Материальная точка
реклама

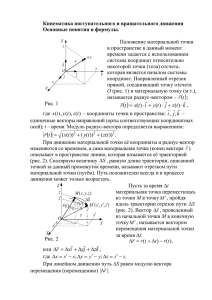
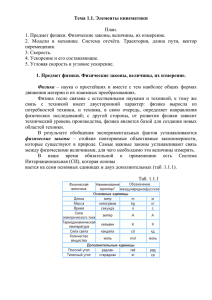
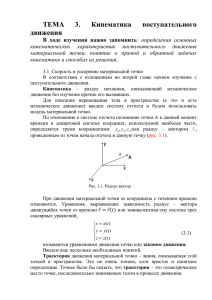
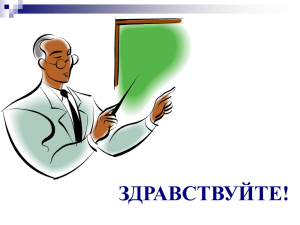
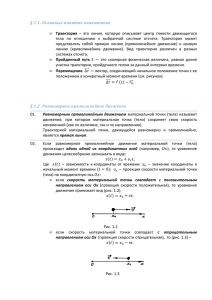
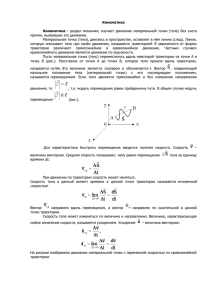
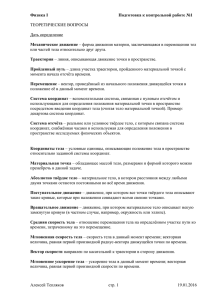
Кинематика движения материальной точки и абсолютно твердого тела Движение материальной точки Материальная точка – физическая модель объекта Модель – абстрактная система, являющаяся упрощенной копией реальной системы. Материальная точка – тело, размерами которого можно пренебречь в условиях данной задачи. Движение тел происходит в пространстве и времени. Следовательно, для описания движения материальной точки надо знать, в каких местах пространства эта точка находится в различные моменты времени. Положение материальной точки определяется по отношению к какомулибо другому произвольно выбранному телу. Тело отсчета – условное неподвижное тело, относительно которого определяется положение движущегося тела. Тело отсчета – реальный объект. С телом отсчета связывают систему координат – это абстракция (декартова с.к., сферическая с.к.). Приборы, служащие для определения положения движущегося тела – линейка и т.п. Прибор, служащий для определения времени – часы – любой периодический процесс. Если есть несколько тел и, соответственно, несколько часов, то необходимы приборы для синхронизации часов. Тело отсчета, связанная с ним система координат, линейка, часы и приборы для синхронизации часов составляют пространственно-временную систему отсчета. Гелиоцентрическая СО – тело отсчета Солнце. Геоцентрическая СО – тела отсчета Земля. Положение материальной точки в системе отсчета Наиболее часто используется декартова система отсчета. y j x – ось абцисс (абцисса), y – ордината, z – аппликата. y 0 x k i z z x Положение материальной точки характеризуется тремя координатами (x,y,z) или радиус-вектором r xi yj zk , i, y j, единичные вектора (орты). i j k 1. j r x y z . 2 y 0 x k i z z k x 2 2 При движении материальной точки её координата с течением времени изменяется. Движение материальной точки определяется скалярными уравнениями x xt ; y y t ; z z t , или векторным уравнением r r t . Эти уравнения называются кинематическими уравнениями движения материальной точки. Траектория точки. Длина пути. Вектор перемещения (перемещение). y r1 0 Принцип независимости движения Число независимых S координат, полностью определяющих положение Δr точки в пространстве, r2 называется число степеней свободы. x r t - радиус вектор. Траектория – кривая, которую описывает радиус вектор материальной точки при её движении. В зависимости от формы траектории движение разделяется на - прямолинейное, - криволинейное. Расстояние, отсчитанное вдоль траектории, (длина участка траектории) называется длиной пути S. S t - скалярная функция. Направленный отрезок прямой (вектор), соединяющий S y r начальную и конечную точки Δr траектории называется r вектором перемещения 0 x (перемещением). 1 2 r r2 r1; r S . При прямолинейном движении r S Если движение происходит в течение бесконечно малого времени Δt → 0, то по модулю путь равен перемещению dS dr . Если материальная точка участвует в нескольких перемещениях, то результирующее перемещение равно векторной сумме перемещений, совершаемых материальной точкой в каждом из движений в отдельности: r ri . y Δ r1 r r1 r2 Δr Δ r2 x Скорость движения материальной точки. Понятие о кривизне Для характеристики движения материальной точки вводится понятие скорости – векторная величина. S1 Δ r1 