МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Державний вищий навчальний заклад
«Прикарпатський національний університет імені Василя
Стефаника»
О.Г.Малько
ТЕОРІЯ СИСТЕМ
НАВЧАЛЬНИЙ ПОСІБНИК
Для напрям підготовки 126 «Інформаційні системи та
технології»,
Івано-Франківськ
2018
МВ 02070855 – 3433 – 2010
Малько О.Г. Теорія систем, навчальний посібник, .
Івано-Франківськ: ІФНТУНГ, 2010. – 233 с.
Навчальний посібник містить короткі теоретичні основи,
приклади розв’язку типових задач, контрольні питання та
варіанти типових завдань до практичних занять з додаткових
розділів математики у аспекті теорії систем. Формування завдань
базується на основних поняттях теорії систем, типових
системотехнічних прийомах формалізації функціонування
процесів і найбільш розповсюджених сучасних методах якісного
та кількісного синтезу і аналізу систем.
Рецензент:
канд. техн. наук, доцент кафедри
“Комп’ютерних технологій в системах управління та автоматики”
Незамай Б. С.
2
ЗМІСТ
ВСТУП .......................................................................................... 5
1 ОСНОВНІ ПОНЯТТЯ ТЕОРІЇ СИСТЕМ .......................... 6
1.1 Поняття і визначення .......................................................... 6
1.2 Характеристики систем ...................................................... 7
1.3 Поняття керування системою............................................ 8
1.4 Класифікація (таксономія) представлення систем ....... 9
1.5 Контрольні запитання ....................................................... 12
1.6 Перелік джерел.................................................................... 12
2 ДИНАМІЧНІ СИСТЕМИ ПЕРШОГО ПОРЯДКУ ........ 13
2.1 Приклади систем першого порядку ............................... 13
2.2 Стан системи і його властивості ..................................... 19
2.3 Лінійність систем ................................................................ 23
2.4 Лінеаризація нелінійних систем ...................................... 25
2.5 Стаціонарність систем ....................................................... 29
2.6 Розв’язок рівняння стану лінійних систем першого
порядку у стандартній формі ........................................................ 33
2.7 Поняття стійкості динамічних систем першого
порядку .............................................................................................. 35
2.8 Контрольні запитання ....................................................... 40
2.9 Варіанти завдань до практичних занять ....................... 41
3 ДОДАТКОВІ РОЗДІЛИ ТЕОРІЇ МАТРИЦЬ .................. 50
3.1 Базові поняття та визначення теорії матриць ............ 50
3.2 Матриці і операції над ними ............................................ 50
3
3.3 Лінійний векторний простір ............................................ 55
3.4 Розмірність і базис векторного простору ...................... 61
3.5 Лінійні перетворення ......................................................... 61
3.6 Власні вектори і власні значення.................................... 62
3.7 Приведення матриці до діагонального вигляду .......... 68
3.8 Теорема Келі-Гамільтона і функції квадратних
матриць .............................................................................................. 71
3.9 Випадок кратних власних значень ................................. 76
3.10 Норма лінійного перетворення (норма матриці) ....... 88
3.11 Контрольны питання ...................................................... 89
3.12 Варіанти завдань до практичних занять ..................... 89
4 СИСТЕМИ ВИСОКОГО ПОРЯДКУ ................................ 97
4.1 Поняття простору станів .................................................. 97
4.2 Лінеаризація систем високого порядку ....................... 105
4.3 Розв’язок рівняння стану високого порядку. ............. 107
4.4 Перетворення змінних стану .......................................... 111
4.5 Системи з дискретним часом ......................................... 113
4.6 Контрольны питання ...................................................... 118
4.7 Варіанти завдань до практичних занять ..................... 119
РЕКОМЕНДОВАНА ЛІТЕРАТУРА................................... 136
4
ВСТУП
Сучасна тенденція науково-технічного розвитку як у сфері
виробництва так і в управлінні вимагає розширення сфери
практичного
застосування
математичних
методів,
інтенсифікується процес "математизації наук". При цьому
надзвичайно важливу роль грають "системний підхід",
"системний аналіз" і інші напрями наукової і інженерної думки,
які пов'язані з поняттям системи як математичній моделі, що
використовується для формального опису різноманітних
реальних об'єктів і процесів.
І хоча новітні дослідження пов'язані з поняттям динамічної
системи в широкому сенсі (що включає об'єкти, які описуються
загальними, як правило, стохастичними функціональними
співвідношеннями), класичні динамічні системи, що виникли в
надрах якісної теорії звичайних диференціальних рівнянь,
продовжують залишатися основним інструментом розвязку
багатьох практичних завдань. Це пояснюється, по-перше,
наявністю розвиненого аналітичного апарату і чисельних методів
розв’язку звичайних диференціальних рівнянь; по-друге,
наявністю загальнодоступних якісних методів дослідження,
зокрема методів оцінки стійкості, аналізу поведінки розв’язків в
околі особливих точок і їх асимптотичної поведінки та ін., і, потретє, прозорістю і природністю звичайного диференціального
рівняння як математичній моделі для опису процесів переходу
реальних об'єктів з одного стану в інший під дією зовнішніх і
внутрішніх причин.
1 ОСНОВНІ ПОНЯТТЯ ТЕОРІЇ СИСТЕМ
1.1 Поняття і визначення
Все що нас оточує і все те що ми використовуємо у своїй
діяльності в тій чи іншій мірі можна розглядати як систему.
Використовуючи систему, ми як правило не задумуємося про її
системні властивості хоч і користуємося ними на основі
накопиченого досвіду (емпірико-інтуїтивний підхід).
В залежності від широти представлення можна навести
декілька визначень системи, які доповнюють одне одного.
Найбільш загальне: Система це сукупність об’єктів на які
накладені зв’язки. Причому під поняттям зв’язок розуміються
такі терміни як: взаємне розташування об’єктів, організація,
сполучення, взаємодія, кількісне співвідношення та. ін.
Більш конкретне: Система – це об’єкт будь-якої природи чи
сукупність об’єктів довільної, в тому числі і різної природи,
який володіє вираженою системною властивістю, тобто
властивістю, якою не володіє ні одна з частин системи при
будь-якому способі поділу, і яка не виводиться з властивостей
частин. Найбільш важливим наслідком цього визначення є те,
що властивість системи формується в процесі певної організації її
складових їх взаємодії, тобто вона залежить як від складових
системи так і накладених на них зв’язків.
Наглядними
прикладами
формування
системних
властивостей є такі системи як слово, число, речення.
Дійсно, слово складається з букв, які є символами, що
відображають звуки. Слово ж володіє семантичною (змістовною)
властивістю, яка формується шляхом організації букв певним
чином. Так з одних і тих-же елементів (букв) за рахунок
накладання зв’язків (розташуванні у слові) можна сформувати
різні системи (слова). Слід вважати що система може складатися
з одного елемента, однак властивості системи і елемента можуть
бути різні. Так такі слова як „я”, „і”, „а” і т. п. по позначенню
співпадають з відповідними буквами, однак не слід їх путати з
буквами, властивості у них різні.
У прийнятій порядковій системі числення властивість числа
(його кількісний еквівалент) залежить від порядку розташування
(зв’язків) цифр (елементів системи). Не слід плутати поняття
цифра і число (аналогічно з буквою і словом), так як вони
володіють зовсім іншими властивостями. Так цифра (0, 1, 2, ..., 9)
6
є символ для представлення чисел, тому число „8” і цифра „8”
хоч і співпадають по запису мають зовсім інші властивості. Тому
беззмістовними є висловлювання типу ”сума двох цифр ...” і т.
п., хоч, нажаль, це часто зустрічається навіть у авторитетних
виданнях.
Аналогічно можна сформувати системні властивості речення,
параграфу, глави (розділу), статті, книги.
Прикладами формування властивості інших систем:
- властивості фізичних елементів таблиці Мендєлєєва різні за
рахунок організації одних і тих же нуклонів у ядрі атома;
- властивості вуглеводів, так бензини, гас, спирти, пластики і
т. п. мають однаковий елементний склад, однак, за рахунок
різноманітності зв’язків, різні властивості;
- властивості електронної апаратури, формуються за рахунок
з’єднань типових електронних елементів згідно певної схеми;
- в будівництві, з одних і тих же типових, елементів
формуються будови різного призначення;
- організаційні системи, з однієї елементної бази (людей) за
рахунок організації формуються різні структури (держава,
парламент, армія, міністерство, адміністрація, відділ, академічна
група студентів, сім’я і т. п.);
- любі розділи науки можна розглядати як систему поять які
певним чином зв’язані між собою і в результаті отримуються нові
семантичні властивості (наприклад другий закон Ньютона зв’язує
поняття сили, маси і прискорення, закон Ома зв’язує поняття
струму, падіння напруги і опору і т. д.).
1.2 Характеристики систем
Якщо проаналізувати взаємодію людини з любою системою
то можна виділити три основні функції:
- спостереження (відображення) системи у свідомості;
- формування мети впливу на систему на основі апріорних
знань;
- фізичний чи інтелектуальний вплив на систему.
В залежності від задачі дослідження всі функції можуть не
використовуватись, але спостереження присутнє завжди.
Виходячи з цього любій системі притаманні три основні
характеристики (рис.1.1):
- множина впливів на систему зовнішнього середовища
(зовнішнім впливом, входом системи, вхідною дією) – U .
- множина змінних стану системи (станом системи) – X ;
7
- множиною впливів системи на зовнішнє середовище (вихід
системи, вихідна дія, реакція системи).
Характеристики U і Y є зовнішніми характеристиками
системи. Стан системи X є внутрішньою характеристикою і
відповідає накопиченню системою (запасом системи) характерної
для неї матерії (енергії, речовини, інформації, знань і т.д.), як
правило для користувача ця характеристика недоступна і
непотрібна.
U
Y
X
Рисунок 1.1 – Характеристики системи
Фактично сприйняття любого об’єкту, виділення його серед
інших (ідентифікація) здійснюється за його реакцією на
зовнішній вплив і/або на внутрішній стан. Дійсно у абсолютній
темряві, використовуючи тільки органи зору, розпізнати об’єкт
неможливо, при умові що він не володіє внутрішнім джерелом
випромінювання. Тобто фізично замкнути систему зафіксувати
неможливо. Спостереження здійснюється за допомогою органів
відчуття (зору, нюху, смаку і т. д.), при необхідності можуть
використовуватись проміжні технічні засоби перетворення
інформації.
1.3 Поняття керування системою
Прийняття характеристик системи обумовлено основною
постановочною задачею – навіщо нам потрібно досліджувати
системи, “робота заради роботи не робиться”. Причому під
терміном дослідження розуміються поняття: дослідження,
вивчення, розробка, проектування і т. п. Відповіддю є “Щоб
використовувати системи для власних цілей (потреб)”, тобто
можливістю керування системою.
Якщо проаналізувати процес використання систем то можна
зробити висновок, що він полягає у цілеспрямованому впливі на
систему з метою отримання необхідних результатів (виходу
системи), інакше кажучи у керуванні системою. Однак, щоб бути
спроможнім здійснювати таке керування, треба знати який вплив
треба здійснити на систему, щоб отримати заданий результат.
Формально це можна описати за допомогою операторів
відображення:
L : (U, X) Y ,
8
(1.1)
вхід, стан у вихід;
G : (U, X) X ,
(1.2)
вхід, стан у стан.
У повсякденному житті ми весь час використовуємо знання,
які формально представляються цими операторами, навіть не
задумуючись про це. Як правило це представлено у вигляді
інтуїції і навичок, що формуються у людини з дня її народження.
Так пишучі олівцем, або ручкою ми інтуїтивно знаємо як треба
вплинути на систему, щоб досягти необхідного результату, тобто
знаємо закономірність (1.1). Якщо дати пишучу ручку індійцю з
джунглів Амазонки то спочатку він не знайде методики її
застосуванню, однак застосувавши емпірико-інтуїтивний підхід
він зможе визначити необхідний керуючій вплив для її
використання.
При використанні складних технічних засобів необхідна
інформація у вигляді оператора (1.1), а при їх налагоджуванні,
або ремонту і (1.2), як правило, отримується з технічної
документації, зокрема з інструкції по експлуатації.
Таким чином кінцевою метою дослідження систем є
отримання закономірностей типу (1.1) і (1.2) у вигляді
необхідному при даному розгляді (описовому, причиновонаслідковому, кількісному і т. п.). Таке представлення системи
називають моделлю системи, а процес знаходження цих
закономірностей і їх дослідження моделюванням.
1.4 Класифікація (таксономія) представлення систем
Класифікація (таксономія) систем теж є деяка абстрактна
система об’єктами якої є властивості які пов’язують групи
елементів між собою, тобто накладаються зв’язки.
Часто вживане поняття „класифікація систем” є не зовсім
вдалий, так як одна і таж система в залежності від мети
дослідження і глибини розгляду може відноситись до різних
класів. Фактично здійснюється класифікація з точки зору
абстрактного представлення систем і тому краще застосовувати
поняття „класифікація представлення систем”.
По взаємодії з оточуючим середовищем представлення
систем можна поділити на
Відкриті, взаємодіють з оточенням.
Замкнуті, не взаємодіють з оточенням.
Очевидно, що в природі замкнутих систем не існує (без
9
зовнішньої взаємодії їх неможливо спостерігати, їх нема). Однак,
при деякому розгляді, для спрощення опису - системи можна
вважати замкнутими.
По інерційності представлення систем можна поділити на:
Статичні (без інерційні), тут вважається, що переходи
можуть відбуватися миттєво, процеси в них описуються за
допомогою функціональних залежностей між входом станом і
виходом, тобто знаючи, у конкретний момент часу, значення
входу і стану системи можна визначити значення виходу (при
миттєвій зміні входу миттєво міняється вихід) .
Динамічні (інерційні), вважається, що переходи не можуть
відбуватися миттєво, процеси в них описуються за допомогою
інтегродиференціальних рівнянь.
Очевидно, що в природі статичних систем не існує, система
не може знаходитись одночасно у двох різних станах, а миттєвій
зміні стану відповідає нескінченне прискорення, тобто згідно
другому закону Ньютона a F / m для цього необхідна
нескінченна сила. Так час переходу електрона з орбіти на орбіту
визначає частоту електромагнітного випромінювання. Однак у
випадках коли перехідними процесами можна нехтувати систему
можна розглядати як статичну.
Наприклад якщо досліджувати лампу розжарювання в
прямому - побутовому використанні, або при частоті включення
декількох Гц. її доцільно розглядати як статичну систему, однак
при передачі за її допомогою сигналів з частотами десятки Гц.
необхідно враховувати інерційність, тобто розглядати як
динамічну систему.
По визначеності представлення систем можна поділити на:
Детерміновані (визначені), вважається, що невизначеність
повністю відсутня і при наявності повної інформації про функції
входу і стану вихід системи визначається однозначно, S1 –
системи.
Стохастичні (ймовірностні), вважається, що процеси в
системі мають статистичний характер, описуються за допомогою
апаратів теорії ймовірності та математичної статистики, S 2 –
системи.
Хаотичні, повністю невизначені вважається, що зовсім не
можна передбачити поведінку системи, прикладом є
Броунівський рух, S 3 – системи.
Складні системи, володіють особливими властивостями
10
(унікальності, слабо передбачуваності, негентропійності),
прикладом є складні технічні системи, біологічні, організаційні
системи, системи де складовою підсистемою є людина S 0
системи.
Очевидно, що абсолютно детермінованих систем нема,
завжди притаманна деяка ступінь невизначеності (система може
вийти з ладу), однак у більшості випадків, щоб не ускладнювати
розрахунки, системи розглядаються як детерміновані. У випадках
коли система використовується на відповідальних ділянках (в
атомній енергетиці, космічній техніці, медицині, і т.д.) системи
слід розглядати як стохастичні.
З іншого боку систему можна розглядати, як сукупність
елементів, яка володіє наступними ознаками:
- зв’язками, які дозволяють через переходи по них від
елемента до елемента з’єднати два будь-яких елемента
сукупності (зв’язність системи);
- властивістю (призначенням, функції), відмінною від
властивостей окремих елементів сукупності (функція систем).
Виходячи з цього визначення найбільш простим є "кортежне"
представлення систем:
: {{M}, {U}, F } ,
(1.3)
де – система, {M} – сукупність елементів; {U} – сукупність
зв’язків; F – функція системи. Запис (1.3) розглядається як
найбільш простий опис змісту системи.
Практично будь-який об’єкт з певної точки зору може
розглядатися як система. Важливо усвідомити – чи корисний
такий погляд, чи розумно рахувати даний об’єкт елементом. Так,
системою можна рахувати радіотехнічну плату, що перетворює
вхідний сигнал у вихідний. Для спеціаліста з елементної бази
системою буде слюдяний конденсатор на цій платі, а для хіміка –
і сама слюда, що має досить складну будову.
Великою системою називається система, що включає значну
кількість однотипних елементів і однотипних зв’язків.
Важливим класом складних систем є так звані автоматизовані
системи. Слово “автоматизований” вказує на присутність
людини, використання її активності всередині системи при
збереженні значної ролі технічних засобів. Для складної системи
автоматизованому режиму надається перевага. Наприклад,
приземлення літака виконується при участі людини, а автопілот
11
звичайно використовується лише при відносно простих рухах.
Також типова ситуація, коли розв’язок, що виробляється
технічними засобами, затверджується до виконання людиною.
Тому автоматизованою системою називається складна
система з визначеною роллю елементів двох типів:
– технічних засобів;
– дій людини.
Її символьний запис в порівнянні з (1.3) має вигляд:
(1.4)
A: {{MT }, {M Л }{U}, F},
де {MТ } – сукупність технічних засобів, в першу чергу ЕОМ;
{M Л } – сукупність розв’язків та інша активність людини.
1.5 Контрольні запитання
1. Що таке система?
2. Розкрити зміст понять вхід, стан, вихід, як основних
характеристик системи.
3. Розкрити зміст понять інерційності і визначеності
системи.
4. Що таке представлення систем як замкнутих і
розімкнутих.
5. Класифікація представлень систем.
6. Характеристики систем.
7. Розкрити зміст поняття – управління системою.
8. Що таке "Кортежне" представлення систем.
1.6 Перелік джерел
1 Дружинин В.В, Конторов Д.С. Системотехника. М.:
Радио и связь. 1985.- 200с.
2 Губанов В.А., Захаров В.В., Коваленко А.А. Введение в
системный анализ: Учебное пособие. Л: Изд-во Ленинградского
у-та, 1988.- 232 с.
3 Гиг Дж. Прикладная общая теория систем: Перевод с
англ. - М: Мир, 1981, 733 с.
12
2 ДИНАМІЧНІ СИСТЕМИ ПЕРШОГО ПОРЯДКУ
2.1 Приклади систем першого порядку
Опис за допомогою змінної стану дозволить представити
багато фізичних систем відповідними співвідношеннями
диференціальних рівнянь першого порядку виду
x(t ) f ( x(t ), u(t ), t )
і сукупністю функціональних співвідношень виду
y(t ) g ( x(t ), u(t ), t ) ,
де t – час, u(t) – вхідні змінні, у(t) – вихідні змінні системи і x(t) –
змінні стану.
Розглянемо систему із заданими вхідними і вихідними
змінними. Перша з виникаючих при цьому задач полягає у виборі
змінних стану і отримання співвідношень, що є функціями f і g.
Друга задача, природно, полягає в тому, щоб розібратися в
математичному значенні цих виразів. Використання рівнянь для
змінних стану при моделюванні фізичних систем дає можливість
вивчати ці системи на єдиній математичній мові.
Таким чином, нас в першу чергу цікавитимуть проблеми
отримання рівнянь для змінних стану даної фізичної системи, а
потім їх якісне і кількісне дослідження. Почнемо з найпростіших
систем першого порядку; їх уявлення виявляється якнайменш
громіздким і дозволяє поступово освоїти методику моделювання
і математичного аналізу систем загального вигляду.
Багато
фізичних
систем
можуть
бути
описані
диференціальними рівняннями першого порядку які називаються
системами першого порядку. Вони важливі не тільки самі по
собі, але і тому що іноді поведінку складніших систем можна
оцінити виходячи з уявлення їх співвідношеннями першого
порядку.
Приклади, розглянуті нижче, дають можливість ближче
познайомитися з системами першого порядку і проілюструвати їх
вживання на практиці.
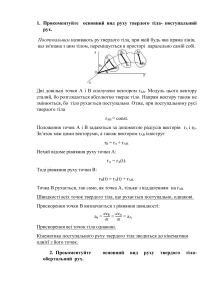
Приклад 5.1: Розглянемо падіння точкового тіла з масою т
(рис.5.1) у в'язкому середовищі з опором, пропорційним
швидкості x(t). На тіло діють дві зовнішні сили: сила тяжіння mg і
сила опору середовища – k x (t ) . Якщо позначити через d
відстань від тіла до деякого заданого положення, то рівняння
13
руху матиме вигляд
md mg kd (t )
(5.1)
Оскільки швидкість x(t ) d (t ) одержимо диференціальне
рівняння першого порядку
x (t )
k
x(t ) g.
m
(5.2)
Рисунок 5.1. - Тіло з масою т, падаюче у в'язкому
середовищі з опором, пропорційним швидкості.
Приклад 5.2: Кожна з шести простих схем, приведених на
рис.5.2, складається з одного лінійного постійного опору, одного
лінійного постійного накопичувача енергії і одного зовнішнього
джерела енергії. Якщо вихідний сигнал виражається через змінну
джерела (тобто через струм зовнішнього джерела напруги або
через напругу зовнішнього джерела струму), то рівняння для цих
схем можна записати таким чином: для схеми на рис. 5.2,а
x (t )
1
1
x(t )
ˆ (t )
RC
RC
і
i(t )
1
1
x(t ) ˆ (t )
R
R
для схеми на рис. 5.2,б
x (t )
1ˆ
i (t )
C
і
(t ) x(t ) Riˆ(t )
для схеми на рис. 5.2, в
x (t )
1
1
x(t ) iˆ(t )
RC
C
і
(t ) x(t );
для схеми на рис. 5.2, г
14
x (t )
R
1
x(t ) ˆ (t )
L
L
і
i (t ) x(t );
для схеми на рис. 5.2, д
x (t )
1
ˆ (t )
L
і
i (t ) x(t )
1
ˆ (t )
R
для схеми на рис. 5.2, е
x (t )
R
R
x(t ) iˆ(t )
L
L
і
(t ) Rx (t ) Riˆ(t ) .
Рисунок - 5.2 Електричні схеми з одним накопичувачем
енергії
Легко бачити що в кожному випадку будь-яка змінна
ланцюга (будь-який вибраний вихідний сигнал) виявляється
лінійною комбінацією змінної х і вхідної змінної зовнішнього
джерела. Далі знаходимо, що рівняння, що описують ці шість
схем разом з рівнянням (5.2), яке описує механічну систему є
окремими випадками лінійного диференціального рівняння з
постійними коефіцієнтами вигляду
x (t ) ax(t ) bu(t ),
(5.3)
де а і b – речовинні скалярні константи, а u ( t ) – вхідна дія
(рівне відповідно v ( t ) або i ( t ) ) . Крім того, розглянуті вище
15
шість схем описуються лінійними рівняннями алгебри з
постійними коефіцієнтами вигляду
y (t ) cx(t ) du (t ),
(5.4)
де с і d – речовинні скалярні константи, а у ( t ) ( i ( t ) або v ( t )
відповідно) – вихідна змінна. Отже, розв’язки рівнянь (5.3) і (5.4)
достатньо, щоб визначити розв’язок для всіх описаних вище
систем.
Істотно відзначити, що диференціальними рівняннями
першого порядку можна описати не тільки багато простих
електричних і механічних систем, але і інші фізичні явища.
