Лабораторная работа № 2 «Исследование импульсных систем»
реклама

Лабораторная работа № 2
«Исследование импульсных систем»
1.1 Теоретические положения
Представление данных в импульсной системе
Характерной особенностью импульсных систем автоматического управления (ИСАУ)
является то, что хотя бы одна из переменных является квантованной по времени. Эти
квантованные по времени величины при помощи импульсной модуляции преобразуются в
последовательность импульсов, которые в дальнейшем воздействуют на непрерывную часть
системы. Процесс квантования и импульсной модуляции осуществляется импульсным элементом.
Импульсная система состоит из непрерывной части и импульсных элементов (рис. 1).
Любую систему можно привести к этому типу.
Рисунок 1
ИЭ - импульсный элемент
НЧ – непрерывная часть системы (здесь собраны все остальные элементы системы).
В этой структуре импульсный элемент (ИЭ) осуществляет квантование сигнала и
модуляцию.
Процесс импульсной модуляции состоит в изменении по определенному закону какоголибо параметра периодически повторяющихся импульсов.
Величина, определяющая закон модуляции, называется модулирующей величиной.
Ti
Рисунок 2
Основными параметрами импульсной последовательности являются (рис. 2):
A − амплитуда (высота) импульса;
– длительность (ширина) импульса;
T(Ti) − период квантования (повторения, дискретности);
В зависимости от того, какой параметр последовательности импульсов изменяется,
различают следующие виды импульсной модуляции:
1. Амплитудно-импульсная модуляция (АИМ), при которой амплитуда импульса
пропорциональна входному сигналу;
2. Широтно-импульсная модуляция (ШИМ), при которой длительность импульса
пропорциональна входному сигналу;
3. Время-импульсная модуляция (ВИМ), включающая в себя фазоимпульсную модуляцию
ФИМ, когда фаза или временной сдвиг импульса относительно начала периода дискретности T
пропорциональна входному сигналу, и частотно-импульсную модуляцию (ЧИМ) – частота
дискретности пропорциональна входному сигналу.
Естественно, при квантовании непрерывного сигнала происходит потеря информации,
поскольку значения квантованного сигнала известны только для дискретных моментов времени.
Для уменьшения потери информации после квантователя вводят устройство восстановления
данных, называемое фиксатором. Его назначение – преобразовать квантованный сигнал в
непрерывный, близкий исходному. Наиболее распространен фиксатор нулевого порядка,
запоминающий квантованный сигнал на весь период квантования T.
Идеальный ИЭ производит периодически повторяющиеся (с периодом T) импульсы
бесконечной длительности и бесконечной амплитуды. При моделировании идеальный ИЭ
реализуется..
T
t
10
Реальный импульсный элемент объединяет квантователь и фиксатор, которые отдельно не
существуют. Сигналы ИЭ и его схематическое изображение показаны на рис. 3.
Сигнал на выходе ИЭ можно представить выражением:
Рисунок 3
Подвергнув это выражение преобразованию Лапласа, получим
Выражение в квадратных скобках описывает операцию квантования непрерывного сигнала,
а второй сомножитель – фиксацию (восстановление), что эквивалентно изображению ИЭ на рис. 4.
Другими словами: импульсный элемент состоит из идеального импульсного элемента
(квантователя) – ключа и
фиксатора с передаточной функцией
.
Рисунок 4
Математическую модель идеального импульсного элемента
определяется выражением
Передаточную
непрерывной части:
функцию
экстраполятора
объединяют
с
передаточной
функцией
где KЭНЧ(s) – передаточная функция эквивалентной непрерывной части.
Задача идеального импульсного элемента (ИИЭ) в модели – сформировать для
дальнейшего математического описания системы либо последовательность импульсов типа δфункций с площадью пропорциональной x(t), либо решетчатую функцию, в основе которой
единичная импульсная функция δ0(t)={ 1 при t=0; 0 при t≠0} с амплитудой пропорциональной x(t).
Задача экстраполятора – математически описать выходную последовательность
реального импульсного звена между значениями решетчатой функции (экстраполяция – это
прогнозирование (синтез) сигнала по истории выборок вплоть до следующего достоверного
значения, которое в текущий момент неизвестно, и, получив которое, можно провести
историческую коррекцию прогноза – интерполяцию).
Коэффициент передачи квантователя (ИИЭ) обратно пропорционален периоду
квантования, а коэффициент передачи экстраполятора нулевого порядка равен периоду. Таким
образом, общий коэффициент передачи квантующей и восстанавливающей цепи, т.е. ИЭ обычно
равен единице (рис. 5).
