использование принципа интегральной адаптации для
реклама

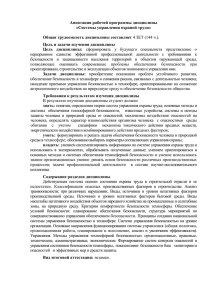
УДК 62-503.57 А.С. Синицын, А.А. Кузьменко (Южный федеральный университет; e-mail: aakuzmenko@sfedu.ru) ИСПОЛЬЗОВАНИЕ ПРИНЦИПА ИНТЕГРАЛЬНОЙ АДАПТАЦИИ ДЛЯ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ СИСТЕМЫ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА* Проведён синергетический синтез нелинейного адаптивного закона управления возбуждением синхронного генератора энергосистемы. Материалы могут быть полезны при решении проблем техносферной безопасности. Ключевые слова: синхронный генератор, система возбуждения, интегральная адаптация, синергетическая теория управления. A.S. Sinitsyn, A.A. Kuz’menko USING THE PRINCIPLE OF INTEGRAL ADAPTATION TO INCREASE THE ROBUSTNESS OF THE SYNCHRONOUS GENERATOR EXCITATION SYSTEM Synergetic synthesis of nonlinear adaptive control law for power system synchronous generator was held. The material can be helpful in solving the problems of technosphere safety. Key words: synchronous generator, excitation system, integral adaptation, synergetic control theory. В настоящее время основным видом используемой энергии по-прежнему является электроэнергия. В связи с ростом её потребления увеличивается размер энергосистем и их структурная и динамическая сложность. Это обуславливает необходимость применения вместо традиционных принципов и методов управления объектами энергосистем принципиально новых – синергетических [1], которые характеризуются использованием наиболее полных нелинейных многомерных и многосвязных моделей, обеспечивают в управляемой системе выполнение желаемых технологических инвариантов – аттракторов, повышение устойчивости (технологической безопасности) энергосистем. О важности последнего свидетельствует крупная авария в энергосистеме США летом 2005 г. Традиционный подход, основанный на линейных моделях объектов энергосистем, пригоден лишь в режимах номинальной работы энергосистем, так как линеаризованная модель является адекватной только в области малых отклонений от номинального режима. На практике, на систему постоянно действуют внешние и параметрические возмущения, зачастую выводящие систему далеко от номинального режима, например, скачки потребляемой мощности, замыкания на линиях электропередач или их обрыв. * Работа выполнена при финансовой поддержке РФФИ (грант №13-08-01008-а) Интернет-журнал "Технологии техносферной безопасности" (http://ipb.mos.ru/ttb) Выпуск № 3 (49), 2013 г. 1 Кроме того, параметры генератора не являются постоянными, что приводит нас к пониманию проблемы синтеза робастных законов управления. Современные методы теории управления основаны либо на методе точной линеаризации обратной связью, либо слишком сложны в исполнении, например, использование нечётких регуляторов, нейронных сетей для адаптации к возмущениям [1]. В данной статье проведён синтез нелинейного адаптивного закона управления возбуждением синхронного генератора (СГ), обеспечивающего: заданное напряжение на выводах СГ Ut = U0 и его синхронизм в номинальном режиме работы = 0; возврат СГ в номинальный режим после аварийных ситуаций; устойчивость работы СГ при параметрических возмущениях. Для исследования использовалась модель СГ, работающего на систему неограниченной мощности с чисто активной нагрузкой [2], которая в относительных единицах в системе синхронно вращающихся