Зубарев Ю.М.- Расчет и проектирование приспособлений в машиностроении (Учебники для вузов) - 2015
реклама
 - 2015")
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
•САНКТПЕТЕРБУРГ
•МОСКВА
•КРАСНОДАР
2015
Powered by TCPDF (www.tcpdf.org)
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Powered by TCPDF (www.tcpdf.org)
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Ю. М. ЗУБАРЕВ
РАСЧЕТ
И ПРОЕКТИРОВАНИЕ
ПРИСПОСОБЛЕНИЙ
В МАШИНОСТРОЕНИИ
ДОПУЩЕНО
УМО в области автоматизированного машиностроения (УМО АМ)
в качестве учебника для студентов машиностроительных вузов
САНКТПЕТЕРБУРГ
МОСКВА
КРАСНОДАР
2015
Powered by TCPDF (www.tcpdf.org)
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ББК 34.55я73
З 91
З 91
Зубарев Ю. М.
Расчет и проектирование приспособлений в машиностроении: Учеб
ник. — СПб.: Издательство «Лань», 2015. — 320 с.: ил. — (Учебники для
вузов. Специальная литература).
ISBN 9785811418039
В книге рассмотрены теоретические основы расчета и проектирования приспособле
ний, приведена их классификация, примеры расчета точности, основные типы зажимных
устройств и расчеты усилий закрепления. Даны основные понятия о метрологическом обес
печении технологического процесса, применяемых контрольноизмерительных приспо
соблениях, расчет их точности и разработка КИП.
Учебник предназначен для студентов технических вузов, обучающихся по направле
ниям подготовки инженеров для машиностроения. Он может быть полезен слушателям
повышения квалификации и переподготовки специалистов, инженерамтехнологам и кон
структорам по проектированию оснастки машиностроительных предприятий, проектных
институтов и НИИ.
ББК 34.55я73
Рецензенты:
А. Г. ТАШЕВСКИЙ — доктор технических наук, профессор кафедры «Автоматизация тех
нологических процессов и производств» СПбГПУ, заслуженный работник высшей шко
лы РФ;
Н. Н. РЕВИН — кандидат технических наук, профессор, генеральный директор ООО «На
учноисследовательский технологический институт энергетического машиностроения».
Обложка
Е. А. ВЛАСОВА
© Издательство «Лань», 2015
© Ю. М. Зубарев, 2015
© Издательство «Лань»,
художественное оформление, 2015
Powered by TCPDF (www.tcpdf.org)
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ВВЕДЕНИЕ
Машиностроение является базой всей отечественной промыш
ленности. Уровень развития машиностроения определяет значимость страны
как сильной державы. Именно машиностроение, а не добыча и продажа энер
гоносителей должно развиваться опережающими темпами. Известно, что те
страны, которые не способны производить средства производства для произ
водства, обречены на экономическую зависимость и хозяйственный паралич.
Для ускорения эффективного развития промышленности необходимы раз
работка и внедрение в производство нового оборудования, техники и инно
вационных технологий. Тогда, начиная от фундаментальных и прикладных
научных исследований и заканчивая производством высокотехнологичной и
конкурентной, а значит востребованной продукции, можно ожидать резкого
увеличения ВВП.
В настоящее время многие предприятия машиностроительного комплекса
оснащаются новым современным металлообрабатывающим оборудованием
(к сожалению, в большинстве своем зарубежного производства). Однако любой
самый современный станок останется «железной» массой, которая ничего не
сможет производить, если его не укомплектовать современной технологиче
ской оснасткой.
В понятие технологическая оснастка входят все вспомогательные устрой
ства и инструменты (режущий, мерительный, слесарный и пр.), без которых
оборудование не может работать.
Приспособлениями в машиностроении называют вспомогательные устройст
ва, используемые на операциях механической обработки заготовок, контроля
заготовок и деталей машин, сборки деталей в узлы и механизмы. При этом
приспособления являются, как правило, наиболее сложной, трудоемкой и до
рогой частью технологической оснастки, определяющей производительность,
точность и качество обработки заготовок деталей машин.
Проектирование и производство всей технологической оснастки относится
к технологической подготовке производства.
Технологическая подготовка любого машиностроительного производства в
значительной степени определяет его состояние и развитие. От уровня и значи
Введение
Powered by TCPDF (www.tcpdf.org)
5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
мости технологической подготовки производства зависит его эффективность,
расходование материальных и энергетических затрат, качество выпускаемой
продукции, ее конкурентоспособность.
Непрерывное совершенствование современных машин, механизмов, повы
шение требований к их качеству, точности и надежности, повышение эффек
тивности производства (в том числе и производительности труда) обусловлива
ют рост потребности в различных приспособлениях и необходимость повыше
ния их качества и эффективности.
Правильно и рационально спроектированные приспособления в значитель
ной степени предопределяют точность выполнения заданных размеров, удобст
во и простоту в эксплуатации, производительность и экономичность выполне
ния технологических операций.
Степень оснащенности различных отраслей машиностроения приспособле
ниями неодинакова. На заводах крупносерийного и серийного производства
она в несколько раз выше, чем на предприятиях мелкосерийного производст
ва. Модернизация машиностроения требует значительного увеличения степе
ни оснащения технологических процессов не только в серийном, но и в мелко
серийном и даже единичном производстве.
Повышение коэффициента технологической оснащенности является одним
из весьма эффективных путей совершенствования производства и, в частности,
повышения производительности труда.
Однако рост числа приспособлений и другой технологической оснастки не
избежно вызывает значительное увеличение затрат и нередко возникают труд
ности, связанные с необходимостью рационально расходовать ассигнования на
капитальные вложения. Поэтому весьма актуальной становится задача повы
шения эффективности использования приспособлений. Эта задача решается
различными путями, среди которых основное место занимают усовершенство
вание конструкций приспособлений с точки зрения простоты их изготовления,
сборки и эксплуатации, а также создание и внедрение систем переналаживае
мых, многократно используемых приспособлений.
Частая смена объектов производства, связанная с нарастанием темпов тех
нологического процесса в эпоху научнотехнической революции, требует от
технологической науки и практики создания конструкций и систем приспособ
лений, метода и расчета, проектирования и изготовления, обеспечивающих
неуклонное сокращение сроков подготовки производства. Сегодня в серийном,
мелкосерийном, многономенклатурном производстве необходимо использовать
специализированные, быстропереналаживаемые и обратимые системы приспо
соблений, все более широко применять систему универсальносборных приспо
соблений и т. п.
Ряд принципиально новых требований, предъявляемых к приспособлени
ям, определен расширением парка современных многокоординатных станков с
ЧПУ и станков типа «обрабатывающий центр» (ОЦ), переналадка которых на
обработку новой заготовки сводится к замене программы (что занимает мало
времени) и к замене или переналадке приспособления для базирования и за
крепления заготовки (что также должно занимать соизмеримо мало времени).
Изучение закономерности влияния приспособлений на точность и произво
дительность выполняемых операций, позволяет проектировать приспособле
6
Powered by TCPDF (www.tcpdf.org)
Введение
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ния интенсифицирующие производство и повышающие его точность. Постоян
но проводимая работа по унификации и стандартизации элементов и деталей
приспособлений создает основу для автоматизированного проектирования при
способлений, что входит составной частью в систему автоматизации подготов
ки производства в целом (АСТПП).
Проектирование и изготовление комплекта технологической оснастки при
смене объекта производства составляет иногда 50–60% трудоемкости и 70%
длительности технологической подготовки производства новых машин. Затра
ты на технологическую оснастку достигают 10–15% себестоимости изделий.
Эти цифры характеризуют объем работ по изготовлению всей технологической
оснастки (в том числе и различных приспособлений) и свидетельствуют о том
значении, которое приобретает повышение эффективности ее применения.
Из всех разновидностей технологической оснастки наибольшее распростра
нение и наибольший удельный вес в затратах на проектирование и изготовле
ние имеют приспособления для механической обработки заготовок и контроль
ноизмерительные приспособления.
В настоящее время на большинстве отечественных машиностроительных
предприятий весь комплекс работ по проектированию и изготовлению приспо
соблений выполняется самими предприятиями в инструментальных цехах,
которые относятся к вспомогательному производству с соответствующим осна
щением универсальным оборудованием и низким уровнем специализации. Это
приводит к большим нерациональным расходам, а именно: распыленность
средств, рабочей силы, оборудования и т. п. Низкий уровень специализации
инструментальных цехов препятствует созданию соответствующей технической
базы и прогрессивной формы организации работ. Для такого производства ха
рактерны единичный или мелкосерийный типы производства со значительны
ми затратами ручного труда, вследствие чего производимая продукция значи
тельно дороже и цикл ее изготовления значительно длиннее, чем на специали
зированных предприятиях.
Необходимо создавать небольшие специализированные предприятия по из
готовлению различной технологической оснастки (приспособлений, инструмен
та и пр.). Эти предприятия могут создаваться либо как отраслевые, либо регио
нальные или межрегиональные. Опыт промышленно развитых стран пока
зывает, что это единственно правильный путь для интенсивного развития
машиностроительного комплекса России.
Неоценимый вклад в развитие науки о технологической оснастке внесли оте
чественные ученые: А. П. Соколовский, В. М. Кован, А. И. Каширин, А. А. Ма
талин, В. С. Корсаков, Б. С. Балакшин, М. Е. Егоров, С. П. Митрофанов и мно
гие другие.
Важную роль в развитии любого машиностроительного производства игра
ет подготовка и переподготовка высококвалифицированных инженерных кад
ров, освоение ими современных методов проектирования и совершенствования
машин, агрегатов, приборов и др., технологических процессов их изготовле
ния, готовность к системному анализу быстрого, а иногда и непредсказуемо
изменяющейся производственной и рыночной ситуации, к поиску нетрадици
онных решений, быстрейшему внедрению высокоэффективных, ресурсо и энер
госберегающих технологий и т. п.
Введение
Powered by TCPDF (www.tcpdf.org)
7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
За последнее время в связи с изменившимися условиями, развитием и до
стижениями технологической науки и практики, появлением новых способов
обработки (CALSтехнологии), внедрением передовых наукоемких технологий
(HiTech), автоматизацией проектирования технологических процессов и осна
стки на базе программ CAD/CAM/CAE возникла необходимость издания учеб
ника по расчету и проектированию приспособлений, отражающего указанные
изменения.
Учебник предназначен для студентов технических вузов, обучающихся по
направлениям: «Технология, оборудование и автоматизация машиностроитель
ных производств», «Машиностроение», «Технологическое оборудование маши
ностроительных производств», «Конструкторскотехнологическая подготовка
машиностроительных производств» и др.
Книга может быть полезна для инженернотехнических работников про
мышленных предприятий, КБ и НИИ, занимающихся вопросами расчета и
проектирования приспособлений и автоматизацией производственных процес
сов в машиностроении.
8
Powered by TCPDF (www.tcpdf.org)
Введение
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
РАСЧЕТА И ПРОЕКТИРОВАНИЯ
ПРИСПОСОБЛЕНИЙ
1.1. НАЗНАЧЕНИЕ ПРИСПОСОБЛЕНИЙ
И ИХ КЛАССИФИКАЦИЯ
Приспособлениями в машиностроении называются дополни
тельные устройства к металлообрабатывающему оборудованию, применяемые
при изготовлении деталей машин.
Среди задач, решение которых достигается применением приспособлений,
можно выделить три основных.
1. Установка заготовок на станках без выверки.
Применение приспособлений для установки заготовок ликвидирует доро
гостоящую и трудоемкую операцию разметки, устраняет выверку обрабаты
ваемой заготовки на станке, обеспечивает возможность автоматического полу
чения точности размеров, следовательно, повышает точность обработки за счет
устранения погрешностей, связанных с разметкой и выверкой.
2. Повышение производительности труда.
Высокая производительность труда в равной мере зависит как от высоко
производительного оборудования, так и от высокопроизводительного приспо
собления. Повысить производительность труда — это значит сократить норму
штучного времени на операцию. Норма штучнокалькуляционного времени
определяется по формуле
Tшт.к 1 Tо 2 Tв 2 Tтех.об 2 Tорг.об 2 Tпер 2
Tп.з
.
n
(1.1)
Основное время (Tо) можно уменьшить за счет:
а) увеличения числа одновременно работающих инструментов;
б) одновременной обработки нескольких заготовок (для этого проектиру
ются многоместные приспособления или приспособления для установок заго
товок пакетами);
в) повышения режимов резания (проектирование приспособлений, повы
шающих жесткость технологической системы, позволяет повысить режимы
резания и применять многоинструментальную обработку).
Вспомогательное время (Tв) можно сократить, уменьшив время на установ
ку и закрепление заготовок или совместив вспомогательное время с основным.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
При использовании приспособлений рабочий может не проверять положе
ние заготовки при установке.
Для сокращения времени закрепления заготовки проектируются быстро
действующие ручные, механизированные, автоматизированные и многократ
ные зажимные устройства, поворотные приспособления, автоматические за
грузочные устройства, выталкиватели и др.
Оперативное время (Tоп = Tо + Tв) можно уменьшить, применив приспособ
ления, повышающие степень концентрации операций механической обработ
ки. Проектируют поворотные многопозиционные, многоместные или непре
рывно действующие приспособления, когда установка и снятие, открепление и
закрепление заготовок будут выполнять во время работы станка; таким обра
зом, время, затрачиваемое на эти приемы, совмещается с основным временем
обработки заготовки.
Приспособления расширяют возможность интенсификации технологиче
ских процессов при использовании параллельных и параллельнопоследова
тельных схем обработки поверхностей.
Время технического обслуживания рабочего места (Tтех.об) сокращают, ис
пользуя быстросменные патроны, многорезцовые державки, в которых налад
ка осуществляется вне станка на специальных приспособлениях, шаблоны для
установки инструментов на размер и т. п.
Время организационного обслуживания (Tорг.об) можно уменьшить при соз
дании в приспособлении окон и лотков для отвода стружки, устройств для авто
матической очистки от стружки и ее транспортирования и др.
Время регламентированных перерывов (Tпер) сокращается за счет примене
ния приспособлений, облегчающих труд рабочих.
Подготовительнозаключительное время (Tп.з) уменьшается путем тех же
мероприятий, что Tорг.об, но кроме этого еще за счет создания приспособлений,
обеспечивающих точную и быструю установку их на станке без выверки и до
пускающих быструю переналадку приспособлений на обработку разных заго
товок. В формуле (1.1) n количество деталей в партии.
Задачей технолога по обеспечению повышения производительности труда
является анализ нормы времени для уменьшения ее составляющих.
3. Расширение технологических возможностей оборудования.
Заводы единичного и мелкосерийного производства оснащены в основном
универсальными металлорежущими станками. Каждый станок предназначен
для выполнения какойто определенной работы с заданной точностью. Для та
ких станков применяют специальные приспособления, расширяющие техно
логические возможности оборудования. Например, с помощью специальных
приспособлений обработку шлифованием, протягиванием и фрезерованием
можно производить на токарном станке, растачивание и долбление — на фре
зерном станке, обработку точных отверстий — на сверлильном станке и т. д.
Приспособления, расширяющие технологические возможности станков,
позволяют осуществить: крепление инструментов, редко используемых при
работе на станке; дополнительные взаимные перемещения инструмента и об
рабатываемой заготовки; крепление инструментов и обрабатываемых загото
вок на не предназначенных для этой цели поверхностях станка; точное направ
ление инструмента.
10
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
КЛАССИФИКАЦИЯ ПРИСПОСОБЛЕНИЙ
(ПО В. С. КОРСАКОВУ)
Все приспособления могут быть разделены по трем признакам:
а) целевое назначение;
б) степень специализации;
в) степень механизации и автоматизации.
По целевому назначению приспособления можно разделить на пять основ!
ных групп:
1. Станочные приспособления, используемые для установки и закрепления
обрабатываемых заготовок соответственно условиям выполнения технологиче!
ского процесса. Они выполняют роль связующего звена между заготовкой и
станком. Эти приспособления подразделяются на сверлильные, фрезерные, ра!
сточные, токарные и др. К группе станочных приспособлений относятся также
приспособления специального назначения (для гибки, рихтовки и пр.).
2. Приспособления для закрепления рабочего инструмента. Они выполня!
ют роль связующего звена между инструментом и станком.
Данная группа приспособлений называется также вспомогательным инст!
рументом, характеризуется большим количеством нормализованных и типо!
вых устройств вследствие широкой стандартизации и нормализации инстру!
ментов. При помощи приспособлений первой и второй групп осуществляется
наладка технологической системы.
3. Сборочные приспособления, используемые для выполнения соединений
сопрягаемых деталей в узлы и изделия.
4. Контрольные приспособления, применяемые для проверки заготовок при
промежуточном и окончательном контроле деталей в процессе обработки, а
также для проверки собранных узлов машин.
5. Приспособления для захвата, перемещения и перевертывания обрабаты!
ваемых заготовок и узлов. Эти приспособления применяются для тяжелых объ!
ектов, перемещение которых вручную невозможно или затруднительно. В авто!
матизированном производстве данная группа приспособлений применяется для
всех видов заготовок.
По степени специализации приспособления делятся на три группы:
1. Универсальные приспособления, применяемые в индивидуальном и мел!
косерийном производстве. Используются для закрепления и обработки загото!
вок широкой номенклатуры и различных размеров.
2. Переналаживаемые (обратимые) приспособления, т. е. приспособления
многократного применения. Применяют в мелко! и среднесерийном производ!
стве. К ним относят:
1) универсально!сборные (УСП) и сборно!разборные (СРП) приспособления,
собираемые из набора нормализованных деталей и узлов, допускающих много!
кратную перекомпоновку собираемых конструкций;
2) универсально!наладочные приспособления (УНП) со сменными наладка!
ми, позволяющие обрабатывать заготовки различных наименований;
3) групповые переналаживаемые приспособления со сменными наладками,
дающие возможность обработки определенной группы деталей.
3. Специальные приспособления, предназначенные для выполнения опре!
деленных технологических операций и представляющие собой переналажи!
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
11
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ваемые приспособления одноцелевого назначения. Применяются в основном в
крупносерийном производстве.
По степени механизации и автоматизации приспособления подразделяют
ся на четыре группы:
1) с ручным приводом;
2) с механизированным приводом;
3) полуавтоматические;
4) автоматические.
Основные требования к приспособлениям:
а) обеспечение заданной точности обработки;
б) простота конструкции и наименьшая стоимость изготовления;
в) рациональность конструкции и обеспечение техники безопасности;
г) удобство и простота установки на станок;
д) удобство работы;
е) удобство ремонта и доступность замены изношенных деталей.
1.2. ПРИНЦИПЫ УСТАНОВКИ ЗАГОТОВОК
В ПРИСПОСОБЛЕНИЯХ
Требуемая точность обработки обеспечивается приданием за
готовке вполне определенного положения относительно режущего инструмента.
В зависимости от условий обработки осуществляют полную или частичную
ориентацию заготовки в пространстве относительно режущего инструмента.
В случае полной ориентации заготовке задается определенное положение в при
способлении, при частичной ориентации по условиям обработки не требуется
точной установки в определенных направлениях или допускается произволь
ное положение (поворот) заготовки относительно какойлибо оси (установка
кольца в кулачок патрона при токарной обработке).
В общем случае установка заготовок в приспособлениях решает две основ
ные задачи:
1) придание заготовке требуемого положения относительно выбранной си
стемы координат, т. е. базирование;
2) правильность ориентировки относительно режущего инструмента и
станка.
Базирование заготовки производится с помощью баз.
Базами называются поверхности, линии или точки заготовки, используе
мые для ее ориентации (базирования) в приспособлении или для ориентировки
деталей относительно других деталей и сборочных элементов. Существует ГОСТ
2149576 «Базирование и базы в машиностроении».
Чтобы заготовку лишить 6ти степеней свободы, надо на нее наложить же
сткие геометрические связи, соединяющие ее с координационными плоскостя
ми выбранной системы. Эти связи накладываются путем контакта баз заготов
ки с установочными элементами приспособления.
Такие контакты происходят по локальным поверхностям. В пределе их мож
но считать точками. В зависимости от числа опорных точек, располагаемых на
базе, и следовательно, от числа степеней свободы, отнимаемых при этом у заго
товки, применительно к призматическим заготовкам различают (рис. 1.1):
12
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
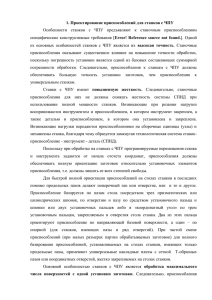
Рис. 1.1
Схема базирования призматических заготовок:
а — положение в системе координат; б — положение в приспособлении; W — сила прижима.
1) установочную базу A, находящуюся в контакте с тремя опорными точками;
2) направляющую базу B, находящуюся в контакте с двумя опорными точ
ками;
3) упорную базу C, имеющую контакт с одной опорной точкой.
Для повышения точности и надежности ориентации заготовок в качестве
установочной базы принимают поверхность с наибольшими размерами, позво
ляющую расположить три опорные точки, лежащие не на одной прямой и на
значительном расстоянии друг от друга. За направляющую базу с той же целью
принимают самую длинную поверхность. В качестве упорной базы может быть
использована поверхность любых, даже самых малых, размеров при условии
достаточно хорошего ее состояния и постоянства формы (отсутствие литников,
заусенцев, литейных швов, линий разъема и т. п.).
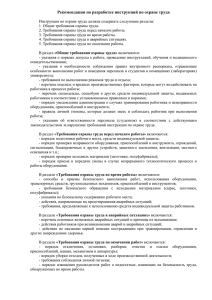
Для ориентации длинного цилиндрического тела (l ³ 2d) в пространстве не
обходимо соединить его цилиндрическую поверхность с двумя двусторонними
связями с плоскостями xOy и yOz (рис. 1.2), лишая этим тело четырех степеней
Рис. 1.2
Схема базирования цилиндрических заготовок:
а — положение в системе координат; б — положение в приспособлении.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
13
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
свободы. Для устранения возможности перемещения тела вдоль оси Oy следует
соединить его торец с плоскостью xOz. В целях лишения тела шестой степени
свободы должна быть предусмотрена шестая двусторонняя связь в виде опор"
ной точки, располагаемой на поверхности шпоночной канавки.
В реальных условиях базирования четыре двусторонние связи заменяются
четырьмя опорными точками, находящимися в контакте с цилиндрической
поверхностью A, называемой двойной направляющей базой. Торцевая поверх"
ность C, на которой располагается пятая опорная точка, называется опорной
базой, а шпоночная канавка B, которая является шестой опорной точкой, заме"
няющей шестую двустороннюю связь, называется второй опорной базой.
Несколько иначе следует рассматривать базы при ориентации цилиндриче"
ских заготовок деталей типа тонких дисков, длина которых значительно мень"
ше диаметра. Очевидно, что в этом случае цилиндрическая поверхность уже не
может выполнить функции двойной направляющей базы и находиться в кон"
такте с четырьмя опорными точками. С другой стороны, относительно боль"
шие размеры торцевой поверхности делают возможным размещение на ней
трех опорных точек, что вносит определенность в ориентацию заготовки в про"
странстве.
В соответствии с этим при ориентации в пространстве короткого цилиндри"
ческого тела (типа тонкого диска) необходимо соединить его торцевую поверх"
ность C тремя двусторонними связями (координатами) y с плоскостью xOz
(рис. 1.3). При этом тело лишается трех степеней свободы: возможности пере"
мещения вдоль оси Oy и вращательных движений вокруг осей Ox и Oz. Для
лишения тела возможного перемещения вдоль осей Ox и Oz следует соединить
его цилиндрическую поверхность A двусторонними связями, координатами x
и z с плоскостями yOz и xOy; шестая двусторонняя связь, лишая тело возмож"
ности поворотов вокруг собственной оси,
параллельной оси Oy, создается поме"
щением опорной точки на поверхности
шпоночной канавки B.
При соответствующей замене дву"
сторонних связей опорными точками
торцевая поверхность C диска, контак"
тирующая с тремя опорными точками,
называется установочной базой, цилин"
дрическая поверхность A, контактирую"
щая с двумя опорными точками, называ"
ется двойной опорной (или центрирую"
щей) базой, а поверхность шпоночной
канавки B — упорной базой.
При ориентации дисков, так же как
и при ориентации длинных цилиндри"
ческих заготовок, часто бывает удобно
использовать призмы.
Специфические особенности имеет
Рис. 1.3
ориентация
в пространстве конических
Схема базирования деталей типа тонких
заготовок
и
деталей.
При установке за"
дисков
14
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
готовки или детали по длинной конической поверхности с относительно не
большой конусностью (отверстия в шпинделях станков, конусные хвостовики
режущих инструментов, конические оправки трения) коническая поверхность
лишает деталь пяти степеней свободы (перемещения вдоль всех трех осей коор
динат и поворотов вокруг двух осей системы координат), оставляя ей только
одну степень свободы — возможность поворотов вокруг собственной оси, кото
рая может рассматриваться как третья ось системы координат. Таким образом,
в этом случае коническая поверхность совмещает в себе функции двойной на
правляющей и упорной поверхности цилиндрической детали и контактирует с
пятью опорными точками. Очевидно, что для полной ориентации заготовки
или детали в пространстве необходимо лишить ее еще одной степени свободы,
разместив на одной из ее поверхностей шестую опорную точку (шпоночный
паз, лыска).
По аналогии с ранее рассмотренными случаями ориентации заготовок или
деталей в пространстве поверхность длинного конуса, которая находится в кон
такте с пятью опорными точками, может быть названа упорнонаправляющей
базой, а поверхность, контактирующая с одной опорной точкой, — упорной
базой. Полная ориентация конусной заготовки или детали в приспособлении
или сборочном элементе, лишающая ее всех шести степеней свободы, достига
ется при использовании комплекта двух баз: упорнонаправляющей и упорной
(шпоночного паза или лыски).
При базировании заготовки по короткой конической поверхности с относи
тельно большим углом конуса, как это имеет место при установке заготовки в
центрах, условия базирования значительно меняются.
Коническая поверхность короткого центрового отверстия не в состоянии
выполнять функции направленияоси заготовки, осуществляемые двойной на
правляющей базой цилиндрической заготовки или упорнонаправляющей по
верхностью детали с длинным конусом. Ее возможности ограничиваются вы
полнением функции центрирования (аналогично цилиндрической поверхности
диска, являющейся двойной упорной или центрирующей базой) и в некоторых
случаях дополняются выполнением функции упорной базы. Следует заметить,
что, несмотря на внешнее подобие задачи в ориентации заготовки, роли, вы
полняемые левым и правым центровыми отверстиями, неодинаковы. Левое цен
тровое отверстие, соприкасающееся с неподвижным в осевом направлении цен
тром передней бабки, выполняет функции центрирования и определяет положе
ние заготовки в осевом направлении. Таким образом, оно лишает заготовку трех
степеней свободы (перемещения вдоль трех осей координат) и несет на себе три
опорные точки. По выполняемой функции коническая поверхность переднего
(левого) центрового отверстия называется упорноцентрирующей базой.
Функция заднего центрового отверстия, соприкасающегося с подвижным в
осевом направлении центром задней бабки, ограничена осуществлением цен
трирования. Эта поверхность находится в контакте с двумя опорными точками
и лишает заготовку двух степеней свободы (поворотов вокруг осей координат).
В соответствии с этим коническая поверхность заднего центрового отверстия
называется центрирующей базой.
Следовательно, установка заготовки в центрах лишает ее пяти степеней
свободы, сохраняя возможность вращения заготовки вокруг собственной оси.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
15
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Очевидно, что в случае необходимости точной ориентации положения заготов
ки с точки зрения ее поворота относительно своей оси (что бывает необходимо,
например, при обработке несимметричных заготовок на фрезерных станках
при их установке в центрах, при нарезании многозаходных резьб и т. п.) следу
ет использовать одну из дополнительных поверхностей заготовок в качестве
упорной базы, вводя ее в контакт с шестой опорной точкой и лишая заготовку
шестой степени свободы.
Таким образом, полная ориентация заготовки в пространстве при установ
ке в центрах достигается при использовании комплекта из трех баз:
1) упорноцентрирующей базы (коническая поверхность переднего центро
вого отверстия, находящаяся в контакте с тремя опорными точками);
2) центрирующей базы (коническая поверхность заднего центрового отвер
стия, контактирующая с двумя опорными точками);
3) упорной базы (дополнительная поверхность заготовки выполняет роль
шпоночной канавки или упора и лишает заготовку возможности поворота во
круг своей оси, контактирует с одной опорной точкой).
1.2.1. КОЛИЧЕСТВО БАЗ, НЕОБХОДИМОЕ ДЛЯ БАЗИРОВАНИЯ
ОБОЗНАЧЕНИЕ БАЗ В ТЕХНОЛОГИЧЕСКОЙ ДОКУМЕНТАЦИИ
Во всех рассмотренных выше примерах полной ориентации заготовки или
детали в приспособлении или в сборочном элементе машины использовался
комплект из нескольких (в большинстве случаев трех) баз, обеспечивающий
лишение тела всех шести степеней свободы путем контакта баз с шестью опор
ными точками.
Необходимо отметить, что полная ориентация детали, предусматривающая
лишение ее всех степеней свободы, бывает необходима только в неподвижных
соединениях деталей сборочных единиц машин. Во всех случаях подвижных
соединений детали или сборочные единицы должны сохранять определенные
степени свободы и создания в соединениях шести опорных точек не требуется.
Например, шпиндели станков должны быть лишены пяти степеней свободы
при сохранении возможности вращения вокруг своей оси; салазки суппорта
станка также должны сохранять одну степень свободы, позволяющую их пере
мещение по направляющим, а шарик шарикоподшипника должен сохранить
четыре степени свободы — возможность вращения вокруг любой из трех осей
координат и возможность перемещения вдоль одной из осей, направленной по
касательной к окружности беговой дорожки.
При обработке заготовок на станках и их установке в приспособлениях в
ряде случаев также нет необходимости в полной ориентации заготовок с ис
пользованием всего комплекта из трех баз, контактирующих с шестью опорны
ми точками приспособления или станка. Так, например, при обработке плоско
сти призматической заготовки, выдерживая размер a (рис. 1.4а), ориентация
заготовки на станке в направлении горизонтальных осей координат для полу
чения требуемого размера а не имеет значения, вследствие чего направляющая
и упорная поверхности заготовки теряют значение баз. Очевидно, что в данном
случае требуемая ориентация заготовки осуществляется только одной устано
16
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 1.4
Ориентация призматических (а, б, в) и цилиндрических (г, д, е) заготовок
при их обработке:
цифры — число степеней свободы, отнимаемое у заготовки при базировании по данным схемам.
вочной базой A, в то время как значение боковых поверхностей заготовки сво
дится к роли упоров, необходимых не для ориентировки, а только для закреп
ления заготовки.
Естественно, что для получения у заготовки двух размеров (например, a и b
на рисунке 1.4б) возникает необходимость ее ориентации не только с помощью
установочной базы — поверхности A, но также с помощью направляющей
базы — поверхности B; комплект этих баз обеспечивает ориентацию заготов
ки, требуемую для получения заданных размеров. В случае же, изображенном
на рисунке 1.4в, когда требуется обеспечить выполнение трех размеров a, b и c
для ориентации заготовки, необходимо использовать комплект из трех баз,
т. е. поверхностей A, B, C.
При обработке цилиндрических заготовок для их базирования во многих
случаях тоже нет необходимости в использовании комплекта всех трех баз.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
17
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Например, при сквозном сверлении и растачивании заготовки, закрепленной в
патроне, используется только одна двойная направляющая база A, находящая
ся в контакте с четырьмя опорными точками (рис. 1.4г). При растачивании же
во втулке ступенчатого отверстия, когда выдерживается линейный размер а,
для обеспечения его точности при базировании необходимо использовать две
базы: двойную направляющую A и упорную C (рис. 1.4д).
При установке валиков в центрах на токарных или шлифовальных станках
они базируются по коротким крутым конусам центровых отверстий и, как ука
зывалось ранее, с помощью пяти опорных точек (рис. 1.4е) лишаются пяти
степеней свободы. При этом у валиков сохраняется шестая степень свободы —
возможность вращения вокруг своей оси, необходимая для осуществления их
обработки. Необходимо подчеркнуть, что обычно используемый в подобных
случаях хомутик отнюдь не лишает заготовку шестой степени свободы, так как
он не участвует в базировании заготовки и не ориентирует ее положения созда
нием определенных углов ее поворота вокруг оси. Такая ориентация при обра
ботке круглых симметричных заготовок и не требуется. Роль хомутика ограни
чивается только передачей вращения обрабатываемой заготовке; аналогична
роль рифлений, наносимых иногда на поверхность переднего центра, при об
точке валиков без хомутиков. Очевидно, что рифления центров, хомутики и
тому подобные средства передачи вращения никакого отношения к базирова
нию (ориентации заготовки в приспособлении) не имеют.
Таким образом, в зависимости от технологической задачи, решаемой при
обработке заготовки при ее базировании в приспособлении или на станке, мо
жет быть использована одна, две или три базы, несущие на себе в общей слож
ности три, четыре, пять или шесть опорных точек. При оформлении технологи
ческой документации на операционных эскизах обрабатываемых заготовок все
опорные базы отмечаются условными знаками с указанием числа опорных то
чек, которые должна иметь данная поверхность. При этом, в соответствии с
ГОСТ 3.110781, на контурных линиях поверхностей, избранных для базирова
ния заготовок, проставляются условные обозначения опор в виде знака рис.,
который может наноситься в сочетании с обозначением зажима рис..
Для упрощения эскиза раздельное изображение нескольких одноименных
опор указанным выше знаком для «вида спереди» заменяется одним знаком;
при этом количество одноименных опор, используемых для ориентировки соот
ветствующей поверхности, проставляют в правой части знака: рис. бн 3рис. бн 3;
условные обозначения опор для «вида сверху» знаком рис. наносят на эскизе
отдельно друг от друга в соответствии с принятым их размещением. При анали
зе теоретических схем базирования удобно обозначать идеальные опорные точ
ки теми же значками и по тем же правилам, которые установлены указанным
выше ГОСТ для обозначения опор.
В случае необходимости, когда зажим заготовки совмещается с опорой (на
пример, при закреплении заготовки в кулачковом патроне или на разжимной
оправке) или когда направление зажимного усилия принципиально важно для
качественного выполнения проектируемой операции (например, осевой зажим
тонкостенной втулки при ее расточке), на операционных эскизах показывают
ся не только опорные точки на базах, но и направления усилий зажимов.
18
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
УСТАНОВКА ЗАГОТОВОК В ПРИСПОСОБЛЕНИЯХ
Процесс установки заготовок в приспособлениях или на станках состоит из
их базирования (ориентации) и закрепления. Как указывалось выше, для точ2
ной обработки заготовки необходимо осуществить ее правильное расположе2
ние по отношении к устройствам станка, определяющим траектории движения
подачи обрабатывающего инструмента, обеспечить постоянство контакта баз с
опорными точками и полную неподвижность заготовки относительно приспо2
собления в процессе обработки. Первая задача решается технологом при бази2
ровании заготовки путем определения необходимого для решений данной тех2
нологической задачи числа и расположения идеальных связей и опорных то2
чек и установления соответствующих базовых поверхностей заготовки.
При этом на контурных линиях базовых поверхностей заготовки, изобра2
женной на операционном эскизе, технолог наносит установленное им расположе2
ние опорных точек, требующихся для выполнения данной операции, создавая
тем самым «Теоретическую схему базирования». При проектировании приспо2
собления конструктор по оснастке обязан предусмотреть создание и располо2
жение опор для базирования заготовки в точном соответствии со схемой бази2
рования, установленной технологом.
Для упрощения и сокращения объема работы технологов рекомендуется на
операционных эскизах, вместо теоретической схемы базирования с изображе2
нием отдельных опорных точек, непосредственно наносить условные обозначе2
ния опор и зажимов по ГОСТ 3.1107281.
Вторая задача, закрепление заготовки (т. е. обеспечение контакта базовых
поверхностей заготовки с опорными точками приспособления и полной непод2
вижности заготовки относительно приспособления в процессе ее обработки),
решается при конструировании приспособления созданием необходимых за2
жимных устройств. В отличие от базирования заготовки, когда на нее накла2
дывается различное число связей и она лишается трех, четырех, пяти или шести
степеней свободы, во всех случаях закрепления заготовка должна быть лишена
всех шести степеней свободы. Закрепление (зажим) заготовки основано на ис2
пользовании фрикционных связей, реализуемых в зажимных устройствах с
разнообразными источниками силы (механическими, гидравлическими, пнев2
матическими, магнитными, вакуумными и т. п.).
В таблице 1.1 приведены условные обозначения опор и зажимов, соответст2
вующие ГОСТ 3.1107281, на операционных технологических эскизах схем уста2
новок заготовок в приспособлениях при использовании опорных технологиче2
ских баз.
Следует также отметить, что чем меньше число баз и опорных точек ис2
пользуется при базировании заготовок, тем проще, производительнее и дешев2
ле получается конструкция приспособлений. Поэтому при базировании обра2
батываемых заготовок необходимо стремиться к использованию наименьшего
числа баз с наименьшим числом опорных точек, при котором может быть обес2
печено выполнение заданных чертежом размеров и формы изделия.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
19
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 8987
1234567894 4 6
!2424 38689
12345678239
8694499
4599 9
"#92 4$%9
&2349
%' 5 87(9
2'8868)9
254 4#79
"#9593 689
75 639 7375 6
6
6
6
123456875 6
6
6
6
6
4 625625 76
6
6
12345648 485 6
53575 55 6
239 39 5 639 7375 6
6
6
6
123463
43 57786
1234624 !5 8 336 256
78239
786
6
6
6
6
1234624 !5 8 336 256
239
786
6
6
"6
16
6
#78678239
6
7$6
6
#786239
6
6
7$6
6
%874659
20
Powered by TCPDF (www.tcpdf.org)
$6
6
6
6
"6 6&116
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
12345646789 39
123456578923
3 476
6
123456 57 6
6
1234569 7 6
123456543
6
6
6
453 6 645267624 526
9 263 26
5 765!973 26
4536#57
3486
239
4959 9
4676 3 58 9
6
5 6
6
67976
6
6
11
6
11
6
6
6
67976
6
"1116
6
"1116
6
$6
6
"1116
6
"1116
6
"1116
6
6
6
4536 6
6
453632 %4727 6
6
4536 75 9727 6
6
453 6% 3743 26
76&9245% 3743 26
6
'5 679735726
'5 63726
)*7%6733
6
6
6
6
6+%23727 ,6
(111116
$6
6
6
)*7%6975 33
+%23727 ,6
(11116
6 3 6
6
6
)*7% 6% 3743 26
76&9245% 3743 26
6
$6
$6
6
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
21
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Примечания к таблице 1.1.
* Подвижная призматическая опора лишает заготовку одной степени свободы (совме
щает центр окружности базируемой поверхности с биссектрисой призмы). Однако при уста
новке длинной заготовки типа шатуна в двух подвижных призмах, перемещающихся на
встречу друг другу (т. е. «самоцентрирующих» шатун по длине), заготовка лишается трех
степеней свободы (обеспечивается «направление» шатуна, ибо устраняется возможность
бокового перемещения каждой из его головок и определяется его положение в направлении
его оси).
** При неподвижном положении центра в осевом направлении, когда он не только цент
рирует заготовку, но и служит для нее упором (обычная функция переднего центра станка),
заготовка лишается трех степеней свободы. Когда центр «плавает» вдоль оси или переме
щается вместе с пинолью для закрепления заготовки (работа заднего центра) — заготовка
лишается двух степеней свободы (центр только центрирует заготовку).
*** При закреплении в патронах и на разжимных оправках по длинной цилиндрической
поверхности (двойная направляющая база), независимо от числа кулачков и вида зажимно
го устройства, заготовка лишается четырех степеней свободы.
При закреплении по короткой цилиндрической поверхности патроны и оправки только
центрируют заготовку в плоскости приложения кулачков и лишают ее двух степеней свобо
ды. Направление оси заготовки при этом не определяется.
Если при закреплении в патронах и оправках предусматривается упор заготовки по
торцу, определяющий ее положение в осевом направлении (упорная база), заготовка лиша
ется еще одной, т. е. пятой степени свободы, однако в этом случае на операционном эскизе,
кроме обозначения патрона или оправки, следует дополнительно показать опору по торцу
заготовки.
**** При базировании заготовки по длинному цилиндрическому отверстию на цилинд
рической оправке с упором по торцу заготовка лишается пяти степеней свободы (четыре по
двойной направляющей базе — цилиндрической поверхности отверстия, и одна по упорной
базе — торцу базируемой заготовки).
При базировании коротких дисков цилиндрическая оправка также лишает заготовку
пяти степеней свободы, однако по цилиндрической поверхности в этом случае осуществля
ется только центрирование заготовки с лишением ее двух степеней свободы. Направление
оси диска обеспечивается его базированием по большой торцевой плоскости (установочная
база, лишающая заготовку трех степеней свободы).
***** При установке заготовки цилиндрическим отверстием на конической беззазорной
оправке трения заготовка лишается пяти степеней свободы (длинный конус — упорнона
правляющая база). Однако следует учитывать, что положение заготовки в осевом направле
нии в этом случае изменяется в широких пределах, потому что погрешность базирования в
этом направлении очень сильно зависит от колебаний диаметра базового отверстия в преде
лах его допуска, так как конусность оправки трения весьма мала.
1.3. ВЫБОР БАЗ ПРИ ПРОЕКТИРОВАНИИ
ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
1.3.1. ВИДЫ БАЗ
При решении задач базирования заготовок, деталей и сбороч
ных единиц в машиностроении используют различные виды баз, имеющие оп
ределенные особенности.
КОНСТРУКТОРСКАЯ БАЗА
Конструкторская база служит для определения положения детали или сбо
рочной единицы в изделии. В практике конструкторской работы конструктор
ской базой называется поверхность, линия или точка детали, по отношению к
которой определяются на чертеже расчетные положения других деталей или
22
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
сборочных единиц изделия, или других поверхностей и геометрических эле
ментов данной детали.
Конструкторские базы выявляются при расчетах размерных цепей меха
низмов. В качестве конструкторских баз часто выступают не материальные, а
геометрические элементы деталей, т. е. конструкторская база может быть не
только материальной (поверхность детали), но и условной (осевые линии, бис
сектрисы углов, оси симметрии и т. п.). Использование условных конструктор
ских баз (расстояния между центрами отверстий, расположение центров отвер
стий относительно элементов наружного контура, начальная окружность зуб
чатого венца и др.) является удобным для оформления чертежей и размерных
расчетов конструкций и часто встречается в проектных разработках.
В отличие от баз, применяемых при конструировании, при сборке машин в
качестве баз служат только материальные поверхности деталей, а также разме
точные линии и точки, нанесенные на эти поверхности. Даже если в целях
повышения точности сборки и уменьшения влияния погрешности материаль
ных баз на точность соединений при сборке пытаются использовать условные
конструкторские базы (например, осевые линии), то они всегда материализу
ются нитями отвесов, оптическими лучами коллиматоров и тому подобными
устройствами. Однако и в этих случаях в ориентировке собираемых деталей и
сборочных единиц участвуют материальные базы — плоскости, торцы, цилинд
рические поверхности и др.
ИЗМЕРИТЕЛЬНАЯ БАЗА
Измерительная база служит для определения относительного положения
заготовки или изделия и средств измерения. Измерения обрабатываемых заго
товок, деталей и собираемых сборочных единиц и изделий выполняют с разны
ми целями и в различных условиях, и соответственно этому целесообразно дать
следующее определение.
Измерительной базой называется поверхность, линия или точка, от кото
рой производится отсчет выполняемых размеров при обработке или измере
нии заготовок или при проверке взаимного расположения поверхностей дета
лей или элементов изделия (параллельность, перпендикулярность, соосность
и т. д.).
При использовании в качестве измерительных баз материальных поверх
ностей изделий проверку производят обычными прямыми методами измере
ния; при использовании геометрических элементов (биссектрисы углов, осе
вые линии, плоскости симметрии и другие условные измерительные базы) из
мерительные базы материализуются с помощью вспомогательных деталей
(штырей, пальцев, натянутых струн, отвесов), оптических установок (колли
маторов) и других устройств.
ТЕХНОЛОГИЧЕСКАЯ БАЗА
Технологическая база служит для определения положения заготовки или
изделия в процессе изготовления. Применительно к механической обработке
заготовок технологической базой называется поверхность заготовки, относитель
но которой ориентируются ее поверхности, обрабатываемые при данном уста
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
23
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
нове. В качестве технологических баз используют также разметочные линии
и точки, нанесенные на материальные поверхности заготовок для выверки по
ложения последних на станках относительно траектории движения режущих
инструментов.
По особенностям применения технологические базы подразделяются на
опорные, настроечные и проверочные.
ОПОРНЫЕ БАЗЫ
Технологические базы, непосредственно соприкасающиеся с соответствую
щими установочными поверхностями приспособления или станка, называют
ся опорными технологическими базами.
При обработке заготовок по принципу автоматического получения разме
ров требуемую точность можно обеспечить сравнительно легко путем настрой
ки станка относительно опорных технологических баз заготовки.
В примере на рисунке 1.4в при работе на настроенном станке, точность раз
мера а определяется правильностью установки высоты стола, обеспечивающей
расстояние фрезы до установочной опорной технологической базы A, равные
величине a; точность размера b — правильность поперечной установки стола,
обеспечивающей расстояние оси фрезы от направляющей опорной технологи
ческой базы B, равное b + dфр/2 (где dфр — диаметр фрезы), и точность размера
C определяется правильностью установки упора, выключающего продольную
подачу стола при достижении осью фрезы расстояния c + dфр/2 от упорной тех
нологической базы C. Смена заготовок, обрабатываемых при неизменной на
стройке станка, не влияет на получаемые размеры, и они остаются одинаковы
ми для всей партии обрабатываемых заготовок (не учитывая случайного рас
сеивания размеров).
Опорные технологические базы, обеспечивающие необходимую точность
обработки партии заготовок на настроенных станках и не требующие сложной
настройки станка, широко применяются в серийном производстве.
НАСТРОЕЧНЫЕ БАЗЫ
При работе на настроенных станках наивысшая точность размеров обраба
тываемой заготовки получается тогда, когда эти размеры проставлены непо
средственно от тех поверхностей заготовки, относительно которых может быть
произведена настройка станка, т. е. могут быть выставлены упоры станка или
режущие инструменты.
Для осуществления настройки станка относительно определенных поверх
ностей заготовки необходимо, чтобы эти поверхности занимали на станке при
смене заготовок неизменное положение относительно упоров станка, опреде
ляющих конечное положение обрабатывающего инструмента. К таким поверх
ностям (занимающим неизменное положение на станке) относятся в первую
очередь опорные поверхности заготовки, что и предопределяет их широкое ис
пользование в крупносерийном производстве в качестве опорных технологиче
ских баз. Такими же поверхностями являются поверхности, образуемые на
заготовке при данном установе и связанные с другими обрабатываемыми по
верхностями непосредственными размерами.
24
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Примером использования в качестве
технологической базы поверхности, обра
батываемой за один установ с другими по
верхностями, может служить обработка
заготовки на револьверном станке (рис. 1.5).
Заготовка опирается поверхностью M на
соответствующий упор зажимного устрой
ства станка, однако эта поверхность, яв
ляясь опорной технологической базой для
обработки торца A заготовки на размер h,
не будет таковой для всех остальных тор
цевых поверхностей заготовки (B, C, D, E),
обрабатываемых на размеры (b, c, d, a). По
ложение поверхностей B, C, D, E опреде
ляется при настройке станка не положени
ем поверхности M, а положением поверхно
сти A, относительно которой производится
установка упоров. В этом случае поверх
ность A, обрабатываемая при том же уста
Рис. 1.5
Технологические базы при обработке
нове, что и остальные поверхности (B, C,
заготовок на револьверном станке
D, E), является для них технологической
базой, называемой настроечной базой.
Настроечной базой называется поверхность заготовки, по отношению к ко
торой ориентируются обрабатываемые поверхности, связанная с этими поверх
ностями непосредственными размерами и образуемая при одном установе с
рассматриваемыми обрабатываемыми поверхностями заготовки. Настроечная
база обычно связана непосредственным размером с опорной базой заготовки.
При построении операции обработки заготовки с использованием настроеч
ной базы опорная поверхность заготовки является технологической базой при
получении линейных размеров только для обработки самой настроечной базы,
с которой она связана непосредственно размером. Технологической базой для
обработки всех остальных поверхностей заготовок и получения линейных раз
меров a, b, c, d в этом случае служит не опорная, а настроечная база заготовки.
В зависимости от конфигурации и предъявляемых к ней требований заго
товка может иметь несколько настроечных баз одного направления размеров,
что в известной степени затрудняет настройку станка, однако создает преиму
щество непосредственной простановки размеров между поверхностями, взаим
ное расположение которых важно для готового изделия.
К методу работы по настроечной базе относятся всевозможные способы точ
ного растачивания нескольких отверстий и другие подобные им операции, при
которых режущий инструмент перемещается от одной обработанной поверхно
сти заготовки к другой на требуемое по чертежу расстояние с помощью специ
альных шаблонов, отсчетных устройств станка или согласно заданной програм
ме. Очевидно, что в подобных случаях можно использовать несколько настро
ечных баз разных направлений. Применение настроечных технологических
баз значительно расширяет возможности простановки размеров на чертежах за
готовок, так как позволяет устанавливать размеры без повышения их точности
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
25
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
не только непосредственно от опорных поверхностей, но и от измерительных
баз, которые можно использовать в качестве настроечных.
Использование настроечных баз способствует упрощению конструкции при
способлений, концентрации операций технологического процесса и сокраще
нию общего числа операций, а также дает возможность производить замеры
заготовок непосредственно на станке. Некоторое усложнение наладки станка,
связанное с использованием настроечной базы, компенсируется в серийном
производстве указанными преимуществами применения этих баз.
Особенно ярко выявляются преимущества настроечных баз при использо
вании автоматов, многорезцовых станков, станков с копировальными устрой
ствами (гидросуппорты и т. д.), станков с числовым программным управлени
ем и обрабатывающих центров, которые требуют создания сложных концент
рированных операций, а также при многопозиционной обработке.
Опорная и настроечная технологические базы получили широкое распро
странение в серийном производстве при настройке станков, работающих по
методу автоматического получения размеров. Как известно, при установке за
готовки в приспособлениях на опорной базе всегда возникает погрешность за
крепления, являющаяся одной из причин рассеивания размеров заготовок,
проставленных от опорных баз, и увеличивающая общую погрешность обра
ботки. При использовании настроечных баз погрешность закрепления загото
вок на точность размеров, проставленных от этих баз, не влияет.
ПРОВЕРОЧНЫЕ БАЗЫ
При обработке заготовок в условиях мелкосерийного и единичного произ
водства довольно широкое применение находит метод обработки заготовки по
проверочным базам. Проверочной базой называется поверхность заготовки или
детали, по отношению к которой производится выверка положения заготовки
на станке, или установка режущего инструмента при обработке заготовки, или
выверка положения деталей, или сборочных единиц при сборке изделия.
Довольно распространенным случаем применения проверочных баз в се
рийном производстве является базирование заготовок по ранее изготовленным
(отлитым или обработанным) отверстиям с помощью установочных штырей.
После закрепления заготовок в приспособлениях установочные штыри вынима
ют из заготовки и производят чистовую обработку отверстий. Подобный метод
обеспечивает равномерность распределения припуска на обработку отверстий,
что особенно важно при обработке на расточных станках, а также правильное
расположение обработанных поверхностей относительно оси базирующего от
верстия. Замена выверки положения заготовки по проверочной базе специаль
ными штырями, центрирующими заготовку по этой базе, значительно сокра
щает затраты вспомогательного времени на установку заготовки, что делает
применение этого метода базирования экономически целесообразным.
ИСКУССТВЕННЫЕ ТЕХНОЛОГИЧЕСКИЕ БАЗЫ
Если конфигурация заготовок не дает возможности выбрать технологиче
скую базу, позволяющую удобно, устойчиво и надежно ориентировать и закре
пить заготовку в приспособлении или на станке, то прибегают к созданию ис
кусственных технологических баз. К категории искусственных технологиче
26
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ских баз относятся также технологические базы, которые в целях повышения
точности базирования обрабатываемой заготовки в приспособлении или на стан
ке обрабатываются с более высокой точностью, чем это требуется для готового
изделия при его эксплуатации.
Наиболее характерным примером искусственных технологических баз мо
гут служить центровые отверстия, не требующиеся для готового вала и необхо
димые исключительно из технологических соображений. Когда сохранение
центровых отверстий по условиям эксплуатации недопустимо, после обработ
ки вала их срезают. Если центровые отверстия используются при эксплуата
ции детали и являются конструктивно необходимыми, то они не могут рас
сматриваться как искусственные технологические базы.
При механической обработке крупногабаритных турбинных лопаток в ка
честве технологических баз часто используют хвостовик лопатки и искусствен
ную базу — приливбобышку, специально созданную для облегчения установ
ки лопатки в приспособлениях. После механической обработки лопаток бо
бышки отрезают. Если отдельные поверхности специального приливабобышки
входят в общее число базирующих поверхностей технологической базы и вме
сте с ними несут на себе часть опорных точек, то бобышку следует отнести к
категории искусственных технологических баз. Однако если все шесть опор
ных точек технологической базы размещаются на других поверхностях лопат
ки, например на ее хвостовике, и опорные точки, располагающиеся на техно
логической бобышке, являются избыточными, то в этом случае бобышка не
может рассматриваться в качестве базы, так как она не базирует (не ориентиру
ет) заготовку относительно станка, а только служит дополнительной опорой
вследствие недостаточной жесткости заготовки.
ДОПОЛНИТЕЛЬНЫЕ ОПОРНЫЕ ПОВЕРХНОСТИ
Как указывалось ранее, для полной ориентировки тела в пространстве не
обходимо и достаточно лишить его шести степеней свободы. Следовательно,
для полного определения положения заготовки в приспособлении теоретически
необходимо создать шесть опорных точек. В этом случае положение заготовки
в приспособлении является статически определенным. Однако при установке
обрабатываемой заготовки, отличающейся малой жесткостью и большими раз
мерами, при установке по шести опорным точкам происходит ее деформация
под действием силы тяжести и усилий резания, исключающая возможность
достижения требуемой точности обработки. В подобных случаях технолог вы
нужден применять дополнительные опорные поверхности, несущие на себе до
полнительные опорные точки (сверх шести, необходимых теоретически). При
этом положение заготовки становится статически неопределенным.
Дополнительные опорные поверхности могут быть естественными, т. е. по
лученными в процессе обработки заготовки в соответствии с требованиями чер
тежа, или искусственными, созданными на заготовке специально для ее уста
новки и закрепления в приспособлении (всевозможные дополнительные цен
тровые отверстия, выточки под люнеты, специальные приливы, бобышки
и т. п.).
Примером использования дополнительной опорной поверхности может слу
жить токарная обработка длинного вала. С точки зрения ориентировки вала
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
27
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
в пространстве его положение полностью определяется зажимом в патроне с
упором торца вала в соответствующие упорные поверхности кулачков (пяти
опорных точек в данном случае достаточно, так как при обточке вала не требу
ется его ориентировка относительно оси вращения). Однако для предотвраще
ния прогиба вала применяется поддержка его центром по дополнительной опор
ной поверхности — центровому отверстию, несущему на себе еще две опорные
точки. Если дополнительная опорная поверхность (центровое отверстие) будет
смещена относительно поверхности конца закрепленного в патроне вала, опре
деляющей положение вала на станке, то вал будет искривляться и после обра
ботки будет иметь погрешность формы.
Приведенный пример показывает, что применение дополнительных опор
ных поверхностей может внести неопределенность в положение заготовки при
обработке и тем самым снизить точность обработки (по расположению обраба
тываемых поверхностей). Вследствие этого рекомендуется использовать в ка
честве дополнительных опор всевозможные подвижные и регулируемые опоры
(механические и автоматические подпоры и т. д.).
В тех случаях, когда это невозможно, необходимо обеспечить высокую точ
ность расположения дополнительной опорной поверхности заготовки по отноше
нию к ее технологическим базам, несущим на себе теоретически необходимые
шесть опорных точек, поскольку погрешность расположения всех базирую
щих и дополнительных опорных поверхностей входит в погрешность базирова
ния заготовки, а следовательно, переносится на погрешность взаимного распо
ложения обработанных поверхностей.
Использование искусственных технологических баз и дополнительных опор
ных поверхностей повышает общую трудоемкость обработки и часто приводит
к дополнительному расходу металла.
1.3.2. НАЗНАЧЕНИЕ ТЕХНОЛОГИЧЕСКИХ БАЗ
Одним из наиболее сложных и принципиальных разделов проектирования
технологических процессов механической обработки является назначение тех
нологических баз. От правильности решения вопроса о технологических базах
в значительной степени зависят: фактическая точность выполнения размеров,
заданных конструктором; правильность взаимного расположения обрабаты
ваемых поверхностей; точность обработки, которую должен выдержать рабо
чий при выполнении запроектированной технологической операции; степень
сложности и конструкция необходимых приспособлений режущих и меритель
ных инструментов; общая производительность обработки заготовок.
При автоматизации производства, развитии гидрокопировальных устройств
(гидрокопировальные суппорты, гидрокопировальные станки и т. д.) и примене
нии станков с ЧПУ, в том числе обрабатывающих центров, значение правильно
го выбора технологических баз еще более возрастает, так как все эти методы
основываются на принципе автоматического получения размеров, в котором тех
нологическая база является одним из основных составляющих элементов.
В связи с изложенным вопрос о выборе технологических баз решается тех
нологом в самом начале проектирования технологического процесса одновре
менно с вопросом о последовательности и методах обработки отдельных по
28
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
верхностей заготовки. При этом, естественно, назначение технологических баз
начинается с выбора технологической базы для выполнения первой операции.
Технологическая база, используемая при первом установе заготовки, назы
вается черновой технологической базой и так же, как и базы, применяемые для
остальных операций технологического процесса, может быть опорной или про
верочной (очевидно, что черновая база не может быть настроечной, так как
последняя обрабатывается при данном установе), однако ее назначение имеет
некоторые особенности. В качестве черновой технологической базы следует
выбирать поверхность, относительно которой при первой операции могут быть
обработаны поверхности, используемые при дальнейших операциях как тех
нологические базы. Для обеспечения точности базирования и надежности за
крепления заготовки в приспособлении черновая база должна иметь достаточ
ные размеры, возможно более высокую степень точности (правильность и по
стоянство формы и взаимного расположения баз у различных заготовок) и
наименьшую шероховатость поверхности. В качестве черновых баз не следует
использовать поверхности, на которых в отливках расположены прибыли и
литники, а также швы, возникшие в местах разъемов опок и прессформ в от
ливках под давлением и штампов в поковках и штамповках.
В связи с тем, что точность необработанных поверхностей черновых баз
всегда ниже точности обработанных поверхностей, а шероховатость — выше
шероховатости обработанных поверхностей, они должны использоваться при
обработке заготовки только один раз, при выполнении первой операции. Все
последующие операции и установы заготовки необходимо осуществлять, ис
пользуя обработанные базовые поверхности. Чтобы обеспечить правильное вза
имное расположение системы обработанных поверхностей заготовки относи
тельно необработанных, для черновых технологических баз целесообразно вы
бирать поверхности, остающиеся необработанными.
При решении вопроса о том, какую из разновидностей технологических баз
лучше всего применить в последующих операциях проектируемого технологиче
ского процесса, следует учесть вышеизложенные данные об особенностях прове
рочных, настроечных и опорных технологических баз. Наиболее целесообразно
и удобно использовать настроечные технологические базы при построении тех
нологического процесса по принципу концентрации операций, когда обработка
заготовки осуществляется за небольшое число сложных по своему содержанию
операций с применением комбинированного многолезвийного и фасонного инст
румента и сложных настроек станков при многопозиционной обработке.
Настроечные технологические базы целесообразно применять также при
использовании методов групповой обработки, групповых настроек, при обра
ботке заготовок с помощью гидрокопировальных суппортов и других копиро
вальных устройств, а также при использовании автоматических станков, рабо
тающих по заданной программе, и обрабатывающих центров.
При разработке технологического процесса обработки крупных и точных
заготовок единичного производства, когда затраты времени на их установку и
выверку составляют лишь незначительную часть основного времени обработки
заготовки, а изготовление крупных и сложных специальных приспособлений,
необходимых при использовании настроечных и опорных технологических баз,
экономически не оправдывается, допускается применение проверочных техно
логических баз.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
29
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
В обычных условиях серийного производства проверочные технологические
базы следует использовать только в виде исключения при обработке особо точ
ных заготовок и сборочных единиц, когда их высокая точность не может быть
достигнута с помощью других разновидностей технологических баз.
При работе с новейшими измерительными и управляющими устройствами,
ускоряющими и автоматизирующими выверку положения заготовок на стан
ках, применение проверочных баз становится рациональным не только при
серийном, но и мелкосерийном производстве, особенно в случае необходимости
достижения высокой точности расположения обрабатываемых поверхностей.
При построении технологического процесса по принципу дифференциации
операций, когда изготовление заготовки производится с помощью большого
числа простых операций, состоящих из одногодвух переходов, осуществляе
мых однолезвийным инструментом, удобнее всего использовать опорные тех
нологические базы. Необходимо при этом следить за тем, чтобы погрешность
установки заготовки в предусмотренном технологическим процессом приспо
соблении, непосредственно входящая в состав общей погрешности выполнения
размеров, проставленных от опорных технологических баз, не была чрезмерно
велика и не вызывала необходимости значительного повышения требований к
точности выполнения размеров и соответствующего усложнения и удорожания
обработки.
Для повышения точности и создания определенности ориентировки заго
товки в приспособлении с помощью опорных технологических баз в качестве
базовых поверхностей следует выбирать поверхности простейшей формы (плос
кости, цилиндрические поверхности), точность обработки которых всегда бы
вает наиболее высокой.
Использование для базирования заготовок сложных контуров может ока
заться целесообразным только для неточных заготовок, так как всегда имею
щиеся погрешности взаимного расположения отдельных элементов фасонных
контуров и неточности размеров этих элементов вносят дополнительную по
грешность и неопределенность в установку заготовок.
Число технологических баз должно быть достаточным для такой ориенти
ровки заготовок, при которой обеспечивается автоматическое получение всех
размеров, выдерживаемых при данной операции. В зависимости от числа и на
правления выдерживаемых при данной операции размеров можно использо
вать одну, две или три базы; при этом заготовка лишается соответственно трех,
четырех, пяти или шести степеней свободы. Увеличение числа баз усложняет
конструкцию приспособлений, что приводит к возрастанию стоимости их изго
товления и снижению эффективности их эксплуатации. В связи с этим следует
ограничиться наименьшим числом технологических баз, которое должно быть
достаточным для обеспечения выполнения всех заданных размеров.
1.3.3. ПОГРЕШНОСТИ БАЗИРОВАНИЯ ЗАГОТОВОК
ПРИ РАЗЛИЧНЫХ СПОСОБАХ
ИХ УСТАНОВКИ И ОБРАБОТКИ
1. Рассмотрим случай фрезерования уступа призматической заготовки при
различных вариантах задания требуемого размера (рис. 1.6).
Вариант 1. Необходимо фрезеровать уступ и выдержать размеры h = 45−−0,17
0,50
(рис. 1.6а).
30
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 1.6
Схемы для расчета погрешностей базирования
Установочная поверхность совпадает с исходной (измерительной), от кото
рой выдерживается данный размер. В этом случае погрешность базирования
(wб) равна нулю (wб = 0).
Вариант 2. Требуется выдержать размер h = 25−−0,12
0,42 (рис. 1.6б).
Установленная поверхность не совпадает с измерительной. В этом случае
погрешность базирования равна допуску на размер H 2 25110,12
0,42 , т. е. w б = 0,4 мм.
Можно перейти к технологическому размеру h¢ = H – h, т. е. к размеру с более
жестким допуском.
h2 3 40110,08
0,18 , при этом 4б 3 0.
Если в рассматриваемом случае допуск на размер между исходной поверх
ностью обработки меньше допуска между исходной и установочной поверхно
стями, то данный способ базирования вообще применять нельзя, так как в этом
случае допуск на расстояние между установочной и обрабатываемой поверхно
стями получается отрицательным (чего не может быть). Поэтому в таких слу
чаях необходимо использовать другую схему установки (рис. 1.6в).
2. Погрешность базирования при установке заготовки по внутренней ци
линдрической поверхности (рис. 1.7).
Рис. 1.7
Схема для расчета погрешности базирования
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
31
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Вариант 1. Необходимо выдержать размер h от оси отверстия до лыски
(рис. 1.7а).
1. Если гарантируется одностороннее и однообразное положение заготовки
(при установке) от режущего инструмента к центру оправки или пальца, то
погрешность базирования (wб) определяется из выражения
wб = S/2 – d/2 (мм),
где S — зазор посадки принятой при такой установке, мм; d — допуск на диа!
метр отверстия, мм.
2. Если не гарантируется указанное одностороннее смещение заготовки при
установке, т. е. если возможна установка одних заготовок со смещением вниз,
а других — вверх или в сторону, то погрешность базирования увеличивается и
равна
wбS + d (мм).
Вариант 2. Требуется выдержать размер h¢ от образующей отверстия до
лыски (рис. 1.7б).
1. При одностороннем (однообразном) смещении заготовки погрешность
базирования eбаз = 0.
2. При возможном смещении заготовок вверх, вниз или вбок погрешность
базирования определяется по формуле wбS + d (мм).
Вариант 3. При установке заготовки на разжимную оправку (рис. 1.7в),
погрешность базирования и для размера h, и для размера h¢ определяется из
выражения wб = 0,5 × d (мм). Если, как, например, при фрезеровании шпоноч!
ного паза, необходимо обеспечить не толь!
ко точный размер от оси или образующей
отверстия до шпоночного паза, но и сов!
падение оси симметрии паза с осью сим!
метрии отверстия, то рассмотренные спо!
собы установки, за исключением установ!
ки на разжимную оправку, непригодны,
так как в процессе обработки нельзя на!
дежно предохранить заготовку от смеще!
ния, вследствие наличия зазора между
заготовкой и жесткой оправкой.
Рис. 1.8
3. Погрешность базирования цилин!
Погрешность базирования цилиндриче!
дрической
заготовки при установке на
ской заготовки при установке на призму
призму (рис. 1.8а).
Вариант 1. Необходимо выдержать размер h от плоскости A до плоскости
фрезерования П. Тогда погрешность базирования:
δ
ωб =
⋅ (sin α + 1) (мм),
2 ⋅ sin α
где d — допуск на диаметр D.
Вариант 2. Необходимо выдержать размер h¢ от нижней образующей B до
плоскости среза. Тогда погрешность базирования:
δ
ω б′ =
⋅ (1 − sin α ).
2 ⋅ sin α
32
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Вариант 3. Необходимо выдержать размер h² от оси заготовки до плоскости
среза. Тогда погрешность базирования:
δ
ω б′′ =
.
2 ⋅ sin α
При a = 45° получим следующие значения погрешностей базирования для
рассмотренных случаев:
2б 3 1,24;
При a = 90°:
2б 3 4;
21б 3 0,214;
21б 3 0;
211б 3 0,714.
211б 3 0,54.
Значение ω б′ = 0 подтверждает положение о том, что при выборе исходной
поверхности в качестве установочной базы можно избежать погрешности бази#
рования. Следовательно, в варианте 1 установку целесообразно осуществлять
от образующей A, а при варианте 2 — от образующей B (рис. 1.8б). В третьем
случае заготовку следует устанавливать в центрах.
1.4. УСТАНОВОЧНЫЕ ЭЛЕМЕНТЫ
ПРИСПОСОБЛЕНИЙ
Требуемое положение обрабатываемой заготовки в приспособ#
лении и его неизменность в процессе всей обработки обеспечиваются устано#
вочными и зажимными элементами.
