Задача С2
реклама

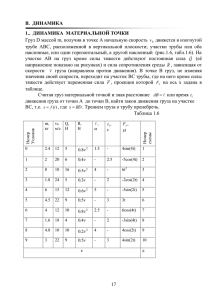
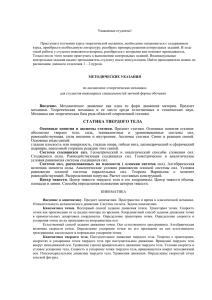
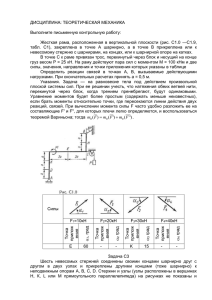
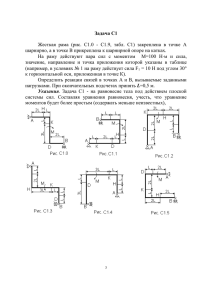
МЕТОДИЧЕСКИЕ УКАЗАНИЯ по теоретической механике для студентов заочной (3 и 4 семестры) и заочноускоренной (3 семестр) форм обучения Специальности С, ПТ, АД, Т, В ТЕОРЕТИЧЕСКАЯ МЕХАНИКА РАБОЧАЯ ПРОГРАММА Введение. Механическое движение как одна из форм движения материи. Предмет механики. Теоретическая механика и ее место среди естественных и технических наук. Механика как теоретическая база ряда областей современной техники. СТАТИКА ТВЕРДОГО ТЕЛА Основные понятия и аксиомы статики. Предмет статики. Основные понятия статики: абсолютно твердое тело, сила, эквивалентные и уравновешенные системы сил, равнодействующая, силы внешние и внутренние. Аксиомы статики. Связи и реакции связей. Основные виды связей: гладкая плоскость или поверхность, гладкая опора, гибкая нить, цилиндрический и сферический шарниры, невесомый стержень реакции этих связей. Система сходящихся сил. Геометрический и аналитический способы сложения сил. Сходящиеся силы. Равнодействующая сходящихся сил. Геометрическое и аналитические условия равновесия системы сходящихся сил. Система сил, расположенных на плоскости ( плоская система сил). Алгебраическая величина момента силы. Аналитические условия равновесия плоской системы сил. Условия равновесия плоской системы параллельных сил. Теорема Вариньона о моменте равнодействующей. Распределенная нагрузка. Расчет составных конструкций. Центр тяжести. Центр тяжести твердого тела и его координаты. Центр тяжести объема, площади и линии. Способы определения положения центров тяжести. КИНЕМАТИКА Введение в кинематику. Предмет кинематики. Пространство и время в классической механике. Относительность механического движения. Система отсчета. Задачи кинематики. Кинематика точки. Векторный способ задания движения точки. Траектория точки. Скорость точки как производная от ее радиус-вектора по времени. Координатный способ задания движения точки в прямоугольных декартовых координатах. Определение траектории точки. Определение скорости и ускорения точки по их проекциям на координатные оси. Естественный способ задания движения точки. Оси естественного трехгранника. Алгебраическая величина скорости точки. Определение ускорения точки по его проекциям на оси естественного трехгранника: касательное и нормальное ускорения точки. Кинематика твердого тела. Поступательное движение твердого тела. Теорема о траекториях, скоростях и ускорениях точек твердого тела при поступательном движении. Вращение твердого тела вокруг неподвижной оси. Уравнение (закон) вращательного движения твердого тела. Угловая скорость и угловое ускорение тела. Скорость и ускорение точки твердого тела, вращающегося вокруг неподвижной оси. Плоскопараллельное движение твердого тела. Уравнения движения. Определение скоростей точек плоской фигуры. ДИНАМИКА Введение в динамику. Предмет динамики. Основные понятия и определения: масса, материальная точка, сила. Законы механики Галилея-Ньютона. Инерциальная система отсчета. Задачи динамики. Динамика точки. Дифференциальные уравнения движения свободной материальной точки в декартовых координатах. Две основные задачи динамики для материальной точки. Решение первой задачи динамики. Решение второй задачи динамики. Начальные условия. Постоянные интегрирования и их определение по начальным условиям. Примеры интегрирования дифференциальных уравнений движения точки в случаях