Как правило, при анализе колебаний ПМКС вычисления ξm , ξ`m
реклама

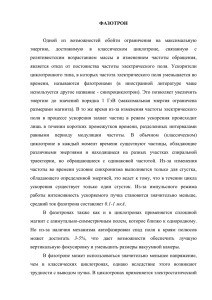
Как правило, при анализе колебаний ПМКС вычисления ξm , ξ'm , ξ''m по формулам (1.8) , (1.9), (1.10) можно заменить приближенными расчетами из условия, что влияние одного из параметров системы является преобладающим в данной частотной области. Рассмотрим с этой точки зрения три характерных случая. С и с т е м а, у п р а в л я е м а я у п р у г о с т ь ю ( рис. 1.7, зона I ) Рис.1.7 Графики частотных зависимостей колебательных смещения ξm , скорости ξ'm и ускорения ξ''m в простой механической колебательной системе В случае если система управляется упругостью, можно считать, что упругая составляющая полного механического импеданса преобладает над двумя другими составляющими, активной и инерционной. То есть выполняются неравенства (1/ωс) >> r и (1/ωс) >> ωm. Эти условия справедливы для области частот ω << ω0. Тогда z ≈ (1/ωс) и ξm = ξ'm ξ''m Fm ------------ = Fmс ωz Fm = ------- = Fm ωc z ω Fm = -------- = ω2 Fm c z Графики частотных зависимостей ξm , ξ'm и ξ''m показаны на рис. 1.7 ( зона I).. К особенностям системы, управляемой упругостью, относятся: - независимость от частоты амплитуды смещения, - прямо пропорциональная зависимость от частоты амплитуды скорости, - квадратичная зависимость от частоты амплитуды ускорения. Применение систем, управляемых упругостью: по принципу работы и, следовательно, конструирования это конденсаторные микрофоны, электростатические громкоговорители и др. С и с т е м а, у п р а в л я е м а я м а с с о й ( рис. 1. 7, зона III ) В случае, когда система управляется массой, можно считать, что инерционная составляющая полного механического импеданса преобладает над двумя другими составляющими, активной и упругой. То есть выполняются неравенства ωm >> r и ωm >> (1/ωс) Эти условия справедливы для области частот ω >> ω0. Тогда z ≈ ωm и ξm = Fm Fm -------- = -------ωz ω2 m ξ'm Fm Fm = ------- = ------z ωm ξ''m ω Fm Fm = -------- = -----z m Графики частотных зависимостей ξm , ξ'm и ξ''m показаны на рис. 1.7 ( зона III ). К особенностям системы, управляемой массой, относятся: - независимость от частоты амплитуды ускорения, - обратно пропорциональная зависимость от частоты амплитуды скорости, -обратно пропорциональная квадрату частоты зависимость амплитуды смещения. Применение систем, управляемых упругостью: такими системами по принципу работы и конструирования являются диффузорные громкоговорители, ленточные микрофоны и др. С и с т е м а, у п р а в л я е м а я а к т и в н ы м с о п р о т и в л е н и е м ( рис. 1. 7, зона II). В случае, когда система управляется активным сопротивлением, можно считать, что активная составляющая полного механического импеданса преобладает над реактивной, то есть выполняется неравенство r > /(ωm - 1/ωc) / Это условие выполняется в области частот вблизи резонансной ω0, то есть ω ≈ ω0 ± ∆ω. Тогда z ≈ r и Fm Fm ξm = -------- = -------ωz ωr ξ'm Fm Fm = ------- = ------z r ξ''m ω Fm ω Fm = -------- = -----z r Графики частотных зависимостей ξm , ξ'm и ξ''m показаны на рис. 1.7 ( зона II ). Нетрудно заметить, что амплитуды ξm , ξ'm и ξ''m на частоте резонанса ω0 определяются величиной активного сопротивления r. Рассмотрим несколько случаев: а) r → 0. Тогда амплитуды ξm , ξ'm и ξ''m на частоте резонанса ω0 стремятся к бесконечности; б) 0 < r < r0 ( напомним, что r0 – характеристическое сопротивление ). В этом случае амплитуды ξm , ξ'm и ξ''m имеют резонансный выброс конечной величины; в) r = r0 = ω0 m = 1/(ω0 c) = (m / c)1/2. Определим значения ξm0 , и ξ''m0 на резонансной частоте для этого случая. Fm Fm ω0 c ξm0 = ------ = ------------- = Fm c = ξmн ω0 r 0 ω0 Fm ω0 Fm ω0 Fm ξ''m0 = -------- = ------------- = ----- = ξ''mв r0 ω0 m m Полученные соотношения показывают, что при r = r0 амплитуды смещения ξm0 и ускорения ξ''m0 на резонансной частоте равны соответственно амплитуде смещения ξmн в области управления ПМКС упругостью и амплитуде ускорения ξ''mв в области управления массой. Иначе, если r = r0, то амплитуда смещения в колебательной системе, практически не зависит от частоты до частоты ω, равной резонансной ω0, а амплитуда ускорения, практически не зависит от частоты от ω = ω0. Эти факторы