Обрабатываемая заготовка своими базовыми поверхностями опирается на
установочные элементы (УЭ), которые называются опорами.
1.4.1. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К УСТАНОВОЧНЫМ ЭЛЕМЕНТАМ ПРИСПОСОБЛЕНИЙ
1. Длительное сохранение точности и неизменность положения УЭ.
Это требование обеспечивает длительную работу без брака, а также сокра#
щает сроки ремонта приспособлений. Не допускается использовать корпус при#
способления как УЭ.
2. Количество и расположение УЭ должно обеспечивать необходимую ори#
ентацию заготовки согласно принятой в технологическом процессе схеме.
Для того чтобы обрабатываемая заготовка имела устойчивое положение на
основных опорах, последние следует располагать на максимально возможном
расстоянии друг от друга; причем так, чтобы силы резания и силы зажима
находились либо против опор, либо между ними, но вблизи какой#либо опоры.
3. При базировании на грубые поверхности (Rz ³ 80) рекомендуется исполь#
зовать УЭ с ограниченной поверхностью соприкосновения.
4. УЭ не должны портить базовые поверхности, что особенно важно, если
эта поверхность в дальнейшем не обрабатывается.
5. УЭ не должны максимально возможное время изменять свои размеры и
форму, т. е. они должны быть износоустойчивыми.
Так как опоры воспринимают, кроме веса заготовки, еще силы зажима и
силы резания, которые могут быть весьма значительными, то их надо изготав#
ливать из высокопрочных, износостойких материалов. Поэтому для опор при#
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
33
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
меняют хромистую сталь 20Х и конструкционную сталь 20 с закалкой до твер
дости НRС 43–52 и цементацией рабочих поверхностей опор на глубину 0,8–
1,2 мм. Применяют также сталь 45 (HRС 48–52) и для особо ответственных
случаев сталь У7 или У8 (HRС 62–65).
6. УЭ должны быть жесткими. В целях повышения жесткости УЭ (их рабо
чую поверхность) целесообразно подвергать шабрению, шлифованию, доводке.
7. В целях ускорения и облегчения ремонта УЭ должны быть легкосмен
ными.
1.4.2. ВИДЫ ОПОР
Опоры можно разделить на две группы — основные и вспомогательные
(рис. 1.9).
Основными называются неподвижные опоры, координирующие обрабаты
ваемую заготовку в приспособлении в трех взаимно перпендикулярных плос
костях, т. е. опоры, лишающие заготовку всех степеней свободы относительно
приспособления. Максимальное необходимое число таких опор равно шести
(т. е. правило шести точек при базировании заготовки).
Вспомогательные опоры вводятся в установочную систему не в целях бази
рования, а для повышения жесткости и устойчивости системы, а также для
противодействия силам резания. Вспомогательные опоры бывают самоустанав
ливающимися и подводимыми.
ОСНОВНЫЕ ОПОРЫ
Основные опоры бывают жесткими и регулируемыми. Жесткие опоры при
меняются в виде штырей, пластин, призм и пальцев.
Опорные штыри
ГОСТ 1344088; ГОСТ 1344188.
Опорные штыри (рис. 1.10) бывают трех видов:
1) штыри с гладкой плоской поверхностью (предназначены для установки
заготовок с обработанными установочными плоскостями; рисунок 1.10а);
2) штыри со сферической головкой (для заготовок с необработанными плос
костями; рисунок 1.10б). Как наиболее изнашивающиеся, применяются в слу
чаях особой необходимости, например при установке узких деталей необрабо
танной поверхностью, чтобы получить максимальное расстояние между опор
ными точками;
3) штыри с насеченной головкой (для заготовок с необработанными плоско
стями; рисунок 1.10в). Применяют для установки заготовок по необработан
ным боковым поверхностям, так как они обеспечивают более устойчивое поло
жение обрабатываемой заготовки.
В приспособлении штыри обычно устанавливают по посадке H7/m6 или
H7/n6. Опорные площадки на корпусе для головок штырей делают немного
выступающими для того, чтобы их одновременно можно было обрабатывать в
одной плоскости. Часто в отверстия корпуса приспособления запрессовывают
переходные закаленные втулки, в которые штыри входят по посадке H7/h6
или H7/js6. Применение переходных втулок сокращает время на ремонт при
способлений (рис. 1.10г).
34
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
Рис. 1.10
Опорные штыри
Рис. 1.9
Классификация установочных элементов приспособлений
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
35
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Регулируемые опоры. Регулируемые опоры (только штыри) (ГОСТ 408488;
408588; 408688) (рис. 1.11) используются в качестве установочных элементов
и обеспечивают путем регулирования их положения компенсацию износа по
высоте или изменение размера при наладке приспособления. Применяются,
как правило, на предварительных операциях при установке заготовок по необ
работанным (черновым) базовым поверхностям.
Рис. 1.11
Винтовые регулируемые опоры приспособлений:
а — вертикальное исполнение; б — горизонтальное.
Опорные пластины (рис. 1.12). ГОСТ 474388. Наиболее распространенны
ми являются конструкции пластин двух типов. Пластины закрепляются на
корпусе приспособления двумя или тремя винтами М6, М8, М10 или М12 в
зависимости от размера ее поперечного сечения и размера приспособления.
Головки винтов, крепящих пластину, должны утопать на 2–3 мм относительно
рабочей плоскости пластины. Это образует углубления, где скапливается мел
кая стружка, что создает трудности при очистке приспособления. Поэтому та
кие пластины (пластины I типа) целесообразно применять только в качестве
вертикальных или верхних опор, их можно использовать также в качестве
предварительных горизонтальных направляющих для загрузки обрабатывае
мых заготовок в приспособление.
Рис. 1.12
Опорные пластины:
а — сплошные; б — с пазами.
36
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Стремление получить наиболее компактную конструкцию привело к созда
нию пластин с косыми углублениями для отверстий под винты (пластины
II типа). Косое расположение пазов позволяет непрерывно направлять обраба
тываемую заготовку при ее перемещении по пластине и способствует эффек
тивной очистке установочной поверхности.
Опорные призмы (рис. 1.13). ГОСТ 1219386; ГОСТ 1219786. Для установ
ки заготовок наружными цилиндрическими поверхностями чаще всего исполь
зуются призмы.
Призмой в приспособлениях принято называть УЭ с рабочей поверхностью
в виде паза, образованного двумя плоскостями, наклоненными под углом 2a,
равным 60, 90 или 120°.
В дополнение к крепежным винтам применяют два контрольных штифта.
Эти штифты без зазора пригоняются как по отверстиям призмы, так и по отвер
стиям корпуса приспособления.
Рис. 1.13
Опорные призмы:
а — призмы для установки небольших заготовок с базированием по обработанным поверхностям; б —
призмы с выемкой для установки длинных заготовок; 1 — крепежные винты; 2 — направляющие
штифты.
Установочные пальцы (рис. 1.14). ГОСТ 1220986; ГОСТ 1221186. Паль
цами в приспособлениях называются детали, на которые обрабатываемая заго
товка надевается своими обработанными отверстиями. Обычно используются
два пальца, так как большее количество не повышает точность установки заго
товки, а создает сложности при расчетах, изготовление приспособления при
этом значительно усложняется. Пальцы бывают постоянными и сменными.
Установочные пальцы запрессовывают в корпус приспособления с исполь
зованием переходных посадок m или n по 7му или 8му квалитетам или сво
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
37
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 1.14
Установочные пальцы:
а — установка пальцев в корпус; б — установка пальцев в корпус через переходную втулку; в —
палец цилиндрический срезанный; г — палец конический срезанный.
бодно вставляют в него с последующим затягиванием винтом или гайкой. При
необходимости быстро менять пальцы вследствие их износа применяются смен
ные пальцы, которые в корпусе приспособления вставляются через закален
ную переходную втулку.
Конические установочные пальцы (рис. 1.14г) применяют при установке
заготовки по коническим отверстиям или по необработанным отверстиям. При
этом заготовка устанавливается по окружности отверстия. Для облегчения цен
трирования конические пальцы срезают плоскостями под углом 120°.
При установке заготовки на два пальца боковые поверхности одного из них
делают срезанными (рис. 1.14в). Также срезают палец при установке заготов
ки не на два, а на один палец и на плоскость, параллельную его оси.
ВСПОМОГАТЕЛЬНЫЕ ОПОРЫ
В практике используются два типа вспомогательных опор: самоустанав
ливающиеся и подводимые (рис. 1.15 и 1.16).
Самоустанавливающиеся опоры применяют, как правило, для уменьше
ния вибраций в технологической системе при обработке негабаритных загото
вок малой жесткости.
Подводимые опоры используются в
качестве вспомогательных опор, когда
необходимо повысить жесткость и ус
тойчивость обрабатываемой заготовки.
Их доводят до соприкосновения с обра
батываемой заготовкой после того, как
она установлена на основные базовые
Рис. 1.15
поверхности и закреплена.
Самоустанавливающаяся опора
ОПРАВКИ
Для заготовок, имеющих внутреннюю цилиндрическую поверхность, в ка
честве установочных элементов на токарных или шлифовальных операциях
применяют оправки (рис. 1.17).
38
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 1.16
Подводимая опора
Рис. 1.17
Оправки:
а — коническая; б — цилиндрическая оправка с гарантированным зазором; в — оправка под
запрессовку.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
39
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Оправки подразделяются на жесткие и разжимные. Жесткие оправки мо
гут быть конические, цилиндрические для посадки заготовок с гарантирован
ным натягом, цилиндрические для посадки заготовок с гарантированным за
зором.
На стенке заготовки устанавливают в центре с помощью конусного хвосто
вика или фланца. Центровые оправки имеют центровые гнезда. Для того, что
бы сообщить оправке вращательное движение, на левом конце оправки делают
квадрат, лыски или устанавливают поводок.
ПОГРЕШНОСТЬ УСТАНОВКИ
Погрешность установки заготовки в приспособлении определяется ошибка
ми изготовления и сборки его УЭ (wус.эл) и их прогрессирующим износом (wизн).
Составляющая wус.эл характеризует неточность положения УЭ приспособ
ления. При использовании одного приспособления она представляет собой си
стематическую постоянную погрешность, и ее, как правило, можно частично
или почти полностью устранить соответствующей настройкой станка.
При использовании нескольких одинаковых приспособлений эта величина
не компенсируется настройкой станка и входит полностью в состав wпр (по
грешность приспособления). Технологические возможности изготовления при
способлений в современных инструментальных цехах обеспечивают выдержи
вание wус.эл в пределах 0,010–0,005 мм, а для прецизионных приспособлений с
еще более высокой точностью.
Составляющая wизн характеризует изменение положения контактных по
верхностей установочных элементов в результате их износа в процессе экс
плуатации приспособления. Интенсивность износа УЭ зависит от их конструк
ции и размеров, материала и веса заготовки, состояния ее базовой поверхно
сти, а также условий установки заготовки и снятия ее.
Больше всего изнашиваются постоянные и регулируемые опоры, у которых
контакт с заготовкой осуществляется по малым площадкам. Сильному износу
подвержены боковые поверхности призм. Менее интенсивно изнашиваются
опорные пластины. Черновые базовые поверхности заготовок изнашивают опо
ры приспособлений сильнее, чем обработанные базы. Износ возрастает с увели
чением веса заготовки.
Износ опор обычно неравномерен по их поверхности и во времени. В основ
ном он носит местный характер. Опорные пластины чаще изнашиваются в се
редине и с одного края, а пальцы — со свободного конца.
Износ УЭ приспособлений изучен недостаточно полно. Величину износа
опоры U, мкм, можно приближенно выразить формулой:
U 1 2 N,
где N — количество контактов заготовок с опорой; b — постоянная, зависящая
от вида опор и условий контакта.
Для штырей со сферической головкой b = 0,5–2,0; для призм (при установ
ке заготовок с обработанными поверхностями) b = 0,3–0,8; для опорных пла
стин b = 0,02–0,04; для гладких установочных пальцев b = 0,05–0,10; для сре
занных пальцев b = 0,2–0,6. Большие значения b берут для более тяжелых усло
40
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
вий работы опор по нагрузке, пути сдвига, времени неподвижного контакта
и абразивному действию заготовки. Приведенные данные относятся к опорам
из стали 20, 20Х и 45. Износ опор из стали У8А уменьшается на 10–15%, хро$
мированных в 2–3 раза и наплавленных твердым сплавом — в 7–10 раз.
Исходя из требуемой точности установки, износ опор регламентируют зара$
нее рассчитанной величиной. Износ контролируется при плановой периодиче$
ской проверке приспособлений. Если износ достиг предельно допустимой вели$
чины, приспособление подвергается ремонту путем смены опор.
1.5. ЗАЖИМНЫЕ УСТРОЙСТВА ПРИСПОСОБЛЕНИЙ.
МЕТОДИКА РАСЧЕТА СИЛ ЗАЖИМА
Зажимными устройствами (ЗУ) приспособлений называются
механизмы, которые удерживают обрабатываемую заготовку от смещения и
вибраций, возникающих под действием силы резания.
Основное назначение ЗУ приспособления заключается в обеспечении на$
дежного контакта заготовки с УЭ и предупреждении ее смещения в процессе
обработки.
Введением дополнительных ЗУ увеличивают жесткость технологической
системы, за счет чего достигается повышение точности и качества обработки и
ее производительности.
Необходимость применения ЗУ отпадает, если обрабатывается тяжелая за$
готовка, при условии, что силы резания малы по сравнению c весом. Необходи$
мость закрепления отпадает также, если силы, возникающие при обработке,
приложены так, что они прижимают заготовку к УЭ.
1.5.1. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К ЗАЖИМНЫМ УСТРОЙСТВАМ
1. Надежность работы. Простота конструкции. Удобство, простота и безо$
пасность в обслуживании. Высокая износостойкость.
2. ЗУ не должны вызывать деформации закрепляемых заготовок и порчи
их поверхности.
3. Закрепление и открепление заготовок должно производиться с минималь$
ной затратой сил и времени рабочего.
4. Силы резания должны по возможности восприниматься не ЗУ, а более
жесткими УЭ приспособлений. Усилия зажима должны направляться нормаль$
но к установочным поверхностям и как можно ближе к обрабатываемым по$
верхностям.
5. ЗУ должны обеспечивать равномерность зажима, особенно при закрепле$
нии нескольких заготовок в многоместных приспособлениях. Они не должны
сдвигать заготовку в процессе ее закрепления.
1.5.2. МЕТОДИКА РАСЧЕТА СИЛ ЗАЖИМА
Расчет сил зажима производится в двух основных случаях. Первый случай
характерен при конструировании новых приспособлений, второй имеет место
при использовании имеющихся приспособлений с ЗУ, развивающими опреде$
ленную силу.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
41
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
В первом, наиболее общем, случае надо знать:
а) условия проектируемой обработки;
б) величину, направление и место приложения сил, сдвигающих заготовку;
в) схему ее установки и закрепления.
К обрабатываемой заготовке приложены силы, возникающие в процессе
обработки, искомые зажимные силы и реакции опор. Под действием этих сил
заготовка должна находиться в равновесии. При расчетах следует принимать
наибольшие силы зажима.
Во втором, более частном, случае расчет зажимной силы носит провероч%
ный характер. Найденная из условий обработки необходимая зажимная сила
должна быть меньше или быть равна той силе, которую развивает ЗУ исполь%
зуемого приспособления.
Расчет усилия зажима может быть сведен к решению задачи статистики на
равновесие заготовки под действием системы внешних сил и моментов, возни%
кающих при ее обработке. В общем виде необходимо решить четыре уравнения:
2 Px 1 0;
2 Py 1 0;
2 Pz 1 0;
2 M 1 0.
В каждом частном случае количество уравнений может быть уменьшено.
Величина составляющих силы резания и их моментов определяется по из%
вестным формулам теории резания материалов или выбирается по норматив%
ным справочникам.
Так как на самом деле при обработке заготовок в приспособлениях действу%
ют законы динамики, то в расчеты по определению необходимых сил закрепле%
ния заготовок вводится коэффициент запаса K.
Он учитывает неоднородность обрабатываемых заготовок, затупление ре%
жущего инструмента и связанное с ним увеличение силы резания, а также
непостоянство установки и закрепления заготовок. Применение в расчетах сред%
него значения K неправильно. При малых значениях K надежность ЗУ недо%
статочна. При больших значениях K получают увеличение силы зажима, что
влечет за собой увеличение размеров зажимных устройств, металлоемкость
и пр., а следовательно, ведет к увеличению стоимости приспособления в целом.
В зависимости от конкретных условий построения технологических опера%
ций значение K следует выбирать дифференцированно. Величину K можно пред%
ставить как произведение первичных коэффициентов:
K = K 0 × K1 × K2 × K3 × K4 × K5 × K 6 ,
где K0 — гарантированный коэффициент запаса, для большинства случаев реко%
мендуется брать равным 1,3–1,5; K1 — коэффициент, учитывающий неравно%
мерность величины припуска, при черновой обработке K1 = 1,2, а при чистовой
K1 = 0; K2 — коэффициент, учитывающий увеличение силы резания от про%
грессирующего затупления режущего инструмента (K2 = 1,0–1,9); K3 — коэф%
42
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
фициент, учитывающий увеличение силы резания при прерывистом резании,
при точении и торцовом фрезеровании K3 достигает величины 1,2; K4 — коэф
фициент, учитывающий нестабильность закрепления ЗУ, при ручном приводе
K4 = 1,3, при мембранных ЗУ K4 = 1,2, при применении пневмо или гидравли
ческих ЗУ K4 = 1,0; K5 — коэффициент, учитывающий удобство расположения
рукояток в ЗУ. При удобном расположении рукояток и малом диапазоне угла
их поворота K5 = 1,0, а при большом диапазоне угла поворота (более 90°)
K5 = 1,2; K6 — коэффициент, учитывающий наличие моментов, стремящихся
повернуть заготовку. Если заготовка установлена базовой плоскостью на опо
ры с ограниченной поверхностью контакта, K6 = 1,0. Если заготовка установ
лена на планки или другие элементы с большой поверхностью контакта, K6 мо
жет достигать величины 1,5.
Схема закрепления заготовки в приспособлении (т. е. точки приложения
сил крепления и направление действия этих сил) выбирается конструктором
одновременно со схемой базирования с учетом конкретных условий выполне
ния операции. В практике встречаются приспособления, в которых заготовка
закрепляется одновременно с нескольких сторон или с одной стороны в не
скольких местах. При этом в одном случае закрепление производится посред
ством автономного ЗУ для каждого места зажима, а в другом — посредством
одного ЗУ многократного действия.
Рис. 1.18
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
43
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
В первом случае после определения усилия зажима Q1, Q2, ..., Qn произво
дится поочередный расчет ЗУ, создающих эти усилия, а во втором делают рас
чет исходя из усилия, равного произведению n × Q (n — кратность ЗУ) или исхо
дя из необходимого зажимного усилия Qn, где Qn < Qi.
При расчете ЗУ с помощью компьютера можно воспользоваться одним из
двух вариантов алгоритмов расчета (рис. 1.18).
1.5.3. ПРИМЕРЫ ОПРЕДЕЛЕНИЯ УСИЛИЯ ЗАЖИМА
ДЛЯ РАЗЛИЧНЫХ СЛУЧАЕВ ЗАКРЕПЛЕНИЯ ЗАГОТОВКИ
ЗАЖИМНОЕ УСТРОЙСТВО, ПРЕДУПРЕЖДАЮЩЕЕ
СМЕЩЕНИЕ ЗАГОТОВКИ ОТ ДЕЙСТВИЯ СИЛЫ
Силы обработки P и зажима Q (рис. 1.19а) прижимают заготовку к опорам
приспособления (обтачивание в центрах, цекование бобышек и пр.).
При постоянном значении P сила Q = 0. Если при обработке возникают вто
ростепенные сдвигающие силы N, направленные против ЗУ, то Q = K × N, где
K > 1. При нестабильном P (например, фрезеровании) Q > 0.
Сила обработки P направлена против силы зажима (долбление, протягива
ние и пр.). При этом должно соблюдаться условие: Q = K × P (рис. 1.19б).
Силы обработки (рис. 1.19в) стремятся сдвинуть заготовку от УЭ (фрезеро
вание замкнутых контуров). При этом должно соблюдаться неравенство:
P < Q × f1 + Q × f2 ,
где f1 и f2 — коэффициенты трения заготовки с установочными и зажимными
элементами.
Вводя коэффициент запаса K, получаем:
Q = K × P/(f1 + f2).
Рис. 1.19
Схема сил, действующих на закрепляемую заготовку при ее обработке
44
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Силы обработки (рис. 1.19г) направлены против опор и одновременно стре
мятся сдвинуть заготовку в боковом направлении (цилиндрическое фрезеро
вание).
По аналогии с предыдущим примером
Q3
K 1 P2 2 P1 1 f
.
f1 4 f2
Силы обработки (рис. 1.19д) направлены против ЗУ и одновременно стре
мятся сдвинуть заготовку в боковом направлении (фрезерование с косым зубом).
Условие для горизонтальной плоскости:
Q33 4
P1 1 f2 2 K2 1 P2
.
f1 2 f2
Условие для вертикальной плоскости: Q¢ = K1P1. Из данных значений Q² и
Q¢ выбирается наибольшее и принимается за расчетную величину Q необходи
мой зажимной силы.
ЗАЖИМНОЕ УСТРОЙСТВО, ПРЕДОТВРАЩАЮЩЕЕ
ПРОВЕРТЫВАНИЕ ЗАГОТОВКИ ОТ ДЕЙСТВИЯ МОМЕНТА СИЛ
1. Заготовка, установленная в трехкулачковом патроне, находится под дей
ствием момента M и осевой силы P (рис. 1.20а).
Рис. 1.20
Зажимные устройства, предотвращающие поворот заготовки от действия момента
Силу зажима можно определить из выражения
Q2
K1M
.
31f 1 R
При больших значениях P могут возникать дополнительные силы трения
между торцом заготовки и уступами кулачков.
Тогда
Q3
K 1 M 2 f2 1 R1 1 P
.
3 1 f1 1 R 2 3 1 f1 1 f2 1 R
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
45
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
2. Заготовка устанавливается на кольцевую торцевую поверхность (рис.
1.20б). Здесь
K 1 M 2 1/3 1 f2 1 P 1 ( D3 2 d3 )/( D2 2 d2 )
Q3
.
1/3 1 f2 1 ( D3 2 d3 )/( D2 2 d2 ) 4 f1 1 R2
3. Заготовка центрируется по выточке и прижимается к трем опорам (рис.
1.20в). В процессе обработки возникают сдвигающий момент и осевая сила P.
При равных реакциях опор сила находится из формулы
Q3
K 1 M 2 f2 1 P 1 R
.
f2 1 R2
4. Цилиндрическая заготовка закреплена в призме с углом a (рис. 1.20г).
Без учета трения на торце:
Q2
K1M
f1 1 R 3 f2 1 R
1
sin 4 /2
.
Если заготовка сдвигается осевой силой P вдоль призмы, то необходимая
сила зажима определяется из выражения
Q2
K1P
f1 3 f2 1
1
sin 4 /2
.
Результаты исследований показывают, что при контакте поверхностей об*
рабатываемых заготовок с установочными и зажимными элементами коэффи*
циент статического трения мало зависит от высоты шероховатости поверхно*
сти заготовок (Rz), удельного давления, материала заготовок и наличия следов
смазочно*охлаждающей жидкости. Для расчетов коэффициента трения можно
принимать следующее выражение:
f 1 f1 1 f2 1 0,16 2 (0,15–0,18).
1.6. РАСЧЕТ ТОЧНОСТИ ИЗГОТОВЛЕНИЯ
ПРИСПОСОБЛЕНИЯ
Расчет точности изготовления приспособления производится
конструктором после анализа и составления расчетной схемы приспособления.
По схеме установки для анализируемого параметра определяются погреш*
ность базирования wб и погрешность закрепления wзак.
Затем находится погрешность установки:
wу = w б + w зак.
(1.2)
Допустимая погрешность установки:
[ω]у = δ2 − (k ⋅ ω обр )2 ,
(1.3)
где k — поправочный коэффициент, k = 0,6–0,8; d — допуск выдерживаемого
параметра заготовки при обработке на данной операции; wобр — средняя эконо*
мическая точность обработки заготовки по предыдущей операции.
46
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Условие правильности выбранной схемы установки:
wу < [w]у.
(1.4)
Если wу превышает [w]у, то необходимо изменить схему базирования или
конструкцию приспособления.
При обработке плоскостных заготовок, а также торцовых поверхностей тел
вращения и при получении линейных размеров векторы wб и wзак суммируются
арифметически:
wу = w б + w зак.
При обработке поверхностей вращения и получения диаметральных разме%
ров векторы wб и wзак суммируются по правилу квадратного корня:
ω у = ω2б + ω2зак .
Данные о погрешностях при различных видах обработки и погрешностях
закрепления приведены в справочниках.
Суммарная погрешность приспособления wпр, исходя из условий обеспече%
ния при обработке заданной точности (по чертежу) соответствующего парамет%
ра детали:
ω пр ≤ δ − ω2у + (k ⋅ ω обр )2 .
(1.5)
Суммарная погрешность приспособления распределяется по составляющим
звеньям:
(1.6)
ω пр = ∑ δ i + ω уп + ω з + ω п ,
где 2 1i — допуски на изготовление деталей приспособления, входящих своими
размерами в анализируемую размерную цепь; wуп — погрешность установки
приспособления на станке; wз — погрешность, вызванная наличием конструк%
тивных зазоров, необходимых для посадки заготовки на УЭ приспособления,
при установке заготовки в приспособление без зазоров, wз = 0; wп — погреш%
ность перекоса или смещения инструмента, возникающая из%за неточности из%
готовления направляющих элементов приспособления. Если направляющие
отсутствуют, wп = 0.
При направлении инструмента по кондукторным втулкам wп определяется
по формуле
wп = S(H + d)/3H,
(1.7)
где S — наибольший зазор между отверстием в кондукторной втулке и сверлом
(ГОСТ 3047%54); H — высота кондукторной втулки (для стандартных втулок
принимается по ГОСТ 18429%73); d — диаметр сверла, мм.
Допуск на требуемый параметр собранного приспособления, обеспечиваю%
щий точность данного параметра заготовки при обработке:
δ с = ∑ δ i = ω пр − (ω уп + ω з + ω п ).
(1.8)
Нулевые и отрицательные значения wпр недопустимы.
Теоретические основы расчета и проектирования приспособлений
Powered by TCPDF (www.tcpdf.org)
47
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Если величины dc или di выдержать экономически трудно или невозможно,
то необходимо внести изменения в конструкцию приспособления и сделать пе
рерасчет.
Величина dc проставляется на сборочном чертеже приспособления для тре
буемого параметра.
Формулу (1.8) можно представить с учетом выражений (1.2)–(1.7) в следую
щем виде:
δ c = δ − (ω б + ω зак )2 + (k ⋅ ω обр )2 − [ω з + ω уп + S ⋅ ( H + d)/3H ]
или
1
2
3c 4 3 5 (6б 7 6зак )2 7 (k 8 6обр )2 5 6з 5 6уп 5 S 8 ( H 7 d)/3H.
(1.9)
(1.10)
Для упрощения формулы (1.10) введем условное обозначение:
y1 1 2 3 (4б 5 4зак )2 5 (k 6 4обр )2 3 4з 3 4уп ;
y2 1 4п 1 S 6 ( H 5 d)/3H.
Таким образом,
d с = y = y 1 + y2 .
На рисунке 1.21 представлена структурная схема алгоритма расчета точно
сти приспособления с помощью компьютера, где формульные обозначения по
грешностей заменены буквами греческого алфавита.
Рис. 1.21
48
Powered by TCPDF (www.tcpdf.org)
Глава 1
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ЗАЖИМНЫЕ МЕХАНИЗМЫ
ПРИСПОСОБЛЕНИЙ
Зажимными элементами приспособлений называются меха
низмы, удерживающие обрабатываемую заготовку от смещения и от вибраций,
возникающих под действием силы резания.
Основное назначение зажимных устройств приспособлений заключается в
обеспечении надежного контакта заготовки с установочными элементами и
предупреждении ее смещения в процессе обработки.
Введением дополнительных зажимных устройств увеличивают жесткость
технологической системы, за счет чего достигается повышение точности и ка
чества обработки и ее производительности.
Необходимость применения зажимных устройств отпадает, если обрабаты
вается тяжелая заготовка, при условии, что силы резания малы по сравнению с
весом. Необходимость закрепления отпадает также, если силы, возникающие
при обработке, приложены так, что они прижимают заготовку к установочным
элементам.
Требования, предъявляемые к зажимным устройствам:
1) надежность работы;
2) простота конструкции;
3) удобство, простота и безопасность в обслуживании;
4) высокая износостойкость;
5) зажимные устройства не должны вызывать деформации закрепляемых
заготовок и порчи их поверхности;
6) закрепление и открепление заготовок должно производиться с минималь
ной затратой сил и времени рабочего;
7) силы резания не должны по возможности восприниматься зажимными
устройствами. Они должны восприниматься более жесткими установочными
элементами приспособления. Усилия зажима должны направляться нормаль
но к установочным поверхностям и как можно ближе к обрабатываемым по
верхностям;
8) зажимные устройства должны обеспечивать равномерность зажима, осо
бенно при закреплении нескольких заготовок в многоместных приспособлени
ях. Они не должны сдвигать заготовку в процессе ее закрепления.
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
49
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Различают элементарные и комбинированные зажимные механизмы. К эле
ментарным зажимным устройствам относятся простейшие механизмы, непо
средственно используемые для закрепления заготовок или выполняющих роль
промежуточных звеньев в более сложных зажимных системах. Выделяют сле
дующие элементарные зажимные устройства: винтовые, эксцентриковые, кли
новые, рычажные.
Комбинированные зажимные механизмы сочетают в себе несколько эле
ментарных механизмов.
2.1. ВИНТОВЫЕ ЗАЖИМЫ
Широкое распространение винтовых устройств объясняется их
сравнительной простотой, универсальностью и безотказностью в работе. Одна
ко простейший зажим в виде индивидуального винта, действующего на заго
товку непосредственно, находит ограниченное применение, так как в месте его
действия заготовка деформируется.
Номинальный наружный диаметр винта d, мм, определяется по формуле
d=c
Q
,
σ
где c — коэффициент (для основной метрической резьбы c = 1,4); Q — сила за
крепления, Н; s — напряжение растяжения (сжатия). Для винтов из стали 45
величину напряжения можно брать с учетом износа резьбы в пределах 8–10 МПа.
Величина расчетного диаметра округляется до ближайшего большего зна
чения. В приспособлениях применяют резьбы от М6 до М48.
Вариант 1. Зажим осуществляется гайкой (рис. 2.1). В этом случае при за
винчивании гайки момент силы, приложенной к гаечному ключу, расходуется
на преодоление момента М2 — силы трения в резьбовом соединении и момента
М3 — силы трения на опорной поверх
ности гайки. Момент завинчивания гай
ки определяется по формуле
M = P × l,
(2.1)
где P — сила, приложенная к гаечному
ключу, H; l — расчетная длина ключа
или рукоятки, мм.
Момент силы трения в резьбовом со
единении определяется из выражения
dcp
(2.2)
3 tg(4 5 61),
2
где Q — осевая сила зажима, Н; dср —
средний диаметр резьбы, мм; l — угол
подъема винтовой линии резьбы, град;
r¢ = arctgf/cosa — приведенный угол тре
ния в резьбе (f — коэффициент трения,
а — угол профиля резьбы).
М1 2 Q 3
Рис. 2.1
Зажим заготовки с помощью гайки
50
Powered by TCPDF (www.tcpdf.org)
Глава 2
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Момент силы трения на опорной поверхности гайки:
D3 1 D03
(2.3)
M2 2 Q 3 f1 /3 3 2
,
D 1 D02
где f1 — коэффициент трения на опорной поверхности гайки (можно принять
f1 = f); D — диаметр опорной поверхности; D0 — диаметр отверстия для болта в
шайбе, мм.
Из условия равновесия затянутой системы деталей можно записать
M = M1 + M2
или, подставляя значения из полученных ранее выражений (2.2) и (2.3) и пре#
образовав, получим
Q2
P1l
,
Rср 1 tg(3 4 51 ) 4 f 6 1 D0
(2.4)
где Rcp = dcp/2; K = D/D0; j = K3 – 1/3(K2 – 1).
При расчетах можно пользоваться упрощенной формулой
Q = P × l/0,2 × d.
При этом максимальная погрешность расчета не будет превышать 3–5%.
Вариант 2. Зажим осуществляется торцевой частью винта (рис. 2.2), при
этом величина силы зажима будет зависеть от формы торца винта и от формы
поверхности, на которую опирается винт.
Момент, развиваемый на рукоятке или маховичке, для получения задан#
ной силы закрепления Q:
M = rср × Q × tg(a + r) + Mтр,
где rcp — средний радиус резьбы, мм; a — угол подъема резьбы; r — угол тре#
ния в резьбе; Mтр — момент на опорном торце винта:
D3 1 D03
Мтр 2 1/3 3 f 3 Q 3 2
.
D 1 D02
Рис. 2.2
Винтовые зажимы
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
51
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 2.3
Нормализованные винтовые зажимы
Принимая r = 10°30¢; rcp = 0,45d; D = 1,7d; D0 = d и f = 0,15, получим:
· для винтов со сферическим торцом (рис. 2.2а)
M » 0,1 × d × Q;
· для винтов с плоским торцом (рис. 2.2б)
M = 0,1 × d × Q + f × Q × D0/3;
· для винтов с башмаком (рис. 2.2в), предупреждающих минимальную пор
чу поверхности заготовки
M = 0,1 × d × Q + R × f × ctgb/2 × Q,
при b = 120° и f = 0,15
M = 0,1 × Q × (d + R).
Примеры конструкций винтовых зажимов приведены на рисунке 2.3.
2.2. ЭКСЦЕНТРИКОВЫЕ ЗАЖИМЫ
Это быстродействующие, самотормозящиеся механизмы. Основ
ными элементами их являются цилиндрические или эксцентриковые кулачки
и кулачковые валики. Зажим с помощью этих устройств осуществляется зна
чительно быстрее, чем с помощью винтовых, но возможность их применения
более ограничена. Объясняется это тем, что эксцентриковые зажимы хорошо
работают только при незначительных отклонениях размеров поверхностей, по
которым обрабатываемые заготовки укрепляются, и при отсутствии вибраций
заготовок в процессе обработки. Наиболее часто применяются эксцентрики при
сверлильных операциях.
52
Powered by TCPDF (www.tcpdf.org)
Глава 2
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Круглые эксцентрики рекомендуется изготавливать из сталей 20Х, 40Х, с
цементацией на глубину 0,8–1,2 мм и последующей закалкой до твердости НRС
45–48.
Исходными данными для определения основных размеров эксцентрика яв%
ляются:
· d — допуск на размер заготовки от ее установочной базы до места приложе%
ния зажимной силы, мм;
· a — угол поворота эксцентрика от начального положения, град;
· Q — сила зажима заготовки, Н.
При отсутствии ограничения угла поворота эксцентрика его эксцентриси%
тет e определяется из условия:
2e = S1 + d + S2 + Q/J,
где S1 — зазор, обеспечивающий свободу установки заготовки под эксцентрик;
S2 — запас хода эксцентрика; J — жесткость зажимного устройства.
Приняв S1 = 0,2–0,4 мм и S2 = 0,4–0,6 мм, получим
e = d/2 + Q/2J + (0,3–0,5) мм.
При ограничении угла поворота эксцентрика (a значительно меньше 180°)
величину e находят из выражения:
S1 1 2 1 Q J
.
1 4 cos 5
Полученные размеры дискового эксцентрика e; r; R и др. необходимо увя%
зать с ГОСТ 9061%88.
Для установления зависимости между силой зажима Q и моментом на руко%
ятке эксцентрика закрепления заготовки рассмотрим схему, представленную
на рисунке 2.4, где N — сила на рукоятке; S — реакция цапфы; l — длина
рукоятки эксцентрика; T — реакция заготовки, которая представляет собой
равнодействующую силы Q и силы трения F.
Сумма моментов всех действующих
сил относительно оси поворота эксцен%
трика равна нулю:
N × l – Q × e × sina¢ – f × Q × (R + e × cosa¢) –
– S × r = 0,
где f — коэффициент трения скольже%
ния между эксцентриком и заготовкой;
r — радиус цапфы.
Сила S мало отличается от нормаль%
ной силы Q. Приняв S » Q, найдем мо%
мент силы на рукоятке эксцентрика
N × l = Q[f × R + r + e × (sina¢ + f × cosa¢)].
e3
Для упрощения полученного выра%
жения примем:
1) f × R = tgj × R » sinj × R (j — угол
покоя; для j = 6° погрешность менее
1%);
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
Рис. 2.4
Схема эксцентрикового зажимного
устройства
53
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
2) sina¢ + f × cosa¢ заменим на весьма
близкое, но более простое выражение
sin(a¢ + j) (погрешность 1%).
Тогда
N × l = Q[R × sinj + r + e × sin(a¢ + j)].
Принимая во внимание, что радиус
эксцентрика R = e + r + D, запишем
N × l = [1 + sin(a¢ + j)] × e × Q.
Полученная приближенная формула
позволяет определить значение момен!
та силы с точностью до 10%, что вполне
допустимо.
Рис. 2.5
Для полусухих поверхностей можно
Эксцентриковый прихват
принимать j = 8°, тогда коэффициент
трения покоя f¢ = 0,12–0,15. Для цапфы f¢ = r/r.
Пример конструкции эксцентрикового зажимного механизма приведен на
рисунке 2.5.
2.3. КЛИНОВЫЕ ЗАЖИМЫ
Клиновые зажимные устройства находят в станочных приспо!
соблениях широкое применение. Основными элементами их являются одно!,
двух! и трехскосые клинья. Использование таких элементов обусловлено про!
стотой и компактностью конструкции, быстротой действия и надежностью в
работе. Обычно используют самотормозящиеся клинья с углом a < 12°.
Механизмы с односкосым клином (рис. 2.6а). Усилие закрепления:
Q = W/tg(a + j),
где W — усилие привода; j — угол трения на опорной поверхности клина; при
a = 10° передаточное отношение i = 2,5.
Клиновой механизм с роликом на опоре (рис. 2.6б). Усилие закрепления:
Q = W/[tg(a + j) + tgj1пр],
где tgj1пр — приведенный угол трения качения; tgj1пр = d/D × tgj1.
Клиновой механизм с роликом на наклонной поверхности (рис. 2.6в). Уси!
лие закрепления:
Q = W/[tg(a + jпр) + tgj1].
Клиновой механизм с двумя роликами (рис. 2.6г). Усилие закрепления
при a = 10°, i = 3,6:
Q = W/[tg(a + jпр) + tgj1пр].
Клиновой механизм с двухскосым клином (рис. 2.6д). Усилие закреп!
ления:
Q = W/[tg(a1 + j1) + tg(a2 + j2)].
Если a1 = a2, j1 = j2, тогда Q = W/2 × tg(a + j).
54
Powered by TCPDF (www.tcpdf.org)
Глава 2
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 2.6
Схемы конструкций клиновых механизмов
Клиноплунжерный механизм двухопорный (рис. 2.6е). Этот механизм пред
ставляет собой двузвенный механизм, состоящий из клина и одного, двух или
нескольких плунжеров. Под действием силы W не перекашивается, а прижи
мается к одной стороне направляющей, при этом возникает дополнительная
сила трения F = W × tgj3.
Усилие закрепления для него:
Q6W5
1 1 tg(2 3 4) 5 tg 4
.
tg(2 3 4) 3 tg 4
2.4. РЫЧАЖНЫЕ ЗАЖИМНЫЕ УСТРОЙСТВА
(ПРИХВАТЫ)
В зажимных устройст
вах станочных приспособлений широ
кое распространение получили прихва
ты. Они представляют собой одно или
двуплечные рычаги, приводящиеся в
действие силой P, которая создается руч
ным или механизированным приводом.
Рассмотрим несколько схем прихватов,
представленных на рисунке 2.7.
Схема 1 (рис. 2.7а). Наименее эф
фективная, так как при такой схеме
сила закрепления заготовки Q всегда
меньше приложенной силы P:
Q2
P 1 l1
.
l2 3 l1
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
Рис. 2.7
Схемы прихватов
55
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Схема 2 (рис. 2.7б). Более эффективная, так как по этой схеме сила закреп
ления заготовки Q не только может быть равна приложенной силе P, но может
быть и больше этой силы:
Q2
P 1 l1
.
l2
Схема 3 (рис. 2.7в). Наиболее эффективная. Сила P всегда меньше силы Q.
Прихват, выполненный по этой схеме, можно сделать откидным, тогда будет
обеспечен свободный доступ к обрабатываемой заготовке:
Q3
P 1 (l1 2 l2 )
.
l1
Рассмотренные прихваты можно объединить (сблокировать) для того, что
бы, прикладывая силу P в одном месте, обеспечить закрепление заготовки (или
группы заготовок) в нескольких местах без увеличения силы привода. Некото
рые конструкции прихватов показаны на рисунке 2.8.
Рис. 2.8
Примеры конструкций прихватов
2.5. РЫЧАЖНОШАРНИРНЫЕ УСИЛИТЕЛИ
Данные механизмы применяются в качестве усилителей при
водов. Они делятся на однорычажные, двухрычажные одностороннего дейст
вия и двухрычажные двустороннего действия.
В отличие от клиноплунжерных и клиновых механизмов рычажношар
нирные усилители не обладают свойствами самоторможения и поэтому требу
ют постоянного подпора со стороны привода.
Двухрычажный механизм односто
роннего действия (рис. 2.9). Преимуще
ство — выигрыш в запасе хода. Недо
статок — усилие раскладывается на два
рычага.
Сила на рычаге
P = 0,5W/tg(a + b),
где b — угол трения, учитывающий тре
ние в шарнирах.
Запас хода
Рис. 2.9
Схема двухрычажного механизма
одностороннего действия
56
Powered by TCPDF (www.tcpdf.org)
Sp = 2L(1 – cosa).
Глава 2
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Двухрычажный шарнирный меха
низм двустороннего действия (рис. 2.10).
Сила на рычаге (на каждую сторону)
P = 0,5W/tg(a + b).
Запас хода (на каждую сторону)
Sp = L(1 – cosa).
Рис. 2.10
Схема двухрычажного механизма
двухстороннего действия
2.6. СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ
И ИСХОДНОГО УРАВНЕНИЯ
ДЛЯ РАСЧЕТА ЗАЖИМНОГО УСИЛИЯ
Величину необходимого зажимного усилия определяют на осно
ве решения задачи статики, рассматривая равновесие заготовки под действием
приложенных к ней сил. Для этого необходимо составить расчетную схему,
т. е. изобразить на схеме установки заготовки все силы, действующие на заго
товку, силы и моменты резания, зажимные усилия, реакции опор и силы тре
ния в местах контакта заготовки с установочными и зажимными элементами
приспособления. Расчетную схему следует составлять для наиболее неблагопри
ятного варианта местоположения режущего инструмента, когда для удержа
ния заготовки требуется приложить наибольшее зажимное усилие. В зависи
мости от принятой схемы базирования и закрепления обрабатываемой заготов
ки определяют ее возможное (или возможные) перемещение (или перемещения)
под действием сил резания и на основании этого записывают соответствующее
уравнение (или уравнения) ∑ P = 0. Если силы резания стремятся сдвинуть
установленную заготовку, то необходимое усилие зажима Q будет определять
ся из уравнений проекций всех сил на направление перемещения. Если же
силы резания стремятся повернуть или опрокинуть заготовку, то необходимое
усилие зажима Q будет определяться из уравнений моментов.
В тех случаях, когда силы резания могут сдвинуть и повернуть заготовку,
установленную в приспособлении, необходимо рассчитать силы крепления Q,
препятствующие сдвигу и повороту, и принять наибольшую из них.
Если применяется полная схема базирования заготовки с лишением ее всех
шести степеней свободы, то для составления расчетного уравнения на устано
вочные элементы типа пальцев не следует обращать внимание, так как реак
ция пальцев под действием резания должна быть равна нулю, т. е. пальцы пре
пятствуют смещению или повороту заготовки.
В левой части уравнения величину силы резания, стремящейся сдвинуть, оп
рокинуть или повернуть обрабатываемую заготовку, умножают на коэффициент
запаса K, а в правой части помещают противодействующие силы (моменты сил
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
57
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
зажима, силы трения и т. п.). Выбрав величину коэффициентов трения f и ко
эффициента запаса K для конкретных условий установки и обработки заготов
ки, решают уравнение (уравнения) равновесия, определяя величину потребно
го зажимного усилия Q.
Пример. Определить зажимную силу Q и диаметр пневмоцилиндра для за
крепления заготовки при фрезеровании (рис. 2.11).
Исходные данные: Pz = 5×103 Н; Py =
= 2×103 Н; длина заготовки l = 250 мм;
h1 = 60 мм, h2 = 30 мм (h1 и h2 — расстоя
ние от точки опоры до места приложе
ния сил).
Пренебрегая трением в опорах и ве
сом заготовки, можно записать уравне
ние равновесия как сумму моментов от
носительно точки 0:
1/ K (Q 1 h1 2 f 1 Q 1 l) 3 Pz 1 h2 3 Py 1 l 4 0,
откуда
Q = K × (Pz × h2 + Py × l)/(h1 + f × l).
Рис. 2.11
Схема для определения зажимного
усилия
Принимая коэффициент трения меж
ду заготовкой и штоком пневмоцилинд
ра f = 0,16, коэффициент запаса K для
данных условий обработки (черновое фре
зерование) будет следующим:
K = 1,5 × 1,2 × 1,2 × 1 × 1 × 1 × 1 = 2,16.
Тогда
Q3
2,16 1 (5 1 103 1 30 2 2 1 103 1 250)
4 14 1 103 Н.
60 2 0,16 1 250
Приняв давление сжатого воздуха p = 390 кПа и КПД пневмоцилиндра
h = 0,95, получим диаметр поршня
D=
Q
14 ⋅ 103
=
≅ 0,219.
0,785 ⋅ p ⋅ η
0,785 ⋅ 390 ⋅ 103 ⋅ 0,95
Принимаем по ГОСТ 1560870 ближайшее большее значение D = 250 мм.
2.7. УСТАНОВОЧНОЗАЖИМНЫЕ
МЕХАНИЗМЫ ПРИСПОСОБЛЕНИЙ
Рассмотренные установочные и зажимные элементы обеспе
чивают правильную установку обрабатываемой заготовки и надежное ее закре
пление, но при их применении требуется время отдельно на установку заготов
ки и отдельно на закрепление. В целях повышения производительности труда
58
Powered by TCPDF (www.tcpdf.org)
Глава 2
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
применяются различные устройства, выполняющие одновременно установоч
ные и зажимные функции. Поэтому установочные элементы в механизме долж
ны быть подвижными в направлении зажима, а для сохранения установочных
свойств закон их относительного движения должен быть задан и реализован в
конструкции приспособления с достаточной точностью. Такие устройства на
зывают установочнозажимными или самоцентрирующими механизмами.
Установочнозажимные механизмы могут быть ориентирующими (опреде
ляющими одну плоскость симметрии заготовки) и самоцентрирующими (опре
деляющими две взаимно перпендикулярные плоскости).
При проектировании и изготовлении ориентирующего приспособления по
ложение плоскости симметрии точно выдерживается относительно какойлибо
поверхности корпуса приспособления, а при установке заготовки в приспособ
лении добивается совмещения с нею координатной плоскости технологической
базы заготовки.
Принцип действия ориентирующего механизма поясняет рисунок 2.12. Два
подвижных элемента 1 и 2 перемещаются в направлении оси х. На их движе
ние накладываются три условия:
а) разнонаправленность;
б) одновременность;
в) равная скорость.
Самоцентрирующие механизмы применяют в тех случаях, когда требуется
обеспечить высокую точность размеров, заданных на детали относительно тех
нологической базы. Кроме более высокой соосности, применение самоцентри
Рис. 2.12
Принципиальная схема ориентирующих механизмов
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
59
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 2.13
Схема самоцентрирующего механизма
рующего механизма обеспечивает равно
мерную глубину резания, в результате чего
сокращается необходимый минимальный
припуск на обработку (рис. 2.13).
Применение самоцентрирующих меха
низмов позволяет также выдерживать при
обработке размеры, заданные не только от
оси технологической базы, но и от геомет
рической оси детали.
Погрешности установки заготовки в са
моцентрирующем приспособлении называ
ют погрешностью центрирования, так как
она проявляется в виде несовпадения осей
обработанной и базовой поверхностей. Воз
никает она в результате неточности изго
товления и износа деталей механизмов при
способлений.
2.7.1. КЛАССИФИКАЦИЯ
САМОЦЕНТРИРУЩИХ МЕХАНИЗМОВ
Самоцентрирущие механизмы различаются между собой формой рабочей по
верхности подвижных элементов и конструкцией механизма, обеспечивающего
их взаимосвязанное движение. По первому признаку различают призмати
ческие и кулачковые механизмы. По второму признаку — винтовые, реечно
зубчатые, спиральнореечные, клиновые (клиноплунжерные и клиношарико
вые), с упругодеформируемыми элементами (цанговые, мембранные, гидро
пластиковые). Границы применимости различных по конструкции механизмов
определяются двумя их характеристиками — величиной, присущей им погреш
ности центрирования и величиной создаваемой силы зажима.
ВИНТОВОЙ САМОЦЕНТРИРУЮЩИЙСЯ МЕХАНИЗМ
Имеет большую погрешность центрирования (0,3–0,5 мм), но с его помо
щью можно создавать большую силу зажима, легко компонуется с механизи
рованным приводом. Широко применяется на черновых и получистовых опе
рациях.
РЕЕЧНОЗУБЧАТЫЙ МЕХАНИЗМ
Используют в тисках вместо винтовых для обеспечения встречного переме
щения призм. Такой механизм в силовой цепи обладает передаточным отноше
нием i = 1, т. е. сила со штока привода без изменений (кроме потерь на трение)
передается на заготовку. Эти тиски используют на операциях, не требующих
сил зажима, превосходящих силу на штоке привода. Погрешность центрирова
ния этих механизмов сопоставима с погрешностью винтовых механизмов (0,3–
0,5 мм).
СПИРАЛЬНОРЕЕЧНЫЕ МЕХАНИЗМЫ
Используют для перемещения кулачков в токарных патронах. Конструк
ция таких патронов стандартизирована ГОСТ 267581.
60
Powered by TCPDF (www.tcpdf.org)
Глава 2
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
КЛИНОПЛУНЖЕРНЫЕ МЕХАНИЗМЫ
Часто используют в патронах для токарной обработки, для центрирования
как по внутренней, так и по наружной цилиндрической поверхности. Погреш1
ность центрирования в клиноплунжерных механизмах составляет 0,2–0,5 мм.
Поэтому патроны с такими механизмами обычно применяют для установки по
черновым базам на черновых операциях. Конструкция патронов стандартизи1
рована ГОСТ 16886181.
КЛИНОШАРИКОВЫЕ МЕХАНИЗМЫ
Применяют в приспособлениях токарных и шлифовальных станков при
базировании по внутренней и наружной цилиндрической поверхности. Досто1
инством такого метода по сравнению с клиноплунжерным является уменьше1
ние потерь на трение в направляющих плунжера1шарика и повышение точно1
сти центрирования за счет уменьшения числа кинематических звеньев (шари1
ки вместо центрального клина и плунжеров) и повышении их точности при
изготовлении. Такие механизмы применяют на операциях с небольшими сила1
ми резания. Широкое распространение шариковые патроны получили на опе1
рациях окончательного шлифования базовых отверстий зубчатых колес.
МЕХАНИЗМЫ
С УПРУГОДЕФОРМИРУЕМЫМИ ЭЛЕМЕНТАМИ
Самоцентрирующие механизмы имеют значительную погрешность центри1
рования, вызванную большим числом сопряжений деталей, обеспечивающих
встречное перемещение установочных элементов. Наибольшую точность цент1
рирования дают механизмы, установочные элементы которых объединены в
одну деталь и перемещаются в пределах ее упругой деформации.
ЦАНГИ
Цангами называются разрезные пружинные втулки, которые могут цент1
рировать заготовки по внешней и внутренней поверхностям. Цанговые меха1
низмы используют для центрирования и зажима пруткового материала разно1
го профиля и отдельных заготовок.
Продольные прорези превращают каждый лепесток цанги в консольно за1
крепленную балку, которая получает радиальные упругие перемещения при
продольном движении цанги за счет взаимодействия корпусов цанги и корпуса
приспособления. Число лепестков цанги зависит от ее рабочего диаметра D и
профиля зажимных заготовок. При D < 30 мм цанга имеет три лепестка, при
30 < D < 80 мм — четыре, при D > 80 мм — шесть лепестков.
Для сохранения работоспособности цанги деформация ее лепестков не долж1
на выходить за пределы упругой зоны. Это определяет повышенные требова1
ния к точности базового диаметра заготовок, который должен быть выполнен
не грубее 91го квалитета. Погрешность центрирования, обусловленная неточ1
ностью изготовления цанговых патронов, не превышает 0,05–0,1 мм (рис. 2.14).
Продольные прорези превращают каждый лепесток цанги в консольно закреп1
ленную балку, которая получает радиальные упругие перемещения при про1
дольном перемещении цанги за счет взаимодействия конусов цанги и корпуса.
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
61
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 2.14
Схема работы лепестков цанги
Так как радиальные перемещения всех лепестков цанги происходит одновре
менно и с одинаковой скоростью, то механизм приобретает свойство самоцент
рирования.
Для определения силы Q, затрачиваемой на деформацию лепестка, рассмот
рим лепесток цанги как консольно закрепленную балку с вылетом l:
У = Q × l3/3 × E × y,
где l — длина лепестка цанги от места заделки ло середины конуса, мм; y —
стрела прогиба лепестка, т. е. радиальный зазор между цангой и заготовкой.
Тогда для всех лепестков цанги
Q = 3 × E × g × y × n/l3,
где E — модуль упругости материала цанги, МПа; n — число лепестков цанги;
g — момент инерции сектора сечения цанги в месте заделки лепестка цанги:
56
D3 1 h 3
2 1 sin 22 4
2 7 sin 21 1 cos 21 8
,
9
8
21
где D — наружный диаметр поверхности лепестка, мм; h — толщина лепестка,
мм; a1 — половина угла сектора лепестка цанги, рад.
Сила тяги цанги будет равна
31 E1 2
3
4
W 5 9Q 6
1 y 1 n [tg(7 6 81 ) 6 tg 82 ].
l3
Цанги изготавливаются из сталей У8А или 65Г, крупные цанги — из стали
15ХА или 12ХН3А. Рабочую часть цанги закаливают до твердости HRC 48–52.
Хвостовую часть подвергают отпуску до твердости HRC 30–35.
МЕМБРАННЫЕ МЕХАНИЗМЫ
Мембранные механизмы применяют для центрирования по наружной и
внутренней цилиндрической поверхности деталей типа дисков, колец, втулок
и т. д. Основной деталью такого механизма является мембрана. Применяют
мембраны трех основных видов: рожковые, чашечные и кольцевые. Наиболее
точными являются рожковые и чашечные. Конструкция и основные параметры
мембранных патронов приведены в ГОСТ 2127785, 2127885 и 217985. Ча
шечные и кольцевые мембраны (тарельчатые пружины) нормализованы.
62
Powered by TCPDF (www.tcpdf.org)
Глава 2
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
На рисунке 2.15 обрабатываемая заготовка зажимается внутренними сила
ми упругости мембраны посредством ее кулачков с силой Q. Сила тяги W разво
дит кулачки при откреплении заготовки.
Патроны с рожковыми и чашечными мембранами обеспечивают точность
центрирования до 0,003–0,005 мм. Кольцевые мембраны применяются в слу
чаях, когда при значительных нагрузках они должны иметь малые габаритные
размеры. Эти мембраны обычно применяют в виде пакетов. Точность базовых
поверхностей должна выдерживаться в пределах 7–11го квалитетов. Тогда
точность центрирования будет в пределах 0,01–0,03 мм.
На рисунке 2.16 показана схема механизма с двумя пакетами мембран. На
корпус надеты два пакета мембран, между которыми расположена втулка. Если
стержень под действием силы W будет перемещаться влево, то пакеты сплющи
ваются, увеличиваются. Диаметры колец могут увеличиваться на 0,15–0,4 мм в
зависимости от их размера.
Чашечные, рожковые и кольцевые мембраны изготавливают из сталей 65Г,
У10А, 30ХГС и подвергают термообработке до твердости HRC 40–48.
Рис. 2.15
Схема патрона с чашечной мембраной
Рис. 2.16
Схема патрона с кольцевыми мембранами
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
63
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ГИДРОПЛАСТНЫЕ МЕХАНИЗМЫ
Широкое распространение получили упругие патроны с использованием
гидропластмассы. Основные части таких патронов — корпус, тонкостенная
втулка и кольцевая замкнутая полость между втулкой и корпусом, заполнен/
ная гидропластмассой. На гидропластмассу действует давление P, которое де/
формирует тонкостенную часть втулки и она центрирует и зажимает заготовку
(рис. 2.17). Для надежного закрепления заготовки гидропластмасса должна
быть сжата до определенного давления.
Сжатие обеспечивается плунжером от
винта, пневмоцилиндра или другого си/
лового механизма. Тонкостенные втул/
ки изготавливаются из сталей У7А или
30ХГС с последующей термообработкой
до твердости HRC 35–40.
Такие патроны применяют для цент/
рирования заготовок как по наружному,
так и по внутреннему диаметру. Точность
базовых поверхностей закрепляемых за/
готовок должна быть не ниже 7–9/го ква/
литетов. Погрешность центрирования —
0,01 мм.
Точный расчет оправок с гидропла/
стмассой как упругой оболочки, нагру/
Рис. 2.17
женной давлением P, очень сложен. Име/
Схема патрона с использованием
гидропластмассы
ются формулы и таблицы для ориенти/
ровочного расчета и подбора оправок.
В приспособлениях с гидропластмассой применяются различные ее марки.
Основные компоненты этих марок приведены в таблице 2.1.
Полихлорвиниловая смола является основой гидропластмассы. Она прида/
ет массе механическую прочность и нетекучесть. В то же время благодаря на/
личию смолы гидропласт мягок, хорошо передает давление, не прилипает к
стенкам, не изменяется с течением времени.
Дибутилфталат — бесцветная, нелетучая, маслянистая жидкость, исполь/
зуется в качестве пластификатора. Этот пластификатор дает в композиции наи/
более мягкие массы.
1 2 3 4 5 6 2 7 89 7
12342565789
24739 5893 2999
12342565789
24739
9
9
1234532674843279
239 964 1234532674843279
239 964 1
443939 39 44926
!
"#969 93$%4 9434&926
!
'9 82# 9 32
64
Powered by TCPDF (www.tcpdf.org)
9
9
Глава 2
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Стеарат кальция — применяется в качестве стабилизатора и представляет
собой нерастворимое в воде кальциевое мыло.
Температура плавления гидропластмассы СМ — 140–150°С, пластмассы
ДМ — 120–130°С, МАТИ$1$4 — 150–160°С. Перед заливкой расплавленной мас$
сы в приспособление последнее прогревают до температуры 100–120°С, что не$
обходимо для сохранения лучшей текучести масс в процессе заливки.
Гидропластмассы марки СМ имеют вид слегка прозрачной коричневой мас$
сы, напоминающей резину. Обладает более высокой твердостью и вязкостью по
сравнению с пластмассой ДМ и применяется для заполнения полостей центри$
рующих приспособлений (патроны, оправки). Для этих же приспособлений ис$
пользуется и гидропластмасса МАТИ$1$4.
Гидропластмасса марки ДМ представляет собой студнеобразную массу свет$
ло$коричневого цвета. Она менее тверда и обладает меньшей вязкостью. При$
меняется для заполнения каналов многоплунжерных механизмов.
Зажимные механизмы приспособлений
Powered by TCPDF (www.tcpdf.org)
65
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
СИЛОВЫЕ ПРИВОДЫ
ПРИСПОСОБЛЕНИЙ
Основным назначением силового привода в приспособлении
является создание исходной силы тяги W, необходимой для зажима заготовки
силой Q. Кроме этого, силовые приводы используют для механизации и авто!
матизации приемов загрузки и выгрузки заготовок, поворота приспособления,
удаления стружки, транспортирования заготовок и др. Силовой агрегат привода
представляет собой преобразователь какого!либо вида энергии в механическую,
необходимую для работы зажимных механизмов. В связи с этим приводы обычно
классифицируют по виду преобразуемой энергии. В приспособлениях исполь!
зуют следующие приводы: пневматические, гидравлические, электрические,
электромагнитные, магнитные, вакуумные, центробежно!инерционные, от сил
резания (энергия привода главного движения станка), от движущихся частей
станка.
По степени автоматизации различают механизированные и автоматизиро!
ванные приводы. Отличительной особенностью автоматизированного привода
является освобождение рабочего от приемов по управлению им.
3.1. ВЫБОР ЗАЖИМНОГО УСТРОЙСТВА
После определения величины зажимного усилия Q конструк!
тор выбирает тип зажимного устройства (ЗУ). Исходными данными для выбора
служат величина зажимного усилия Q, тип производства (единичное, мелкосе!
рийное, серийное), размер и конфигурация заготовки, а также характер выпол!
няемой операции. Конструкции зажимных устройств приспособлений можно
условно разделить на три группы. К первой группе относятся пневматические,
гидравлические, пневмогидравлические и электрические приводы, ко второй —
механические и механогидравлические приводы, к третьей — магнитные, элек!
тромагнитные и вакуумные приводы. Выбор типа ЗУ рекомендуется произво!
дить с учетом следующих общих соображений. При больших усилиях следует
выбирать ЗУ первой (рис. 3.1а) или второй группы (рис. 3.1б). Однако при этом
нужно иметь в виду, что ЗУ второй группы — ручные — экономически нецеле!
66
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 3.1
Зажимные устройства приспособлений
сообразно применять в условиях серийного и мелкосерийного многономенкла
турного производства изза больших затрат вспомогательного времени, кото
рое требуется на закрепление и открепление заготовки с помощью этих уст
ройств. Не следует использовать ручные устройства с эксцентриковыми меха
низмами в приспособлениях, предназначенных для таких станков, на которых
приспособление с заготовкой вращается (токарные, револьверные и т. п.), так
как под действием инерционных сил, приложенных к рукоятке эксцентрика,
ЗУ может раскрепиться.
В условиях серийного производства следует применять ЗУ первой группы
(рис. 3.1а) с быстродействующими приводами. При малых усилиях Q и в осо
бенности для закрепления нежестких тонкостенных заготовок с хорошо обра
ботанной плоской установочной базой поверхностью целесообразно применять
ЗУ третьей группы (рис. 3.1в). В силу их универсальности они могут приме
няться при любом типе производства.
3.1.1. ВЫБОР ТИПА СИЛОВОГО МЕХАНИЗМА
И ОПРЕДЕЛЕНИЕ НЕОБХОДИМОГО
ИСХОДНОГО УСИЛИЯ ЗАКРЕПЛЕНИЯ
Силовые механизмы используются в приспособлениях с ЗУ первой и второй
группы (рис. 3.1).
РАСЧЕТ ЗАЖИМНЫХ УСТРОЙСТВ ПЕРВОЙ ГРУППЫ
Исходя из необходимого усилия Q и условий выполнения операции, выби
рается тип силового механизма (СМ) и тип привода (П). Основной характери
стикой СМ является коэффициент усиления i = Q/W. Выбирая СМ, следует
иметь в виду, что с увеличением i уменьшаются габариты привода, что при
прочих равных условиях является большим преимуществом. С другой сторо
ны, гидравлические приводы по сравнению с пневматическими при равных
исходных усилиях W обладают значительно меньшими габаритами. Это позво
ляет в необходимых случаях, увеличив W гидравлического привода, использо
вать СМ с меньшим коэффициентом усиления i, но обладающий простой конст
рукцией и большим КПД. Однако применение гидропривода ограничивается
сложностью его гидравлической системы (насос, бак, аппаратура и т. п.). Его
целесообразно использовать лишь на гидрофицированных станках или при на
личии на участке гидросистемы для обслуживания группы станков.
В ряде случаев применяют гидропривод, приводимый в действие от пневмо
гидроусилителя, что позволяет использовать, с одной стороны, преимущества
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
67
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
гидропривода для снижения габаритов приспособления, а с другой — положи
тельные свойства сжатого воздуха как энергоносителя, подведенного в настоя
щее время практически к каждому станку. По величине Q, пользуясь кинема
тикой СМ или табличными данными для усиления i, определяют исходное уси
лие i, по которому выбирают и рассчитывают габариты привода.
РАСЧЕТ ЗАЖИМНЫХ УСТРОЙСТВ ВТОРОЙ ГРУППЫ
По зажимному усилию выбирают СМ, имея в виду, что рабочий может при
ложить лишь вполне определенное усилие W. При расчетах принимают W £
£ 100 Н, если оно прилагается к рукоятке, гаечному ключу и т. п. Если же уси
лие прилагается к «звездочке», «барашку» и т. п., принимают W £ 30 Н. Кон
структор должен выбирать СМ с таким коэффициентом усиления i, чтобы при
принятом способе приведения в действие ЗУ последнее обеспечивало создание
потребного зажимного усилия Q.
Выбор конструктивной схемы СМ производится не только исходя из обес
печения необходимого коэффициента усиления i, но и с учетом конкретных
условий компоновки приспособления. Выбор конструктивной схемы облегча
ется тем, что в настоящее время отработано и опробовано на практике большое
количество конструкций силовых механизмов. Эти конструкции приводятся в
справочниках и в литературе по приспособлениям. Многие из них нормализо
ваны и включены в отраслевые нормали. Поэтому конструктор имеет возмож
ность из числа имеющихся выбрать конструктивную схему, которая наиболее
полно удовлетворяет конкретным условиям проектируемого приспособления.
Для выбранного СМ необходимо определить коэффициент усиления i и уси
лие W, последнее должно быть приложено к СМ приводом или рабочим. Рас
четная формула для определения необходимого усилия W может быть получе
на на основе решения задачи статики — последовательного рассмотрения рав
новесия звеньев СМ. Определив усилие W, рассчитывают размер привода
(диаметр цилиндра, диафрагмы), мощность электродвигателя или усилие на
рукоятке для механических приводов приспособлений.
РАСЧЕТ ЗАЖИМНЫХ УСТРОЙСТВ ТРЕТЬЕЙ ГРУППЫ
По зажимному усилию Q и площади заготовки, на которой распределяется
удельное усилие q, определяют требующееся усилие W, по которому рассчиты
вают необходимый вакуум для вакуумных устройств или силовой магнитный
поток для магнитных устройств. Зная усилия, действующие на отдельные
звенья ЗУ приспособления, и допустимые напряжения, можно рассчитать все
элементы приспособления на прочность.
3.2. ПНЕВМАТИЧЕСКИЙ ПРИВОД
Сжатый воздух (пневматика) наиболее широко используется в
современном производстве. Пневматические устройства отличаются быстро
той действия, относительной простотой конструкции, легкостью и простотой
управления, надежностью и стабильностью в работе.
По быстроте действия пневмоприводы значительно превосходят многие ме
ханизированные приводы. Если, например, скорость течения масла, находя
68
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
щегося под давлением в трубопроводе гидравлического устройства, составляет
от 2 до 9 м/с, то воздух, находясь под давлением 4–5 атм, распространяется по
трубопроводам со скоростью до 180 м/с. Поэтому в течение 1 ч возможно осу!
ществить до 2500 срабатываний пневмопривода.
Вместе с тем пневмопривод имеет недостатки — неплавное перемещение
штока, большие габаритные размеры силовых агрегатов и низкое давление воз!
духа, шум при выпуске отработанного воздуха.