Наприклад, процеси, що включають хімічні реакції або складання
сумішей, часто описуються співвідношеннями першого порядку.
Приклад 5.3: У резервуар, що містить V літрів води,
поступає розчин солі концентрацією k грамів на літр з
постійною швидкістю v літрів в хвилину. Суміш витікає з
резервуару з тією ж швидкістю. Однорідність суміші
забезпечується перемішуванням. Визначити кількість солі, що
міститься в резервуарі, у будь-який момент часу t 0 . Хай x(t )
позначає кількість солі у момент t . Збільшення кількості солі
задовольняє рівнянню
v
x (t ) kv.
V
і, оскільки нас цікавить кількість солі e момент t
x (t )
y (t ) x(t ).
(5.5)
(5.6)
Відзначимо, що вирази (5.5) і (5.6) аналогічні виразам (5.3) і
(5.4) відповідно.
Системи, розглянуті вище, інваріантні щодо зсуву часу
(стаціонарні); це дозволяє описувати їх диференціальними
рівняннями з постійними коефіцієнтами. Тепер розглянемо
декілька прикладів лінійних нестаціонарних систем першого
порядку, які можна описати диференціальними рівняннями із
змінними коефіцієнтами вигляду
x(t ) a(t ) x(t ) b(t )u(t ).
16
(5.7)
Приклад 5.4: Ракета рухається під дією реактивної сили, що
виникає при закінченні газів з її сопла. Оскільки гази
утворюються в результаті того, що згоряє паливо, що є на борту,
то маса ракети не залишається постійною, а знижується з
витратою палива. Нехай m (t) позначає масу ракети залежно від
кількості палива у момент t, x(t ) – швидкість ракети і u(t) швидкість закінчення газів. Єдина зовнішня сила в системі у
момент t– сила тяжіння. Рівняння вертикального руху ракети має
вигляд
x (t )
1
m (t )( x (t ) u(t )) g.
m( t )
Приклад 5.5: У схемі (рис.5.3) опір зростає з часом по
лінійному закону, а індуктивність залишається постійною. Нехай
v(t) – напруга на вході, а x(t) – струм в ланцюзі. Рівняння, що
описує систему, має вигляд
x (t )
R0 t
1
x(t ) (t ).
L
L
Рисунок 5.3 - Лінійний нестаціонарний ланцюг першого
порядку.
Розглянемо приклад нелінійної системи першого порядку,
яку можна описати диференціальним рівнянням першого порядку
більш загального вигляду
x (t ) f ( x(t ), u(t ), t ),
(5.8)
де u (t) – деякий вхідний вплив.
Приклад 5.6: Схема, представлена на рис. 5.4, містить
лінійний конденсатор
iC (t ) C
17
dx(t )
dt
і нелінійний резистор (діод)
q
iD I S exp D 1.
nkT
За законом Кірхгофа для струму
iD i(t ),
а за законом Кірхгофа для напруги
D x(t ) u(t ).
Таким чином, приходимо до рівняння
I q( x (t ) u(t ))
x (t ) S exp
1,
C
nkT
яке має вид рівняння (5.8).
а)
б)
Рисунок 5.4 - Простий нелінійний електричний ланцюг
(а) і характеристика діода (б)
Найпоширеніша форма диференціальних рівнянь першого
порядку,
які
ми
розглядали
дотепер,
представлена
співвідношенням (5.8). Для заданої системи різні функції від
внутрішніх змінних звичайно позначаються, як вихідні змінні.
Тому для опису системи повинно бути використано принаймні
ще одне рівняння вигляду
y(t ) g ( x(t ), u(t ), t ),
(5.9)
як доповнення до диференціального рівняння (5.8). Якщо система
має більше одного входу, вирази (5.8) і (5.9) записуються у
вигляді
x (t ) f ( x(t ), u1 (t ), u2 (t ),..., un (t ), t )
(5.10)
і
y (t ) g ( x(t ), u1 (t ), u2 (t ),..., un (t ), t ).
(5.11)
Задана система може мати декілька виходів, в цьому випадку
18
її можна описати рівнянням (5.10) і сукупністю співвідношень
y1 (t ) g1 ( x (t ), u1 (t ), u2 (t ),..., un (t ), t ),
y 2 (t ) g 2 ( x (t ), u1 (t ), u2 (t ),..., un (t ), t ),
.......... .......... .......... .......... .......... .......... .....
(5.12)
y n (t ) g n ( x (t ), u1 (t ), u2 (t ),..., un (t ), t ).
Приклад 5.7: Розглянемо систему з двома входами і трьома
виходами (рис. 5.5). Рівняння, що описують цю систему, мають
вигляд
4
1
4
x (t ) (t ) i (t ),
15
5
15
22
9
27
y1 (t )
x (t ) (t ) i (t ),
5
5
5
4
1
19
y 2 (t ) x (t ) (t ) i (t ),
5
5
5
4
1
4
y3 (t ) x (t ) (t ) i (t ).
15
5
15
x (t )
Рисунок 5.5 - Система з двома входами і трьома
виходами.
2.2 Стан системи і його властивості
Нижче ми обмежимося розглядом систем з одним входом і
одним виходом. Це обмеження швидше пов'язано із зручністю
викладу, ніж з дійсними потребами, і його легко можна зняти. Ми
переконалися, що самим загальним математичним описом
системи першого порядку є сукупність рівнянь
x (t ) f ( x(t ), u(t ), t ),
(5.13,а)
y(t ) g ( x(t ), u(t ), t ) .
(5.13,б)
Відомо, що розв’язок диференціального рівняння першого
19
порядку (5.13а) залежить від однієї початкової умови, наприклад
x (t0 ) x0 , де t 0 – початковий момент часу.
Приклад 5.8: Простий RС - ланцюг (рис.5.6) описується
рівнянням
1
1
x (t ) u (t )
RC
RC
де х(t) – напруга між пластинами конденсатора. Розв’язок
цього рівняння має вигляд
t
1
1
x (t ) exp
(t t0 ) x (t0 ) exp
(t )u( )d,
RC
RC
t0
що може бути перевірене прямою підстановкою. Якщо вхідна
дія u(t ) задано для всіх t t0 , то x(t) точно визначається
через відому початкову напругу на конденсаторі x (t0 ) .
Наведений приклад показує необхідність включення
початкових умов в характеристику системи. Ця величина
визначає подальшу поведінку системи.
x (t )
Рисунок - 5.6 Простий RС - ланцюг.
Початкові умови можна розуміти як характеристику
стану системи в початковий момент часу t0 .
Стан системи в момент t0 є такий набір відомостей про
поведінку системи якого разом з деякою можливою вхідною дією
заданою при t0 t t j , достатньо для однозначного визначення
вихідного сигналу для t0 t t j при будь-кому t j t0 .
Часто представляє інтерес канонічне представлення
системи. В цьому випадку під станом розумітимемо мінімальний
набір згаданих відомостей.
Для систем, описуваних диференціальними рівняннями
першого порядку, початкова умова в момент t 0 можна узяти як
стан системи в момент t 0 .
20
Відмітимо, що в прикладі 5.8 напругу на конденсаторі x(t )
можна розглядати як стан системи в довільний момент часу t.
Дійсно, нехай t1 t0 , тоді
t1
1
1
x(t1 ) exp
(t1 t0 ) x(t0 ) exp
(t1 )u( )d,
RC
RC
t0
Тому для всіх t t1 справедливий вираз
t1
1
1
1
x(t ) exp
(t t1 ) exp
(t1 t0 ) x(t0 ) exp
(t1 )u( )d
RC
RC
RC
t0
t
1
exp
(t )u( )d,
RC
t0
який можна записати у вигляді
t
1
1
x (t ) exp
(t t1 ) x(t1 ) exp
(t )u( )d.
RC
RC
t0
Оскільки момент t1 довільний, його можна замінити змінною
, тому в загальному випадку
t
1
1
x (t ) exp
(t ) x ( ) exp
(t )u( )d.
RC
RC
t0
Знання x() і u(t ) , повністю визначає поведінку системи для
t . Отже x(t ) є станом системи для будь-якого t.
Сукупність рівнянь:
x (t ) f ( x(t ), u(t ), t ),
(5.14)
y (t ) g ( x(t ), u(t ), t )
називається рівнянням стану у стандартній формі причому
перший вираз (диференціальне рівняння) називається рівнянням
стану, а другий вираз – рівнянням вхід – стан – вихід.
Можна виділити три специфічних типи станів, які важливі в
практичному аналізі систем: нульовий стан, сталий стан і стан
рівноваги.
Нульовим станом називають деякий стан , для якого
0 g (, 0, t )
при всіх t0 t .
Іншими словами, нульовий стан володіє наступною
властивістю: якщо система знаходиться в нульовому стані
x (t0 ) і вхідний вплив є нульовим u(t ) 0, при t0 t , то
вихідний сигнал системи також виявляється нульовим y(t ) 0,
21
при t0 t . Слід відмітити, що нульовий стан необов'язково
єдиний
Встановлений стан, якщо він існує, є такий єдиний стан ,
в який система приходить при нульовому вхідному впливі
незалежно від початкового стану.
Стан рівноваги є деякий стан , в якому система
залишається при нульовому вхідному впливі
f (, 0, t ) 0
при будь-кому t0 t .
Приклад 5.9: Ці три типи станів легко ілюструються на
прикладі бусини, що ковзає по дроту (рис.5.7). Припустимо, що
при ковзанні бусини уздовж дроту виникає сила тертя, діюча на
бусину і перешкоджаюча її руху. Припустимо, що сила тяжіння
постійна.
Швидкість
бусини
пропорційна
компоненті
результуючої сили, діючої на бусину уздовж дроту:
ds
(t ).
dt
Для математичного опису системи припустимо, що зовнішня
сила, діюча на бусину (яка включає силу тяжіння), складає вхідну
змінну, швидкість бусини при русі уздовж дроту є вихідною
змінною і положення бусини на дроті (відстань s від лівого кінця
дроту) є станом системи. Стан рівноваги і нульовий стан вказано
на рис. 5.7,а. Ця система не має сталого стану. Аналогічна
система із сталим станом показана на рис.5.7,б. Відмітимо, що
стан рівноваги і нульовий стан не співпали б, якби ми визначили
вихідну змінну як висоту над деяким довільним рівнем. В цьому
випадку існував би тільки нульовий стан, який визначається
вибраним нульовим рівнем, співпадаючим з висотою одного з
станів рівноваги; інші стани рівноваги не були б нульовими
станами (якщо рівні не співпадають).
а)
б)
Рисунок - 5.7. Намистина, що ковзає по дроту
22
2.3 Лінійність систем
Вивчення лінійних систем робиться звичайно з двох причин:
по-перше, характеристики багатьох систем мають лінійний
характер в певних областях зміни параметрів систем і, по-друге,
детальне математичне дослідження лінійних систем достатньо
просте, тоді як аналіз більш загальних систем у ряді випадків
виявляється неможливим.
Поняття «лінійності» означає наявність деякого виду
пропорційності між вхідними і вихідними змінними. Для більш
точного розуміння цього поняття слід зробити деякі попередні
визначення.
Якщо вхідна змінна системи нульова, а реакція системи
відмінна від нуля, то ця реакція є єдино можливою реакція для
даного початкового стану (або початкового запасу енергії) і
називається реакцією системи на нульову вхідну дію. Слід
відмітити, що якщо початок розвитку системи співпадає з
нульовим станом, то реакція на нульову вхідну дію повинна бути
нульовою.
Реакція системи на нульовий початковий стан, є реакція
системи на довільну вхідну дію при нульовому початковому
стані.
Система називається лінійною відносно нульового
початкового стану, якщо вона задовольняє властивостям
однорідності і адитивності відносно нульового початкового
стану:
Однорідність: якщо y u є реакція системи на нульовий
початковий стан при довільній вхідній дії u , то реакція на
нульовий початковий стан при вхідній дії cu буде cy u , де с –
довільна стала.
Адитивність: якщо y u1 є реакція системи на нульовий
початковий стан при довільній вхідній дії u1 , а y u 2 є реакція
системи на нульовий початковий стан при довільній вхідній дії
u 2 , то yu1 yu 2 є реакція на нульовий стан при вхідній дії u1 u2 .
Система називається лінійною відносно нульової вхідної
дії, якщо вона задовольняє властивостям однорідності і
адитивності відносно нульової вхідної дії:
Однорідність: якщо реакція системи на нульову вхідну дію
23
при довільному початковому стані - x 0 є y 0 , то реакція на
нульову вхідну дію при початковому стані - cx 0 є cy 0 .
Адитивність: якщо y1 є реакція системи на нульову вхідну
дію при будь-якому довільному початковому стані x1 , а y 2 –
реакція системи на нульову вхідну дію при будь-якому
довільному початковому стані x 2 , то y1 y 2 є реакція системи
на нульову вхідну дію при початковому стані x1 x2 .
Приклад 5.10: Розглянемо систему, для якої реакція на
нульовий стан задається виразом
t
y (t ) e ( t ) u( )d, t t 0 ,
ta
де u є дійсна функція часу. Ця система однорідна: якщо
реакція на u є у , то реакція на с u є с у для будь-якої
постійної c і довільної вхідної змінної u . Крім того, ця
система адитивна: якщо реакція на u1 є y1 , а реакція на u 2 є
y 2 , то реакція на u1 u2 є y1 y 2 . Отже, система лінійна щодо
нульового стану.
Приклад 5.11: Розглянемо систему (випрямляч), реакція на
нульовий стан якого має вигляд
y (t ) u(t ) ,
де u – дійсна функція часу. (Тут не вводиться поняття стану,
оскільки випрямляч має миттєву реакцію на вхідну дію, хоча
поняття нульового стану для нього має сенс.)
Ця система неоднорідна: якщо у є реакція на u , то реакція на
с u буде c 2 y . Отже, випрямляч нелінійний щодо нульового
стану. Крім того, система неадитивна: бо якщо y1 є реакція на u1
і y 2 реакція на u 2 , то реакція на u1 u2 не є y1 y 2 .
2
Приклад 5.12: Розглянемо систему, для якої реакція на
нульову вхідну дію задана виразом
y (t ) e ( tt0 ) x(t 0 ).
Легко перевірити, що ця система однорідна щодо нульової
вхідної дії і адитивна; отже, вона лінійна щодо нульової вхідної
дії. Таким чином, RС - ланцюги (приклад 5.8), які описуються
24
виразом
t
1
1
y (t ) exp
(t t0 ) x (t0 ) exp
(t )u( )d,
RC
RC
t0
де вихідна змінна – напруга на конденсаторі, є лінійними щодо
нульового стану і нульової вхідної дії.
Приклад 5.13: Система, описувана співвідношенням вхід –
стан – вихід:
y (t ) e
( t t0 )
x (t 0 ) e ( t ) u( )d.
2
t
t0
нелінійна щодо нульової вхідної дії.
Система володіє властивістю декомпозиції, якщо вона
задовольняє умові: якщо y 0 – реакція системи на нульову вхідну
дію для довільного початкового стану і y u – реакція системи на
нульовий початковий стан для довільної початкової вхідної дії, то
результуюча реакція на той же початковий стан і ту ж вхідну дію
є y0 yu .
Система називається лінійною, якщо вона лінійна
відносно нульового початкового стану, лінійна відносно вхідної
дії і задовольняє властивості декомпозиції.
2.4 Лінеаризація нелінійних систем
Більшість реальних систем нелінійна, тобто поведінка
системи описується рівнянням
x (t ) f ( x(t ), u(t ), t ),
y (t ) g ( x(t ), u(t ), t ),
а не більш простими лінійними рівняннями
x (t ) a(t ) x(t ) b(t )u(t ),
y (t ) c(t ) x(t ) d (t )u(t ).
(5.14)
(5.15)
Часто на практиці нелінійну систему можна апроксимувати
лінійною в деякій обмеженій області. Так при вивченні
нелінійних електричних ланцюгів (наприклад, транзисторного
підсилювача) для відповідного ланцюга виділяють сигнал в
деякому околі точки розгляду і проводять його аналіз. Щоб
25
зрозуміти процедуру отримання наближеної лінійної моделі,
припустимо, що розв’язки xn (t ) і yn (t ) рівнянь (514) відомі при
заданій початковій умові xn (t0 ) xn 0 і вхідної змінної un (t )
тобто
xn (t ) f ( xn (t ), un (t ), t ),
(5.16)
yn (t ) g ( xn (t ), un (t ), t )
(5.17)
і
x n ( t0 ) x n 0 .
Тепер припустимо, що початковий стан і вхідну змінну
змінено так, що новий стан і вхідна змінна мають вигляд
x (t ) xn (t ) (t ) ,
u(t ) un (t ) (t ).
Тоді вихідну змінну
y ( t ) y n ( t ) ( t )
можна знайти за допомогою розв’язку обурених рівнянь
xn (t ) (t ) f ( xn (t ) (t ), un (t ) (t ), t )
і
y0 (t ) (t ) g ( xn (t ) (t ), un (t ) (t ), t ).
У результаті розкладання в ряд Тейлора можна отримати
df
df
xn (t ) (t ) f ( xn (t ), un , t )
(t )
(t ) (2 , 2 )
dx xn , un
du xn , un
і
yn (t ) (t ) g ( xn (t ), un (t ), t )
dg
dg
(t )
(t ) (2 , 2 ),
dx xn , un
du xn , un
(2 , 2 ) залишковий член другого порядку малості відносно
і . Передбачається, що функції f і g двічі диференційовані по
всіх аргументах, окрім, мабуть, t . Тоді, нехтуючи (2 , 2 ) , і
використавши рівності (5.16) і (5.17) можна одержати наступні
лінійні апроксимуючі рівняння:
f
f
(t )
(t )
(t )
x xn ,un
u xn ,un
і
g
g
(t )
(t )
(t ).
x xn ,un
u xn ,un
Ці вирази можна переписати у вигляді
26
(t ) a(t ) (t ) b(t ) (t ),
(t ) c(t ) (t ) d (t ) (t ),
(5.18)
де
a (t )
f
f
, b(t )
,
x xn ,un
u xn ,un
c(t )
g
g
, d (t )
.
x xn ,un
u xn ,un
Вирази (5.15) і (5.18) насправді аналогічні. Припущення, що
мало, звичайно справедливо, оскільки – вхідні (керовані)
відхилення. Проте не завжди можна забезпечити малість 2 .
Лінійну систему, описувану рівнянням (5.15), можна
використовувати для характеристики поведінки нелінійної
системи, описуваної рівнянням (5.14) в тій області, де значення
2 залишається малим. Питання про малість 2 як правило
вирішується при дослідженні стійкості.
2
Приклад 5.1 6 : Проста нелінійна схема першого порядку
складається з нелінійного постійного конденсатора і нелінійного
опору (рис.5.9,а). Диференціальне рівняння, що описує цю
систему, має вигляд
x (t ) x 2 (t ).
Неважко показати, що розв’язком цього рівняння є
x(t )
x(t0 )
.
1 x(t0 )(t t0 )
(5.19)
(5.20)
(Зауваження. Вироджений розв’язок можливий в тому
випадку, якщо знаменник обертається в нуль.) Лінеаризована
система, відповідна початковій системі, описується рівнянням
2 x (t 0 )
(t )
(t ),
1 x(t 0 )(t t 0 )
розв’язок якого має вигляд
(t0 )
(t )
(t ) .
(1 x(t0 )(t t0 )) 2
Нехай x0 (t ) функція стану, яка відповідає початковій умові
x0 (t0 ) , і x1 (t ) - функція стану, яка відповідає початковій умові
x1 (t0 ) , тоді
x1 (t ) x0 (t ) (t ) ~
x1 (t ) ,
(5.21)
27
де
x1 (t0 ) x0 (t0 )
(5.22)
(t )
(1 x(t0 )(t t0 )) 2
при умові, що x x1 x0 , залишається малим. Нехай t0 0 ,
x0 (t0 ) 1 . Розглянемо наступні два випадки: x1 (t0 ) 1,1 і
x1 (t0 ) 2,0 . Для першого випадку розв’язок, визначається (5.20) і
має вигляд
1,1
,
x1 (t )
1 1,1t
а наближений розв’язок, визначається (5.21) і (5.22), і має вигляд
1
0,1
~
x1 (t )
.
1 t (1 t ) 2
(t )
Рисунок 5.9 - Простий нелінійний RC - ланцюг (а); точний
і наближений розв’язок для малих відхилень в початковому
стані (б); точний і наближений розв’язок для великих
відхилень в початковому стані (в).
З рис.5.9,б видно, що розв’язки x1 (t ) і ~
x1 (t ) близькі. Також
видно, що в околиці особливої точки t 1 , в якій функція
0,1
(t )
(1 t ) 2
не визначена, наближений розв’язок являється, як і слідує чекати,
є незадовільним.
Для другого випадку точний розв’язок має вигляд
2
x1 (t )
1 2t
а наближений
1
1
~
x1 (t )
1 t (1 t ) 2
28
На рис.5.9,в наведені графіки x1 (t ) і ~
x1 (t ) для цього випадку
Оскільки
1
(t )
(1 t ) 2
на порядок більше, ніж у попередньому випадку, наближене
розв’язок погано відповідає точному.
2.5 Стаціонарність систем
Іншою важливою властивістю систем є стаціонарність.
Якісно система стаціонарна, якщо її характеристики не міняються
з часом.
Розглянемо, наприклад, вхідний вплив, що діє на стаціонарну
систему, яка знаходиться в нульовому стані в момент t0 , і
зареєструємо вихідний сигнал при t t0 . Якщо така ж вхідна дія
буде прикладена до цієї системи, що знаходиться в нульовому
стані у момент t0 t і вихідна змінна буде відповідати вихідний
змінної для попереднього випадку, тільки з зсувом у часі рівним
t .
Рисунок 5.10 - Операція зсуву у часі вхідного впливу
Для простоти аналізу приймемо наступні позначення: u(t ) вхідна функція часу, uh (t ) повторює u(t ) , але зсунута по осі часу
у право на h (рис.5.10). Таким чином
uh ( t ) u ( t h ) .
(5.23)
Система
називається
стаціонарною,
якщо
вона
задовольняє наступним умовам: якщо y (t ) є реакція системи на
довільну вхідну дію u(t ) з момент часу t0 при довільному
початковому стані x 0 , то y h (t ) є реакція на вхідну дію u h (t ) при
початковому стані x 0 у момент t 0 h .
Приклад 5.17: Розглянемо знову RС - систему на рис.5.6.
Якщо напругу на конденсаторі вважатимемо вихідним сигналом,
тоді співвідношення вхід – стан – вихід для початкового моменту
29
часу t0 і вхідної дії u(t ) матиме вигляд
t
1
1
y (t ) exp
(t t0 ) x (t0 ) exp
(t )u( )d.
RC
RC
t0
Реакція даної системи на вхідну дію uh (t ) для
початкового моменту часу t1 має вигляд
t
~y (t ) exp 1 (t t ) x(t ) exp 1 (t )u( )d.
1
1
RC
RC
t1
Оскільки uh (t ) u(t h ), після заміни змінних одержимо
t h
~y (t ) exp 1 (t t ) x(t ) exp 1 (t h )u()d.
1
1
RC
RC
t1 h
Для перевірки стаціонарності покладемо t1 t0 h і
x (t1 ) x (t0 ) . Тоді
1
~
y (t ) exp
( t h t0 ) x ( t0 )
RC
t h
1
exp RC (t h )u()d y (t h) yh (t ),
t1
тобто дана система стаціонарна.
Слід відмітити, що при перевірці стаціонарності системи
істотним виявилося збереження початкового стану. По аналогії з
лінійністю можна розглянути два спеціальні визначення
стаціонарності.
Система називається стаціонарною відносно нульового
стану, якщо вона стаціонарна, коли її початковий стан є
нульовим.
