3. Расчет плоской статически неопределимой рамы
реклама

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Тольяттинский государственный университет
Кафедра «Материаловедение и механика материалов»
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
«Расчеты статически неопределимых
систем в условиях изгиба»
Тольятти 2005
УДК 539.3/.6
ББК 30.121
Р 248
Авторы–составители: доцент Е.П.Гордиенко, старший преподаватель И.Т.Каратеева, старший
преподаватель И.В.Котова
Редактор: Ю.М.Сидорова
Под общей редакцией к.т.н., доцента Гавриловой Т.Ф.
Расчеты статически неопределимых систем в условиях изгиба: /Лабораторный практикум/
Составители: Е.П.Гордиенко, И.Т.Каратеева, И.В.Котова/под ред. к.т.н., доцента Гавриловой
Т.Ф. Тольятти: ТГУ, 2005.–48 с.
Пособие предназначено для изучения студентами темы «расчеты статически неопределимых
систем в условиях изгиба» в курсе сопротивления материалов и охватывает цикл из четырех
лабораторно-практических работ. Теоретическая часть методического пособия кроме общих
сведений содержит примеры по расчету статически неопределимых систем, схемы которых
аналогичны лабораторным установкам. Пособие содержит методику проведения лабораторных
работ, порядок обработки результатов испытаний и сравнения их с аналитически
рассчитанными значениями для оценки адекватности расчетных формул. В приложение к
пособию включены необходимые справочные сведения, краткий перечень основных терминов и
понятий, карточка тестового контроля. Для подготовки к отчету по данному циклу
лабораторно-практических работ приводятся контрольные вопросы и библиографический
список.
Утверждено научно-методическим советом Тольяттинского государственного университета
© Тольяттинский государственный университет, 2005
2
Содержание
Введение. Цель и задачи цикла лабораторно-практических работ «Исследование статически неопределимых
систем» .............................................................................................................................................................................. 4
1. Раскрытие статической неопределимости по методу сил......................................................................................... 5
2. Выбор основной системы ............................................................................................................................................ 8
3. Расчет плоской статически неопределимой рамы ................................................................................................... 12
4. Использование свойств симметрии........................................................................................................................... 15
5. Расчет перемещений в статически неопределимых системах ................................................................................ 18
6. Раскрытие статической неопределимости на арках с криволинейной осью......................................................... 19
7. Заключение. Контрольные вопросы ......................................................................................................................... 23
8. Лабораторно-практическая работа №1. «Определение момента защемления однопролетной статически
неопределимой балки» ................................................................................................................................................... 24
8.1. Определение момента защемления по методу сил ......................................................................................... 24
8.2. Порядок проведения эксперимента .................................................................................................................. 25
8.3. Обработка экспериментальных данных........................................................................................................... 26
8.4. Определение процента отклонение между теоретическими и экспериментальными результатами.
Выводы....................................................................................................................................................................... 26
9. Лабораторно-практическая работа №2. «Определение усилия распора статически неопределимой
криволинейной арки» ..................................................................................................................................................... 27
9.1. Определение усилия распора по методу сил ................................................................................................... 27
9.2. Порядок проведения эксперимента .................................................................................................................. 28
9.3. Обработка экспериментальных данных........................................................................................................... 29
9.4. Определение процента отклонение между теоретическими и экспериментальными результатами.
Выводы....................................................................................................................................................................... 29
10. Лабораторно-практическая работа №3. «Определение усилия распора в статически неопределимой раме». 30
10.1. Определение усилия распора по методу сил ................................................................................................. 30
10.2. Порядок проведения эксперимента ................................................................................................................ 31
10.3. Обработка экспериментальных данных ......................................................................................................... 32
10.4. Определение процента отклонение между теоретическими и экспериментальными результатами.
Выводы....................................................................................................................................................................... 32
11. Лабораторно-практическая работа №4. «Определение перемещений в статически неопределимом
замкнутом контуре» ....................................................................................................................................................... 33
11.1. Теоретическое определение деформаций замкнутого контура ................................................................... 33
11.2. Порядок проведения эксперимента ................................................................................................................ 34
11.3. Обработка экспериментальных данных ......................................................................................................... 35
11.4. Определение процента отклонение между теоретическими и экспериментальными результатами.
Выводы....................................................................................................................................................................... 36
Приложение 1. Основные термины и понятия............................................................................................................. 37
Приложение 2. Справочные сведения .......................................................................................................................... 38
Приложение 3. Карточка тестового контроля.............................................................................................................. 39
Библиографический список ........................................................................................................................................... 40
3
Введение. Цель и задачи цикла лабораторнопрактических работ «Исследование статически
неопределимых систем»
Цель: освоить технологию раскрытия статической неопределимости по методу сил,
технологию определения перемещений в статически неопределимых системах, а также оценить
адекватность математических моделей используемых в расчетах.
Задачи:
1. Ознакомиться с теоретической частью цикла
2. Отработать технологию раскрытия статической неопределимости по методу сил при
изгибе балок, выполнив работу №1
3. Изучить особенности расчета для статически неопределимых стержней с криволинейной
осью, выполнив работу №2
4. Закрепить использование свойств симметрии при раскрытии статической
неопределимости, выполнив работы №3 и 4
5. Выделить особенности расчета перемещений для статически неопределимых систем,
выполнив работу №4
4
1. Раскрытие статической неопределимости по методу
сил
Стержневые системы, для которых все реакции в связях закрепления, а также внутренние
усилия в элементах системы могут быть определены из уравнений равновесия, называются
статически определимыми.
Статически НЕопределимыми называются системы, для которых общее количество
реакций в связях закрепления, а также внутренних усилий в элементах системы, превышает
число независимых уравнений статического равновесия. Таким образом, часть связей является
как бы лишней, а усилия, возникающие в них, являются лишними неизвестными для уравнений
статики.
Общее число лишних неизвестных усилий (как внешних, так и внутренних) называют
степенью статической неопределимости.
Если при расчете статически неопределимых систем в качестве неизвестных принимают
силовые факторы, то такой способ называют – методом сил.
Сущность метода сил заключается в том, что лишние связи раскрепляют, заменяя их
неизвестными усилиями. Новая система, полученная таким образом, носит название
эквивалентной. Для неё составляют систему канонических уравнений метода сил. Каждое из
уравнений системы отображает физическое отсутствие перемещений раскрепленных точек в
направлении снятых связей. Количество таких уравнений должно быть равно количеству
лишних неизвестных. Лишние неизвестные усилия обозначаются Х1, Х2,…,Хn, соответственно
их количеству.
Для расчета степени статической неопределимости плоских стержневых систем
существует следующее выражение:
S=3k+n-m
где k – число жестких замкнутых контуров, образованных элементами системы;
n – число реакций во внешних связях закрепления;
m – число независимых уравнений статики.
Число жестких замкнутых контуров умножено на 3, потому что в каждом таком контуре
имеются три внутренние связи (три внутренних силовых фактора).
На рис.1 представлена балка статически неопределимая относительно внешних связей
закрепления. Количество опорных реакций n=5, а число независимых уравнений статики для
плоской системы m=3. Жестких замкнутых контуров система на рис.1 не имеет. Степень
статической неопределимости для неё может быть определена следующим образом:
S=n-m=5-3=2
Исходная Система
Эквивалентная Система
F
F
YA
YB
XA
X1
X2
Рис. 1. Система статически неопределимая относительно внешних связей
Данная балка дважды статически неопределима. Это значит, что две опорные реакции могут
быть представлены, как лишние неизвестные усилия Х1 и Х2. Для решения будет составлено два
условия эквивалентности, в которых будут использованы Х1 и Х2. Таким образом,
дополнительно будет получена система из двух уравнений с двумя неизвестными. Решением
этой системы будут численные значения лишних неизвестных усилий.
