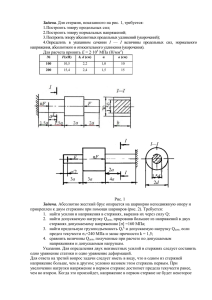
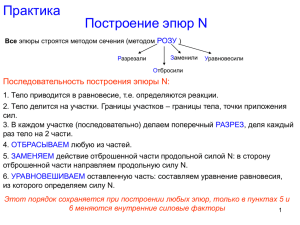
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Государственное образовательное учреждение высшего профессионального образования "ИВАНОВСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНОСТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ" Кафедра «Строительная механика» МЕТОД ПЕРЕМЕЩЕНИЙ Методические указания к выполнению расчетно-проектировочной работы по курсу «Строительная механика» Иваново – 2010 Составитель Ю.А.Федоров УДК 624.4 Метод перемещений. Методические указания к выполнению расчетнопроектировочной работы по курсу «Строительная механика»/Иван. гос. архит.-строит. ун-т.; Сост. Ю.А.Федоров. –Иваново, 2010. – 27 с. Настоящие методические указания содержат основные сведения и теоретические положения раздела «Расчет статически неопределимых рам методом перемещений», а также примеры расчета рам. В методические указания включены содержание самостоятельной расчетно-проектировочной работы по данной теме и пример выполнения задания. Методические указания предназначены для студентов заочной и дневной форм обучения специальности ПГС и АД, но могут использоваться и студентами других специальностей и форм обучения. Издание 2-е исправленное. Методические указания рассмотрены и утверждены на заседании кафедры «Строительная механика» ИГАСУ Ил. 25 Табл.3. Библиогр.: 3 назв. -2- 1. ВВЕДЕНИЕ СОДЕРЖАНИЕ РАБОТЫ И ИСХОДНЫЕ ДАННЫЕ Настоящие методические указания, предназначенные для студентов заочного и очного отделений, обучающихся по направлению «Строительство» (специальность «Промышленное и гражданское строительство», «Автомобильные дороги» и др.), содержат основные теоретические положения по теме «Расчет статически неопределимых систем методом перемещений» и примеры решения задач. Содержание расчетно-проектировочной работы. Для заданной статически неопределимой рамы (рис. 1), с выбранными по шифру из таблицы 1 (для студентов заочного отделения) или таблицы 2 (для студентов дневного отделения) размерами и нагрузкой, требуется построить эпюры изгибающих моментов, поперечных и продольных сил и определить в точке А угол поворота поперечного сечения и линейное перемещение (горизонтальное перемещение на стойке и вертикальное перемещение на горизонтальном или наклонном стержне). Выполнение работы складывается из следующих этапов: -определение степени кинематической неопределимости, -выбор основной системы и лишних неизвестных, -построение единичных и грузовой эпюр изгибающих моментов, -определение коэффициентов системы канонических уравнений, -решение системы канонических уравнений и определение лишних неизвестных, -построение окончательных эпюр изгибающих моментов, поперечных и продольных сил, -проверка правильности проведенных расчетов (статическая и кинематическая), -определение углового и линейного перемещения сечения А. Прежде чем приступать к выполнению работы необходимо изучить параграфы 1 - 5 и разобрать примеры № 1 и 2 настоящих указаний. Таблица 1 1-ая цифра шифра 1 2 3 4 5 6 7 8 9 0 ℓ1 м ℓ2 м 4 6 5 5 6 4 3 3 7 8 8 7 9 10 10 9 12 2 2 12 2-ая цифра шифра h1 м P1 т P2 т Р3 т 1 2 3 4 5 6 7 8 9 0 3 4 5 9 6 7 8 2 12 10 4 0 0 5 0 0 6 0 0 7 0 4 0 0 5 0 0 6 0 0 0 0 4 0 0 5 0 0 6 0 -3- Последняя цифра шифра (номер схемы) 1 2 3 4 5 6 7 8 9 0 q1 т м q2 т м h2 м J1:J2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 5 6 0 0 9 10 0 0 1:2 2:1 2:3 3:1 1:3 3:1 3:4 4:3 4:1 1:4 Р1 Р2 q1 1 J1 А J1 J2 Р1 3 q1 J1 J1 Р3 h1/2 J2 Р2 А J1 h1/2 Р3 q2 Р1 2 J2 J2 q2 Р2 4 Р2 J1 q1 q2 А Р3 J1 Р1 q1 h2 J1 h1/2 Р3 h1/2 J2 J1 А J2 q2 5 Р1 6 Р2 А J1 J1 J2 q1 q2 7 J1 Р3 q2 q2 Р1 q1 J1 Р3 h1/2 J2 Р1 9 q1 J1 J1 Р3 q2 /2 2 /2 /2 2 2 J2 Р2 J1 q1 Р1 J1 q2 Р3 Р2 h1/2 q1 А J2 J1 h1/2 Р2 q2 10 А J2 J2 Р1 h1/2 h2 А А J2 8 Р2 J1 J2 J1 Р3 h1/2 q1 J1 J1 h1/2 Р3 Р2 Р1 А J2 /2 /2 /2 /2 /2 /2 2 2 2 2 2 2 /2 2 Рис.1 -4- 11 12 Р1 q2 J1 J1 А J2 Р3 А J2 Р3 J2 q2 14 13 Р1 q1 Р2 J1 J2 q2 А J2 J1 J2 J1 h2 Р3 J2 h1 J2 J1 Р1 J2 J1 А J2 q1 Р2 q2 Р3 А Р3 J1 J1 h1 h1/2 q1 А Р3 J1 J2 1 /2 1 /2 Р1 А J1 J1 q2 А Р3 J1 J1 h1/2 J2 Р2 h1/2 J=∞ J2 J2 2 Р2 h2 q2 h1/2 J2 J2 q1 Р1 22 J2 J1 Р3 J2 q2 Р1 А J1 J1 Р1 J1 J2 J2 q1 h1/2 q1 Р1 q1 q1 Р2 J2 21 J2 J2 20 q2 J1 А 18 Р1 А J=∞ Р3 q2 h1/2 Р2 J2 Р2 J1 J1 J2 J2 Р3 Р2 h2/2 J2 Р1 J1 J2 h2/2 q1 J2 19 Р2 16 q2 J1 q1 J2 q2 Р2 15 17 Р1 J1 h1/2 J2 J2 J1 h1/2 Р2 Р2 q1 q1 J1 J1 J1 Р3 А q2 J2 1 /2 1 /2 1 /2 1 /2 1 /2 1 /2 1 Рис.1 (продолжение) -5- 23 24 q1 J1 Р2 J1 J1 q2 Р1 Р3 А h1/2 J1 Р1 J1 q2 J2 J2 J1 А Р3 J2 26 25 Р2 J1 J1 q1 J1 J2 J2 27 q1 Р2 А Р1 Р2 J2 q2 J1 А Р3 J1 h2 J1 J2 J2 J2 q1 28 Р1 J2 q1 h1 Р1 J2 Р3 q2 q1 J1 h1/2 J2 J2 J2 Р2 h2 Р1 h2 J1 h1/2 А Р2 J1 J1 J1 J2 А Р3 J1 h1\2 q2 J2 J2 q2 J2 J2 q1 29 30 Р1 J1 Р2 q1 h2 J1 q2 J1 Р1 Р2 J1 J1 h1/2 J1 Р3 А Р3 h1/2 J2 J2 31 J=∞ J=∞ Р1 J1 32 Р2 А J1 J2 J2 Р1 J1 Р2 h1/2 q1 А q1 J1 J2 h1/2 q2 q2 1 q2 А J2 J2 1 1 /2 1 /2 1 /2 1 /2 Рис.1 (продолжение) -6- J2 J2 1 /2 1 /2 1 /2 1 /2 Таблица 2 № п/п 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 ℓ1 м 3 4 5 6 8 3 4 5 6 8 3 4 5 6 8 3 4 5 6 8 3 4 5 6 8 3 