Система називається стаціонарною відносно нульової
вхідної дії, якщо вона стаціонарна при нульовій вхідній дії.
Стаціонарна система є одночасно стаціонарною відносно
нульового початкового стану і стаціонарної відносно нульової
вхідної дії, проте зворотне в загальному випадку невірне. Можна
показати, що стаціонарність відносно нульового початкового
стану і стаціонарність відносно нульової вхідної дії тягне за
собою стаціонарність системи загалом тільки для лінійних
систем.
Визначення стаціонарності 5.12 дещо ширше, ніж звичне
визначення стаціонарної системи, що зустрічається (за
30
допомогою співвідношення вхід – вихід). Надалі ми
нехтуватимемо початковим станом і називатимемо систему
стаціонарної, якщо зсув вхідної функції на деяку часову
константу приводить до зсуву вихідної функції на ту ж
константу.
Приклад 5.19:Розглянемо ідеальний елемент
(рис.5.12), який описується співвідношенням
y (t ) u(t ), 0.
затримки
(5 .24 )
Для перевірки лінійності припустимо, що y0 (t ) є реакція на
вхідну дію u0 (t ) при нульовому початковому стані, тобто
ya (t ) ua (t ),
і вихідний сигнал yb (t ) є реакція на вхідну дію ub (t ) при
нульовому початковому стані, тобто
yb (t ) ub (t ).
Нехай вхідна дія має вигляд
uab (t ) ua (t ) ub (t ),
де і – довільні кінцеві константи; реакцій системи, що
знаходиться в нульовому початковому стані, є
yab (t ) uab (t ) ua (t ) ub (t ) ya (t ) yb (t ).
Отже, система лінійна щодо нульового початкового стану. Для
перевірки стаціонарності системи щодо нульового початкового
стану покладемо вхідний вплив
uh (t ) u(t h ).
При такому збудженні вихідний сигнал має вигляд
~
y (t ) uh (t ) u((t ) h ).
Оскільки
yh (t ) y (t h ) u(t h ),
то
~
y (t ) yh (t ).
Тому ідеальний елемент затримки також стаціонарний щодо
нульового початкового стану. Отже, ідеальний елемент затримки,
зображений на рис.5.12, є лінійним і стаціонарним щодо
нульового початкового стан.
31
Рисунок - 5.12. Ідеальний елемент затримки
Приклад 5.20: Розглянемо схему, приведену на рис. 5.13, де
у якості вхідного впливу u(t ) є струм, а вихідним сигналом y(t )
напруга.
Рисунок 5.13 - Лінійний стаціонарний ланцюг з
нестаціонарними елементами.
Легко показати, що
u (t )
.
y (t )
1 [1 R(t ) 1 [1 1 R(t )]
Ця схема лінійна і стаціонарна, навіть якщо два елементи
ланцюга будуть змінними.
Приклад 5.21:Тривіальним прикладом системи, яка,
очевидно, буде стаціонарна, але не лінійна, є система, що
описується співвідношенням:
y(t ) k const
для будь-якої вхідної дії. Проте, якщо ця система описується
співвідношеннями
x (t ) 0, x(t0 ) k і y(t ) x(t ),
то вона буде і стаціонарною і лінійною.
З цього прикладу видно, що насправді лінійність й
стаціонарність залежать від способу опису, системи і не є її
внутрішніми властивостями.
32
2.6 Розв’язок рівняння стану лінійних систем першого
порядку у стандартній формі
Очевидно, що необхідно розробити загальну методику
розв’язку лінійних рівнянь стану першого порядку у стандартній
формі:
x(t ) a(t ) x(t ) b(t )u(t )
(5.25,а)
y(t ) c(t ) x(t ) d (t )u(t ).
(5.25,б)
і
На першому кроці знаходимо розв’язок диференціального
рівняння (5.25,а). Потім розглядаємо відповідне однорідне
рівняння (з нульовою вхідною дією), тобто рівняння, отримане з
рівняння (5.25,а) у випадку, якщо вхідна змінна є нульовою:
dx(t )
a (t ) x (t ).
(5.26)
dt
Розв’язок однорідного рівняння легке знайти методом
розділення змінних. Розділивши змінні отримаємо:
t
x (t ) exp a ( )d x ( ),
(5.27)
інакше це є реакцією на нульовий вхідний вплив
t
(5.28)
x0 (t ) exp a ()d x(t0 ),
t 0
якщо початковий стан задається в момент t0 .
Оскільки умова
t
exp a ( )d
описує рух системи між моментами часу і t при нульовому
збудженні, це приводить до поняття перехідної функції стану
(t, ) , як відображення стану системи в момент часу , x() , у
стан системи в момент часу t , x(t ) тобто
(5.29)
x(t ) (t, ) x() ,
звідки випливає
t
(t , ) exp a ()d x (t ) x 1 ( ) . (5.30)
33
Слід відмітити, що перехідна функція стану володіє двома
властивостями:
(t, t ) 1,
(t, ) / t a(t )(t, ).
Застосувавши метод варіації змінних можна знайти реакцію
системи на нульовий початковий стан xu (t ) .
t
xu (t ) exp a()db( )u( )d.
(5.31)
t0
Загальне розв’язок знаходиться як сума розв’язок однорідного
рівняння і часткового розв’язок:
x ( t ) x0 ( t ) xu ( t ) ,
або
t
t
t
t
x(t ) exp a()d x(t0 ) exp a()db( )u( )d. (5.32)
t0
t0
Підставивши x(t ) з (5.32) у (5.25,б) можна знайти вираз для
співвідношення вхід – стан – вихід для лінійних систем першого
порядку має вигляд
t
t
t
y (t ) c(t ) exp a()d x(t0 ) c(t ) exp a()db( )u( )d b(t )u(t ).
t0
t0
(5.33)
Приклад 5.23: У прикладі 5.5 знайдено рівняння стан для
ланцюга на рис.5.3:
R t
1
x (t ) 0
x (t ) (t ),
L
L
y(t ) x(t ),
де (t ) – вхідна напруга і x(t ) – струм в ланцюзі. Для зручності
приймемо t0 0 , звідки
t
t
R0 t
2 R0t t 2
a()d L d 2 L .
t0
0
З виразу (5.33) одержимо
t
2 R0t t 2
2 R0 (t ) (t 2 2 )
1
x(t ) exp
( )d.
x0 exp
2L
2L
0 L
Для випадку стаціонарною лінійкою системи першого
34
порядку, рівняння стану у стандартній формі мають вигляд
x (t ) ax(t ) bu(t ),
y (t ) cx (t ) du(t );
(5.34)
вирази (5.32) і (5.33) мають відповідно вигляд:
x (t ) e
a ( t t0 )
t
x (t0 ) e a ( t )bu( )d
(5.35)
t0
і
y (t ) ce
a ( t t0 )
t
x (t0 ) ce a ( t )bu( )d du(t ).
(5.36)
t0
Отже отримана методика знаходження загального розв’язку
рівнянь станів у стандартній формі, що описують лінійні системи
першого порядку. Розв’язок нелінійних диференціальних
рівняння навіть для випадку першого порядку пов'язаний з
значними труднощами і зазвичай вимагає застосування методів
чисельного аналізу.
2.7 Поняття
порядку
стійкості
динамічних
систем
першого
2.7.1 Поняття стійкості
Поняття стійкості системи є фундаментальним для якісного
аналізу поведінки системи. Бажано, щоб реальні системи
(наприклад, електронні підсилювачі, супутники Землі і т. д.) були
стійкі. Тому виникає інтерес до обговорення поняття стійкості
навіть для систем першого порядку. Ми обмежуємося лише
евристичним підходом до поняття стійкості, так як теорія
стійкості систем повинна вивчатися окремо.
Розглянемо довільну систему першого порядку, яка задана
диференціальним рівнянням стану:
x (t ) f ( x(t ), u(t ), t ) ,
(5.36)
x (t 0 ) x 0
(5.37)
u(t ) при t t0 .
(5.38)
початковим станом
і вхідним впливом
Позначимо розв’язок рівняння (5.36) при вказаних вище
35
умовах через u (t; x0 , t0 ) . Очевидно, що справедлива тотожність
u (t; x0 , t0 ) f (u (t; x0 , t0 ), u(t ), t ).
(5.39)
Будь-який стан рівноваги, пов'язаний з рівнянням (5.36),
позначимо через xe (t ) , тоді згідно визначення стану рівноваги,
справедливо:
x e (t ) f ( xe (t ), 0, t ) 0.
(5.40)
Виникає два питання стосовно стійкості:
Чи буде розв’язок рівняння (5.36) для вхідної функції
u(t ) і початкового стану x (t 0 ) x 0 стійким при відповідному
відхиленні від початкового стану x (t 0 ) .
Для нульової вхідного впливу – u(t ) 0 чи буде стійким
стан рівноваги?
Розглянемо спочатку перше питання. Ми говоримо про
стійкість розв’язку в тому випадку, якщо «незначні» відхилення в
початковому стані приводять до розв’язків , «близьких» до
початкового. Нехай відхилення розв’язку x(t ) від відомого
розв’язок u (t; x0 , t0 ) буде (t ) , тобто
(t ) x(t ) u (t; x0 , t0 ).
(5.41)
Відхилення початкового стану в момент t0 буде
(t0 ) x(t0 ) u (t0 ; x0 , t0 ) ,
(5.42)
а в подальшому стійкість розв’язку можна встановити по зміні
функції (t ) . Якщо для малих (t0 ) , тобто для малого відхилення
початкового стану, величина (t ) стає великою при збільшенні t,
розв’язок можна назвати нестійким, оскільки x(t ) розходиться з
u (t; x0 , t0 ) . Якщо ж (t ) прагне нуля із збільшенням t, тобто
x(t ) асимтотично наближається до u (t; x0 , t0 ) , то розв’язок
можна назвати асимптотично стійким. Третя можливість
полягає в тому, що величина (t ) залишається малою із
збільшенням t, але при цьому не обов'язково наближається до
нуля. Такий розв’язок можна назвати стійким. Аналогічний
підхід можна застосувати і до стійкості стану рівноваги системи.
Фактично ми покажемо, що вивчення стійкості розв’язок може
бути завжди зведено до вивчення стійкості стану рівноваги
приєднаної системи
36
2.7.2 Дослідження на стійкість розв’язку рівняння
стану
Дослідження на стійкість розв’язку рівняння стану зводиться
до дослідження поведінки відхилення (t ) з плином часу, при
початковому відхиленні (t0 ) .
З виразу (5.42) одержимо
x(t ) (t ) u (t; x0 , t0 ) ,
а так як x(t ) є розв’язком рівняння (5.36) то справедлива
тотожність
(t ) u (t; x0 , t0 ) f ((t ) u (t; x0 , t0 ), u(t ), t ).
Підставивши вираз для (t ) з (5.41), можна одержати
диференціальне рівняння:
(t ) f ((t ) (t; x , t ), u(t ), t ) f ( (t; x , t ), u(t ), t ). (5.43)
u
0
0
u
0
0
Оскільки вхідна змінна u(t ) відома і основний розв’язок
u (t; x0 , t0 ) передбачається також відомим, то права частина
виразу (5.43) є функцією тільки аргументів (t ) і t, що формально
можна записати як
h((t ), t ) f ((t ) u (t; x0 , t0 ), u(t ), t ) f ( u (t; x0 , t0 ), u(t ), t )
(5.44)
Отже, відхилення від відомого розв’язку диференціального
рівняння стану, коли вхідна змінна відома, описуються
однорідним диференціальним рівнянням
(5.45)
(t ) h((t ), t ) (t0 ) 0 .
Зауважимо, що (t ) 0 є стан рівноваги, оскільки з виразу
(5.44) маємо
h(0, t ) 0.
Таким чином проблема визначення стійкості розв’язку
системи зведена до проблеми визначення стійкості стану
рівноваги,
породженого
умовою
однорідного
(t ) 0
диференціального рівняння.
Приклад 5.24: Дослідити на стійкість розв’язок системи, що
описується рівнянням стану
x (t ) 3t 2 x(t ) u(t ) , x(0) 1,
2
де вхідний вплив
37
t для t 0
u (t )
0 для t 0 ,
згідно (5.32) у околі початкового стану розв'язок буде:
t
t 2
3
1
2 2
u (t , 1, 0) exp 3 d x(0) exp 3s ds d (1 2e t ).
3
0
0
t0
Для цього треба виконати перетворення
(t ) x(t ) u (t; x0 , t0 )
і дослідити отримане однорідне рівняння
(t ) h((t ), t ) f ((t ) u (t; x0 , t0 ), u(t ), t ) f (u (t; x0 , t0 ), u(t ), t ) 3t 2(t ).
Відмітимо, що (t ) 0
перетвореного рівняння.
є
дійсно
стан
рівноваги
для
Приклад 5.25: Задана система, що описується рівнянням
x (t ) e x ( t ) x(t 0 ) u(t ).
Розв’язок при x (0) x0 і u 0 буде
u (t; x0 , 0) ln( e x0 t ).
Приєднана вільна система з станом рівноваги у початку
координат має вигляд:
(t ) h((t ), t ) (e x0 t )(1 e ( t ) ).
2.7.3 Дослідження на стійкість стану рівноваги
При розгляді стану рівноваги припускатимемо, що вхідна
змінна тотожно рівна нулю, тоді диференціальне рівняння стану
(5.36) набуває вигляду
x (t ) f ( x(t ), 0, t ).
(5.46)
Стани рівноваги, згідно визначення (5.40), визначаються як
корені рівняння, отриманого шляхом прирівнювання правої
частини (5.46) до нуля:
f ( x(t ), 0, t ) 0 .
(5.47)
Припустимо, що ця система має п станів рівноваги
xe1 , xe 2 , ..., xen . Очевидно, що справедливі рівності
38
f ( xek , 0, t ) 0, k 1, 2, ..., n.
Розглянемо будь-який з цих станів x ek . Відхилення від x ek
можна визначити через k (t ) так, що
k (t ) x (t ) xek .
Тому
k (t ) f (k (t ) xek , 0, t ) h(k (t ), t ).
(5.48)
Відмітимо, що рівняння (5.48) є однорідне диференціальне
рівняння з станом рівноваги на початку координат, тобто k (t ) 0 .
Таким чином, ми показано, що питання стійкості довільного
стану рівноваги теж може бути досліджено за допомогою
приєднаної системи, що має стан рівноваги у початку координат.
Приклад 5.26: Дано диференціальне рівняння стану
x (t ) x(t ) 6x(t ) 11x(t ) 6.
3
2
Станами рівноваги є xe1 1 ; x e 2 2 ; x e 3 3.
Зробимо три окремі перетворення:
1 (t ) x (t ) ( 1),
2 (t ) x (t ) ( 2),
3 (t ) x (t ) ( 3).
Після підстановки у (5.48) будуть отримані диференціальні
рівняння розв’язком яких є функції k (t ) . Дослідження поведінки
k (t ) при збільшення часу дає можливість судити про стійкість
стану рівноваги.
Для xe1 1 :
1 (t ) h1(1 (t ), t ) (1 1)3 6(1 1)2 11(1 1) 6,
або
1 (t ) 31 (t ) 621 (t ) 21 (t ) ;
для xe 3 3 :
2 (t ) h2 (2 (t ), t ) (2 2)3 6(2 2)2 11(2 2) 6,
або
2 (t ) 3 2 (t ) 62 2 (t ) 22 (t );
для x e 2 2 :
(t ) h ( (t ), t ) ( 3)3 6( 3)2 11( 3) 6,
3
3
3
3
3
або
39
3
3 (t ) 3 3 (t ) 62 3 (t ) 23 (t ).
У кожному випадку є стан рівноваги у початку координат.
На закінчення з'ясуємо значення поняття стійкості стосовно
стаціонарних лінійних систем першого порядку, що описуються
однорідними диференціальними рівняннями стану виду
x (t ) ax(t ).
Початок координат
x (t ) 0
є станами рівноваги. Крім того, це єдиний стан рівноваги, якщо
a 0 . Далі, приєднана однорідна система, стан рівноваги якої
досліджуються, ідентична початковій системі, тобто
(5.49)
(t ) a(t ) ,
або
h((t ), t ) a(t ).
Розв’язком рівняння (5.49) є
(t ) e ( t t0 ) (t0 ),
отже
(t ) e (t t ) (t0 ) e (t t ) (t0 ) .
0
0
Якщо дійсна частина числа негативна (t ) прагне до нуля
із збільшенням t тобто стан буде асимптотично стійким станом
рівноваги. Якщо дійсна частина числа рівна нулю (t ) (t0 ) то
стан буде стійким. Якщо ж дійсна частина числа додатна то із
збільшенням t величина (t ) може зростати до безмежності,
тобто стан буде нестійким.
2.8 Контрольні запитання
1) Що таке: динамічні системи першого порядку, стани
системи.
2) Які є характерні стани систем.
3) Які є реакції систем.
4) Що таке лінійність систем відносно стану і відносно
вхідного впливу.
5) Властивість декомпозиції. Визначення лінійності систем.
Стаціонарність систем.
40
6) Математична інтерпретація систем першого порядку.
Перехідна функція стану, її властивості.
7) Лінеаризація систем першого порядку.
8) Поняття стійкості. Дослідження на стійкість систем
першого порядку.
2.9 Варіанти завдань до практичних занять
№5.1 Нехай А – кількість речовини на початку хімічної
реакції, а х – кількість речовини, що вступила в реакцію через t
секунд. Припустимо, що швидкість зміни кількості речовини
пропорційна кількості речовини, що залишилася. Звідси витікає,
що диференціальне рівняння, що описує систему, має вигляд
x (t ) C ( x(t ) A),
де С – константа, що характеризує реакцію. Якщо A 10 кг і
С 0,1 c 1 , визначити час, після закінчення якого х стане
рівними 0,634 кг.
№5.2 Припустимо, що ми розглядаємо дві системи першого
порядку, описувані рівнянням
y (t ) ay(t ) bu(t ), y (t0 ) y0 ;
y (t ) ay(t ) bu(t ) y0 (t t0 ).
Нехай в першому випадку вхідна дія описується функцією u(t ) ,
t0 t , а в другому u(t ) y0 (t t0 ) , t0 t . Чи буде система
лінійна щодо співвідношення вхід – вихід, лінійна щодо
нульового стану, лінійна щодо нульової вхідної дії, лінійна.
№5.3 Розглянемо систему, описувану рівнянням
t
y (t ) f (t ) g (t ) h( )u ( )d .
t0
За яких умов, що накладаються на функції f, g і h, дана
система буде лінійна, стаціонарна, лінійна і стаціонарна.
№5.4 У прикладі 5.19 показана лінійність щодо нульового
стану і стаціонарність ідеального елементу затримки,
описуваного рівнянням
y (t ) u(t ), 0.
41
Визначити змінну стану, яка може характеризувати таку
систему ( Зауваження: реальний елемент затримки часто
описується диференціальним рівнянням в часткових похідних і
не допускає простору станів кінцевої розмірності, тобто реальний
елемент затримки не є система першого порядку).
Показати, що ідеальний елемент затримки буде лінійним
щодо нульової вхідної дії і стаціонарним, а також просто
лінійним і стаціонарним.
№5.5 Самий загальний опис, який ми розглядали для систем
першого порядку, має вигляд
x (t ) f ( x(t ), u(t ), t ),
y(t ) g ( x(t ), u(t ), t ).
- Показати, що якщо ця система стаціонарна, вона може
бути описана рівнянням
x (t ) f ( x(t ), u(t )),
y(t ) g ( x(t ), u(t )).
- Показати, що якщо система лінійна, вона може бути
описана співвідношеннями
x(t ) a(t ) x(t ) b(t )u(t ) ,
y(t ) c(t ) x(t ) d (t )u(t ) .
- Показати, що якщо система лінійна і стаціонарна, вона
може бути описана рівнянням
x (t ) ax(t ) bu(t )
y(t ) cx (t ) du(t ).
№5.6 Визначити, чи будуть наступні системи лінійні і/або
стаціонарні:
1) y (t ) 4u(t )
d
u(t ), t 0;
dt
2) y(t ) tu(t ) u(t 2 );
3) y(t ) u(t ) u 2 (t );
t2
4) y (t ) tu( )d;
t1
42
5) y(t ) 3u(t 1) 2u(t );
6) y (t ) h(t, )u( )d, де h(t, ) e t (et e );
7) y (t ) h(t , )u( )d, де h(t, ) e (et e );
8) y(t ) mu(t ) b, де m і b константи;
9) y(t ) minu1 (t ), u2 (t );
10)
0;
y (t ) 2u(t ),
5u(t ),
t t0 ,
t0 t t1 ,
t t1.
№5.7 Лінійна стаціонарна система має наступну реакцію
на нульовий стан:
0,
y (t ) 2
5t ,
t 0,
t 0,
при вхідній дії
t 0,
0,
u (t )
t 0.
t ,
Яка буде реакція на нульовий стан для наступних вхідних дій:
0,
1,
u(t ) 2,
1,
0,
t 2,
t 2,
2 t 3,
t 3,
t 3.
№5.8 Дана система з одновимірними просторами вхідних і
вихідних змінних, яка описується рівнянням станів
x (t ) x(t ) u(t )
y (t ) x(t )u(t ) u(t ) .
2
43
Знайти стан рівноваги. Знайти приєднану лініаризовану систему
для стану рівноваги і визначити, чи буде стан рівноваги стійким,
асимптотично стійким або нестійким.
№5.9 Лініаризувати систему:
x (t ) x 2 (t ) u(t ),
2
2
1)
y (t ) 2 x (t ) u (t ).
u ( t ) e t ; x ( 0) 1
2)
3)
x (t ) ( x (t ) 2) u(t ),
2
y (t ) ln x (t ) u (t ).
u(t ) 1 /(t 1) 3 ; x (0) 3.
x (t ) e x ( t ) u 2 (t ),
y (t ) x(t ) u(t ).
u(t ) 2 t; x(1) 0.
4)
x (t ) e x ( t ) u(t ),
y (t ) ln( x (t )) / u(t ).
u(t ) 2 t; x(1) 0.
5)
x (t ) ( x 2 (t ) x(t )),
x(t )
2
y (t ) e u (t ).
u(t ) t , x(0) 1.
6)
x (t ) x 2 (t ) 3 x (t ) 2,
y (t ) u(t ) / x (t ).
u(t ) ln( t ), x (0) 1.
7)
x 2 (t ) 1
x (t ) x(t ) ,
y (t ) e u ( t ) ln( x(t )).
u(t ) t , x(0) 1.
44
8)
x (t ) x(t ) / u 2 (t ),
2
y (t ) x (t ) / u(t ).
u(t ) t , x(1) 1.
9)
x (t ) u(t ) e x ( t ) ,
u(t )
y (t ) u (t ) x (t ) x (t ) e .
x(1) 1; u(t ) t
10)
x (t ) x 2 (t ) e u ( t ) ,
y (t ) x (t ) u(t ).
x (0) 1; u(t ) t.
11)
x (t ) u (t )
x
(
t
)
,
t
y (t ) x(t ) u(t ).
x(0) 1; u(t ) t
12)
x (t ) x 3 (t ) u(t ),
2
y (t ) 2 x (t ) x (t ) u(t ).
x (1) 1; u(t ) t 2
13)
x u (t ) / x (t ),
y (t ) sin( x (t )) cos( u (t )).
x (0) 0; u (t ) t.
14)
x (t ) ( x 2 (t ) 1) e u ( t ) .
y (t ) u(t ) x(t ).
u(t ) t , x(0) 1.
15)
x (t ) [ x(t ) t ]2 u 2 (t ),
2
2
y (t ) x (t ) / u (t ).
u(t ) t; x(0) 0.
45
16)
x (t ) e x ( t ) u(t ),
x(t )
y (t ) e ln( u(t )).
u(t ) 2 t; x(0) 0.