Поршневые пневмодвигатели подразделяются на:
а) стационарные (ГОСТ 15608!80) — применяются на фрезерных, сверлиль!
ных и др. подобных операциях;
б) вращающиеся (ГОСТ 16683!81) — применяются на токарных операциях.
Пневмопривод включает в себя следующие части: источник сжатого возду!
ха — обычно цеховая или заводская компрессорная установка; силовой агре!
гат — пневмодвигатель, преобразующий энергию сжатого воздуха в силу на
штоке; пневмоаппаратура — контролирующие приборы, распределительные
устройства, воздуховоды и т. д.
В одну конструкцию с приспособлением скомпонован пневмодвигатель.
Остальные устройства размещаются вне приспособления, с помощью воздухо!
проводов их соединяют с приспособлением.
Пневмодвигатели бывают трех типов:
а) поршневые (пневмоцилиндры);
б) диафрагменные (пневмокамеры);
в) сильфонные.
Конструкция типового пневмопривода приведена на рисунке 3.2.
По источнику энергии обратного хода различают приводы:
а) одностороннего действия, в которых рабочий ход производится сжатым
воздухом, а холостой — усилием пружины (рис. 3.3а);
б) двустороннего действия.
Рис. 3.2
Типовая конструкция пневмоцилиндра
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
69
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 3.3
Пневмодвигатели поршневые:
а — пневмоцилиндр одностороннего действия; б — пневмоцилиндр двустороннего действия одинар!
ный; в — пневмоцилиндр двустороннего действия сдвоенный.
Приводы одностороннего действия применяют в случаях:
· когда не требуется большой ход штока;
· когда на обратном ходе не требуется большой силы для отвода зажимных
элементов в исходное положение.
При выборе пневматического привода необходимо установить его разно!
видность. Для обеспечения большего хода поршня следует применять пневмо!
цилиндр, а при малом ходе — пневмокамеру.
Когда в приспособлении имеется самотормозящий зажимной механизм,
рекомендуется выбирать пневмо! или гидроприводы двустороннего действия, в
противном случае — одностороннего действия.
Поршневые двигатели — пневмоцилиндры, подразделяются на одинарные
и сдвоенные. Одинарные (рис. 3.3б) имеют один поршень, а сдвоенные — два
(рис. 3.3в). Развиваемое поршневым двигателем усилие W сохраняется посто!
янным на всей длине хода.
Диафрагменные пневмокамеры (рис. 3.4) в силовом отношении отличают!
ся от поршневых двигателей тем, что развиваемое ими усилие W изменяется по
мере движения штока. Чтобы избежать резкого изменения величины усилия W
при удалении штока от исходного положения, выбирают рациональную длину
его хода.
Преимущества поршневых двигателей:
1) универсальность длины хода;
2) усилие по длине хода постоянно.
Их недостатки:
1) большие потери на трение;
2) большой расход сжатого воздуха;
3) уплотнения допускают до 10 тыс. включений.
Рис. 3.4
Двигатели пневмокамерные диафрагменные:
а — одностороннего действия с тарельчатой диафрагмой; б — одностороннего действия с плоской
диафрагмой; в — двустороннего действия с тарельчатой диафрагмой; г — двустороннего действия с
плоской диафрагмой.
70
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Преимущества пневмокамер:
1) у пневмокамер одностороннего действия отсутствуют утечки воздуха. У ка
мер двустороннего действия требуется уплотнение штоковой полости;
2) простота в изготовлении и относительно небольшая себестоимость;
3) пневмокамеры (диафрагмы) долговечны. Допускают до 600 тыс. сраба
тываний.
Недостатки пневмокамер:
1) небольшой ход штока, порядка 10–40 мм;
2) усилие по длине хода штока непостоянно.
Не увеличивая диаметра пневмокамеры можно увеличить усилие на што
ке, но при этом резко уменьшается ход поршня.
На практике принимают отношение d/D = 0,6–0,8. При таком отношении
длина хода штока l = (0,2–0,22) × D. Для тарельчатых диафрагм l = (0,15–0,18) × D.
Силу на штоке цилиндра одностороннего действия рассчитывают по фор
муле
W = p ⋅ π ⋅ D2 /4 ⋅ η − q,
где p — давление воздуха в сети (обычное давление воздуха в сети p = 390 кПа);
D — диаметр поршня, м; h — КПД цилиндра (h = 0,97–0,98); q — сила сопро
тивления предельно сжатой пружины обратного хода, Н.
Для пневматических приводов двустороннего действия усилие, развивае
мое приводом при поступлении сжатого воздуха в бесштоковую полость,
W 1 p 2 3 2 D2 /4 2 4,
или упрощенно, принимая p/4 = 0,785,
W = 0,785 × p × D2 × h.
Усилие, развиваемое приводом при поступлении сжатого воздуха в штоко
вую полость,
W = 0,785 × p × (D2 – d2) × h,
где d — диаметр штока, м.
Для обратной задачи, когда известно усилие, которое необходимо развить
приводу для закрепления заготовки, и требуется найти D и d, задается отноше
ние d/D = 1/3–1/5.
В результате расчета определяют D и d, их значения выбираются ближайши
ми из ряда чисел. Нормальные диаметры пневмоцилиндров по ГОСТ 1560880
или ГОСТ 1668381 составляют ряд: 25, 50, 60, 75, 100, 125, 150, 200, 250, 300,
350 и 400 мм.
Силу на штоке пневмокамеры одностороннего действия определяют из вы
ражения
W 1 1/3 2 3 2 p 2 (R 2 4 R 2 R1 5 R12 ) 5 q,
где R — радиус диафрагмы пневмокамеры, м; R1 — радиус кольцевой площад
ки крепления штока, м.
Величина силы W зависит от положения диафрагм в камере, которое непре
рывно меняется за время рабочего хода штока. Изменение силы W объясняется
зависимостью величины q и упругого сопротивления материала мембраны от
хода штока. Поэтому при конструировании приспособлений с пневмокамерами
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
71
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
рабочий ход следует выбирать таким,
чтобы при закреплении заготовки диа
фрагма занимала примерно среднее по
ложение.
Нормальные диаметры для пневмо
камер выбираются из ряда: 125, 160,
200, 250, 320 и 400 мм.
Пневмокамеры могут быть так же,
как и пневмоцилиндры, односторонне
го и двустороннего действия.
Конструкция нормализованной пнев
мокамеры одностороннего действия при
ведена на рисунке 3.5.
По методу компоновки с приспособ
лением данные приводы могут быть:
1) прикрепляемые;
2) встроенные;
3) агрегатируемые.
Рис. 3.5
Прикрепляемые приводы — норма
Конструкция нормализованной пневмо
камеры одностороннего действия
лизованные агрегаты, которые прикреп
ляют к корпусу приспособления. При из
носе привода он может быть легко заменен новым. Если приспособление снима
ют с производства, то привод можно использовать для другого приспособления.
Встроенные пневмодвигатели отличаются тем, что полость под поршень
или диафрагму рассчитывают непосредственно в корпусе приспособления. Ис
пользуют стандартные поршни, штоки, уплотнения. Встроенные двигатели
являются специальными и повторного использования не допускают, но явля
ются более компактными.
Агрегатируемый пневмодвигатель представляет собой самостоятельный
механизм, закрепляемый на станке отдельно от приспособления. Часто в его
конструкцию входит рычажный усилитель. Таким пневмодвигателем можно
приводить в действие несколько последовательно устанавливаемых на станок
приспособлений для крепления различных заготовок.
3.2.1. МАТЕРИАЛЫ ДЛЯ ИЗГОТОВЛЕНИЯ
ДЕТАЛЕЙ ПНЕВМОДВИГАТЕЛЕЙ
Для цилиндров поршневых двигателей применяется серый чугун СЧ 20 или
СЧ 15, а также сталь 20, 45, 20Х, 40Х с последующей цементацией и закалкой
до твердости HRC 30–35 для сталей 20 и 45, и HRC 37–42 для сталей 20Х и 40Х.
В случае подготовления полости под поршень непосредственно в корпусе
приспособления в качестве цилиндра используется тонкостенные гильзы с хро
мированной поверхностью, Ra = 0,4–0,25 мкм. Точность изготовления зеркала
цилиндра принимается по посадке Н7/f7 для Vобразных манжет.
Цилиндры поршневых пневмоприводов изготавливают из алюминия АЛ9
и АЛ10.
Поршни и штоки изготавливают из стали 20 и 20Х с последующей цемента
цией и закалкой до HRC 25–40.
72
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Крышки пнвмоцилиндров изготавливают из стали 3 или 35. Причем, если
крышка устанавливается со стороны штока, то отверстие под шток выполняет
ся по посадке H7/h7 — для случая применения Vобразных манжет, H6/h6 —
в случае применения уплотнения в виде резиновых колец.
Отверстие в поршне под шток выполняется по H6/h6, причем посадочный
поясок в штоке, с помощью которого сопрягается шток с поршнем, выполняет
ся цилиндрическим с резьбовым концом, на котором имеется продольный паз
для установки стопорной шайбы с внутренним усиком.
Крышка и корпус диафрагм пневмокамеры изготавливают из серого чугуна
СЧ 20 или алюминиевых сплавов АЛ9 и АЛ10, если пневмокамера вращает
ся, а также из стали 3 или 35.
Шток обычно изготавливают из стали 20 или 20Х, шайбу из стали 3. Диа
фрагму изготавливают из прорезиненной ткани толщиной 6–8 мм или из мас
лостойкой резины толщиной 1–3 мм.
Уплотнения являются ответственными конструктивными элементами пнев
модвигателей. Они необходимы в кольцевых зазорах между поршнем и цилин
дром, штоком и крышкой и в неподвижных соединениях, где возможна утечка
воздуха.
В современных пневмодвигателях применяют две разновидности уплот
нений: Vобразного сечения из маслостойкой резины по ГОСТ 696984 для уп
лотнения поршней и штоков и кольца круглого сечения из маслостойкой рези
ны по ГОСТ 983383 для уплотнений поршней, штоков и неподвижных соеди
нений.
3.3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ
В гидроприводах исходной энергией является потенциальная
энергия (энергия давления) рабочих жидкостей (обычно масла). Гидропривод
состоит из масляной ванны, гидронасоса, управляющей аппаратуры (гидрорас
пределителя), силового агрегата поршневого типа (гидроцилиндр), контроль
норегулирующей аппаратуры (сюда относятся предохранительный и обрат
ный клапаны, гидроаккумуляторы, редукционные клапаны, дроссели, мано
метры и т. п.) и трубопроводов.
Конструкции гидроцилиндров и способы их компоновки с приспособлени
ем такие же, как и в пневмоприводе, и оговорены теми же стандартами.
По сравнению с пневмоприводом гидропривод имеет следующие преиму
щества:
1) резко уменьшаются габаритные размеры силовых агрегатов, а следова
тельно, и всего приспособления в связи с тем, что давление масла в 10–30 раз
выше воздуха. При этом сокращается расход металла, увеличивается жест
кость приспособления, что позволяет вести обработку на максимальных режи
мах резания;
2) большие силы со штока можно передавать непосредственно на заготовку
без применения зажимных механизмовусилителей. При этом повышается КПД
зажима, упрощается конструкция приспособления;
3) осуществление многократного зажима без механических усилителей пу
тем компоновки нужного числа цилиндров, управляемых одним золотником.
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
73
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Как правило, в этом случае конструкция приспособления получается более ком
пактной и дешевой;
4) компактность гидроцилиндров позволяет создавать удобные агрегатиро
ванные приводы для приспособлений серийного производства;
5) работают более плавно и бесшумно;
6) рабочая жидкость одновременно выполняет и функции смазки, предо
храняя движущиеся части от износа и коррозии;
7) компактность гидроприводов позволяет размещать их на подвижных ча
стях (плавающие цилиндры).
Вместе с тем, существенным недостатком гидропривода является его высо
кая первоначальная стоимость, а также повышенные требования к эксплуата
ции в целях предупреждения утечки масла. В связи с этим наиболее эффектив
но применение гидропривода в приспособлениях, предназначенных для гидро
фицированных станков, при подключении его к гидросистеме станка.
Если станок не гидрофицирован, то создание специального гидропривода
для приспособления, ввиду его высокой стоимости, эффективно только в усло
виях крупносерийного производства. Стремление использовать достоинства
гидропривода в приспособлениях для серийного производства привело к агре
гатированию гидроприводов, которые обслуживают несколько приспособлений,
что значительно сокращает эксплуатационные расходы, приходящиеся на каж
дое приспособление.
В станочных приспособлениях применяют нормализованные встраиваемые
цилиндры дву и одностороннего действия с внутренним диаметром цилиндров
40, 50, 60, 75 и 100 мм.
Исходные данные для расчета гидравлических зажимных устройств — не
обходимая сила на штоке W, ход поршня l и время его рабочего хода (время
зажатия заготовки) Т. Задаваясь давлением масла Р, можно определить пло
щадь поршня.
F1
W
,
P
а отсюда диаметр цилиндра
D2
4F
41W
2
(м).
3
3 14
На работоспособность гидропривода оказывает влияние качество масла,
например его вязкость. Обычно используют веретенное масло 2 или 3 и турбин
ное Л.
Питание гидросистемы осуществляется шестеренчатыми, лопастными или
плунжерными насосами. Лопастные насосы наиболее компактны, поэтому по
лучили широкое распространение.
Уплотнение поршней и штоков гидроцилиндров обычно достигается при
менением одногодвух колец круглого поперечного сечения из маслостойкой
резины (по ГОСТ 983383).
74
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
3.4. ПНЕВМОГИДРАВЛИЧЕСКИЕ
И МЕХАНОГИДРАВЛИЧЕСКИЕ ПРИВОДЫ
В пневмогидравлическом приводе исходной энергией являет
ся потенциальная энергия сжатого воздуха, которая преобразуется сначала в
энергию давления жидкости, а затем уже в силу на штоке. Создание гидро
пневмопривода представляет собой попытку использовать одновременно досто
инства пневмо и гидропривода (рис. 3.6).
Применяются для преобразования относительно низкого давления воздуха
(4–5 атм) в высокое давление масла (~ 50 атм) и для передачи последнего к ра
бочим гидроцилиндрам, производящим закрепление заготовок.
Пневмогидропривод состоит из силового гидравлического цилиндра и пнев
могидравлического усилителя давления. Усилители давления бывают двух ти
пов: прямого и последовательного действия.
Силу W на штоке гидроцилиндра рассчитывают следующим образом:
Сила W¢ на штоке пневмоцилиндра равна
W′ = p⋅
π ⋅ D12
⋅ η.
4
В цилиндре создается давлением жидкости
p′ =
D22
⋅ η,
d2
а на штоке гидроцилиндра развивается сила
π D2 ⋅ D2
W = p ⋅ ⋅ 1 2 2 ⋅ η1 ⋅ η2 ,
4
d
где p — давление воздуха в пневмосети; h1 и h2 — КПД соответственно пневмо
и гидроцилиндра:
h1 = 0,93–0,95; h2 = 0,8–0,95.
Существенным недостатком привода яв
ляется сравнительно большой ход пневмо
цилиндра, необходимый для получения от
носительно небольших перемещений штока
гидроцилиндра. Примерно, во сколько раз
выигрывает в силе, во столько раз проигры
вает в расстоянии. Как правило, пневмогид
роусилители применяются для закрепления
заготовок по обработанным поверхностям, в
том числе в цехах серийного производства
для закрепления крупногабаритных заго
товок. С помощью пневмогидроусилителей
можно закреплять одну заготовку в несколь
ких местах или несколько заготовок в одном
месте, т. е. возможно использовать ПМГуси
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
Рис. 3.6
Схема работы гидропневмопривода
75
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
лители в многоместных многопозиционных приспособлениях. Для устранения
недостатков ПМГпривода (большой ход ПМцилиндра и малое перемещение
Гцилиндра) в настоящее время разработан ряд конструкций, позволяющих
осуществлять предварительный быстрый подвод штока, а давление жидкости
увеличивать только в конце хода штока гидроцилиндра.
Кроме пневмогидроусилителей в цехах мелкосерийного многономенклатур
ного производства применяется и механогидравлические усилители. В таких
усилителях поршень перемещается вручную.
Механогидравлический привод состоит из рабочего гидравлического ци
линдра и механогидравлического усилителя давления, который, как и пневмогид
равлический, может быть прямого или последовательного действия (рис. 3.7).
При вращении винта плунжер перемещается и создает давление жидкости,
приводящее в действие рабочий цилиндр. В усилителях последовательного дей
ствия применяют два винта разного диаметра, расположенные телескопиче
ски. При вращении обоих винтов происходит подвод зажимного устройства к
заготовке, так как при этом создается низкое давление жидкости. Когда подвод
осуществлен, давление повышается, при этом автоматически срабатывает уст
ройство в усилителе и вращение винта большого диаметра выключается. При
вращении винта меньшего диаметра создается высокое давление жидкости,
используемое для зажима заготовки.
Данные приводы широко используются в приспособлениях для закрепле
ния заготовок при обработке их на станках с ЧПУ и ГПмодулях, имеющих
подвижные столы, а также для закрепления заготовок на паллетах, располо
женных вне зоны обработки, а затем передвигающихся в зону резания.
Расчет величины Pи, создаваемой гидроцилиндром одностороннего дейст
вия, можно произвести по формуле
Pи =
2
Pр ⋅ l
⎛ D ⎞ ⋅ η − q,
⎜
⎟
rср ⋅ tg(α + ϕ) ⎝ dп ⎠
(3.1)
где Pи — исходное усилие, развиваемое гидроцилиндром одностороннего дейст
вия, приводимого от механогидравлического усилителя, Н; Pр — усилие, при
лагаемое рабочим к рукоятке, Н; l — плечо, на котором прилагается усилие к
рукоятке, мм; rср — средний радиус резьбы винта усилителя, мм; a — угол
подъема резьбы винта усилителя, град
(2°30¢–3°30¢); j — угол трения в резьбо
вом соединении, град (» 6°34¢ — для мет
рической резьбы); D — диаметр поршня
рабочего гидроцилиндра, мм; dп — диа
метр плунжера усилителя, мм; h — КПД,
учитывающий потери в уплотнениях
(h » 0,9); q — сопротивление возвратной
пружины, Н.
Усилие Pи возрастает кратно отно
шению диаметров плунжера и поршня.
Преимуществом такого привода явля
Рис. 3.7
ется отсутствие внешнего стационарно
Схема механогидравлического привода
го источника питания.
с усилителем прямого действия
76
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Механогидравлические приводы могут быть составной частью приспособ
ления, встроенного в его корпус, или являться самостоятельным устройством,
питающим гидравлические цилиндры.
3.5. ВАКУУМНЫЙ ПРИВОД
Зажим заготовки в вакуумных зажимных устройствах осуще
ствляется под действием атмосферного давления. Их применяют для закрепле
ния заготовок из различных материалов с плоской базовой поверхностью на
чистовых операциях.
Заготовку устанавливают на приспособление, из полости откачивают воз
дух. Для уменьшения времени срабатывания объем этой полости должен быть
минимальным. Атмосферное давление прижимает заготовку к корпусу. Для
обеспечения герметичности в системе установлено уплотнение из резинового
шнура. При установке тонкостенной заготовки шлифованной базовой поверх
ностью допускается применение приспособлений без уплотнений. В этом слу
чае на установочной плоскости делается ряд мелких, тесно расположенных
отверстий, через которые отсасывается воздух и происходит многоточечный
прижим заготовки к установочной плоскости.
Принцип действия вакуумного привода (рис. 3.8) основан на непосредствен
ной передаче атмосферного давления закрепляемой заготовке 1. Для создания
избыточного атмосферного давления между опорной поверхностью заготовки и
приспособлением образуют полость Б с вакуумом. Для лучшей герметизации
соединения заготовки 1 с опорной поверхностью А приспособления обычно пре
дусматривают уплотнения различной конструкции: резиновые кольца 2 круг
лого сечения (рис. 3.8а), резиновую полосу 2 (рис. 3.8б) и т. п. Эти уплотнения
позволяют получить в полости Б вакуум порядка 0,01–0,015 МПа. Для созда
ния вакуума применяют различные насосы. Поршневой одноступенчатый на
сос создает вакуум 0,005 МПа, ротационный (марки ВМ1) — 0,015 МПа, а цен
тробежный многоступенчатый — 0,03 МПа.
Рис. 3.8
Схема вакуумного привода
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
77
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Сила прижима заготовки
Q = F × (Pa – Pо) × 10–4K,
где F — полезная площадь прижима (площадь, ограниченная резиновым уп
лотнением, или суммарная площадь отверстий в крышке), м2; Pa — атмосфер
ное давление (Pa = 1,033 бар = 1033 ГПа); Pо — остаточное давление в вакуум
ной камере (0,015–0,01), МПа; K — коэффициент герметичности вакуумной
системы (0,8–0,85).
Вакуумные приспособления хотя и известны в практике машино и прибо
ростроения уже относительно давно, пока не находят широкого применения у
нас в стране. Между тем, как показывают исследования и опыт эксплуатации,
они с успехом могут применяться при всех видах обработки деталей машин.
Особенно эффективно применение приспособлений в условиях авиа и приборо
строения, при выполнении транспортных, сортировочных и других работ.
3.5.1. ВАКУУМНЫЕ ЗАХВАТЫ
Вакуумные захваты и транспортирующие устройства находят самое широ
кое применение в различных областях техники. Такое широкое применение
обусловлено тем, что в ряде случаев имеют значительные преимущества перед
другими способами захвата. Особенно перспективным следует считать приме
нение вакуумных захватов в электронной промышленности. Все расширяю
щееся применение таких приспособлений для операций изготовления и сборки
электронных деталей и узлов обусловлено целым рядом специфических осо
бенностей электровакуумного производства. Малые размеры, хрупкость и слож
ная конструкция деталей часто затрудняют, а в некоторых случаях исключают
возможность применения иных способов захвата. Требования вакуумной ги
гиены и высокая чистота поверхности сужают область использования механиз
мов загрузки с механическими захватами. Как правило, применение механи
ческих захватов приводит к царапинам на тщательно отполированных поверх
ностях изделий электровакуумного производства. Наличие централизованной
форвакуумной сети на заводах электронной промышленности легко решает за
дачу получения необходимого разрежения и стимулирует применение вакуум
ных захватов.
Вакуумный захват имеет следующие основные преимущества перед други
ми способами захвата:
1) быстрота захвата и освобождения изделия, обеспечивающая сокращение
вспомогательного времени и повышение производительности труда;
2) возможность использовать для захвата и транспортировки немагнитных
материалов;
3) отсутствие сосредоточенных сил зажима, приводящих к разрушению
хрупких изделий (стеклянные и тонкие металлические листы);
4) отсутствие царапин и поверхностных повреждений на полированных по
верхностях при захвате и транспортировании;
5) удобство поштучного отделения изделий в вертикальном пакете;
6) меньший вес и объем по сравнению с другими, в том числе и магнитными
захватами одинаковой грузоподъемности;
78
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
7) громадный диапазон захватываемых изделий весом от нескольких мг
(операции сборки электронных приборов) до нескольких десятков тонн (мон
тажные операции в крупнопанельном строительстве).
В настоящее время область использования вакуумных захватов ограничена
изделиями, которые имеют участки сплошной и ровной поверхности, достаточ
ной для размещения присосов.
Необходимость в вакуумных захватах для транспортировки грузов, имею
щих сравнительно негладкую поверхность, привела в последнее время к появ
лению нового направления в конструировании вакуумных захватов, характе
ризующегося применением специальных материалов для уплотнения вакуум
ной камеры и соответствующим подбором параметров вакуумной системы.
Многообразие конструкций вакуумных захватов является следствием того
широкого диапазона требований, которые предъявляются к вакуумным грузо
захватным устройствам в различных отраслях промышленности.
Для подъема и транспортирования штучных грузов небольшого веса, имею
щих гладкую поверхность, применяются вакуумные захваты, не требующие
для своей работы постороннего источника разрежения.
Автономные вакуумные захваты имеют по сравнению с другими захватами
таких же размеров малую грузоподъемность, но исключительная простота кон
струкции обеспечила им широкое применение. В подобных устройствах необ
ходимое разрежение наиболее часто создается путем изменения объема внут
ренней полости за счет поршня или за счет деформации упругого элемента.
В качестве такого элемента может использоваться сильфон, резиновая мембра
на или эластичный корпус самого захвата. Для освобождения присоса от груза
применяются различные клапаны, управляемые вручную или автоматически.
Вакуумные захваты широко применяются для поднятия и транспортиро
вания листового материала как металлического, не обладающего магнитны
ми свойствами, так и не металлического, например стекла, различных пласт
масс и пр.
Величина разрежения в полости захвата с уплотнительным кольцом, а сле
довательно, и подъемная сила во много раз больше, чем в захвате без уплотни
тельного кольца. Поэтому область применения захватов без уплотнительного
кольца ограничивается захватом и транспортировкой очень легких и хрупких
деталей электровакуумного производства (спирали ламп, тонкие пластинки
слюды, никеля и т. д.).
Методы расчета вакуумных захватов с уплотнительным кольцом и захва
тов без уплотнительного кольца имеют существенные различия. Это вызвано
тем, что в захвате с деформируемым уплотнительным кольцом вакуумный эф
фект достигается за счет разницы в статическом давлении воздуха, а в захватах
без уплотнительного кольца удерживающая сила обусловлена присасывающим
действием струи воздуха.
Вакуумные захваты с деформируемым уплотнительным кольцом по спосо
бу создания вакуума делятся на две категории: автономные и неавтономные
(с подводом вакуума от постороннего источника). Недостатком вакуумных за
хватов, работающих от насоса или другого источника разрежения, является
сравнительная сложность конструкции вакуумной установки и необходимость
в источнике энергии для привода вакуумнасосов.
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
79
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
В автономных вакуумных захватах необходимое вакуумное разрежение соз
дается путем изменения объема внутренней полости захвата. Это может дости
гаться при помощи поршня или при деформации упругого элемента. В качест
ве упругого элемента может быть использован эластичный корпус самого за
хвата, мембрана или сильфон.
В зависимости от источника возникновения разрежения неавтономные ва
куумные захваты делятся на следующие категории:
1) захваты с подводом вакуума от централизованной сети;
2) захваты с подводом разрежения от вакуумного насоса;
3) захваты с получением разрежения при помощи эжекционных устройств;
4) захваты с получением разрежения от пневмоцилиндра особой конст
рукции;
5) захваты с подводом разрежения от вентилятора.
Наряду с уже известными методами получения вакуума возможно появле
ние новых направлений в конструировании вакуумных захватов, реализую
щих уменьшение давления в изолированной системе при понижении темпера
туры заключенного в ней воздуха.
Другим перспективным направлением в конструировании вакуумных за
хватов может оказаться поглощение части воздуха во внутренней полости за
хвата в результате химических или физических процессов.
Источник получения необходимого разрежения влияет на многие особен
ности вакуумного захвата и во многих случаях определяет его экономическую
эффективность. При одновременном захвате нескольких изделий, когда произ
водительности одного насоса недостаточно для стабильной работы вакуумного
захвата, целесообразно использование централизованной вакуумной сети. При
работе захвата от эжекторных устройств требуются расходы большого количе
ства сжатого воздуха, что экономически не всегда выгодно.
Вакуумные захваты без деформируемого уплотнительного кольца приме
няются в тех случаях, когда применение захватов с уплотняющим кольцом
приводит к появлению больших изгибающих сил, которые могут деформиро
вать или даже сломать некоторые хрупкие предметы, предназначенные для
переноса.
Все захваты без деформирующего уплотнительного кольца являются неавто
номными вакуумными захватами, т. е. требуют наличия постороннего источ
ника вакуума.
В типичных захватах без уплотнительного кольца необходимый вакуум дости
гается за счет вентилятора, способного отсасывать большие объемы воздуха
при малой величине разрежения. Изза малой величины разрежения подъем
ная сила таких захватов мала. Чтобы увеличить ее, часто применяют группо
вые захваты, что позволяет увеличить действующую площадь присоса. Изза
того, что в захвате без уплотнительного кольца отсасываются большие объемы
воздуха, появляется возможность удержания и транспортировки таких изде
лий, которые не имеют больших участков сплошной и ровной поверхности (спи
рали, легкие детали с многочисленными отверстиями).
Возможна классификация вакуумных захватов и по другим признакам. По
технологическому признаку вакуумные захваты делятся на специализирован
ные и универсальнопереналаживаемые.
80
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Специализированные предназначены для захвата определенного изделия.
Универсальнопереналаживаемые используются для удержания целой серии
деталей. По способу управления вакуумные захваты могут быть ручные и авто
матизированные. В последнем случае управление клапанами, регулирующими
подачу вакуума, осуществляется автоматически по определенной программе.
3.6. ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД
Данный привод представляет собой электромоторное устрой
ство с муфтой тарирования крутящего момента (рис. 3.9).
Эти приводы используют в приспособлениях станков токарноревольвер
ной группы, агрегатных станков, в качестве приводов винтовых зажимов при
способлений — спутников автоматических линий. От электродвигателя 1 че
рез редуктор 2, кулачковую муфту 3 вращение передается на винт 4, который
перемещает гайку 5 с тягой зажимного механизма 6. При достижении на заго
товках необходимой силы зажима Q правая половина муфты 3 останавливает
ся и отжимается вправо. Концевой выключатель 7 отключает электродвига
тель. Величину исходной силы тяги можно регулировать, изменяя предвари
тельную затяжку пружины.
Открепление заготовки осуществляется при реверсировании электродви
гателя.
Для электромеханических приводов применяют в основном асинхронные
электродвигатели трехфазного тока с короткозамкнутым ротором. Такого типа
двигатели малой мощности допускают от 300 до 600 включений в час.
Рис. 3.9
Электромеханический привод
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
81
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
3.7. ЭЛЕКТРОМАГНИТНЫЕ
И МАГНИТНЫЕ ПРИВОДЫ
Все магнитные приспособления подразделяются на электро
магнитные и приспособления с постоянными магнитами (магнитные). У маг
нитных приспособлений в качестве источника магнитной энергии используют
ся постоянные магниты, у электромагнитных приспособлений — электромаг
нитная катушка, питаемая постоянным током. Подразделение станочных
приспособлений на магнитные и электромагнитные продиктовано техникоэко
номическими соображениями и подчеркивает их одинаковое право на сущест
вование.
Электромагнитные зажимные устройства применяют обычно в виде плит и
планшайб для закрепления стальных и чугунных заготовок с плоской базовой
поверхностью. Электромагнитный привод обладает рядом преимуществ, спо
собствующих его применению в станочных приспособлениях. Этими преиму
ществами являются: равномерное распределение силы притяжения по всей
опорной поверхности заготовки, что резко снижает погрешность закрепления;
высокая жесткость приспособления; свободный доступ к обрабатываемым по
верхностям заготовки; удобство управления приводом.
В приспособлениях на постоянных магнитах удерживаемая заготовка яв
ляется якорем, через который замыкается магнитный силовой поток. Для от
крепления заготовки магнит должен быть сдвинут или повернут с тем, чтобы
магнитный поток замкнулся, минуя заготовку.
В настоящее время в промышленности применяются в основном три метода
отключения магнитного потока:
1) метод шунтирования;
2) метод нейтрализации;
3) метод электрической (электроимпульсной) нейтрализации.
Сила притяжения заготовки зависит от материала, габаритных размеров и
шероховатости опорной поверхности заготовки и от характеристики магнит
ной плиты. При закреплении тонкостенных заготовок величина силы притя
жения зависит от толщины заготовки. Это связано с тем, что при малой толщи
не заготовки не весь магнитный поток замыкается через нее, часть его рассеи
вается в пространстве. С увеличением толщины заготовки сила притяжения
увеличивается, а при толщинах, бóльших ширины полюсников, — стабилизи
руется. С увеличением высоты шероховатости (Rz) базовой поверхности заго
товки увеличивается воздушный зазор между заготовкой и полюсниками, сле
довательно, сила притяжения уменьшается.
Механическое воздействие электрического поля (сила притяжения) опре
деляется по магнитной индукции:
Q = 4,06 × B2 × F (Н),
где B — магнитная индукция в рабочем зазоре (Вб/м2 = тесла); F — площадь,
через которую проходит магнитный поток, м2. Для реальных условий эта фор
мула примет вид
Q = 4,06 × K × B2 × F,
где K = K1 × K2 × K3; K1 — коэффициент, учитывающий материал заготовки,
K1 = 1 — для малоуглеродистых сталей, K1 = 0,7 — для быстрорежущих ста
82
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
лей, K1 = 0,5 — для чугунов; K2 — коэффициент, зависящий от толщины заго
товки. Если h/t = 1/4, то K2 = 1 (t — полюсный шаг, h — толщина заготовки);
K3 — коэффициент, зависящий от значения высоты шероховатости поверхно
сти и ее плоскостности. При Rz £ 20 мкм и плоскостности в пределах до 0,1
K3 = 1.
Магнитные приводы имеют преимущества перед электромагнитными: у них
отсутствует питание током, а следовательно, они являются автономными и бо
лее безопасными в работе, стоимость их эксплуатации значительно меньше.
В связи с интенсивным внедрением магнитных приспособлений в промыш
ленность значение и возможности электромагнитных приспособлений незаслу
женно приуменьшают. Считается, что электромагнитные приспособления в
недалеком будущем должны быть заменены магнитными. Между тем, основа
ний для такого утверждения нет. Электромагнитные приспособления (при срав
нении оптимальных вариантов) во многих случаях выгоднее магнитных. Так,
например, для плоскошлифовальных станков средних и больших размеров при
одновременной обработке нескольких заготовок наиболее выгодная оснастка —
электромагнитные плиты.
Приспособления с постоянными магнитами по конструкции немного слож
нее электромагнитных (это приводит к повышению их стоимости). На конст
рукцию магнитного приспособления влияет марка магнита. Приспособления с
литыми магнитами проще приспособлений с оксиднобариевыми магнитами,
но по всем остальным параметрам, как правило, уступают последним.
Одним из недостатков приспособлений с литыми магнитами является то,
что их магнитное поле сравнительно далеко распространяется в окружающем
пространстве, поэтому намагничивает и инструмент. Это обстоятельство затруд
няет использование приспособлений с литыми магнитами на работах, где при
меняется инструмент из быстрорежущих и других сталей.
3.8. ЭЛЕКТРОСТАТИЧЕСКИЙ ПРИВОД
В магнитных приспособлениях можно закреплять заготовки,
обладающие только ферромагнитными свойствами. Сила притяжения заготов
ки зависит от ее толщины. При толщине менее 1,5–2 мм сила притяжения на
столько мала, что исключает применение магнитных приспособлений.
В настоящее время в машиностроении, авиа и приборостроении получили
большое распространение немагнитные материалы, такие как алюминиевые
и медные сплавы, магниевые сплавы,
аустенитовые стали, титан и его сплавы,
тугоплавкие сплавы на основе вольфра
ма и никеля и т. п. Для закрепления за
готовок из этих материалов может быть
с успехом использована энергия элек
тростатического поля.
Действие электростатического при
Рис. 3.10
способления основано на взаимном при
Схема работы электростатического
тяжении двух тел, заряженных электри
приспособления:
ческими зарядами противоположной по 1 — заготовка; 2 — диэлектрик; 3 — корпус
лярности (закон Кулона, рисунок 3.10). приспособления.
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
83
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Если одно из тел — полюс приспособления, а другое — закрепляемая заго
товка, отделенная от полюса слоем диэлектрика, и к ним от источника питания
приложена некоторая разность потенциалов, то заготовка притягивается к слою
диэлектрика и таким образом закрепляется на приспособлении.
Система заготовкаполюс приспособления является плоским конденсато
ром. Удельную силу взаимного притяжения электродов плоского конденсатора
можно определить по формуле
q = 4,5 × 10–4 × e × E2 (МПа),
где e — относительная диэлектрическая проницаемость диэлектрика; E — на
пряженность электрического поля в диэлектрике, кВ/мм, которую можно пред
ставить как
E = u/d,
где u — разность потенциалов, В; d — толщина диэлектрического слоя, мм.
Управление процессом взаимного притяжения тел можно осуществлять
путем изменения разности потенциалов, толщины диэлектрика или его ди
электрической постоянной. Однако следует учитывать, что повышение напря
женности электростатического поля между телами ограничено электрической
прочность диэлектрика. Таким образом, удельная сила притяжения в основ
ном определяется электрическими свойствами диэлектрического слоя.
С другой стороны, поскольку закрепляемая заготовка находится в непо
средственном контакте с диэлектриком, последний должен обладать высокими
механическими свойствами, а технология его нанесения должна быть доста
точно простой. Электрические свойства наиболее часто используемых диэлек
триков приведены в таблице 3.1.
Сегнетокерамика наклеивается на поверхность приспособления. Клей —
полупроводящий. Эпоксидный и нитроцеллюлозный лаки наносятся непосред
ственно на рабочую поверхность.
Существенное влияние на силу прижима заготовки в электростатических
приспособлениях оказывает высота шероховатости контактирующих поверх
ностей заготовки.
Для закрепления заготовок, имеющих опорную поверхность с малой высо
той шероховатости (Ra < 0,6 мкм) следует использовать сегнетокерамику, тол
щиной 50–100 мкм. Тогда удельная сила прижима заготовки будет равна
q ³ 0,25 МПа при рабочем напряжении u » 3,0 кВ.
1 2 3 4 5 6 2 7 89 7
1234567839473 9
84
Powered by TCPDF (www.tcpdf.org)
72345674
7 72
95 34 5 6 72345674
5 97532 72345678394
6 73 95 1
12345678394
6 8 95 1 4
2
2
12
34567829
2
4569 792
2
2
2
578 2 92
2
12
2
7465 2
12
5! 2 92
Глава 3
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Для заготовок с худшим качеством обработки опорной поверхности (Ra ³ 0,6–
1,25 мкм) рациональнее использовать пленку из эпоксидного лака толщиной
20–25 мкм, что обеспечивает величину удельной силы притяжения q = 0,1–
0,2 МПа при напряжении u » 1,0 кВ.
К существенному недостатку электростатических приспособлений относится
высокое напряжение (u = 1–3 кВ), что требует усиленной защиты рабочего, тем
самым усложняя конструкцию приспособления.
Электростатическое поле далеко распространяется в пространстве, что тре*
бует выделения станков, оснащенных электростатическими приспособления*
ми в отдельный участок, оборудованный электростатическим экраном.
3.9. ПРИВОДЫ, НЕ ТРЕБУЮЩИЕ
ПОДВОДА ДОПОЛНИТЕЛЬНОЙ ЭНЕРГИИ
Центробежноинерционный привод (рис. 3.11). Эти приводы
применяют для быстроходных станков токарной группы. Грузы обычно разме*
щают на шпинделе станка. Преимущества этих устройств в том, что они не
требуют дополнительного источника энергии, просты в изготовлении и экс*
плуатации, включаются автоматически.
Приводы, в которых закрепление заготовки осуществляется под действи
ем составляющих силы резания (рис. 3.12). Примером привода от сил резания
может служить поводковый самозажимный патрон с эксцентриковыми кулач*
ками, применяемый на токарных многорезцовых станках. Эти патроны зажи*
мают заготовки тем сильнее, чем больше сила Pz. При проектировании таких
патронов необходимо правильно выбрать эксцентриситет кулачков, исходя из
условий надежного закрепления заготовок с изменением диаметра в пределах
допуска.
Рис. 3.11
Рис. 3.12
Схема центробежно*инерционного
привода:
Поводковый патрон с эксцентриковыми
кулачками:
1 — корпус шпинделя станка; 2 — специаль*
ные грузы; 3 — пружины возврата; 4 — ось по*
ворота тяги; 5 — тяга; 6 — шток привода креп*
ления заготовки; 7 — заготовка.
1 — шпиндельная бабка станка; 2 — эволь*
вентные кулачки для крепления заготовки;
3 — ось кулачка; 4 — пружина возврата; 5 —
резец; 6 — обрабатываемая заготовка.
Силовые приводы приспособлений
Powered by TCPDF (www.tcpdf.org)
85
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приводы от движущихся частей станка (рис. 3.13). На сверлильных и фре
зерных станках для привода зажима часто используют движение подачи. За
жимной механизм в этом случае обязательно содержит упругое звено (пружи
ну, мембрану и т. п.), необходимое для компенсации колебаний размеров заго
товок.
Рис. 3.13
Зажимное устройство, действующее
от сил подачи:
1 — шпиндель сверлильного станка; 2 — пру
жина на направляющих скалках; 3 — кондук
торная плита; 4 — обрабатываемая заготовка.
86
Powered by TCPDF (www.tcpdf.org)
Глава 3
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
КОРПУСЫ
И ВСПОМОГАТЕЛЬНЫЕ ЭЛЕМЕНТЫ
ПРИСПОСОБЛЕНИЙ
4.1. КОРПУСЫ ПРИСПОСОБЛЕНИЙ
Корпус является базовой деталью приспособления, которая
объединяет отдельные элементы приспособления. На корпусе монтируются
установочные элементы, зажимные устройства, детали или узлы для направ
ления инструмента, а также вспомогательные детали и механизмы. Корпус
воспринимает все силы, действующие на заготовку в процессе ее закрепления
и обработки, и поэтому должен обладать достаточной прочностью, жесткостью
и виброустойчивостью.
К корпусам приспособлений предъявляют следующие основные требования:
1) корпус должен иметь достаточную жесткость и прочность при минималь
ном возможном весе;
2) удобная конструкция для очистки приспособления от стружки и отвода
охлаждающей жидкости;
3) возможность быстрой и удобной установки и съема заготовки;
4) обеспечение установки и закрепления приспособления на станке без вы
верки;
5) корпус должен быть простым в изготовлении;
6) корпус должен обеспечивать безопасность работы (недопустимы острые
углы и малые просветы между рукоятками и корпусом, способные повлечь за
собой защемление рук рабочего);
7) корпусы передвижных или кантуемых приспособлений для сверления
должны обладать достаточной устойчивостью при разных положениях на столе
станка;
8) на всех позициях обработки центр тяжести приспособления не должен
выходить за пределы опорных элементов корпуса;
9) передвижные и кантуемые корпусы должны выполняться с литыми или
приставными ножками, ограничивающими поверхность контакта со столом
станка;
10) тяжелые передвижные корпусы необходимо монтировать на роликах.
Важным вопросом при конструировании корпуса является обеспечение удоб
ной очистки от стружки и отвода СОТЖ. Для этого необходимо избегать углуб
Корпусы и вспомогательные элементы приспособлений
Powered by TCPDF (www.tcpdf.org)
87
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
лений и труднодоступных мест, а также предусматривать специальные наклон
ные плоскости. Угол наклона этих поверхностей a рекомендуется принимать
для мелкой сухой стружки равным 40° (литые поверхности корпуса) и 35° (обра
ботанные поверхности). При крупной сухой стружке угол a можно уменьшить
на 5°. При обработке с СОТЖ минимальные углы наклона поверхностей корпу
са приспособления следует выбирать большими: для мелкой стружки — 50°,
для крупной — 45°. При наличии вибраций углы a можно уменьшать на 5–10°,
а при обильном охлаждении — на 15–20°.
Значительное осложнение в работе приспособления может вызывать струж
ка. Различного рода упоры и выдвижные элементы желательно предохранять
от ее попадания.
Корпус на столе станка обычно крепят при помощи болтов, заводимых в
Тобразные пазы стола. В условиях серийного производства, когда на одном и
том же станке периодически выполняются различные операции, крепление
корпуса должно быть удобным и быстродейственным, быстрая и точная уста
новка приспособления на стол станка без выверки обеспечивается направляю
щими шпонками, вводимыми в Тобразный паз стола. Шпонки выполняются в
виде коротких сухарей, привернутых к нижней плоскости корпуса. Для умень
шения влияния гарантированных зазоров на перекосы приспособления рас
стояние между шпонками следует назначать возможно бóльшим.
Корпусы тяжелых приспособлений для удобства захвата при установке и
снятии со станка целесообразно снабжать рымболтами.
Конструктивные формы корпусов весьма многообразны. В простейшем слу
чае корпус представляет собой прямоугольную плиту. Такая форма характерна
для фрезерных приспособлений. В других случаях корпус может иметь форму
планшайбы, угольника, тавра, корыта или более сложное очертание. В приспо
соблениях для сверления заготовок с нескольких сторон корпус может выпол
няться в виде коробки или ящика.
Корпусы приспособлений изготавливают методами литья, сварки, ковки,
резки из сортового проката, а также сборки из отдельных элементов на болтах
или с гарантированным натягом (рис. 4.1).
Рис. 4.1
Корпусы приспособлений, изготовленные разными методами
88
Powered by TCPDF (www.tcpdf.org)
Глава 4
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Литьем (рис. 4.1а) выполняют преимущественно корпусы сложной конфи
гурации. Однако сроки их изготовления получаются длительными, так как
необходимо делать модели, стержневые ящики, а также производить искусст
венное или естественное старение заготовок.
Сваркой (рис. 4.1б) можно получать корпуса сложных конфигураций, при
чем сроки и стоимость их изготовления могут быть значительно снижены. При
меняя усиливающие ребра, уголки, косынки, можно получать вполне жесткие
и устойчивые в работе корпусы. Стоимость сварных корпусов по сравнению с
литыми в 1,5–2 раза меньше, а вес их уменьшается до 40%. Литой вариант
может оказаться выгоднее при изготовлении нескольких совершенно одинако
вых корпусов. Для сокращения сроков и снижения стоимости подготовки про
изводства следует расширять применение сварных корпусов, особенно круп
ных размеров.
Ковкой и резкой сортового материала (рис. 4.1в, г) получают корпусы про
стых конфигураций и небольших размеров. Лишние объемы металла снимают
при последующей механической обработке заготовки. Для корпусов сложных
конфигураций эти методы могут оказаться нерентабельными, а вынужденное
упрощение конструкции приводит к утолщению стенок и увеличению веса де
тали. В корпусах сборного типа с введением дополнительных сопряжений объем
механической обработки несколько возрастает. Вместе с тем жесткость таких
Рис. 4.2
Типы нормализованных элементов корпусов:
а — плиты стальные; б, в — плиты чугунные; г, д — коробки; е — швеллеры; ж — трехгранник;
з — четырехгранник; и — угольники; к, л — угольники с ребрами; м–о — ребра; п — планки.
Корпусы и вспомогательные элементы приспособлений
Powered by TCPDF (www.tcpdf.org)
89
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
корпусов получается заниженной, что следует считать их существенным не
достатком. Значительное снижение расходов и сокращение сроков изготовле
ния приспособления в целом дает стандартизация корпусов и их заготовок.
Размеры литых заготовок для изготовления корпусов регламентированы
ГОСТ 1294787...1295487. Имея запас стандартных заготовок различного ти
поразмера, можно быстро получить желаемую конструкцию корпуса путем сня
тия лишнего металла.
Конструктивно сложные корпусы можно изготовлять из стандартных эле
ментов путем сборки. Сами элементы достаточно широко стандартизированы.
Комплектом ГОСТ стандартизировано 18 типов (260 типоразмеров) элементов
корпусов, из которых можно собрать наиболее часто встречающиеся корпусы
фрезерных и сверлильных приспособлений для заготовок размерами до 400´
400´700 мм (рис. 4.2).
Корпусы небольших специальных станочных приспособлений для средних
и легких работ иногда выполняют из эпоксидных смол. Корпусы из эпоксид
ных смол легки, компактны, прочны, износостойки, хорошо гасят вибрации.
Их можно изготавливать с минимальной механической обработкой. Усадка
эпоксидных смол мала (0,05–0,1%). Прочность корпуса может быть повышена
введением в смолу наполнителя (стекловолокна, железного порошка) или ис
пользования металлической арматуры.
4.2. КОНДУКТОРНЫЕ ВТУЛКИ
Втулки, в которых режущий инструмент направляется рабо
чей частью, называются кондукторными. Они применяются при обработке от
верстий сверлами, зенкерами и развертками. Поэтому приспособления для об
работки отверстий на станках сверлильной группы, оснащенные кондуктор
ными втулками, принято называть кондукторами. Отверстия в кондукторных
втулках изготавливаются по системе вала.
В направляющих втулках режущий инструмент направляется специально
предусмотренной на нем частью. Инструмент может иметь или одну, или две
направляющие (переднюю и заднюю). Так оформляют специальные зенкеры и
развертки. Вместе с тем направляющие участки могут быть изготовлены и на
оправках для насадных инструментов.
Наиболее часто применяемые конструкции кондукторных втулок стандар
тизованы.
Постоянные втулки без бурта по ГОСТ 1842983 (рис. 4.3а) и с буртом по
ГОСТ 1843083 (рис. 4.3б). Они применяются, когда отверстие обрабатывается
одним инструментом (сверлом или зенкером). При установке в кондукторную
плиту они запрессовываются по посадке H7/n6.
Сменные втулки изготавливают по ГОСТ 1843183 (рис. 4.3в). Они также
используются при обработке отверстий одним инструментом в условиях круп
носерийного производства, когда вследствие износа необходима их частая за
мена. Стойкость кондукторной втулки составляет 10 000–20 000 сверлений.
Сменная втулка 2 устанавливается в основную втулку 3 по посадке H7/g6 и
во избежание проворота и подъема при обработке закрепляется винтом 1. Втул
ка 3 запрессовывается в кондукторную плиту по посадке H7/n6.
90
Powered by TCPDF (www.tcpdf.org)
Глава 4
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 4.3
Стандартные кондукторные втулки:
а — постоянная без бурта; б — постоянная с буртом; в — сменная; г — быстросменная.
Быстросменные втулки по ГОСТ 1847283 (рис. 4.3г) также устанавлива
ются в основные втулки по посадке H7/g6. Применяют их в случаях, когда
отверстие обрабатывается последовательно несколькими инструментами (на
пример, сверлом, зенкером и разверткой). Для направления каждого из них
предусматривается своя быстросменная втулка.
Буртик у втулок делается высоким с накаткой для удобства удержания их
при снятии и установке. На буртике имеется сквозной продольный паз, позво
ляющий легко вынимать и вставлять втулку при замене, а также боковой уступ
для головки винта, удерживающего ее от выталкивания стружкой. При снятии
втулку поворачивают против часовой стрелки до совпадения паза с головкой
винта и поднимают вверх.
Режущий инструмент (сверла, зенкеры и развертки) устанавливается в от
верстия всех кондукторных втулок по посадке с гарантированным зазором.
При этом инструмент принимается за основной вал, а отверстия во втулках
выполняются в системе вала, и необходимая посадка достигается за счет соот
ветствующих отклонений диаметра отверстия. Для установки сверл и зенкеров
используются посадки G7 или F8 на Н8, а для разверток — G7. Однако нужно
иметь в виду, что инструмент наибольшего предельного размера должен вхо
дить в отверстие кондукторной втулки с гарантированным зазором, т. е. до
пуск на него должен быть сдвинут вверх (рис. 4.4).
Высоту постоянных и сменных втулок H выбирают по ГОСТ. Она составля
ет 1,5–2 диаметра отверстия втулки под инструмент. Высота быстросменных
втулок несколько больше, но в них предусмотрена выточка глубиной t (рис.
4.3г). При H > 2d увеличивается нагрев втулок, а при H < 1,5d ухудшается
направление инструмента. Расстояние между торцом втулки и заготовкой при
нимают (0,3–1)d. Причем чем это расстояние меньше, тем точнее расположе
ние обрабатываемого отверстия, однако оно не должно быть менее 0,3d, так как
может произойти забивание этого пространства стружкой.
Кондукторные втулки d £ 25 мм изготавливают из стали У10А с закалкой
до твердости HRC 58–63, а с d > 25 мм из стали 20 с цементацией и закалкой
HRC 42–45.
Корпусы и вспомогательные элементы приспособлений
Powered by TCPDF (www.tcpdf.org)
91
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 4.4
Схема расположения полей допусков инструмента и отверстия кондукторной
втулки
Специальные кондукторные втулки имеют конструкцию, соответствующую
особенностям заготовки и операции. На рисунке 4.5а показана втулка для свер
ления отверстий на наклонных поверхностях, удлиненную быстрорежущую
втулку (рис. 4.5б) применяют при обработке отверстий в углублениях; при ма
лом расстоянии между осями отверстий используют срезанные втулки (рис.
4.5в) или одну блочную (рис. 4.5г).
Рис. 4.5
Специальные кондукторные втулки для сверления:
а — на криволинейной поверхности заготовки; б — во впадине; в — при малом расстоянии меж
ду осями отверстий (срезанные); г — блочная.
Рис. 4.6
Направляющие вращающиеся втулки на подшипниках:
а — скольжения; б — качения.
92
Powered by TCPDF (www.tcpdf.org)
Глава 4
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Направляющие втулки. Обычно их выполняют вращающимися на подшип
никах скольжения или качения, особенно при больших скоростях резания
(рис. 4.6). В обеих конструкциях на внутренних поверхностях втулок прорезан
паз для шпонки борштанги, чем обеспечивается их принудительное вращение.
Для облегчения попадания шпонки в паз втулки ее часто выполняют со ско
шенными кромками или плавающей.
Отверстие направляющей втулки выполняется с отклонениями по H7, а
диаметр инструмента — по g6.
4.3. КОПИРЫ
Для обработки фасонных поверхностей на универсальных стан
ках применяют приспособления, снабженные копировальными устройствами.
Назначение копиров заключается в обеспечении траектории относительного
движения режущего инструмента, необходимой для получения требуемого кон
тура детали.
Профиль копира определяется графически. Он должен быть строго увязан с
профилем обрабатываемой заготовки и диаметрами фрезы и ролика. Копиры
применяются при обработке заготовок на фрезерных, токарных, строгальных,
шлифовальных и других станках.
Копиры применяют при фрезеровании фасонных поверхностей на верти
кальнофрезерных станках, а также при обработке на токарных, токарноре
вольверных и карусельных станках.
На рисунке 4.7 показана схема фрезерования заготовки по копиру методом
круговой подачи. Изделие и копир вращаются вокруг общей оси с постоянной
угловой скоростью.
Стол станка разобщен с винтом продольной подачи, а ролик прижимается к
копиру под действием груза или пневмопривода. При данной схеме обработки
профиль копира отличается от профиля детали, так как оси ролика и фрезы не
лежат на одной прямой, а смещены на расстояние а. Изготовление копиров
трудоемко и поэтому целесообразно при серийном и массовом производстве.
Рис. 4.7
Схема фрезерования на копировальнофрезерном станке
Корпусы и вспомогательные элементы приспособлений
Powered by TCPDF (www.tcpdf.org)
93
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
4.4. УСТАНОВЫ
Установы предназначаются для настройки режущего инстру
мента на выполняемый размер.
Установы бывают высотные и угловые. Высотные установы позволяют ори
ентировать инструмент только по одной оси координат. Они бывают по конст
рукции двух разновидностей: круглыми и прямоугольными. С помощью уста
новов настраивают инструмент по двум координатам. Эти установы преимуще
ственно применяются для фрезерных приспособлений. Настройка инструмента
по установам производится с помощью щупа.
Установы изготавливаются, как правило, из сталей 20Х и 45, поверхности
цементируются и закаливаются до твердости НRC 45–52. Рабочая и присоеди
нительные поверхности шлифуются до Ra = 0,6–0,8 мкм.
Установы для фрез бывают стандартные (тип I — ГОСТ 13443698, тип II —
ГОСТ 1344488), угловые (тип I — ГОСТ 1344588, тип II — ГОСТ 1344688)
(рис. 4.8) и специальные для установки фасонных фрез.
Координацию фрез по установам производят с помощью стандартных щу
пов: плоских (ГОСТ 892588) и цилиндрических (ГОСТ 892688) (рис. 4.9). Пло
ские щупы изготавливают толщиной 1,3 и 5 мм, а цилиндрические — диамет
ром 3 и 5 мм. Толщина и диаметр щупов выдерживаются с отклонением по h6.
Рис. 4.8
Стандартные установы для фрез:
а — высотный; б — угловой.
Рис. 4.9
Примеры координации фрез по установам с помощью щупа:
а — дисковой фрезы по высотному установу; б — то же, по угловому; в — фасонной фрезы с выпук
лым профилем; г — то же, с вогнутым; 1 — установ; 2 — щуп; 3 — фреза.
94
Powered by TCPDF (www.tcpdf.org)
Глава 4
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Установы (кроме высотного типа I) фиксируют на корпусе приспособления
двумя штифтами и закрепляют винтами. Располагают их на некотором рас!
стоянии от обрабатываемой поверхности заготовки.
Изготавливают установы из сталей 15 и 20 с цементацией поверхности на
глубину 0,8–1,2 мм и закалкой до твердости HRC 50–60.
4.5. ДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА
Делительные устройства служат для того, чтобы при одном уста!
нове заготовки придать ей несколько положений, расположенных на опреде!
ленном шаге относительно друг друга. При многопозиционной обработке чаще
приходится осуществлять поворот заготовки на угловой шаг, поэтому далее
будут рассмотрены поворотные делительные устройства.
Они могут выполняться в виде самостоятельного агрегата, используемого
для закрепления различных приспособлений с целью поворота на угловой шаг
вместе с заготовкой.
К поворотным делительным устройствам относятся универсальные дели!
тельные головки, поворотные делительные столы и стойки. Конструкции их
весьма разнообразны, некоторые из них нормализованы.
Делительное устройство может входить в состав самого приспособления,
обычно специального. В обоих случаях оно имеет следующие основные детали
и узлы: неподвижную и поворотную части, делительный диск, фиксатор и ме!
ханизм для скрепления поворотной части с неподвижной после деления.
Неподвижной частью в делительном устройстве является корпус. Поворот!
ная часть обычно монтируется на валу, устанавливаемом в корпусе. В зависи!
мости от массы поворотной части вместе с заготовкой она может монтироваться
на подшипниках скольжения или качения.
На поворотной части размещаются опорные элементы и зажимные устрой!
ства для заготовки. В универсальных делительных головках, столах и стойках
на поворотной части предусматриваются посадочные места для установки при!
способлений.
Делительное устройство состоит из диска, закрепляемого на поворотной
части приспособления, и фиксатора. Диск имеет гнезда, в которые входит фик!
сатор. Гнезда располагаются по окружности с таким угловым шагом, который
требуется выдержать на обрабатываемой заготовке. В универсальных делитель!
ных приспособлениях гнезда размещают так, чтобы одним диском обеспечить
деление окружности на несколько равных частей.
По форме гнезд делительные диски делят на две группы: с отверстиями и с
пазами (рис. 4.10). Диски 1 изготавливают сырыми с запрессованными в них
термически обработанными и точно отшлифованными втулками 2 (рис. 4.10а).
Отверстие в них под фиксатор 3 делают цилиндрическим (тип I) или кониче!
ским (тип II). Последние обеспечивают большую точность деления.
Делительные диски с асимметричными пазами (тип I) точнее, чем с сим!
метричными (тип II), так как загрязнение симметричного паза по любой плос!
кости вызовет погрешность деления. При равной точности угловых шагов (a ± g)
диски с пазами обеспечивают большую точность деления, но они сложнее в
изготовлении.
Корпусы и вспомогательные элементы приспособлений
Powered by TCPDF (www.tcpdf.org)
95
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 4.10
Делительные диски:
а — с отверстиями; б — с пазами.
Фиксаторы предназначены для точного расположения делительного диска.
Рабочий профиль фиксатора определяется профилем гнезда делительного дис
ка. Некоторые из типовых конструкций фиксаторов для дисков с пазами и
выступами показаны на рисунке 4.11.
Рис. 4.11
Конструкции фиксаторов для дисков с пазами и выступами:
а, б — фиксаторы откидные; в — цанговый, с приводом через шток.
96
Powered by TCPDF (www.tcpdf.org)
Глава 4
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
УНИФИКАЦИЯ
И СТАНДАРТИЗАЦИЯ
СТАНОЧНЫХ ПРИСПОСОБЛЕНИЙ
Ускорение темпов технического прогресса вызывает необхо
димость частой смены выпускаемых машин новыми, более совершенными. При
этом вся специальная оснастка списывается, а затем проектируется и изготав
ливается новая. Это влечет за собой большой объем трудовых и денежных за
трат на производство приспособлений, что в свою очередь отражается на сроках
технологической подготовки производства и себестоимости производимой про
дукции. Более половины всех трудовых затрат в технологической подготовке
производства приходится на изготовление приспособлений и оснастки. Поэто
му проблема сокращения цикла и затрат на подготовку производства становит
ся особенно острой.
В условиях серийного и мелкосерийного производства особенно важно на
личие гибкой переналаживаемой высокомеханизированной системы приспо
соблений. Эффективными методами, ускоряющими и удешевляющими проек
тирование и изготовление приспособлений, является унификация, нормализа
ция и стандартизация деталей и элементов приспособлений на основе научных
достижений и передового опыта.
Анализ опыта работы машиностроительных заводов показывает, что боль
шинство специальных приспособлений могут быть заготовлены из нормализо
ванных и стандартных элементов. Приспособления с нормализованными элемен
тами являются экономичными для мелкосерийного и многономенклатурного
производства, а многократное использование нормализованных и стандартных
элементов приспособлений снижает их себестоимость и повышает техническую
оснащенность производства.
Под нормализацией понимают стандартизацию в масштабе завода, ведом
ства и т. д. Высшей формой нормализации является разработка общесоюзных
стандартов ГОСТ. Проведение работ по нормализации и стандартизации при
способлений предшествует унификация.
Унификация — это рациональное сокращение числа типов, видов и разме
ров станочных приспособлений, деталей, заготовок одного функционального
назначения при улучшении их техникоэкономических и качественных харак
теристик.
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
97
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Исходя из определения термина «унификация изделия», данного в стан
дарте (ГОСТ 23945.080), можно сказать, что унификация станочных приспо
соблений есть приведение их к единообразию на основе установления рацио
нального числа их разновидностей.
Унификация станочных приспособлений распространяется на типы, кон
струкции, основные размеры и параметры приспособлений, их составные ча
сти, а также на материалы, нормы точности и др. Унификации подвергаются:
детали приспособлений, если они предназначены для одной цели и имеют близ
кие размеры (корпусные плиты, зажимные цанги, кольцевые и рожковые мем
браны, кассеты для многоместных фрезерных приспособлений и др.); сбороч
ные единицы (узлы), выполняющие одинаковые по характеру функции при
незначительно отличающихся рабочих размерах, габаритах (встроенные пнев
моцилиндры двойного действия, пневмогидравлические усилители, эксцентри
ковые зажимные механизмы, действующие на два прихвата, делительные ме
ханизмы и др.), приспособления для оснащения типовых операций, если их
конструкции аналогичны по схемам, габаритам, условиям эксплуатации.
Исследование технологических процессов обработки типовых заготовок на
токарных, фрезерных, сверлильных и других операциях в условиях одного
завода или одной отрасли показали, что при изготовлении одинаковых или
близких по форме заготовок одноименные операции часто выполняются по раз
личным схемам. При этом во многих случаях используются станочные приспо
собления различных конструкций. Это вызывает наличие на заводах большого
количества разнообразных схем одноименных технологических операций. В ря
де случаев на одном и том же заводе одноименные операции выполняются с
различной производительностью, иногда отличающейся в несколько раз.
Такое положение объясняется многовариантностью технологических ре
шений и отсутствием научных основ выбора схем конструкций приспособле
ний и структур технологических операций, выполняемых на металлорежущих
станках и автоматических линиях, путем количественной и экономической их
оценки.
Нормализация и стандартизация дают экономический эффект на всех эта
пах создания и использования приспособлений.
1. На этапе проектирования. Нормализованные и стандартные детали и сбо
рочные единицы не конструируют заново, и следовательно, нет необходимости
делать на них рабочие чертежи. В связи с этим уменьшается стоимость и сокра
щается время проектирования приспособления.
2. На этапе изготовления. При изготовлении разнообразных приспособле
ний с использованием нормализованных и стандартных деталей и сборочных
единиц увеличивается число одинаковых деталей и сборочных единиц. Поэто
му их можно изготовлять не единицами, а партиями, а также в запас, пользу
ясь которым, можно сократить срок изготовления приспособлений.
3. На этапе эксплуатации. Ряд быстроизнашивающихся деталей приходит
ся заменять. При использовании нормализованных и стандартных элементов
ускоряется и удешевляется ремонт приспособлений.
Когда приспособление изношено или в нем исчезла необходимость, возможно
дальнейшее использование еще не изношенных нормализованных стандарт
ных деталей и сборочных единиц при изготовлении других приспособлений.
98
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
В серийном производстве наблюдается тенденция построения технологиче
ских процессов и их оснащения приспособлениями по типу крупносерийного.
Это естественно, так как именно крупносерийное производство обеспечивает
наибольшую производительность и наименьшую себестоимость продукции.
Вместе с тем частая сменяемость объектов производства делает неэффектив
ным использование специальных приспособлений, даже изготовленных с мак
симальным использованием нормализованных и стандартных элементов. Это
противоречие привело к идее создания таких систем приспособлений, которые,
оставаясь специальными на этапе их использования, были бы универсальны на
этапах проектирования и изготовления. Эта идея нашла выражение в создании
систем переналаживаемых сборноразборных приспособлений (СРП), имеющих
обратимые стандартные и нормализованные элементы, подлежащие многократ
ному использованию.
Главная цель создания систем — значительно увеличить в приспособлени
ях число стандартных и нормализованных узлов, механизмов и повысить эф
фективность приспособлений за счет многократного их использования. Наибо
лее сложно при создании таких систем нормализовать корпусы приспособле
ний, придать им универсальность.
Эта задача решается двумя способами.
При первом способе вместе с корпусом нормализуются зависящие от него
элементы так, чтобы эта сборочная единица обладала достаточной универсаль
ностью. По этому принципу создана система универсальноналадочных при
способлений (УНП) и приспособлений для групповой и предметнопоточной
обработок.
При втором способе любой сложный корпус может быть собран из ограни
ченного числа геометрически простых нормализованных частей — плиток, сто
ек, угольников и т. п. Составляющие части корпуса могут быть использованы
многократно. По этому принципу создана и успешно используется система уни
версальносборных приспособлений (УСП).
Примером унифицированных базовых моделей могут служить гидрофици
рованная базовая плита (рис. 5.1а) и базовый угольник (рис. 5.1б). На рисун
ке 5.1в, г показаны компоновки двух приспособлений, в которых использована
одна и та же базовая плита. В первом случае (рис. 5.1в) обрабатываемые пло
ские заготовки 2 закрепляются на базовой плите 1 с помощью прихватов 3, дей
ствующих от гидросистемы 4.
В приспособлении для фрезерования проушин в заготовке вилок 6 (рис. 5.1г)
использован базовый угольник 5 с зажимным механизмом 7. Базовый уголь
ник может быть также гидрофицирован.
Рис. 5.1
Модифицированная унификация приспособления
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
99
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
На этой базовой плите могут быть смонтированы и другие базовые элемен
ты (например, гидрофицированные универсальные тиски с подвижной и не
подвижной губками для различных фрезерных работ, а на базовом угольнике
унифицированной конструкции — различные заготовки деталей типа рыча
гов). Такая конструкция базовых элементов позволяет многократно использо
вать их в компоновках различных приспособлений.
Стандартизацию станочных приспособлений осуществляют на нескольких
уровнях.
На государственном уровне разрабатываются государственные стандарты
(ГОСТ), устанавливающие правила выбора и организации разработки средств
технологического оснащения, требования к организации автоматизированно
го решения задач обеспечения производства оснасткой, учета технологической
оснастки и др.
На отраслевом уровне министерства и ведомства разрабатывают отрасле
вые стандарты (ОСТ) на станочные приспособления и их типажи, характерные
для изделий данной отрасли, на типовые конструкции приспособлений, мето
ды, нормы проектирования и производства их.
На уровне предприятий выпускают стандарты предприятий (СТП), уста
навливающие на основе ГОСТ или ОСТ ограничительные перечни деталей и
сборочных единиц, разрешенных к применению на данном предприятии, а так
же нормы и правила проектирования и изготовления приспособлений в цехах
предприятия.
