УДК 517.958: 629.423 ОПТИМАЛЬНОЕ ПРОЕКТИРОВАНИЕ ЭЛЕКТРОМАГНИТА КАК ЭЛЕМЕНТА СИСТЕМЫ ЭЛЕКТРОМАГНИТНОГО
реклама

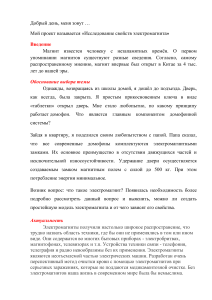
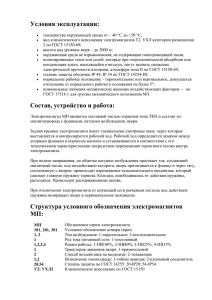
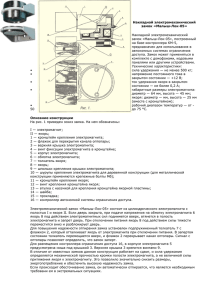
УДК 517.958: 629.423 ОПТИМАЛЬНОЕ ПРОЕКТИРОВАНИЕ ЭЛЕКТРОМАГНИТА КАК ЭЛЕМЕНТА СИСТЕМЫ ЭЛЕКТРОМАГНИТНОГО ПОДВЕСА НАЗЕМНОГО ТРАНСПОРТА С МАГНИТНОЙ ЛЕВИТАЦИЕЙ ЭКИПАЖА Ю.А. Бахвалов, В.В. Гречихин, А.Л. Юфанова Южно-Российский государственный политехнический университет (НПИ) имени М.И. Платова, г. Новочеркасск, ул. Просвещения, 132, vgrech@mail.ru Предложен алгоритм оптимального проектирования электромагнитов системы электромагнитного подвеса наземного транспорта с магнитной левитацией минимальной массы с применением методологии, основанной на решении обратных задач теории стационарных магнитных полей. Приведен пример применения алгоритма для определения параметров конкретного электромагнита. Ключевые слова: электромагнит, обратная задача, минимизация, алгоритм, математическое моделирование Ученые и специалисты многих стран ведут поиски экологически чистых, бесшумных, экономичных вариантов транспорта. Одним из направлений в развитии транспортных систем является замена в железнодорожном транспорте узла «колесо – рельс» бесконтактным электромагнитным подвесом [1 – 4]. Принципиальная схема системы электромагнитного транспорта приведена на рис. 1 [5]. К электромагниту предъявляются следующие требования: обеспечить необходимую подъемную силу; иметь минимальную массу, обеспечить эффективную работу автоматического устройства управления (АУУ), что достигается ненасыщенными ферромагнетиками (сердечником и феррорельсом). Таким образом, при проектировании электромагнита необходимо обеспечить выполнение следующих критериев: подъемная сила Fл должна быть равна заданной F*; магнитная индукция в зазоре B не должна превышать 0,7 Тл (при этом ферромагнитные части устройства будут работать на практически линейном участке кривой намагничивания; масса электромагнита Mэ должна быть минимальна. 1 4 2 5 3 Рис. 1. Функциональная схема системы электромагнитного подвеса: 1 – феррорельс; 2 – электромагнит; 3 – катушка; 4 – датчики зазора ; 5 – устройство автоматического управления с источником питания Особенность конструкции электромагнита позволяет выполнить все требования последовательно, так как магнитная индукция B определяется намагничивающей силой Iw катушки и зазором ; подъемная сила Fл при заданной магнитной индукции в зазоре определяется площадью полюсов; минимизация массы может быть обеспечена путем применения необходимых и достаточных условий существования экстремума при постоянной намагничивающей силе и площади полюсов. В работе предложен алгоритм оптимального проектирования наиболее рациональной конструкции (рис. 2) с применением методологии, основанной на решении обратных задач теории стационарных магнитных полей [6, 7]. Предварительно определяются приближенно основные параметры устройства. На основании формулы Fл* 3B2 Sп kв 20 , задавая L , находим a 0 20 Fл* B2kв 2L. Здесь kв – коэффициент, учитывающий выпучивание магнитного потока; Sп – площадь полюса. Намагничивающую силу определим из выражения Iw0 2B 0 . В приведенных выше формулах считаем известными , Fл* , B . На первом этапе алгоритма оптимального проектирования минимизируем критерий J 1k Iwk Bk B* . 2 При этом решается последовательность прямых задач расчета магнитного поля. После определения намагничивающей силы Iw, переходим ко второму этапу – минимизации критерия J 2k a k Fлk Fл* . 