4 5 6 8 ℓ2 м 5 3 4 5 6 5 3 4 5 6 5 3 4 5 6 5 3 4 5 6 5 3 4 5 6 5 3 4 5 6 h1 м 2 2,5 3,2 4 4,4 2 2,5 3,2 4 4,4 2 2,5 3,2 4 4,4 2 2,5 3,2 4 4,4 2 2,5 3,2 4 4,4 2 2,5 3,2 4 4,4 h2 м 1,6 2 2,5 2 2,5 1,6 2 2,5 1,6 2 2,5 1,6 2 2,5 3,2 1,6 2 2,5 2 2,5 3,2 2 2,5 3,2 2 2,5 3,2 2 2,5 3,2 q1 q2 кН/м кН/м 0 1,5 2 0 0 2 3 0 0 2,5 5 0 0 3 8 0 0 4 2 0 0 2,5 3 0 0 3 5 0 0 4 8 0 0 2,5 2 0 0 3 3 0 0 4 5 0 0 3 8 0 0 2,5 2 0 0 3 3 0 0 4 5 0 P1 кН 8 0 15 0 12 0 10 0 4 0 6 0 8 0 15 0 12 0 10 0 4 0 6 0 8 0 15 0 12 0 P2 кН 2 3 4 5 6 8 2 3 4 5 6 2 3 4 5 6 8 2 3 4 5 6 8 2 3 4 5 6 8 4 Р3 кН 0 8 0 10 0 4 0 5 0 6 0 4 0 15 0 4 0 5 0 12 0 8 0 6 0 10 0 8 0 4 J1:J2 1:2 1:3 1:4 2:1 2:3 2:5 3:1 3:2 3:4 3:5 4:3 4:5 5:2 5:3 5:4 4:1 4:3 3:4 3:2 3:1 3:5 2:5 2:3 2:1 1:2 1:3 1:4 2:3 2:5 3:2 Примечание: J1 - момент инерции поперечного сечения горизонтальных и наклонных стержней; J2 - момент инерции поперечного сечения вертикальных стержней. -7- 2. ВЫБОР НЕИЗВЕСТНЫХ Метод перемещений является одним из важнейших методов расчета статически неопределимых систем. Основан на определении перемещений точек системы, характеризующих ее деформированное состояние, и последующем вычислении внутренних усилий, соответствующих найденным перемещениям. Таким образом, в качестве лишних неизвестных метода перемещений принимаются такие перемещения некоторых точек системы, которые характеризуют деформированное состояние системы. При этом предполагается выполнение следующих условий: 1. Концы стержней сходящихся в одном жестком узле поворачиваются на один и тот же угол, который считается малым, т.е. sin φ≈φ«1, 2. Влияние поперечных и продольных сил на деформацию изгиба стержня считается малым по сравнению с влиянием изгибающего момента и не учитывается, 3. Расстояния между узлами при деформации изгиба прямых стержней не изменяются, т.е. сближение концов стержня при его изгибе не учитывается. Установим, какие перемещения необходимо и достаточно знать, чтобы можно было определить внутренние усилия в любом сечении изогнутого стержня. Для этого рассмотрим стержень АВ (рис.2), выделенный из какойлибо системы. Под действием нагрузки приложенной к системе (в том числе и к стержню АВ) стержень АВ изогнется В и переместится в новое положение A1B1, a) ∆А А которое может быть получено в резульВ1 тате следующих независимых перемеще∆А А1 ний: В1 1. поступательное перемещение стержня φА φВ АВ как абсолютно жесткого на величину ∆A (рис. 2,б). При этом стержень АВ В остается прямолинейным и внутренние А В1 усилия в нем (изгибающие моменты и б) поперечные силы) не возникают; А1 2. перемещение одного из концов стержВ1 ня АВ относительно другого на вели∆АВ чину ∆АВ (рис 2,в). При этом узлы А и в) А1 В1 В не поворачиваются; 3. поворот узла А на величину φА (рис. В1 А1 2,г); г) φВ 4. поворот узла В на величину φВ (рис. φА В1 А1 2,д); В1 5. перемещения точек оси стержня АВ с д) А1 неподвижными и защемленными кон- е) цами под действием внешней нагрузки Рис.2 к нему приложенной (рис. 2,е). 5. -8- Определить величины внутренних усилий (изгибающего момента и поперечной силы), возникающих в стержне АВ от внешней нагрузки и от каждого перемещения ∆АВ, φА и φВ в отдельности, можно воспользовавшись методом сил. Вычислив затем каким-либо образом перемещения ∆АВ, φА, φВ и, в соответствии с принципом независимости действия сил, просуммировав внутренние усилия от найденных перемещений и внешней нагрузки тем самым решим поставленную задачу. Таким образом, перемещениями, характеризующими деформированное состояние системы, являются угловые и линейные перемещения узлов системы, которые и принимаются в качестве неизвестных метода перемещений. 3. СТЕПЕНЬ КИНЕМАТИЧЕСКОЙ НЕОПРЕДЕЛИМОСТИ Степенью кинематической неопределимости m называется число неизвестных метода перемещений - углов поворота жесткиx узлов my и линейных перемещений узлов mл рамы, т. е. m =my + mл. Жестким считается узел, в котором, по крайней мере, два из сходящихся в нем стержня жестко соединены между собой (например, узлы 1 и 2 на рис. 3,а, б, в; узлы 1, 2, 3, 4 на рис. 3,г; узлы 1, 2, 3, 4, 5, на рис. 3,д; узел 1 на рис.3,е). В число жестких узлов не входят узлы, углы поворота которых известны, например, опорные защемления, узлы к которым примыкает абсолютно жесткий стержень и др. Таким образом, mу равно числу жестких узлов рамы, поворачивающихся при изгибе стержней. а) 1 б) 1 2 2 в) 1 2 г) 1 3 д) 1 3 2 4 2 е) 4 5 1 Рис.3 Для определения числа линейных перемещений узлов mл необходимо учесть, что стержни нераcтяжимы и несжимаемы в силу второго и третьего допущений, и, следовательно, линейные перемещения узлов возможны только за счет изгиба стержней. Поэтому число независимых линейных смещений узлов заданной системы равно числу степеней свободы шарнирно - стержневой системы, полученной из заданной введением во все жесткие узлы, включая опорные, полных шарниров (рис. 4,a-е). При этом все статически определимые консоли, если они имеются в системе, должны быть отброшены (рис.4,д,е). -9- Для рам изображенных на рис. 3,а-в число независимых линейных перемещений узлов равно единице mл=1. Таким перемещением является горизонтальное перемещение узлов за счет изгиба стоек, Это легко видеть, если из заданной системы образовать шарнирно-стержневую систему в соответствии с вышеприведенным правилом (рис.4,а-в). г) 1 2 д) 1 а) 1 4 3 2 б) 1 2 в) 3 2 4 1 2 5 е) 1 Рис.4 Для рам, изображенных на рис. 3,г,д число независимых линейных перемещений узлов mл =2. Такими перемещениями являются перемещения узлов, первого и второго этажей (рис. 4,г,д). В системе, изображенной на рис.3,е узел 1 линейных перемещений не имеет, т.