Системы станочных приспособлений для обработки заготовок резанием пре
дусмотрены ГОСТ 14.30583. Они имеют различные способы агрегатирования
составных частей, различные конструктивные особенности, поэтому их эффек
тивное использование связано с определенными производственными условия
ми, типом производства, характером операций, а также с техническими воз
можностями и материальными факторами, присущими той или иной системе.
Всего предусмотрено шесть систем приспособлений:
· УБП — универсальные безналадочные;
· УСП — универсальносборные;
· УНП — универсальные наладочные;
· СНП — специализированные наладочные;
· СРП — сборноразборные;
· НСП — неразборные специальные приспособления.
5.1. УНИВЕРСАЛЬНЫЕ
БЕЗНАЛАДОЧНЫЕ ПРИСПОСОБЛЕНИЯ
Универсальные безналадочные системы представляют собой за
конченный механизм с постоянными элементами для базирования заготовок и
простыми схемами базирования. К типовым представителям УБП можно отне
сти универсальные тиски, двух, трех и четырехкулачковые патроны, прямо
угольные магнитные плиты, делительные универсальные головки, поводко
вые центры. Зажимные элементы приспособлений имеют возможность регули
рования, что обеспечивает установку заготовок, отличающихся размерами
базовых поверхностей в пределах регулирования зажимного элемента. В ряде
100
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
случаев, например при использовании несамоцентрирующих патронов, приме
няют выверку заготовок при их установке.
В настоящее время имеется около сорока государственных стандартов на
УБП. Это позволяет организовать их специализированное производство и по
ставлять УБП отдельно по централизованным заявкам предприятий или как
принадлежность к станкам.
5.2. УНИВЕРСАЛЬНО СБОРНЫЕ
ПРИСПОСОБЛЕНИЯ
Универсальносборные приспособления (УСП) состоят из ком
плекса стандартизованных деталей, из которых собирают различные приспо
собления одноцелевого назначения. Они используются кратковременно как спе
циальные приспособления. Основные элементы комплекса УСП показаны на
рисунке 5.2. Кроме этих основных элементов, в комплект УСП входят также
подкладки и опоры различной конфигурации (в том числе с угловым располо
жением поверхностей), шпонки, пальцы, переходные втулки, фиксирующие
штыри, кондукторные втулки, детали для соединения элементов УСП (винты,
болты, шпильки, гайки, шайбы), рукоятки, эксцентрики, пружины.
Рис. 5.2
Основные детали УСП
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
101
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Элементы комплекта УСП, кроме основных пазов и выступов, имеют также
гладкие и резьбовые отверстия, прорези, пазы других размеров, что обеспечивает
выполнение различных компоновок приспособлений. Важным преимуществом
УСП является то, что сборку осуществляют либо по заданной компоновочной
схеме, либо по готовой детали и ее чертежу без проектирования приспособления.
УСП находят широкое применение в мелкосерийном и серийном производ%
стве, когда срок службы каждого приспособления относительно мал. УСП могут
быть применены и в крупносерийном производстве в период освоения выпуска
новой продукции с последующей заменой их специальными. Эти приспособле%
ния целиком состоят их деталей и элементов нормализованных и стандартных
по всем параметрам. Поэтому все элементы такого приспособления обратимы и
взаимозаменяемы и могут быть использованы многократно. Это означает так%
же, что все детали системы УСП могут быть изготовлены заранее централизо%
вано, и сроки их изготовления не будут влиять на время изготовления приспо%
соблений. Проектирование и изготовление такого приспособления сводится к
сборке его из готовых элементов и наладке. Рабочих чертежей не требуется.
После обработки партии заготовок приспособление разбирают на элементы или
переделывают (перенастраивают) для использования при обработке другой пар%
тии, других заготовок. Применение систем УСП позволяет использовать прин%
ципы технологии крупносерийного и серийного производства в мелкосерий%
ном и многономенклатурном производстве.
Все детали УСП разделены на группы:
а) базовые — плиты, планшайбы, угольники и пр.;
б) корпусные и опорные — призмы, угольники, подкладки и др.;
в) установочные — шпонки, пальцы, установочные диски, центры, втулки,
валики и др.;
г) направляющие — кондукторные втулки, кондукторные планки, колон%
ки и др.;
д) прижимные — прихваты различных типов;
е) крепежные — винты, болты, гайки;
ж) разные — рукоятки, экоцентрики, пружины и пр.;
з) неразборные — поворотные головки, центровые бабки, фиксаторы, само%
устанавливающиеся опоры, механогидравлические зажимы, пневматические
цилиндры и др.
Базовые и корпусные детали покрыты сеткой пазов — шпоночных для ори%
ентирования деталей относительно друг друга и Т%образных для крепления в
них других деталей с помощью болтов.
УСП обеспечивают высокую точность обработки по 8–10%му квалитету. Это
достигается за счет повышенной точности изготовления элементов УСП с до%
пусками размеров, определяющих точность базирования не грубее 6–7%го ква%
литета. Для этих элементов в стандартах установлены малые допуски формы,
расположения и шероховатости поверхностей. Детали УСП изготавливают из
легированной стали 12ХН3А с цементацией и закалкой (HRC 45–48); 38ХА,
У8А, У10А — с закалкой и отпуском до твердости HRC 40–45.
В комплект УСП может входить до 25–30 тысяч деталей, из которых одно%
временно можно собрать до 300 разных приспособлений. Комплекты УСП мо%
гут быть и с меньшей номенклатурой в зависимости от требования заказчика.
102
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Все вышеперечисленное значительно по
вышает стоимость изготовления комплекта
УСП, но, с другой стороны, обеспечивает ста
бильные показатели точности обработки и
увеличивает срок службы комплекта УСП.
Дальнейшее развитие УСП заключает
Рис. 5.3
ся в создании номенклатуры новых норма
Универсальносборное
приспособление для сверления
лизованных и стандартных элементов с вы
сокомеханизированными зажимами. В этом плане для систем УСП наиболее
перспективным является применение силовых приводов с постоянными маг
нитами.
Пример универсальносборного приспособления для сверления показан на
рисунке 5.3. На базовой плите установлены две призмы и, требуемое положе
ние которых ориентируется с помощью шпонок. Закрепление заготовки осу
ществляется прихватом с помощью гайки и винта. Кондукторная планка уста
новлена на опоре и закреплена на базовой плите гайкой и болтом, головка кото
рого входит в Тобразный паз плиты. Болт проходит через отверстие в опоре и
планке. Спиральное сверло при работе направляется по кондукторной втулке.
Все элементы приспособления стандартизованы. Приспособление исполь
зуется на вертикальносверлильном станке.
5.3. УНИВЕРСАЛЬНО НАЛАДОЧНЫЕ
ПРИСПОСОБЛЕНИЯ
Универсальные наладочные и специализированные наладоч
ные приспособления состоят из базового агрегата и сменных наладочных эле
ментов. Причем в УНП базовый агрегат универсальный, а в СНП — специали
зированный; УНП служит для установки различных по конфигурации и схе
мам базирования заготовок, а СНП — родственных по конфигурации заготовок
с идентичными схемами базирования. Базовые агрегаты наладочных приспо
соблений представляют законченные механизмы долговременного действия,
их многократно используют в компоновках.
УНП предназначены для обработки заготовок, разных по конструктивно
технологическим параметрам. Их компонуют из базовой части и сменной налад
ки. Базовая часть является постоянной и может быть изготовлена заблаговре
менно и централизовано по соответствующим стандартам. Сменную наладку
проектируют и изготавливают по мере надобности в зависимости от конструк
тивных особенностей обрабатываемых заготовок.
Базовая часть обычно состоит из корпуса приспособления со встроенным
или прикрепленным силовым приводом, зажимного механизма, элементов для
базирования сменных наладок. При необходимости дополнительно могут быть
использованы поворотные и делительные механизмы с устройствами фикса
ции и крепления поворотной части.
Сменные наладки состоят из установочных элементов и в некоторых случа
ях дополнительных зажимных устройств.
При переходе на обработку заготовки другой детали УНП переналаживают
одним из следующих способов:
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
103
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
а) перестановкой и перезакреплением постоянных установочных элементов;
б) полной или частичной заменой установочных и других сменных эле
ментов;
в) одновременной заменой и перемещением установочных и других смен
ных элементов.
Первый способ используют при обработке заготовок с подобными по форме,
но разными по размерам технологическими базами. Эти УНП требуют мини
мальных затрат времени и средств на переход к обработке заготовки другой
детали.
Примером такого УНП могут служить пневмотиски. Переналадку приспо
собления на другую деталь осуществляют перестановкой по рифлям ползуна
губок.
Другие два способа переналадки УНП используются при групповой обра
ботке деталей на переменнопоточных линиях, а также для обработки деталей
другой конструкции.
Примером может служить кондуктор для сверления отверстий в деталях
типа фланца. Переналадка кондуктора на обработку другой детали группы осу
ществляется заменой сменного вкладыша с установочным элементом и кон
дукторных втулок (или кондукторной плиты).
Базовыми агрегатами УНП служат стандартизованные на государственном,
отраслевом или заводском уровне машинные тиски, скальчатые кондукторы,
пневматические трехкулачковые патроны, планшайбы с переставными уголь
никами и другие приспособления. Базовые агрегаты изготавливают до запуска
изделия в производство и эксплуатируют до полного износа.
Наладку приспособлений осуществляют за счет смены установочных и за
жимных элементов, монтируемых на базовом агрегате. В некоторых случаях
сменные установочные элементы допускают регулирование, что позволяет рас
ширить номенклатуру устанавливаемых заготовок, различающихся своими
размерами.
Наладочные приспособления применяют в условиях серийного производст
ва, характеризуемого запуском в производство заготовок периодически повто
ряющимися партиями. При запуске новой партии базовый агрегат остается
закрепленным на станке, на нем только переустанавливают сменные наладки.
Для точной установки наладок служат центрирующие штыри или шпонки.
Смена наладок требует минимального времени.
На рисунке 5.4а показано УНП на базе машинных тисков с пневматическим
приводом для фрезерования деталей 1 или 2, а на рисунке 5.4б, в наладка скаль
чатого кондуктора для обработки различных деталей 11 и 14. Переналадки
машинных тисков осуществляются за счет смены планок 4 и 5, устанавливае
мых на неподвижной 6 и подвижной 3 губках тисков. Закрепление заготовок
производится с помощью пневматического зажимного устройства 7. На этом
приспособлении можно также выполнять строгальные и некоторые другие опе
рации.
Для переналадки скальчатого кондуктора (рис. 5.4б, в) необходимо устано
вить в кондукторной плите новые кондукторные втулки 8 и 10 (или заменить
кондукторную плиту) и установочные элементы 12 и 13. При опускании плиты
кондуктора закрепление заготовок осуществляется через элементы 9 и 15.
104
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 5.4
УНП и сменные наладки
Сменные элементы могут быть весьма различны, что обеспечивает возмож!
ность обработки значительной номенклатуры деталей, запускаемых в произ!
водство партиями. Смена наладок требует незначительного времени.
5.4. СБОРНОРАЗБОРНЫЕ
ПРИСПОСОБЛЕНИЯ
Сборно!разборные приспо!
собления собирают, как правило, из стан!
дартных деталей и сборочных единиц и
используют как специальные приспособле!
ния долгосрочного применения. Переком!
поновку СРП осуществляют непосредст!
венно на рабочем месте без снятия базово!
го агрегата. СРП собирают на весь период
производства изделия, но в экономически
обоснованных случаях допускается исполь!
зовать СРП как наладочное приспособление.
Пример компоновки СРП для обработ!
ки внутренних поверхностей корпусной
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
Рис. 5.5
Пример компоновки СРП
105
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
детали на горизонтальнорасточном станке показан на рисунке 5.5. Стандарт
ными деталями являются плита 1 и угольник 2. Заготовку 4 базируют и закре
пляют на специализированных элементах 3.
5.5. ПРИМЕРЫ УНИФИКАЦИИ
УЗЛОВ И КОНСТРУКЦИЙ
ПЕРЕНАЛАЖИВАЕМЫХ ПРИСПОСОБЛЕНИЙ
ДЛЯ ТОКАРНЫХ СТАНКОВ
Для токарных станков широко используются различные уни
версальные приспособления: двух, трех, четырехкулачковые патроны, цан
говые, поводковые, мембранные патроны, плавающие и поводковые центра,
оправки, планшайбы, угольники, люнеты, а также специальные приспособле
ния. В двухкулачковых самоцентрирующихся патронах закрепляют различ
ные фасонные поковки и отливки. В четырехкулачковых патронах, на план
шайбах и угольниках закрепляют заготовки сложной прямоугольной и несим
метричной формы. При различном соотношении длины и диаметра заготовок
они устанавливаются либо в патроне, либо в патроне и заднем центре. Длинные
детали (l/d = 10–12) обрабатываются с использованием люнета.
Кроме кулачковых патронов для передачи крутящего момента от шпинде
ля станка к заготовке используются поводковые патроны и центры. Цанговые
патроны применяют главным образом для закрепления холоднотянутого прут
ка или заготовок по предварительно обработанной поверхности.
Совершенствование токарных приспособлений осуществляется в направле
нии повышения точности, жесткости закрепления заготовок, быстродействия
и универсальности, возможности переналадки и выполнения дополнительных
операций обработки, не предусмотренных данным станком.
Приведенные ниже некоторые кон
струкции станочных приспособлений
показывают практическую реализацию
указанных направлений для токарных
станков.
На рисунке 5.6 показан трехкулач
ковый токарный патрон с расширенным
диапазоном изменения усилия гидроза
жима. Патрон предназначен для бази
рования и закрепления цилиндриче
ских заготовок с центрированием по на
ружному или внутреннему диаметру на
токарных полуавтоматах. Патрон со
стоит из корпуса 8, спирального дис
ка 9, сегмента 10, рейки 2, планшай
бы 1, ползуна 5, рычага 3, тяги 7, пле
ча 4, кулачка 6. Патрон устанавливают
на коническую посадочную часть шпин
деля станка и фиксируют крепежными
болтами. Усилие от гидроцилиндра пе
Рис. 5.6
Трехкулачковый токарный патрон
редается через полую тягу, рычаги, пол
106
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
зуны на кулачки, которые зажимают обрабатываемую заготовку. Положение
кулачков регулируется путем поворота спирального диска вокруг своей оси.
Размеры обрабатываемых заготовок 25–215 мм. Пределы усилия зажима 70–
120 кН. Применение патрона повышает технологические возможности станка
и точность базирования заготовок.
Для станков токарной группы значительное внимание уделяется средствам
переналадки приспособлений, что повышает производительность обработки и
сокращает сроки подготовки производства.
Переналаживаемое приспособление отличается от универсального тем, что
имеет основную, базовую часть, которая не заменяется и длительное время
используется на станке, и наладочную, сменную часть, соответствующую кон&
фигурации и размерам конкретно обрабатываемой заготовки.
На рисунке 5.7 приведена конструк&
ция группового переналаживаемого при&
способления, предназначенного для об&
работки заготовок деталей типа дисков
на токарных станках в серийном произ&
водстве. Приспособление представляет
собой планшайбу 5 с центрирующим бур&
том, позволяющим надежно совместить
ось приспособления с осью шпинделя
станка. На лицевой (рабочей) стороне
планшайбы выполнены радиальные па&
зы для установки домкратов 4 и устано&
вочных болтов с прихватами 2.
На рабочей поверхности планшайбы
по трем радиальным лучам выполнено
по три посадочных отверстия, образую&
щих три концентрических окружности
D2, D3, D4. В отверстиях устанавливают
и закрепляют ролики 1 диаметром D1.
Для приспособления выполнен комплект
роликов нескольких диаметров D1.
Ролики, установленные в отверсти&
ях по диаметрам D2, D3, D4, образуют со&
Рис. 5.7
вокупность концентрически расположен&
Групповое переналаживаемое приспособ&
ных посадочных диаметров, используе&
ление
мых в качестве базы для дисков.
При обработке дисков приспособление устанавливают и закрепляют на план&
шайбе станка. Выбирают диаметры роликов и отверстий, комбинация которых
образует диаметр базы для отверстия дисков. Диск надевают на ролики и за&
крепляют перемещающимися в станочных пазах прихватами. Для исключе&
ния вибраций при обработке закрепленный диск подпирается домкратами.
Для обработки дисков диаметром 150–800 мм достаточно располагать при&
способлениями описанной конструкции двух типоразмеров. Применение при&
способления сокращает количество единиц технологической оснастки, а также
уменьшает сроки подготовки производства.
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
107
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
На рисунке 5.8 показана конструк
ция быстропереналаживаемого механи
зированного приспособления, предна
значенного для механической обработ
ки деталей типа крышек в серийном
производстве на шестишпиндельном то
карном полуавтомате 1Б284.
Приспособление состоит из гидроза
жима со специальными кулачками и пя
ти сменных колец, которые служат для
переналадки приспособления на четы
ре типоразмера крышек. Кольца встав
ляют выступами в диск и прикрепляют
к нему четырьмя винтами. Обрабатыва
емую заготовку устанавливают в кольцо
и центрируют по шаблону, расположен
ному на кронштейне, который закреп
лен на колонке станка. При движении
Рис. 5.8
Быстропереналаживаемое приспособле
штока гидрозажима соединенная с ним
ние к токарному станку
траверса увлекает в эту же сторону и
кулачки, находящиеся в зацеплении с траверсой, в результате чего заготовка
зажимается.
Приспособление снижает трудоемкость изготовления крышек и повышает
производительность станочных операций.
Цанговые патроны также относятся к переналаживаемым приспособлени
ям, которые обеспечивают высокую точность центрирования. При наладке сни
мается цанга и заменяется новой, позволяющей закреплять заготовку с други
ми размерами.
На рисунке 5.9 показан цанговый патрон, предназначенный для обработки
заготовок в серийном производстве на токарных полуавтоматах. Заготовка 5,
базируемая по отверстию, надевается на
цангу 2 и фиксируется по высоте жест
кими упорами 9, которые поддерживают
ее при обработке. Цанга с помощью гид
роцилиндра станка, гайки 3 и тяги 6 пе
ремещается вниз. При этом скалки 4 раз
жимаются, чем и обеспечивают зажим
заготовки увеличением диаметра скал
ки по сравнению с кулачковым патро
ном и уменьшением зазора между скал
кой и конусом патрона 8 с помощью вин
та 7. Несоосность при закреплении тяги
в штоке гидроцилиндра станка ликви
дируется за счет зазора 0,5–1 мм между
диаметрами скалки 4 и тяги 6.
При разжиме цанга от перемещения
Рис. 5.9
вверх
удерживается фланцем 1. На цан
Цанговый патрон
108
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 5.10
Цанговая оправка
говом патроне можно обрабатывать заготовки с внутренним диаметром от 40 до
50 мм и наружным от 100 до 250 мм.
Приспособление имеет большую жесткость, что обеспечивает высокое ка"
чество и точность обработки.
Одним из условий повышения качества обработки является повышение точ"
ности установки заготовок на станке. Для установки деталей типа труб, гильз,
фланцев по внутреннему диаметру используют обычные и цанговые оправки.
Одна из конструкций универсальной переналаживаемой цанговой оправки при"
ведена на рисунке 5.10. Оправка состоит из двух независимых друг от друга
узлов, что позволяет закреплять на ней различные заготовки. Посадочный диа"
метр d сменных цанг соответствует диаметру обрабатываемой детали 5. При
завинчивании гаек 1 конусы 2, двигаясь вдоль осей 4, разжимают цанги 3 и
закрепляют заготовки. Оправку с закрепленной на ней заготовкой устанавли"
вают в центрах токарного станка. Передача вращения от шпинделя станка на
оправку осуществляется хомутиком. При большой длине обрабатываемых за"
готовок для увеличения жесткости системы «оправка — заготовка» между пе"
редней и задней бабкой станка устанавливается люнет. Оправка применяется в
мелкосерийном производстве для обработки заготовки различной длины L.
Наименьшая длина обрабатываемой заготовки 180 мм, а наименьший диаметр
85 мм. Применение приспособления позволяет значительно сократить номенк"
латуру используемых оправок, уменьшить сроки подготовки производства.
Поводковые центры и патроны предназначены для передачи крутящего
момента обрабатываемым заготовкам. Для сокращения затрат времени на уста"
новку заготовок используют поводковые центры, одновременно центрирую"
щие заготовку с помощью торцовых зубьев, рифленых шайб или корпусов,
врезающихся в торец заготовки. Эти центры обеспечивают передачу больших
крутящих моментов. Переналадка для обработки другой заготовки осуществ"
ляется за счет смены зубчатых шайб.
Одна из конструкций поводкового центра, используемого на токарных стан"
ках, показана на рисунке 5.11. Такой центр относится к переналаживаемым
приспособлениям, предназначенным для обработки заготовок по групповому
методу. В корпус 1 центра запрессован посадочный палец 2, служащий базой
для установки сменной зубчатой коронки 6. Коронка закрепляется на корпусе
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
109
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
гайкой 5 и стопорится от поворота фик
сатором 4. Длина и диаметр зубчатой ко
ронки подбираются в зависимости от
длины и диаметра обрабатываемой за
готовки из расчета одновременного на
чала точения у разных деталей. Для точ
ной настройки служит промежуточное
кольцо 3, толщину которого подбирают
опытным путем. В дальнейшем его ме
няют вместе с коронкой. Диаметры об
Рис. 5.11
Поводковый центр
рабатываемых заготовок 55–75 мм. По
водковый центр позволяет переводить станок для обработки с одной заготовки
на другую без переналадки. Для смены достаточно сменить у центра зубчатую
коронку.
Применение центра со сменными коронками в 10–12 раз сокращает время
переналадки станка при обработке различных заготовок.
Для точной установки заготовок по длине используется поводковый патрон
с плавающим центром. Конструкция такого патрона показана на рисунке 5.12.
Поводковый патрон предназначен для закрепления заготовок типа валов при
обработке в центрах на токарных и шлифовальных станках.
Внутри корпуса 3 патрона скользит центр 9, подпружиненный пружиной
12. Малый диаметр корпуса выполнен в виде цанги с наружной конической
поверхностью на передней части. Снаружи малого диаметра корпуса располо
жена втулка 10, имеющая возможность перемещаться в осевом направлении.
В специальных пазах втулки закреплены зажимные кулачки 6, которые пово
рачиваются на осях 13. Эти кулачки подпружинены пружинами 5. Втулка с
зажимными кулачками удерживается на корпусе штифтом 11. Снаружи боль
шого диаметра корпуса расположено опорное кольцо 14, имеющее возможность
осевого перемещения и удерживаемое на корпусе с помощью винта 4. Опорное
кольцо подпружинено тарельчатой пружиной 2. В осевом направлении оно пе
ремещается за счет гайки 1. Зажимные кулачки 6 воздействуют на обрабаты
ваемую деталь 7, которая подпирается центром задней бабки 8.
Поводковый патрон работает следующим образом. В исходном положении
центр 9 и втулка 10 под действием пружины 12 выдвинуты из корпуса 3, а за
жимные кулачки 6 за счет пружины 5 раскрыты и готовы принять заготовку 7.
Для закрепления обрабатываемой заготовки ее подают в зону осей центров стан
ка, центрируют подпружиненным центром 9 и центром задней бабки 8.
Регулируемое усилие одного кулачка составляет до 15 кН. Диаметр зажи
маемой в кулачках заготовки от 20 до 50 мм. Диапазон смещения кулачков в
зажатом состоянии относительно центра 0,6 мм. Патрон позволяет обеспечить
постоянство базирования заготовок в осевом направлении за счет зажима под
пружиненного центра цанговыми лепестками корпуса; упростить переналадку
на другой диапазон обрабатываемых заготовок; обрабатывать тонкостенные
заготовки и заготовки с эксцентриситетом опорной поверхности относительно
центра.
Использование патрона на автоматизированных токарных станках с ЧПУ,
оснащенных гидравлическим или пневматическим подводом центра задней баб
110
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 5.12
Поводковый патрон
ки в комплексе с автооператорами или промышленными роботами, дает воз
можность полностью автоматизировать процесс установки и снятия заготовок
при обработке на станке.
Переналаживаемое приспособление (рис. 5.13) предназначено для токар
ной обработки угольников и тройников из поковок и штамповок с габаритными
размерами до 78 мм. Рекомендуется для применения в мелкосерийном произ
водстве.
В прямоугольных пазах планшайбы 4 приспособления крепятся верхний 6
и нижний 1 корпусы. В направляющих пазах верхнего корпуса установлена
подвижная призма 5 с винтом 7, а на нижнем корпусе — неподвижная приз
ма 3. На планшайбе закреплена линейка 2 с миллиметровой шкалой, нулевое
деление которой (точка отсчета) совпадает с центром планшайбы.
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
111
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 5.13
Токарное переналаживаемое приспособление
Приспособление устанавливают в самоцентрирующем трехкулачковом пат
роне токарновинторезного станка. Для обработки различных типоразмеров уголь
ников приспособление настраивают путем перемещения нижнего корпуса 1, а
затем заготовку зажимают винтом 7 через подвижную призму 5. Приспособле
ние позволяет значительно снизить трудоемкость обработки тройников, уголь
ников и улучшить качество деталей. Об
работка криволинейных поверхностей
при ручном управлении токарным стан
ком представляет собой сложную трудо
емкую операцию и не обеспечивает до
статочно высокую точность обработки.
Применение приспособлений позволяет
значительно снизить трудоемкость и по
высить качество обработки криволиней
ных поверхностей. Например, обработка
наружных шаровых поверхностей явля
ется одной из сложных токарных опера
ций и производится обычно специальны
ми резцами с частыми остановами и из
мерениями по шаблону. Такие резцы в
процессе обработки нередко вибрируют,
что отрицательно сказывается на шеро
ховатости поверхности.
Использование специального приспо
Рис. 5.14
собления (рис. 5.14) устраняет указан
Приспособление для обработки наруж
ные недостатки.
ной шаровой поверхности
112
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приспособление состоит из двух планок 1 и 2, которые болтом 3 крепят к
направляющим станины станка под патроном или под обрабатываемой заго
товкой. На этот болт ставят сменный копир 4 — диск того же радиуса, который
требуется получить. На суппорте станка впереди резцедержателя закрепляют
планку 6, которая с левой стороны имеет упор 5, а с правой — крепежные
болты 7. Проходной резец крепится как обычно в резцедержателе. Упором ка
саются копира, а резцом — заготовки. Затем двумя суппортами вручную или
продольным самоходом и поперечным вручную перемещают упор так, чтобы
он обкатывал копир. При этом резец повторяет движение упора. Когда обраба
тывают обратную сторону сферы со стороны патрона, планку 6 переворачивают
упором вправо, планки 1 и 2 соответственно переносят на правую сторону от
поперечного суппорта, и процесс происходит аналогично описанному выше.
Приспособление используют в единичном и серийном производстве, что позво
ляет повысить точность обработки и улучшить качество деталей.
Оправка для растачивания канавок с радиальной подачей резца (рис. 5.15)
применяется для обработки заготовок в серийном производстве на токарно
револьверном полуавтомате 1425.
Оправка состоит из корпуса 10 с цилиндрическим хвостовиком для закреп
ления в посадочном отверстии револьверной головки станка, корпуса 9, в пазу
которого движется ползун 7 с резцовой оправкой 1, закрепленной двумя винта
ми 12.
В корпусе 10 оправки запрессован клин 8, который своим скосом при посту
пательном движении заставляет перемещаться ползун с резцовой оправкой 1
на врезание. Крышка 2, закрепленная на станке 3, снабжена направляющим
выступом, входящим в отверстие обрабатываемой детали, и через шарикопод
шипник 4, закрепленный на неподвижной втулке 5, вращается вместе с обра
батываемой деталью. Ход резца 14 на врезание ограничивается диаметральным
выступом на втулке 6. После окончания обработки ползун с резцовой оправкой
Рис. 5.15
Оправка для растачивания канавок с радиальной подачей резца
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
113
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
возвращается в исходное положение под действием пружин 13 и 11. Данная
оправка позволяет значительно повысить производительность операции и мо
жет быть легко переналажена на другие размеры.
5.6. ПРИНЦИПЫ ПРОЕКТИРОВАНИЯ
ПРИСПОСОБЛЕНИЙ
ДЛЯ СТАНКОВ С ЧПУ И ГПМОДУЛЕЙ
В приспособлении для станков с программным управлением
предъявляют повышенные требования по точности и жесткости. Это вызвано
тем, что станки обеспечивают возможность обработки заготовок с высокой сте
пенью точности.
Технологический процесс обработки заготовок на станках с ЧПУ, проходя
щий при относительном перемещении заготовки и инструмента в системе зара
нее выбранных координат станка, требует точного определения положения за
готовки относительно системы координат установочных элементов приспособ
ления. Положение системы координат установочных элементов, в свою очередь,
должно быть выдержано относительно системы координат основной базы при
способления, совмещаемой с координатной системой станка.
Для большей эффективности использования станков с ЧПУ при малых пар
тиях обрабатываемых заготовок применяют быстропереналаживаемые зажим
ные устройства.
Для сокращения времени на переналадку станка применяют систему сбор
норазборных быстропереналаживаемых зажимных устройств (СРП), состоя
щих из унифицируемых крепежных элементов.
Наиболее широко на станках с ЧПУ используют универсальносборные при
способления. Применяют две системы УСП:
1) с Тобразными пазами;
2) с отверстиями (цилиндрическими и резьбовыми).
Элементы УСП для станков с ЧПУ обладают большей жесткостью и точно
стью, чем обычные элементы УСП для универсальных станков.
На станках с ЧПУ применяют также специализированные приспособле
ния, предназначенные для установки и закрепления групп заготовок, имеющих
одинаковые базовые поверхности. Они бывают регулируемые и наладочные.
Специальные приспособления находят применение на станках с ЧПУ в тех
случаях, когда невозможно применить другие виды приспособлений. Специ
альные приспособления делают упрощенной конструкцией и изготавливают
обычно на тех же станках, на которых они будут использоваться. Для базиро
вания и закрепления заготовок обычно используют универсальные устройства
и детали.
5.7. МЕХАНИЗАЦИЯ И АВТОМАТИЗАЦИЯ
ПРИСПОСОБЛЕНИЙ
Механизация и автоматизация являются одними из основных
направлений в проектировании приспособлений. Механизация и автоматиза
ция станочных приспособлений позволяют освободить рабочего от тяжелого
ручного труда, повышают производительность, облегчают труд, освобождают
114
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
значительное число рабочих. В зависимости от масштаба производства прово
дится частичная или полная автоматизация приспособлений.
Частично автоматизируют следующие приемы работы: загрузку заготовок
в рабочую зону приспособления; базирование заготовок, т. е. доведение их ба
зовых поверхностей до полного контакта с установочными элементами приспо
соблений; закрепление и открепление заготовок; вращение, фиксацию и креп
ление поворотных (или передвижных) частей приспособлений; съем и вытал
кивание заготовок после обработки; измерение заготовок в процессе обработки;
очистка от стружки.
В автоматических приспособлениях все приемы, начиная от загрузки и бази
рования, и кончая съемом обработанных заготовок, производятся без участия
рабочего. В полуавтоматических — автоматизируется только часть приемов.
Автоматизация приспособлений в большинстве случаев основана на приме
нении пневматических, пневмогидравлических, механических, электрических
и гидравлических приводов, управляемых через конечные выключатели, сер
возолотники, емкостные датчики и упоры перемещающимися рабочими орга
нами станка.
Автоматизация цикла работы станка, дополненная автоматизацией цикла
работы приспособления, позволяет превратить станки в полуавтоматы и авто
маты, а это, в свою очередь, обеспечивает значительное повышение производи
тельности труда и возможность многостаночного обслуживания. Поэтому ме
ханизация и автоматизация имеющегося на заводах парка станков является
мощным резервом повышения производительности труда.
В автоматизированных приспособлениях должна быть полностью исклю
чена возможность неправильной установки заготовки. Для этого применяют
блокировочные и предохранительные устройства, контрольные упоры (в авто
матических линиях), которые при неправильном положении заготовки оста
навливают станок.
На автоматических линиях используют приспособления стационарные и
приспособленияспутники.
Стационарные приспособления автоматических линий выполняют те же
функции, что и обычные приспособления. Их монтируют на отдельные агрега
ты автоматических линий. Отличительной чертой этих приспособлений явля
ется то, что они должны обеспечивать правильную установку заготовок при
простейших движениях транспортирующих устройств.
Приспособления автоматических линий должны быть надежными и безот
казными в работе. Поэтому в них часто предусматривают автоматический конт
роль правильного положения заготовки с помощью пневматических электри
ческих и других датчиков. Большое внимание уделяют автоматической очист
ке приспособления от стружки. Зажимное устройство должно быть надежным
и самотормозящим.
Большинство автоматических линий работают при базировании заготовки
по плоскости и двум цилиндрическим отверстиям. Так обрабатывают корпус
ные детали. Если заготовка не имеет таких баз, обрабатывают при установке в
приспособленииспутнике. Тогда это приспособлениеспутник базируют по плос
кости и двум отверстиям. При таком базировании выдвижные установочные
элементы (пальцы и фиксаторы) вызывают увеличение погрешности установки
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
115
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
заготовки. Поэтому к точности приспособлений для автоматических линий
предъявляют повышенные требования. Для повышения точности обработки
следует уделять большое внимание увеличению жесткости приспособления и
отсутствию или уменьшению деформации заготовки под действием сил зажима.
Приспособления%спутники применяют для обработки заготовок сложной
конфигурации. Все стадии обработки выполняют при одном закреплении заго%
товки, чем обеспечивается принцип постоянства установочных баз. В начале
линии на спутник устанавливают и закрепляют заготовку, в конце линии ее
открепляют и снимают, а спутник возвращают в исходное положение.
Перемещение приспособлений%спутников или обрабатываемых заготовок
по всем агрегатам автоматической линии производится при помощи шагового
или (реже) цепного конвейера.
5.8. КОМПЬЮТЕРНЫЕ ТЕХНОЛОГИИ
ПРОЕКТИРОВАНИЯ
ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКИ
Одним из наиболее перспективных направлений промышлен%
ного использования компьютерных технологий является появление систем
сквозного автоматизированного проектирования технологий обработки — CAD/
CAM/CAE/TDM.
Системы данного класса позволяют решать практически любую задачу по
технологическому проектированию (в том числе по проектированию техноло%
гической оснастки), машиностроительному черчению, геометрическому моде%
лированию, управлению производством, автоматизированному формированию
управляющих программ для обработки заготовок на станках с ЧПУ. При этом
резко сокращаются сроки проектирования и подготовки производства, обеспе%
чиваются современными требованиями к дизайну и качеству выпускаемых из%
делий. В этой связи одним из важных компонентов современного специалиста
является владение им компьютерными технологиями в своей области дея%
тельности.
Конструирование технологической оснастки в машиностроительном про%
изводстве составляет около 60% временных и стоимостных затрат подготовки
к выпуску нового изделия. Подготовка высококвалифицированных специали%
стов в области конструирования, расчета и производства технологической ос%
настки является актуальной задачей как для высшей школы, так и для произ%
водства.
Процесс проектирования любого изделия, будь то простейшее зажимное
устройство или сложное приспособление для станка с ЧПУ, как правило, раз%
бивается на несколько этапов в зависимости от его сложности:
· выбор типа и места расположения установочных элементов (базирование);
· определение места приложения сил резания, в соответствии с принятой
схемой обработки;
· выбор схемы закрепления заготовок и точек приложения сил закрепления;
· расчет точности приспособления;
· внесение необходимых корректив в схему базирования и закрепления заго%
товки;
116
Powered by TCPDF (www.tcpdf.org)
Глава 5
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
· компоновка сборочного чертежа приспособления;
· формирование рабочих чертежей (деталировка) — если это требуется;
· сборка и наладка приспособления.
В настоящее время с появлением CAD/CAM/CAE/TDM изменяется подход
к проектированию изделий и технологий. Общая схема проектной работы за#
ключается в создании геометрической модели изделия и решения с ее помо#
щью конструктивных, прочностных и других расчетов, разработке вопросов
дизайна, разработке управляющих программ для оборудования с ЧПУ, подго#
товке конструкторской и технологической документации.
Процесс проектирования технологической оснастки идет по похожей схеме:
проектируется модель изделия — проектируется модель оснастки (с использо#
ванием базы данных готовых элементов) — разрабатываются чертежи — проек#
тируется управляющая программа — разрабатывается технологический процесс.
Правила, команды и функции, используемые при построении модели объ#
екта, зависят от конкретной схемы, способы же моделирования, применяемые
в любой системе, могут быть следующими:
· каркасное моделирование (2D и 3D);
· поверхностное;
· твердотельное.
При использовании каркасного моделирования в базе данных системы со#
храняется, помимо общей информации, геометрическая информация и коор#
динатная. Этот метод позволяет построить модель любой сложности, хотя и
требует от конструктора определенных навыков и опыта.
При использовании твердотельного моделирования, наряду с координатно#
геометрической, сохраняется такая же информация о топологии модели объек#
та, т. е. о последовательности и параметрах используемых при построении ко#
манд и связи между собой элементов моделируемого объекта.
Гибридное моделирование объединяет рассматриваемые методы. При гиб#
ридном моделировании возможно использовать в одной сборке детали (а для
одной детали — элементы) построенные разными методами. Существует также
возможность преобразования построений модели (конструкции) или ее части
из одного представления в другое, что повышает гибкость и удобство работы.
В некоторых CAD/CAM/CAE/TDM используются специальные математи#
ческие методы, позволяющие при создании моделей объектов манипулировать
более примитивными (простейшими) моделями (операции сложения объектов,
вычитания объектов, объединения объектов).
Унификация и стандартизация станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
117
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
РАСЧЕТ И ПРОЕКТИРОВАНИЕ
ЗАЖИМНЫХ УСТРОЙСТВ
ПРИСПОСОБЛЕНИЙ
6.1. ОБЩИЕ ПРАВИЛА
ЗАКРЕПЛЕНИЯ ЗАГОТОВОК
В процессе обработки на заготовку действуют различные силы
и моменты: резания, массовые (вес заготовки, центробежные и инерционные),
силы зажима и реакции опор. Под влиянием этих сил в процессе обработки
заготовка должна находиться в равновесии. Равновесие заготовки рассматри"
вается в трех взаимно перпендикулярных плоскостях.
При закреплении заготовок должны соблюдаться условия:
· не должно нарушаться положение заготовки, достигнутое при базирова"
нии;
· закрепление должно быть надежным;
· силы закрепления не должны вызывать значительные деформации заго"
товки.
Эти условия могут быть обеспечены при определенном приложении силы
зажима по отношению к зажимным элементам приспособления [14], [16].
6.2. КЛАССИФИКАЦИЯ
ЗАЖИМНЫХ УСТРОЙСТВ
Зажимные устройства классифицируются по различным при"
знакам (рис. 6.1).
Все зажимные устройства подразделяются на три группы (рис. 6.2).
К первой группе (рис. 6.2а) относятся зажимные устройства, имеющие в
своем составе силовой механизм (СМ) и привод (П), который обеспечивает пере"
мещение контактного элемента (К) и создает исходное усилие W, преобразуе"
мое силовым механизмом в зажимное усилие Q. В качестве приводов использу"
ются: пневматические, гидравлические, пневмогидравлические и др. Такие
зажимные устройства применяются как в мелкосерийном и серийном произ"
водствах, так и в мелкосерийном многономенклатурном производстве.
Во вторую группу (рис. 6.2б) входят зажимные устройства, состоящие лишь
из силового механизма, который приводится в действие непосредственно рабо"
чим, прилагающим исходное усилие Wp на плече l. Эти устройства называются
ручными и применяются в единичном и мелкосерийном производствах.
118
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 6.1
Классификация зажимных устройств
Рис. 6.2
Схемы зажимных устройств
К третьей группе (рис. 6.2в) относятся зажимные устройства, которые в
своем составе не имеют силового механизма, а усилие Q создается либо избы
точным атмосферным давлением, либо магнитными силами. Эти устройства
применяются для плоских, хорошо обработанных базовых поверхностей заго
товок всех типов производств.
6.3. РАСЧЕТ ЗАЖИМНЫХ УСТРОЙСТВ
6.3.1. ОПРЕДЕЛЕНИЕ СИЛ И МОМЕНТОВ РЕЗАНИЯ
Действующие на заготовку в процессе обработки силы и момен
ты резания рассчитываются применительно к конкретному виду обработки.
При токарной обработке силу резания, действующую на заготовку, приня
то представлять в виде трех составляющих (рис. 6.3), определяемых по форму
ле [28], [30]
Pz ( Py , Px ) 1 Cp 2 tx p 2 S y p 2 V np 2 K p ,
где Cp — коэффициент, зависящий от свойств материалов заготовки и резца;
t — глубина резания, мм; S — подача, мм/об; V — скорость резания, м/мин;
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
119
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Kp — коэффициент, зависящий от углов ин
струмента, K p = KM p ⋅ Kϕ p ⋅ Kγ p ⋅ Kα p ⋅ Krp .
Значения Cp, Kp, Xp, Yp, np выбирают по
таблицам П.1–П.4.
При обработке сверлами и зенкерами на
заготовку со стороны инструмента действу
ют осевая сила Po и момент от сил резания
M, которые рассчитываются по формулам
[10], [30]:
Рис. 6.3
Составляющие силы резания,
действующие на заготовку при
точении
· при сверлении
Po 1 Cp 2 D q p 2 S y p 2 K p ;
M 1 CM 2 D qm 2 S yM 2 K p ;
· при рассверливании и зенкеровании
Po 1 Cp 2 D q p 2 t xp 2 S y p 2 K p ;
M 1 CM 2 D qm 2 t xM 2 S yM 2 K p ,
где Po — осевая сила резания, Н; M — крутящий момент, Н×м; t — глубина
резания, мм; S — подача, мм/об. При этом принимают, что при рассверлива
нии и зенкеровании t = 0,5(D – d), где D и d — диаметры отверстия после и до
обработки, мм. Значения постоянных и показателей степеней выбираются по
таблице П.5.
При фрезеровании действие фрезы на заготовку принято оценивать тремя
составляющими силы резания, одна из которых направлена вдоль направле
ния подачи (Pн), другая направлена вдоль оси фрезы (Pо), а третья (Pv) перпен
дикулярна двум предыдущим и направлена либо в сторону приспособления,
либо в сторону фрезы (при встречном цилиндрическом фрезеровании) (рис. 6.4).
Все три составляющие принято оценивать в долях от окружной силы Pz, кото
рая определяется по формуле [30]
y
Pz 2
C p 1 tx p 1 Sz p 1 Z 1 Bu p
Рис. 6.4
Силы, действующие на заготовку:
а — при встречном цилиндрическом фрезеро
вании; б — при попутном цилиндрическом фре
зеровании; в — при торцовом фрезеровании;
1 — обрабатываемая заготовка; 2 — фреза.
120
Powered by TCPDF (www.tcpdf.org)
,
Dq p
где Pz — окружная сила резания, Н; t и
B — глубина и ширина фрезерования,
мм; Sz — подача на зуб фрезы, мм/зуб;
Z — число зубьев фрезы; D — диаметр
фрезы, мм.
Формулы для определения Pz для
различных видов фрезерования и зна
чения Cp приведены в таблицах 6.1 и
6.2. Коэффициент Cp и показатели сте
пени xp, yp, up и qp приведены в табли
це П.6.
Выбор t и B зависит от вида фрезе
рования (рис. 6.5). Значения составляю
щих сил Pн, Pv и Po в долях от Pz приве
дены в таблице 6.3.
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
1234567896 82 3 9 6
37 478
4 368
4
8235 28678128 383 32 8
2 83 8
12324562789 28 2
3
74 2
6 4
4 986
35 8688
Cp ⋅ t0,86 ⋅ B ⋅ Z ⋅ Sz0,72 ⋅ D −0,86
4 88
6 88
Cp ⋅ t0,95 ⋅ B1,1 ⋅ Z ⋅ Sz0,8 ⋅ D −1,1
29
Cp ⋅ t0,86 ⋅ B ⋅ Z ⋅ Sz0,72 ⋅ D −0,86
8 6 6848 2 6848
3 8
Cp ⋅ t0,86 ⋅ B ⋅ Z ⋅ Sz0,72 ⋅ D −0,86
9 448 3 638
Cp ⋅ t0,86 ⋅ B ⋅ Z ⋅ Sz0,72 ⋅ D −0,86
12324562789 28 2
Cp ⋅ t0,83 ⋅ B ⋅ Z ⋅ Sz0,65 ⋅ D −0,83
4 88
Cp ⋅ t0,9 ⋅ B1,14 ⋅ Z ⋅ Sz0,72 ⋅ D −0,14
6 88
29
Cp ⋅ t0,83 ⋅ B ⋅ Z ⋅ Sz0,65 ⋅ D −0,83
8 6 6848 2 6848
1 2 3 4 5 6 2 7 89 7
12345265789
3652932657 57
6 652 3712767 55932667
37
2789867
9237
2757
6 88
29
3 8
!
!
!
"#9 448 3$ 6$38
!
!
!
12324562789 28 2
4 88
8 6 6848 2 6848
1 2 3 4 5 6 2 7 89 7
12345267896 812 8128681 8 8 788138
783 6428 6 855 32678
118
118
128
123345627894 596 4 94
423345627894 5647894 596 4 94
423345627894 95894 596 4 94
5647894 228627494
1 !"2
1 !"2
6855 32678
#95894 228627494
5 25$ 2 % &9 8'98' 2859 9( '8' 2 )64*+$
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
121
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 6.5
Схемы для определения t и B при различных видах фрезерования
122
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
6.3.2. СОСТАВЛЕНИЕ РАСЧЕТНОЙ СХЕМЫ
ДЛЯ ОПРЕДЕЛЕНИЯ СИЛЫ ЗАЖИМА Q
И ИСХОДНОГО УСИЛИЯ W
Величину силы зажима Q определяют на основе решения уравнений стати
ки, рассматривая равновесие заготовки под действием приложенных к ней сил
и моментов.
Расчетную схему для вывода уравнения статики составляют для наиболее
неблагоприятного расположения режущего инструмента по длине обрабаты
ваемой поверхности.
При составлении расчетной схемы важное значение приобретает правиль
ный выбор направления и места приложения силы зажима.
При выборе направления силы зажима следует руководствоваться следую
щим:
· сила зажима должна быть направлена по возможности перпендикулярно к
плоскостям установочных элементов;
· при базировании сила зажима должна быть направлена к тому установоч
ному элементу, с которым заготовка имеет наибольшую площадь контакта.
При выборе места приложения силы зажима следует придерживаться пра
вил:
· сила зажима не должна приводить к опрокидыванию заготовки или ее сдвигу
по установочным элементам;
· действие сил зажима и вызываемых ими реакций опор не должно приво
дить к созданию изгибающих моментов, которые отрицательно сказывают
ся на точности обработки;
· точка приложения силы зажима должна быть как можно ближе к месту
обработки.
На основании решения уравнений статики получают формулы для расчета
зажимного усилия Q, обеспечивающего надежное закрепление заготовки.
Ниже приведены примеры составления расчетных схем для определения
силы зажима Q с необходимыми комментариями.
Пример 6.1. Здесь необходимо рассмотреть два варианта.
Сила P1 стремится оторвать заготовку от нижних опор. Этому препятствует
сила зажима:
Q > P1; Q = k × P1,
где k — коэффициент надежности.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
123
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Сила P2 стремится сдвинуть заготовку от боковой опоры. Этому препятству
ют силы трения F1 и F2:
F1 + F2 > P2;
F1 = Q × f1;
F1 + F2 = k × P2;
(1)
F2 = (Q – P1) × f2,
где F2 — суммарная сила трения, возникающая в местах контакта заготовки и
нижних опор.
Подставив значения F1 и F2 в формулу (1), получим
Q × f1 + (Q – P1) × f2 = k × P2.
Отсюда
Q3
k 1 P2 2 P1 1 f2
.
f1 2 f2
В качестве расчетной выбирается наибольшее значение Q из двух вариантов.
Пример 6.2. Данная схема отличается от предыдущей тем, что сила P1 на
правлена в противоположную сторону, в результате чего формула для расчета
Q принимает вид:
k 1 P2 2 P1 1 f2
Q3
.
f1 4 f2
Пример 6.3. Данная схема характерна для встречного фрезерования плос
кости дисковыми фрезами. Моменты от сил P1 и P2 стремятся повернуть заго
товку относительно боковой опоры. Этому должны противодействовать момен
ты от силы зажима Q и силы трения F1 в месте приложения силы зажима:
124
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
P1 × l + P2 × a < Q × b + F × l;
k × (P1 × l + P2 × a) = Q × b + Q × f1 × l.
Отсюда
Q3
k 1 ( P1 1 l 2 P2 1 a)
.
b 2 f1 1 l
Пример 6.4. Схема соответствует закреплению заготовки в самоцентрирую
щем патроне или в цанге.
На цилиндрическую заготовку воздействует момент от сил резания M и
осевая сила P.
Здесь необходимо рассмотреть два варианта.
Сила трения F1 достаточна для компенсации силы P:
F1 > P; F1 = k × P;
3 × Q × f1 = k × P,
где f1 — коэффициент трения в осевом направлении. В этом случае момент от
силы трения торца заготовки о патрон отсутствует.
Тогда
F2 1 r 2 k 1 M;
3 1 Q 1 f2 1 r 2 k 1 M;
k1M
k1P
Q2
; Q3
,
3 1 f2 1 r
3 1 f1
где f2 — коэффициент трения в тангенциальном направлении.
Сила трения F1 недостаточна для компенсации силы P. В этом случае торец
заготовки будет соприкасаться с торцом патрона. Между заготовкой и торцом
возникнет сила трения, момент от которой будет противодействовать моменту M.
В этом случае
k × M = 3 × Q × f2 × r + (P – 3 × Q × f1) × f3 × rср,
где rср = r/2; f3 — коэффициент трения между торцом заготовки и торцом па
трона.
Отсюда
k 1 M 2 P 1 f3 1 rср
Q3
;
3 1 f2 1 r 2 3 1 f1 1 f3 1 rср
Q3
k 1 M 4 P 1 f2 1 rср
;
3 1 f1 1 r 4 3 1 f1 1 f2 1 rср
Q5
k1P
.
3 1 f1
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
125
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Пример 6.5. Данная схема реализуется при сверлении центрального отвер
стия с центрированием по пальцу и упором на штыри. В этом случае момент от
силы резания M компенсируется моментом от силы трения в опорах и в местах
контакта зажимного устройства:
k × M = Q × f1 × R1 + (Q + Po) × f2 × R2.
Отсюда
Q3
k 1 M 2 Po 1 f2 1 R2
.
f1 1 R1 4 f2 1 R2
Пример 6.6. Данная схема реализуется при сверлении осевых отверстий
при установке заготовки на пяту. В этом случае момент от силы резания M
компенсируется моментом от сил трения в пяте и в местах контакта зажимного
устройства:
k 1 M 2 F1 1 R1 3 F2 1 rпр 2 Q 1 f1 1 R1 3 (Q 3 Po ) 1 f2 1 rпр ,
где
rпр 2
126
Powered by TCPDF (www.tcpdf.org)
1 ( D3 1 d3 )
.
3 D2 1 d2
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Отсюда Q будет равна:
Q3
k 1 M 2 Po 1 f2 1 rпр
.
f1 1 r1 4 f2 1 rпр
Пример 6.7. Схема соответствует одновременному сверлению отверстий в
торце заготовки сверлильной головкой на агрегатном станке.
n
В случае, когда сила трения F3 1 3 k 2 Po (F3 = f1 × Q), можно считать, что
1
трение между торцом заготовки и призмой отсутствует (F4 = 0). В этом случае
n
суммарный момент от сил резания
1M
должен быть уравновешен моментами
1
от сил трения F1 и F2:
F1 1 R1 2 F2 1 R1 3 k 1
n
M;
1
F1 3 f1 1 Q;
F2 3
k1
Q3
Q 1 f2
;
sin(4 /2)
n
M
1
f2
5
6
R1 1 7 f1 2
sin(4 /2) 8
9
,
где n — количество одновременно обрабатываемых отверстий.
n
В случае, когда сила трения F3 1 3 k 2 Po , в месте контакта заготовки и приз$
1
1 n
2
мы возникает сила трения F4 3 6 k 4 Po 5 F3 7 f4 , вызывающая момент на плече
8 1
9
R2, препятствующий проворачиванию заготовки.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
127
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
В этом случае уравнение статики примет вид:
n
1 n
2
F1 3 R1 4 F2 3 R1 4 7 k 3 Po 5 F3 8 3 f4 3 R2 6 k 3 M;
9 1
1
n
Q 3 f2
3 R 4 R2 3 k 3 Po 3 f4 5 f1 3 Q 3 R2 3 f4 6 k 3
f1 3 Q 3 R1 4
sin( /2) 1
1
k3
Q6
n
1
M 5 R2 3
n
n
M;
1
k 3 Po 3 f4
1
f2
1
2
R1 3 7 f1 4
5 f 3R 3f
sin(
/2) 8 1 2 4
9
.
Пример 6.8. Эта схема соответствует фрезерованию шпоночного паза кон
цевой фрезой.
Сила Pн стремится сдвинуть заготовку вдоль оси, оторвав ее от правой опо
ры. Этому препятствуют силы трения, возникающие между заготовкой и гра
нями призмы, а также в месте контакта зажимного устройства и заготовки.
F1 1 F2 2 k 3 Pн ;
f 3Q
F1 2 f1 3 N 2 1
;
sin(4 /2)
F2 2 f2 3 Q.
Отсюда
Q2
k 1 Pн
.
f1
3 f2
sin(4 /2)
Пример 6.9. Данная схема соответствует фрезерованию шпоночного паза
прямозубой дисковой фрезой.
128
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Сила Pн стремится сдвинуть заготовку влево, отрывая ее от опоры, а сила Pv
отрывает заготовку от граней призмы. Этому препятствуют силы трения F1, F2
и сила зажима Q:
F1 1 F2 2 k 3 Pн ;
f 3 (Q 4 Pv )
F1 2 f1 3 N 2 1
;
sin(5 /2)
F2 2 f2 3 Q.
Отсюда
Q4
k 1 Pн 2
f1 Pv
sin(3 /2)
f1
2f
sin(3 /2) 2
.
Пример 6.10. При сверлении радиальных отверстий в заготовке, установ"
ленной в призме, возникает тангенциальная сила, вызывающая момент, стре"
мящийся повернуть заготовку вокруг собственной оси. Эта сила вызвана сле"
дующими причинами [14].
1. В начальный момент сверления, в течение всего времени входа режущих
кромок в металл, их длина в нем различна, так как направление движения шпин"
деля не является строго перпендикулярным к плоскости стола. ГОСТ 370"81
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
129
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ограничивает отклонение перпендикулярности оси шпинделя к рабочей по
верхности стола, равным 0,1 мм на длине 300 мм. В результате на каждой ре
жущей кромке возникают различные силы резания, что вызывает тангенци
альную силу PT1 .
2. Тангенциальная сила обусловлена также неравенством углов j1 и j2 при
вершине сверла. По ГОСТ 203464 допуск на угол при вершине сверла равен
±2°. Такая погрешность приводит к тому, что длины режущих кромок сверла
становятся неодинаковыми, что вызывает появление дополнительной танген
циальной силы PT2 .
3. По ГОСТ 203464 определяется прогиб сверла для разных диаметров и
длин сверл. Изгиб сверла вызывает его биение, что приводит к разбивке отвер
стия, и в определенный момент времени сверло работает одной кромкой. При
этом возникает тангенциальная сила PT3 . Суммарная тангенциальная сила бу
дет равна:
PT 1 PT1 2 PT2 2 PT3 .
Рис. 6.6
Зависимость тангенциальной силы от
диаметра сверла (сталь 45)
Расчетные схемы и формулы для оп
ределения PT1 , PT2 и PT3 приведены в ра
боте [16]. Здесь же приведен график для
определения силы PT в зависимости от
диаметра сверла при обработке стали 45.
Этот график воспроизведен на рисун
ке 6.6. Им можно в первом приближе
нии пользоваться в курсовом и диплом
ном проектировании при определении
тангенциальной силы при сверлении раз
личных марок конструкционных и низ
колегированных сталей и чугунов.
В этом случае сила PT вызывает мо
мент M = PT × R, стремящийся повер
нуть заготовку вокруг собственной оси.
Моменту от тангенциальной силы PT
препятствует момент от сил трения в
местах контакта заготовки с гранями
призмы и зажимным механизмом.
PT 1 R 1 k 2 F1 1 R 3 F2 1 R;
PT 1 R 1 k 2 f1 1 Q 1 R 3 N 1 f2 1 R;
Q 3 Po
PT 1 R 1 k 2 f1 1 Q 1 R 3
1 f 1 R.
sin(4 /2) 2
Отсюда
Q=
130
Powered by TCPDF (www.tcpdf.org)
Po ⋅ f2
sin(α /2)
.
f2
f1 +
sin(α /2)
PT ⋅ k −
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Пример 6.11. При сверлении радиального отверстия в заготовке, установ
ленной в призме, момент M от сил резания уравновешивается моментами от
сил P1 и P2 реакций опор на плечах l1 и l2 в горизонтальной плоскости.
L
M 1 P1 2 l1 3 P2 2 l2 1 ( P1 3 P2 ) .
2
Момент M стремится повернуть заготовку вокруг оси сверла. Вследствие
наклонного расположения граней призмы в опорах возникают вертикальные
силы Py1 и Py2 , которые воспринимаются сверлом и приводом станка. С целью
разгрузки сверла и привода от сил Py1 и Py2 они должны быть компенсированы
силой зажима. Для определения силы Py1 спроецируем все силы на грань приз
мы (сечение А–А).
Py1 1 cos 2 3 F 3 P1 1 sin 2 4 0,
где F 1 N 2 f 1
призмы.
Отсюда
P1
2 f; f — коэффициент трения между заготовкой и опорой
cos 3
Py1 6
P1
f
cos 2 6 P 1 4 tg 2 3 f 5.
8
1 7
cos 2
cos2 2
9
P1 1 sin 2 3
Аналогично для сечения В–В:
f 2
Py2 3 P2 4 17 tg 5 6
8.
cos2 5
9
Результирующая сила, нагружающая сверло в направлении оси, связанная
с моментом от сверления, будет равна
f 2
f 2 M
1
Py 3 Py1 4 Py2 3 17 tg 5 4
8 6 ( P1 4 P2 ) 3 7 tg 5 4
86 .
cos2 5
cos2 5 L
9
9
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
131
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
С учетом коэффициента надежности закрепления сила зажима, необходи
мая для компенсации силы Py, будут определяться по формуле
f 3 k1M
.
Q 4 k 1 Py 4 27 tg 5 6
81
L
cos2 5
9
Для призмы с углом 2a = 90°
Q 2 (1 3 2 1 f ) 1
k1M
.
L
6.3.3. ВЫБОР ЗНАЧЕНИЙ КОЭФФИЦИЕНТОВ ТРЕНИЯ
Исследованиями установлено, что при контакте обработанных поверхно
стей заготовок с установочными элементами приспособлений коэффициент ста
тического трения f зависит от шероховатости поверхностей заготовок, их мате
риала, давлений и наличия смазки и пр. Для практических расчетов сил зажи
ма значение коэффициентов трения можно принимать по таблице 6.4.
1 2 3 4 5 6 2 7 89 7
1234526789
6 652385267818
3395669689 239668 52 58
12345265818
1234256477489 5 3 75694565 9576463 6996475 579
7649 3 552 796 495 537 9 4679
9
5234256477 9 5 3 75694565 9576463!6995 5379
467499"6389974 779 5 3 75689
#9
5234256477 9 5 3 75694565 9576463!6995 5379
"638959$ 3 5955 599 359
#%9
5234256477 9245 9 5 3 75694565 95 344!689
9 5 3 756896475 575&4'7 9 765 9
(449 349)474*9 !+9 5 3 756,9
4-!9
95)
9
3
9
..9
9474 49
7-8379474 49
956393$ 789
%9
/9
#9
1
6.3.4. РАСЧЕТ КОЭФФИЦИЕНТА НАДЕЖНОСТИ ЗАКРЕПЛЕНИЯ
Для обеспечения надежности зажима в силовых расчетах силы (моменты),
возникающие при обработке, увеличиваются на коэффициент надежности (за
паса) k, который определяется в зависимости от условий обработки по приве
денным ниже данным. С помощью этого коэффициента учитывают изменение
условий в процессе обработки: затупление инструмента и связанное с ним уве
личение силы резания, неравномерность припусков и неоднородность свойств
обрабатываемого материала, изменение условий установки заготовок.
132
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Коэффициент надежности определяется по формуле
k = k 0 × k1 × k2 × k3 × k4 × k5 × k 6 .
Гарантированный коэффициент запаса k0 принимается в пределах 1,2–1,5.
Значения коэффициента k1, учитывающего возрастание сил резания при зату$
плении инструмента для различных материалов и условий обработки, приведе$
ны в таблице 6.5.
1 2 3 4 5 6 2 7 89 7
1234526789
68 3 968
2
7 9
2 274 2 2 7 9
6 652 818
25286 8
5678
118
123456789
9
49
5979
9
9! 2! "9
123456789
49
5979
123456789
! 4 9
! 2 7 9
9
9
49
5979
9
2 274 9
4 7 979247 7 9
7
7
7
! 4 9
4 7 979247 7 9
7
7
.77 27 ! 9
2 274 9
79 ! 4 92 2 7 9
!23/ 5979 9
0 21 9
2 274 79 ! 4 !23/ 59
4 17 5"9
79 9
27 7 9
!23/ 5979 9
2 457 7 9
792 759 9
9
92 2 7 9
9
9
9
&9
497933 9
#33 $9 2797 9
7 423
49 9
2 79%9 9
89
#33 $9 2797 9
7 423
49 9
2 79&'(&)9 9
89
479
#33 $9
*9
479
9
#33 $9
+9
479
9
#33 $9
&9
479
&%9
#33 $9
&%9
479
*9
#33 $9
&9
479
9
#33 $9
+()9
,595!7-94 89
(*9
,594 2$-94 89
7933 9
+()9
,595!7-94 89
(*9
,594 2$-94 89
7933 9
(9
49
%%9
49
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
33358
35638
133
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Коэффициент k2, учитывающий колебание силы резания изза погрешно
стей размера припуска заготовок, принимают равным:
· 1,2 — для предварительной обработки;
· 1,0 — для окончательной обработки.
Значения остальных коэффициентов приведены в таблице 6.6.
Если в результате расчетов коэффициент k окажется меньше 2,5, то он при
нимается равным 2,5 (ГОСТ 12.2.02977).
1 2 3 4 5 6 2 7 8987
1234526789
6 6528
4
7
6 652 818181818
39 8463589
6 652 8
8
8 4847 84
678467 789 47 884
6 9 9 48
! 4884
4
%9 6 &4 $9476 84
7# 9 #447 48 4
97 94
-7
67 9&48.4 7 9 4
94# 9#94! 9 #844 6 7 84
) 98248 ,+,4$ &*,4 6 7.4
,46 7 9&4/ 89 949 &# 4
6784 8 884#79+ ! 4 924
97 + ! 46 7 9&4! 9 #04
123452658
12345467849
884
1245467847 7 884
1245447
97 94
48 4
12"45446 98 #84
84!878 #8497 94
12"4546784 $ 476 84 48 47# 9#84
884
123454678486
4!4
9#
847# 9#84'4("14
12"4544 6 7 ! 4) 94
4$ &* 46 +&,4# 9#94
124544 6 7 ! 4) 924
8 ,+ ! 4 !7 8
,4
6 7 9&4# 9#944! 9 # 4
6.4. ВЫБОР ТИПА ЗАЖИМНОГО УСТРОЙСТВА
И СИЛОВОГО МЕХАНИЗМА.
ОПРЕДЕЛЕНИЕ НЕОБХОДИМОГО
ИСХОДНОГО УСИЛИЯ
При расчете силовых механизмов в местах контакта заготовки
с зажимными элементами приспособлений возникает сила трения [16].
Из механики известно, что если те
ло 1 (рис. 6.7), нагруженное нормаль
ной силой N, под действием силы Q рав
номерно перемещается на плоскости, то
при наличии силы трения F полная ре
акция R отклоняется от направления
нормали навстречу движения на неко
торый угол j, называемый углом трения.
Из рисунка 6.7 находим
Рис. 6.7
Схема образования угла трения
tgj = F/N.
134
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Так как коэффициент трения скольжения f также выражается формулой
tg 1 2
то
F
,
N
tgj = f; j = arctgf.
Замена коэффициента трения тангенсом угла трения облегчает вывод фор"
мул для определения сил зажима и условий самоторможения механизмов, ос"
нованных на действии клина.
После определения силы зажима Q выбирается тип зажимного устройства.
Для серийного производства зажимной механизм может быть первой (рис. 6.2а)
или третьей (рис. 6.2в) групп. Рассмотрим подробнее зажимные устройства пер"
вой группы, содержащие силовой механизм (СМ) и привод (П) (механогидрав"
лический, пневматический, гидравлический, пневмогидравлический). Силовые
механизмы обычно выполняют роль усилителя с коэффициентом усиления i,
равным отношению силы зажима Q к исходному усилию W, создаваемому при"
водом: i = Q/Pи.
Наряду с изменением величины исходного усилия силовой механизм мо"
жет также изменять его направление и разлагать на составляющие. Иногда
силовые механизмы выполняют роль самотормозящих устройств.
Для приспособлений с зажимными устройствами первой группы силовой
механизм выбирается совместно с приводом для рационального согласования
коэффициента усиления i с исходным усилием W для получения минимальных
габаритных размеров устройства.
Зажимные устройства подразделяются на обычные и самоцентрирующие.
Первые не участвуют в базировании, а осуществляют только закрепление заго"
товок. Вторые осуществляют как базирование, так и закрепление заготовок.
6.4.1. ОБЫЧНЫЕ ЗАЖИМНЫЕ УСТРОЙСТВА
Обычные зажимные устройства подразделяются на простые и комбиниро"
ванные силовые механизмы. К ним относятся клиновые, клиноплунжерные,
рычажные и рычажно"шарнирные механизмы.