силы, зависящей от времени, от положения точки и от ее скорости. Введение в динамику механической системы. Механическая система. Классификация сил, действующих на систему: силы активные (задаваемые) и реакции связей; силы внешние и внутренние. Свойства внутренних сил. Масса системы. Центр масс; радиус-вектор и координаты центра масс. Общие теоремы динамики. Дифференциальные уравнения движения механической системы. Теорема о движении центра масс механической системы. Закон сохранения движения центра масс. Количество движения материальной точки. Элементарный импульс силы. Импульс силы за конечный промежуток времени. Теорема об изменении количества движения точки в дифференциальной и в конечной формах. Количество движения механической системы; его выражение через массу системы и скорость ее центра масс. Теорема об изменении количества движения механической системы в конечной форме. Закон сохранения количества движения механической системы. Момент количества движения материальной точки относительно центра и относительно оси. Теорема об изменении момента количества движения точки. Главный момент количеств движения или кинетический момент механической системы относительно центра и относительно оси. Кинетический момент вращающегося твердого тела относительно оси вращения. Теорема об изменении кинетического момента механической системы. Закон сохранения кинетического момента механической системы. Кинетическая энергия материальной точки. Элементарная работа силы; аналитическое выражение элементарной работы. Работа силы, на конечном перемещении точки ее приложения. Работа силы тяжести, силы упругости и силы тяготения. Мощность. Теорема об изменении кинетической энергии точки. Кинетическая энергия механической системы. Кинетическая энергия твердого тела при поступательном движении, при вращении вокруг неподвижной оси и при плоскопараллельном движении тела. Теорема об изменении кинетической энергии механической системы. Равенство нулю суммы работ внутренних сил в твердом теле. Работа и мощность сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси. Принцип Даламбера. Сила инерции материальной точки. Принцип Даламбера для материальной точки и механической системы. СПИСОК ЛИТЕРАТУРЫ Воронков И.М. Курс теоретической механики. М., 1954 и последующие издания. Гернет М.М. Курс теоретической механики. М., 1970 и последующие издания. Тарг С.М. Краткий курс теоретической механики. М., 1963 и последующие издания. Мещерский И.В. Сборник задач по теоретической механике. М., 1970 и последующие издания. Сборник задач по теоретической механике. / Под ред. К. С. Колесникова. М., 1983. Сборник задач для курсовых работ по теоретической механике. / Под ред. А.А. Яблонского. М., 1972 и последующие издания. (Содержит примеры решения задач.) СОДЕРЖАНИЕ ЗАДАНИЙ, ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТ, ОБЩИЕ ПОЯСНЕНИЯ К ТЕКСТУ ЗАДАЧ Контрольное задание по теоретической механике состоит из шести задач - С1, С2,К1, К2, Д1, Д2. Методические указания по решению задач, входящих в контрольные задания, даются для каждой задачи после изложения ее текста под рубрикой "Указания"; затем дается пример решения аналогичной задачи. Цель примера - разъяснить ход решения, но не воспроизвести его полностью. Поэтому в ряде случаев промежуточные расчеты опускаются. Но при выполнении задания все преобразования и числовые расчеты должны быть обязательно последовательно проделаны с необходимыми пояснениями; в конце должны быть даны ответы. ЗАДАЧИ К КОНТРОЛЬНЫМ ЗАДАНИЯМ СТАТИКА Задача С1 Жесткая