Issledovanie_naprjazhenno-deformirovannogo_sostojanija_tela
реклама

МИНЕСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Российский Государственный Университет Нефти и Газа им. И.М. Губкина
Факультет геологии геофизики нефти и газа
Исследование напряжённо-деформированного
состояния тела
Курсовая работа
Выполнил: Плотников Б.С.
студент группы ГФ-09-03
Научный руководитель: доц. Беоусов А.В.
Москва
2012 год
ОГЛАВЛЕНИЕ
Введение ....................................................................................................................... 4
Цель работы ................................................................................................................. 5
Поставленные задачи .................................................................................................. 6
Исходные данные ........................................................................................................ 8
Методика решения задачи .......................................................................................... 9
Напряжения .............................................................................................................. 9
Деформации ........................................................................................................... 16
Связь между напряжением и деформацией ........................................................ 20
Упругие свойства среды ....................................................................................... 21
Решение поставленных задач ................................................................................... 23
Расчет напряженного состояния .......................................................................... 23
Расчет деформированного состояния .................................................................. 27
Расчет упругих параметров .................................................................................. 29
Заключение................................................................................................................. 30
Список литературы.................................................................................................... 31
2
Рисунок 1 Определение составляющих на произвольно ориентированной
наклонной площадке ................................................................................................... 9
Рисунок 2Составление уравнений моментов ......................................................... 12
Рисунок 3Удлинение и сдвиги ................................................................................. 17
Рисунок 4 компоненты напряжений на гранях кубического элемента ............... 23
Рисунок 5 Круговая диаграмма напряженного состояния .................................... 25
Рисунок 6 Сечение кубика, образованного главными площадками .................... 25
Рисунок 7 поверхность напряжений ....................................................................... 26
Рисунок 8 компоненты деформаций на гранях кубического элемента ............... 27
Рисунок 9 поверхность деформаций ....................................................................... 28
3
ВВЕДЕНИЕ
В настоящее время одним из основных методов разведочной геофизики
является
сейсмический
метод, основанный на
изучении
особенностей
распространения механических колебаний в горных породах. Эти колебания, в
большинстве, случаев вызываются внешними силами – ударным воздействием
взрыва или специальным устройством. Под действием приложенных сил в
горной породе происходит изменеие взаимного пложения частиц породы –
деформация среды.
Это приводит к возникновению внутренних сил –
напряжений, которыми уравновешивается действие внешних сил.
В горной породе под действием ударных нагрузок происходят как
упругие, так и неупругие деформации. Преобладание тех или иных
определяется рядом причин, из которых решающими являются величина
действующей силы и свойства самой породы. Если исключить из рассмотрения
некоторые образования, например сухой песок, и рассматривать область, где
силы, воздействующие на породы, малы по величине, то горные породы ведут
себя как упругое тело. Поэтому возникающие в породах колебания можно
рассматривать как колебания в упргой среде, в ходе которых возникают
упругие деформации. Связь таких деформаций с напряжением, а также с
упругими параметрами горной породы будет исследована в ходе данной
работы.
4
ЦЕЛЬ РАБОТЫ
Исследование напряжённо-деформированного состояния тела
5
ПОСТАВЛЕННЫЕ ЗАДАЧИ
1. Ввести систему координат и построить кубический элемент, образованный
координатными площадками.
2.
Показать компоненты напряжений на гранях этого элемента.
3.
Записать тензор напряжений.
4.
Построить полную круговую диаграмму для заданного напряжённого
состояния.
5.
Нанести на диаграмму напряжений три точки, координаты которых равны
напряжениям на координатных площадках.
6.
Построить на отдельном рисунке кубический элемент, образованный
главными
площадками,
показать
его
ориентацию
по
отношению
к
координатным осям.
7.
Нанести на диаграмму напряжений точку с координатами Pnn, Pnt,
указанными в варианте. Показать сечение кубика, образованного главными
площадками, напряжения в котором равны координатам этой точки.
8.
Построить поверхность напряжений.
9.
Определить
направления,
характеризующиеся
экстремальными
характеризующиеся
экстремальными
значениями нормального напряжения.
10.
Определить
направления,
значениями скалывающего напряжения.
11.
Записать тензор деформаций.
12.
Изобразить
компоненты
деформации
графически
на
кубическом
элементе, образованном координатными площадками.
13.
Определить деформации на площадке с заданной в условии нормалью n.
14.
Изобразить
деформации
графически
образованном координатными площадками.
15.
Построить поверхность деформаций.
6
на
кубическом
элементе,
16.
Определить упругие параметры горной породы во всех используемых
системах обозначений (коэфф. Ламэ, модуль Юнга и коэфф.Пуассона, модуль
всестороннего сжатия и модуль сдвига, скорости волн).
7
ИСХОДНЫЕ ДАННЫЕ
Для исследования напряженно-деформированного состояния тела была
выбрана осадочная горная порода известняк со следующими параметрами:
Скорость распространения продольных волн 4550 м/с
Скорость распространения поперечных волн 2300 м/с
Минеральная плотность 2680 кг/м3
Коэффициент Пуассона 0,33
Модуль Юнга 5,7∙1010 Па
Значения напряжений на площадке с заданной нормалью 𝑛 {
1
,
1
,
1
равны 𝑃1 = 500 кг⁄ 2 , 𝑃2 = −500 кг⁄ 2 , 𝑃3 = 1000 кг⁄ 2
м
м
м
Направляющие косинусы главных напряжений:
x
y
z
x`
0,2
0,2
0,959
y`
0,4
0,4
0,824
z`
0,6
0,6
0,529
8
}
√3 √3 √3
МЕТОДИКА РЕШЕНИЯ ЗАДАЧИ
НАПРЯЖЕНИЯ
Рассмотрим
тело,
подвергающееся
воздействию
внешних
сил
и
находящееся в равновесии. Внешние силы могут быть приложены к
поверхности тела – в этом случае говорят о поверхостных силах, или к каждому
элементу объема тела – объемные силы.
