s' (t )dt
2
1
ts 2 (t )
2
d s 2 (t )
dt 1
t
dt
2
s
2
td s
2
(t )
(t )dt .
562
В силу принадлежности сигнала пространству L2 первое слагаемое
равно нулю. Поэтому правая часть выражения (П4.4) равна ½ , и можно записать 2T F 1 / 2 , откуда
2T 2F
1
.
Полученное неравенство представляет собой формулировку принципа
неопределенности205, суть которого заключается в невозможности существования сигналов, занимающих на плоскости «время–частота» эффективную
площадь меньше чем 1 / .
Представляет интерес вопрос: существует ли сигнал, для которого эта
эффективная площадь равна 1 / ?
Неравенство Шварца превращается в равенство, когда kts (t ) s '(t ) , где
k – некоторое число (см. (П4.4)). Тогда
s '(t )
kt . Интегрирование этого выs(t )
ражения даёт ln s(t ) kt 2 / 2 const , откуда s (t ) ekt
2
/2
. Принимая k 0
(только при этом условии сигнал принадлежит пространству L2 ) получаем
2
гауссовский импульс s (t ) Ae t (см. Пример 2.25).
205
аналог известного в физике принципа неопределенности Гейзенберга
563
НЕКОТОРЫЕ СОКРАЩЕНИЯ
АБГШ – аддитивный белый гауссовский шум (см. AWGN)
АГШ – аддитивный гауссовский шум
АИМ – амплитудно-импульсная модуляция
АКФ – автокорреляционная функция
АМ – амплитудная модуляция
АМК – амплитудно-модулированное колебание
АТС – автоматическая телефонная станция
АЦП – аналого-цифровой преобразователь
АЧХ – амплитудно-частотная характеристика
БАМ – балансно-амплитудная модуляция
БИХ – бесконечная импульсная характеристика
БПФ – быстрое преобразование Фурье
ВАХ – вольтамперная характеристика
ВКФ – взаимно корреляционная функция
ВРК – временное разделение каналов (см. TDMA)
ДАМ – дискретная амплитудная модуляция
ДИКМ – дифференциальная импульсно-кодовая модуляция
ДПФ – дискретное преобразование Фурье
ДФМ – дискретная фазовая модуляция
ДЧМ – дискретная частотная модуляция
ИКМ – импульсно-кодовая модуляция
КАФМ – квадратурная амплитудно-фазовая манипуляция
КИМ – кодоимпульсная модуляция
КИХ – конечная импульсная характеристика
КРК – кодовое разделение каналов (см. CDMA)
КЧХ – комплексная частотная характеристика
ЛИС – линейная инвариантная к сдвигу (цепь)
МАВ – (оценка) максимума апостериорной вероятности
МП – (оценка) максимума правдоподобия
НЭ – нелинейный элемент
ОБП – однополосная модуляция (одна боковая полоса)
ОКФМ-4 – относительная квадратурная фазовая манипуляция
ОС – обратная связь
ОСШ – отношение сигнал/шум
ОФМ – относительная фазовая манипуляция
ПЛИС – программируемая логическая интегральная схема
ПРВ – плотность распределения вероятностей
СВ – случайная величина
СКО – среднеквадратическое отклонение
СП – случайный процесс
564
СПМ – спектральная плотность мощности
ССП – стационарный случайный процесс
УМ – угловая модуляция
ФИМ – фазоимпульсная модуляция
ФМ – фазовая модуляция
ФМ-4 – 4-позиционная (квадратурная) фазовая манипуляция
ФНЧ – фильтр нижних частот
ФЧХ – фазочастотная характеристика
ЦАМ – цифровая амплитудная модуляция
ЦАП – цифроаналоговый преобразователь
ЦКАМ – цифровая квадратурная амплитудная модуляция
ЦФМ – цифровая фазовая модуляция
ЦЧМ – цифровая частотная модуляция
ЦОС – цифровая обработка сигналов
ЦСП – цифровой сигнальный процессор
