Тема урока: Предмет: Класс: Оборудование:
реклама

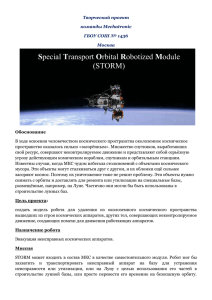
Тема урока: «Составление линейных алгоритмов для ЛЕГОроботов NXT» Предмет: Информатика Класс: 6 «в» Оборудование: мультимедийный проектор, интерактивная доска, Lego mindstorms education, ЛЕГО-роботы NXT, дидактические материалы (тест, листочки с распечатанными условиями задач), компьютеры. Формы работы: фронтальная, групповая, индивидуальная. Цели: Развивать представление учащихся об алгоритмах; Формировать представление о линейных алгоритмах; Вырабатывать навыки разработки линейных алгоритмов; Основные понятия урока: Алгоритм; Линейный алгоритм; Исполнитель. Ход урока 1. Организационный момент Приветствие учащихся. 2. Этап повторения Сегодня мы с вами продолжаем работать с исполнителем ЛЕГОробот NXT. Составим для него алгоритмы решения некоторых задач и удостоверимся в том, что ЛЕГО-робот NXT их решает. У робота имеется «мозг», устройство которое обрабатывает информацию и посылает команды – это сам микрокомпьютер NXT. 1. Как Вы думаете, с помощью чего робот получает информацию? (с помощью датчиков) 2. Какие части робота приводят его в движение, выполняют различные действия? (моторы) 3. Что используется для передачи информации, полученной датчиками к микрокомпьютеру («мозгу») и от микрокомпьютера к моторам? (провода) Давайте вспомним, как правильно называются элементы робота. Прошу вас перечислить те элементы, которые изображены на данном слайде. Посмотрите еще раз внимательно на пример данного робота, какие из элементов, которые вы знаете, отсутствуют здесь? (датчик освещенности) Разные датчики фиксируют изменение разных воздействий на робота. Датчик расстояния (ультразвуковой)– изменение расстояния, звуковой датчик (микрофон) – изменение громкости звука, световой датчик – изменение освещенности, датчик касания – реагирует на прикосновение и другие. 4. Как Вы думаете, как заставить робота решить какую либо задачу, например, перемещаться вперед? (написать для него алгоритм решения этой задачи) Прежде чем приступить к практической части урока назовите мне, пожалуйста, основные блоки действий в программе. Шаги алгоритма изображаются маленькими картинками – пиктограммами. 3. Этап практического применения знаний Учащимся предлагаются задачи для решения (распечатанные на листочках). Задача 1 Составьте алгоритм движения ЛЕГО-робота вперед в течение 3 секунд, поворота налево и движения назад в течение 2 секунд. вопросы ответ Какого типа алгоритм мы должны Линейный составить? Почему? Действия выполняются последовательно Составим возможный алгоритм решения этой задачи. В основной палитре выберем блок движение и поместим его на рабочей области для составления алгоритма выполним настройки, соответствующие условию задачи, движение вперед (оба двигателя В и С направление вперед) в течение 3 секунд. Далее выбираем блок движение и применяем настройки – поворот влево (отключаем двигатель В, двигатель С совершает один оборот) Опять выбираем блок движение и применяем настройки – движение назад (оба двигателя В и С направление назад) в течение 2 секунд. Составленный алгоритм надо передать роботу, чтобы он его выполнил. Для передачи будем использовать USB-кабель, который подключается к ЛЕГО-роботу и персональному компьютеру и контроллер в рабочей области. Задача 2 Представьте, что ваш робот автобус. Автобус двигается в следующем направлении: ул. Ленина остановка Филармония, далее следует по ул. Ленина к остановке Библиотека им. Герцена, после чего немного проезжая вперед сворачивает на ул. Преображенскую к остановке Музей К.Е. Циолковского. Составьте такую программу, чтобы автобус останавливался на остановках и объявлял их. Задача 3 Представьте, что ваш робот – это вы. Составьте программу, которая бы отражала ваш режим дня. В программе необходимо использовать блоки «Движение», «Экран», «Звук». 5. Подведение итогов Сохранение программ на сервере. Анализ полученных программ. Выставление оценок. 6. Домашнее задание Придумать задачу из своего опыта для ЛЕГО-робота, составить словесное описание решения данной задачи (например, 1 шаг – в основной палитре выберем блок «Движение» и зададим ему следующие настройки: подключаем мотор В и С, задаем движение вперед, мощность – 50, движение в течение 7 сек.; 2 шаг – т.д.)