Проект технических требований к комплексной системы
реклама

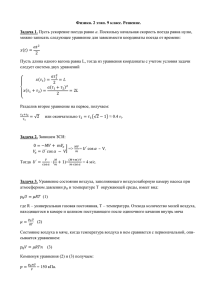
ПРОЕКТ 1.Назначение комплексной системы безопасности движения поездов. Системы обеспечения безопасности движения давно стали обязательными для Комплексная система безопасности движения поездов (КСБДП) Поездные устройства. Основные технические требования. электроподвижного состава метрополитена и предназначены для обеспечения безопасной эксплуатации поездов на линиях метрополитена. Основой этих систем являются устройства автоматической локомотивной сигнализации (АЛС) с автоматическим регулированием скорости АЛС-АРС, обеспечивающие следующие основные функции безопасности: Прием и дешифрирование кодированных сигналов АЛС и формирование индикации о предельно допустимой скорости движения; непрерывный контроль за соблюдением предельно допустимой скорости и автоматическое торможение при ее превышении поездом. Таким образом, обеспечение безопасности движения сводилось к формированию допустимой скорости движения и контролю за соблюдением фактической скорости поезда заданной по АЛС допустимой скорости движения. В настоящее время, современные достижения в технике, позволяют расширить функциональные возможности систем обеспечения безопасности движения, обеспечить их более надежную работу и, как следствие, сделать эксплуатацию подвижного состава более безопасной. В частности, к числу таких возможностей можно отнести: введение функции самодиагностики устройств безопасности. При этом, в сочетании с возможностью резервирования устройств безопасности обеспечивается более высокая надежность их работы и безопасность движения; обеспечение функциональной безопасности устройств. Под функциональной безопасностью устройств надо понимать отсутствие возможности опасного отказа устройств в результате которого может происходить нарушение безопасности движения. Для этого все модули, формирующие данные непосредственно влияющие на безопасность движения, должны иметь в своем составе независимые каналы, осуществляющие параллельную обработку информации. При рассогласовании информационных потоков и сформированных управляющих команд должна формироваться команда на торможение с признаком неисправности устройств; возможность диагностики тепловых узлов по измеренной температуре. Это позволит обнаружить на ранней стадии возникающие в них неисправности. возможность унификации системы и обеспечения ее работоспособности для различного числового кодирования сигналов АЛС, применяемого на Московском метрополитене: «1/4»; «1/5»; «2/6»; АРС с ДАУ АРС; Возможность введения функции определения местоположения подвижного состава на линии и на ее основе обеспечить контроль за соблюдением установленных ограничений скорости, прицельную остановку поезда у сигнального знака «Остановка первого вагона» и блокировку открытия дверей на станции с противоположной от платформы стороны; возможность управления подвижным составом в автоматическом режиме без участия машиниста (локомотивной бригады) – режим автоведения; Регистрацию параметров движения поезда и на ее основе контроль за состоянием оборудования, действиями локомотивных бригад и ремонтного персонала. Объединение и реализация перечисленных выше функций конструктивно в одной системе придает ей свойство комплексности и определяет ее как комплексную систему безопасности движения. Таким образом, комплексная система безопасности должна включать в себя: - подсистему АЛС-АРС; - подсистему измерения скорости; - подсистему автоведения; - подсистема определения местоположения поезда; - модуль диагностики и регистрации параметров движения. 2. Требования по обеспечению безопасного функционирования комплексной системы безопасности движения поездов (КСБДП). Безопасное функционирования КСБДП основывается на следующих обязательных требованиях: 1. Дублирование работы структурных элементов системы. Конструктивно это обеспечивается наличием независимых каналов приема и обработки информации и формирования управляющих команд. 