УДК 621.01
реклама

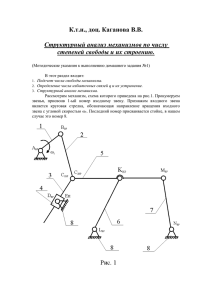
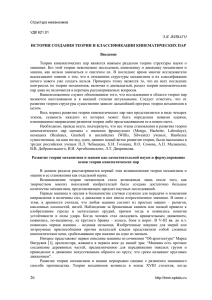
УДК 621.01 ИССЛЕДОВАНИЕ СТРУКТУРНЫХ СВОЙСТВ МЕХАНИЗМА С ПЕРЕМЕННОЙ КИНЕМАТИЧЕСКОЙ ПАРОЙ Д.П. Дрягин, к.т.н., доц. (Сумский государственный университет) Закон строения механизмов [1] позволил установить, что в любой кинематической цепи возможно моноконтурно-диконтурное распределение при условии, что все звенья цепи являются недеформируемыми, неизменяемыми телами. В этом случае контурам-звеньям, т. е. моноконтурам и диконтурам, будут соответствовать кинематические пары с голономными связями, которые можно назвать постоянными кинематическими парами, условие существования которых запишем в следующем виде [2]: Hc+Sc=6, (1) где Hc – число относительных степеней свободы двух звеньев, образующих постоянную пару; Sc – число принуждений (абсолютных связей) звеньев постоянной кинематической пары. Подстрочным символом «с»-const мы подчеркиваем, что кинематическая пара постоянна, и в данной паре значения Hc и Sc изменяться не могут. Так, например, одноподвижная вращательная пара 1в имеет всегда Hc=1, Sc=5, а для трехподвижной сферической пары 3с всегда Hc=3 и Sc=3 и т. д. Ряд возможных значений Hc и Sc для постоянных кинематических пар может быть представлен так: Hc Sc 1 5 2 4 3 3 4 2 5 1 . Развитие материаловедения и конструкций деталей машин позволило использовать в кинематических цепях механизмов различные податливые компенсаторы, гибкие и упругие детали, демпферы упругих колебаний и т. д. Кроме того, в состав кинематических цепей механизмов нередко входят жидкости, газы, пластически деформируемые материалы и т. п. Соблюдение условия неизменяемости звеньев и, как следствие, условия существования постоянных кинематических пар позволяет сохранить основу структурной теории, заложенной в трудах известных ученых П.Л. Чебышева, Д. Д. Сильвестра, Ф. Рело, М. Грюблера, П. О. Сомова, Х. И. Гохмана, Л.В. Ассура, А.П. Малышева, В.В. Добровольского, И.И. Артоболевского. Контурозвенный структурный подход, разрабатываемый на базе сформулированного закона строения механизмов, позволяет учесть разнообразные вариации, связанные с вхождением в состав механизмов пружин, рессор, гибких лент, канатов, текстропных ремней, упругих втулок, тонкостенных деформируемых стаканов, жидкостей, газов, пластически деформируемых материалов и т.д. Для этого необходимо ввести понятие о переменной кинематической паре, условие существования которой можно записать в следующем виде: H(t)+S(t)=6, 162 (2) «Вісник СумДУ», №3 (49), 2003 где H(t)=Hv- переменное значение числа относительных свобод двух звеньев, образующих переменную кинематическую пару; S(t)=Sv – переменное значение числа условий связи (принуждений) двух звеньев, образующих переменную кинематическую пару. Ряд возможных значений Hv и Sv для переменных кинематических пар несколько шире, чем для постоянных пар: Hv Sv 0 6 1 5 2 4 3 3 4 2 5 1 6 0 . Особенностью переменной кинематической пары по сравнению с постоянной является то, что для нее значения Hv могут изменяться от 0 до 6 и обратно, а изменяющиеся значения Sv должны в данный момент времени соответствовать текущему значению Hv. Физические условия существования переменной кинематической пары следующие: наличие двух звеньев; связь двух звеньев с помощью промежуточного изменяемого тела; возможность относительного движения рассматриваемых двух звеньев, в пределе способная переходить в неподвижное соединение (Hv=0, Sv=6) . Число видов переменных кинематических пар значительно больше числа видов постоянных пар, и определение значений Hv и Sv для переменных пар может быть предметом отдельного исследования. Определение текущих значений Hv и Sv в данной переменной кинематической паре связано с необходимостью учета физико-механических свойств промежуточного изменяемого тела, входящего в состав переменной кинематической пары. Все изношенные постоянные кинематические пары по существу являются переменными парами, в них в момент