2 a/2 b h a/2 y z L a a/2 l 0 x Рис. 2. Сечение электромагнита Сила Fлk определяется на каждой итерации в результате расчета магнитного поля. На третьем этапе минимизируем массу электромагнита (без учета феррорельса) (1) M эм a(2h l ) a 2 Lст 2Sкат Lм при ограничении hl S кат k з . Здесь ст, м – плотности ферромагнетика (стали) и меди соответственно; k з – коэффициент заполнения окна катушки по меди; Sкат – площадь окна катушки. Подставляя l S кат k з h в выражение (1), найдем h* , а затем и l * , при которых M эм h* , l * min2 M эм h, l . h ,l R При минимизации на первом и втором этапах использовался метод градиентного спуска. Минимизация Mэм осуществлялась с использованием условий d 2 M эм dM эм 0. 0; dh2 dh Предложенный алгоритм использовался для определения оптимального электромагнита, если: Fл* 20 ; B* 0,7 Тл; k з 0,7 ; k в 1,2 1,5 ; L 1 м; 0,015 м. В результате на четвертой итерации получено: Iw4 14 кА; a 4 63 м h 4 0,080 м; l 4 0,048 м; b 4 0,242 м. Выводы 1. Предложен достаточно строго обоснованный эффективный итерационный алгоритм проектирования электромагнитов систем магнитной левитации минимальной массы. 2. Алгоритм основан на решении условно корректных обратных задач. 3. Алгоритм может быть использован при проектировании подобных устройств в электроаппаратостроении. Результаты работы получены при поддержке Минобрнауки РФ в рамках государственного задания на проведение НИОКР, шифр заявок 2819 и 1.2690.2014/K. Литература 1. Проблемы высокоскоростного наземного транспорта / Под ред. Ю.А. Бахвалова // Изв. вузов. Электромеханика (спец. выпуск). 1983. № 2. 132 с. 2. Проблемы высокоскоростного наземного транспорта / Под ред. Ю.А. Бахвалова // Изв. вузов. Электромеханика (спец. выпуск). 1985. № 1. 132 с. 3. Бахвалов Ю.А., Серебряков В.И., Морозова О.И. Выбор области параметров силовых элементов системы электромагнитного подвеса // Изв. вузов. Электромеханика. 1986. № 9. С. 33-38. 4. Бахвалов Ю.А., Бочаров В.И., Винокуров В.А., Нагорский В.Д. Транспорт с магнитным подвесом. М: Машиностроение, 1991. 320 с. 5. Бочаров В.И., Бахвалов Ю.А., Талья И.И. Основы проектирования электроподвижного состава с магнитным подвесом и линейным тяговым электроприводом. Ч.1. Ростов н/Д.: Изд-во Рост. ун-та, 1992. 432 с. 6. Бахвалов Ю.А., Горбатенко Н.И., Гречихин В.В. Обратные задачи электротехники. Новочеркасск: Изд-во журнала «Известия вузов. Электромеханика». 2014. 211 с. 7. Бахвалов Ю.А., Гречихин В.В., Юфанова А.Л. Расчет и оптимизация электромагнитов систем левитации и боковой стабилизации наземного транспорта с магнитным подвесом на основе решения обратных задач// Методы и алгоритмы прикладной математики в технике, ме- дицине и экономике: материалы 15-ой Междунар. науч.-практ. конф., г. Новочеркасск, 20 марта 2015 г. / Юж.-Рос. гос. политехн. ун-т (НПИ) имени М.И. Платова. – Новочеркасск: ЮРГПУ(НПИ), 2015. – 45 с. OPTIMAL DESIGN OF AN ELECTROMAGNET AS AN ELEMENT SYSTEM OF THE ELECTROMAGNETIC SUSPENSION OF SURFACE TRANSPORT WITH MAGNETIC LEVITATION OF THE CREW. Y.A. Bachvalov, V.V. Grechikhin, A.L. Yufanova The Platov South-Russia State Polytechnic University (NPI), Novocherkassk, Prosveshenija, 132, vgrech@mail.ru Abstract. The article describes the algorithm the optimal design of the electromagnets of the system electromagnetic suspension of surface transport with magnetic levitation of minimum mass with the use of a methodology based on the solution of inverse problems of the theory of stationary magnetic fields. The example of applying the algorithm for determining parameters of the particular of the electromagnet is given. Keywords: electromagnet, inverse problem, minimization, algorithm, mathematical modeling