Вырежем из тела бесконечно малый четырехгранник с ребрами dx, dy и
dz, у которого грани dSyz ,dSxz и dSxy перпендикулярны к координатным осям x,
y и z, а четвертая грань dS – наклонная, с номалью n. (рис.1). Напрявляющие
ксинусы l, m, n определяют ориентировку нормали в пространстве.
РИСУНОК 1 ОПРЕДЕЛЕНИЕ СОСТАВЛЯЮЩИХ НА ПРОИЗВОЛЬНО ОРИЕНТИРОВАННОЙ НАКЛОННОЙ
ПЛОЩАДКЕ
9
Наша
задача
заключается
в
том,
чтобы
попытаться
выразить
составляющие напряжения Pn, действующего на произволно ориентированной
площадке dS, через напряжения на гранях dSyz ,dSxz и dSxy/
Составим уравнения равновесия четырехгранника. Очевидно, что если
четырехгранник не движется поступательно и не вращается, т.е. находится в
равновесии, то геометрическая сумма приложенных к нему сил должна
равнятсья нулю. В число этих сил входят поверхостные силы, действующие на
каждую грань, и объемная сила. Объемная сила, пропорциональна объему
1
четырехгранника ( 𝑉 = ∙ 𝑑𝑥 ∙ 𝑑𝑦 ∙ 𝑑𝑧 ),является величиной третьего порядка
6
малости относительно dx, dy, dz. Поверхостная сил, действующая на каждой
грани, равна произведению напряжения на площидь грани
1
и является
величиной второго порядка малости отнсительно dx, dy, dz. Например, ̅̅̅̅̅
𝑑𝑃𝑥 =
1
̅̅̅̅
𝑃𝑥 ∙ 𝑑𝑆𝑦 = ̅̅̅̅
𝑃𝑥 ∙ ∙ 𝑑𝑦 ∙ 𝑑𝑧. Ввиду этого при составлении уравнения равновесия
2
объемной силой можно пренебречь по сравнению с поверхостными силами. В
̅̅̅̅ = 𝑃𝑥
̅̅̅̅ ∙ 𝑑𝑆𝑦𝑧 + 𝑃𝑦
̅̅̅̅ ∙
результате уравнение равновесия запижется в виде 𝑃𝑛
̅̅̅̅ ∙ 𝑑𝑆𝑥𝑦.
𝑑𝑆𝑥𝑧 + 𝑃𝑧
Данное векторное уравнение можно заменить тремя скалярными для
проекций векторов на оси x,y,z. При запсис этих граней учтем, что площади
граней четырехуголника, перпендикулярных к параллельным осям, связаны с
площадью наклонной грани dS следующим образом: 𝑑𝑆𝑦𝑧 = 𝑑𝑆 ∙ 𝑙, 𝑑𝑆𝑥𝑧 = 𝑑𝑆 ∙
𝑚, 𝑑𝑆𝑥𝑦 = 𝑑𝑆 ∙ 𝑛.
Тогда уравнение равновесия для сил, действующих на четырехгранник в
проекциях на ось x, запишется в виде:
𝑃𝑛𝑥 ∙ 𝑑𝑆 = 𝑃𝑥𝑥 ∙ 𝑑𝑆 ∙ 𝑙 + 𝑃𝑦𝑧 ∙ 𝑑𝑆 ∙ 𝑚 + 𝑃𝑧𝑥 ∙ 𝑑𝑆 ∙ 𝑛
Аналогичные уравнения можно записать для составляющих сил по соям y и z.
Сокращя в левой и правой частях уравнений dS, имеем окончательно:
1
Ввиду малости грани считаем напряжение на всей грани одинаковым
10
𝑃𝑛𝑥 = 𝑃𝑥𝑥 ∙ 𝑙 + 𝑃𝑦𝑥 ∙ 𝑚 + 𝑃𝑧𝑥 ∙ 𝑛
𝑃𝑛𝑦 = 𝑃𝑥𝑦 ∙ 𝑙 + 𝑃𝑦𝑦 ∙ 𝑚 + 𝑃𝑧𝑦 ∙ 𝑛
𝑃𝑛𝑧 = 𝑃𝑥𝑧 ∙ 𝑙 + 𝑃𝑦𝑧 ∙ 𝑚 + 𝑃𝑧𝑧 ∙ 𝑛
[1]
Тогда
нормальное
напряжение
на
площадке
найдем,
спроектировав
координатные составляющие на ннормаль к площадке:
𝑃𝑛𝑛 = 𝑃𝑛𝑥 ∙ 𝑙 + 𝑃𝑛𝑦 ∙ 𝑚 + 𝑃𝑛𝑧 ∙ 𝑛
[2]
Полное напряжение определяется по формуле:
𝑃𝑛 = √𝑃𝑛𝑥 2 + 𝑃𝑛𝑦 2 + 𝑃𝑛𝑧 2
[3]
Касательное напряжение равно:
𝑃𝑛𝜏 = √𝑃𝑛2 − 𝑃𝑛𝑛2
[4]
Наибольшее касательное напряжение равно полуразности наибольшего и
наименьшего главных нормальных напряжений:
𝑃12 =
𝑃1 − 𝑃2
2
𝑃13 =
𝑃1 − 𝑃3
2
𝑃23 =
𝑃2 − 𝑃3
2
[5]
Условия равновессия требуют отсуттсвия не только поступательного
движения, но и вращения тела. Составим три других уравнения равновесия
четырехгранника – уравнения моментов. Удлбно взять моменты относительно
прямых, проходящих через центр тяжести C наклонной грани четрыехгранника
11
и параллельных координатным осям. Расстояния точки C от трех граней
четырехгранника соответственно равны
1
3
∙ 𝑑𝑥,
1
3
∙ 𝑑𝑦,
1
3
∙ 𝑑𝑧 . Таким образом
проекции точки С на каждую из граней совпадают с их центрами тяжести. На
(рис.2) изображена одна из прямых, проходящих через точку C и параллельных
координатным осям, - прямая y`, параллельная оси y. Из двенадцати
составялющих сил, действующих на все грани четырехгранника десять либо
пересекают прямую y`, либо параллельны ей.