В таблицах 6.7 и 6.8 приведены схемы и формулы по расчету исходного
усилия W и передаточного отношения i для наиболее часто применяемых в
серийном и крупно"серийном производствах простых и комбинированных си"
ловых механизмов.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
135
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
1234567859
899 55579199299
5 29 527 29
36893 89 527
1234567859
9
89
18427859 527 89
1233
l1 1 l2
3 Q;
l1 3 4
3
l
i 2 1 34
l1 1 l2
W2
3
423
l1
3 Q;
(l1 1 l2 ) 3 4
3
l 1l
i 2 1 2 34
l1
W2
3
523
l2
3 Q;
l1 3 4
3
l
i 2 1 34
l2
W2
3
7 85997 75 7859 527 89
623
W 2 [tg(5 1 6) 1 tg 61 ] 3 Q;
3
1
i2
tg(5 1 6) 1 tg 61
3
136
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
1234564325789456
5
5 3 73646
123
W 1 [tg(2 3 4) 3 tg 41пр ] 5 Q;
i1
1
tg(2 3 4) 3 tg 41пр
3
3
423
tg(2 3 4) 3 tg 41
5 Q;
1 6 tg 42 5 tg(2 3 4)
3
1 6 tg 42 5 tg(2 3 4)
i1
tg(2 3 4) 3 tg 41
W1
3
523
W1
tg(2 3 4пр ) 3 tg 41
5 Q;
1 6 tg(2 3 4пр ) 5 tg 42
i1
1 6 tg(2 3 4пр ) 5 tg 42
tg(2 3 4пр ) 3 tg 41
3
3
3 877 3363873 73 363 77 3 87 73 2363
1297 8923 363789
3 7 3 4363 3 73 3 7 3 3 73 3 773 33 !"43#33#3$%&'
)3
$%&1(34&363 3 73 37 3373 8 33 !"4&3#33#3$%&'$%&1(343637
3 73 37 3373 7 3 !"43#3 *((34+363 3 73 3 33
73 8 33 !"4+3#33#3$%&'$%&1(37363,-.3 73#3$%/1'$%01(23-7 ) 3317 34253 1 2 3
732872 38 8 483 3 317342/23
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
137
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
1234567859
899 5557919929
7
277893 89 527
5 29 527 29
1234567859
9
89
123
l2 cos 1
3
3 Q;
l1 cos 11
3
l cos 11
i2 13
34
l2 cos 1
W2
3
423
W2
tg(5 6 7пр ) 6 tg 71 l2 1
3 3 3 Q;
1 8 tg(5 6 7пр )
l1 4
i2
1 8 tg(5 6 7пр )
l
3 1 34
tg(5 6 7пр ) 6 tg 71 l2
3
3
523
1
W 2 2 3 tg(1 6 9) 3 tg 11 3 3 Q;
4
3
1
1
34
i2 3
2 tg(1 6 9) 3 tg 11
3
623
[tg(1 6 9) 6 tg 71 ] l2
3 3 Q;
4
l1
3
l1
i2
l2 3 [tg(1 6 9) 6 tg 71 ]
W2
3
138
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
1234564325789456
5
5 3 73646
123
[tg(1 2 3) 2 tg 41пр ] l2
6 6 Q;
7
l1
3
l1
i5
67
l2 6 [tg(1 2 3) 2 tg 41пр ]
W5
3
423
2 6 tg(1 2 3) l2
6 6 Q;
l1
7
3
l
7
i5
6 1
2 6 tg(1 2 3) l2
W5
3
523
2 6 tg(1 2 3) l2
6 6 Q;
7
l1
3
7
l
i5
6 1
2 6 tg(1 2 3) l2
W5
3
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
139
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
1234564325789456
5
5 3 73646
123
2 1 tg(2 3 4)
1 Q;
3 1 l0
1 tg(2 3 4) 1 tg 72
a
3
3 1 l0
16
1 tg(2 3 4) 1 tg 72
a
i5
2 1 tg(2 3 4)
W5
16
3
Примечания. q и q1 — углы между плечами рычага и направлением действия силы; b —
дополнительный угол к углу q, который учитывает потери на трение скольжения в шарнирах,
d
1 2 arcsin f 2 13.
L
6.4.2. САМОЦЕНТРИРУЮЩИЕ ЗАЖИМНЫЕ МЕХАНИЗМЫ
Самоцентрирующие зажимные механизмы — это такие механизмы, кото
рые одновременно осуществляют базирование и закрепление заготовок. Разно
видностью самоцентрирующих устройств являются центрирующие зажимы,
которые центрируют и закрепляют заготовки по наружным и внутренним ци
линдрическим поверхностям. К ним относят цанги, разжимные оправки, ме
ханизмы с гидропластом, гофрированными втулками, тарельчатыми (пластин
чатыми) пружинами и мембранами.
ЦАНГОВЫЕ ЗАЖИМЫ
Основой цанговых зажимов являются цанги, представляющие собой раз
резные пружинящие гильзы. Они используются для центрирования и закреп
ления заготовок по наружной цилиндрической поверхности, обработанной по
6–9м квалитетам. Точностью центрирования составляет 0,02–0,06 мм. Цанги
выполняют из высокоуглеродистых и легированных сталей, закаленных до твер
дости HRC 58–62. Угол a конуса цанг составляет 30–40° для избежания закли
нивания. Наиболее распространенные цанги содержат три или четыре лепестка.
Цанговые зажимы работают на растяжение (рис. 6.8) или на сжатие (рис. 6.9).
Рис. 6.8
Рис. 6.9
Схема цангового зажима, работающего
на растяжение
Схема цангового зажима, работающего
на сжатие
140
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Расчет цанг сводится к следующему. Исходное усилие W, необходимое для
затяжки цанг, находится по формуле
W = (Q + Q¢)tg(a/2 + j),
где Q — сила зажима заготовки; Q¢ — сила сжатия лепестков цанги; j — угол
трения между цангой и втулкой.
Сила Q¢ определяется по формулам [16] (для стали с модулем упругости
E = 2,2×105 МПа):
· для трехлепестковой цанги
Q3 4 6 2 103
1 2 D3 2 S
(H);
l3
· для четырехлепестковой цанги
Q1 3 2 2 103
1 2 D3 2 S
(H),
l3
где S — толщина стенки лепестка, мм; d — диаметральный зазор между цангой
и заготовкой, мм (выбирается по табл. П.7), d = 0,3–0,5 мм; l — длина лепестка
от места задела до середины конуса, мм.
Коэффициент усиления i цангового зажима:
i3
Q 2 Q1
1
3
.
Pи
tg(4 /2 2 5)
МЕХАНИЗМЫ С РАЗЖИМНЫМИ ОПРАВКАМИ
Разжимные оправки (ГОСТ 16211B70, ГОСТ 16212B70, ГОСТ 16213B70) обесB
печивают центрирование и зажим заготовок по внутренним цилиндрическим и
коническим поверхностям, обработанным с допуском по 6–9 (12) квалитетам,
и используются в токарных и круглошлифовальных станках.
Конструкции таких оправок весьма разнообразны и приведены в различB
ной учебной и справочной литературе [5]–[7], [9], [11], [14], [16]. Рассмотрим
схемы некоторых наиболее часто встречающихся конструкций.
Оправка консольная с разрезной втулкой (рис. 6.10).
Формула для расчета исходного усилия W:
W = Q × [(tga/2 + j) + f],
где j — угол трения между втулкой 1 и
оправкой 2 (j » 5–6°); f — коэффициент
трения в месте контакта оправки и загоB
товки; f = 0,10–0,20; a — угол конуса
оправки; a = 60°.
Коэффициент усиления i оправки:
i1
Q
1
1
.
W (tg 2 /2 3 4) 3 f
Точность центрирования оправки равB
на 0,05–0,1 мм.
Рис. 6.10
Схема оправки с разрезной втулкой
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
141
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Оправка консольная с прорезями на рабочей шейке (рис. 6.11).
Формула для расчета исходного усилия
Q = (Q + Q¢)tg(a/2 + j),
где a — угол конуса, a = 30–40°; j — угол
трения между конусом и рабочей шейкой,
j = 1–2°; Q¢ — сила, деформирующая лепе
стки оправки (для стали с модулем упруго
1 2 S 2 D3
сти E = 2,2×105 МПа), Q3 4 6 2 103
—
l3
для оправки с тремя прорезями; d — пер
воначальный зазор между заготовкой и оп
Рис. 6.11
равкой, d = 0,3–0,5 мм.
Схема консольной оправки
с прорезями
Точность центрирования такой оправ
ки составляет 0,02–0,4 мм.
Коэффициент усиления i оправки:
i3
Q 2 Q1
1
3
.
W
tg(4 /2 2 5)
Оправка консольная клиноплунжерная (рис. 6.12).
Рис. 6.12
Схема консольной клиноплунжерной оправки
Формула для расчета исходного усилия
W 5 Q2
cos 1 2 sin(3 /2 4 11 )
,
cos(3 /2 4 2 2 11 )
где j1 — угол трения между поверхностью конуса и плунжера, j1 = arctgf1 =
= arctg(0,12–0,15); j — угол трения между плунжером и поверхностью заго
товки, j = arctgf = arctg(0,25–0,5); a — угол конуса, равный 30–40°.
142
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Коэффициент усиления i оправки
i5
cos(1 /2 2 2 3 41 )
Q
.
5
W cos 4 3 sin(1 /2 2 41 )
Точность центрирования оправки составляет 0,05–0,10 мм.
Подробно по конструкции самоцентрирующих оправок и их основные раз$
меры приведены в справочной литературе [9], [11], [27].
МЕХАНИЗМЫ С ГИДРОПЛАСТМАССОЙ
Гидропласт — это жидкотекущая смола ТУМхП2742$53, способная, как и
жидкость, передавать давление во всех направлениях. Применяются две раз$
новидности механизмов с гидропластом: многозвенные (рис. 6.13а) и с тонко$
стенной деформируемой втулкой (рис. 6.13б). Точность центрирования таких
механизмов составляет 0,005–0,010 мм. Базовые отверстия заготовки должны
быть обработаны по H7–H8.
Рис. 6.13
Механизмы с гидропластом:
а — многозвенные; б — с тонкостенной упругодеформируемой втулкой; 1 — корпус; 2 — плунжер;
3 — гидропласт; 4 — поршень; 5 — заготовка; 6 — втулка; d — диаметр плунжера; D — диаметр порш$
ня; q — распределенное усилие зажима на длине lз заготовки; Q — сила зажима; q — усилие возврат$
ной пружины; Dв — наружный диаметр тонкостенной втулки; h — толщина втулки.
Для многозвенных механизмов исходное усилие рассчитывается по форму$
ле [9]:
2
d 1
Pи 3 (Q 4 Q1 )
,
D 5
1 2
а коэффициент усиления:
1 Dd 2 4,
2
i3
где h — КПД механизма, h = 0,90–0,95; Q1 — сила, необходимая для сжатия
пружин, Q1 = 50 × n, Н; n — количество пружин.
Порядок расчета гидропластовых механизмов с упругодеформируемой втул$
кой следующий [9].
1. Выбирается посадка соединения «заготовка — упругая втулка». Посад$
ка по диаметру Dв должна быть с гарантированным зазором по 6–10 квалите$
там с посадкой H/h.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
143
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
2. Определяется длина тонкостенной части втулки
i = (1–1,3) × lз,
где lз — длина заготовки.
3. По таблице 2.2 [9] назначается толщина тонкостенной втулки h.
4. Рассчитывается максимальный зазор Smax между заготовкой и втулкой в
свободном состоянии; Smax » 0,01–0,03 мм.
5. Определяется характеристический показатель 2 × l0, где
2 1 l0 2 2,6 1 Dв 1 h / Dв ,
и устанавливается, является ли втулка длинной (l > 2 × l0) или короткой (l < 2 × l0).
6. Определяется допустимая упругая деформация втулки DDв по соотноше$
ниям:
1) для длинных втулок:
· из хромистых сталей DDв » 0,003 × Dв;
· из конструкционных сталей DDв » 0,002 × Dв;
2) для коротких втулок:
· из хромистых сталей DDв » 0,003 × [1 – j(x)];
· из конструкционных сталей DDв » 0,002 × [1 – j(x)].
l
.
Величины j(x) даны в таблице 6.9, x 1 0,9
2 3 Dв
1 2 3 4 5 6 2 7 89 7
123456675896
562 81 18
12
1 18
12
1 18
12
1 18
1213
4213
1253
12673
4263
12813
1243
12993
1293
12
3
42 3
12463
1283
129 3
4213
12 43
4253
12483
12 3
129 3
4243
127 3
4293
12193
1273
12553
4283
12 93
8213
121 3
12 3
12583
42 3
12 73
8243
12173
1263
12 63
4273
12853
8283
12183
12 3
12 13
42 3
12873
82 3
12143
7. Рассчитывается зажимной натяг d = DDв – Smax.
8. Определяется гидростатическое давление:
· для втулок с l > 0,3Dв:
2 1 2Dв 1 E 1 h
p3
;
Dв2
· для втулок с l < 0,3Dв:
1,25 1 2Dв 1 E 1 h
p3
,
Dв 1 l
где E — модуль упругости материала гильзы, МПа; p — гидростатическое дав$
ление, МПа; DDв и h — в мм.
144
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
9. Находится зажимное усилие:
Q 2 5 1 105 1
21h 21h
21h
1
1 3 1 Dв 2 106 1 h 1
1 3,
Dв
Dв
Dв
где d — зажимной натяг, d = DDв – Smax, мм.
10. Определяется сила F, удерживающая заготовку от осевого перемеще
ния и поворота:
2h
F 1 106 2 f 2 h 2 3 2
,
Dв
где f — коэффициент трения между заготовкой и втулкой.
11. Рассчитывается максимальный передаваемый крутящий момент:
Mmax 3 F
Dв 106 1 f 1 h 1 2 1 Dв
3
2
2
2h
.
Dв
12. Находится исходное усилие:
1 2 d2
p.
4
Полученные данные для Mmax уточняются:
Pи 3
Mmax > k × Mрез,
где k — коэффициент надежности закрепления.
Коэффициент усиления механизма:
i3
Q 4 1 106 1 h 1 2 2h
3
.
W
Dв
4 1 D2
МЕХАНИЗМЫ С ГОФРИРОВАННЫМИ ВТУЛКАМИ
На оправках с гофрированными втулками рекомендуется обрабатывать за
готовки с базовыми отверстиями, выполненными по 6–9м квалитетам точно
сти. Точность центрирования на таких оправках 0,002–0,003 мм. Втулки вы
полняются из стали У10А, 38Х и 65Г, закаленной до HRC 45–50.
На рисунке 6.14 показана схема зажимного механизма с гофрированными
втулками.
Расчет механизма сводится к определению геометрических размеров гоф
рированных втулок 2 и определению W. Под действием силы W втулки упруго
деформируются. При этом их наружные диаметры увеличиваются, а внутрен
ние — уменьшаются. По внутреннему диаметру каждая втулка центрируется и
закрепляется на цилиндрической поверхности корпуса 4, а по наружному —
центрирует и закрепляет заготовку 1.
В качестве исходных данных при расчете механизма принимаются следую
щие данные:
· lз и Dз — длина и диаметр базового отверстия заготовки, мм;
· Tз — допуск на диаметр Dз, мм;
· Mр — момент от сил резания, Н×м;
· Sr — гарантированный зазор между отверстием заготовки и наружной ци
линдрической поверхностью втулок в исходном состоянии, мкм.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
145
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 6.14
Механизм с гофрированными втулками:
1 — заготовка; 2 — гофрированные втулки; 3 — шток; 4 — корпус.
Рекомендуется принимать:
· при 20 < Dз £ 29 мм Sr = 10 мкм;
· при 29 < Dз £ 53 мм Sr = 20 мкм;
· при 53 < Dз £ 80 мм Sr = 30 мкм; при Dз > 53 мм Sr = 40 мкм.
Данные по геометрическим размерам гофрированных втулок приведены в
литературе [9].
Расчет механизма производится в следующей последовательности.
1. По диаметру Dз базового отверстия заготовки по таблице 2.3 [9] находят
основные геометрические параметры втулок: диаметр D1 буртов, наружный
диаметр D2 внутреннего пояска, толщина h кругового рабочего пояска, диа$
метр d2 отверстия втулки, длина l гофры и др.
2. Определяется диаметр наружной рабочей поверхности втулки, мм:
D = Dз – S r ,
где Sr — зазор между гофрой и заготовкой, Sr = 0,03–0,05 мм.
3. Вычисляется диаметр центральной расточки гофры:
d = D – 2h.
4. Определяется приращением наружного диаметра втулки для центриро$
вания и закрепления заготовки:
DD = Tв + Tз + Sr,
где Tв — допуск на наружный диаметр втулки (обычно принимается по h6),
мкм; Tз — допуск на внутренний диаметр заготовки.
146
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
5. Вычисляется потребное исходное усилие:
2D Tв 1 Tз 1 Sr
W3
3
,
4
4
где c — коэффициент, принимается по таблице 2.3 [9].
6. Вычисляется наибольшее напряжение smax, МПа, возникающее в мате&
риале втулки при ее нагружении силой W, Н:
smax = Pи × y,
где y — коэффициент, принимается по таблице 2.3 [9].
7. По таблице 6.10 выбирается материал втулок в зависимости от smax, МПа.
1 2 3 4 5 6 2 7 89
1123123452
675892
1223
159 3
559 3
4523
52
3
52 9 3
6223
52 3
12 3
78223
12 3
7
75223
12 3
15 3
8. Вычисляется момент MТР, Н×мм, создаваемый оправкой с втулками:
MТР 1 1,5 2 104 2 3 2 Dз2 2 W 2 nв 2 f,
где nв — количество гофрированных втулок; Dз — диаметр заготовки, мм; f —
коэффициент трения между гофрами и заготовкой, f = 0,1–0,12.
При этом должно соблюдаться условие:
MТР ³ k × Mp.
Допуски на размеры и взаимное расположение поверхностей втулок приве&
дены в [9].
Коэффициент усиления:
Q
1 1,5 2 104 2 3 2 Dз2 2 n.
W
МЕХАНИЗМЫ С ТАРЕЛЬЧАТЫМИ ПРУЖИНАМИ
Пластинчатые (тарельчатые) пружины (рис. 6.15а) применяются в приспо&
соблениях для базирования и закрепления заготовок с цилиндрическими база&
ми (рис. 6.15б). Пластинчатые пружины представляют собой вогнутую шайбу
с прорезями. При приложении исходного усилия W происходит приращение
Рис. 6.15
Силовой механизм с пластинчатыми пружинами:
а — конструкция пружины; б — схема закрепления заготовки.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
147
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
наружного диаметра, которое составляет 0,1–0,4 мм. При этом происходит цент
рирование заготовки и ее закрепление. Точность центрирования 0,01–0,02 мм.
Пластины изготавливаются из стали 60С2А толщиной 0,1–0,4 мм и закали
ваются до HRC 40–45. Базовое отверстие заготовок выполняют с точностью не
ниже H11.
Расчетные формулы для определения Pи1 и Q1 для одной пружины имеют
вид [14]
Pи1 1 1,33 2 tg(3 4 25) 2 Q1 ;
Q1 1
Pи1
;
1,33 2 tg(3 4 25)
3 1 10–125.
Количество пружин для передачи всего крутящего момента, равного k × Mрез,
составит:
k 1 Mрез
n2
,
Mk
где n — число пружин; Mрез — момент от сил резания, Н×м; k — коэффициент
надежности; Mk — момент от сил трения для одной пружины.
Величина момента трения Mk, передаваемого одной пружиной, определя
ется по таблице П.8. В таблице П.9 приводятся размеры пружин, обозначен
ные на рисунке 6.15а.
Исходное усилие Pи и зажимное Q определяем по формулам
Pи 2 Pи1 1 n 2 1,33 1 tg(3 4 25) 1 Q1 1 n 2 1,33 1 tg(3 4 25)
Q 2 Q1 1 n 2
k 1 Mрез
;
f 1R
Pи1 1 n
,
1,33 1 tg(3 4 25)
где f — коэффициент трения между пружинами и заготовкой, f = 0,1–0,15.
Коэффициент усиления:
i1
Q
1
.
1
Pи 1,33 2 tg(3 4 25)
МЕМБРАННЫЕ МЕХАНИЗМЫ
Применяются в приспособлениях в основном для шлифовальных станков
(для центрирования и закрепления заготовок). В приспособлениях применя
ются чашечные (рис. 6.16а) и рожковые (рис. 6.16б) мембранные механизмы.
В первом случае мембрану перед установкой заготовки деформируют усилием
W для выбора зазора для установки заготовок. Материалы мембран — стали
65Г, 30ХГС, У7А, закаленные до твердости HRCЭ 40–45.
Мембранные механизмы обеспечивают точность центрирования 0,003–
0,005 мм для шлифованных кулачков или 0,01–0,03 мм для обычных кулач
ков. Расчет рожковой мембраны, как основного элемента рожковых зажим
ных механизмов, производится в следующей последовательности.
148
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 6.16
Мембраны:
а — чашечная; б — рожковая.
1. Определяется зажимное усилие на одном рожке:
k 1 Mрез
Q 2 103
,
n1f 1r
где Q — сила зажима, Н; Mрез — момент от сил резания, Н×м; n — число рожков
(n = 6–12); f — коэффициент трения между заготовкой и рожком (f = 0,15–0,18);
r — радиус базы заготовки r = D/2, мм; k — коэффициент надежности закреп!
ления.
2. Находится величина момента, вызывающего изгиб диска мембраны:
Q 1n1l
Mизг 2
,
23 1 r
где Mизг — распределенный по окружности радиусом r момент, вызывающий
изгиб диска мембраны, Н; l — расстояние от середины рожка до плоскости
мембраны, мм.
3. Выбирается наружный диаметр мембраны D. Принимаем
D = (1,3–1,4) × D¢,
где D¢ — диаметр базы заготовки, мм; диаметр D¢ выполняется по h7–h9.
4. Рассчитывается толщина диска мембраны b, мм, по соотношению b =
= 0,025 × D.
5. Определяется отношение D/2r, а по нему — величина момента заделки
Mзад, Н×м, в долях от Mизг.
6. Рассчитывается цилиндрическая жесткость изгиба мембраны:
E 1 b3
,
B2 3
10 1 12 1 (1 3 42 )
где B — цилиндрическая жесткость изгиба мембраны единичной ширины, Н×м;
E — модуль упругости, МПа (E = 2,1×105 МПа); b — толщина мембраны, мм;
m = 0,3.
7. Определяется угол j разжима кулачков (рожков) при закреплении заго!
1 ):
товки с наименьшим предельным размером установочной базы ( Dmin
M 1r
2 3 3 зад
,
10 1 b(1 4 5)
где j — угол зажима кулачков, рад.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
149
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
8. Определяется угол j¢ максимального разжима рожков:
T
2
31 4 3 5 D1 5
,
26l 26l
где TD1 — допуск на диаметр D¢, мм; D = 0,01–0,03 — зазор между базой заго
товки и кулачками перед установкой заготовки с Dmax.
9. Рассчитывается исходное усилие Pи, необходимое для разжима рожков
перед закреплением заготовки:
Pи 5
4 2 103 2 3 2 b 2 41
.
D
r 2l2
2r
Коэффициент усиления i:
k 1 Mрез 1 l 1 D
k 1 Mрез 1 l 1 D
Q
2
2
.
Pи 4 1 n 1 f 1 4 1 b 1 53 1 2 1 r 8 1 n 1 f 1 4 1 b 1 r
6.5. РАСЧЕТ ПРИВОДОВ
ЗАЖИМНЫХ УСТРОЙСТВ
В зажимных устройствах первой группы применяются пнев
матические, гидравлические, пневмогидравлические, центробежноинерцион
ные, магнитные, вакуумные и другие приводы. В настоящем учебнике рассмат
риваются пневматические, гидравлические и пневмогидравлические и другие
приводы.
6.5.1. ПНЕВМАТИЧЕСКИЙ ПРИВОД
Пневматический привод состоит из пневмодвигателя, воздухопроводов и
аппаратуры управления. Энергоносителем является сжатый воздух с давлени
ем p = 0,4–0,6 МПа. Расчет на прочность элементов пневмопривода произво
дится при давлении p = 0,6 МПа, а величину исходного усилия W определяют
при давлении p = 0,4 МПа.
Пневмодвигатели выполняют в виде пневмоцилиндров и диафрагменных
пневмокамер. Они бывают одностороннего и двустороннего действия. В первом
случае обратный ход штока осуществляется с помощью пружины, а во вто
ром — под действием сжатого воздуха.
ПНЕВМОЦИЛИНДРЫ
Пневмоцилиндры подразделяются на одинарные и сдвоенные. В одинар
ных имеется один поршень, а в сдвоенных — два. Развиваемое пневмоцилин
дром исходное усилие W постоянно по всей длине хода штока и рассчитывается
по формулам, приведенным в таблице 6.11.
В станочных приспособлениях применяются прикрепляемые, встроенные
и вращающиеся пневмоцилиндры. Стандартизованные прикрепляемые пнев
моцилиндры имеют несколько исполнений по способу закрепления:
· 0 — на удлиненных стяжках;
· 1 — на лапах;
· 2 — на переднем фланце;
150
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89
1234567859
899 555792 56
3975
75
9
7 29
7975
1234567859
7 89 7 36
7
7
9
89
775 95369
1 2
3 D 3 p 3 4 5 q;
4
1
W 6q
D 2 23
13 p34
W2
1
75
7 8936
775 95369
2345678691 461
1
W 2 3 D2 3 p 3 4;
4
1
Pи 6 q
D 2 23
13 p34
61
298691 461
1
3 ( D2 5 d2 ) 3 p 3 4;
4
1
43W
D2
6 d2
13 p34
W2
1
2345678691 461
π
W = ⋅ (2 ⋅ D2 − d2 ) ⋅ p ⋅ η 1
4
31
1
11
298691 461
1
W 2 3 ( D2 5 d2 ) 3 p 3 4;
2
1
23W
D2
6 d2
13 p34
5 251 1 1 3461 411 53 1 343 31 ! 91 3 6"1 4171#"$#%1
4 13 3 ! 91& "11'1131"1 111& 53 (1& %1113 13)91
· 3 — на заднем фланце;
· 4 — на проушине;
· 5 — на цапфах.
В таблице 6.12 приводятся основные параметры стационарных поршневых
пневмоцилиндров двустороннего действия с односторонним штоком (ГОСТ
15608$81).
Встроенные пневмоцилиндры применяют в приспособлениях, компоновка
которых не позволяет применять прикрепляемые цилиндры. Диаметры таких
цилиндров назначаются в результате расчетов по таблице 6.13. Здесь же приво$
дятся данные по выбору диаметра штока.
Вращающиеся пневмоцилиндры выполняют с диаметром цилиндра 100, 160,
200 и 250 мм, ход поршня 32 и 45 мм. В них применяют сжатый воздух под
давлением 0,63 МПа.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
151
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89
1234526782592
!
1 55
52 67
52 9
"
#
#
#
$
8
8
8
8
8
8
8
8
8
38678
8
8
8
8
8
8
8
8
8
389 7358
8
8
8
8
8
8
8
8
8
&8
&8
8
8
8
8
8
8
8
8
8
8
8
8
8
*8
*8
8
8
8
123456789 6 58 5356788
57 8 !"#8$%53
'235 9 (28$%53
8
8$ )8
57 8$ 2 78 88
57 8 !"#8678$ 2
8
&8 &8 &8 &8 &8 &8 &8
&8 &8 &8 &8 &8 &8 &8 &*8 &*8
1 2 3 4 5 6 2 7 89
1234536789
3
123
813
943
243
683
43
5443
5123
5643
1443
7
838
7
8
682
43
513
593
5 3
123
813
943
1243
683
8143
43
!243478"2783 8 4#781 8$ 8
9 8 57382 8%& 8
'4894 3( 8
8
)8
*8
8
1243
56475843
19471443
8 478443
8143
12471143
89478843
61472843
9443
94478243
61472643
54147 443
2443
69472243
54447 943
52 4758443
6843
54447 443
5224759243
1644718243
443
5 24752443
1 24719643
984478 443
54443
1 44712243
9844794443
6 24768243
51243
9144794443
6 44761443
56443
14476 443
5539447543 443
5 354475 443
14443
5539447543 443
5 3 4475 35443
1 394471 31443
5 3 4475632443
1 3 4471635443
99314479539443
84344471 34443
9 344479935443
93 447 435443
12443
7
36894 375689375 43 458188
8
4# 848
7
52 9 625467 4 5436447
443
525 3333333 33!3 "#$3
%&3'()33543
3
ДИАФРАГМЕННЫЕ ПНЕВМОКАМЕРЫ
Диафрагменные пневмокамеры отличаются от пневмоцилиндров непосто&
янством исходного усилия W по мере движения штока, поэтому длина хода их
штока ограничена. Пневмокамеры могут быть одностороннего и двустороннего
действия, одинарными и сдвоенными. В них используют резинотканевые и ре&
зиновые диафрагмы. На рисунке 6.17 показаны схемы и рекомендуемые дли&
ны ходов резинотканевых и резиновых диафрагм.
152
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 6.17
Рациональные длины ходов штока пневмокамер с диафрагмами:
а — тарельчатыми резинотканевыми; б — плоскими резинотканевыми; в — плоскими резиновыми.
Применение диафрагменных пневмокамер предпочтительнее поршневых
приводов вследствие более высокого КПД пневмокамер из!за отсутствия тре!
ния скольжения.
Расчетные формулы для определения исходного усилия W и диаметров пнев!
мокамер представлены в таблице 6.14.
В таблицах 6.15 и 6.16 приведены данные для выбора рекомендуемых пара!
метров пневмокамер и исходной силы W на штоке.
1 2 3 4 5 6 2 7 89
1234567859
3975
75
899 555792 56 2975
2 5 89
2 5 89 7 36
12345672894 2329
7
2 5 9
1234567859
89
775 95369
12345672894 34
82 494
54
82
π
2
⋅ ( D + d) ⋅ p − q;
W=
16
2 328
1
0,75 1 2
W3
1 ( D 4 d)2 1 p 5 q;
16
W 4q
D 3 41
5d
0,75 1 2 1 p
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
153
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
123456789
3
96
5 29896 6
1234567897 6 3 5
123456786 9 8
778
8643 383237 668
π
⋅ ( D + d)2 ⋅ p − q; 8
W=
16
89 44 3 6688188
0,75 1 2
1 ( D 4 d)2 1 p 5 q;
16
8
W 4q
D 3 41
5d
0,75 1 2 1 p
W3
8
1234567897 6 378
123456786 9 8
8643 383237 668
π
W = ⋅ D2 ⋅ p − q; 8
4
89 44 3 6688188
0,9 1 2 2
1 D 1 p 5 q;
4
8
W 4q
D 3 21
0,9 1 2 1 p
W3
8
89
972
3
96 2 889 692 46
972
786 9 8
7897 6 3 5
778
8643 383237 668
π
⋅ ( D + d)2 ⋅ p; 8
W=
16
35 8
89 44 3 668!8188
0,75 1 2
1 ( D 4 d)2 1 p;
16
8
W 4q
D 3 41
5d
0,75 1 2 1 p
W3
8
1234567897 6 3 5
123456786 9 8
778
8643 383237 668
π
⋅ ( D + d)2 ⋅ p; 8
W=
16
89 44 3 6688188
0,75 1 2
1 ( D 4 d)2 1 p;
16
8
W 4q
D 3 41
5d
0,75 1 2 1 p
W3
8
154
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
123456789
3
96
5 29896 6
1234567897 6 3
1234567869 8
78
8643 383237 668
π
W = ⋅ D2 ⋅ p; 8
4
89443 6688188
0,9 1 2 2
W3
1 D 1 p;
4
8
W
D 3 21
0,9 1 2 1 p
8
1297 898 8881 8 888188 78 8!8 74534"8 9#6 8 8!8 26 8 38 $35 8
848%8188!82897 6 35 7 87&9 88488'88188'8(')8!82897 6 3 8(8!832*6+
87&9 848&26, 8-./868-.-)8
1 2 3 4 5 6 2 7 89
1234526782592
7
52 9 62543 52
52 4 4 64 9 1 55
1 269
7 52 2 55
46
7 59 3 55
7 2643 629
7 5
1 1 ! 2 2
7 2649
7 5
1 1 2 " # 2 3 " $# " %&
1234
5674
884
1134
19 4
5674
1134
13 4
2
4
7634
17 4
1894
23 4
3694
1 34
2534
52 4
9684
2234
5
7
861 4
28 4
5 34
4
4
1 2 3 4 5 6 2 7 89 87
1234567892
79679
4964799
7696479
7 9
9
64 769
649
94 46 9
49
9 2345649
9345919
5 89 7 7 39
9!95 89 42 39
94 46 9
49
9 2345649
93459""19
1234
53664
27664
87364
57364
1964
37664
85364
72664
91364
2664
6664
9 664
16664
7364
2364
1846664
1146664
1745664
1343664
5264
2546664
1743664
2 46664
2346664
8664
5946664
2746664
8943664
8246664
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
155
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
6.5.2. ГИДРАВЛИЧЕСКИЙ ПРИВОД
Гидравлический привод состоит из силового гидроцилиндра, насоса, бака,
трубопроводов, аппаратуры управления. По сравнению с пневмоприводом гид
ропривод более компактен благодаря более высокому давлению энергоносите
ля (масла) p = 1–2 МПа. Применение гидропривода в приспособлениях целесо
образно для гидрофицированных станков.
Гидроприводы бывают одностороннего и двустороннего действия. В табли
це 6.17 приведены схемы и формулы для расчета исходного усилия W и диа
метра поршня гидроцилиндра одностороннего и двустороннего действия.
В таблице 6.18 и 6.19 приведены значения исходного усилия Pи для гидро
цилиндров одностороннего и двустороннего действия.
1 2 3 4 5 6 2 7 89
1234567859
899 555792 56 29
5 29
7 29
7
1234567859
17 89 7 36
7
9
89
775 95369
1 2
3 D 3 p 3 4 5 q;
4
W 6q
D 2 23
; 2
13 p34
4 7 0,9
W2
2
7 8936
775 95369
345678429 82
1
W 2 3 ( D2 5 d2 ) 3 p 3 4 2
4
2
525242224222229
31 8 78429 82
8W 2 1 3 D2 3 p 3 4;
99
4
2
W
9 D 2 23
13 p34
9
826 5222232222121 542
1 2 3 4 5 6 2 7 89
7
123454678943 818 3 8 4 4346 8 69662 8 294 848288878
8 ! "8488! "#8
$47%284346 783&8%%8
' 8(6 84&8%%8
1&8)8
123
453
446789693
23
3
723
47648446 3
4 3
596585 643
1 8
6 3
5253 3 3 34979 13 3 !"#3 " $63 %3 3 3
49797 13&3#'3(3)! 3(3*%)+3!3+3(3334979 163
%3(3*%% 3&33349797 13
156
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89
7
123454678943 818678
284 4346 89 662 829 48
487326448288878 8!"!!#$%&8
437831)8*8
'47(2 843467)8((8
%+8
1234567589
187589
9
9
,+8
-.8
"+8
++8
9
9
9
9
9
9
9
9
52599292893893295 !29" 995 9 9 9999#9
389 359 5 !29 99$9
9
9 9 9 9%9 &9 '3(!5! 9 5)* !29 +,56! 94549
532 9,23(-9295 !95' 928%9
6.5.3. ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД
Пневмогидравлический привод включает в себя силовой гидроцилиндр 1 и
пневмогидравлический усилитель 2 (рис. 6.18).
Работа пневмогидропривода заклю
чается в следующем. При подаче давле
ния из пневмосети в штоковую полость
усилителем 2 под давлением pв = 0,4 МПа
поршень перемещается влево и создает
давление p жидкости, которое передает
ся в штоковую полость гидроцилиндра 1,
перемещающее поршень гидроцилиндра
вправо и создающее необходимое исход
ное усилие W.
Исходная сила Pи на штоке гидроци
линдра рассчитывается по формулам:
Рис. 6.18
· толкающая сила для гидроцилиндра
Схема пневмогидропривода
одностороннего действия
2
W6
1D 2
3 4 D2
pв 4 9 в 4 7o 4 7м 4 75м 8 q;
dг
4
· толкающая сила для гидроцилиндра двустороннего действия
2
W6
1D 2
3 4 D2
pв 4 8 в 9 4 7o 4 7м 4 75м ,
dг
4
где pв — давление воздуха, pв = 0,4 МПа; Dв — диаметр поршня усилителя
(Dв устанавливается в результате расчета исходного усилия W); dг — диаметр
плунжера, dг » 0,3Dв; D — диаметр поршня рабочего гидроцилиндра; ho — объ
емный КПД механизма, ho = 0,95; hм — механический КПД пневмогидравли
ческого усилителя, hм = 0,95; 21м — механический КПД гидроцилиндра, 21м 3
3 0,90; q — сила, развиваемая пружиной, q = k × l, где k — жесткость пружины;
l — перемещение пружины
1 2 d 2 r2
q 3 p1 2
,
4
где p1 = 0,2 МПа; d — диаметр штока рабочего гидроцилиндра, d » 0,3D.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
157
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
6.6. ПРИМЕР РАСЧЕТА
ЗАЖИМНОГО УСТРОЙСТВА ПРИСПОСОБЛЕНИЯ
Задача. Необходимо выбрать и рассчитать все параметры за
жимного устройства для обработки углового паза в цилиндрической заготовке,
чертеж которой показан на рисунке 6.19.
Обработку осуществляем концевой фрезой: Т15К6, d = 20 мм, z = 6, w = 20°.
Заготовку устанавливаем на призму с упором в торец. В качестве зажимно
го механизма выбираем рычажношарнирный. На рисунке 6.20 приведена схе
ма установки заготовки в приспособлении с обозначением параметров, необхо
димых для расчета силы зажима.
На рисунке 6.20 использованы следующие обозначения:
Q — сила зажима, направленная под углом y = 30° к горизонтальной оси
заготовки; W — исходное усилие, развиваемое приводом; Pн, Pv, Po — состав
Рис. 6.19
Чертеж заготовки
Рис. 6.20
Схема установки заготовки и параметры для расчета сил зажима
158
Powered by TCPDF (www.tcpdf.org)
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ляющие силы резания в осевом, радиальном и тангенциальном направлениях;
F1 и F2 — силы трения в местах контакта заготовки с контактными элементами
приспособления и с гранями призмы соответственно,
F1 4 f1 1 Q;
F2 4
Q 1 sin 2 3 Po 0,5 1 Q 3 Po
,
4
sin 5 /2
0,71
где f1 и f2 — коэффициенты сил трения между поверхностями зажимного уст"
ройства, призмы и заготовки, f1 = f2 = 0,20 (табл. 6.4); L — длина заготовки,
L = 200 мм; n — расстояние от точки приложения силы зажима Q до штыря;
l — расстояние от оси штыря до оси заготовки, l = 30 мм; m — расстояние меж"
ду направлением силы Pн и осью заготовки, m = 40 мм; p — расстояние между
направлением силы трения F2 и осью заготовки,
D
100 2
p 1 cos 2 /2 1
3
1 35,25 мм;
2
2
2
r — расстояние между направлением силы трения F1 и осью заготовки,
r1
D
sin 2 1 50 3 sin304 1 25 мм;
2
q, l1 и l2 — угол плеча рычажно"шарнирного механизма, q = 20°, l1 = 40 мм;
l2 = 20 мм; a — угол призмы, a = 90°.
Определим значения t и B, необходимые для расчета силы Pz:
t1
D
4m2
6400
1 2 2 2 A 1 50 1 2
2 20 1 5 мм;
2
10000
D
B1
D
4 A2
1600
1 2 2 2 m 1 50 1 2
2 40 1 10 мм.
2
10000
D
Определим составляющую силу резания Pz по формуле, приведенной в таб"
лице 6.1, для фрезерования концевой фрезой. Значение коэффициента Сp = 682.
Значение подачи Sr = 0,12 мм/зуб.
Pz 2 C p 3 t0,86 3 B 3 z 3 S0,72 3 d 10,86 2 682 3 50,86 3 10 3 6 3 0,120,72 3 2010,86 2 2701Н.
Составляющие силы резания Pн, Pv и Po определим из соотношений, приве"
денных в таблице 6.3:
Pн 1 0,8 2 Pz 1 0,8 2 2701 1 2161 Н;
Pv 1 0,6 2 Pz 1 0,6 2 2701 1 1620 Н;
Po 1 0,5 2 Pz 1 0,5 2 2701 1 1350 Н.
Алгоритм расчета силы зажима Q зависит от требований, предъявляемых к
зажимному устройству приспособления.
В данном примере требования сводятся к следующему.
1. Составляющая силы резания Pн не должна нагружать штырь для умень"
шения его износа. В этом случае уравнение равновесия в направлении заготов"
ки будет иметь вид
0,5 1 Q 2 Po
k 1 Pн 3 F1 2 F2 3 f1 1 Q 2
f2 .
0,71
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
159
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Отсюда
Po
f
0,71 2
Q3
,
0,5
f1 4
f2
0,71
k 1 Pн 2
где k — коэффициент надежности закрепления.
Определим величину k по формуле
k = k 0 × k1 × k 2 × k 3 × k 4 × k5 × k6 ,
выбрав значение составляющих k0–k6 по таблицам 6.5 и 6.6:
k = 1,5 × 1,3 × 1,0 × 1,5 × 1,0 × 1,0 × 1,5 = 4,39.
Коэффициенты f1 и f2 сил трения определили по таблице 6.4: f1 = f2 = 0,20.
Рассчитаем Q
Q3
4,39 1 2161 2 1350 1
0,20 4
0,20
0,71
0,5 1 0,2
0,71
3 26784 Н.
2. Заготовка не должна повернуться вокруг точки O в вертикальной плос'
кости. Уравнение статики (моментов) будет иметь вид
k 3 Pн 3
1 D2 4 l 4 t2 5 P 3 L 6 (Q 3 sin 7 6 F ) 3 n,
o
1
где F1 = Q × f1; l = 10 мм (из конструктивных соображений); L — длина заготов'
ки, L = 200 мм.
Выразим силу зажима Q из уравнения статики
Q5
k 3 Pн 3
1 D2 4 l 4 t2 4 P 3 L .
o
n 3 (sin 6 7 f1 )
Подставив значения параметров, получим
Q3
4,39 1 2161 1 (50 2 10 2 5) 2 1350 1 200
3 886,2 Н.
100 1 (0,50 4 0,20)
3. Заготовка не должна провернуться вокруг своей оси под действием мо'
ментов от сил Po и Pv.
Уравнение статики (моментов) будет иметь вид
1 B2 2 6 Q 3 f D2 5 N 3 f D2 ;
B
D 8 P 5 Q 3 sin 7 9 D
k3 P 3m 4 k3 P 31 A 5 2 6 Q 3f
5
3f .
2
2
cos
2
k 3 Pv 3 m 4 k 3 Po 3 A 5
1
2
o
v
160
Powered by TCPDF (www.tcpdf.org)
o
1
2
Глава 6
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Из уравнения статики выразим силу зажима Q и, подставив значения пара
метров, получим
D
Po 3 f2
B
2
k 3 48 Pv 3 m 6 Po 3 A 7 59 6
2
cos /2
Q
sin D
3 f1 7
f
2
cos 2
1350 3 0,20 3 50
4,39 3 [1680 3 40 6 1350 3 (10 7 5)] 6
0,71
0,5
50 3 0,20 7
3 0,20 0,71
1
1
2
2
10 386 Н.
Из трех рассмотренных вариантов выбираем наибольшую силу зажима
Q = 26 784 Н, которая будет использоваться при расчете параметров привода.
Для выбранного рычажношарнирного механизма (табл. 6.8, поз. 7) опре
деляем величину передаточного отношения
i2
1
l
0,9
0,9
40
312
3
2
3 2 3 4 2 2,37.
2 3 (tg 4 5 6) l 2 3 (tg20 5 1) 20 2 3 0,38
Исходное усилие находим по формуле
W2
26 784
Q 1t
2
2 15 917 Н.
i 1 cos 3 0,71 1 2,37
Поскольку для закрепления заготовки в данном примере требуется неболь
шой ход штока зажимного механизма, выбираем в качестве привода пневмока
меру. Диаметр мембраны, ее толщину, диаметр опорной шайбы определим из
таблиц 6.14 и 6.15
D = 250 мм;
t = 5 мм;
d = 235 мм.
Расчет и проектирование зажимных устройств приспособлений
Powered by TCPDF (www.tcpdf.org)
161
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
РАСЧЕТ ТОЧНОСТИ
СТАНОЧНЫХ
ПРИСПОСОБЛЕНИЙ
7.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Заданная точность параметра заготовки, регламентируемая
допуском Tn, будет обеспечена, если сумма всех погрешностей Dобр, имеющих
место при обработке, будет меньше или равна этому допуску:
Dобр £ Tn.
(7.1)
Придерживаясь основных методических подходов А. А. Маталина [22], для
определения суммарной величины всех погрешностей обработки воспользуем$
ся зависимостью:
1 обр 2 1,2 32м 4 32ув 4 32уст 4 32н 4 1 сист ,
(7.2)
где wм — мгновенное рассеяние; wув — погрешность, связанная с уводом инст$
румента; wуст — погрешность установки заготовки; wн — погрешность настрой$
ки станка; Dсист — алгебраическая сумма всех систематических погрешностей.
Погрешность установки заготовки определяется по формуле
ω уст = ω2б + ω2зак + ω2пр ,
(7.3)
где wб — погрешность базирования; wзак — погрешность закрепления; wпр —
погрешность приспособления.
Погрешность настройки станка определяется по формуле:
1н 2 12рег 3 12изм 3 12смещ ,
(7.4)
где wрег — погрешность регулирования; wизм — погрешность измерения при на$
стройке станка; wсмещ — погрешность смещения.
Выражение (7.2) представляет собой сумму случайных и систематических
погрешностей. Погрешность приспособления в нем является случайной вели$
чиной, что характерно для крупносерийного и массового производств при ис$
пользовании многоместных приспособлений, нескольких экземпляров одного
приспособления, приспособлений$спутников на автоматических линиях. Для
такого случая погрешность приспособления, влияющая на точность интере$
сующего нас параметра заготовки, можно определить по формуле
162
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1пр 2 12изг.пр 3 12изн 3 12уст.пр ,
(7.5)
где wизг.пр — погрешность изготовления приспособления; wизн — погрешность,
связанная с износом приспособления; wуст.пр — погрешность установки приспо
собления на станке.
Подставляя в зависимость (7.1) формулы (7.2)–(7.5), получим
1,2 12м 2 12ув 2 12б 2 12зак 2 12изг.пр 2 12изн 2 12уст.пр 2 12рег 2 12изм 2 12смещ 2
2 3 сист 4 Тn .
(7.6)
Прямое использование последней зависимости характерно для провероч
ных расчетов, в которых оценивается возможность всей технологической си
стемы в целом обеспечивать точность заданного параметра заготовки. Такой
подход возможен и при проектировании станочных приспособлений. Проекти
ровщиков технологической оснастки обычно интересуют допустимые погреш
ности изготовления станочного приспособления.
Для оценки допустимой погрешности изготовления приспособления решим
выражение (7.6) относительно wизг.пр:
3изг.пр 4
4
2
(7.7)
7 Тn 5 6 сист 8
5 1 32м 9 32ув 9 32б 9 32зак 9 32изн 9 32уст.пр 9 32рег 9 32изм 9 32смещ 2.
1,2
В мелкосерийном и среднесерийном производствах при выполнении кон
кретной операции обычно используется только один экземпляр станочного при
способления. Поэтому его погрешность может быть определена как сумма си
стематической (Dизг.пр) и случайных погрешностей (wизн, wуст.пр) [9]:
1пр 2 3 изг.пр 4 12изн 4 12уст.пр .
(7.8)
Тогда выражение (7.2) (с учетом (7.3)–(7.8)) следует записать так:
Δ обр = 1,2 ω2м + ω2ув + ω2б + ω2зак + ω2изн + ω2уст.пр + ω2н + Δ изг.пр + Δ′сист ,
(7.9)
где 2 1сист — алгебраическая сумма всех систематических погрешностей, без
Dизг.пр;
12н 2 12рег 3 12изм 3 12смещ .
Подставив в зависимость (7.1) выражение (7.9) и учтя зависимость (7.4),
решим относительно его Dизг.пр:
2изг.пр 3 Tn 4 21сист 4
(7.10)
4 1,2 52м 6 52ув 6 52б 6 52зак 6 52изн 6 52уст.пр 6 52рег 6 52изм 6 52смещ .
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
163
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
7.2. СИСТЕМАТИЧЕСКИЕ ПОГРЕШНОСТИ
ОБРАБОТКИ
Примем во внимание следующие наиболее существенные и ча
сто встречающиеся систематические погрешности:
· погрешности станка, возникающие при изготовлении, сборке, монтаже и
эксплуатации Dс;
· погрешности, связанные с неточностью и износом Dинс режущего инстру
мента;
· погрешности, вызываемые тепловыми деформациями технологической си
стемы при нагреве DТ;
· погрешности, обусловленные деформациями технологической системы под
действием сил резания при обработке Dд.
Величина DТ обычно всегда имеет другой знак и меньше суммы погрешно
стей Dинс + Dд (предполагая, что погрешности, вызываемые тепловыми дефор
мациями технологической системы при нагреве DТ, в основном определяются
тепловыми деформациями инструмента). Поэтому суммарную систематическую
погрешность обработки для большинства случаев можно определить по фор
муле
Dсист = Dс + Dинс – DТ + Dд.
(7.11)
В каждом конкретном случае следует проанализировать возможные причи
ны возникновения систематических погрешностей, в том числе и тех, кото
рые не перечислены выше (например, погрешности теоретической схемы обра
ботки).
При необходимости каждая из погрешностей, включенная в выражение
(7.11), в свою очередь может быть представлена суммой составляющих погреш
ностей.
7.2.1. ПОГРЕШНОСТИ СТАНКА Dс
Погрешности оборудования в большинстве случаев оказывают влияние на
точность формы и расположения обрабатываемых поверхностей, в меньшей
мере — на точность размеров. Допустимые погрешности станков ограничива
ются нормами ГОСТ, которые определяют допуски ряда параметров и методы
проверки геометрической точности станков в ненагруженном состоянии [30].
Допуски отдельных параметров станков приведены в таблице П.11. Однако
предпочтительно использовать подобные данные, взятые непосредственно из
паспорта конкретного оборудования.
7.2.2. ПОГРЕШНОСТИ, ВЫЗЫВАЕМЫЕ
ТЕПЛОВЫМИ ДЕФОРМАЦИЯМИ
ТЕХНОЛОГИЧЕСКОЙ СИСТЕМЫ ПРИ НАГРЕВЕ DТ
Будем считать, что эти погрешности связаны в основном с тепловыми де
формациями инструмента, предполагая, что оборудование работает в условиях
теплового равновесия (после разогрева станка), а температурные деформации
заготовки не значительны.
164
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
При оценке влияния температурных деформаций токарных резцов на по
грешность DT можно выделить несколько случаев [24], [25].
1. Основное время Tо больше времени работы резца до наступления тепло
вого равновесия (10–20 мин), а время перерывов Tп настолько велико, что ре
зец успевает остыть до начальной температуры (Tп » Tв > Tо); Tв — вспомога
тельное время.
Воспользуемся эмпирическими зависимостями [21]:
1) для обработки чугуна СЧ21 твердостью НВ180 резцами ВК6
1T 2 1lр 2 54
Lр 0,78 0,72 0,5
V S t , мкм;
F
2) для обработки стали sВ = 60 кг/мм2 (600 МПа) резцами Т15К6
1T 2 1lр 2 120
Lр 0,23 0,45 0,7
V S t , мкм,
F
где Dlр — температурная деформация резца, мкм; Lр — вылет резца, мм; F —
площадь поперечного сечения резца, мм2; V — скорость резания, м/мин; S —
подача, мм/об; t — глубина резания, мм.
2. Основное время Tо меньше времени работы до наступления теплового
равновесия (Tо < 10 мин), а за время перерыва резец успевает остыть до началь
ной температуры (Tп » Tв > Tо).
Тогда
2T 3 2lр (1 1 e
1
То
4
).
3. Основное время Tо меньше времени работы до наступления теплового
равновесия (Tо < 10 мин). Резец за время перерывов в работе не успевает остыть
до начальной температуры (Tп » Tв < Tо).
Тогда
То
Т
1T 2 41lр
3 в,
То 4 Тв Тм
где Tм — время с начала работы до момента наступления теплового равновесия
(Tм = 10–20 мин).
При использовании обильного охлаждения СОТЖ полученные величины
следует уменьшить в 3 раза [22].
Для фрезерования DT можно принять равным 0,005–0,025 мм; для сверле
ния — 0,008–0,035 мм; для шлифования — 0,0005–0,005 мм.
7.2.3. ПОГРЕШНОСТИ, СВЯЗАННЫЕ С ИНСТРУМЕНТОМ Dинс
Ограничимся рассмотрением размерного износа инструмента, оказываю
щего доминирующее влияние на погрешность обработки. Для резцов при точе
нии величину размерного износа найдем по формуле
Dинс = 2И = 2Ио(L + Lд)/1000, мкм,
(7.12)
где И — размерный износ; Ио — относительный износ, мкм/км; L — длина
пути резания, м; Lд = 1000 — дополнительный путь резания, м.
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
165
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
При точении путь резания можно определить по формуле
V 12 31 D 1l1 N
L4
4
,
(7.13)
1000 1000 1 S
где V — скорость резания, м/мин; t — продолжительность работы инструмен
та, мин; D, l — диаметр и длина обрабатываемой поверхности, мм; N — число
обработанных заготовок; S — подача, мм/об.
Величину относительного износа можно определить по справочным табли
цам [21] или рассчитать по эмпирическим формулам. Допускается значение
относительного износа принимать по таблице 7.1 [30].
1 2 3 4 5 6 2 7 89 7
12345467589 78 7548
28 42
7
4 586 82
9 77 4 752 78 628 42 2 7 4 586
4 722832 677 628 42 2
8 7548
7 4582!
582 9
9 4 75 73 4 87
" 4732
582 9
2!
82
44 666
# $ %& '()*+,,
123425
367895
367895
5
5
1 3495
895
9825
5
5
875
8 35
5
5
5
8
5
5
1
425
1 4 35
5
45
5
2 5
5
5
45
5
78 5
8 95
5
5
95
5
5
5
425
5
495
5
8 35
4 5
5
8 35
45
5
5
25
25
9825
5
5 255555 !"#5$%#&5'(5) '%65 15*5 338
2335+,55-'%#5.%5 3389335/0/15'(5)$%6515*538 335+,55
-'%#5 .%5 338335/0/15 25 )65 35 78375 5 -'%#5 .%5 38
35/0/15 5 %5.-)5)5535 7 89335'%'%5-5'-/5'$!5
Подобные данные, касающиеся относитель
ного износа фрез, в технической литературе
встречаются редко. Поэтому погрешности, свя
занные с износом фрез, в первом приближении
можно определить из схемы (рис. 7.1):
Dинс = И = Из × tga,
Рис. 7.1
Схема для расчета размерного
износа
166
Powered by TCPDF (www.tcpdf.org)
(7.14)
где И — размерный износ; Из — износ по зад
ней поверхности; a — задний угол режущей
кромки.
Зависимостью (7.14) легко воспользоваться,
если имеются экспериментальные данные, ка
сающиеся износа по задней поверхности режу
щих кромок фрез, которые, например, за пери
од стойкости составляют [32]:
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
· для концевых фрез — 0,45–0,55 мм;
· для торцовых фрез — 0,8–1,0 мм;
· для дисковых и цилиндрических фрез — 0,4–0,5 мм.
Такие значения износа по задней поверхности являются предельно допу
стимыми и служат критерием периода стойкости.
Задний угол a принимается равным 12–15°, если максимальная толщина
срезаемого слоя металла меньше 0,08 мм, что соответствует чистовому фрезе
рованию. В противном случае a = 18–20° [30]. Для большинства обрабатывае
мых материалов рекомендуются твердосплавные фрезы, имеющие a = 18–20°,
а быстрорежущие — a = 16–22° [32]. Предпочтительно значения параметров
Из, a принимать, используя экспериментальные данные, имеющиеся в техни
ческой литературе, например [28], [30]–[32] и др.
Для снижения погрешности, связанной с износом, рекомендуется:
· уменьшать продолжительность работы инструмента;
· увеличивать подачу;
· назначать 1–4 подналадки за период стойкости.
Если за период стойкости назначено К подналадок, то погрешность будет
равна износу И¢ инструмента за время его работы между подналадками:
1
1 2инс 3 И2 3 инс .
(7.15)
К 41
7.2.4. ПОГРЕШНОСТИ, ВЫЗВАННЫЕ
ДЕФОРМАЦИЕЙ ТЕХНОЛОГИЧЕСКОЙ СИСТЕМЫ
ПОД ДЕЙСТВИЕМ СИЛ РЕЗАНИЯ Dд
При неизменных жесткости (или податливости) и нормальной составляю
щей Py силы резания возникают постоянные деформации технологической си
стемы, которые легко учитываются при наладках. Погрешность, вызванная
переменной величиной Py, например за счет разной величины припуска и твер
дости материала обрабатываемой заготовки, учитывается уровнем мгновенно
го рассеяния (см. п. 7.3.1). Если жесткость (или податливость) технологиче
ской системы изменяется, например вдоль обрабатываемой поверхности, то
возникают переменные деформации. Их появление обусловливает образование
погрешности формы. В общем случае для фрезерных и строгальных станков
такую погрешность можно определить по формуле
Dд = Py(wmax – wmin), мкм,
(7.16)
где wmax, wmin — максимальная и минимальная податливости технологической
системы по длине обработки, мкм/Н; Py — нормальная (радиальная) состав
ляющая силы резания, Н.
Для станков токарной и шлифовальной групп погрешность, найденная по
формуле (7.16), удваивается, когда речь идет о диаметральных размерах.
Если аналитическая оценка w max и w min затруднена, то допускается (w max –
– wmin) априорно (по согласованию с преподавателем) принимать по таблице 7.2.
1234256789 832 62835 648
725589324865 4 8 4 678
823425628
1 12388114588
12
2
32
12
42
42
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
52
12
62
42
72
1 2
1 2 3 4 5 6 2 7 89 7
82
4 2
92
1
2
167
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
7.3. СЛУЧАЙНЫЕ ПОГРЕШНОСТИ
Рассмотрим отдельные составляющие случайной погрешности
для расчета погрешности изготовления приспособления.
7.3.1. МГНОВЕННОЕ РАССЕЯНИЕ w м
Величину wм можно рассчитать, используя зависимости, имеющиеся в ли
тературе [21], [28]. Допускается принимать wм по таблице 7.3.
1 2 3 4 5 6 2 7 89 7
1234563346789
6 3 67 789 375
7448 4593
457448 4593
7
1 177
7
123456789 463 9
9
48 5942 23 9 9
9
9
9
9
9
9
9
1234562582856789 463 9 94 24 7 9
48 5942 23 9 9
9
9
9
9
9
9
9
!9
"58856789 463 9
9
# $246789 463 9
9
9
Для станков класса точности П и выше принимают меньшие значения wм.
Для сверления мгновенное рассеяние представляет собой погрешность, свя
занную с уводом инструмента при обработке. Она рассмотрена в п. 7.3.2.
7.3.2. ПОГРЕШНОСТИ, СВЯЗАННЫЕ
С УВОДОМ ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ, w ув
В большинстве случаев эта погрешность имеет место при сверлении отвер
стий.
При сверлении без кондуктора для ее определения используется формула
(рис. 7.2) [39]
1ув 2 С2о 3 (4 у 5 l)2 ,
(7.17)
где Со — смещение оси отверстия (табл. 7.4); Dу — удельный увод (табл. 7.4);
l — длина обрабатываемого отверстия, мм.
В большинстве специальных приспособлений предусматриваются элемен
ты для направления, а также определения положения или траектории переме
щения обрабатывающего инструмента (сверл, зенкеров, разверток) в виде кон
168
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 7.2
Схема для расчета увода сверла при
сверлении
1 2 3 4 5 6 2 7 89 7
123456789
39 3 9
9
1234
32784
7827 4
7 2184
182 84
29119 9336 39 9 3 899 9 3436
456739 349
1199
299
5674
7694
7614
86 4
8694
784
7 4
584
5 4
584
дукторных втулок, копиров и др. Другими
словами, эти приспособления обеспечивают
как ориентацию инструмента, так и умень
шение его увода при обработке. Последнее
особенно актуально для сверления отверстий
на наклонных криволинейных поверхностях,
при значительных шероховатости и волни
стости поверхностей, при анизотропии фи
зикомеханических свойств обрабатываемо
го материала, включая поры, неоднородно
сти и др.
Такими приспособлениями являются кон
дукторы. Для них наиболее приемлемо вы
полнять расчет точности положения отвер
стия в кондукторной плите Lконд, обеспе
чивающего точность размера заготовки Lзаг
(рис. 7.3).
При использовании кондукторов возни
кает погрешность за счет: эксцентричности
E1 наружной и внутренней поверхностей по
стоянной втулки, запрессованной в кондук
торную плиту; зазора S1 между сменной и
постоянной втулками при их смещении друг
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
9
3492494 9 3436 9
1199
299
7634
7614
7684
8694
4
784
7 4
584
5 4
4
Рис. 7.3
Схема для расчета погрешности,
связанной с уводом сверла при
использовании направляющих
элементов
169
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
относительно друга (рис. 7.3б); эксцентричности E2 наружной и внутренней
поверхностей сменной втулки; зазора S2 между отверстием сменной втулки и
инструментом при их смещении друг относительно друга (рис. 7.3б); перекоса
инструмента (a — угол перекоса (рис. 7.3б)) относительно сменной втулки в
связи с зазором S2, равного
S 1 (h 2 l)
,
3п 4 2
(7.18)
H
где h — зазор между торцом втулки и заготовкой, его принимают равным
0,3–1 диаметра инструмента в зависимости от глубины обрабатываемого отвер!
стия и условий удаления стружки; l — глубина обрабатываемого отверстия;
H — длина сменной втулки.
Тогда максимальную погрешность, связанную с уводом инструмента при
использовании направляющих элементов, можно найти по формуле
S
S
3ув.max 4 25 max 4 2 E1 6 1 6 E2 6 2 6 5 п 4
2
2
(7.19)
2S2 (h 6 l)
4 2( Е1 6 Е2 ) 6 S1 6 S2 6
,
H
где Dmax — максимальное смещение инструмента от номинального положения.
Эту зависимость можно применять в тех случаях, когда обрабатываемое
отверстие находится на наклонной или криволинейной поверхности, что обес!
печивает практически однозначный увод сверла в направлении размера Lзаг
при значительных волнистости и шероховатости, существенной неоднородно!
сти обрабатываемого материала и др. При отсутствии таких особенностей веро!
ятность события, при котором векторы всех рассматриваемых погрешностей в
момент обработки суммируются арифметически, не значительна. Поэтому, вве!
дя коэффициенты, учитывающие наибольшие вероятности [11], формула (7.19)
будет иметь вид
(h 1 l)
,
2ув 3 2K1 ( Е1 1 Е2 ) 1 K2 (S1 1 S2 ) 1 2K3 S2
(7.20)
H
1
2
где K1, K2, K3 — коэффициенты, учитывающие наиболее вероятную величину
эксцентриситетов, зазоров и перекоса инструмента (табл. 7.5).
1 2 3 4 5 6 2 7 89 7
12344565789
59 57 85277 7298 7 3678955979
2 5 772 589 7892
2829 28 92
1234567859
28859
11
12
13
Максимальные зазоры S1 и S2 определим по формулам:
S1 = Dmax – Dmin;
S2 = dmax – dmin,
(7.21)
(7.22)
где Dmax, Dmin — максимальный диаметр отверстия постоянной втулки и мини!
мальный наружный диаметр сменной втулки; dmax, dmin — максимальный диа!
метр отверстия сменной втулки и минимальный диаметр инструмента, исполь!
зуемого для обработки.
170
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Для кондукторных втулок в начале эксплуатации зазоры S1 и S2 будут оп
ределяться только допусками на изготовление и их положением относительно
соответствующих номинальных размеров. При эксплуатации рабочие поверх
ности кондукторных втулок изнашиваются, зазоры S1 и S2 увеличиваются.
С учетом этого формулы (7.21), (7.22) запишем в следующем виде:
S1 = DDп + DDсм;
(7.23)
S2 = Ddсм + Td,
(7.24)
где DDп, DDсм — допустимые отклонения от номинального диаметра постоян
ной и сменной втулок при эксплуатации; Ddсм — допустимое отклонение от
номинального диаметра отверстия сменной втулки при эксплуатации; Td —
допуск на изготовление инструмента (определяется по таблицам справочни
ков, обычно равен 0,3 допуска диаметра отверстия после обработки таким ин
струментом).
Рекомендации по допустимым отклонениям в связи с износом кондуктор
ных втулок приведены в таблице 7.6. Очевидно, что износ втулок сопровожда
ется снижением точности обработки с использованием кондукторов. Поэтому
допустимые величины износа назначают с учетом точности размера заготовки
Lзаг (рис. 7.3). Однако считается не рациональным, если срок эксплуатации
кондукторных втулок ограничивается уровнем износа меньшим, чем допусти
мые максимальные отклонения при изготовлении, увеличенные на 50%.
1 2 3 4 5 6 2 7 89 7
1234526782592 74 8 592 4 34626 4 645669 752 4
3462 43 3 8 346783 469 843
7 6 26 2 26324 4 282 !52 1 2" 55
121" 55
1223" 55
1123" 55
1234
54
676182676964
54
32 4
54
6761 26769 4
54
2164
676182676364
676 62671684
676182676364
1621 4
6761 2676384
676 32671 64
6761 26763 4
1 2364
676 62676394
676
26713 4
6761 2676 4
36264
676 3267684
6763326714
676 62676 4
62864
676 8267684
54
676 32676 4
862 84
676
54
676 8267684
2676 4
7.3.3. ПОГРЕШНОСТЬ БАЗИРОВАНИЯ w б
Погрешность базирования возникает в тех случаях, когда технологическая
и измерительная базы не совпадают. Она может быть вызвана также особенно
стями формы базовых поверхностей заготовки и установочных элементов при
способлений.
Примеры определения wб приведены в литературе [9], [21], [25], [26], [28],
[30].
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
171
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
7.3.4. ПОГРЕШНОСТЬ ЗАКРЕПЛЕНИЯ w зак
Погрешность закрепления wзак можно определить аналитически для про
стых случаев. Обычно wзак принимаются по таблицам технологических спра
вочников [5], [16], [21], [25], [30].
7.3.5. ПОГРЕШНОСТЬ, ВЫЗВАННАЯ
ИЗНОСОМ УСТАНОВОЧНЫХ ЭЛЕМЕНТОВ
ПРИСПОСОБЛЕНИЯ w изн
Эту погрешность можно определить по формулам [9], [16], [34]:
· для опор с малой поверхностью контакта
1изн 2 И 2 31 N (мкм);
(7.25)
· для опор с развитой поверхностью контакта
wизн = И = b2 × N (мкм),
(7.26)
где И — размерный износ опоры, мм; b1, b2 — постоянные (выбираются по таб
лице 7.7); N — количество установок в приспособлении и снятий с него в год.
1 2 3 4 5 6 2 7 8987
1234526789
6 652 8186818783642832 428 552 8
3563832 428 552 8
32 4258
5528
368
88 !8
'
123435647282967
7 2 2 27
"5 658
368#$868%8
58
& 9658
558&38
68558&38
23&3%8
6 652818
7
7
7
7
7
7
7
7
9 4527
7
7
7
7
8 2 27
7
7
7
7
967 897! "#52 47
# 2"2 272$9#$2"#5567
$##%7
&7
'7
&7
&(7
# )*6792$34 47
94#5564%7
7
7
7
'7
4934 27
'
6 652818
# "56728295647
7
7
7
&7
7
7
7
7
# )*67* 5+934 47
7
7
7
7
7
7
7
&7
5 25 ,7-2 ).475#345/717717895#0" /7+ /7$2 447"/14 627! 2 79#$2"67
! "#52 235627 3 445"2 7 827 5# 9!47 8!"7 + #7 944575482+ 152 27 25"#"#7 7 #$9#4
52!7+4 " 07# 2"2 ,7
172
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
7.3.6. ПОГРЕШНОСТЬ УСТАНОВКИ ПРИСПОСОБЛЕНИЯ
НА СТАНКЕ w уст.пр
Для токарных, зубофрезерных и других станков погрешность установки
вращающихся приспособлений (наиболее часто это оправки) зависит от точно!
сти их базирования в конусном отверстии шпинделя, в центральном отверстии
поворотного стола, на центрирующем пояске шпинделя или планшайбы стан!
ка и т. д.
Если приспособление выверяется относительно стола станка или режущего
инструмента при настройке, то wуст.пр может быть принята равной 0,005–0,02 мм
[22].
Для исключения выверки, которая
требует значительных затрат време!
ни, во многих случаях используют на!
правляющие шпонки или установочные
пальцы (для фрезерных, строгальных,
расточных и др. станков), входящих в
Т!образные пазы или отверстия стола
станка. Тогда погрешность установки
приспособления возникает за счет пе!
рекосов, вызванных зазорами между
Рис. 7.4
направляющими шпонками приспособ! Схема для расчета погрешности установки
приспособления на столе станка:
ления и боковыми сторонами Т!образ!
l — расстояние между направляющими шпонка!