17)
x (t ) u(t ) / x(t ),
x(t )
2
y (t ) e u (t ).
u(t ) t; x(0) 0.
18)
x u(t ) / x 4 (t ),
.
y
(
t
)
sin(
x
(
t
))
sin(
u
(
t
))
x (0) 0; u(t ) t.
19)
x (t ) e x ( t ) u 2 (t ),
4
y (t ) x (t ) ln( u(t )).
u(t ) 2 t; x(0) 0.
20)
x (t ) sin( u(t )) e x ( t ) ,
u(t )
y (t ) x (t ) x (t ) e .
x(1) 1; u(t ) t
21)
x (t ) ( x(t ) 1) u(t ),
2
y (t ) 2 x (t ) u(t ) sin( u(t )).
x(1) 1; u(t ) t 2
22)
x u 2 (t ) / x 4 (t ),
.
y
(
t
)
sin(
x
(
t
))
ln(
u
(
t
))
x (0) 0; u(t ) t.
№5.10 Дослідити на стійкість розв’язок рівняння стану.
x (t ) ( x (t ) 2) u(t ),
1)
u(t ) 1 /(t 1) 3 ; x (0) 3.
46
2)
3)
4)
5)
6)
7)
8)
9)
10)
11)
12)
13)
x (t ) e x ( t ) u 2 (t ),
u(t ) 2 t; x (1) 0.
x (t ) ( x (t ) 2) u(t ),
u(t ) 1 /(t 1) 2 ; x (0) 3.
x (t ) e x ( t ) u (t ),
u(t ) 2 t; x (1) 0.
x (t ) ( x (t ) 1) e t ,
u(t ) t , x (0) 1.
x (t ) x (t ) / u 2 (t ),
u(t ) t , x (1) 1.
x (t ) u(t )e x ( t ) ,
x (1) 1; u(t ) t
x (t ) x 3 (t )u(t ),
x (1) 1; u(t ) t 2
x (t ) x 2 (t )e u ( t ) ,
x (0) 1; u (t ) t.
x u(t ) / x(t ),
x(0) 0; u(t ) t.
x (t ) ( x 2 (t ) 1) e u ( t ) ,
u ( t ) t , x ( 0 ) 1.
x (t ) [ x (t ) t ]2 u 2 (t ),
u ( t ) t ; x ( 0 ) 0.
x (t ) e x ( t ) u(t ),
u(t ) 2 t; x (0) 0.
47
14)
15)
16)
17)
x (t ) u(t ) / x(t ),
u(t ) t; x(0) 0.
x (t ) e x ( t ) u 2 (t ),
u(t ) 2 t; x (0) 0.
x (t ) ( x (t ) 1)u(t ),
x (1) 1; u(t ) t 2 .
x u 2 (t ) / x 4 (t ),
x (0) 0; u (t ) t.
№5.11 Дослідити на стійкість стан рівноваги.
1)
x (t ) x 2 4 x 5 .
2)
3)
x (t ) x 2 1.
x (t ) ( x 2 4 x 5)t .
4)
x (t ) 1 x 2 .
5)
x (t ) x 2 4 .
6)
x (t ) (4 x 2 )t .
7)
x (t ) ( x 2 16)et .
8)
x (t ) x 2 x 2 .
9)
x (t ) x 2 9 .
10)
x (t ) 9 x 2 .
11)
x (t ) ( x 2 4 x 5)t .
48
12)
x (t ) x 2 4 x 5 .
13)
x (t ) x 2 1x 6 .
14)
x (t ) x 2 4 x 4 .
15)
x (t ) x 2 4 x 4 .
16)
x (t ) ( x 1)3 .
17)
x (t ) x 2 6 x 8.
18)
x (t ) x 2 4 x 5 .
19)
x (t ) ( x 2 5x 6)et .
20)
x (t ) ( x 2 2 x 1)t .
49
3 ДОДАТКОВІ РОЗДІЛИ ТЕОРІЇ МАТРИЦЬ
3.1 Базові поняття та визначення теорії матриць
3.2 Матриці і операції над ними
Прямокутна таблиця елементів, що має m рядків і n
стовпців, називається m n -матрицею. Якщо n m , то матриця
називається квадратною, а число n m - її порядком. m n матриця позначається прописною напівжирною буквою,
наприклад A . Елементи матриці A позначаються aij , де перший
індекс i вказує на номер рядка, до якої належить елемент, а
другий індекс - номер стовпчика. Матрицю можна визначити
співвідношенням
a11 a12 a1n
a
a 22 a 2 n
21
, або A aij
A
a m1 a m 2 a mn
,
де квадратні дужки позначають таблицю із загальним елементом
aij .
n 1 називається матрицеюМатриця розмірністю
стовпцем, вектором - стовпцем, n-вектором, або просто
вектором. Вектори позначаються малими напівжирними
літерами, наприклад а. Вектор, таким чином, можна представити
у вигляді
a1
a
a 2
a n
Визначимо деякі матриці спеціального виду. Квадратна
матриця порядку n називається діагональною матрицею, якщо
aij 0 при будь-яких i j Вона іноді позначається як
diag (a11 , a22 ,, ann ) . Діагональна матриця порядку n, для якої
i 1 n ,
aij 1,
називається
одиничною
матрицею
(позначається E ). Матриця довільної розмірності, усі елементи
якої рівні 0. називається нульовою матрицею (позначається 0).
50
Добутком n m -матриці А на m r -матрицю В називається
n r -матриця С, для якої
m
cij aik bkj
k 1
для всіх i 1,2,, n і при всіх j 1,2,, r .
Приклад 6.1:Нехай
1 2
1 0 1
3 2 1
і
то
A
B
C
A
B
1 1 1
0 1 2
1 1
Зауважимо, що у визначенні добутку матриць суттєвим
виявляється порядок множення.
1 3
2 1
Приклад 6. 2: Розглянемо дві матриці A
і B 1 1 .
2
4
5 4
4 7
Добуток АВ дорівнює AB
, а добуток ВА, BA 3 4
5
3
видно,що AB BA .
Дві n n -матриці називаються комутуючими, якщо АВ
дорівнює ВА.
Дві матриці можна помножити тільки, якщо число стовпців
першої матриці дорівнює числу рядків другої.
Нехай задані n m -матриця А і число α. Добуток матриці на
число - αА є n m -матриця С, для якої cij aij при всіх i 1 n і
при всіх j 1 m .
Дві m n -матриці A aij і B bij називаються рівними
тоді і тільки тоді, коли aij bij при всіх при всіх i 1 n і при всіх
j 1 m . (Зауваження: рівність матриць визначена тільки для
матриць однакового розміру.)
Сумою двох m n -матриць A aij і B bij називається
m n -матриця C A B для якої cij aij bij при всіх i 1 n і
при всіх j 1 m .
Для будь-якої квадратної матриці А справедлива тотожність
A E E A A.
Для будь-якої m n -матриці А справедлива тотожність
A 0 0 A A.
51
Для матричних операцій справедливі наступні властивості,
які досить легко виводяться.
Дистрибутивність
(A B)C AC BC
де А і В є n m -матриці, С є m r -матриця;
A(B C) AB AC ,
де А є n m -матриця, В і С є m r -матриці;
( )A A A ,
де і - числа;
( A B) A B ,
де - число, А і В є n m матриці.
Асоціативність
A A і ( A )B AB A( B) ,
де А є n m -матриця, В є m r -матриця, - число;
A(BC) (AB)C ,
де А є n m -матриця, В є m r -матриця, С є r s -матриця;
(A B) C A (B C)
де А, В і С є n m -матриці.
Комутативність
A B B A,
де А і В є n m -матриці.
3.2.1 Визначники і обернена матриця
Якщо А-квадратна матриця порядку n, то визначник матриці
А ( det(A ) ) знаходиться за допомогою методу Лапласа
n
det( A) aij ij , або det( A) a ji ji
j i
для будь-яким i, або j де ij - алгебраїчне доповнення елементу
aij .
Алгебраїчне доповнення елемента aij визначається як
ij ( 1) i j M ij де M ij - мінор елемента aij , тобто визначник
квадратної матриці, отриманої з
А викреслюванням
52
i-го рядка і j-го стовпця.
Визначник квадратної матриці порядку 1 дорівнює .
Визначник квадратної матриці порядку 2 позначається
a12 a11 a12
a
det 11
a11a22 a12 a21 .
a
a
a
a
21
22
21
22
Визначник квадратної матриці порядку 3 визначається за
допомогою наступного співвідношення:
a11 a12 a13
a
a23
a
a23
a
a22
a21 a22 a23 a11 22
a12 21
a13 21
.
a32 a33
a31 a33
a31 a32
a31 a32 a33
Можна показати, що якщо А і В - квадратні матриці порядку
n, то
det( AB ) det( A ) det( B) .
(6.3)
Матриця В, яка задовольняє співвідношення A B B A E
називається матрицею, оберненою до матриці А, і позначається
A 1 . Вона обраховується як
A 1 ji .
(6.4)
З (6.4) випливає,що матриця A 1 існує тоді і тільки тоді, коли
det( A ) 0 , тобто коли матриця А є невироджена.
Мінором порядку р довільної n m -матриці А є визначник
довільної p p -підматриці матриці А.
Приклад 6.3:Нехай A є 3 4 -матриця
1
2 3
1
A 3
1 1 0
2 1 1 5
Одним з мінорів другого порядку буде
1 3
det
11 ,
2
5
а мінором третього порядку
2 3
1
det 3 1 0 32 .
2 1 5
53
Рангом матриці називається максимальний порядок
відмінних від нуля мінорів цієї матриці. Якщо r-ранг прямокутної
матриці А розміру n m , то, очевидно, r min( n, m) .
Приклад 6.4: Нехай задана матриця A
1 1 2
A 2 1 4 .
3 0 6
Так як det( A) 0 , то ранг матриці А менше 3. Оскільки один з
1 1
мінорів дорівнює det
1 , то ранг матриці A дорівнює 2.
2
1
Приклад 6.5: Задана прямокутна матриця
1 2 1
A
1 1 1
Так як існує мінор другого порядку,
не рівний нулю
1 1
det
2 то ранг матриці А дорівнює 2.
1
1
Квадратна матриця порядку n є невиродженою тоді і тільки
тоді, коли її ранг дорівнює її порядку.
Приклад 6.6: Розглянемо матрицю третього порядку
1
A2
1
Так як det( A ) 4 то ранг матриці
зворотна матриця
1
4
1
1
A
2
1
4
2 1
1 0
0 1
А дорівнює 3, і тому існує
1
1
2
4
1
0
2
1
3
2
4
Транспозицією n m -матриці A [aij ] називається m n 54
матриця A [a ji ] (тобто матриця A отримується в результаті
заміни стовпців матриці А на її рядки).
Приклад 6.7: Розглянемо 2 3 -матрицю
1 3 2 i1
A
,
9
4
.
2
0
її транспозицією буде 3 2 -матриця
9
1
A 3 4.2 .
0
2 i1
0.5
Транспозицією вектора a 15 є матриця a 0.5
i 3
15 i 3 .
Транспозиція володіє наступними властивостями, які легко
довести
(A B) A B ,
де А і В є n m -матриці;
(AB)' BA ,
де А є n m -матриця, В є m r -матриця.
Якщо А і В – невироджені квадратні матриці, то справедливо
(AB)1 B1A1 ,
(A1 )1 A ,
(A1 ) (A)1 .
3.3 Лінійний векторний простір
3.3.1 Основні поняття і визначення
Для виконання операцій над векторами слід ввести поняття
лінійного векторного простору. Попередньо дамо визначення
поля.
Полем є будь-яка множина чисел, що містить суму,
різницю, добуток, ділення (якщо дільник не дорівнює нулю)
55
будь-яких двох чисел з поля.
Наприклад, полем є множина дійсних чисел, множина
раціональних чисел, а також множина комплексних чисел.
Множина векторів L називається лінійним векторним
простором, якщо для будь-яких двох векторів визначена операція
додавання і для будь-якого вектора визначена операція множення
на елементи із поля Ф (множення на число), при здійсненні
наступних аксіом.
Додавання.
При будь-яких f L і g L
f gL.
Крім того,
1) f g g f – комутативність;
2) (f g ) h f (g h) – асоціативність;
3) існує елемент 0 L такий, що f 0 f ;
4) для будь-якого f L існує протилежний елемент g L ,
такий, що f g 0 .
Множення на число.
Для будь-якого вектора f L і будь-якого скаляра
f L
Крім того,
5) (f ) ()f – асоціативність;
6) ( )f f f і (f g ) f g – дистрибутивність;
7) існує одиничний елемент 1 , такий, що 1f f .
Одним з найпростіших прикладів векторного простору множина впорядкованих пар дійсних чисел
x (1 , 2 ) , 1 R1 , 2 R1
Геометричним поданням такого лінійного векторного простору є
площина - R 2 (двовимірний евклідовий простір).
Аналогічно множина впорядкованих трійок дійсних чисел
x (1 , 2 , 3 )
1 R1 , 2 R1 , 3 R1
є тривимірним простором і записується у вигляді
R 3 R1 R1 R1 R 2 R1 .
Комплексний двовимірне простір - це простір впорядкованих
пар комплексних чисел, тобто
56
2 1 1
Множина дійсних чисел є лінійним векторним простором. З
його допомогою будується двовимірний лінійний векторний
простір. Аналогічно можна побудувати двовимірний векторний
простір функцій за допомогою одновимірного лінійного
векторного простору функцій.
Приклад 6.8: Приклади лінійних векторних просторів, які
часто зустрічаються :
1) L1 (T ) - множина всіх вимірюваних дійсних функцій, які
абсолютно інтегруються на відрізку T, тобто
f L1 (T ) f (t ) dt
T
2) L2 (T ) - множина всіх дійсних вимірюваних функцій з
абсолютно інтегрованим на відрізку T квадратом
1
2
2
f L2 (T ) f (t ) dt ;
T
3) LP (T ) - множина всіх вимірюваних дійсних функцій, р степінь яких абсолютно інтегрується на відрізку T
1
p
P
f LP (T ) f (t ) dt ;
T
4) L (T ) - множина всіх вимірюваних дійсних функцій, верхня
межа яких (або верхня межа - абсолютний максимум, якщо він
існує) на відрізку Т скінченна, тобто
f L1 (T ) sup f (t ) .
tT
Таким чином, отримуються наступні n-мірні лінійні векторні
простори функцій:
L1n (T ) L1n1 (T ) L1 (T ) ,
Ln2 (T ) Ln21 (T ) L2 (T ) ,
Lnp (T ) Lnp1 (T ) L p (T ) ,
Ln (T ) Ln1 (T ) L (T ) , n 2,3
Якщо розглянути сигнал виду
f ( f 1 , f 2 , , f n ) ,
то
57
f L1n (T ) f k L1 (T ) ,
f Ln2 (T ) f k L2 (T ) ,
f Lnp (T ) f k Lp (T ) ,
f Ln (T ) f k L (T ) , k 1,2, , n .
У загальному випадку ці n-мірні векторні сигнали
представляються точками (або просто сигналами) у просторі
сигналів за аналогією з векторно-точковим ізоморфізмом, який
має місце в звичайному евклідовому просторі. Для простоти
припускається, що всі можливі властивості n-мірних векторних
сигналів, з якими маємо справу, базується на умові
f F ,
або у більш явному вигляді
f (t ) : t T F n
тобто функціональний простір F n містить всі сигнали, які ми
повинні розрізняти.
3.3.2 Метрика і норма
При вивченні систем у багатьох випадках необхідно мати
деяку скалярну міру, яка показує відмінність двох векторних
величин. Наприклад, коли два вектори (точки) співпадають
можна вважати, що відстань між ними дорівнює нулю. Хоча
поняття відстані є інтуїтивно ясним, необхідно для його
ефективного використання дати точне визначення.
Відстань (ξ, η) між двома векторами ξ і η задається за
допомогою метрики , яка задовольняє наступним
аксіомам:
1) (ξ, η) 0 тоді і тільки тоді, коли ξ η, (ξ, η) 0 для
будь-яких ξ і η ;
2) (ξ, η) (ξ, η) (симетричність);
3) (ξ, η) ( η, λ ) (ξ, λ ) (нерівність трикутника).
Нехай ξ і η – вектори простору R 2 тобто
ξ 1 і η 1
2
2
Тоді звичайна відстань визначає метрику
2 (ξ, η) (1 1 ) 2 (2 2 ) 2 .
58
Аксіоми, очевидно, виконуються. Однак можна ввести і
інші метрики, наприклад
1 (ξ, η) 1 1 ) 2 2 ,
або
(ξ, η) max{ 1 1 ) , 2 2 }
В деяких випадках вони зручніші.
Легко бачити, що 1 і задовольняють всім необхідним
аксіомам.
Приклад 6.9: Обчислимо метричну відстань між трьома
векторами двовимірного дійсного простору для кожної з
приведених вище метрик
Отримуємо
1
2
1
ξ , η , ν 1
4
3
0
2 (ξ, η) 50 ,
2 (ξ, ν ) 20
і
2 ( η, ν ) 18 ;
1 (ξ, η) 8 ,
1 (ξ, ν) 6 ,
і
1 (η, ν) 6 ;
(ξ, η) 7 ,
(ξ, ν) 4 ,
і
( η, ν) 3 .
У кожній із цих метрик можна визначити одиничне
«коло» як множина всіх точок, відстань яких (ξ,0) від
початку координат дорівнює 1 (рис.6.1).
Введені вище поняття повністю поширюються на випадок
комплексного простру n , хоча в цьому випадку вони не так
наглядні.
З допомогою поняття відстані можна визначити довжину
вектора.
Рисунок 6.1 - Одиничне коло з центром у початку
59
координат для метрик 1 , 2 і у дійсній площині
Нехай ξ комплексний n -вимірний вектор
ξ
1
2
...
.
n
Нормою вектора ξ (або його «довжиною») називається відстань
від точки ξ до початку координат.
Норма вектора ξ позначається ξ . Поняття норми можна
вести аксіоматично в більш загальних векторних просторах ніж
n
Лінійний векторний простір L називається нормованим
якщо кожному вектору f L можна поставити у відповідність
невід’ємне число f – норму, яке задовольняє наступним
властивостям:
1) f 0 тоді і тільки тоді, коли f 0 ;
2) f f ;
3) f g f g
Зокрема, в просторі n можна ввести наступні норми:
n
норму
l1n
норму
l
n
2
норму
ln
ξ 1 k ;
k 1
ξ2
n
2
k ξ 'ξ ;
k 1
ξ max{ k } .
k
Лінійний векторний простір розглядається у відповідності з
даною нормою; тому ми маємо l1n -простір, l 2n -простір, l n -простір
та інші. У нормованому просторі можна ввести метрику за
формулою
(ξ, η) ξ η .
Всі аксіоми метрики очевидно виконані. Звичайно, норма l 2n
є найбільш природною, метрика, що їй відповідна є звичайною
відстанню, проте в багатьох випадках норми l1n і l n є більш
60
зручними.
3.4 Розмірність і базис векторного простору
Набір векторів {x i }1k називається лінійно залежним, якщо
k
існують скаляри {сi } не все рівню нулю і такі, що сi x i 0 .
k
1
i 1
k
Вираз сi x i ще називають лінійною комбінацією векторів
i 1
k
i 1
{x } .
Множина векторів {x i }1k називається лінійно незалежними,
k
якщо із рівності сi x i 0 випливає, що
i 1
с1 с2 ... сk 0 .
Лінійний векторний простір L називається кінцевомірним, а
число n називається розмірністю простору, якщо існує n
лінійно незалежних векторів з L і любі n 1 векторів із L лінійно
залежні. Якщо простір містить скільки завгодно велике число
лінійне
незалежних
векторів,
то
він
називається
незкінченномірним.
Множина лінійно незалежних векторів {ξ i }1k лінійного
векторного простору L називається його базисом, якщо будьякий вектор x простору L можна представити лінійною
комбінацією цих векторів:
k
x ai ξ i , де a1 , a2 ,..., ak - числа.
i 1
Однозначно
визначення
числа
називаються
{xi }1n
координатами вектора x в базисі {ξ i }1n . І говорять, що вектор x :
n
заданий у базисі {ξ } , якщо x xi ξ i
n
i 1
i 1
3.5 Лінійні перетворення
Під Е n будемо розуміється або дійсний простір R n або
комплексний простір n .
Перетворенням T називається оператор що відображає
простір Е n в простір Е m :
n
m
T :Е Е
61
тобто перетворення зіставляє кожному n -вектору x Е n тільки
один m -вектор y Е n , що записується у вигляді y Tx .
Перетворення Т називається однозначним, якщо при будь-яких
x1 x2 то Tx1 Tx2 .
Перетворення T називається лінійним, якщо
βy b αy a T (βxb αy a )
де
y a Txa і y b Txb
для будь-яких комплексних чисел і
Лінійному перетворенню T : Е n Е m можна поставити у
відповідність m n -матрицю. Вірно і зворотне твердження, тобто
будь-яка n m -матриця визначає лінійне перетворення T .
3.6 Власні вектори і власні значення
З кожним лінійним перетворенням простору E n в себе можна
зв'язати деякі числові значення, що є інваріантами цього
перетворення і однозначно його визначаючим.
Множина М Е n називається лінійним підпростором, якщо
x x M
при любих x , x M x , для любих чисел і .
Приклад 6.10: Розглянемо евклідову площину. Нижче
перераховані всі можливі підплощини в R 2 :
1) початок координат (єдина точка);
2) будь-яка пряма, яка проходить через початок координат;
3) вся плоскість
Лінійні підплощини площини в R 3 :
1) вся площина.
2) будь-яка плоскість, яка проходить через початок
координат;
3) будь-яка пряма, яка проходить через початок координат
(очевидно вона є перетином двох площин, які проходять через
початок координат);
4) початок координат (єдина точка).
У комплексному просторі n лінійними площинами є
62
комплексні n 1 -вимірні гіперплощини, які проходять через
початок координат (їх розмірність над полем дійсних чисел рівна
2(n 1) ) і їх довільного перетину.
M En
Підпростір
називається
інваріантним
підпростором відносно перетворення T , якщо для любого
х M , Тх M
Відмітимо, що початок координат і весь простір Е n завжди є
інваріантними.
Розглянемо
одновимірні
інваріантні
підпростори
n -вимірного простору Е n . Наприклад, в комплексному просторі
n одновимірний комплексний підпростір визначається
фіксованим комплексним ненульовим вектором ξ з можливими
множниками (точніше, множина точок ξ , де пробігає
множину комплексних чисел, є одновимірним підпростором). В
дійсному n -вимірному просторі R n одновимірний підпростір - це
пряма, яка проходить через початок координат. Якщо ξ інваріантний підпростір лінійного перетворення T , то в силу
визначення інваріантного підпростору
Т (ξ) (ξ)
де - число (можливо комплексне ), яке залежить від .
Використовуючи
матричне
представлення
перетворення,
отримаємо
A(ξ) (ξ) ,
або
(А E)ξ 0 .
Так як зменшується в однорідному напрямку, величина
не залежить від , тому
Аξ ξ ,
або
( А E)ξ 0 .
Якщо ненульовий вектор ξ задовольняє цьому відношенню,
то йому задовольняє також вектор, отриманий добутком ξ на
будь-яке дійсне або комплексне число; відповідно, вектор ξ
визначає одновимірний інваріантний підпростір перетворення T ,
представленого у базисі {e1 , e 2 ,..., e n } матрицею А .
Нагадаємо, що рівність
63
( А E)ξ 0
у дійсності представляє систему лінійних однорідних
алгебраїчних нерівностей. Ця система має однозначний розв’язок
ξ при умові, що
det( А E) 0 .
Значення ξ 0 завжди є розв’язком такої системи рівнянь.