РИСУНОК 2СОСТАВЛЕНИЕ УРАВНЕНИЙ МОМЕНТОВ
Лишь две касательные силы, соответсвующие напряжениям Pxz и Pzx,
будут создавать моменты. Уравнение моментов относительно прямой y`
запишется так:
12
1
𝑑𝑥
1
𝑑𝑧
𝑃𝑥𝑧 ∙ ∙ 𝑑𝑧 ∙ 𝑑𝑦 ∙
− 𝑃𝑧𝑥 ∙ ∙ 𝑑𝑥 ∙ 𝑑𝑦 ∙
=0
2
3
2
3
[6]
Аналогичным образом запишутся два других равентсва для моментов
относительно прямых, параллельных осям x и z. В результате имеем:
𝑃𝑥𝑧 = 𝑃𝑧𝑥,
𝑃𝑧𝑦 = 𝑃𝑦𝑧,
𝑃𝑥𝑦 = 𝑃𝑦𝑥
[7]
Таким образом, на основании выражений [1] можно утверждать, что
напряженное состояние в данной точке полностью определяетя девятью
величинами: Pxx, Pyy, Pzz, Pxy, Pxz, Pzy, Pyx, Pyz Pzx,Pzy; которые составляют
тензор напряжений:
𝑃𝑥𝑥
[𝑃𝑦𝑥
𝑃𝑧𝑥
𝑃𝑥𝑦
𝑃𝑦𝑦
𝑃𝑧𝑦
𝑃𝑥𝑧
𝑃𝑦𝑧]
𝑃𝑧𝑧
[8]
Тензор напряжения в соответсвии с [7] является симметричным относительно
главной диагонали.
Исследуем как преобразуются составляющие векоторв напряжений при
переходе от системы координат x, y и z к системе x`, y`, z` с началом в той же
точке, но повернутой относительно первой на некоторый угол. Иначе говоря,
выразим составляющие векторов напряжений в новой системе кооорлинат в
через составляющие в старой ситеме.
Возьмем бесконечно малую площадку, перпендикулярную к одной из
новых осей, например x`. На этой площадке действует вектор напряжения Px`.
Его составляющие по старым осям выражаются формулами [1], в которых в
13
данном случае индекс n заменяется на x`. Составляющие Px` по осям x,y,z
соответственно равны:
𝑃𝑥`𝑥 = 𝑃𝑥𝑥 ∙ 𝑙1 + 𝑃𝑦𝑥 ∙ 𝑚1 + 𝑃𝑧𝑥 ∙ 𝑛1
𝑃𝑥`𝑦 = 𝑃𝑥𝑦 ∙ 𝑙1 + 𝑃𝑦𝑦 ∙ 𝑚1 + 𝑃𝑧𝑦 ∙ 𝑛1
𝑃𝑥`𝑧 = 𝑃𝑥𝑧 ∙ 𝑙1 + 𝑃𝑦𝑧 ∙ 𝑚1 + 𝑃𝑧𝑧 ∙ 𝑛1
[9]
Проецируя вектора Px` на какую-нибудь новую ось равна сумме
проекций на эту ось трех его составляющих по старым осям. В частности,
проекция на ось x`т.е Px`x` равна:
𝑃𝑥`𝑥` = 𝑃𝑥`𝑥 ∙ 𝑙1 + 𝑃𝑥`𝑦 ∙ 𝑚1 + 𝑃𝑥`𝑧 ∙ 𝑛1
[10]
Подставляя в [10] выражения [9] для Px`x, Px`y, Px`z, получаем:
𝑃𝑥`𝑥` = 𝑃𝑥𝑥 ∙ 𝑙12 + 𝑃𝑦𝑦 ∙ 𝑚12 + 𝑃𝑧𝑧 ∙ 𝑛12 + 2 ∙ 𝑃𝑥𝑦 ∙ 𝑙1 ∙ 𝑚1 + 2 ∙ 𝑃𝑥𝑧 ∙ 𝑙1 ∙ 𝑛1 + 2
∙ 𝑃𝑦𝑧 ∙ 𝑚1 ∙ 𝑛1
[11]
Аналогичным образом нетрудно получить выражения для всех девяти
составляющих напряжения в новой системе координат. Приведем в качестве
примера выражение для одной из тангенсальных составляющих Pz`x`:
𝑃𝑧`𝑥` = 𝑃𝑥𝑥 ∙ 𝑙3 ∙ 𝑙1 + 𝑃𝑦𝑦 ∙ 𝑚3 ∙ 𝑚1 + 𝑃𝑧𝑧 ∙ 𝑛3 ∙ 𝑛1 + 𝑃𝑦𝑧 ∙ (𝑚3 ∙ 𝑛1 + 𝑛1 ∙ 𝑚3 )
