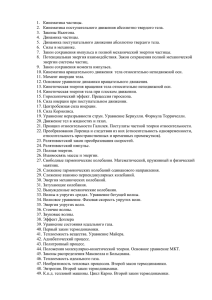
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ПЕРМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» Э.М. Нуруллаев., Н.А. Вдовин ФИЗИКА Часть I МЕХАНИКА. МОЛЕКУЛЯРНАЯ ФИЗИКА И ТЕРМОДИНАМИКА Под общей редакцией доктора технических наук профессора А.И. Цаплина Допущено Научно-методическим советом по физике Министерства образования и науки Российской Федерации в качестве учебного пособия для студентов высших учебных заведений, обучающихся по техническим направлениям подготовки и специальностям Пермь 2007 2 УДК 53(0758) ББК 22.3 Рецензенты: Кафедра общей физики Пермского государственного университета. Зав. кафедрой медицинской и биологической физики Пермской государственной медицинской академии имени академика Е. А. Вагнера профессор, доктор физико-математических наук Г. Е. Кирко. Нуруллаев Э.М., Вдовин Н.А Физика: Учеб. пособие. Часть I. Механика. Молекулярная физика и термодинамика / Под общ. ред. А.И. Цаплина; Перм. гос. техн. ун-т. – Пермь, 2007. – 157 с. Приведен теоретический материал для самостоятельного изучения физики, включающий в себя основные сведения из теории и вопросы для самоконтроля. Предназначено для студентов заочного отделения всех специальностей и преподавателей общей физики. Пермский государственный технический университет, 2007 3 ОГЛАВЛЕНИЕ Введение………………………………………………………………… … 1. Кинематика поступательного и вращательного движения абсолютно твeрдого тела……………………………………………………………….. 1.1. Поступательное движение……………………………………………. 1.2. Вращательное движение ……………………………………………... Вопросы для самоконтроля………………………………………….. 2. Динамика поступательного движения……………………………………. 2.1. Фундаментальные взаимодействия………………………………….. 2.2. Основные характеристики динамики Ньютона……………………... 2.3. Закон инерции. Инерциальные системы отсчета………………….. 2.4. Масса и закон сохранения импульса………………………………… 2.5. Второй закон Ньютона………………………………………………... 2.6. Третий закон Ньютона и закон сохранения импульса……………… 2.7. Преобразования и принцип относительности Галилея 2.8. Основной закон динамики поступательного движения и закон сохранения импульса для системы материальных точек………….. 2.9. Некоторые силы, рассматриваемые в механике…………………….. 2.10. Практическое применение законов Ньютона……………………… 2.11. Движение тела с переменной массой ……………………………… Вопросы для самоконтроля………………………………………….. 3. Динамика вращательного движения твердого тела……………………… 3.1. Основной закон динамики вращательного движения……………… 3.2. Закон сохранения момента импульса………………………………... Вопросы для самоконтроля…………………………………………... 4. Работа. Мощность. Энергия……………………………………………….. 4.1. Работа и мощность при поступательном движении ……………….. 4.2. Работа и мощность при вращательном движении………………….. 4.3. Кинетическая энергия при поступательном движении…………….. 4.4. Кинетическая энергия вращающегося тела…………………………. 4.5. Потенциальная энергия……………………………………………….. 4.6. Силы и потенциальная энергия………………………………………. 4.7. Закон сохранения энергии……………………………………………. 4.8. Применение законов сохранения к соударениям тел………………. Вопросы для самоконтроля…………………………………………... 5. Колебательное движение………………………………………………….. 5.1. Механические колебания……………………………………………... 5.2. Гармонические колебания……………………………………………. 5.2.1. Кинематические характеристики гармонического колебания… 5.2.2. Динамические характеристики гармонического колебания…... 5.3. Маятник………………………………………………………………... 6 8 8 13 19 21 21 22 23 24 25 26 26 28 32 35 36 37 39 39 45 47 48 48 50 51 52 53 55 56 57 60 61 61 62 63 65 66 4 5.3.1. Математический маятник………………………………………... 5.3.2. Физический маятник………...…………………………………… 5.4. Сложение гармонических колебаний……………………………….. 5.4.1. Сложение колебаний одной частоты, направленных вдоль одной прямой……….……….………………………………..…. 5.4.2. Биения……………………………………………………………... 5.4.3. Сложение взаимно перпендикулярных колебаний…………….. 5.5. Затухающие колебания……………………………………………….. 5.6. Вынужденные колебания…………………………………………….. Вопросы для самоконтроля………………………………………….. 6. Упругие волны……………………………………………………………... 6.1. Волновые процессы. Продольные и поперечные волны…………… 6.2. Энергия упругих волн. Вектор Умова……………………………….. 6.3. Уравнение бегущей волны. Фазовая скорость. Волновое уравнение………………………………………………………...............…... 6.4. Принцип суперпозиции. Групповая скорость………………………. 6.5. Интерференция волн………………………………………………….. 6.6. Стоячие волны………………………………………………………… Вопросы для самоконтроля………………………………………….. 7. Молекулярная физика……………………………………………………… 7.1. Предмет молекулярной физики и термодинамики. Статистический и термодинамический методы изучения макроскопических систем 7.2. Основные положения молекулярно-кинетической теории………… 7.3. Газообразное состояние вещества. Идеальный газ…………………. 7.4. Параметры состояния идеального газа……………………………… 7.5. Основное уравнение молекулярно-кинетической теории (уравнение Клаузиуса) и следствия из него………………………………. 7.6. Закон Максвелла распределения молекул идеального газа по скоростям и энергиям………………………………………………….... 7.7. Опыт Штерна……………………………………………………….. 7.8. Идеальный газ в однородном поле тяготения. Барометрическая формула. Распределение Больцмана………………………………..... 7.9. Число столкновений и средняя длина свободного пробега молекул 7.10. Явление переноса в газах……………………………………………. 7.11. Реальные газы………………………………………………………... 7.12. Уравнение Ван-дер-Ваальса………………………………………… 7.13. Внутренняя энергия реального газа. Эффект Джоуля – Томсона... 7.14. Элементы механики жидкостей. Давление в жидкости и газе…… 7.15. Уравнение Бернулли………………………………………………… 7.16. Движение тел в жидкостях и газах…………………………………. Вопросы для самоконтроля……………………………………….. 8. Термодинамика…………………………………………………………….. 8.1. Внутренняя энергия, работа и теплота………………………………. 8.2. Внутренняя энергия идеального газа. Степени свободы системы… 8.3. Работа и теплота………………………………………………………. 66 67 69 70 71 72 76 78 82 85 85 86 88 90 91 92 94 95 95 96 96 97 98 103 106 107 109 110 114 115 119 121 123 125 127 130 130 132 135 5 8.4. Первое начало термодинамики………………………………………. 8.5. Применение первого начала термодинамики к изопроцессам в идеальном газе………………….……………………………………... 8.6. Политропические процессы………………………………………….. 8.7. Тепловые двигатели и холодильные машины. Цикл Карно и его КПД…………………………………………………………………. 8.8. Энтропия, ее статистическое толкование и связь с термодинамической вероятностью……………………………………………..…... 8.9. Второе начало термодинамики………………………………………. 8.10. Применение второго начала термодинамики для определения из менения энтропии в процессах идеального газа……………...….. 8.11. Третье начало термодинамики, или теорема Нернста – Планка…. Вопросы для самоконтроля…………………………………………. Список литературы………….....………………………………………… 138 140 144 147 150 152 153 154 155 157 130 ВВЕДЕНИЕ Физика играет огромную роль в развитии современной техники (машиностроения, электротехники, электроники, теплотехники, ядерной энергетики и др.) и всех отраслей народного хозяйства. Это определяет ее особое значение для высшего образования, поскольку: 1) физика является базой для всех общеинженерных и технических дисциплин сопротивления материалов, теоретической механики, теплотехники, электротехники, различных технологических курсов и др.; 2) пути развития любой отрасли современного производства очень тесно переплетаются с физикой; поэтому инженер любого профиля должен владеть ею, чтобы применять новейшие достижения физики в своем производстве. «Физика» в переводе с греческого «природа». Наряду с другими естественными науками (астрономия, химия, биология и др.) физика изучает свойства окружающего нас мира. Современная физика есть наука о строении материи, о простейших и наиболее общих формах ее движения, о взаимных превращениях форм движения и видов материи. Под материей понимают все то, что существует объективно, т.е. независимо от человеческого сознания, и что познается в чувственном человеческом опыте. Наиболее важным свойством материи является движение. Движение способ существования материи, оно неуничтожимо. Движение в философском смысле всякое изменение материи, всякий происходящий в природе процесс: физический, химический, биологический, геологический, общественный и др. Физика изучает простейшие и в то же время наиболее общие формы движения материи механическую, тепловую, электромагнитную, внутриатомную и т.д., которые содержатся во всех более сложных формах движения. Среди всех форм движения особую роль играет механическое движение. Это объясняется тем, что механическое движение, наиболее простое и наглядное, исторически изучалось первым, все более сложные формы движения включают в себя простое механическое перемещение. Любой вид движения происходит в пространстве и во времени, а механическое движение как раз и определяет пространственно-временные характеристики всех процессов. Простейшую форму движения материи механическое движение изучает механика. Механическим движением называется процесс изменения взаимного расположения тел или их частей в пространстве с течением времени. Механическое движение можно рассматривать с разных точек зрения: 1) с геометрической, т.е. изучать внешнюю сторону различных видов движения, не вникая в причины, которые обусловливают эти движения; 2) с причинно-следственной, т.е. изучать движение с точки зрения тех взаимодействий, которые его обусловливают или изменяют. Разделы механики, изучающие движение с указанных точек зрения, называются соответственно кинематикой и динамикой. Особо рассматриваются условия равновесия (статика). 131 Понятие «механическое движение» неприменимо к одному, отдельному телу. О движении данного тела имеет смысл говорить лишь тогда, когда есть возможность определять его положение относительно другого тела или других тел. Поэтому, приступая к изучению движения какого-либо тела, мы должны сначала условиться, по отношению к какому телу это движение будем рассматривать. Тело или система тел, по отношению к которым определяется положение других тел, называется телом отсчета. Для определения положения какой-либо точки в пространстве и аналитического описания ее движения с выбранным телом отсчета связывают координатную систему. Наиболее удобной и часто употребляемой является прямоугольная (декартова) система координат, в которой положение материальной точки М однозначно определяM z ется координатами x, y, z (рис. В.1). Движение происходит как в пространz стве, так и во времени. Поэтому для описания движения необходим также отсчет вреО мени. Это делается с помощью часов. y x y Тело отсчета, связанная с ним система координат и часы называются x системой отсчета. Рис. В.1 Любое движущееся тело обладает размерами, строением и внутренним состоянием. Однако при изучении механического движения с пространственно-временной точки зрения можно отвлечься от внутреннего строения тела, а зачастую также от его размеров и формы. Так, в случае свободного падения все точки тела движутся одинаково, и для исследования законов падения можно использовать модель материальной точки. Материальная точка (МТ) это тело, формой и размерами которого в условиях данной задачи можно пренебречь. Одно и то же тело в разных задачах может рассматриваться и как материальная точка, и как протяженный объект. Так, движущийся вокруг Земли искусственный спутник можно рассматривать как материальную точку при определении траектории его движения и как протяженное тело определенной формы при расчете затрат энергии на преодоление сопротивления атмосферы при выведении его на орбиту. Движение тел происходит в условиях их взаимодействий, которые могут сопровождаться изменением размеров и формы, т.е. деформацией. Чаще всего деформации настолько незначительны, что при описании движения тела ими можно пренебречь. В этих случаях можно ввести модель «абсолютно твердого тела». Абсолютно твердое тело это тело, деформацией которого в условиях данной задачи можно пренебречь. В таком теле расстояние между двумя любыми точками неизменно во времени. 132 1. КИНЕМАТИКА ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБСОЛЮТНО ТВЕРДОГО ТЕЛА Кинематика раздел механики, в котором исследуются характеристики и закономерности различных типов механического движения тел безотносительно к тем причинам, которые обеспечивают данное движение. Из всех видов движения поступательное и вращательное являются наиболее универсальными, так как любое движение можно разложить на поступательную и вращательную составляющие. 1.1. Поступательное движение Поступательным называется такое движение, при котором любая прямая, жестко связанная с телом, перемещается в пространстве, оставаясь параллельной самой себе. При поступательном движении твердого тела все его точки описывают совершенно одинаковые траектории, имеют одинаковые скорости и одинаковые ускорения. Поэтому при описании поступательного движения твердого тела удобно использование модели материальной точки. Кинематическими характеристиками движения МТ являются путь, перемещение, линейная скорость и линейное ускорение. Траекторией МТ называют линию, описываемую ею в пространстве при движении. В зависимости от формы траектории различают движение прямолинейное и криволинейное (частным случаем криволинейного движения является движение по окружности). Форма траектории зависит от системы отсчета, относительно которой рассматривается движение. Если МТ движется относительно выбранной системы отсчета (см. рис. В.1), то координаты x, y, z с течением времени изменяются: x = f1(t), y = f2(t), z = f3(t). (1.1) Исключив из уравнений (1.1) время, мы получим уравнение траектории движения. Длиной пути s МТ называют сумму длин всех участков траектории, пройденных точкой за рассматриваемый промежуток времени. Длина пути положительная величина и описывается уравнением s = s(t) . (1.2) Пусть МТ в данной системе отсчета движется по некоторой криволинейной траектории АВ (рис.1.1) так, что в момент времени t она занимает положение А, в момент времени t + t - положение В. Длина участка траектории s представляет собой путь, пройденный точкой за 133 промежуток времени от t до t + t. Положение МТ (см. рис.1.1) отz s В носительно системы отсчета можно А задать не только с помощью трех ее r декартовых координат x, y, z, но также r1 с помощью одной векторной величины r2 r радиуса-вектора МТ, проведенноk го в эту точку из начала О системы коj О ординат. Конец вектора r описывает в y пространстве траекторию движения i точки (рис. 1.2). Вектор Δr r2 r1 , x Рис. 1.1 проведенный из начального положения (точка А) в конечное (точка В), называется вектором перемещения МТ за время Δt t2 t1 . Векторные величины в тексте и на рисунках обозначены буквами со стрелкой вверху. Численные значения r и s в случае прямолинейного движения совпадают. В случае же криволинейного движения они совпадают только в пределе, т.е. для бесконечно малого перемещения dr = ds . (1.3) Вектор перемещения r в координатной форме может быть представлен следующим образом: r xi y j z k , (1.4) где i , j , k орты единичных векторов вдоль координатных осей x, y, z (см. рис. 1.1). Абсолютное значение (модуль) вектора перемещения определяется выражением r x 2 y 2 z 2 . (1.5) Для характеристики движения МТ вводят векторную физическую величину скорость, определяющую как быстроту, так и направление движения в данный момент времени. Пусть МТ движется по криволинейной траектории АВ (см. рис. 1.1) так, что в момент времениt она находится в точке А, а в момент времени t+t в точке В. Величину r будем называть приращением радиуса-вектора. Тогда вектором средней скорости vср точки в интервале времени от t до t+t называют отношение приращения Δ r радиуса-вектора точки за этот интервал времени к его величине t: 134 vА z А r vср В vB y О x Рис. 1.2 vср r t . (1.6) Направление вектора средней скорости совпадает с направлением r (рис.1.2). Если в выражении (1.6) перейти к пределу, устремляя t к нулю, то получим выражение для мгновенной скорости МТ в момент времени t прохождения ее через точку А траектории. Мгновенная скорость направлена по касательной к траектории в соответствующей точке v lim r t dr dt , Δt 0 (1.7) т.е. мгновенная скорость равна производной по времени от радиуса-вектора движущейся МТ. С учетом (1.3) модуль мгновенной скорости v v dr dt ds dt , (1.8) или, вводя единичный вектор , касательный к траектории в данной точке, запишем вектор скорости в виде v d s d t . В координатной форме вектор (1.4) и (1.7), следующим образом: (1.9) v можно записать, воспользовавшись v vx i v y j vz k , (1.10) где vx dy dz dx y , v z z . x , v y dt dt dt Модуль мгновенной скорости v v vx2 v2y vz2 . (1.11) 135 В процессе движения вектор скорости может изменяться как по величине, так и по направлению. Для описания быстроты изменения скорости движения вводится понятие ускорения. Пусть за время t движущаяся точка переместилась из положения А в положение В (рис.1.3) и вектор ее скорости v изменился на v . Перенесем вектор vВ из точки В в точку А. Средним ускорением при неравномерном движении в интервале времени от t до t+t vA z A vB О v B vB aср y x Рис. 1.3 a называют вектор ср , равный отношению вектора Δv к промежутку времени t: aср v t . (1.12) Очевидно, что направление вектора aср совпадает по направлению с вектором изменения скорости v (см. рис. 1.3). Мгновенным ускорением точки в момент времени t называют векторную величину a , равную пределу, к которому стремится среднее ускорение этой точки в промежутке времени от t до t+t при неограниченном уменьшении t: a lim v t d v d t , t 0 (1.13) т.е. ускорение в любой момент времени определяется производной от вектора скорости по времени. Направление мгновенного ускорения совпадает с направлением приращения скорости d v за бесконечно малый промежуток времени dt (см. рис. 1.3) . Так как v d r d t , то a d v d t d 2r d t 2 , (1.14) т.е. ускорение равно второй производной от радиуса-вектора по времени. Принимая во внимание (1.10), вектор a можно записать в координатной форме a ax i ay j az k , (1.15) 136 где d vy d 2 y dvx d 2 x d vz d 2 z ax 2 x; a y 2 y; az 2 z . dt dt dt dt dt dt Модуль ускорения a a ax2 a 2y az2 . (1.16) Вектор ускорения описывает изменение величины и направления скорости. Эти изменения можно характеризовать раздельно. Так как скорость является векторной величиной, то она может изменяться как по величине (модулю), так и по направлению. Тогда изменение скорости v можно представить как геометрическую сумму двух векторов: v v vn . (1.17) Вектор v характеризует изменение скорости за время t по величине, а vn по направлению. С учетом выражения (1.17) для мгновенного ускорения запишем: a lim v t lim v t lim vn t . t 0 t 0 t 0 (1.17a) Предел отношения Δv τ /Δt при Δt 0 называется тангенциальным или касательным ускорением a lim v t d v d t d v d t . t 0 (1.18) Предел отношения Δvn Δt при Δt 0 называется нормальным или центростремительным ускорением. Можно показать, что v2 an lim vn t n t 0 R или an v 2 R , (1.19) (1.20) где R радиус кривизны траектории. Таким образом, тангенциальное ускорение a τ вектор, характеризующий изменение скорости по величине, направленный по касательной к a траектории и численно равный dv/dt ; нормальное ускорение n вектор, 137 характеризующий изменение скорости по направлению и направленный по радиусу к центру кривизны траектории. Оно численно равно v2/R. Учитывая (1.13), (1.18) и (1.19), выражение (1.17) можно переписать следующим образом: a a an . (1.21) Так как a и an взаимно перпендикулярны, то численное значение полного ускорения 2 2 dv v 2 2 a a an . dt R 2 (1.22) Поскольку нормальное ускорение всегда направлено к центру кривизны, а тангенциальное по касательной к траектории, то полное ускорение всегда обращено внутрь траектории. Проанализируем некоторые частные случаи движения: а) a 0; an 0 . Так как a dv dt = 0, то v = const, значит, движение равномерное. Если an v 2 R = 0, так как v 0, то R , значит, траектория движения прямая линия. Таким образом, в этом случае движение МТ равномерное и прямолинейное; б) a const , an 0 . Если a dv dt = const, то за равные промежутки времени скорость изменяется на одинаковую величину, значит, движение 2 равнопеременное. При an v R = 0 траектория движения представляет собой прямую линию. Таким образом, в данном случае МТ совершает прямолинейное равнопеременное движение; в) a 0 , an const . Если a dv dt = 0, то движение равномерное. При an v 2 R = const , R = const траектория движения окружность. Значит, в данном случае МТ совершает равномерное движение по окружности; г) a 0 , an f ( t ) . Если аn является функцией времени, то движение криволинейное. Так как a 0 , то движение равномерное. Таким образом, в данном случае МТ совершает равномерное криволинейное движение; д) a f ( t ) , an f ( t ) . Если и тангенциальное, и нормальное составляющие ускорения являются функциями времени, значит, движение неравномерное криволинейное. 1.2. Вращательное движение Вращательным движением твердого тела вокруг неподвижной оси 138 называется движение, при котором все точки тела движутся по окружO ности, центры которых лежат на одной прямой, называемой осью вращения. Ось вращения перпендикулярR2 на плоскостям, в которых лежат эти 2 S2 окружности. Она может проходить сквозь тело или лежать за его пределами. Если ось вращения проходит R1 сквозь тело, то те точки тела, которые лежат на этой оси, во время движения S1 1 тела остаются в покое. При вращательном движении абсолютно твердого тела нельзя пользоваться моделью материальной точки, ибо разные точки тела движутся O по окружностям разного радиуса, т.е. их пути и скорости различны (рис. Рис. 1.4 1.4). В силу этой же причины вращение твердого тела (как целого) не может быть охарактеризовано линей o ным перемещением и линейной ско ростью, как это было сделано в постуd пательном движении. Вместе с тем, нетрудно заметить, что радиусы-век v o торы, соединяющие все точки тверS дого тела с центрами описываемых R ими окружностей, поворачиваются за M один и тот же промежуток времени Рис. 1.5 t на одинаковый угол (см. рис. 1.4). Следовательно, все точки абсолютно твердого тела во вращательном движении проходят одинаковые угловые пути и имеют одинаковые угловую скорость и угловое ускорение. Поэтому в качестве кинематических характеристик вращательного движения тела должны быть выбраны вектор углового перемещения, угловая скорость и угловое ускорение. При малых поворотах тела угол поворота можно рассматривать как векторную величину d , численно равную модулю d, и направленную вдоль оси вращения ОО/ так, чтобы из конца вектора поворот тела был виден против часовой стрелки (правило буравчика) (см. рис. 1.5). Угловой скоростью тела называют вектор ω , численно равный первой производной от угла поворота по времени и направленный вдоль оси вращения по правилу буравчика, т.е. так же, как вектор угла поворота. 139 d dt . (1.23) Угловая скорость характеризует направление и быстроту вращения тела как целого вокруг оси. Если = const, то движение тела называют равномерным вращением вокруг неподвижной оси. Скорость v произвольной точки М тела, вращающегося с угловой скоростью , называют линейной скоростью этой точки. За время dt точка М проходит по дуге окружности радиуса R путь ds = vdt =Rd так, что d vR R . dt (1.24) Из рис. 1.5 видно, что вектор v направлен перпендикулярно и к и к радиусу-вектору R в ту же сторону, что и векторное произведение R . Так как векторы R и взаимно перпендикулярны, то | R | = R = v. Следовательно, v R . (1.25) Так как в случае вращения тела вокруг неподвижной оси за начало координат, из которого проводят радиусы-векторы r , можно выбрать любую точку оси вращения, то выражение (1.25) можно переписать в виде: v r . (1.26) Для характеристики неравномерного вращения тела вводится понятие углового ускорения. Угловым ускорением называют вектор ε , характеризующий быстроту изменения угловой скорости со временем и численно равный первой производной угловой скорости по времени: d dt . (1.27) В случае вращения тела вокруг неподвижной оси изменение вектора обусловлено только изменением его численного значения. При этом вектор ε направлен вдоль оси вращения (рис. 1.6): в ту же сторону, что и , при уско- ренном вращении ( d dt 0 ) и в противоположную сторону ном вращении ( d dt 0 ). при замедлен- Наряду с понятием угловой скорости пользуются понятиями периода и частоты вращения. 140 d dt d <0 dt >0 0 0 ε О О ε а б Периодом вращения Т называют промежуток времени, в течение которого тело совершает один полный оборот, т.е. поворачивается на угол 2 . Частотой вращения n называют число оборотов, совершаемых телом за одну секунду. Связь между , T и n имеет вид 2 T 2n . (1.28) 0 Угол поворота в системе СИ измеряется в радианах (рад), угловая скорость в радианах в секунду (рад/с), угловое ускорение в радианах в секунду в квадрате (рад/с2). Выразим тангенциальное и нормальное ускорение произвольной точки тела, вращающегося вокруг неподвижной оси, через угловую скорость и угловое ускорение тела: Рис. 1.6. dv d dω ωr r rε , dt dt dt (1.29) v2 4π 2 2 an ω r 2 r 4π 2 n 2 r . r T (1.30) a a an O / r O Рис. 1.7 n М Из рис. 1.7 и уравнения (1.29) следует, что вектор a равен векторному произведению вектора углового ускорения на радиус вектор r , соединяющий произвольную точку на оси вращения с точкой М: a r . (1.31) Вектор an нормального ускорения направлен к оси вращения, т. е. в противоположную сторону от r : v2 an n . r (1.32) 141 В табл. 1.1, 1.2 сопоставляются характеристики и законы поступательного и вращательного движения материальной точки. Аналитическое и графическое описания этих двух видов движений аналогичные. Кроме того, в таблицах приводятся формулы, связывающие характеристики поступательного и вращательного движений материальной точки. В табл. 1.3 даны единицы измерения кинематических характеристик поступательного и вращательного движений. Таблица 1.1 Сопоставление характеристик поступательного и вращательного движения материальной точки. поступательное движение характеристики вращательное движение Путь s s = R Угловой путь Скорость v = ds/dt Угловая скорость v =R Тангенциальное = d/dt а = R ускорение а = dv/dt Угловое ускорение аn= R Нормальное ускорение = d/dt аn = v2/R Полное ускорение a a2 an2 a a2 an2 R R 2 2 2 Таблица 1.2 Виды движения (уравнения и графики) Поступательное движение Вращательное движение Равномерное 0 ωt ; ω const ; ε 0 . s0 s0 v t ; v const ; a 0 . S 0 S0 t v 0 t 0 0 t 0 t 142 Окончание табл. 1.2 Поступательное движение Вращательное движение Равнопеременное s s 0 v0 t a t 2 2 ; v v0 a t ; 0 0 t 2 ; 0 ε t ; ε const a const S a 0 S0 0 ε t2 t 0 0 0 t 0 v a 0 v0 0 a 0 t 0 0 0 t 0 Неравномерное a 2 dv d s dt dt 2 ε dω d 2 dt dt 2 Таблица 1.3 Единицы измерения и кинематические характеристики поступательного и вращательного движений Наименова- Обозначение и Название единицы Сокращенное ние харакопределяющее измерения обозначение теристики уравнение единицы измерения Длина l метр (основная ед.) м Время t cекунда(основная ед.) с Скорость v = dl/d t метр в секунду м/с Ускорение a = dv/dt метр в секунду в м/с2 квадрате Плоский радиан рад угол Угловая радиан в секунду рад/с = /t скорость Угловое радиан в секунду в рад/с2 = /t ускорение квадрате Частота секунда в минус с-1 первой степени 143 ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ 1. Какое движение называется механическим? 2. Что понимают под системой отсчета? Для чего нужны системы отсчета? 3. Какое движение называется поступательным? 4. Что называется материальной точкой? 5. Что понимают под траекторией движения? На какие виды делится механическое движение по характеру траектории? 6. Что такое путь? Скалярная или векторная это величина? 7. Что такое вектор перемещения? 8. Что отражает уравнение (задан ли вид траектории): а) s s( t ) ; б) r = =r(t); в) x x( t ), y y( t ), z z( t )? 9. Что такое скорость механического движения? 10. Что называется: а) средней скоростью механического движения; б) мгновенной скоростью механического движения? 11. Как записать мгновенную скорость переменного движения: а) векторным способом; б) координатным способом (величина и направление)? 12. Как направлена скорость криволинейного движения точки? 13. Как по графику скорости найти путь? 14. Что характеризует ускорение поступательного движения? Чем определяются величина и направление ускорения? 15. Какое ускорение называется: а) средним; б) мгновенным? 16. Как направлен вектор ускорения по отношению: а) к траектории движения (в некоторой точке); б) к вектору скорости, в) к равнодействующей силе? 17. Как записать ускорение поступательного движения: а) векторным способом; б) координатным способом? 18. Что характеризует: а) касательная составляющая ускорения, б) нормальная составляющая ускорения? 19. Каковы величина и направление: а) касательной составляющей ускорения; б) нормальной составляющей ускорения? 20. Может ли точка, двигающаяся по кривой, обладать: а) тангенциальным ускорением, равным нулю, б) нормальным ускорением, равным нулю? 21. Может ли полное ускорение точки, двигающейся по кривой, быть направленным в сторону: а) вогнутости траектории; б) выпуклости траектории? 22. Каковы величина и направление полного ускорения тела, брошенного под углом к горизонту? 23. Каков характер движения тела, брошенного: а) в вертикальном направлении; б) в горизонтальном направлении; в) под углом к горизонту? 24. Написать зависимость скорости от времени для тела, брошенного: а) в вертикальном направлении; б) в горизонтальном направлении; в) под углом к горизонту? 25. Какое движение называется вращательным? 144 26. Что называется абсолютно твердым телом? 27. Чем определяется положение вращающегося тела в пространстве? 28. Что называется угловой скоростью? Скалярная или векторная это величина? 29. Как могут быть представлены: а) средняя угловая скорость; б) мгновенная угловая скорость? 30. Какое вращение называется: а) равномерным; б) равнопеременным; в) переменным? 31. Что называется угловым ускорением? 32. Как выражаются среднее и мгновенное угловые ускорения при любом переменном вращении тела? 33. Как могут быть представлены при равнопеременном вращении: угол поворота в функции времени, угловая скорость, угловое ускорение? 34. Как строятся векторы: а) угловой скорости; б) углового ускорения? 35. Как связаны: а) путь, пройденный какой-либо точкой вращающегося тела; б) ее линейная скорость; в) тангенциальное ускорение; г) нормальное ускорение; д) полное ускорение с соответствующими угловыми характеристиками? 36. В каких единицах в СИ измеряются: а) линейный путь; б) угловой путь; в) линейная скорость; г) угловая скорость; д) линейное ускорение; е) угловое ускорение? 37. Какой формулой выражается связь угловой скорости и числа оборотов вала в единицу времени? 38. Какой формулой выражается связь угловой скорости с периодом вращения? 2. ДИНАМИКА ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ Если кинематика дает описание механического движения тел без связи с причинами, его вызвавшими, то динамика изучает зависимость вида и характера движения тел, а также изменений в их движении от взаимодействия между телами. Поэтому динамика – основной раздел механики. Динамика Ньютона базируется на трех законах, сформулированных им в «Математических началах натуральной философии» (1687 г.). Законы Ньютона (как и все другие физические законы) возникли в результате обобщения огромного количества опытных фактов. До конца XIX века считалось, что ньютоновская механика способна объяснить любое механическое явление. С развитием физики обнаружились новые факты, которые не укладывались в рамки классической механики. Эти факты были объяснены новыми теориями – теорией относительности и квантовой механикой. При этом новые теории не перечеркнули классическую механику, а лишь показали ее ограниченность: а) механика Ньютона является механикой макроскопических тел (тел, размеры и массы которых много больше размеров и масс атомов); 145 б) эти тела должны двигаться со скоростями много меньшими скорости распространения света в вакууме; в) законы Ньютона справедливы только в инерциальных системах отсчета. 2.1. Фундаментальные взаимодействия В современной физике выделяют четыре вида фундаментальных, т.