Інший розвязок буде не єдиним, тобто нетривіальне рішення ξ 0
в цьому випадку існує.
Визначимо характеристичний поліном як
q() det(A E) q0 q1 ... qnn
де q0 det( A ) і qn (1) n .
Корені характеристичного рівняння
називаються власними
числами) матриці A .
q() 0
значеннями
(характеристичними
З основної теореми алгебри випливає, що характеристичне
рівняння
q0 q1 ... qn n 0
має n коренів (деякі з яких можуть збігатися і деякі з яких
можуть бути комплексними). Кожному власному значенню з
набору
{1 , 2 ,..., n }
відповідає елемент з множини власних векторів
{ξ1 , ξ 2 ,..., ξ n }
причому рівні власні значення можуть відповідати рівним
власним векторам, тобто власний вектор ξ k є деяким ненульовим
розв’язком рівняння
(А k E)ξ k 0
Відмітимо, що ці розв’язки не однозначні; оскільки рівняння
однорідні, помноживши розв’язки на довільний скалярний
множник, знову отримаємо розв’язки.
Приклад 6.11:
визначає матрицю
Розгледимо
64
лінійне
перетворення,
яке
1
0
А
.
2
3
Його характеристичний поліном має вигляд
1 2
0
q( ) det( A E)
3 2 .
2
3
Власні числа, тобто корені характеристичного рівняння
2 3 2 0
будуть 1 1 і 2 2 .
Для знаходження власного вектора, відповідного значенню 1
розглянемо
(А 1E)ξ1 0 ,
або
1 11 0
1
2 2 0 .
21
Звідси
11 21 0 .
Один з розв’язків цього рівняння є
11 1 і 21 1,
тому власний вектор, відповідний власному значенню 1 1, має
вигляд
1
ξ1 .
1
Відзначимо, що цей власний вектор не єдиний; наприклад,
вектор
2
ξ1
2
також задовольняє рівнянню.
Розгледимо (А 2 E)ξ 2 0 , або
1 11 0
2
2 1 0 .
21
Отже
211 21 0 .
65
Можна припустити, 11 1 і 21 2 ,тобто власний вектор,
відповідний значенню 2 2 , рівний
1
ξ2 .
2
Відзначимо, що, хоча ці вектори не ортогональні, проте вони
утворюють базис простору, оскільки є лінійно незалежними.
Розглянемо приклад, в якому використовується комплексний
простір.
Приклад 6.12: Лінійне перетворення, що визначається
дійсною матрицею
cos sin
А
.
sin
cos
являє
собою
поворотом
дійсної
плоскості
довкола
точки 0 на кут . Його характеристичний поліном рівний
sin
cos
2
q( ) det
2 cos 1.
sin
cos
Власні значення, що отримуються з характеристичного
рівняння
2 2 cos 1 0 ,
рівні
1 cos i sin ei
і
2 cos i sin e i .
У загальному випадку власні значення є спряженими
комплексними числами.
Власні вектори для 1 cos i sin знаходимо із
співвідношення
i sin sin 11 0
sin i sin 0 .
21
звідки
11i sin 21 sin 0,
11 sin 21i sin 0.
Видно що перше рівняння отримується з другого множенням
на i . Задаючись 11 1 отримуємо 21 i . Аналогічно для
66
2 cos i sin із співвідношення
i sin sin 12 0
sin sin 0
22
знаходимо 12 1 і 22 i . Відповідні вектори мають вигляд:
1
1
ξ1 і ξ 2 .
i
i
Використання комплексного простору дозволяє представити
обертання за допомогою добутку. Нехай / 2 , тоді
0 1
А
.
1
0
Відмітимо, що вектори
i
1
iξ1 і 1
i
1
утворюють кут 90 (для цього слід розглянути їх координати).
Будь-який вектор можна розкласти в лінійну комбінацію
векторів ξ1 і ξ 2 з комплексними коефіцієнтами. В загальному
випадок можна розглянути окремо дійсну і уявну частини
власних векторів і вектори, в які вони перетворяться. Наприклад,
1
0
для вектора ξ1 Re{ξ1} і Im{ξ1} ;
0
1
ei
cos
sin
i
i
Im{
e
ξ
}
Для e ξ1 i Re{e iξ1}
,
1
cos .
sin
ie
Видно, що у загальному випадку обертання в двовимірній
площині можна представити як добуток на комплексне число в
двовимірній комплексній площині. Всі відповідні пари векторів
відрізняються на кут в двовимірній дійсній площині. Ці
поняття
легко
узагальнюються
на
випадок
n -вимірної комплексного простору, оскільки
n -вимірне
обертання можна виразити через послідовні двовимірні
обертання.
Введення комплексного простору не дозволяє отримати
додаткової інформації про дійсну матрицю А , але приводить до
деяких спрощень, оскільки всі операції можна виразити через
добуток.
Довжина власних векторів визначена неоднозначно, тобто
67
якщо виконана рівність
(А E)ξ 0 ,
то вірна також рівність
(А E)(kξ ) 0 ,
де k - довільне комплексне число. Деяку невизначеність можна
усунути, нормалізуючи власні вектори. Множина нормалізованих
власних векторів будується по формулах
ek
1
*k k
ξk
(k 1,2,...,n) ,
(де * позначає комплексне спряження і транспозицію); тоді
e*k e k 1 . Проте вибір довжини визначає власні вектори все ще
неоднозначно, так, якщо e k - власний вектор одиничної довжини,
то e ie k - також власний вектор одиничної довжини ( - довільне
дійсне число).
Нижче передбачається, що власні значення 1 , 2 ,..., n різні,
так що множина відповідних власних векторів {ξ 1 , ξ 2 ,..., ξ n }
лінійно незалежна і, отже, утворює базис простору Е n .
3.7 Приведення матриці до діагонального вигляду
Розгледимо матричне співвідношення
Ах y .
Нехай {ξ 1 , ξ 2 ,..., ξ n } - базис власних векторів, що відповідають
різним власним значенням 1 , 2 ,...,n . Припустимо, що в цьому
базисі
x~
x1ξ1 ~
x2ξ 2 ... ~
xnξ n
і
y~
y1ξ1 ~
y2ξ 2 ... ~
ynξ n .
Тоді співвідношення
Ах у 0
перетвориться до вигляду
( ~
x~
y )ξ ( ~
x~
y )ξ ... ( ~
x~
y )ξ 0 .
1
1
1
2
2
2
n
n
n
Оскільки власні вектори лінійно незалежні, то
k ~
xk ~
yk 0 (k 1,2,...,n) .
Якщо матриця A невироджена, тобто якщо det(A) 0 , то
68
перший член характеристичного рівняння не дорівнює нулю,
тому
k 0
(k 1,2,...,n) ,
і координата ~x k просто представляється через координату ~y k :
1
~
xk ~yk .
k
Тому в базисі власних векторів лінійне перетворення T ,
якому відповідає матриця
A в первинному базисі,
представляється матрицею
1 0 0 0
0
0 0
2
,
Λ
0 0 3 0
0 0 0
n
або
Λ diag (1 , 2 ,..., n ) .
Розглянемо матричне відображення Ах y у припущенні,
що базис довільний. Побудуємо матрицю S , стовпцями якої є
лінійно незалежні власні вектори в цьому довільному базисі:
ξ
S 1
ξ2 ξn
.
Тоді вектор x в базисі власних векторів має вигляд
~
x S1x , або x S1~
x.
Оскільки власні вектори лінійно незалежні, то матриця S
1
невироджена. Тепер розглянемо рядки матриці S як вектори:
η
1
η
S 1 2
ηn
вектори η k утворюють базис, який називається взаємним.
1
Оскільки SS E то
0, якщо k l ,
η'k ξ l
1, якщо k = l .
Отже, якщо в базисі власних векторів ξ1 , ξ 2 ,, ξ n вектор x
представляється у вигляді
69
x ~x1ξ1 ~x2ξ 2 ~xnξ n
то
η1
η
1
~
xS x 2
η
n
x1
~
~
x2
~
~
~
x1ξ1 x2ξ 2 xn ξ n .
~
xn
x . Аналогічно, якщо
тобто S 1 x дає шукане представлення ~
y~
yξ ~
y ξ ~
yξ
1 1
2
2
n
n
то
η1
η
1
~
y S y 2
η
n
y1
~
~
~
y2
~
~
y1ξ1 y2ξ 2 yn ξ n
~
yn
.
Матричне співвідношення (6.8) перетвориться у новому
базисі до вигляду
AS ~x S~y ,
або
S 1 AS ~
x~
y.
Розглянемо спочатку
ξ ξ 2 ξ n 1ξ1
AS A 1
1 0
ξ1 ξ 2 ξ n 0 2
0 0
2ξ 2 n ξ n
0
0
SΛ,
n
де Λ diag1 , 2 ,, n .
Звідси справедливі співвідношення
S1AS S1SΛ Λ .
Таким чином, в базисі власних векторів ξ1 , ξ 2 ,, ξ n матриця
лінійного перетворенням T є діагональною.
70
Приклад 6.13: У прикладі 6.10 ми визначили, що власні
значення матриці
1
0
A
2 3
рівні
1 1, 2 2 ,
а власні вектори є
1
1
ξ1 і ξ 2
1
2
Матриці S і S 1 в тому разі відповідно рівні
1
1
2 1
1
S
S
і
1 1
1 2
Отже.
1 1
1 1 0
2 1 0
S 1AS
2 3 1 2 0 2
1
1
3.8 Теорема
матриць
Келі-Гамільтона
і
функції
квадратних
3.8.1 Теорема Келі-Гамільтона і її наслідки
Теорема 6.6 (Теорема Келі - Гамільтона) Будь яка квадратна
матриця порядку n задовольняє своєму характеристичному
рівнянню. Тобто якщо
detA E q q0 q1 qnn ,
то
(6.10)
qA q0E q1A qn An 0 ,
де E A 0 .
Наслідки теореми Келі – Гамільтона.
Любій додатній цілий степінь k n квадратної матриці A
розмірністю n n можна представити лінійною комбінацією
перших n 1 степенів матриці A .
Визначення 6.31. Любий від’ємний степінь квадратної
матриці A розмірністю n n можна представити лінійною
комбінацією перших n 1 степенів матриці A .
71
3.8.2 Функції від квадратної матриці.
Припустимо, що задана скалярна функція f t і ми хочемо
отримати відповідну n n -матричну функцію f A квадратної
матриці A порядку n . Наприклад, якщо f t -поліном. то f A сума з такими ж коефіцієнтами відповідних степенів матриці A .
Перш за все визначимо функцію від матриці, коли f A
розкладається в степеневий ряд, тобто
1
fk Ak
k 0 k!
f A
де f t має такий же степеневий ряд
1 k
fkt
k 0 k!
f t
у припущенні, що матричний ряд сходиться. Тому f A існує,
якщо існують f k при k 1n Використовуючи теорему Келі
- Гамільтона, можна спростити обчислення матричної функції.
Оскільки по припущенню функція f A розкладається в
нескінченний ряд по ступенях матриці A , її можна представити
як кінцеву суму виду
n 1
f A k A k
k 0
n невідомих коефіцієнтів а цьому виразі, можна визначитиз
сіввідношення
n 1
i ik f ( k ),
k 1n .
i 0
Фактично отримано n рівнянь від n змінних 0 , 1 ,, n 1
які можна представити матричним рівнянням:
1
1
1
1
21
2
22
n
n
2
n11 0 f 1
n21 1 f 2
nn1 n 1 f n
яке має розв’язок, якщо визначник Вандермонда (визначник
квадратної матриці порядку n в лівій частині рівняння)
відмінний від нуля. Визначник Вандермонла відмінний від нуля
тоді і тільки тоді, коли власні значення різні (що і
72
передбачається).
Проілюструємо розглянуті в цьому розділі поняття і метод
обчислення функції e At .
Приклад 6.14:Матриця
1
0
A
2 3
має власні значення 1 1, і 2 2 (приклад 6.10). Необхідно
обчислимо функцію f A A1 .
Оскільки порядок матриці A дорівнює 2 маємо
A 1 0 E 1A .
Коефіцієнти 0 i 1 знаходяться з співвідношення
1 1 0 f 1
1 f ,
2 1
2
звідси, після підстановки
1 1 0 1
1 2 1 / 2
1
можна знайти 0 3 / 2, 0 1 / 2 отже
1 3 / 2 1 / 2
3 1 0 1 0
A 1
.
0
2 0 1 2 2 3 1
Відмітимо, що коефіцієнти 0 і 1 , можна перевірити з
допомогою характеристичного полінома
q 2 3 2
оскільки
0
q1
3
і
q0
2
1
q2
1
,
q0
2
таким чином
A 1
1
q11 q2 A
q0
Приклад 6.15:Матриця
73
1 2
A
2 1
має власні значення 1 1і 2 3 (приклад 6.11). Необхідно
обчислимо функцію f A A1 .
Коефіцієнти 0 i 1 знаходяться з співвідношення
1 1 0 1
1 3 1 / 3 ,
1
звідки 0
1
2
і 1 отже
3
3
2 1 0 1 1 2
A 1
,
3 0 1 3 2 1
або
2
1
3
A 1 3
2
1
3
3
Тут також результат можна перевірити за допомогою
характеристичного полінома
q 3 2 2
звідки
0
q1
q 1
2
і 1 2 .
q0
3
q0 3
Приклад 6.16 Матриця
cos sin
A
sin cos
має власні значення 1 e i і 2 e i (приклад 6.12).
Коефіцієнти 0 i 1 знаходяться з співвідношення
1 e i 0 e i
1 e i e i
1
74
звідки 0 2 cos і 1 1 . Отже
1 0 cos sin cos sin
A 1 2 cos
0 1 sin cos sin cos
Перевірка результату за допомогою характеристичного
полінома:
q( ) 1 2 cos 2 ,
a0
q1
2 cos ,
q0
a1
q2
1.
q0
Приклад 6.17:Обчислимо функцію f ( A ) e At для
1
0
A
2 3
де З теоремі Келі – Гамільтона
f ( At ) e At 0 (t )E 1 (t )A .
В цьому випадку коефіцієнти є функціями аргументу t . З
проведених раніше обчислень отримуємо 1 1, і 2 2
(приклад 6.10)
t
1 1 0 (t ) e
1 2 (t ) e 2 t
1
звідки
0 (t ) 2e t e 2t і 1 (t ) e t e 2 t .
Отже
0 1
1 0
t
2 t
e At ( 2e t e 2 t )
(
e
e
)
2 3,
0
1
звідки
2e t e 2 t
e
t
2 t
2e 2e
At
або інакше
75
e t e 2 t
,
e t 2e 2 t
1 2 t 1 1
2
e At e t
e 2
,
2
1
2
Відмітимо, що матриці в останній рівності мають вигляд ξ1η1
і ξ 2 η2 . Дійсно в загальному випадку отримуємо співвідношення
e At e t ξ1 η1 e t ξ n ηn ,
n
1
де ξ 1 , ξ 2 , , ξ n – власний базис, η1 , η2 , , ηn – взаємний базис
(все це справедливо, якщо власні значення різні).
Якщо розкласти матрицю A
A SΛS 1
то
f ( A) Sf ( Λ)S 1 Sdiag ( f (1 ), f ( 2 ),, f ( n )S 1 .
3.9 Випадок кратних власних значень
Може бути випадок, що квадратна матриця A порядку n має
кратні власні значення , які відповідає деякому одновимірному
інваріантному підпростору.
Приклад
6.18:
Матриця
2 1
A
0 2
має
характеристичне
рівняння
q() (2 ) 2 0
коренями якого 1 2 2 співпадають. Цьому власному
значенню відповідає тільки один власний вектор. Дійсно
0 1 ξ 1 0
0 0 ξ 0 ,
2
звідси
1
ξ1 ξ 2 .
0
Якщо ж ми розглянемо матрицю
76
2 0
A
,
0
2
що має таке ж характеристичне рівняння
q( ) ( 2 ) 2 0
і, отже, такі ж власні значення 1 2 2, то в цьому випадку
будь-який вектор простору є власним. Наприклад, вектори
1
0
ξ1 і ξ 2
0
1
утворюють базис простору.
У першому випадку можна додати до вектора ξ 1 будь-який
вектор
ξ2 1 ,
2
при умові ξ 2 0 , щоб отримати базис простору. Питання полягає
в тому, який з цих векторів самий підходящий.
Для цього вводиться поняття власного вектора.
Вектор ξ ek 0, , для якого
( A e E) k 1 ξ ek 0 ,
але
(A e E) k ξ ek 0 ,
називається узагальненим власним вектором рангу k , що
відповідає власному значенню e .
Приклад 6.19: Матриця
2 1
A
0 2
має одне власне значення 2 кратності 2 і один власний вектор
1
ξ
0
Знайдений на основі визначення 6.32 узагальнений власний
вектор .З виразу
77
0 1 1 1
0 0 2 0
A Eν
знаходимо
0
ν
1
– один з можливих векторів, оскільки значення довільне. Слід
відмітити, що вектори ξ і ν утворюють базис двовимірного
простору.
У загальному випадку визначимо ланцюг узагальнених
власних векторів, ξ k1 , ξ k2 , , ξ kl відповідних власному значенню
k кратності l , співвідношеннями
A Eξ
A Eξ
A Eξ
k
k1
0,
k
k2
ξ k1 ,
k
k3
ξk2 ,
.......... .......... .........
A Eξ
k
kl
ξ kl 1 .
Відмітимо, що якщо інваріантний підпростір, відповідний
власному значенню k , має розмірність m то може існувати m
таких ланцюгів різної довжини. Ми можемо доповнити лінійно
незалежні власні вектори, що відповідають різним власним
значенням, узагальненими власними векторами, отриманими з
таких ланцюгів.
Приклад 6.20: Розглянемо матрицю
2 1
A
0 2
яка має кратні власні значення 1 2 2 , один власний вектор
1
ξ1
0
і один узагальненим власний вектор
0
ξ2
1
Доведемо, що іншого узагальненого власного вектора немає.
78
Дійсно, його існування означало б, що
0 1 ξ 13 0
0
0
ξ 23 1
З цього співвідношення випливає, що E 0 , тобто отримана
суперечність. Отже, ланцюжок обривається.
Надалі ми передбачаємо, що власні вектори, доповнені
узагальненими власними векторами утворюють базис в просторі
En.
По аналогії з випадком різних власних чисел можна
спробувати привести матрицю з кратними характеристичними
числами до деякої канонічної форми. За допомогою власних і
узагальнених власних векторів побудуємо матрицю
ξ
S 11
ξ 12 ξ 1k1
ξ 21
ξ 22 ξ 2k 2
ξ l1 ξ l2 ξ lkl
де k1 k2 kl n . Відмітимо, що матриця S невироджена.
Матриця S 1 AS не є діагональною у загальному випадку, і має
наступний вигляд:
J 1 0 0 0
0 J
0 0
2
1
,
J S AS
0 0 0 J
l
де J m – квадратна матриця порядку k m вигляду
m 1 0 0
0
1 0
m
0 0 m
0
Jm
0
0 0 0
0 0 0
0
0
0
0
0
0
m 1
0 m
0
Слід відзначити, що дві різні «жорданові клітки» можуть
відповідати одному і тому ж власному значенню. Це пов'язано з
розмірністю інваріантного підпростору, яка визначається
співвідношенням
(A E)ξ 0
79
Приклад 6.21: Розглянемо матриці
2 0 0
2 1 0
2 1 0
A 0 2 0 , B 0 2 0 , C 0 2 1 .
0
0
2
0
0
2
0
0
2
Всі вони мають тільки одне власне значення 2 .
A отримуються
Власні вектори для матриці
співвідношення
з
0 0 0
( A E)ξ 0 0 0ξ 0 .
0 0 0
Зокрема, можна вибрати наступні три лінійно-незалежних
вектора:
1
ξ 1 0 ,
0
0
ξ 2 1 ,
0
0
ξ 3 0,
1
що задовольняють попередньому співвідношенню. Звідси
випливає, що розмірність інваріантного підпростору рівна трьом,
і ми отримуємо три жорданові клітки порядку 1. Дійсно,
2 0 0
J S 1 AS 0 2 0 .
0 0 2
Знайдемо власні вектори матриці B :
0 1 0 11
( B E)ξ 0 0 0 21 0. .
0 0 0 31
Отже, ξ 21 0 , а ξ 11 і ξ 31 можна вибрати будь-якими, при
цьому існують два лінійно-незалежних власних вектора,
наприклад
1
ξ 1 0
0
і
80
0
ξ 2 0 .
1
В цьому випадку отримуємо дві жорданові клітки (одну
порядку1 і одну порядку 2). Для знаходження узагальненого
власного вектора розглянемо
(B E) ν ξ 1
або
0 1 0 1 1
0 0 0 0 .
2
0 0 0 3 0
Тоді
2 1 ,
так що
ν 0 1 0 .
Покажемо, що це єдиний узагальнений власний вектор.
Дійсно, з виразу
(B E)~
ν ξ
1
або
0 1 0 ~ν1 0
0 0 0 ~ν 0 ,
2
0 0 0 ~ν3 1
слідує неможлива рівність
0 1.
Отже, матриця S , яка приводить матрицю A до жорданової
форми, є
ξ
S 1
1 0 0
ξ2
0 1 0 .
0 0 1
ν
Жорданова матриця має вигляд
2 1 0
J S 1 AS 0 2 0 .
0
0
2
Власні вектори для матриці C знаходяться з рівняння
81
0 1 0 11
(C E)ξ 0 0 1 21 0.
0 0 0 31
Легко бачити, що ξ 31 0 ξ 21 . Отже, існує тільки один
власний вектор, інваріантний підпростір одновимірний і існує
одна жорданова клітка порядку 3.
Легко показати, що матриця має два узагальнені власні
вектори
0
0
ξ 21 1 і ξ 31 0 ,
0
1
і жорданова канонічна форма має вигляд
2 1 0
J S 1 AS 0 2 1 .
0 0 2
Приклад 6.22: Знайдемо жорданову форму матриці
5 0 0
1
1
.
A i
5
4
2
0 0 5
Всі власні значення однакові 1 2 3 5 . Власні вектори
знаходяться із співвідношення
5 0 0 ξ1
1
1
( A E)ξ i
5
ξ2 0 .
4
2
0 0 5 ξ 3
Тому величини
1
1
i ξ1 ξ 3
4
2
і ξ 2 довільні. Інваріантний підпростір
породжується векторами
82
двовимірний
і
0
ξ 1 1 і
0
2i
ξ2 0 .
1
Єдиний узагальнений власний вектор визначається з виразу
( A E) ν ξ1 ,
або
0 0 0 1 0
1
1
i
0
4
2 1 .
2
0 0 0 3 0
Отримуємо
1
1
i 1 3 1 ,
4
2
і узагальнений власний вектор дорівнює
2i
ν 0 ,
1
чого і слід було чекати. Матриця S має вигляд
0 i 2i
S 1 0 0 ,
0 1 1
так, що
0
1
0
1
1
1
S i 0
.
4
2
1
1
i
0
2
4
Звідки жорданова канонічна форма має вигляд
5 1 0
J S 1 AS 0 5 0 .
0
0
5
83
Таким чином, матриця з кратним власним значенням може
мати більше, ніж одну жорданову клітку, відповідну цьому
власному значенню. Насправді, якщо розмірність спільного
розв’язку ξ рівняння
(A E)ξ 0
дорівнює r , то є r жорданових кліток, відповідних власному
значенню . Ми не доводитимемо це твердження, оскільки
будуть запропоновані прості способи обчислення жорданової
форми.
Для випадку кратних власних значень рівняння, що
відповідають співпадаючим власним значенням, не є
незалежними, і для знаходження розв’язку слід провести
додаткове дослідження. Розгледимо два «близькі» власні
значення і . Тоді
f ( ) 0 1 ( ) n 1 ( ) n 1
і
f () 0 1 n 1n 1 .
