Решение задачи волновой диагностики дорог на суперкомпьютере
реклама

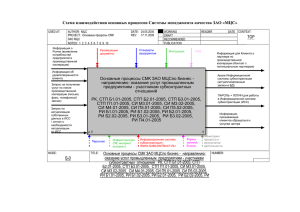
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 Решение задачи волновой диагностики дорог на суперкомпьютере 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 28 Решение задачи волновой диагностики дорог на суперкомпьютере Ðàáîòà ïîñâÿùåíà îáðàòíîé çàäà÷å äèàãíîñòèêè äîðîã ýëåêòðîìàãíèòíûì çîíäèðîâàíèåì. Ïðèâåäåíà ëèíåéíàÿ ïîñòàíîâêà çàäà÷è, ðàçðàáîòàíû ìåòîäû è àëãîðèòìû ðåøåíèÿ, â ïðåäïîëîæåíèè ñëîèñòîé ñòðóêòóðû äîðîæíîãî ïîëîòíà. Ïîêàçàíî, ÷òî ïðåäëàãàåìûå ìåòîäû îáåñïå÷èâàþò ðàçðåøåíèå è ãëóáèíó çîíäèðîâàíèÿ, ïðèåìëåìûå äëÿ äèàãíîñòèêè äîðîã. Íà íàèáîëåå òðóäîåìêèõ ýòàïàõ èñïîëüçîâàíû ðåêîíôèãóðèðóåìûå âû÷èñëèòåëüíûå ñèñòåìû íà áàçå ÏËÈÑ. А.В. Гончарский — зав. лабораторией, докт. физ.-мат. наук, профессор, НИВЦ МГУ им. М.В. Ломоносова, e-mail: gonchar@srcc.msu.ru С.Л. Овчинников — электроник, НИВЦ МГУ им.М.В.Ломоносова,м e-mail: osl@starnet.ru С.Ю. Романов — старший научный сотрудник, канд. физ.-мат. наук, НИВЦ МГУ им. М.В. Ломоносова, e-mail: romanov@srcc.msu.ru 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 Введение Ðàñøèðåíèå ñåòè àâòîìîáèëüíûõ äîðîã ïðèâåëî ê óæåñòî÷åíèþ íîðìàòèâíûõ òðåáîâàíèé, ïðåäúÿâëÿåìûõ ê èõ áåçîïàñíîñòè, ê íåîáõîäèìîñòè ïðîâåäåíèÿ êà÷åñòâåííîãî è èíôîðìàòèâíîãî îáñëåäîâàíèÿ, ñîâåðøåíñòâîâàíèþ êîìïëåêñíîé ñèñòåìû ìîíèòîðèíãà äîðîæíîãî ïîëîòíà. Íàñòîÿùàÿ ðàáîòà ïîñâÿùåíà ðàçðàáîòêå ìåòîäîâ è àëãîðèòìîâ ðåøåíèÿ çàäà÷è äèàãíîñòèêè ñòðóêòóðû äîðîãè ñ ïîìîùüþ ãåîðàäèîëîêàöèîííîãî çîíäèðîâàíèÿ. Äëÿ ïðîâåäåíèÿ ðàñ÷åòîâ íà íàèáîëåå âû÷èñëèòåëüíî òðóäîåìêèõ ýòàïàõ èñïîëüçóþòñÿ ðåêîíôèãóðèðóåìûå âû÷èñëèòåëüíûå ñèñòåìû (ÐÂÑ) íà áàçå ÏËÈÑ. Ãåîðàäèîëîêàöèÿ (â àíãëîÿçû÷íîé ëèòåðàòóðå «Ground Penetrating Radar» èëè GPR) ÿâëÿåòñÿ îäíèì èç íàèáîëåå ìîëîäûõ è áûñòðî ðàçâèâàþùèõñÿ ìåòîäîâ íåðàçðóøàþùåãî êîíòðîëÿ, ñïîñîáíûõ íàèáîëåå ïîëíî îòîáðàçèòü êàðòèíó äîðîãè. GPR ÿâëÿòñÿ áåñêîíòàêòíûì âûñîêî÷àñòîòíûì ýëåêòðîìàãíèòíûì ìåòîäîì, îáëàäàþùèì ðÿäîì ïðåèìóùåñòâ ïåðåä äðóãèìè ìåòîäàìè. Îñíîâíûìè ïðåèìóùåñòâàìè ÿâëÿþòñÿ áûñòðîòà ïîëó÷åíèÿ äîñòîâåðíîé êà÷åñòâåííîé èíôîðìàöèè, âûñîêîå ðàçðåøåíèå, ïîâñåìåñòíîñòü ïðèìåíåíèÿ, ýêîëîãè÷åñêàÿ áåçîïàñíîñòü. GPR îñíîâàíà íà èñïîëüçîâàíèè êëàññè÷åñêèõ ôèçè÷åñêèõ ïðèíöèïîâ ðàäèîëîêàöèè: íà ñâîéñòâå ðàäèîâîëí îòðàæàòüñÿ îò ãðàíèö ðàçäåëà ñðåä ñ ðàçëè÷íûìè äèýëåêòðè÷åñêèìè ñâîéñòâàìè. Ïðè GPR îáñëåäîâàíèè äîðîæíîãî ïîëîòíà àíòåííûé áëîê ãåîðàäàðà ïåðåìåùàåòñÿ âäîëü äîðîãè, èçëó÷àÿ è ïðèíèìàÿ îòðàæeííûå ñèãíàëû (ðèñ.1). Íàáîð ñìåííûõ àíòåííûõ ìîäóëåé îáåñïå÷èâàåò âîçìîæíîñòü çîíäèðîâàíèÿ â áîëüøîì äèàïàçîíå ÷àñòîò (16 – 2000 ÌÃö). Ïîâûøåíèå ÷àñòîòû çîíäèðîâàíèÿ ïðèâîäèò ê óëó÷øåíèþ ðàçðåøàþùåé ñïîñîáíîñòè, íî ê óìåíüøåíèþ ãëóáèíû çîíäèðîâàíèÿ. Äëÿ èñïîëüçóåìûõ àíòåíí ñ öåíòðàëüíûìè ÷àñòîòàìè 1,5 ÃÃö, 900 ÌÃö è 500 ÌÃö ìàêñèìàëüíàÿ ãëóáèíà çîíäèðîâàíèÿ ñîñòàâëÿåò äî íåñêîëüêèõ ìåòðîâ, ìàêñèìàëüíîå ðàçðåøåíèå äî 10 ñì. Èññëåäîâàíèÿ ïî èñïîëüçîâàíèþ ãåîðàäàðîâ äëÿ äèàãíîñòèêè äîðîæíîãî ïîëîòíà âåäóòñÿ êàê â íàøåé ñòðàíå, òàê è çà ðóáåæîì (Geophysical Survey Systems, Inc, ÑØÀ; Sensors & Sîftware, Êàíàäà; MALA GeoScience AB, Øâåöèÿ). Êàê ïðàâèëî, ñîõðàíåííûå ðàäàðîãðàììû äàþò ëèøü êà÷åñòâåííóþ êàðòèíó ïëîõîãî ðàçðåøåíèÿ ñîñòîÿíèÿ äîðîãè, è òîëüêî ñïåöèàëèñò, ïðè÷åì ëèøü î÷åíü ïðèáëèçèòåëüíî, ìîæåò ïîíÿòü ñòðóêòóðó èññëåäóåìîãî äîðîæíîãî ïîêðûòèÿ.  íàñòîÿùåì ïðîåêòå ðàäàðîãðàììû ÿâëÿþòñÿ ëèøü èñõîäíûìè äàííûìè äëÿ äàëüíåéøåé ìàòåìàòè÷åñêîé îáðàáîòêè è èíòåðïðåòàöèè ñîáðàííûõ äàííûõ íà ñóïåðêîìïüþòåðàõ, ÷òî ïîçâîëèò îïåðàòèâíî ïîëó÷àòü êîëè÷åñòâåííóþ äèàãíîñòè÷åñêóþ èíôîðìàöèþ ñ èçîáðàæåíèåì âûñîêîãî ðàçðåøåíèÿ. Îáúåìû îáðàáàòûâàåìûõ äàííûõ îãðîìíû, êðîìå òîãî, ïðåäñòàâëÿåò èíòåðåñ îáðàáàòûâàòü â ðåàëüíîì âðåìåíè (â on-line 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 ðåæèìå) èíòåíñèâíûé ïîòîê ïîñòóïàþùèõ äàííûõ. Ýòî íàêëàäûâàåò æåñòêèå òðåáîâàíèÿ íà ýôôåêòèâíîñòü èñïîëüçóåìûõ àëãîðèòìîâ, ïðîãðàìì è âû÷èñëèòåëüíûõ ñèñòåì.  ðàññìàòðèâàåìîé çàäà÷å ðåàëèçàöèÿ âû÷èñëèòåëüíî òðóäîåìêèõ ÷àñòåé âûïîëíåíà íà ðåêîíôèãóðèðóåìîé âû÷èñëèòåëüíîé ñèñòåìå ñ ïðèìåíåíèåì ÿçûêà COLAMO. Ïî ðåçóëüòàòàì îáðàáîòêè ñòàâèòñÿ çàäà÷à îáíàðóæåíèÿ êîíñòðóêòèâíûõ ñëîeâ äîðîæíîé îäåæäû è îïðåäåëåíèÿ èõ òîëùèí, îáíàðóæåíèå ñêðûòûõ êðóïíûõ äîðîæíûõ ðàçðóøåíèé, ïîòåíöèàëüíî ïðèâîäÿùèõ ê êðóïíûì àâòîìîáèëüíûì àâàðèÿì. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 (1) ãäå u(x,t) — ðàäàðîãðàììà, A(t-) — ôóíêöèÿ îòðàæåíèÿ îò ãðàíèöû è f(t)— ïðÿìàÿ âîëíà, p1, p2 — íåëèíåéíûå ïàðàìåòðû, à K — ëèíåéíûé, k(x,z) — îïèñûâàåò ñòðóêòóðó äîðîãè.  îáðàòíîé çàäà÷å äèàãíîñòèêè äîðîæíûõ ïîêðûòèé òðåáóåòñÿ íàéòè ôóíêöèþ êîýôôèöèåíòà îòðàæåíèÿ k(x,z) ïðè íåèçâåñòíûõ ïàðàìåòðàõ K,p1, p2. Êàê ïîêàçàëè ðåçóëüòàòû ýêñïåðèìåíòîâ, çàðåãèñòðèðîâàííûå îòðàæåííûå äàííûå íå ìîãóò áûòü ÿâíî èíòåðïðåòèðîâàíû êàê ñòðóêòóðà äîðîæíîãî ïîëîòíà (÷òî âèäíî èç ðèñ.2). Ïîýòîìó òðåáóåòñÿ ðåøàòü îáðàòíóþ íåêîððåêòíî ïîñòàâëåííóþ çàäà÷ó (1), èñïîëüçóÿ ðåãóëÿðèçèðóþùèå àëãîðèòìû [1]. Òàêèå ôàêòîðû, êàê: 1) áîëüøàÿ äëèòåëüíîñòü è àìïëèòóäà ïðÿìîãî ñèãíàëà; 2) äèñïåðñèÿ èìïóëüñà â ñðåäå; 3) ñèëüíîå çàòóõàíèå èìïóëüñà ïðè ïðîõîæäåíèè â ñðåäå è îòðàæåíèè îò ãðàíèö — ïðèâîäÿò ê äîïîëíèòåëüíûì ñåðüåçíûì ïðîáëåìàì ïðè ðåøåíèè îáðàòíîé çàäà÷è. Рис. 2. Первичные зарегистрированые данные зондирования дорожного покрытия Рис. 1. Георадиолокация и контроль качества дорожного полотна Математическая постановка и методы решения  ðàìêàõ âîëíîâîé ìîäåëè ñîîòíîøåíèå ìåæäó èñêîìîé ñëîèñòîé ñòðóêòóðîé äîðîæíîãî ïîëîòíà è âõîäíûìè äàííûìè (ðàäàðîãðàììîé) èìååò âèä óðàâíåíèÿ Ôðåäãîëüìà 1-ãî ðîäà: Óñëîâíî ìîæíî âûäåëèòü íåñêîëüêî îñíîâíûõ ýòàïîâ îáðàáîòêè GPR äàííûõ [2]. Íàèáîëåå âû÷èñëèòåëüíî òðóäîåìêèìè (äî 80—90% âðåìåíè) ÿâëÿþòñÿ ýòàïû âû÷èòàíèÿ ïðÿìîãî ñèãíàëà è îáðàùåíèÿ èíòåãðàëüíîãî óðàâíåíèÿ, ÷òî ñâÿçàíî ñ ïåðåáîðîì ïî íåëèíåéíûì ïàðàìåòðàì. Ýòè ýòàïû ðåàëèçîâàíû íà ìíîãîïðîöåññîðíîé âû÷èñëèòåëüíîé ñèñòåìå ñ ðåêîíôèãóðèðóåìîé àðõèòåêòóðîé (ÐÂÑ) â âèäå îòäåëüíûõ ïðîãðàìì íà ÿçûêå COLAMO [3]. COLAMO ïðåäñòàâëÿåò ñîáîé âûñîêîóðîâíåâûé ÿçûê äëÿ ÐÂÑ, êîòîðûé äàåò âîçìîæíîñòü ìàêñèìàëüíî ïðîñòî îïèñûâàòü ðàçëè÷íûå âèäû ïàðàëëåëèçìà â ñæàòîì âèäå. ÐÂÑ âêëþ÷àëà â ñåáÿ äâà áàçîâûõ ìîäóëÿ «Àëüêîð» (ïî 16 ÏËÈÑ Virtex-5). Ïðè ðåàëèçàöèè ïðîãðàììû íà ÐÂÑ áûëî ïðîâåäåíî ãëóáîêîå ðàñïàðàëëåëèâàíèå, â òîì ÷èñëå çà ñ÷åò êîíâåéåðèçàöèè. Ïðè ýòîì èñïîëüçîâàëñÿ êîìáèíèðîâàííûé âàðèàíò: íåñêîëüêî ïîðöèé äàííûõ îáðàáàòûâàþòñÿ ïàðàëëåëüíî, ïðè÷åì äëÿ êàæäîé äåëàåòñÿ ñðàçó íåñêîëüêî øàãîâ ïî ïåðåáîðó ïàðàìåòðà. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 Экспериментальная часть Áûë ðàçðàáîòàí ìîáèëüíûé êîìïëåêñ ïî çîíäèðîâàíèþ äîðîã (ðèñ.3) íà áàçå ñåðèéíî âûïóñêàåìûõ ãåîðàäàðîâ. Рис. 3. Экспериментальный мобильный комплекс для зондирования дорог 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 Заключение Äëÿ äèàãíîñòèêè äîðîã ñî ñëîèñòîé ñòðóêòóðîé áûëè ðàçðàáîòàíû ìåòîäû è àëãîðèòìû, îñíîâàííûå íà ëèíåéíîé ìîäåëè. Ïðåäëàãàåìûå ìåòîäû îáåñïå÷èâàþò ðàçðåøåíèå 8—10 ñì, òî÷íîñòü ~2 ñì è ãëóáèíó îêîëî 0,5—1 ì. Èñïîëüçîâàíèå ÐÂÑ íà òðóäîåìêèõ ýòàïàõ âû÷èñëåíèé ïîçâîëÿåò ïîëó÷èòü âûèãðûø íà ýòèõ ýòàïàõ îò 100 äî 200 ðàç, äîñòèãíóòà ïðîèçâîäèòåëüíîñòü ÐÂÑ äî 90 ÃÔëîïñ, ÷òî ñîñòàâëÿåò îêîëî 75% îò ïèêîâîé. Íà ðèñ. 4à, 5à èçîáðàæåíû èñõîäíûå äàííûå (ðàäàðîãðàììû), ïîëó÷åííûå â õîäå çîíäèðîâàíèÿ äâóõ ó÷àñòêîâ äîðîæíîãî ïîëîòíà äëèíîé 50 ì è 75 ì íà ÷àñòîòå 1,5 Ìãö, íà ðèñ. 4á, 5á — ðåçóëüòàòû âûäåëåíèÿ ãðàíèöû. Ïî ãîðèçîíòàëè îòëîæåíû íîìåðà òðàññ âäîëü äîðîãè. Ïî âåðòèêàëè — íîìåð îòñ÷åòà (â ãëóáèíó). Íà ðèñ. 4à, 5à âèäåí ìàñêèðóþùèé ýôôåêò ïðÿìîé âîëíû, âèçóàëüíî âûäåëèòü ñëîè íå óäàåòñÿ. Íà Ðèñ 4á, 5á âûäåëåíû ïðèïîâåðõíîñòíûå ñëîè àñôàëüòà è áåòîíà, âåðõíÿÿ ãîðèçîíòàëüíàÿ ïðÿìàÿ — ïîâåðõíîñòü äîðîãè. Íà ðèñ.4 äîðîãà íå íîâàÿ, êîòîðàÿ íåîäíîêðàòíî ðåìîíòèðîâàëàñü, ïîýòîìó íàéäåíî íåñêîëüêî ñëîåâ. Íà ðèñ.5 — íîâàÿ çàãîðîäíàÿ äîðîãà, ñîñòîÿùàÿ èç îäíîãî ñëîÿ àñôàëüòà òîëùèíîé 12—15 ñì. Áîëåå ñâåòëûå ó÷àñòêè ëèíèé ñîîòâåòñòâóþò ãðàíèöàì, âûäåëåííûì ñ ìåíüøèì óðîâíåì äîñòîâåðíîñòè. Рис. 4. Рис. 5. Результаты исследования старой (4а, б) и новой (5а, б) дорог с помощью разработанной технологии 1. Tikhonov A., Goncharsky A., Stepanov V., Yagola. A. Numerical methods for the solution of illposed problems. Dordrecht /Boston/, London: Kluwer Academic Publ., 1995. 2. Гончарский А.В. , Овчинников С.Л. , Романов С.Ю. Обратные задачи волновой диагностики дорожного полотна // Вычислительные методы и программирование. Т.10, 2009. С. 275–280. 3. Коваленко А.Г., Овчинников С.Л., Романов С.Ю. Решение обратной задачи диагностики дорог на реконфигурируемой вычислительной системе с применением языка COLAMO – Труды Всероссийской Суперкомпьютерной конференции «Научный сервис в сети ИНТЕРНЕТ: масштабируемость, параллельность, эффективность. М.: Изд-во МГУ. 2009. С. 217–223.