2. Параллельная обработка информации в независимых каналах. 3. Встроенный контроль работоспособности структурных элементов входящих в состав КСБДП. 4. Применение алгоритмов обработки информации, исключающих формирование ошибочных управляющих команд. 5. Применение конструктивных решений и технологий изготовления устройств, обеспечивающих повторяемость изделия его эталону в процессе производства. 6. Сертификационный входной контроль компонентов системы и системы в целом на соответствие установленным требованиям и нормативной документации. 3. Требования к техническим характеристикам 3.1. Допустимый диапазон напряжения питания сети постоянного тока должен быть от 52 до 90 В при номинальном значении 75 В. 3.2. Допустимая пульсация входного напряжения питания должна составлять не более 10% 3.3. Время непрерывной работы изделия должна составлять не менее 20 ч. 3.4. Изделие должно обеспечивать прием из рельсовых цепей кодовых сигналов автоматической локомотивной сигнализации (КС АЛС) в виде синусоидальных сигналов с частотами: 75 Гц; 125 Гц; 175 Гц; 225 Гц; 275 Гц; 325 Гц.* Любая другая частота, отличающаяся от указанных на ± 20 Гц и более не должна восприниматься как сигнальная частота КС АЛС. 3.5. Чувствительность приемного канала по току в рельсовых цепях на указанных частотах должна составлять: * Табл.1 Номинальная частота приемника Ток чувствительности на номинальной +/- 1 Гц частоте, А 75 3.3 +/- 0,2 125 2,1 +/- 0,1 175 1,5 +/- 0,1 225 1,1 +/- 0,1 275 1,0 +/- 0,1 325 0,8 +/- 0,1 3.6. При приеме КС АЛС, образуемых сигналами с номинальными частотами, указанными в п.3.4, изделие должно дешифрировать их в значения допустимых скоростей и формировать выходные сигналы индикации допустимых скоростей в соответствии с Табл.2 для КС АЛС «2/6» и Табл.3 для КС АЛС «1/5»* Табл. 2 для устройств АЛС-АРС, работающих в режиме 2-х частотного кодирования - КС АЛС «2/6» № Сигнальная частота, Допустимая Сигнал индикации КС Гц скорость, км/ч допустимой скорости АЛС основная предупреди- основная ожидаемая основной предупредительной тельная 16 75 325 80 80 Л Л «РС» «80» 26 125 325 70 70 Л Л «РС» «70» 36 175 325 60 60 Л Л «РС» «60» 46 225 325 40 40 Л Л «РС» «40» 12 75 125 80 70 Л Л «70» «80» 13 75 175 80 60 Л Л «60» «80» 14 75 225 80 40 Л Л «40» «80» 15 75 275 80 0 Л Л «0» «80» 23 125 175 70 60 Л Л «60» «70» 24 125 225 70 40 Л Л «40» «70» 25 125 275 70 0 Л Л «0» «70» 34 175 225 60 40 Л Л «40» «60» 35 175 275 60 0 45 225 275 40 0 56 275 325 0 0 1 75 - 40 - 2 125 - 40 - 3 175 - 40 - 4 225 - 40 - 5 275 - 0 - 6 325 - 40 - - - - 0 - Л «60» Л «40» Л «0» Л «40» Л «40» Л «40» Л «40» Л« 0» Л «40» Л «ОЧ» Л «0» Л «0» Л «0» - Табл.3 для устройств АЛС-АРС, работающих в режиме одночастотного кодирования – КС АЛС «1/5» № Сигнальная частота, Гц Допустимая скорость, Сигнал индикации КС км/ч допустимой скорости АЛС 1. 75 80 Л «80» 2. 125 70 Л «70» 3. 175 60 Л «60» 4. 225 40 Л «40» 5. 275 0 Л «0» 6. 325 0 Л «ОЧ» 7. 0 Л «ОЧ» *Примечания: 1) при приеме только одной из двух сигнальных частот 75, 125, 175, 225 или 325 Гц для устройств АЛС-АРС, работающих в режиме 2-х частотного кодирования устанавливается основная допустимая скорость 40 км/ч с формированием сигнала индикации допустимой скорости Л «40» (см. № КС АЛС 1,2,3,4,5,6); 2) при приеме двух и более сигнальных частот для числового кодирования КС АЛС 1/5 должна устанавливаться допустимая скорость 0 с формирование индикации Л «ЧЗ» (числовая защита). Для систем с числовым кодированием КС АЛС 2/6 устанавливаться допустимая скорость 0 с формирование индикации Л «ЧЗ» (числовая защита) при приеме трех и более сигнальных частот; 3) кодовый сигнал КС АЛС 46 одновременно является задающим направление движения и формирует дополнительно к указанной в Табл.2 сигнализации сигнал индикации Л «Н»; 4) указанные в п. 3.4, п.3.5, п.3.6 требования применимы для действующих на настоящее время линий. Для линий метрополитена, планируемых на будущее, могут быть приняты иные технические решения по системе кодирования сигналов автоматической локомотивной сигнализации и иное формирование допустимых скоростей. 