Схема, представленная на рис.2, содержит один жесткий замкнутый контур (k=1), имеет три
опорные реакции (n=3), число независимых уравнений статики равно трем (m=3). Рассчитаем
степень статической неопределимости:
5
S=3k+n-m=3*1+3-3=0
Исходная Система
Эквивалентная Система
X2
F
X3
X3
X2
F
X1
YA
X1
YB
XA
Рис. 2. Система статически неопределимая относительно внутренних связей жесткого контура
Данная схема трижды статически неопределима. В качестве лишних неизвестных усилий
выступают внутренние силовые факторы жесткого замкнутого контура. В этом случае
необходимо составить систему из трех уравнений метода сил с тремя неизвестными Х1, Х2, Х3.
Решением этой системы будут числовые значения внутренних силовых факторов жесткого
замкнутого контура.
В рассмотренных примерах выбор связей в качестве лишних был очевиден, но для более
сложных случаев существуют специальные правила, которые мы рассмотрим в п. 3. Выбор
основной системы.
В заключение, приведем алгоритм раскрытия статической неопределимости по методу
сил:
1. Установить степень статической неопределимости исходной системы.
2. Путем отбрасывания лишних связей и факторов внешнего воздействия, заменить
исходную систему на статически определимую, которую называют основной системой.
3. Нагрузить основную систему заданными внешними нагрузками и лишними неизвестными
усилиями Х1, Х2,…Хn, заменяющими действие отброшенных связей, и получить, таким
образом, эквивалентную систему.
4. Записать систему канонических уравнений метода сил для эквивалентной системы,
приравняв нулю перемещения раскрепленных точек в направлении снятых связей. Например,
если степень статической неопределимости равна трем, то система канонических уравнений
метода сил выглядит так:
⎧δ11X1 + δ12 X 2 + δ13 X 3 + δ 1F = 0
⎪
⎨δ 21X1 + δ 22 X 2 + δ 23 X 3 + δ 2F = 0
⎪δ X + δ X + δ X + δ = 0
32 2
33 3
3F
⎩ 31 1
Слагаемые δ1F, δ2F, δ3F представляют собой грузовые перемещения, а коэффициенты при
неизвестных δij – единичные перемещения основной системы. Причем первый индекс
означает номер лишнего неизвестного, а второй – причину, вызывающую перемещение.
5. Определить грузовые и единичные перемещения основной системы. При чем грузовые
перемещения основной системы определяют под действием внешних нагрузок, по направлению
каждой из отброшенных связей. Для того, чтобы определить единичные перемещения,
необходимо поочередно нагрузить основную систему единичными силовыми факторами,
приложенными вместо неизвестных усилий Х1, Х2,… Определение перемещений для основной
системы производят по методу Мора:
M ki ⋅ M k j
M k F ⋅ M ki
dz
dz; δ i j = ∑ ∫
δ iF = ∑ ∫
EJ x k
EJ x k
k lk
k lk
6
6. Решить систему канонических уравнений метода сил, найти числовые значения
неизвестных усилий Х1, Х2,…
7. Провести деформационную проверку правильности раскрытия статической
неопределимости. Для этого определить все остальные усилия в связях закрепления и
построить эпюры внутренних силовых факторов в элементах системы. После чего вычислить
перемещения эквивалентной системы в раскрепленных точках, по направлению действия
лишних связей. Такие перемещения должны быть равны нулю в силу их невозможности для
исходной системы. При выполнении деформационной проверки рекомендуется выбрать другую
основную систему, чем использованная в решении. Погрешность в расчетах не должна
превышать 3%.
После раскрытия статической неопределимости построение эпюр внутренних силовых
факторов, подбор сечений, проверку на прочность производят обычными способами.
7
2. Выбор основной системы
Немаловажным в методе сил является этап выбора основной системы. Здесь необходимо
придерживаться определенных правил.
Основной системой называется геометрически неизменяемая статически определимая
система, получаемая из исходной статически неопределимой системы, в результате
отбрасывания лишних связей. Удалить лишние связи можно тремя способами:
- путем удаления опорных стержней в шарнирных опорах (Удаление одного опорного стержня
эквивалентно удалению одной связи);
- путем врезания шарниров (врезание одиночного шарнира эквивалентно удалению одной
связи. Одиночным называют шарнир, соединяющий два стержня);
- путем разрезания стержня, что эквивалентно удалению трех связей.
Рассмотрим пример выбора основной системы для рамы, показанной на рис.3а). Во-первых,
найдем степень статической неопределимости: рама имеет пять внешних опорных связей (n=5),
замкнутого жесткого контура не содержит, число независимых уравнений статики равно трем
(m=3).
S=n–m=5–3=2
Рама на рис.3а) дважды статически неопределима, т.е., для получения основной системы, мы
должны отбросить две связи в опорах закрепления. Варианты удаления связей, показанные на
рис.3б) и 3в) выбраны неудачно, т.к. в результате получены геометрически изменяемые
системы, иначе говоря, получились подвижные конструкции – механизмы. Чтобы избежать
подобной ошибки при выборе основной системы необходимо следить, чтобы линии действия
опорных реакций не оказались параллельны одной оси, как на рис.3б), и не пересекались в
одной точке, как на рис.3в) в т.А.
8
Геометрически изменяемые системы
Исходная Система
а)
F
в)
б)
F
F
A
Варианты основных систем (геометрически неизменяемые)
Рис. 3. Выбор основной системы
Остальные варианты основных систем, представленные на рис.3 могут быть использованы
при раскрытии статической неопределимости исходной рамы рис.3а). Окончательный результат
после раскрытия статической неопределимости не зависит от варианта выбранной основной
системы.
Сравним ход решения двух различных основных систем для балки рис.4. Найдем степень
статической неопределимости: исходная балка имеет четыре внешних опорных связи (n=4),
число независимых уравнений статики равно трем (m=3).
S=n–m=4–3=1
9
б) основная система – балка на
двух опорах
а) основная система – консольная
балка
q
X1
q
F=2q⋅a
A
F=2q⋅a
A
B
a
a
X1
a
a
B
a
a
деформация основной системы под действием внешних нагрузок
q
δ1F
1
q
F
F
деформация основной системы под действием
единичных силовых факторов
δ 11
0,75q⋅a2
грузовые эпюры изгибающих моментов
MF
0,5q⋅a2
2
1,5q⋅a
δ1F
δ 11
m1 =1
0,5q⋅a2
4,5q⋅a2
единичные эпюры изгибающих моментов
2a
a
M1
1
суммарные эпюры изгибающих моментов
0,5q⋅a2
0,5q⋅a2
MΣ
0,5q⋅a
2
0,5q⋅a2
2
0,5q⋅a
δ 1F=–5,33·qa4 /EJ
δ11 =2,67·a3 /EJ
X1 =2·qa
0,5q⋅a2
δ1F=–0,33·qa3 /EJ
δ11 =0,67·a/EJ
X1 =0,5·qa2
Рис. 4. Сравнение решения для разных основных систем
Исходная балка один раз статически неопределима, т.е. достаточно удалить одну связь.
Первая основная система, рис.4а), получена в результате отбрасывания шарнирно-подвижной
10
опоры в т. А, и представляет собой консольную балку, лишнее неизвестное усилие – реакция в
отброшенной опоре.
Вторая основная система, рис.4б), образована заменой жесткой заделки в т. В на шарнирнонеподвижную опору. Основная система представляет собой балку на двух шарнирных опорах, в
качестве лишнего неизвестного выступает опорный момент жесткой заделки.
