Экзамен
Оптимальные и адаптивные системы управления
Вариант 6
1. Применение метода гармонического баланса для определения
параметров автоколебательного режима экстремальных систем
автоматического управления
В установившемся режиме все сигналы замкнутой цепи ЭСАУ становятся
периодическими функциями. Предполагается, что сигнал x на входе объекта
равен
x=A0sinωt. (1)
Физическим обоснованием такого предположения являются фильтрующие
свойства системы. Требуется определить неизвестные: ω —частоту и A0—
амплитуду колебаний. Из выражения (1) находим
Y=Yср +Yпер (2)
где Yср—постоянная, Yпер—переменная с частотой 2ω составляющие на
выходе объекта
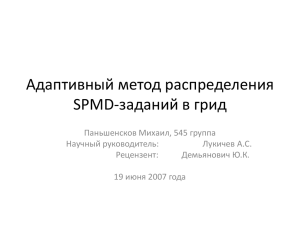
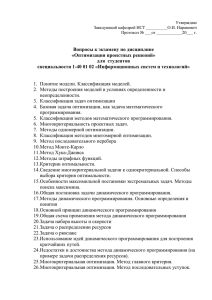
Рис. 1. Эпюры сигналов в ЭСАУ.
На рис. 1 показаны изменения сигналов на входе и выходе объекта и эпюра
сигнала на выходе нелинейного элемента НЭ (реверсирующего устройства).
Полагаем, что реверс величины и на выходе НЭ происходит тогда, когда у
после достижения минимума возрастает до величины порога ∆z. Это вызовет
запаздывание по фазе сигнала на выходе НЭ на величину ψНЭ по отношению
к сигналу х. Данное запаздывание может быть определено на основании рис.
1, согласно выражению
∆z=(KA)2/2)1-cos2нэ
(3)
Учитывая частотные свойства исполнительного устройства и запаздывание по
фазе, вносимое НЭ, для первой гармоники на выходе НЭ имеем
Х=4/*ВК()sin(t-нэ=()
(4)
где K(ω) и θ(ω) —значения амплитудно-частотной и фазо-частотной
характеристик исполнительной части ЭСАУ на частоте автоколебаний.
Условия баланса амплитуд и баланса фаз находятся из сопоставления
выражений (4) и (1):
A0=4/BK()
(5)
()=+нэ
(6)
Совместное решение уравнений (5) и (6) позволяет найти амплитуду и частоту
автоколебаний. Из уравнения (6) находим
𝟏
𝟐∆𝐳𝛑
𝟐
𝐤 𝟐 ∗𝟏𝟔𝐁 𝟐 𝐊 𝟐 (𝛚)
𝛗(𝛚) − 𝛑 = 𝐚𝐫𝐜𝐜𝐨𝐬 [𝟏 −
𝐜𝐨𝐬(𝟐𝝋(𝝎)) = 𝟏 −
𝟐∆𝐳𝛑
𝐤 𝟐 ∗𝟏𝟔𝐁 𝟐 𝐊 𝟐 (𝛚)
]
(7)
(8)
Уравнение (8) удобно решить графически, путем построения зависимостей
𝝋𝟏 = 𝒄𝒐𝒔𝟐𝝋(𝝎)
𝝋𝟐 = 𝟏 −
𝟐∆𝐳𝛑
𝐤 𝟐 ∗ 𝟏𝟔𝐁 𝟐 𝐊 𝟐 (𝛚)
В точке пересечения построенных зависимостей находится частота
автоколебаний ω. Амплитуду автоколебаний определяем подстановкой
найденного значения ω в выражение (5). Потери на поиск, согласно формуле
(2), составляют
(𝑲𝑨𝟎 )𝟐
𝜹=
𝟐
(𝟏𝟏)
Устойчивость найденного предельного цикла можно оценить приближенным
методом. Пусть коэффициент усиления разомкнутой системы по первой
гармонике равен
𝑲𝟏 (𝑨𝟎 , 𝝎) =
𝑩𝟏 𝑲(𝝎)
𝑨𝟎
(𝟏𝟐)
Задаваясь значениями А0, можно построить графические зависимости
фазового сдвига разомкнутой системы от частоты ω, Частота ω = ω0, при
которой θс(ω) = -2π, и будет частотой автоколебаний. При этом оказывается,
что ω0является функцией А0и K1(А0, ω) тоже является функцией А0.
