файл
реклама

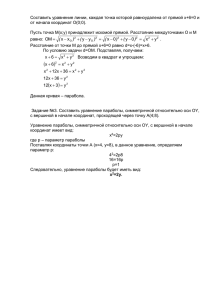
Лекция 5 по курсу «Линейная алгебра и аналитическая геометрия» 5. Кривые и поверхности второго порядка, собственные векторы матриц Кривые второго порядка http://antselitsky.narod.ru/library.htm В предыдущих лекциях мы изучали прямые линии и плоскости, они задаются уравнениями первой степени: ax + by + cz + d = 0. Сегодня мы узнаем, какие линии на плоскости описываются уравнением второго порядка Ax2 + Bxy + Cy2 + Dx + Ey + F = 0. (1) Для начала мы изучим эллипс, гиперболу и параболу, которые получаются в результате сечения кругового конуса плоскостями, не проходящими через его вершину. Эллипс получается, если секущая плоскость пересекает все образующие одной полости конуса (рис. 1, а); гипербола – если секущая плоскость пересекает обе полости конуса (рис. 1, б); парабола получается, если секущая плоскость параллельна одной из образующих конуса (рис. 1, в). В конце лекции мы покажем, что этими тремя линиями и линейными образами (то есть, прямыми) исчерпываются все линии, определяемые уравнениями второй степени. 1 Эллипс Определение 1. Эллипсом называется геометрическое место точек плоскости, для которых сумма расстояний до двух фиксированных точек этой плоскости, называемых фокусами, есть величина постоянная. y M(x, y) r1 r2 F1(-с, 0) 0 F2(-с, 0) x Рис. 2. Пусть F1 и F2 – фокусы. Выберем начало координат в середине отрезка F1F2. Ось Ox направим по отрезку F1F2, а Oy перпендикулярно вверх. Пусть 2c – длина отрезка F1F2, если c = 0, то F1 совпадает с F2 и мы получаем окружность. В этой системе координат фокусы имеют координаты F1(-с, 0), F2(с, 0). Обозначим через r1 и r2 расстояния от фокусов F1 и F2 до точки M на эллипсе, а через 2a постоянную сумму этих расстояний. Тогда условием того, что точка M принадлежит эллипсу, будет равенство r1 + r2 = 2a. (2) Нас будет интересовать случай, когда 2a > 2c, так как если 2a = 2c, то эллипс вырождается в отрезок F1F2. Найдем значения r1 и r2: r1 F1 M ( x c) 2 y 2 , r2 F2 M ( x c) 2 y 2 . Тогда условие (2) примет следующий вид: ( x c ) 2 y 2 ( x c ) 2 y 2 2a . Перенесем первый корень в правую часть: ( x c ) 2 y 2 2a ( x c ) 2 y 2 и возведем обе части полученного равенства в квадрат: ( x c ) 2 y 2 4a 2 4a ( x c ) 2 y 2 ( x c ) 2 y 2 . Выразим из последнего равенства корень: 4a ( x c ) 2 y 2 4a 2 ( x c ) 2 ( x c ) 2 , 4a ( x c) 2 y 2 4a 2 x 2 2 xc c 2 ( x 2 2 xc c 2 ), 2 ( x c) 2 y 2 a c x. a Возведем обе части последнего равенства в квадрат: ( x c) 2 y 2 a 2 2cx c2 2 x . a2 Раскроем скобки и приведем подобные слагаемые: c2 2 x 2cx c y a 2cx 2 x , a 2 2 2 2 4 2 2 2 2 a x a y a a c c x , 2 2 2 2 (a 2 c 2 ) x 2 a 2 y 2 a 2 (a 2 c 2 ). Так как 2a 2c 0 , то разность a2 – c2 > 0, обозначим ее через b2 = a2 – c2. Последнее равенство примет вид b2 x2 + a2 y2 = a2 b2. Разделив на a2b2, получим каноническое уравнение эллипса: x2 y2 1. a2 b2 (3) Замечание 1. Мы взяли точку на эллипсе и показали, что ее координаты удовлетворяют уравнению (3). Но при возведении в квадрат уравнение могло приобрести лишние корни. Можно проверить, что любая точка плоскости, координаты которой удовлетворяют уравнению (3), лежит на эллипсе. y b При x = 0 y b , при y = 0 x a . Определение 2. Величины a и b называют большой и малой полуосями эллипса соответственно. -a 0 a x -b Рис. 3. Гипербола Определение 3. Гиперболой называется геометрическое место точек плоскости, для которых