е. mл =0. Таким образом, полное число неизвестных метода перемещений составляет для рам, изображенных на; -рис. 3,а-в m = my + mл =2 + 1=3; -рис. 3,г m = mу + mл = 4 + 2= 6; -рис. 3,д m = my + mл =5 + 2 = 7; -рис. 3,е m = mу + mл = 1 + 0 = 1. 4. ВЫБОР ОСНОВНОЙ СИСТЕМЫ Основной системой метода перемещений называется система, полученная из заданной введением дополнительных связей запрещающих угловые и линейные перемещения узлов. Для исключения угловых перемещений, необходимо на все жесткие узлы наложить моментные связи (жесткие защемления), препятствующие повороту узлов, но не препятствующие линейным перемещениям (рис. 5,а-е). Для исключения линейных перемещений узлов вводим силовые связи (шарнирно - подвижные опоры), по направлению линейных перемещений, препятствующие линейному перемещению узла, но не препятствующие повороту узла (рис. 5,а-д). Полученная основная система будет деформироваться как заданная под действием внешней нагрузки, т.е. будет эквивалентна заданной, если к основной системе приложить внешнюю нагрузку а задать угловые и линейные перемещения узлов, равные перемещениям узлов заданной системы. - 10 - а) г) 1 б) 2 1 д) 2 1 2 1 2 е) 1 5 4 3 4 3 в) 2 1 Рис.5 Для того, чтобы система изображенная на рис.6,б была эквивалентна заданной (рис. 6,а) необходимо чтобы Z1 =φ1, Z2=φ2 и Z3=∆. Полученная система, называемая эквивалентной, представляет собой набор однопролетных статически неопределимых балок двух типов: 1. балки защемленные по обоим концам (стержни 1 - 2 и 2 - С на рис. 6,б); 2. балки защемленные на одном и шарнирно - опертые на другом конце (стержни А - 1 и 1 - В на рис. 6,б). P Z2=φ2 P Z1=φ1 б) а) 1 φ1 ∆ 1 A 2 φ2 q 1 Z3=∆ 2 2 2 2 2 B Рис.6 2 q C 2 Нагрузками для них служат внешние силы и неизвестные угловые и линейные перемещения введенных связей Zj. Под действием нагрузок стержни основной системы изгибаются, а во введенных связях возникают реакции, которые представляй собой реактивные моменты в заделках и реактивные усилия в силовых связях. 5. КАНОНИЧЕСКИЕ УРАВНЕНИЯ МЕТОДА ПЕРЕМЕЩЕНИЙ В эквивалентной системе деформации и усилия должны быть равны деформациям и усилиям заданной системы. Поэтому реакции во всех введенных связях от совместного действия внешней нагрузки и искомых перемещений узлов должны быть равны нулю, поскольку в заданной системе этих связей, а значит и усилий в них, нет. Используя принцип независимости действия сил, равенство нулю реакции в каждой (j-ой) введенной связи представим в форме алгебраического уравнения относительно искомых перемещений введенных связей Zj, которые называются каноническими уравнениями - 11 - метода перемещений rj1 Z1 + rj2 Z2. +... + rjm Zm + RjF = 0 ( j = 1, 2,..., m). Здесь множители rjk - коэффициенты при неизвестных перемещениях Zk называются единичными и представляет собой реакций в j- ой введенной связи от смещения k-ой введенной связи на величинy Zk = 1; RjF - свободный коэффициент называется грузовым и представляет собой реакцию в j- ой введенной связи от внешней нагрузки. Единичные коэффициенты с одинаковыми индексами r11, r22,….., rmm, называются главными, а коэффициенты r12, r13 ..., rjk (j ≠ k ) называются побочными. Главные коэффициенты всегда положительны и не равны нулю, а побочные коэффициенты обладают свойством взаимности, т.е. rjk = rkj . Таких уравнений для заданной системы составляют столько, сколько введено дополнительных связей, т.е. число канонических уравнений всегда совпадает с числом лишних неизвестных метода, равным степени кинематической неопределимости системы Так для рамы, изображенной на рис. 6,б система канонических уравнений содержит три уравнения с тремя неизвестными r11Z1 + r12Z2+ r13Z3 + R1F = 0, r21 Z1 + г22 Z2 + r23 Z3 + R2F = 0, r31 Z1 + r32 Z2 + r33 Z3 + R3F = 0. 6. СТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ЕДИНИЧНЫХ И ГРУЗОВЫХ КОЭФФИЦИЕНТОВ Статический способ определения коэффициентов основан на использовании условий равновесия отдельных частей системы, содержащих связь, реакция в которой определяется. Для определения реакции в моментной связи (момента в заделке) необходимо вырезать узел с данной заделкой и записать условие равновесия узла в виде равенства нулю суммы моментов, действующих на узел, включив в него реактивный момент во введенной заделке rjk и изгибающие моменты, действующие в перерезанных стержнях m1 и m2 (рис. 7,а), Σmom1=rjk-m1-m2=0. a) rjk б) U 2 1 1 r jk m1 Q1 m Рис.7 m2 Q2 m2 2 моменты от поперечных сил, действующих в перерезанных Изгибающие стержнях, равны нулю в силу бесконечной малости их плеч. Реакция в силовой связи во многих случаях может быть определена из условия равновесия некоторой отсеченной части системы, содержащей силовую связь, в виде суммы проекций сил, действующих на отсеченную часть, на ось перпендикулярную перерезанным параллельным стержням системы (ось и), включая реакцию во введенной опоре rjk и поперечные силы в перере- - 12 - Таблица 3 Схемы балок, нагрузки, эпюры m A MA RA MB B EJ C RA = RB = 6uυm/ MA = υ(2u - υ)m МB = u(2υ - u)m M'C = (1 – 4u + 9u2 - 6u3)m М''C = (4u – 9u2 + 6u3)m RB υ u MB M'C - 13 - P A B MB EJ C RA u RB υ MA MB RA A RA EJ C u RB M'C MA MA RA = RB = l,5(1 - υ2)m/ MA = (l - 3υ2)m/2 M'С = (l - 1,5υ(l - υ2))m М''С = 1,5υ(1 - υ2)m M''C P A RA = υ2(1 + 2u)P RB = u2(1+2 υ)P МА=uυ2Р МB = υu2Р MC = 2u2υ2P EJ υ RA u C B EJ υ RB MA RA = υ(3- υ2)P/2 RB = u2(3 - u)P/2 MA =υ(1 - υ2)P /2 МC = υu2(3 - u)Р /2 q MB B B MC MC q MA MA MA Формулы m A M''C MA MA Схемы балок, нагрузки, эпюры Формулы RB MB MA RA = RB = q /2 MA = MB=q 2 /12 MA - 13 - A RA EJ B RB RA= 5q /8 RB=3q /8 MA=q 2 /8 Таблица 3 (продолжение) Схемы балок, нагрузки, эпюры A φ=1 B EJ RA MB RB MB MA RА = RВ = 6EJ/ 2 МА = 4EJ/ MB = 2EJ/ φ=1 B EJ RA MA RB RA = RB = 3EJ/ 2 MA= 3EJ/ MA A EJ B - 14 - RA RB MA ∆=1 MA A Формулы MB A EJ B RA RA = RB = 12EJ/ 3 МА = МВ = 6EJ/ 2 ∆=1 MA Схемы балок нагрузки, эпюры Формулы RB RA = RB = 3EJ/ 3 MA=3EJ/ 2 MA MA MB A MA B t1>t2 t2 MA EJ A MB MB ∆t = t1 – t2 R A = RB = 0 MA =MB=α∆tEJ/h MA RA B t1>t2 t2 EJ RB RA = RB = 1,5α∆tEJ/(h ) МА= 1,5α∆tEJ/h MA h - высота поперечного сечения стержня; α - коэффициент линейного расширения материала - 14 - занных стержнях Q1 и Q2. Например, для случая, изображенного на рис. 7,б ΣU= rjk – Q1 - Q2 =0. При этом предварительно должны быть вычислены внутренние усилия (изгибающие моменты и поперечные силы) в статически неопределимых балках, составляющих основную систему, на действие внешних нагрузок и смещения опор, например, методом сил. Результаты расчета для некоторых видов нагрузок приведены в таблице 3. Рассматривая условия равновесия отсеченных частей системы принимают следующее правило знаков для реакций во введенных связях rjk, RjF . Реакция положительна, если ее направление совпадает с направлением искомого перемещения узла Zj.. Поэтому составляя условия равновесия, будем направлять искомое реактивное усилие в интересующей нас связи (rjk, RjF) по направлению перемещения этой связи Z j. Составляя условия равновесия узлов и отдельных частей рам необходимо помнить, что в перерезанных стержнях основной системы от внешней нагрузки и перемещений введенных связей возникают все три внутренних усилия - изгибающие моменты М, поперечные Q и продольные силы N. При этом изгибающие моменты и поперечные силы определяются при помощи таблицы 3, а продольные силы можно определить из условия равновесия узлов рамы под действием всех сил (поперечных, продольных и внешних), приложенных к узлу. Подставляя найденные коэффициенты rjk и RJF в систему канонических уравнений и, решая ее, определяем лишние неизвестные Zj. Окончательную эпюру изгибающих моментов в заданной раме от заданной нагрузка строим используя принцип независимости действия сил: M = MF + Z1 М1 + Z2 М2 + ...+ Zm Мm . Эпюру поперечных сил строим по эпюре изгибающих моментов с учетом внешней нагрузки. Для этого представляем каждый стержень (или. часть стержня) рамы в виде шарнирно опертой по концам балки, загруженной в пролете заданной внешней нагрузкой и опорными моментами Млев и Мпр , величину которых берем с эпюры М. Тогда поперечная сила в некотором сечении стержня определяется из соотношения Q = Qб+ (Мпр - Млев)/ , где Qб величина поперечной силы в данном сечении шарнирно-опертой по концам балки длиной только от внешней нагрузки, Мпр и Млев - сосредоточенные моменты, приложенные к правому, и левому концам балки соответственно. При вычислениях, как и ранее, считают изгибающий момент положительным, если, он вызывает растяжение нижних волокон на горизонтальных стержнях и правых волокон на вертикальных стержнях. Такой момент на эпюре откладывается под стержнем или справа от него. Отрицательный момент: вызывает растяжение верхних волокон на горизонтальных стержнях и левых волокон на вертикальных стержнях. - 15 - 7. ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ q=1т/м Пример 1. Для рамы, изображенной на рис.8, определить внутренние усилия в стержнях J 1 A М, Q и N. h/2=2м 1. Вычисляем степень кинематической неC P=2т B определимости рамы m = my + mл. Поскольку h/2=2м J число неизвестных угловых перемещений равно ℓ=6м B числу жестких узлов рамы, то mу = 1. Число линейных смещений получим из рассмотрения Рис.8 шарнирно-стержневой системы, образованной из заданной рамы врезанием во все жесткие узлы, включая опорные, полных шарниров (рис. 9,а). Полученная шарнирно-стержневая система является геометрически неизменяеq а) А б) А в) А Z1 1 1 1 C В В ℓ h/2 C P h/2 C В Рис.9 мой, поэтому узел 1 не имеет линейных перемещений, т.