Тема 1.1. Элементы кинематики План. 1. Предмет физики
реклама

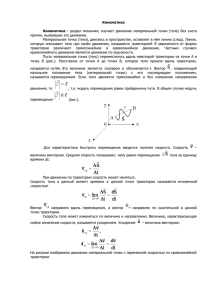
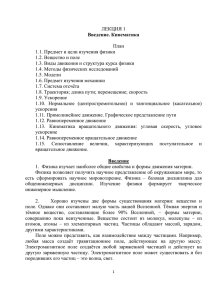
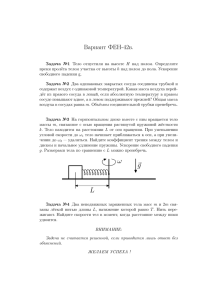
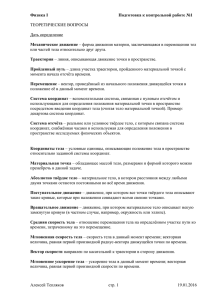
Тема 1.1. Элементы кинематики План. 1. Предмет физики. Физические законы, величины, их измерение. 2. Модели в механике. Система отсчёта. Траектория, длина пути, вектор перемещения. 3. Скорость. 4. Ускорение и его составляющие. 5. Угловая скорость и угловое ускорение. 1. Предмет физики. Физические законы, величины, их измерение. Физика – наука о простейших и вместе с тем наиболее общих формах движения материи и их взаимных преобразованиях. Физика тесно связана с естественными науками и техникой, к тому же связь с техникой имеет двусторонний характер: физика выросла из потребностей техники, и техника, в свою очередь, определяет направления физических исследований; с другой стороны, от развития физики зависит технический уровень производства, физика является базой для создания новых областей техники. В результате обобщения экспериментальных фактов устанавливаются физические законы – стойкие повторяемые объективные закономерности, которые существуют в природе. Самые важные законы устанавливают связь между физическими величинами, для чего необходимо эти величины измерять. В наше время обязательной к применению есть Система Интернациональная (СИ), которая основы вается на семи основных единицах и двух дополнительных (таб. 1.1.1). Таб. 1.1.1 2. Модели в механике. Система отсчёта. Траектория, длина пути, вектор перемещения. Механика – часть физики, которая изучает закономерности механического движения и причины, вызывающие или изменяющие это движение. Механическое движение – это изменение с течением времени взаимного расположения тел или их частей. Механика делится на три раздела: 1) кинематику; 2) динамику; 3) статику. Кинематика изучает движение тел, не рассматривая причины, определяющие движение. Динамика изучает законы движения тел и причины, вызывающие или изменяющие это движение. Статика изучает законы равновесия системы тел. Механика для описания движения тел в зависимости от условий конкретных задач использует разные физические модели. Простейшей моделью является материальная точка – тело, обладающее массой, размерами которого в данной задаче можно пренебречь. Любое движение твёрдого тела можно представить как комбинацию поступательного и вращательного движений. Поступательное движение – это движение, при котором любая прямая, жёстко связанная с движущимся телом, остаётся параллельной своему первоначальному положению. Вращательное движение – это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. Движение тел происходит в пространстве и во времени. Положение точки определяется по отношению к какому-то другому, произвольно избранному телу, называемого телом отсчета. С ним связана система отсчета – совокупность системы координат и часов, связанных с телом отсчета. В декартовой системе координат положение точки A в данный момент времени характеризуется тремя координатами x , y и z или радиус-вектором r , проведенным из начала системы координат в данную точку (рис.1). Рис. 1.1. При движении материальной точки её координаты с течением времени изменяются. В общем случае её движение определяется скалярными уравнениями x = x(t ) , y = y (t ) , z = z (t ) , (1.1) или векторным уравнением r = r (t ) (1.2) Уравнения (1.1) и (1.2) называются кинематическими уравнениями движения материальной точки. Траектория движения материальной точки – линия, описываемая этой точкой в пространстве. В зависимости от формы траектории движение может быть прямолинейным или криволинейным. Рассмотрим движение материальной точки вдоль произвольной траектории (рис.2). Рис. 1.2. Длина участка траектории AB , пройденного материальной точкой, называется длиной пути ∆s и является скалярной функцией времени: ∆s =∆s (t ) . Вектор ∆r = r2 − r1 , проведенный из начального положения движущейся точки в положение её в данный момент времени, называется перемещением. 