3.7. Время переключения с одного кодового сигнала КС АЛС на другой кодовый сигнал КС АЛС должно оставлять не более 0,1с. 3.8. Изделие не должно реагировать на отсутствие КС АЛС в течение времени: - для системы кодирования сигналов КС АЛС 1/5 – (0,5 ± 0,1)с; - для системы кодирования сигналов КС АЛС 2/6 - (1,2 ± 0,1)с. 3.9. Изделие должно иметь защиту от гармоник сетевого и обратного тягового тока, частоты которых совпадают с сигнальными частотами АЛС. 3.10. Изделие должно обеспечивать прием скоростных сигналов от двух независимых измерителей скорости и их обработку независимыми каналами с определением фактической скорости подвижного состава. 3.11. Время задержки на включение экстренного торможения, измеряемое с момента отсутствия сигнала контроля эффективности торможения, должно составлять: - (3,2 – 3,4) с - при фактической скорости поезда меньше 10км/ч или больше 30км/ч; - (5,4 – 6,0) с - при фактической скорости поезда в пределах от 10 до 30 км/ч. 3.12. Изделие должно формировать сигналы индикации и включать индикацию на пульте управления машиниста: - индикация заданного направления – «ЛН»; - индикация эффективности контроля торможения – «ЛКТ»; - индикация выключения двигателей – «ЛКВД»; - индикация включения двигателей – «ЛВД»; - индикация числовой защиты - «ЧЗ» - индикация допустимой и предупредительной скоростей АЛС – «80»; «70»; «60»; «40»; «0»; «ОЧ»; - индикация перегрева тепловых узлов. 3.13. Время выдержки на включение торможения в случае противоскатывания должно составлять (7-9)с. 4.Основные функции комплексной системы безопасности движения поездов. 4.1. Подсистема АЛС-АРС должна обеспечивать: 4.1.1. Прием и дешифрирование кодовых сигналов АЛС-АРС и формирование допустимой скорости движения в каждый момент времени. Различные комбинации частотных сигналов соответствуют определенным допустимой и предупредительной скоростям. Для действующих линий прием, дешифрирование и формирование допустимых и предупредительных скоростей должно производится в соответствии с Табл.2, Табл.3. Для линий, строительство которых планируется на будущее, могут быть приняты иные принципы кодирования, дешифрирования и формирования допустимых скоростей. 4.1.2. Формирование в кабине управления сигнализации о допустимой и предупредительной скорости с указанием их значений. При отсутствии приема кодовых сигналов АЛС должна формироваться допустимая скорость «0» км/ч и индикация «ОЧ» («отсутствие частоты»). 4.1.3. Формирование признака «Направление движения» при его задании стационарными устройствами АЛС-АРС и индикацию заданного направления движения. Признак направления фиксирует головной вагон и определяет правильное направление движения- по ходу вперед. 4.1.4. Ограничение скорости до 20км/ч. в случае отсутствия признака заданного направления. Движение должно быть возможным только при постоянном подтверждении машинистом бдительности (постоянное нажатие КБ или ПБ). 4.1.5. Ограничением скорости до 20км/ч при движении в направлении противоположном относительно заданного. Движение должно быть возможным только при постоянном подтверждении машинистом бдительности (постоянное нажатие КБ или ПБ). 4.1.6. Непрерывное сравнение и контроль соответствия допустимой по АЛС и фактической скорости поезда. 4.1.7. Формирование команды на торможение при превышении фактической скорости движения поезда(Vфакт.) заданной допустимой по АЛС с возможностью ее отмены при подтверждении машинистом бдительности (кратковременное нажатие ПБ или КБ) и снижении скорости до заданной АЛС допустимой скорости. 