ных пазов стола станка. Максимальная ми; TШ — допуск на ширину Ш направляющих
шпонок; TП — допуск на ширину П T!образного
величина зазора равна (рис. 7.4)
S = TП + TШ ,
(7.27)
паза станка; S — наибольший зазор между на!
правляющими шпонками приспособления и Т!об!
разным пазом стола станка; a — угол перекоса.
где TП, TШ — допуски на ширину паза станка и направляющих шпонок соот!
ветственно.
В этом случае погрешность установки приспособления на станке можно
определить по формуле
2уст.пр 3
L1S
,
l
(7.28)
где L — длина обрабатываемой поверхности; l — расстояние между направ!
ляющими шпонками; S — максимальный зазор.
7.3.7. ПОГРЕШНОСТЬ РЕГУЛИРОВАНИЯ
ПОЛОЖЕНИЯ ИНСТРУМЕНТА w рег
Погрешность регулирования положения инструмента при настройке зави!
сит от точности используемых при настройке регулировочных средств (лим!
бов, индикаторов, упоров и др.). Поэтому wрег можно принимать равной цене
деления регулировочного устройства или предельной погрешности измеритель!
ного инструмента, с помощью которого регулируют положение режущего ин!
струмента [30].
Для отдельных случаев wрег приведены в таблице 7.8.
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
173
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
1234567289 453
282 453
123456783545359 5
9 5
427 4 7 8282
427 8972
283
26838283
3
2926838283
429923 1 123 3
3
453
3
7.3.8. ПОГРЕШНОСТЬ ИЗМЕРЕНИЯ w изм
Погрешность измерения принимается равной предельной погрешности ис
пользуемого универсального измерительного инструмента при настройке. Для
некоторых измерительных средств значения погрешности измерения wизм при
ведены в таблицах П.12 и П.13.
7.3.9. ПОГРЕШНОСТЬ СМЕЩЕНИЯ w смещ
Погрешность смещения центра группирования размеров пробных загото
вок относительно середины поля рассеяния имеет место только при настройке
станка по пробным заготовкам с использованием универсальных измеритель
ных инструментов. Эта погрешность определяется по формуле
1смещ 2
1м
,
m
(7.29)
где wм — мгновенное рассеяние (см. п. 7.3.1); m — число пробных заготовок,
используемых при настройке (обычно m = 2–8).
7.4. ПРИМЕРЫ РАСЧЕТА
ТОЧНОСТИ ИЗГОТОВЛЕНИЯ
СТАНОЧНЫХ ПРИСПОСОБЛЕНИЙ
ПРИМЕР 7.1
Заготовка 1 обрабатывается набором фрез на настроенном горизонтально
фрезерном станке согласно операционному эскизу (рис. 7.5). Фрезеруются пло
скости А, Б, В. Базовые поверхности Г и Д заготовки контактируют с опорными
пластинами 2 и 3, закрепленными на корпусе 4 приспособления. На столе станка
приспособление ориентируется направляющими шпонками 5.
При обработке должно быть обеспечено получение размеров 8±0,1, 24h12 и
35h11. Обрабатываемые плоскости А и В должны быть параллельны плоскости
Г, а плоскость Б параллельна плоскости Д. Допуски параллельности на опера
ционном эскизе не заданы, значит отклонения от параллельности ограничива
ются полями допусков соответствующих размеров. Кроме того, плоскость Б
должна быть перпендикулярна плоскости Г. Допуск перпендикулярности не
указан. Его величина может быть установлена по таблице П.14. Она равна
0,06 мм. Перпендикулярность остальных плоскостей относительно баз схема
базирования не обеспечивает.
174
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 7.5
Операционный эскиз:
а — схема приспособления; б — для фрезерования заготовки на горизонтальнофрезерном станке.
Определим влияние параметров точности приспособления на точность каж
дого упомянутого параметра заготовки. Размер 8±0,1 обеспечивается исключи
тельно инструментами и их настройкой. Схема базирования и точность при
способления не влияют на точность этого размера. На остальные упомянутые
выше параметры заготовки точность изготовления приспособления оказывает
существенное влияние:
1) размер 35h11 и параллельность плоскостей А и В относительно плоско
сти Г, перпендикулярность плоскостей Б и Г между собой зависит от парал
лельности установочной плоскости Г¢ опорных пластин 2 относительно устано
вочной поверхности Ж корпуса 4;
2) размер 24h12 и параллельность плоскости Б относительно Д зависят от
отклонения от параллельности рабочей (установочной) плоскости Д¢ опорной
пластины 3 относительно боковых поверхностей Е направляющих шпонок 5
приспособления.
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
175
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Определим допуск параллельности плоскости Г¢ опорных пластин 2 относи
тельно установочной поверхности Ж корпуса 4 из условия обеспечения точно
сти размера 35h11 (–0,16), а равно из условия параллельности плоскостей А и В
относительно Г, так как допуски этих параметров совпадают.
Найдем отдельные составляющие суммарной погрешности, сохранив их
прежнюю нумерацию (см. п. 7.2 и 7.3).
1. Погрешность станка. Принимается во внимание допуск параллельности
рабочей поверхности стола направлению его продольной подачи (табл. П.11).
На длине хода до 400 мм допуск составляет 0,02 мм. В нашем случае длина
хода равна 50 мм.
Тогда
50 1 0,02
2с 3
3 0,0025 мм.
400
2. Примем величину погрешности, вызванной тепловыми деформациями
DT = 0,016 мм.
3. Погрешность, связанная с износом инструмента. Будем считать, что об
работка выполняется цилиндрической твердосплавной фрезой, задний угол
a = 18°, износ по задней поверхности за период стойкости Из = 0,45 мм.
Тогда
Dинс = Изtga = 0,45 × tg18° = 0,146 мм.
Найденная величина сопоставима с допуском на обработку. Для ограниче
ния этой погрешности введем две подналадки за период стойкости фрезы. То
гда в течение промежутка времени между подналадками погрешность, вызван
ная износом, будет равна
2 1инс 3
Иинс 0,146
3
3 0,049 мм.
m 41 2 41
4. Погрешности, вызванные деформациями технологической системы под
действием сил резания. Будем считать, что изменение жесткости технологиче
ской системы незначительно. Тогда Dд = 0.
5. Мгновенное рассеяние. Согласно таблице 7.3 примем wм = 0,015 мм.
6. Погрешность, связанная с уводом инструмента, при фрезеровании не
имеет места wув = 0.
7. Погрешность базирования. Измерительная и технологическая база (рис.
7.5а) совпадают, поэтому wб = 0.
8. Погрешность закрепления. Согласно [5], [11] погрешность закрепления
при базировании на предварительно обработанную поверхность при использо
вании приспособления с пневмозажимом составляет wзак = 0,05 мм.
9. Погрешность, вызванная износом установочных элементов приспособле
ния wизн. Воспользуемся формулой (7.26) и таблицей 7.7, считая N = 4000 уста
новок, а b2 = 0,0025,
wизн = b2 × N = 0,0025 × 4000 = 10 мкм = 0,01 мм.
10. Погрешность установки приспособления на станке. Примем во внима
ние, что имеет место беззазорный, надежный контакт приспособления с по
верхностью стола станка. Поэтому можно считать wуст.пр = 0.
176
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
11. Погрешность регулирования. Считаем, что регулирование выполняет
ся по лимбу с ценой деления 0,05 мм. Тогда wрег = 0,05 мм.
12. Погрешность измерения. Используя для наладки микрометр гладкий с
ценой деления 0,01 мм без теплоизоляции, согласно таблице П.12 получаем
wизм = 0,01 мм.
13. Погрешность смещения
1
0,015
1смещ 2 м 2
2 0,008 мм,
m
4
считая, что число пробных заготовок используемых при настройке, m = 4.
Подставим найденные значения в формулу (7.10) с учетом формулы (7.11):
1 изг.пр 2 0,16 3 (0,0025 3 0,016 4 0,049) 3
3 1,2 0,0152 4 0,052 4 0,012 4 0,052 4 0,012 4 0,0082 5 0,036 мм.
Полученное значение допустимой погрешности изготовления приспособле
ния (после сборки) обеспечивает выполнение размера 35h11 (–0,16) и тем более
параллельности плоскостей А и В относительно плоскости Г в течение времени,
равного одной третьей периода стойкости. Найденное значение погрешности
касается длины обрабатываемой плоскости, равной 50 мм, и может быть на
чертеже указано так: отклонение от параллельности поверхности Г¢ опорных
пластин 2 относительно установочной поверхности Ж корпуса 4 на длине 50 мм
не должно превышать 0,036 мм. Однако более целесообразно привести откло
нение от параллельности к длине базовой плоскости Г заготовки, равной длине
плоскости Г¢, образованной опорными пластинами 2. Тогда требуемый допуск
80 1 0,036
параллельности можно найти из соотношения
2 0,06 мм.
50
На сборочном чертеже приспособления такой допуск может быть указан и
так Рис. бн 81.
Зная допуск Т// параллельности поверхности Г¢ относительно установочной
плоскости Ж приспособления, можно определить соответствующие допуски
параллельности Т//a и Т//b между плоскостями, расстояние между которыми
определяется размером a корпуса 4 и размером b опорных пластин 2.
Во внимание примем соотношение
T// = T//a + T//b.
Тогда, с учетом размеров рабочих поверхностей и сложности деталей 4 и 2,
установим допуски параллельности их поверхностей, равными 0,04 и 0,02 мм
соответственно.
ПРИМЕР 7.2
Рассчитаем точность изготовления того же приспособления из условия обес
печения точности размера 24h12 (–0,21) и параллельности плоскостей Б и Д
между собой (рис. 7.5). Определим отдельные составляющие погрешности, не
комментируя погрешности, полученные в примере 7.1.
1. Погрешность станка. Следует принять во внимание допуск параллельно
сти боковых сторон паза стола направлению его перемещения на длине хода до
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
177
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
400 мм, равной 0,02 мм (табл. П.11). Так как при обработке заготовки длина
хода равна длине обрабатываемой поверхности и составляет 50 мм,
2с 3
50 1 0,02
3 0,0025 мм.
400
2. DT = 0,016 мм.
3. 2 1инс 3 0,049 мм.
4. Dд = 0.
5. wм = 0,015 мм.
6. wув = 0.
7. wб = 0.
8. wзак = 0,05 мм.
9. wизн = 0,01 мм.
10. Погрешность установки приспособления на станке. Воспользуемся фор
мулой (7.28) и, принимая во внимание, что длина обрабатываемой поверхности
L = 50 мм, наибольший зазор между направляющими шпонками 5 приспособ
ления и Тобразными пазами стола станка (посадка определяется размером
паза 12+0,035 и размером шпонки 12–0,035) будет равен S = 0,07 мм, расстояние
между шпонками l = 90 мм:
2уст.пр 3
L 1 S 50 1 0,07
3
3 0,039 мм.
l
90
11. wрег = 0,05 мм.
12. Для настройки станка вновь воспользуемся микрометром гладким с це
ной деления 0,01 мм. По таблице П.12 wизм = 0,005 мм.
13. wсмещ = 0,008 мм.
Значения погрешностей подставим в формулу (7.10) с учетом формулы (7.11)
1 изг.пр 2 0,21 3 (0,0025 3 0,016 4 0,049) 3
3 1,2 0,0152 4 0,052 4 0,012 4 0,0392 4 0,052 4 0,0052 4 0,0082 5 0,075 мм.
Рассчитанный допустимый уровень погрешности изготовления приспособ
ления обеспечивает получение размера 24h12 (–0,21) и тем более параллельно
сти плоскостей Б и Д между собой в течение одной третьей периода стойкости
фрезы. Он представляет собой допустимую величину отклонения от параллель
ности поверхностей Е и Д¢ приспособления на длине обрабатываемой поверхно
сти, равной 50 мм. Приведем отклонение от параллельности к длине рабочей
поверхности опорной пластины 3, равной длине заготовки, т. е. 80 мм:
(0,075 × 80)/50 » 0,120 мм.
В ТУ на изготовление приспособления или непосредственно на сборочном
чертеже следует записать, что допуск параллельности плоскостей Е и Д¢ при
способления в сборе равен 0,12 мм.
Отклонение от параллельности плоскостей Е и Д¢ являются результатом:
· отклонения от параллельности плоскостей опорной пластины 3;
· отклонения от параллельности вертикальной плоскости приспособления И
и паза под шпонки 5 корпуса 4;
· отклонения от параллельности плоскостей шпонок 5.
178
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Очевидно, что сумма этих погрешностей не должна превышать найденного
допуска 0,12 мм на длине 80 мм. Регламентируем допуски на отдельные со
ставляющие с учетом сложности обеспечения названных параметров:
· допуск параллельности плоскостей опорной пластины 3 T//1 = 0,02 мм;
· допуск параллельности вертикальной плоскости приспособления И и паза
под шпонку T//2 = 0,05 мм на длине 80 мм;
· допуск параллельности шпонок 5 T//3 = 0,05/80 мм, выдержав соотноше
ние T//1 + T//2 + T//3 = 0,12/80.
ПРИМЕР 7.3
На токарноревольверном станке обрабатывается ступенчатое отверстие в
корпусе. Согласно первому варианту операционного эскиза (рис. 7.6а) при об
работке следует получить размеры 40±0,08, 60h12 (–0,3), A, Б, В, Г, Д, а также
Рис. 7.6
Операционные эскизы на токарноревольверную операцию обработки корпуса
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
179
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
симметричное положение ступенчатого отверстия относительно базовых поверх
ностей (указана условная база), размер между которыми, равный 125 – 1, вы
держан на предшествующих операциях. Допуск симметричности не приведен.
Так как определяющий размер 125 выполнен по h14, то соответствующий
допуск симметричности по таблице П.16 будет равен 1,2 мм в диаметральном
выражении.
Учитывая, что допуск симметричности сравнительно широк, можно реали
зовать другой вариант схемы базирования (рис. 7.6б), в которой использована
опорная контактная технологическая база взамен условной. В этом случае раз
мер указан от опорной базы до оси отверстия, номинальная величина которого
принята равной половине размера, соответствующего середине поля допуска
определяющего размера, т. е. 62,25 мм. Допуск названного размера принят рав
ным половине допуска симметричности в диаметральном выражении, что обес
печит требуемую точность симметричности.
Для реализации схемы базирования (рис. 7.6б) разработано специальное
приспособление (рис. 7.7).
Установочная база заготовки 1 контактирует с двумя опорными пластина
ми 2, направляющая база — с двумя опорными пластинами 3; опорная база —
с опорной пластиной 4. Пластины 2, 4 закреплены на угольнике 5, приварен
ном к планшайбе 6. На планшайбе 6 закреплены опорные пластины 3, а также
противовес 7 для уравновешивания дисбаланса, вызванного заготовкой и уголь
ником с пластинами. Приспособление навинчивается на резьбовой конец шпин
деля 8 токарноревольверного станка, центрируясь на цилиндрическом поя
ске 9 Æ 70h6(–0,019) шпинделя выточкой в планшайбе Æ 70H6(+0,019).
Рис. 7.7
Схема приспособления для обработки корпуса на токарноревольверном станке
180
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Точность изготовления приспособления оказывает влияние на точность сле
дующих параметров заготовки, получаемых на данной операции:
· размера 40±0,08. Он зависит от точности выполнения размера от оси выточ
ки в планшайбе 6 до плоскости, образованной опорными пластинами 2;
· параллельности оси ступенчатого отверстия заготовки относительно уста
новочной базы, определяемой параллельностью рабочих поверхностей опор
ных пластин 2 относительно оси выточки в планшайбе 6. Допуск парал
лельности не указан. Поэтому допустимое отклонение от параллельности
будет определяться допуском на размер 40±0,08;
· размера 62,25±0,3, точность которого зависит от точности выполнения раз
мера от оси выточки в планшайбе 6 до рабочей поверхности опорной пла
стины 4;
· размера 60h12 (–0,30) и параллельности плоскости Е относительно Ж, точ
ность которых определяется отклонением от перпендикулярности рабочей
поверхности опорных пластин 3 относительно оси выточки в планшайбе 6.
Так как допуск параллельности не указан, то его величина равна допуску
на размер 60–0,3;
· перпендикулярности плоскости Е относительно установочной базы заго
товки, которая зависит от параллельности плоскости опорных пластин 2
относительно оси выточки в планшайбе 6. Допуск перпендикулярности не
указан. По таблице П.14 его величина равна 0,16 мм;
· перпендикулярности оси ступенчатого отверстия относительно направляю
щей базы заготовки, которая зависит от перпендикулярности рабочей по
верхности опорных пластин 3 относительно оси выточки в планшайбе 6.
Допуск перпендикулярности не приведен, его величина по таблице П.14
равна 0,16 мм.
На точность размеров А, Б, В, Г, Д приспособление практически не влияет.
Определим допуск размера приспособления от оси выточки в планшайбе 6
до рабочей поверхности опорных пластин 2, гарантирующий получение разме
ра 40±0,08. Искомый допуск будет равен допуску параллельности между упо
мянутыми элементами.
Найдем отдельные составляющие погрешности, имеющие место при обра
ботке заготовки и влияющие на точность размера 40±0,08.
1. Погрешность станка. Во внимание следует принять биение цилиндриче
ского пояска шпинделя, центрирующего планшайбу приспособления. Соглас
но таблице П.11, эта величина для токарноревольверного станка с наиболь
шим диаметром изделия, обрабатываемого над станиной, в пределах 200–300 мм
составляет 0,010 мм. На точность размера 40±0,08 будет влиять эксцентрич
ность, равная половине величины биения. Тогда Dс = 0,005 мм.
Влияние отклонения от параллельности оси шпинделя относительно на
правления движения продольной подачи будем считать незначительным изза
сравнительно небольшой длины ступенчатого отверстия.
2. Тепловые деформации инструментов, используемых для обработки от
верстий заготовок, не влияют на точность исполнения размера 40±0,08:
DT = 0.
Влиянием тепловых деформаций остальных элементов технологической
системы также можно пренебречь.
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
181
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
3. Износ режущих инструментов не влияет на положение ступенчатого от
верстия относительно установочной базы
Dинс = 0.
4. При обработке отверстий сверлами, зенкерами или развертками дефор
мации технологической системы под действием сил резания, которые практи
чески уравновешиваются, равны нулю. Однако возможна погрешность при ра
стачивании отверстий за счет различной податливости шпинделя и главным
образом приспособления в разных направлениях. Будем считать, что при ра
стачивании составляющая силы резания не превышает 80 Н, а разница в по
датливостях соответствует 0,03 мкм/Н (вариант № 3, табл. 7.2). Тогда погреш
ность, вызванная деформацией технологической системы под действием сил
резания, составит:
Dд = 80 × 0,03 = 2,4 мкм = 0,0024 мм.
5. Мгновенное рассеяние. По таблице 7.3 примем wм = 0,02 мм.
6. Погрешность, связанная с уводом инструмента, для токарноревольвер
ной операции не имеет места
wув = 0.
7. Погрешность базирования равна нулю, так как измерительная и техно
логическая базы совпадают
wб = 0.
8. Погрешность закрепления. Считая, что установочная база шлифованная,
а приспособление имеет винтовые зажимы [6], [12], [14], [16]:
wзак = 0,080 мм.
9. Погрешность, вызванную износом опорных пластин 2, определим по фор
муле (7.26), считая N = 2000, а b2 = 0,002:
wизн = 0,002 × 2000 = 0,004 мм.
10. Погрешность установки приспособления на станке связана с максималь
ным зазором между цилиндрическим пояском 9 шпинделя и выточкой в план
шайбе, зная допуски размеров этих поверхностей (см. рис. 7.7), найдем
Smax = 0,019 + 0,019 = 0,038 мм.
Смещение Dсм приспособления относительно оси шпинделя в этом случае
составит:
S
0,038
1 см 2 3уст.пр 2 max 2
2 0,019 мм.
2
2
11. Погрешность регулирования. Величина wрег = 0, так как для размера
заготовки 40±0,08 регулирование не производится.
12. Погрешность измерения. На размер 40±0,08 станок не настраивается, по
этому wизм = 0.
13. Погрешность смещения. Настройка на размер 40±0,08 не производится,
поэтому wсмещ = 0.
182
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Найденные значения подставим в формулу (7.11) и с учетом формулы (7.10)
получим
1 изг.пр 2 0,16 3 (0,005 4 0,0024) 3 1,2 0,022 4 0,082 4 0,0042 4 0,0192 5 0,051мм.
Найденные значения погрешности размера от оси выточки в планшайбе 6
до рабочей поверхности опорных пластин 2 позволяет назначить допуск на этот
размер. Назначим его равным 0,05 мм. Тогда упомянутый размер на чертеже
приспособления должен быть указан так: 40±0,025.
Исполнение размера 40±0,025 приспособления гарантирует не только выпол#
нение размера 40±0,08 заготовки, но и допуска параллельности оси ступенчатого
отверстия и перпендикулярности плоскости Е относительно плоскости устано#
вочной базы заготовки. Это следует из сравнения приведенных выше допусков
названных параметров с допуском размера 40±0,08.
Точность размера приспособления 40±0,025 определяется при сборке и зави#
сит от точности толщины a1 опорной пластины 2 и точности расстояния a2 от
плоскости угольника 5, на которой устанавливается пластина 2, до оси выточ#
ки в планшайбе 6 (рис. 7.7). Назначим допуски этих размеров так, чтобы их
сумма не превышала допуск размера 40±0,025, приняв во внимание сложность
изготовления:
· допуск размера a1 — 0,01 мм;
· допуск размера a2 — 0,04 мм.
Аналогично можно определить допуск на размер 62,25 мм приспособления,
а также допуск перпендикулярности рабочей поверхности опорных пластин 3
относительно оси выточки в планшайбе 6.
ПРИМЕР 7.4
Шлифуется тороидальная поверхность керамической заготовки в виде дис#
ка на станке WDM#15. Для шлифования согласно операционному эскизу (рис.
7.8б) разрабатывается станочное приспособление — оправка. Отверстие диска
является центрирующей базой, а его торец — установочной. Согласно первому
Рис. 7.8
Схема оправки (а) и операционный эскиз шлифовальной операции (б)
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
183
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
варианту заготовка устанавливается на короткую цилиндрическую поверхность
оправки диаметром 20h6 и закрепляется гайкой.
Оправка навинчивается на резьбовой хвостовик шпинделя станка, базиру
ясь своей конической поверхностью на коническую поверхность шпинделя.
Точность изготовления оправки определяет точность следующих параметров
заготовки, обеспечиваемых на этой операции:
1) радиального биения тороидальной поверхности диска относительно от
верстия. Допуск биения равен 0,02 мм. Уровень биения заготовки прямо зави
сит от биения цилиндрической посадочной поверхности оправки диаметром
20h6 относительно ее конической поверхности, посредством которой оправка
устанавливается на шпиндель станка. Кроме того, рассматриваемый параметр
косвенно зависит от перпендикулярности торца оправки относительно оси ее
конической поверхности;
2) симметричности тороидальной поверхности относительно торцовых по
верхностей диска. Допуск этого параметра не указан. Его величина по табли
це П.16 равна 0,4 мм в диаметральном выражении, считая, что определяющий
размер (толщина диска) равен 9h14. Симметричность тороида относительно
торцовых поверхностей будет зависеть от перпендикулярности торцовой по
верхности, с которой взаимодействует торец диска при установке конической
поверхности отверстия. Следует заметить, что симметричность тороида будет
также определяться и точностью взаимного расположения торцов и оси отвер
стия заготовки, полученной на предыдущих операциях.
Определим допустимый уровень радиального биения цилиндрической по
садочной поверхности оправки относительно ее конической (базовой) поверх
ности для обеспечения допуска биения тороидальной поверхности диска, рав
ного 0,02 мм, относительно отверстия диаметром 20H7.
Определим отдельные составляющие погрешности.
1. Погрешность станка. Обработка выполняется на станке WDM15, соглас
но паспорту которого биение конической поверхности шпинделя не превышает
Dс = 0,003 мм.
2. Износ инструмента на биение обрабатываемой поверхности заготовки
практически не влияет Dинс = 0.
3. Погрешности, вызванные тепловыми деформациями, не оказывают влия
ние на интересующий нас параметр заготовки DT = 0.
4. Будем считать, что изменение податливости шпинделя в зависимости от
его углового положения пренебрежительно мало Dд = 0.
5. Мгновенное рассеяние примем равным (табл. 7.3) wм = 0,002 мм.
6. Отсутствие увода инструмента и направляющих элементов предполага
ет, что wув = 0.
7. Считая, что рабочая цилиндрическая поверхность оправки выполнена
по h5 (–0,011), а отверстие диска по H7 (+0,021), найдем погрешность базирова
ния, равную максимально возможному зазору между ними при установке
wб = 0,011 + 0,021 = 0,031 мм.
Сравнивая найденную величину погрешности (wб = 0,031 мм) с допуском
биения (TП = 0,02 мм), можно сделать вывод о том, что разрабатываемая конст
рукция оправки не обеспечит требований операционного эскиза к обрабатывае
184
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
мой заготовке (рис. 7.8). На этом можно было бы завершить оценку отдельных
составляющих погрешностей для данной конструкции, разработать другой ва#
риант оправки и начать определение составляющих погрешностей заново. Од#
нако завершим оценку всех составляющих погрешностей для этой конструк#
ции оправки для сравнения и анализа новой. При этом большинство их них
будут одинаковы для обоих вариантов.
8. Погрешность закрепления. Принимая во внимание направление дейст#
вия сил при закреплении заготовки, будем считать эту погрешность для жест#
кой оправки весьма малой и примем wзак = 0.
9. Погрешность, вызванную износом установочного элемента оправки, т. е.
рабочей цилиндрической поверхности, найдем по формуле (7.26), считая N =
= 2000, а b2 = 0,001:
wизн = b2 × N = 0,001 × 2000 = 2 мкм = 0,002 мм.
10. Погрешность установки оправки на шпиндель станка. Согласно паспор#
ту станка эта величина может быть равной 0,003–0,010 мм. Примем, что
wуст.пр = 0,006 мм.
11. Погрешность регулирования. Настройка станка по интересующему нас
параметру не производится wрег = 0.
12. Погрешность измерения. Настройка станка по этому параметру не про#
изводится wизм = 0.
13. Аналогично п. 11 и 12 wсмещ = 0.
Для дополнительного подтверждения, сказанного выше (см. п. 7), найденные
значения погрешностей подставим в формулу (7.10) с учетом (7.11) и получим
1 изг.пр 2 0,020 3 0,003 3 1,2 0,0022 4 0,0312 4 0,0022 4 0,0062 5 30,021мм.
Полученный результат подтверждает ранее сделанный вывод о том, что
обеспечить заданную точность обработки с использованием данной конструк#
ции оправки невозможно. Другими словами суммарная погрешность обработ#
ки существенно больше допуска параметра, точность которого должна быть
обеспечена при обработке.
В такой ситуации необходимо проанализировать отдельные составляющие
суммарной погрешности и принять меры по их значительному уменьшению.
В нашем случае доминирующими погрешностями являются погрешность бази#
рования заготовки и погрешность установки оправки на шпиндель станка. Для
уменьшения погрешности базирования следует уточнить схему базирования
(рис. 7.8), заменив материальную центрирующую базу на условную, и, соот#
ветственно, изменить конструкцию оправки. Заменим жесткую оправку на без#
зазорную оправку с упругими элементами гофрированного типа [30], для кото#
рой погрешность базирования будет равна нулю (wб = 0), но появится погреш#
ность закрепления wзак = 0,004 мм (для заготовки с отверстием H7).
Остальные условия сохраним прежними. Повторим расчет, учтя вышеска#
занное
1 изг.пр 2 0,020 3 0,003 3 1,2 0,0022 4 0,0042 4 0,0022 4 0,0062 5 0,008 мм.
Это значит, что биение рабочей посадочной поверхности оправки относи#
тельно конической поверхности не должно превышать допустимой величины,
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
185
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
равной 0,008 мм. При этом условии биение тороидальной поверхности диска
относительно отверстия будет находиться в заданном допуске, равном 0,02 мм.
Такую точность оправки обеспечить сравнительно сложно даже в условиях со
временного инструментального производства.
В таком случае можно рекомендовать при наладке станка выполнять до
полнительное шлифование рабочей поверхности оправки (т. е. упругих эле
ментов гофрированного типа) после установки оправки на шпиндель станка, на
котором она будет в дальнейшем эксплуатироваться (обработка по месту).
После такого шлифования рабочей поверхности оправки можно считать,
что оправка является частью шпинделя (если оправку не снимать со шпинде
ля). Из этого следует, что оправка как отдельный элемент технологической
системы фактически отсутствует и ее точность практически не влияет на ре
зультаты обработки. Расчет оправки на точность теряет смысл. Однако остает
ся открытым вопрос: будет ли достигнута требуемая точность по радиальному
биению? В этом случае следует использовать проверочный расчет по формуле
(7.9). При расчете учтем следующие погрешности:
· мгновенное рассеяние wм = 0,002 мм;
· погрешность закрепления заготовки wзак = 0,004 мм;
· износ установочного элемента оправки wизн = 0,002 мм.
Тогда
1 обр 2 1,2 0,0022 3 0,0042 3 0,0022 4 0,006 мм 5 TП 2 0,020 мм.
Условие обеспечения точности обработки выполняется.
Точность по радиальному биению, достижимая для указанных условий,
находится в пределах 0,006 мм. В серийном и крупносерийном производствах
такой подход приемлем и находит широкое применение.
В мелко и среднесерийном производствах оправку снимают после обработ
ки партии заготовок. Повторное использование такой оправки возможно, если
при шлифовании ее рабочей поверхности на шпинделе станка обеспечено ради
альное биение по отношению к коническому отверстию, не превышающее най
денную ранее величину, т. е. Dизг.пр £ 0,008 мм.
Оценим точность такой оправки, рабочая поверхность которой обработана
непосредственно на шпинделе станка, для определения возможности ее повтор
ного применения после снятия. Используем формулы (7.2), (7.3), считая, что
при обработке оправки на шпинделе имели место погрешности:
· погрешность станка Dс = 0,003 мм;
· мгновенное рассеяние wм = 0,002 мм;
· погрешность закрепления wзак = wуст.пр = 0,006 мм.
Тогда
1 обр 2 1,2 0,0022 3 0,0062 3 0,003 4 0,011мм.
Из расчета следует, что после обработки оправки на шпинделе станка ради
альное биение ее рабочей поверхности относительно конического отверстия бу
дет находиться в пределах 0,011 мм. В то же время согласно выполненному
выше расчету предельная погрешность этого параметра для оправки не должна
превышать wизг.пр £ 0,008 мм. Из сравнения найденных величин следует, что
186
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
для упомянутых выше условий повторное использование такой оправки невоз
можно, так как биение рабочей поверхности оправки после шлифования на
шпинделе станка, равное 0,011 мм, превышает найденное допустимое значе
ние ее радиального биения (0,008 мм).
ПРИМЕР 7.5
Для сверления на радиальносверлильном станке отверстий диаметрами
12H10 (+0,07) и 8Н11 (+0,09) (см. операционный эскиз на рисунке 7.9) разра
ботан кондуктор, схема которого приведена на рисунке 7.10. Установочная база
заготовки 1 взаимодействует с двумя опорными пластинами 2, направляющая
Рис. 7.9
Операционный эскиз радиальносверлильной операции
Рис. 7.10
Схема кондуктора для сверления отверстий в заготовке
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
187
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
база — с опорной пластиной 3. Опорной базой является отверстие, которое кон
тактирует с коротким срезанным пальцем 4. Приспособление устанавливается
на столе станка и закрепляется.
Точность изготовления кондуктора оказывает влияние на точность следую
щих параметров заготовки, формируемых на данной операции (рис. 7.9 и 7.10):
1) размера 20±0,06. Он зависит от точности выполнения размера A от опор
ной пластины 3 до оси отверстий под кондукторные втулки в кондукторной
плите 5, эксцентричности втулок, зазора между втулками, зазора между смен
ными втулками и инструментами (см. рис. 7.3);
2) размера 25±0,1. Он зависит от точности выполнения размера Б от оси сре
занного пальца до оси отверстия в кондукторной плите под кондукторную втул
ку, эксцентричности втулок, зазора между втулками, зазора между сменной
втулкой и инструментом;
3) размера 40±0,15. Он зависит от точности выполнения размера В между
осями отверстий в кондукторной плите под кондукторные втулки для обработ
ки отверстий диаметром 12H10 и диаметром 8H11, эксцентричности втулок,
зазоров между втулками, зазоров между втулками и инструментами;
4) перпендикулярности осей обрабатываемых отверстий в установочной базе.
Она зависит от перпендикулярности осей отверстий в кондукторной плите плос
кости опорных пластин 2. Допуск перпендикулярности на операционном эски
зе не указан. Его величину определим по таблице П.14, считая, что толщина
обрабатываемой заготовки является короткой стороной прямого угла и выпол
нена по h14. Допуск равен 0,2 мм.
Следует заметить, что отклонение от перпендикулярности осей отверстий в
кондукторной плите плоскости опорных пластин 2 влияет также на точность
выполнения размеров 20±0,06, 25±0,1, 40±0,15. Это в настоящих расчетах не учтено.
Найдем отдельные составляющие погрешности, влияющие на точность ис
полнения размера 20±0,06.
1. Погрешность станка. При наличии направляющих элементов в виде кон
дукторных втулок влияние погрешности станка на точность этого параметра
пренебрежительно мало, можно принять Dс = 0.
2. Тепловые деформации инструмента не влияют на точность этого размера
DT = 0.
3. Износ режущего инструмента весьма мал и его можно не учитывать
Dинс = 0.
4. Величину погрешности, вызванной деформацией технологической си
стемы, примем равной нулю Dд = 0.
Однако деформации сверл возможны за счет различных значений сил реза
ния на режущих кромках изза погрешностей заточки, неравномерного износа
и др. Это приводит к уводу (смещению) инструмента и, соответственно, оси
обрабатываемого отверстия. Такая погрешность комплексно учтена в п. 6.
5. Мгновенное рассеяние при сверлении представляет собой увод сверла,
что учтено в п. 6. Поэтому wм = 0.
6. Определим погрешности, связанные с уводом сверла при обработке с ис
пользованием кондуктора, по формуле (7.20).
188
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Будем считать, что эксцентричность наружных и внутренних поверхностей
кондукторных втулок
E1 – E2 = 0,005 мм.
По таблице 7.6 найдем допустимые отклонения от номинальных диаметров
постоянной и сменной втулок при эксплуатации. Их величины примем мини
мальными, так как точность размера 20±0,06 сравнительно высока:
DDп = 0,017 мм; DDсм = 0,023 мм; Ddсм = 0,018 мм.
Допуск на изготовление диаметра сверла определим как 0,3 допуска на диа
метр обрабатываемого отверстия меньшей точности:
Td = 0,3 × 0,09 = 0,027 мм.
Зазор между торцом кондукторной втулки и заготовкой примем равным
h = 0,3 × 12 = 3,6 мм, а длину сменных втулок H = 25 мм. Коэффициенты k1, k2,
k3 примем по таблице 7.5.
Тогда
h3l
4ув 5 2k1 ( Е1 3 Е2 ) 3 k2 (S1 3 S2 ) 3 2k3 S2
5
H
5 2 6 0,4 6 (0,005 3 0,005) 3 0,35 6 (0,017 3 0,023 3 0,018 3 0,027) 3
3,6 3 16
3 2 6 0,2 6 (0,018 3 0,027) 6
5 0,052 мм.
25
1 2
7. Погрешность базирования равна нулю. Измерительная и технологиче
ская базы совпадают, wб = 0.
8. Погрешность закрепления определим, считая, что базовые поверхности
предварительно обработаны, а закрепление заготовки выполняется пневмати
ческим зажимом [10], [11], [14]
wзак = 0,04 мм.
9. Погрешность за счет износа опорных пластин 3 найдем по формуле (7.26),
предполагая N = 3000 шт., а b2 = 0,002:
wизн = 0,002 × 3000 = 6 мкм = 0,006 мм.
10. Точная ориентация кондуктора на столе радиальносверлильного стан
ка не имеет смысла. Поэтому wуст.пр = 0.
11. Регулирование при использовании кондуктора не производится. Поэто
му wрег = 0.
12. Станок не настраивается на размер 20±0,05. Отсюда wизм = 0.
13. По той же причине wсмещ = 0.
Полученные значения отдельных погрешностей подставим в формулу (7.10):
1 изг.пр 2 0,12 3 1,2 0,042 4 0,0062 4 0,0522 5 0,04 мм.
Найденная величина представляет собой допустимое значение погрешно
сти размера А кондуктора (на рисунке 7.3 размер Lзаг). Поэтому на чертеже
приспособления должно быть указано: 20±0,02. Этот размер является замыкаю
щим звеном в сборочной цепи и определяется толщиной a1 опорной пластины 3,
Расчет точности станочных приспособлений
Powered by TCPDF (www.tcpdf.org)
189
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
расстоянием a2 от уступа кондукторной плиты до оси отверстий под кондуктор
ные втулки.
Назначим допуски на эти размеры, учитывая сложность их получения:
a110,005 ; a210,015 ,
выполнив условие:
ТА 1 Та1 2 Та2 ,
где ТА , Та1 , Та2 — допуски соответствующих размеров. Если допуск на размер А
от плоскости опорной пластины до оси отверстий под кондукторные втулки
меньше 0,03 мм, то обычно возникают затруднения с изготовлением кондукто
ров. В таких случаях следует обосновано уменьшить отдельные составляющие
погрешностей, входящих в зависимости (7.10) и (7.20).
Аналогично может быть выполнен расчет точности размеров Б и В. При
расчете точности размера Б найденные выше составляющие погрешности долж
ны быть дополнены погрешностью базирования, вызванной зазором между сре
занным пальцем 4 и базовым отверстием заготовки 1. Обычно эта величина
принимается равной максимальному зазору. При обосновании точности разме
ра В исключается погрешность закрепления и погрешность за счет износа опор
ных пластин, а погрешность, связанная с уводом инструмента, удваивается.
190
Powered by TCPDF (www.tcpdf.org)
Глава 7
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
РАСЧЕТ
ДЕТАЛЕЙ ПРИСПОСОБЛЕНИЙ
НА ПРОЧНОСТЬ
Одним из основных качеств любого механизма, в частности
приспособления, является прочность, долговечность и надежность работы основ
ных деталей.
Повышение прочности и износостойкости деталей, а следовательно и всего
приспособления в целом, сопряжено с решением ряда сложных технологиче
ских проблем. Например, применение специальной термической и термохими
ческой обработки, поверхностного наклепа и износостойких покрытий позво
ляет в несколько раз повысить сроки службы деталей.
Наряду с увеличением сроков службы повышаются допускаемые нагрузки
на детали, что способствует уменьшению габаритов и веса приспособления.
На прочность деталей любых машин и механизмов влияют следующие фак
торы:
а) форма деталей, т. е. наличие резких изменений формы деталей, вслед
ствие изменения толщин стенок, размеров сечений, наличия отверстий, резь
бы, шпоночных канавок, круговых проточек и т. п.;
б) качество обработки и состояние поверхности. Имеющиеся на поверх
ности деталей риски и царапины, вызванные обработкой, представляют собой
острые микроскопические надрезы, у которых угол надреза a ® 0. Таким обра
зом риски и царапины являются поверхностными концентраторами напряже
ний, снижающими усталостную прочность деталей;
в) размер детали (масштабный фактор). Масштабный фактор учитывает
влияние абсолютных размеров детали на ее прочность;
г) характер нагрузки. Статическая, динамическая, знакопеременная и т. п.
8.1. УСЛОВИЯ, ОБЕСПЕЧИВАЮЩИЕ
ЦЕЛЕСООБРАЗНУЮ
КОНСТРУКЦИЮ ПРИСПОСОБЛЕНИЙ
Проектируемое приспособление должно соответствовать его на
значению. При проектировании приспособления необходимо обеспечить сле
дующие условия.
1. Условие прочности. Детали и узлы приспособления не только не долж
ны разрушаться, но и не должны испытывать остаточных деформаций, нару
шающих нормальную работу приспособления.
Расчет деталей приспособлений на прочность
Powered by TCPDF (www.tcpdf.org)
191
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
2. Жесткость деталей и узлов. Упругие деформации деталей не должны
превосходить допускаемых деформаций, обеспечивающих отсутствие вибра
ций, недопустимо наличие больших прогибов, а также нарушений правильно
сти монтажа узлов приспособления.
3. Долговечность и износостойкость деталей в течение определенных сро
ков их службы. Износостойкость деталей достигается термической (азотирова
ние, цементация, закалка) и механической (наклеп) обработкой трущихся по
верхностей, а также ограничением удельных давлений и контактных напря
жений. Кроме того, необходимо обеспечить нормальную смазку трущихся
поверхностей и отсутствие недопустимого нагрева деталей. Долговечность и
износостойкость деталей и узлов зависит также от правильности монтажа и
условий эксплуатации приспособления.
4. Технологические требования. Детали должны отличаться простотой фор
мы, позволяющей осуществлять изготовление их на наиболее простом оборудо
вании при возможно меньшей затрате рабочего времени и соблюдении необхо
димой степени точности обработки.
В целях уменьшения механической обработки следует широко применять
фасонный прокат, штамповку и сварку.
Детали должны проектироваться в соответствии с существующими госу
дарственными стандартами и по возможности быть взаимозаменяемыми.
Форма и размеры деталей должны обеспечивать простоту сборки и разбор
ки узлов приспособлений.
5. Безопасность, простота управления и обслуживания. Конструкция
приспособления должна обеспечить безопасность и легкость доступа к ее дета
лям для осмотра, удаления стружки, текущего ремонта, регулировки и смаз
ки. Управление приспособлением должно осуществляться без применения зна
чительных усилий.
6. Техникоэкономические требования. Габариты, вес деталей и всего приспо
собления в целом, а следовательно и расход материалов, должны быть возможно
меньшими, что особенно важно для относительно сложных переналаживае
мых приспособлений, приспособлений для станков с ЧПУ и ГПмодулей. Не
обходимо осуществлять строжайшую экономию цветных и сложнолегирован
ных материалов, уменьшая до минимума их расход и широко применяя менее
дефицитные материалы, в том числе и пластмассы.
Снижение стоимости приспособлений может быть достигнуто за счет при
менения одинаковых деталей и узлов в однотипных приспособлениях.
Требования, предъявляемые к рациональной конструкции приспособления,
противоречивы. Так например, требования прочности и жесткости деталей вы
зывают необходимость увеличения их размеров веса и расходов материалов.
Требование же экономичности приводит к необходимости уменьшить расход
материала и вес приспособления. Уменьшение габаритов и веса приспособле
ния при обеспечении надежности его работы требует применения высокопроч
ных материалов, что, в свою очередь, может вызвать увеличение стоимости
приспособления.
Указанные противоречия, возникающие при проектировании приспособ
ления, вызывают необходимость изыскания соответствующих материалов, а
также рациональных форм и размеров деталей. Эти противоречия могут быть
192
Powered by TCPDF (www.tcpdf.org)
Глава 8
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
разрешены лишь при применении современных методов расчета деталей на
прочность, учете реальных возможностей производства, знании технологиче
ских процессов производства и металловедения, а также на основе технико
экономических расчетов.
8.2. РАСЧЕТ ДЕТАЛЕЙ ПРИСПОСОБЛЕНИЙ
НА ПРОЧНОСТЬ
Прочность — одно из основных требований, предъявляемых к
деталям и приспособлениям в целом. Прочность деталей может характеризо
ваться по ряду частных коэффициентов запаса (надежность материала, сте
пень ответственности детали, точность расчетных зависимостей, действующие
силы, другие факторы, определяющие условия работы детали) или по номи
нальным допускаемым напряжениям. Вероятностные расчеты и расчеты на проч
ность по коэффициентам запаса могут использоваться в отдельных случаях для
высокоответственных деталей приспособлений и в исследованиях их надежно
сти. Они более точны, но очень сложны и трудоемки. Расчеты по номинальным
напряжениям менее точны, но значительно проще, доступнее, менее трудоемки,
полно отражены в справочной литературе и широко используются в инженерной
практике. Поэтому наибольшее внимание уделено методике этих расчетов.
С помощью расчета можно решать две задачи:
а) проверку на прочность существующих деталей путем сравнения факти
ческих напряжений с допускаемыми (проверочный расчет);
б) определение размеров сечений деталей приспособлений (предваритель
ный проектный расчет).
8.2.1. ОСНОВНЫЕ УРАВНЕНИЯ ПРОЧНОСТИ
Прочность детали обеспечена при условии s £ [s], где s — расчетное (или
фактическое) напряжение рассматриваемого опасного сечения детали; [s] —
допускаемое напряжение.
Основные уравнения прочности при простых деформациях:
· растяжение
P
1р 2 3 [1p ];
F
· сжатие
P
1с 2 3 [1с ];
F
· сдвиг (срез)
Q
1 2 3 [1];
F
· кручение
M
1к 2 к 3 [1к ];
Wp
· изгиб
M
1и 2 и 3 [1и ],
W
где P и Q — силы, действующие на деталь; Mк — крутящий момент; Mи — из
гибающий момент; F — площадь рассчитываемого поперечного сечения детали;
Расчет деталей приспособлений на прочность
Powered by TCPDF (www.tcpdf.org)
193
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Wp — полярный момент сопротивления сечения детали; W — осевой момент
сопротивления сечения детали.
Если известно допускаемое напряжение, например при растяжении, то до
пускаемые напряжения при других видах деформаций (для данной детали)
могут быть определены на основании следующих приближенных соотношений
(при прочих равных условиях).
1. Углеродистые конструкционные стали
1) при сжатии
[sс] = [sр];
2) при кручении (или сдвиге)
[tк] = (0,6–0,7)[sр];
3) при изгибе
[sи] = (1,2–1,5)[sр].
2. Серый чугун
1) при сжатии
[sс] = (2–2,5)[sр];
2) при сдвиге
[t] = [sр];
3) при кручении
· для круглого сечения
[tк] = [sр];
· для кольцевого круглого и полого сечения
[tк] = 0,9[sр];
· для эллиптического сечения
· для эллиптического и прямоугольного сечений
[tк] = 1,15[sр];
· для квадратного сечения
[tк] = 1,4[sр];
· для углового, коробчатого, крестообразного и двутаврового сечений
[tк] = (1,4–1,6)[sр];
4) при изгибе
· для круглого сечения
[sи] = (1,7–2,05)[sр];
· для прямоугольного сечения
[sи] = (1,4–1,7)[sр];
· для двутаврового сечения
[sи] = (1,2–1,45)[sр].
Уравнения прочности могут применяться при проектировочном и при про
верочном расчетах.
194
Powered by TCPDF (www.tcpdf.org)
Глава 8
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
При проектировочном расчете определяется величина и характер дейст
вия нагрузки, рассчитывается допускаемое напряжение, а затем рассматрива
ется уравнение прочности (например, при растяжении):
P
1 [2p ],
F
откуда определяется минимально допускаемая площадь рассматриваемого по
перечного сечения детали:
F1
P
.
2p
В некоторых случаях возникает необходимость увеличения найденных по
расчету размеров детали по конструктивным соображениям, как например,
для увеличения жесткости валов редукторов. В других случаях полученные по
расчету размеры деталей велики и не могут быть увязаны с размерами сопри
касающихся деталей. Тогда, в целях уменьшения размеров рассчитываемой
детали, необходимо изменить принятый ранее материал или технологию изго
товления и пересчитать допускаемое напряжение, а затем и соответствующие
размеры детали.
Часто размеры детали задаются на основании конструктивных соображе
ний или по опытным соотношениям размеров, выработанных практикой. По
сле конструирования детали производится проверочный расчет ее прочности.
При проверочном расчете определяется величина и характер действия на
грузки, а также рассчитываются допускаемые напряжения. Размеры детали
известны, и следовательно, может быть определено расчетное или действитель
ное напряжение
P
1р 2 .
F
Прочность детали обеспечена при условии:
sp £ [sp].
При расчете деталей вводится дополнительный коэффициент запаса или
запас прочности, уменьшающий опасное напряжение до величины допускае
мого напряжения [s], при котором обеспечивается нормальная работа детали.
Запас прочности:
n = n1 n 2 n3 .
Коэффициент n1 учитывает возможные последствия поломок деталей и ее
стоимость (табл. 8.1). Чем тяжелее возможные последствия поломки детали и
чем выше ее стоимость, тем меньше следует принимать допускаемое напряже
ние и, следовательно, бóльшим должен быть коэффициент запаса n1.
Коэффициент n2 учитывает влияние на прочность детали свойств стали в
зависимости от характера нагрузки (табл. 8.2).
Коэффициент n3, называемый расчетноконструкторским коэффициентом,
учитывает допущенные при проектировании неточности расчета, как то: не
точности в определении характера и величины действующих сил, неточности
расчетной схемы нагрузки деталей и т. п.
Расчет деталей приспособлений на прочность
Powered by TCPDF (www.tcpdf.org)
195
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
1234526789
6 652383338187853586 522868368
123452678118
258 5678
9685368
1234565472839 87 94
5368
3 8 6 68
37 53
87 94 737 53263 2 842
9422 3 2 5328723
53
47!37 53
5368
8 6 68
3
3
3
3
3
"3
1 2 3 4 5 6 2 7 89 7
1234526789
3395823752678
6 652383338187853586 522868368
123452678118
5 637838
12342566278
9
17 7766278
99 8
56 32237838
8
9
32 58658
8
9 8
99 8
9
8
Коэффициент n3 в зависимости от степени точности расчетов может прини
маться в следующих пределах: n3 = 1,00–1,65.
Необходимо отметить, что при учете всех факторов, влияющих на проч
ность детали, следует принимать: n3 = 1,00–1,10, реже (в особо ответственных
случаях) до 1,2.
Большие значения n3 принимаются лишь при приближенных расчетах без
учета всех факторов, влияющих на прочность детали.
Таким образом, общий запас прочности для деталей, изготовленных из ста
ли, может колебаться в следующих пределах:
n = n1n2n3 = (1,08 × 1,05 × 1,0)...(1,30 × 1,50 × 1,65)
или
n = 1,13–3,22.
8.2.2. ВАРИАНТЫ РАСЧЕТА ДЕТАЛЕЙ ПРИСПОСОБЛЕНИЙ
НА ПРОЧНОСТЬ
1. Расчет на прочность детали в виде стержня круглого сечения, нагружен
ного осевой силой, по допускаемым напряжениям растяжения (сжатия) осуще
ствляется по формуле [10]
12
4P
3 [1],
4d2
где s — фактическое напряжение растяжения (сжатия), МПа; Р — расчет
ная осевая сила, Н; d — диаметр опасного сечения (для резьбового стержня —
внутренний диаметр резьбы), мм; [s] — допускаемое напряжение растяжения
(сжатия).
196
Powered by TCPDF (www.tcpdf.org)
Глава 8
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Определение необходимого размера опасного сечения для подобного случая
можно производить по формуле
4P
.
2[3]
d1
Полученное значение округляется в сторону увеличения до целого или бли
жайшего стандартного значения. При наличии шпоночного паза в опасном се
чении детали полученное расчетом значение d следует увеличить на 5–10%.
2. Расчет на прочность валов и осей с целью определения их размеров мож
но производить по формулам
· на изгиб (детали круглого сечения):
d13
Миз
;
0,1[2из ]
· на изгиб (детали кольцевого сечения):
d13
Миз
;
0,1(1 2 k04 )[3из ]
· на кручение:
d13
Мкр
;
0,2[2кр ]
· на изгиб с кручением (детали круглого сечения):
d13
М экв
;
0,1[2из ]
· на изгиб с кручением (детали кольцевого сечения):
d13
Мэкв
,
0,1(1 2 k04 )[3из ]
где Mиз — изгибающий момент, Н×мм; Mкр — крутящий момент, Н×мм; Mэкв —
2 2 М2 ;
эквивалентный элемент, Н×мм, Мэкв 1 Миз
кр [sиз] — допускаемое напря
жение при изгибе, МПа; [tкр] — допускаемое напряжение при кручении, МПа;
k0 — отношение внутреннего диаметра вала (оси) d0 к наружному d, k0 = d0/d.
Необходимо помнить, что оси рассчитываются только на изгиб и срез, так
как они не передают крутящего момента.
Валы и оси можно рассчитывать на жесткость, но диаметр деталей в этом
случае получается бóльшим, чем при расчете на прочность. Расчет на изгибную
жесткость состоит из определения углов наклона и прогибов упругой линии
осей и валов и сравнения их с допускаемыми значениями. Следует отметить и
сложность расчетов деталей на жесткость. Например, расчет валов на жест
кость при кручении производится по формуле
Расчет деталей приспособлений на прочность
Powered by TCPDF (www.tcpdf.org)
197
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ϕ=
180Мкр l
≤ [ϕ],
πGI p
где j — действительный угол закручивания вала, град; [j] — допускаемый угол
закручивания (можно принимать для большинства валов [j] = 15¢ на 1 м дли
ны, для менее ответственных валов [j] принимается до 2°); Mкр — крутящий
момент, Н×мм; l — длина скручиваемой части вала, мм; G — модуль упругости
при сдвиге, МПа (для стали G = 8×104 МПа); Ip — полярный момент инерции
сечения вала, мм4:
· для круглого сечения
1d4
Ip 2
;
32
· для кольцевого сечения
Ip 2
1d 4
(1 3 k04 ).
32
Уточненный расчет валов на прочность, в случае возникновения такой не
обходимости, заключается в определении коэффициентов запаса для опасных
сечений.
При нагружении соединения силами в плоскости (по поверхности) стыка
деталей и в случае установки штифта (цилиндрического гладкого стержня вин
та) без зазора и работы на срез проверочный расчет штифта (винта) может осу
ществляться по формуле
1ср 2
4Р
3 [1ср ],
4d2i
где Р — сила среза, Н; d — диаметр штифта (стержня винта), мм; i — число
стыков (количество штифтов или винтов) в соединении; [tср] — допускаемое
напряжение среза, МПа.
3. Расчет на прочность шпоночных и шлицевых соединений заключается в
сравнении фактически передаваемого крутящего момента с допускаемым мо
ментом из условий прочности шпонок (шлицев).
Расчет на прочность шпоночных соединений производится по формулам:
1) на смятие:
· для призматических шпонок
Mкр £ 0,25Dhl[sсм];
· для сегментных шпонок
Mкр £ 0,5DKшl[sсм];
· на срез (для призматических и сегментных шпонок)
Mкр £ 0,5Dbl[tср],
где Mкр — крутящий момент (рассчитывается по передаваемой мощности и
частоте вращения вала), Н×мм; D — наружный диаметр вала, мм; h — высота
призматической шпонки, мм; Kш — диаметр выступающей из паза части сег
ментной шпонки, мм; l — рабочая длина шпонки, мм; [sсм] — допускаемое на
пряжение смятия, МПа; b — ширина шпонки, мм.
198
Powered by TCPDF (www.tcpdf.org)
Глава 8
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Проверочный расчет на прочность шлицевых соединений может осуществ
ляться по формулам:
1) на смятие:
· прямобочный профиль
Mкр £ 0,5Dzlhy¢[sсм];
· эвольвентный профиль
Mкр £ 0,5mz2hly¢[sсм];
2) на срез (прямобочный и эвольвентный профили):
Mкр £ 0,25zbly¢(D + d)[tср],
где Mкр — крутящий момент, Н×мм; z — число шлицев; h — высота поверхно
сти контакта, мм (для прямобочного профиля h = 0,5(D – d) – 2fш, здесь fш —
фаска зуба и паза шпоночного соединения, обычно фаска принимается равной
0,3–0,5 мм с допуском +0,2...+0,3; для эвольвентных шлицев с центрировани
ем по боковым поверхностям h = m, с центрированием по наружной цилиндри
ческой поверхности h = 0,9m); D — наружный диаметр вала, мм; d — внутрен
ний диаметр отверстия, мм; b — ширина шлица, мм; m — модуль эвольвентного
соединения, мм; y¢ — коэффициент, учитывающий неравномерность распреде
ления нагрузки по шлицам (y¢ принимается равным 0,7–0,8).
При необходимости расчеты на прочность сварных соединений, пружин,
подшипников, клиноременных, зубчатых передач и других специфических сбо
рочных единиц и деталей следует выполнять по рекомендациям литературных
источников [29].
8.3. ПРИМЕРЫ РАСЧЕТА
ОТДЕЛЬНЫХ ДЕТАЛЕЙ ПРИСПОСОБЛЕНИЙ
НА ПРОЧНОСТЬ
ПРИМЕР 8.1. РАСЧЕТ ПАЛЬЦА ИЛИ ОСИ НА СРЕЗ
Расчет на срез (расчет на деформацию сдвига — скалывания). Деформация
сдвига предшествует деформации среза и заключается в перекрещивании пря
мых углов элементарного параллелепипеда (рис. 8.1).
Условие прочности при сдвиге:
t = Q/A £ [t].
Постановка экспериментов на срез
материалов весьма сложна, так как по
лучить деформацию среза в чистом виде
почти невозможно. Поэтому расчеты на
прочность при «срезе» имеют весьма ус
ловный характер. Кроме того, достовер
но не изучен закон распределения каса
тельных напряжений по плоскостям сре
за. Как допущение принимают то, что
Расчет деталей приспособлений на прочность
Powered by TCPDF (www.tcpdf.org)
Рис. 8.1
Расчет деталей приспособлений на срез
199
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
касательные напряжения распределяются равномерно по плоскостям среза.
Поэтому вопрос выбора допускаемого напряжения при сдвиге сложнее, чем
при растяжении или сжатии, так как практически невозможно воспроизвести
чистый сдвиг без изгиба и других дополнительных явлений, отражающихся на
результатах опыта.
Величину допускаемых напряжений при сдвиге устанавливают экспери"
ментально, принимая [t] как часть допускаемого напряжения того же материа"
ла при растяжении: [t] @ 0,8[s]р — для чугуна, [t] @ (0,5–0,6)[s] — для стали.
ПРИМЕР 8.2. ЭЛЕМЕНТЫ РАСЧЕТА НЕНАПРЯЖЕННОГО
ПРИМЕР 8.2. ШПОНОЧНОГО СОЕДИНЕНИЯ
ПРИМЕР 8.2. (ПРИЗМАТИЧЕСКИЕ И СЕГМЕНТНЫЕ ШПОНКИ)
Достоинства шпоночных соединений — простота и надежность конструк"
ции, невысокая стоимость, простота сборки и разборки.
Недостатки: шпоночные пазы ослабляют вал и ступицу насаживаемой на
вал детали. Ослабление вала обусловливается не только уменьшением его сече"
ния, но, главное, весьма высокой концентрацией напряжений изгиба и круче"
ния, вызываемой шпоночным пазом.
Основным видом расчета для призматических и сегментных шпонок явля"
ется проверочный расчет их на смятие и, во вторую очередь, — на срез.
Действительные условия нагружения шпонок гораздо сложнее: помимо
смятия и среза может иметь место изгиб, оказывает действие трение, возни"
кающее в соединении. В целях унификации расчетов шпоночных соединений
их расчет сводят к проверочному расчету на смятие и срез (рис. 8.2).
Рис. 8.2
Расчет на прочность шпоночного соединения:
а — призматическая шпонка; б — сегментная шпонка.
Призматическая шпонка. T — крутящий момент обусловлен касательной
силой Ft, в отличие от изгибающего момента М.
Допущения, принятые при расчете:
1) напряжения смятия на рабочих поверхностях шпонки распределяются
равномерно;
2) шпонка входит в ступицу на глубину K = 0,4;
3) плечо приложения окружной силы равно Y = d/2, где d — диаметр вала.
Условие прочности призматической шпонки на смятие записывают в виде
неравенства
T £ 0,5dlpk × [s]см
200
Powered by TCPDF (www.tcpdf.org)
Глава 8
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
или, заменяя k = 0,4h,
T £ 0,2hld × [s]см.
Условие прочности на срез
T £ 0,5dblp × [t]c
или
5 1T
4 [2]см ;
n 1l 1d
2 1T
3
4 [5]c .
d 1 lp 1 l
2см 3
5см
Сегментная шпонка. Достоинством сегментных шпонок по сравнению с
призматическими являются технологичность соединения, шпонка имеет устой
чивое направление в канавке и более равномерное распределение давлений на
рабочих поверхностях. Однако паз под сегментную шпонку значительно ослаб
ляет сечение вала и является концентратором напряжений. Поэтому имеет ме
сто ограничения
d ³ 50 мм.
Условие прочности на смятие T £ 0,5dlk × [s]cм.
Материал шпонок — прутковая сталь — сталь 60, сталь 50, сталь 45, для
которых sв @ 5–6 МПа.
Для неподвижных соединений допускают:
· при переходных посадках
[s]см = 80–150 МПа;
· при посадках с натягом
[s]см = 110–200 МПа.
В подвижных соединениях допускаемое напряжение [s]см значительно
уменьшают [s]см @ 20–30 МПа.
В зависимости от характера нагрузки и материала ступицы в неподвижных
соединениях [t]с @ 50–80 МПа.
ПРИМЕР 8.3. РАСЧЕТ РЕЗЬБЫ НА СМЯТИЕ
Это, по существу, проверка на удельное давление между сопряженными
витками резьбы болта (винта) и гайки. При этом пренебрегают углом подъема
резьбы a и относят осевую нагрузку к суммарной площади проекций витков на
плоскость, перпендикулярную к оси резьбового соединения.
Суммарная площадь «колец»
A 1 2 /4 3 ( D2 1 D12 ),
где D — наружный диаметр резьбы; D1 — внутренний диаметр резьбы.
Условие прочности резьбы на смятие (а точнее на удельное давление)
2см 3
F 1 Kн
4 [2]см ,
z 1 5 /4 1 ( D2 6 D12 )
Расчет деталей приспособлений на прочность
Powered by TCPDF (www.tcpdf.org)
201
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Kн — коэффициент неравномерности зависит от типа гайки или
F 1 Z 2 3 /4 2 ( D2 4 D12 ) 2 [5]см .
Высота гайки по условию прочности резьбы на смятие
41 F 1 P
H 2 z1 p 2
,
2
3 1 ( D 4 D12 ) 1 [5]см
где Р — шаг резьбы.
Так как при затягивании резьбы опорные поверхности витков изнашива#
ются, то величину [s]см следует принимать заниженной.
Рекомендуемую величину [s]см = [q], где [q] = [s]см, принимают:
· закаленная сталь по бронзе
[q] £ 10 МПа;
· незакаленная сталь по бронзе
[q] » 9 МПа;
· незакаленная сталь по чугуну
[q] » 5 МПа;
· в нажимных винтах прокатных станов
[q] до 18–20 МПа.
Условие прочности резьбы по напряжениям среза:
· для винта
F
12
3 [1];
4 5 D1 5 K 5 H
· для гайки
12
F
3 [1],
45D5K 5H
где K — коэффициент, учитывающий тип резьбы.
Для резьб крепежных K = 0,87.
Для резьб ходовых:
а) прямоугольного профиля K = 0,5;
б) трапецеидального профиля K = 0,65.
Обычно принимают при стальных гайках
[t] @ (0,2–0,3) × sт,
где sт — предел текучести.
ПРИМЕР 8.4. ОСОБЕННОСТИ РАСЧЕТА РЕЗЬБЫ
ПРИМЕР 8.4. ВИНТОВЫХ МЕХАНИЗМОВ
Основным критерием работоспособности ходовых резьб является износостой#
кость. С целью уменьшения износа применяют антифрикционные пары мате#
риалов (сталь — чугун, сталь — бронза и т. д.), вводят на винтовую поверхность
смазку, понижают допускаемые напряжения смятия на винтовых поверхностях.
202
Powered by TCPDF (www.tcpdf.org)
Глава 8
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Для проектного расчета ходовых резьб на износ формулу
1см 2
F
3 [1]см
z 4 5 /4 4 ( D2 6 D12 )
преобразуют следующим образом:
2см 3
F1K
4 [2]см ,
z 1 5 /4 1 ( D 6 D1 ) 1 ( D 7 D1 )
где 1/2D + D1 — средний диаметр резьбы D2; 1/2D – D1 — высота профиля резь
бы h.
Введем коэффициенты:
1) yH — коэффициент высоты гайки, где H = Z × P — высота гайки, yH =
= H/D2:
· yH = 1,2–2,5 — для цельных гаек;
· yH = 2,5–3,5 — для разрезных гаек.
Примечание: большие значения yH принимают для резьб меньшего диа
метра и наоборот;
2) yh = h/P — коэффициент высоты резьбы:
· yh = 0,5 — для трапецеидальных и прямоугольных резьб;
· yh = 0,75 — для упорной резьбы.
Получаем
F
1 [2]см ,
3 4 5 H 4 5 h 4 D22
откуда
F
Dz 1
.
23 H 3 h 4 [q]
Определив величину D2 по ГОСТ на соответствующий вид резьбы, принима
ют значения всех остальных ее элементов.
Примечание: в передаточных механизмов приспособлений и другого вспо
могательного оборудования металлорежущих станков широкое применение
находит резьба прямоугольного профиля.
Так как ГОСТ на резьбу прямоугольного профиля нет, то, применяя ее,
элементы этой резьбы принимают по ГОСТ для резьбы трапецеидального про
филя (ГОСТ 948473).
Ходовые и грузовые винты проверяют на устойчивость, определяя крити
ческую нагрузку, или же винты любой длины проверяют по объединенному
условию прочности и устойчивости по формуле
sсж = F/A1 £ [s]сж × j,
где F — осевое усилие в винтовой паре; А1 — площадь поперечного сечения
винта по диаметру D1, A1 1 2 3 D12 /4; j — коэффициент понижения допускае
мого напряжения в зависимости от гибкости стержня l = m × l/i; m × l — приве
денная длина стержня; m — коэффициент приведения длины, который зависит
от способа установки и крепления винта; l — длина винта; i — число заходов
резьбы.
Расчет деталей приспособлений на прочность
Powered by TCPDF (www.tcpdf.org)
203
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Для винта, работающего в горизонтальной плоскости, m = 1, а для винта,
работающего в вертикальной плоскости, m = 2.
Значения коэффициента j приведены в таблице 8.3.
1 2 3 4 5 6 2 7 89 7
1234526789
23
6 65238 2652678 935 823752678
8366 68 869 685278
1l
8
i
12
32
485255823452658
312
19
2
412
512
612
19 72
19 32
19
712
2
19 52
812
19
2
2
ПРИМЕР 8.5. РАСЧЕТ НА ПРОЧНОСТЬ
ПРИМЕР 8.5. ЦИЛИНДРИЧЕСКИХ ВИНТОВЫХ ПРУЖИН
ПРИМЕР 8.5. СЖАТИЯ (РАСТЯЖЕНИЯ)
Параметры, характеризующие пружину (рис. 8.3):
· d — диаметр проволоки;
· D — средний диаметр пружины;
· C = D/d — индекс пружины (табл. 8.4 и 8.5);
4C + 2,5
· Kв — поправочный коэффициент, Kв =
;
4C − 2,5
· t — шаг витков или шаг пружины;
· n0 — полное число витков;
· n — число рабочих витков.
Рис. 8.3
Схема нагружения пружины:
P — нагрузка на пружину; T = P ⋅
D
— крутящий момент в любом сечении витка пружины.
2
1 2 3 4 5 6 2 7 89 7
1 2 3 4 5 6 2 7 89 7
1234526789 9 3 42
8 6652381
83 66 68 8625389 628
288348
118
204
Powered by TCPDF (www.tcpdf.org)
12
32
42
52
62
72
89 52 89 72 89 12 89852 89812 89882
8
1234526782592 44 64 26
5278 265 1 2
13
123456
7256
82136
23
52136
92136
92 6
Глава 8
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Пружины сжатия навивают таким образом, чтобы между витками остава
лись зазоры S0. Величину этого зазора устанавливают с таким расчетом, чтобы
при напряжениях в витках пружины, равным допускаемому, между витками
оставался гарантированный зазор Sp @ 0,1d.
При этом рабочая нагрузка Pmax = P2 не должна превышать 80–90% от пре
дельной нагрузки Pпр = P3, при которой витки соприкасаются.