осей d, q имеет вид x1 t c1 x1 с2 x3 с3 x4 x2 с4 sin x5 f1 x1d f 2 x3d ; x2 t с3 x4 x1 с5 x2 с4 cos x5 f 3 x2 d ; x3 t c6 x3 c7 x1 b1u; x4 t c8 c9 x3 x2 c10 x1 x2 c11 x4 ; (1) x5 t x4 0 , где x1, x2 – потокосцепление по оси d и q соответственно; x3 – ЭДС ротора СГ; x4 – частота вращения ротора; x5 – электрический угол СГ; d – параметрическое возмущение, выражающееся в изменении сопротивления линии электропередачи. u – ЭДС возбуждения. Для синтеза требуемого закона управления использован принцип интегральной адаптации, основанный на методе аналитического конструирования агрегированных регуляторов (АКАР) [1, 3]. При синтезе полагалось, что возмущение – это кусочно-постоянная функция с неизвестной заранее амплитудой. В соответствии с принципом интегральной адаптации необходимо расширить исходную модель (1) дополнительным дифференциальным уравнением zt k (U t U 0 ) k2 ( x4 0 ) . (2) Правая часть уравнения (2) структурно представляет собой желаемый технологический инвариант – постоянное желаемое значение терминального напряжения, которое описывается выражением U t U q2 U d2 , Интернет-журнал "Технологии техносферной безопасности" (http://ipb.mos.ru/ttb) Выпуск № 3 (49), 2013 г. 2 где U d U sin x5 s1 x1 s2 x3 ; U q U cos x5 s3 x2 . Расширенную модель СГ получим, добавив уравнение (2) в (1) и заменив слагаемые с d на z: x1 t c1 x1 с2 x3 с3 x4 x2 с4 sin x5 z; x2 t с3 x4 x1 с5 x2 с4 cos x5 z; x3 t c6 x3 c7 x1 b1u; x4 t c8 c9 x3 x2 c10 x1 x2 c11 x4 ; (3) x5 t x4 1; zt k (U t U 0 ) k2 ( x4 0 ), где U0, ω0 – постоянное желаемое значение терминального напряжения и номинальная частота соответственно. Согласно процедуре метода АКАР, составляется макропеременная, реализующая желаемый технологический инвариант: (U t U 0 ) ( x4 0 ) z . (4) Вводим основное функциональное уравнение метода АКАР T t 0 , (5) которое распишем с учётом (4) и (3). В итоге, разрешив (5) относительно u, получим u (((U k 2s1c4 )T U )U sin( x5 ) 2 (((((2 s2 c7 2 s1c1 )U 2 s12 c4 ) 2 kU s1 )T 2U s1 ) x1 ((((2 s2 c6 2 s1c2 )U 2 s2 s1c4 ) 2kU s2 )T 2U s2 ) x3 2U ((( s1c3 s3 ) x4 s3 ) x2 zs1 )T) sin x5 U ((U k 2s3c4 )T U ) cos( x5 ) 2 (2(( s3c3 s1 ) x4 s1 )U Tx1 12Ts2U ( x4 1) x3 2s3 (((( s3c4 U c5 ) U k )T U ) x2 TU z )) cos x5 s1 (((2s1c1 2 s2 c7 ) s1k )T s1 ) x12 (6) ((((2s c 2 s2 (c6 c1 ) s1 2 s c ) 2ks1s2 )T 2s2 s1 ) x3 2 1 2 2 2 7 2((c3( s1 s3 )( s1 s3 ) x4 0,5c10) x2 s12 z )T ) x1 (((2 s2 c6 2 s1c2 ) ks2 )T s2 ) s2 x32 2T ((0,5c9 s2 s1c3 x4 ) x2 s2 s1 z ) x3 s32 ((2c5 k )T ) x22 2Ts32 x2 z ((c11 k )T ) x4 z (2 k c8 )T ) /(2T(U sin x5 s1 x1 s2 x3 ) s2b1 , где z – динамическая переменная, получаемая из (2): z k (U t 1) k2 ( x4 0 ) dt . Интернет-журнал "Технологии техносферной безопасности" (http://ipb.mos.ru/ttb) Выпуск № 3 (49), 2013 г. 3 Для выполнения численного моделирование использовалась среда MATLAB. Для качественной демонстрации закона (6) было произведено моделирование замкнутой системы (3) с пропорционально-интегральнодифференциальным (ПИД) регулятором: t dU u k p U k d ki Udt , (7) dt 0 где U U t U 0 – отклонение терминального напряжения от заданного. Параметры системы (1) и законов управления (6), (7) приведены в табл. 1. c1 = 10,516 c2 = 16,529 c3 = 376,14 c4 = 358,14 β = 24 kd = 80 c5 = 28,465 c6 = 1,1761 c7 = 1,0066 c8 = 0,21097 γ = 0,125 ki = 80 c9 = 0,864 c10 = 0,73246 c11 = 0,02097 s1 = 0,02345 s2 = 0,03937 s3 = 0,07483 f1 = 441,47 f2 = 742,15 f3 = 1414,6 k2 = 2 U∞ = 0,95 T = 0,001 Таблица 1 α = 1,5 kp = 1 Uo = 1 ω0 = 1 k=1 k2 = 1 На рис. 1-7 представлены результаты моделирования замкнутой системы (1) с различными законами управления: на графиках сплошной линией показаны результаты с синергетическим законом управления (6), а пунктирной линией – с законом (7). При моделировании замкнутой системы действует параметрическое возмущение d, моделирующее короткое замыкание на линии: 0, d 0,02, 0,012, t 5; 5 t 5,2; t 5,2. На основе данных моделирования можно сделать вывод что синтезированный синергетический закон (6) полностью выполняет предъявляемые к нему требования, кроме того, он позволяет выдерживать заданный режим СГ, затрачивая меньше энергии, что видно из рис. 7. Синергетический закон способен обеспечить более быстрое гашение параметрических возмущений нежели классический ПИД-регулятор, при этом отсутствуют колебания в переходном режиме. В силу того, что при синтезе закона (6) использовались уравнения исходной системы (3), он способен обеспечивать устойчивость системы при больших значениях возмущения, по сравнению с ПИД-регулятором. Для этого произведем расчёт старшего ляпуновского показателя при различных значениях d. Как известно, показатели Ляпунова являются численной оценкой эволюции малого возмущения в пространстве состояния системы [4]. Следовательно, если самый большой из спектра ляпуновских показателей является отрицательным, то и все остальные показатели будут отрицательными, откуда следует, что возмущения в системе угасают по всем направлениям. А это говорит об устойчивости синтезированной системы. Интернет-журнал "Технологии техносферной безопасности" (http://ipb.mos.ru/ttb) Выпуск № 3 (49), 2013 г. 4 Рис. 1. Терминальное напряжение Рис. 2. Частота вращения ротора Рис. 3. Потокосцепление по оси d Рис. 4. Потокосцепление по оси q Рис. 5. ЭДС ротора Рис. 6. Электрический угол СГ Рис. 7. ЭДС возбуждения – управление Интернет-журнал "Технологии техносферной безопасности" (http://ipb.mos.ru/ttb) Выпуск № 3 (49), 2013 г. 5 Полагаясь на данное определение, из графика, изображенного на рис. 8, можно сделать вывод, что синергетический закон обеспечивает значительно большую область устойчивости. Рис. 8. Область устойчивости системы В заключение можно сказать, что синтез методом АКАР на основе введения инвариантных многообразий в систему, вкупе с введением интегральной составляющей для подавления возмущений, предоставляет возможность синтезировать законы, обеспечивающие более точное, быстрое, экономичное, а главное – надежное управление, нежели классические линейные законы. В целом, это обеспечивает повышение технологической безопасности энергосистемы – производителей и потребителей электроэнергии. Литература 1. Колесников А.А., Веселов Г.Е., Кузьменко А.А. Новые технологии проектирования современных систем управления процессами генерации электроэнергии. М.: Издательский дом МЭИ, 2011. 2. Андерсон П.М., Фуад А.А. Управление энергосистемами и устойчивость. М.: Энергия, 1980. 3. Современная прикладная теория управления: в 3-х частях. Ч. II. Синергетический подход в теории управления / Под. ред. Колесникова А.А. Москва-Таганрог: Изд-во ТРТУ, 2000. 4. Кузнецов С.П. Динамический хаос. М.: ФИЗМАТЛИТ, 2006. Статья опубликована 10 июля 2013 г. Интернет-журнал "Технологии техносферной безопасности" (http://ipb.mos.ru/ttb) Выпуск № 3 (49), 2013 г. 6