1.2. Скорость и ускорение
реклама

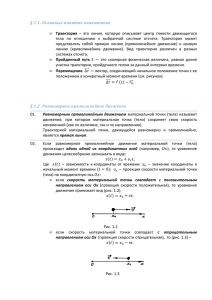
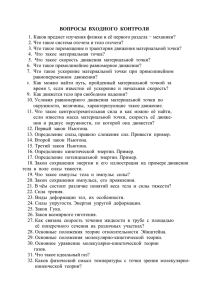
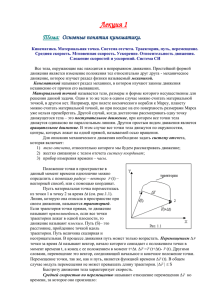
Тема 1. Кинематика материальной точки и колебательного движения §1.1. Основные понятия Механика – раздел физики, изучающий закономерности механического движения тел и причины, вызывающие (или изменяющие) его. Механическое движение – процесс изменения с течением времени взаимного расположения тел или частей тела относительно друг друга. Кинематика – раздел физики, изучающий механическое движение тел, безотносительно к причинам, вызывающим это движение. Классическая (нерелятивистская) механика или механика Ньютона – нерелятивистская теория движения макроскопических объектов. Нерелятивистская теория – теория движения тел со скоростями , гораздо меньшими скорости света с : c . Основная задача кинематики (механики) состоит в определении положения и скорости движущейся материальной точки (тела) в произвольный момент времени. Материальная точка – модель реального тела: 1) размеры которого стремятся к нулю, говорят: материальная точка не имеет размеров, 2) имеет не равную нулю массу. В конкретной задаче материальной точкой можно считать тело, размеры которого много меньше, чем расстояния между телами, или размеров области, в которой происходит движение. Абсолютно твердое тело – тело, расстояние между любыми точками которого всегда остается неизменным. Такое тело не способно деформироваться, но под действием внешних сил в нем могут возникать внутренние напряжения, силы упругости и давления. Поступательным движением называют движение, при котором любая прямая, проведенная в теле остается параллельной сама себе. Для указания положения материальной точки в пространстве и описания изменения этого положения во времени вводят систему отсчета. Система отсчета – совокупность: 1) тела отсчета (тела, по отношению к которому определяется положение некоторой материальной точки); 2) системы координат с началом отсчета в точке, выбранной на теле отсчета, 3) часов – прибора для отсчета времени. Можно говорить, что система отсчета представляет собой систему координат, жестко связанную с телом отсчета и часы. Радиус-вектор r материальной точки – это вектор, проведенный из начала координат системы отсчета к этой материальной точке. Наиболее часто при решении задач на плоскости вводят декартовы прямоугольные координаты x, y и полярные координаты r, ; в трехмерном пространстве – декартовы прямоугольные x, y, z , цилиндрические z, r, и сферические r,, системы координат. В декартовой системе координат координаты x, y, z материальной точки М определяют как проекции радиус вектора r этой точки на соответствующие оси системы координат. Взаимосвязь названных систем координат иллюстрируют приведенные ниже рисунки. Рис.1.1а. Декартовы x, y и полярные r , , x r cos координаты . y r sin Рис.1.1б. Соответствие декартовых x, y, z и цилиндрических r , , z x r cos координат y r sin . z z Рис.1.1б. Соответствие декартовых x, y, z и сферических r,, x r sin cos координат y r sin sin . z r cos Движение материальной точки в пространстве сопровождается изменением ее координат (и ее радиус-вектора) с течением времени. Процесс движения может быть описан системой уравнений, представляющей собой параметрическое уравнение траектории: x xt y y t , z z t (1.1) r r t , (1.2) или уравнением для радиус-вектора: где радиус вектор r x, y, z . Траектория материальной точки может быть определена следующими способами: 1) линия, вдоль которой движется материальная точка (центр масс материального тела) в данной системе отсчета, 2) геометрическое место концов радиус-векторов материальной точки. Уравнение траектории в явном виде, как уравнение, связывающее между собой пространственные координаты движущейся материальной точки, может быть получено исключением времени из системы уравнений (1.1). Путь (длина пути) – скалярная величина численно равная длине участка траектории, пройденного материальной точкой от начального положения C до конечного B (рис.1.2). Рис.1.2. АСВ - траектория движения материальной точки, r0 и r1 - её начальный и конечный радиус-векторы, r S - вектор перемещения. Перемещение – вектор S направленный из начального положения движущейся материальной точки в ее конечное положение. Вектор перемещения S можно определить как приращение r радиус-вектора материальной точки: S r r1 r0 . Рисунок 1.2 позволяет сделать вывод, что модуль вектора перемещения совпадает с длиной пройденного пути лишь при прямолинейном движении. §1.2. Скорость и ускорение Изменение положения материальной точки в пространстве с течением времени характеризуют с помощью скорости. В физике используется понятие "скорость" используется в нескольких различных смыслах. Средняя скорость движения – векторная величина, равная отношению вектора перемещения материальной