е. базовых, не сводящихся к каким-либо другим, взаимодействий: – сильное ядерное, обеспечивающее связь частиц в атомном ядре; – слабое ядерное, ответственное за ряд процессов распада элементарных частиц; – электромагнитное, обеспечивающее стабильность атомов и молекул; – гравитационное, проявляющееся, например, как взаимодействие небесных тел и определяющее структуру Вселенной. Сильное ядерное взаимодействие – самое интенсивное, но короткодействующее: оно сказывается лишь на масштабах атомного ядра (порядка 10-15 м). Слабое ядерное взаимодействие – малоинтенсивное (порядка 10-13 от сильного ядерного) и также короткодействующее. Можно сказать, что оба ядерных взаимодействия определяют структуру микромира, тех кирпичиков, из которых «собран» наш привычный мир, макромир. Структура же макромира определяется двумя другими фундаментальными взаимодействиями. Все эффекты, встречающиеся в механике, имеют гравитационную или электромагнитную природу. Электромагнитное взаимодействие является весьма интенсивным (порядка 10-2 от сильного ядерного) и одновременно – дальнодействующим. Оно могло бы доминировать при галактических масштабах, но редко проявляет себя явным образом в макромире, поскольку встречающиеся в нем объекты, как правило, электрически нейтральны (имеют нулевой суммарный заряд). По этой причине при больших масштабах размеров практически единолично властвует гравитационное взаимодействие. Оно малоинтенсивное (порядка 10-38 от сильного ядерного), но дальнодействующее. Как и электромагнитное, гравитационное взаимодействие убывает обратно пропорционально квадрату расстояния между взаимодействующими телами (такой характер зависимости связан с трехмерностью макромира). 2.2. Основные характеристики динамики Ньютона К динамическим характеристикам поступательного движения относятся масса m, импульс р и сила F. В этом подразделе дается лишь общее представление об этих величинах, подробнее они обсуждаются в подразделах 2.42.5. Воздействие на данное тело со стороны других тел вызывает изменение его скорости, то есть сообщает ему ускорение. Опыт показывает, что 146 одинаковое воздействие придает разным телам (частицам) разные по величине ускорения. Всякое тело, в меру некоторого своего свойства, противится попыткам изменить его движение. Это свойство тела называется инертностью, а соответствующее физическое явление – явлением инерции. В качестве количественной характеристики инертности используется скалярная величина, называемая массой тела (частицы). Говорят, что масса является мерой инертности вещества. Способ определения массы рассматривается в подразделе 2.4. Замечание. Точнее, обсуждаемое свойство называют инертной массой и отличают его от гравитационной массы, ответственной за интенсивность гравитационного взаимодействия тел. Однако согласно подтвержденному экспериментально закону эквивалентности инертной и гравитационной масс эти две характеристики равны друг другу. В ньютоновской механике масса тела считается постоянной величиной, не зависящей от его скорости. Масса является аддитивной («складывающейся») величиной: масса замкнутой системы, cостоящей из n количества тел (частиц), равна алгебраической сумме составляющих данную систему тел (частиц). Импульсом тела называется векторная физическая величина, определяемая произведением массы тела на вектор линейной скорости, с которой оно движется: p mv . (2.1) Импульс является мерой поступательного движения, т.е. характеризует его количество. Из опыта известно, что тело в результате воздействия на него других тел может изменить состояние своего механического движения, а также форму и размеры, т.е. деформироваться. Для описания такого механического воздействия тел друг на друга вводят понятие силы. Силой, действующей на тело (или приложенной к телу), называют физическую величину, являющуюся мерой механического действия на это тело со стороны какого-либо другого тела. Таким образом, движение тела под действием других тел можно рассматривать как движение под действием приложенных к нему сил. В рамках классической механики приходится иметь дело с силами гравитационной природы, а также с упругими силами и силами трения. Два последних вида сил определяются взаимодействиями между молекулами вещества, имеющими электромагнитное происхождение. Следовательно, упругие силы и силы трения являются по своей природе электромагнитными. Впрочем, в рамках механической задачи о связи между действующей силой и характером движения тела мы отвлекаемся от происхождения силы, ее природы, механизма передачи взаимодействия. 147 Сила – величина векторная. В отличие от других векторов она характеризуется тремя признаками: 1) абсолютной величиной (модулем); 2) направлением; 3) точкой приложения. Если на тело одновременно действуют n сил F1, F2, …Fn, приложенных к одной и той же точке тела, то каждая из них действует так, как если бы другие силы отсутствовали. Это утверждение называют принципом суперпозиции (или принципом независимости действующих на тело сил). В этом случае их можно заменить одной эквивалентной силой F, равной их векторной (геометрической) сумме F Fi , (2.2) F и приложенной в той же точке тела. Силу называют результирующей или равнодействующей. 2.3. Закон инерции. Инерциальные системы отсчета В качестве первого закона движения Ньютон принял закон инерции, открытый еще Г. Галилеем (часто его называют также первым законом Ньютона). Он формулируется следующим образом: всякое тело находится в состоянии покоя или равномерного прямолинейного движения, пока воздействие со стороны других тел не заставит его изменить это состояние. Тело, не подверженное внешним воздействиям (в действительности можно говорить лишь о компенсации этих воздействий), называется свободным, а его движение – свободным движением или движением по инерции. Первый закон Ньютона выполняется не во всякой системе отсчета, так как характер движения зависит от выбора системы отсчета. Рассмотрим две системы отсчета, движущиеся друг относительно друга с некоторым ускорением. Если относительно одной из них тело покоится, то относительно другой оно, очевидно, будет двигаться с ускорением. Следовательно, первый закон Ньютона не может выполняться одновременно в обеих системах. Классическая механика постулирует, что существует система отсчета, в которой все свободные тела движутся равномерно и прямолинейно. Такая система отсчета называется инерциальной. Ниже (см. подраздел 2.7) будет показано, что инерциальных систем отсчета существует бесконечное множество. Любая система отсчета, движущаяся относительно некоторой инерциальной системы прямолинейно и равномерно (т.е. с постоянной скоростью), также будет инерциальной. Система отсчета, связанная с Землей, не является строго инерциальной, главным образом из-за суточного вращения Земли. Однако вращение Земли происходит медленно и в большинстве практических задач обусловленные им эффекты пренебрежимо малы, так что приближенно эту систему отсчета можно считать инерциальной. 148 2.4. Масса и закон сохранения импульса Для количественного определения массы введем понятие изолированной, или замкнутой, физической системы. Так называют совокупность тел, влияние на которые других, внешних тел пренебрежимо мало. Тела замкнутой системы могут взаимодействовать только между собой. Рассмотрим замкнутую физическую систему, состоящую из двух материальных точек (рис. 2.1). В v1 результате взаимодействия точек их скорости меняются. 1 2 v1 и v 2 – скорости этих точек в Пусть 1 v2 некоторый момент времени, а v1 и v2 – приращения этих скоростей за некоторое время Δt. Опыт показывает, что при любом значении Δt Рис. 2.1 векторы v1 и v2 противонаправлены, а отношение их модулей – постоянная для данной пары точек величина. Поэтому можно записать m1v1 m2v2 , (2.3) где величины m1 и m2 постоянны и имеют одинаковые знаки. Они не зависят от вида взаимодействия и характеризуют только инертные свойства данных точек. Эти величины и называют инертными массами материальных точек. Придадим соотношению (2.3) другую форму. Пусть v1 и v 2 – скорости тел до взаимодействия, а v1 и v2 – после взаимодействия. Тогда v1 v1' v1 , а v2 v2' v2 , при подстановке их в (2.3) получаем: m1( v1' v1 ) m2 ( v2 v2 ) или m1v1' m1v1 m2v2 m2v2 . После очевидных преобразований получим m1v1 m2v2 m1v1 m2v2 (2.4) Это соотношение называется законом сохранения импульса для пары материальных точек: суммарный импульс замкнутой системы двух материальных точек сохраняется, т.е. d (2.4а) pk const или dt pk 0 . k k В дальнейшем (подраздел 2.8) этот закон будет обобщен на случай системы, состоящей из произвольного числа частиц. 149 2.5. Второй закон Ньютона Итак, импульс замкнутой физической системы сохраняется. Причина изменения импульса тела (и отклонения от режима равномерного прямолинейного движения) внешнее воздействие, мерой которого является сила. Основным законом динамики поступательного движения является второй закон Ньютона. В самой общей формулировке он читается так: скорость изменения импульса тела равна действующей на него силе. dp dt F . (2.5) Если масса тела в процессе движения не меняется, то можно записать mdv dt dmv dt dp dt , так что получаем ma F . (2.5а) В уравнениях (2.5) и (2.5а) под F следует понимать равнодействующую всех приложенных к телу сил. Перепишем уравнение (2.5) в следующем виде: dmv Fdt . (2.5б) Величина Fdt , численно равная произведению силы на время ее действия и направленная по направлению силы, называется импульсом силы. Заметим, что уравнение (2.5) является, по сути, количественным определением понятия силы: если физическая система не является замкнутой, то ее импульс характеризует меру действующей силы (сравните с уравнением (2.4а) и законом сохранения импульса). Иначе действующая сила есть мера незамкнутости системы. 150 2.6. Третий закон Ньютона и закон сохранения импульса 1 F21 F12 Рис. 2.2 2 Опыт показывает, что воздействие тел друг на друга всегда является взаимным, парным и силы всегда возникают парами. Если тело 1 действует на тело 2 с силой F12 , то, в свою очередь, тело 2 действует на тело 1 с силой F21 , причем силы взаимодействия равны по величине и противоположны по направлению (рис. 2.2). В этом заключается суть третьего закона Ньютона: всякому действию есть равное и противоположное противодействие; иначе, силы, с которыми взаимодействуют тела, равны по величине и противоположны по направлению: F12 F21 . (2.6) Этот закон является следствием закона сохранения импульса для пары тел. В самом деле, если от выражающего этот закон уравнения p1 p2 const взять производную по времени, получим dp1 dp2 0, dt dt что с учетом (2.5а) дает уравнение (2.6). 2.7. Преобразования и принцип относительности Галилея Уравнение ma F , выражающее второй закон Ньютона, показывает, что этот закон не может быть справедлив в любой системе отсчета. Действительно, ускорение тела различно в системах отсчета, движущихся друг относительно друга с ускорением. В то же время действующая на тело сила определяется только взаимным расположением и скоростями тел физической системы, а значит, от выбора системы отсчета не зависят. Второй закон Ньютона выполняется в инерциальных системах отсчета. Их множественность и равноправие при описании движения тел, а вследствие этого эквивалентность состояния покоя и прямолинейного равномерного движения доказываются так называемыми преобразованиями Галилея, связывающими значения характеристик тела в различных системах отсчета. При описании движения тел в ряде случаев бывает удобно использовать несколько различных систем отсчета. Обычно одну из них, условно неподвижную, называют лабораторной системой отсчета (ЛСО), другую – движущейся (ДСО). 151 Пусть ЛСО является инерциальной. Докажем, что если ДСО не имеет относительно нее ускорения, то она также инерциальная. Положение тела в ЛСО зададим радиусом-вектором r , в ДСО – радиусом-вектором r (рис. 2.3). Положение начала отсчета ДСО – точки О' – описывается в R ЛСО вектором . Из геометрических соображений очевидно, что y y R V r r x О x О A v = const z z Рис. 2.3 r R r. В классической механике постулируется, что время во всех системах отсчета течет одинаково: t = t'. Если ДСО движется равномерно вдоль оси х ЛСО со скоростью V , то V Rt , так что r r' R r' Vt . (2.7) В координатной форме это выражение можно записать так: x x' Vt , y y , z z , t t . (2.7а) Эти соотношения и называются преобразованиями Галилея для координат. Возьмем от уравнения (2.7) производную по времени: dr dr ' V , dt dt т.е. v v' V . (2.8) Это уравнение связывает скорости тела в ЛСО и ДСО и носит название классического закона сложения скоростей. Возьмем еще раз производную по времени: 152 dv dv' dV ; dt dt dt что дает dV 0, dt a a' . Таким образом, ускорение тела в рассматриваемых системах отсчета одинаково, а потому система отсчета, движущаяся равномерно и прямолинейно относительно инерциальной системы отсчета, также является инерциальной. Поскольку масса тела считается в классической механике одинаковой во всех системах отсчета, то это означает, что закон движения (второй закон Ньютона) во всех инерциальных системах отсчета имеет одинаковый вид. В результате Галилей сформулировал принцип относительности: во всех инерциальных системах отсчета все механические процессы описываются одинаковыми законами и происходят одинаково. Иначе говоря, уравнения механики Ньютона, описывающие движение физических тел инвариантны относительно преобразований Галилея. А. Эйнштейн обобщил этот принцип: во всех инерциальных системах отсчета все физические процессы описываются одинаковыми законами и происходят одинаково. 2.8. Основной закон динамики поступательного движения и закон сохранения импульса для системы материальных точек f13 f 31 3 f12 1 F1 f 32 f 3N f 21 f1N 2 f 2N f 23 F3 F2 f N1 f N3 fN2 N FN 1.Рассмотрим физическую систему, состоящую из N материальных точек (рис. 2.4). Пусть помимо внутренних сил f ik , на i-ю частицу действуют внешние силы, результирующая которых F равна i . Запишем уравнения движения для каждой из частиц: Рис. 2.4 N dp1 dt f12 f13 ... f1k ... f1N F1 f1k F1 ; k 2 153 dp2 dt f 21 f 23 ... f 2 k ... f 2 N F2 N k 1 k 2 f1k F2 ; ……………………………………………………………… dpi dt f i1 f i 2 ... f ik ... f iN Fi N k 1 k i f ik Fi ; ……………………………………………………………… N 1 dpN dt f N 1 f N 2 ... f Nk ... f N ,N 1 FN f Nk FN . k 1 Сложим эти N уравнений. Вследствие того, что f12 f 21 0 (согласно третьему закону Ньютона) и т.д., справа останутся только внешние силы. Таким образом, мы приходим к соотношению N d dt p1 p2 ... p N F1 F2 ... FN Fi . i 1 (2.9) Сумму импульсов частиц, стоящую под знаком производной в левой части, назовем импульсом системы. Обозначив его p , получим N N p pi mi vi . i 1 i 1 (2.10) Из (2.10) следует, что импульс является аддитивной величиной. Запишем соотношение (2.9) в виде N dp dt Fi . i 1 (2.11) Это уравнение выражает основной закон поступательного движения для системы материальных точек: скорость изменения импульса физической системы равна суммарной внешней силе. 2. Из уравнения (2.11) следует, что в отсутствии внешних сил dp dt 0 , (2.12) т.е. суммарный импульс замкнутой системы тел остается постоянным (закон сохранения импульса для системы материальных точек). Иначе говоря, импульс системы тел может быть изменен только за счет действия внешних сил. 154 Отметим, что импульс остается постоянным и для незамкнутой системы при условии, что внешние силы в сумме дают нуль. В случае, когда сумма внешних сил не равна нулю, но проекция этой суммы на некоторое направление равна нулю, сохраняется составляющая импульса в этом направлении. Вообще, в механике рассматривается три закона сохранения: импульса, момента импульса и энергии. Эти законы отражают фундаментальные свойства пространства-времени. Закон сохранения импульса связан с однородностью пространства (равноправием различных его точек): физические процессы в различных точках пространства протекают одинаково. Закон сохранения момента импульса (рассматривается в разделе 3) связан с изотропностью пространства (равноправием различных направлений). Закон сохранения энергии (рассматривается в разделе 4) связан с однородностью времени (равноправием различных моментов времени). Важнейшая роль законов сохранения как инструмента решения физических задач обусловлена рядом причин: а) законы сохранения не зависят ни от траекторий частиц, ни от характера действующих сил. Поэтому они позволяют получить ряд общих и существенных заключений о свойствах различных механических процессов, не вникая в их детальное рассмотрение с помощью уравнений движения. Если, например, выясняется, что такой-то процесс противоречит законам сохранения, то можно утверждать: этот процесс невозможен, и бессмысленно пытаться его осуществить; б) тот факт, что законы сохранения не зависят от характера действующих сил, позволяет использовать их даже тогда, когда силы вообще не известны. В этих случаях законы сохранения являются единственным и незаменимым инструментом исследования. Так, например, обстоит дело в физике элементарных частиц; в) даже в тех случаях, когда силы в точности известны, законы сохранения могут оказать существенную помощь при решении многих задач о движение частиц. Хотя все эти задачи могут быть решены с помощью уравнений движения, привлечение законов сохранения очень часто позволяет получить решение наиболее простым и изящным путем, избавляя нас от громоздких и утомительных расчетов. Поэтому при решении новых задач обычно принято придерживаться следующего порядка: прежде всего один за другим применяют соответствующие законы сохранения и, только убедившись, что этого недостаточно, переходят затем к решению с помощью уравнения движения. Законы сохранения относятся к числу фундаментальных принципов физики. Роль этих законов особенно возросла после того, как выяснилось, что они далеко выходят за рамки механики и представляют собой универсальные законы природы. 3. Вернемся к уравнению движения системы материальных точек. При поступательном движении удобно пользоваться понятием центра масс 155 физической системы. Преобразуем выражение (2.10) для импульса системы точек ( rk – радиус-вектор, задающий положение k-ой материальной точки): m r k k N N drk d d k P mk vk mk mk rk M ; d t d t d t m k 1 k 1 k k k M mk . k Точку c, положение которой задается уравнением Rc mk rk k mk , (2.13) k будем называть центром масс (или центром инерции) системы. Центр масс имеет смысл точки приложения всех действующих на систему массовых сил. Координаты центра масс определяются следующим образом: 1 mk xk , M k 1 Yc mk yk , M k 1 Zc mk zk . M k Xc m m l l О m x c l m Например, для изображенной на рис. 2.5 системы центр масс имеет координаты: ml l . X c 0 ; Yc 4m 4 y Рис. 2.5 Продифференцировав по времени выражение (2.13), получим формулу для вычисления скорости Vc центра масс: Vc m v kk k m . k k Тогда импульс системы можно определить следующим образом: (2.14) 156 dRc PM MVc . dt (2.15) По аналогии с уравнением движения отдельной частицы f dp dt можно записать уравнение движения центра масс системы материальных точек: 2 dP d M Vc dVc d Rc F M MAc M , dt dt dt dt 2 (2.16) где F – суммарная внешняя сила, действующая на систему материальных точек; P – импульс системы; M – масса системы материальных точек; Vc – скорость движения центра масс системы; масс. Ac dVc dt – ускорение центра 2.9. Некоторые силы, рассматриваемые в механике До сих пор мы говорили о силе вообще, не интересуясь ее происхождением. Теперь перейдем к рассмотрению некоторых конкретных разновидностей сил, широко представленных в природе и технике и играющих важную роль в механических процессах. 1. Сила тяготения – сила взаимного притяжения, действующая между двумя материальными телами (точками); она обусловлена гравитационным взаимодействием между телами. Если размеры тел малы по сравнению с расстоянием между ними (материальные точки) или эти тела имеют сферическую форму и однородны, то сила тяготения между ними m1m2 F= γ 2 (2.17) r (закон всемирного тяготения Ньютона), где m1 и m2 массы тел; r расстояние между телами (в случае шаров – расстояние между их центрами); = 6,6710-11 Нм2/кг2 – гравитационная постоянная. Применяя закон всемирного тяготения к случаю взаимодействия земного шара с телом массой m, расположенным вблизи земной поверхности на высоте h, получим mM З Fγ , (2.17,а) ( RЗ h )2 где RЗ – радиус Земли; МЗ – масса Земли. 157 Сила гравитационного притяжения тела к Земле F = mg , (2.18) где g – ускорение свободного падения. Такая сила называется силой тяжести. Ускорение свободного падения тела g зависит от его высоты над земной поверхностью: MЗ g= γ . (2.19) ( RЗ h )2 2. Упругая сила – сила, возникающая при деформации тела, т.е. при изменении его формы или объема, обусловленном действием внешних сил. Если после прекращения действия внешних сил, вызвавших деформацию, тело полностью восстанавливает свою первоначальную форму и размеры, то оно называется упругим. В таких телах возникают внутренние силы, препятствующие дальнейшему смещению частиц деформируемого тела, в результате чего внешние силы оказываются уравновешенными. Эти внутренние силы называются силами упругости. Для упругих деформаций справедлив закон Гука: упругая сила, возникающая при деформации сжатия или растяжения, пропорциональна величине деформации: Fупр = – kx , (2.20) где x – величина абсолютной деформации, равновесие а k – коэффициент упругости, зависящий x от природы и геометрии тела; знак «–» означает, что направление упругой силы x всегда противоположно направлению растяжение смещения частей тела (рис. 2.6). x Упругие свойства тел проявляются также при деформациях кручения и изгиба. Fупр С упругими силами связаны силы Рис. 2.6 нормальной реакции опоры N (например, для тела, лежащего на столе) и силы внешнего трения. 3. Все тела обладают способностью оказывать давление друг на друга при непосредственном контакте. При этом в соответствии с третьим законом Ньютона одновременно возникают две равные по модулю и противоположные по направлению силы. Часто одно из тел называют опорой (или подвесом). Направленную перпендикулярно касающимся поверхностям силу P, с которой другое тело действует на опору (подвес), называют весом тела. Силу N, с которой опора действует на тело (также перпендикулярно касающимся поверхностям), называют силой нормальной реакции опоры. Аналогично говорят о силе реакции подвеса. Причины, вследствие которых возникают силы веса и реакции опоры 158 (подвеса) разнообразны. Чаще всего существенную роль играет сила тяжести. Для тела, лежащего на неподвижной горизонтальной поверхности, вес и сила реакции опоры равны по модулю силе тяжести. Однако вес и сила тяжести далеко не одно и то же. Во-первых, они приложены к разным объектам: сила веса – к опоре, сила тяжести – к самому телу. Во-вторых, они, вообще говоря, не равны друг другу. Так дело обстоит, например, если опора не горизонтальна или движется с ускорением. Сила веса и сила тяжести могут при этом существенно отличаться как по модулю, так и по направлению. Сила тяжести всегда одинакова по величине и направлена вертикально вниз, к центру Земли. А сила веса может быть направлена под углом к вертикали, горизонтально или даже вертикально вверх. Наконец, в состоянии невесомости (при свободном падении или в кабине космического корабля) вес равен нулю, а сила тяжести действует и даже определяет характер движения. 4. Силы трения появляются при перемещении соприкасающихся тел или их частей друг относительно друга. Трение, возникающее при относительном перемещении двух соприкасающихся тел, называется внешним; трение между частями одного и того же сплошного тела (например, жидкости или газа) называется внутренним. Трение между поверхностями двух твердых тел при отсутствии какойлибо прослойки, например смазки между ними, называется сухим. Трение между твердым телом и жидкой или газообразной средой, а также между слоями такой среды называется вязким. Силы трения направлены по касательной к трущимся поверхностям (или слоям), причем так, что они противодействуют относительному смещению этих поверхностей (слоев). В случае сухого трения сила трения возникает не только при скольжении одной поверхности по другой, но и при попытках вызвать такое скольжение. В этом случае она называется силой трения покоя. Законы сухого трения сводятся к следующему: максимальная сила трения покоя, а также сила трения скольжения не зависят от площади соприкосновения трущихся тел и оказываются приблизительно пропорциональными по модулю силе нормального давления Fn, прижимающей трущиеся поверхности друг к другу: Fтр = k Fn , (2.21) (эта формула связывает лишь модули сил, поскольку их векторы неколлинеарны). Безразмерный коэффициент пропорциональности k называется коэффициентом трения (соответственно, покоя или скольжения). Сухое трение обычно обусловлено шероховатостью соприкасающихся поверхностей. Главной причиной трения гладких поверхностей становятся силы сцепления между молекулами трущихся поверхностей. Замечательная особенность силы трения скольжения состоит в том, что она слабо зависит от относительной скорости трущихся тел. Сила вязкого трения, напротив, сильно зависит от относительной 159 скорости трущихся слоев жидкости (газа) или скорости v движения тела. При малых скоростях приближенно выполняется закон Fтр = –α v. (2.22) Здесь α – коэффициент вязкого трения, зависящий от формы тела; знак «–» означает, что направление силы вязкого трения противоположно направлению движения. 2.10. Практическое применение законов Ньютона R Fтр Fn Для того чтобы описать движение тела, нужно, прежде x всего, установить, какие силы действуют на рассматриваемое тело, точнее – действие каких сил mg существенно. Например, для тела, соскальзывающего по наклонной Рис. 2.7 плоскости (рис. 2.7), существенно воздействие со стороны Земли (оно характеризуется силой mg ) и воздействие со стороны плоскости (оно характеризуется силами нормальной реакции опоры Fn и трения Fтр ; векторную сумму этих двух сил часто называют силой реакции опоры R ). Определив действующие на тело силы, записывают в векторной форме уравнение второго закона Ньютона. В нашем примере оно имеет вид ma mg Fn Fтр . Далее нужно перейти от векторного уравнения движения к скалярным уравнениям – его проекциям на оси выбранной системы координат. При этом используются следующие свойства проекций: равные векторы имеют одинаковые проекции; проекция вектора, получающегося умножением какого-то другого вектора на скаляр, равна произведению проекции этого вектора на скаляр; проекция суммы векторов равна сумме проекций складываемых векторов. Обычно для удобства одну из координатных осей направляют вдоль направления движения или направления ускорения. В нашем случае ось абсцисс удобно направить параллельно наклонной плоскости к ее основанию, а ось ординат – перпендикулярно ей вверх. Получим: проекция на ось х : ma = mg sin Fтр 160 проекция на ось y : 0 = – mg cos + Fn Учитывая (2.21), исключим силы трения и реакции опоры и получим: ma = mg sin kmg cos , откуда легко найти ускорение а. 2.11. Движение тела с переменной массой Основной закон динамики поступательного движения (2.5) не предполагает постоянства массы движущегося тела. Масса тела может меняться в процессе движения в результате не только изменения скорости, но и за счет присоединения или отделения частиц (сматывание рулона бумаги или ткани, движение поливальной машины, самолета, ракеты и т.д.). Наиболее ярко этот эффект проявляется в реактивной технике. В этом случае система состоит из тела ракеты и вытекающего из его сопла газообразного продукта сгорания (рис. 2.8). Масса ракеты непрерывно уменьшается по мере U расхода горючего топлива. v Пусть m и v – масса ракеты и ее скорость в момент времени t, а mdm и v+dv – те же величины в момент времени t+dt. Тогда Рис.2.8 согласно второму закону Ньютона: (m–dm)(v+dv) + dm (v+dv + U) – mv = Fdt , где dm – масса выброшенных продуктов сгорания, U – скорость выброса частиц относительно ракеты, F - внешняя сила. Раскрыв в последнем уравнении скобки и поделив на dt, получим m (dv/dt) = F – U (dm/dt). (2.23) Уравнение (2.23) впервые получено И. В. Мещерским (1897 г.), профессором Петербургского университета, и носит его имя. Слагаемое –U (dm/dt) в уравнении (2.23) обусловлено переменностью массы тела, имеет размерность и физический смысл силы и называется реактивной силой: Fp = U (dm/dt) . (2.24) Из формулы (2.24) видно, что реактивная сила, возникающая при отделении или присоединении частиц, зависит: 161 от быстроты изменения массы тела dm/dt (в случае присоединения частиц масса тела увеличивается, в случае отделения частиц масса тела уменьшается); от величины и направления скорости U, с которой частицы покидают тело или присоединяются к нему. Реактивная сила, действующая на тело, совпадает по направлению с направлением U, если частицы присоединяются, и противоположна этой относительной скорости, если частицы отделяются. Из уравнения (2.23) видно, что движение ракеты будет происходить и тогда, когда внешняя сила F =0, за счет только действия реактивной силы. Таким образом, ракета – единственный аппарат, способный приходить в движение и изменять его без опоры (без посредства внешней среды), а реактивный двигатель является единственно возможным двигателем космических снарядов и кораблей. Вопросы для самоконтроля 1. В каких случаях нельзя пользоваться законами Ньютона? 2. Сформулировать первый закон Ньютона. 3. Что такое инерция? 4. Какая система отсчета называется: а) инерциальной; б) неинерциальной? 5. Как формулируется принцип относительности Галилея? 6. Какие динамические характеристики описывают поступательное движение? 7. Дать определение силы. 8. Какие виды сил в механике Вы знаете? 9. Какая сила называется упругой? Чему она равна? Каковы ее свойства? 10. Что такое сила тяготения? Чему она равна? Каковы ее свойства? 11. Какая сила называется силой трения? Чему она равна? Каковы ее свойства? 12. Какую величину называют импульсом силы? 13. Что такое масса? Какими свойствами она обладает? 14. Всегда ли масса постоянна в процессе движения тела? 15. Какая величина называется импульсом тела? 16. Как найти изменение импульса, если тело движется по кривой? 17. Сформулировать второй закон Ньютона в самой общей форме и записать его математически. 18. Сформулировать и записать математически второй закон Ньютона для частного случая движения тела постоянной массы (m = const). 19. В чем заключается принцип суперпозиции для сил? 20. Сформулировать третий закон Ньютона. В чем суть этого закона? 21. Как зависит характер поступательного движения тела от вида действующей силы? Приведите примеры. 22. Какая система тел называется замкнутой (изолированной), незамкнутой? 162 23. Какие силы называются внешними, внутренними? 24. Сформулируйте и запишите математически закон сохранения импульса (количества движения): а) для отдельного тела; б) для системы тел. 25. Напишите уравнение движения тела с переменной массой и поясните физическое содержание входящих в него величин. 26. Что такое «реактивная сила»? От каких величин и как она зависит? 27. Какое движение называется реактивным? 28. От каких величин и как зависит скорость, приобретенная ракетой в процессе движения? 163 3. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 3.1. Основной закон динамики вращательного движения Любое тело или систему тел можно мысленно представить в виде системы материальных точек – достаточно малых частей этих тел. Рассмотрим произвольную механическую систему, состоящую из n материальных точек. Пусть mi – масса i-й точки системы, а ri – радиус-вектор, проведенный в эту точку из начала координат О неподвижной инерциальной системы отсчета. Обозначим через Fik силу, действующую на i-ю точку со стороны k-й Fi внеш материальной точки системы (внутренние силы), а через – равнодействующую всех внешних сил (сил, действующих на рассматриваемую систему извне), приложенных к i-й точке d n внеш ri mi vi ri Fik ri Fi . dt k 1 (3.1) Легко видеть, что знак производной по времени в левой части этого уравнения можно вынести за знак векторного произведения. В самом деле, d dri ri mi vi mi vi ri d mi vi ri d mi vi , dt dt dt dt потому что dri mi vi vi mi vi 0 , dt как векторное произведение двух одинаково направленных векторов. Следовательно, уравнение (3.1) можно переписать в виде внеш d ri mi vi ri Fik ri Fi . dt (3.2) Векторное произведение радиуса-вектора ri материальной точки на ее импульс mi vi называют моментом импульса Li этой материальной точки относительно точки О Li ri mi vi . (3.3) Он направлен перпендикулярно к плоскости, проведенной через векторы ri и mi vi , и образует с ними правую тройку векторов (при наблюдении из 164 конца Li видно, что вращение по кратчайшему расстоянию от ri к mi vi происходит против часовой стрелки, рис. 3.1,а). Векторное произведение радиуса-вектора ri , проведенного О в точку приложения силы, на эту силу называют моментом Mi Li mi vi ri Mi mi О а F силы i относительно точки О: ri Fi mi б Рис. 3.1 M i ri Fi . (3.4) r Векторы i , M i , Fi образуют правую тройку (рис. 3.1, б). Численное значение момента силы Fi Mi = Fi ri sin i = Fi li , (3.5) где i – угол между векторами ri и Fi , а li = ri sin i – длина перпендикуляра, опущенного из точки О на линию действия силы Fi . Величина li называется плечом силы Fi . Если линия действия силы проходит через точку О, то li = 0 и момент силы относительно точки О равен нулю. Из (3.2), (3.3), и (3.4) следует, что скорость изменения момента импульса i-й материальной точки n dL M ik M iвнеш . dt k 1 Сложим почленно все эти уравнения, материальных точек системы: записанные для каждой из n n n n внеш dLi M M . dt ik i i 1 k 1 i 1 внеш (3.6) (3.7) Векторную сумму моментов M i всех внешних сил, приложенных ко всем материальным точкам системы, называют результирующим, или главным моментом M внешних сил относительно точки О: 165 n n внеш M Mi ri Fi внеш . i 1 i 1 (3.8) L Векторную сумму моментов импульсов i всех материальных точек системы называют моментом импульса L системы относительно точки О: n n L Li ri mi vi . i 1 i 1 (3.9) Так как производная от суммы равна сумме производных от всех слагаемых, то dL n d Li . dt i 1 dt (3.10) Наконец, векторная сумма моментов относительно точки О всех внутренних сил Fik взаимодействия между материальными точками системы равна нулю: M ik 0 . n n i 1 k 1 (3.11) Это связано с тем, что по третьему закону Ньютона силы Fik и Fki численно равны, имеют общую линию действия, но направлены M M противоположно. Поэтому их моменты ik и ki относительно точки О численно равны и противоположны по направлению. На основании соотношений (3.8), (3.10) и (3.11) уравнение (3.7) можно записать в следующей форме: dL M. (3.12) dt Таким образом, скорость изменения момента импульса системы относительно неподвижной точки равна результирующему моменту относительно той же точки всех внешних сил, действующих на систему. Соотношение (3.12) справедливо, в частности, для твердого тела, закрепленного в точке О. В этом случае оно выражает основной закон динамики тела, вращающегося вокруг неподвижной точки. Из него следует, что момент импульса L является основной динамической характеристикой тела, вращающегося вокруг неподвижной точки. Пусть теперь твердое тело закреплено в двух неподвижных точках: О и О1 так, что оно может вращаться вокруг неподвижной оси Оz, проходящей 166 через эти точки. В этом случае, составляющие момента M относительно точки О, направленные вдоль осей Ох и Оy, компенсируются соответствующими моментами сил реакции закрепления в точке О1. Поэтому вращение тела вокруг оси 0z происходит под действием составляющей Mz момента внешних сил относительно точки О. Из (3.12) следует, что уравнение движения тела имеет вид d Lz Mz , dt (3.13) где Lz и Mz – составляющие векторов момента импульса тела и результирующего момента внешних сил относительно точки О, направленные вдоль неподвижной оси Оz вращения тела и называемые, соответственно, моментом импульса тела относительно оси Оz и результирующим моментом внешних сил относительно той же оси. Уравнение (3.13) выражает основной закон динамики для тела, вращающегося вокруг неподвижной оси: скорость изменения момента импульса тела относительно неподвижной оси вращения равна результирующему моменту относительно этой оси всех внешних сил, действующих на тело. Из этого закона следует, что основной динамической характеристикой тела, вращающегося вокруг неподвижной оси, является момент импульса тела относительно этой оси. Найдем выражение для момента импульса Lz тела, вращающегося вокруг n n неподвижной оси Оz с угловой скоростью . Так как L Li , то Lz Liz . i 1 i 1 Из рис. 3.2 видно, что радиус-вектор i-й материальной точки ri bi i , где bi – вектор, проведенный из точки О в точку Оi, лежащую на оси вращения Оz и являющуюся центром окружности, по которой движется рассматриваемая i-я точка тела. Поэтому Li ri mi vi bi mi vi i mi vi . b Вектор i mi vi перпендикулярен к вектору z О1 vi Оi bi i mi ri О Рис. 3.2 bi , т.е. его составляющая вдоль оси Оz равна i , и vi i взаимно нулю. Векторы перпендикулярны и лежат в плоскости, перпендикулярной оси вращения тела. Поэтому вектор i mi vi численно равен i mi vi = 2i,mi и направлен вдоль 167 оси вращения тела в ту же сторону, что и вектор . Таким образом, mi и Lz mi ρi2 . Liz = 2i (3.14) Сумма произведений массы каждой материальной точки тела на квадрат ее расстояния до оси называется моментом инерции тела относительно этой оси. Момент инерции относительно оси Оz равен Следовательно, I z mi i2 . (3.15) Lz = Iz . (3.16) Рассмотрим более подробно величину, называемую моментом инерции тела относительно оси вращения. Характер вращения тела вокруг неподвижной оси определяется не только моментом силы M , но находится в зависимости от величины, обуславливающей инертность тела во вращательном движении. Опытным путем установлено, что на величину углового ускорения вращающегося тела оказывает влияние не только его масса, но и характер ее распределения относительно оси вращения. Таким образом, масса m не может служить однозначной характеристикой инертности тела во вращательном движении и поэтому вводится новая скалярная величина момент инерции тела I, которая учитывает оба эти обстоятельства. Момент инерции I скалярная физическая величина, мера инертности тела во вращательном движении, зависящая от массы тела и ее распределения относительно оси вращения. Для материальной точки тела момент инерции численно равен произведению массы этой точки на квадрат ее расстояния до оси вращения I м.т. = m 2i . (3.17) Для суммы n отдельных материальных точек, в соответствии с принципом аддитивности, момент инерции n I miρi2 . i 1 (3.18) Для определения момента инерции абсолютно твердого тела любой формы выделим в нем элемент массы dmi , отстоящий на расстоянии i от оси вращения. Тогда, в силу (3.18) и возможности представления твердого тела в виде совокупности материальных точек массы dmi , момент инерции тела 168 I = ρ i dm . 2 (3.19) Расчет моментов инерции неоднородных тел и тел неправильной формы сложная математическая задача, часто моменты таких тел определяются экспериментально. Моменты инерции IО некоторых однородных тел геометрически правильной формы относительно оси симметрии приводятся в справочной литературе: I) момент инерции сплошного однородного цилиндра (диска) относительно оси цилиндра IО = 1 mR2, 2 (3.20) где R радиус цилиндра; m его масса. 2) момент инерции тонкостенного полого цилиндра (кольца) IО = mR2 ; (3.21) 3) момент инерции однородного шара радиуса R IО = 2 mR2 ; 5 4) момент инерции однородного стержня длиной IО = 1 m l2 . 12 l (3.22) Одно и то же тело имеет различные моменты инерции в зависимости от положения неподвижной оси вращения. Если ось вращения не проходит через центр инерции (не совпадает с осью симметрии), то момент инерции тела определяется по теореме Штейнера: момент инерции I относительно произвольной оси равен сумме момента инерции IО относительно оси, параллельной данной и проходящей через центр инерции тела, и произведения массы тела m на квадрат расстояния d между осями: 169 B d d I = IО + md2 . О (3.23) Пример. Для однородного шара массой m и радиусом R (рис. 3.3) момент инерции относительно оси ОО/, проходящей через центр инерции, IО = R B d О 2 mR2 5 . Момент инерции шара относительно оси BB , касательной к поверхности шара и параллельной оси ОО, согласно (3.23), Рис. 3.3 I = IО + mR2 = 2 7 mR2 +mR2 = mR2. 5 5 Из формулы (3.16) следует, что основное уравнение (3.13) динамики для тела, вращающегося вокруг неподвижной оси Оz, можно представить в такой форме: d ( I z ) M z dt I Mz , или (3.24) где угловое ускорение тела. 3.2. Закон сохранения момента импульса Для замкнутой системы тел момент M внешних сил всегда равен нулю, так как внешние силы вообще не действуют на замкнутую систему. Поэтому из уравнения (3.12) следует, что для такой системы dL M = 0 и L = const . dt (3.25) Этот результат называется законом сохранения момента импульса: момент импульса замкнутой системы тел относительно любой неподвижной точки не изменяется с течением времени. В теоретической физике доказано, что этот закон – следствие изотропности пространства. Изотропность пространства означает, что при повороте в нем замкнутой системы как целого физические свойства замкнутой системы и законы ее движения не изменяются. Из основного закона динамики тела, вращающегося вокруг неподвижной оси Oz (уравнение 3.13), следует закон сохранения момента импульса тела относительно этой оси: если момент внешних сил относительно неподвижной оси вращения тела тождественно равен нулю, то момент 170 импульса тела относительно этой оси не изменится в процессе движения. Если Mz 0, то на основании соотношения (3.16) Iz = const, (3.26) где угловая скорость тела; Iz – его момент инерции относительно оси вращения. Этот закон может быть обобщен на любую незамкнутую систему тел: если результирующий момент всех внешних сил, приложенных к системе, относительно какой-либо неподвижной оси тождественно равен нулю, то момент импульса системы относительно той же оси не изменятся с течением времени. В заключение приводятся таблица аналогий в описании поступательного и вращательного движений (табл. 3.1) и таблица единиц измерения динамических характеристик поступательного и вращательного движений (табл. 3.2). Таблица 3.1 Характеристики и законы поступательного и вращательного движений Поступательное движение по прямой линии s – линейный путь v – линейная скорость a – линейное ускорение m – масса тела F – сила p = mv – импульс тела Fdt – импульс силы Основной закон динамики поступательного движения d mv F при m const dt ma F при m = const Закон сохранения импульса mi vi = const – для системы тел mv = const – для одного тела Вращательное движение относительно неподвижной оси – угловой путь – угловая скорость – угловое ускорение I – момент инерции тела M – момент силы L = I – момент импульса тела Mdt – импульс момента сил Основной закон динамики вращательного движения d ( I) M при I const dt I M при I = const Закон сохранения момента импульса I i i = const – для системы тел I =const – для одного тела 171 Таблица 3.2 Единицы измерения динамических характеристик Обозначение и Сокраще Наименование определяющее Название нное характеристики обознач. уравнение 1 2 3 4 Масса m килограмм кг Сила ньютон Н F m a Импульс килограмм-метр в кгм/с p mv секунду Импульс силы ньютон-секунда Нс Ft Момент инерции I= mr2 килограмм-метр в кгм2 квадрате Момент силы ньютон-метр Нм M i ri Fi Момент импульса килограмм-метр в кгм2/с LI квадрате в секунду Импульс момента силы Ньютон-метр-секунда Нмс Mt Вопросы для самоконтроля 1. Какие динамические характеристики описывают вращательное движение? 2. Почему сила не может служить однозначной характеристикой вращательного движения? 3. Напишите формулу момента силы и поясните входящие в нее величины. 4. Как строится вектор, изображающий момент силы? 5. Что такое «плечо силы»? Как его определить и построить на рисунке? 6. Какая составляющая силы называется вращательной? Почему? 7. Подчиняется ли принципу суперпозиции момент силы? 8. Что такое момент инерции? Скалярная или векторная это величина? 9. Напишите выражение момента инерции: а) для материальной точки; б) для системы материальных точек; в) для абсолютно твердого тела. 10. От каких параметров зависит момент инерции? 11. Через какую точку тела должна проходить ось вращения, чтобы момент инерции относительно этой оси имел наименьшее значение? 12. Сформулируйте теорему Штейнера. 13. Что такое момент импульса? Как направлен вектор момента импульса? 14. Запишите формулу момента импульса: а) для абсолютно твердого тела; б) для материальной точки. 15. Сформулируйте и запишите математически основной закон динамики вращательного движения в самой общей форме. 172 16. Сформулируйте и запишите математически основной закон динамики вращательного движения в частном случае вращения тела с неизменным моментом инерции (I=const). 4. РАБОТА, МОЩНОСТЬ, ЭНЕРГИЯ 4.1. Работа и мощность при поступательном движении Энергия – универсальная мера различных форм движения и взаимодействия. С различными формами движения материи связывают различные формы энергии: механическую, тепловую, электромагнитную, ядерную и др. Изменение механического движения тела вызывается силами, действующими на него со стороны других тел. Чтобы количественно характеризовать процесс обмена энергией между взаимодействующими телами, в механике вводится понятие работа силы. Если тело движется прямолинейно, и на него действует постоянная сила F, которая составляет угол с направлением перемещения, то работа этой силы равна произведению проекции силы Fs на направление перемещения, умноженной на перемещение точки приложения силы: F F v F= const Fs dr 1 2 Рис. 4.1 1 2 s Рис. 4.2 A = Fs cos = Fs s . (4.1) Из формулы (4.1) следует, что при /2 работа силы положительна, в этом случае составляющая FS совпадает по направлению с вектором скорости движения v (рис.4. 1). При /2 работа силы отрицательна. При = /2 (сила направлена перпендикулярно перемещению) работа силы равна нулю. Единица работы – джоуль (Дж). По своему смыслу 1 Дж – работа, совершаемая силой в 1 Н на пути в 1 м (1 Дж = 1 Нм). 173 В общем случае сила может изменяться как по модулю, так и по направлению, и тогда формулой (4.1) пользоваться нельзя. Если, однако, рассмотреть элементарное перемещение dr, то силу F можно считать постоянной, а движение тела – прямолинейным. Элементарной работой силы F называется скалярная величина dA F dr Fcos ds Fs ds , (4.2) где точка – знак скалярного произведения векторов; – угол между векторами dr ; ds dr – элементарный путь; Fs = F cos – проекция вектора F на вектор dr (см. рис. 4.1). F и Работа силы на конечном участке траектории от точки 1 до точки 2 равна при этом алгебраической сумме элементарных работ на отдельных бесконечно малых участках пути. Запись такой суммы через интеграл имеет вид 2 2 1 1 A F ds cos Fs ds . (4.3) Для вычисления этого интеграла надо знать зависимость силы Fs от пути s вдоль траектории 1-2. Эту зависимость можно представить графически. Если, например, тело движется прямолинейно и сила F = const (рис. 4.2), то 2 2 1 1 A F ds cos Fs ds , (4.4) где s – пройденный телом путь. Тогда искомая работа А определяется на графике площадью закрашенной фигуры. В случае F ≠ const (рис. 4.3) работа также dA может быть изображена как площадь фигуры под Fs кривой зависимости Fs(s). Действующую на материальную точку силу F называют консервативной, если работа, A совершаемая этой силой при перемещении точки из одного произвольного положения в s другое, не зависит от формы траектории. ds При перемещении материальной точки вдоль замкнутой траектории, работа консервативной Рис. 4.3 силы тождественно равна нулю. Силы, работа которых зависит от траектории перемещения точки, называются неконсервативными. 174 Примерами консервативных сил могут служить силы тяготения, упругости, электростатического взаимодействия между заряженными телами. К неконсервативным силам относятся силы трения, магнитные силы. Чтобы характеризовать интенсивность совершения силой работы, вводится понятие мощности. Мощность – это скалярная физическая величина, характеризующая быстроту совершения работы и численно равная работе, совершаемой за единицу времени. В соответствии с этим определением средняя мощность Nср = ∆A/∆t . Мгновенная мощность есть предел средней при ∆t→0 : A dA . t 0 t dt N lim За время dt сила F совершает работу Fdr, развиваемая этой силой на элементарном участке пути, (4.5) так что мощность, N F dr dt F v , (4.6) т.е. скалярному произведению вектора силы на вектор скорости, с которой движется тело. Единица мощности – ватт (Вт); 1 Вт – мощность, при которой за время 1 с совершается работа в 1 Дж (1 Вт = 1 Дж/с). 4.2. Работа и мощность при вращательном движении Обсудим способ расчета совершенной работы при вращательном движении тела. Пусть сила F приложена к точке В тела, находящейся от оси вращения на расстоянии r, угол между направлением силы и радиусом вектором r обозначим . Работа этой силы равна работе, затраченной на поворот всего тела. При повороте тела на бесконечно малый угол d точка В проходит путь ds = rd , так что работа dA = F sin r d . Учитывая, что момент силы относительно оси Mz = Frsin , можно записать: dA= Mz d. (4.7) При повороте тела на конечный угол работа равна интегральной сумме элементарных работ: 2 Aвр М z d . 1 (4.8) 175 В частном случае Mz= const Авр = Мz . (4.9) Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота. Определение мощности при вращательном движении ее определению при поступательном движении (4.5). Мгновенная мощность может также быть выражена через угловую скорость вращения. В случае действия постоянного вращательного момента N вр dA d Mz M z M . dt dt (4.10) 4.3. Кинетическая энергия при поступательном движении В механике различают два вида энергии: кинетическую и потенциальную. Кинетическая энергия тела – это энергия, представляющая меру его механического движения и измеряемая той работой, которую может совершить тело при его торможении до полной остановки. Найдем выражение для кинетической энергии твердого тела В, имеющего массу m и движущегося поступательно со скоростью v. Пусть тело В тормозится, наталкиваясь на неподвижно закрепленное тело С и деформируя его. При этом тело В, действуя на тело С с некоторой силой F (в общем случае переменной), совершает на малом участке пути ds работу dA = F ds . По третьему закону Ньютона на тело В одновременно действует сила (–F), касательная которой (–F) вызывает изменение численного значения скорости тела. По второму закону Ньютона F m dv . dt Следовательно, dA m dv ds ds m dv , dt dt или dA mvdv . Работа, совершаемая телом В до полной остановки, (4.11) 176 0 mv2 A mvdv 2 . v (4.12) Итак, кинетическая энергия поступательно движущегося тела равна половине произведения массы этого тела на квадрат его скорости: Eк A mv2 . 2 (4.13) Из формулы (4.13) видно, что кинетическая энергия зависит только от массы и скорости тела и не может быть отрицательной (Ек 0). Выражение (4.13) справедливо, в частности, для кинетической энергии материальной точки. Если в процессе движения скорость тела изменяется от v1 до v2, то работа силы, вызвавшей это изменение, mv22 mv12 A Eк . 2 2 (4.14) Любую механическую систему можно рассматривать как совокупность материальных точек. Поэтому кинетическая энергия системы равна сумме кинетических энергий всех n материальных точек, образующих эту систему: n mi vi2 Eк , 2 i 1 (4.15) где mi, vi – масса и скорость i-й материальной точки. Таким образом, кинетическая энергия системы полностью определяется величинами масс и скоростей движения входящих в нее материальных точек. Она не зависит от того, каким образом части рассматриваемой системы приобрели данные значения скоростей. 4.4. Кинетическая энергия вращающегося тела Если вращающееся тело в процессе движения совершает работу Авр и при этом тормозится, изменяя угловую скорость от ω1 до 2 (1 > 2), то работа тормозящего момента силы определяется формулой (4.8), причем M = I = I (d/dt) . 177 Следовательно, изменение энергии тела можно представить в виде: 2 2 d d I22 I12 E Aвр Md Id I d I d I d d t d t 2 2 1 1 1 1 1 2 2 2 вр к или Aвр E вр к I2 2 . (4.16) Кинетическая энергия вращающегося тела равна половине произведения момента инерции тела на квадрат его угловой скорости. 4.5. Потенциальная энергия Тело обладает не только энергией движения, но и энергией взаимодействия с другими телами. Однако пока тело неподвижно, запас его энергии никак не проявляется. Энергия существует скрыто, и можно говорить лишь о потенциальных возможностях этого тела передавать свою энергию другим телам. Потенциальная энергия – это механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними. Потенциальной энергией обладает, например, тело, поднятое над Землей, сжатая или растянутая пружина и т.д. Следует, однако, отметить, что не всякое состояние и не всякое взаимодействие может характеризоваться потенциальной энергией. Состояние взаимодействующих тел может характеризоваться потенциальной энергией, если между ними действуют консервативные силы. В каждом конкретном случае величина потенциальной энергии зависит от характера взаимодействия и взаимного расположения тел (или частей тел). Потенциальная энергия физической системы может изменяться, если действующие силы совершают работу: Еп = –А = А′. (4.17) Здесь А – работа внутренних, а А′ – работа внешних для данной системы сил. Знак «минус» показывает, что внутренние силы совершают работу за счет убыли потенциальной энергии. Получим формулы для вычисления потенциальной энергии в двух практически важных случаях: 1 – для сил тяготения, 2 – для упругих сил. 178 1. Найдем работу, которую совершает сила тяготения со стороны Земли, действующая на некоторое тело при его перемещении по произвольному пути из точки 1, находящейся на высоте h1 над h поверхностью Земли, в точку 2, 1 h1 находящуюся на высоте h2. Перемещение dr может происходить по любому пути (рис. 4.4). mg Элементарная работа, совершаемая h2 2 силой тяготения при бесконечно малом 0 перемещении dr Рис. 4.4 dA mg dr mgdr соs . (4.18) Полная работа на конечном участке пути 2 2 2 1 1 1 A mgdr cos α mg dr cos α mg ( dh) mgh2 mgh1 ΔEп . (4.19) Здесь учтено, что проекция перемещения dr на направление h отрицательна и dr cos = dh. Из уравнения (4.19) видно, что работа, совершаемая силой тяготения при изменении высоты тела над поверхностью Земли, зависит только от начального и конечного положения тела относительно Земли и не зависит от формы пути, по которому происходило перемещение из начальной точки 1 в конечную точку 2. Это означает, что силы тяготения являются консервативными. Потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Это, однако, не отражается на физических законах, так как в них входит или разность потенциальных энергий в двух положениях тела, или производная Еп по координатам. Поэтому потенциальную энергию тела в некотором положении выбирают нулевой, а энергию тела в других положениях отсчитывают относительно нулевого уровня. Обычно таким нулевым уровнем отсчета выбирают поверхность Земли. Тогда потенциальная энергия тела, поднятого над поверхностью Земли на высоту h Eп = mgh . (4.20) Говоря об энергии, следует иметь в виду, что она всегда характеризует систему, состоящую, по крайней мере, из двух тел, и нет смысла говорить о движении или взаимодействии данного тела, если не указано другое тело, относительно которого данное тело движется или с которым оно взаимодействует. Как видно из формулы (4.19), работа, совершаемая силой тяготения при изменении относительного расположения тела и Земли, равна убыли 179 потенциальной энергии этой системы. Таким образом, когда потенциальная энергия тела уменьшается, работа силы тяготения положительна, и наоборот. Сила тяжести в данной системе является внутренней. 2. Мы рассмотрели потенциальную энергию, зависящую от взаимного расположения различных макроскопических тел. Теперь рассмотрим потенциальную энергию, зависящую от взаимного расположения частей одного и того же тела, например от расстояния между соседними витками растянутой или сжатой пружины. Опыт показывает, что для того чтобы сжать (или растянуть) пружину, необходимо приложить внешнюю силу. Эта сила в процессе деформации пружины совершает работу. В результате потенциальная энергия пружины увеличивается. Освобожденная от внешнего воздействия, пружина восстанавливает свою форму под действием силы упругости и совершает при этом работу. Вычислим работу, которую совершает внешняя сила при удлинении пружины от величины х1 до величины х2 (х1 < х2). Сила упругости пропорциональна деформации: Fx упр = – kx , где Fх упр – проекция силы упругости на ось х; k – коэффициент упругости, а знак минус указывает, что Fх упр. направлена в сторону, противоположную деформации х. По третьему закону Ньютона деформирующая сила равна по модулю силе упругости и противоположно ей направлена, т. е. Fx = – Fx упр. = kx . Элементарная работа dA, совершаемая внешней силой Fx при малой деформации dx, равна dA = Fx dx = kxdx, а полная работа Eп, упр x2 kx22 kx12 A kxdx 2 2 . x1 (4.21) Из формулы (4.21) видно, что произведенная работа не зависит от того, каким образом произошло изменение длины пружины. Упругая сила, также как и сила тяготения, консервативна. Принимая за нулевую потенциальную энергию недеформированной пружины (Еп = 0 при х = 0), получаем выражение потенциальной энергии деформированной пружины в виде Еп,упр. = kx2/2 . (4.22) Потенциальная энергия системы, подобно кинетической энергии, является функцией состояния системы. Она зависит только от конфигурации системы и ее положения по отношению к внешним телам. 180 4.6. Силы и потенциальная энергия Зная потенциальную энергию как функцию координат взаимодействующих материальных точек, можно вычислить действующие на эти точки силы. Рассмотрим сначала отдельную материальную точку, находящуюся в силовом поле неподвижных тел. Если силы консервативные, то можно ввести потенциальную энергию Еп, которой обладает материальная точка в рассматриваемом силовом поле. Величина Еп будет функцией радиуса-вектора r этой точки или ее координат x, y, z. Пусть точка переместилась на бесконечно малую величину dr . Если F сила, действующая на нее, то работа этой силы при таком перемещении будет равна убыли потенциальной энергии: F dr dEп . (4.23) В проекциях x, y, z уравнение (4.23) запишется в виде Fxdx + Fydy +Fzdz = dEп . Допустим, что смещение происходит вдоль какой-либо координатной оси, например х. Тогда Fxdx = [dEп]y,z и, следовательно, (4.24) одной dE Fx п . dx y,z Индексы y, z означают, что при смещении, а следовательно, и при дифференцировании координаты y и z не должны изменяться. Величины, получающиеся в результате такого дифференцирования, называются частными производными функции Еп. Они обозначаются символом , в отличие от символа d, применяемого при дифференцировании функций одного независимого переменного. Аналогичные соображения справедливы и для проекций силы вдоль остальных двух осей y, z. Таким образом, Fx = (∂Еп/∂х), Fy = (∂Еп/∂y), Fz = (∂Еп/∂z) . (4.25) Три формулы (4.25) можно объединить в одну векторную формулу. Для i этого умножим их на единичные векторы координатных осей , j , k и сложим. В результате получим: где F = grad Еп , (4.26) 181 grad Eп Еп x i Eп y j Eп z k . (4.27) Вектор, определяемый выражением (4.27), называется градиентом скаляра Еп. Для него наряду с обозначением grad Еп применяется также обозначение Еп, значок (набла) означает символический вектор, называемый оператором Гамильтона или набла-оператором: x i y j z k . (4.28) 4.7. Закон сохранения энергии С одной стороны, согласно уравнению (4.14) работа, совершаемая движущимся телом при изменении его скорости от v1 до v2 , определяется изменением кинетической энергии данного тела: mv22 mv12 A Eк . 2 2 С другой стороны, совершаемая внутренней силой работа равна убыли потенциальной энергии: А =Еп. Из этих двух уравнений можно получить: Ек1+Еп1 = Ек2+Еп2 . (4.29) Сумма кинетической и потенциальной энергий системы: Е = Ек + Еп, называется ее полной энергией. Таким образом, Е1 = Е2 или Е = Ек + Еп = const . (4.30) В системе с одними только консервативными силами полная энергия остается неизменной. Могут происходить лишь превращения потенциальной энергии в кинетическую и обратно, но полный запас энергии системы измениться не может. Это положение называется законом сохранения энергии в механике. Механические системы, в которых действуют только консервативные силы (внутренние и внешние), называются консервативными системами. Закон сохранения механической энергии можно сформулировать так: в консервативных системах полная механическая энергия сохраняется. Закон сохранения механической энергии связан с однородностью времени, т.е. инвариантностью физических законов относительно выбора начала отсчета времени. Например, при свободном падении тела в поле сил тяжести его скорость и пройденный путь зависят лишь от начальной скорости и продолжительности свободного падения тела и не зависят от того, когда тело начало падать. 182 Существует еще один вид систем – диссипативные системы, в которых механическая энергия постепенно уменьшается за счет преобразования в другие (немеханические) формы энергии. Этот процесс называется диссипацией (или рассеянием энергии). В системе, в которой действуют также неконсервативные силы, например силы трения, полная механическая энергия не сохраняется. Однако при «исчезновении» механической энергии всегда возникает эквивалентное До удара После удара v1 m1 u1 v2 m2 m1 u2 m2 Рис. 4.5 количество энергии другого вида. Таким образом, энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой. В этом и заключается физическая сущность закона сохранения энергии – сущность неуничтожимости материи и ее движения. 4.8. Применение законов сохранения к соударениям тел Рассмотрим применение законов сохранения механической энергии и импульса к расчету абсолютно упругого центрального удара двух тел. Абсолютно упругим называют такой удар, в результате которого не происходит превращения механической энергии системы соударяющихся тел в другие виды энергии. Пусть два абсолютно упругих шара с массами m1 и m2 до удара движутся поступательно со скоростями v1 и v2, направленными в одну и ту же сторону вдоль линии их центров, причем v1 v2. Нужно найти скорости шаров u1 и u2 после соударения (рис. 4.5). В процессе удара систему соударяющихся тел можно считать замкнутой. При абсолютно упругом ударе она, кроме того, консервативна. Следовательно, для решения этой задачи можно воспользоваться законом сохранения механической энергии и импульса. Перед ударом и после его завершения соударяющиеся тела не деформированы, т.е. потенциальную энергию системы в этих двух состояниях можно считать одинаковой и равной нулю. Тогда из закона сохранения механической энергии имеем m1v12 m2 v22 m1u12 m2 u 22 . 2 2 2 2 По закону сохранения импульса (4.31) 183 m1v1 m2v2 m1u1 m2u2 . (4.32) При прямом центральном ударе векторы скоростей шаров до и после удара направлены вдоль одной прямой – линии удара. Поэтому из (4.32) следует, что m1v1 m2v2 m1u1 m2u2 , (4.33) где v1, v2 , u1 и u2 проекции векторов v1 , v2 , u1 и u2 на ось координат, параллельную линии удара. Совместное решение уравнений (4.31) и (4.33) дает u1 v1 m1 m2 2m2 v2 , m1 m2 u2 v2 m2 m1 2m1v1 m1 m2 . (4.34) В формулах (4.34) скорости v1 и v2 могут иметь как одинаковые, так и противоположные знаки в зависимости от направлений векторов v1 и v2 . Рассмотрим некоторые частные случаи: 1. Массы шаров одинаковы (m1 = m2 = m). Тогда из выражения (4.34) следует, что u1 = v2 , u2 = v1 , т.е. при ударе шары обмениваются скоростями. 2. Масса второго шара во много раз больше массы первого (m2 >>m1). Тогда u1 2v2 – v1 , u 2 v2 . Если при этом второй шар до удара был неподвижен (v2 = 0), то u1 = v1 , u2 = 0 , т.е. первый шар отскакивает от неподвижного массивного шара и движется в обратную сторону со скоростью u1 = v1 . При абсолютно неупругом ударе потенциальная энергия деформации не возникает; кинетическая энергия тел полностью или частично превращается во внутреннюю энергию; после удара столкнувшиеся тела либо движутся с одинаковой скоростью, либо покоятся. При абсолютно неупругом ударе выполняется лишь закон сохранения импульса, закон сохранения механической энергии не соблюдается. Из выражения (4.35), положив u1 = u2 = u, найдем скорость движения шаров после абсолютно неупругого удара: u m1v1 m2 v2 . m1 m2 184 В заключение приводятся таблица аналогий в описании поступательного и вращательного движений (характеристики и законы). Таблица 4.1 Аналогии в описании поступательного и вращательного движений Поступательное движение Вращательное движение Eкпост mv2 2 dAпост Fds s2 Aпост Fds s1 N A t N пост dA dt Nпост =Fτ v ср пост Eквр I2 2 dAвр M d 2 Aвр M d 1 N Aвр t N вр dAвр dt ср вр Nвр = Мврω ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ 1. Какая величина называется энергией, а какая – работой? 2. Какая из двух величин – энергия и работа – является функцией состояния, а какая – процесса? 3. Как выражается в поступательном движении механическая работа: а) постоянной силы, направленной под углом к перемещению; б) нескольких постоянных сил; в) переменной силы; г) силы упругости; д) силы тяготения? 4. Изобразить графически работу: а) постоянной силы; б) переменной силы; 5. Как выражается работа во вращательном движении: а) при М = const; б) при М = f(t) ? 6. Какая величина называется мощностью? 7. Как записывается выражение средней мощности и мгновенной мощности? 8. Каково выражение мощности во вращательном движении? 9. Какая энергия называется кинетической, а какая – потенциальной? 10. Как выражается кинетическая энергия при поступательном и вращательном движениях? 11. Какие системы называются консервативными, а какие диссипативными? 12. Какие силы называются консервативными, какие – неконсервативными? 13. Сформулируйте закон сохранения энергии. 14. Как выражается потенциальная энергия? 15. Какой удар называется абсолютно упругим, какой – абсолютно неупругим? 