ЧИМ – частотно-импульсная модуляция
ЧИЦ – частотно-избирательная цепь
ЧМ – частотная модуляция
ЧМНФ – частотная модуляция с непрерывной фазой
ЧРК – частотное разделение каналов (см. FDMA)
ШИМ – широтно-импульсная модуляция
ШПС – шумоподобный сигнал
AWGN – additive white Gaussian noise (см. АБГШ)
CDMA – code division multiple access (см. КРК)
FDMA – frequency division multiple access (см. ЧРК)
TDMA – time division multiple access (см. ВРК)
565
ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ
x(t ) , s (t ) – аналоговый сигнал, колебание
x[n] – дискретный сигнал (последовательность)
b(t ) – первичный сигнал
f – циклическая частота
– круговая (угловая) частота
(t ) – мгновенная круговая частота колебания с угловой модуляцией
– поле вещественных (действительных) чисел
– поле комплексных чисел
– произвольное поле
Tc – длительность сигнала
Fс – полоса частот (ширина спектра) сигнала
Dc – динамический диапазон сигнала
Vс – объем сигнала
Tк – время действия канала;
Fк – полоса пропускания канала;
Dк – динамический диапазон канала
Vк – емкость канала
(t ) – дельта-функция Дирака
u (t ) – функция включения Хевисайда
[n] – дельта-последовательность
u[n] – единичная ступенчатая последовательность
– квантор всеобщности (читается «для всех»)
– квантор существования (читается «существует»)
– множество элементов, указанных в скобках
– знак принадлежности элемента множеству
T
– произвольное преобразование
L
– произвольный оператор
x(t ) X ( f ) – функции времени и частоты, связанные парой преобразований Фурье
L – пространство аналоговых сигналов, определенных на всей временной оси
L2 (T ) – пространство аналоговых сигналов ограниченной энергии,
определенных на интервале времени T
L2 ( F ) – пространство аналоговых сигналов ограниченной энергии,
имеющих ограниченную полосу частот F
l2 – пространство последовательностей ограниченной энергии
( x, y ) – скалярное произведение сигналов (векторов)
566
x h – свёртка функций x () и h() , а также дискретная свёртка последовательностей
– прямая сумма пространств
x 2 – норма сигнала, соответствующая пространству L2 или l2
P
– вероятность случайного события, указанного в фигурных скобках
E
– обозначение усреднения по ансамблю
() – обозначение усреднения по ансамблю
– обозначение усреднения по времени
H ( ) – энтропия источника сообщений
I ( , ) – взаимная информация источников A и B
567
ПРЕДМЕТНО-ИМЕННОЙ
УКАЗАТЕЛЬ
Абель Н.Х.
Автогенератор
Бод
Бодо Ж.М.Э.
Варактор
Варикап
Автоколебания
Вектор
―
Автомат конечный
Верность
Аксиомы
Вероятность
― апостериорная
― априорная
― ошибки
― условная
Алфавит
Анализатор спектра
Аппроксимация
― кусочно-линейная
― полиномиальная
― степенная
― экспоненциальная
собственный
Видеоимпульс
Винер Н.
Армстронг Э.
Галуа Э.
Архимед
Гамма
Ассоциативность
Гетеродин
Аттенюатор
Гиббс Дж.У.
Аутентификация
Гилберт Э.
АЦП
Гильберт Д.
Базис
―
―
―
―
―
―
взаимный
ортогональный
ортонормальный
полный
самосопряженный
сопряженный
Байес Т.
Баланс
―
―
Гипотеза
― простая
― сложная
Граница
―
―
―
―
Варшамова–Гилберта
Плоткина
Синглтона
Хэмминга
Граф
амплитуд
фаз
Группа
― абелева
― коммутативная
Берг А.И.
Бессель Ф.В.