На рис.4 показаны деформации основных систем под действием внешних нагрузок. Для
консольной балки деформации представляют собой линейные вертикальные перемещения в
т.А. Для балки на двух опорах деформации представляют собой углы поворота сечения балки в
шарнирной опоре «В».
Основные системы повлияли на внешний вид грузовых и единичных эпюр, которые были
построены для расчета перемещений по методу Мора. Численные значения перемещений
приведены на рис.4, так же, как и значения лишних неизвестных. Внешний вид «суммарных»
эпюр изгибающих моментов не зависит от основной системы, т.к. «суммарные» эпюры
построены для эквивалентных систем, которые были образованы для одной и той же исходной
системы.
11
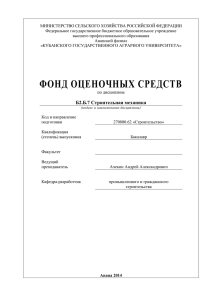
3. Расчет плоской статически неопределимой рамы
Рассмотрим подробный пример раскрытия статической неопределимости для плоской рамы
рис.5.
1. Найдем степень статической неопределимости. Рама, закреплена на двух шарнирно
неподвижных опорах, имеет четыре внешних опорных связи (n=4), число независимых
уравнений статики равно трем (m=3).
S=n–m=4–3=1
Рама один раз статически неопределима.
2. Выбираем основную систему, отбросив вертикальную связь в опоре «В».
3. Образуем эквивалентную систему, приложив к основной системе заданную
распределенную нагрузку q и лишнее неизвестное усилие Х1, заменяющее отброшенную связь.
4. Запишем уравнение метода сил для эквивалентной системы.
δ11 ⋅ X1 + δ 1F = 0
RBX
Y
B
RBX
q=200 н/м
RBY
X1 =41,69 н
0,8 м
0,6 м
300
RAY
RAY
RAX
A
Исходная
система
X
RAX
Основная
система
Эквивалентная
система
Рис. 5. Расчетные схемы к статически неопределимой раме
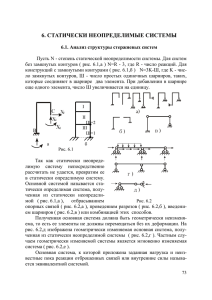
5. Вычислим грузовое δ1F и единичное δ11 перемещения основной системы. Напомним
алгоритм расчета перемещений по методу Мора:
5.1. Построить грузовую эпюру изгибающих моментов МF, нагрузив основную систему
внешней нагрузкой, рис.6а);
5.2. Построить единичную эпюру изгибающих моментов M1, нагрузив основную систему
единичной силой, приложенной вместо лишнего неизвестного Х1, рис.6б);
12
4,5
9
RFB=45
1
н
R
1
B
0,173
9
2,71
0,346
13,5
0,173
R=0
R1 AY
5,42
6,29
R1 AX
RFA=75 н
MF
M1
MΣ
а) Грузовая
эпюра
б) Единичная
эпюра
в) Суммарная
эпюра
Рис. 6. Эпюры к расчету статически неопределимой рамы
5.3. Вычислим перемещения δ1F и δ11 по методу Мора с применением формулы Симпсона:
δ1F = −
1
EJX
1
0,4
⎧0,6
⎫
⋅ (9 ⋅ 0,346+ 4 ⋅ 4,5⋅ 0,173+ 0 ⋅ 0)⎬ = −
⋅ 1,6608 н ⋅ м3
⎨ ⋅ (0 ⋅ 0 + 4 ⋅ 13,5⋅ 0,173+ 9 ⋅ 0,346) +
6
6
EJ
⎩
⎭
X
(
)
значение отрицательное, т.к. грузовая и единичная эпюры расположены по разные стороны от
оси рамы.
1 ⎧0,6
0,4
⎫ 1
2
2
2
2
δ11 =
⋅ 0,0398 ( м3 )
⎨ ⋅ ( 0 + 4 ⋅ 0,173 + 0,346 ) + ⋅ ( 0,346 + 4 ⋅ 0,173 + 0)⎬ =
EJX ⎩ 6
6
EJ
⎭
X
1. Определим значение неизвестного усилия Х1:
δ
− 1,6608
X1 = − 1F = −
= 41,69 н
δ11
0,0398
2. Построим окончательную «суммарную» эпюру изгибающих моментов, рис.6в), для
эквивалентной системы с учетом внешней нагрузки и найденного значения Х1. Термин
«суммарная» соответствует технологии построения окончательной эпюры в результате
графического сложения грузовой эпюры МF с единичной эпюрой М1, все значения которой
умножают на полученную величину Х1. В некоторых случаях такую промежуточную эпюру
строят отдельно и обозначают МX1.
3. Проведем деформационную проверку, определим вертикальное перемещение в т.В для
эквивалентной системы по методу Мора с использование формулы Симпсона. В выражение для
деформационной проверки подставим значения, взятые с «суммарной» и единичной эпюр:
0,4
⎧0,6
⎫
⋅ (−5,42⋅ 0,346− 4 ⋅ 2,71⋅ 0,173+ 0)⎬ =
⎨ ⋅ (0 + 4 ⋅ 6,29⋅ 0,173− 5,42⋅ 0,346) +
6
⎩6
⎭
1 ⎧1
⎫ 1
=
⋅ ⎨ ⋅ (2,612− 2,625)⎬ =
⋅ {0,4353− 0,4375}
EJ ⎩6
⎭ EJ
δB =
1
EJX
Для определения точности решения необходимо сгруппировать значения с разными знаками
и провести оценку погрешности вычислений в процентах по отношению к положительной
составляющей. Максимально допустимая погрешность расчетов не должна превышать 3%.
13
Δ% =
0,4353 − 0,4375
⋅100 % = 0,5 %
0,4353
Погрешность расчетов в нашем примере не более 3%, это означает, что величина
неизвестной вертикальной реакции в опоре «В» найдена верно.
14
4. Использование свойств симметрии
Решение задачи существенно упрощается, если есть возможность выбрать симметричную
основную систему. Рассмотрим это на примере симметрично нагруженного жесткого
замкнутого контура рис.7. Как известно, жесткий замкнутый контур имеет три внутренних
связи. Кроме того, система имеет три внешних связи – реакции закрепления в шарнирных
опорах.
15
Исходная Система
а
Основная Система
Эквивалентная Система
a
RB
B
4a
A
RA
q
X3
X3
X2
4a
Единичные эпюры
4a
2a
X1
X1
4a
4a
2a
X2
4a
1
1
2a
M1
M2
M3
2a
1
2a
X1 =1
1
X3 =1 X3 =1
X2 =1 X2 =1
X1 =1
Грузовая эпюра
2⋅a
2
RA=RB=2q
·a
Суммарная эпюра
RA=2q·a
2q⋅a
2
0,71q⋅a2
0,71q⋅a2
0,29q⋅a2
MF
1,29q⋅a2
X3
2q⋅a2
0,5q⋅a2
RB=2q·a
0,71q⋅a2
2q⋅a2
MΣ
1,29q⋅a2
0,79q⋅a2
0,71q⋅a2
Рис. 7. Особенности расчета при симметричном нагружении
Степень статической неопределимости будет равна:
S=3k+n–m=3·1+3–3=3
Таким образом, для образования основной системы нам необходимо освободиться от трех
лишних связей. Этого можно достигнуть, разрезая один из стержней контура. Чтобы получить
симметричную основную систему, разрез произведем по оси симметрии контура.
16
Все эпюры, построенные в ходе решения, являются симметричными. Причем, одна из
единичных эпюр, построенная для неизвестного поперечного силового фактора Х1, является
КОСО симметричной. Это важно, т.к. результат от перемножения симметричной эпюры на
косо симметричную будет равен нулю. Посмотрим, как это повлияет на ход решения. Запишем
систему канонических уравнений метода сил.
