ЛЕКЦИЯ 3 ЗАКОНЫ СОХРАНЕНИЯ 3.1. Работа 3.3. Мощность 3
реклама

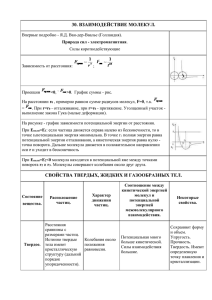
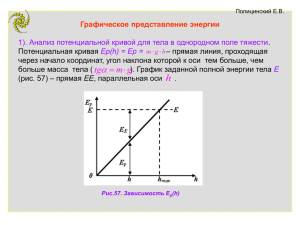
ЛЕКЦИЯ 3 ЗАКОНЫ СОХРАНЕНИЯ 3.1. Работа 3.3. Мощность 3.3. Энергия. Закон сохранения энергии 3.4. Кинетическая энергия 3.5. Потенциальная энергия в поле тяготения 3.6. Потенциальная энергия упругой деформации 3.7. Графическое представление энергии 3.8. Признак потенциальности поля. Консервативные силы. Диссипативные силы 3.9. Связь между консервативной силой и потенциальной энергией 1. Работа. Пусть тело движется прямолинейно под действием постоянной силы F и совершает прямолинейное перемещение S (рис.3.1). Рис.3.1 Рис.3.2 Тогда по определению работой силы будет называться скалярное произведение этих векторов: A F S F S cos , (3.1) 0 где α – угол между векторами. (При α>90 работа ΔA<0.) Размерность работы A Н м Дж . Если сила непостоянна и/или траектория криволинейна, тогда разбиваем d S траекторию на почти прямолинейные участки (элементарные перемещения) , такие малые, что на каждом F const (рис.3.2). Тогда работу на каждом участке можно рассчитать по определению (3.1), а потом сложить (проинтегрировать) от начальной точки 1 до конечной 2: dA F dS F dS cos FS dS ; (3.2) 2 2 2 2 A12 dA F dS F cos dS FS dS . (3.3) 1 1 1 1 1 Если известна зависимость касательной составляющей силы FS f (S ) , то работу можно представить графически как площадь под графиком в соответствующих пределах (рис.3.10). Рис.3.4 Рис.3.3 2. Мощность. Мощность – быстрота совершения работы. Средняя мощность – работа за единицу времени: A . (3.3) Pср. t Дж Размерность P Вт (Ватт). Мгновенная мощность: с dA . (3.4) P dt Из (3.4): dA P dt 2 t2 1 t1 A12 dA P dt , Откуда также следует графическое представление (рис.3.4). Ещё одно полезное соотношение для мощности: dA F dS dS (3.5) P F F v. dt dt dt 3. Энергия. Закон сохранения энергии. Энергия – мера взаимодействия и движения всех видов материи. Энергия характеризует состояние тела (системы). Энергия – функция состояния, то есть однозначно определяется состоянием системы. Изменить энергию системы можно, совершив над системой работу. Введём энергию как физическую величину, изменение которой равно работе внешних сил над системой (Для энергии можно использовать обозначение E или W .): W W2 W1 Aвнешн.сил ; (3.6) или: W1 W2 A , (3.7) 2 где A Aвнешн.сил – работа системы против внешних сил. В этих соотношениях W – полная энергия системы, то есть сумма всех видов энергии. Размерность энергии совпадает с размерностью работы: W A Дж . Соотношения (3.6) и (3.34) дают закон сохранения энергии: полная энергия замкнутой системы сохраняется (над замкнутой системой не совершается работа: внешних сил нет). Выражение (3.33) даёт только изменение энергии – важно только это в реальных процессах; начало отсчёта энергии можно задавать произвольно. Механическая энергия Кинетическая (энергия движения) Потенциальная (энергия взаимодействия; положения, поскольку величина взаимодействия зависит от положения тел) 4. Кинетическая энергия. Пусть под действием внешней силы F скорость тела изменяется от v1 до v 2 . Найдём работу силы; она даст изменение кинетической энергии: 2 2 2 dv W W2 W1 Aвнешн.сил F dS ma dS m dS dt 1 1 1 2 2 2 mv dS v m v m dv mv dv dt 2 2 1 v 2 2 1 1 Отсюда можно сделать вывод, что кинетическая энергия Wкин. удобно положить, что const 0 ; тогда окончательно m v2 Wкин. . 2 5. m v2 const ; 2 (3.8) Потенциальная энергия в поле тяготения. а) Однородное поле. Поднимаем тело вверх в однородном гравитационном поле (рис.3.5); работа идёт на увеличение потенциальной энергии: 2 2 W W2 W1 Aвнешн.сил F dS F dS 1 2 h2 1 h1 1 F dS mg dh mg h2 h1 ; откуда потенциальная энергия Wпот. mgh . Рис.3.5 3 (3.9) Рассмотрим свободное падение тела без начальной скорости. Система Землятело замкнута. Полная начальная энергия тела на высоте h равна потенциальной (скорость отсутствует): W1 mgh . При подлёте к Земле тело набрало скорость, которую можно рассчитать из формулы пути при равноускоренном движении: v 2 v 02 S v 2 2aS 2 gh . 