4.1.8. Контроль бдительности машиниста при торможении от устройств АЛС-АРС в случае превышения фактической скорости допустимой по АЛС. При отсутствии подтверждения бдительности, системой должна формироваться неотменяемая команда на торможение до полной остановки поезда. 4.1.9. Контроль эффективности торможения (функция «Контроля тормоза») при включении режима торможения от АРС. При не эффективном торможении должно быть обеспечено включение экстренного торможения с обеспечением тормозного пути в соответствии с требованиями ПТЭ. 4.1.10. Прием и отработку сигнала Абсолютной остановки «АРС–АО» с формированием в кабине управления индикации о его приеме. Сигнал «Абсолютная остановка» формируется стационарными устройствами АЛС-АРС и представляет собой чередование импульсов сигнала частоты F=275Гц (допустимая скорость «0») и пауз («ОЧ») с регулируемым интервалом времени. 4.1.11. Неотменяемое торможение и исключение возможности ходового режима в течение всего времени воздействия на подвижной состав сигнала АРС-АО. 4.1.12 Формирование команды на торможение при приеме большего, чем определено составом кодовых сигналов АЛС, числа частотных сигналов (функция «Числовой защиты») с включением индикации «Ч.З.». Отмена торможения с последующим ограничением скорости до 20км/ч производится при постоянном нажатии педали бдительности или кнопки бдительности. 4.1.13. Формирование команды на торможение при скатывании подвижного состава (функция «Противоскатывания»). 4.1.14. Формирование команды «тормоз удержания» в момент остановки поезда. 4.1.15. Формирование команды на торможение при неисправности устройств, приводящей к нарушению их работоспособности. 4.1.16. Формирование команды на торможение при отсутствии сигнала АЛС (восприятие «ОЧ») с возможностью ее отмены при нажатии педали бдительности или кнопки бдительности и ограничением скорости до 20км/ч. 4.1.17. Возможность ручного переключения в режим ограничения скорости при неисправности устройств АЛС-АРС. При этом, ограничение скорости должно составлять до 20 км/ч при условии подтверждения машинистом бдительности постоянным нажатием КБ или ПБ. 4.1.18. Невозможность движения при выключенных устройствах АЛС-АРС. 4.1.19. Должна быть обеспечена безотказность подсистемы АЛС-АРС при работе на линии. 4.2. Подсистема измерения скорости должна обеспечивать: 4.2.1. Измерение фактической скорости поезда по двум независимым каналам с отображением значения ее величины на пульте управления машиниста; 4.2.2. Формирование скоростных сигналов и передачу их в подсистемы АЛС-АРС и автоведения; 4.2.3. Диапазон измерения скорости от 0 до 99км/ч, погрешность измерения ±1км/ч. 4.3.Подсистема определения местоположения состава должна обеспечивать: 4.3.1. Контроль не проезда станции (функция «контроля не проезда станции») с обеспечением прицельной остановки поезда на стации у знака «Остановка первого вагона» в случае, если машинист при въезде на станцию не предпринимает своевременные действия по остановке поезда; 4.3.2. Блокировку открытия дверей на станции с противоположной от платформы стороны; 4.3.3. Контроль за соблюдением установленных ограничений скорости. В случае превышения фактической скорости установленного ограничения скорости формируется команда на торможение с возможностью ее отмены при подтверждении машинистом бдительности кратковременным нажатием КБ или ПБ и снижения фактической скорости до установленного значения. 4.3.4. Контроль расстояния между впереди и вслед идущими поездами и, в случае, если расстояние между ними становится менее расчетного тормозного пути, должен формироваться признак «опасное сближение» с формированием команды торможения на вслед идущем поезде. 