16. Написать законы сохранения энергии и импульса для абсолютно упругого и абсолютно неупругого ударов. 185 5. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 5.1. Механические колебания Колебаниями называются процессы, отличающиеся той или иной степенью повторяемости. Таким свойством повторяемости обладают, например, качания маятника часов, колебания струны или ножек камертона, напряжение между обкладками конденсатора в контуре радиоприемника и т. д. В зависимости от физической природы повторяющегося процесса различают колебания механические, электромагнитные, электромеханические и т.д. Колебания широко распространены в природе и технике. Во многих случаях они играют отрицательную роль. Колебания моста, возникающие из-за толчков, сообщаемых ему колесами поезда при прохождении через стыки рельсов, колебания корпуса корабля, вызванные вращением гребного винта, вибрации крыльев самолета, – все эти процессы могут привести к катастрофическим последствиям. В подобных случаях задача заключается в том, чтобы предотвратить возникновение колебаний или, во всяком случае, воспрепятствовать тому, чтобы колебания достигли опасных размеров. Вместе с тем колебательные процессы лежат в самой основе различных отраслей техники. Например, на колебательных процессах основана вся радиотехника. В зависимости от характера воздействия на колебательную систему различают свободные (или собственные) колебания, вынужденные колебания, автоколебания и параметрические колебания. Свободными или собственными называются такие колебания, которые происходят в системе, предоставленной самой себе после того, как ей был сообщен толчок, либо после того, как она была выведена из положения равновесия. Примером могут служить колебания шарика, подвешенного на нити (маятник). Вынужденными называются такие колебания, в процессе которых колеблющаяся система подвергается воздействию внешней периодически изменяющейся силы. Примером служат колебания маятника настенных часов. Автоколебания, как и вынужденные колебания, сопровождаются воздействием на колеблющуюся систему внешних сил, однако моменты времени, когда осуществляются эти воздействия, задаются самой колеблющейся системой – система сама управляет внешним воздействием. Примером автоколебательной системы являются часы, в которых маятник получает толчки за счет энергии поднятой гири или закрученной пружины, причем эти толчки происходят в моменты прохождения маятника через среднее положение. При параметрических колебаниях за счет внешнего воздействия происходит периодическое изменение какого-либо параметра системы, 186 например длины нити, к которой подвешен шарик, совершающий колебания. Простейшими являются гармонические колебания, т.е. такие колебания, при которых колеблющаяся величина (например, отклонение маятника) изменяется со временем по закону синуса или косинуса. Этот вид колебаний особенно важен по следующим причинам: 1) колебания в природе и технике часто имеют характер, очень близкий к гармоническим; 2) периодические процессы иной формы (с другой зависимостью от времени) могут быть представлены как наложение нескольких гармонических колебаний. 5.2. Гармонические колебания Рассмотрим систему, представляющую собой шарик массой m, подвешенный на нити. Сообщим шарику смещение x = A, после чего предоставим систему самой себе. Под действием квазиупругой силы (силы, зависящие от смещения по закону Fx = kx, независимо от их природы называются квазиупругими) шарик будет двигаться к положению равновесия с возрастающей скоростью v dx x . dt При этом потенциальная энергия системы будет убывать, но зато появится все возрастающая кинетическая энергия mv2 Eк . 2 Достигнув положения равновесия, шарик продолжит движение по инерции. Это движение будет замедленным и прекратится тогда, когда кинетическая энергия полностью перейдет в потенциальную, т.е. когда смещение шарика станет равным (А). Затем аналогичный процесс будет протекать при движении шарика в обратном направлении. Если трение в системе отсутствует, то полная энергия должна сохраняться, и шарик будет двигаться в пределах от х = А до х = А неограниченно долго. Уравнение второго закона Ньютона для шарика имеет вид d2 x m 2 kx . dt (5.1) Введя обозначение ω02 k , m (5.2) 187 преобразуем уравнение (5.1) следующим образом: d2 x ω02 x 0 . 2 dt (5.3) Итак, при отсутствии сил трения движение под действием квазиупругой силой описывается уравнением (5.3). Это уравнение представляет собой дифференциальное уравнение собственных незатухающих колебаний. 5.2.1. Кинематические характеристики гармонического колебания Общее решение уравнения (5.3) имеет вид: x = A cos (ω0t + α) , (5.4) где А и α – произвольные постоянные. Таким образом, смещение х изменяется со временем по закону косинуса. Следовательно, движение системы, находящейся под действием силы вида F = kx, представляет собой гармоническое колебание. Реальные колебания бывают гармоническими, если они малые, любые конечные колебания ангармоничны. График гармонического колебания, т.е. x график функции (5.4), показан на рис. 5.1. По +A горизонтальной оси отложено время t, по вертикальной оси – смещение х. t Поскольку косинус изменяется в 0 пределах от –1 до +1, значения х лежат в T пределах от –А до +А. Величина A наибольшего отклонения системы от положения равновесия называется Рис. 5.1 амплитудой колебания. Амплитуда А постоянная положительная величина. Ее значение определяется величиной начального отклонения или толчка, которым система была выведена из положения равновесия. Величина (0t+), стоящая под знаком косинуса, называется фазой колебания. Она характеризует состояние колеблющейся системы в произвольный момент времени t. Постоянная , характеризующая состояние системы в начальный момент времени t = 0, называется начальной фазой колебания. Поскольку косинус – периодическая функция с периодом 2, различные состояния системы, совершающей гармонические колебания, повторяются через такой промежуток времени Т, за который фаза колебания получает приращение, равное 2 (рис.5.1). Этот 188 промежуток времени называется периодом колебания. Он может быть определен из условия ω0 t T α ω0t α 2π , откуда T 2 0 . (5.5) Число колебаний, совершающихся в единицу времени, называется частотой колебания . Частота связана с периодом колебания Т следующим образом: 1 T . (5.6) За единицу частоты принимается частота такого колебания, период которого равен 1 с. Эту единицу называют герцем (Гц). Частота в 103 Гц называется килогерцем (кГц), в 106 Гц – мегагерцем (МГц). Из соотношения (5.5) следует, что: 0 2 T . (5.7) Таким образом, 0 дает число колебаний за 2 секунд. Величина 0 называется циклической (круговой) собственной частотой колеблющейся системы. Она связана с частотой соотношением 0 = 2 . (5.8) Продифференцировав (5.4) по времени, получим выражение для скорости тела, совершающего колебательное x движение: +A v = x A0 sin (0t + ) = π A0 cos (0t + + ) . (5.9) 2 t –A v +A Как видно из (5.9), скорость также изменяется по –A гармоническому закону, причем +A2 a амплитуда колебаний скорости A0. Из сравнения (5.4) и (5.9) следует, 2 что скорость с амплитудой А0 –A опережает смещение по фазе на Е 2. Продифференцировав (5.9) по 0 времени еще раз, найдем выражение для ускорения этого тела: t t Eк En t Рис. 5.2 189 2 а = v x A ω 0 cos (0 t +) = =A ω 0 cos (0 t + +) . 2 (5.10) Как следует из (5.10), ускорение и смещение меняются в противофазе. Это означает, что в тот момент, когда смещение достигает положительного наибольшего значения, ускорение достигает наибольшего по модулю отрицательного значения, и наоборот. На рис. 5.2 сопоставлены графики для смещения, скорости и ускорения. 5.2.2. Динамические характеристики гармонического колебания Сила прямо пропорциональна смещению и направлена к положению равновесия, т.е. F = kx. Подставив в это выражение значения k и x из (5.2) и (5.4), получим: F = A ω 0 cos (0 t +) = ma . 2 Как видно из этого выражения, период и фаза силы совпадает с периодом и фазой ускорения. Квазиупругая сила является консервативной, поэтому полная энергия гармонического колебания должна оставаться постоянной. В процессе колебаний происходит превращение кинетической энергии в потенциальную и обратно, причем в моменты наибольшего отклонения от положения равновесия полная энергия Е состоит только из потенциальной энергии, которая достигает своего наибольшего значения Еп,max : k A2 E = Еп,max = . (5.11) 2 При прохождении же системы через положение равновесия полная энергия состоит лишь из кинетической энергии, которая в эти моменты достигает своего наибольшего значения Ек,max : 2 mvmax mA2ω02 E = Eк,max= . 2 2 (5.12) Выясним, как изменяются со временем кинетическая и потенциальная энергии гармонического колебания. Кинетическая энергия (с учетом выражения (5.9)) mv2 mA2ω02 Eк = sin2 (0 t + ) . (5.13) 2 2 190 Потенциальная энергия kx2 kA2 Еп = cos2 (0 t + ) . 2 2 Складывая (5.13) с (5.14) и принимая во внимание, что формулу для полной энергии: kA2 mA2ω02 E Eк En . 2 2 (5.14) mω02 k , получим (5.15) 5.3. Маятник В физике под маятником понимают твердое тело, совершающее под действием квазиупругой силы колебания вокруг неподвижной точки или оси. Наиболее часто рассматривают математический и физический маятники. 5.3.1. Математический маятник Математическим маятником называют идеализированную систему, состоящую из невесомой и нерастяжимой нити, на которой подвешено тело масса которого сосредоточена в одной точке, и которое совершает колебательное движение под действием силы тяжести. Достаточно хорошим приближением к математическому маятнику служит небольшой тяжелый М M шарик, подвешенный на длинной тонкой нити. z Выведем уравнение движения математического маятника. Отклонение его от положения равновесия будем l характеризовать углом , образованным нитью с вертикалью (рис. 5.3). При отклонении маятника от положения l sin равновесия возникает вращательный момент М, равный по величине mgl sin mg (m – масса, l – длина маятника). Этот момент направлен так, что стремится Рис. 5.3 вернуть маятник в положение равновесия, и его действие аналогично действию квазиупругой силы. Поэтому так же, как смещению и квазиупругой силе, проекциям момента М и углового смещения на ось z нужно приписывать 191 противоположные знаки. Следовательно, выражение для вращательного момента имеет вид: M = mgl sin . (5.16) Запишем для маятника уравнение динамики вращательного движения. Обозначим угловое ускорение через ε d dt . Учитывая, что момент инерции маятника I = ml2 (момент инерции для материальной точки), получим 2 2 d 2 ml = mgl sin dt 2 2 (5.17) Разделив обе части уравнения на (ml) и введя обозначение g l ω 02 , (5.18) выражение (5.16) можно переписать в виде d 2 ω02 sin 0 . 2 dt (5.19) Ограничимся рассмотрением малых колебаний, тогда можно положить sin . (5.20) С учетом (5.20) выражение (5.19) примет вид d 2 ω02 0 . 2 dt (5.21) Уравнение (5.21) представляет собой дифференциальное уравнение колебаний математического маятника. Его решение имеет вид = A cos (0 t +) . (5.22) Следовательно, при малых колебаниях угловое смещение математического маятника изменяется со временем по гармоническому закону. Как следует из (5.18), частота колебаний математического маятника зависит только от ускорения свободного падения и от длины маятника и не зависит от его массы. Формула (5.5) с учетом (5.18) дает выражение для периода колебаний математического маятника: 192 T 2π l g . (5.23) 5.3.2. Физический маятник Физическим маятником называется любое твердое тело, способное под действием силы тяжести совершать колебания вокруг неподвижной оси, не совпадающей с его центром инерции (рис. 5.4). По аналогии с уравнением для математического маятника запишем уравнение для физического маятника: d 2 I = mgl sin , (5.24) dt 2 где m – масса маятника; l – расстояние между точкой подвеса О и центром инерции С маятника (рис. 5.4). Знак минус в выражение (5.24) имеет то же значение, что и в формуле (5.16). В случае малых колебаний выражение (5.24) переходит в уже известное нам уравнение d 2 ω02 0 . 2 dt (5.25) O l lпр C В данном случае ω02 M mgl . IO (5.26) mg O Рис. 5.4 Момент инерции физического маятника относительно оси, проходящей через точку подвеса, можно представить в виде: IO mgl . ω02 (5.27) Выражение (5.25) представляет собой дифференциальное уравнение колебаний физического маятника. Решение уравнения (5.25) имеет вид: = 0 cos (0 t +) . (5.28) Из уравнения (5.28) следует, что при малых отклонениях от положения равновесия физический маятник совершает гармонические колебания, частота которых зависит от массы маятника, момента инерции маятника относительно 193 оси вращения и расстояния между осью вращения и центром инерции маятника. В соответствии с (5.26) период колебания физического маятника определяется выражением T 2π IO mgl . (5.29) Приведенной длиной физического маятника называется длина такого математического маятника, период колебаний которого совпадает с периодом колебаний данного физического маятника. Из сопоставления формул (5.23) и (5.29) следует, что приведенной длиной физического маятника будет выражение lпр IO . ml (5.30) Точка на прямой, соединяющей точку подвеса с центром инерции, лежащая на расстоянии приведенной длины от оси вращения, называется центром качания физического маятника (см. точку О на рис. 5.4). Точка подвеса и центр качания обладают свойством взаимности: при переносе точки подвеса в центр качания прежняя точка подвеса становится новым А центром качания. 0 5.4. Сложение гармонических колебаний О х х Векторное изображение колебаний Рис. 5.5 облегчает и делает более наглядным решение ряда практически важных задач, в частности сложение нескольких колебаний одинаковой частоты. Если изображать колебания графически с помощью векторов, вращающихся с угловой скоростью 0, равной собственной частоте колебания, то полученная таким способом схема, называется векторной диаграммой. Возьмем ось, которую обозначим буквой х (рис. 5.5). Из точки О, взятой на оси, отложим вектор длины А, образующий с осью угол . Если привести этот вектор во вращение с угловой скоростью 0, то проекция конца вектора будет перемещаться по оси х в пределах от А до +А, причем координата этой проекции будет изменяться со временем по закону: х =А cos (0 t +). 194 Следовательно, проекция конца вектора на ось будет совершать гармоническое колебание, амплитуда которого равна длине вектора, круговая частота угловой скорости вращения вектора, а начальная фаза углу, образуемому вектором с осью в начальный момент времени. На практике часто приходится иметь дело с таким движением, при котором тело участвует одновременно в двух или нескольких колебаниях. Например, если груз подвешен на пружине к потолку вагона, то груз совершает колебания относительно точки подвеса, которая, в свою очередь, колеблется на рессорах вагона. Таким образом, А груз совершает движение, складывающееся из двух А колебаний одного направления. 2 2 1 А 1 2 1 x x 1 Рис. 5.6 x 2 Примером сложения колебаний различного направления является движение пучка электронов в электронноxлучевой трубке под действием двух взаимно перпендикулярных электрических полей. Рассмотрим два наиболее простых случая сложения гармонических колебаний. 5.4.1. Сложение колебаний одной частоты, направленных вдоль одной прямой Пусть тело участвует одновременно в двух гармонических колебаниях одной частоты 0 .Смещение х колеблющегося тела будет суммой смещений х1 и х2, которые запишутся следующим образом: х1 = А1 cos (0t +1), x2 = A2 cos (0t+ 2). (5.31) Представим оба колебания с помощью векторов А1 и А2 (рис. 5.6). Построим по правилам сложения векторов результирующий вектор А. Проекция этого вектора на ось х равна сумме проекций слагаемых векторов: х = х1 + х2 . Следовательно, вектор А представляет собой результирующее колебание. Этот вектор вращается с той же угловой скоростью 0, что и векторы А1 и А2, так что результирующее движение будет гармоническим колебанием с частотой 0, амплитудой А и начальной фазой . Из построения видно, что 195 2 2 2 2 А2 =А 1 A2 2 А1А2 cos π (α 2 α1 ) A1 A2 2 A1 A2 cos ( α2 α1 ) , tg α A1sin α1 A2sin α 2 A1cos α1 A2cos α 2 . (5.32) (5.33) Проанализируем выражение (5.32) для амплитуды: 1. Если разность фаз обоих колебаний 2 1 = 0, то амплитуда результирующего колебания А = А1 + А2 . 2. Если 2 1 = π , т.е. оба колебания находятся в противофазе, то A A1 A2 . Если частоты колебаний х1 и х2 неодинаковы, векторы А1 и А2 будут вращаться с различной скоростью. В этом случае результирующий вектор А пульсирует по величине и вращается с непостоянной скоростью. Результирующим движением в этом случае будет не гармоническое колебание, а некоторый сложный процесс. 5.4.2. Биения Особый интерес представляет случай, когда два складываемых гармонических колебания мало отличаются по частоте. Результирующее движение при этих условиях можно рассматривать как гармонические колебания с пульсирующей амплитудой. Такие колебания называются биениями. Обозначим частоту одного из колебаний через , а частоту второго колебания через + . По условию << . Амплитуды обоих колебаний будем полагать одинаковыми и равными А. Допустим, что начальные фазы обоих колебаний равны нулю, тогда уравнения колебаний будут иметь следующий вид: x1 = A cos t , x2 = A cos ( + ) t . (5.34) Складывая эти выражения и применяя тригонометрическую формулу для суммы косинусов, получим 196 x = x1 + x2 = (2A cos Δω t ) cos t 2 (5.35) (во втором множителе пренебрегаем членом по сравнению с ). График функции (5.35) представлен на рис. 5.7, а. Изображен случай / = 10. Заключенный в скобки множитель в формуле (5.35) изменяется гораздо медленнее, чем второй множитель. Вследствие условия >> за то время, за которое множитель cos t совершает несколько полных колебаний, множитель, стоящий в скобках, почти не изменится. Это дает нам основание рассматривать колебание (5.35) как гармоническое колебание частоты , амплитуда которого изменяется по некоторому периодическому закону. График амплитуды показан на рис. 5.7,б. Аналитическое выражение амплитуды, очевидно, имеет вид Δω t . Амплитуда = 2 A cos (5.36) 2 Выражение (5.36) является периодической функцией с частотой, в 2 раза превышающей частоту выражения, стоящего под знаком модуля, т.е. с частотой . Таким образом, частота пульсаций амплитуды – ее называют частотой биения – равна разности частот складываемых колебаний. 5.4.3. Сложение взаимно перпендикулярных колебаний T=2/ x M1 t а Ta=2/() M2 A б t Рис. 5.7 Рассмотрим результат сложения двух взаимно перпендикулярных гармонических колебаний одной частоты 0, происходящих вдоль координатных осей x и y. Если возбудить оба колебания, то материальная точка будет двигаться по некоторой, вообще говоря, криволинейной траектории, форма которой зависит от разности фаз обоих колебаний. 197 Выберем начало отсчета времени так, чтобы начальная фаза первого колебания была равна нулю. Тогда уравнения колебаний запишутся следующим образом: x = A cos 0 t, y = B cos (0 t + ) , (5.37) где разность фаз обоих колебаний. Выражение (5.37) представляет собой заданное в параметрической форме уравнение траектории, по которой движется тело, участвующее в обоих колебаниях. Чтобы получить уравнение траектории в обычном виде, нужно исключить из уравнений (5.37) параметр t. Из первого уравнения следует, что x . A (5.38) x2 1 2 . A (5.39) cos0 t Следовательно, sin 0 t = Теперь развернем косинус во втором из уравнений (5.37) по формуле для косинуса суммы, подставляя при этом вместо cos 0 t и sin 0 t их значения (5.38) и (5.39). В результате получим y x x2 cos α sin α 1 2 . B A A (5.40) Последнее уравнение после несложных преобразований можно привести к виду y2 x2 2 xy cos α = sin2 . (5.41) 2 2 + AB B A Из аналитической геометрии известно, что уравнение (5.41) есть уравнение эллипса, оси которого ориентированы относительно координатных осей x и y произвольно. Ориентация эллипса и величина его полуосей зависят довольно сложным образом от амплитуд А и В и разности фаз . Исследуем форму траектории в некоторых частных случаях: 1. Разность фаз равна нулю, т.е. = 0. В этом случае уравнение (5.41) принимает вид 2 x y 0, A B откуда получается уравнение прямой 198 y B x . A (5.42) Колеблющаяся точка перемещается по этой прямой, причем расстояние 2 2 ее от начала координат r x y . Подставляя сюда выражение (5.37) для x и y и учитывая, что = 0, получим закон, по которому r изменяется со временем: r A2 B 2 cos ω0t . (5.43) Из (5.43) следует, что результирующее движение является гармоническим колебанием вдоль прямой с частотой 0 и амплитудой, равной 5.8). A2 B 2 (рис. y y В В А x А x А А В В Рис. 5.8 Рис. 5.9 2. Разность фаз = . Уравнение (5.41) имеет вид 2 x y 0, A B откуда получается, что результирующее движение представляет собой гармоническое колебание вдоль прямой (рис. 5.9.) y B x. A 3. При = /2 уравнение (5.41) переходит в уравнение эллипса x2 y 2 1 , A2 B 2 (5.44) 199 приведенного к координатным осям, причем полуоси эллипса равны соответствующим амплитудам колебаний. При равенстве амплитуд эллипс вырождается в окружность. Случаи α π 2 и α π 2 отличаются направлением движения по эллипсу или по окружности. Если при α π 2 уравнение (5.41) можно записать следующим образом: x =A cos 0 t, y = B sin 0 t , (5.45) y B = /2 1 0 A x = +/2 то в момент t = 0 тело находится в точке 1 (рис. 5.10). В последующие моменты времени координата x уменьшается, а координата y становится отрицательной. Следовательно, движение совершается по часовой стрелке. При α π 2 уравнения колебания имеют вид x = A cos 0 t, Рис. 5.10 y = B sin 0 t . (5.46) Отсюда можно заключить, что движение происходит против часовой стрелки. Из сказанного следует, что равномерное движение по окружности радиуса R с угловой скоростью 0 может быть представлено как сумма двух взаимно перпендикулярных колебаний: x = R cos 0 t, y = R sin 0 t , (5.47) 200 (знак «+» в выражении для y соответствует движению против часовой стрелки, знак «» – движению по часовой стрелке). В случае, когда частоты взаимно перпендикулярных колебаний отличаются на очень малую величину 0, их можно рассматривать как колебания одинаковой частоты, но с изменяющейся разностью фаз. В самом деле, уравнения колебаний можно представить следующим образом: y B A A B Рис. 5.11. x = A cos 0 t , y B y= B cos [0 t+(0 t +)] , (5.48) и выражение 0t+ рассматривать как разность фаз, медленно изменяющуюся со временем по линейному закону. Результирующее движение в этом случае происходит по медленно видоизменяющейся кривой, которая последовательно принимает форму, отвечающую всем значениям разности фаз от до +. Если частоты взаимно перпендикулярных колебаний не одинаковы, то траектория результирующего движения имеет вид довольно сложных кривых, называемых фигурами Лиссажу. На рис. 5.11 показана одна из простейших траекторий, получающаяся при отношении частот 1:2 и разности фаз, равной /2. Уравнения колебаний имеют следующий вид A 0 A x B Рис. 5.12 y В А А x В Рис. 5.13 X = A cos 0 t, y = B cos (20 t+/2). x 201 За то время, пока вдоль оси x точка успевает переместиться из одного крайнего положения в другое, вдоль оси y, выйдя из нулевого положения, она успевает достигнуть одного крайнего положения, затем другого и вернуться в нулевое положение. При отношении частот 1:2 и разности фаз, равной нулю, траектория вырождается в незамкнутую кривую (рис. 5.12), по которой точка движется туда и обратно. Чем ближе к единице дробь, выражающая отношение частот колебаний, тем сложнее оказывается фигура Лиссажу. На рис. 5.13. для примера показана кривая для отношения частот 3:4 и разности фаз, равной /2. 5.5. Затухающие колебания Во всякой реальной колебательной системе имеются силы сопротивления, действие которых приводит к уменьшению энергии системы. Если убыль энергии не восполняется за счет работы внешних сил, то колебания Fx будут затухать. В простейшем случае сила сопротивления пропорциональна величине скорости: dx Fx r . (5.49) dt Здесь r постоянная величина, называемая коэффициентом сопротивления среды. Знак минус обусловлен тем, что сила Fx и скорость v имеют противоположные направления, поэтому их проекции на ось х имеют разные знаки. Уравнение второго закона Ньютона при наличии сил сопротивления имеет вид d2 x dx m 2 kx r . dt dt (5.50) Применив обозначение 2 r , m ω02 k m (5.51) (r коэффициент сопротивления среды, т.е. коэффициент пропорциональности между скоростью dx dt и силой сопротивления; k – коэффициент квазиупругой силы; 0 – собственная частота колебания системы), перепишем уравнение (5.50) следующим образом: d2 x dx 2β ω 02 x 0 . 2 dt dt (5.52) 202 Это дифференциальное уравнение описывает затухающие колебания системы. При не слишком сильном трении общее решение уравнения (5.52) имеет вид: x = A0 e t cos ( t+) . (5.53) Здесь А0 и произвольные постоянные; ω ω02 β 2 , частота, с которой система совершает затухающие колебания. На рис. 5.14 представлен график А0 функции (5.53). Пунктирными линиями x0 показаны пределы, в которых находится смещение колеблющейся точки х. В соответствие с видом функции (5.53) движение системы можно рассматривать как гармоническое колебание частоты с амплитудой, изменяющейся по закону А(t) = А0 e t. (5.54) x A0 et t T Рис. 5.14 (5.55) Верхняя из пунктирных кривых на рис. 5.14 дает график функции А(t), причем величина А0 представляет собой амплитуду в начальный момент времени. Начальное смещение х0 зависит, кроме А0, также от начальной фазы : х0 =А0 cos . Скорость затухания колебаний определяется величиной = r/2m, которую называют коэффициентом затухания. Определим физический смысл коэффициента затухания. Для этого найдем время , за которое амплитуда уменьшается в е раз. По t 1 определению е = e , откуда = 1. Следовательно, коэффициент затухания обратно пропорционален по величине тому промежутку времени , за который амплитуда уменьшается в е раз (е = 2,72 – основание натурального логарифма). Согласно формуле (5.5) период затухающих колебаний T 2π ω02 β 2 . (5.56) 203 При незначительном сопротивлении среды (2 << ω 0 ) период колебаний практически равен Т0 = 2/0. С ростом коэффициента затухания период колебаний увеличивается. Отношение значений амплитуд, соответствующих моментам времени, отличающимся на период A(t ) e t . (5.57) A(t T ) 2 Это отношение называют декрементом затухания, а его логарифм логарифмическим декрементом затухания (): λ ln A(t ) βT . A(t T ) (5.58) Определим физический смысл логарифмического декремента затухания. Для этого перепишем выражение (5.55) с учетом (5.58) в виде А= А0 е (/Т) t . За время , за которое амплитуда уменьшается в е раз, система успевает совершить Nе = /Т колебаний. Из условия е(/Т) t = е1 получается, что τ λ λN e 1 . Следовательно, логарифмический декремент затухания T обратен по величине числу колебаний, совершаемых за то время, за которое амплитуда уменьшается в е раз. 5.6. Вынужденные колебания Теперь пусть колебательная система подвергается действию внешней силы, изменяющейся со временем по гармоническому закону: Fx = F0 cos t . (5.59) В этом случае уравнение второго закона Ньютона имеет вид: d2 x dx m 2 kx r F0cos Ωt . dt dt Используя обозначения образом: (5.51), запишем это уравнение следующим 204 d2 x dx 2β ω02 x f0 cos Ωt , 2 dt dt (5.60) где f0 = F0 /m (5.61) является амплитудой удельной силы (т.е. силы на единицу массы). Уравнение (5.60) описывает вынужденные колебания. Это неоднородное дифференциальное уравнение второго порядка. Общее решение неоднородного уравнения равно сумме общего решения соответствующего однородного уравнения и частного решения неоднородного уравнения. Общее решение однородного уравнения, совпадающее с уравнением (5.53),нам уже известно. Оно имеет следующий вид: x = A0 e t cos ( t + ) , (5.62) 2 2 где ω0 β . Найдем частное (не содержащее произвольных постоянных) решение уравнения (5.60). Для этого воспользуемся методом векторных диаграмм. Предположим, что частное решение уравнения (5.60) имеет вид x = A cos (t ) . (5.63) Тогда dx = A sin (t ) = A cos (t +/2) , dt d2x = 2A cos (t ) = 2A cos ( t + ) . dt 2 (5.64) (5.65) Подстановка выражений (5.64) и (5.65) в уравнение (5.60) приводит к 2 2 соотношению (ω - ω0 ) 2 2Acos(t + ) + 2Acos (t + /2) + ω 0 A cos (t ) = f0 cos t.(5.66) Из (5.66) следует, что постоянные А и должны иметь такие значения, чтобы гармоническая функция f0 cos t была равна сумме трех гармонических функций, стоящих в левой части уравнения. Если изобразить функцию ω 02 A cos (t ) вектором длины ω 02 A , направленным вправо (рис. 5.15), то функция 2A cos (t + /2) f0 2А ω02A ω 2 ω02 Рис. 5.15 205 2 изобразится вектором длиной 2А, повернутым относительно вектора ω 0 A против часовой стрелки на угол /2, а функция 2А cos (t + /2) – 2 вектором длиной 2А, повернутым относительно вектора ω 0 A на угол . Чтобы уравнение (5.60) было удовлетворено, сумма трех перечисленных векторов должна совпадать с вектором, изображающим функцию f0 cos t. Из рис. 5.15 , видно, что такое совпадение возможно лишь при значении амплитуды А, которое определяется условием 2 2 ( ω 0 2) А2 + 422А2 = f 0 , (5.67) откуда A f0 (ω02 ω2 ) 4β 2ω2 . (5.68) Рис. 5.15 позволяет получить также и значение , которое представляет собой величину отставания по фазе вынужденного колебания (5.63) от обусловившей его вынуждающей силы. Из рисунка следует, что tg 2β ω . ω02 ω 2 (5.69) Подставив в (5.63) значения А и , определяемые формулами (5.68) и (5.69), получим функцию, представляющую собой решение неоднородной части уравнения (5.60): f0 2β ω x cos (t – arctg ) . (5.70) ω02 ω2 (ω02 ω 2 ) 4β 2 ω 2 Функция (5.70) в сумме с (5.62) дает общее решение уравнения (5.60), описывающее поведение системы при вынужденных колебаниях: x f0 (ω ω ) 4β ω 2 0 2 2 2 cos (t – arctg x t Установлен ие колебаний Рис. 5.16 2β t cos (t + ) 2 ) + A0 e ω ω 02 (5.71) Второе слагаемое в уравнение (5.71) играет заметную роль только в начальной стадии процесса, при так называемом установлении колебаний (рис. 5.16). С течением времени из-за экспоненциального множителя et роль этого слагаемого все больше уменьшается, 206 и по прошествии достаточного времени им можно пренебречь, сохраняя лишь первое слагаемое. Таким образом, функция (5.70) описывает установившиеся вынужденные колебания. Они представляют собой гармонические колебания с частотой, равной частоте вынуждающей силы. Амплитуда (5.68) вынужденных колебаний пропорциональна амплитуде вынуждающей силы. Для данной колебательной системы амплитуда зависит от частоты вынуждающей силы. Вынужденные колебания отстают по фазе от вынуждающей силы, причем величина отставания также зависит от частоты вынуждающей силы (см. (5.69)). Зависимость амплитуды вынужденных колебаний от частоты вынуждающей силы приводит к тому, что при некоторой определенной для данной системы частоте амплитуда колебаний достигает максимального значения. Колебательная система оказывается особенно отзывчивой на действие вынуждающей силы при этой частоте. Явление резкого возрастания амплитуды вынужденных колебаний называется резонансом. Исследуем зависимость амплитуды вынужденных колебаний от параметров и и построим кривые (рис. 5.17). Из выражения (5.68) следует, A =0 1 2 3 F0/k рез 0 Рис. 5.17 что независимо от величины при = 0 амплитуда А = const = А0 (действует статическая сила) A0 f0 F . ω0 mω0 (5.72) 207 При А 0 . Явление резонанса возникает при частоте рез, которую можно найти, исследовав на экстремум функцию (5.68). Эта функция максимальна, когда ее знаменатель минимален. Продифференцировав подкоренное выражение в знаменателе (5.68) по и приравняв это к нулю, получим условие для определения рез.: 2 2 2( ω0 ωрез ) 2рез2 = 0, откуда ω рез ω 02 2β 2 . (5.73) Таким образом, максимум резонансной кривой смещен влево по оси от 0; это смещение будет тем больше, чем больше коэффициент затухания . Подставив (5.73) в (5.68), получим выражение амплитуды при резонансе: Арез Аmax f0 2β ω02 β 2 . (5.74) Формула (5.74) показывает, что, чем меньше коэффициент затухания, тем сильнее изменяется с частотой амплитуда вблизи резонанса и тем «острее» и выше получается максимум кривой вплоть до ее разрыва при = 0 (см. рис. 5.17). Вредные и полезные явления резонанса широко распространены в природе и технике. Явление резонанса важно в тех случаях, когда необходимо обнаружить слабые колебания или усилить их. На этом явлении основана вся аппаратура, воспринимающая и усиливающая звуковые и электрические колебания. Нередко явление механического резонанса служит причиной катастроф. Например, собственная частота вибраций корпуса корабля или крыльев самолета должна сильно отличаться от частоты колебаний, которые могут быть возбуждены вращением гребного винта или пропеллера. В противном случае могут возникнуть разрушения. При вращении плохо отцентрированного мотора вследствие явления резонанса может произойти его поломка и повреждение фундамента здания, на котором расположен мотор. ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ 1. 2. 3. 4. Какое движение называется колебательным? Какое колебание называется периодическим, гармоническим? Необходимое условие возникновения колебательного движения. Какие колебания называются свободными (собственными)? 208 5. Какие колебания называются собственными незатухающими? В каких системах они возможны? Приведите примеры. 6. Без наличия какой силы невозможно возникновение колебательного движения? 7. Запишите второй закон Ньютона для свободных незатухающих колебаний. 8. Запишите дифференциальное уравнение для свободных незатухающих колебаний. 9. Какой вид имеет уравнение гармонического колебания? 10. Каков физический смысл величин, входящих в уравнение гармонического колебания? 11. Что такое амплитуда колебаний, фаза колебаний? 12. Различия между частотой и циклической частотой. 13. Какая величина называется периодом колебаний и какова связь периода с частотой и циклической частотой? 14. Как выражаются в функции времени скорость и ускорение при гармоническом колебании? Как они сдвинуты по фазе относительно смещения от положения равновесия? 15. Как выражается энергия (кинетическая, потенциальная, полная) гармонического колебания? 16. Как изображается гармоническое колебание: а) графически, б) векторной диаграммой? 17. Какой маятник называется математическим, физическим? 18. Как выражается период колебаний математического маятника, физического маятника? 19. Какая величина называется приведенной длиной физического маятника? 20. Запишите амплитуду и начальную фазу колебания, полученного в результате сложения двух одинаково направленных гармонических колебаний с одинаковой частотой. 21. Запишите уравнение колебания, полученного в результате сложения двух одинаково направленных гармонических колебаний с одинаковой частотой. 22. При какой разности фаз амплитуда результирующего колебания, полученного в результате сложения двух одинаково направленных гармонических колебаний с одной частотой, будет иметь максимальное значение, минимальное значение? 23. Какой вид имеет уравнение траектории точки, участвующей одновременно в двух взаимно перпендикулярных гармонических колебаниях с одинаковой частотой? 24. При каких условиях траектория точки, участвующей одновременно в двух взаимно перпендикулярных гармонических колебаниях с одинаковой частотой, превращается в окружность, в прямую? 25. Что называется фигурами Лиссажу? 26. Какие колебания называются затухающими? 209 27. Запишите второй закон Ньютона для собственных затухающих колебаний. 28. Напишите дифференциальное уравнение (второй закон Ньютона) для собственных затухающих колебаний. 29. Запишите выражение для смещения от положения равновесия в случае собственных затухающих колебаний. 30. Запишите математическое выражение амплитуды затухающих колебаний. Изобразите графически изменение амплитуды затухающих колебаний со временем. 31. Изобразите графически собственные затухающие колебания. 32. Как зависит циклическая частота и период затухающих колебаний от коэффициента затухания? 33. Что называется коэффициентом затухания, декрементом затухания, логарифмическим декрементом затухания, временем релаксации, добротностью колебательной системы? 34. Какие из величин, характеризующих затухание в колебательной системе, определяются теоретически, а какие экспериментально и почему? 35. Какие колебания называются автоколебаниями? 36. Какие колебания называются вынужденными? 37. Запишите второй закон Ньютона для вынужденных колебаний. 38. Напишите дифференциальное уравнение (второй закон Ньютона) для вынужденных колебаний. 39. Чему равна частота установившихся вынужденных колебаний? 40. От каких величин зависит амплитуда установившихся вынужденных колебаний, начальная фаза вынужденных колебаний? 41. В чем заключается механический резонанс? 42. Изобразите резонансные кривые. Обратите внимание, что при этом откладывается на осях. Как изменяются резонансные кривые в зависимости от параметров системы? 43. Совпадает ли частота механического резонанса с частотой собственных незатухающих колебаний системы? Запишите выражение равновесной частоты. 44. Как усилить (ослабить) механический резонанс? 6. УПРУГИЕ ВОЛНЫ 6.1. Волновые процессы. Продольные и поперечные волны Колебания, возбужденные в какой-либо точке среды (твердой, жидкой или газообразной), распространяются в ней с конечной скоростью, зависящей от свойств среды, и передаются от одной точки среды к другой. Чем дальше расположена частица среды от источника колебаний, тем позднее она начинает колебаться. Иначе говоря, фазы колебаний частиц среды и источника тем 210 больше отличаются друг от друга, чем больше расстояние между частицей и источником. При изучении распространения колебаний не учитывается дискретное (молекулярное) строение среды, она рассматривается как сплошная, т.е. непрерывно распределенная в пространстве и обладающая упругими свойствами. Процесс распространения колебаний в сплошной среде называется волновым процессом (или волной). При распространении волны частицы среды не движутся вместе с волной, а колеблются около своих положений равновесия. Вместе с волной от частицы к частице среды передаются лишь состояние колебательного движения и его энергия. Поэтому основным свойством всех волн, независимо от их природы, является перенос энергии без переноса вещества. Среди разнообразных волн, встречающихся в природе и технике, выделяются следующие их типы: волны на поверхности жидкости, упругие и электромагнитные волны. Упругими волнами называются механические возмущения, распространяющиеся в упругой среде. Упругие волны бывают продольные и поперечные. В продольных волнах частицы колеблются в направлении распространения волны в поперечных – в плоскостях, перпендикулярных направлению распространения волны. Продольные волны могут распространяться в средах, в которых возникают упругие силы при деформации сжатия и растяжения, т.е. в твердых, жидких и газообразных телах. Поперечные волны могут распространяться в среде, в которой возникают упругие силы при деформации сдвига, т.е. фактически только в твердых телах; в жидкостях и газах возникают только продольные волны, а в твердых телах – как продольные, так и поперечные. Упругая волна называется гармонической, если соответствующие ей колебания частиц являются гармоническими. На рис. 6.1 представлена гармоническая поперечная волна, распространяющаяся со скоростью v вдоль оси x, т.е. приведена зависимость между смещением частиц среды, участвующих в волновом процессе, и расстоянием x этих частиц (например, частицы В) от источника колебаний О для какого-то фиксированного времени t. Несмотря на то, что приведенный график функции (x, t) похож на график гармонического колебания, эти графики различны по существу. График волны показывает зависимость смещения всех частиц среды от расстояния до источника колебаний в данный момент времени, v а график колебаний – зависимость смещения данной частицы от B времени. x О Расстояние между ближайшими частицами, колеблющимися в одинаковой фазе, называется длиной волны (см. рис. 6.1) Длина волны равна тому расстоянию, на которое x Рис. 6.1 211 распространяется определенная колебания за период, т.е. фаза l = vT, или, учитывая, что T = 1/ v = , v S где частота колебаний. Рис. 6.2 Если рассмотреть волновой процесс подробнее, то ясно, что колеблются не только частицы, расположенные вдоль оси х, но и совокупность частиц, расположенных в некотором объеме, т.е. волна, распространяясь от источника колебаний, охватывает все новые и новые области пространства. Геометрическое место точек, до которых колебания доходят к моменту времени t, называется волновым фронтом. Геометрическое место точек, колеблющихся в одинаковой фазе, называется волновой поверхностью. Волновых поверхностей можно провести бесчисленное множество, а волновой фронт в каждый момент времени один. Волновой фронт также является волновой поверхностью. В принципе волновые поверхности могут быть любой формы, а в простейшем случае они представляют собой совокупность плоскостей, параллельных друг другу, или совокупность концентрических сфер. Соответственно волна называется плоской или сферической. 6.2. Энергия упругих волн. Вектор Умова Бегущими называются волны, которые переносят в пространстве энергию. Перенос энергии в волнах количественно характеризуется вектором плотности потока энергии. Этот вектор для упругих волн называется вектором Умова. Направление вектора Умова совпадает с направлением переноса энергии, а его модуль равен энергии, переносимой волной за единицу времени через единичную площадку, расположенную перпендикулярно направлению распространения волны (плотность потока энергии). Найдем аналитическое выражение вектора Умова. Пусть S – часть фронта волны в некоторый момент времени t (рис. 6.2). По истечении времени t фронт волны переместится на расстояние l = vt, вследствие чего частицы среды в объеме V = S l придут в колебательное движение. Тогда через единичную площадку в единицу времени проходит энергия ΔW P , (6.1) ΔS Δt 212 где W – энергия, переносимая волной через площадку S за время t. Предполагая, что в пределах малого объема V энергия распределена однородно, можем записать W = wV = wSl , (6.2) где w объемная плотность потока энергии (энергия заключенная в единице объема). Подставив (6.2) в (6.1), получим wSl P wv . St Или, так как v – скорость распространения волны – является векторной величиной, то P wv . (6.3) Итак, вектор Умова совпадает по направлению с направлением скорости распространения волны и равен произведению объемной плотности энергии на вектор скорости распространения волны. Так как поглощением энергии при распространении волны мы пренебрегаем, то можно считать, что вся энергия колебаний частиц среды целиком определяется энергетическим излучением источника: W m 02 A02 2 . (6.4) Вся эта энергия передается частицам среды, вовлеченным в колебательный процесс. В выражении (6.4) m = V, где плотность среды, а V – объем, охваченный колебательным процессом. В итоге для средней объемной плотности энергии, переносимой волной, получим 2 2 W A0 0 w , (6.5) V 2 где 0 – собственная частота колеблющейся системы. 6.3. Уравнение бегущей волны. Фазовая скорость. Волновое уравнение Для вывода уравнения бегущей волны, представляющего собой зависимость смещения колеблющейся частицы от координат и времени, рассмотрим плоскую волну. Предположим, что колебания носят гармонический характер, а ось x совпадает с направлением распространения волны (см. рис. 213 6.1). В данном случае волновые поверхности перпендикулярны оси x, а так как все точки волновой поверхности колеблются одинаково, то смещение будет зависеть только от x и t, т.е. = (x, t). На рис. 6.1 рассмотрим некоторую частицу среды В, находящуюся от источника колебаний О на расстоянии х. Если колебания точек, лежащих в плоскости х = 0, описывается функцией (0,t) = A cos t, то частица среды В колеблется по тому же закону, но ее колебания будут отставать по времени от колебаний источника на , так как для прохождения волной расстояния х требуется время = x/v, где v – скорость распространения волны. Это так называемое уравнение запаздывания. Тогда уравнение колебания частиц, лежащих в плоскости х, имеет вид (x,t) = A cos [ (t – x/v)], (6.6) откуда следует, что (x,t) является не только периодической функцией времени, но и периодической функцией координаты х. Уравнение (6.6) есть уравнение бегущей волны. Если плоская волна распространяется в противоположном направлении, то (x,t) = A cos [ (t + x/v)]. В общем случае уравнение плоской волны, распространяющейся вдоль положительного направления оси х в среде, не поглощающей энергию, имеет вид (x,t) = A cos [ (t – x/v)+ 0], (6.7) где А = const – амплитуда волны; – циклическая частота волны; 0 – начальная фаза колебаний, определяемая в общем случае выбором начала отсчета х и t; [ (t – x/v)+ 0] – фаза плоской волны. Для характеристики волн используется волновое число 2 2 , (6.8) T v которое характеризует число волн, укладывающихся на отрезке 2 радиан. Учитывая (6.8), уравнению (6.7) можно придать вид k (x, t) = A cos (t – kx + 0), (6.9) где (t – kx + 0) – фаза распространяющейся волны. Знак «минус» перед слагаемым kx связан с явлением запаздывания. Рассмотрим точку пространства такую, что для нее фаза волны постоянна, т.е. (t – x/v)+0 = const . (6.10) 214 Продифференцировав выражение (6.10) и сократив его на , получим dt – dx/v = 0, откуда dx v . dt (6.11) Следовательно, скорость v распространения волны в уравнении (6.11) есть не что иное, как скорость перемещения фазы волны, ее называют фазовой скоростью. Повторяя ход рассуждений для плоской волны, можно доказать, что уравнение сферической волны, волновые поверхности которой имеют вид концентрических сфер, записывается как (r, t) = A0 cos (t – kr + 0) , r (6.12) где r – расстояние от центра волны до рассматриваемой точки среды. В случае сферической волны даже в среде, не поглощающей энергию, амплитуда колебаний не остается постоянной, а убывает с расстоянием по закону 1/r, поскольку энергия волновой поверхности распространяется по все большей площади (S = 4r2). Если фазовая скорость волн зависит от их частоты, то это явление называется дисперсией волн, а среда, в которой наблюдается дисперсия волн, диспергирующей средой. Распространение волн в однородной изотропной среде в общем случае описывается волновым уравнением – дифференциальным уравнением в частных производных: 2 2 2 1 2 (6.13) x 2 y 2 z 2 v 2 t 2 или 1 2 2 2 , (6.14) v t 2 2 2 где v – фазовая скорость; 2 2 2 оператор Лапласа. Решением x y z уравнения (6.14) является уравнение любой волны. Для плоской волны, распространяющейся вдоль оси х, волновое уравнение имеет вид 2 1 2 . x 2 v 2 t 2 (6.15) 215 6.4. Принцип суперпозиции. Групповая скорость Если среда, в которой распространяется одновременно несколько волн, линейна, т.е. ее свойства не изменяются под действием возмущений, создаваемых волной, то к волнам применим принцип суперпозиции. При распространении в линейной среде нескольких волн каждая из них распространяется так, как будто другие волны отсутствуют, а результирующее смещение частицы среды в любой момент времени равно геометрической сумме смещений, которые получают частицы, участвуя в каждом из слагающих волновых процессов. Исходя из принципа суперпозиции, любая волна может быть представлена в виде суммы гармонических волн, т.е. в виде волнового пакета, или группы волн. Волновым пакетом называется суперпозиция волн, мало отличающихся друг от друга по частоте, занимающая в каждый момент времени ограниченную область пространства. «Сконструируем» простейший волновой пакет из двух распространяющихся вдоль положительного направления оси х гармонических волн с одинаковыми амплитудами, близкими частотами и волновыми числами, причем d << и dk << k (d – разница этих частот; dk – разница волновых чисел). Тогда в результате наложения этих волн смещение td xdk cos (t – kx). = А0 cos(t – kx) + A0 cos (+d)t – (k+dk)x=2A0 cos 2 Полученная волна отличается от гармонической тем, что ее амплитуда td xdk A 2 A0cos 2 есть медленно изменяющаяся функция координаты х и времени t. За скорость распространения этой негармонической волны (волнового пакета) принимают скорость перемещения максимума амплитуды волны, рассматривая тем самым максимум в качестве центра волнового пакета. При условии, что td xdk = const, получим dx d u , dt dk (6.16) где скорость u называют групповой скоростью. Ее можно определить как скорость движения группы волн, образующих в каждый момент времени локализованный в пространстве волновой пакет. 216 Рассмотрим связь между групповой (6.16) и фазовой (6.13) скоростями. Учитывая что λ 2 / k (см. (6.8)), получим u dω d(vk) dv dv dλ λ dv vk v k( ) v k ( ) dk dk dk dλ dk k dλ или u v dv . d (6.17) Из формулы (6.17) вытекает, что u может быть как меньше, так и больше v в зависимости от знака dv d . В недиспергирующей среде dv d 0 и групповая скорость совпадает с фазовой. Понятие групповой скорости очень важно, так как именно она фигурирует при измерении дальности в радиолокации, в системах управления космическими объектами и т.д. В теории относительности доказывается, что групповая скорость u c, в то время как для фазовой скорости ограничений не существует. 6.5. Интерференция волн Согласованное протекание во времени и пространстве нескольких колебательных или волновых процессов связывают с понятием когерентности. Волны называются когерентными, если разность их фаз в каждой точке пространства остается постоянной во времени. При наложении двух когерентных волн в разных его точках получается усиление или ослабление результирующей волны в зависимости от соотношения между фазами этих волн. Это явление называется интерференцией волн. Пусть уравнения двух когерентных сферических волн, накладывающихся друг на друга, заданы в виде 1 = A0 cos (t – kr1 + 1), r1 2 = A0 cos (t – kr2 + 2), r2 где r1 и r2 – расстояния от источников волн до рассматриваемой точки, k – волновое число; 1 и 2 – начальные фазы обеих накладывающихся сферических волн. Безразмерная амплитуда результирующей волны 1 1 2 A2 A02 2 2 cos k r1 r2 1 2 . r1 r2 r1r2 217 Так как для когерентных источников разность начальных фаз (1 2) = =const, то результат наложения двух волн в различных точках зависит от величины = r1 – r2, называемой разностью хода волн. В точках, где k(r1 – r2) – (1 – 2) = 2m (m = 0, 1, 2, …), (6.18) наблюдается интерференционный максимум: безразмерная амплитуда результирующего колебания A A A 0 0 . r1 r2 Условие (6.18) называется условием интерференционного максимума. В точках, где k(r1 r2) – (1 2) = 2(m + 1) (m = 0, 1, 2, …), (6.19) наблюдается интерференционный минимум: амплитуда результирующего колебания A A A 0 0 , r1 r2 m называется соответственно порядком интерференционного максимума или минимума. 6.6. Стоячие волны Особым случаем интерференции являются стоячие волны – это волны, образующиеся при наложении двух бегущих волн, распространяющихся навстречу друг другу с одинаковыми частотами и амплитудами. Для вывода уравнения стоячей волны предположим, что две плоские волны распространяются навстречу друг другу вдоль оси х в среде без затухания, причем обе волны характеризуются одинаковыми частотами и амплитудами. Кроме того, начало координат выберем в точке, в которой обе волны имеют одинаковую фазу, а отсчет времени начнем с момента, когда фазы обеих волн равны нулю. Тогда соответственно уравнения волны, распространяющейся вдоль положительного направления оси х, и волны, распространяющейся ей навстречу, будут иметь вид 1 = A cos (t – kx), 2 = A cos (t + kx). (6.20) 218 Сложив эти уравнения и учитывая, что k = 2/, получим = 1+2 = 2Acos kx cos t = 2A cos (2x/) cos t . (6.21) Выражение (6.21) представляет собой уравнение стоячей волны. Из этого уравнения следует, что в каждой точке стоячей волны происходят колебания одной и той же частоты с амплитудой Аст = 2А cos (2x/) , зависящей от координаты х рассматриваемой точки. В точках среды, где 2x/ = m (m = 0, 1, 2, …) , (6.22) амплитуда колебаний достигает максимального значения, равного 2А. В точках среды, где 2x/ = (m +/2) (m = 0, 1, 2, …) (6.23) амплитуда колебаний обращается в нуль. Точки, в которых амплитуда колебаний максимальна (Аст = 2А), называются пучностями стоячей волны, а точки, в которых амплитуда колебаний равна нулю (Аст = 0), узлами стоячей волны. Точки среды, находящихся в узлах, колебаний не совершают. Из выражений (6.22) и (6.23) получим соответственно координаты пучностей и узлов: xп m (m = 0, 1, 2, …) ; (6.24) 2 1 xузл m 2 2 (m = 0, 1, 2, …) . (6.25) Из формул (6.24) и (6.25) следует, что расстояния между двумя соседними пучностями и двумя соседними узлами одинаковы и равны /2. Расстояние между соседними пучностью и узлом стоячей волны равно /4. В отличие от бегущей волны, все точки которой совершают колебания с одинаковой амплитудой, но с запаздыванием по фазе, все точки стоячей волны между двумя узлами колеблются с разными амплитудами, с одинаковыми фазами. При переходе через узел множитель 2A cos (2x /) меняет свой знак, поэтому фаза колебаний по разные стороны от узла отличается на , т.е. точки, лежащие по разные стороны от узла, колеблются в противофазе. Образование стоячих волн наблюдается при интерференции бегущей и отраженной волн. Что будет ли на границе отражения узел или пучность, зависит от соотношения плотностей сред. Если среда, от которой происходит отражение, менее плотная, то в месте отражения получается пучность (рис. 6.3,а), если более плотная – узел (рис. 6.3,б). В случае стоячей волны переноса энергии не наблюдается. 219 б а Аст Аст /2 x x Узел /2 Пучность Рис. 6.3 ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ 1. Какое движение называется волновым? 2. Какие волны называются продольными, поперечными? 3. Каковы физические условия возникновения продольных и поперечных волн? 4. Что такое фронт волны? 5. Что называется волновой поверхностью? 6. Какими величинами характеризуются волны в упругой среде? 7. Какая характеристика называется длиной волны? 8. Какими соотношениями длина волны связана со скоростью распространения волны и частотой? 9. Запишите уравнение плоской незатухающей бегущей волны. 10. Запишите волновое уравнение. 11. Каков физический смысл величин, входящих в уравнение плоской незатухающей бегущей волны? 12. Какая величина называется вектором Умова (вектором плотности потока энергии)? 7. МОЛЕКУЛЯРНАЯ ФИЗИКА 7.1. Предмет молекулярной физики и термодинамики. Статистический и термодинамический методы изучения макроскопических систем Молекулярная физика – это физика вещества. Она изучает молекулярную или тепловую форму движения материи. Ее задача – на основе представлений о молекулярном движении объяснить физические свойства вещества в газообразном, жидком и твердом состояниях, явления перехода из одного 220 состояния в другое, а также процессы, происходящие в веществе при различных внешних воздействиях: механических, термических и др. Свойства макроскопических тел (материальных объектов, состоящих из очень большого числа частиц), находящихся в различном агрегатном состоянии, можно изучать, пользуясь двумя взаимно дополняющими друг друга методами: 1) статистическим (молекулярно-кинетическим); 2) термодинамическим. Молекулярная физика изучает явления, которые составляют результат совокупного действия огромного числа частиц (в одном см 3 газа при нормальных условиях содержится 2,71019 молекул – число Лошмидта). Такие распространенные явления, как давление газа на стенки сосуда, явления переноса, тепловые явления и др., подчиняются законам больших чисел или, иначе, законам статистики. В основе статистического метода применительно к молекулярной физике лежит несколько утверждений: 1. Совокупность огромного количества молекул имеет такие свойства, каких нет у каждой молекулы в отдельности. Например, свойствами совокупности молекул являются давление, температура, теплопроводность, вязкость, диффузия и др., но нельзя говорить о давлении, температуры, вязкости одной молекулы. 2. Существует определенная количественная связь между свойствами коллектива молекул и средними значениями тех физических величин, которые характеризуют поведение и свойства каждой молекулы в отдельности. Например, средняя кинетическая энергия молекулы газа пропорциональна его абсолютной температуре, являющейся свойством коллектива молекул. 3. Свойства коллектива молекул являются макроскопическими свойствами, а свойства каждой молекулы в отдельности – микроскопическими. Связь между макроскопическими и микроскопическими свойствами устанавливается на основе теории вероятностей. При термодинамическом (энергетическом) подходе к изучению свойств макросистемы не рассматривается ее конкретное строение, механизм микропроцессов, игнорируются структурные элементы системы (частицы). Термодинамика интересуется лишь энергетическими характеристиками вещества. Она изучает способы и формы передачи энергии от одной системы к другой, закономерности превращения одних форм энергии в другие, направления протекания процессов в природе. Основной вопрос термодинамики – получение работы за счет тепловой энергии. 7.2. Основные положения молекулярно-кинетической теории Молекулярно-кинетическая теория (МКТ) основана на следующих положениях: 1. Все вещества состоят из атомов или молекул, размеры которых порядка -10 10 м. 221 2. Атомы и молекулы вещества разделены промежутками, свободными от вещества. Косвенным подтверждением этого факта является изменяемость объема тела. 3. Между молекулами тела одновременно действуют силы взаимного протяжения и силы взаимного отталкивания. 4. Молекулы всех тел находятся в состоянии беспорядочного непрерывного движения. Хаотическое движение молекул называют также тепловым движением. Скорость движения молекул связана с температурой тела в целом: чем больше эта скорость, тем выше температура. Таким образом, скорость движения молекул определяет тепловое состояние тела – его внутреннюю энергию. От интенсивности теплового движения молекул и интенсивности их взаимодействия зависит, в каком из возможных агрегатных состояний находится вещество (в твердом, жидком, газообразном, плазменном). По мере увеличения интенсивности теплового движения среднее расстояние между молекулами возрастает, а силы притяжения уменьшаются, и тело переходит из твердого состояния в жидкое. 7.3. Газообразное состояние вещества. Идеальный газ Любая реальная макроскопическая система – очень сложный объект, так как состоит из большого числа взаимодействующих частиц. Начнем рассмотрение закономерностей макросистем с самой простой – идеального газа. Идеальный газ – это идеализированная система частиц, обладающая следующими свойствами: 1. суммарный собственный объем частиц намного меньше размеров сосуда, в котором они находятся; 2. частицы взаимодействуют друг с другом только во время столкновений; 3. в промежутках между столкновениями частицы движутся свободно, прямолинейно и равномерно, причем время свободного движения гораздо больше времени взаимодействия; 4. столкновение частиц друг с другом и со стенками сосуда подчиняются законам абсолютно упругого столкновения; 5. полностью отсутствует упорядоченное движение частиц. Идеальный газ – это лишь простейшая модель газообразного состояния, но этой моделью описываются реальные газы в условиях, близких к нормальным, а также в условиях низкого давления и высокой температуры. 7.4. Параметры состояния идеального газа Физические величины, характеризующие то или иное состояние вещества, называются параметрами состояния. 222 Основными параметрами газообразного состояния являются масса газа m, объем V, давление р и температура Т. Под объемом V системы в случае идеального газа подразумевается пространство, предоставленное для движения молекул системы, т.е. объем сосуда, в котором заключен газ. Понятие массы было введено в разделе «механика». Давлением Р называется скалярная физическая величина, характеризующая распределение силы по поверхности, на которую она действует, и численно равная силе, действующей на единичную площадку в направлении, перпендикулярном к площадке. При равномерном распределении силы по плоской поверхности S давление F cos α Fn , S S (7.1) d( Fcos α) dFn , dS dS (7.2) p при неравномерном – p где - угол между направлением силы и направлением нормали к поверхности (рис.7.1). В системе СИ давление измеряется в паскалях (Па), S т.е. в Н/м2. Кроме того, используются внесистемные единицы: физическая атмосфера (атм), миллиметр ртутного n F столба (мм рт. ст.), бар и другие. 1атм = 1,013105 Па; 1 бар = =105 Па; 1 мм рт. ст.=133 Па. Рис. 7.1 Температура – это скалярная физическая величина, характеризующая интенсивность хаотического движения частиц системы и пропорциональная средней кинетической энергии поступательного движения одной частицы. Т = <пост.> , (7.3) где размерный коэффициент пропорциональности. Выражение (7.3) отражает определение абсолютной температуры. За начало отсчета абсолютной температуры – абсолютный нуль – принята такая температура, при которой прекращается хаотическое поступательное движение частиц системы: Т = 0, если <пост.> = 0. В этом смысле можно говорить, что температура характеризует степень нагретости тела. Абсолютная температура измеряется в системе СИ в градусах Кельвина (К). Она связана с температурой по шкале Цельсия соотношением: Т К = t С + 273,16. 223 7.5. Основное уравнение молекулярно-кинетической теории (уравнение Клаузиуса) и следствия из него Для вывода основного уравнения молекулярно-кинетической теории (МКТ) рассмотрим идеальный одноатомный газ. Предположим, что молекулы газа движутся хаотически и число взаимных столкновений между молекулами газа намного меньше, чем число ударов о стенки сосуда. Допустим, что столкновения молекул со стенками сосуда y носят характер абсолютно упругого удара. Выделим на стенке сосуда некоторую S элементарную площадку S (рис. 7.2) и вычислим давление, оказываемое на эту v площадку. При каждом соударении молекула, x движущаяся перпендикулярно площадке, передает ей импульс mivi –(–mivi) = 2mivi , где mi – масса i-й молекулы, vi – ее z vt скорость. За время t площадки S достигнут только те молекулы, которые Рис. 7.2 заключены в объеме параллелепипеда с основанием S и высотой vt (см. рис.7.2). Число этих молекул N = nV = nSvt (n = N/V – концентрация молекул, равная отношению числа молекул к объему занимаемого ими пространства). Необходимо учитывать, что реально молекулы движутся к площадке S под разными углами и имеют различные скорости, причем скорость молекул при каждом соударении меняется. Для упрощения расчетов хаотическое движение молекул заменяют движением вдоль трех взаимно перпендикулярных направлений, так что в любой момент времени вдоль каждого из них движется 1/3 молекул, причем половина молекул (1/6) движется вдоль данного направления в одну сторону, половина – в противоположную. Тогда число ударов молекул, движущихся в заданном направлении, о площадку S будет равно 1/6 nSvt. При столкновении с площадкой эти молекулы одинаковой массы передадут ей импульс P = 2mv1/6nSvt = 1/3nmSv2t . Тогда давление газа, оказываемое им на стенку сосуда, p F S ; согласно второму закону Ньютона F P t , поэтому P 1 nmv2 . (7.4) S t 3 Если газ в объеме V содержит N молекул, движущихся со скоростями v1, v2, ..., vN, то целесообразно рассматривать среднюю квадратичную скорость p 224 vкв 1 N v 2 i , (7.5) характеризующую всю совокупность молекул газа. Уравнение (4) с учетом (5) примет вид 1 2 p nm0 vкв . 3 (7.6) Выражение (7.6) называется основным уравнением молекулярнокинетической теории идеальных газов или уравнением Клаузиуса. Точный расчет с учетом движения молекул по всевозможным направлениям дает ту же формулу. Учитывая, что n N V , получим pV 1 Nm vкв 3 2 (7.7) или 2 m vкв pV N 3 2 2 2 Е, 3 (7.8) где Е – суммарная кинетическая энергия поступательного движения всех молекул газа. Уравнение (7.8) является еще одной формой записи основного уравнения молекулярно-кинетической теории идеального газа. Рассмотрим следствия, вытекающие из основного уравнения молекулярно-кинетической теории идеального газа: 1. Уравнение (7.8) позволяет получить все известные законы идеального газа: Гей-Люссака, Бойля – Мариотта, Шарля, Менделеева – Клапейрона и др. Действительно, если в сосуде объемом V при давлении р и температуре Т находится N молекул, то n = N/V, а Е = сТ в силу (7.3), где с – коэффициент пропорциональности. Тогда 2N p cT , 3V Коэффициент 2/3Nc = В зависит от массы газа и его природы. Если масса газа постоянна, то можно записать закон Клапейрона – Менделеева pV B const . T (7.9) 225 В соответствии с законом Авогадро моли всех газов при нормальных условиях занимают одинаковый объем, равный 22,4 м3/моль. Отсюда следует, что в случае, когда количество газа равно одному молю, величина В в (7.9) будет одинаковой для всех газов и ее можно обозначить буквой R и назвать универсальной газовой постоянной (R = 8,31 Дж/(Кмоль)). Тогда уравнение (7.9) для одного моля запишется в виде рV = RT . (7.10) От уравнения для одного моля можно перейти к уравнению для любой массы газа, приняв во внимание, что при одинаковых давлении и температуре M молей будут занимать в раз больше объем, чем один моль, в результате получим: V V M V , (7.11) где М – масса газа, – масса моля газа (молярная масса). С учетом (7.11), выражение (7.10) перепишем в виде: pV M RT . (7.12) Уравнение (7.12) называется уравнением состояния идеального газа или уравнением Менделеева – Клапейрона для произвольной массы газа. 2. Так как, согласно второму закону Авогадро, моли всех газов содержат одинаковое число молекул, равное NA = 6,021026 моль1, уравнение (7.12) можно преобразовать к новому виду. Для этого введем величину k R NA . Подставив в выражении k численные значения R и NA, получим k= 8,31 Дж/моль 23 Дж/К (постоянная Больцмана). 