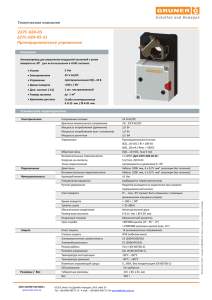
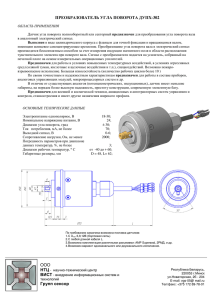
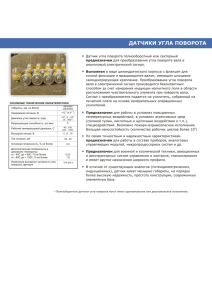
Министерство науки и высшего образования РФ ФГАОУ ВО «Уральский федеральный университет имени первого Президента России Б.Н. Ельцина» Кафедра подъемно-транспортных машин и роботов ОТЧЕТ по практической работе № 1 «Устройство промышленного робота» Студент Еремин В.В. Группа НМТЗ-593302 Преподаватель Великанов В.С. Дата 11.12.2023 Цель работы: изучение классификации, номенклатуры основных показателей промышленных роботов; их состава, назначения каждого узла, а также приобретение навыков работы с промышленным образцом робота. Содержание работы: в ходе выполнения практической работы изучено устройство и принцип работы промышленного сварочного робота Locamp TC06-1500, назначение и размерные параметры его узлов. Промышленный сварочный робот Locamp TC-06-1500 предназначен для выполнения сварочных работ разного типа. Согласно принятой классификации рассматриваемый сварочный робот является целевым неподвижным напольным промышленным легким роботом II поколения с шестью степенями свободы, шарнирно качающейся рукой, управлением от ЭцВМ. Технические характеристики Грузоподъемность Максимальный охват рабочей зоны Степень подвижности Точность позиционирования Масса Диапазон движения Макс. Скорость движения 6 кг 1453 мм 6 осей ±0,05 мм 125 кг Ось А ±180⁰ Ось Б -145⁰..+90⁰ Ось В -75⁰..+180⁰ Ось Г ±170⁰ Ось Д -120⁰..+100⁰ Ось Е ±360⁰ 184⁰/сек 171⁰/сек 370⁰/сек 360⁰/сек 360⁰/сек 1026⁰/сек Рис. 1 Эскиз ПР Рис. 2 Диапазон движений Промышленный робот состоит из неподвижного основания 1, механизма поворота 2 (движение A), механизма поворота 3 (движение Б), руки из трех звеньев 4, 6, 8, механизмов поворота 5 (движение В), 7 (движение Г), 9 (движение Д), кисти 10, механизма поворота 11 (движение Е), рабочего инструмента 12, системы управления 13. Основание 1 жестко удерживает всю конструкцию на месте. Механизм поворота 2 позволяет роботу вращаться вокруг вертикальной оси А. Механизм поворота Б обеспечивает вращение руки вокруг поперечной оси Б. Механизм поворота 5 обеспечивает вращение звена руки 6 вокруг поперечной оси В относительно звена руки 4. Механизм поворота 7 обеспечивает вращение звена руки 8 вокруг продольной оси Г относительно звена 6. Механизм поворота 9 обеспечивает вращение кисти 10 вокруг поперечной оси Д относительно звена руки 8. Механизм поворота 11 обеспечивает вращение рабочего инструмента 12 вокруг продольной оси Е относительно кисти 10. Выводы: благодаря наличию шести степеней свободы и механизмам поворота, изменяющим положение узлов робота в больших пределах и нескольких осях, робот способен доставлять рабочий инструмент по сложной траектории, что позволяет осуществлять рабочие процессы с деталями любых конфигураций и требований.