БИХ-фильтр
Девиация
― фазы
568
―
частоты
Дельта-модуляция
Зашифрование
Знак
Дельта-символ Кронекера
Дельта-функция
Имитовставка
Декодер
Инвертор
Декодирование
Индекс модуляции
Демодулятор
Дерево
Интеграл
― Дюамеля
― корреляционный
― Фурье
Детектирование
Интервал корреляции
Детектор
― амплитудный
― балансный
― диодный
― когерентный
― огибающей
― синхронный
― транзисторный
― фазовый
Информация
― взаимная
Демодуляция
Искажения
― линейные
― нелинейные
Источник сообщений
― без памяти
― марковский
Децибел
Джиттер
Дисперсия
Канал связи
― идеальный
― линейный
― линейный случайный
― нелинейный
― нестационарный
― с аддитивным шумом
― с многолучевым распространением
― фильтровой
Дистрибутивность
Каузальность
Достоверность
КИХ-фильтр
Дюамель Ж.М.К.
Ковариация
Диаграмма
― векторная
― обмена
― решётчатая
― состояний
― спектральная
Дискретизация
Код
Емкость канала
Замирания
―
―
―
―
―
блоковый
корректирующий
линейный
неравномерный
низкоплотностный
569
―
―
―
―
―
―
равномерный
свёрточный
Хаффмана
Хэмминга
циклический
Шеннона–Фано
Коэффициент
― гармоник
― детектирования
― корреляции
― модуляции
Криптоанализ
Кодек
Криптограмма
Кодер
Криптография
Кодирование
― источника
― канальное
― помехоустойчивое
― с предсказанием
― статистическое
― экономное
― энтропийное
Криптология
Кодовая книга
Кодовое слово
Колебание
― бигармоническое
― балансно-модулированное
― несущее
― опорное
Критерий
― Байеса
― идеального наблюдателя
― максимального правдоподобия
― Найквиста
― оптимальности
Лаплас П.С.
Линейная оболочка
Линейный оператор,
― собственные значения
― собственные векторы
Колмогоров А.Н.
Комбинационные частоты
Комбинация
― кодовая
― линейная
Манипуляция
― амплитудная
― частотная
― фазовая
Коммутативность
Марков А.А.
Коммутация
Межсимвольная интерференция
Компандирование
Компонента
― квадратурная
― синфазная
Метод анализа цепей
― временной
― операторный
― спектральный
― комплексной огибающей
Континуум
Метрика
Коррелометр
Модем
Коррелятор
Модулятор
― Армстронга
Котельников В.А.
570
―
―
балансный
кольцевой
Модуляция
― амплитудная
― амплитудно-импульсная
― балансная
― время-импульсная
― дискретная
― импульсная
― импульсно-кодовая
― паразитная
― угловая
― фазовая
― цифровая
― частотная
Момент
―
―
―
―
―
начальный
смешанный
центральный
ковариационный
корреляционный
Обобщённая расстройка
ОБП-сигнал
Обработка
― квазиоптимальная
― оптимальная
― сигналов
― цифровая
Обратная связь
― отрицательная
― паразитная
― положительная
― частотно-зависимая
Объем сигнала
ОВОВ-устойчивость
Огибающая
― комплексная
― узкополосного процесса
Ортогональность
Основание кода
Найквист Х.