Отже,
f ( ) f ( )
f ( )
0
і ми отримуємо співвідношення, незалежне від первинного
рівняння. У загальному випадку, якщо 1 – власне значення
кратності k , то, беручи перші k 1 похідну правої і лівої частин
рівняння
lim
f ( l ) 0 1 l n 1nl 1 ,
по , отримуємо додаткові k 1 рівняння. Зокрема, якщо
f ( A ) e At , маємо
e l t 0 (t ) 1 (t ) l n 1 (t )nl 1 ,
te l t 1 (t ) 22 (t ) l (n 1)n 1 (t )nl 2 ,
t 2 e l t 22 (t ) 63 (t ) l (n 1)(n 2)n 1 (t )nl 3 .
At
Приклад 6.23: Знайдемо функцію e де
84
2 0
A
.
0
2
Матриця A має одне характеристичне значення 2
кратності 2. Отже, e At 0 (t )E 1 (t )A , де 0 (t ) і 1 (t ) такі, що
e 2 t 0 (t ) 21 (t ),
2t
te 1 (t ),
звідси
0 (t ) (1 2t )e 2 t
1 (t ) te 2 t
Отже,
2 0
1 0
2t
e At (1 2t )e 2 t
te
0 2 ,
0
1
або
e 2 t
e
0
At
0
.
e 2 t
Слід відмітити, що, хоча значення 1 (t ) було знайдене, воно
не пригодилося, оскільки
0 (t ) e 2t 21 (t )
і член 1 (t ) скоротився при знаходженні остаточного розв’язку.
Це трапилося тому, що відповідний інваріантний простір
двовимірний. З розкладання
1
0
1 0
2t
2t
e At e 2 t
e
(
1
0
)
e
0
1(0 1)
0
1
витікає, що у якості власних векторів можна взяти вектори
1
0
ξ1 і ξ 2 .
0
1
At
Приклад 6.24: Знайдемо функцію e , де
2 1
A
.
0
2
Легко перевірити, що
85
2t
0 (t ) (1 2t )e 2 t і 1 (t ) te .
Отже,
2 1
1 0
2t
e At (1 2t )e 2 t
te
0 2 ,
0
1
або
e 2 t
e
0
At
1 t
te 2 t
2t
.
e
2t
e
0 1
Розгледимо розкладання у взаємному базисі
0 1 2 t 1
0
1
1 0
2t
2t
2t
e At e 2 t
te
e
(
1
0
)
e
(
0
1
)
te
0 0
0
1
0(0 1) .
0
1
Отже тут, власний вектор
1
ξ1
0
і узагальнений власний вектор
0
ξ2 .
1
Коли власні значення матриці A різні, у якості матриці
перетворення W бралась матриця власних векторів S , тоді
справедливо
S 1 AS Λ ,
де Λ diag ( 1 , 2 , , n ) . Для загального випадку, коли власні
значення можуть бути кратними, знову візьмемо S , де S – така
матриця, що
S 1 AS J ,
а J diag ( J 1 , J 2 , , J n ) – жорданова канонічна форма матриці
A отже,
e At Se Jt S 1 .
Jt
Розгледимо e :
86
e J t
0
Jt
e
0
1
0
eJ t
2
0
0
0 0
,
0 eJ t
0
m
де J k – жорданова клітка, тобто
1 0 0 0
0 1 0 0
.
Jk
0 0 0 0
Приклад 6.26: Якщо
2 0 0
A 0 2 0 ,
0 0 2
то
e 2 t
e At 0
0
0
e 2t
0
0
0 .
2t
e
Якщо
2 1 0
A 0 2 0 ,
0 0 2
то
e 2 t
e At 0
0
te 2 t
e 2t
0
0
0 .
2t
e
Якщо
2 1 0
A 0 2 1 ,
0 0 2
то
87
2t
e
e At 0
0
te
2t
e 2t
0
t 2 2t
e
2
te 2 t .
2t
e
3.10 Норма лінійного перетворення (норма матриці)
Розгледимо лінійне перетворення T : E n E n , де E n є
n -мірний нормований лінійний векторний простір. Нехай A –
матриця перетворення T в деякому базисі e1 , e 2 , , e n і x –
деякий вектор простору E n . Покладемо
y Ax .
Тоді y E n і норма вектора y визначена
y Ax .
Норма матриці визначається наступним виразом:
A inf : Ax x , для всіх x E n , де inf позначає
нижню границю. Можна перевірити, що таке визначення норми
матриці дійсно задовольняє аксіомам норми.
Очевидно справедливе співвідношення
Αx A x , для всіх x E n .
Визначення норми матриці через властивості норми можна
переписати у вигляді
x
A inf : A
, для всіх x E n
x
,
або у більш зручнішому вигляді
A inf : Ax , для всіх x E n , x 1,
або
A sup Ax ,
x 1
де sup означає верхню границю. Таким чином, норма A матриці
A є максимум довжин векторів y Ax , коли вектор x належить
сфері одиничного радіусу в просторі E n , тобто x 1.
88
3.11 Контрольны питання
Що таке:
1. Лінійні векторні простори. Метрика й норма.
2. Лінійна залежність і лінійна незалежність векторів.
Розмірність векторних просторів. Базис векторних просторів.
3. Перетворення лінійних векторних просторів. Оператор і
матриця перетворень.
4. Власний вектор, як одномірний інваріантний підпростір
перетворення.
5. Власні значення. Основні теореми зв’язку власних
значень і власних векторів.
6. Приведення матриць до діагонального вигляду.
7. Співвідношення матриць перетворення у різних базисах.
8. Теорема Келі -Гамільтона.
9. Наслідки теореми Келі -Гамільтона.
10. Функція від квадратної матриці - визначення й
інтерпретація.
11. Знаходження функції від квадратної матриці за
допомогою матриці Вандермонда.
12. Знаходження функції від квадратної матриці шляхом її
розкладу.
13. Випадок кратних власних значень. Узагальнені власні
вектори.
14. Жорданова форма. Вид Жорданових клітин у залежності
від розмірності інваріантного підпростору.
15. Знаходження функції від квадратної матриці у випадку
кратних власних значень.
3.12 Варіанти завдань до практичних занять
№6.1 Довести, що операції множення і додавання матриць
задовольняють властивості дистрибутивності.
№6.2 Обчислити добуток матриць:
1 1
1 2 1 6 0
1
2
1
4 6 1 2 2
;
0
1 1
1
1
1 1 0 3 1
89
2
1 ;
1
1 0 1
№6.3 Дана матриця A 0 1
2 .
1
1 2
Знайти:
а) A, det( A ), A 1 ;
б) власні значення матриці A ;
в) власні вектори матриці A .
№6.4 Задані матриці
5 1 3
4
A 8 0 1 , B 3
2
6
3
2
Знайти:
г) визначник матриць A , B і
д) B 1 , якщо вона існує, і B ;
е) AC і CA ;
ж) A(B C) і AB AC ;
з) ( AB ) 1 і ( AB) .
2 1
2 1 9
1 5 , C 0 2 1 .
8 6
3
8
4
C;
№6.5 Довести, що множина розв’язків системи лінійних
однорідних алгебраїчних рівнянь
a11 x1 a12 x2 a1n xn 0 ,
a21 x1 a22 x2 a1n xn 0 ,
am1 x1 am 2 x2 am n xn 0
є лінійним векторним простором.
№6.6 Довести, що множина розв’язків однорідного лінійного
диференціального рівняння (з довільними початковими умовами)
bn x n (t ) bn1 x ( n1) b1 x (1) (t ) b0 x(t ) 0
є лінійним векторним простором.
№6.6 Чи є множина розв’язків системи з двох лінійних
неоднорідних алгебраїчних рівнянь лінійним простором:
x1 2 x 2 3
,
2 x1 4 x 2 6
№6.7 Чи є множина розв’язків неоднорідного лінійного
90
диференціального рівняння (з довільними початковими умовами)
x(t ) x(t ) 1, 0 t ,
лінійним векторним простором.
№6.8 Довести, що кожне з наступних відношень визначає
метрику:
(ξ, η) (1 1 ) 2 (2 2 ) 2 ;
(ξ, η) 1 1 2 2 ;
(ξ, η) max 1 1 , 2 2 ,
де ξ 1 і η 1 .
2
2
№6.9 Довести, що кожне з наступних відношень визначає
норму:
ξ 1 ξ2 ξ2 ,
ξ 2 12 2
,
ξ max1 , 2 ,
де ξ 1 .
2
№6.10 Матриця лінійного перетворення A має вигляд
4 1 3
2 1 5
2
A 6 3 1 , і заданий вектор x1 4 .
0 1 4
9
2 5 1
Визначити x 2 1 , x 2 2 , x 2 , якщо x 2 Ax 1
№6.11 Довести, що визначник матриці Вандермонда з
різними власними значеннями не дорівнює 0.
№6.12 Для кожної із заданих нижче матриць A знайти власні
значення, власні вектори, узагальнені власні вектори, жорданову
канонічну форму і функцію e At :
91
2
0
A
0
0
1 0 0
2 0 0
;
0 2 1
0 0 2
5
1
0
A
0
0
0
1
1
1
0
3
1
1
0
0
4
0
1
0
0
4
1
0
0
0
3
0
0
0
1
0
0
1
.
1
1
3
№6.13 Задана матриця
1
1
1
3
3 5
A
4
3
8
15 10 11
Jt
Знайти жорданову форму J і функцію e .
1
4
.
4
11
№6.14 Задана матриця
1
0
0
A 0
0
0
0
1 0
0
0
1 0
0
0
0 5
0
0
0 0
2
1
0 0
0
2
0 0
0
0
0 0
0
0
0 0
0 0
0 0
0 0 .
1 0
2 0
0 3
Знайти:
а) жорданову канонічну форму J ;
б) функцію e Jt ;
в) визначити матрицю переходу S до базису, в якому A
перетвориться на J , і взаємний базис.
№6.15 Розкласти матрицю A на добуток виду A S1ΛS .
92
1)
4 2 1
1 3 1 ; 2)
1 2 2
5 4 0
3 1 0 ;
2 3 4
3)
3 1 1
0 2 1 ;
0 1 2
4)
5 1 1
0 4 1 ;
0 1 4
5)
6 2 1
1 5 1 ; 6)
1 2 4
3 1 1
2 2 1 ;
2 1 4
7)
2 0 1
1 1 1 ;
1 0 2
8)
2 1 0
1 2 0 ;
1 1 3
3 11 7
0 5 4 ;
0 1 1
9)
5 1 1
10) 2 4 1 ;
2 1 6
5 1 1
11) 2 4 1 ;
2 1 6
3 2 2
12) 2 1 2 ;
2 2 3
5 2 2
13) 0 5 0 ;
0 2 3
7 4 4
14) 2 3 2 ;
2 0 5
2 19 30
15) 0 5 12 ;
5
0 2
3 2 0
4 1 1
16) 2 1 0 ; 17) 2 4 1 ;
15 7 4
0 1 4
5 7 0
18) 3 1
0 ;
12 6 3
1 8 23
19) 0 5 7 ;
0 3 1
1 0 1
20) 2 2 1 ; 21)
0 5
0
4 1 0
22) 1 4 0 ;
1 1 5
5 9 7
23) 0 3 2 ;
0 2 1
1 1 16
0 1 1 ;
3
0 1
5 0 21
24) 21 2 16 .
1 0 1
№6.16 Знайти функції від матриці:
f1 ( A) A k
f 2 ( A) exp( At ) для випадку різних характеристичних чисел.
93
і
5
3 0
1) 3 2 5 ;
0 1
0
0
1
2 0
3 0
2) 6 3 4 ; 3) 3 4 4
0 5
0 1
7
0
0
2 0
4) 6 3 4 ;
7
0 5
1
3 0
5) 3 4 4 ;
0 1
0
1 0 4
6) 5 2 6 ;
0
0 3
0
2 0
7) 6 5 2 ;
4
0 3
1 0 5
8) 6 2 4 ;
0
0 3
2 0 4
9) 6 3 5 ;
0
0 6
4
1
4 0
4 0 4
3 0
10) 5 2 6 ; 11) 3 3 5 ; 12) 1 5 6 ;
0
0 3
0
0 6
0
0 6
1 0 5
13) 2 5 6 ;
0
0 6
5
4 0
14) 5 5 6 ; 15)
0
0 6
0
2 0
3 3 5 ;
1
0 5
1
6
0
1 0
2 0
5 5
16) 2 2 1 ; 17) 4 3 7 ; 18) 0 3 0 ;
0
0 4
0
0 8
1
2 4
2
6 3 3
1 0 1
3 0
19) 0 2 1 ; 20) 2 2 1 ; 21) 4 2 1 .
0
0 1
0
0 5
0 1
0
94
№6.17 Знайти функції від матриці:
випадку різних характеристичних чисел.
f ( A) exp( At ) для
5
0
1
3 0
2 0
3 0
1) 3 2 5 ; 2) 6 3 4 ; 3) 3 1 4 ;
0 3
0 2
0 1
0
7
0
0
2 0 4
2 0
1 0 5
4) 5 2 6 ; 5) 6 3 2 ; 6) 6 1 4 ;
0 2
0 3
0 1
0
4
0
4
2 0 4
4 0
4 0 4
7) 6 6 5 ; 8) 5 4 6 ; 9) 3 3 5 ;
0 6
0 3
0 3
0
0
0
5
1
4 0
5 0
1 0 5
10) 1 5 6 ; 11) 2 5 6 ; 12) 5 5 6 ;
0
0
5
0
0
6
0
0
1
0
1
6
3 0
1 0
2 0
13) 3 3 5 ; 14) 2 4 1 ; 15) 4 3 7 ;
1
0
5
0
0
4
0
0
2
0
5 5
6 3 3
5 0 1
16) 0 4 0 ; 17) 0 2 1 ; 18) 2 2 1 ;
2 4
0 6
0 5
1
0
0
95
2
3 0
19) 4 2 1 ;
0 0 2
1 0 5
4 3 3
20) 2 4 6 ; 21) 0 4 1 .
0 4
0 4
0
0
96
4 СИСТЕМИ ВИСОКОГО ПОРЯДКУ
4.1 Поняття простору станів
Є багато прикладів систем, які для яких притаманні декілька
входів і декілька виходів.
Приклад 7.1: Тіло з масою, зосередженою в точці, що ковзає
без тертя по проводі (рис.7.1). В якості вихідних характеристик
тут можуть бути дві величини – висота тіла над деяким
фіксованим рівнем і його швидкість вздовж проводу.
Рисунок 7.1 - Система з двома виходами: тіло з масою,
зосередженою в точці, що ковзає без тертя по дроту; висота і
швидкість тіла є вихідними характеристиками.
Приклад 7.2: Прикладом системи з багатьма входами
служить транзисторний підсилювач (рис.7.2). Як вхідні сигнали
цієї системи можна розглядати напругу джерела Е і напруга
змінного сигналу U.
Рисунок 7.2 - Система з багатьма входами: транзисторний
підсилювач.
Прикладом системи з багатьма входами і багатьма виходами
може служити також телевізійний приймач. Звукові і
відеосигнали (радіосигнали), а також напруга джерела живлення
є вхідними діями, а звукові сигнали і відеосигнали, що
поступають на кінескоп, втілюють реакцію системи.
У загальному випадку ми припускатимемо, що система має r
97
входів і m виходів. Для зручності r входів зображений r-мірним
вектором u (називатимемо його вхідним вектором або просто
входом), а m виходів – m-мірним вектором у (називатимемо його
вихідним вектором або просто виходом). Іноді ми писатимемо ці
вектори у вигляді u (t) і у (t), щоб підкреслити їх залежність від
часу. Таким чином
ut u1 t , u2 t ,..., ur t ,
aбо
y t y1 t , y2 t ,..., yn t .
Стан системи у момент t0 є інформація, яка разом з деякою
вхідною функцією, заданою для t t0 , адекватно визначає єдину
вихідну функцію при будь-якому t t 0 .
Стан системи може бути описаний n-мірним вектором x(t )
x(t ) x1 t , x2 t ,...xn t ,
n- компонент якого є змінними стани системи.
Система, для опису стану якої потрібні n змінних,
називатимемо системою n-го порядку.
Простором станів системи є простір, що містить вектори
х(t) при змінному t , тобто простір, в якому базисний вектор може
бути вибраний з багатьох векторів {х(t)}.
Існують системи, для вичерпного опису стану яких потрібна
нескінченна множина змінних. Прикладом системи такого типу
може бути одинична лінія затримки. Говорять, що такі системи
мають нескінченномірний простір станів. Про системи, для яких
може
бути
знайдене
представлення
через
стан
(скінченновимірний або нескінченномірний), говорять, що вони
допускають опис за допомогою простору станів.
Відмітимо, що відповідно до наших визначень знання
справжнього стану системи х(t) і теперішньої і майбутньої
вхідної дії u(t), t t0 достатнє для того, щоб знайти теперішній і
майбутні значення вихідних характеристики системи y(t), t t0 .
Отже, майбутні значення вихідної характеристики системи не
залежать від способу, яким система досягає свого теперішнього
стану. Іншими словами, можна стверджувати, що теперішній стан
системи відокремлює минулу поведінку від майбутньої поведінки
або що вся минула поведінка системи сконцентрована в її
98
теперішньому стані.
Якщо система допускає представлення за допомогою
простору станів і описується звичайними диференціальними
рівняннями, то рівняння стану можна звести до вигляду
x (t ) f (x(t ), u(t ), t ),
(7.1)
y(t ) g(x(t ), u(t ), t ),
(7.2)
де n-мiрна вектор-функція f і m-мірна вектор-функція g є
однозначними. Така форма представлення називаються
рівнянням стану у стандартній формі. Диференціальне
рівняння називається рівняннями стану, а – рівнянням вхідстан-вихід.
Для випадку лінійної системи рівняння (7.1) і (7.2) можна
представити сукупністю матричних рівнянь:
x (t ) A(t )x(t ) B(t )u(t ),
y(t ) C(t )x(t ) D(t )u(t ),
а для випадку лінійних стаціонарних систем
x (t ) Ax (t ) Bu(t ),
y(t ) Cx (t ) Du(t ).
(7.3)
(7.4)
Легко побачити, що не всі системи можуть бути описані за
допомогою скінченновимірних рівнянь стану.
Приклад 7.3: Розглянемо одиничну лінію затримки, що
описується співвідношенням
y t ut 1
Для знаходження вихідної функції при t t0 необхідно знати u(t) і
не тільки для, але і для t 1 t t 0 , тобто не можна вказати
ніякого скінченновимірного стану, який задовольняє наше
визначення. Тут вже потрібний функціональний простір.
Системи, які допускають опис за допомогою скінченновимірного
простору станів, відомі як скінченновимірні системи або системи
із зосередженими параметрами. Іншим прикладом системи, яка
не має скінченновимірного простору станів, є диференціююча
ланка, що описується співвідношенням
d
y t u t .
dt
Цю залежність можна представити в вигляді
99
y t lim
h 0
(u(t ) u(t h ))
.
h
Як і у разі одиничної лінії затримки, вихідна функція в
момент t залежить від значень вхідної функції на інтервалі.
Отже, нічого не можна сказати про те, скільки змінних станів
потрібно для опису даної системи; ймовірно, набір їх може
виявитися «перенасиченим» за рахунок деякої кількості
фіктивних станів. Тому необхідно розглядати можливість
наявності двох або більше еквівалентних станів.
Розглянемо способи запису рівняння стану. Тут не можна
запропонувати який-небудь універсальний метод, однак аналіз
прикладів дозволяє скласти рівняння стану для великої
кількості фізичних систем, які зазвичай зустрічаються на
практиці.
Приклад 7.4: Проста механічна система - тіло з точковою
масою m, яке рухається з одним просторовим ступенем свободи.
Рух цього тіла можна описати системою двох диференціальних
рівнянь першого порядку:
- рівняння яке визначає імпульс тіла р,
1
p(t ) mx (t ) , або x (t ) p(t )
m
- рівняння для сили, що діє на тіло
p (t ) f (t ) .
Останнє рівняння являє собою другий закон Ньютона. У
загальному випадку сила f може залежати від координати х
(наприклад, сила, визначувана дією пружини), імпульсу р
(наприклад, сила в умовах тертя), зовнішньої дії і часу t. Отже,
диференціальні рівняння стану, що описують одновимірний рух
тіла з точковою масою, мають вигляд
1
x (t ) p(t )
m
i
p t f x t , pt , ut , t .
де х і р – змінні стани. Рух тіла з точковою масою в тривимірному
просторі може бути описаний трьома парами диференціальних
рівнянь першого порядку аналогічно розглянутому прикладу,
причому зв'язок змінних стaнy закладений в другому рівнянні
100
кожної пари.
Приклад 7.5: Визначимо рівняння стани, що визначають рух
тіла з точковою масою в механічній системі (рис.7.5): тіло ковзає
без тертя по дроту, закріпленому у вертикальній площині і
описуваною однозначною функцією, що диференціюється, (x) .
На тіло у вертикальному напрямку діє зовнішня сила
u( x, t ) g , де G – прискорення вільного падіння стала. Рівняння
руху тіла має вигляд
1
x t
p(t )
2
m 1 x
де p(t) – імпульс тіла, направлений вздовж дроту, і
d
x x .
dx
Рисунок 7.5 - Тіло з точковою масою ковзає (без тертя) по
дроту під дією вертикальної сили
Крім того, похідна імпульсу за часом, направлена вздовж
дроту, є компонентою вертикальної сили, яка направлена у
вздовж дроту, тобто
( x )
p (t )
[u ( x , t ) g ] .
1 [( x )]2
Якщо розглядати випадок нульової вхідної дії, то через закон
збереження енергії маємо
1
2
m1 ( x ) [ x (t )] 2 mg( x ) E ,
2
де постійна E (повна енергія системи) визначається початковими
умовами (вертикальною координатою тіла і його швидкістю
уподовж дроту). Звідси слідує інше співвідношення
( 2 /(mE ) 2 g( x )
x (t )
.
1 [( x )]2
Отже, система може бути описана за допомогою другої пари
101
змінних стану: горизонтальною складовою х і повною енергією
E (постійною). Ця пара змінних стану зручніша, ніж координата
х і імпульс р, оскільки тепер система зводиться до системи
першого порядку. Для вивчення багатьох фізичних систем
енергія є більш зручною змінною стану, ніж координата або
імпульс, оскільки багато систем є консервативними (тобто з
сталою енергією).
Приклад 7.6: Система являє собою рух тіла з точковою
масою в центральному силовому полі u(r) (рис.7.6). Спочатку в
якості змінних стану виберемо кут θ, кутовий імпульс p , радіус r
і лінійний імпульс pr .
Рисунку 7.6 - Тіло з точковою масою в центральному
силовому полі.
Ці змінні задовольняють чотирьом диференціальним
рівнянням першого порядку:
1
p
mr 2
(збереження об’єкту в центральному силовому полі)
p 0,
r
1
pr
m
i
1 2
p u r .
mr
Видно, що момент постійний:
p l .
Повна енергія системи дорівнює
p r
102
1 2 1 l2
E mr
V r ,
2
2
2 mr
де V (r ) потенціальна енергія, яка описує центральне силове поле
V r u d,
r
або
d
V r .
dr
Отримаємо інший опис системи, якщо у якості змінних станів
вибрати θ, r, p0 , E .
1
p
mr 2 ,
u r
p
2
E V (r)
,
m
2mr 2
і E 0 - закон збереження енергії.
Ці приклади показують, що змінні стани можуть бути
вибрані не єдиним способом.
r
Приклад 7.11: Розглянемо коло на рис.7.11. Напруга джерела
u1 (t ) і u2 (t ) є вхідними функціями, а напруга на резисторах R1 і
R2 вихідними функціями – y1 uR і y 2 uR . В якості змінних
стану виберемо струми через котушки індуктивності і напругу на
конденсаторі.