Шаг t пружины в свободном состоянии
t = d + l/n + Sp,
где l — осадка пружины под нагрузкой Pmax = P2.
Принимают t @ D/3, реже t £ D/2 или
t = d + (1,1–1,2) × lmax/n0.
Торцевые витки пружины должны прижиматься к соседним виткам. После
закалки пружины торцевые поверхности ее шлифуют для обеспечения перпен
дикулярности торцов к оси пружины. Это необходимо для предотвращения
перекоса пружины под нагрузкой. Торцевые витки, частично сошлифованные,
не принимают участия в работе пружины; следовательно, полное число витков
n0 пружины больше числа n рабочих витков.
Принимают
n0 = n + (1,5–2,0).
Число n рабочих витков определяют из формулы
l = BPD3 × n/G × d4,
откуда
n = Gd4 × l/B × PD3.
Для расчета по этой формуле должна быть известна (задана) осадка пружи
ны l:
· lmin — предварительная деформация (осадка) пружины;
· lmax — рабочая деформация пружины;
· lпр — предельная величина деформации пружины;
· H0 — полная длина (высота) пружины в свободном состоянии (поджатие
0,75 витка с каждой стороны);
· Hпр = Hз — длина (высота) пружины при полном сжатии (при посадке вит
ка на виток).
Hпр = (n0 – 0,5)d;
H0 = Hпр + n(t – d) = (n0 – 0,5)d + n(t – d).
Для обеспечения устойчивости пружины необходимо соблюдать условия
H0/D £ 2,6.
При H0 ³ 2,6D пружина устанавливается в гильзе или на оправке.
Опытным путем установлены зависимости:
P1 = Pmin = Pпр/3 при d < 5 мм;
P1 = Pmin = Pпр/4 при d ³ 5 мм.
Расчет деталей приспособлений на прочность
Powered by TCPDF (www.tcpdf.org)
205
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
При рабочей нагрузке Pр = Pmax напряжение в опасной точке пружины долж
но быть примерно равно допускаемому. Может быть допущена некоторая пере
грузка пружины до Pпр, при этом
Pпр = Pр/(1 – d),
где d = 0,05–0,1, или
Pпр = (1,1–1,2)Pпр.
Расчет на прочность цилиндрических винтовых пружин сжатия (растяже
ния) выполняют (табл. 8.6 и 8.7) по касательным напряжениям (напряжениям
кручения).
Наибольшее напряжение кручения в сечении витка винтовой пружины
tmax = T × Kв/Wp,
3
3
где W = p × d /16 » 0,2d — полярный момент сопротивления сечения витков
пружины.
Получаем условие прочности материала пружины
P 1 D /2
81P1D
2max 3
1 Kв 3 Kв 1
4 [2]к .
5 /16 1 d3
5 1 d3
Отсюда, учитывая, что D = C × d, находим диаметр проволоки пружины
d1
Kв 8PD
Kв PC
.
2 1,6 3
[5]к
4 3 [5]к
Осевая деформация пружин сжатия (растяжения)
l = 8D3p × n/G × d4,
4
где G = 8×10 МПа — модуль сдвига.
Формула для осевой деформации пружины может быть представлена и в
другом виде
1 2 n 2 D2 2 [3]к
45
.
Kв 2 d 2 G
Материалом для пружин является высокоуглеродистая и легированная
сталь, реже — бронза (при работе в магнитном поле). Характер нагрузки пру
жин — статическая или плавноизменяющаяся.
1234562789 7 9 5 6969 12569
32769
12
32
199
5# $%2
5# $%2
19129
5# 22
5# 22
456728982
4567 7 2
12 2
&# 2
1234526789
35823 75268238 452658
Powered by TCPDF (www.tcpdf.org)
1 2 3 4 5 6 2 7 89 7
5 282882 2 282!82
28282
!"2
12 2
122
&# 2
# 2
1 2 3 4 5 6 2 7 89 7
355823 752678238 45265811838
35638 628
6358 68188
8
8
1234353678198
8
12343536788
8
7588588 8
8
8
8
206
248492 5 46 9
!8
"8
"!8
#8
!8
$8
%8
&8
8'89 8"$8
8 8
8 8
8 8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
Глава 8
.
ГЛАВА
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ПРИСПОСОБЛЕНИЯ
ДЛЯ КОНТРОЛЯ
ТОЧНОСТИ ДЕТАЛЕЙ
Контрольные приспособления — это устройства или комплекс
устройств вспомогательного назначения, необходимые для выполнения вспо
могательных технологических переходов измерения или контрольных опера
ций технологического процесса. К ним относятся универсальноизмеритель
ные приборы — линейки, штангенциркули, микрометры и т. п., для контроля
одного или нескольких параметров детали — скобы, калибры, а также специ
альные контрольноизмерительные приспособления (КИП), сочетающие в себе
базирующие, зажимные, передающие и измерительные устройства.
9.1. ОСНОВНЫЕ ПОНЯТИЯ
О МЕТРОЛОГИЧЕСКОМ ОБЕСПЕЧЕНИИ
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
Метрология — наука об измерениях, методах и средствах обес
печения их единства и способах достижения требуемой точности.
Измерение — нахождение значения физической величины опытным путем
с помощью специальных технических средств.
Средство измерений — техническое средство, используемое при измерени
ях и имеющее нормированные метрологические свойства.
Прямое измерение — измерение, при котором искомое значение величины
находится непосредственно из опытных данных.
Косвенное измерение — измерение, при котором искомое значение величи
ны находится на основании известной зависимости между этой величиной и
величинами, определяемыми прямыми измерениями.
Метод измерений — совокупность приемов использования средств изме
рений.
Основными методами прямых измерений являются: метод непосредствен
ной оценки (абсолютный метод), при котором значение величины определяет
ся непосредственно по шкале прибора, и метод сравнения, при котором изме
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
207
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ряемую величину сравнивают с некоторой настроенной величиной (относитель
ный метод).
Измерительный прибор — средство измерений, предназначенное для вы
работки численного показания или сигнала измерительной информации в фор
ме, доступной для непосредственного восприятия наблюдателем.
Калибр — средство контроля, предназначенное для проверки годности раз
мера детали (например, калибр предельный) или ее конфигурации. Аналогич
ный термин — шаблон.
Погрешность измерения — отклонение результата измерения от истинно
го значения измеряемой величины.
Суммарная погрешность измерения D — погрешность, включающая по
грешность инструмента, погрешность метода измерений и ряд дополнитель
ных погрешностей.
КЛАССИФИКАЦИЯ СРЕДСТВ КОНТРОЛЯ
Классификация средств контроля (СК) производится по следующим пара
метрам [1], [4], [15], [16], [18], [25], [26], [29], [35].
По типу контролируемых величин:
· геометрических;
· механических;
· параметров потока, расхода, уровня, объема вещества;
· давления и вакуума;
· времени и частоты;
· физикохимического состава и свойства вещества;
· теплофизических и температурных величин;
· электрических и магнитных величин;
· радиоэлектрических величин;
· акустических величин;
· оптических и оптикофизических величин;
· ионизирующих излучений и ядерных констант.
По типу контролируемых геометрических величин:
· линейных размеров (калибры, СК длин и диаметров);
· сложных деталей (зубчатых колес, шпоночных и шлицевых соединений,
резьб);
· углов и конусов;
· формы и расположения поверхности;
· шероховатости;
· толщины покрытия.
По способу измерения различают СК абсолютные и относительные, кото
рые подразделяются на прямые и косвенные, контактные и бесконтактные;
статические, кинематические и динамические.
По месту расположения СК бывают наружными, встроенными и комбини
рованными.
По сложности и составу элементов конструкций СК подразделяются на
инструменты, приспособления, приборы и оборудование.
По степени механизации и автоматизации СК бывают ручные, механи
зированные, полуавтоматические и автоматические.
208
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Выбор СК основывается на обеспечении заданных показателей процесса
технического контроля (ТК) при условии минимальных затрат на его реализа!
цию (ISО 609!39!88). К обязательным показателям процесса контроля относят
точность измерений, достоверность, трудоемкость и стоимость контроля. Приме!
нение специальных СК целесообразно при отсутствии стандартизованных и
универсальных СК и в случаях, если это оправдано экономически за счет пре!
имуществ в точности, производительности и надежности.
Процесс выбора СК включает следующие основные этапы:
· подготовка исходных данных контроля (выбор контролируемых парамет!
ров, их номинальное значение, квалитет);
· выбор СК по виду контролируемого параметра, по диапазону, способу и
точности;
· выбор СК по конфигурации детали (габаритам, массе, возможным деформа!
циям);
· выбор СК по числу контрольных точек, количество которых определяют из
условия обеспечения контроля каждого параметра.
Применение универсальных измерительных инструментов и калибров не
всегда обеспечивают требуемую точность, удобство и производительность конт!
роля.
Контрольно!измерительные приспособления отчасти лишены указанных
недостатков. Они используются для измерения параметров заготовки после ее
обработки на отдельных операциях (межоперационный контроль), сборочных
единиц и деталей (окончательный контроль).
КИП подразделяются на универсальные и специальные, одномерные и мно!
гомерные, ручные и автоматизированные; стационарные, переносные и встро!
енные; пассивные и активные; с бесшкальными и шкальными измерительны!
ми элементами.
Универсальные приспособления обычно компонуются из контрольных плит,
установочных элементов (концевых мер, призм, опорных пластин и т. д.), из!
мерительных средств (индикаторов, уровней, динамометров и т. д.), стоек для
их установки. Специальные приспособления проектируются для измерения
определенных параметров в условиях крупносерийного и серийного произ!
водств. Чаще всего они бывают многомерными — для комплексной проверки
деталей.
Автоматизированные приспособления используются в серийном и крупно!
серийном производствах часто в качестве встроенных устройств.
Пассивные приспособления используются для готовых деталей и сбороч!
ных единиц. Активные приспособления контролируют заготовки в процессе
изготовления или сборочные единицы в процессе сборки.
В настоящее время наблюдается тенденция использования универсальных
многомерных приспособлений, где за один установ проверяют несколько пара!
метров. Еще больше повышает производительность и облегчает условия труда
применение контрольных полуавтоматов, которые часто являются звеньями
автоматических линий обработки и сборки.
Для проверки небольших и средних деталей применяют стационарные кон!
трольные приспособления, для крупных — переносные, устанавливаемые на
проверяемую деталь (узел).
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
209
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
9.2. ОСНОВНЫЕ МЕТОДЫ И СХЕМЫ КОНТРОЛЯ
ОТКЛОНЕНИЙ ФОРМЫ
И РАСПОЛОЖЕНИЯ ПОВЕРХНОСТЕЙ
На этом этапе проектирования определяют перечень геометри
ческих параметров заготовки, детали или сборочной единицы, для которых
будут разрабатываться вспомогательные технологические переходы или опе
рации контроля. Для каждого контролируемого параметра со ссылками на спра
вочные и методические материалы определяется метод и схема контроля или
несколько альтернативных вариантов. Основным требованием при выборе схем
контроля является возможность реализации комплексной проверки несколь
ких параметров при использовании одного КИП. На выбор принципиальной
схемы контрольного приспособления большое влияние оказывает заданная про
изводительность контроля.
9.2.1. ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ПРЯМОЛИНЕЙНОСТИ
ОБЩИЕ ПОЛОЖЕНИЯ
Отклонение от прямолинейности в плоскости — наибольшее расстояние D
от точек реального профиля до прилегающей прямой в пределах нормируемого
участка. В зависимости от количества измеренных точек методы измерения
прямолинейности подразделяются на непрерывные и дискретные. Дискретные
методы измерения с постоянным шагом t между измеряемыми точками назы
ваются шаговыми. Шаг t рекомендуется принимать равным 0,1L (L — длина
измеряемого участка), но не более величин, приведенных в таблице 9.1.
Для измерений без применения электрических фильтров рекомендуется
применять сферические измерительные наконечники с радиусом не менее
25 мм. При измерении шаговым методом могут применяться и плоские (жест
кие или качающиеся) наконечники с круговой опорной площадкой диаметром
не более 0,1t.
Оценка отклонений от прямолинейности по результатам измерения осуще
ствляется одним из следующих способов:
1) непосредственно по показаниям отсчетного устройства. Предварительно
деталь выверяется так, чтобы показания на концах измеряемого участка были
одинаковыми. За отклонение от прямолинейности принимается алгебраиче
ская разность между наибольшим и наименьшим показаниями;
1 2 3 4 5 6 2 7 89 7
1234567899 2
539 9 523 39 93 1
3 39 933 5 6593 5 56395 3
5 5639
5 3 632 39 955 2
5 !
!"#!!
#!!"$%!
$%!"&'!
&'!"#!!!
2 2 #!!!"$%!!
$%!!" !!!
!!!"#! !!!
123453
643
673
683
693
6 53
6 43
6 73
6 83
45
643
643
673
683
693
6 53
6 43
6 73
643
643
643
673
683
693
6 53
6 43
53
3 53
525333322322 !37553""3
210
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
2) по профилограмме измеренного профиля. Отклонение от прямолинейно
сти определяется как наибольшее в направлении оси ординат отклонение от
прилегающей прямой до наинизшей точки профилограммы;
3) с помощью ПК, в котором результаты измерения пересчитываются на
отклонения относительно средней или прилегающей прямой (рис. 9.1).
Рис. 9.1
Прилегающая прямая для:
а — вогнутой формы поверхности; б — выпуклой формы поверхности.
ИЗМЕРЕНИЕ ПРИБОРОМ
С ПРЕЦИЗИОННЫМ ПРЯМОЛИНЕЙНЫМ ПЕРЕМЕЩЕНИЕМ
Прибор (прямомер) позволяет сравнить профиль детали с траекторией точ
ного прямолинейного перемещения (рис. 9.2). Измеряемый профиль ориенти
руют по направлению перемещения предметного стола или измерительного
преобразователя. Измеренные отклонения профиля регистрируются записы
вающим устройством или вводятся в ПК.
Рис. 9.2
Схема прибора с прецизионным прямо
линейным перемещением:
1 — контролируемая деталь; 2 — прецизион
ная направляющая прямолинейного переме
щения; 3 — измерительный преобразователь;
4 — самописец; 5 — стол прибора.
ИЗМЕРЕНИЕ НА КООРДИНАТНОИЗМЕРИТЕЛЬНОЙ МАШИНЕ
Измеряемая деталь устанавливается на столе координатноизмерительной
машины (КИМ) (рис. 9.3), и измеряются координаты отдельных точек профи
ля. Измеренные значения вводятся в ПК для математической обработки.
Рис. 9.3
Схема координатноизмерительной машины:
1 — контролируемая деталь; 2 — КИМ.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
211
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ ПОВЕРОЧНОЙ ЛИНЕЙКИ
И ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ ИЛИ КОНЦЕВЫХ МЕР ДЛИНЫ
Поверочную линейку устанавливают на двух опорах в точках наименьшего
прогиба (рис. 9.4). Измерительной головкой в стойке (или концевыми мерами
длины) измеряют расстояния между профилем детали и линейкой в отдельных
точках и строят профилограмму.
Рис. 9.4
Схема измерения с применением
поверочной линейки и измерительной
головки или концевых мер длины:
1 — контролируемая деталь; 2 — поверочная
линейка; 3 — специальная стойка или карет<
ка; 4 — измерительная головка; 5 — непод<
вижная опора; 6 — регулируемая опора.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ ПОВЕРОЧНОЙ ПЛИТЫ
И ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ
Измеряемая деталь устанавливается на опорах (рис. 9.5) Измерительная
головка на стойке перемещается по поверочной плите вдоль профиля детали
(дополнительно может быть применена направляющая линейка). По показа<
ниям головки в отдельных точках профиля строится профилограмма.
Рис. 9.5
Схема измерения с применением
поверочной плиты и измерительной
головки:
1 — контролируемая деталь; 2 — поверочная
плита; 3 — измерительная стойка; 4 — из<
мерительная головка; 5, 6 — опоры.
212
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ КОМПАРАТОРА,
ИМЕЮЩЕГО НЕСКОЛЬКО ИЗМЕРИТЕЛЬНЫХ ГОЛОВОК
В простейшем случае компаратор имеет две неподвижные опоры и несколь/
ко измерительных головок, расположенных с шагом t. Установка головок на
нуль производится, используя меру прямолинейности. По показаниям головок
после установки компаратора на измеряемую деталь строится профилограмма
(в опорных точках отклонения принимаются равными нулю). Компаратор с
регулируемыми опорами и уровнем (рис. 9.6) применяют при измерении уча/
стков, превышающих длину компаратора. Компаратор последовательно уста/
навливают на нескольких участках измеряемого профиля, так чтобы каждый
последующий участок включал хотя бы одну измеренную точку предыдущего.
Настройка компаратора и снятие отсчетов с измерительных головок и шкал
регулируемых опор производятся при нулевом показании уровня.
Рис. 9.6
Схема измерения с применением
компаратора, имеющего несколько
измерительных головок:
1 — контролируемая деталь; 2 — корпус ком/
паратора; 3 — измерительная стойка; 4 — из/
мерительная головка; 5 — уровень.
ИЗМЕРЕНИЕ ДВУХОПОРНЫМ МОСТИКОМ
И ИЗМЕРИТЕЛЬНОЙ ГОЛОВКОЙ
Измерительная головка, закрепленная в мостике, устанавливается на нуль,
используя меру прямолинейности. Мостик последовательно перемещается по
измеряемой поверхности с шагом t (рис. 9.7). По показаниям измерительной
головки воспроизводятся отклонения измеренных точек профиля и строится
профилограмма.
Рис. 9.7
Схема измерения двухопорным мости/
ком и измерительной головкой:
1 — контролируемая деталь; 2 — двухопор/
ный мостик; 3 — измерительный наконеч/
ник; 4 — измерительная головка.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
213
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЕ ЛЕКАЛЬНОЙ ЛИНЕЙКОЙ
Лекальная линейка своим рабочим ребром (рис. 9.8) прикладывается к из%
меряемому профилю нормально к поверхности. Оценивается наибольшая ши%
рина просвета между линейкой и деталью. Способ не дает возможности провес%
ти количественный анализ формы профиля.
Рис. 9.8
Схема измерения лекальной линейкой:
1 — контролируемая деталь; 2 — лекальная
линейка.
9.2.2. ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ
ОБЩИЕ ПОЛОЖЕНИЯ
Отклонение от плоскостности — наибольшее расстояние D от точек реаль%
ной поверхности до прилегающей плоскости в пределах нормируемого участка.
Существующие методы измерения отклонений от плоскостности в основ%
ном являются дискретными: поверхность измеряется в отдельных точках. Чем
больше число измеряемых точек, тем полнее результат измерения соответству%
ет стандартному определению отклонения от плоскостности.
Для прямоугольных поверхностей точки измерения располагают на про%
дольных, поперечных и диагональных сечениях. Если измерения производят
относительно плоской базы, то достаточно измерять точки на продольных и
поперечных сечениях.
Максимальные расстояния между точками измерения (шаги t) приведены
в таблице 9.2. Обычно принимают t1 » t2.
Измерительные приборы и измерительные мостики, применяемые при из%
мерении отклонений от плоскостности, рекомендуется снабжать качающимися
1 2 3 4 5 6 2 7 89 7
1234567899 2
539 9 523 39 93
3 39 933 5 6593 5 65 5 5 3
5 5639
5 3 632 39 955 2
2 1 5 !"
!"#$
#$ !"
!"
123453
643
7 6893
6 3
7 6 93
6 3
7 6 93
63
7 693
653
7 693
643
7 6893
6 3
7 6 93
6 3
7 6 93
45 53
643
7 6893
643
7 6893
6 3
7 6 93
6 3
7 6 93
63
7 693
653
7 693
643
7 6893
6 3
7 6 93
3 53
643
7 6893
643
7 6893
643
7 6893
6 3
7 6 93
6 3
7 6 93
63
7 693
653
7 693
643
7 6893
5253323 3 ! "#$3"%&33'3(!#$32)*3!"(23'2!3
"&% "#3 3(" "#3*2(+ 23',3!' &3
214
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
плоскими наконечниками с круглой опорной поверхностью диаметром не бо
лее 0,1t.
Оценка отклонений от плоскостности производится на основе математиче
ской модели измеренной поверхности — значений расстояний измеренных то
чек от плоскости, принятой за базу при измерении, с учетом координат этих
точек в базовой плоскости.
Обработка результатов измерения по математической модели может осуще
ствляться:
· графическими методами построения прилегающей плоскости;
· расчетными методами, главным образом с помощью ПК. В качестве базы
для оценки отклонения от плоскостности может быть принята прилегаю
щая плоскость;
· непосредственно по показаниям отсчетного устройства как разность между
наибольшим и наименьшим показаниями;
· с помощью механической аналоговой модели.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
МЕТОДОВ КОНТРОЛЯ ОТКЛОНЕНИЙ
ОТ ПРЯМОЛИНЕЙНОСТИ
Одним из шаговых методов, описанных
ранее, измеряются отклонения от прямо
линейности в продольных, поперечных и
диагональных сечениях (рис. 9.9). Для по
лучения математической модели результа
ты измерения в отдельных сечениях долж
ны быть приведены к общей плоскости,
обычно к одной из баз. Отклонение от пло
скостности определяется либо непосредст
венно по математической модели как раз
ность наибольшей и наименьшей высот из
меренных точек, либо путем дальнейших
расчетов с помощью ПК от прилегающей
плоскости.
Рис. 9.9
Расположение точек измерения
на плоскости:
t1, t2 — шаг между точками измерения на
продольных и поперечных линиях соответ
ственно.
ИЗМЕРЕНИЕ ДВУХОПОРНЫМ
ИЗМЕРИТЕЛЬНЫМ МОСТИКОМ
И УРОВНЕМ
Деталь выверяется приблизительно го
ризонтально (рис. 9.10). Двухопорный из
мерительный мостик с установленным на
нем уровнем (или уровень с опорами в виде
измерительного мостика) перемещается ша
гами t1 и t2 по взаимно параллельным про
дольным и поперечным сечениям. По ре
зультатам измерений наклонов соседних
участков находят относительные высоты
их концов и математическую модель изме
ренной поверхности относительно плоско
сти, перпендикулярной направлению силы
тяжести земли.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
Рис. 9.10
Схема измерения двухопорным
измерительным мостиком
и уровнем:
1 — контролируемая деталь с располо
жением точек измерения; 2 — измери
тельный мостик; 3 — уровень.
215
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЯ
НА ТРЕХКООРДИНАТНОЙ ИЗМЕРИТЕЛЬНОЙ МАШИНЕ
Деталь устанавливают на стол КИМ (рис. 9.11). Измеряют координаты Ai
отдельных точек поверхности, по которым с помощью компьютера рассчиты0
вается отклонение от плоскостности.
Рис. 9.11
Схема измерений на трехкоординат0
ной измерительной машине:
1 — контролируемая деталь с расположе0
нием точек измерения; 2 — трехкоорди0
натная измерительная машина.
ИЗМЕРЕНИЕ С ПОМОЩЬЮ ПОВЕРОЧНОЙ ЛИНЕЙКИ
И ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ
Схема измерения показана на рисун0
ке 9.12. Данный метод позволяет опреде0
лить математическую модель поверхности
относительно плоскости, проходящей па0
раллельно через три угловые точки поверх0
ности, которые определяют базу при изме0
рении. Линейка опирается на регулируемые
опоры. Измерения выполняются измери0
тельной головкой. В начале, установив по0
верочную линейку по диагонали, находят
Рис. 9.12
отклонение точки в середине диагонали.
Схема измерения с помощью
Затем устанавливают линейку по второй
поверочной линейки и измери0
тельной головки:
диагонали, опирая ее на третью базовую
1 — контролируемая деталь; 2 — пове0
точку, и определяют отклонение во второй
рочная линейка; 3 — измерительная го0
крайней точке. По известным положениям
ловка; 4 — регулируемые опоры.
четырех угловых точек путем установки по0
верочной линейки в продольных и поперечных направлениях определяют от0
клонения остальных точек и получают математическую модель поверхности.
Возможно также измерение относительно плоскости, параллельной лини0
ям, соединяющим крайние точки диагональных сечений. Для этого повероч0
ная линейка устанавливается с помощью опор по обоим диагональным сечени0
ям так, чтобы в центре показание головки было бы равно нулю, а в крайних
точках каждой диагонали показания были бы попарно одинаковы. Эти показа0
ния в пяти точках являются значениями математической модели, к которым
привязываются значения, измеряемые в продольных и поперечных сечениях.
216
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЕ С ПОМОЩЬЮ ЛИНЕЙКИ"КОМПАРАТОРА
Линейка (рис. 9.13) имеет две регулируемые опоры с микрометрическими
головками (одна для установки высоты начальной точки, другая для выверки
линейки в горизонтальное положение) и встроенные с шагом t измерительные
головки. Устанавливая линейку на плоский или прямолинейный образец, при"
водят показания микрометрических голо"
вок опор и измерительных головок к нулю.
Затем установкой линейки на измеряемую
поверхность производят измерения по сет"
ке продольных и поперечных сечений. При
этом левая микрометрическая головка уста"
навливается в соответствии со значением
математической модели в данной точке (в ис"
ходной точке оно равно нулю), правая опора
регулируется так, чтобы показание уровня
было равно нулю. Отсчеты по измеритель"
ным головкам и микрометрическим голов"
Рис. 9.13
кам опор являются значениями математи"
Схема измерения с помощью
линейки"компаратора:
ческой модели поверхности относительно
1 — контролируемая деталь; 2 — осно"
горизонтальной плоскости, проведенной че"
вание линейки; 3 — измерительная го"
рез начальную угловую точку измеряемой
ловка; 4 — микрометрическая головка;
5 — уровень.
поверхности.
ИЗМЕРЕНИЕ РАМОЙ ИЛИ ПЛИТОЙ
С ИЗМЕРИТЕЛЬНЫМИ ГОЛОВКАМИ
В раме или плите закрепляются изме"
рительные головки в соответствии с планом
расположения точек измерения (рис. 9.14).
Измерительные головки устанавливают на
нуль по образцу плоскостности (например,
поверочной плите). При установке рамы на
измеряемую поверхность по измеритель"
ным головкам отсчитывают значения ее
математической модели. Базовой моделью
является плоскость, проходящая через три
неподвижные опоры рамы.
Рис. 9.14
Схема измерения рамой или плитой
с измерительными головками:
1 — контролируемая деталь; 2 — рама или
плита с тремя неподвижными опорами;
3 — измерительная головка; 4 — регули"
руемая опора.
ИЗМЕРЕНИЕ УСТРОЙСТВОМ
С АЭРОСТАТИЧЕСКОЙ ОПОРОЙ
И ИЗМЕРИТЕЛЬНЫМИ ГОЛОВКАМИ
Корпус устройства (рис. 9.15) имеет ка"
меру и выходные отверстия, благодаря ко"
торым воздух под давлением создает аэро"
статическую опору. Вследствие усредняю"
щего действия воздушной подушки средняя
плоскость поверхности устройства устанав"
ливается параллельно средней плоскости
измеряемой поверхности. Измерительные
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
Рис. 9.15
Схема измерения устройством
с аэростатической опорой и измери"
тельными головками:
1 — контролируемая деталь; 2 — устрой"
ство с аэростатическими опорами; 3 — из"
мерительные головки; 4 — образцовая по"
верхность прибора.
217
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
головки закрепляются в корпусе компаратора в соответствии с планом точек
измерения и настраиваются на нуль по образцу плоскостности или по специ
альной методике непосредственно на измеряемой поверхности.
Показания измерительных головок при установке на измеряемую поверх
ность являются ее математической моделью, а разность между наибольшим и
наименьшим показаниями определяет отклонение от плоскостности относи
тельно средней плоскости.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ ПОВЕРОЧНОЙ ПЛИТЫ
И ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ
Рис. 9.16
Схема измерения с применением
поверочной плиты и измерительной
головки:
1 — контролируемая деталь; 2 — повероч
ная плита; 3 — измерительная головка.
Деталь измеряемой поверхностью ус
танавливается на поверочной плите (рис.
9.16) и при перемещении относительно
ее ощупывается в различных точках из
мерительной головкой. Наибольшее пока
зание головки, предварительно настроен
ной на нуль по плоскому образцу, равно
отклонению от плоскостности относитель
но плоскости, проведенной через три вы
ступающие точки поверхности. Метод не
применим при выпуклой или седлообраз
ной форме поверхности.
ИЗМЕРЕНИЕ ИНТЕРФЕРЕНЦИОННЫМ МЕТОДОМ
На измеряемую поверхность, которая имеет хорошую отражательную спо
собность, накладывается под малым углом плоскопараллельная стеклянная
пластина. За счет воздушного клина создается интерференциональная карти
на. По форме и искривлению интерференционных полос судят о форме поверх
ности и отклонении от плоскостности.
КОНТРОЛЬ ПОВЕРОЧНОЙ ПЛИТОЙ НА КРАСКУ
На поверочную плиту наносят тонкий слой краски, кладут плиту на конт
ролируемую поверхность (детали малых размеров кладут на плиту) и их отно
сительным перемещением растирают краску по поверхности. По величине ок
рашенной поверхности и распределению пятен контакта на поверхности судят
о ее плоскостности. Метод дает только качественную оценку формы.
9.2.3. ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ КРУГЛОСТИ
ОБЩИЕ ПОЛОЖЕНИЯ
Отклонение от круглости — наибольшее расстояние от точек реального про
филя до прилегающей окружности.
Если плоскости измерения отклонений от круглости не даны, то их количе
ство и расположение определяется в соответствии с таблицей 9.3.
Количество плоскостей измерения может быть изменено по сравнению с
указанным в таблице 9.3 при условии, если этого достаточно для выявления
наибольшего отклонения от круглости. За отклонение от круглости для поверх
ности принимается наибольшая из величин, измеренных в разных сечениях.
218
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
1234526782542934
69 522549
67 2 349
4264 919559
2 49 4 34 29 5226 943 4626 94938 4 9
446426 297 69
97 529129
5225494264 9
123893
4
2 49
4 34 29
5226 939
12343
43
4563
73
363
8957993
63
12343
73
4563
63
363
37993
3
12343
63
4563
3
363
83
5 253233223 3 3 3!"3#3 $
2323 323 2%3223 3&3!73
1 2 3 4 5 6 2 7 89 7
1234567859 8 6 5 2654 6 4 2965476
56858 644 8 6465 46
!4
2 6 856
8584 6
47859 461 66
848 8486588 48646483 6
5 643126
5678 864 65 4 66
46" #6
" #$#6
#$%&6
72'86%&6
123453
4653
653
653
653
457653
6553
4653
4653
653
6574853
46553
6553
6553
4653
48578653
46553
46553
6553
6553
86579553
46553
46553
46553
46553
При измерении отклонений от круглости, включая волнистость, на прибо
рах, имеющих электрические частотные фильтры, верхнюю границу пропус
кания фильтра рекомендуется выбирать в соответствии с таблицей 9.4, но не
менее 50 колебаний, вызванных неровностями профиля, за оборот. Если тех
ническими требованиями предписывается измерение отклонения от круглости
без учета волнистости, то для всех диаметров деталей следует пользоваться
фильтром их частот с предельным числом колебаний 15 об–1. Для измерений
только волнистости следует пользоваться полосовым фильтром с нижней гра
ницей пропускания 15 об–1 и верхней границей в соответствие с таблицей 9.4.
Оценка отклонений от круглости по результатам измерений производится
одним из следующих способов:
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
219
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1) непосредственно по показаниям отсчетного устройства определяется ал
гебраическая разность между наибольшим и наименьшим показаниями, кото
рая в некоторых методах измерения пересчитывается с учетом поправочного
коэффициента; этот способ предполагает предварительное исключение влия
ния эксцентриситета проверяемого сечения;
2) ручной обработкой профилограммы сечения, записанной преимущест
венно в полярных координатах; для нахождения базовой окружности, от кото
рой отсчитывают отклонение от круглости, применяют прозрачный шаблон с
концентричными окружностями или циркуль; в качестве базы применяют в
основном прилегающую окружность (наименьшую, описанную для вала или
наибольшую, вписанную для отверстия) или среднюю окружность, если про
филограмма записывается относительно нее;
3) с помощью ПМ, пересчитывающих измеренные значения на отклонения
от круглости относительно средней или прилегающей окружности.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ ПРЕЦИЗИОННОГО ВРАЩЕНИЯ
Схема измерения приведена на рисунке 9.17. При измерении реальный про
филь сравнивается с траекторией точного вращения шпинделя прибора (круг
ломера). Различают кругломеры с вращающимся измерительным преобразо
вателем при неподвижном столе и детали и с вращающимся предметным сто
лом при неподвижном преобразователе. Перед измерением деталь центрируют
и нивелируют относительно оси шпинделя прибора. Измеряется изменение ра
диусов профиля относительно оси вращения за один оборот. Измеренный про
филь регистрируется на полярной диаграмме. Возможно применение ПК для
автоматического определения базовой окружности (средней или прилегающей)
и отклонения от круглости. Данный метод измерения является наиболее точ
ным и позволяет измерять отклонение от круглости в соответствии с его стан
дартным определением.
Рис. 9.17
Схема измерения с применением
прецизионного вращения:
1 — контролируемая деталь; 2 — точный
шпиндель; 3 — измерительный преобразо
ватель.
220
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
ОБРАЗЦА КРУГЛОСТИ
Схема измерения показана на рисун(
ке 9.18. Измеряемая деталь сопрягается
с образцовой по форме деталью (кольцом
или пробкой), которая в ограниченном
диапазоне диаметров материализует при(
легающую окружность. Измерительной
головкой, закрепленной неподвижно на
образцовой детали, регистрируется мак(
симальная разность показаний за один
оборот измеряемой детали относительно
образцовой. Для более полной компенса(
ции действительных отклонений диамет(
ра деталей применяют образцовые дета(
ли, регулируемые по диаметру, либо на(
бор различных по диаметру образцовых
деталей.
ИЗМЕРЕНИЕ
С ПРИМЕНЕНИЕМ АЭРОСТАТИЧЕСКИ
ЦЕНТРИРОВАННОГО
ОПОРНОГО ЭЛЕМЕНТА
Рис. 9.18
Схема измерения с применением
образца круглости:
1 — контролируемая деталь; 2 — образец
круглости (калибр(кольцо); 3 — измери(
тельная головка.
Схема может быть применена для изме(
рения внутренних и наружных поверхно(
стей вращения. Опорный элемент в виде
пробки или кольца базируется на аэроста(
тических опорах непосредственно по из(
меряемой поверхности детали (рис. 9.19).
Вследствие усредняющего эффекта воз(
душной подушки при взаимном враще(
нии опорного элемента и детали ось вра(
щения практически неподвижна и при
Рис. 9.19
ограниченной длине опорного элемента
Схема измерения с применением
проходит через центр средней окружно(
аэростатически центрированного
сти измеряемого сечения. Измеритель(
опорного элемента:
ный преобразователь закреплен в опорном
1 — контролируемая деталь; 2 — опорный
элемент; 3 — измерительный преобразо(
элементе. Отклонение от круглости опре(
ватель.
деляется как наибольшая разность пока(
заний отсчетного прибора за один оборот детали относительно опорного эле(
мента. При постоянной скорости вращения возможна регистрация профиля на
диаграмме.
ИЗМЕРЕНИЕ ПРИБОРОМ ДЛЯ КОНТРОЛЯ РАДИАЛЬНОГО БИЕНИЯ
Измеряемая деталь устанавливается в центрах (рис. 9.20). Деталь должна
вращаться с постоянной скоростью. Измерительным преобразователем регист(
рируется изменение радиусов детали в измеряемом сечении за один оборот.
После электрической фильтрации, подавляющей составляющую, вызванную
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
221
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
эксцентриситетом сечения относительно оси вращения (в данном случае общей
оси центровых отверстий), измерительный сигнал подается либо на показы
вающий прибор, либо на линейный самописец. Наибольшая разность показа
ний прибора за один оборот детали определяет отклонение от круглости отно
сительно средней окружности.
Рис. 9.20
Схема измерения прибором для контро
ля радиального биения:
1 — контролируемая деталь; 2 — измеритель
ный преобразователь; 3 — центровой прибор.
ИЗМЕРЕНИЕ НА КООРДИНАТНОИЗМЕРИТЕЛЬНЫХ ПРИБОРАХ
Деталь измеряется на двух или трехкоординатных приборах путем ощу
пывания достаточно большого количества точек реального профиля (рекомен
дуется не менее 12 точек). По координатам измеренных точек с помощью ПК
по соответствующим программам рассчитывается отклонение от круглости от
носительно средней или прилегающей окружности.
ИЗМЕРЕНИЕ СРЕДСТВАМИ
ДЛЯ КОНТРОЛЯ ДИАМЕТРА (ДВУХТОЧЕЧНОЕ ИЗМЕРЕНИЕ)
Метод осуществляется в двух вариантах: путем непрерывного измерения
при вращении детали относительно двухточечного измерительного средства
или измерением диаметров по отдельным направлениям. Пример реализации
метода измерения показан на рисунке 9.21. В процессе измерения деталь пово
рачивают не менее чем на 180° и фиксируют разность между наибольшим и
наименьшим диаметрами сечения DA = dmax – dmin. Отклонение от круглости
равно DA/2.
Возможно измерение диаметров в отдельных направлениях, равномерно
расположенных по периметру. В случае, когда отклонение от круглости имеет
вид овальности, оптимальными вариантами являются измерения в трех или
четырех направлениях (рис. 9.22). Определяется разность между наибольшим
и наименьшим значением измеренных диаметров DA. Отклонение от круглости
равно DA/F, где F — поправочный коэффициент, принимаемый равным: F = 1,6
при измерении в трех направлениях; F = 1,7 при измерении в четырех направ
лениях; F = 2 при измерении в шести и более направлениях.
Двухточечными измерениями можно пользоваться только в случаях, когда
отклонение от круглости имеет характер овальности или огранки с четным
числом граней. Измерение огранки с нечетным числом граней при точечном
222
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.21
Рис. 9.22
Схема измерения средствами для
контроля диаметра
(двухточечное измерение):
Измерение овальности в трех (а)
или четырех (б) направлениях
1 — контролируемая деталь; 2 — неподвиж
ная опора; 3 — измерительная головка; 4 —
боковой упор; 5 — стойка.
методе невозможно. Если отклонение от круглости содержит составляющие с
нечетным числом неровностей на периметре, то двухточечное измерение долж
но дополняться трехточечным.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ ПРИЗМЫ (ТРЕХТОЧЕЧНОЕ ИЗМЕРЕНИЕ)
Различают симметричную схему измерения, когда измерительный нако
нечник располагается по биссектрисе угла a призмы (рис. 9.23а), и несиммет
ричную схему, когда измерительный наконечник располагается под углом b к
биссектрисе (рис. 9.23б). Измеряемый вал устанавливают в призме и вращают.
Определяют наибольшее изменение показаний (DA) головки за один оборот.
Рис. 9.23
Измерения отклонений от круглости в призме:
а — симметричная схема; б — несимметричная схема; 1 — контролируемая деталь; 2 — приз
ма; 3 — измерительная головка; 4 — стойка.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
223
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Отклонение от круглости равно DA/Fп, где Fп — поправочный коэффициент,
который зависит от количества неровностей на периметре детали, угла a или
комбинации углов a и b. Рекомендуемые углы a и b, а также значения коэффи
циентов приведены в таблице 9.5. Трехточечные измерения применимы и для
отверстий (схемы измерения приведены на рисунке 9.24).
1234526789
868 3 428 6652 8
786552678 25268 89
68 8631118
656423785386552678
6 8 3258
3 26 812
6575
8
6 7!8"# $8
28%8"&'3!8
48%8()3118
28%8*&3!8
48%8*&38
28%8+&3!8
48%8")&38
28%8")&3!8
48%8+&38
12
52
2
92
2
2
62
2
372
332
312
352
3 2
392
34562
34562
82
141 2
82
34562
34562
82
141 2
82
34562
34562
82
141 2
34772
14772
74 32
14772
34772
82
14 32
82
34772
14772
74 32
14772
34772
82
812
54772
82
82
54772
82
82
54772
82
82
54772
82
82
54772
34962
34772
74 12
14772
82
14772
74 12
34772
34962
82
14772
82
34962
34772
1 2 3 4 5 6 2 7 89 7
5656423785386552678
28%8")&3!8
28%8+&3!8
28%8")&3!8
48%8+&3!8
48%8,&3!8
48%8&3!8
58%8+&38
58%8,&38
58%8"&38
14562
14772
34732
14772
74 12
14772
34732
14772
14562
82
34732
82
74 12
14772
34 32
14772
34 32
14772
74 52
14772
34 32
14772
34 32
82
74 52
82
34 32
14772
34 2
74662
74 2
34 52
34762
34 52
74 2
34592
74 2
3 52
34762
34 52
74 2
74662
5 252 128222222 !2"#!2$%
2 11282 $2 22 &2 &2 "2 2 "2 "'2 2 ("2
22)236732*242 111282 "2 2 "2 "+2 2 !2 ,#-2 ""42 +%
.2 "!2 " "2 2 2 "$42 '.2 $2 "2 $" 2 2 '2
'2$"!2/""#22"#2'22
Рис. 9.24
Трехточечное измерение отклонений от круглости отверстий:
а — симметричная схема; б — несимметричная схема.
224
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
СЕДЛООБРАЗНОЙ ПРИЗМЫ (НАЕЗДНИКА)
Контролируемая деталь (рис. 9.25) вращается в центрах, призмах или па/
троне. На деталь устанавливается наездник. Измерительной головкой регист/
рируется изменение показаний за один оборот детали. Отклонение от кругло/
сти определяется по формуле DA/Fп, где Fп — поправочный коэффициент. Зна/
чения углов призмы a и коэффициента Fп приведены в таблице 9.6. Область
применения метода та же, что и методов измерения с помощью призмы. Воз/
можно измерение деталей на станке.
Рис. 9.25
Схема измерения с применением седлообразной призмы:
1 — контролируемая деталь; 2 — наездник; 3 — измерительная головка; 4 — центры.
1 2 3 4 5 6 2 7 89 7
1234526789
86868 6652
3 428
66528118
28 8
8 7823526
8
3 428
66528118
28 8
188 !28
188"#28
188!#28
12
34562
34772
74812
92
14772
62
14 12
14772
34772
372
14 72
34772
82
146 2
14832
345 2
332
14772
14772
2
52
34772
14772
14772
312
748 2
14832
2
2
746 2
34772
14352
362
74 12
14772
2
2
74 12
14772
382
746 2
34772
2
748 2
345 2
352
34772
2
74832
188 !28
188"#28
1
2
2
188!#28
34772
74812
74812
34772
1
5 252 2 222222 !2"#!2$ 2
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
225
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЕ
С ПРИМЕНЕНИЕМ НАЕЗДНИКА
С САМОУСТАНАВЛИВАЮЩИМИСЯ
ОПОРАМИ
Рис. 9.26
Схема измерения с применением
наездника с самоустанавливающимися
опорами:
1 — контролируемая деталь; 2 — корпус;
3 — подвижные каретки; 4, 5 — балансиры
ступеней; 6 — измерительный преобразова+
тель.
Деталь вращается в центрах, призмах,
патронах и т. п. Измерительное устройст+
во (рис. 9.26) состоит из корпуса 2, под+
вижных кареток 3, балансиров первой 4 и
второй 5 ступеней, оси качания которых
закреплены на подвижных каретках пер+
вой ступени. Перед измерением каретки
устанавливаются по шкалам в положение,
соответствующее диаметру измеряемой де+
тали. При вращении детали благодаря са+
моустанавливающимся опорам создается
эффект стабилизации положения центра,
относительно которого с помощью изме+
рительного преобразователя фиксируют+
ся изменения радиусов сечения детали за
один ее оборот. Отклонение от круглости
определяют по наибольшей разности пока+
заний отсчетного устройства или по профи+
лограмме. Базой является средняя окруж+
ность. Метод применим при любом харак+
тере отклонения от круглости для деталей
относительно больших габаритных разме+
ров, в том числе и на станках.
ИЗМЕРЕНИЕ КОМБИНИРОВАННЫМ
ДВУХ+ И ТРЕХТОЧЕЧНЫМ
СПОСОБОМ
С ПРИМЕНЕНИЕМ ПРИЗМЫ
Рис. 9.27
Схема измерения комбинированным
двух+ и трехточечным способом с
применением призмы:
1 — контролируемая деталь; 2 — призма;
3, 4 — измерительные головки.
226
Powered by TCPDF (www.tcpdf.org)
Деталь устанавливается в призме и ощу+
пывается одновременно или последова+
тельно двумя измерительными головками
(рис. 9.27), одна из которых осуществля+
ет измерение перпендикулярно к грани
призмы (двухточечное измерение), а дру+
гая — трехточечное. Рекомендуется ис+
пользовать углы призмы a = 60 или 120°
и несимметричную схему, при которой
направление измерения параллельно гра+
ни призмы. При вращении измеряемой
детали определяют максимальные разно+
сти показаний DA1 и DA2 обеих головок.
Для рекомендуемых углов призмы откло+
нение от круглости принимают равным
DAmax/2, где DAmax — большее из значений
DA1 и DA2. Предварительное определение
числа граней профиля не требуется.
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
9.2.4. ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ЦИЛИНДРИЧНОСТИ
ОБЩИЕ ПОЛОЖЕНИЯ
Отклонение от цилиндричности — наибольшее расстояние D от точек ре
альной поверхности до прилегающего цилиндра в пределах нормируемого уча
стка. Измерение отклонений от цилиндричности осуществляется путем изме
рения ограниченного количества отдельных точек или профилей (линий), ле
жащих на проверяемой поверхности. Чем больше измеряемых точек или линий,
тем полнее результат измерения соответствует стандартному определению от
клонения от цилиндричности.
В зависимости от расположения и числа измеряемых линий или точек раз
личают следующие методы измерения отклонения от цилиндричности: метод
поперечных сечений; метод образующих; метод винтовой линии; метод экстре
мальных значений.
Каждый из методов может осуществляться либо непрерывным измерением
по линиям, либо дискретным измерением по отдельным точкам. Если домини
рует какаялибо определенная составляющая отклонения в поперечном или
продольном сечениях, то предпочтительно применять соответственно метод по
перечных сечений или метод образующих.
Метод поперечных сечений. Измеряемая
поверхность выверяется на приборе так, что
бы ее ось (например, в первом приближе
нии — прямая, проходящая через центры
крайних поперечных сечений) была совме
щена с осью вращения прибора или парал
лельна ей. После этого поверхность измеря
ется в нескольких поперечных сечениях от
общей базовой оси, в том числе в начале и
конце нормируемого участка (рис. 9.28а).
Рис. 9.28
Измеренные профили записываются на од
Измерение отклонения от цилинд
ричности методом поперечных
ной и той же полярной диаграмме, и на ней
сечений:
проводится прилегающая окружность, об
а — расположение измеряемых попереч
щая по отношению ко всем профилограммам ных сечений A, Б, В; б — соответственно
(рис. 9.28б). Наибольшее расстояние от то профилограммы измерительных сечений
Aс, Бс, Вс; О — центр общей прилегающей
чек профилограмм до прилегающей окруж окружности.
ности есть отклонение от цилиндричности D.
Метод образующих. После выверки поверхности она измеряется в несколь
ких продольных сечениях (рис. 9.29а). Измеренные профили записываются на
одной и той же линейной диаграмме и на ней строится прилегающий профиль
продольного сечения, общий по отношению ко всем профилограммам образую
щих (рис. 9.29б). Наибольшее расстояние от точек профилограмм до соответст
вующей стороны прилегающего профиля есть отклонение от цилиндричности.
Метод винтовой линии. После выверки поверхности ее измеряют в двух
крайних поперечных сечениях и по винтовой линии (рис. 9.30). Рекомендует
ся, чтобы на длине нормируемого участка укладывалось целое число шагов (не
менее 2х) винтовой линии. Измеренные профили записывают на одной поляр
ной диаграмме и оценивают так же, как и при методе поперечных сечений.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
227
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.29
Измерение отклонения от цилиндричности методом образующих:
а — расположение измеряемых продольных сечений A, Б, В; б — профилограммы образующих.
Рис. 9.30
Измерение отклонения от цилиндрично
сти методом винтовой линии
Метод экстремальных значений. После выверки поверхности измеряют две
образующие одного продольного сечения. По записанным на линейной диа
грамме профилограммам находят осевое положение экстремальных точек об
разующих, которыми определяется отклонение профиля продольного сечения.
В выявленных таким образом двух осевых положениях измеряют профили попе
речных сечений с одного установа детали. Записывают их профилограммы на
одной полярной диаграмме и оценивают как при методе поперечных сечений.
1 2 3 4 5 6 2 7 89 7
12324567389 862 9 8 24994 9 932 6232 2 8 9
2 2499322 8 683932 8 26232 38 2
198 249932
6232
8 9
1234546789 4647
5 9
722 7
3234546789
7289
!" 54#$789 7647
352%2$724& 3234546789
228
Powered by TCPDF (www.tcpdf.org)
12324567389 862 9 8
9 932
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Минимальное количество измеряемых сечений, линий, точек при различ
ных стратегиях измерения рекомендуется принимать в соответствии с табли
цей 9.7. Это количество рекомендуется увеличивать с увеличением диаметра и
длины поверхности и с уменьшением допуска цилиндричности.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ ПРИБОРА,
ИМЕЮЩЕГО ПРЕЦИЗИОННЫЕ
ВРАЩАТЕЛЬНОЕ И ПРЯМОЛИНЕЙНОЕ ПЕРЕМЕЩЕНИЯ
Схема прибора (цилиндромера) с вра
щающейся измеряемой деталью показана
на рисунке 9.31. Возможна также схема с
вращающимся измерительным преобразо
вателем. Кроме вращающегося шпинделя
прибор имеет прецизионную прямолиней
ную направляющую, выставленную парал
лельно оси вращения шпинделя.
Перед измерением деталь центрируют
и нивелируют по двум сечениям, находя
щимся на границах нормируемого участка.
С помощью измерительного преобразовате
ля поверхность измеряется по отдельным
линиям, и записываются профилограммы
измеренных сечений. Возможно примене
ние любого из описанных выше методов из
мерения. Если цилиндромер снабжен ПК,
то измерение в каждом выбранном сечении
производится дискретно и по координатам
измеренных точек в соответствии с про
граммой вычисляется отклонение от ци
линдричности. Метод измерения является
наиболее точным.
Рис. 9.31
Схема измерения с применением
прибора, имеющего прецизионные
вращательное и прямолинейное
перемещения:
1 — контролируемая деталь; 2 — стол, ус
тановленный на точном шпинделе; 3 — из
мерительный преобразователь; 4 — элек
тронный блок обработки результатов изме
рений; 5 — плоскость центрирования; 6 —
плоскость нивелирования; 7 — электродви
гатели.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
ТРЕХКООРДИНАТНОЙ ИЗМЕРИТЕЛЬНОЙ МАШИНЫ
Деталь помещают на стол КИМ, ориентируют в направлении одной из коор
динатных осей и измеряют координаты отдельных точек боковой поверхности
цилиндра. Применяется в основном метод измерения в поперечных сечениях,
но возможны и другие стратегии измерения. По координатам измеренных то
чек с помощью ПК определяется базовый цилиндр (средний, прилегающий
или другой, предусмотренный программой) и отклонение от цилиндричности.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
АЭРОСТАТИЧЕСКИ ЦЕНТРИРОВАННОГО ОПОРНОГО ЭЛЕМЕНТА
Схема измерения вала показана на рисунке 9.32. Аналогичная схема изме
рения применима для отверстий. Опорный элемент в виде пробки или кольца
базируется на аэростатических опорах непосредственно по измеряемой поверх
ности детали.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
229
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Благодаря усредняющему действию
воздушной подушки, образующейся меж
ду опорным элементом и измеряемой по
верхностью, происходит их самоцентри
рование. В опорном элементе размещены
измерительные преобразователи в соот
ветствии с выбранной стратегией измере
ния. Настройка их показаний на нуль про
изводится по образцовой цилиндрической
детали. При измерении опорный элемент
Рис. 9.32
Схема измерения вала:
совершает круговое и/или осевое переме
1 — контролируемая деталь; 2 — измери
щение относительно детали. По отсчетным
тельные головки; 3 — несущий элемент на
устройствам определяются отклонения из
аэростатических опорах.
меренных точек, алгебраическая разность
между наибольшим и наименьшим показаниями соответствует отклонению от
цилиндричности относительно среднего цилиндра.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
ПРИБОРОВ ДЛЯ КОНТРОЛЯ РАДИАЛЬНОГО БИЕНИЯ
Измеряемая деталь типа вала, имеющая центровые отверстия, устанавли
вается в центрах прибора. В варианте метода с одной измерительной головкой
последняя перемещается по точной прямолинейной направляющей, параллель
ной оси центров (рис. 9.33). Используя любой метод измерения (см. табл. 9.7)
при вращении детали и прямолинейном перемещении измерительной головки,
измеряется полное радиальное биение поверхности относительно общей оси
центровых отверстий, которое принимается за отклонение от цилиндричности.
В варианте метода с несколькими измерительными головками (рис. 9.34),
устанавливаемыми на нуль по цилиндрическому образцу, отпадает необходи
мость в прямолинейном перемещении головок. Отклонение от цилиндрично
сти определяется как разность между наибольшим и наименьшим показания
ми всех измерительных головок за один оборот детали. Профилограммы обра
зующих регистрируются на линейной диаграмме.
Результаты измерения этими методами (рис. 9.33 и 9.34) включают влия
ние отклонения от соосности измеряемой поверхности относительно оси цен
тровых отверстий.
Рис. 9.33
Рис. 9.34
Схема измерения с одной измеритель
ной головкой:
Схема измерений с несколькими
измерительными головками:
1 — измеряемая деталь; 2 — измерительная
головка; 3 — центровой прибор.
1 — контролируемая деталь; 2 — измеритель
ная головка; 3 — центровой прибор.
230
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРЕНИЕ СРЕДСТВАМИ
ДЛЯ КОНТРОЛЯ ДИАМЕТРА (ДВУХТОЧЕЧНОЕ ИЗМЕРЕНИЕ)
Схема двухточечного измерения откло.
нения от цилиндричности приведена на
рисунке 9.35. В качестве средства измере.
ния могут применяться любые подходящие
двухточечные приборы: стационарные или
ручные. Одной из стратегий является из.
мерение диаметра поверхности. Затем оп.
ределяют разность Dd между наибольшим
и наименьшим диаметрами во всех изме.
ренных точках поверхности. Отклонение
от цилиндричности равно Dd/2.
Данный метод измерения недостато.
чен, если отклонение от цилиндричности
содержит составляющие в виде нечетной
огранки или отклонения от прямолиней.
ности оси (образующие в продольном сече.
нии эквидистанты) и должен дополняться
измерением этих составляющих специаль.
ными методами, например трехточечным
измерением.
Рис. 9.35
Схема двухточечного измерения
отклонения от цилиндричности:
1 — контролируемая деталь; 2 — двухточеч.
ный измерительный прибор; 3 — повероч.
ная плита.
9.2.5. ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ПРОФИЛЯ
ПРОДОЛЬНОГО СЕЧЕНИЯ
ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ
ОБЩИЕ ПОЛОЖЕНИЯ
Отклонение профиля продольного сечения — наибольшее расстояние D от
точек образующей реальной поверхности, лежащей в плоскости, проходящей
через ее ось, до соответствующей стороны прилегающего профиля в пределах
нормируемого участка. Измерение отклонения профиля продольного сечения
рекомендуется производить не менее чем в трех, расположенных равномерно
по окружности, продольных сечениях. В каждом продольном сечении измеря.
ют обе образующие непрерывным или дискретным методом. В случае дискрет.
ных измерений минимальное количество точек, измеряемых на одной обра.
зующей, следует принимать в соответствии с таблицей 9.8. При определенном
характере отклонения это количество может быть увеличено или уменьшено.
1 2 3 4 5 6 2 7 89 7
12324567389 862 9 8 8 9 2 2 9384 2499322
8 683932 826 8867388 9 932
6235 38429488 5 5 44
862 9 8 8 9 249932
35 58 859 39 49399
123453
457893
8974 93
4 97 893
897 693
3 693
63
83
3
3
3
443
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
231
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
За отклонение профиля продольного сечения принимается наибольшая из
величин, измеренных в разных сечениях.
Оценка отклонения профиля продольного сечения по результатам измере
ния образующих производится либо ручной обработкой профилограмм, либо с
помощью ПК по специальным программам. В отдельных случаях возможна
оценка непосредственно по показаниям отсчетного устройства.
При оценке по профилограммам вначале должны быть получены профило
граммы обеих образующих продольного сечения на одной диаграмме либо с
помощью записывающего устройства, либо построением по точкам. Необходи
мо, чтобы начальные точки обеих профилограмм соответствовали одному попе
речному сечению, а профилограммы были правильно ориентированы относи
тельно материала измеряемой детали. По совмещенным профилограммам стро
ится прилегающий профиль — пара параллельных прямых, касательных к
профилограммам с внешней по отношению к материалу детали стороны и рас
положенных так, чтобы наибольшее расстояние от одной из этих прямых до
соответствующей профилограммы, измеренное по оси ординат (отклонений),
было минимальным.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ ПРИБОРА
ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ ЦИЛИНДРИЧНОСТИ
Измеряемая поверхность детали центрируется и нивелируется на столе при
бора (цилиндромера, см. рис. 9.31) с тем, чтобы ее ось совпала с осью вращения
шпинделя. С помощью измерительного преобразователя, перемещающегося по
прямолинейной направляющей прибора, измеряется одна, а затем, после пово
рота на 180°, вторая образующая продольного сечения. Оценка производится
по совмещенным профилограммам. Если противолежащая образующая может
быть измерена при неизменном положении детали, то отпадает погрешность,
вызванная неточным центрированием и нивелированием поверхности. Прин
ципиально по той же схеме производится измерение на прямомере (см. рис. 9.2).
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
ТРЕХКООРДИНАТНОГО ИЗМЕРИТЕЛЬНОГО ПРИБОРА
Поверхность выверяется вдоль одного из координатных направлений КИМ.
Пара образующих продольного сечения ощупывается головкой КИМ. Отклоне
ние профиля продольного сечения вычисляется с помощью ПК.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
ДВУХКООРДИНАТНОГО ИЗМЕРИТЕЛЬНОГО ПРИБОРА
Деталь устанавливается на призме (призмах) или в центрах на столе прибо
ра и выверяется так, чтобы плоскость измеряемого продольного сечения была
параллельна плоскости сравнения. Измеряются координаты точек, лежащих
на образующих сечения, по которым строится профилограмма сечения и про
изводится расчет отклонения формы, используя ПК.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
ПРИБОРА ДЛЯ ИЗМЕРЕНИЯ БИЕНИЯ
Схема измерения аналогична показанной на рисунке 9.33. Деталь уста
навливается в центрах прибора. В приборе должна быть предусмотрена прямо
линейная направляющая, параллельная оси центров. Измерительной голов
кой или измерительным преобразователем, перемещающимся по направляю
232
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
щей, измеряют по точкам или непрерывно одну образующую, а после поворота
детали на 180° — другую. Оценка отклонения производится по профилограм
ме. При использовании нескольких измерительных головок, настраиваемых
по цилиндрическому образцу, отпадает необходимость в прямолинейных на
правляющих (см. рис. 9.34). Отклонение от параллельности оси сечения отно
сительно оси центровых отверстий вызывает погрешность измерения. Ее мож
но исключить, если проводить измерение обеих образующих при неизменном
положении детали.
ИЗМЕРЕНИЕ С ПРИМЕНЕНИЕМ
ДВУХТОЧЕЧНОГО ИЗМЕРИТЕЛЬНОГО ПРИБОРА
Возможно применение ручных и ста
ционарных двухточечных приборов (рис.
9.36). Измерениями диаметров в различ
ных точках одного продольного сечения
определяют разность DA между наиболь
шим и наименьшим показаниями прибо
ра. Отклонение профиля продольного сече
ния будет равно DA/2.
Данный метод измерения недостаточен,
если образующие в продольном сечении
имеют отклонение от прямолинейности, но
эквидистанты. Если имеются такие откло
нения, следует применять дополнительно
другие методы измерения.
Рис. 9.36
Схема измерения с применением
двухточечного измерительного
прибора:
1 — контролируемая деталь; 2 — повероч
ная плита; 3 — двухточечный измеритель
ный прибор.
9.2.6. ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ПАРАЛЛЕЛЬНОСТИ
ОБЩИЕ ПОЛОЖЕНИЯ
Отклонение от параллельности плоскостей — разность D наибольшего и наи
меньшего расстояний между плоскостями в пределах нормируемого участка.
Кроме того, различают отклонения от параллельности оси (прямой) относи
тельно плоскости, прямых в плоскости и осей (прямых) в пространстве. Под
прямыми, кроме осей отверстий и валов, понимают кромки тел, образующих
цилиндрические поверхности и плоскости, ширина которых существенно мень
ше по сравнению с их длиной. Соответственно названным отклонениям от па
раллельности различают методы их измерений.
Под плоскостью сравнения в методах измерения отклонений от параллель
ности понимается плоскость, которая используется в качестве базы при изме
рении и к которой относятся отклонения измерительного элемента (обычно это
поверочная плита).
Во многих методах измерения отклонений от параллельности для исключе
ния влияния отклонений формы (от плоскостности или прямолинейности) ба
зовых и измеряемых поверхностей детали применяют средства измерений с
образцовой плоскостью (поверочные плиты, плоскопараллельные пластины или
планки). Если поверхности детали имеют отклонения формы в виде выпуклости,
то для обеспечения устойчивого положения детали относительно образцовой
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
233
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
плоскости между ними следует помещать подкладки одинаковой толщины,
например плоскопараллельные концевые меры длины.
Если отклонение от параллельности (или перпендикулярности) измеряют
на длине L1, отличающейся от длины нормируемого участка L, то измеренную
разность показаний отсчетного прибора D1 приводят к длине L по формуле
D = |D1|L/L1 (см. рис. 9.37, 9.40, 9.41).
Если отклонение от параллельности измеряется как разность наклонов Dj в
угловых единицах, то пересчет этой разности в линейные единицы D на длине L
производят по формуле D = DjL/200 (D — в мкм, Dj — в с, L — в мм).
ИЗМЕРЕНИЕ ОТКЛОНЕНИЙ ОТ ПАРАЛЛЕЛЬНОСТИ ПЛОСКОСТЕЙ
Измерение по разности расстояний
приборами для линейных измерений
с использованием плоскопараллельной
пластины или без нее
Рис. 9.37
Схема измерения по разности
расстояний приборами для линей?
ных измерений:
1 — контролируемая деталь; 2 — плос?
кость сравнения; 3 — плоскопараллель?
ная пластина; 4 — измерительная голов?
ка; 5 — точки измерения; 6 — намарки?
рованный контур детали.
Деталь устанавливается базовой поверх?
ностью на поверочную плиту. Для исключе?
ния влияния отклонений формы измеряемой
поверхности на нее накладывают плоскопа?
раллельную пластину (рис. 9.37). С помощью
измерительной головки, базирующейся в стой?
ке на плиту, производят непрерывное изме?
рение или по отдельным точкам свободной по?
верхности пластины по контуру измеряемой
поверхности.
Если этот контур прямоугольный, то до?
статочно измерить четыре угловые точки. От?
клонение от параллельности определяют как
разность наибольшего и наименьшего показа?
ний измерительной головки. Метод измерения
с ощупыванием непосредственно измеряемой
поверхности применяют, если отклонение фор?
мы этой поверхности мало по сравнению с от?
клонением от параллельности, когда отсутст?
вует плоскопараллельная пластина или ее
применение нецелесообразно.
Измерение с применением КИМ
Рис. 9.38
Схема измерения с применением
КИМ:
1 — контролируемая деталь; 2 — КИМ.
234
Powered by TCPDF (www.tcpdf.org)
Деталь помещается на столе КИМ так, что?
бы базовая и измеряемая поверхности могли
быть ощупаны измерительной головкой КИМ
(рис. 9.38). Количество и расположение точек
измерения выбирается с учетом размеров,
контура и отклонений формы измеряемых по?
верхностей, а также возможностей программ?
ного обеспечения КИМ. По координатам из?
меренных точек поверхностей определяются
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
их средние или прилегающие плоскости и разность между наибольшим и наи
меньшим расстоянием между ними в пределах нормируемого участка. Воз
можна установка детали на столе КИМ базовой поверхностью (см. рис. 9.11).
При этом ощупывается только измеряемая поверхность.
Измерение по углу наклона приборами для линейных измерений
с применением плоскопараллельной пластины или без нее
Деталь устанавливается базовой поверх
ностью на плоскость сравнения: круглый
стол с ручным или моторным приводом (рис.
9.39). На измеряемую поверхность накла
дывается плоскопараллельная пластина, ко
торая должна покрывать эту поверхность
полностью. Измеряется торцовое биение от
крытой поверхности пластины или высту
пающей части поверхности, опирающейся
на деталь. Наибольшая разность показаний
отсчетного устройства за один оборот дета
ли вместе с пластиной является отклонени
ем от параллельности на диаметре ощупы
вания, которое пересчитывается на длину
нормируемого участка.
Плоскопараллельная пластина факти
чески материализует прилегающую плос
кость, исключая влияние на результаты из
мерений отклонений от плоскостности.
Если нет круглого стола, то измерение
можно провести с установкой детали на пове
рочной плите поворотом ее от руки под изме
рительной головкой.
Измерение без пластины применяют, ес
ли отклонения от плоскостности измеряе
мой поверхности относительно малы.
Рис. 9.39
Схема измерения по углу наклона
приборами для линейных измере
ний:
1 — контролируемая деталь; 2 — плос
кость сравнения; 3 — плоскопараллель
ная пластина; 4 — измерительный пре
образователь; 5 — устройство обработки
данных.
Измерение по углу наклона приборами
для линейных измерений с применением
плоскопараллельной планки
Деталь и стойка измерительной головки
устанавливаются на плоскость сравнения
(рис. 9.40). На измеряемую поверхность на
кладывают плоскопараллельную планку,
например поверочную линейку, длина ко
торой должна быть больше длины измеряе
мой поверхности. Планка ощупывается с по
мощью измерительной головки в крайних
точках определенного участка L1, измере
ние повторяют с изменением направления
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
Рис. 9.40
Схема измерения по углу наклона
приборами для линейных измерений
с применением плоскопараллельной
планки:
1 — контролируемая деталь; 2 — плос
кость сравнения; 3 — плоскопараллель
ная планка; 4 — измерительная головка.
235
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
измерения (поворотом планки) на 45°. Между двумя направлениями, в кото
рых была отмечена наибольшая разность отсчетов в крайних точках участка,
планку устанавливают в промежуточное положение. Из разностей показаний
по краям участка, измеренных в пяти положениях планки, выбирают наиболь
шую. Она является отклонением от параллельности на длине L1, которое пере
считывается на длину нормируемого участка.
Метод применяется, когда использование плоскопараллельной пластины
невозможно или нецелесообразно.
ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ
ОТ ПАРАЛЛЕЛЬНОСТИ ОСИ И ПЛОСКОСТИ
Измерение с применением приборов для линейных измерений
Измеряемая деталь базовой поверхностью и стойка измерительной головки
устанавливаются на поверочную плиту (рис. 9.41). Ось измеряемого отверстия
(отверстий) материализуется оправкой: цилиндрической или с малой конусно
стью. Возможно использование бесконтактных оправок на аэростатической опо
ре. Положение оправки измеряется в двух
точках на расстоянии L1. Разность пока
заний измерительной головки A1 и A2 —
есть отклонение от параллельности D на
длине L1.
Измерение с применением уровней
Рис. 9.41
Схема измерения с применением
приборов для линейных измерений:
1 — контролируемая деталь; 2 — плоскость
сравнения; 3 — цилиндрическая оправка;
4 — измерительная головка.