⎧δ11X1 + δ12 X 2 + δ13 X 3 + δ 1F = 0
⎪
⎨δ 21X1 + δ 22 X 2 + δ 23 X 3 + δ 2F = 0
⎪δ X + δ X + δ X + δ = 0
32 2
33 3
3F
⎩ 31 1
Коэффициенты δ12, δ21, δ13, δ31, δ1F, образованные перемножением на косо симметричную
эпюру будут равны нулю, все остальные коэффициенты отличны от нуля. Это существенно
упростит систему:
⎧δ11X1 = 0
⎪
⎨δ 22 X 2 + δ 23 X 3 + δ 2F = 0
⎪δ X + δ X + δ = 0
33 3
3F
⎩ 32 2
Из первого уравнения следует, что первая неизвестная Х1=0. Вторая неизвестная Х2 также
равна нулю, т.к. внешняя нагрузка направленная вертикально уравновешивается реакциями в
опорах. В результате система сводится к одному уравнению:
δ 33 X 3 + δ 3F = 0
Вычислим значения оставшихся коэффициентов используя формулу Верещагина, причем
для расчета коэффициента δ3F значения площадей будем брать с эпюры МF, а с эпюры М3
возьмем значения, соответствующие координатам центров тяжести площадей эпюры МF.
1
{ 1⋅ 2a ⋅1+1⋅ 4a ⋅1+1⋅ 2a ⋅1 } = 16 a
δ 33 = 2 ⋅
EJX
EJX
δ 3F = −2 ⋅
1
EJ X
{
1
3
⋅ 2a ⋅ 2qa2 ⋅ 1 + 4a ⋅ 2qa2 ⋅ 1 + 12 ⋅ a ⋅ 2qa2 ⋅ 1 } = −20,67
qa3
EJ X
Решив единственное условие эквивалентности, получим X3=1,29qa2
Окончательная или «суммарная» эпюра изгибающих моментов (рис.7) также симметрична,
что соответствует исходной системе.
17
5. Расчет перемещений в статически неопределимых
системах
Расчет перемещений в статически неопределимых системах производят по методу Мора, но
предварительно раскрыв статическую неопределимость. Приведем алгоритм расчета
перемещений в статически неопределимых системах:
1. Раскрыть статическую неопределимость по методу сил.
2. Построить эпюры внутренних силовых факторов для эквивалентной системы.
3. Разгрузить эквивалентную систему от внешних сил и найденных лишних усилий, в
результате чего получим основную систему.
4. Приложить единичный силовой фактор, соответствующий искомому перемещению, к
основной системе.
5. Построить на основной системе эпюру изгибающего момента от единичного силового
фактора.
6. Записать интегралы Мора для определения перемещения в эквивалентной системе.
M k Σ ⋅ M k1
Например, при изгибе: δЭКВ = ∑ ∫
dz
EJ x k
k lk
где МkΣ – функция момента, соответствующая окончательной «суммарной» эпюре для
эквивалентной системы;
Мk1–функция момента от единичной силы, приложенной к точке основной системы,
перемещение которой определяется.
q
F=2q⋅a
Исходная система
A
a
перемещения в
эквивалентной
системе
B
a
a
δэкв
F
X1
0,5q⋅a2
MΣ
0,5q⋅a2
0,5q⋅a2
1
0,5a
M1
Рис. 8. Перемещения в статически неопределимых системах
Например, необходимо определить прогиб в точке приложения силы F для балки рис.8.
Окончательная эпюра МΣ была получена ранее. Теперь к основной системе в интересующей нас
точке приложим единичную силу и построим единичную эпюру. Воспользуемся формулой
Симпсона:
δ ЭКВ =
1
EJ X
0,083 qa4
a
⎧a
2
2 ⎫
⎨ 0 + 4 ⋅ 0 + 0,5 a ⋅ 0,5 qa + 0 + 4 ⋅ 0 + 0,5 a ⋅ 0,5 qa ⎬ =
EJ X
6
⎩6
⎭
(
) (
18
)
6. Раскрытие статической неопределимости на арках с
криволинейной осью
Расчет статически неопределимых криволинейных стержней, как и любых других,
выполняют по методу сил. Единственная особенность таких систем заключается в том, что
перемещения, входящие в канонические уравнения, нельзя вычислять по упрощенным
формулам Верещагина или Симпсона. Необходимо записывать интегралы Мора, которые в
этом случае будут содержать тригонометрические функции (см. Приложения)
R·sinϕ
R·cosϕF
a)
ha)
R·sinϕF
R·cosϕ
b)
hb)
M a)
F
F
M b)
ϕF
ϕ
ϕ
ϕF
ha)=R·(cosϕF–cosϕ)
hb)=R·(sinϕ–sinϕF)
Ma)=FR·(cosϕF–cosϕ)
Mb)=FR·(sinϕ–sinϕF)
c)
ϕF
hd)
ϕF
R·cosϕ
ϕ
R·cos ϕF
hc)
R·sinϕF
R·sinϕ
F
d)
F
M c)
ϕ
Md)
hc)=R·(sinϕ–sinϕF)
hd)=R·(cosϕF–cosϕ)
Mc)=FR·(sinϕ–sinϕF)
Md)=FR·(cosϕF–cosϕ)
Рис.9.Выражения для изгибающих моментов на криволинейных стержнях
Напомним, как получить функции изгибающих моментов для криволинейных стержней,
используя метод сечений.
Во-первых, интегрирование ведется по длине дуги, т.к. продольная ось стержня
криволинейна. Длина элементарного отрезка дуги будет обозначена как «dℓ» и равна
произведению радиуса кривизны бруса на величину угла, который будет в данном случае
выполнять роль текущей переменной координаты: dℓ=R·dφ
Во-вторых, длина плеча в выражении момента будет записана с учетом соответствующей
тригонометрической функции, как это показано на примерах рис.9.
19
Интегралы Мора будут иметь следующий вид:
M (ϕ ) ⋅ M k1 (ϕ )
δ kF = ∑ ∫ kF
dA
EJ Xk
k lk
Или
M kF (ϕ) ⋅ M k1 (ϕ)
R ⋅ dϕ
EJ
Xk
ϕ
δ kF = ∑ ∫
k
ПРИМЕР:
На рис.10 представлена статически неопределимая симметрично нагруженная арка,
закрепленная на двух шарнирных опорах. Полный угол дуги арки π/2; радиус кривизны R; угол,
выражающий координату приложения силы ϕ F = π / 12 = 150 .
1. Найдем степень статической неопределимости. Арка на рис.10, также как и рама на
рис.5 закреплена на двух шарнирно неподвижных опорах, имеет четыре внешних опорных
связи (n=4), число независимых уравнений статики равно трем (m=3). S=n–m=4–3=1. Арка один
раз статически неопределима.
2. Выбираем основную систему, отбросив горизонтальную связь в опоре «А».
3. Образуем эквивалентную систему, приложив к основной системе заданные внешние
нагрузки и лишнее неизвестное усилие Х1, заменяющее отброшенную связь.
4. Запишем условие эквивалентности:
δ11 ⋅ X1 + δ 1F = 0
5. Используем свойства симметрии основной системы и запишем функции грузового и
единичного моментов для половины арки, начиная от вертикальной оси, рис.11.
Исходная
Эквивалентная
Основная Система
ϕ
0
cистема
cистема
450
ϕF
0
15
C
F
X1
R
F
π
/2
A
F
F
B
C
YBF
YAF
F
Грузовое состояние.
Основной Системы
F
A
B
C
RB1
1
Единичное состояние.