е. mл = 0, и, следовательно, m = mу + mл = 1 + 0 = 1. 2. Образуем основную систему вводя заделку в узел 1, препятствующую его угловому перемещению (рис. 9,б). Принимая в качестве лишней неизвестной угол поворота Z1 введенной заделки (узла 1) и прикладывая внешнюю нагрузку, получим эквивалентную систему (рис. 9,в), каноническое уравнение для которой имеет вид r11Z1 + R1F = 0 . 3. Для определения коэффициентов r11 и R1F необходимо предварительно построить единичную M1 и грузовую МF эпюры. Для построения эпюры M1 поворачиваем узел 1 в основной системе на угол φ = Z1 = 1. При этом изгибаются оба стержня жестко соединенные в узле 1 (рис. 10,а). Эпюру M1 на ригеле (стержень А-1) строим используя таблицу 3 а) А б) 1 Z1=1 3ЕJ А 1 4ЕJ h M1 В Рис.10 В 2ЕJ h как для балки, защемленной на одном конце и шарнирно опертой на другом конце при повороте заделки на угол φ = Z1 = 1. На стойке (стержень В-1) - 16 - эпюру M1 строим по таблице 3 как на балке, защемленной по обоим концам при повороте верхней заделки не угол φ = Z1 = 1. Окончательно эпюра M1 представлена на рис. 10,б. Для построения эпюры МF рассмотрим грузовое состояние системы (рис. 11,а). Грузовую эпюру MF на ригеле (стержень А1) строим как на балкe, a) А б) q=1т/м 1 C А 1 P=2т h/2=2м В ℓ=6м q 2 8 Ph Ph 8 МF h/2=2м 8 В Ph 8 Рис.11 защемленной на одном конце и шарнирно опертой на другом конце загруженной равномерно распределенной нагрузкой. Согласно таблице 3 момент в заделке MF1=q 2 /8. Эпюру MF на стойке (стержень В-1) строим как на балке, защемленной по обоим концам под действием сосредоточенной силы в середине стержня. Величины моментов по концам балки MFА и MFB под силой MFС вычисляем по таблице 3, учитывая, что в данном случае v=u=1/2 Тогда MF1 = 1/2 (1/2)2 Ph = Ph/8, аналогично MFB = Ph/8. Момент под силой MFC = 2 (1/2)2 (1/2)2 Ph =(1/2)2 Ph =Ph/8. Окончательно эпюра МF представлена на рис. 11,б. 4. Определим коэффициенты r11 и R1F статическим методом. r11 - реакция в первой введенной связи (момент во введенной заделке) от поворота узла 1 на угол φ=Z1=1 определяется из условия равновесия узла 1 в первом единичном состоянии (рис. 10,а). Для этого вырезаем узел 1 в первом единичном состоянии, прикладываем к заделке искомую реакцию r11 в направлении Z1, а к перерезанным стержням прикладываем изги6ающие моменты (рис. 12,а), величину и направление которых берем с эпюры М 1 (рис.10,б). Из условия равновесия узла 1 (рис. 12,а), в виде равенства нулю a) 3EJ 1 б) r11 4EJ h q 2 8 РИС.12 1 R1F Ph 8 суммы моментов действующих на узел 1 (Σmom1=0), находим r11=3EJ/ +4EJ/h=3EJ/2. R1F - реакция в первой введенной связи (момент во введенной заделке) от внешней нагрузки определяется из условия равновесия узла 1 в грузовом состоянии (рис. 11,а). Вырезаем узел 1 в грузовом состоянии, прикладываем к заделке искомую реакцию R1F в направлении Z1, а к перерезанным стержням изгибающие моменты (рис. 12,6), величину и направление которых берем с эпюры МF (рис. 11,б). Из условия равновесий узла 1 (рис. 12,б) в виде Σmom1=0 находим R1F = q 2 /8 – Ph/8=7/2 тм. - 17 - 5. Подставляя найденные коэффициенты в каноническое уравнение и решая его определяем угол поворота узла 1 рамы Z1 = -R1F/r11 = -7/(3EJ). 6. Окончательную эпюру изгибающих моментов в стержнях рамы М построим используя принцип независимости действия сил М = МF + М1Z1. Стержень А-1: МА = 0, M1 = -q 2 /8 - (3EJ/ )(-7/(3EJ)) = -3,33 тм Стержень В -1: М1 = Ph/8 - (4EJ/h)(-7/(3EJ)) = 3,33 тм, МВ = Ph / 8 + (2EJ/h)(-7/(3EJ)) = -0,167 тм, МС = - Ph/8 - (EJ/h)(-7/(3EJ)) = - 0,417 тм. Окончательный вид эпюры М представлен на рис. 13,а. б) 3,33 a) 2,44 3,33 А А 1 М,тм 0,417 0,167 7 3,56т в) 1,875 - + 1 3,56 С С 1,875 - Q,т Q,т В В 0,125 2,44 1 г) А 1 NA1 - 1,875 1,875т + N,т N1C В 2,44 Рис.13 Эпюру поперечных сил (рис. 13,б) строим по формуле Q = Q6 +(Мпр–Млев)/ считая каждый стержень шарнирно опертой по концам балкой, загруженной внешней нагрузкой и концевыми моментами Мпр и Млев (см. эпюру М рис. 13,а). Стержень А -1: QA = q /2 + (M1 - MA )/ = 1*6/2 + (-3,33) - 0)/6 = 2,44 т, Q1 = -q /2 + (M1 - MA)/ = -1*6/2 + ((-3,33) - 0)/6 = -3,56 т. Стержень В - С: QB =QC = (МC - МB)/(h/2) = ((-0,417) - 0,167)/2 = -0,125 т. Стержень C-l: QC=Q1 =(M1 -МC)/(h/2) = (3,33 - (-0,417))/2 = 1,875 т. Эпюру N (рис. 13,г) строим определив продольные силы в стержнях из условий равновесия узла 1 (рис. 13,в) в виде ΣХ = 0, ΣY = 0 . 7. Правильность проведенного расчета подтверждается равновесием узла 1 под действием изгибающих моментов в стержнях (см. эпюру М на рис.13,а). Пример 2. Для рамы, изображенной на рис. 14,а построить эпюры М, Q, N. При вычислениях принять = 6 м, h = 4 м, q = 1 т/м, Р = 2 т, J1 = 2J2. 