Рисунок 5
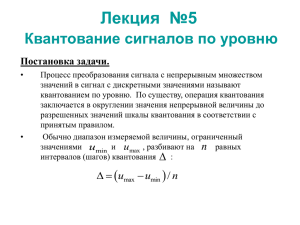
1.2
1.3 Порядок выполнения работы
Цель работы: построение структурных алгоритмических схем для моделирования в
системе ШИМ, формирование импульсных сигналов, анализ влияния импульсного регулирования
на характер переходных и установившихся режимов в замкнутых автоматических системах
управления.
1.
Создать разомкнутую импульсную систему с динамическим звеном 2-го порядка в
соответствии с заданием варианта при U З ( p) 1 . Снять осциллограмму переходного процесса.
Рисунок 6
2.
Создать замкнутую импульсную систему. Рассчитать KОС, при условии 0 .
x( p) KОС y( p) 0 .
Снять осциллограмму переходного процесса.
Рисунок 7
3.
Определить частоту эквивалентной непрерывной части нч
Рисунок 8
Граничная частота или полоса пропускания непрерывной части Ti выбирается из условия
теоремы Котельникова-Шеннона: если частота дискретизации или частота квантования сигнала
больше или равна двойной граничной частоте (полосы пропускания непрерывной части системы),
то можно восстановить предыдущий непрерывный сигнал однозначно) 0 2нч .
Частоту непрерывной части нч можно определить из амплитудно-частотной
5 10 A(0) .
характеристики АЧХ A( ) , например для колебательного звена (рис. 9), при A
100%
Для этого использовать программу
>> [a,b,c,d]=linmod('имя файла-структуры');
w=linspace(0,300,500);
[Mag,Phase,w]=bode(a,b,c,d,1,w);
plot(w,Mag);grid on
A
A(0)
Рисунок 9
4.
Реализовать импульсный элемент (ИЭ) двумя способами:
- с экстраполятором нулевого порядка (Zero-Order Hold) (рис. 10);
Рисунок 10
- в виде последовательного соединения идеального ИЭ и формирователя импульсов
(рис. 11).
Рисунок 11
Снять осциллограммы переходных процессов при разных частотах квантования и при
различной реализации ИЭ.
Частоту квантования выставлять в первом случае большей, чем частота пропускания
линейной цепи, в другом - меньшей. Частоту квантования задается с помощью блока Pulse
Generator (генератор импульсов). Для изменения частоты квантования в блоке Pulse Generator
необходимо менять значение параметра Period (Ti), соблюдая условие A 1 .
Определить нч , соответствующую каждой частоту квантования.
5.
Снять осциллограммы переходного процесса выходной координаты y(t).
Оценить влияние величины периода дискретизации Ti на процессы в системе путем
моделирования. Оценить устойчивость системы.
Сравнить и сделать выводы.
1.4 Настройка параметров блоков
1.4 Настройка параметров расчета
Окно настройки параметров расчета имеет вкладки:
• Solver (Расчет) – Установка параметров расчета модели. Установка параметров расчета
модели выполняется с помощью элементов управления, размещенных на вкладке Solver. Эти
элементы разделены на три группы.
При выборе параметров расчета необходимо указать способ моделирования (Type) и метод
расчета нового состояния системы. Для параметра Type доступны два варианта – c
фиксированным (Fixed-step) или с переменным (Variable-step) шагом.
Как правило, Variable-step используется для моделирования непрерывных систем, a Fixedstep – для дискретных. Список методов расчета нового состояния системы содержит несколько
вариантов. Первый вариант (discrete) используется для расчета дискретных систем. Остальные
методы используются для расчета непрерывных систем.
Эти методы различны для переменного (Variable-step) и для фиксированного (Fixed-step)
шага времени, но, по сути, представляют собой процедуры решения систем дифференциальных
уравнений. Подробное описание каждого из методов расчета состояний системы приведено во
встроенной справочной системе MATLAB.
Ниже двух раскрывающихся списков Type находится область, содержимое которой
меняется в зависимости от выбранного способа изменения модельного времени. При выборе
Fixed-step в данной области появляется текстовое поле Fixed-step size (величина фиксированного
шага), позволяющее указывать величину шага моделирования.
Величина шага моделирования по умолчанию устанавливается системой автоматически
(auto). Требуемая величина шага может быть введена вместо значения auto либо в форме числа,
либо в виде вычисляемого выражения (то же самое относится и ко всем параметрам
устанавливаемым системой автоматически).
При выборе Fixed-step необходимо также задать режим расчета (Mode).
Для параметра Mode доступны три варианта:
• MultiTasking (Многозадачный) – необходимо использовать, если в модели присутствуют
параллельно работающие подсистемы, и результат работы модели зависит от временных
параметров этих подсистем. Режим позволяет выявить несоответствие скорости и дискретности
сигналов, пересылаемых блоками друг другу.
• SingleTasking (Однозадачный) – используется для тех моделей, в которых недостаточно
строгая синхронизация работы отдельных составляющих не влияет на конечный результат
моделирования.