Основной Системы
A
B
Рис. 10. Расчетные схемы для статически неопределимой арки
Для определения грузового момента перенесем в т. С вертикальную реакцию опоры «А»
YAF=F с соответствующим моментом, рис.11а):
20
MFC=FR(sin450-sin150)=0,4483 FR
Функция грузового момента будет различной на двух участках арки:
- на среднем участке ( 0 ≤ ϕ ≤ ϕ F ) или ( 0 0 ≤ ϕ ≤ 15 0 )
MFC=const=0,4483 FR
- на участке ( ϕ F ≤ ϕ ≤ ϕ 0 ) или (15 0 ≤ ϕ ≤ 45 0 )
M F = 0,4483FR - FR ⋅ (sinϕ − sin150 ) = FR (0,7071 − sinϕ )
MFC=0,4483FR
C
0,4483FR
0,4483FR
0,2071FR
YBF
F
ϕF
B
ϕ0
MF
а)
00
ϕF
B
ϕ0
300
450
0,1589
RB1
M1C=0,2929R
150
0,2588
C
0,2929
1
Грузовая эпюра
M1
б)
Единичная эпюра
X1 =1,554F
0,0461·FR
0
C
YB
–0,0069·FR
F
MΣC=0,0069FR
RB
ϕF
2
π
12
3
1 π
12
12
π
–0,0398·FR
B
ϕ0
MΣ
в)
Суммарная эпюра
Рис. 11. Эпюры для криволинейной арки
Для определения единичного момента перенесем в т.С горизонтальную единичную силу из
опоры «А» с соответствующим моментом, рис.11б):
(
)
M1C = 1 ⋅ R − Rcos450 = 0,2929 ⋅ 1 ⋅ R
Функция единичного момента будет одинакова на всей длине арки.
M1 = 0,2929 ⋅ 1 ⋅ R - 1 ⋅ (R − Rcosϕ ) = 1 ⋅ R (cosϕ − 0,7071)
6. Вычислим грузовое δ1F и единичное δ11 перемещения по методу Мора
21
15
M (ϕ ) ⋅ M 1 (ϕ )
2 ⎪⎧
= −2 ⋅∑ ∫ F
R dϕ = −
⎨ 0,4483FR ⋅ 1 ⋅ R ⋅ (cos ϕ − 0,7071) R dϕ +
EJ X
EJ X ⎪⎩ ∫0
ϕ
0
δ 1F
⎫⎪
2 FR 3
(
)
(
)
−
ϕ
⋅
⋅
⋅
ϕ
−
ϕ
=
−
0
,
7071
sin
1
cos
0
,
7071
0
,
0547
FR
R
R
d
⎬
∫
EJ X
⎪⎭
150
450
+
δ11 = 2 ⋅
450
∫
0
M 1 (ϕ)M 1 (ϕ)
2
R dϕ =
EJ X
EJ X
2R 3
∫ R (cos ϕ − 0,7071) R dϕ = 0,0352 EJ
X
0
450
2
2
7. Найдем значение горизонтальной реакции в шарнирной опоре.
Так, как в значениях грузового и единичного перемещений содержатся одинаковые
множители, то можно сократить их при подстановке в уравнение деформаций.
0,0352*X1-0,0547F=0 отсюда получим Х1=1,554·F
8. Запишем окончательное выражение для изгибающего момента, рис.11в).
Момент, оказывающий сжатие со стороны внутренних волокон арки принимаем за
отрицательный, и наоборот. Тогда получим:
M Σ = M 1 X 1 + M F == −1,554 FR (cos ϕ − 0,7071) + 0,4483FR
150
0
− FR (sin ϕ − sin 15 0 )
9. Проведем деформационную проверку. Определим горизонтальное перемещение
эквивалентной системы в т.А. Оно должно быть равно нулю.
15
M (ϕ ) ⋅ M 1 (ϕ )
2 ⎪⎧
R dϕ =
δA = 2⋅∑∫ Σ
⎨ ∫ [− 1,554 FR (cos ϕ − 0,7071) + 0,4483FR ]1 ⋅ R ⋅ (cos ϕ − 0,7071) R dϕ +
EJ X
EJ X ⎩⎪ 0
ϕ
450
⎫⎪
+ ∫ − 1,554 FR (cos ϕ − 0,7071) + 0,4483FR − sin ϕ −sin 15 0 R (cos ϕ − 0,7071)R dϕ ⎬ =
⎪⎭
150
2 FR 3
{+ 2,1699 − 2,1703}
=
EJ X
0
[
)]
(
Определим процент погрешности расчетов:
Δ% =
2,1699 − 2,1703
⋅100 % = 0,018 %
2,1699
22
7. Заключение. Контрольные вопросы
В теоретической части были приведены краткие сведения о статически неопределимых
системах: даны определения, обоснованы рекомендации по выбору основной системы, записан
алгоритм расчета по методу сил, продемонстрировано влияние свойств симметрии в ходе
решения, показана технология расчета перемещений, а также некоторые особенности в случае
расчета криволинейных стержней. Все представленные примеры, предназначены для того,
чтобы оказать помощь при подготовке к расчету статически неопределимых схем,
соответствующих лабораторных установок.
Для закрепления знаний полученных в ходе изучения теоретического материала,
предлагается ответить на следующие контрольные вопросы:
1. Какая система называется статически неопределимой?
2. Как определить степень статической неопределимости?
3. Каков физический смысл уравнений метода сил?
4. Перечислите алгоритм действий по методу сил.
5. В чем заключается сущность метода сил?
6. Каков физический смысл неизвестных Х1, Х2 и Х3 в уравнениях метода сил?
7. Каков физический смысл грузовых и единичных коэффициентов в уравнениях метода
сил?
8. Как проверить правильность решения по методу сил?
9. Сформулируйте понятие «основная система».
10. Сформулируйте понятие «эквивалентная система».
11. Назовите требования при выборе основной системы.
12. Какая система может называться геометрически неизменяемой?
13. Какой метод для определения перемещений использован в примерах?
14. Запишите формулу Симпсона для упрощенного вычисления интегралов Мора. Назовите
её составляющие.
15. Запишите выражение для жесткости поперечного сечения при изгибе.
16. Перечислите последовательность действий при расчете перемещений статически
неопределимых систем.
17. Для какой системы необходимо построить единичные эпюры при расчете перемещений
в статически неопределимых системах?
18. Какие эпюры используют для определения перемещений в статически неопределимых
системах?
19. Найдите в примерах единичную эпюру, предназначенную для расчета перемещений в
статически неопределимой системе.
20. Назовите размерность эпюры изгибающего момента, построенного от действия
единичной силы.
23
8. Лабораторно-практическая работа №1. «Определение
момента защемления однопролетной статически
неопределимой балки»
Цель работы: экспериментально и теоретически определить значение момента защемления
однопролетной статически неопределимой балки, сравнить полученные результаты и сделать
выводы.
Общая схема занятия
Теоретический расчет момента защемления
Проведение эксперимента
Обработка экспериментальных данных
Определение процента отклонения значений
теоретического расчета от экспериментальных
результатов
Вывод об адекватности математической модели
метода сил
l=800 мм
zi
подвижный
противовес
z0
l0
шарнирно неподвижная
опора
H=67 мм
Q1 =1кГ
шарнирно
подвижная
опора
(Q2 )
Индикатор
часового типа
Подвески
с грузами
(Q2 )
Размеры счения
F1
дополнительные
подвески
F2
h=3 мм
a
a
l1
Y
X
b=40 м
l2
Рис. 12. Схема лабораторной установки СМ-11А
8.1. Определение момента защемления по методу сил
1. Выбрать основную систему (рекомендуемая основная система представлена на рис. 13 а).
2. Построить для основной системы эпюры изгибающих моментов от внешних нагрузок F1 и
F2, и от безразмерной единичной силы или безразмерного единичного момента (рекомендуемые
расчетные схемы для построения «грузовой» и «единичной» эпюр см. на рис. 13 б), в)).