1
2
Рисунок 7.11 - Електричний ланцюг з трьома змінними стану.
або
Згідно із першим законом Кірхгофа
dx
C1 2 x1 x3 0,
dt
103
x2
1
1
x1 x3
C1
C1
або після підстановки C1 1
x 2 x1 x3
Розглядаючи контури 1 і 2 і застосовуючи другий закон
Кірхгофа для напруги, отримуємо:
Для першого кола
dx
L1 1 R1 x1 u1 x2 0 ,
dt
або
R
1
1
x1 1 x1 x2 u1 ,
L1
L1
L1
або, після підстановки
x1 2 x1 x2 u1 .
Для другого кола
dx
L2 3 R2 x3 u2 x2 0
dt
або
1
R
1
x3 x2 2 x3 u2
L2
L2
L2
або після підстановки
x3 4 x2 2 x3 4u2 .
Вихідні функції мають вигляд
y1 R1 x1 2x1 ,
y2 R2 x3 0,5 x3 .
x1
u
Позначивши через : x x 2 - вектор стану, u 1 , - вектор
u2
x
3
y
вхідного впливу, y 1 - вектор виходу, можна записати
y2
диференціальне рівняння стану у матричній формі:
x Ax Bu ,
де
104
R1 1
0
1
L L
1
L
1
2 1 0
1
1
1
A
0
1 0 1 , B 0
C1
C1
0
R2 0 4 2
1
0
L
L
2
2
Рівняння вхід – стан – вихід має вигляд
y Cx
0 1 0
0 0 0 .
1
0 4
L2
де
R
C 1
0
0 2 0 0
.
0 R2 0 0 0,5
0
4.2 Лінеаризація систем високого порядку
За допомогою розкладу в ряд Тейлора знаходиться рівняння
стану, яке описує поведінку системи при «малих відхиленнях».
Доцільно узагальнити процедуру на випадок системи n -го
порядку з використанням матричної символіки.
Розглянемо нелінійну систему, для якої рівняння стану в
стандартній формі має вигляд
x t f xt , ut , t ,
y t gxt , ut , t .
(7.5)
Припустимо, що знайдений розв’язок рівняння (7.5) для
заданого початкового стану x 0 (t 0 ) і вхідного впливу u 0 (t ) у
вигляді вектор функцій x 0 (t ) і y 0 (t ) при t t 0 . Очевидно
справедливі рівності
x 0 t f x 0 t , u 0 t , t ,
y 0 t g x 0 t , u 0 t , t .
В результаті малого відхилення по входу стану і виходу
отримуються нові вектор функції u1 (t ), x1 (t ), y 1 (t ) при t t 0 , де
відхилення мають вигляд
η(t ) u1 (t ) u 0 (t ),
ξ (t ) x 1 (t ) x 0 (t ),
ν(t ) y 1 (t ) y 0 (t ).
105
В подальшому, для скорочення запису опустимо показ
аргументу. Отримаємо
x 0 ζ f x 0 ζ, u 0 η, t ,
y 0 ν g x 0 ζ, u 0 η, t .
Припустимо, що функції f і g двічі диференційовані по всіх
аргументах за винятком може t. Розкладемо в ряд Тейлора (в
кожен момент часу) в околі вихідного розв’язку
df
f
2
2
x 0 ζ f x 0 , u 0 , t
ξ
ηO ξ , η
dx x0 ,u0
u x0 ,u0
і
dg
g
2
2
y 0 ν gx 0 , u 0 , t
ξ
ηO ξ , η
dx x0 ,u0
u x0 ,u0
Де відповідні якобіани мають вигляд
df1
dx
df 1
df 2
dx1
dx
...
df n
dx
1
df1
dx2
df 2
dx2
...
df n
dx2
dg1
dx
dg1
dg 2
dx
dx 1
...
dg m
dx
1
dg1
dx2
dg 2
dx2
...
dg m
dx2
Нехтуючи ζ
рівняння:
2
df1
dxn
df 2
dxn ,
...
df n
dxn
...
...
...
...
...
...
...
...
і η
2
df1
du
df 1
df 2
du1
du
...
df n
du
1
dg1
dxn
dg 2
dxn ,
...
dg m
dxn
dg1
du
dg1
dg 1
du
du 1
...
dg m
du
1
df1
du2
df 2
du2
...
df n
du2
dg1
du2
dg 2
du2
...
dg m
du2
...
...
...
...
...
...
...
...
df1
dur
df 2
dur ,
...
df n
dur
dg1
dur
dg 2
dur .
...
dg m
dur
можна отримати апроксимуючі лінійні
df
df
ζ
ζ
η,
dx x0 ,uo
du x0 ,u0
ν
dg
dg
ζ
η
dx x0 ,u0
du x0 ,u0 ,
106
або
ζ t A t ζ t Bt ηt ,
νt Ct ζ t Dt ηt ,
де
At
df
df
dg
dg
, Bt
, Ct
, Dt
.
dx x0 ,u0
du x0 ,u0
dx x0 ,u0
du x0 ,u0
Можна вважати, що величина η мала, так як вона
визначається вхідною (керуючою) дією. З іншого боку,
2
твердження про малість величини ζ не завжди можлива, і
залежить від стійкості системи.
2
Приклад 7.12: Нехай рівняння стану нелінійної системи 3-го
порядку записується в вигляді
x1 x2 ,
2
x2 2 x1 3x3 u1 ,
x 4 x x x 2u .
1 2
3
2
3
Тоді для сталого вхідного впливу u1 3 і u2 1 / 2 єдиною
точкою рівноваги є
0
x 0 0 .
1
Очевидно, що точка рівноваги є розв’язком системи
диференціальних рівнянь. Лінеаризована відносно цієї точки
рівноваги система рівнянь має вигляд
ζ t Aζt Bηt ,
де
0 1 0
A 2 0 6
0 0 1
0
і B 1 .
2
4.3 Розв’язок рівняння стану високого порядку.
Широкий
клас
систем
описуються
нестаціонарними рівняннями стану (7.3)
107
лінійними
x (t ) A(t )x(t ) B(t )u(t ),
y (t ) C(t )x(t ) D(t )u(t ).
(7.6)
Крім цього, для розв’язку багатьох задач є можливість
апроксимувати такими рівняннями і інші типи систем. Тому є
необхідність розв’язку лінійних нестаціонарних рівнянь стану.
Як і у випадку систем першого порядку, доцільно спочатку
дослідити однорідне рівняння, яке відповідає випадку u(t ) 0 ,
тобто реакції системи на нульовий вхідний вплив.
x (t ) A(t )x(t ).
(7.7)
Тривіальним розв’язком цього рівняння є нульовий вектор
тобто x 0 .
Очевидно, що для ненульового початку стану тут має бути
нетривіальний розв’язок.
В загальному випадку надзвичайно важко, а іноді і
неможливо, отримати в дійсному вигляді розв’язок лінійного
нестаціонарного рівняння стану (7.6).
По аналогії з системами першого порядку, де введено
поняття перехідної функції стану, для систем високого порядку
введено матрицю Φt , t0 , яка називається перехідною матрицею
стану і якій притаманні наступні властивості:
d
Φt, t0 A(t )Φ(t, t0 ) ;
dt
2) Φt0 , t0 E.
1)
Спочатку нічого не відомо відносно форми матриці Φt , t0 ,
однак треба постаратися з її допомогою знайти загальний
розв’язок лінійних рівнянь стану. Крім того, для даної лінійної
системи диференціальних рівнянь:
x t A(t )x(t )
з
x ( t0 ) x 0
єдиний розв’язок для x виражається через матрицю Φt , t0
x(t ) Φ(t , t0 )x 0
при всіх t , оскільки
x(t0 ) Φ(t0 , T0 ) Ex 0 x 0
і
108
d
d
d
[x(t )] [Φ(t0 , t0 )x 0 ] [Φ(t , t0 )]x 0
dt
dt
dt
A(t )Φ(t , t0 )x 0 A(t )x(t ).
Назва перехідна матриця стану є цілком відповідним для
матриці Φ(t , t0 ) , так як вона відображає стан в момент t0 з
допомогою лінійного перетворювання:
x(t ) Φ(t , t0 )x(t0 ).
Початковий момент є довільним і може розглядуватися як
деяка змінна, тому перехідну матрицю стану можна записати у
вигляді матриці Φ(t, ) , яка характеризується наступними
властивостями:
д
1) [Φ(t , )] A(t )Φ(t , ) ;
дt
2) Φ(t, ) E при t ,
3) Φ(t1 , t2 )Φ(t2 , t3 ) Φ(t1 , t3 )
4) Φ(t1 , t2 )Φ(t2 , t1 ) Φ(t1 , t1 ) E,
1
5) Φ(t1 , t2 ) Φ(t2 , t1 ).
По аналогії з системами першого порядку перехідна матриця
стану має вигляд
t
Φ(t , t0 ) exp A ( )d ,
t0
а для стаціонарних систем
Φ(t , t0 ) exp A(t t0 ) .
Реакція стану системи на нульовий початковий стан
визначається залежністю
t
x u (t ) Φ(t , )B( )u( )d
t0
Загальна реакція стану системи визначається як:
x (t ) x 0 (t ) x u (t ) ,
або
t
x(t ) Φ(t , t0 )x t0 Φ(t , )B( )u( )d .
t0
Для стаціонарних систем
x(t ) e
A ( t t0 )
t
xt0 e A ( t ) Bu( )d .
t0
109
Приклад 7.13. В прикладі 7.11 для ланки на рис.7.11 рівняння
стану у стандартній формі ає вигляд:
2 1 0 1 0
x 1 0 1x 0 0 u ,
0
4
2
0
4
2 0 0
y
x .
0
0
0
,
5
Розв’язок цих рівнянь легко можна знайти після
обчислювання e At . Характеристичними числами матриці A
знаходяться з рівняння
2 1
0
det( A E) 1
1 (2 ) 2 5(2 ) 0 ,
0
4 2
Звідки 1 2 , 2 1 2i , 3 1 2i . Відповідна сукупність
власних векторів має вигляд:
1
1
1
ξ1 0 , ξ 2 1 2i , ξ 3 1 2i .
1
4
4
Функцію від матриці можна знайти з співвідношення
e At Se Λt S1 ,
де Λ diag(e1t , e2t , e3t ) і S – матриця власних векторів. Звідки:
e
At
1
1 e 1t
1
1
0 1 2i 1 2i 0
20
4
4 0
1
1t
1t
0
e
2t
0
1t
16e ( 2 i )e ( 2 i )e
1
5i ( e 1t e 1t )
20
16e 1t (8 4i )e 1t (8 4i )e 1t
0 16
0
4
0 2 i 5i 2 i
e 3t 2 i 5i 2 i
5i ( e 1t e 1t )
4e 1t ( 2 i )e 1t ( 2 i )e 1t
(10 5i )e 1t (10 5i )e 1t 5i ( e 1t e 1t )
1t
1t
1t
1t
1t
20i ( e e )
4e (8 4i )e (8 4i )e
16e 2 t 2e t ( 2 cos 2t sin 2t )
10e t sin 2t
4e 2 t 2e t ( 2 cos 2t sin 2t )
1
.
10e t sin 2t
e t ( 2 cos 2t sin 2t ) 10e t sin 2t
20
16e 2 t 8e t ( 2 cos 2t sin 2t ) 40e t sin 2t
4e 2 t 8e t ( 2 cos 2t sin 2t )
Перехідна
матриця
стану
Φ(t , t0 )
перетворень Ейлера має вигляд:
110
після
використання
16e 2 ( t t0 ) 2e ( t t0 ) ( 2 cos 2(t t0 ) sin 2(t t0 ))
1
Φ(t , t0 ) 10e ( t t0 ) sin 2(t t0 )
20
2 ( t t0 )
( t t0 )
16e
8e
( 2 cos 2(t t0 ) sin 2(t t0 ))
10e ( t t0 ) sin 2(t t0 )
( t t )
0
( 2 cos 2(t t0 ) sin 2(t t0 ))
e
40e ( t t0 ) sin 2(t t )
0
4e 2 ( t t0 ) 2e ( t t0 ) ( 2 cos 2(t t0 ) sin 2(t t0 ))
( t t )
10e 0 sin 2(t t0 )
4e 2 ( t t0 ) 8e ( t t0 ) ( 2 cos 2(t t ) sin 2(t t ))
0
0
Відзначимо, що реакція є дійсною функцією, не дивлячись на
те, що в результаті перетворень, можуть з’являтися комплексні
власні вектори.
4.4 Перетворення змінних стану
Припустимо, що x t – вектор стану в n -мірному лінійному
векторному просторі станів X . Нехай W - невироджена
квадратна матриця порядку n з постійними коефіцієнтами. Тоді
вектору x t можна поставити у відповідність вектор ξ(t ) за
співвідношенням:
ξt W 1xt , (тобто xt Wξt )
який також можна розглядати як вектор стану.
Отже, якщо задане лінійні стаціонарне рівняння стану у
стандартній формі
x (t ) Ax(t ) Bu(t ),
y(t ) Cx(t ) Du(t ) ,
то, оскільки x (t ) Wξ (t ) , то
ξ (t ) W1 AWξ(t ) W1Bu(t ) ,
y(t ) CWξ(t ) Du(t ) .
При
такому
перетворенні
розв’язок
може
бути простішим шляхом використання перетвореного рівняння
стану, яке описує систему, еквівалентну первинній. Іншими
словами, системи, описані первинним рівняннями стану у
стандартній формі і системи з перетвореними змінними стану,
будуть еквівалентні.
Очевидно, що у якості матриця перетворення W слід
вибрати матрицю, таку, що
S 1 AS J ,
де J – жорданова канонічна форма матриці A . Відповідні
рівняння стану у стандартній формі має вигляд
ξ t Jξt S 1But ,
111
y t CSξ t Dut ,
а перехідна матриця стану може бути записана у вигляді
Φt , t0 e J t t0 .
Для випадку різних власних значень Жарданова матриця
вироджується в діагональну матрицю:
ξ t Λξt S 1But ,
y t CSξ t Dut ,
а перехідна матриця стану
Φt , t0 e Λ t t0 diag(e 1 ( t t0 ) , e 2 ( t t0 ) ,, e n ( t t0 ) ) .
Приклад 7.14
рівняннями станів
Розгледимо
систему,
що
описується
x (t ) Ax(t ) Bu(t ),
y(t ) Cx(t ) ,
де
3
2 2
0
A 1
1
1 , B 2 і C 1 2 0 .
1
3
1
0
Характеристичні числа матриці A дорівнюють 1 1 ,
2 2 і 3 3 . Матриця власних векторів S має вигляд
11 1
1
S 1
1 1 .
1 14 1
Перетворене рівняння стану у стандартній формі має вигляд
1 (t ) 1
0 0 1
50
1 2 u (t ) ,
(
t
)
0
2
0
2
2 15
3 (t ) 0
0 3 3
22
1
y 2 13 3 2 .
3
Перехідна матриця станів для цієї системи має вигляд
e t t0
0
0
Φt , t0 0
e 2 t t0
0 .
0
0
e 3t t0
112
4.5 Системи з дискретним часом
У загальному випадку довільна лінійна дискретна система
порядку n описується рівнянням різниці порядку n :
an y ( n ) an1 y ( n 1) ... a1 y ( 1) a0 y ( )
bm u( m) bm1u( m 1) ... b1u( 1) b0 ,
або системою n рівнянь різниці стану першого порядку в
матричному вигляді:
x(k 1) A(k )x(k ) B(k )u(k )
і матричним рівнянням типу вхід-стан-вихід:
y(k ) C(k )x(k ) D(k )u(k ),
де u(k ) - вхідна послідовність r векторів, y (k ) - вихідна
послідовність m векторів і x(k ) - послідовність n векторів
станів.
Якщо n n - матриця A(k ) , n r - матриця B(k ) , m n матриця C(k ) і m r - матриця D(k ) залежать від k , то система
нестаціонарна, якщо ж всі вони постійні, то система стаціонарна і
рівняння стану мають вигляд:
x(k 1) Ax(k ) Bu(k )
і
y(k ) Cx(t ) Du(t ) .
Розглянемо однорідне нестаціонарне дискретне рівняння
різниці:
x(k 1) A(k )x(k ).
Якщо заданий початковий стан x 0 то можна сказати, що
x(1) A (0)x 0 ,
x(2) A(1)A(0)x 0 ,
або в загальному випадку:
k 1
x(k ) A(i )x 0 ,
k 0.
i C
Дискретна перехідна матриця стану визначається за
допомогою співвідношень:
1) x(k ) Ф(k , m)x(m),
2) Φ(k , k ) E .
Іншими словами, дискретна перехідна матриця стану описує
рух станів системи і є аналогом перехідної матриці стану,
113
визначеної вище для системи з безперервним часом.
За визначенням перехідної матриці стану отримуємо:
x( k ) Ф( k ,0)x 0 .
Очевидно, що:
k 1
Ф(k ,0) A(i ),
k 0.
i 0
Якщо A(k ) - постійна матриця, тоді:
Ф( k ,0) Ф(k ) A k .
Неважко показати, що дискретна перехідна матриця стану
задовольняє наступним властивостям:
Ф(k1 , k2 ) Ф(k2 , k1 ) Ф(k3 , k1 ),
Ф(k1 , k2 ) Ф(k2 , k1 ) .
1
У стаціонарному випадку для обчислення перехідної матриці
стану можна використовувати теорему Келі - Гамільтона.
Приклад 7.15. Для системи з дискретним часом, описуваної
рівнянням –
1
0
x( k 1)
x k ,
4
5
отримуємо:
Ф(k ) Ak a0 1 a1A.
Власні значення матриці A дорівнюють 1 1, 2 4.
Відповідно, власні значення матриці A k дорівнюють:
(1 ) k ( 1) k
і
( 2 ) k ( 4) k .
тому
(1 )k (1)k a0 a11 a0 a1 ,
( 2 )k (4)k a0 a1 2 a0 4a1.
Вирішуючи ці рівняння, отримуємо:
4
1
a0 ( 1) k ( 4) k
3
3
та
Відповідно:
1
1
a0 ( 1) k ( 4) k .
3
3
114
1
4
k
k
(
1
)
(
4
)
3
Ф(k ) 3
4
4
k
k
( 1) ( 4)
3
3
1
1
( 1) k ( 4) k
3
3
.
1
4
k
k
( 1) ( 4)
3
3
Тепер можна знайти повний розв’язок дискретного рівняння
стану. Для заданого початкового стану отримуємо:
x(1) A(0)x 0 B(0)u(0),
x(2) A(1)x(1) B(1)u(1)
A(1)A(0)x 0 A(1)B(0)u(0) B(1)u(1),
в загальному
k 1
x(k ) A(i )x 0 A( j )B(i )u(i ),
k 1,2... .
i 0
i 0
j i 1
Припустимо, що стаціонарна система з неперервним часом
(рис 7.14,а) яка задана рівняннями стану наступного виду
x (t ) Ax(t ) Bu(t )
та
k 1
k 1
y (t ) Cx (t ) Du(t ).
Як видно, розвязок диференційного рівняння стану має
вигляд:
x(t ) e
A ( t t0 )
t
x(t0 ) e A ( t ) Bu( )d,
t0
де x (t0 ) - заданий початковий стан. Нехай для спрощення t 0 0 .
Припустимо, що шукається тільки значення y (t ) в фіксовані
моменти часу O, T ,2T ,..., тобто здійснюється вибірка вихідний
функції в момент t 0, T ,2T ,... (рис. 7.14,б). З рівняння вхід - стан
- вихід видно:
(7.39)
y(kT ) Cx(kT ) Du(kT )
(k 0, 1, 2, . . .).
Тому необхідно визначити стан x(t ) в моменти 0, T ,2T ,... .
Розглянувши розв’язок диференційного рівняння стану,
отримуємо:
kT
A ( k 1) T
x( kT ) e x(( k 1)T ) e
e A Bu( )d.
( k 1) T
AT
Припустимо далі, що перед поступленням в систему вхідна
дія u(t ) піддається операціям вибірки і затримки (рис. 7.14, в),
тобто проходить через деякий прилад, на виході якого з функції
115
отримують кусково-постійну функцію u(t ) (рис. 7.14, г):
~(t ) u(kT )
u
(kT T (k 1)T ),
де k - будь-яке ціле число k (..., 2 1,0,1,2,...) . Зауважимо, що
~(t ) і краще апроксимуються функцію
при зменшенні T функція u
u(t ) .
Слід вести наступні позначення. Так як функції y (t ) , u(t ) і
x(t ) розглядаються тільки в певні фіксовані моменти часу,
наприклад y(kT ) , u(kT ) і x(kT ) , де k - ціле число, тоді можна
підкласти:
і
y(k ) y(kT ),
x(k ) x(kT )
u(k ) u(kT ).
У цих рівняннях вихідний сигнал системи (рис. 7.14, в) має
вигляд:
y(k ) Cx(k ) Du(k ),
де в силу співвідношення (7.40):
AkT kT A
AT
x(k ) e x(k 1) e
e Bdu(k 1), k 1,2,...
( k 1) T
Розглянемо доданок:
kT
e
AkT
e A Bd
( k 1) T
який можна переписати у вигляді:
kT
e A ( kT ) Bd .
( k 1) T
Після заміни змінних
kT співвідношення (7.41)
T
A
набуває вигляду e Bd. Цей вираз є постійною матрицею. Тому
0
вираз (7.40) приводиться до виду:
T
x(k ) e x(k 1) u(k 1) e A Bd.
AT
0
Визначимо фундаментальну матрицю F , підставивши:
F e AT
Нехай, крім того,
T
G e A Bd.
0
116
Рисунок. 7.14. Лінійна стаціонарна система (а), лінійна
стаціонарна система з вибіркою на виході (б), дискретний
аналог системи (в), операція вибірки і затримки вхідної
функції (г)
У цьому випадку рівняння, що описують систему на рис.
7.14, в, мають вигляд:
x(k 1) Fx(k ) Gu(k )
і
y(k ) Cx(k ) Du(k ).
Таким чином, показано, що за допомогою відповідної
вибірки безперервна лінійна стаціонарна система, що описується
рівняннями стану виду:
x(t ) Ax(t ) Bu(t )
і
y(t ) Cx(t ) Du(t ),
може бути перетворена в дискретну систему, описувану
«дискретними рівняннями стану»:
x(k 1) Fx(k ) Gu(k )
і
y(k ) Cx(k ) Du(k ).
де F e
T
AT
A
і G e Bd, а T - інтервал вибірки.
0
117
Приклад 7.15 Розглянемо
описується рівняннями:
неперервну
систему,
що
x1 1 0 x1 0
x 0 2 x 1u
2
2
і
x1
y 1 1 .
x 2
Легко показати, що
e t e t e 2 t
e
e 2 t
0
Найдемо відповідну дискретну систему:
e t e 2 t
At
Fe
,
2 t
e
0
1 T 1 2T
T
2 e 2 e
A
G e Bd
,
1
2
T
0
(1 e )
2
так, що дискретні рівняння стану мають вигляд:
e T e T e 2T
eT 1
x(k 1)
x ( k ) 2 T u( k )
2 T
e
0
e 1
і
y(k ) 1 1x(k ).
At
4.6 Контрольны питання
Що таке:
1. Еквівалентність станів і еквівалентність систем.
2. Системи
високого
порядку
їх
математичне
представлення..
3. Основні теореми для однорідних систем високого
порядку.
4. Поняття фундаментальної матриці.
5. Теорема Ліувілля.
6. Перехідна матриця стану.
7. Взаємозв’язок між фундаментальною матрицею і
118
перехідною матрицею стану.
8. Загальний розв’язок рівняння стану систем високого
порядку.