v ср1 Δ r2 v ср2 Материальная точка движется по криволинейной траектории. За время Δt1 точка проходит путь S1 и получает приращение Δr1 , За время Δt2 – Δr2 . Вектор средней скорости – отношение перемещения к промежутку времени r1 vср1 ; t1 vср 2 r2 ; t 2 r vср v ; t v r . Вектор средней скорости характеризует изменение положения радиус-вектора. t 0 v стремится к Если предельному значению. Мгновенная скорость материальной точки – векторная величина, равная первой производной радиус-вектора движущейся точки повремени. r dr v lim t 0 t dt t 0 dr dS , следовательно, модуль мгновенной скорости равен первой производной пути по времени: dS v v . dt В математике производной функции y f x в точке x0 называется предел отношения изменения функции Δy в этой точке к вызвавшему его изменению аргумента Δx при произвольном стремлении Δx к нулю dy y y x y x lim . x 0 x dx Физический смысл производной: это среднее значение изменения функции на таком интервале, на котором среднее значение функции не меняется. Мгновенная скорость dr dx dy dz v i j k. dt dt dt dt dx dy dz vx ; vy ; v z – проекции dt dt dt вектора скорости 2 2 2 v vx v y vz . на оси координат. Неравномерное движение y Средняя скорость неравномерного S – скалярная движения v величина. t S r1 S r Δr r2 0 x v v Средняя скорость больше модуля вектора средней скорости. Вычисление пройденного пути. Понятие об интеграле v ti 0. 2 1 vi – мгновенная скорость. S i vi ti . 0 n t1 Δ ti t2 t (1) n S S i vi ti . i 1 ( 2) i 1 n t2 vt dt vt dt. t 0 S lim i 1 t1 (3) 2 1 v 0 t1 Δ ti t2 t Физический смысл интеграла – бесконечно большая сумма бесконечно малых слагаемых. Геометрический смысл интеграла – площадь под кривой, ограниченная двумя перпендикулярами и осью абсцисс. Средняя скорость прохождения пути vср S . t (4) Средняя скорость неравномерного движения – средняя скорость такого равномерного движения, при котором материальная точка за то же время проходит тот же путь. Ускорение 1 y v v2 v1. v1 (1) 2 v2 Δv Мгновенное ускорение v2 v dv a lim vt v t . t 0 t dt 2 dv d dr d r a 2 . (3) dt dt dt dt x ( 2) Модуль среднего ускорения: a 2 d S dt 2 . ( 4) Ускорение движения материальной точки это первая производная от вектора скорости по времени или вторая производная от радиусвектора по времени. ax , a y , az a ax i a y j az k , – проекции вектора ускорения на координатные оси dvx d 2 x ax 2; dt dt dv y d 2 y ay 2 ; dt dt dvz d 2 z az 2. dt dt a a x2 a y2 a z2 . Понятие о кривизне v1 ΔS 1 v1 2 Δφ Δφ v2 Δφ - угол между касательными в точках, отстоящих друг от друга на расстоянии ΔS. Кривизна d C lim . S 0 S dS Кривизна траектории характеризует скорость поворота касательной при движении или степень искривленности кривой. Радиус кривизны траектории в данной точке есть величина обратная кривизне 1 R . C Радиус кривизны траектории в данной точке есть радиус окружности, которая сливается на бесконечно малом участке в данном месте с кривой. Нормальное и тангенсальное ускорения при криволинейном движении Δ vτ Разложим вектор Δv на две составляющие. v1 Δ vn v2 Δv v2 v v2 v1; v v vn . dv d R d dR a R dt dt dt dt 2 v R v R R R 2 R R . R a an Нормальное и тангенсальное ускорение aτ v an a dv a an a . (1) dt an нормальное ускорение характеризует изменение скорости по направлению. Вектор an направлен в данной точке перпендикулярно скорости к центру кривизны траектории (центростремительное ускорение). a – тангенсальное ускорение характеризует aτ изменение скорости по величине и направлено вдоль скорости (или в обратную сторону). dv a . (3) dt v an a 2 2 a an a . (4) Любое