абсолютная величина разности расстояний до двух фиксированных точек этой плоскости, называемых фокусами, есть величина постоянная. Как и в случае эллипса, обозначим фокусы F1 и F2. Расстояние между ними через 2c, а постоянную абсолютную величину разности расстояний r1 и r2 от фокусов до гиперболы через 2a. Но в этом случае 2a < 2c, так как разность двух сторон треугольника 3 меньше его третьей стороны. Условием того, что точка M принадлежит гиперболе, будет равенство |r1 – r2| = 2a. (4) Или в координатной записи: ( x c ) 2 y 2 ( x c ) 2 y 2 2a . Избавляясь от корней, так же как в случае эллипса, получим каноническое уравнение гиперболы: x2 y2 (5) 1, a2 b2 где b2 = c2 – a2. При y = 0 x a , а при x = 0 y ib , то есть оси Oy гипербола не пересекает. Определение 4. Величина a называется действительной полуосью гиперболы, а b – мнимой. b x являются асимптотами гиперболы, то есть такими прямыми, что a расстояние от гиперболы до них стремится к нулю, при возрастании x. Прямые y y b -a a x 0 -b Рис. 4. Если в уравнении (5) справа стоит -1, то есть y x2 y2 1 , a2 b2 b то, переписав его в виде -a a x 0 y2 x2 1, b2 a2 -b мы видим, что координаты как бы меняются местами. Это уравнение сопряженной гиперболы (рис. 5). 4 Рис. 5. Парабола Определение 5. Параболой называется геометрическое место точек плоскости, для которых расстояние до некоторой фиксированной точки этой плоскости равно расстоянию до некоторой фиксированной прямой, лежащей в той же плоскости. Указанная точка называется фокусом, а прямая – директрисой параболы. Мы будем рассматривать случай, когда фокус не лежит на директрисе, иначе, парабола выродилась бы в прямую перпендикулярную директрисе. Обозначим через p расстояние от фокуса F до директрисы. Выберем начало координат в середине отрезка FD, представляющего собой перпендикуляр, опущенный из фокуса F на директрису. Ось Ox направим по отрезку DF, а ось Oy перпендикулярно вверх. Тогда фокус F будет иметь координаты p , 0 , и расстояние r от фокуса до произвольной 2 точки на плоскости M(x, y) будет равняться y d M(x, y) r 0 D p 2 2 p F , 0 2 x p r x y 2 , а расстояние d от точки M(x, y) 2 Рис. 6. p до директрисы d x . Условие принадлежности точки M(x, y) параболе запишется в 2 виде r = d. (6) Или в координатной форме: 2 p p 2 x y x. 2 2 Избавляясь от корня, получим каноническое уравнение параболы: y2 = 2px. (7) Число p называется параметром параболы. Если p < 0, то парабола лежит слева от директрисы (x переходит в -x). Уравнения эллипса, гиперболы и параболы в полярных координатах Для точки параболы отношение расстояния до фокуса к расстоянию до директрисы равно единице. Для эллипса отличного от окружности и гиперболы можно указать такие прямые, называемые директрисами, что отношение расстояний до фокуса к расстоянию до директрисы, соответствующей фокусу, есть постоянная величина, которую мы обозначим через e. Выберем начало полярной системы координат (ρ, φ) в фокусе F. Обозначим через p расстояние от фокуса до директрисы. N K ρ φ Q p F Рис. 7. 5 M Отношение FM MK e , FM , а MK p cos . Отсюда получаем, что pe . 