task_18513x
реклама

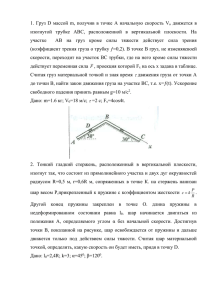
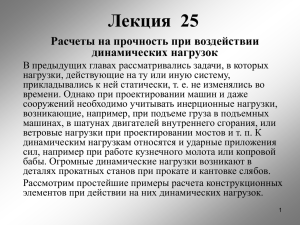
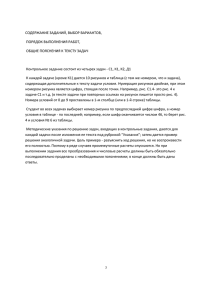
В. ДИНАМИКА 1.. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Груз D массой m, получив в точке A начальную скорость v 0 движется в изогнутой трубе ABC, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис.1.6, табл.1.6). На участке AB на груз кроме силы тяжести действуют постоянная сила Q (её направление показано на рисунках) и сила сопротивления среды R , зависящая от скорости v груза (направлена против движения). В точке B груз, не изменяя значения своей скорости, переходит на участок BC трубы, где на него кроме силы тяжести действует переменная сила F , проекция которой Fx на ось x задана в таблице. Считая груз материальной точкой и зная расстояние AB или время t1 движения груза от точки A до точки B, найти закон движения груза на участке BC, т.е. x f (t ) , где x BD . Трением груза о трубу пренебречь. Таблица 1.6 Q, H R, H , м t1 , с Fx , 0 2.4 12 5 0.8v 2 1.5 - 4sin(4t) 1 1 2 20 6 0.4v - 2.5 -5cos(4t) 2 2 8 10 16 0.5v 2 4 - 6t2 3 3 1.8 24 5 0.3v - 2 -2cos(2t) 4 4 6 15 12 0.6v 2 5 - -5sin(2t) 5 5 4.5 22 9 0.5v - 3 3t 6 6 4 12 10 0.8v 2 2.5 - 6cos(4t) 7 7 1.6 18 4 0.4v - 2 -3sin(4t) 8 8 4.8 10 10 0.2v 2 4 - 4cos(2t) 9 9 3 22 9 0.5v - 3 4sin(2t) 10 е Н Номер схемы v0 м/c Номер Условия m, кг д 17 A 1 Q DQ D С D A B 30° x D С 30° c 30° x С x 2 B С 3 D B D D D Q A B 30° A 30 A 30° С 5 Q 4 Q x x D Q A B 6 D D B D 30° ° С 30° x D Q B С A D С x 8 D 30 D A 7 ° Q B 30° x A Q С Q D B D B 9 D x D С A 30° 30° x Рис.1.6 18 10 00 2. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ Механическая система состоит из грузов 1 и 2 (коэффициент трения грузов о плоскость f 0.1 ), цилиндрического сплошного однородного катка 3 и ступенчатых шкивов 4 и 5 с радиусами ступеней R4 0.3 м, r4 0.1 м, R5 0.2 м, r5 0.1 м (массу каждого шкива считать равномерно распределенной по его внешнему ободу) (рис. 1.7, табл.1.7). Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Под действием силы F f (s) , зависящей от перемещения точки приложения силы, система приходит в движение из состояния покоя. При движении системы на шкивы 4 и 5 действуют постоянные моменты сил сопротивлений, равные соответственно M4 и M5 . Определить значение искомой величины в тот момент времени, когда перемещение точки приложения силы F равно s1 . Искомая величина указана в столбце "Найти" таблицы, где обозначено: v1 - скорость груза 1, vc3 скорость центра масс катка 3, 4 угловая скорость тела 4 и т.д. m1 кг m2 кг m3 кг m4 кг m5 кг M4 Нм M5 Нм F f (s ) Н s1 м Найти Номер схемы. Номер условия Таблица 1.7 0 1 2 6 0 0 4 2 6 0 0 8 0 0.6 0.8 0 50(2+3s) 20(5+2s) 1.0 1.2 1 2 2 0 4 6 8 0 0 0.4 80(3+4s) 0.8 v1 5 vc3 3 4 5 6 7 0 8 8 0 0 2 0 0 6 4 4 2 4 2 6 0 6 0 8 0 10 0 6 0 10 0.3 0 0.9 0 0.6 0 0.6 0 0.8 0 40(4+5s) 30(3+2s) 40(3+5s) 60(2+5s) 30(8+3s) 0.6 1.4 1.6 1.0 0.8 v2 4 v1 4 5 4 5 6 7 8 8 6 0 4 0 8 0.3 0 40(2+5s) 1.6 vc3 9 9 0 4 6 10 0 0 0.4 50(3+2s) 1.4 е v2 3 10 д 19 5 4 2 1 1 45˚ 2 2 60˚ 60˚ 3 1 2 3 F 5 3 4 4 F 30˚ 4 5 1 30˚ 3 1 2 5 60˚ 3 45˚ F F 2 30˚ 45˚ 4 5 2 60˚ 2 4 4 5 1 1 3 3 5 30˚ F 45˚ F 45˚ 6 60˚ 4 1 5 5 30˚ 60˚ F 3 7 1 30˚ 3 45˚ 8 5 5 4 1 3 45˚ 3 4 1 9 F 45˚ 60˚ 2 4 2 2 30˚ F F Рис.1.7 20 2 30˚ 10 0 60˚ 3. ПРИНЦИП ДАЛАМБЕРА Вертикальный вал АК (рис. 1.8), вращающейся с постоянной угловой скоростью 10 с-1, закреплен подпятником в точке А и цилиндрическим подшипником в точке, указанной в табл.1.8 в столбце 2 (AB=BD=DE=EK=b). К валу жестко прикреплены невесомый стержень 1 длиной 1 0.4 м с точечной массой m1 6 кг на конце и однородный стержень 2 длиной 2 0.6 м, имеющий массу m2 4 кг; оба стержня лежат в одной плоскости. Точки крепления стержней к валу указаны в таблице в столбцах 3 и 4, а углы и - в столбцах 5 и 6. Пренебрегая весом вала, определить реакции подпятника и подшипника. При окончательных подсчетах принять b 0.4 м. Таблица 1.8 Подшипник в точке Стержня 1 в точке Стержня 2 в точке 0 1 2 3 4 5 6 7 8 9 B D E K B D E K D E D B D D E K B E E K K E B E D B K B K D е 0 0 30 45 60 75 90 30 45 60 75 90 45 60 75 30 60 45 30 75 60 45 Номер схемы Номер Условия Крепление 1 2 3 4 5 6 7 8 9 10 д 21 1 2 K K β K 3 E β E E 2 D D 1 α B α 1 A K 5 E 1 D α K 2 β A 7 A α E D B 1 1 α B B α K 2 α α 8 D E K α 10 E 9 β β 2 2 B 2 A K 1 β B A β 2 B D B D D 1 A E β β E α K E 2 A A 6 D 2 1 1 B K 4 β 2 1 D B A A Рис.1.8 22