Значение амплитуды предельного цикла A01может быть найдено из условия
𝑲𝟏 (𝑨𝟎 , 𝝎) = 𝟏
Варьируя A01на небольшую величину, δА0, можно оценить устойчивость
предельного цикла. При увеличении A01на величину δА0функция K1(А0,
ω(А0)) в системе, имеющей устойчивый предельный цикл, должна
уменьшаться. В противном случае система имеет неустойчивый предельный
цикл, так как общий коэффициент усиления не должен быть больше единицы.
Условия устойчивости предельного цикла
𝜷
𝒇[𝑨𝟎 , 𝝎(𝑨𝟎 )]}𝑨𝟎−𝑨𝟎𝟏 < 𝟎
{
𝜷𝑨𝟎
2.Характеристика метода динамического программирования
Динамическое программирование в теории управления и теории
вычислительных систем — способ решения сложных задач путём разбиения
их на более простые подзадачи. Он применим к задачам с оптимальной
подструктурой, выглядящим как набор перекрывающихся подзадач,
сложность которых чуть меньше исходной. В этом случае время вычислений,
по сравнению с «наивными» методами, можно значительно сократить.
Ключевая идея в динамическом программировании достаточно проста. Как
правило, чтобы решить поставленную задачу, требуется решить отдельные
части задачи (подзадачи), после чего объединить решения подзадач в одно
общее решение. Часто многие из этих подзадач одинаковы. Подход
динамического программирования состоит в том, чтобы решить каждую
подзадачу только один раз, сократив тем самым количество вычислений. Это
особенно полезно в случаях, когда число повторяющихся подзадач
экспоненциально велико.
Метод динамического программирования сверху — это простое запоминание
результатов решения тех подзадач, которые могут повторно встретиться в
дальнейшем. Динамическое программирование снизу включает в себя
переформулирование сложной задачи в виде рекурсивной последовательности
более простых подзадач.
Возникновение этого метода связывают с именем американского ученого Р.
Беллмана, который в начале 50-х годов ХХ века применил к ряду конкретных
задач прием, названный впоследствии принципом оптимальности. Основной
областью приложения последнего являются многошаговые процессы, т. е.
процессы, развивающиеся во времени, что дало основание назвать новый
метод оптимизации динамическим. Указанием на динамичность этот метод
отличался от линейного и математического программирования, исходная
постановка основных задач которых имела статический характер.
Трудно дать четкое определение динамическому программированию.
Укажем лишь на три характерные его особенности. Кроме принципа
оптимальности, основного приема исследования, большую роль в аппарате
динамического программирования играет идея погружения конкретной задачи
оптимизации в семейство аналогичных задач. Третьей его особенностью,
выделяющей его среди других методов оптимизации, является форма
конечного результата. Применение принципа оптимальности и принципа
погружения в многошаговых, дискретных процессах приводят к рекуррентнофункциональным уравнениям относительно оптимального значения критерия
качества. Полученные уравнения позволяют последовательно выписать
оптимальные управления для исходной задачи. Выигрыш здесь состоит в том,
что задача вычисления управления для всего процесса разбивается на ряд
более простых задач вычисления управления для отдельных этапов процесса.
Примеры, решаемых при помощи динамического
программирования задач
Сначала рассмотрим задачи оптимизации (задачи 1-5):
1. Маршрут оптимальной длины
Пример: Есть некоторая карта дорог, представленная в виде графа.
Наша цель: добраться из пункта А в пункт Б. Это сделать надо так, чтобы
минимизировать расстояние или потраченное топливо.
Целевой функцией здесь является расстояние от А до Б. Т.е. наша цель
— минимизировать расстояние.
А что является переменной выбора? Для того, чтобы найти кратчайший
путь, надо каждый раз принимать решения. Т.е. в каждой точке или на
каждом перекрестке необходимо принимать решения: куда повернуть
или ехать прямо.
Важно: Из этой задачи уже можно увидеть общую структуру задач,
решаемых при помощи динамического программирования: в каждой
задаче есть целевая функция и переменная выбора.
2. Замена машины (минимизация расходов)
Пример: Каждый год мы принимаем решение, ездить ли на старой
машине еще год и понести при этом издержки на поддержку и
обслуживание старой машины или же продать эту машину и купить
новую (и понести при этом издержки на покупку).
Целевая функция: минимизация расходов (либо на издержки на
поддержку старого автомобиля, либо на покупку нового).
Переменная выбора: каждый год принимать решение продать машину
или оставить.
3. Биржевой портфель
Пример: Игра на бирже, приобретение акций каких-либо компаний
Целевая функция: максимизация средних доходов, т.к. на бирже доход
получается вероятностным путем, т.е. это статистический процесс,
вероятностный.
Переменная выбора: то, какой портфель вложений будет: сколько
акций и какой фирмы нам необходимо купить.