криволинейное движение можно представить как суперпозицию поступательного и вращательного движений. Основная задача механики Состоит в нахождении закона движения – кинематического уравнения. Закон движения – зависимость положения тела от времени в выбранной системе отсчета. r r t . x xt , y y t , z z t . (1) (2) Понятие об абсолютно твердым телом (АТТ). Поступательное и вращательное движение Абсолютно твердое тело – это модель, тело расстояние между любыми двумя точками которого в процессе движения не меняется. Поступательное движение – движение, 2 1 2 1 при котором любая прямая проведенная внутри тела, перемещается параллельно самой себе. При поступательном движении все точки тела за одно и тоже время совершают одинаковые перемещения и в один и тот же момент времени имеют одинаковые скорости и ускорения. Абсолютно твердое тело • Поступательное движение АТТ можно рассматривать, как движение материальной точки. Кинематические уравнения. 1. Равномерное движение материальной точки вдоль оси x. a 0 xt x0 v0 t , x0 – начальная координата. Кинематические уравнения. 2. Равнопеременное движение. 2 at x x0 v0t , 2 v v0 at. Вращательное движение АТТ относительно неподвижной оси – движение, при котором все точки тела движутся по окружностям, центры которых лежат на прямой, называемой осью вращения. Δφ R 1 R 2 При вращательном движении точек тел, находящихся на разном расстоянии от оси вращения, они за одно и то же время совершают разные перемещения и в один и тот же момент времени имеют разные v и a. В то же время радиус-вектор, соединяющий точки тела с осью вращения, за одно и то же время поворачивается на один и тот же угол Δφ. Δφ R 1 R 2 • Угол поворота служит для определения положения тела и закон движения – кинематическое уравнение имеет вид t . Вектор элементарного угла поворота. Вектор угловой скорости и углового перемещения. Связь линейных и угловых характеристик движения R dφ ω d v • Положение материальной точки, совершающей вращательное движение, определяется углом поворота d . – векторная величина (псевдовектор, аксиальный вектор). Модуль равен углу поворота. d Направление определяется правилом правого винта. Угловая скорость – векторная величина, равная первой производной угла поворота по времени d рад , (1 ) d , . dt сек Линейная скорость точки S R v lim lim R lim R. t 0 t t 0 t t 0 t В векторном виде v , R . (2) В векторном виде v , R . (2) Векторное произведение по модулю равно v R sin , R. α ω R v Направление вектора v совпадает с направлением поступательного движения правого винта при его вращении от вектора ω к R. Угловое ускорение – векторная величина, равная первой производной угловой скорости 2 d d по времени dt dt 2 . (3) При ускоренном движении ; при замедленном движении . ε aτ an ω d 0 dt ω ε an v 1 2 aτ d 0 dt v ω 2 ω 1 Кинематическое уравнение равномерного вращения 0 0 t . Частота вращения: Период: T 2 . N n ; t 1 n . T Кинематическое уравнение равнопеременного вращения 0 t t const 2 2 . Длина пути, пройденного точкой по дуге радиуса R: S R; Sокр 2R. Скалярное и векторное произведение векторов ● Скалярное произведение: С A B cos , A, B. Пример: работа, совершаемая силой A FS cos . ● Векторное произведение: C A, B , C A B sin . C B α A Направление вектора С определяется по правилу правого винта: 1. С перпендикулярен плоскости векторов А, В. 2. Направление вектора С совпадает с направление поступательного движения правого винта при его вращении от А к В. Другое правило: если наблюдать с конца вектора С, то кратчайший поворот от А до совмещения с В – против часовой стрелки.