3. Скорость. Для характеристики движения материальной точки вводится векторная величина – скорость, которая определяется как быстрота движения, так и его направление в данный момент времени. Пусть материальная точка движется по какой-либо криволинейной траектории так, что в момент времени t ей соответствует радиус-вектор r1 (рис. 1.2). В течение небольшого промежутка времени ∆t точка пройдёт путь ∆s и получит элементарное (бесконечно малое) приращение ∆r . Вектором средней скорости v называется отношения приращения ∆ r радиус-вектора точки к промежутку времени ∆t : ∆r . v = ∆t Направление вектора средней скорости совпадает с направлением ∆ r . скорость стремится к При неограниченном уменьшении ∆t средняя предельному значению мгновенной скорости v : ∆r d r = = v lim ∆t →0 ∆t dt (1.3) Скорость v , таким образом, есть векторная величина, равная первой производной радиус-вектора движущейся точки по времени. Вектор скорости v направлен по касательной к траектории в сторону движения (рис. 1.1.3) Мал. 1.1.3 По мере уменьшения ∆t путь ∆s всё больше будет приближаться к ∆ r , поэтому модуль скорости ∆ r ∆r ∆s ds = = v v lim = lim = = lim ∆t →0 ∆t ∆t →0 ∆t ∆t →0 ∆t dt (1.4) Таким образом, модуль мгновенной скорости равен первой производной пути по времени: v= ds dt (1.5) При неравномерном движении модуль мгновенной скорости с течением времени изменяется. В данном случае пользуются скалярной величиной v средней скоростью неравномерного движения: v = ∆s . ∆t 4. Ускорение и его составляющие В случае неравномерного движения важно знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является ускорение. Ускорением материальной точки в момент времени t есть предел ∆v d v = = a lim ∆t →0 ∆t dt Ускорение (рис. 1.3) можно представить, как сумму двух составляющих. Рис. 1.3. Тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю, направлена по касательной к траектории: ∆v dv = aτ lim = ∆t →0 ∆t dt Нормальная составляющая ускорения определяет быстроту изменения скорости по направлению, направлена к центру кривизны траектории с радиусом R : v2 . an = R dv Тогда = ,a = aτ + a n = a dt aτ + an . 5. Угловая скорость и угловое ускорение. Рассмотрим твёрдое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R (рис. 1.4). За время ∆t точка пройдёт путь ∆s , повернувшись вместе с телом на угол ∆ϕ . Угловой скоростью называется векторная величина, равная первой производной угла поворота по времени: ∆ϕ d ϕ . = ω lim = ∆t →0 ∆t dt Модуль вектора d ϕ равен углу поворота, а его направление совпадает с направлением поступательного движения буравчика, ручка которого вращается в направлении движения точки по окружности (правило правого винта). Рис. 1.4. Рис. 1.5 Вектор ω направлен вдоль оси вращения по правилу правого винта, т.е. так же, как и вектор d ϕ (рис. 1.5). Размерность угловой скорости – радиан в секунду (рад/с). Линейная скорость точки ∆s ∆ϕ R∆ϕ = = lim= R lim = Rω , v lim ∆t →0 ∆t ∆t →0 ∆t ∆t →0 ∆t т.е. v = Rω . Если ω = const , то вращение равномерное и его можно характеризовать периодом вращения T - временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2π . Так как промежутку времени ∆t =T 2π , откуда соответствует угол ∆ϕ = 2π , то ω = T T= 2π ω . Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения: 1 ω , = T 2π n= откуда ω = 2π n . Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени: dω . ε= dt dv d (ω R) dω = = R = Rε . dt dt dt 2 2 v (ω R) Нормальная составляющая ускорения a= = = ω2R . n R R Таким образом, связь между линейными (длина пути s , пройденного точкой по дуге окружности радиуса R , линейная скорость v , тангенциальное ускорение aτ , нормальное ускорение an ) и угловыми величинами (угол поворота ϕ , угловая скорость ω , угловое ускорение ε ) выражается следующими формулами: Тангенциальная составляющая ускорения a= τ s = Rϕ , v = Rω , aτ = Rε , an = ω 2 R .