1. Определим степень кинематической неопределимости рамы m. Так как жестких узлов рамы два (узлы 1 и 2), то mу = 2. Число линейных перемещений определяем как степень изменяемости (число недостающих связей) шарнирно-стержневой системы, полученной врезанием полных шарниров во - 18 - все жесткие узлы рамы, включая опорные (рис. 14,б), а именно, mл = 1, Окончательно m = my +mл = 2 + 1 = 3. б) P a) А 1 В ℓ/2 C ℓ/2 2 ℓ В В 2 г) P А 1 2 D D в) А 1 h q P А 1 В q Z2 P D Z1 C D 2 Z3 Рис.14 2. Основную систему выбираем, исключая угловые и линейные перемещения узлов 1 и 2 рамы. Для этого в узлы 1 и 2 введем жесткие заделки, запрещая поворот узлов, а в точку 2 поставим вертикально силовую связь шарнирно-подвижную опору, запрещая вертикальные перемещения узлов 1 и 2 (рис. 14,в). Принимая в качестве лишних неизвестных углы поворота Z1 и Z2 узлов 1 и 2 и вертикальное перемещение Z3 узлов я прикладывал внешнюю нагрузку, получаем эквивалентную систему (рис. 14,г). Система канонических уравнений в данном случае имеет вид r11Z1 + r12Z2 + r13Z3 + R1F = 0, r21Z1 + r22Z2 + r23Z3 + R2F = 0, r31Z1 + r32Z2 + r33Z3 + R3F = 0, 3. Строим единичные М 1 , М 2 и М 3 и грузовую МF эпюры изгибающих моментов. При построении единичных эпюр М J предварительно изображаем положение осей изогнутых стержней (штриховые линии на рис. 15,а,б,в) от единичных лишних неизвестных ZJ, что позволяет установить положение растянутых волокон в стержнях. Для построения эпюры M 1 задаем единичный поворот заделке в узле 1 в направлении Z1. При этом изгибаются стержни А-1 и 1-2, жестко соединенные в этом узле (рис. 15,а). Эпюру M 1 на стержнях А-1 и 1-2 строим используя таблицу 3 как для балки, защемленной по обоим концам при повороте заделки в узле 1 на угол φ = Z1 = 1 (рис. 15,а). На стержнях В-2 и 2-Д изгибающие моменты отсутствуют. Для построения эпюры M 2 задаем единичный поворот заделке в узле 2 в направлении Z2. При этом изгибаются стержни В-2, 1-2 и 2-Д, жестко со- 19 - a) А 2EJ1 1 4EJ 2 h 1 в) В + 6EJ1 2 1 2 6EJ1 2 1 А 2EJ 2 h 1 6EJ1 2 1 1 1 6EJ1 2 1 1 б) M1 2 В А - 4EJ1 1 Z1=1 Z3=1 2EJ1 1 г) А M3 ∆=1 D 3EJ1 2 1 В D 2EJ 2 h 1 1 4EJ1 1 M2 + 2 4EJ 2 h 1 + D 3EJ1 1 Z2=1 P 1 P q 2 P 8 8 8 P 1 1 1 - C В + 2 P 8 1 МF q D + Рис.15 единенные в этом узле (рис. 15,б). Эпюру M 2 на стержнях В-2 и 1-2 строим используя таблицу 3 как для балки, защемленной по обоим концам, а на стержне 2-Д как на балке, защемленной на одном и шарнирно опертой на другом конце, при повороте заделки в узле 2 на угол φ = Z2 = 1 (рис. 15,б). На стержне А-1 изгибающие моменты отсутствуют. Для построения эпюры M 3 задаем единичное перемещение введенной опоре в узле 2 в направлении Z3. При этом за счет смещения стержня 1-2 изгибаются стержни А-1, В-2 и 2-Д (рис. 15,в). Эпюру M 3 не стержнях А-1 и В-2 строим как для балки, защемленной по обоим концам при смещении заделки в узле 1 и в узле 2 на величину ∆ = Z3 = 1 (рис. 15,в ), а на стержне 2-Д как на балке, защемленной на одном и шарнирно опертой на другом конце при смещении заделки в узле 2 используя таблицу 3. На стержне 1-2 при этом изгибающие моменты отсутствуют, Эпюра МF (рис. 15,г) в основной системе на незагруженных стержнях А-1 и 1-2 отсутствует, yа стержне В-2 загруженном сосредоточенной силой посередине строим по таблице 3 как для балки, защемленной по обоим концам. Величины моментов по концам ригеля вычисляем по таблице 3, учитывая, что в данном случае v = u = 1/2 , MF1 = 1/2 (1/2)2P = P /8, аналогично MF2 = P /8. Момент под силой МFC = 2(1/2)2 (1/2)2Р = Р /8. На стержне 2Д, загруженном равномерно распределенной нагрузкой, эпюру MF строим как на балке, защемленной на одном и шарнирно опертой на другом конце. При этом момент в заделке равен q 2 /8. 4. Определяем единичные и грузовые коэффициенты статическим методом. - 20 - r11 - реакция в первой введенной связи (момент в заделке 1) от поворота узла 1 на угол φ = Z1 = 1 определяется из условия равновесия узла 1 в. первом единичном состоянии (рис. 15,а). Для этого вырезаем узел 1 в первом единичном состоянии, прикладываем к заделке искомую реакцию r11 в направлении Z1, а к перерезанным стержням прикладываем изгибающие моменты (рис. 16,а), величину и направление которых берем с эпюры M 1 (рис. 15,а). Из условия равновесия узла 1 (рис. 16,а) в виде Σmom1 = 0, находим r11 = 4EJ1/ + 4EJ2 /h = 7EJ/3. Р а) в) б) г) 1 1 1 r11 r12 1 r 13 4EJ1 4EJ 2 h 2EJ 2 h 6EJ1 2 R1F Рис.16 Здесь и далее в примере J = J2. r12 - реакция в первой введенной связи (момент в заделке 1) от поворота узла 2 на угол φ = Z2 = 1 определяется из условия равновесия узла 1 во втором единичном состоянии (рис. 15,б). Вырезаем, узел 1 во втором единичном состоянии, прикладываем к заделке искомую реакцию r12 в направлении Z1, а к перерезанным стержням изгибающие моменты (рис. 16,б), величину и направление которых берем с эпюры M 2 (рис. 15,б). Из условия равновесия узла, 1 (рис. 16,б) в виде Σmom1=0, находим r12 = 2EJ2/h = EJ/2. r13 - реакция в первой введенной связи (момент в заделке 1) от смещения узла 1 на величину ∆ = Z3 = 1 определяется из условия равновесия узла 1 в третьем единичном состоянии (рис. 15,в). Вырезаем узел 1 в третьем единичном состоянии, прикладываем к заделке искомую реакцию r13 в направлении Z1, а к перерезанным стержням изгибающие моменты (рис. 16,в), величину и направление которых, берем с эпюры M 3 (рис. 15,в). Из условия равновесия узла 1 (рис. 16,в) в виде Σmom1=0, находим r13 = 