рама (рис. С 1.0 - С1.9, табл. С1) закреплена в точке А шарнирно, а в точке В прикреплена к шарнирной опоре на катках. На раму действуют пара сил с моментом М=100 Н·м и сила, значение, направление и точка приложения которой указаны в таблице (например, в условиях № 1 на раму действует сила F1 = 10Н под углом 30° к горизонтальной оси, приложенная в точке К). Определить реакции связей в точках А и В, вызываемые заданными нагрузками. При окончательных подсчетах принять l = 0,5 м. Указания. Задача С 1 - на равновесие тела под действием плоской системы сил. Составляя уравнения равновесия, учесть, что уравнение моментов будет более простым (содержать меньше неизвестных), если брать моменты относительно точки, где пересекаются линии действия двух реакций связей (в данном случае относительно точки В). При вычислении момента силы F часто удобно разложить ее на составляющие F/ и F//, для которых плечи легко вычисляются, в частности на составляющие, параллельные координатным осям, и воспользоваться теоремой Вариньона; тогда m0 (F) = m0 (F' )+m0 (F" ) Пример С1. Жесткая рама АВС ( рис. С1 ) имеет в точке В неподвижную шарнирную опору, а в точке С подвижную шарнирную опору на катках. Все действующие нагрузки и размеры показаны на рисунке. Дано: F=25 кН, α =60°, β=30°, М=50 кН·м, l=0,5 м Определить: реакции в точках В и С, вызываемые действующими нагрузками. Решение. Рассмотрим равновесие рамы. Проведем координатные оси ХУ и изобразим действующие, на раму силы: силу F, пару сил с моментом М и реакции связей Хв, VB, RC (реакцию неподвижной шарнирной опоры В изображаем двумя ее составляющими, реакция шарнирной опоры на катках направлена перпендикулярно опорной плоскости. Составим три уравнения равновесия плоской системы сил. При вычислении момента силы F относительно точки В воспользуемся теоремой Вариньона, т.е. разложим силу F на составляющие F', F" (F'=F cos α, F" =F sin α) и учтем, что mв (F)= mв (F' )+ mв (F" ). Получим : ΣFkx = 0, Хв + Rc sinβ - F cosα = 0; ΣFky = 0, YB + Rc cosβ + F sinα = 0; ΣmB (Fk)= 0, M – Rc cosβ • 4l + F cosα • 21 = 0. Подставив в составленные уравнения числовые значения заданных величин, и решив эти уравнения, определим искомые реакции. Ответ: Хв = - 5,5 кН, YB = 9,6 кН, Rc =36,1 кН. Знаки указывают, что сила Хв направлена противоположно показанной на рис.С1. Задача С2 Рама, состоящая из двух абсолютно твердых ломаных стержней, соединенных между собой шарниром, (рис. С2.0 - С2.9, табл. С2) закреплена в точке А жесткой заделкой, а в точке В прикреплена к шарнирной опоре на катках. Положение шарнира указано в табл.С2. На раму действуют пара сил с моментом М=100 Нм и сила, значение, направление и точка приложения которой указаны в таблице (например, в условиях № 1 на раму действует сила F1 = 10 H под углом 30° к горизонтальной оси, приложенная в точке D), а также распределенная нагрузка интенсивностью q=20 Н/м, приложенная на участке, указанном в таблице. Если распределенная нагрузка приложена на горизонтальном участке, то она действует вниз, а если на вертикальном, то вправо. Определить реакции связей в точках А и В, вызываемые заданными нагрузками, а также реакцию внутренней связи. При окончательных подсчетах принять L=0,5 м. Указания. Задача С2 - на равновесие составных конструкций под действием плоской системы сил. Для определения всех силовых факторов в заделке и реакций шарнирной опоры и внутренней связи необходимо рассмотреть равновесие каждого тела, из которых состоит рама, отдельно, учитывая, что силы взаимодействия между