+ 𝑃𝑥𝑦 ∙ (𝑙3 ∙ 𝑚1 + 𝑙1 ∙ 𝑚3 ) + 𝑃𝑧𝑥 ∙ (𝑛3 ∙ 𝑙1 + 𝑛1 𝑙3 )
[12]
Пользуясь законом преобразования компонент напряжений к новым осям,
определим нормальное напряжение на площадке с нормалью 𝜈̅ {𝑙, 𝑚, 𝑛}
14
𝑃𝜈𝜈 = 𝑃𝑥𝑥 ∙ 𝑙 2 + 𝑃𝑦𝑦 ∙ 𝑚2 + 𝑃𝑧𝑧 ∙ 𝑛2 + 2 ∙ 𝑃𝑥𝑦 ∙ 𝑙 ∙ 𝑚 + 2 ∙ 𝑃𝑥𝑧 ∙ 𝑙 ∙ 𝑛 + 2 ∙ 𝑃𝑦𝑧
∙𝑚∙𝑛
[13]
Вычислим длину отрезка 𝑟 = 𝑘⁄
и отложим ее вдоль нормали 𝜈̅ .
|√𝑃𝜈𝜈|
Получим первую точку поверхности напряжения. Выполняя эти операции для
каждого направления нормали ̅𝜈 . Варьируя эти направления по всему
телесному углу (4π), получим бесчисленное непрерывное множество точек –
поверхность напряжений. Уравнение поверхности напряжений:
𝑃𝑥𝑥 ∙ 𝑥 2 + 𝑃𝑦𝑦 ∙ 𝑦 2 + 𝑃𝑧𝑧 ∙ 𝑧 2 + 2 ∙ 𝑃𝑥𝑦 ∙ 𝑥 ∙ 𝑦 + 2 ∙ 𝑃𝑥𝑧 ∙ 𝑥 ∙ 𝑧 + 2 ∙ 𝑃𝑦𝑧 ∙ 𝑦 ∙ 𝑧
= 𝑘2
[14]
15
ДЕФОРМАЦИИ
Если на тело воздействовать внешними силами, то оно изменит свою
форму и объем, т.е. деформируется. Представим себе прямолинейный отрезок
ab в теле до деформации. Под действием внешних сил он может изогнуться, в
некоторых местах оказаться растянутым, а в других сжатым. Описать процесс
деформирования математически здесь практически невозможно, так как
многообразие кривых, в которые может перейти отрезок ab, неограничено.
Однако отрезок ab можно подразделить на такие малые участки, чтобы они
были прямолинейными до и после деформации. При этом ограничении все
многообразие изменений сводится к растяжению или сжатию, к его повороту
или комбинации этих двух изменений. Сохранение в процессе деформирования
прямолинейности малых отрезков возможно лишь при постоянстве величин
деформации в рассматриваемой малой области в окрестностях данной точки.
При таком дифференциальном подходе процесс
деформации может быть
описан математически, могут быть определены относительные каждой точки
тела, как функции её координат.
Пусть две дифференциаольно малые точки среды 𝑀{𝑥, 𝑦, 𝑧} b 𝑁{𝑥 +
𝑑𝑥, 𝑦 + 𝑑𝑦, 𝑧 + 𝑑𝑧} под действием произвольных внешних сил получили свои
̅̅̅̅
̅̅̅̅
векторы смещения: точка 𝑀 − 𝑈
𝑚 (𝑥, 𝑦, 𝑧), точка 𝑁 − 𝑈𝑛 (+𝑑𝑥, 𝑦 + 𝑑𝑦, 𝑧 + 𝑑𝑧).
Поскольку точки M и N дифференциально близки, можно вектор смещения
̅̅̅̅
точки N рзложить в ряд Тейлора, выразив через «опорный» вектор 𝑈
𝑚 .