9. Модифікація при переході до іншого базису.
10. Лінеаризація систем високого порядку.
11. Рівняння стану у сукупній формі.
12. Системи з дискретним часом, їх опис за допомогою
різницевих рівнянь.
13. Дискретна перехідна матриця стану.
14. Дискретні рівняння стану при виборці і затримці на вході
й дискретизації на виході.
15. Періодичні системи їх характеристики і опис.
4.7 Варіанти завдань до практичних занять
№7.1 Знайти рівняння стану, що описують систему з двох
однакових маятників, з'єднаних пружиною (див. рис.). Довжина
пружини в стані спокою дорівнює x0 . У припущенні, що
mg
lk
1,
10
знайти власні коливання при малих відхиленнях від точки
рівноваги 1 2 0. Знайти власні вектори і п їх зміст.
№7.2 Написати рівняння стану для системи на рисунку.
Невагомий візок котиться без тертя по площині, до візка
прикріпленого за допомогою шарніра без тертя стрижень маси m
і довжиною l , який має рівномірну щільність. Розглянути два
випадки: 1) вхідна функція і є силою; 2) вхідна функція є
швидкістю. Показати, що точка 0 є становищем рівноваги.
Лініарізувати рівняння стану в точці 0 і розглянути вхідну
функцію виду:
u(t ) Asin t
(однакову для обох випадків). Чи можна знайти достатні умови
для A і , такі, щоб положення рівноваги 0 була стійким,
асимптотично стійкою? Зауважимо, що положення рівноваги
119
0 нестійке при A 0
№7.3 Написати рівняння стану і рівняння типу вхід - стан вихід для ланцюга на рисунку.
№7.4 Розглянемо диференційні рівняння стану для частинки
в центральному силовому полі:
1
k
1
p 0,
p ,
u( r ) 2 ,
r pr
2
m
mr
r
і
1 2 k
p
p 2 .
mr
r
Припустимо, що рішення нульового порядку є круговою орбітою:
l3
mk
p l ,
(t0 ) 3 (t t0 ).
r 2 const ,
l
m
Знайти лініаризоване рівняння, що описують збурення біля
цієї орбіти.
№7.5 Задана система лінійних однорідних диференціальних
рівнянь:
x1 (t ) x2 (t ) ,
x2 (t ) x1 (t ) .
№7.6 Дійсна лінійна однорідна система, що описується
рівнянням:
x (t ) A(t ) x(t ),
називається самоспряженою, якщо перехідна матриця стану має
120
наступну властивість:
Ф(t, ) Ф(, t ) .
Сформувати властивість самоспряженості через властивості
матриці A(t ).
№7.7 Розглянути коло наведене на рисунку.
1) Написати рівняння стану у стандартній формі для цього
кола, якщо вихідними функціями є y1 (t ) U R1 (t ) і y2 (t ) U R2 (t ) ,
y3 (t ) U R3 (t ) .
2) Розв’язати ці рівняння щодо вихідних функцій y1 (t ) , y2 (t )
і y3 (t ) при заданому початковому стані.
3) Чи можна підібрати такий початковий стан, щоб збурити
кожне коливання незалежно від інших.
4) Які висновки можна зробити з відповіді на запитання 3 у
зв'язку з відомими властивостями матриці А (тобто дати фізичну
інтерпретацію відповіді на запитання 3).
№7.8 Показати, що якщо система адитивна щодо нульового
стану, тоді, якщо y1 - реакція на вхідний сигнал u1 при
нульовому початковому стані, реакція на вхідний сигнал cu1 при
нульовому початковому стані буде дорівнює cy1 , де c - будь-яке
ціле число (в тому числі від’ємне).
№7.9 Розв'язати задачу (7.8) для будь-якого раціонального
числа (Зауваження. Так як будь-яке ірраціональне число можна з
будь-якою точністю апроксимувати раціональним, з властивості
адитивності при нульовому стані майже випливає лінійність при
нульовому стані).
№7.10 Який найбільш загальний вигляд
стандартна форма рівняння стану:
x (t ) f (x(t ), u(t ), t ),
при умові, що рівняння залишається лінійним.
121
може
мати
№7.12 Знайти значення u(0) і u(1) , такі щоб система була
визначена у початку координат при k 2 :
1 x1 (k ) 0
x1 (k 1) 0
uk .
x2 (k 1) 2 3 x2 (k ) 1
№7.13 Для лінійної системи заданою рівнянням стану у
стандартній формі:
x(t ) Ax(t ) Bu(t ) ,
y (t ) x(t ) ;
для випадку різних власних значень, знайти реакцію на нульовий
вхідний вплив:
1)
5
3 0
5 4 0
A 3 2 5 , B 3 1 0 ,
0 1
0
2 3 4
1
x(0) 2 ;
1
2)
0
2 0
4 2 1
A 6 3 4 , B 1 3 1 ,
0 5
7
1 2 2
2
x(0) 2 ;
1
3)
1
3 0
3 1 1
A 3 4 4 , B 0 2 1 ,
0 1
0
0 1 2
1
x(0) 1 ;
1
4)
0
2 0
5 1 1
A 6 3 4 , B 0 4 1 ,
0 5
7
0 1 4
1
x(0) 2 ;
1
5)
1
3 0
6 2 1
1
A 3 4 4 , B 1 5 1 , x(0) 0 ;
1
0 1
0
1 2 4
6)
1 0 4
3 1 1
A 5 2 6 , B 2 2 1 ,
0 3
0
2 1 4
122
2
x(0) 0 ;
2
7)
0
2 0
2 0 1
A 6 5 2 , B 1 1 1 ,
0 3
4
1 0 2
0
x(0) 3 ;
1
8)
1 0 5
2 1 0
A 6 2 4 , B 1 2 0 ,
0 3
0
1 1 3
1
x(0) 1 ;
1
9)
2 0 4
3 11 7
2
A 6 3 5 , B 0 5 4 , x(0) 2 ;
2
0 6
0
0 1 1
4
4 0
5 1 1
10) A 5 2 6 , B 2 4 1 ,
0
0
3
2
1
6
2
x(0) 2 ;
2
4 0 4
5 1 1
11) A 3 3 5 , B 2 4 1 ,
0 6
0
2 1 6
3
x(0) 2 ;
1
1
3 0
3 2 2
12) A 1 5 6 , B 2 1 2 ,
0 6
0
2 2 3
1
x(0) 2 ;
3
1 0 5
5 2 2
13) A 2 5 6 ; B 0 5 0 ,
0
0
6
0
2
3
1
x(0) 2 ;
1
5
4 0
7 4 4
14) A 5 5 6 , B 2 3 2 ,
0 6
0
2 0 5
1
x(0) 2 ;
1
0
2 0
2 19 30
15) A 3 3 5 , B 0 5 12 ,
0 5
5
1
0 2
1
x(0) 2 ;
0
123
1
1 0
3 2 0
16) A 2 2 1 , B 2 1 0 ,
0 4
0
15 7 4
1
x(0) 2 ;
3
6
2 0
4 1 1
17) A 4 3 7 , B 2 4 1 ,
0 8
0
0 1 4
2
x(0) 2 ;
1
0
5 5
5 7 0
1
18) A 0 3 0 , B 3 1
0 , x(0) 2 ;
3
2 4
1
12 6 3
6 3 3
1 8 23
19) A 0 2 1 , B 0 5 7 ,
0
0
1
0
3
1
1
x(0) 4 ;
1
1 0 1
4 0 5
20) A 2 2 1 , B 7 2 9 ,
0 5
0
3 0 6
2
x(0) 1 .
3
6
2 0
4 1 1
21) A 4 3 7 , B 2 4 1 ,
0 1
0
0 1 4
2
x(0) 2 .
1
№7.14 Для лінійної системи заданою рівнянням стану у
стандартній формі:
x(t ) Ax(t ) Bu(t ) ,
y (t ) x(t ) ;
для випадку кратних власних значень, знайти реакцію на
нульовий вхідний вплив:
1)
0
2 0
4 2 1
A 6 3 4 , B 1 3 1 ,
0 2
7
1 2 2
124
2
x(0) 2 ;
1
2)
3)
4)
5)
6)
7)
8)
9)
5
3 0
5
A 3 2 5 , B 3
0 3
0
2
1
3 0
3
A 3 1 4 , B 0
0
0
1
0
4
1
3
1
2
1
0
0 ,
4
1
1 ,
2
1
x(0) 2 ;
1
1
x(0) 1 ;
1
2 0 4
5 1 1
1
A 5 2 6 , B 0 4 1 , x(0) 2 ;
1
0 2
0
0 1 4
0
2 0
6 2 1
1
A 6 3 2 , B 1 5 1 , x(0) 0 ;
1
0 3
4
1 2 4
1
A6
0
2
A 6
0
4
A 5
0
4
A 3
0
0
1
0
0
6
0
0
4
0
0
3
0
5
3
4 , B 2
1
2
4
2
5 , B 1
6
1
4
2
6 , B 1
3
1
4
3
5 , B 0
3
0
1 1
2 1 ,
1 4
0 1
1 1 ,
0 2
1 0
2 0 ,
1 3
11 7
5 4 ,
1 1
1
5 0
5 1 1
10) A 1 5 6 , B 2 4 1 ,
0 6
0
2 1 6
125
2
x(0) 0 ;
2
0
x(0) 3 ;
1
1
x(0) 1 ;
1
2
x(0) 2 ;
2
2
x(0) 2 ;
2
1 0 5
5 1 1
11) A 2 5 6 , B 2 4 1 ,
0 1
0
2 1 6
3
x(0) 2 ;
1
1
3 0
3 2 2
12) A 1 5 6 , B 2 1 2 ,
0 6
0
2 2 3
1
x(0) 2 ;
3
0
3 0
5 2 2
13) A 3 3 5 ; B 0 5 0 ,
0 5
1
0 2 3
1
x(0) 2 ;
1
1
1 0
7 4 4
14) A 2 4 1 , B 2 3 2 ,
0 4
0
2 0 5
1
x(0) 2 ;
1
6
2 0
2 19 30
15) A 4 3 7 , B 0 5 12 ,
0 2
5
0
0 2
1
x(0) 2 ;
0
0
5 5
3 2 0
16) A 0 4 0 , B 2 1 0 ,
2 4
1
15 7 4
1
x(0) 2 ;
3
6 3 3
4 1 1
17) A 0 2 1 , B 2 4 1 ,
0
0
6
0
1
4
2
x(0) 2 ;
1
5 0 1
5 7 0
1
18) A 2 2 1 , B 3 1
0 , x(0) 2 ;
3
0 5
0
12 6 3
2
3 0
19) A 4 2 1 ,
0 0 2
1 8 23
B 0 5 7 ,
0 3 1
126
1
x(0) 4 ;
1
4 3 3
4 0 5
20) A 0 4 1 , B 7 2 9 ,
0 4
0
3 0 6
2
x(0) 1 ;
3
2 3 2
0 1 1
21) A 0 2 2 , B 2 4 1 ,
0 2
0
0 1 4
2
x(0) 2 .
2
№7.15 Для лінійної системи заданою рівнянням стану у
стандартній формі:
x(t ) Ax(t ) Bu(t ) ,
y (t ) x(t ) ;
для випадку різних власних значень, знайти реакцію на нульовий
початковий стан:
1)
A
e t
1
4
3 4
0
, B
, u( t )
, x ( 0)
;
0 2
2 3
0
1(t )
2)
A
2 e t
1
2
1 4
0
, B
, u( t )
, x ( 0)
;
0 3
2 3
0
1(t )
3)
A
1 e t
1 0
1 2
0
, B
, u( t )
,
x
(
0
)
;
2 3
1 2
t
0
2e
4)
e 2t
1 0
1 2
0
A
, B
, u( t )
,
x
(
0
)
2 3
1 2
0 ;
t
2
e
5)
3 0
1 1
A
, B
3 4
0 1,
6)
A
3 e 2t
1 0
1 2
0
, B
, u( t )
,
x
(
0
)
;
3 2
2 1
0
1(t )
7)
A
e 2t
4 1
1 1
0
, B
, u( t )
, x ( 0)
;
0 1
2 1
3
t
0
e
1 e 2t
0
u( t )
,
x
(
0
)
0 ;
1
(
t
)
127
1(t )
1 2
1 0
0
, B
, u( t )
,
x
(
0
)
t
0 2
2 1
0 ;
2
e
8)
A
9)
1 e 2t
2 3
1 0
0
A
, B
, u( t )
,
x
(
0
)
0 3
0 1
0 ;
3t
1
e
1 e 2t
2 2
1 1
0
10) A
, B
, u( t )
,
x
(
0
)
0 1
0 ;
3t
1
e
0 4
3 e 5t
2 0
1 1
0
11) A
, B
, u( t )
, x ( 0)
;
1
4
1
1
0
1(t )
2 e t
0
3
1 1
0
12) A
, B
, u( t )
, x ( 0)
;
3
2
0
1
0
1(t )
0
1(t )
2
1 0
0
, B
, u ( t ) t , x ( 0)
;
13) A
2
3
0
1
0
e
1(t )
3 0
1 0
0
, B
, u( t )
,
x
(
0
)
;
14) A
t
0
1
1
1
0
1
e
1(t )
2 0
1 1
0
, B
, u( t ) 3t , x ( 0)
;
15) A
0
1
1
2
0
2
e
1(t )
3 0
1 1
0
, B
, u( t )
,
x
(
0
)
16) A
3t
2 2
0 ;
2
2
e
3 1
0
1(t )
3
2 2
0
, B
, u( t )
,
x
(
0
)
17) A
4t
2 2
0 ;
2
2
e
4 2
0
1(t )
4
3 2
0
, B
, u( t )
,
x
(
0
)
18) A
2t
2 4
0 ;
1 2
1 e
0
1(t )
4
3 2
0
, B
, u( t )
,
x
(
0
)
;
19) A
2t
1
2
2
4
0
1
e
3 e 5t
4 0
1 1
0
20) A
, B
, u( t )
;
x
(
0
)
1 1
0 ;
1
(
t
)
1 2
128
e 5t
0
1
0 1
0
21) A
, B
, u( t )
,
x
(
0
)
1 1
0 .
1
(
t
)
1 2
№7.16 Для лінійної системи заданою рівнянням стану у
стандартній формі:
x(t ) Ax(t ) Bu(t ) ,
y (t ) x(t ) ;
для випадку кратних власних значень, знайти реакцію на
нульовий початковий стан:
1)
A
2 e t
1
2
1 4
0
, B
, u( t )
, x ( 0)
;
0 2
2 3
0
1(t )
2)
A
1 e t
1 0
1 2
0
, B
, u( t )
, x ( 0)
;
2 1
1 2
t
0
2e
3)
A
e 2t
3 0
1 2
0
, B
, u( t )
,
x
(
0
)
2 3
1 2
0 ;
t
2
e
4)
4 0
1 1
A
, B
3 4
0 1,
5)
3 e 2t
2 0
1 2
0
A
, B
, u( t )
,
x
(
0
)
3 2
2 1
0;
1
(
t
)
6)
A
e 2t
1 1
1 1
0
, B
, u( t )
, x ( 0)
;
0 1
2 1
3
t
0
e
7)
A
1(t )
2 2
1 0
0
, B
, u( t )
,
x
(
0
)
t
0 2
2 1
0 ;
2
e
8)
A
1 e 2t
3 3
1 0
0
, B
, u( t )
,
x
(
0
)
;
0 3
0 1
3
t
0
1 e
9)
A
1 e 2t
4 2
1 1
0
, B
, u( t )
,
x
(
0
)
0 4
0 1
0 ;
3t
1
e
1 e 2t
0
u( t )
,
x
(
0
)
0 ;
1
(
t
)
129
3 e 5t
2 0
1 1
0
10) A
, B
, u( t )
,
x
(
0
)
1 1
0 ;
1
(
t
)
1 2
2 e t
3 0
1 1
0
11) A
, B
, u( t )
,
x
(
0
)
0 1
0 ;
1
(
t
)
3 3
0
1(t )
1
1 0
0
, B
, u ( t ) t , x ( 0)
12) A
0 1
0 ;
e
2 1
1(t )
3 0
1 0
0
, B
, u( t )
,
x
(
0
)
13) A
t
1 1
0 ;
1
e
0 3
0
1(t )
2
1 1
0
, B
, u( t ) 3t , x ( 0)
14) A
1 2
0 ;
0 2
2e
1(t )
3 0
1 1
0
, B
, u( t )
,
x
(
0
)
;
15) A
3t
3
3
2
2
0
2
2
e
0
1(t )
2
2 2
0
, B
, u( t )
,
x
(
0
)
;
16) A
4t
4
2
2
2
0
2
2
e
0
1(t )
4
3 2
0
, B
, u( t )
,
x
(
0
)
;
17) A
2t
1
4
2
4
0
1
e
0
1(t )
2
3 2
0
, B
, u( t )
,
x
(
0
)
18) A
2t
2 4
0 ;
1
e
1 2
3 e 5t
4 0
1 1
0
19) A
, B
, u( t )
; x ( 0)
;
1
4
1
1
0
1(t )
e 5t
1 0
0 1
0
20) A
, B
, u( t )
, x ( 0)
;
1
1
1
1
0
1(t )
e t
1
2
3 4
0
21) A
, B
, u( t )
,
x
(
0
)
2 3
0 .
1
(
t
)
0 2
130
№7.17 Записати рівняння стану:
x(t ) Ax(t ) Bu(t ) ,
y (t ) Cx(t ) ;
у канонічній формі.
1 0
1) A
,
1
2
1 1
B
,
1
2
C 1 2; .
1 0
2) A
,
1 2
1
B ,
2
2 3
C
;.
1 4
2 5
3) A
,
0
5
1 1
B
,
0
2
1 2
C
.
3
4
2 5
4) A
,
0
5
1 1
B
,
0
2
3 2
C
;
3
4
1 4
5) A
,
0 2
1 1 2
B
, C 2 4 ;
2 1 0
2 4
6) A
,
0
3
2
B ,
1
6 2
7) A
,
0
5
1 5 7
1 2
B
C
,
1 4 ;
2
0
1
4 5
8) A
,
1 2
1 2
B
,
1 1
C 0 2;
2 1
9) A
,
0
8
1 2
B
,
2
1
3 4
C
;
5
6
10)
2 0
1 2
A
B
,
3 4 ,
1
5
2 0
C
;
1
1
11)
1 2
1 2 1
1 2
A
B
C
,
,
0 1 2
0 1 ;
2
0
12)
1 2
A
,
0
4
0 2
C
;
3
0
1 2 2
0 1
B
C
,
1 0 ;
0
0
1
131
13)
2 3
A
,
0
5
1 2 1
B
, C 2 2;
1
1
2
14)
2 3
1 2 2
1 2
A
B
C
,
,
2 2 1
2 1 ;
0
4
15)
2 3
0 2 1
1 2
A
B
C
,
,
2 1 0
2 2 ;
0
6
16)
1 0
2 1
A
B
,
1 1 ,
1
2
2 1
C
;
1
0
17)
2 1
2 2
A
B
,
1 0 ,
0
3
2 2
C
;
2
2
18)
2 0
0 1
A
B
,
2 1 ,
2
4
2 0
C
;
1
2
19)
2 2
0 3
A
B
,
2 2 ,
1
5
2 2
C
;
1
2
20)
2 0
2 1
A
B
,
1 2 ,
1
6
2 2
C
;
1
2
21)
2 0
A
,
2
2
2 3 4
B
, C 1 1.
1
0
1
№7.18 Для заданої лінійної стаціонарної системи
неперервним часом
x(t ) Ax(t ) Bu(t ) ,
y (t ) Cx(t ) ;
знайти дискретне рівняння стану у стандартній формі.
1)
5
3 0
5 4 0
A 3 2 5 , B 3 1 0 ,
0 1
0
2 3 4
132
C 1 2 1;
з
2)
0
2 0
4 2 1
A 6 3 4 , B 1 3 1 ,
0 5
7
1 2 2
C 2 2 1;
3)
1
3 0
3 1 1
A 3 4 4 , B 0 2 1 ,
0 1
0
0 1 2
C 1 2 1;
4)
0
2 0
5 1 1
A 6 3 4 , B 0 4 1 ,
0 5
7
0 1 4
C 1 2 1;
5)
1
3 0
6 2 1
A 3 4 4 , B 1 5 1 , C 1 0 1;
0
0
1
1
2
4
6)
1 0 4
3 1 1
A 5 2 6 , B 2 2 1 ,
0 3
0
2 1 4
C 2 0 2;
7)
0
2 0
2 0 1
A 6 5 2 , B 1 1 1 ,
0 3
4
1 0 2
C 0 3 1;
8)
1 0 5
2 1 0
A 6 2 4 , B 1 2 0 ,
0
0
3
1
1
3
C 1 1 1 ;
9)
2 0 4
3 11 7
A 6 3 5 , B 0 5 4 , C 2 2 2;
0 6
0
0 1 1
4
4 0
5 1 1
10) A 5 2 6 , B 2 4 1 ,
0 3
0
2 1 6
133
C 2 2 1;
4 0 4
5 1 1
11) A 3 3 5 , B 2 4 1 ,
0 6
0
2 1 6
C 3 2 1;
1
3 0
3 2 2
12) A 1 5 6 , B 2 1 2 ,
0 6
0
2 2 3
C 1 2 3;
1 0 5
5 2 2
13) A 2 5 6 ; B 0 5 0 ,
0 6
0
0 2 3
C 1 2 1;
5
4 0
7 4 4
14) A 5 5 6 , B 2 3 2 ,
0 6
0
2 0 5
C 1 2 1;
0
2 0
2 19 30
15) A 3 3 5 , B 0 5 12 ,
0 5
5
1
0 2
C 1 2 0 ;
1
1 0
3 2 0
16) A 2 2 1 , B 2 1 0 ,
0 4
0
15 7 4
C 1 2 3;
6
2 0
4 1 1
17) A 4 3 7 , B 2 4 1 ,
0
0
8
0
1
4
C 2 2 1;
0
5 5
5 7 0
18) A 0 3 0 , B 3 1
0 , C 1 2 3;
2 4
1
12 6 3
6 3 3
1 8 23
19) A 0 2 1 , B 0 5 7 ,
0 1
0
0 3 1
134
C 1 4 1;
1 0 1
4 0 5
20) A 2 2 1 , B 7 2 9 ,
0 5
0
3 0 6
C 2 1 3;
6
2 0
4 1 1
21) A 4 3 7 , B 2 4 1 ,
0 1
0
0 1 4
C 4 2 1.
135
РЕКОМЕНДОВАНА ЛІТЕРАТУРА
1. Малько О.Г. Спеціальні розділи математики: Навчальний
посібник. Івано-Франківськ: ІФНТУНГ, 2010. – 322 с.
2. Дружинин В.В, Конторов Д.С.
Радио и связь. 1985.- 200с.
Системотехника. М.:
3. Коршунов Ю. М. Математические основы кибернетики.
М.: Энерго-атомиздат, 1987. - 424 с.
4. Капітонова Ю.В., Кривий С.Л., та. ін.. Основи дискретної
математики. К.: Наукова думка, 2002. – 579 с.
5. Бардачов Ю.М., Соколова Н.А., Ходаков В.Е. Дискретна
математика. К.: Вища шк., 2002. – 287 с.
6. Сигорский В. П. Математический аппарат инженера. –
К.: Техніка, 1977. – 768 с.
7. Директор С., Рорер Р. Введение в теорию систем. М.:
Мир, 1974.- 464 с.
8.
368с.
9.
Беллман Р. Введение втеорию матриц. М: Наука. 1969.–
Ланкастер П. Теория матриц. М: Наука. 1978.– 280с.
10. Гантмахер Ф.Р. Теория матриц.– 4 -е изд. – М. Наука.
1988.– 552с.
136