являются весьма существенными при определении конкретных параметров реальных конструкций электроакустических аппаратов. Вообще же можно сказать, что в области частот ω < ω0 /2 система управляется упругостью (зона I, или зона Гука) ; в области частот ω > 2 ω0 система управляется массой ( зона III, или зона Ньютона); при r ≥ r0 система управляется активным сопротивлением в частотном диапазоне ( зона II ), ширина которого ∆ω определяется заданной величиной М неравномерности частотной характеристики колебательной скорости ξ'm ( см. график частотной зависимости ξ'm на рис. 1.7 ). М = ξ'm0 / ξ'mгр , где М – коэффициент частотных искажений в колебательной системе; ξ'm0 – амплитуда колебательной скорости на частоте резонанса; ξ'mгр – амплитуда колебательной скорости на ωн и ωв ( границах диапазона управления системы активным сопротивлением). В качестве примера определим ωн и ωв для случая, когда М = 2, а r = r0 = = ω0 m = 1/(ω0 c). Известно, что ξ'm0 ξ'mн Fm = -------, а r0 = F m ωн c . Поскольку М = ξ'm0 / ξ'mн = Fm / r0 Fm ωн c = 2, то ωн = 1/ 2с r0, или ωн = ω0/ 2 , если принять r0 = 1/(ω0 c). Известно также, что Fm ξ'm = ------ωв m В этом случае М = ξ'm0 / ξ'mв = Fm ωв m / r0 Fm = 2, откуда ωв = 2ω0 , если принять r0 = ω0 m. Таким образом, если в колебательной системе активное сопротивление r = r0 , то при М = 2 она управляется активным сопротивлением в диапазоне частот от ωн = ω0/ 2 до ωв = 2ω0. При f0 = 500 Гц ( f0 = ω0/ 2π ) весь диапазон составит область от 250 Гц до 1000 Гц. г) r > r0. В этом случае диапазон управления системы активным сопротивлением расширяется. Однако при этом уменьшается абсолютное значение амплитуды колебательной скорости, что уменьшает чувствительность системы. Кроме того, следует помнить, что при r = 2r 0 = rкр в свободных колебаниях системы наступает апериодический режим. Особенностями системы, управляемой активным сопротивлением можно считать: - независимость от частоты амплитуды колебательной скорости, - прямо пропорциональная зависимость от частоты амплитуды ускорения, - обратно пропорциональная зависимость от частоты амплитуды смещения. Системы, управляемые активным сопротивлением, нашли применение в электродинамических катушечных микрофонах, рупорных громкоговорителях и др. Остановимся более подробно на перечне диссипативных факторов ПМКС, поскольку от их величин в существенной степени зависит ход частотных зависимостей выходных характеристик электроакустической аппаратуры. В качестве основного фактора диссипативности колебательной системы можно считать величину активного механического сопротивления r = Fm / ξ'm. Другим важным фактором диссипативности является коэффициент потерь η = r / r0, который показывает, какую долю составляет активное сопротивление системы от характеристического. Коэффициент потерь η можно также представить как η = r / ω0m = r ω0 c. При r →0 η→0, при r = r0 η = 1, при r = rкр η = 2. Реальные значения коэффициента потерь в электроакустической аппаратуре составляют величины 0,5 – 1,8. Величина η может также считаться нормированной формой активного сопротивления системы: r0 – нормирующий коэффициент, позволяющий выразить полный механический импеданс ПМКС в безразмерной форме z'н : z'н = z'/ r0 = [ r + j (ωm - 1/ω c)] / r0 = r/ r0 + j ( ω/ω0 – ω0/ω ) = = η + j ( ν – 1/ν ) (1.16) В этой формуле ν = ω/ω0 - безразмерная или нормированная частота. Безразмерный или нормированный модуль полного механического импеданса ПМКС zн можно выразить так: zн = [η2 + ( ν – 1/ν )2]1/2 (1.17) Напомним также, что для отображения диссипативных свойств колебательной системы используются еще два фактора. Это коэффициент затухания собственных колебаний ПМКС δ = r / 2m и логарифмический декремент затухания d = δ T (cм. п.1.2.1). Все коэффициенты можно выразить один через другой. Например, η = 2 δ / ω0 , d = π η/ ( 1 - η2/4)1/2 (1.18) 1.4 Акустическая колебательная система (АКС). Резонатор Гельмгольца Акустическая колебательная система принципиально ничем не отличается от механической. Разница заключается лишь в том, что все ее параметры rв, mв, св формируются из колеблющегося воздуха. Рассмотрим один из элементов АКС и определим характер реакции, создаваемой воздухом, заключенным в объеме V при колебаниях поршня площадью S.