24
3. Вычислить, используя метод Мора, «единичный» – δ11 и «грузовой» – δ1F коэффициенты
для уравнения метода сил.
4. Решить уравнение метода сил, определить неизвестный момент Х1.
5. Построить «суммарную» эпюру для эквивалентной системы («эквивалентная» система,
соответствующая предложенной «основной» системе показана на рис. 13 г).
6. Провести деформационную проверку (процент погрешности вычислений не более 3%).
l=800 мм
l0
а) “основная” система
F1
F2
б) грузовое состояние
“основной” системы
l1
l2
1
M =1
в) единичное состояние
“основной” системы
F2
F1
г) “эквивалентная” система
X1
Рис. 13. Расчетная схема для балки с защемлением
8.2. Порядок проведения эксперимента
1. Для проведения эксперимента взять исходные данные из табл. 1.
Табл. 1.
Варианты условий нагружения
Координата
Величина
Координата
Величина
приложения
нагрузки F2,
приложения
№варианта нагрузкиF1,
силы F2 l2, мм
кг
кг
силы F1 l1, мм
1.1
1,5
1,0
100
500
1.2
2,0
1,5
200
600
1.3
1,0
1,5
300
700
Координата
подвижной
опоры l0, мм
800
800
800
1.4
1.5
1.6
0,5
1,5
1,5
2,5
2,5
2,5
200
300
500
800
800
800
700
700
700
1.7
1.8
1,5
1,0
2,5
2,0
500
400
800
800
600
600
1.9
1,5
2,0
300
700
600
1.10
1,5
1,5
200
700
600
2. Установить подвижную опору и гиревые подвесы в соответствии с расчетной схемой по
своему варианту, придвинуть подвижный противовес Q1 вплотную к неподвижной опоре.
3. Измерить расстояние Z0 по шкале рычаг-линейки и записать это значение в табл. 2
протокола лабораторной работы.
4. До начала нагружения вывести на «0» шкалу индикатора часового типа.
25
5. Нагрузить балку силами F1 и F2. Процесс нагружения должен проходить плавно без
толчков и ударов грузами о подвески. В противном случае результаты испытаний будут не
точными, т.к. не будут соблюдены условия статического нагружения.
6. Плавно перемещать подвижный противовес Q1 до тех пор, пока показание индикатора не
возвратится к нулю. Определить положение Zi противовеса Q1 по шкале рычаг-линейки и
записать это значение в табл. 2 протокола.
7. В случае необходимости для приведения показания индикатора в нулевое положение
использовать дополнительные противовесы Q2.
8. Для получения достоверных результатов испытания, эксперимент повторить не менее
трех раз, для чего установку следует разгрузить, привести подвижный противовес Q1 в
исходное положение, вновь установить индикатор на "0", затем повторить процесс.
9. Разгрузить установку, вернуть подвижный противовес Q1 в исходное положение, снять
грузы Q2 с дополнительных подвесок.
8.3. Обработка экспериментальных данных
(а)
(а)
ΔZ
(Q2 )
(Q2 )
Q1
МОП.=Q1 ·ΔZ
Рис. 14.
1. Определить среднее арифметическое приращение плеча противовеса ΔZ.
2. Согласно схеме показанной на рис.14, определить значение момента защемления,
создаваемого подвижным противовесом Q1, а также противовесами Q2, по расчетной
зависимости: МОП.=Q1ΔZ±Q2·a.
3. Полученный результат занести в табл. 3 протокола.
8.4. Определение процента отклонение между теоретическими и
экспериментальными результатами. Выводы
1. Определить процент погрешности из следующего соотношения:
M оп − М теор
Πm =
⋅ 100% =
M оп
2. Занести полученные результаты в таблицу №3 протокола
3. Сделать вывод о факторах, влияющих на величину погрешности и об адекватности
применяемой математической модели.
26
9. Лабораторно-практическая работа №2. «Определение
усилия распора статически неопределимой
криволинейной арки»
Цель работы: экспериментально и теоретически определить значение усилия распора
статически неопределимой криволинейной арки, сравнить полученные результаты и сделать
выводы.
Общая схема занятия
Теоретический расчет момента защемления
Проведение эксперимента
Обработка экспериментальных данных
Определение процента отклонения значений
теоретического расчета от спериментальных результатов
Вывод об адекватности математической модели метода
сил
9.1. Определение усилия распора по методу сил
1. Выбрать основную систему (рекомендуемая основная система представлена на рис. 16 а).
2. Записать для основной системы функции изгибающих моментов от внешних нагрузок F, и
от безразмерной единичной силы, построить соответствующие эпюры (рекомендуемые
расчетные схемы для построения «грузовой» и «единичной» эпюр см. на рис. 16 б), в)).
3. Вычислить, используя метод Мора, «единичный» – δ и «грузовой» – δ1F коэффициенты
для уравнения метода сил.
4. Решить уравнение метода сил, определить неизвестную реакцию Х1.
27
L=750 мм
ϕ
ΔΓ
подвижный
противовес
H =60
Индикато
р часового
типа
R=530 мм
ϕ
шарнирно
неподвижн
ая опора
z0
подвески с
грузами
zi
h=6 мм
Шарнирно
подвижная
опора
Q1 =1кГ
F
Размеры
сечения
Y
X
b=50 мм
F
Рис. 15. Схема лабораторной установки СМ-31Б
Построить «суммарную» эпюру для эквивалентной системы («эквивалентная» система,
соответствующая предложенной «основной» системе показана на рис. 16 г).
5. Провести деформационную проверку (процент погрешности вычислений не более 3%).
а)
б)
F
1
в)
F
X1
г)
F
F
Рис. 16. Расчетная схема для криволинейной арки
9.2. Порядок проведения эксперимента
1. Для проведения эксперимента из табл. 2 взять исходные данные по своему варианту.
Табл. 2.
Варианты условий нагружения
Координата приложения силы φ,
№варианта
Величина Нагрузки F, кг
рад
2.1
0,5
0
2.2
1,0
0
1
2.3
1,0
/32 π
1
2.4
1,5
/32 π
2
2.5
1,5
/32 π
2
2.6
2,0
/32 π
3
2.7
2,0
/32 π
3
2.8
2,5
/32 π
28
4
2.9
2,5
/32 π
4
2.10
3,0
/32 π
2. Установить гиревые подвесы в соответствии с расчетной схемой по своему варианту,
придвинуть подвижный противовес Q1 вплотную к шарнирной опоре.
3. Измерить расстояние Z0 по шкале рычаг-линейки и записать это значение в табл. 2
протокола лабораторной работы.
4. До начала нагружения вывести на «0» шкалу индикатора часового типа.
5. Нагрузить балку силами F. Процесс нагружения должен проходить плавно без толчков и
ударов грузами о подвески. В противном случае результаты испытаний будут не точными, т.к.
не будут соблюдены условия статического нагружения.
6. Плавно перемещать подвижный противовес Q1 по рычаг-линейке до тех пор, пока
показание индикатора не возвратится к нулю. Определить положение Zi противовеса Q1 по
шкале рычаг-линейки и записать это значение в табл. 2 протокола.
7. Для получения достоверных результатов испытания, эксперимент повторить не менее
трех раз, для чего установку следует разгрузить, привести подвижный противовес Q1 в
исходное положение, вновь установить индикатор на "0", затем повторить процесс нагружения
и уравновешивания подвижным противовесом. Результаты записать в табл.2 протокола.
8. Разгрузить установку, вернуть подвижный противовес Q1 в исходное положение.
H=60 мм
9.3. Обработка экспериментальных данных
RОП.