Найквиста
― годограф
― критерий
― частота
Отношение
― правдоподобия
― сигнал/шум
― шум/сигнал
Отображение
Ненадежность
Отсчет
Неравенство
― Бесселя
― Шварца
Оценка
― байесовская
― максимального правдоподобия
― несмещенная
― состоятельная
― эффективная
Нестабильность
Неустойчивость
Низкочастотный эквивалент
Норма
Передатчик
Нормализация случайного процесса
Перемешивание
Носитель функции
Перемодуляция
Нуль-пространство
Перенос спектра
571
Переносчик
Пик-фактор
Плотность распределения вероятностей
Подпространство
Поле
―
Галуа
Полнота
Получатель сообщения
Помеха
―
―
―
―
―
―
аддитивная
импульсная
мультипликативная
сосредоточенная
флюктуационная
шумовая
Помехоустойчивость
― потенциальная
Последовательность
Постоянная времени
Посылка
Правило
― максимального правдоподобия
― принятия решения
― проверки гипотез
Преобразование
― Гильберта
― Лапласа
― сигнала
― Фурье
― ― быстрое
― частоты
Преобразователь
― аналого-цифровой
― Гильберта
― цифроаналоговый
―
―
ортогональности
суперпозиции
Пропускная способность
Пространство
― гильбертово
― линейное
― метрическое
― нормированное
― полное
― сигналов
― элементарных событий
Протокол
Процедура Грама–Шмидта
Процесс случайный
― марковский
― стационарный
― ― в широком смысле
― ― в узком смысле
― узкополосный
― эргодический
Равенство Парсеваля
Радиоимпульс
Радиоканал
Разделение каналов
― временное
― кодовое
― комбинационное
― частотное
― по форме сигналов
Распределение
― гауссовское
― Гиббса
― огибающей
― Рэлея
― Рэлея–Райса
― равномерное
― начальной фазы
Расщифрование
Принцип
Реализация
572
Режим самовозбуждения
― жесткий
― мягкий
Риск
―
―
байесовский
средний
Рэлей (Стретт Дж.У.)
Ряд Котельникова
Ряд Фурье
― комплексный
― обобщенный
― тригонометрический
― усеченный
― пространственновременной
― скалярный
― случайный
― узкополосный
― шумоподобный
― цифровой
Символ
Синхронизация
Система передачи данных
Система связи
― асинхронная адресная
Скалярное произведение
Скважность
Самовозбуждение
Свертка
Связь
―
―
―
―
телеграфная
телефонная
факсимильная
фототелеграфная
Сеть связи
Сжатие
Сигнал
―
―
―
―
―
―
―
―
―
―
―
―
―
―
―
―
―
аналитический
аналоговый
Баркера
векторный
детерминированный
дискретный
импульсный
квазидетерминированный
квантованный
комплексный
континуальный
многомерный
мешающий
многопозиционный
модулированный
первичный
полезный
Скорость
― кода
― модуляции
― передачи информации
― телеграфирования
― техническая
Случайная величина
― с гауссовским распределением
― с рэлеевским распределением
Созвездие
Сообщение
― аналоговое (континуальное)
― дискретное
Спектр
― вещественного сигнала
― энергетический
Спектральная плотность
― взаимная
― мощности
― энергии
Среднеквадратическое отклонение
573
Средний квадрат
Условие нормировки
Средняя крутизна
Усреднение
― по ансамблю
― по времени
Стеганография
Стробирование
Супергетеродинный приемник
Телеграфия
― амплитудная
― ― с пассивной паузой
― частотная
― фазовая
Теорема
― Винера – Хинчина
― отсчетов
― Шеннона
Транзистор
― биполярный
― полевой
Турбо-коды
Устойчивость
Фаза
―
начальная
Фазовращатель
Фильтрация
― оптимальная
Фильтр
―
―
―
―
―
―
―
―
―
аналоговый
верхних частот
Колмогорова – Винера
нижних частот
оптимальный линейный
полосовой
режекторный
согласованный
цифровой
Угол отсечки
Формула Рэлея обобщенная
Узел коммутации
Формулы Эйлера
Умножение частоты
Функции
― Берга
― Бесселя
― моментные
― Уолша
Уплотнение
― временное
― кодовое
― комбинационное
― частотное
Уравнение
― Винера – Хопфа
― дифференциальное
― разностное
Усиление
― нелинейное
― петлевое
Усилитель
― инвертирующий
― регенеративный
Функция
― автокорреляционная
― взаимно корреляционная
― включения
― Дирака
― обобщённая
― передаточная
― потерь
― правосторонняя
― решётчатая
― собственная
― финитная
― характеристическая
574
―
Хэвисайда
Фурье Ж.Б.Ж.