6EJ1/ 2 = EJ/3. R1F - реакция в первой введенной связи (момент в заделке 1) от внешней нагрузки определяется, из условия равновесия узла 1 в грузовом состоянии (рис. 15,г). Вырезаем узел 1 в грузовом состоянии, прикладываем к заделке искомую реакцию R1F в направлении Z1, а к перерезанным стержням изгибающие моменты (рис. 16,г), величину которых берем с эпюры МF (рис. 15,г). Из условия равновесия узла 1 (рис. 16,г) в виде Σmom1 = 0, находим R1F=0. Коэффициенты второго уравнения r21, r22, r23 и R2F представляют собой реакции во второй введенной связи (момент в заделке 2) от поворота узла 1 на угол φ = Z1 = 1, поворота узла 2 на угол φ = Z2 = 1, вертикального смещения средней части рамы на величину ∆ = Z3 = 1 и внешней нагрузки, соответственно. Для их определения вырезаем узел 2, прикладываем к заделке, искомую реакцию r21, r22, r23 или R2F направлении Z2, а к перерезанным стержням изгибающие моменты (рис. 17,а,б,в,г), величину и направление которых берем с эпюры М 1 , М 2 , М 3 или МF, соответственно (см. рис. 15,а,б,в,г). Составляем условия равновесия узла 2 в единичных (рис. 17,а,б,в) и грузовом - 21 - а) 2EJ 2 h 2 2 4EJ1 r21 4EJ 2 h б) в) 2 3EJ1 r22 г) r23 6EJ1 2 3EJ1 2 R2F 2 q 2 8 P 8 Рис.17 (рис. 17,г) состояниях в виде Σmom2 = 0 и, решая полученные уравнения, находим r21 = 2EJ2/h = EJ/2 = r12 r22 = 4EJ1/ +3EJ1/ + 4EJ2/h = 10EJ/3. r23 = 6ЕJ1/ 2 -3EJ1/ 2 = EJ/6. R2F = Р /8 - q 2 /8 = -3 тм. r31 -реакция в третьей введенной связи (усилие в вертикальной шарнирноподвижной опоре) от поворота узла 1 на угол φ = Z1 = 1 определяется из условия равновесия средней частя рамы в первом единичном состоянии (рис.15,а). Вырезаем среднюю часть рамы в первом единичном состоянии, прикладываем к введенной опоре искомое усилие r31 в направлении Z3, а к перерезанным стержням поперечные силы (рис. 18,а), возникающие в них б) a) 6EJ1 2 в) 1 1 2 r31 6EJ1 2 2 3EJ1 2 г) 12EJ 1 3 1 12EJ 1 3 2 r33 r32 P 3EJ1 3 1 P 2 5q 8 2 R3F Рис.18 при повороте узла 1, величину и направление которых определяем по эпюре М 1 (рис. 15,а) или по таблице 3. Из условия равновесия средней части рамы (рис. 18,а) в виде суммы проекций всех сил на вертикаль (ΣY = 0) находим r31 = 6EJ1/ 2 = EJ/3=r13. Аналогично, остальные коэффициенты третьего уравнения r32, r33 и R3F также представляют собой реакции в третьей введенной связи (усилия в вертикальной шарнирно-подвижной опоре в узле 2) от поворота узла 2 на угол φ= Z2 = 1, от вертикального смещения средней части рамы на величину ∆=Z3= 1 и от внешней нагрузки, соответственно. Для их определения вырезаем среднюю часть рамы, прикладываем к опоре искомую реакцию r32, r33 или R3F в направлении Z3, а к перерезанным стержням поперечные силы (рис.18,б,в,г), величину и направление которых определяем по эпюрам М 2 , М 3 или MF (рис. 15,б,в,г) соответственно, или берем из таблицы 3. Составляем условия равновесия средней части рамы в единичных (рис. 18,б,в) и гру- 22 - зовом (рис. 18,г) состояниях в виде Σ Y = 0 и, решая полученные уравнения, находим r32 =6EJ1/ 2 - 3EJ1/ 2 = EJ/6= r32, r33 = 12EJ1/ 3 + 12EJ1/ 3 + 3EJ1/ 3 = EJ/ 4, R3F = P + P/2 + 5q /8 = 27/4 т. 5. Найденные значения единичных и грузовых коэффициентов после некоторых преобразований позволяют записать систему канонических уравнении в виде 14EJZ1 + 3EJZ2 + 2EJZ3 = 0, 3EJZ1 + 20EJZ2 + EJZ3 + 18 = 0, 4EJZ1 + 2EJZ2 + 3EJZ3 + 81 =0, решая которую определяем углы поворота Z1 и Z2 узлов 1 и 2 и вертикальное перемещение Z3 узлов: Z1 = 4,48/EJ (рад), Z2 = 1,94/ЕJ (рад), Z3 = -34,27/EJ (м) 6. Окончательную эпюру изгибающих моментов в стержнях рамы (рис.19,а) строим согласно выражению М = MF + Z1 М 1 + Z2 М 2 + Z3 М 3 . a) 8,45 2,32 б) 2,32 А 1 - 2 + 0,85 2,4 Q,т 4,16 С В 1 М,тм 11,63 - + А 5,45 + - 7,33 4,18 2,16 + + D В С 2,48 2 2,4 D 3,52 3,15 Рис.19 Стержень А-1: МА = 0 + Z12EJ1/ + 0 + Z36EJ1/ 2 = 4,48*2*2/6 + (-34,27)6*2/36 = -8.45 тм M1 = 0 – Z14EJ1/ + 0 + Z36EJ1/ 2 = - 4,48*4*2/6 - (-34,27)6*2/36 = 5,45 тм Стержень 2-1: M1 = 0 – Z14EJ2/h - Z22EJ2/h + 0 = - 4,48*4*4/4 - 1,94*2/4 = -5,45 тм M2 = 0 + Z12EJ2/h + Z24EJ2/h + 0 = 4,48 *2/4 +1,94 *4/4 = 4,18 тм Стержень В-2: МВ = -Р /8 + 0 + Z2 2EJ1/ + Z36EJ1/ 2 = = -2*6/8+1,94*2*2/6 + (-34,27)*6*2/36 = -11,63 тм МС = Р /8 + 0 - Z2 EJ1/ + 0 = 2*6/8 - 1,94*2/6 = 0,85 тм М2 = - Р /8 + 0 – Z24EJ1/ - Z3 6EJ1/ 2 = = -2*6/8 - 1 94*4*2/6 - (-34,27)6*2/36 = 7,33 тм Стержень 2-D: MD = 0, M2 = -q 2 /8 + 0 + Z2 3EJ1/ -Z3* 3EJ1/ 2 = = -1*36/8 + 1,94*3*2/6 - (-34,27)6*2/36 = 3,15 тм Эпюру поперечных сил Q (рис. 19,б) в стержнях рамы строим согласно выражению Q = Qб + (Mпp - Млев)/ , считая каждый стержень шарнирноопертой по концам балкой, под действием внешней нагрузки и концевых моментов Мпр и Млев. - 23 - Стержень А -1: QА = Q1 = Q6А1 + (M1 – MА)/ = 0 + (5,45 - (-8,45))/6 = 2,32 т Стержень 1-2: Q1 =Q2 = Q612 + (M1 - M2)/h = 0 + (-5,45 - 4,18)/4 = -2,4 т Стержень В - С: QВ=QС =Q6ВС+(MС – МВ)/( /2) = 0 + (0,86 - (-11,63))/3 = 4,16 т Стержень С - 2: QС = Q2 = Q6C2 + (M2 – МС)/( /2) = 0 + (7,33 - 0,85)/3 =2,16 т Стержень 2 - D: Q2 =Q62 + (MD – M2)/ = q /2 + (0 - 3,15)/6 = 2,48 т QD = Q6D + (MD - M2)/ = - q /2 + (0 - 3,15)/6 = -3,52 т Величину продольных сил N в стержнях определяем из условий равновесия узлов рамы в виде суммы проекций всех сил, действующих на узел, на два взаимно перпендикулярных направления. Записывая условия равновесия узла 1 (рис. 20,а) в виде Σ X = 0, Σ Y = 0 и решая полученные уравнения находим продольные силы в стержне A - 1, NА1 = 2,4 т и в стержне 1-2, 2,32т a) б) P=2т N2D NA1 3,52 2,4т N12 в) 2,4т г) 2,4 А N12 2,16т N2B D 1 1 0,32 N,т + N2D 2 2,4 + 0,32 В 2 D 2,48т 2,4 2,4 Рис.20 N12 =0,32 т. Рассматривая условия равновесия узла D (рис. 20,б) видим, что N2D = 0, записывай затем условие равновесия узла 2 (рис. 20,в) в виде ΣХ = 0 находим продольную силу в стержне 2 - В N2В = 2,4 т. Окончательная эпюра продольных сил N представлена на рис. 20,г. Достаточной проверкой правильности выполненных расчетов являются статические проверки, представляющие собой выполнение условий равновесия узлов 1 и 2 (рис. 21,а,б), отдельных частей рамы и всей рамы в целом (рис. 22). Кинематический способ проверки правильности расчета состоит в вычислении перемещения некоторой точки, величина которого заранее известна. Так например, любое перемещение точки А и вертикальное перемещение точки D в заданной системе (рис. 14,а) равно нулю. Образуем статически определимую систему устранением всех лишних связей, в том числе и в т. А и - 24 - а) 2,32т 5,45тм 2,4т б) Р=2т 0,32т 2,4т 1 4,18тм 2,16т 5,45тм 2,4т 2,48т 2 2,4т 0,32т 3,15тм 7,33тм Рис.21 2,32т Р=2т А Х1 1 2,4т Х3 8,45тм 4,16т Р=2т Х2 h=4м В Р=2т q=1т/м Р=2т q=1т/м D С 2,4т 11,63тм ℓ/2 2 3,52т ℓ/2 Х4 ℓ=6м Рис.22 Рис.23 т. D (рис. 23), и заменив их найденными реакциями Xj, получим систему, эквивалентную заданной (рис. 23). Определим сумму перемещений точки А и точки D с помощью интеграла Мора ∆ = М М dz / EJ , где М - эпюра изгибающих моментов в заданной системе от заданной нагрузки (рис. 24,а), 5 a) 8,45 б) Х2=1 А 5,45 + - С В 0,85 ℓ/2 + М,тм 11,63 2 + 7,33 ℓ/2 - Х1=1 1 - 5 1 Х3=1 + 4,18 + М h 1 D + 3,15 ℓ 7 7 6 Х4=1 Рис.24 M - эпюра изгибающих моментов в статически определимой системе от одновременного действия единичных реакций отброшенных связей (лишних неизвестных) Xj = 1 (рис. 24,б). Вычисляя интеграл Мора, например, по правилу Верещагина (перемножением эпюры М, рис. 24,а и эпюры M , рис.24,б) получим - 25 - ∆ = М М dz / EJ = (0,5*8,45*6*(5/3 - 1*2/3) + 0,5*5,45*6*(l/3 - 5*2/3) + +0,5*(0.85 - 11,63 )*3*7 + 0,5*(0,85 + 7,33)*3*7 + 0,5*3,15*6*6*2/3 + +(2/3)(1*36/8)*6*0,5*6)/EJ1 + (0,5*4,18*4*(l*2/3 + 5/3)- 0,5*5,45*4(5*2/3+ +1/3))/EJ2 = (20,4 - 20,46)/EJ = -0,06/EJ Погрешность вычислений равна (0,06/20,4)*100% = 0,3% что, подтверждает правильность выполненных расчетов. При определении угловых и линейных перемещений сечения в любой точке К рамы можно воспользоваться интегралом Мора ∆ = MM K *dz / EJ , где М – эпюра изгибающих моментов в заданной системе от заданной нагрузки, МК* – эпюра изгибающих моментов в статически определимой системе, полученной из заданной устранением все лишних связей, от действия приложенных в точку К единичного сосредоточенного момента (при вычисления угла поворота) или единичной сосредоточенной силы (при вычислении линейного перемещения). Для определения угла поворота сечения С вычислим интеграл Мора, например, но правилу Верещагина (перемножением эпюры М, рис. 25,а и эпюры МС* от единичного сосредоточенного момента, рис. 25,б) φС = MM K*dz/EJ = (0,5(0,85 - 11,63)*3*1/EJ1 = -16,17/ EJ1. б) a) 8,45 А МС* 1 - 5,45 + - 1 М,тм 11,63 С В 0,85 ℓ/2 2 + 7,33 ℓ/2 h 4,18 + в) 1 1 D МС* /2 3 1 3,15 ℓ 1 Рис.25 Отрицательная величина φС означает, что сечение С от заданной нагрузки поворачивается в направлении, противоположном приложенному единичному моменту. Для определения вертикального перемещения сечения С вычислим интеграл Мора, например, по правилу Верещагина (перемножением эпюры М, рис. 25,а и эпюры МС* от единичной вертикальной силы, рис. 25,в) ∆С = MM C*dz/EJ = 0,5(11,63*3*3*2/3 - 0,85*3*3*1/3) /EJ1 = 33,615/ EJ1. Положительное значение ∆С означает, что сечение С от заданной нагрузки перемещается в направлении приложенной единичной силы, т.е. вниз. - 26 - БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Строительная механика. Учебник для ВУЗов под ред. Даркова А.В, М.: Высшая школа, 1976.- 600 с. 2. Дарков А.В., Шапошников Н.Н. Строительная механика. Учебн. для строит. спец. вузов,- М.: Высш. шк., 1986.- 607 с. 3. Руководство к практическим занятиям по курсу строительной механики (статика стержневых систем). Учебное пособие под ред. Клейна Г.К.- М: Высш. шк., 1980.- 384 с. - 27 - СОДЕРЖАНИЕ Стр. 1. ВВЕДЕНИЕ. СОДЕРЖАНИЕ РАБОТЫ И ИСХОДНЫЕ ДАННЫЕ 2. ВЫБОР НЕИЗВЕСТНЫХ 3. СТЕПЕНЬ КИНЕМАТИЧЕСКОЙ НЕОПРЕДЕЛИМОСТИ 4. ВЫБОР ОСНОВНОЙ СИСТЕМЫ 5. КАНОНИЧЕСКИЕ УРАВНЕНИЯ МЕТОДА ПЕРЕМЕЩЕНИЙ 6. СТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ЕДИНИЧНЫХ И ГРУЗОВЫХ КОЭФФИЦИЕНТОВ 7. ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ БИБЛИОГРАФИЧЕСКИЙ СПИСОК - 28 - 3 8 9 10 11 12 16 27