телами равны по величине и противоположны по направлению. Пример С 2. Рама, состоящая из двух изогнутых стержней, соединенных между собой шарниром С, закреплена в точке А жесткой заделкой, а в точке В прикреплена к шарнирной опоре на катках. Определить реакции связей в точках А и B, вызываемые заданными нагрузками , а также реакцию внутреннего шарнира С (рис. С2,а). Дано: F=20Н, М=50 НМ, q=10H/м. Решение. Рассмотрим равновесие отдельных участков рамы, разделив ее в шарнире С. При этом к левому участку рамы (рис С2,в) согласно аксиоме отбрасывания связей будут приложены силы реакции опоры ВRВ и реакция в шарнире С, которую разложим на две сое являющие Хс и Yс, а на правую (рис.С2,б) - реакции заделки: силы Ха и Yа, реактивный момент Ма, реакции шарнира С: Х /с и Y/с, модули которых равны Хс и Yс, а направление противоположно. Составим уравнения равновесия плоской системы сил, приложенной к правой части рамы (рис.С2,в). 1.Σ Fkx=Xc – Fcos 60=0: 2.Σ Fky = Yc – F sin 60 + RB = O; 3.Σ mc (Fk)=3RB - 1,5F sin 60 = 0. Из (1): Xc = F cos 60 = 10H, из (3): RB = 1,5F sin 60 / 3 = 1,5 • 20 • 0,866 / 3 = 8.66H из(2) Yc , = F sin 60 - RB = 20 • 0,866 - 8,66 = 8,66H Затем составим уравнения равновесия плоской системы сил, приложенной к правой части рамы (рис.С2,б). При этом распределенную нагрузку заменяем равнодействующей Q = 3q = 30 H, приложенной в центре участка приложения нагрузки. 4. Σ Fkx=XА -X'С+Q=0 5. Σ Fky=YА-Y'С=0 6. Σ mА (Fk)=MА - M+1,5Q-3X'c-2Y'c=0 Из этих уравнений находим: X= X'С - Q= -20 H YA = Y'C = 8,66 H. МA = М -1,5Q+3X'c +2Y'= 50-1,5 ·30 +3·10 +2 ·8,66=18,7 Hм. КИНЕМАТИКА Задачи К1 Точка В движется в плоскости хy (Табл. К 1.1, К 1.2). Закон движения точки задан уравнениями: x= f1( t), y=f2( t), где х и у выражены в сантиметрах, t - в секундах. Найти уравнение траектории точки; для момента времени ti = lc определить скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории. Зависимость x= f1( t) указана в табл. К1.1, а зависимость y=t2(t) дана в табл. К1.2 (для вар.О - 2 в столбце 2, для вар.З - 6 в столбце 3, для вар.7 - 9 в столбце 4). Номер варианта в табл. К 1.1 выбирается по предпоследней цифре шифра, а номер условия в табл. К1.2 - по последней. Указания. Задача К1 относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются касательное, и нормальное ускорения точки. В данной задаче все искомые величины нужно определить только для момента времени ti=lc. Пример К1. Даны уравнения движения точки в плоскости ху : x=2t, y=t2 (1) (х, у - в сантиметрах, t - в секундах). Определить уравнение траектории точки; для момента времени t1 = 1 с найти скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории. Решение . Для определения уравнения траектории точки исключим из заданных уравнений движения время t. Отсюда находим следующее уравнение траектории точки (парабола, рис. К 1):у = х2/4 (2) Скорость точки найдем по ее проекциям на координатные оси: и при t=1с: V1x,=2cм/c, Viy= 2 см/с, V1y =2,83 см/с. (З) Аналогично найдем ускорение точки : Касательное ускорение найдем, дифференцируя по времени равенство V²=V²x+V2y. Получим (5) Числовые значения всех величин, входящих в правую часть выражения (5), определены и даются равенствами (3) и (4). Подставив в (5) эти числа, найдем сразу, что при t1=l с 1 a1τ =1,4 см/с2. Нормальное ускорение точки аn = √а² – а² ד. Подставляя сюда a1τ и a1τ , получим, что при t1= 1 с a1n= 1,43 см/с2.