23 1 = 1,3810 6,023 10 моль Умножив и разделив правую часть уравнения (7.12) на NA, получим pV = NAkT . Произведение NA равно числу молекул N, содержащихся в массе газа M. С учетом этого получим 226 pV= NkT , а с учетом того, что N V n записать: число молекул в единице объема, можно p = nkT . (7.13) Уравнение (7.13) показывает, что давление идеального газа при данной температуре определяется только числом молекул в единице объема и не зависит от рода молекул. Из формулы (7.13) вытекает еще один справедливый для идеального газа закон – закон Дальтона для смеси газов. Пусть имеется смесь нескольких, не взаимодействующих друг с другом идеальных газов. Допустим, что в единичном объеме смеси содержится n1 молекул газа 1, n2 молекул газа 2 и т.д. Тогда общее число молекул в единичном объеме n = n1 + n2 + . Согласно (7.13) давление газа определяется так: p = nkT = (n1+ n2+…)kT = n1 kT + n2 kT + … = p1 + p2 + … , (7.14) где р1, р2, … – давления, которые оказывали бы газы этой смеси, если бы они заполняли объем по отдельности. Эти давления называются парциальными. В итоге закон Дальтона гласит: давление смеси идеальных газов равно сумме парциальных давлений газов, входящих в смесь, т.е. р = р1 +р2 + … . (7.15) 3. Газовые законы Бойля – Мариотта, Гей-Люссака и Шарля описывают равновесные изопроцессы в идеальном газе. Изопроцессами называются равновесные процессы, при которых один из параметров состояния не изменяется. Различают изотермический (Т = const), изобарический (p = const), изохорический (V = const) и другие процессы. Сформулируем законы для изопроцессов предполагая, что масса газа постоянна: М = const. в идеальном газе Изотермический процесс. Положив T = const, М = const, из уравнения Менделеева – Клапейрона (7.12) получим закон Бойля Мариотта: pV = const . (7.16) 227 Если масса и температура идеального газа не изменяются, то произведение давления газа на соответствующий объем есть величина постоянная. Графическое изображение изотермических процессов при двух разных температурах в координатах (p,V), (p,T) и (V,T) представлено на рис. 7.3. p p V T2 >T1 T2 T1 0 0 T1 V 0 T1 T2 T T2 T Рис. 7.3 Изобарический процесс. Положив p = const и m = const из уравнения (7.12) получим закон Гей-Люссака: V / T = const. (7.17) Если в ходе процесса давление и масса газа не изменяются, то отношение объема газа к соответствующей абсолютной температуре остается постоянным. Изобары, соответствующие двум разным давлениям, приведены на рис. 7.4. p p V р1 р2 р2 р2 > p1 р1 p1 0 0 T 0 T V Рис. 7.4 Изохорический процесс. Положив V = const и M = const, из уравнения (7.12) получим закон Шарля: 228 p p V V2 V1 V1 V2 0 V1 0 V2 T 0 T V Рис. 7.5 р / V = const . (7.18) Если в ходе процесса объем, и масса газа не изменяются, то отношение давления газа к соответствующей абсолютной температуре есть величина постоянная. Изохоры, соответствующие двум разным объемам, приведены на рис. 7.5. 7.6. Закон Максвелла распределения молекул идеального газа по скоростям и энергиям При выводе основного уравнения МКТ молекулам задавали различные скорости. В результате многократных соударений скорость каждой молекулы изменяется по модулю и направлению. Однако из-за хаотического движения молекул все направления движения являются равновероятными, т.е. в любом направлении в среднем движется одинаковое количество молекул. Согласно молекулярно-кинетической теории, как бы ни изменялись скорости молекул при столкновениях, средняя квадратичная скорость молекул газа массой М в газе, находящемся в состоянии равновесия при T = const, остается постоянной vкв 3kT M . Это объясняется тем, что в газе, находящимся в состоянии равновесия, устанавливается некоторое стационарное, не меняющееся со временем распределение молекул по скоростям, подчиняющееся вполне определенному закону. Этот закон теоретически выведен Дж. Максвеллом. Максвелл предполагал, что газ состоит из большого числа N тождественных молекул (они находятся в состоянии хаотического теплового движения при одинаковой температуре) и, что силовые поля на газ не действуют. Закон Максвелла описывается некоторой функцией f(v), называемой функцией распределения молекул по скоростям. Если разбить диапазон скоростей молекул на малые интервалы, равные dv, то на каждый интервал 229 скорости будет приходиться некоторое число молекул dN(v), имеющих скорость, заключенную в этом интервале. Функция f(v) определяет относительное число молекул dN(v)/N, скорости которых лежат в интервале от v dN v / N f vdv , до v+dv, т.е. f v dN v / Ndv . откуда Применяя методы теории вероятностей, Максвелл нашел функцию f(v) – закон для распределения молекул идеального газа по скоростям: 32 M 2 m 2 / (2 kT ) f v 4π e 0 . 2πkT (7.19) Из (7.19) видно, что конкретный вид функции зависит от рода газа (масса молекулы) и от параметра состояния (температура Т). График функции (7.19) приведен на рис. 7.6. Так как при возрастании f (v) dS = dN(v)/N vв 0 v vкв dv v Рис. 7.6 mv2 2 kT скорости v множитель e уменьшается быстрее, чем растет множитель 2 v , то функция f(v), начинаясь с нуля, достигает максимума при наиболее вероятной скорости vв и затем асимптотически стремится к нулю. Кривая несимметрична относительно vв. Относительное число молекул dN(v)/N, скорости которых лежат в интервале от v до v+dv, находится как площадь полоски на рис 7.6. Площадь, ограниченная кривой распределения и осью абсцисс, равна единице. Это означает, что функция f(v) удовлетворяет условию нормировки f (v)dv 1 . 0 Скорость, при которой функция распределения молекул идеального газа по скоростям максимальна, называется наиболее вероятной скоростью vв. 230 Значение наиболее вероятной скорости можно найти, продифференцировав выражение (7.19) (постоянные множители опускаем) по аргументу v, приравняв результат к нулю и использовав условие для максимума выражения f(v): mv2 mv 2 2 kT d 2 mv 2 2 kT e ve 2v 1 0. dv 2 kT Значения v = 0 и v = соответствуют минимумам выражения (7.19), значение v, при котором выражение в скобках становится равным нулю, и есть искомая наиболее вероятная скорость vв: vв 2kT/m Из формулы (7.20) следует, что при повышении температуры максимум функции распределения молекул по скоростям (рис 7.7) смещается вправо (значение наиболее вероятной скорости становится больше). Однако площадь, ограниченная кривой, остается неизменной, поэтому при повышении температуры кривая распределения молекул по скоростям будет растягиваться и понижаться. 2RT/M . (7.20) T1 < T2 f v Рис. 7.7 Средняя скорость молекулы v (средняя арифметическая скорость) определяется по формуле 1 v v dN (v) v f (v)dv. N 0 0 Подставляя в последнее выражение f(v) и интегрируя его, получим v 8kT/ πm 8RT/ πM . Скорости, характеризующие состояние газа (см. рис. 7. 6): 1) наиболее вероятная vв 2 RT/M ; 2) средняя v 8RT/ πM 1,13vв 3) средняя квадратичная vкв 3RT/M 1,22vв (7.21) 231 Исходя из распределения молекул по скоростям 32 m 2 mv 2 / (2 kT ) dN (v) N 4π dv , ve 2 kT (7.22) можно найти распределение молекул газа по значениям кинетической энергии . Для этого перейдем от переменной v к переменной = m v2/2. Подставив в уравнение (7.22) v 2ε m и dv 2mε -1 2 dN dε , получим 2N (kT) 3 2 ε1 2e kT dε N f ε dε , π где dN() – число молекул, имеющих кинетическую энергию поступательного движения, заключенную в интервале от до +d. Таким образом, функция распределения молекул по энергиям теплового движения 2 f (kT) 3 2 ε1 2e kT . π Средняя кинетическая энергия молекулы идеального газа 2 3 ε f dε (kT )-3 2 ε 3 2e- kT dε kT . 2 π 0 0 7.7. Опыт Штерна Первое экспериментальное определение скоростей молекул r выполнено Штерном. Его опыты позволили также оценить R распределение молекул по скоростям. б а Схема установки Штерна представлена φ на рис. 7.8. Вдоль оси внутреннего цилиндра со щелью натянута платиновая проволока, покрытая слоем серебра, которая нагревается током при Рис. 7.8 откачанном воздухе. При нагревании серебро испаряется. Атомы серебра, вылетая через щель, попадают на внутреннюю поверхность второго цилиндра, давая изображение щели. Если прибор привести во вращение вокруг общей оси цилиндров, то атомы серебра 232 осядут не против щели, а сместятся на некоторое расстояние S. Изображение щели получается размытым. Исследуя толщину осажденного слоя, можно оценить распределение молекул по скоростям, которое соответствует максвелловскому распределению. Зная радиусы цилиндров, их угловую скорость вращения, а также измеряя S, можно вычислить скорость движения атомов серебра при данной температуре проволоки. Результаты опыта показали, что средняя скорость атомов серебра близка к той, которая следует из максвелловского распределения молекул по скоростям. 7.8. Идеальный газ в однородном поле тяготения. Барометрическая формула. Распределение Больцмана При выводе закона Максвелла для распределения молекул идеального газа по скоростям мы предположили, что на молекулы газа внешние силы не действуют. Поэтому можно было считать, что молекулы равномерно распределены по объему сосуда; температура везде одинакова. На самом деле молекулы газа всегда находятся в поле тяготения Земли. Если бы не было теплового движения, то все молекулы атмосферного воздуха упали бы на Землю; если бы не было тяготения, то атмосферный воздух рассеялся бы по всей Вселенной. Тяготение и тепловое движение приводят газ в состояние, при котором его концентрация и давление убывают с высотой. Получим закон изменения давления с высотой. Пусть идеальный газ находится в равновесном состоянии в однородном поле тяготения Земли. Давление газа на высоте h обусловлено весом вышележащих слоев. Обозначим р давление на высоте h, тогда давление на высоте h + dh равно р+dp, причем если dh>0, то dp<0, так как вес вышележащих слоев атмосферы, а следовательно, и давление с высотой убывают. Разность давлений р и p+dp равна весу газа, заключенному в объеме цилиндра с площадью основания, равной единице, и высотой dh (рис. 7.9.) p – (p + dp) = gdh, p+dp dh где - плотность газа на высоте h. Отсюда dp = – gdh . (7.23) Из уравнения состояния идеального газа можно выразить плотность газа: h р Рис. 7.9 233 M pM . V RT (7.24) Подставив (7.24) в (7.23), получим приращение давления dp pgM dh . RT Полагая T = const и интегрируя приращение давления по высоте от 0 до h, получим p h dp Mg p p RT 0 dh 0 p p0 e или Mg h RT , (7.25) где р и р0 – давления газа на высотах h и h = 0. Формула (7.25) называется р0 барометрической. Из нее следует, что давление убывает с высотой по экспоненциальному закону (рис.7.10). Барометрическая формула позволяет определять высоту h с помощью барометра. Барометр, специально проградуированный, для 0 h непосредственного отсчета высоты над уровнем моря называют Рис. 7.10 альтиметром. Его широко применяют в авиации, при восхождении на горы. Преобразуя в выражении (7.25) показатель степени р получаем Mgh N A mgh mgh , RT RT kT p p0 e mgh kT , (7.26) где mgh = п – потенциальная энергия молекулы на высоте h. От барометрической формулы вида (7.26) легко перейти к закону изменения с высотой числа молекул в единице объема (концентрации молекул). Для этого воспользуемся связью давления и концентрации (7.13). р = nkT, р0 = n0kT. 234 Подставляя р и р0 в (7.26), получим n n0 e mgh kT n0 e п kT , (7.27) где n и n0 – концентрации молекул на высотах h 0 и h = 0 соответственно. Больцман показал, что распределение (7.27) справедливо не только в потенциальном поле сил земного тяготения, но и в любом потенциальном поле сил для совокупности любых одинаковых частиц, находящихся в состоянии хаотического теплового движения. Поэтому распределение (7.27) называют законом Больцмана. С одной стороны, чем выше температура, тем эффективнее действие теплового движения. В пределе Т, n n0, т.е. тепловое движение стремится разбросать частицы равномерно по всему объему. С другой стороны, под действием сил поля частицы стремятся расположиться там, где их потенциальная энергия минимальна. В пределе при Т0 (отсутствие теплового движения) n0, т.е. все частицы занимали бы состояние с минимальной (нулевой) потенциальной энергией (в случае поля тяготения Земли молекулы собирались бы на поверхности Земли). 7.9. Число столкновений и средняя длина свободного пробега молекул До сих пор мы предполагали, что молекулы газа – материальные точки, т.е. имеют исчезающее малые размеры. Это позволило не учитывать соударения между хаотически движущимися молекулами. В действительности молекулы имеют конечные размеры и непрерывно соударяются друг с другом. Между двумя последовательными столкновениями молекулы движутся прямолинейно и равномерно, проходя при этом расстояния l, называемые длинами свободных пробегов. Так как эти расстояния могут быть самыми разными, вводится понятие средней длины свободного пробега l . Чтобы найти l , будем считать, что молекулы газа представляют собой шарики некоторого диаметра d. Под d понимают то наименьшее расстояние, на которое сближаются при столкновении центры двух молекул, эффективный диаметр молекулы (рис. 7.11). Площадь круга диаметром d = d2 называется эффективным сечением молекулы. 235 d d Рис. 7.11 Средний путь, проходимый молекулой за единицу времени, численно равен v средней скорости ее движения. Если среднее число столкновений, испытываемых молекулой за единицу времени, z , то средняя длина обозначить через свободного пробега записывается в виде l d Рис. 7.12 v z . (7.28) Подсчитаем z в предположении, что молекулы упругие шарики диаметром d; все молекулы, кроме рассматриваемой нами, неподвижны. Вследствие непрерывных столкновений молекула движется по некоторой ломаной линии, при этом за единицу времени она столкнется со всеми молекулами, лежащими внутри коленчатого цилиндра диаметром 2d и длиной v (рис. 7.12). Умножив объем этого цилиндра d2 v на концентрацию молекул n, найдем z : z = d 2n v . (7.29) Если учесть, что в движении участвуют все молекулы, то число столкновений определяется средней скоростью движения молекул по отношению друг к другу (относительной скоростью), и это приводит к увеличению числа столкновений в 2 раз или z = 2 d 2n v . (7.30) Подставив (7.30) в (7.28), получим среднюю длину свободного пробега l 1 2 d 2n или при определении через эффективное сечение молекул (7.31) 236 l 1 . 2n (7.32) Так как n p kT , то формулу (7.31) можно записать в виде: l kT 2 d2p kT 2 p . (7.33) При некотором давлении средняя длина свободного пробега l может оказаться равной или даже больше линейных размеров сосуда. Такое состояние газа, при котором l больше размеров сосуда или равна им, называется вакуумом. В состоянии вакуума между молекулами газа практически отсутствуют столкновения, хотя концентрация молекул при этом весьма значительна (при р = 103 мм рт. ст. n 1019 м 3 ). 7.10. Явления переноса в газах При отсутствии равновесия в газе всегда имеется пространственная неоднородность тех или иных его параметров – плотности, давления, температуры. Если такой газ предоставить самому себе, то хаотическое движение молекул постепенно выравнивает эти неоднородности и газ приходит в состояние термодинамического равновесия. Явления выравнивания сопровождаются направленным переносом ряда физических величин: массы, импульса, энергии, электрического заряда и т. д. и поэтому называют явлениями переноса. К явлениям переноса относятся диффузия (обусловленная переносом массы), теплопроводность (обусловленная переносом энергии) и внутреннее трение или вязкость (обусловленная переносом импульса). В основе всех явлений переноса лежит один и тот же следующий механизм: беспорядочность теплового движения молекул газа, непрерывные соударения между ними приводят к постоянному перемешиванию частиц и изменению их скоростей и энергий. Если в газе существует пространственная неоднородность (градиент) плотности, температуры, или скорости упорядоченного перемещения отдельных слоев газа, то тепловое движение молекул выравнивает эти неоднородности. Таким образом, явления переноса возникают вследствие наложения хаотического движения молекул окружающей среды на упорядоченное перемещение молекул в отдельных слоях газа. Диффузия. Диффузия в газе – это процесс перемешивания молекул, сопровождающийся переносом массы из мест с большей концентрацией (плотностью) данных молекул в места с меньшей концентрацией этих 237 молекул. Таким образом, в процессе диффузии переносится масса, а изменяющейся величиной является плотность газа . Явление диффузии для химически однородного газа подчиняется закону Фика: J m D d , dx (7.34) где Jm – плотность потока массы – величина, определяемая массой вещества, диффундирующего в единицу времени через единичную площадку, перпендикулярную оси x: J m dm dS dt ; D – коэффициент диффузии; d dx градиент плотности, равный скорости изменения плотности на единицу длины х в направлении нормали к этой площадке. Знак минус показывает, что перенос массы происходит в направлении убывания плотности (поэтому знаки Jm и d dx противоположны). Коэффициент диффузии D численно равен плотности потока массы при единичном градиенте плотности. Согласно кинетической теории газов D 1 v l . 3 (7.35) Теплопроводность. Если в одной области газа средняя кинетическая энергия молекул больше, чем в другой, то с течением времени вследствие постоянных столкновений молекул происходит процесс выравнивания средних кинетических энергий молекул, т.е., иными словами, выравнивание температур. Перенос энергии в форме теплоты подчиняется закону Фурье: JE λ dT , dx (7.36) где JE – плотность теплового потока – величина, определяемая энергией, переносимой в единицу времени через единичную площадку, перпендикулярную оси x: J E dE dSdt ; коэффициент теплопроводности; dT dx градиент температуры, равный изменению температуры на единицу длины x в направлении нормали к этой площадке. Знак минус показывает, что при теплопроводности тепловая энергия переносится в направлении убывания температуры. Коэффициент 238 теплопроводности численно равен плотности теплового потока при единичном градиенте температуры. Можно показать, что 1 cV v l , 3 (7.37) где cV – удельная теплоемкость газа при постоянном объеме (количество теплоты, необходимое для нагревания 1 кг газа на 1 К при постоянном объеме); плотность газа; v средняя скорость теплового движения молекул; l средняя длина свободного пробега. Внутреннее трение (вязкость). Вязкость – это возникновение сил трения между слоями газа или жидкости, перемещающимися параллельно друг другу с различными скоростями. С точки зрения молекулярно-кинетической теории газов причиной внутреннего трения является наложение упорядоченного движения слоев газа с различными скоростями (рис. 7.13) на хаотическое тепловое движение молекул. Рассмотрим два слоя газа, движущиеся параллельно друг другу со скоростями v1 и v2, причем v1 < v2. Благодаря тепловому движению молекулы переходят из слоя 1, движущегося со скоростью v1, в слой 2, движущейся со скоростью v2, (см. рис. 7.13). При этом молекулы из слоя 1 переносят в слой 2 импульс mv1 своего упорядоченного движения. Так как v1 < v2, то молекулы из слоя 1, соударяясь с молекулами слоя 2, отбирают у них часть импульса и замедляют движение слоя 1. Наоборот, при попадании молекул из слоя 2 в слой 1 они отдают часть импульса молекулам слоя 1 и ускоряют движение этого слоя. Таким образом, со стороны слоя, движущегося быстрее, на более медленно движущийся слой действует ускоряющая сила. Наоборот, медленно перемещающийся слой тормозит более быстро движущийся слой. Силы трения, которые при этом возникают, направлены по касательной к поверхности соприкосновения слоев. Явление вязкости сопровождается переносом импульса направленного движения из более быстрых слоев в более медленные в направлении z, перпендикулярном направлению x движения слов газа. Сила внутреннего трения описывается законом Ньютона: z 2 1 v2 m m v1 x Рис. 7.13 F η dv S dx , (7.38) где коэффициент динамической 239 вязкости; dv dx градиент скорости, показывающий изменение скорости в направлении x, перпендикулярном направлению движения слоев; S – площадь, на которую действует сила F. Взаимодействие двух слоев согласно второму закону Ньютона можно рассматривать как процесс, при котором от одного слоя к другому в единицу времени передается импульс, по модулю равный действующей силе. Тогда выражение (7.38) можно представить в виде J p dv , dx (7.39) где Jp – плотность потока импульса – величина, определяемая полным импульсом, переносимым в единицу времени в положительном направлении оси x через единичную площадку, перпендикулярную этой оси: Jp mv dS dt . Знак минус указывает, что импульс переносится в направлении убывания скорости, dv dx градиент скорости. Динамическая вязкость численно равна плотности потока импульса при единичном градиенте скорости. Она вычисляется по формуле 1 vl 3 . (7.40) Из сопоставления формул (7.34), (7.36) и (7.39), описывающих явления переноса, следует, что закономерности всех явлений переноса сходны между собой. Формулы (7.35), (7.37) и (7.40) связывают коэффициенты переноса и характеристики теплового движения молекул. Из этих формул вытекают простые зависимости между , D и : = D , / ( cV ) = 1. Используя эти формулы, можно по найденным из опыта одним величинам определить другие. 240 7.11. Реальные газы При описании свойств газов мы считали их идеальными, когда средние расстояния между молекулами газа достаточно велики, т.е. моделью идеального газа являются невзаимодействующие друг с другом шарики, которые движутся хаотически и объемом которых можно пренебречь. В этом случае можно не учитывать потенциальную энергию взаимодействия по сравнению с кинетической энергией молекул. C увеличением давления и понижением температуры средние расстояния между молекулами уменьшаются и средняя кинетическая энергия молекул становится сравнимой с потенциальной энергией взаимодействия. Поведение реального газа все больше отличается от поведения идеального газа. Так, радиус молекул большинства газов порядка 10-10 м (1Ǻ), следовательно, объем молекул порядка 41030 м3. В 1 м3 газа при нормальных условиях содержится 2,71025 молекул. Таким образом, собственный объем молекул в 1 м3 при нормальных условиях будет порядка 1,2 104 м3, т.е. около 0,0001 от объема, занятого газом. При увеличении давления до 5000 атм объем газа по закону Бойля Мариотта уменьшится в 5000 раз, т.е. то же число молекул должно двигаться в объеме 2104 м3. Следовательно, собственный объем молекул занимает 0,5 объема сосуда. Ясно, что в таких условиях пренебрегать размерами молекул нельзя. Кроме того, нельзя при этом не учитывать силы взаимодействия между молекулами, так как они теперь находятся друг от друга на сравнительно близких расстояниях. Очевидно, следует перейти от схемы идеального газа к реальным газам. Для получения уравнения, более точно описывающего поведение реальных газов, необходимо основываться на более близкой к реальному газу модели. Из большого числа уравнений, предложенных для описания поведения реальных газов, самым простым и вместе с тем дающим достаточно хорошие результаты оказалось уравнение голландского физика Ван-дер-Ваальса (1873 г.). 7.12. Уравнение Ван-дер-Ваальса Для получения уравнения Ван-дер-Ваальс воспользовался следующей моделью: молекулы газа представляют собой абсолютно упругие шарики конечного размера, между которыми существуют силы взаимного притяжения. В соответствии с этой новой моделью Ван-дер-Ваальс предложил внести две поправки в уравнение Менделеева – Клапейрона: рV = RT, где V – объем одного киломоля газа. Учет собственного объема молекул. Первая поправка Ван-дер-Ваальса b – поправка на так называемый недоступный объем. Если обозначить объем 241 несжимаемой части 1 кмоля газа через b, то уравнение состояния газа должно принять следующий вид: р (V – b) = RT. (7.40) При р объем газа стремится к b, а не к 0, как это следует из уравнения (7.10). На первый взгляд может показаться, что объем b равен просто сумме объемов всех молекул. Но это не так. Следует принять во внимание, что при сжатии газа уменьшается не весь объем, а лишь разность между объемами газа и его несжимаемой части. Ближайшее расстояние между центрами двух столкнувшихся шаров равно их удвоенному радиусу (рис. 7.14). Тогда для центра каждой из этих двух молекул (а вероятность одновременного столкновения трех и более молекул ничтожно мала, и ею можно пренебречь) недоступным является объем шара радиусом 2r. Следовательно, недоступный объем, приходящийся на 2r каждую пару молекул, равен 4 4 4 π (2r )3 8 π r 3 , где π r 3 объем одной 3 3 3 Рис.7.14 молекулы. Это значит, что недоступный объем, приходящийся на каждую молекулу, равен 4 4 π r 3 , т.е. учетверенному собственному объему. А недоступный объем, 3 приходящийся на все NA молекул 1-го киломоля, b = 4 4 r3 NA, 3 т.е. учетверенному объему всех молекул. Если, например, в сосуде находятся две молекулы, то центр любой из них не может приблизиться на расстояние, меньше диаметра d = 2r молекулы. Это означает, что для центров обеих молекул оказывается недоступным сферический объем радиуса d = 2r, т.е. объем, равный восьми объемам молекулы, а в расчете на одну молекулу – учетверенный объем молекулы. Учет силы межмолекулярного взаимодействия. Действие сил притяжения газа приводит к появлению дополнительного давления на газ, называемого внутренним давлением. По вычислениям Ван-дер-Ваальса внутреннее давление обратно пропорционально квадрату молярного объема, т.е. 242 p a V2 , (7.42) где а – постоянная Ван-дер-Ваальса, характеризующая силы межмолекулярного притяжения, V – молярный объем. Вводя эти поправки, получим уравнение Ван-дер-Ваальса для моля газа (уравнение состояния реальных газов): p a V V 2 μ b RT . (7.43) Для произвольного количества вещества с учетом того, что V M V V , уравнение (7.43) примет вид 2a V p 2 b V или 2 a p 2 V b RT , V (7.44) где поправки а и b – постоянные для каждого газа величины, определяемые опытным путем. Исходя из уравнения (7.44), можно построить изотермы. Так как уравнение Ван-дер-Ваальса представляет собой уравнение третьей степени относительно объема V, то оно дает одно или три вещественных значения V в зависимости от p и T. Графически теоретические изотермы Ван-дер-Ваальса представлены на рис. 7.15, где зависимость p от V дана для различных температур. 243 р T1<T2<T3<Tк… р в0 газ к рк пар + жидкость к жидкость с с f р1 b e b d Vк Рис. 7. 15 Т6 Т5 Тк Т3 Т2 Т1 V пар в в а а р1 V1 V2 Тк в V Рис. 7. 16 Из рисунка видно, что действительно какому-либо значению р1 соответствуют три значения V. При высоких температурах эти изотермы имеют форму, близкую к гиперболе рV = const и описывают газообразное состояние вещества (почти идеальный газ). По мере уменьшения температуры форма изотермы изменяется, и при некоторой температуре Тк она обнаруживает точку перегиба (к). При еще меньших температурах изотермы приобретают сложную форму и могут заходить даже в область отрицательных давлений (см. рис. 7.15). Как понять столь странное поведение газа? Ответ на этот вопрос дают экспериментальные изотермы, полученные Эндрюсом для углекислоты. В толстостенном сосуде сжимался один киломоль СО2, давление измерялось манометром, температура поддерживалась постоянной. Полученные им изотермы представлены на рис. 7.16. На этих изотермах вместо горбов, характерных для теоретических изотерм Ван-дер-Ваальса, получаются прямолинейные горизонтальные участки (аа, вв, сс и т.д.), постепенно уменьшающиеся с увеличением температуры и на кривой (Тк = const) вырождающиеся в точку перегиба кривой (точку к). Что же происходит с газом? При малых давлениях, соответствующих ветви вв, газ сжимается аналогично идеальному, обнаруживая, правда, несколько большую сжимаемость. Но, когда давление газа достигает значения р1 при объеме V2, в дальнейшем оно остается неизменным до объема V1. На этом участке газ превращается в жидкость. Конденсация газа продолжается до тех пор, пока вся масса газа в сосуде не превратится в жидкость (точка в). При 244 дальнейшем уменьшении объема происходит сжатие жидкости. Очень крутой подъем ветви вв0 свидетельствует о малой сжимаемости жидкости. Сокращение горизонтальных участков с повышением температуры означает, что жидкое состояние все меньше отличается от газообразного и в точке перегиба (к) различие между этими состояниями вещества исчезает. Таким образом, состояние вещества, характеризуемое точкой к, с одинаковым правом можно назвать как газом, так и жидкостью. Поэтому такое состояние называют критическим, а температуру, при котором оно наступает, критической температурой Тк. Критическая температура Тк на рис. 7.15. характеризуется точкой, которой соответствует критический объем Vк и критическое давление рк. Уравнение Ван-дер-Ваальса является относительно объема алгебраическим уравнением третьей степени. В самом деле, уравнение (7.43) можно привести к виду RT a ab Vμ3 b Vμ2 Vμ 0. p p p (7.45) При фиксированных значениях давления и температуры оно имеет три корня относительно V (V1, V2, V3) или (V V1 ) (V V2 ) (V V3 ) = 0. В критическом состоянии все три корня совпадают: V1 = V2 = V3 = Vк, т.е. (V -Vк)3 = 0 . (7.46) 3 2 Раскрывая уравнение (7.46) и сравнивая коэффициенты при Vμ , Vμ , и V , получаем для критического состояния (p = pк , Т = Тк): Tк 8a , 27bR Vк = 3b, pк = a . 27b 2 (7.47) Если на различных изотермах соединить все точки, при которых начинается процесс кипения, и точки, при которых начинается процесс конденсации, то получится некоторая область, очерченная пунктиром на рис. 7.16. Эта пунктирная куполообразная линия разделяет pV диаграмму на три области: 1 правая часть от очерченной области соответствует газу – газ (Г), здесь вещество находится в одной газообразной фазе; 2 слева – жидкость (Ж), однофазное состояние; 245 3 внутри очерченной области – двухфазная система жидкость + пар (Ж+П). Выше изотермы, которая соответствует температуре Тк, однофазная область – газ (Г). При температурах выше критической нет прямолинейных горизонтальных отрезков на изотермах. Следовательно, при этих температурах, ни при каких давлениях сжижать газ нельзя. Отсюда вытекает условие сжижения газов: для превращения газа в жидкость необходимо сжимать газ при температурах ниже критической. Сопоставление изотерм Ван-дер-Ваальса с опытными изотермами показывает, что изотермы Ван-дер-Ваальса в отличие от изотерм Бойля – Мариотта охватывают не только область газообразного состояния вещества, но и области двухфазного и жидкого состояний. При этом в области малых давлений и больших объемов наблюдается совпадение изотерм, что понятно, так как при этих условиях газ можно считать идеальным. Жидкому состоянию соответствуют круто уходящие вверх левые участки изотерм Ван-дер-Ваальса. Однако в этой области имеется лишь качественное согласие с результатами экспериментов. Волнообразные участки (вdefв ) изотерм Ван-дер-Ваальса (см. рис. 7.15), относящиеся к двухфазному состоянию вещества, сильно отличается от соответствующих горизонтальных участков экспериментальных изотерм (пунктирные прямые вв ). Однако опыты показывают, что некоторые состояния, соответствующие участкам вdefв изотерм Ван-дер-Ваальса, практически осуществимы. Например, можно задержать кипение жидкости, тщательно удалив из нее примеси и производя нагревание в сосуде с гладкими стенками. При этом получают перегретую жидкость, различным состояниям которой соответствуют точки кривой вd. Аналогично при медленном изотермическом сжатии газа, не содержащего пылинок, ионов и других центров конденсации, можно получить пересыщенный пар, соответствующий участку изотермы вf. При введении в пересыщенный пар пылинок или ионов происходит быстрая конденсация пара. Это явление используют в камере Вильсона для наблюдения траектории движения заряженных частиц. Участок изотермы def практически не осуществим. 7.13. Внутренняя энергия реального газа. Эффект Джоуля – Томсона Внутренняя энергия реального газа должна состоять из двух частей: 1) кинетической энергии поступательного и вращательного движений Ек , 2) потенциальной энергии их взаимодействия Еп , U =Ек + Еп . (7.48) 246 Предполагая, что для реального газа тоже применима теорема о равномерном распределении энергии по степеням свободы, можно для расчета Ек воспользоваться формулой, полученной для идеального газа: Eк M 1 M RT CV T . 