раскрытия зазора Hv=6, Sv=0. Рассмотрим пример. На рис. 1,а показана схема механизма подъемника, а на рис. 1,б – контурозвенный состав этого механизма. Звеньями в этом механизме являются стойка 0, барабан 1 и кабина 2. Принимаем, что барабан 1 образует со стойкой 0 постоянную кинематическую пару 1в, кабина 2 и стойка 0 образуют постоянную пару 1п, а т. к. звено 1 и звено 2 связаны промежуточным изменяемым по длине канатом, то между звеном 1 и звеном 2 существует переменная кинематическая пара Hv. Моноконтурно-диконтурное распределение в этой схеме определится так [1]: n 2 n p 2 2 3 1 , І . (3) n p n 3 2 1 ІІ В соответствии с полученным результатом на рис. 1,б изображены: 1 – I – моноконтур с постоянной парой 1в и местом присоединения элемента барабана ЭБ (показано штриховой линией); 2 – II – диконтур с постоянной парой 1п и переменной парой Hv, включающей в свой состав элемент барабана ЭБ, канат и элемент крепления каната к кабине (на рис. 1 не показан). Подстрочным символом «v» мы подчеркиваем переменность кинематической пары (varia). Такое явление наблюдается, например, при замыкании витков пружины. «Вісник СумДУ», №3 (49), 2003 163 Угол покоя Hv=0, SV=6 Угол скольжения Hv=1, SV=5 ЭБ 1в Hv=2, SV=4 1 1-I Hv 0 2 - II Hv=6, SV=0 2 1п б а Рисунок 1 - Схема и контурозвенный состав механизма подъемника Рассмотрим в данной задаче два варианта. Вариант 1 Кабина находится в верхнем положении. В этом случае можно принять Hv=2, Sv=4. Определим число избыточных связей системы по формуле [3]: q=L0+C+Z–6(nI+nII+1)=6+(5+4+5)+1–6(1+1+1)=3. (4) Число общих условий связей равно [4]: So=q/nII=3/1=3. (5) Степень подвижности механизма [4]: W=H–(6-So)nII=(1+2+1)–(6-3)1=1. (6) Вариант 2. Кабина находится в нижнем положении. В этом случае можно считать, что Hv = 6, Sv = 0. Тогда q=L0+C+Z–6(nI+nII+1)=6+(5+0+5)+1–6(1+1+1)=-1. 164 (7) «Вісник СумДУ», №3 (49), 2003 Примечание. Результат q=-1 косвенно подтверждает, что в системе появляется лишняя подвижность. Для подсчета Sо принимаем q=0: So=q/nII=0/1=0. (8) W=H–(6-So)nII=(1+6+1)–(6-0)1=2. (9) Подвижность системы равна Полученный результат W=2 показывает, что в нижнем положении на основное движение кабины может накладываться дополнительное колебательное движение, т. к. вертикальное перемещение клети 2 за счет удлинения каната отнесено к числу свобод в переменной кинематической паре. ВЫВОДЫ Введены понятия: постоянная кинематическая пара и переменная кинематическая пара. Определены условия существования переменных кинематических пар. Рассмотрены контурозвенная структура и функциональные свойства механизма подъемника с переменной кинематической парой. ЗАКЛЮЧЕНИЕ Контурозвенный подход к структурному исследованию и введение понятия «переменная кинематическая пара» позволяют сохранить основы существующей структурной теории, базирующейся на постулатах о неизменяемом звене и кинематической паре по Ф. Рело, а также позволяют выполнять научно обоснованный структурный и функциональный анализы кинематических цепей, в состав которых входят изменяемые тела. SUMMARY Countourlink approach to structural research and introduction of concept ”variable kinematic pair” allow to keep the bases of the existing structural theory basing postulates on a unchangeable part and constant kinematic pair on F. Relo and also allow to carry out scientifically proved structural and functional analyses of kinematic circuits which structure includes changeable bodies. СПИСОК ЛИТЕРАТУРЫ 1. 2. 3. 4. Дрягин Д.П. Закон строения механизмов//Вісник Сумського державного університету.- 1999. - №2(13). - С. 79-80. Артоболевский И.И. Теория механизмов и машин. – М.: Наука, 1988. Дрягин Д.П. Принуждение и свобода кинематических цепей//Известия вузов. Машиностроение. - 2001. - №6. - С. 49-53. Дрягин Д.П. Аналитические основы оптимизации структуры механизмов//Вісник Сумського державного університету. - 2000. - №19. – С. 89-93. Поступила в редколлегию 28 января 2003г. . «Вісник СумДУ», №3 (49), 2003 165