• Auto (Автоматический выбор режима) – позволяет Simulink автоматически устанавливать
режим MultiTasking для тех моделей, в которых используются блоки с различными скоростями
передачи сигналов и режим SingleTasking для моделей, в которых содержатся блоки,
оперирующие одинаковыми скоростями.
При выборе Variable-step в области появляются поля для установки трех параметров:
• Мах step size – максимальный шаг расчета. По умолчанию он устанавливается
автоматически (auto) и его значение в этом случае равно (SfopTime – StartTime)/50. Довольно
часто это значение оказывается слишком большим, и наблюдаемые графики представляют собой
ломаные (а не плавные) линии. В этом случае величину максимального шага расчета необходимо
задавать явным образом.
• Мin step size – минимальный шаг расчета.
• Initial step size – начальное значение шага моделирования.
При моделировании непрерывных систем с использованием переменного шага необходимо
указать точность вычислений: относительную (Relative tolerance) и абсолютную (Absolute
tolerance). По умолчанию они равны соответственно 10-3 и auto.
• Output options (Параметры вывода).
В нижней части вкладки Solver задаются настройки параметров вывода выходных сигналов
моделируемой системы (Output options). Для данного параметра возможен выбор одного из трех
вариантов:
• Refine output (Скорректированный вывод) – позволяет изменять дискретность
регистрации модельного времени и тех сигналов, которые сохраняются в рабочей области
MATLAB с помощью блока То Workspace. Установка величины дискретности выполняется в
строке редактирования Refine factor, расположенной справа. По умолчанию значение Refine
factor равно 1, это означает, что регистрация производится с шагом Dt = 1 (то есть для каждого
значения модельного времени). Если задать Refine factor равным 2, будет регистрироваться
каждое второе значение сигналов, 3 – каждое третье т. д. Параметр Refine factor может принимать
только целые положительные значения.
• Produce additional output (Дополнительный вывод) – обеспечивает дополнительную
регистрацию параметров модели в заданные моменты времени; их значения вводятся в строке
редактирования (в этом случае она называется Output times) в виде списка, заключенного в
квадратные скобки. При использовании этого варианта базовый шаг регистрации (Dt) равен 1.
Значения времени в списке Output times могут быть дробными числами и иметь любую точность.
• Produce specified output only (Формировать только заданный вывод) – устанавливает
вывод параметров модели только в заданные моменты времени, которые указываются в поле
Output times (Моменты времени вывода).
• Workspace I/O (Ввод/вывод данных в рабочую область) – Установка параметров
обмена данными с рабочей областью MATLAB.
Элементы вкладки разделены на 3 поля:
• Load from workspace (Загрузить из рабочей области). Если флажок Input (Входные
данные) установлен, то в расположенном справа текстовом поле можно ввести формат данных,
которые будут считываться из рабочей области MATLAB. Установка флажка Initial State
(Начальное состояние) позволяет ввести в связанном с ним текстовом поле имя переменной,
содержащей параметры начального состояния модели. Данные, указанные в полях Input и Initial
State, передаются в исполняемую модель посредством одного или более блоков In (из раздела
библиотеки Sources).
• Save to workspace (Записать в рабочую область) – Позволяет установить режим вывода
значений сигналов в рабочую область MATLAB и задать их имена.
• Save options (Параметры записи) – Задает количество строк при передаче переменных в
рабочую область. Если флажок Limit rows to last установлен, то в поле ввода можно указать
количество передаваемых строк (отсчет строк производится от момента завершения расчета). Если
флажок не установлен, то передаются все данные. Параметр Decimation (Исключение) задает шаг
записи переменных в рабочую область
(аналогично параметру Refine factor вкладки Solver). Параметр Format (формат данных)
задает формат передаваемых в рабочую область данных.
Доступные форматы Array (Массив), Structure (Структура), Structure With Time
(Структура с дополнительным полем – «время»).
• Diagnostics (Диагностика) – Выбор параметров диагностического режима.
Сообщения об ошибках или проблемных ситуациях, обнаруженных Simulink в ходе
моделирования и требующих вмешательства разработчика выводятся в командном окне MATLAB.
Исходный перечень таких ситуаций и вид реакции на них приведен в списке на вкладке
Diagnostics. Разработчик может указать вид реакции на каждое из них, используя группу
переключателей в поле Action (они становятся доступны, если в списке выбрано одно из
событий):
• None – игнорировать,
• Warning – выдать предупреждение и продолжить моделирование,
• Error – выдать сообщение об ошибке и остановить сеанс моделирования.
• Advanced (Дополнительно) – Установка дополнительных параметров.
• Simulation time (Интервал моделирования, или, иными словами, время расчета).
Время расчета задается указанием начального (Start time) и конечного (Stop time)
значений времени расчета. Начальное время, как правило, задается равным нулю. Величина
конечного времени задается пользователем исходя из условий решаемой задачи.