точки S r ко времени t , за которое это перемещение произошло: CP r S t t (1.3) Формальное, количественное определение каждой новой физической величины требует установления ее физического смысла, позволяющего с той или иной степенью наглядности представить конкретную ситуацию. Физический смысл величин устанавливается по определенной схеме. Так, если в формуле (1.3) для средней скорости положить t 1c , то она принимает вид: CP S . Поэтому, средняя скорость показывает, какое перемещение совершает материальная точка за единицу времени. Последнее равенство указывает также, что вектор средней скорости CP направлен вдоль вектора перемещения S . Соотношение (1.3) позволяет установить размерность единицы измерения скорости. Для этого в определение величины подставляют (не обращая внимания на векторный характер записи) размерность всех входящих величин: CP r м м . t с с Единица скорости – есть скорость такого движения, при котором материальная точка за одну секунду проходит расстояние в 1 метр. Мгновенная скорость – скорость материальной точки в данный момент времени, в данной точке траектории. Количественное определение мгновенной скорости требует дополнительных рассуждений. Средняя скорость, характеризует движение в целом, и не является его детальной характеристикой. Мгновенную скорость можно определить путем предельного перехода в соотношении (1.3) при t 0 : r . t 0 t lim CP lim t 0 Из курса математического анализа известно, что такой предел представляет собой первую производную радиус-вектора r по времени t : lim t 0 r dr . t dt Таким образом: Мгновенная скорость – векторная физическая величина, равная первой производной радиус-вектора r материальной точки по времени: dr dt (1.4) Из приведенных определений следует, что в общем случае вектор средней скорости CP направлен вдоль перемещения S r , т. е. вдоль секущей – линии, проходящей через начальное и конечное положения движущейся точки. Из курса математического анализа известно, что в пределе, при t 0 , когда r 0 , секущая некоторой кривой совпадает с касательной к ней, поэтому мгновенная скорость направлена по касательной к траектории. Мгновенная скорость , как и средняя, показывает, какое перемещение совершила бы движущаяся материальная точка за единицу времени, обладая постоянной скоростью . Средняя путевая скорость – скалярная величина, равная отношению всего пути, пройденного материальной точкой, ко всему времени движения, т. е. к промежутку времени, за который этот путь был пройден: CP S . t (1.5) Очевидно, мгновенная скорость движения материальной точки может меняться во времени. Характеристикой такого изменения служит ускорение. Среднее ускорение равно отношению изменения скорости к промежутку времени t , за которое это изменение произошло: 2 1 aCP . t t2 t1 (1.6) Положив в этом определении t 1c , легко понять, что среднее ускорение показывает, на сколько изменилась скорость за единицу времени. Измеряется ускорение в следующих единицах: м м aCP 2 1 с 2 . t2 t1 t с с Ускорение, подобно скорости, может изменяться с течением времени. Мгновенное ускорение – это ускорение материальной точки в данный момент времени, в данной точке траектории. Проводя рассуждения, как при определении мгновенной скорости, можно сделать вывод, что: Ускорение – векторная физическая величина равная первой производной скорости материальной точки по времени или, соответственно, второй производной ее радиус-вектора по времени: a d d dr d 2 r . dt dt dt dt 2 (1.7) Положив в соотношении (1.7) промежуток времени dt 1c , получим a d , что позволяет понять физический смысл ускорения. Ускорение показывает, на сколько изменяется скорость за единицу времени. §1.3. Классический закон сложения скоростей Пусть некоторая система K X , Y , Z , O движется равномерно и прямолинейно относительно другой, неподвижной системы K X ,Y , Z , O , со скоростью 0 . Рис.1.3. К преобразованию скоростей. Как видно из рисунка 1.3, справедливо равенство: r R r, (1.8) где r – радиус-вектор точки M в неподвижной системе отсчета, r – радиус вектор точки M в подвижной системе отсчета K и R – радиус-вектор начала подвижной системы отсчета относительно неподвижной. Если предположить, что в начальный момент времени начала координат систем K и K совпадают, то вектор R 0t . С учетом последнего замечания дифференцирование (1.8) по времени дает 1 0 . (1.9) Формула (1.9) – математическое выражение классического закона сложения скоростей, где – скорость материальной точки M относительно неподвижной СО, 1 – скорость точки M относительно подвижной СО и 0 – скорость подвижной СО относительно неподвижной. В проекциях на оси координат X , Y , Z (1.9) записывается так: X 1 X 0 X Y 1Y 0Y 1Z 0Z Z t t Последнее уравнение системы выражает (1.10) представление об абсолютном времени, которое течет равномерно и одинаково во всех инерциальных системах отсчета.