ΔZ
Q1
МОП.=Q1 ·ΔZ
Рис. 17.
1. Определить среднее арифметическое приращение плеча противовеса Z.
2. Согласно схеме показанной на рис. 17, определить усилие распора, создаваемого
подвижным противовесом Q1, по расчетной зависимости: RОП = Q1 ⋅ ΔZ / H .
3. Полученный результат занести в табл. 3 протокола.
9.4. Определение процента отклонение между теоретическими и
экспериментальными результатами. Выводы
1. Определить процент погрешности из следующего соотношения:
ПR =
R ОП. − R ТЕОР.
⋅100%
R ОП.
2. Занести полученные результаты в таблицу №3 протокола
3. Сделать вывод о факторах, влияющих на величину погрешности и об адекватности
применяемой математической модели.
29
10. Лабораторно-практическая работа №3.
«Определение усилия распора в статически
неопределимой раме»
Цель работы: экспериментально и теоретически определить значение момента защемления
в статически неопределимой раме, сравнить полученные результаты и сделать выводы.
Общая схема занятия
Теоретический расчет момента защемления
Проведение эксперимента
Обработка экспериментальных данных
Определение процента отклонения значений теоретического расчета от
экспериментальных результатов
Вывод об адекватности математической модели метода сил
a
Подвески
с грузами
20.
ΔΓ
F
H=60 мм
Индикатор
часового
типа
0
F
шарнирно
неподвижная
опора
подвижный
противовес
z0
zi
Q1 =1кГ
750 мм
Размеры
сечения
h=6 мм
Шарнирно
подвижная
опора
500 мм
a
Y
X
b=50 мм
Рис. 18. Схема лабораторной установки СМ-34М
10.1. Определение усилия распора по методу сил
1. Выбрать основную систему (рекомендуемая основная система представлена на рис. 19
а).
2. Построить для основной системы эпюры изгибающих моментов от внешних нагрузок F,
и от безразмерной единичной силы (рекомендуемые расчетные схемы для построения
«грузовой» и «единичной» эпюр см. на рис. 19 б), в)).
3. Вычислить, используя метод Мора, «единичный» – δ11 и «грузовой» – δ1F коэффициенты
для уравнения метода сил.
30
4. Решить уравнение метода сил, определить неизвестную реакцию Х1.
5. Построить «суммарную» эпюру для эквивалентной системы («эквивалентная» система,
соответствующая предложенной «основной» системе показана на рис. 19 г).
6. Провести деформационную проверку (процент погрешности вычислений не более 3%)
а)
б)
F
F
в)
г)
1
X1
F
F
Рис. 19. Расчетная схема статически неопределимой рамы
10.2. Порядок проведения эксперимента
1. Для проведения эксперимента из табл. 3 взять исходные данные по своему варианту.
Табл. 3.
Варианты условий нагружения
Координата
Координата
Величина
Величина
№варианта
приложения
№варианта
приложения
нагрузки F, кг
нагрузки F, кг
силы a, мм
силы a, мм
3.1
3,0
100
4.1
3,0
190
3.2
2,5
100
4.2
2,5
190
3.3
3,0
150
4.3
3,0
220
3.4
2,5
150
4.4
2,5
220
3.5
2,5
200
4.5
2,5
250
3.6
2,0
200
4.6
2,0
250
3.7
2,0
250
4.7
2,0
280
3.8
1,5
250
4.8
1,5
280
3.9
1,0
300
4.9
1,0
310
3.10
0,5
300
4.10
0,5
310
2. Установить гиревые подвесы в соответствии с расчетной схемой по своему варианту,
придвинуть подвижный противовес Q1 вплотную к шарнирной опоре.
3. Измерить расстояние Z0 по шкале рычаг-линейки и записать это значение в табл. 2
протокола лабораторной работы.
4. До начала нагружения вывести на «0» шкалу индикатора часового типа.
5. Нагрузить балку силами F. Процесс нагружения должен проходить плавно без толчков и
ударов грузами о подвески. В противном случае результаты испытаний будут не точными, т.к.
не будут соблюдены условия статического нагружения.
31
6. Плавно перемещать подвижный противовес Q1 по рычаг-линейке до тех пор, пока
показание индикатора не возвратится к нулю. Определить положение Zi противовеса Q1 по
шкале рычаг-линейки и записать это значение в табл. 2 протокола.
7. Для получения достоверных результатов испытания, эксперимент повторить не менее
трех раз, для чего установку следует разгрузить, привести подвижный противовес Q1 в
исходное положение, вновь установить индикатор на "0", затем повторить процесс нагружения
и уравновешивания подвижным противовесом. Результаты записать в табл.2 протокола.
8. Разгрузить установку, вернуть подвижный противовес Q1 в исходное положение.
H=60 мм
10.3. Обработка экспериментальных данных
RОП.
ΔZ
МОП.=Q1 ·ΔZ
Q1
Рис. 20
1. Определить среднее арифметическое приращение плеча противовеса Z.
2. Согласно схеме показанной на рис. 20, определить усилие распора, создаваемого
подвижным противовесом Q1, по расчетной зависимости: RОП=Q1*ΔZ/H
3. Полученный результат занести в табл. 3 протокола.
10.4. Определение процента отклонение между теоретическими и
экспериментальными результатами. Выводы
1. Определить процент погрешности из следующего соотношения:
Rоп − Rтеор
⋅ 100% =
ПR =
Rоп
2. Занести полученные результаты в таблицу №3 протокола
3. Сделать вывод о факторах, влияющих на величину погрешности и об адекватности
применяемой математической модели.
32
11. Лабораторно-практическая работа №4.
«Определение перемещений в статически
неопределимом замкнутом контуре»
Цель работы: экспериментально и теоретически определить значение момента защемления
в статически неопределимом замкнутом контуре, сравнить полученные результаты и сделать
выводы.
Теоретический расчет момента защемления
Проведение эксперимента
Обработка экспериментальных данных
Определение процента отклонения значений
теоретического расчета от экспериментальных
результатов
Вывод об адекватности математической
модели метода сил
d=318 мм
2
3
Индикатор
горизонтального
перемещени
Индикатор
горизонтального
перемещения
1
индикатор
вертикального
перемещения
h= 4 мм
Размеры сечения
подвеска с
грузами
Y
X
b=20 мм
F
Рис. 21. Схема лабораторной установки СМ-6М
11.1. Теоретическое определение деформаций замкнутого контура
1. Выбрать основную систему (рекомендуемая основная система представлена на рис. 22 а).
2. Записать для основной системы функции изгибающих моментов от внешней нагрузки F, и
от безразмерных единичных силовых факторов, построить соответствующие эпюры
(рекомендуемые расчетные схемы для построения «грузовой» и «единичных» эпюр см. на рис.
22 б), г)).
33
3. Вычислить, используя метод Мора, «единичные» – δ11,…,δ33 и «грузовые» – δ1F, δ2F, δ3F
коэффициенты для системы уравнений метода сил.
4. Решить систему уравнений метода сил, определить неизвестные связи в замкнутом
контуре Х1, Х1, Х2.
5. Построить «суммарную» эпюру для эквивалентной системы («эквивалентная» система,
соответствующая предложенной «основной» системе показана на рис. 22 в).
6. Провести деформационную проверку (процент погрешности вычислений не более 3%).
а)
б)
в)
X3
F/2
F/2
1
1
X2
X1
F
г)
1
1
m=1
m=1
Рис. 22. Расчетная схема статически неопределимого замкнутого контура
7. Приложить к «основной» системе единичные силы в направлениях искомых деформаций.
Записать функции соответствующих «единичных» моментов. Построить эпюры «единичных»
моментов для определения деформаций.