Пренебрегая в данном разложении величинами порядка малости, больше
первого, получаем:
̅̅̅̅
̅̅̅̅
𝑈
𝑛 = 𝑈𝑚 +
̅̅̅̅
̅̅̅̅
̅̅̅̅
𝜕𝑈
𝜕𝑈
𝜕𝑈
𝑚
𝑚
𝑚
∙ 𝑑𝑥 +
∙ 𝑑𝑦 +
∙ 𝑑𝑧
𝜕𝑥
𝜕𝑦
𝜕𝑧
[15]
̅̅̅̅
̅̅̅̅
Вычислим разность векторов 𝑈
𝑛 и 𝑈𝑚
̅̅̅̅̅
̅̅̅̅
̅̅̅̅
∆𝑈
=𝑈
𝑛 − 𝑈𝑚 =
̅̅̅̅
̅̅̅̅
̅̅̅̅
𝜕𝑈
𝜕𝑈
𝜕𝑈
𝑚
𝑚
𝑚
∙ 𝑑𝑥 +
∙ 𝑑𝑦 +
∙ 𝑑𝑧
𝜕𝑥
𝜕𝑦
𝜕𝑧
16
[16]
Опуская в правой части этого выражения индекс 𝑚, в проекциях на оси
координат запишем:
̅̅̅𝑥̅ =
∆𝑈
̅̅̅̅
̅̅̅𝑥̅
̅̅̅𝑥̅
𝜕𝑈
𝜕𝑈
𝜕𝑈
𝑋
∙ 𝑑𝑥 +
∙ 𝑑𝑦 +
∙ 𝑑𝑧
𝜕𝑥
𝜕𝑦
𝜕𝑧
̅̅̅̅
∆𝑈
𝑦 =
̅̅̅̅
̅̅̅̅
̅̅̅̅
𝜕𝑈
𝜕𝑈
𝜕𝑈
𝑦
𝑦
𝑦
∙ 𝑑𝑥 +
∙ 𝑑𝑦 +
∙ 𝑑𝑧
𝜕𝑥
𝜕𝑦
𝜕𝑧
̅̅̅𝑧 =
∆𝑈
̅̅̅𝑧
̅̅̅𝑧
̅̅̅𝑧
𝜕𝑈
𝜕𝑈
𝜕𝑈
∙ 𝑑𝑥 +
∙ 𝑑𝑦 +
∙ 𝑑𝑧
𝜕𝑥
𝜕𝑦
𝜕𝑧
[17]
Девять производных фигурирующих в [17], полностью определяют
деформацию в рассматриваемой малой области. Их совокупность образует
тензор деформации.
𝑒𝑥𝑥
[𝑒𝑦𝑥
𝑒𝑧𝑥
𝑒𝑥𝑦
𝑒𝑦𝑦
𝑒𝑧𝑦
𝑒𝑥𝑧
𝑒𝑦𝑧 ]
𝑒𝑧𝑧
Допустим, что деформация плоская, т.е. точки M и N, как были так и
остались в плоскости xOy (рис.3 ).
РИСУНОК 3УДЛИНЕНИЕ И СДВИГИ
17
Тогда проекции вектора относительного смещения можно описать так:
̅̅̅𝑥̅ =
∆𝑈
̅̅̅̅
𝜕𝑈
𝑋
∙ 𝑑𝑥,
𝜕𝑥
̅̅̅̅
∆𝑈
𝑦 =
̅̅̅̅
𝜕𝑈
𝑦
∙ 𝑑𝑥,
𝜕𝑥
̅̅̅𝑧 =
∆𝑈
̅̅̅𝑧
𝜕𝑈
∙ 𝑑𝑥
𝜕𝑥
Вычислим относительное удлинение отрезка МN вдоль оси Ox, как
отношение разности проекции отрезка M`N` (после деформации) и отрезка MN
(до деформации) к первоначальной длине этой проекции:
𝑒𝑥𝑥 =
(𝑀`𝑁`)𝑥 − (𝑀𝑁)𝑥 𝜕𝑈𝑥
=
(𝑀𝑁)𝑥
𝜕𝑥
[18]
Значит, одноименные производные компонент вектора относительного
смещения являются относительными удлинениями вдоль координатных осей
Ox, Oy, Oz:
𝑒𝑥𝑥 =
𝜕𝑈𝑦
𝜕𝑈𝑥
𝜕𝑈𝑧
, 𝑒𝑦𝑦 =
, 𝑒𝑧𝑧 =
𝜕𝑥
𝜕𝑦
𝜕𝑧
[19]
Если помимо удлинений (сжатий) рассматриваемый отрезок MN
поворачивается вокруг оси Oz на малый угол α, а отрезок MP2 на малый угол β,
то
возникают
сдвиговые
деформации,
определяемые
мерой
скошеия
первоначально прямого углаPMN, которая выражается через полусумму углов
α и β3:
𝑒𝑥𝑦 =
(𝛼 + 𝛽) 1 𝜕𝑈𝑦 𝜕𝑈𝑥
= ∙(
+
)
2
2 𝜕𝑥
𝜕𝑦
[20]
Отрезок MN может повернуться вокруг оси Oz на угол α не только в следствии деформации, но и вследствии
общего малого вращения плоскости xOy вокруг той же оси. Для различия этих двух видов реакции среды на
внешнее воздействие вводтся отрезок MP параллельный оси Oy.
𝜕Г
𝜕Г
3
Углы α и β в силу их малости можно оценить значением тангенса (𝛼 ≈ tan 𝛼 = н , 𝛽 ≈ tan 𝛽 = ч )
2
𝜕ч
18
𝜕н
Аналогично 𝑒𝑦𝑧 =
1
2
∙(
𝜕𝑈𝑧
𝜕𝑦
+
𝜕𝑈𝑦
𝜕𝑧
) , 𝑒𝑧𝑥 =
1
2
∙(
𝜕𝑈𝑥
𝜕𝑧
+
𝜕𝑈𝑧
𝜕𝑥
)
[21]
В случае различия углов α и β присутствует вращение:
1 𝜕𝑈𝑦 𝜕𝑈𝑥
1 𝜕𝑈𝑧 𝜕𝑈𝑦
1 𝜕𝑈𝑥 𝜕𝑈𝑧
𝜔𝑧= ∙ (
−
−
−
)
) , 𝜔𝑥 = ∙ (
) , 𝜔𝑦 = ∙ (
2
𝜕𝑥
𝜕𝑦
2
𝜕𝑦
𝜕𝑧
2 𝜕𝑧
𝜕𝑥
[22]
Преобразование компонент тензора чистой деформации к новой системе
координат происходит аналогично преобразованию компонент напряжений.