2 (7.49) Выражение для потенциальной энергии взаимодействия молекул найдем следующим образом. При расширении газа от объема V1 до V2 силы внутреннего или молекулярного давления р (см. формулу (7.42)) совершают работу: V A 2 V1 pdV v2 V1 a a a d V ( ). V2 V V1 2 Так как работа внутренних сил равна изменению потенциальной энергии системы, то можно считать, что a Vμ есть искомое выражение для потенциальной энергии одного киломоля газа. Эта энергия имеет отрицательный знак, так как молекулярные силы, создающие внутреннее давление р, являются силами притяжения. Для любого количества газа потенциальная энергия взаимодействия молекул имеет вид Eп M a . μ V (7.50) Окончательно, внутренняя энергия реального газа U M a (CV T ) . μ V (7.51) Экспериментальным доказательством наличия в газе межмолекулярных сил является опыт, проведенный Джоулем и Томсоном. В их приборе газ пропускался по теплоизолированной от внешней среды трубке с пористой перегородкой (схема опыта представлена на рис. 7.17). Давления исследуемого газа слева и справа от перегородке поддерживались постоянными и равными р1 и р2, причем р1 > р2. Температура газа измерялась термометрами а и б . Под действием перепада давлений p = p1 – p2 происходит адиабатическое протекание газа из левой части трубки в правую. Опыты показали, что при адиабатическом продавливании газа через пористую перегородку температура газа изменяется (эффект Джоуля – Томсона). При этом возможно несколько случаев: 247 а с б р2 р1 Рис. 7.17 1) газы, расширяясь, охлаждаются (положительный эффект Джоуля – Томсона); 2) газы, расширяясь, нагреваются (отрицательный эффект Джоуля – Томсона); 3) температура газа при его расширении не изменяется (инверсия). Качественно эффект Джоуля – Томсона объясняется наличием двух слагаемых в выражении внутренней энергии (7.51). Если газ расширяется адиабатически без совершения внешней работы, то его внутренняя энергия остается постоянной, т.е. U = Eк + Eп = const. Поэтому у газа с преобладанием сил притяжения между молекулами расширение сопровождается увеличением результирующей силы взаимодействия между молекулами и, следовательно, увеличением их потенциальной энергии и соответственно уменьшением кинетической. Но кинетическая энергия пропорциональна температуре. Таким образом, уменьшение Ек сопровождается уменьшением Т – газ охлаждается. При расширении газов с преобладанием сил отталкивания между молекулами, наоборот, уменьшается Еп и увеличивается Ек и температура Т. В этом случае газ при расширении нагревается. Очевидно, что температура инверсии соответствует равновесию между силами притяжения и отталкивания молекул газа. 7.14. Элементы механики жидкостей. Давление в жидкости и газе Молекулы газа вследствие беспорядочного и хаотического движения не связаны или слабо связаны силами взаимодействия, поэтому они движутся свободно, в результате соударений стремятся разлететься во все стороны, 248 заполняя весь предоставленный им объем, т.е. объем газа определяется объемом того сосуда, который газ занимает. Жидкость, как и газ, принимает форму сосуда, в которой она находится. Но в жидкост, в отличие от газа, среднее расстояние между молекулами остается постоянным, поэтому она обладает неизменным объемом. Хотя свойства жидкостей и газов во многом отличаются, в ряде механических явлений их поведение определяется одинаковыми параметрами и идентичными уравнениями. Поэтому гидроаэромеханика – раздел механики, изучающий равновесие и движение жидкостей и газов, их взаимодействие между собой и обтекаемыми ими твердыми телами, использует единый подход к изучению жидкостей и газов. В механике жидкости и газы рассматриваются как сплошные, непрерывно распределенные в занятой ими части пространства. Плотность жидкости мало зависит от давления. Плотность же газов от давления зависит существенно. Из опыта известно, что сжимаемостью жидкости и газа во многих задачах можно пренебречь и пользоваться единым понятием несжимаемой жидкости, т.е. жидкости, плотность которой всюду одинакова и не изменяется со временем. Если в покоящуюся жидкость поместить тонкую пластинку, то части жидкости, находящиеся по разные стороны от нее, будут действовать на каждый ее элемент S с силами F. Эти силы не зависимо от того, как пластинка ориентирована, будут равны по модулю и направлены перпендикулярно S, так как наличие касательных сил привело бы частицы жидкости в движение. Физическая величина, определяемая нормальной силой, действующей со стороны жидкости на единицу площади, называется давлением жидкости р: p F S . Единица измерения давления паскаль (Па): 1 Па равен давлению, создаваемому силой 1 Н, равномерно распределенной по нормальной к поверхности площади 1 м2, 1 Па = 1 Н/м2. Давление при равновесии жидкостей (газов) подчиняется закону Паскаля: давление в любом месте покоящейся жидкости одинаково по всем направлениям, причем давление одинаково передается по всему объему, занятому данной жидкостью. Рассмотрим влияние веса жидкости на распределение давления внутри несжимаемой жидкости, находящейся в состояние покоя. При равновесии жидкости давление по горизонтали всегда одинаково, иначе не было бы равновесия. Поэтому свободная поверхность жидкости в состояние покоя всегда горизонтальна вдали от стенок сосуда. Если жидкость несжимаема, то ее плотность не зависит от давления. Тогда при поперечном сечении S столба жидкости, его высоте h и плотности вес жидкости Р = g S h, а давление на нижнее основание 249 p P gSh gh , S S (7.52) т.е. давление изменяется линейно с высотой. Давление gh называется гидростатическим. Согласно формуле (7.52) сила давления на нижние слои будет больше, чем на верхние, поэтому на тело, погруженное в жидкость (газ), действует выталкивающая сила, определяемая законом Архимеда: на тело, погруженное в жидкость (газ), действует со стороны этой жидкости (газа) направленная вверх выталкивающая сила, равная весу вытесненной телом жидкости (газа). FA = gV , (7.53) где плотность жидкости; V – объем погруженного в жидкость тела. 7.15. Уравнение Бернулли Прежде чем рассмотреть уравнение Бернулли, введем несколько определений и понятий. Воображаемая жидкость, в которой отсутствуют силы внутреннего l1 l2 S1 S1 v2 p1 S2 S2 v1 p2 h1 h2 Рис. 7.18 трения, называется идеальной. Линиями тока называются такие линии касательные, к которым совпадают с вектором скорости жидкости в соответствующих точках пространства. Часть жидкости, ограниченная линиями тока, называется трубкой тока. 250 Выделим в стационарно текущей идеальной жидкости трубку тока, ограниченную сечениями S1 и S2 по которой слева направо течет жидкость (рис. 7.18). Пусть в месте сечения S1 скорость течения равна v1 , давление р1 и высота, на которой это сечение расположено, h1. Аналогично, в месте сечения S2 скорость течения v2, давление р2 и высота сечения h2. За малый промежуток времени t жидкость перемещается от сечений S1 и S2 к сечениям S1 и S 2 . Согласно закону сохранения энергии, изменение полной энергии Е2 – Е1 идеальной несжимаемой жидкости должно быть равно работе А внешних сил по перемещению массы m жидкости: Е2 – Е1 = А , (7.54) где Е1 и Е2 – полные энергии жидкости массой m в местах сечений S1 и S2 соответственно. С другой стороны, А – это работа, совершаемая при перемещении всей жидкости, заключенной между сечениями S1 и S2, за рассматриваемый малый промежуток времени t. Для перенесения массы m от S1 до S1 жидкость должна переместиться на расстояние l1 = v1t и от S2 до S 2 на расстояние l2 = v2t. Отметим, что l1 и l2 настолько малы, что всем точкам объемов, закрашенным на рис. 7.18, приписывают постоянные значения скорости v, давления р и высоты h. Следовательно, А = F1 l1 + F2 l2 , (7.55) где F1 = p1S1 и F2 = p2S2 (отрицательна, так как направлена в сторону, противоположную течению жидкости, см. рис. 7.18). Полные энергии Е1 и Е2 складываются из кинетической и потенциальной энергий массы m жидкости: mv12 E1 mgh1 , 2 (7.56) mv22 E2 mgh2 . 2 (7.57) Подставляя (7.56) и (7.57) в (7.54) и приравнивая (7.54) и (7.55), получим mv12 mv22 mgh1 + р1S1v1t = mgh2 + р2S2v2t 2 2 (7.58) Объем несжимаемой жидкости остается постоянным, т.е. V = S1v1t = S2v2t. Разделив (7.58) на V, получим 251 ρv12 ρv22 ρgh1 p1 ρgh2 p2 , 2 2 где плотность жидкости. Но так как сечения выбирались произвольно, то можем записать ρv 2 ρgh p const . 2 (7.59) Выражение (7.59) называется уравнением Бернулли, и оно является выражением закона сохранения энергии применительно к установившемуся течению идеальной жидкости. Уравнение Бернулли хорошо выполняется и для реальных жидкостей, внутреннее трение которых не очень велико. Величина р в формуле (7.59) называется статическим давлением 2 (давление жидкости на поверхности обтекаемого ею тела), v 2 динамическим давлением, gh – гидростатическим давлением. Для горизонтальной трубки тока (h1 = h2) выражение (7.59) принимает вид ρv 2 p const , 2 v 2 2 p называется полным где давлением. 7.16. Движение тел в жидкостях и газах (7.60) Ry R Rx При движении тела в жидкости или газе на него действуют силы, Рис. 7.19 равнодействующую которых мы обозначим буквой R (рис.7.19). Силу R можно разложить на две составляющие, одна из которых Rx направлена в сторону, противоположную движению тела (или в сторону движения потока, набегающего на тело), а вторая Ry перпендикулярна этому направлению. Составляющие Rx и Ry называются соответственно лобовым сопротивлением и подъемной силой. Если тело симметрично и его ось симметрии совпадает с направлением скорости, то на него действует только лобовое сопротивление, подъемная же сила в этом случае равна нулю. Если рассмотреть движение цилиндра в такой жидкости (рис. 7.20), то картина линий тока симметрична как относительно прямой, проходящий через точки А и В, так и относительно прямой, 252 проходящей через точки С и D, т.е. результирующая сила давления на поверхность цилиндра будет равна нулю. Иначе обстоит дело при движении тел в вязкой жидкости. Вследствие вязкости среды в области, прилегающей к поверхности тела, образуется пограничный слой частиц, движущихся с меньшими скоростями. В результате тормозящего действия этого слоя возникает вращение частиц, и движение жидкости в пограничном слое становится вихревым. Если тело не имеет обтеC каемой формы, то пограничный слой B A жидкости отрывается от поверхности тела. За телом возникает течение D жидкости (газа), направленное противоположно набегающему потоку. Оторвавшийся пограничный слой, следуя за этим течением, образует вихри, Рис. 7.20 вращающиеся в противоположные стороны (рис. 7.21). Лобовое сопротивление зависит от формы тела и его положения относительно потока, что учитывается безразмерным коэффициентом сопротивления Сх, определяемым экспериментально. ρv 2 Rx Cx S, 2 Рис. 7.21 (7.61) где – плотность среды; v – скорость движения тела; S – наибольшее поперечное сечение тела. Составляющую Rх можно значительно уменьшить, подобрав тело такой формы, которая не способствует образованию завихрения. Подъемная сила может быть определена формулой, аналогичной (7.59): ρv 2 Ry C y S, 2 где Сy – безразмерный коэффициент подъемной силы. 253 Для крыла самолета требуется большая подъемная сила при малом лобовом сопротивлении. Это условие выполняется при малых углах атаки (угол к потоку). ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ 1. В чем состоит статистический метод изучения свойств макроскопических систем? 2. В чем состоит термодинамический метод изучения свойств макроскопических систем? 3. Сформулируйте основные положения молекулярно-кинетической теории и приведите опытные доказательства, подтверждающие справедливость этих положений. 4. В каких агрегатных состояниях и при каких условиях может существовать любое вещество? 5. Какое состояние вещества называется газообразным? 6. Какой газ называется идеальным? 7. Сколько параметров характеризует состояние данной массы газа? Какие именно? 8. Что называется давлением? В каких единицах измеряется давление в системе СИ? 9. Что называется объемом? 10. Что называется температурой газа? Как вводится абсолютная температура? 11. Как вводится понятие абсолютного нуля? 12. Запишите математически и сформулируйте основное уравнение молекулярно-кинетической теории. 13. Сформулируйте законы Авогадро. 14. Что такое число Авогадро? 15. Как, зная число Авогадро, найти массу молекулы и атома какого-либо вещества? 16. Запишите уравнение Менделеева - Клапейрона. 17. Что означает отношение M μ ? 18. Какая величина называется универсальной газовой постоянной, постоянной Больцмана? 19. Запишите зависимость давления от концентрации газа. 20. Сформулировать закон Дальтона для смеси газов. 21. Какой процесс называется изохорическим, изобарическим, изотермическим? 22. Какому закону подчиняются изохорический, изобарический изотермический процессы? Сформулируйте эти законы. 23. Как графически изображаются в координатах (p,V), (p,T), (V,T), (p, t) и (v, t) изохорический, изобарический изотермический процессы? Здесь Т – абсолютная температура, t – температура по шкале Цельсия. 254 24. Изобразите графически распределение молекул по скоростям (закон Максвелла). Дайте пояснения. 25. Чему равна площадь под кривой распределения молекул по скоростям? 26. Какая скорость называется средней квадратичной, наиболее вероятной? Какими формулами выражаются эти скорости? 27. Как изменится кривая распределения молекул по скоростям, если температура газа увеличится, уменьшится? 28. В чем состоит опыт Штерна? 29. Что отражает барометрическая формула? 30. Как изменяется концентрация молекул с высотой в поле тяготения? 31. Изобразите графически зависимость концентрации молекул от высоты в поле тяготения. 32. Как изменяется концентрация молекул в поле тяготения при повышении температуры, при Т при понижении температуры, при Т0? Поясните результаты. 33. Что называется средней длиной свободного пробега молекулы? 34. Что понимают под эффективным диаметром молекулы? 35. Приведите формулу для расчета средней длины свободного пробега молекулы. Дайте пояснения. 36. Какие явления называются явлениями переноса? Какова их природа? 37. Дайте понятие градиента физической величины. Приведите примеры. 38. Запишите общее уравнение явлений переноса. Дайте пояснения. 39. В чем состоит явление диффузии? Привести примеры. 40. Запишите уравнение Фика для диффузии. Дайте пояснения. 41. Каково физическое содержание коэффициента диффузии и его размерность? 42. В чем состоит явление теплопроводности? Приведите примеры. 43. Запишите уравнение Фурье для теплопроводности. Дайте пояснения. 44. Каково физическое содержание коэффициента теплопроводности и какова его размерность? 45. В чем состоит явление вязкости (внутреннего трения)? Привести примеры. 46. Запишите уравнение внутреннего трения. Дайте пояснения. 47. Каково физическое содержание коэффициента вязкости и его размерность? 48. В чем состоит отличие реальных газов от идеальных? 49. Для чего введены Ван-дер-Ваальсом первая и вторая поправки к уравнению Бойля – Мариотта? 50. Что характеризуют и чему равны первая и вторая поправки Ван-дерВаальса? 51. Написать уравнение Ван-дер-Ваальса для одного кило моля и для любого количества вещества. 52. Как выглядит изотерма Ван-дер-Ваальса? В чем ее отличие от изотермы Бойля – Мариотта? 255 53. Как выглядит изотерма Ван-дер-Ваальса при Т=Тк (критической температуре)? 54. Какая температура называется критической? 55. Каковы условия сжижения газов? 56. Изобразите опытные изотермы реальных газов. В чем их отличие от изотерм Ван-дер-Ваальса? 57. Опишите состояние вещества на различных участках опытных изотерм. 58. Чем отличаются опытные изотермы от изотерм Бойля – Мариотта? Дайте пояснения. 59. Чем объясняются волнообразные участки на изотермах Ван-дерВаальса? Можно ли получить на практике состояния, соответствующие этим участкам кривых? 60. Из чего состоит внутренняя энергия реального газа? 61. Напишите формулу для расчета внутренней энергии реального газа. 62. В чем состоит эффект Джоуля – Томсона, что он отражает? 63. Что отражает положительный и отрицательный эффекты Джоуля – Томсона? 64. Сформулируйте и поясните законы Паскаля и Архимеда. 65. Что называют линией тока, трубкой тока? 66. Что характерно для установившегося течения жидкости? 67. Какой закон выражает уравнение Бернулли для идеальной жидкости? 68. Как в потоке жидкости измерить статическое давление, динамическое давление, полное давление? 69. Каковы причины возникновения лобового сопротивления тела, движущегося в жидкости, может ли оно быть равным нулю? 70. Как объяснить возникновение подъемной силы? 8. ТЕРМОДИНАМИКА Термодинамика – это наука, которая изучает вопросы, связанные с образованием работы и тепловой энергии. Однако законы, лежащие в основе термодинамики, имеют настолько общий характер, что в настоящее время термодинамические методы с большим успехом применяются для исследования многочисленных физических и химических процессов и для изучения свойств вещества и излучения. При изучении свойств и процессов превращения вещества термодинамика не вдается в рассмотрение микроскопической картины явлений. В основе термодинамики лежат общие принципы, или, как их называют, начала, являющиеся обобщением опытных данных. Объектом исследование термодинамики является термодинамическая система. Термодинамической системой называется совокупность тел, обменивающихся энергией как между собой, так и с внешними телами. Примером термодинамической системы может служить газ, заключенный в цилиндр под поршнем. Если внешние условия неизменны, то термодинамичес- 256 кая система, оказавшаяся в этих условиях, приходит через некоторое время в состояние, при котором в ней прекращаются всякие макроскопические изменения. Такое состояние называется термодинамическим равновесием. При термодинамическом равновесии состояние системы в целом описывается тремя параметрами: давлением, объемом и температурой, связанными между собой уравнением состояния системы. 8.1. Внутренняя энергия, работа и теплота Энергия – это количественная мера движения материи. Каждому виду движения материи соответствует свой вид энергии. Всякая термодинамическая система в любом состоянии обладает некоторой энергией: кинетической энергией системы как целого, потенциальной энергией во внешнем поле сил и внутренней энергией. В термодинамике обычно рассчитывают макроскопически неподвижные системы, не подверженные действию внешних полей. Для таких систем значения полной и внутренней энергии совпадают. Поэтому понятие внутренней энергии является одним из основных в термодинамике. Внутренняя энергия системы U равна сумме всех видов энергий движения и взаимодействия частиц, составляющих данную систему. Например, внутренняя энергия газообразной системы включает в себя: кинетическую энергию поступательного и вращательного движения молекул; кинетическую энергию колебательного движения атомов в молекуле; потенциальную энергию взаимодействия молекул и атомов внутри молекулы; энергию электронных оболочек атомов; энергию движения и взаимодействия нуклонов в ядрах атомов. Внутренняя энергия – однозначная функция состояния системы, ее значение не зависит от того, каким образом система пришла в данное состояние, т.е. не зависит от вида процесса перехода. Подобно потенциальной энергии в механике внутренняя энергия может быть количественно определена только с точностью до постоянного слагаемого U0, зависящего от выбора «начала отсчета» внутренней энергии, т.е. от выбора состояния, в котором внутреннюю энергию системы принимают равной нулю. Однако значение U0 несущественно, так как в термодинамических расчетах приходится определять не абсолютное значение U, а не зависящее от U0 изменение этой энергии U в различных термодинамических процессах. По той же причине под внутренней энергией обычно понимают те ее составляющие, которые изменяются в рассматриваемых процессах. Так, например, в дальнейшем мы будем касаться процессов, не сопровождающихся изменением электронных оболочек атомов и внутриядерной энергии. 257 Под внутренней энергией газа будем понимать энергию теплового движения (поступательного и вращательного) молекул и потенциальную энергию их взаимодействия. В случае идеального газа нет сил межмолекулярного взаимодействия и внутренняя энергия равна сумме энергий беспорядочного (теплового) движения всех молекул. Обмен энергией между термодинамической системой и окружающими ее телами может протекать в двух эквивалентных формах: макроскопической – в форме работы и микроскопической – в форме теплообмена. Работа А – это количественная мера изменения энергии термодинамической системы при ее переходе из одного состояния в другое. Совершение работы сопровождается перемещением внешних тел, воздействующих на систему. Например, при перемещении поршня, закрывающего заключенный в сосуде газ, совершается работа A . По третьему закону Ньютона газ при этом совершает над поршнем работу A A . Таким образом, работа представляет собой процесс передачи энергии упорядоченного движения. Совершение работы над системой приводит к увеличению ее внутренней энергии. Теплота Q – это тоже количественная мера изменения энергии термодинамической системы при переходе ее из одного состояния в другое. Однако теплообмен представляет собой процесс, не связанный с макроскопическим перемещением взаимодействующих тел. Этот процесс передачи энергии неупорядоченного движения от одних тел к другим осуществляется за счет обмена энергией непосредственно между хаотически движущимися частицами тел. Например, при соприкосновении «холодного» и «горячего» газов молекулы нагретого газа при случайных столкновениях передают энергию молекулам холодного газа. Иногда теплопередача осуществляется путем обмена электромагнитным излучением. Например, вода в море прогревается днем за счет излучения, посылаемого Солнцем. В реальных условиях оба способа передачи энергии термодинамической системе (в форме работы и теплоты) сопутствуют друг другу. Например, при нагревании тела расширяются и совершают работу над внешними телами. Количество тепла, как и работа, функции процесса. Поэтому говорить о «запасе тепла» или о «запасе работы» в системе бессмысленно. Все три величины – энергия, работа и теплота в системе СИ измеряются в джоулях (Дж). 8.2. Внутренняя энергия идеального газа. Степени свободы системы Для того чтобы подсчитать внутреннюю энергию идеального газа, необходимо выяснить ее зависимость от структуры молекулы газа и распределения ее между частицами газа. Для этого воспользуемся статистическим методом, определяющим распределение энергии по степеням свободы. 258 Числом степеней свободы i материального объекта называется число независимых координат, однозначно определяющих положение этого объекта относительно рассматриваемой системы отсчета. Положение материальной точки в пространстве определяется тремя координатами: x, y и z (рис. 8.1). Следовательно, материальная точка обладает тремя степенями свободы. Изменению координат x, y, z соответствует поступательное движение материальной точки. Молекулы одноатомного газа можно рассматривать как материальные точки, так как масса каждой молекулы сосредоточена в ядре, размеры которого очень малы. Поэтому молекула одноатомного газа имеет три степени свободы поступательного движения (i = 3). Молекулы, состоящие из двух, трех и большего числа атомов, не могут быть уподоблены материальным точкам. Молекулы двухатомного газа в первом приближении представляют собой два жестко связанных атома, находящиеся на некотором расстоянии друг от друга (рис. 8.2). Такая молекула, напоминающая гантель, помимо трех степеней свободы поступательного движения имеет еще две степени свободы вращательного движения вокруг осей О1О1 и О2О2. Вращение вокруг третьей оси ОО рассматривать не нужно, так как момент инерции молекулы относительно этой оси ничтожно мал. Таким образом, молекула двухатомного газа обладает пятью О2 z О1 z О О z О 0 О1 y О0 x x x y Рис. 8.1 степенями свободы (i = 5). О2 y Рис. 8.2 259 Молекулы, состоящие из трех и О1 более атомов (рис. 8.3), имеют, подобно О2 z абсолютно твердому телу, 3 степени свободы поступательного движения и 3 степени свободы вращательного двиО О жения (i = 6). Одним из важнейших законов О2 статистической физики является закон равномерного распределения энергии х О1 по степеням свободы: энергия молекулы равномерно распределяется по стеy пеням свободы, то есть на каждую стеРис. 8.3 пень свободы, независимо от конструкции молекулы, приходится одинаковая энергия, равная kT/2. Докажем этот закон приближенно для идеального газа. На основании уравнения Клаузиуса 2 m vкв pV n 3 2 2 и уравнения Менделеева – Клапейрона pV M RT находим среднюю кинетическую энергию одной молекулы идеального газа: 2 m vкв n 3 2 2 M RT , где n MN A концентрация молекул; k R N A постоянная Больцмана, 2M M N A Eк RT или 3 Eк 2 kT . 3 (8.1) Уравнение Клаузиуса было получено в предположении, что молекулы газа – материальные точки (одноатомные молекулы). Следовательно, они имеют 3 степени свободы поступательного движения. Так как молекулы движутся хаотически и все направления движения равновероятны, полная энергия молекулы (8.1) поровну распределяется между тремя степенями свободы и на каждую степень свободы приходится kT/2 энергии 260 Ei 1 1 Eк kT . 3 2 (8.2) Этот закон хорошо согласуется с экспериментом при температурах, близких к комнатным. Пользуясь законом равномерного распределения энергии по степеням свободы, можно подсчитать энергию одной молекулы для любой массы идеального газа. Так, для одной молекулы средняя кинетическая энергия хаотического теплового движения i Em kT . (8.3) 2 Молекулы идеального газа не взаимодействуют друг с другом. Поэтому его внутренняя энергия складывается из кинетических энергий всех молекул, т.е. кинетическая энергия одного моля идеального газа равна произведению энергии одной молекулы Em на число молекул в моле NA : E Em N A i i kT N A RT . 2 2 (8.4) Внутренняя энергия произвольной массы идеального газа U M M i E RT , 2 (8.5) где M – масса газа; – масса одного моля газа. Следует отметить, что внутренняя энергия идеального газа зависит только от температуры, а изменение его внутренней энергии сопровождается изменением температуры: dU i M RdT . 2 (8.6) 261 8.3. Работа и теплота Выражение для работы, совершаемой газом при изменении его объема, проще получить на примере расширения или сжатия газа, заключенного в цилиндр с подвижным невесомым поршнем площадью S (рис. 8.4), скользящим без трения. Чтобы совершить работу против силы внешнего давления, газ должен действовать на поршень с силой F, равной произведению давления газа на площадь поршня: F=рS. (8.7) S dh р Рис. 8.4 Элементарная работа, совершаемая газом при перемещении поршня на отрезок dh, dA F dh p S dh PdV , (8.8) где dV=Sdh – изменение объема газа. Работа, совершаемая при конечном изменении объема газа от V1 до V2, V2 A PdV . (8.9) V1 Приращение объема системы может быть как положительным, так и отрицательным. Если dV > 0, то dA > 0: система совершает работу над внешними телами – отдает им часть своей энергии. Если dV < 0, то dA < 0: внешние тела совершают над системой работу – система получает энергию извне. Графически работа изображается в координатах p и V площадью, ограниченной кривой P = f (V) и двумя ординатами, соответствующими начальному V1 и конечному V2 объемам (рис. 8.5). Элементарная работа системы dA численно равна площади узкой заштрихованной полоски, полная работа A – площади криволинейной трапеции. Процесс, при котором система, пройдя некоторую последовательность состояний, снова возвращается в исходное состояние, называется круговым процессом (циклом). Вместе с тем, численное значение работы зависит от пути перехода системы из одного состояния в другое. Так, если система переходит из состояния 1 в состояние 2 один раз по пути (а), а другой раз по пути (b) (рис. 8.6), то A1а2 A1b2. Следовательно, работа, совершаемая при круговом процессе, отлична от нуля. Это означает, что силы давления – неконсервативные силы. 262 p A a p dA 1 2 c b 0 V1 V2 dV V V 0 V1 V2 Рис. 8.6 Рис. 8.5 Графически работа при круговом процессе изображается площадью, заключенной внутри кривой процесса (заштрихованная область на рис. 8.6). Работа за цикл положительна (система отдает энергию внешним телам), если цикл обходится по часовой стрелке, и отрицательна (система получает энергию извне), если цикл проходится против часовой стрелки. Действительно, работа, совершаемая системой за цикл 1a2c1, равна сумме работ, совершаемых на участках 1a2 и 2c1: А = А1а2 + А2с1 . Работа на участке 1а2 положительна (система расширяется) и по абсолютной величине равна площади криволинейной трапеции V1аV2. Работа на участке 2c1 отрицательна (объем системы уменьшается) и по абсолютной величине равна площади криволинейной трапеции V1сV2, которая меньше площади V1aV2. Следовательно, А = А1а2 + А2с1 > 0 . Пользуясь общим выражением работы в термодинамике (8.9), найдем работу в изопроцессах. Изохорический процесс осуществляется при нагревании или охлаждении газа при постоянном объеме сосуда. В этом процессе dV = 0 и газ не совершает работы: dA = pdV = 0 . Изобарический процесс осуществляется при нагревании или охлаждении газа, находящегося в цилиндре с подвижным поршнем. В изобарическом процессе A V2 V2 pdV p dV pV 2 V1 V1 V1 . (8.10) 263 Графически работа А в изобарическом процессе изображается заштрихованной площадью прямоугольника, приведенного на рис. 8.7. р=const р р А T=const А V1 V2 V1 V Рис. 8.7. V2 V Рис. 8.8. Изотермический процесс должен осуществляться настолько медленно, чтобы теплообмен между газом и окружающей средой не вызвал изменение температуры газа. Совершаемая газом в изотермическом процессе работа A V2 V2 M dV M V RT RT ln 2 , μ V μ V1 V1 pdV V1 (8.11) где р находится из уравнения Менделеева – Клапейрона. Эта работа измеряется площадью, заштрихованной на рис. 8.8. Передача тепловой энергии (теплоты) – энергии хаотического движения молекул – зависит от физических свойств системы, характера термодинамического процесса и выражается изменением температуры тела. Для характеристики способности тел повышать свою температуру за счет полученного извне тепла вводится понятие теплоемкость. Теплоемкость С – скалярная физическая величина, характеризующая связь между количеством сообщенного системе тепла и изменением ее температуры. Различают полную, молярную и удельную теплоемкости. Полная теплоемкость Спол численно равна количеству тепла, которое необходимо сообщить системе, чтобы повысить ее температуру на один градус dQ Спол = . dT (8.12) Молярная теплоемкость С численно равна количеству тепла, которую нужно сообщить одному киломолю вещества, чтобы повысить его температуру на один градус: 264 C Cпол dQ Cпол , M M M dT (8.13) где M число молей. Удельная теплоемкость (с) численно равна количеству тепла, которую нужно сообщить единице массы вещества, чтобы повысить ее температуру на один градус: c Cпол 1 dQ , M M dT (8.14) где M – масса вещества. Из сопоставления формул (8.13) и (8.14) следует, что С= с . (8.15) В зависимости от характера процесса различают теплоемкости при постоянном объеме СV и при постоянном давлении Ср. 8.4. Первое начало термодинамики Подобно тому, как в основе механики лежат законы Ньютона, и все задачи могут быть решены с их помощью, так в основе термодинамики лежат два закона – два начала термодинамики. Первое начало термодинамики утверждает тот факт, что в любых процессах должен соблюдаться закон сохранения и превращения энергии, т.е. первое начало представляет собой формулировку закона сохранения и превращения энергии применительно к тепловым процессам. Второе начало уточняет первое и показывает направление протекания всех процессов – стремление любой системы к минимуму потенциальной энергии. Рассмотрим термодинамическую систему, для которой механическая энергия остается постоянной, а изменяется лишь внутренняя энергия. Указанное изменение происходит в результате различных процессов, например совершения над системой работы и сообщения ей теплоты. Так, вдвигая поршень в цилиндр, в котором находится газ, мы сжимаем этот газ, в результате чего его температура повышается, т.