Характеристика
― амплитудно-частотная
― вольтамперная
― импульсная
― колебательная
― комплексная частотная
― модуляционная
― фазочастотная
Хартли Р.
Хинчин А.Я.
Хэвисайд О.
―
―
―
―
―
Бофора
Виженера
замены
подстановки
Цезаря
Шифрование
― с открытым ключом
Шифрограмма
Шифртекст
Шум
―
―
―
―
―
белый
дробления
квазибелый
квантования
ложных импульсов
Хэмминг Р.
Цепь
―
―
―
―
―
―
―
―
―
―
безынерционная
инерционная
линейная
Маркова
нелинейная
нестационарная
инвариантная к сдвигу
параметрическая
стационарная
частотно-избирательная
Элемент нелинейный
― в качестве параметрического
Энтропия
― дифференциальная
― источника
― кода
― относительная
― совместная
― условная
Цифровая обработка сигналов
Явление Гиббса
Цифровая подпись
Ядро
―
―
―
Частота
―
―
―
―
―
дискретизации
круговая
мгновенная
Найквиста
циклическая
базисное
линейного оператора
самосопряженное
D -Преобразование
LDPC-коды
RAKE-приёмник
z-Преобразование
Шеннон К.Э.
Шифр
575
СООТВЕТСТВИЕ НЕКОТОРЫХ РУССКОЯЗЫЧНЫХ И
АНГЛОЯЗЫЧНЫХ ТЕРМИНОВ
Амплитуда – amplitude (magnitude)
Аналитический сигнал – analytic signal (pre-envelope)
Вектор [на комплексной плоскости] – phasor
Векторная диаграмма – phasor diagram
Выбеливающий фильтр – noise-whitening filter
Выкалывание (перфорация) [кода] – puncturing
Динамический диапазон – dynamic range
Дискретизация – sampling
Дисперсия – variance
Длина кодового ограничения – constraint length
Жёсткое декодирование – hard-decision decoding
Импульсная характеристика – impulse response
Квадратурная компонента – quadrature component (Q-component)
Комплексная огибающая – complex envelope
Комплексная частотная характеристика – frequency response (frequency transfer function)
Круговая (угловая) частота – radian (angular) frequency
Межсимвольная интерференция (МСИ) – intersymbol interference (ISI).
Модулированный сигнал – modulated signal
Мягкое декодирование – soft-decision decoding
Нелинейная цепь – nonlinear circuit
Низкочастотный сигнал – baseband signal
Обратная связь – feedback
ОВОВ-устойчивость (ограниченный вход – ограниченный выход) – BIBO
stability (Bounded-Input Bounded-Output)
Огибающая – envelope
Односторонняя спектральная плотность мощности – monolateral power spectral density
Опорное колебание – reference (reference signal)
Отношение сигнал/шум (ОСШ) – signal-to-noise ratio (SNR)
Плотность распределения вероятностей (ПРВ) – probability density function
(PDF)
Подмена (маскировка) частот – aliasing
Показатель качества – figure of merit
Полоса частот (ширина полосы) – bandwidth
Посылка [при цифровой модуляции] – digital waveform
Противоподменный (противомаскировочный) фильтр – anti-aliasing filter
Реализация [случайного процесса] – sample function
Свёртка – convolution
Сигнал с финитным спектром – bandlimited signal
Синфазная компонента – in-phase component (I-component)
576
Скалярное произведение – dot product
Скорость модуляции (техническая скорость) – pulse rate (symbol rate)
Слабо стационарный (стационарный в широком смысле) – weakly stationary
(stationary in the wide sense)
Случайный процесс – random process
Согласованный фильтр – matched filter
Среднеквадратическое значение [тока или напряжения] – root-mean-square
(rms) value
Среднеквадратическое отклонение [случайной величины] – standard deviation
Средний квадрат [случайной величины] – mean-square value
Строго стационарный (стационарный в узком смысле) – strongly stationary
(stationary in the strict sense)
Узкополосный сигнал – bandpass (narrowband) signal
Устройство выборки-хранения – sample-and-hold
Фазовая автоподстройка частоты (ФАПЧ) – phase-lock loop (PLL)
Фазовращатель – phase shifter
Циклическая частота – cyclic frequency
ЛИТЕРАТУРА
1. Первые панорамы поверхности Венеры. – М.: Наука, 1979. – 130 с.