8. Вычислить, используя метод Мора, вертикальное и горизонтальное перемещение – δГ.., δВ.
Записать эти значения в табл. 3 протокола.
11.2. Порядок проведения эксперимента
1. Для проведения эксперимента из табл. 00 взять исходные данные по своему варианту.
Табл. 3.
Варианты условий нагружения
№ варианта
Величина шага нагрузки F, кг
Число ступеней нагружения n
5.1 6.1
0,5
2
5.2 6.2
0,5
3
5.3 6.3
0,5
4
5.4 6.4
1,0
2
5.5 6.5
1,0
3
5.6 6.6
1,0
4
5.7 6.7
1,5
2
5.8 6.8
1,5
3
5.9 6.9
1,5
4
5.10 6.10
2,0
3
2. До начала нагружения вывести на «0» шкалу индикатора часового типа.
34
3. До начала нагружения вывести на «0» шкалу индикатора часового типа.
4. Нагрузить установку заданной величиной силы F и снять показания индикаторов (1,2,3),
которые замеряют:
1 – вертикальное перемещение;
2 – горизонтальное перемещение левой части контура;
3 – горизонтальное перемещение левой части контура.
5. Процесс нагружения должен проходить плавно без толчков и ударов грузами о подвески.
В противном случае результаты испытаний будут не точными, т.к. не будут соблюдены условия
статического нагружения.
6. Для получения достоверных результатов испытания необходимо опыт повторить не менее
3-х раз и за искомые перемещения принять среднее арифметическое их значений. Такой
порядок проведения эксперимента рекомендуется заменить следующим:
Не разгружая установки после первого нагружения силой F, догрузить ее до 2-х F. Вновь
снять показание индикаторов и вновь произвести догружение на величину силы F и т.д.
Данную процедуру продолжить до величины общей силы равной (n)F . Результаты замеров
записать в таблицу № 2 протокола.
7. Разгрузить установку.
11.3. Обработка экспериментальных данных
1. Согласно предложенной в п.6 схеме нагружения установки с помощью индикаторов
фиксировались величины перемещений Bi, Гi, от возрастающей величины нагрузки Fi . Для
получения нескольких значений каждого типа перемещения от одной и той же величины силы,
заданной по варианту, необходимо определить:
ΔB =
B ⋅ (i + 1) − B ⎫
⎬дляi ≥ 2.
Г ⋅ (i + 1) − Г i ⎭
ΔBi = Bi ⎫
⎬дляi = 1.
ΔГ i = Г i ⎭
Результаты занести в таблицу №2 протокола.
2. Определить среднестатистические значения измеренных величин перемещений:
ΔBср = ∑ ΔBi / n
ΔГ ср = ∑ ΔГ i / n
где n–количество опытов.
Для перехода от показаний индикаторов к единицам измерения вертикального и
горизонтального перемещений умножим соответствующие их средние значения на цену
деления индикатора:
ΔB = c ⋅ ΔBср
ΔГ = c ⋅ ΔГ ср
3. Результаты занести в таблицу №2 протокола
35
11.4. Определение процента отклонение между теоретическими и
экспериментальными результатами. Выводы
1. Определить процент погрешности из следующего соотношения:
Rоп − Rтеор
⋅ 100% =
ПR =
Rоп
2. Занести полученные результаты в таблицу №3 протокола
3. Сделать вывод о факторах, влияющих на величину погрешности и об адекватности
применяемой математической модели.
36
Приложение 1. Основные термины и понятия
1. Статически неопределимой называется система, у которой количество реакций в
опорах и связей между элементами системы превышает число независимых уравнений
статики.
2. Степень статической неопределимости равна числу, так называемых, «лишних
связей», исключение которых превращает исходную систему в статически определимую
геометрически неизменяемую систему.
3. Основной системой называется статически определимая геометрически неизменяемая
система, полученная из исходной системы, в результате исключения «лишних связей».
4. Эквивалентной системой называется основная система, нагруженная внешними
силами и неизвестными усилиями, заменяющими действие исключенных «лишних
связей» и факторов внешнего воздействия.
5. Грузовыми перемещениями называют перемещения точек основной системы,
освобожденных от связей, под действием внешних нагрузок.
6. Единичными перемещениями называют перемещения точек основной системы,
освобожденных от связей, под действием единичных сил, заменяющих действие
исключенных «лишних связей».
7. Физический смысл уравнения метода сил – сумма перемещений раскрепленной точки
эквивалентной системы по направлению конкретной «лишней связи».
8. Деформационной проверкой называют расчет перемещений точек эквивалентной
системы, освобожденных от связей, в направлениях этих связей. Найденные
перемещения должны быть равны нулю.
9. Расчет перемещений для статически неопределимых систем проводят по методу Мора,
прикладывая единичные силы к точкам основной системы.
10. Геометрически неизменяемой называется система, в которой перемещения точек или
элементов возможны только за счет деформации стержней.
37
Приложение 2. Справочные сведения
Интегралы, содержащие тригонометрические функции
ϕ
∫ 0 sin ϕ dϕ
= − cos ϕ
ϕ
∫0 cos ϕ dϕ
ϕ
∫0 sin
ϕ
∫0 cos
ϕ dϕ =
ϕ sin 2ϕ
−
2
4
ϕ dϕ =
ϕ sin 2ϕ
+
2
4
2
2
= sin ϕ
sin 2 ϕ
∫0 sin ϕ ⋅ cos ϕ dϕ = 2
ϕ
в долях
π
1
π
32
рад
0,0982
Значения тригонометрических функций
4
6
2
3
5
π
π
π
π
π
32
32
32
32
32
0,1963
0,2945
0,3927
0,4909
0,5890
sin ϕ
cosϕ
0,0980
0,1951
0,2903
0,3827
0,4714
0,5556
0,6344
0,7071
0,9952
0,9808
0,9569
0,9239
0,8819
0,8315
0,7730
0,7071
38
7
π
32
8
π
32
0,6872
0,7854
Приложение 3. Карточка тестового контроля
q
Эквивалентная
система имеет
вид:
a
a
a
Х3
Х2
Х1
1. Для приведенной эквивалентной системы выбрать соответствующую ей
исходную статически неопределимую систему:
1)
2)
3)
2. Выбрать правильную единичную эпюру М1 :
a
1)
a
2)
M1
M1
3. Для единичной эпюры М3
определить коэффициент δ33 :
а
2а
3)
a
M1
1) δ
а
а
a
a
33
2) δ
33
3) δ
33
8a 3
3 EJ
4a 3
=
EJ
8a 3
= −
3 EJ
=
M3
4. Статически неопределимыми называются системы, у которых число
реактивных усилий:
2) – равно числу
3) – больше числа
1) – меньше числа
статических
статических
статических
уравнений
уравнений
уравнений
равновесия
равновесия
равновесия
5. Физический смысл коэффициентов канонических уравнений δij:
1) – это единичное
перемещение
2) – это единичное
внутреннее
усилие
39
3) – это единичное
напряжение
a
Библиографический список
1. Александров А.В., Потапов В.Д., Державин Б.П. Сопротивление материалов. М.: Высш.
шк., 2000. – 560 с.
2. Сопротивление материалов/Под общ. ред. акад. АН УСССР Г.С. Писаренко. Высш.
школа, 1988. – 790 с.
3. Справочник по сопротивлению материалов/Г.С. Писаренко, А.П. Яковлев, В.В. Матвеев;
Отв. ред. Г.С. Писаренко, 2-е изд. перераб. и доп. Киев: Наукова думка, 1988. – 736 с.
4. Феодосьев В.И. Сопротивление материалов: Учеб. для вузов. 10-е изд., перераб. и доп.
М.: Изд-во МГТУ им. Н.Э. Баумана, 1999. – 527 с.
40