19
СВЯЗЬ МЕЖДУ НАПРЯЖЕНИЕМ И ДЕФОРМАЦИЕЙ
Во многих практически важных случаях упругие свойства среды
одинаковы по всем направлениям.
В однородной изотропной среде
направления главных осей напряжения и деформации совпадают в каждой
точке. Воспользуемся этим обстоятельством для получения уравнений,
связывающих напряжения и деформации.
Направим оси x, y, z параллельно главным осям напряжений. Тогда ввиду
того, что касательные напряжения и сдвиги равны нулю, имеем4:
𝑒1 =
1
𝜎
𝜎
∙ 𝑃1 − ∙ 𝑃2 − ∙ 𝑃3
𝐸
𝐸
𝐸
𝑒2 = −
𝜎
1
𝜎
∙ 𝑃1 + ∙ 𝑃2 − ∙ 𝑃3
𝐸
𝐸
𝐸
𝑒2 = −
𝜎
𝜎
1
∙ 𝑃1 − ∙ 𝑃2 + ∙ 𝑃3
𝐸
𝐸
𝐸
[23]
Преобразуя напряжения по формулам вида [11] и [12], а также учитывая5:
𝐸∙𝜎
𝐸
=𝜆,
= 𝜇,
(1 + 𝜎) ∙ (1 − 2 ∙ 𝜎)
2 ∙ (1 + 𝜎)
1 − 2𝜎
∙ (𝑃𝑥𝑥 + 𝑃𝑦𝑦 + 𝑃𝑧𝑧) = 𝜃
𝐸
[24]
Выпишем выражения для всех компонент напряжения:
𝑃𝑥𝑥 = 𝜆 ∙ 𝜃 + 2 ∙ 𝜇 ∙ 𝑒𝑥𝑥
𝑃𝑦𝑦 = 𝜆 ∙ 𝜃 + 2 ∙ 𝜇 ∙ 𝑒𝑦𝑦
𝑃𝑧𝑧 = 𝜆 ∙ 𝜃 + 2 ∙ 𝜇 ∙ 𝑒𝑧𝑧
𝑃𝑦𝑧 = 2 ∙ 𝜇 ∙ 𝑒𝑦𝑧
𝑃𝑧𝑥 = 2 ∙ 𝜇 ∙ 𝑒𝑧𝑥 ,
𝑃𝑥𝑦 = 2 ∙ 𝜇 ∙ 𝑒𝑥𝑦
[25]
4
5
Закон Гука для главной ситемы координат
λ и μ упругие константы Ламэ, характеризующие упругие свойтсва среды.
20
УПРУГИЕ СВОЙСТВА СРЕДЫ
В абсолютно упругой однородной и изотропной среде в облатсти, где
осутствуют внешние силы воздействия на среду, распространение упругих
(сейсмических) волн описывается линейным дифференциальным уравнением
динамического равновесия Ламэ:
̅
𝜆+2∙𝜇
𝜇
𝜕2 𝑈
̅ + ∙ 𝑟𝑜𝑡 𝑟𝑜𝑡 𝑈
̅=
∙ 𝑔𝑟𝑎𝑑 𝑑𝑖𝑣 𝑈
𝜌
𝜌
𝜕𝑡 2
[26]
̅=𝑈
̅(𝑥, 𝑦, 𝑧, 𝑡) – вектор смещения частиц среды под воздействием
где 𝑈
проходящей волны, изменяющийся воврмени t и пространстве x,y,z; λ и μ –
постоянные Ламэ, определяемые упругими свойствами среды. Константы λ и μ6
можно выразить через хорошо известные и имеющие простой физический
смысл упругие параметры среды – модуль Юнга (E) и коэффициент Пуассона
(σ):
𝜆=
𝐸∙𝜎
,
(1 + 𝜎) ∙ (1 − 2 ∙ 𝜎)
𝜇=
𝐸
2 ∙ (1 + 𝜎)
[27]
Модуль
Юнга
характеризует
сопротивление
упругого
вещества
растягивающей (сжимающей) силы. Он численно равен напряжению, при
котором объемный
элемент вещества
вдвое
растягивается сжимается.
Размерность модуля Юнга совпадает с размерностью напряжения [кг⁄ 2 ]
см
Коэффициент
Пуассона
относительным
поперечным
продольным
удлинением
характеризует
сжатием
соотношение
(растяжением)
(сокращением)
и
между
относительным
объемного
элемента
вещества.Величина σ безразмерная величина изменяется в пределах от 0 до 0,5.
6
Постоянная μ также является модулем сдвига.
21
Если горная порода находится в условиях равномерного всестороннего
сжатия, то связь между напряжениями и относительным изменением её объёма
оценивается модулем всестороннего сжатия
𝑘=
3∗𝜆+2∗𝜇
3
[28]
̅ смещения частиц среды при упругих колебаниях
Векторное поле 𝑈
̅̅̅̅𝑝 и вихревой ̅̅̅
является суммой двух составляющих – потоенциальной 𝑈
𝑈𝑠 .