2a Кинетическая (и полная тоже) энергия в конце полёта m v 2 m 2 gh W2 2 gh . 2 2 Полная энергия сохраняется. Рис.3.6 б) Центральное поле тяготения Найдём работу в центральном поле тяготения и получим выражение для потенциальной энергии. Тело массой m перемещается в центральном поле, созданном массой M из положения 1 в положение 3. Внешняя сила F совершает работу, которая идёт на увеличение только потенциальной энергии при условии, что скорость (кинетическая энергия) остаётся неизменной. Поэтому перемещение происходит очень медленно, без ускорения; так что в любой точке траектории F Fòÿã . . 2 r2 W W2 W1 Aгравит.сил Aвнешн.сил F dS F dr F dr 2 1 1 r1 M m M m 2 M m M m dr 2 r r r r r1 r1 2 1 Отсюда можно сделать следующие выводы: 1. Сравнивая начало и конец цепочки равенств, получим выражение для потенциальной энергии гравитационного взаимодействия точечных масс: r2 r Wпот. M m . r (3.10) Начало отсчёта энергии задаётся из соображений, что при r массы не взаимодействуют, и W 0 . 4 3. Работа сил гравитационного поля не зависит от траектории, а только от начального и конечного положения точки. Такие поля называются потенциальными. 3. Введём понятие потенциала гравитационного поля: Потенциал поля численно равен потенциальной энергии единичной массы, помещённой в данную точку поля: Wпот. . m (3.11) Потенциал – энергетическая скалярная характеристика поля. Его размерность Дж . Из (3.10) и (3.11) получим потенциал поля, созданного точечной массой кг M на расстоянии r: 6. M . r (3.12) Потенциальная энергия упругой деформации. Рис.3.7 Fв неш. Fупр. kx x Aвнешн.сил x kx2 Fвнеш.dx kx dx 0 Wпот. Wпот. 0 2 0 0 Итак, Wпот. kx2 . 2 (3.13) 7. Графическое представление энергии. На рисунках 3.8 и 3.9 дано графическое представление потенциальной энергии в однородном поле силы тяжести и энергии упругой деформации соответственно. Полная энергия в замкнутой системе остаётся постоянной: Wполная Wпот. Wкин. , то есть 2 kxmax kx2 Wкин. 2 2 mghmax mgh Wкин. ; 5 Рис.3.8 Рис.3.9 8. Признак потенциальности поля. Консервативные силы. Диссипативные силы. Сила называется консервативной, если её работа не зависит от траектории, а только от начального и конечного положения тела. Поле таких сил называется потенциальным. Примеры: гравитационное поле; поле упругих сил. Если работа силы зависит от траектории, то силы называются диссипативными, а поле таких сил – непотенциальным. Примеры: силы трения; силы вязкости; силы неупругой деформации. При наличии диссипативных сил механическая энергия необратимо превращается в другие виды, например, в тепловую. Закон сохранения (изменения) механической энергии системы при её переходе из состояния 1 в состояние 2 в этом случае можно записать так: (3.14) W1мех. W2 мех. Aпротив Aпротив . диссипативных сил внешних сил В замкнутой системе механическая энергия сохраняется, если нет диссипативных сил, только консервативные. 9. Связь между консервативной силой и потенциальной энергией. Система совершает работу за счёт уменьшения своей потенциальной энергии: dA dWпот. (3.15) По определению: dA F dr . (3.16) Тогда F dr dWпот. Отсюда можно выразить силу: F gradWпот. . (3.17) 6 Здесь градиент – это вектор, компоненты которого равны производным по соответствующим координатам: Wпот. Wпот. Wпот. gradWпот. i j k ; x y z i , j и k – единичные векторы, направленные по соответствующим осям: i j k 1 (см. рис.3.10). В проекции на ось OX: Fx Wпот. . x (3.18) Пример: dWпот. kx 2 Wпот. Fупр. kx . 2 dx В равновесном положении сила равна нулю: dWпот. F 0 0, Рис.3.10 dx энергия принимает экстремальные значения. В случае минимума равновесие устойчиво: при небольших отклонениях от равновесия возникают силы, возвращающие тело к положению равновесия; в случае максимума – неустойчиво: при отклонениях от равновесного состояния возникают силы, направленные от равновесного положения (рис. 3.11). Рис.3.11 7