ОБОБЩЕННЫЙ ЗАКОН СТРОЕНИЯ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ Множественно-топологический закон строения механизмов
реклама

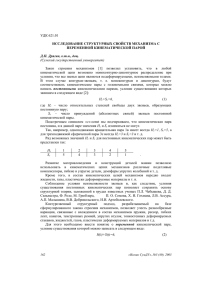
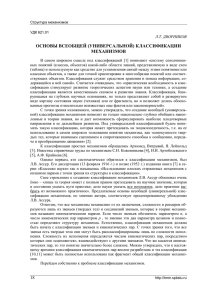
УДК 621.01 ОБОБЩЕННЫЙ ЗАКОН СТРОЕНИЯ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ Д. П. Дрягин, канд. техн. наук, доц. Сумский государственный университет Множественно-топологический закон строения механизмов позволил установить, что механизмы произвольной структуры состоят из контуров нулевого, первого и второго классов [1]. При выводе этого закона предполагалось, что контуры – неизменяемые тела1, содержащие в зависимости от класса контура или места присоединения свободных элементов кинематических пар (контуры нулевого класса), или наряду с местами присоединения одну кинематическую пару (контуры первого класса) или две кинематические пары (контуры второго класса). Перечисленные контуры-звенья закономерны и их удобно назвать соответственно нуль-контурами, моноконтурами и диконтурами. Контур-звено имеет топологическую природу и представляет собой нормированную совокупность неоднородных элементов – звена, одной или двух кинематических пар со свободными элементами, мест присоединения СЭКП. Закон строения механизмов был получен в предположении единственности существования неизменяемой основы – стойки, функцию которой всегда выполняет неподвижная массивная корпусная деталь, которая принята за нуль-контур. Современные машинные агрегаты могут содержать более одной корпусной детали, при этом нередко наблюдается как полное, так и неполное закрепление корпусов. Настоящая статья посвящена получению обобщенного закона строения кинематических цепей, допускающего существование множества нуль-контуров корпусов, а также совокупного множества как постоянных, так и переменных кинематических пар [2]. Компенсирующие муфты могут приниматься за аналоги переменных пар, и в этом случае обобщенный закон строения позволяет исследовать структуру как механизмов, так и машин общего вида, т.е. машинных агрегатов. Кинематическую цепь произвольной структуры в первом приближении можно определить как совокупность двух множеств – звеньев m и пар p . Обобщенный закон строения кинематических цепей с учетом изложенных предпосылок формулируется так: кинематические цепи произвольной структуры состоят или могут быть составлены из трех видов множеств: нуль-контуров n0, моноконтуров nI и диконтуров nII. 1 Неизменяемые тела в составе кинематических цепей принято называть звеньями. Топологические добавки к звеньям в виде некоторых структурных элементов и компонент превращают их в контурызвенья. К таким добавкам относятся места присоединения свободных элементов кинематических пар (СЭКП), а также кинематические пары со свободными геометрическими элементами в виде точек, линий или поверхностей. «Вісник СумДУ», №13(72), 2004 107 На рис.1 условно изображены контуры-звенья кинематических цепей, необходимые и достаточные для того, чтобы выполнять структурный анализ и синтез кинематических цепей. Контрастными точками на рис.1а,б показаны места присоединения СЭКП, а кружками небольшого а диаметра (рис. 1б,в) – в постоянные и переменные б кинематические пары, содержащие свободные элементы. 0 II I а) б) в) Рисунок 1 - Условные изображения контуров-звеньев:0 – нуль-контур; I – моноконтур; II – диконтур ДОКАЗАТЕЛЬСТВО ОБОБЩЕННОГО ЗАКОНА СТРОЕНИЯ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ Пусть имеем множество звеньев кинематической цепи m и совокупное множество кинематических пар p pc p , где pc - множество постоянных пар, а p - множество переменных пар. Допустим, что множество нуль-контуров в этой цепи представлено в виде числового ряда (1) n0 0,1, 2, 3, Докажем, что разностное множество (m-n0) всегда делится на множества моноконтуров nI и диконтуров nII при условии равенства нулю ненормированных остатков2: m n0 nI nI I . (2) По определению моноконтура и диконтура имеем [1]: pI n I , , pI I 2n I I (3) где p и p - соответственно множества пар в составе моноконтуров и диконтуров. Для всей кинематической цепи, с учетом (2) и (3), запишем: p p p, . m n0 n n (4) Из системы уравнений (4), с учетом (3), получим выражение для определения множества диконтуров (степени диконтурности) кинематической цепи 2 Под ненормированными остатками будем понимать, например, звено без мест присоединения свободных элементов кинематических пар и без кинематических пар, а также кинематическую пару как совокупность двух геометрических элементов. «Вісник СумДУ», №13(72), 2004 108 (5) n p (m n0 ). Из второго уравнения системы (4), с учетом (5), определится степень моноконтурности цепи n 2 m n0 p. (6) Итак, получили замкнутое аналитическое решение, подтверждающее существование обобщенного закона строения кинематических цепей. Обозначим дополнительно n m n0 nI nI I . (7) С учетом (7) и (1) запишем обобщенный закон строения кинематических цепей так: n0 m n 0,1, 2, 3,..., n I 2n p, . n I I p n (8) Будем называть совокупность формул (8) 2-м законом контурозвенности, который включает в себя как частный случай 1-й закон контурозвенности [1]. Полученное аналитическое решение (8) позволяет разделить все кинематические цепи на нормальные, для них nI nI I 0 или nI 0, nI I 0 , и анормальные, для которых nI 0, nI I 0 . Замкнутые и незамкнутые цепи механизмов и статически определимых форм относятся к нормальным кинематическим цепям. Примерами анормальных цепей могут служить решетка и многоопорный вал (рис.2), а также сокращенные цепи подшипников качения и многосателлитных зубчатых механизмов. б Вал многоопорный а Решетка n0 1. m n0 n 1. При p 3 n 0 n0 1. . m n0 n 7 и p 15 n 1, n 8. При Рисунок 2 - Анормальные кинематические цепи «Вісник СумДУ», №13(72), 2004 109 ВЫВОДЫ 1 Доказано существование обобщенного закона строения кинематических цепей. 2 Определены условия существования нормальных и анормальных кинематических цепей. SUMMARY In work is received structured closed analytical decision, named by author generalizes a law of the construction of kinematics chains. The received law allows to take into account at study of the chains factors to their spottiness, conditioned no nepotism, autodikontur and presence variable kinematics pair. СПИСОК ЛИТЕРАТУРЫ 1. 2. Дрягин Д. П. Закон строения механизмов // Вісник Сумського державного університету. - 1999. №2(13). – С.79-80. Дрягин Д. П. Исследование структурных свойств механизма с переменной кинематической парой // Вісник Сумського державного університету. - 2003. - №3(49). – С.183-187. Поступила в редакцию 29 октября 2004г «Вісник СумДУ», №13(72), 2004 110 «Вісник СумДУ», №13(72), 2004 111