идентификация технических объектов на основе нейросетевого
реклама

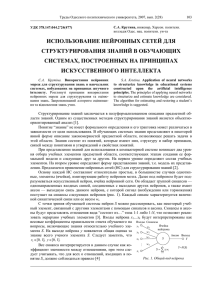
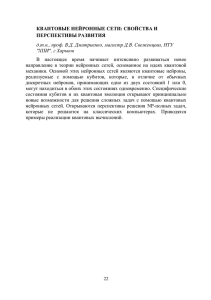
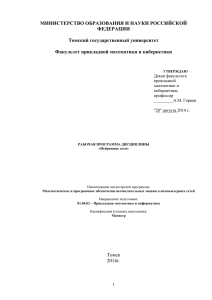
XIX Международная научно-практическая конференция «СОВРЕМЕННЫЕ ТЕХНИКА И ТЕХНОЛОГИИ» Секция 7: Информатика и управление в технических системах ИДЕНТИФИКАЦИЯ ТЕХНИЧЕСКИХ ОБЪЕКТОВ НА ОСНОВЕ НЕЙРОСЕТЕВОГО МЕТОДА Симонов П.К., Аметова Э.С. Томский политехнический университет, 634050, Россия, г. Томск, пр. Ленина, 30 E-mail: Sipaha@bk.ru Введение В современном мире системы автоматического управления (САУ) являются неотъемлемой частью повседневной жизни человека. Несмотря на разнообразие принципов функционирования и способов реализации, все САУ выполняют одинаковую задачу: обеспечивают автоматическое изменение одного или нескольких параметров объекта управления с целью установления требуемого режима его работы [1]. Составная задача проектирования САУ – получение модели поведения объекта управления. Модель может быть получена на основе знаний о структуре и физических принципах функционирования объекта либо путем проведения серии экспериментов с целью выявления особенностей поведения исследуемой системы [2]. Первый метод позволяет получать модели сравнительно простых объектов, так как с увеличением сложности объекта уменьшается точность и возрастает размерность модели. Второй метод, обычно называемый идентификацией, используется для получения формальных моделей с заданной степенью адекватности. Предметом дисциплин, посвященных изучению идентификации, адаптивного управления и проектирования САУ в целом, традиционно являются линейные или линеаризованные объекты и регуляторы. Тем не менее, все системы в той или иной мере проявляют нелинейное поведение, что вызывает интерес к изучению студентами методов и подходов к проектированию именно нелинейных систем. Один из подходов к идентификации – использование искусственных нейронных сетей для построения нейросетевых моделей нелинейных динамических объектов [3]. Настоящая статья посвящена использованию нейронных сетей для решения задач идентификации систем. Математическая модель нейрона Биологический нейрон (рис. 1) – это специальная клетка, которая структурно состоит из ядра, тела клетки и отростков. Одной из ключевых задач нейрона является передача электрохимического импульса по всей нейронной сети через доступные связи с другими нейронами. Притом, каждая связь характеризуется некоторой величиной, называемой силой синаптической связи. Эта величина определяет, что произойдет с электрохимическим импульсом при передаче его другому нейрону: либо он усилится, либо он ослабится, либо останется неизменным [4]. Искусственный нейрон имитирует в первом приближении свойства биологического нейрона. На вход искусственного нейрона поступает некоторое множество сигналов, каждый из которых является выходом другого нейрона. Каждый вход умножается на соответствующий вес, аналогичный синаптической силе, и все произведения суммируются, определяя уровень активации нейрона. На рис. 2 представлена модель, которая реализует эту идею. Хотя сети бывают разные, в основе почти всех лежит эта конфигурация [5]. Рис. 1. Нейрон [6] Рис. 2. Математическая модель нейрона Программная реализация Объект идентификации – некоторая эталонная функция f ( x) , которая задается пользователем. Нейронная сеть в начале своей работы ничего не знает о функции f ( x) и в процессе обучения максимально приближается к ней. В качестве функции активации был использован гиперболический тангенс ex e x tanh( x) ex e x За основу структуры нейронной сети взят трехслойный персептрон, представленный на рис. 3. Многослойными персептронами называют нейронные сети прямого распространения, т.е. входной сигнал распространяется в прямом направлении, от слоя к слою [4]. В качестве алгоритма обучения был выбран алгоритм обратного распространения ошибки. Обучение алгоритмом обратного распространения ошибки предполагает два прохода по всем слоям сети: прямого и обратного. При прямом проходе входной вектор подается на входной слой нейронной сети, после чего распространяется по сети от слоя к слою. В результате генерируется набор выходных 357 XIX Международная научно-практическая конференция «СОВРЕМЕННЫЕ ТЕХНИКА И ТЕХНОЛОГИИ» Секция 7: Информатика и управление в технических системах сигналов, который и является фактической реакцией сети на данный входной образ. Во время прямого прохода все синаптические веса сети фиксированы. Во время обратного прохода все синаптические веса настраиваются в соответствии с правилом коррекции ошибок, а именно: фактический выход сети вычитается из желаемого, в результате чего формируется сигнал ошибки. Этот сигнал впоследствии распространяется по сети в направлении, обратном направлению синаптических связей [4]. При нажатии на кнопку «График связей» для пользователя открывается окно, демонстрирующее структуру сети (рис. 5). Рис. 5. Окно «График нейронных связей» Рис. 3. Трехслойный персептрон Интерфейс пользователя программнометодического комплекса, реализующего обучающуюся нейронную сеть, представлен на рис. 4. Рис.4. Внешний вид программы Перед началом работы пользователю предлагается выбрать ряд параметров, таких как: Функция-эталон – целевая функция для нейронной сети; Нейронов – количество нейронов во втором и третьем слоях; Точность – максимально допустимая погрешность обучения сети; Шаг обучения – свойство алгоритма обратного распространения ошибки, определяющее скорость обучения. Моментум – свойство алгоритма обратного распространения ошибки, определяющее степень инерции скорости обучения. Так же в процессе работы программа выводит на экран три параметра процесса обучения: MaxFault – максимальное отклонение от целевой функции; SumFault – суммарное отклонение от целевой функции; Iterations – количество выполненных обучающих итераций. Также было разработано методическое обеспечение, которое содержит краткие теоретические сведения касаемо идентификации систем и нейронных сетей, рекомендации по выбору значений параметров обучения, варианты для выполнения лабораторных работ студентов и контрольные вопросы. Заключение В результате проведенной научноисследовательской работы получены следующие основные результаты: 1. Изучены принципы построения простых нейронных сетей и их применение для идентификации объектов типа «чёрный ящик». 2. Исследованы подходы к обучению нейронных сетей. 3. Разработан программно-методический комплекс для обучения студентов. В дальнейшем предполагается использовать полученные результаты для обучения студентов по дисциплине «Идентификация и диагностика систем» по направлению 220400 – «Управление в технических системах» профиль «Управление и информатика в технических системах». Список литературы: 1. Большой энциклопедический политехнический словарь. – Б. м.: Б. и., 2004 2. Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. – М.: Наука. Гл. ред. физ.-мат. лит., 1991. – 432 с. 3. Терехов С. А. Лекции по теории и приложениям искусственных нейронных сетей. – Снежинск: Лаборатория Искусственных Нейронных Сетей НТО-2, ВНИИТФ 4. Портал искусственного интеллекта [Электронный ресурс]. – Режим доступа: http://aiportal.ru, свободный. – Загл. с экрана 5. Нейронные сети. Часть 1. Основы искусственных нейронных сетей [Электронный ресурс]. – Режим доступа: http://habrahabr.ru/post/40137, свободный. – Загл. с экрана. 358