4.3.5. Передачу в диспетчерскую централизацию визуальной информации о расположении поездов на рельсовых цепях линии в виде условного графического отображения на дисплее и признака «опасное сближение» в случае, указанном в п.4.3.4 настоящего раздела. 5. Подсистема автоматизированного управления движением поездов (автоведение). Должна обеспечивать: 5.1. Автоматическое управление движением поезда на линии с обеспечением безопасности движения. 5.2. Остановку поездов на станциях и путях оборота с заданной точностью. 5.3. Автоматическое управление открытием и закрытием дверей на станции со стороны платформы и контроль их закрытого состояния в момент отправления и движения на линии. 5.4. Оптимальный режим ведения поезда с учетом профиля пути, заданными допустимыми скоростями движения по АЛС и временем хода по перегону в соответствии с заданным графиком движения. 5.5. Автоматизированный оборот составов на конечных станциях линии. 5.6. Невозможность автоматического приведения в движение поезда при запрещающем показании выходного светофора, а при обороте состава – при запрещающем показании маневрового светофора. 5.4. Возможность введения в подсистему автоведения графика движения в электронном виде. 5.5. Обеспечение в автоматическом режиме заданного графика движения с точностью +/- 2,0с. Автоматическая корректировка времени хода поездов по перегонам и стоянок на станциях при отклонении поезда от графика движения. 5.6. Возможность введения в подсистему автоведения электронной карты профиля пути. 5.7. Устройства автоведения должны иметь встроенный контроль работоспособности и технической диагностики на уровне входящих в систему модулей с отображением информации о состоянии устройств. 5.8. Автоматическое переключение на резервные устройства автоведения в случае неисправности основных. 5.9. Возможность ручного и дистанционного отключения устройств на поезде и переключения управления поездом с автоматического на ручной режим. 5.10. Конструкция устройств должна исключать возможность опасного ошибочного воздействия на управляющие цепи поезда, приводящего к нарушению безопасности движения. 5.11. Конструкция устройств должна исключать возможность отказов, в результате которых подсистема автоведения в целом становится не работоспособной. 6. Модуль регистрации параметров движения поезда (РПДП). 6.1. Модуль РПДП предназначен для регистрации параметров движения поезда, сохранения зарегистрированных данных в рабочих и аварийных ситуациях. 6.2. Принимаемые модулем РПДП данные должны регистрироваться (записываться) в энергонезависимой памяти накопителя. После первого заполнения всего объема памяти принимаемые данные должны вытеснять из накопителя наиболее раннее записанные данные, т.е. записываться на их место. 6.3. Временной объем накопителя должен составлять не менее 72 часов. 6.4. Продолжительность хранения зарегистрированной информации должна составлять не менее 1000 часов, при условии, что эта информация не вытесняется вновь поступающей, независимо от наличия питания регистратора. 6.5. Регистрируемые данные должны привязываться к заводскому номеру регистратора, номеру вагона на котором установлен регистратор, к времени события, а также к рельсовым цепям и станциям линии. В данные привязки ко времени должны входить следующие параметры: число месяца, номер месяца, последние две цифры текущего года, количество часов, минут и секунд. 6.6. Зарегистрированные данные за исключением времени хода часов (часы, минуты, секунды) должны быть недоступными для внесения в них изменений. 6.7. Должна обеспечиваться сохранность зарегистрированной информации после воздействия на регистратор аварийных факторов: - статической нагрузки 22кН, прилагаемой непрерывно в течение 5 минут по каждой из трех осей; - температуры плюс 800ºС в течение 1 часа; - пребывание в среде гидро и огнегасящих смесей в течение 1-го часа. 6.8. Изделие должно обеспечивать устойчивую работу в условиях электромагнитной обстановки вагонов метро. 