Радиус кривизны траектории р = V2/an. Подставляя сюда числовые значения V1 и a1n, найдем, что при t1=1 с p1=5,59 см. найденные числовые значения Задача К2 Механизм состоит из ступенчатых колес 1, 2, связанных ременной передачей, зубчатой рейки 3 и груза 4, привязанного к концу нити, намотанной на одно из колес (рис. К2.0 - К2.9, табл. К2). Радиусы ступеней колес равны соответственно : у колеса 1- r1= 2 см, R1 = 4 см, у колеса 2– r2 = 6 см, R2 = 8 см. На ободьях колес расположены точки А и В. В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ1(t) - закон вращения колеса 1, S3(t) - закон движения рейки 3, ω2 - закон изменения угловой скорости колеса 2, V4(t) - закон изменения скорости груза 4 и т.д. (везде φ выражено в радианах, s - в сантиметрах, t - в секундах). Положительное направление для (φ и ω- против хода часовой стрелки, для S3, S4 и VЗ, V4 - вниз. Определить в момент времени t1 = 2 с указанные в таблице в столбцах "Найти" скорости (v - линейные, ω угловые) и ускорения (а - линейные, ε - угловые) соответствующих точек или тел (v4 - скорость груза 4 и т.д.). Указания. Задача К2 - на исследование вращательного движения твердого тела вокруг неподвижной оси. При решении задачи учесть, что, когда два колеса находятся в зацеплении, скорость точки зацепления каждого колеса одна и та же, а когда два колеса связаны ременной передачей, то скорости всех точек ремня и, следовательно, точек, лежащих на ободе каждого из этих колес, в данный момент времени численно одинаковы; при этом считается, что ремень по ободу колеса не скользит. Пример К2. Рейка 1, ступенчатое колесо 2 с радиусами R2 и r2; и колесо 3 радиуса Rз, скрепленное с валом радиуса rз, находятся в зацеплении; на вал намотана нить с грузом 4 на конце ( рис. К2). Рейка движется по закону S1=f( t). Дано: R.2=6 см, r2=4 см, Rз=8 см, rз=3 см, S1 =3t³ (s - в сантиметрах, t - в секундах), А - точка обода колеса 3, t1=3 с. Определить: ω3, V4, ε3, aA, в момент времени t = t1 Решение. Условимся обозначать скорости точек, лежащих на внешних ободах колес (радиуса Ri ), через vi а точек, лежащих на внутренних ободах (радиуса гi,), - через ui;. Определяем сначала угловые скорости всех колес как функции времени t. Зная закон движения рейки 1, находим ее скорость : (1) Так как рейка и колесо 2 находятся в зацеплении, то v2 = v1 или W2R2 = V1. Но колеса 2 и 3 тоже находятся в зацеплении, следовательно, u2 = vз или w2R2 = w3R3. Из этих равенств находим (2) Тогда для момента времени t1 = 3с получим wз = 6,75 с-1 . Определяем v4. Так как v4 = vв = ωзrз, то при t1=3с v4=20,25 см/с. Определяем εз. Учитывая второе из равенств (2), получим Тогда при t1=3с ε3 =4,5c-2 Определяем αА. Для точки А τ , где численно α А =R3ε3, α n А =R3w23. Тогда для момента времени t1=3с имеем Все скорости и ускорения точек, а также направления угловых скоростей показаны на рис.К2. ДИНАМИКА Задача Д1 Груз D массой т, получив в точке А начальную скорость V0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис. Д1.0 - Д1.9, табл. Д1). На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках). В точке В груз, не изменяя своей скорости, переходит на участок ВС трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой FX на ось х задана в таблице. Считая груз материальной точкой и зная расстояние АВ = l или время t1 движения груза от точки А до точки В, найти закон движения груза на участке ВС, т.