̅̅̅𝑠 = 𝑟𝑜𝑡 𝑈
̅̅̅̅𝑝 = 0 , то из [27] получается два независимых
Поскольку 𝑑𝑖𝑣𝑈
волновых уравнения:
̅̅̅̅𝑝 =
Δ𝑈
̅̅̅̅𝑝
1 𝜕2 𝑈
∙
𝜐𝑃2 𝜕𝑡 2
̅̅̅𝑠 =
Δ𝑈
1 𝜕 2 ̅̅̅
𝑈𝑠
∙
𝜐𝑠2 𝜕𝑡 2
[29]
Где 𝜐𝑝 и 𝜐𝑠 скорости распространения продольных и поперечных волн
𝜆+2∙𝜇
𝐸 ∙ (1 − 𝜎)
𝜐𝑝 = √
=√
𝜌
𝜌 ∙ (1 + 𝜎) ∙ (1 − 2 ∙ 𝜎)
𝜇
𝐸
𝜐𝑠 = √ = √
𝜌
2 ∙ 𝜌 ∙ (1 + 𝜎)
[30]
22
РЕШЕНИЕ ПОСТАВЛЕННЫХ ЗАДАЧ
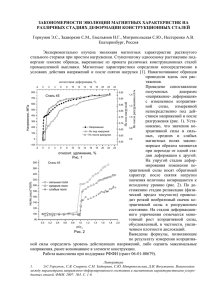
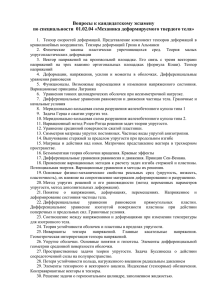
РАСЧЕТ НАПРЯЖЕННОГО СОСТОЯНИЯ
Ввдем систему координат и построим кубический элемент, образованный
координатными площадками. Покажем компоненты напряжений на гранях
этого элемента.
РИСУНОК 4 КОМПОНЕНТЫ НАПРЯЖЕНИЙ НА ГРАНЯХ КУБИЧЕСКОГО ЭЛЕМЕНТА
Найдем компоненты тензора напряжений учитывая формулы [11], [12]
𝑃𝑥𝑥 = 500 ∙ (0,2)2 − 500 ∙ (0,2)2 + 1000 ∙ (0,959)2 = 920 кг⁄ 2
м
𝑃𝑦𝑦 = 500 ∙ (0,4)2 − 500 ∙ (0,4)2 + 1000 ∙ (0,824)2 = 679 кг⁄ 2
м
𝑃𝑧𝑧 = 500 ∙ (0,6)2 − 500 ∙ (0,6)2 + 1000 ∙ (0,529)2 = 280 кг⁄ 2
м
𝑃𝑥𝑦 = 500 ∙ 0,2 ∙ 0,4 − 500 ∙ 0,2 ∙ 0,4 + 1000 ∙ 0,959 ∙ 0,824 = 790 кг⁄ 2
м
𝑃𝑥𝑧 = 500 ∙ 0,2 ∙ 0,6 − 500 ∙ 0,2 ∙ 0,6 + 1000 ∙ 0,959 ∙ 0,529 = 507 кг⁄ 2
м
𝑃𝑦𝑧 = 500 ∙ 0,4 ∙ 0,6 − 500 ∙ 0,4 ∙ 0,6 + 1000 ∙ 0,824 ∙ 0,529 = 436 кг⁄ 2
м
23
Запишем тензор напряжений учитывая формулу [8]
920 790 507
[790 679 436]
507 436 280
Найдем компоненты напряжений на площадке с заданной нормалью 𝑛 [1]
𝑃𝑛𝑥 = 920 ∙
𝑃𝑛𝑦 = 790 ∙
1
+ 790 ∙
√3
1
+ 679 ∙
√3
𝑃𝑛𝑦 = 507 ∙
1
√3
1
√3
1
√3
+ 436 ∙
+ 507 ∙
+ 436 ∙
1
√3
1
= 1280 кг⁄ 2
м
√3
1
= 1100 кг⁄ 2
м
√3
+ 280 ∙
1
= 706 кг⁄ 2
м
√3
Вычислим нормальное, полное и касательное напряжение в соответсвии с
формулами [2], [3], [4]
𝑃𝑛𝑛 = 1280 ∙
1
√3
+ 1100
1
√3
+ 706
1
= 1782 кг⁄ 2
м
√3
𝑃𝑛 = √12802 + 11002 + 7062 = 1829 кг⁄ 2
м
𝑃𝑛𝜏 = √18292 − 17822 = 412 кг⁄ 2
м
Учитывая [5] запишемзначения главных касательных напряжений
𝑃12 =
500 − (−500)
= 500 кг⁄ 2
м
2
𝑃13 =
500 − 1000
= −250 кг⁄ 2
м
2
𝑃23 =
−500 − 1000
= −750 кг⁄ 2
м
2
24
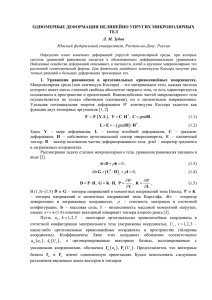
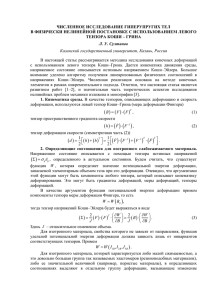
Построим полную круговую диаграмму для заданного напряжённого состояния
РИСУНОК 5 КРУГОВАЯ ДИАГРАММА НАПРЯЖЕННОГО СОСТОЯНИЯ
Сечение кубика, образованного главными площадками, напряжения в
котором равны координатам Pnn, Pnt.