6.9. Количество и перечень регистрируемых параметров определяются в процессе разработки. 7. Общие требования к комплексной системе безопасности движения поездов. Должны быть обеспечены: 7.1. Функциональная безопасность, исключающая возможность опасного отказа или сбоя в работе устройства, приводящего к нарушению безопасности движения. В случае нарушения функциональной безопасности устройства должны автоматически переключаться на резервные элементы или комплекты. 7.2. Функция самодиагностики на уровне функциональных модулей с представлением информации об их состоянии и регистрацией параметров работы составляющих систему устройств с определением неисправности на уровне модульных элементов. 7.3. Диагностика тепловых узлов с представлением машинисту информации о нагревании теплового узла выше средней температуры для всех аналогичных тепловых узлов на данном составе. 7.4 Защищенность устройств от несанкционированных воздействий. 8. Конструктивные требования. 8.1. Комплексная система безопасности должна иметь модульный принцип построения. 8.2. Устройства должны быть унифицированы и обеспечивать возможность работы на всех линиях во всех раннее принятых на метрополитене системах кодирования АЛС, в том числе и в режиме автоблокировки (режим АБ). 8.3. Иметь 100% резервирование с возможностью автоматического и ручного переключения на резервный комплект при неисправности основного комплекта. 8.4. Возможность переключения режимов работы устройств: АБ, 1/4, 1/5, ДАУ АРС, 2/6. 8.5. Устройства должны обеспечивать безотказную работу на линии. 8.6. Назначенный срок службы устройств не менее 15 лет с обеспечением приемственности элементной базы в течение указанного срока эксплуатации. 8.7. Ремонтопригодность на уровне модулей. Время восстановления работоспособности с учетом самодиагностики не более 1часа. 8.8. Требования по живучести и стойкости к внешним воздействиям: -степень защиты должна соответствовать группе IP50 ГОСТ 14254-80; - по стойкости к механическим воздействиям М25 по ГОСТ 17516.1-90; - вид климатического исполнения У2 по ГОСТ 15150-69 и быть работоспособно при воздействии окружающей среды с температурой от 258К(-15ºС) до 323К(+50ºС); - относительной влажности воздуха до 80% при температуре 298К(+25ºС); 8.9. Требования по электромагнитной совместимости: - изделие должно обеспечивать устойчивую работу в условиях электромагнитной обстановки вагонов метро; - изделие не должно создавать помехи на частотах поездной радиосвязи 2444, 2464 кГц и 470 МГц и не оказывать воздействие на работоспособность оборудования вагонов и устройств АРС; 8.10. Весогабаритные характеристики – минимально возможные. Уточняются в процессе разработки. 8.11. Требования к электрической безопасности: - изделие должно соответствовать классу 0 защиты человека от поражения электрическим током по ГОСТ12.2.007.0-75; - электрическое сопротивление изоляции цепей питания относительно корпуса должно быть не менее 20 Мом в нормальных климатических условиях. 8.12. Средняя наработка на отказ для одного полукомплекта должна составлять не менее 50 000 часов. 8.13. Требование к техническому осмотру и ремонту: 8.13.1. Плановое обслуживание - ежедневно по заходу в электродепо считывание информации о работоспособности устройств по результатам диагностики; 8.13.2. Проведение функциональной поверки после устранения неисправности устройств; 8.13.3. Плановый ремонт в рамках проведения ТР3, СР, КР вагона. Комплексная система безопасности движения поездов (КСБДП) Конструктивные требования. Модульный принцип построения Унификация устройств в части обеспечения возможности работы во всех принятых на метрополитене системах кодирования сигналов АЛС 100% резервирование Безотказность работы на линии КСБДП. Конструктивные