е. х = f(t), где х = BD. Трением груза о трубу пренебречь. Указания. Задача Д1 - на интегрирование дифференциальных уравнений движения точки (решение основной задачи динамики). Решение задачи разбивается на две части. Сначала нужно составить и проинтегриро-вать методом разделения переменных дифференциальное уравнение точки (груза) на участке АВ, учтя начальные условия. Затем, зная время движения груза на участке АВ или длину этого участка, определить скорость груза в точке В. Эта скорость будет начальной для движения груза на участке ВС. После этого нужно составить и проинтегрировать дифференциальное уравнение движения груза на участке ВС тоже с учетом начальных условий, ведя отсчет времени от момента, когда груз находится в точке В, и полагая в этот момент t = 0. При интегрировании уравнения движения на участке АВ в случае, когда задана длина l участка, целесообразно перейти к переменному х, учтя, что Дано: m = 2 кг, R = v2, где = 0.4 кг/м, vo = 5 м/с, / = 2.5 м, Fx = 16sin(4t). Определить: x= f(t) - закон движения груза на участке ВС. Пример Д1. На вертикальном участке АВ трубы (рис. Д1) на груз D массой m действуют сила тяжести R и постоянная сила Q; расстояние от точки А, где v = v0, до точки В равно l. На наклонном участке ВС на груз действуют сила тяжести и переменная сила F = F(t), заданная в ньютонах. Решение. Рассмотрим движение груза на участке АВ, считая груз материальной точкой. Изображаем груз (в произвольном положении) и действующие на него силы Р= mg и R. Проводим ось Аz и составляем дифференциальное уравнение движения груза в проекции на эту ось : (1) Далее находим Рz = Р = mg, Rz = - R =v2 ; подчеркиваем, что в уравнении все переменные силы надо обязательно выразить через величины, от которых, они зависят. Учтя еще, что Vz = V, получим (2) Введем для сокращения записей обозначения (3 ) где при подсчете принято g 10 м/с2. Тогда уравнение (2) можно представить в виде (4) Разделяя в уравнении (4) переменные, а затем, беря от обеих частей интегралы, получим (5) По начальным условиям при z = 0 v = v0 , что дает C1= ln( vo 2 – n ), и из равенства (5) находим ln (v2 - n) = 2kz + ln (vo2 - n) или ln (v2 - n) - ln (vo2 - n) = -2kz. Отсюда В результате находим (6) Полагая в равенстве (6) z = l = 2.5 м и заменяя k и n их значениями (3), определим скорость VB груза в точке В (V0 = 5 м/с, число е =2.7) : V²B = 50 - 25/е =40.7 и VB = 6.4 м/с . (7) Теперь рассмотрим движение груза на участке ВС; найденная скорость VB будет для движения на этом, участке начальной скоростью (V0 = Vв). Изображаем груз (в произвольном положении) и действующие на него силы Р = mg , N и F. Проведем из точки В ось Вх и составим дифференциальное уравнение движения груза в проекции на эту ось : (8) Так как Рx = P sin30° = 0.5 mg , Nx = 0 , Fx = 16sin(4t), то уравнение (8) примет вид (9) g 10 м/с², получим Разделив обе части равенства на m = 2 кг и полагая опять (10) Умножая обе части уравнения (10) на dt и интегрируя, найдем Vx = 5t - 2cos(4t) + С2 (11) Будем теперь отсчитывать время от момента, когда груз находится в точке В, считая в этот момент t = 0. Тогда при t = О vx = vo = vв, где vв дается равенством (7). Подставляя эти величины в (11), получим С2 = vв + 2 cos 0 = 6.4 + 2 = 8.4 (12) Умножая здесь обе части на dt и снова интегрируя, найдем х = 2.5 t2 - 0.5 sin (4t) + 8.4t + Сз (13) Так как при t=0 х = 0, то Сз = 0 и окончательно искомый закон движения груза будет х = 2.5t2 + 8.4t - 0.5sin(4t), (14) где х - в метрах, t - в секундах. Задача Д2 Механическая система состоит из грузов 1 и 2 (коэффициент трения грузов о плоскость f = 0,1) и ступенчатых шкивов 3 и 4 с радиусами ступеней R3 = 0,3 м, rз= 0,1 м, R4 = 0,2 м, r4 = 0,1 м (массу каждого шкива считать равномерно распределенной по его внешнему ободу) (рис.Д2.0-Д2.9, табл. Д2).Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Под действием постоянной силы F система приходит в движение из состояния покоя. При движении системы на шкивы 3 и 4 действуют постоянные моменты сил сопротивлений, равные соответственно Мз и M4. Определить значение искомой величины в тот момент времени, когда перемещение точки приложения силы F равно s1. Искомая величина указана в столбце "Найти" таблицы, где обозначено: V1 - скорость груза 1,, 3- угловая скорость тела 3 и т.д. Указания. Задача ДЗ - на применение теоремы об изменении кинетической энергии системы. При решении задачи учесть, что кинетическая энергия системы равна сумме кинетических энергий всех входящих в систему тел: эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. При определении работы все перемещения следует выразить через заданное перемещение S1, учтя, что зависимоcть между перемещениями здесь будет такой же, как между соответствующими скоростями. Когда по данным таблицы m2=О, груз 2 на чертеже не изображать; шкивы 3 и 4 всегда входят в систему. ПримерД2. Механическая система состоит из грузов 1 массой 4 кг и 2 массой 6 кг (коэффициент трения грузов о плоскость f=0,1) и ступенчатого шкива 3 массой 8 кг с радиусами ступеней R3=0,3 м, r3=0,1 м, (массу шкива считать равномерно распределенной по его внешнему ободу) (рис. Д2). Тела системы соединены друг с другом нитями, намотанными на шкивы: участки нитей параллельны соответствующим плоскостям. Под действием постоянной силы F = 50H система приходит в движение из состояния покоя. Решение. Применяем теорему об изменении кинетической энергии системы: для неизменяемой системы изменение кинетической энергии при ее некотором перемещении равно сумме работ внешних сил Кинетическая энергия системы в начальный момент времени То=0, так как система находилась в покое. Кинетическая энергия системы в конечный момент времени равна Т Т сумме кинетической энергии всех входящих в нее тел: Т=Т1+Т2+Т3, где кинетическая энергия тел 1 и 2, совершающих поступательное движение, кинетическая энергия тела 3, совершающего вращательное движение. Находим соотношение между скоростями: w 3 Осевой момент инерции тела 3 находится так же, как и однородного кольца: так как масса распределена по его внешнему ободу) Подставляя эти значения в формулу кинетической энергии, получим: Подставляя значения масс тела получим: Вычисляем сумму работ внешних сил: A(F)=FS1=50 Дж - работа постоянной силы F, A(P1)=m1gh=m1S1sinα =28,3Дж - работа силы тяжести тела 1, (h- вертикальное перемещение тела 1), А(М)= -М3 = -MS1/R3 = - 2 ДЖ -работа вращающего момента, (3- угол поворота тела 3), A(FTP1)= -FTP1S1= -f N1S1= -fm1gcosαS1 = -2,83 Дж -работа силы трения, приложенной к телу 1, (N1= m1gcosα- нормальная реакция плоскости, на которой расположено тело 1), А(FTP2)= -FTP2S2= -f N2S2= -f m2gS1/3= - 2 Дж- работа силы трения, приложенной к телу 2, (N2=m2g - нормальная реакция плоскости, на которой расположено тело 1). Работа остальных внешних сил - сил Р2, Рз, N1, N2 ,N3 равна нулю, так как силы Р2, N1, N2 перпендикулярны направлению перемещения, а силы Р3 и N3 приложены в неподвижной точке. Подставляя значения, определяем сумму работ внешних сил: Σ A(Fke ) = 50 + 28,3 - 2 - 2,83 -2=71,5Дж. Подставляя значения кинетической энергии и работы внешних сил в теорему об изменении кинетической энергии получим: 6V12 =71,5, откуда V1 = √ 71,5/6 = 3,45 м / с. Методические указания по дисциплинам теоретическая механика, теоретическая и прикладная механика для студентов заочной формы обучения.