2. Справочник по теоретическим основам радиоэлектроники. Под ред. Б.Х.Кривицкого.
В 2-х т. Т.2. М.: Энергия, 1977. – 472 с.
3. Владимиров В.С. Обобщенные функции в математической физике. – М.: Наука, 1976.
– 280 с.
4. Френкс Л. Теория сигналов. – М.: Сов. радио, 1974. – 344 с.
5. Колмогоров А.Н., Фомин С.В. Элементы теории функций и функционального анализа.
– М.: Наука, 1972. – 496 с.
6. Ратынский М.В. Основы сотовой связи. – М.: Радио и связь, 2000. – 248 с.
7. Корн Г., Корн Т. Справочник по математике (для научных работников и инженеров). –
М.: Наука, 1974. – 832 с.
8. Лэм Г. Аналоговые и цифровые фильтры. – М.: Мир, 1982. – 592 c.
9. Радиотехника: Энциклопедия / Под ред. Ю.Л. Мазора, Е.А. Мачусского, В.И. Правды.
– М.: Издательский дом «Додэка-XXI», 2002. – 944 с.
10. Алексеева В.Г. Расчёт формы сигналов. – Л.: Энергия, 1968. – 296 с.
11. Джерри А. Дж. Теорема отсчётов Шеннона, её различные обобщения и приложения.
Обзор. — ТИИЭР, т. 65, № 11, 1977, с. 53—89.
12. Боровков А.А. Теория вероятностей: – М.: Эдиториал УРСС, 1999. – 472 с.
13. Вентцель Е.С. Теория вероятностей. – М.: Высшая школа, 2001. – 575 с.
14. Besag J. Spatial Interaction and the Statistical Analysis of Lattice Systems. Journal of the
Royal Statistical Society. Series B (Methodological), Vol. 36, No.2, (1974), 192-236.
15. Васюков В.Н. Стационаризация гиббсовской модели конечной марковской цепи // Сиб.
журнал индустр. математики. – 2001. – Т. IV. – № 1 (7), Январь – июнь. – С. 14 – 21.
16. Бендат Дж., Пирсол А. Прикладной анализ случайных данных.– М.: Мир, 1989. – 540 с.
17. Сейдж Э., Мелс Дж. Теория оценивания и ее применение в связи и управлении. – М.:
Связь, 1976. – 496 с.
18. Вентцель А.Д. Курс теории случайных процессов. – М.: Наука. Физматлит, 1996. - 400
с.
577
19. Теория электрической связи. Учебник для вузов / Под ред. Д.Д. Кловского. – М.: Радио
и связь, 1999. – 432 с.
20. Гоноровский И.С. Радиотехнические цепи и сигналы. – М.: Радио и связь, 1986. – 512
с.
21. Пугачев В.С. Теория вероятностей и математическая статистика. – М.: Физматлит,
2002. – 496 с.
22. Papoulis A. Probability and Statistics. Prentice Hall Inc., Englewood Cliffs, NJ, 1990, 454 p.
23. Сиберт У. Цепи, сигналы, системы: В 2-х ч. Ч. 1. – М.: Мир, 1988. – 336 с.; Ч. 2. – М.:
Мир, 1988 – 360 с.
24. Данилов Л.В., Матханов П.Н., Филиппов Е.С. Теория нелинейных электрических цепей. – Л.: Энергоатомиздат, Ленинградское отд-ние, 1990. – 256 с.
25. Радиопередающие устройства: учебник для вузов / под ред. В.В. Шахгильдяна. – М.:
Радио и связь, 1990. – 432 с.
26. Скляр Б. Цифровая связь. – М.: Изд. дом «Вильямс», 2003. – 1104 с.