РИСУНОК 6 СЕЧЕНИЕ КУБИКА, ОБРАЗОВАННОГО ГЛАВНЫМИ ПЛОЩАДКАМИ
25
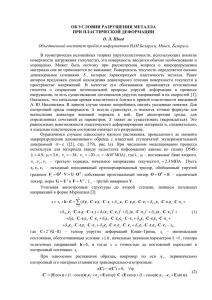
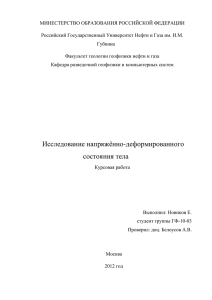
Построим поверхность напряжений в соответствии с [14]
РИСУНОК 7 ПОВЕРХНОСТЬ НАПРЯЖЕНИЙ
26
РАСЧЕТ ДЕФОРМИРОВАННОГО СОСТОЯНИЯ
Определим главные удлинения по формуле [23]
𝑒1 = 5,8 ∙ 10−9 м,
𝑒2 = 17,4 ∙ 10−9 м,
𝑒3 = 17,5 ∙ 10−9 м
Найдем компоненты тензора деформаций учитывая, что преобразование
компонент тензора чистой деформации к новой системе координат происходит
аналогично преобразованию компонент напряжений.
𝑒𝑥𝑥 = 1,702 ∙ 10−8
𝑒𝑥𝑦 = 1,568 ∙ 10−8
𝑒𝑦𝑦 = 1,559 ∙ 10−8
𝑒𝑥𝑧 = 1,166 ∙ 10−8
𝑒𝑧𝑧 = 1,325 10−8
𝑒𝑦𝑧 = 1,32 ∙ 10−8
Запишем тензор дфеормаций
1,702 ∙ 10−8
[1,568 ∙ 10−8
1,166 ∙ 10−8
1,568 ∙ 10−8
1,559 ∙ 10−8
1,32 ∙ 10−8
1,166 ∙ 10−8
1,32 ∙ 10−8 ]
1,325 10−8
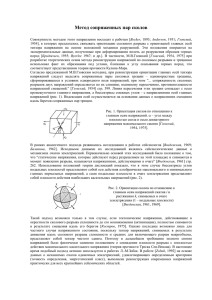
Изобразим компоненты деформации графически на кубическом элементе,
образованном координатными площадками
РИСУНОК 8 КОМПОНЕНТЫ ДЕФОРМАЦИЙ НА ГРАНЯХ КУБИЧЕСКОГО ЭЛЕМЕНТА
27
Определим деформации на площадке с заданной в условии нормалью
𝑛{
𝑒𝑛𝑥 = 2,561 ∙ 10−8
1
,
1
,
1
}
√3 √3 √3
𝑒𝑛𝑦 = 2,567 ∙ 10−8 𝑒𝑛𝑧 = 2,2 ∙ 10−8
𝑒𝑛𝑛 = 4.231 ∙ 10−8
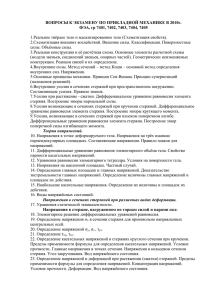
Построим поверхность деформаций
РИСУНОК 9 ПОВЕРХНОСТЬ ДЕФОРМАЦИЙ
28
РАСЧЕТ УПРУГИХ ПАРАМЕТРОВ
Скорость распространения продольных волн 4550 м/с
Скорость распространения поперечных волн 2300 м/с
Минеральная плотность 2680 кг/м3
Коэффициент Пуассона 0,33
Модуль Юнга 5,7∙1010 Па
Найдем коэффициенты Ламэ учитывая формулу [27]
𝜆 = 4,16 ∙ 1010 н⁄ 2
м
𝜇 = 2,143 ∙ 1010 н⁄ 2
м
Вычислим модуль всестороннего сжатия [28]
𝑘 = 5,589 ∙ 1010 Па
Определим модуль сдвига
𝐺 = 2,143 ∙ 1010 Па
29
ЗАКЛЮЧЕНИЕ
Курс теории упругости и прикладной механики, является связующим
звеном между общетеоретическими дисциплинами, такими как физика и
математика, и специальным предметом – сейсморазведкой. В процессе
обучения нами были получены теоретические и практические знания,
закреплению которых поспособствовала данная курсовая работа, ходе которой
были выполнены поставленные задачи и получены конкретные результаты.
30
СПИСОК ЛИТЕРАТУРЫ
1. Альпин. Л.М., Теория полей, применяемых в сейсморазведке. Учебник
для вузов. – М., Недра, 1985. - 407 с.
2. Боганик Г.Н., Гурвич И.И. Сейсморазведка. Учебник для вузов. – Тверь,
АИС,2006. – 744 с.
3. Сердобольский. Л.А. Конспект лекции по части 1 курса "Геофизические
методы (сейсморазведка)". Основы теории деформаций. М., РГ'У нефти и
газа, 1999. – 29 с.
4. Сердобольский. Л.А. Конспект лекции по части 2 курса "Геофизические
методы (сейсморазведка)". Основы теории напряжений. М., РГ'У нефти и
газа, 1999. – 21 с.
5. Сердобольский Л.А. Конспект лекций по части 3 курса «Геофизические
методы (сейсморазведка)». Закон Гука и волновое уравнение, М., РГУ
нефти и газа, 1999. – 26с.
31