требования Ремонтопригодность в эксплуатации на уровне модулей Время устранения неисправности по результатам диагностики не более 1 часа Должна обеспечиваться работоспособность устройств от постоянного напряжения в диапазоне 52 – 90В Степень защиты IP- 50 по ГОСТ 14254-80 Устойчивость к механическим воздействиям по М25 ГОСТ 17516.1-90 Вид климатического исполнения У2 по ГОСТ 1515069 с обеспечением работоспособности при температуре окружающей среды от 258К(-15ºС) до 323К(50ºС) Должна обеспечиваться устойчивая работа в условиях электромагнитной обстановки вагонов метро Не должно оказываться воздействие на работоспособность оборудования вагонов и стационарных устройств АРС Срок службы не менее 15лет Средняя наработка на отказ для одного полукомплекта должна составлять не менее 50 000 часов Комплексная система безопасности движения поездов (КСБДП). Конструктивные требования Модульный принцип пост Наличие независимых каналов приема и обработки Параллельная обработка информации в независимых каналах КСБДП. Конструктивные требования иинформации Встроенный контроль работоспособности и технической диагностики с отображением состояния устройств Применение алгоритмов обработки информации, исключающих формирование ошибочных команд Автоматическое и ручное переключение на резервные подсистемы Автоматическое управление движением поезда Возможность введения в подсистему автоведения электронного графика движения Обеспечение в автоматическом режиме заданного графика движения с точностью +/- 2,0с Возможность введения в подсистему автоведения электронного профиля пути Защищенность устройств от не санкционированных воздействий 9. Перечень сокращенных обозначений и назначение элементов системы КСБДП: Процессор Процессор формирует адреса и коды макрокоманд, определяющих режим работы устройств и производит диагностику исправности аппаратуры КСБДП. Приемник информации. Приемник информации обеспечивает преобразование входных сигналов и их передачу в процессор для дальнейшей обработки. В процессе обмена по внутри блочной шине CAN информация о входных сигналах поступает в процессор. Устройство ключей УК1, УК2, УК3, УК4. Принимает от процессора команды управления выходными ключами, управляющими вагонным оборудованием и передает обратно информацию о состоянии ключей. Устройство коммутации приемников сигналов АЛС (УКПС-АЛС). Устройство УКПС-АЛС предназначено для коммутации приемников сигналов АЛС на вход процессора или поездной линии связи ПЛС. Модуль регистрации параметров. Предназначен для регистрации всей входящей информации и всех формируемых блоками управляющих команд. Модуль диагностики. Предназначен для постоянного контроля за состоянием аппаратуры КСБДП, реализуется в центральных процессорах обоих полукомплектов. Результаты контроля передаются каждому ЦП в рамках межпроцессорного обмена. Таким образом, ведущий ЦП имеет информацию как об исправности своей аппаратуры, так и об исправности аппаратуры ведомого (резервного) полукомплекта. Модуль определения местоположения (МОМ). Определяет местоположение поезда на линии и на основании данных о местоположении и данных о координатах участков с установленным ограничением скорости осуществляется контроль соответствия фактической скорости поезда установленной скорости на данном участке. Кроме того, определяет необходимые параметры для реализации функции прицельной остановки поезда на станции у знака «Остановка первого вагона». Стационарные устройства АЛС-АРС. Должны обеспечивать: - формирование кодовых сигналов допустимой скорости в заданной системе кодирования в зависимости от занятости или свободности впереди лежащих участков пути, готовности или не готовности маршрута; - передачу кодовых сигналов допустимой скорости в поездные устройства АЛСАРС. Поездные приемники сигналов АЛС. обеспечивают прием сигналов АЛС сформированных