1 e cos (8) c b2 1 2 1 , а для параболы e = 1. Таким образом, уравнение (8) a a является уравнением эллипса при e < 1 и уравнением параболы при e = 1 в полярных Для эллипса e c b2 координатах. Для гиперболы e 1 2 1 , но она имеет две ветви, так что ее a a уравнение в полярных координатах имеет вид: pe 1 e cos , e > 1. pe 1 e cos (9) Наиболее просто в полярных координатах выглядит уравнение окружности: ρ = R. Уравнения директрис для эллипса и гиперболы имеют вид x (10) a . То есть, эллипс e директрисы пересекают, а гиперболу – нет. Кривые второго порядка. Классификация кривых второго порядка Теорема 1. Если в некоторой декартовой прямоугольной системе координат линия задается алгебраическим уравнением степени n, то в любой другой декартовой прямоугольной системе координат уравнение линии будет иметь такой же вид и порядок. Преобразованиями, которые переводят декартову прямоугольную систему координат xOy в другую декартову прямоугольную систему координат x′Oy′, являются поворот осей и перенос начала координат. Рассмотрим уравнение (1), при A2 + B2 + C2 ≠ 0, и попробуем привести его к наиболее простому виду. Предположим, что B ≠ 0. Покажем, что при помощи поворота всегда можно избавиться от члена, содержащего смешанное произведение координат Bxy. После поворота осей на угол φ старые координаты связаны с новыми формулами x = x′ cos φ – y′ sin φ, y = x′ sin φ + y′ cos φ. Перепишем уравнение (1) в новых координатах: Ax 2 Bxy Cy 2 Dx Ey F Ax 2 cos 2 2 Ax y sin cos Ay 2 sin 2 Bx 2 sin cos Bx y sin 2 Bx y cos 2 By 2 sin cos Cx 2 sin 2 2Cx y sin cos Cy 2 cos 2 6 Приравняем нулю получившийся коэффициент перед x′y′: – 2A sin φ cos φ – Bsin2φ + Bcos2φ + 2Csin φ cos φ = 0. Или (C – A) sin 2φ + B cos 2φ = 0. Если A = C, так как B ≠ 0, то cos 2φ = 0, то есть 4 . Если же A ≠ C, поделив на cos 2φ, B B 1 B , то есть arctg . Итак, в новой C A AC 2 AC повернутой системе координат уравнение (1) примет вид мы получим, что tg 2 Ax 2 C y 2 Dx E y F 0 . Теперь B = 0. Покажем, что переносом начала координат можно избавиться от членов первого порядка Dx и Ey в уравнении (1), которое будет иметь вид Ax2 + Cy2 + Dx + Ey + F = 0. (1′) Если система координат xOy получается из системы координат x′Oy′ переносом на вектор (x0, y0), то связь координат в этих системах задается следующими равенствами: x = x′ + x0, y = y′ + y0, Перепишем уравнение (1′) в новых координатах: Ax 2 Cy 2 Dx Ey F Ax 2 2 Axx0 Ax02 Cy 2 2Cy y0 Cy02 Dx Dx 0 Ey Ey0 F 0. Обозначим через F′ свободный член: F Ax02 Cy02 Dx 0 Ey0 F . Приравняем нулю коэффициенты при x′ и y′: 2Ax0 + D = 0, 2Cy0 + E = 0, Если A = 0, то D = 0, если C = 0, то E = 0, и уравнение (1′) не содержит членов первого порядка. Поэтому предположим, что A ≠ 0 и C ≠ 0. Тогда для координат вектора (x0, y0) мы получим следующие выражения: D E x0 , y0 . 2A 2C В новых координатах уравнение (1′) примет вид Ax 2 Cy 2 F 0 . Мы показали, что всегда найдется такая система координат, в которой уравнение (1) линии второго порядка будет иметь вид Ax 2 By 2 1 , если F′ ≠ 0, или Ax 2 By 2 0 , если F′ = 0. 7 Теорема 2. Пусть в декартовой прямоугольной системе координат линия задается уравнением (1). Тогда существует система координат, в которой уравнение (1) линии второго порядка принимает один из следующих девяти канонических видов: x2 y2 1. 2 2 1 – уравнение эллипса; a b 2. x2 y2 1 – уравнение мнимого эллипса; a2 b2 3. x2 y2 1 – уравнение гиперболы; a2 b2 4. y2 = 2px – уравнение параболы; x2 y2 5. 2 2 0 – уравнение пары пересекающихся прямых; a b 6. x2 y2 0 – уравнение пары мнимых пересекающихся прямых; a2 b2 7. y2 – b2 = 0 – уравнение пары параллельных прямых; 8. y2 + b2 = 0 – уравнение пары мнимых параллельных прямых; 9. y2 = 0 – уравнение пары совпадающих прямых. 8