27. Баскаков С.И. Радиотехнические цепи и сигналы. – М.: Высш. шк., 2002. – 462 с.
28. Андреев В.С. Теория нелинейных электрических цепей. – М.: Связь, 1972. – 328 с.
29. Мюллер В.К. Англо-русский словарь. 53000 слов. – М.: Русский язык, 1990.
30. Шеннон К. Работы по теории информации и кибернетике. – М.: Изд-во иностранной
литературы, 1963. – 830 с.
31. Хэмминг Р.В. Теория кодирования и теория информации. – М.: Радио и связь, 1983. –
176 с.
32. Радиотехнические системы передачи информации: Учеб. пособие для вузов / Под ред.
В.В. Калмыкова. – М.: Радио и связь, 1990. – 304 с.
33. Nyquist H. Certain Topics in Telegraph Transmission Theory // Transactions of the A.I.E.E.,
pp. 617–644, Feb. 1928.
34. Феер К. Беспроводная цифровая связь. – М.: Радио и связь, 2000. – 520 с.
35. Мак-Вильямс Ф., Слоэн Н. Теория кодов, исправляющих ошибки. – М.: Связь, 1979. –
744 с.
36. Финк Л.М. Теория передачи дискретных сообщений. – М.: Сов. радио, 1970. – 728 с.
37. Huffman W., Pless V. Fundamentals of Error-Correcting Codes. – Cambridge University
Press 2003. – 646 p.
38. Кларк Дж., Кейн Дж. Кодирование с исправлением ошибок в системах цифровой связи. – М.: Радио и связь, 1987. – 391 с.
39. Морелос-Сарагоса Р. Искусство помехоустойчивого кодирования: методы, алгоритмы,
применение. – М.: Техносфера, 2005. – 320 с.
40. Бородин Л.Ф. Введение в теорию помехоустойчивого кодирования.– М.: Сов. радио,
1968. – 408 с.
41. Витерби Д., Омура Дж. Принципы цифровой связи и кодирования. – М.: Радио и связь,
1982. – 536 с.
42. Johnson S. Iterative Error Correction TurboCodes. – Cambridge University Press 2010,
335 p.
43. Тихонов В.И. Статистическая радиотехника. – М.: Радио и связь,1982. – 624 с.
44. Вострецов А.Г., Васюков В.Н. Эффект дрожания отсчетов в системах дискретной обработки сигналов // Радиотехника и электроника, 2003, том 48, № 5, С. 1–5.
45. Васюков В.Н. Цифровая обработка сигналов и сигнальные процессоры в системах подвижной радиосвязи: Учебник. – Новосибирск: Изд-во НГТУ, 2003. – 292 с.
46. A-Law and mu-Law Companding Implementations Using the TMS320C54x. Application
Note: SPRA163A. Charles W. Brokish, MTS Michele Lewis, MTSA SC Group Technical
Marketing Digital Signal Processing Solutions, December 1997.
47. Бабков В.Ю., Никитин А.Н., Осенний К.Н., Сиверс М.А. Системы мобильной связи с
кодовым разделением каналов. – СПб.,ТРИАДА, 2003. – 239 с.
48. Оппенгейм А.В., Шафер Р.В. Цифровая обработка сигналов.– М.: Связь, 1979. – 416 с.
578
49. Петраков А.В. Основы практической защиты информации. М.: Радио и связь, 2000. –
368 с.
50. Ященко В.В. Основные понятия криптографии // Математическое просвещение. – Сер.
3. – Вып. 2. – 1998. – С. 53 – 70.
51. Шнайер Б. Прикладная криптология. – М.: Наука, 1999.
52. Введение в криптографию / Под общ. ред. В. В. Ященко. – М.: МЦНМО, 2000. – 272 с.
53. Теория передачи сигналов: Учебник для вузов / Зюко А.Г., Кловский Д.Д., Назаров
М.В., Финк Л.М. – М.: Связь, 1980. – 288 с.
579