е. изменяется внутренняя энергия газа. Кроме того, температуру газа и его внутреннюю энергию можно повысить за счет сообщения ему некоторого количества теплоты – энергии, переданной системе внешними телами путем теплообмена. Таким образом, можно говорить о двух формах передачи энергии от одних тел к другим: работе и теплоте. Энергия механического движения может превращаться в энергию теплового движения и наоборот. При этом соблюдается закон сохранения и превращения энергии; применительно к 265 термодинамическим процессам этим законом и является первое начало термодинамики. Пусть некоторая система (например, газ, заключенный в цилиндр под поршнем), обладающая внутренней энергией U1, получила количество теплоты Q и, перейдя в новое состояние, характеризующееся внутренней энергией U2, совершила работу против внешних сил. Условимся считать количество теплоты положительным, когда она подводится к системе, а работу положительной, когда система совершает ее против внешних сил. Опыт показывает, что при любом способе перехода системы из первого состояния во второе изменение внутренней энергии системы U = U2 – U1 будет одинаковым и равным разности между количеством теплоты Q, полученным системой, и работой А, совершенной системой: U = U2 – U1 = Q – A или Q = U + А . (8.16) Формула (8.16) и есть математическое выражение первого начала термодинамики: количество теплоты, подведенное к системе, затрачивается на изменение внутренней энергии системы и на совершение системой работы над внешними телами. Выражение (8.16) в дифференциальной форме (для бесконечно малого изменения состояния) будет иметь вид: Q = dU + A , (8.17) где Q – бесконечно малое количество теплоты; dU – изменение внутренней энергии системы; A – элементарная работа. Такая форма записи (8.17) обусловлена тем, что в отличие от внутренней энергии U, которая является однозначной функцией состояния системы и является полным дифференциалом, количество теплоты Q и работа А не являются функциями состояния системы и поэтому не могут быть полными дифференциалами. Так как внутренняя энергия является однозначной функцией состояния системы, то при совершении системой любого процесса, в результате которого она возвращается в исходное состояние, полное изменение ее внутренней энергии равно нулю: U dU 0 . (8.18) Тогда на основании первого начала термодинамики (8.16) Q = A. Это означает, что невозможно создать действующий механизм, который совершал бы работу, превышающую получаемую им энергию (А>Q). Воображаемый механизм, совершающий работу, большую получаемой энергии, называется вечным двигателем первого рода. Тогда можно сформулировать первое начало термодинамики следующим образом: вечный 266 двигатель первого рода невозможен (перпетуум-мобиле 1-го рода невозможен). 8.5. Применение первого начала термодинамики к изопроцессам в идеальном газе Изохорический процесс (V = const). Так как dV =0, то А = рdV =0, газ не совершает работы. Поэтому из первого начала термодинамики следует, что в изохорическом процессе все количество теплоты, сообщаемое газу, идет на изменение его внутренней энергии: Q = dU . (8.19) Это позволяет определить молярную теплоемкость газа при постоянном объеме СV (см. формулы (8.6), (8.13) и (8.19)): dU i M RdT, 2 CV dQ dU i R, M dT M dT 2 CV i R . 2 (8.20) Следовательно, молярная теплоемкость идеального газа при постоянном объеме зависит только от числа степеней свободы, т.е. от конструкции молекулы. Изобарический процесс (p = const). В этом изопроцессе обмен энергией происходит в форме и работы, и теплоты (см. формулу (8.17)) Q = dU + A = dU + pdV. Подводимое к газу тепло затрачивается на изменение внутренней энергии газа и на совершение им работы. Вводя молярную теплоемкость при постоянном давлении (см. формулу (8.13)), находим dQ dU pdV Cp . (8.21) M dT M dT M dT Здесь первое слагаемое равно СV (см. формулу (8.20)), а во втором заменим pdV правой частью уравнения Менделеева – Клапейрона: pV M RT , pdV M RdT . В итоге получаем Ср = СV + R . (8.22) 267 Соотношение (8.22) называется уравнением Майера. Оно показывает, что молярная теплоемкость идеального газа при постоянном давлении больше его молярной теплоемкости при постоянном объеме на величину R. Следовательно, Сp всегда больше СV, так как в изобарическом процессе в отличие от изохорического теплота, сообщаемая газу, расходуется не только на изменение его внутренней энергии, но также и на совершение газом работы. Сопоставляя (8.22) с первым началом термодинамики, получаем физическое содержание универсальной газовой постоянной R: это физическая величина, численно равная работе расширения одного киломоля идеального газа в изобарическом процессе при нагревании его на один градус. Подставляя формулу (8.20) в выражение (8.22), находим Cp i i2 RR R . 2 2 (8.23) Молярная теплоемкость при постоянном давлении Ср также зависит лишь от числа степеней свободы молекулы. Изотермический процесс (Т = const). dT = 0. Следовательно, в изотермическом процессе внутренняя энергия идеального газа не изменяется: dU i M RdT 0 , 2 и первое начало термодинамики запишется в виде Q = A = pdV, (8.24) т.е. вся теплота, сообщаемая газу, расходуется только на совершение им работы против внешних сил (изотермический процесс осуществляется с КПД, равным единице). Теплоемкость газа в изотермическом процессе бесконечна, так как Q 0 , dT = 0: СТ = dQ . dT (8.25) Адиабатический процесс. Изучая применение первого начала термодинамики к изопроцессам в идеальном газе, мы рассмотрели случаи: А = 0 (изохорический процесс), dU = 0 (изотермический процесс), Q 0, А 0, dU 0 (изобарический процесс). Очевидно, возможен процесс, при котором Q = 0. Такой процесс называется адиабатическим. 268 Адиабатическим называется процесс, при котором отсутствует теплообмен между системой и окружающей средой. К адиабатическим можно отнести все быстропротекающие процессы. Выведем уравнение адиабатического процесса. Из первого начала термодинамики (Q = dU + А) для адиабатического процесса следует, что А = dU, (8.26) т.е. работа совершается системой за счет уменьшения ее внутренней энергии. Так как А = pdV, а dU M μ CV dT , то при адиабатическом расширении dT < 0 (так как dV > 0, p > 0, CV > 0) – происходит охлаждение газа. При адиабатическом сжатии dV < 0 и соответственно dT > 0 – происходит нагревание газа. Уравнение адиабатического процесса получим из первого начала термодинамики (8.26), в котором заменим А и dU их выражениями (8.8) и (8.20): pdV M CV dT . (8.27) Величину M μ dT найдем из уравнения Менделеева Клапейрона: M μ RdT = d(pV) = p dV + Vdp . Таким образом, pdV CV pdV Vdp ; R учитывая, что для идеального газа СV + R = Cр , получаем Ср p dV + CV V dp = 0 . Разделив обе части уравнения на CVpV и введя обозначение C p CV , (8.28) (безразмерная величина (8.28), называется показателем адиабаты), запишем его в виде: dV dp γ 0, V p который можно представить как 269 d ln V +d ln p = 0 или d ln (pV ) = 0. Следовательно, в адиабатическом процессе уравнение состояния имеет вид p V = const . (8.29) Уравнение (8.29) называется уравнением Пуассона. Пользуясь уравнением Менделеева – Клапейрона, можно переписать формулу (8.28) в координатах pT и VT: pT γ 1 γ const и VT 1 γ 1 const . (8.30) Линию, изображающую адиабатический p dQ = 0 процесс, называют адиабатой. На рис. 8.9 приведена адиабата в координаT = const тах pV. Графически адиабатический процесс изображается кривой, падающей круче, чем кривая изотермического процесса, так как > 1 . Объясняется это тем, что при адиабатическом сжатии увеличение давления обусловлено не 0 V1 V2 V только уменьшением объема газа, как при изотермическом сжатии, но и увелиРис. 8.9 чением температуры. При адиабатическом расширении температура газа уменьшается, поэтому давление газа падает быстрее, чем при изотермическом расширении. Определим работу, совершаемую газом в адиабатическом процессе. Из формулы (8.27) элементарная работа, совершаемая системой в адиабатическом процессе, dA M CV dT , а работа на конечном интервале изменения температуры A Из формул (8.20) и (8.22) M CV T1 T2 . (8.31) 270 Cp CV CV R R или CV 1 , CV M RT1 p1V1 , A M RT2 p2V2 , (8.32) M 1 1 p1V1 p2V2 . RT1 T2 1 1 Так как в адиабатическом процессе dQ = 0, a dT 0, теплоемкость этого процесса dQ Cад 0 . dT 8.6. Политропические процессы Обобщением рассмотренных четырех изопроцессов является политропический процесс. Политропическим (политропным) процессом называют термодинамический процесс в идеальном газе с постоянной теплоемкостью, описываемый уравнением рV n =const, (8.33) где n – безразмерная постоянная величина, называемая показателем политропы. Различным значениям n соответствуют всевозможные разновидности политропического процесса. Так, n = 0 соответствует изобарическому процессу (p = const); n = 1 (pV = const) – изотермическому процессу; n = (pV = const) – адиабатическому; n = (V = const) – изохорическому. Выражение для работы в политропическом процессе записывается аналогично выражению (8.32) p V p2V2 A 1 1 . (8.34) n 1 Воспользовавшись первым началом термодинамики, выражением для молярной теплоемкости С идеального газа и уравнением Менделеева – Клапейрона, можно получить формулу для молярной теплоемкости политропического процесса: n C R (8.35) 1 n 1 , 271 которая является общей для всех изопроцессов. Из (8.35), в частности, при n = 0 получаем для изобарического процесса C R CV C p , 1 при n = 1 (изотермический процесс) C , при n = (адиабатический процесс) С = 0, при n (изохорический процесс) C R CV . 1 Круговым процессом или циклом называется процесс, при котором система, пройдя через ряд состояний, возвращается в исходное положение. На диаграмме процессов (рис. 8.10) цикл изображается замкнутой кривой. p p 1 а 1 A 2 b а 0 V1 V2 b 0 V -A 2 V1 V2 V б а Рис. 8.10 Цикл, совершаемый идеальным газом, можно разбить на процессы расширения (1 – 2) и сжатия (2 – 1) газа. Работа расширения (определяется площадью фигуры 1a2V2V1) положительна (dV > 0), работа сжатия определяется площадью фигуры 2b1V1V22) отрицательна (dV < 0). Следовательно, работа, совершаемая газом за цикл, определяется площадью, охватываемой замкнутой кривой. Если за цикл совершается положительная работа A pdV 0 (цикл протекает по часовой стрелке), то он называется прямым (см. рис. 8.10,а), если за цикл совершается отрицательная работа A pdV 0 (цикл протекает против часовой стрелки), то он называется обратным (см. рис. 8.10,б). Прямой цикл используется в тепловых двигателях – периодически действующих машинах, совершающих работу за счет полученной извне 272 теплоты. Обратный цикл используется в холодильных машинах – периодически действующих установках, в которых за счет работы внешних сил теплота переносится от тела с низкой температурой к телу с более высокой температурой. В результате кругового процесса система возвращается в исходное состояние, и, следовательно, полное изменение внутренней энергии газа равно нулю. Поэтому первое начало термодинамики для кругового процесса запишется в виде Q = U + A = A , (8.36) т.е. работа, совершаемая за цикл, равна количеству полученной извне теплоты. Однако в результате кругового процесса система может как получить теплоту, так и отдать ее, поэтому Q = Q1 – Q2 , где Q1 – количество теплоты, полученное системой; Q2 – количество теплоты, отданное системой. Поэтому термический коэффициент полезного действия для кругового процесса A Q1 Q2 Q 1 2 . Q1 Q1 Q1 (8.37) Термодинамический процесс называется обратимым, если он может происходить как в прямом, так и в обратном направлении. Причем если такой процесс происходит сначала в прямом, а затем в обратном направлении и система возвращается в исходное состояние, то в окружающей среде и в этой системе не происходит никаких изменений. Всякий процесс, не удовлетворяющий этим условиям, является необратимым. Любой равновесный процесс является обратимым. Обратимость равновесного процесса следует из того, что его любое промежуточное состояние есть состояние термодинамического равновеси; для него «безразлично», идет процесс в прямом или обратном направлении. Реальные процессы сопровождаются диссипацией энергии (из-за трения, теплопроводности и т. д.), которая нами не обсуждается. Обратимые процессы – это идеализация реальных процессов. Их рассмотрение важно по двум причинам: 1) многие процессы в природе и технике обратимы; 2) обратимые процессы являются наиболее экономичными: имеют максимальный термический коэффициент полезного действия, что позволяет указать пути повышения КПД реальных тепловых двигателей. 273 8.7. Тепловые двигатели и холодильные машины. Цикл Карно и его КПД Из формулировки второго начала термодинамики, по Кельвину, следует, что вечный двигатель второго рода – периодически действующий двигатель, совершающий работу за счет охлаждения одного источника теплоты – невозможен. Для иллюстрации этого положения рассмотрим работу теплового двигателя (исторически второе начало термодинамики и возникло из анализа тепловых двигателей). Принцип действия теплового двигателя приведен на рис. 8.11. От Т1 Т1 Q1 Q1 Тепловой двигатель A Холодильная машина Q2 Т2 Рис. 8.11 A Q2 Т2 Рис. 8.12 термостата (термодинамическая система, которая может обмениваться теплотой с телами без изменения температуры) с более высокой температурой Т1, называемого нагревателем, за цикл отнимается количество теплоты Q1, а термостату с более низкой температурой Т2, называемому холодильником, за цикл передается количество теплоты Q2, при этом совершается работа A = Q1 – Q2. Чтобы термический коэффициент полезного действия теплового двигателя (8.37) был равен единице ( = 1), должно быть выполнено, условие Q2 = 0, т.е. тепловой двигатель должен иметь один источник теплоты, а это невозможно. Так, французский физик и инженер Сади Карно показал, что для работы теплового двигателя необходимо не менее двух источников теплоты с различными температурами, иначе это противоречило бы второму началу термодинамики. Процесс, обратный происходящему в тепловом двигателе, используется в холодильной машине, принцип действия которой представлен на рис. 8.12. Системой за цикл от термостата с более низкой температурой Т2 отнимается количество теплоты Q2 и отдается термостату с более высокой температурой Т1 количество теплоты Q1. Для кругового процесса, согласно (8.36), Q = A, но по условию Q = Q2 – Q1 < 0, поэтому A < 0 и Q2 – Q1 = –A, или Q1 = Q2 + A, т.е. количество теплоты Q1, отданное системой источнику теплоты при более высокой температуре Т1, больше количества теплоты Q2, полученного от 274 источника теплоты при более низкой температуре Т2, на величину работы, совершенной над системой. Следовательно, без совершения работы нельзя отбирать теплоту от менее нагретого тела и отдавать ее более нагретому телу. Это утверждение есть не что иное, как второе начало термодинамики в формулировке Клаузиуса. Однако второе начало термодинамики не следует представлять так, что оно совсем запрещает переход теплоты от менее нагретого тела к более нагретому. Ведь именно такой переход осуществляется в холодильной машине. Но при этом надо помнить, что внешние силы совершают работу над системой, т.е. этот переход не является единственным результатом процесса. Основываясь на втором начале термодинамики, Карно вывел теорему, которая называется теоремой Карно: из всех периодически действующих тепловых машин, имеющих одинаковые температуры нагревателей (Т1) и холодильников (Т2), наибольшим КПД обладают обратимые машины; при этом КПД обратимых машин, работающих при одинаковых температурах нагревателей и холодильников, равны друг другу и не зависят от природы рабочего тела (тела, совершающего круговой процесс и обменивающегося энергией с другими телами). Карно теоретически проанализировал p 1 обратимый наиболее экономичный цикл, Q1 состоящий из двух изотерм и двух адиабат. Этот цикл и называется циклом Карно. Рассмотрим прямой цикл Карно, в котором в T1 2 качестве рабочего тела используется идеальный газ, заключенный в сосуд с 4 T2 подвижным поршнем. 3 Цикл Карно изображен на рис. 8.13, где Q2 V изотермические расширение и сжатие заданы соответственно кривыми 1-2 и 3-4, а Рис. 8.13 адиабатические расширение и сжатие – кривыми 2-3 и 4-1. При изотермическом процессе U = const, поэтому, согласно (8.11), количество теплоты Q1, полученное газом от нагревателя, равно работе расширения А12, совершаемой газом при переходе из состояния 1 в состояние 2: A12 M V RT1 ln 2 Q1 . V1 (8.38) При адиабатическом расширении 2-3 теплообмен с окружающей средой отсутствует, и работа расширения А23 совершается за счет изменения внутренней энергии (см.(8.26) и (8.31)): A23 M CV T2 T1 . 275 Количество теплоты Q2, отданное газом изотермическом сжатии, равно работе сжатия А34: A34 холодильнику M V RT2 ln 4 Q2 . V3 при (8.39) Работа адиабатического сжатия A41 M CV T1 T2 A23 . Работа, совершаемая в результате кругового процесса, А = А12 + А23 + А34 + А41 = Q1 +A23 – Q2 – A23 = Q1 – Q2 , И определяется площадью фигуры, показанной на рис. 8.13. Термический КПД цикла Карно, согласно (8.37), η A Q1 Q2 Q1 Q1 . Применив уравнение (8.30) для адиабат 2-3 и 4-1, получим T1V2γ 1 T2V3γ 1 , T1V1γ 1 T2V4γ 1 , откуда V2 V3 . V1 V4 (8.40) Подставляя (8.38) и (8.39) в формулу (8.37), получим M V M V RT1 ln 2 RT2 ln 3 Q Q2 V1 V4 T1 T2 1 M V2 Q1 T1 RT1 ln V1 , (8.41) т.е. для цикла Карно КПД действительно определяется только температурами нагревателя и холодильника. Для его повышения необходимо увеличивать разность температур нагревателя и холодильника. Обратный цикл Карно лежит в основе действия тепловых насосов. В отличие от холодильных машин тепловые насосы должны как можно больше тепловой энергии отдавать горячему телу, например системе отопления. 276 Теорема Карно послужила основанием для установления термодинамической шкалы температур. Сравнив левую и правую части формулы (8.41), получим T2 Q2 , (8.42) T1 Q1 т.е. для сравнения температур Т1 и Т2 двух тел необходимо осуществить обратимый цикл Карно, в котором одно тело используется в качестве нагревателя, другое – холодильника. Из равенства (8.42) видно, что отношение температур тел равно отношению отданного в этом цикле количества теплоты к полученному. Согласно теореме Карно, химический состав рабочего тела не влияет на результаты сравнения температур, поэтому такая термодинамическая шкала не связано со свойствами какого-то определенного термометрического тела. 8.8. Энтропия, ее статистическое толкование и связь с термодинамической вероятностью Для выяснения физического содержания понятия энтропии рассматривают отношение теплоты Q, полученной телом в изотермическом процессе, к температуре Т теплоотдающего тела, называемое приведенным количеством теплоты. Приведенное количество теплоты, сообщаемое телу на бесконечно малом участке процесса, равно Q/Т. Приведенное количество теплоты, сообщаемое телу в любом обратимом круговом процессе, равно нулю: δQ T 0. (8.43) Из равенства нулю интеграла (8.43), следует, что подынтегральное выражение Q/Т есть полный дифференциал некоторой функции, которая определяется только состоянием системы и не зависит от пути, каким система пришла в это состояние. Таким образом, Q dS . T (8.44) Функция состояния, дифференциалом которой является Q/Т, называется энтропией и обозначается S. Из формулы (8.43) следует, что для обратимых процессов изменение энтропии равно нулю: S = 0 . (8.45) 277 В термодинамике доказывается, что энтропия системы, совершающей необратимый цикл, возрастает: S > 0 . (8.46) Выражения (8.45) и (8.46) относятся только к замкнутым системам, если система обменивается теплотой с внешней средой, то ее энтропия может вести себя произвольным образом. Соотношения (8.45) и (8.46) можно представить в виде неравенства Клаузиуса S 0 , (8.47) т.е. энтропия замкнутой системы может либо возрастать (в случае необратимых процессов), либо оставаться постоянной (в случае обратимых процессов). Это является одной из формулировок второго начала термодинамики. Каждое состояние системы характеризуется определенным значением энтропии S, подобно тому, как оно характеризуется значением внутренней энергии U. Так как энтропия возрастает только в неравновесном процессе, то ее увеличение происходит только до тех пор, пока система не достигнет равновесного состояния. Следовательно, равновесное состояние соответствует максимуму энтропии. С этой точки зрения энтропия является мерой близости системы к состоянию равновесия, то есть к состоянию с минимальной потенциальной энергией. Необходимо подчеркнуть, что формулировка второго закона термодинамики с точки зрения энтропии относится только к самопроизвольным процессам, протекающим в замкнутых системах. Энтропия обладает свойством аддитивности: энтропия системы равна сумме энтропий тел, входящих в систему. Свойством аддитивности обладают также внутренняя энергия, масса, объем (температура и давление таким свойством не обладают). Более глубокий смысл энтропии вскрывается в статистической физике. Энтропия связывается с термодинамической вероятностью состояния системы. Термодинамическая вероятность W состояния системы – это число способов, которыми может быть реализовано данное состояние макроскопической системы, или число микросостояний, осуществляющих данное макросостояние (по определению, W 1 , т.е. термодинамическая вероятность не является вероятностью в математическом смысле, так как математическая вероятность ω 1 ) Согласно Больцману, энтропия S системы и термодинамическая вероятность связаны между собой следующим образом: S = k ln W , (8.48) 278 где k – постоянная Больцмана. Таким образом, энтропия определяется логарифмом числа микросостояний, с помощью которых может быть реализовано данное макросостояние. Следовательно, энтропия может рассматриваться как мера вероятности состояния термодинамической системы. Формула Больцмана (8.48) позволяет дать энтропии следующее статистическое толкование: энтропия является мерой неупорядоченности системы. В самом деле, чем больше число микросостояний, реализующих данное макросостояние, тем больше энтропия. В состоянии равновесия – наиболее вероятном состоянии системы – число микросостояний максимально, при этом максимальна и энтропия. Так как реальные процессы необратимы, то можно утверждать, что все процессы в замкнутой системе ведут к увеличению ее энтропии – принцип возрастания энтропии. При статистическом толковании энтропии это означает, что процессы в замкнутой системе идут в направлении увеличения числа микросостояний, иными словами, от менее вероятных состояний к более вероятным, до тех пор, пока вероятность состояния не станет максимальной. Необходимо отметить, что эти утверждения имеют место для систем, состоящих из очень большого числа частиц, но могут нарушаться в системах с малым числом частиц. Для «малых» систем могут наблюдаться флуктуации, т.е. энтропия и термодинамическая вероятность состояний замкнутой системы на определенном отрезке времени могут убывать, а не возрастать, или оставаться постоянным. 8.9. Второе начало термодинамики Первое начало термодинамики позволяет определить, возможен ли с энергетической точки зрения тот или иной процесс в замкнутой системе. Но при этом не говорится о возможных направлениях протекания процессов (в частности, самопроизвольных). Так, первое начало термодинамики не запрещает самопроизвольного перехода теплоты от холодного тела к горячему. Но, как известно, в природе такие процессы не наблюдаются. Второе начало термодинамики (его появление вызвано необходимостью дать ответ на вопрос, какие процессы в природе возможны, а какие нет) определяет направление развития процессов. Используя понятие энтропии и неравенство Клаузиуса, второе начало термодинамики можно сформулировать как закон возрастания энтропии замкнутой системы при необратимых процессах: любой необратимый процесс в замкнутой системе происходит так, что энтропия системы при этом возрастает. Можно дать более краткую формулировку второго начала термодинамики: в процессах, происходящих в замкнутой системе, энтропия не убывает. Здесь существенно, что речь идет о замкнутых системах, так как в незамкнутых системах энтропия может вести себя произвольным образом. 279 Формула Больцмана (8.43) позволяет объяснить постулируемое вторым началом термодинамики возрастание энтропии в замкнутой системе при необратимых процессах: возрастание энтропии означает переход системы из менее вероятных в более вероятные состояния. Таким образом, формула Больцмана позволяет дать статистическое толкование второго начала. Это начало, являясь статистическим законом, описывает закономерности хаотического движения большого числа частиц, составляющих замкнутую систему. Укажем еще две формулировки второго начала термодинамики: 1. По Кельвину, невозможен круговой процесс, единственным результатом которого является превращение теплоты, полученной от нагревателя, в эквивалентную ей работу; 2. По Клаузиусу, невозможен круговой процесс, единственным результатом которого является передача теплоты от менее нагретого тела к более нагретому. 8.10. Применение второго начала термодинамики для определения изменения энтропии в процессах идеального газа Второе начало не отрицает, а дополняет первое начало термодинамики, и поэтому должно содержать его в своем определении. Действительно, в определение энтропии входит величина Q, определяемая первым началом: dS δQ dU δA . T T (8.49) Формула (8.49) позволяет определять изменение энтропии в различных процессах идеального газа. Адиабатический процесс. При адиабатическом процессе Q = 0. Поэтому изменение энтропии ΔS δQ 0. T Таким образом, в адиабатическом процессе энтропия системы не изменяется. Следовательно, адиабатические процессы – изоэнтропические. Изотермический процесс. Используя первое начало термодинамики (8.17), формулы (8.24) и (8.11), находим приращение энтропии в изотермическом процессе: 2 2 δQ δA 1 M V M V ΔS RT ln 2 R ln 2 . T T T V1 V1 1 1 (8.50) 280 Так как V2 > V1, то S > 0, т.е. в изотермическом процессе энтропия возрастает. Изохорический процесс. Исходя из первого начала термодинамики (8.17) и формул (8.19) и (8.20), находим приращение энтропии: 2 2 2 δQ dU M dT M T ΔS CV CV ln 2 . T T T T1 1 1 1 (8.51) Следовательно, при изохорическом нагревании (Т2 > Т1) энтропия идеального газа возрастает. Изобарический процесс. Согласно первому началу термодинамики (8.17) и формуле (8.21) приращение энтропии 2 2 2 δQ dU M dT M T ΔS Cp C p ln 2 , T T T T1 1 1 1 (8.52) т.е. в изобарическом процессе (Т2 > Т1) энтропия идеального газа увеличивается. В середине ХIХ века возникла проблема так называемой тепловой смерти Вселенной. Рассматривая Вселенную как замкнутую систему и применяя к ней второе начало термодинамики, Клаузиус свел его содержание к утверждению, что энтропия Вселенной должна достигнуть своего максимума. Это означает, что со временем все формы движения должны перейти в тепловую. Переход же теплоты от горячих тел к холодным приведет к тому, что температура всех тел во Вселенной сравняется, т.е. наступит полное тепловое равновесие, и все процессы во Вселенной прекратятся – наступит тепловая смерть Вселенной. Ошибочность вывода о тепловой смерти заключается в том, что бессмысленно применять второе начало термодинамики к незамкнутым системам, например к такой безграничной и бесконечно развивающейся системе, как Вселенная. 8.11. Третье начало термодинамики, или теорема Нернста – Планка Первые два начала термодинамики дают недостаточно сведений о поведении термодинамических систем при нуле по шкале Кельвина. Они дополняются третьим началом термодинамики, или теоремой Нернста – Планка: энтропия всех тел в состоянии равновесия стремится к нулю по мере приближения температуры к нулю Кельвина: lim S 0 . T 0 281 Так как энтропия определяется с точностью до аддитивной постоянной, то эту постоянную удобно взять равной нулю. Из теоремы Нернста – Планка следует, что теплоемкости Ср и СV при Т = 0 К равны нулю. ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ. 1. Что понимают под термодинамической системой? 2. Какое состояние называется термодинамическим равновесием? 3. Что понимают под внутренней энергией? Каковы ее свойства? 4. Что такое теплота? Каковы ее свойства? 5. Что понимают под числом степеней свободы молекулы? 6. Сколькими степенями свободы обладают одно- , двух-, трехатомные и многоатомные молекулы? 7. Как распределяется энергия по степеням свободы? Запишите выражение для энергии, приходящейся на одну степень свободы молекулы. 8. Как выражается: а) полная кинетическая энергия молекулы; б) внутренняя энергия одного моля; в) внутренняя энергия произвольной массы идеального газа? 9. Чему равно изменение внутренней энергии при изотермическом процессе, при других изопроцессах? 10. Как математически выражается работа в термодинамике? 11. В каком случае работа термодинамической системы положительна, отрицательна? 12. Как по графику (р,V) найти работу? 13. Какой термодинамический процесс называется круговым? 14. Как по графику (р,V) найти работу кругового процесса? Когда она положительна, отрицательна? 15. Как выражается работа газа при изобарическом процессе, при изотермическом процессе? Как найти в этих случаях работу по графику (р,V)? 16. В чем сходство и в чем различие между работой и теплотой? 17. Что такое теплоемкость? 18. Какая теплоемкость называется удельной, мольной, полной, при постоянном объеме, при постоянном давлении? 19. Как связаны удельная и мольная теплоемкости? 20. Сформулируйте первое начало термодинамики. Дайте пояснения. 21. Запишите уравнение первого начала термодинамики. 22. Что такое вечный двигатель первого рода? 23. Какие практические выводы вытекают из первого начала термодинамики? 24. Какой вид принимает первое начало термодинамики в применении к изотермическому, изобарическому, изохорическому процессу? 25. Как выражается мольная теплоемкость газов через число степеней свободы: при постоянном объеме, при постоянном давлении? 282 26. Какая теплоемкость больше при постоянном давлении или при постоянном объеме и почему? 27. Каково соотношение между теплоемкостями при постоянном объеме и при постоянном давлении? 28. Чему равна теплоемкость газа в изотермическом процессе? Поясните результат. 29. Какой процесс называется адиабатическим? 30. Как осуществляется и находит ли применение на практике адиабатический процесс? 31. Как изменяется температура газа при адиабатическом расширении, при адиабатическом сжатии? Объясните результат, пользуясь первым началом термодинамики. 32. Каким уравнением описывается адиабатический процесс? 33. Как записывается работа в адиабатическом процессе? 34. При каком процессе происходит более быстрое изменение давления в зависимости от изменения объема – при изотермическом или адиабатическом? 35. Изобразите на одном графике в координатах p и V адиабату и изотерму. 36. Чему равна теплоемкость в адиабатическом процессе? Поясните результат. 37. Какой процесс называется политропическим? 38. Написать уравнение политропического процесса. Какие значения может принимать показатель политропы? 39. Запишите выражение работы в политропическом процессе. 40. Запишите выражение теплоемкости в политропическом процессе. 41. Какое значение принимает показатель политропы в адиабатическом, изотермическом, изохорическом, изобарическом процессе? 42. Получите из уравнения политропического процесса уравнения адиабатического, изотермического, изохорического, изобарического процессов. 43. Как из выражения теплоемкости в политропическом процессе получить теплоемкость в адиабатическом, изотермическом, изохорическом, изобарическом процессах? 44. Какие термодинамические системы называют замкнутыми (изолированными)? 45. Какой процесс называется обратимым и какой – необратимым? 46. Приведите примеры обратимых (необратимых) газовых процессов и объясните, почему они обратимы (необратимы). 47. Изложите принцип работы тепловой машины. 48. При каком условии тепловая машина может совершать работу при круговом процессе? 49. Что такое коэффициент полезного действия? 50. Как математически выражается КПД кругового газового процесса? 51. Что называется циклом Карно? 52. Почему цикл Карно называется идеальным? 283 53. Чему равен КПД цикла Карно? 54. Что дает цикл Карно в теоретическом, практическом отношении? 55. Как соотносятся КПД реального цикла и цикла Карно? Объясните результат. 56. Каков принцип действия холодильной машины? 57. Сформулируйте второе начало термодинамики. 58. Что такое вечный двигатель второго рода? Возможен ли он? 59. Что такое приведенная теплота? 60. Что называется энтропией? Что характеризует эта функция? 61. Как меняется энтропия при обратимом и необратимом процессе? 62. Сформулируйте второе начало термодинамики с точки зрения понятия энтропии. 63. Каков статистический смысл второго начала термодинамики? 64. Что такое термодинамическая вероятность? 65. Какова связь энтропии с термодинамической вероятностью? 66. Каковы статистические формулировки второго начала термодинамики? 67. Перечислите свойства энтропии. 68. Как изменяется энтропия: а) в адиабатическом, б) изохорическом, в) изотермическом, г) изобарическом, д) политропическом процессах? 69. Изложить сущность теории «тепловой смерти» Вселенной и критику этой теории. Список литературы 1. Трофимова Т.И. Курс физики: Учеб. пособие. 7 изд., испр. М.: Высш. шк., 2001. 542 с. 2. Детлаф А.А. Курс физики: Учеб. пособие для вузов. – 2-е изд., испр. и доп. – М.: Высш. шк., 1999. – 718 с. 3. Савельев И.В. Курс общей физики: в 3 т. – М.: Наука, 1977. Т.1. 233 с; 1978. Т.2. 233 с. 4. Сивухин Д.В. Общий курс физики: в 5 т. – М.: Наука, 1974. Т.1. Механика 233 с. 5. Иродов И. Е., Основные законы механики. – М.: Высш. шк., 1985. 233 с. 6. Чертов А.Г. Задачник по физике для втузов. – 4-е изд., испр. – М.: Интеграл – Пресс, 1988. – 544 с. 7. Волькенштейн В.С. Сборник задач по общему курсу физики: Учеб. пособие. – 11-е изд., перераб. –М.: Наука. – Физматлит,1985. – 384 с.