стационарными устройствами АЛС-АРС. Модульный принцип пост Обеспечение функциональной безопасности Прием кодовых сигналов АЛС и их дешифрирование в значения допустимых скоростей движения. КСБДП. Требования к функциональным характеристикам иинформации Непрерывный контроль за соблюдением допустимой скорости и автоматическое торможение при ее превышении Формирование нулевой допустимой скорости в случае приема большего числа сигнальных частот («Числовая защита») Формирование признака «Направление движения» и индикации заданного направления Ограничение скорости движения до 20 км/ч при не заданном признаке направления Возможность введения электронного графика движения Обеспечение в автоматическом режиме заданного графика движения с точностью +/- 2,0с Возможность введения электронного профиля пути Формирование команды на торможение при нарушении приема кодовых сигналов АЛС (восприятие «ОЧ») Самодиагностика на уровне функциональных модулей Диагностика тепловых узлов Структурная схема комплексной системы безопасности движения поезда (КСБДП) Стационарные устройства АЛС – АРС. Рельсовая линия Поездные приемники сигналов АЛС основные (ПАЛС-О) Поездные приемники сигналов АЛС резервные (ПАЛС-Р) Устройство коммутации (УК ПК) (УК ПК) Процессор (П) Устройство ключей УК1 Датчики местоположения поезда(ДМ) Поездная линия связи (ПЛС) Процессор(П) Устройство ключей УК1 Устройство ключей УК2 Устройство ключей УК2 Устройство ключей УК3 Устройство ключей УК3 Вагонное оборудование КМ «Х» «О» «Т» ЭПВ КБ/ПБ Устройство ключей УК4 Устройство ключей УК4 Приемник информации (ПИ) Приемник информации (ПИ) Модуль регистрации параметров Модуль диагностики Дешифратор числового кода АЛС (ПД): «1/4»; «1/5»; «2/6»; «ДАУ»;"АБ» Модуль определения местоположения (МОМ) Измеритель скорости ИС1 Измеритель скорости ИС2 Блок управления тяговым приводом (БУТП) ВЗ №1 ВЗ№2 Контроль тормоза (КТ) Датчики нагрева тепловых узлов (ДНТ) Комплексная система безопасности движения поездов КСБДП Соблюдение в автоматическом режиме допустимых скоростей движения поезда по сигналам, заданным автоматической локомотивной сигнализацией (АЛС) Постоянный контроль бдительности машиниста ФУНКЦИИ БЕЗОПАСНОСТИ Исключение возможности движения в направлении противоположном заданному Гарантированная остановка поезда на станциях у сигнального знака "Остановка первого вагона" Гарантированная остановка поезда перед занятым участком пути, перед участком пути на котором нарушена целостность рельсовой цепи, перед светофором, имеющим показание "красный огонь" Экстренное торможение поезда с обеспечением тормозного пути в соответствии с требованием ПТЭ в случае не эффективности полного служебного торможения Регистрация параметров движения поезда и передача данных в автоматическом режиме Гарантированная остановка поезда при воздействии сигнала "Абсолютная остановка"(АРС-АО) Гарантированная остановка вслед идущего поезда в случае уменьшения расстояния до впереди идущего поезда менее расчетного тормозного пути ( "Опасное сближение") Комплексная система безопасности движения поездов КСБДП Невозможность скатывания поезда после его остановки (Функция противоскатывания) Невозможность открытия дверей с противоположной от платформы стороны ФУНКЦИИ БЕЗОПАСНОСТИ Удержание поезда при остановке в режиме торможения (функция "Тормоз удержания") Ограничение скорости движения до 20 км/ч в случае неисправности системы ("Аварийный режим") Управление движением поезда в автоматическом режиме режим автоведения Автоматическая идентификация и защищенность от не санкционированных воздействий Контроль профиля тоннеля и станции Исключение взаимодействия с нарушающим габарит подвижного состава препятствием Невозможность автоматического приведения в движение поезда при запрещающем показании светофора Расчёт и реализация энергооптимальных траекторий