Измеряемая деталь базовой поверхно
стью устанавливается на плиту (рис. 9.42).
Ось отверстия материализуется оправкой,
которая должна выступать из отверстия.
Уровнем измеряют наклон оправки и плос
кости сравнения в направлении оси оправ
ки и в непосредственной близости от нее.
Разность наклонов является отклонением
от параллельности в угловых единицах,
которое пересчитывается в линейные еди
ницы на длине нормируемого участка.
Измерение с применением
зрительной трубы
Рис. 9.42
Схема измерения с применением
уровней:
1 — контролируемая деталь; 2 — плоскость
сравнения; 3 — контрольная оправка; 4 —
уровень.
236
Powered by TCPDF (www.tcpdf.org)
Схема измерения показана на рисун
ке 9.43. При помощи визирной марки в
положениях A и Б выставляют зрительную
трубу параллельно плоскости сравнения,
на которой установлена базовой плоско
стью контролируемая деталь.
Затем с помощью другой визирной мар
ки, материализующей центр сечения от
верстия, и зрительной трубы определяют
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ординаты центров отверстия в двух наи
более разнесенных поперечных сечениях.
Для длинных отверстий дополнительно
определяют ординату центра среднего се
чения. Если измеряется положение общей
оси нескольких отверстий, то предвари
тельно измеряют ординаты центров двух
сечений каждого отверстия. По измерен
ным ординатам центров сечений строят
диаграмму, на которой определяют ось
(или общую ось) и отклонение от парал
лельности как разность ординат точек оси
на длине L.
Рис. 9.43
Схема измерения с применением
зрительной трубы:
1 — контролируемая деталь; 2 — плоскость
сравнения; 3 — визирная марка; 4 — зри
тельная труба; 5 — источник света.
Измерение с применением КИМ
Базовая поверхность и отверстие детали ощупывается измерительной го
ловкой КИМ. Число точек измерения в каждом сечении отверстия и на плоско
сти зависит от отклонений формы этих поверхностей и возможностей программ
ного обеспечения. С помощью ПК по координатам измеренных точек сечений
находят координаты их центров, а по последним — общую ось; по координатам
точек базовой поверхности находится средняя или прилегающая плоскость, а
затем — отклонение от параллельности.
ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ
ОТ ПАРАЛЛЕЛЬНОСТИ ПРЯМЫХ В ПЛОСКОСТИ
Измерение приборами
для измерения формы
с применением прецизионного
прямолинейного перемещения
На приборе (рис. 9.44) последователь
но измеряются и записываются на диа
грамме один под другим профили обеих из
меряемых линий, например образующих
цилиндрических поверхностей. По профи
лограммам проводятся прилегающие пря
мые. Разность расстояний между ними на
заданной длине с учетом масштабов опре
деляет отклонение от параллельности.
Измерение приборами
для линейных измерений
с применением
плоскопараллельной планки
Схема измерения аналогична схеме,
представленной на рисунке 9.40, но изме
рение производится лишь в одном направ
лении.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
Рис. 9.44
Схема измерения приборами для
измерения формы с применением
прецизионного прямолинейного
перемещения:
1 — контролируемая деталь; 2 — стол при
бора; 3 — измерительный преобразователь;
4 — самописец.
237
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Измерение с применением уровня
и плоскопараллельной планки
Деталь устанавливается базовой гра
нью (линией) на плоскость сравнения (рис.
9.45). На измеряемую грань накладыва
ется плоскопараллельная планка. С помо
щью уровня определяются наклон плос
кости сравнения и наклон планки в задан
ном направлении. Разность этих наклонов
является отклонением от параллельности,
выраженным в угловых единицах.
Рис. 9.45
Схема измерения с применением
уровня и плоскопараллельной планки:
1 — контролируемая деталь; 2 — плоскость
сравнения; 3 — плоскопараллельная планка;
4 — уровень.
Рис. 9.46
Схема измерения с применением
прибора для линейных измерений при
прямом ощупывании измеряемой
поверхности:
1 — контролируемая деталь; 2 — плоскость
сравнения; 3 — измерительная головка.
Измерение с применением прибора
для линейных измерений при прямом
ощупывании измеряемой поверхности
Деталь устанавливается базовой гра
нью (или плоскостью) на плоскость срав
нения (рис. 9.46). Измеряемая линия ощу
пывается в отдельных точках измеритель
ной головкой на стойке, базирующейся на
плоскости сравнения. Расстояние между
точками измерения принимают 0,1 от дли
ны нормируемого участка. По измерен
ным точкам строят профилограмму, про
водят прилегающую прямую и определя
ют разность ординат этой прямой на длине
нормируемого участка. Если отклонения
от прямолинейности измеряемого профи
ля относительно малы, то достаточно из
мерить начальную и конечную точки нор
мируемого участка и определить разность
их показаний.
Измерение с применением КИМ
Измеряемая деталь устанавливается на столе двух или трехкоординатного
измерительного прибора. С помощью механической или оптической измери
тельной головки ощупываются по точкам обе измеряемые линии. Расстояние
между точками измерения не должно превышать 0,1 длины нормируемого уча
стка. С помощью ПК по координатам измерения точек определяются средние
или прилегающие прямые и разность расстояний между ними на длине норми
руемого участка.
ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ
ОТ ПАРАЛЛЕЛЬНОСТИ ОСЕЙ (ИЛИ ПРЯМЫХ) В ПРОСТРАНСТВЕ
Измерение с применением приборов для линейных измерений
Измеряемая деталь устанавливается на плоскость сравнения и ориентиру
ется так, чтобы общая плоскостность осей была примерно параллельна плоско
сти сравнения (рис. 9.47). Оси отверстия материализуются контрольными оп
равками. Отклонение от параллельности осей в общей плоскости определяют
238
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.47
Схема измерения с применением приборов для линейных измерений:
1 — контролируемая деталь; 2 — плоскость сравнения; 3 — контрольная оправка; 4 — измеритель
ная головка; 5 — блок концевых мер длины; 6 — накладное устройство; 7 — упор с плоским наконеч
ником.
по разности расстояний между оправками на длине нормируемого участка, из
меренных приборами для линейных измерений или блоками концевых мер
длины (рис. 9.47а). Перекос осей определяют по разности отсчетов измеритель
ной головки, устанавливаемой в стойке на плоскости сравнения, в четырех
точках (на каждой оправке в двух точках на расстоянии, равном длине норми
руемого участка) (рис. 9.47б). Измерение перекоса осей может выполняться
также измерительной головкой накладного устройства с упорами, имеющими
плоские наконечники (рис. 9.47в). В последнем случае измерительная головка
настраивается по образцу, например, плоскостности. Отклонение от параллель
ности осей в пространстве определяется геометрической суммой отклонения от
параллельности в общей плоскости и перекоса осей. Для измерения отклоне
ния от параллельности осей в общей плоскости можно вместо схемы измерения
(рис. 9.47а) использовать другую схему (рис. 9.47г), в которой предусматрива
ется поворот контролируемой детали на 90°.
Измерение с применением уровней
Измеряемую деталь устанавливают так, чтобы общая плоскость осей распо
лагалась горизонтально (рис. 9.48а,б). Оси отверстий материализуются кон
трольными оправками, выступающими так, чтобы можно было установить уро
вень. При помощи уровней определяют наклоны оправок, разность которых
является мерой перекоса осей. Затем деталь поворачивают на 90° (рис. 9.48в).
Разность наклонов оправок, измеренных уровнями в этом положении, опреде
ляет отклонение от параллельности осей в их общей плоскости.
Рис. 9.48
Измерение отклонений от параллельности осей уровнями:
а, б — перекос осей; в — отклонение в общей плоскости осей; 1 — контролируемая деталь; 2 — кон
трольная оправка; 3 — уровень; 4 — плоскопараллельная планка.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
239
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Измерение с применением КИМ
Измеряемые отверстия ощупываются измерительной головкой КИМ в не
обходимом количестве радиальных сечений и точек. По измеренным коорди
натам точек сечения определяют координаты их центров, по координатам цен
тров — оси отверстий и угол между осями, который является мерой для оценки
отклонения от параллельности осей в пространстве.
9.3. РАСЧЕТ ТОЧНОСТИ
КОНТРОЛЬНОИЗМЕРИТЕЛЬНЫХ
ПРИСПОСОБЛЕНИЙ
9.3.1. ОБЩИЕ ПОЛОЖЕНИЯ
Контрольноизмерительное приспособление может быть ис
пользовано для измерений, если его действительная погрешность DКИП меньше
или равна предельно допустимой [DКИП]:
DКИП £ [DКИП].
(9.1)
Предельно допустимая погрешность регламентируется ГОСТ 8.05181. Ее
можно определить по таблицам справочников [2], [21] или найти по формуле
[DКИП] = K × Tп,
(9.2)
где Tп — допуск контролируемого параметра; K — коэффициент, зависящий
от величины допуска (табл. 9.9).
1 2 3 4 5 6 2 7 8987
12344565789
2 7757 2 2 952 278295 29 7558
2 42
55 22785 582 7855! 2 1
11231
45631
647841
45641
9472441
45231
212441
45241
5 25 1
1 1 1 51 51 1 51
!1 51 1"1#1" 1 11! 1 $
11 1%
1
При проектировании КИП обычно производят проверочный расчет для оцен
ки выполняемости условия (9.1). В таком расчете действительная погрешность
заменяется расчетной величиной, для определения которой можно использо
вать формулу, аналогичную применяемой для расчета погрешности механиче
ской обработки [1], [10], [22], [29]:
1 КИП 2 1,2 12y1 3 12y2 3 12н 3 12д 3 12и 3 12м ;
(9.3)
1 y1 2 12б1 3 12з1 3 12пр1 ;
(9.4)
1 y2 2 12б2 3 12з2 3 12пр2 ,
(9.5)
где Dу1 — погрешность установки изделия на первичном приспособлении (на
оправке, во втулке и т. п.); Dу2 — погрешность установки изделия с оправкой
240
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
и т. п. во вторичном приспособлении, например в центровом приборе; Dб1, Dб2 —
погрешности базирования на первичном и вторичном приспособлении соответ
ственно, они возникают в связи с несовпадением измерительных баз, особенно
стями формы базовых поверхностей изделия и установочных элементов при
способлений, образованием зазоров; погрешности базирования рассчитывают
ся в каждом конкретном случае отдельно; Dз1, Dз2 — погрешности закрепления;
они вызываются действием сил зажима, которые деформируют, смещают, пе
рекашивают контролируемое изделие и детали КИП [25], [31], [40]. Для от
дельных частных случаев их значения приведены в таблице 9.10; Dпр1, Dпр2 —
погрешности приспособлений; они связаны с их изготовлением, в том числе со
1 2 3 4 5 6 2 7 89
12345367894 34293678
, +7345 378
2424$73%8
12345678349
8
2 579842 8
65 4996798 228
356538
18
8
97 298 9 4345884
57 9665818
% "8
548
9773894 34298
4 3429)8
&4' 7(3429)8
1884 778
$ *454%8
* 773 8118++8
!"784#28$73%8
457 8
583 5738
$4 8457 34297%8
34298
* '49458
)36 8 94 -756 8
)34+8 42754+8
8
555875 588
75 588
7
&'!(8
654#2658$8
8
8
8
8
8
8
!"8
8
!"8
8
8
8
%"!%"8
!"!""8
12345678
#9#4266798
)*83535396 8
67 8 59+8
83 5 8
!! "8
&'!"8
-8
.8
-8
.8
12345678+26/5798
% "8
% "8
&'!(8
!"8
!"8
%"!%"8
%""8
042 8+6) 8
49 98+96345 8
7981 3265 28
8,2,545#28
!%!- "8
!%!% "8
&'(!!8
!8
.8
"8
!"8
042 8, 23798
1 +979284*#5 8
56798
!(- -8
!((" -8
&'8
-(8
(8
8
8
042 8495798
.8
&'8
-8
8
.8
.8
!%!! "8
&'8
(8
.8
.8
.8
)*8+6)4 8
9 8, 237 8
598
042 8
569 98
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
241
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
+"6*358$"5637
46 48 8 356!7
17
1234567898
373 8
18
547856478 8
5 1234356728958 267
8958 2(7
%8&3'58 2(7
17784337
")8$8!7
)"343567117**7
63784
67
6356!7
48$3#7
$75"4"$35667
" 896#748$3#58 23!7
58 267
)"&828$67 "6"(5,#7 28-3$,#7 "6"(58*7 8 3$8*7
8
8
8
8
!8
8
8
8
8
8
8
!8
/8
8
8
/08
/8
//8
/8
123456786416 8
5#8&'27(#)#*8
4%#5#+8
!8
/8
08
8
/8
8
43 878 2345678
7(3 249 5#8
2378(7#.8
8
8
8
8
8
8
!8
28
08
08
!8
8
28
28
123456789834"3#" 8
$8%4 $8&'27 8
(#)#*8 4%# 8
5#*8%#3 5#+8
2378(74#3#8
,4" 5 $82 5#3- 8
97*8.8
( 8/8
8/8( 8//8
( 8/*8
&/*0*/+8
43 878 2345678
9824971478
&43#)147+8
2337478
0/8
//8
//8
!8
!8
сборкой; определяются по паспортным данным приспособлений, техническим
условиям на их изготовление и приемку, справочникам [1], [15], [18], [31], [40]
и др. Для некоторых приспособлений они даны в таблице 9.10; Dн — погреш
ность настройки КИП, например по эталону или установочным мерам; такая
погрешность может быть ориентировочно равна соответствующему допуску на
эталон, погрешности установочных мер, смещению уровня настройки и т. д.;
Dд — погрешность передаточных устройств КИП, которые образуются за счет
погрешности изготовления плеч рычагов, зазоров между отверстиями и осями
рычагов, погрешности от смещения точки контакта измерительного наконеч
ника при повороте рычага и т. д.; Dи — погрешность измерительного прибора
(индикатора, индикаторной головки и т. д.); определяется по паспортным дан
ным, таблицам различных справочников [18], [19], [28], [29], [40] и др.; Dм —
погрешность, связанная с методикой проведения измерений и условиями из
мерений (наличие вибраций, прерывистость измеряемых и базовых поверхно
стей, влияние трения в контакте между измерительным наконечником и кон
тролируемой поверхностью, влияние неравномерности и скорости поворота из
делия при контроле). Обычно эта величина находится в пределах 1–10 мкм.
242
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Следует заметить, что для числа погрешностей, входящих в формулу (9.3),
равных пяти и менее, допускается их арифметическое суммирование. Однако
результат такого суммирования всегда завышен.
Обратим внимание, что в формулу (9.3) могут быть включены и другие со"
ставляющие погрешности, если они выявлены при анализе измерительной си"
стемы КИП в целом и оказываются существенными. Такими могут быть: тем"
пературные деформации отдельных элементов КИП или системы в целом; де"
формации под действием усилий измерения или перепадом измерительного
усилия за цикл измерений; износ; погрешности, связанные с влиянием шеро"
ховатости и волнистости контролируемых поверхностей; субъективные погреш"
ности оператора и др.
9.3.2. ПРИМЕРЫ ПРОВЕРОЧНЫХ РАСЧЕТОВ
ТОЧНОСТИ РАЗРАБАТЫВАЕМЫХ КИП
1. Необходимо измерить радиальное бие"
ние диска (рис. 9.49). В первом приближении
для этой цели спроектируем жесткую цилинд"
рическую оправку (рис. 9.50) с буртиком (пер"
вичное приспособление). На оправку устанав"
ливается контролируемый диск и закрепляет"
ся гайкой. Оправка с диском, в свою очередь,
устанавливается в центр центрового прибора
(вторичное приспособление) (рис. 9.51).
Для определения допустимой погрешности
измерения радиального биения диска (рис.
9.49) найдем согласно таблице 9.9 величину
K = 0,3.
Рис. 9.49
Чертеж диска
Рис. 9.50
Центровая цилиндрическая оправка с гайкой для контроля радиального биения диска
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
243
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.51
Схема контроля радиального биения диска с использованием центрового прибора
и центровой цилиндрической оправки
Тогда по формуле (9.2)
[DКИП] = K × Tп = 0,3 × 30 = 9 мкм
определим отдельные составляющие погрешности такого КИП.
Погрешность базирования Dб1 диска на оправке в основном связана с зазо&
ром между отверстием диска и цилиндрической поверхностью оправки. Она
принимается равной максимальному зазору. В нашем случае:
Dб1 = Smax = T1 + T2 = 21 + 9 = 30 мкм,
где Т1 = 21 мкм — допуск диаметра отверстия диска (рис. 9.49); Т2 = 9 мкм —
допуск диаметра посадочной цилиндрической шейки оправки (рис. 9.50).
Возможна и вторая составляющая погрешности базирования. Она возника&
ет за счет отклонения от перпендикулярности базовой торцевой поверхности
изделия относительно базового отверстия. Такая погрешность вызывает пере&
кос диска. Учитывая сравнительно малую величину допуска перпендикуляр&
ности (рис. 9.49), эта погрешность незначительна.
Погрешность базирования оправки в центрах центрового прибора (рис. 9.51)
равна нулю [25], [31], т. е.
Dб2 = 0.
Погрешность закрепления изделия на оправке с помощью гайки можно
считать равной нулю, так как усилие закрепления сравнительно мало и пер&
пендикулярно направлению измерения:
Dз1 = 0.
244
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
По той же причине
Dз2 = 0.
Погрешность оправки будет непосредственно влиять на погрешность изме
рений. Это влияние связано с радиальным биением посадочной шейки оправки
относительно центровых отверстий, оно полностью переносится на результаты
измерений. Погрешность оправки принимаем равной допуску радиального бие
ния согласно чертежу оправки (рис. 9.50):
Dпр1 = 5 мкм.
Вторая составляющая погрешности оправки, связанная с отклонением от
перпендикулярности торцевой поверхности буртика относительно посадочной
шейки (рис. 9.50), вызывает перекос контролируемого диска. Однако малая
величина допуска перпендикулярности, равная 0,01 мм, практически сводит к
нулю значение такой погрешности на результаты измерений.
Погрешности изготовления центрового прибора следует найти из его пас
порта. Если такой прибор спроектирован, то соответствующую погрешность
берут из технических требований. Будем считать
Dпр2 = 4 мкм.
Настройка прибора по эталону или установочным мерам не производится,
поэтому имеем:
Dн = 0.
КИП не имеет передаточных устройств:
Dд = 0.
Для измерений воспользуемся головкой рычажнозубчатой 2ИГ (ГОСТ
1883375) с ценой деления 2 мкм [28], [31], для которой:
Dи = 2 мкм.
Погрешность, связанную с методикой проведения измерений, будем счи
тать равной
Dм = 2 мкм.
Суммарную погрешность КИП определим по формуле (9.3) с учетом (9.4)
и (9.5)
1 КИП 2 1,2 12б1 3 12пр1 3 12пр2 3 12и 3 12м 2 1,2 302 3 52 3 42 3 22 3 22 4 37 мкм.
Полученный результат значительно превышает допустимую величину по
грешности, равную 9 мкм. Очевидно, что использование рассмотренного вари
анта КИП для контроля радиального биения диска (рис. 9.49) не допустимо.
Следует заметить, что можно применить такое КИП в других случаях, напри
мер, если допуск радиального биения равен 160 мкм.
Тогда
[DКИП] = 0,25 × 160 = 40 мкм.
2. Анализ составляющих погрешности КИП позволяет сделать вывод о том,
что погрешность базирования, определяемая зазором между оправкой и дис
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
245
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.52
Схема контроля радиального биения диска с использованием центрового прибора
и центровой оправки, имеющей малую конусность
ком Dб1, преобладает среди прочих составляющих. Для исключения зазора мож
но воспользоваться различными другими видами оправок (табл. 9.10). Восполь
зуемся оправкой с малой конусностью рабочей поверхности (рис. 9.52). При
мем конусность такой оправки равной 1:1000. Погрешность базирования на
конической оправке связана с перекосом диска и зависит от положения изме
рительного наконечника в осевом направлении относительно контролируемой
поверхности. Минимальная погрешность соответствует измерениям у левого
торца (рис. 9.52), где находится больший диаметр конуса оправки. Максималь
ная погрешность измерений наблюдается, если измерительный наконечник
находится у правого торца. Если измерительный наконечник находится в сере
дине контролируемой поверхности, то погрешность базирования определим так:
1 б1 2
l
10
2
2 0,005 мм 2 5 мкм,
2К 2 3 1000
где l — ширина диска, мм; К — конусность.
Кроме того, погрешность конической оправки, связанная с радиальным
биением рабочей поверхности (рис. 9.52), будет равна:
Dпр1 = 3 мкм.
Значения остальных составляющих погрешности КИП, рассмотренных
выше, сохраняются.
Тогда
1 КИП 2 1,2 12б1 3 12пр1 3 12пр2 3 12и 3 12м 2 1,2 52 3 32 3 42 3 22 3 22 4 8,9 мкм.
Найденное значение погрешности КИП меньше предельно допустимой ве
личины. Это дает возможность использования рассмотренного варианта КИП
для контроля радиального биения диска (рис. 9.49).
246
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
3. Общим недостатком предыдущих вариантов КИП является применение
центрового прибора, который не только вызывает дополнительную погрешность
при измерениях, но и сравнительно дорог, имеет значительные габариты. Наи$
больший вклад в погрешность измерений КИП, как было установлено в п. 9.3.1,
вносит зазор между отверстием контролируемой детали и посадочной шейкой
оправки (рис. 9.51). Зазор является причиной отклонения от соосности указан$
ных поверхностей (эксцентричность). Изделие закрепляется на оправке непод$
вижно. В момент контроля они совместно вращаются. Эксцентричность, вы$
званная зазором, увеличивает погрешность измерения радиального биения,
т. е. даже при реальном отсутствии биения наружной поверхности относитель$
но отверстия диска измерением фиксируется его наличие, что и является по$
грешностью измерений.
Такую погрешность можно исключить, если контролируемое изделие уста$
навливается на оправку с зазором подвижно относительно оправки. При конт$
роле изделие вращается относительно
оправки так, чтобы зазор сохранялся
неизменным в направлении линии изме$
рения. Это обеспечивается, например,
подпружиненными шариками или суха$
рями, которые смещают изделие отно$
сительно оправки в одном направлении.
Фактически измеряется изменение тол$
щины стенки изделия (рис. 9.53).
Для контроля радиального биения с
допуском, равным 20 мкм (рис. 9.53), до$
пустимая погрешность измерения будет:
[DКИП] = К × Tп = 0,35 × 20 = 7 мкм,
где К = 0,35 (табл. 9.9).
Рис. 9.53
Схема устройства с оправкой, оснащен$
Аналогично предыдущим примерам ной
шариками, для контроля радиально$
вначале определим составляющие по$
го биения
грешности КИП (рис. 9.53).
Влияние зазора практически исключено, поэтому
Dб1 = 0.
Влияние погрешности оправки будет определяться в основном только от$
клонением от прямолинейности образующей рабочей поверхности оправки и
отклонением ее от круглости. Названные погрешности образуются при меха$
нической обработке. Будем считать, что такое влияние вызывает погрешность:
Dпр1 = 4 мкм.
Вторичное приспособление (раньше это был центровой прибор) отсутству$
ет. Соответственно нет оснований для погрешностей, связанных с ним. Такое
упрощение конструкции снижает погрешность КИП.
Как и ранее будем считать
Dи = 2 мкм; Dм = 2 мкм.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
247
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Тогда суммарная погрешность будет
1 КИП 2 1,2 12пр1 3 12и 3 12м 2 1,2 42 3 22 3 22 4 5,4 мкм.
Из этого следует, что рассмотренный вариант КИП (рис. 9.53) может быть
использован для контроля радиального биения с допуском 20 мкм.
4. В тех случаях, когда требования к точности КИП еще более высокие,
можно предложить КИП, основанное на использовании аэростатической (пнев%
матической) оправки (рис. 9.54). Оправка имеет центральное отверстие, соеди%
ненное радиальными отверстиями (ка%
налами) с рабочей цилиндрической по%
верхностью. На ней имеются кольцевые
канавки, в которые выходят радиальные
каналы. Через радиальные каналы сжа%
тый воздух, подаваемый в центральное
отверстие, выходит на рабочую поверх%
ность. За счет соединения центрального
отверстия каналами с кольцевыми ка%
навками и зазора между оправкой и из%
делием, равного 0,1–0,2 мм, давление
сжатого воздуха распределяется равно%
мерно. Это обеспечивает самоцентриро%
вание контролируемого изделия с высо%
Рис. 9.54
кой точностью относительно цилиндри%
Схема устройства с пневматической
оправкой для контроля радиального
ческой поверхности оправки. Тем самым
биения
имитируется и фактически обеспечива%
ется соосное расположение прилегающих цилиндров рабочей поверхности оп%
равки и базового отверстия изделия. Влияние точности формы этих поверхно%
стей на погрешность измерений резко уменьшается. Будем считать, что по%
грешность, вызванная аэростатической оправкой, будет равна
Dпр1 = 1,5 мкм.
Для измерений воспользуемся той же рычажно%зубчатой головкой 2ИГ
(ГОСТ 18833%75) с предельной погрешностью измерения, равной
Dи = 2 мкм.
Погрешность, связанная с методикой измерений, в этом случае будет мень%
ше за счет резкого снижения сил трения между оправкой и деталью. Она умень%
шается в связи с повышением равномерности поворота изделия на аэростатиче%
ской оправке при измерениях. Примем эту величину равной
Dм = 0,5 мкм.
Суммарная погрешность КИП будет равна
1 КИП 2 1,2 12пр1 3 12и 3 12м 2 1,2 1,52 3 22 3 0,52 4 3,1мкм.
Для измерения радиального биения с допуском 10 мкм допустимая погреш%
ность КИП будет равна
[DКИП] = К × Tп = 0,35 × 10 = 3,5 мкм,
где К = 0,35 (см. табл. 9.9).
248
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Из приведенных расчетов следует, что КИП, основанное на использовании
аэростатической оправки, может применяться для измерений радиального бие
ния с допуском 10 мкм.
9.4. РАЗРАБОТКА КОНСТРУКЦИИ
КОНТРОЛЬНОИЗМЕРИТЕЛЬНОГО
ПРИСПОСОБЛЕНИЯ
Эксплуатационные свойства КИП определяются не только пра
вильным выбором метода и принципиальной схемы измерения, но и конструк
цией приспособления в целом.
Большинство КИП предназначено для проверки точности выполнения раз
меров, формы и взаимного расположения поверхностей изделий.
Контрольные приспособления состоят из тех же элементов, что и станоч
ные, с добавлением измерительных приборов.
Принципы конструирования КИП во многом совпадают с принципами кон
струирования станочных приспособлений. Основными особенностями разра
ботки конструкции КИП по сравнению со станочными приспособлениями яв
ляются:
· более высокие требования к шероховатости и точности отдельных поверх
ностей и приспособления в целом (в 3–5 раз);
· существенно меньшие рабочие усилия, так как усилия при измерениях,
как правило, меньше усилий при резании;
· значительно меньшие требуемые усилия закрепления изделий при конт
роле.
9.4.1. ПОРЯДОК ПРОЕКТИРОВАНИЯ КИП
1. Исходные данные для проектирования:
а) значения отклонений формы и взаимного расположения поверхностей
по чертежу детали;
б) размеры и качество поверхностей, подвергающихся контролю;
в) требуемая производительность контроля;
г) габаритные размеры и вес детали.
2. Определение схемы и метода измерения.
3. Определение параметров передаточного устройства контрольного приспо
собления:
а) определение передаточного устройства;
б) выбор конструкции передающих элементов (рычаги, стержни, опоры,
фиксирующие детали).
4. Выбор измерительного устройства:
а) определение цены деления и пределов измерения;
б) выбор способа закрепления измерительного устройства в корпусе при
способления.
5. Повышение точности измерения:
а) сведение к минимуму влияния зазоров при базировании;
б) уменьшение влияния перемещений измерителя по проверяемой поверх
ности на точность измерения.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
249
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
6. Общая компоновка контрольного приспособления:
а) конструкция корпуса приспособления;
б) защитные устройства;
в) проектирование съемных элементов приспособления;
г) выбор материалов деталей приспособления.
7. Разработка технических требований.
9.4.2. ОСНОВНЫЕ КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ
И УСТРОЙСТВА КОНТРОЛЬНОИЗМЕРИТЕЛЬНЫХ
ПРИСПОСОБЛЕНИЙ
В КИП широко используются поворотные устройства, ползуны для переме(
щения измерительных элементов, механизмы для вращения измеряемых объ(
ектов, подъемные устройства, выталкиватели, передаточные устройства меж(
ду контактирующим элементом и отсчетным измерителем в виде рычагов, по(
зволяющие изменять направления линейных перемещений и увеличивать их
значения, выносить измерительные средства из зоны загрузки измеряемых
объектов, упрощать управление контрольными приспособлениями и др.
Контрольно(измерительное приспособление состоит из установочных эле(
ментов, зажимных, измерительных, передаточных и вспомогательных уст(
ройств, объединяемых, как правило, в общем корпусе [1], [12], [15], [18], [29].
УСТАНОВОЧНЫЕ ЭЛЕМЕНТЫ
1. Контролируемые детали устанавливаются базовыми плоскостями на
опоры, аналогичные приспособлениям для обработки заготовок. В целях повы(
шения износостойкости, опоры рекомендуется термически обрабатывать до
твердости HRCЭ 54–58.
Базовая поверхность изделия должна перекрывать установочную поверх(
ность опоры (рис. 9.55а), чтобы исключить неравномерный износ, который уве(
личивает погрешность установки.
Опорные поверхности приспособления снабжают канавками (рис. 9.55б).
Это улучшает очистку поверхностей от пыли и грязи, увеличивающих погреш(
ность измерения. Канавки наносят параллельными или перекрещивающими(
ся под углом 90°.
Рис. 9.55
Плоские опоры
250
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Установка по наружным цилиндри
ческим поверхностям производится в
призмы. Угол призмы a и положение
измерительного элемента (угол его на
клона к оси призмы) оказывают влия
ние на точность измерения (рис. 9.23,
табл. 9.5). Для снижения погрешности,
связанной с базированием, и уменьше
ния влияния погрешности формы ци
линдрической поверхности детали (изо
Рис. 9.56
гнутость, бочкообразность и др.) в сред
Призмы с выборкой:
ней части призмы формируют выборку
а — с фаской; б — без фаски.
глубиной 2–3 мм, оставляя базирующие
пояски на концах шириной 10–15 мм
(рис. 9.56).
Повышение износостойкости призмы может быть обеспечено оснащением
ее рабочих поверхностей твердым сплавом (рис. 9.57а). При контроле тяжелых
изделий может использоваться призма с незакаленным корпусом 1, но имею
щим закаленные цилиндрические вставки 2, которые фиксируются винтами 3
(рис. 9.57б). Для облегчения вращения детали взамен призмы могут приме
няться вращающиеся ролики (рис. 9.57в).
2. Установка на цилиндрические отверстия осуществляется на оправки или
пальцы, которые могут быть цилиндрическими гладкими или коническими
гладкими. Использование цилиндрических оправок приводит к возникнове
нию погрешности измерения изза ради
ального зазора между базовым отверсти
ем и оправкой (см. п. 9.3.2, рис. 9.51).
Если изделие имеет одно длинное отвер
стие или два соосных отверстия различ
ных диаметров, то может быть примене
на разбивка допуска на интервалы. На
рисунке 9.58 показана оправка, имею
Рис. 9.58
Ступенчатая оправка с втулкой:
щая два посадочных конца, каждый из
1 — изделие; 2 — оправка; 3 — втулка.
которых разделен на несколько поясков
Рис. 9.57
Призмы повышенной износоустойчивости:
1 — корпус; 2 — вставка; 3 — винты.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
251
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
различных диаметров. При измерениях используют пояски, обеспечивающие
установку с минимальным зазором. Это приводит к снижению погрешности
измерения, вызываемой зазором между отверстием и оправкой. Интервалы
между диаметрами ступенек принимают не менее 0,007 мм.
Чтобы уменьшить или исключить полностью влияние зазоров, используют
конические оправки (см. п. 9.3.2, рис. 9.52). При значительной длине базового
отверстия по отношению к его диаметру для повышении точности центрирова%
ния может быть использована комбинированная оправка, имеющая с одной сто%
роны центрирующий конус, а с другой — цилиндрический поясок (рис. 9.59а).
Погрешность, вызываемая перекосом, на такой оправке в два раза меньше, чем
на гладкой цилиндрической. Уменьшения перекоса и повышения точности
можно добиться применением сборной оправки с двумя конусами (рис. 9.59б).
Рис. 9.59
Оправки для изделий со значительной длиной базового отверстия:
а — комбинированная; б — сборная коническая.
Во многих случаях используют раз%
жимные оправки, обеспечивающие само%
центрирование. В качестве разжимных
элементов используют шарики (рис. 9.60),
разрезные втулки, цанги, тарельчатые
пружины, а для более точного центриро%
вания — пневматические втулки и оправ%
ки, устройства с гидропластом, гофриро%
ванными втулками и др.
Рис. 9.60
Исключить влияния зазоров на точ%
Использование шариков как разжим%
ных элементов для обеспечения
ность измерений можно, используя и дру%
самоцентрирования
гой принцип. Он заключается в том, что в
момент измерения обеспечивается непре%
рывный гарантированный контакт цилиндрических образующих базовой по%
верхности контролируемого изделия и контрольной оправки (или втулки). Для
этого применяют подпружиненные шарики (см. рис. 9.53, 9.76, 9.78, 9.84) и
сухари (рис. 9.61, 9.87).
Использование сухарей (рис. 9.61) обеспечивает более надежную работу
КИП, особенно в тех случаях, когда базовая поверхность имеет невысокую твер%
дость (цветные металлы и их сплавы и др.). Сухарь 4 имеет большую контакт%
ную поверхность и не оставляет вмятин на поверхности. От выпадения сухарь
предохраняется спиральными пружинами 3, размещенными в кольцевых вы%
точках. Усилие разжима создается гайкой, эксцентриком или пневматическим
цилиндром. Продольные пояски П1 и П2 фактически являются обратной приз%
мой. Они облегчают установку и снятие изделия.
252
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.61
Оправка с подпружиненным сухарем:
1 — контролируемое изделие; 2 — оправка; 3 — пружина; 4 — сухарь.
Кроме перечисленных схем установки, в контрольных приспособлениях
встречаются также различные сочетания поверхностей в качестве установоч
ных баз (например, плоскость и наружная цилиндрическая поверхность, плос
кость и отверстие и др.).
Важным фактором является высокая износостойкость установочных эле
ментов, которые часто изготавливаются из твердого сплава ВК8, Т15К6 или
армируются им.
ЗАЖИМНЫЕ УСТРОЙСТВА
Работа зажимного устройства контрольного приспособления несколько от
личается от работы аналогичных устройств в станочных приспособлениях. За
жим должен исключать смещение детали относительно измерительного уст
ройства и в то же время не вызывать деформации контролируемого изделия.
Если изделие занимает устойчивое положение на опорах, и усилия от измери
тельного устройства не нарушают устойчивости, то зажимные устройства мо
гут вообще отсутствовать.
Для повышения производительности контроля зажимное устройство долж
но быть быстродействующим.
В контрольных приспособлениях, как правило, применяют ручные зажим
ные устройства:
· рычажные;
· пружинные;
· винтовые;
· эксцентриковые;
· магнитные;
· комбинированные.
Находят применение и зажимные устройства с приводом, главным образом
пневмозажимы. В этом случае сжатый воздух часто используется и для приво
да вспомогательных механизмов приспособлений (подъем, поворот или вытал
кивание деталей).
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
253
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
Высокая точность современных машин обусловливается необходимостью
применения в контрольных приспособлениях измерителей высокой чувствительности. В контрольных приспособлениях используют две группы измерительных устройств: предельные и отсчетные.
В качестве измерительных элементов используются скобы, пробки, шаблоны, щупы, индикаторы, микрометры, манометры, сильфоны и т. д.
При контроле расположения в контрольных приспособлениях используются чаще всего отсчетные измерительные устройства. Обычно применяют индикаторы с рычажной или зубчатой передачей (ГОСТ 577-68). Они могут быть с
ценой деления 0,01; 0,002 и 0,001 мм. Сила прижима измерительного наконечника составляет 0,8–2 Н. По точности исполнения индикаторы выпускаются
нулевого, первого и второго классов с погрешностью показаний 0,01, 0,015 и
0,02 мм за один оборот стрелки [15], [22], [25], [29], [31].
Пневматические микрометры обеспечивают точность измерений 0,2–0,5
мкм. Они могут быть двух типов: с манометрами и с расходомерами.
ПЕРЕДАТОЧНЫЕ УСТРОЙСТВА
Передаточные устройства контрольных приспособлений служат для передачи перемещения от контактного элемента к измерительному устройству. Передаточное устройство позволяет расположить измерительные устройства в
удобном месте и защитить их от случайных повреждений в процессе контроля или хранения. При сохранении
направления перемещения используют стержни (штанги) (рис. 9.62).
Рис. 9.62
Для изменения направления лиКонструкция приспособления с использонейного
перемещения и передаточнованием подпружиненного стержня
го отношения служат рычажные или
клиновые передачи. Рычаги монтируются на цилиндрических, конических или
шаровых цапфах. Последние два вида допускают регулировку зазоров, возникающих по мере износа. Часто используют конструкцию шарнира, в котором
рычаг качается на оси, проходящей через отверстие рычага (рис. 9.63а). Более
износоустойчивы и чувствительны шарниры, оснащенные шарикоподшипниками. Наиболее высокой точностью отличаются рычажные передачи, ось которых качается в центрах (рис. 9.63в). Рычаг, качающийся на шариках (рис.
9.63г), хотя и более чувствителен за счет меньшей площади контакта, но менее
износоустойчив. Применяется также подвеска рычагов на плоских пружинах
(рис. 9.63б) толщиной 0,2–0,3 мм. В этом случае из-за отсутствия износа регулировка не нужна.
Примеры компоновки узлов рычажных передач приведены на рисунке 9.64.
Пружина подбирается из расчета создания измерительного усилия, не превышающего 3 Н. Применяются как пружины сжатия (рис. 9.64а), так и растяжения (рис. 9.64б).
Если измерительное устройство мешает установке и снятию контролируемой детали, то его снабжают специальным рычажком для отвода (рис. 9.65)
(часто этот рычажок является частью рычажной передачи) или выполняют в
виде отдельного поворотного (откидного, отводимого) узла.
254
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.63
Примеры конструкций рычажных передач в приспособлениях:
а — рычаг установлен на ось; б — рычаг установлен на плоских пружинах; в — ось рычага
установлена в центрах; г — ось рычага установлена на шариках.
Рис. 9.64
Узлы рычажных передач:
а — пружины сжатия; б — пружины растяжения.
Рис. 9.65
Схема приспособления с рычагом для
отвода измерительного устройства
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
255
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
КРЕПЛЕНИЕ ИЗМЕРИТЕЛЬНЫХ СРЕДСТВ
Крепление измерительных устройств существенно влияет на точность из)
мерений. Крепление должно быть надежным, жестким, но не должно деформи)
ровать детали измерительного устройства, например гильзу индикатора часо)
вого типа. В последнем случае гильзу вставляют в разрезную втулку, которая
находится в гнезде приспособления (рис. 9.66). Втулка деформируется винтом,
фиксируя индикатор в осевом направлении. Такой способ крепления позволя)
ет регулировать осевое положение индикатора, изменяя по необходимости натяг
измерительного стержня. Втулка может устанавливаться не только непосред)
Рис. 9.66
Крепление индикатора во втулке
Рис. 9.67
Стойки для крепления индикатора посредством клеммового зажима
256
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ственно в корпусе приспособления, но и
в отдельной стойке. Стойки для крепле
ния индикатора ориентируют ось изме
рительного стержня индикатора в тре
буемом направлении, например, гори
зонтально (рис. 9.67а), вертикально (рис.
9.67б) и др. Щадящее крепление инди
катора в последних случаях обеспечива
ется использованием клеммового зажи
ма. Для повышения универсальности при
необходимости выполнения различных
измерений используют перемещающие
ся индикаторные стойки. Такая стойка
(рис. 9.68) имеет достаточно тяжелое или
магнитное основание, обеспечивающее
устойчивость при установке на плоско
сти и перемещении по ней. Регулируе
мый узел крепления индикатора позво
ляет изменять его расположение по вы
соте и вылету.
ВСПОМОГАТЕЛЬНЫЕ УСТРОЙСТВА
Данные устройства в контрольных
приспособлениях имеют различное на
значение. В контрольных приспособле
Рис. 9.68
ниях для проверки радиального или осе
Стойка индикаторная универсальная
вого биения применяют поворотные уст
ройства; для проверки прямолинейности и параллельности — ползуны для
перемещения измерительных элементов; для контроля соосности ступеней тел
вращения — приводы вращения; для установки и снятия деталей — подъемни
ки и выталкиватели. Все эти устройства по конструкции аналогичны устройст
вам станочных приспособлений.
КОРПУС КОНТРОЛЬНОГО ПРИСПОСОБЛЕНИЯ
В корпусе (или на основании) контрольного приспособления размещают все
устройства и элементы. Корпус (или основание) должны быть жесткими, пол
ностью исключать возможность деформации при измерении деталей, иметь до
статочную твердость и износостойкость рабочих или монтажных поверхностей,
соответствовать правилам безопасности и технической эстетики.
Корпусы контрольных приспособлений и контрольные плиты изготавлива
ют из серого чугуна СЧ10, СЧ15, СЧ25 и СЧ30.
9.4.3. ЦЕНТРОВЫЕ ПРИСПОСОБЛЕНИЯ
Центровые приспособления находят наиболее широкое распространение для
контроля радиального и торцового биения валов и других изделий, например
устанавливаемых на оправках [2], [5]. Они реализуют различные схемы конт
роля в центрах (см., например, рисунки 9.51 и 9.52). Ось центров таких КИП
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
257
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
обычно горизонтальна или вертикальна. Приспособления имеют две бабки. Они
устанавливаются на базовой плите. Бабки, как правило, имеют шпонки или дру
гие направляющие элементы, обеспечивающие их ориентацию на плите. Для
упрощения конструкции в отдельных случаях одна из бабок может являться
Рис. 9.69
Рис. 9.70
Неподвижная бабка с неподвижным
центром и цилиндрическим гнездом
под центр
Перемещаемая бабка с неподвижным
центром и гнездом с конусом Морзе
Рис. 9.71
Перемещаемая бабка с подвижным несменяемым центром,
который подводится пружиной, отводится рукояткой
258
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
неподвижной (рис. 9.69) или перемещаемой с неподвижным центром (рис. 9.70).
При проектировании центрового прибора хотя бы одну из бабок выполняют
перемещающейся (рис. 9.70, 9.71). Предпочтительно иметь бабки со сменны
ми центрами (рис. 9.70, 9.72).
Рис. 9.72
Перемещаемая бабка с подвижным сменным центром,
который подводится пружиной, отводится рукояткой
9.4.4. ПРИМЕРЫ
КОНТРОЛЬНОИЗМЕРИТЕЛЬНЫХ ПРИСПОСОБЛЕНИЙ
ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ СООСНОСТИ
И РАДИАЛЬНОГО БИЕНИЯ
Рассмотрим примеры КИП [1], [5], [8], [10], [18], [29].
Отклонение от соосности — наибольшее расстояние D между осью рас
сматриваемой поверхности вращения и осью базовой поверхности на длине нор
мируемого участка.
Радиальное биение — разность D наибольшего и наименьшего расстояний от
точек реального профиля поверхности вращения до базовой оси (оси базовой по
верхности или общей оси) в сечении плоскостью, перпендикулярной базовой оси.
Радиальное биение является результатом совместного проявления отклоне
ния от круглости профиля рассматриваемого сечения и отклонения его центра
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
259
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
относительно базовой оси (часто отклонения от соосности). Если отклонение от
круглости сравнительно мало, то радиальное биение равно удвоенной величине
соосности. По этим причинам приспособления для контроля отклонений от
соосности конструктивно, как правило, аналогичны приспособлениям для конт
роля радиального биения.
Согласно схемам, приведенным на рисунке 9.73, величина отклонения от
соосности D определяется как половина разности отсчетов по максимальному и
минимальному отклонениям индикатора. При контроле соосности отверстий
(рис. 9.73б) в них вводятся оправки, одна из которых оснащена индикаторной
головкой. При повороте этой оправки на один оборот показания индикаторной
головки будут равны удвоенной величине соосности.
Отклонение от соосности относительно базовой поверхности может быть
определено измерением радиального биения проверяемой поверхности в опре
деленном сечении или в крайних сечениях (рис. 9.74). Приспособление имеет
прямоугольную плиту 7 из комплекта универсальносборных приспособлений
(УСП) средней серии с пазом 12 мм. На плите закреплены: стойка 4 для уста
новки контролируемого изделия и стойка 1 для измерительной головки 3.
Контролируемое изделие устанавливается на оправку 5, которая запрессована
в корпус стойки 4, с базированием по центральному отверстию. Головка 3 с
удлиненной Гобразной рычажной системой закрепляется в кронштейне 2 на
стойке 1 с помощью винта 6. Такая рычажная система предохраняет головку 3
от случайных ударов и преждевременного износа. Стойка 1 установлена в опо
ре 8 с возможностью выдвижения. Последняя крепится к плите 7 винтами 9 и
гайками 10.
Измеряется радиальное биение поверхности Г относительно поверхности В
при повороте изделия на одиндва оборота. По разности показаний головки 3
определяют радиальное биение. При этом считаем, что оно соответствует удво
енному отклонению от соосности (при малых значениях отклонения от кругло
сти). В нашем случае (рис. 9.74) допуск соосности указан в диаметральном вы
ражении, представляющем удвоенное наибольшее значение отклонения от со
осности. Поэтому радиальное биение годных изделий не должно превышать
допуска соосности в диаметральном выражении, т. е. 0,05 мм.
Рис. 9.73
Схемы приспособлений для измерения отклонения от соосности:
а — наружных цилиндрических поверхностей; б — внутренних цилиндрических поверхностей.
260
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.74
Приспособление для контроля отклонения от соосности:
1, 4 — стойки; 2 — кронштейн; 3 — измерительные головки; 5 — оправка; 6, 9 — винты; 7 —
плита; 8 — опора; 10 — гайка.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
261
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.75
Приспособление для контроля отклонения от соосности отверстий и отклонения от
перпендикулярности отверстия относительно торца:
1, 9 — пружины; 2 — кронштейн; 3, 22 — измерительные головки; 4 — планка; 5, 7, 14, 15,
17 — винты; 6 — рычаг; 8 — измерительный щуп; 10 — палец; 11 — ось; 12 — втулка; 13 —
стойка; 16 — шайба; 18 — гайка; 19 — упор; 20 — оправка; 21 — корпус.
262
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Необходимо отметить также, что для максимально возможного снижения
влияния зазора между оправкой и базовым отверстием на точность измере
ний следует использовать подпружиненные шарики (рис. 9.53) или сухари
(рис. 9.61).
Ряд преимуществ имеют контрольные приспособления, имеющие наклон
ное положение изделия при измерении отклонения от соосности отверстий, а
также отклонения от перпендикулярности отверстия относительно торца (рис.
9.75). Диск базовым торцом устанавливают на наклонное под углом 15° к гори
зонтальной плоскости основание корпуса 21. На основании смонтирована оп
равка 20 с помощью винтов 14, на гранях верхнего бортика которой установле
ны упоры 19, зафиксированные гайками 18. Благодаря наклонному корпусу
диск под собственным весом перемещается до соприкосновения с упорами.
В корпусе приспособления на стойке 13 через втулку 12 закреплена измери
тельная головка 22 с рычажной передачей, в которую входят: щуп 8 с пружи
ной 9 и пальцем 10, равноплечий рычаг 6, ось рычага 11, винт 5 с планкой 4 на
оправке. Нижнее плечо рычага 6 соприкасается с измерительным стержнем
головки 22.
При вращении диска измеряется отклонение от соосности отверстий диа
метром 210 и 160 мм. Перемещение передается через измерительный щуп 8 на
рычаг 6. Последний будет поворачиваться на оси 11 и величина перемещения
нижнего плеча рычага определяется головкой 22. Фиксируется удвоенная ве
личина отклонения от соосности отверстий за один оборот диска.
Отклонение от перпендикулярности цилиндрической поверхности диамет
ром 160 мм относительно торца проверяют измерительной головкой 3, которая
закреплена в кронштейне 2 с помощью винта 15 через шайбу 16. Кронштейн
смонтирован стационарно на оправке 20 с помощью винтов 17. При вращении
диска головка 3 покажет удвоенную величину отклонения от перпендикуляр
ности образующей отверстия Æ160 к базовому торцу за один оборот диска. Ко
нусность отверстия не вносит погрешности в результаты измерений.
Наиболее простое приспособление для контроля радиального биения пред
ставлено на рисунке 9.76. Изделие надевается на оправку, снабженную под
пружиненным шариком. Как уже отмечалось выше, это снижает влияние зазо
ра между оправкой и отверстием на погрешность измерения.
Рис. 9.76
КИП для контроля радиального биения непосредственно индикаторной головкой:
1 — контролируемая деталь; 2 — оправка; 3 — индикаторная головка; 4 — основание.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
263
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приспособление, изображенное на рисунке 9.77, позволяет контролировать
биение наружных и внутренних поверхностей, включая проточку, относитель
но базового отверстия. В ряде конструкций изделий требования к радиальному
биению или соосности проточек весьма жесткие. Втулку 2 устанавливают базо
вым отверстием А на оправку 5, ось которой расположена в горизонтальной
плоскости, и закреплена на основании 3 приспособления. На основании также
смонтирована стойка 1 с помощью специального шарнира 4, который позво
ляет перед выводом щупа рычажной передачи 6 измерительной головки 7 из
контролируемой зоны приподнять его.
Для проверки биения выточки втулка поворачивается на одиндва оборота
и определяется разность в показаниях головки 7. Специальная рычажная пе
редача 6 предохраняет головку 7 от ударов, преждевременного износа и позво
ляет измерить биение удаленной поверхности.
Контроль радиального биения цилиндрического пояска относительно резь
бовой поверхности выполняется приспособлением, представленным на рисун
ке 9.78.
Резьбовая оправка 10 ввинчивается в отверстие изделия 5. Измерительный
наконечник рычага 8 взаимодействует с контролируемым пояском. При пово
роте корпуса 11 с закрепленным индикатором 1 вокруг оси оправки 10 на один
два оборота считываются разность показаний индикатора. За счет соотноше
ния плеч рычага 8, равного 3, предельные значения показаний индикатора
годных изделий по сравнению с допуском биения увеличиваются в 3 раза и
составят 0,15 мм. Погрешность измерения снижается за счет уменьшения влия
ния зазора между поверхностями трения оправки 10 и корпуса 11 при их отно
сительном вращении посредством подпружиненного шарика 4.
Подобная конструкция приспособления может быть использована для кон
троля биения наружной резьбовой поверхности относительно наружной или
внутренней цилиндрической поверхности.
Контрольное приспособление для проверки радиального биения отверстия
гильзы относительно ее поясков приведено на рисунке 9.79.
Отверстия гильз обрабатывают с точностью IT7–8, реже IT6. Гильзы за
прессовывают в корпус по пояскам, которые обрабатывают с точностью IT6–7.
Допуск радиального биения отверстия относительно поясков обычно находит
ся в пределах 0,03–0,08 мм.
Проверяемая гильза поясками базируется на ролики 2, установленные на
осях 4, которые монтируются в корпусах 5, закрепляемых на плите 6. Упор 7
позволяет избежать осевого перемещения при вращении гильзы.
Радиальное биение отверстия относительно поясков определяется по разно
сти показаний индикатора при одномдвух оборотах гильзы. Индикатор закре
пляется на индикаторной стойке 3 с магнитным основанием (тип ШМIIH, ГОСТ
1019770), который устанавливается на специальной площадке 8, 9 плиты 6.
Следует заметить, что радиальное биение, измеренное таким способом, пред
ставляет собой разнотолщинность стенок гильзы.
264
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.77
Приспособление для контроля радиального биения, в том числе проточки:
1 — стойка; 2 — втулка; 3 — основание; 4 — шарнир; 5 — оправка; 6 — рычажная пе
редача; 7 — измерительная головка.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
265
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.78
Приспособление для контроля радиального биения цилиндрического пояска относительно
резьбовой поверхности (показание индикатора увеличено за счет рычага):
1 — индикатор часового типа; 2 — шарик; 3 — винт; 4 — пружина; 5 — контролируемая деталь; 6 —
стойка крепления индикаторной головки; 7 — пружина; 8 — рычаг; 9 — ось рычага; 10 — оправка
резьбовая; 11 — корпус.
266
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.79
Приспособление для контроля радиального биения отверстия в гильзе:
1 — измерительная головка; 2 — ролик; 3 — индикаторная стойка; 4 — ось; 5 — корпус; 6 —
плита; 7 — упор; 8, 9 — площадка.
9.4.5. ПРИМЕРЫ
КОНТРОЛЬНОИЗМЕРИТЕЛЬНЫХ ПРИСПОСОБЛЕНИЙ
ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ
ОТ ПЕРПЕНДИКУЛЯРНОСТИ И ТОРЦОВОГО БИЕНИЯ
Рассмотрим примеры КИП [1], [10], [16].
Отклонение от перпендикулярности плоскостей — отклонение угла ме
жду плоскостями от прямого угла, выраженное в линейных единицах D на
длине нормируемого участка.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
267
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Отклонение от перпендикулярности плоскости или оси относительно
оси — отклонение угла между плоскостью или осью и базовой осью от прямого
угла, выраженное в линейных единицах D на длине нормируемого участка.
Торцовое биение — разность D наибольшего и наименьшего расстояний от
точек реального профиля торцовой поверхности до плоскости, перпендикуляр!
ной к базовой оси.
Отклонение от перпендикулярности плоскостей может быть измерено при!
способлением, схема которого приведена на рисунке 9.80. До начала измере!
ний индикатор настраивается на ноль по эталону. Корпус 3 устройства вместе с
закрепленным индикатором 2 перемещает!
ся в нормальном по отношению к контроли!
руемой плоскости направлении до контакта
с ней упора 4. Считывается показание инди!
катора 2. Так как допуск перпендикулярно!
сти задан на всей длине L плоскости, конт!
ролируемого изделия, а измерения выпол!
няются только на длине L1, то предельно
допустимая величина показаний индикатор!
ной головки для годных заготовок не долж!
Рис. 9.80
на превышать значения:
Схема приспособления для измере!
ния отклонения от перпендикуляр!
ности плоскостей:
T¢ = T × L1/L = 0,05 × L1/L, мм.
Пример устройства для контроля откло!
нения от перпендикулярности торца втул!
ки 4 относительно оси ее отверстия приве!
ден на рисунке 9.81. Корпус 2 устройства посредством резьбового хвостовика
установлен на диск 5. Для выполнения измерений рычаг 3 вводится в отвер!
стие контролируемой детали 4. При этом торец диска 5, на котором установлен
корпус, контактирует с торцом контролируемого изделия. Вручную устройст!
во перемещается в радиальном по отношению к отверстию втулки направлении
до упора так, чтобы плоскость поворота рычага 3 была перпендикулярна по!
верхности контролируемого отверстия. Рычаг 3, поворачиваясь относительно
оси, при этом займет положение, предопределяемое положением образующей
отверстия втулки 4 относительно ее торца. Фиксируются показания индика!
торной головки 1. Измерения таким устройством производятся многократно,
поворачивая устройство вокруг оси отверстия. При определении отклонения от
перпендикулярности принимают во внимание максимальное показание инди!
каторной головки. При конструировании КИП следует стремиться обеспечить
наибольшее расстояние между контактными поверхностями измерительного
рычага 3, что повышает объективность измерений.
При измерении отклонения от перпендикулярности по схеме, приведенной
на рисунке 9.81, надо учитывать, на какой длине задано отклонение и переда!
точное отношение реализуемой схемы измерения.
Исходя из заданных размеров и условий чертежа, получим допустимое от!
клонение годной детали:
60 30
12
3
3 0,03 2 1,5 3 0,03 2 0,045 мм.
30 40
1 — контролируемое изделие; 2 — инди!
катор часового типа; 3 — корпус приспо!
собления; 4 — упор.
268
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.81
КИП для контроля отклонения от перпендикулярности торца втулки относительно
отверстия:
1 — индикаторная головка; 2 — корпус; 3 — измерительный элемент (рычаг); 4 — контролируемая
деталь (втулка); 5 — диск.
До начала измерений индикаторная головка настраивается на ноль, исполь
зуя эталон. При сравнительно больших диаметрах отверстий контролируемых
изделий индикаторная головка может располагаться внутри их. Рассмотрим
подобный пример для корпусной детали (рис. 9.82).
К торцам корпусных деталей крепятся крышки, картеры, через отверстия
которых проходят концы валов, крышки с гнездами под подшипники и др.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
269
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.82
Приспособление для контроля отклоне
ния от перпендикулярности оси отвер
стия к торцу:
1 — основание; 2 — стойка; 3 — упор; 4 — из
мерительная головка; 5 — рукоятка.
Для точной их установки необходимо
обеспечить перпендикулярность этих
торцов относительно оси отверстия для
подшипников. Как правило, допуск от
клонения от перпендикулярности оси
отверстия к торцу находится в преде
лах 0,05–0,10 мм на длине 100 мм.
Основание 1 (рис. 9.82) устанавли
вают на измеряемом торце корпуса та
ким образом, чтобы стойка 2, жестко за
крепленная на основании и несущая
упор 3 и измерительную головку 4, вош
ла в контролируемое отверстие корпу
са. Для удобства измерений основание
снабжено рукоятками 5. Измеритель
ный стержень головки 4 расположен на
расстоянии L1 от упора 3. На этой дли
не определяется отклонение от перпен
дикулярности образующей отверстия к
торцу корпуса. Если требования касают
ся всей длины отверстия, как на схеме
измерения (рис. 9.82), то следует, на
пример, уточнить допуск перпендику
лярности, умножив его значение на ве
личину отношения L1/L.
При измерениях КИП перемещают
до соприкосновения упора 3 и измери
тельного стержня головки 4 с образую
щей отверстия так, чтобы стержень рас
полагался перпендикулярно цилиндри
ческой поверхности.
Измерения повторяются, поворачи
вая всякий раз КИП вокруг оси. Мак
симальное значение из ряда измерений
принимают за величину отклонения от
перпендикулярности оси отверстия к
торцу. Как и в предыдущем случае, из
мерительная головка 4 должна быть на
строена по эталону.
Отклонение от перпендикулярности
осей отверстий может быть измерено
приспособлением по схеме, приведен
ной на рисунке 9.83.
Рис. 9.83
Схема КИП для измерения отклонения от перпен
дикулярности отверстий в корпусной детали
270
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
В контролируемые отверстия встав
ляют гладкие цилиндрические оправки.
Одна из оправок оснащена индикатором
часового типа и упором на торце. При
использовании однократного измерения
необходимо выполнять настройку инди
катора на ноль по эталону. Настройку
можно исключить, если выполнить из
мерения дважды, повернув после пер
вого измерения оправку с индикатором
на 180°. Результатом измерения в по
следнем случае будет половина разно
сти показаний индикатора. Как и для
приспособлений на рисунках 9.80–9.82,
для оценки годности изделия необходим
пересчет показаний индикатора, прини
мая во внимание длину контролируемо
го отверстия и расстояние между нако
нечником индикатора и упором, а так
же допуск перпендикулярности.
Значительно повышается точность
измерений отклонений от перпендику
лярности при использовании оправок
Рис. 9.84
Схема конструкции приспособления для
с подпружиненными шариками (рис.
контроля отклонения от перпендикуляр
9.84). Изделие базовым отверстием A
ности отверстий с использованием
подпружиненных шариков:
одевается на оправку. В контролируе
1 — индикатор часового типа; 2 — оправка;
мое отверстие вставляется вторая оправ
3 — корпус; 4 — контролируемое изделие; 5 —
ка. Подпружиненные шарики в обеих
основание.
оправках обеспечивают прилегание оп
равок к образующим отверстий, что позволяет практически исключить влияние
зазоров между оправками и отверстиями на точность измерения. По эталонной
детали настраивают оба индикатора на ноль. При измерениях считываются
показания обоих индикаторов, разность показаний которых дает представле
ние об отклонении от перпендикулярности. Так как допуск перпендикулярно
сти задан на базовой длине, а измерения выполняются на длине, то следует
скорректировать предельные показания индикатора, соответствующие годным
изделиям. Согласно рисунку 9.84 показания индикатора завышаются. Поэтому
предельно допустимые показания будут больше на величину отношения L1/L.
Приспособления для контроля торцевого биения и отклонения от перпен
дикулярности могут быть выполнены по трем основным схемам: с централь
ным упором (рис. 9.85а) и с упором, вынесенным на радиус расположения ин
дикаторного стержня (рис. 9.85б,в). В первом случае значение торцевого бие
ния D определяется как разность между наибольшим и наименьшим отсчетами
по шкале индикатора, а во втором — как половина этой разности.
Для контроля биения торца изделия относительно центрального кониче
ского отверстия можно использовать приспособление, приведенное на рисун
ке 9.86. Контролируемый диск устанавливается на закрепленную на основа
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
271
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Рис. 9.85
Схемы приспособлений для контроля
торцевого биения и отклонения от
перпендикулярности
Рис. 9.86
КИП для контроля торцевого биения
дисков с коническим отверстием:
1 — корпус; 2 — опора; 3 — гайка; 4 — из"
мерительная головка; 5 — разрезная втул"
ка; 6 — ось; 7 — оправка; 8 — основание.
нии 8 оправку 7 с конической поверхностью. В центральное отверстие оправки
устанавливается с минимальным зазором ось 6, что может быть обеспечено,
например, притиркой. Это необходимо для минимизации погрешности измере"
ний, вызываемых зазором. На оси 6 неподвижно установлен корпус 1 в виде
диска, который крепится к ней гайкой 3. На корпусе смонтирована точечная
опора 2 и измерительная головка 4 с помощью разрезной втулки 5.
При измерении торцового биения корпусу 1 придается один"два оборота.
По разности показаний головки 4 определяется биение торца диска относи"
тельно оси конического отверстия.
Биение торца относительно оси цилиндрического отверстия можно изме"
рить, используя конструкцию приспособления, представленную на рисун"
ке 9.87. В отверстие изделия вставляется оправка 2 с опорами, параллельными
образующей, которые играют роль обратных призм. При вращении гайки 4
натяжного винта сближаются скосы винта и втулки, что вызывает смещение
шариков, а вместе с ними и сухаря 5 в радиальном направлении. С поверхно"
стью отверстия контактируют опоры оправки и сухарь. Зазор исключается.
Поворачивая корпус 3 с закрепленным индикатором 1 вокруг оси оправки 2,
фиксируются предельные показания индикаторной головки, что и представля"
ет собой численное значение торцового биения.
272
Powered by TCPDF (www.tcpdf.org)
Глава 9
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
На рисунке 9.88 представлена схема при
способления для контроля как торцевого, так
и радиального биения. Оправка 4 вместе со
смонтированными на ней втулками и тарельча
тыми пружинами вводится в отверстие изде
лия. Завинчивая гайку 6, тарельчатые пружи
ны, сжимаясь в осевом направлении, увеличи
ваются в диаметральном, исключая тем самым
зазор между ними и поверхностью отверстия
изделия. Кронштейн 2 поворачивается вокруг
оси оправки 4. Индикаторной головкой 1, кон
тактирующей с торцовой поверхностью, изме
ряется торцовое биение. Индикаторная голов
ка 5 измеряет радиальное биение.
7
Рис. 9.87
Приспособление для контроля торцевого
биения с использованием сухаря в качест
ве разжимного элемента:
1 — индикаторная головка; 2 — оправка; 3 —
корпус; 4 — гайка натяжного винта; 5 — сухарь.
Рис. 9.88
Приспособление для контроля торцевого и
радиального биения с использованием для
ликвидации зазора тарельчатых пружин:
7
1, 5 — индикаторная головка; 2 — кронштейн;
3 — рукоятка приспособления; 4 — оправка; 6 —
гайка; 7 — контролируемое изделие.
Приспособления для контроля точности деталей
Powered by TCPDF (www.tcpdf.org)
273
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Powered by TCPDF (www.tcpdf.org)
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ПРИЛОЖЕНИЯ
Powered by TCPDF (www.tcpdf.org)
.
276
Powered by TCPDF (www.tcpdf.org)
"83 #$9
29
"83 #$9
28
24346983#$9
1199
.#37(9
3854/2*9
2 9
&2 9
5237 3762*9
1199
&2 9
'7634'(9
)7662*9
92 6789
89
19+99,-29
"83 #$9
29
!3!3358
"35638
35638
625238
9
9
9
0276678978689
123456789 37 7 6789
9 7 838678978689
93222689
123456789 37 7 6789
9 7 838678978689
93222689
1238 268938 %#9
9
9
9
38 26899 3738 2689
6789
9
123456789 37 7 6789
9 7 838678978689
93222689
123456789 37 7
78689
9
1238 268938 %#9
9
9
6789
9
258
38 26899 3738 2689
123456789 37 7
78689
123456789 37 7 6789
9 7 838678978689
93222689
#68 !3! 968
453
9
11 8
9
9
9
9
9
9
9
!9
9
9
9
9
9
9
9
9
9 9
9 9
9
35 8
9
9
9
9
9
9
9
9
9
9
553
!9
9
9
!9
!9
!9
9
!9
9
9
9
253
123
9
9
453
!9
9
9
!9
!9
!9
9
!9
!9
9
9
!9
!9
!9
9
!9
9 9
9
9
353
6 652868 933568552688
1234526789
6 652 868 933558552688 58
78 37686853267868 4526688
!9
9
9
!9
!9
!9
9
!9
9
9
553
!9
9
9
!9
!9
!9
9
!9
!9
9
9
253
14
1
453
!9
9
9
!9
!9
!9
9
!9
!9
!9
9
9
!9
!9
!9
9
!9
!9
9 9
9 9
353
3878 3758
!9
9
9
!9
!9
!9
9
!9
!9
9
553
1 2 3 4 5 6 2 7 89 7
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приложения
.
Приложения
Powered by TCPDF (www.tcpdf.org)
9685
8725
65
'&78(9 5
6&5
1232456789 5
55
123245%&% 5
55
-./4 5
562/45
9685
8725
65
9685
,7(49756&9 5
8725
5*5
65
975
589789
9 7 975
5
5
$5
5
"5
874755887475
824758(475
5787)475)7475
586)&475
824758(475
5787)475)7475
586)&475
5
5
5
5
#5
5
5
5
5
35
5
5
25
11
5
"5
5
++5
5
"5
"5
5
453
12344565789
824758(475
5787)475)7475
586)&475
874755887475
5 229 5
5
5
5
5
5
5
5
5
553
!5
!5
!5
!5
!5
# 5
#$5
!5
253
!5
453
!5
!5
!5
!5
!5
!5
!5
!5
!5
!5
5 "5
5 "5
!5
353
123
!5
!5
!5
!5
!5
5
5
!5
553
!5
!5
!5
!5
!5
#5
$ 5
!5
253
1
!5
453
!5
!5
!5
!5
!5
!5
!5
!5
!5
!5
*5 +5
5 #5
!5
353
14
5 2 975 97 785 42 297
12343567897
!5
!5
!5
!5
!5
5
5
!5
553
5 1
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
277
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
1234562789 2 89 7965 68 2 47 3545 426
4 75 84 85 85 256 9 4 58
34 2452 5 785
1545 49
85 82658
1234562789
6 785
!5 45
4 75
84 85
22857 8
123
893
23
3 3
23
33
3315323
Kϕ p 3
123
893
23
6 785
2 85
256 11
12
13
45263
45123
25763
45223
45223
45223
25 83
25773
45443
256 3
25923
45473
45263
45 13
25723
45223
45223
45223
25 63
25743
4573
23
45263
25883
4563
#493
4593
5223
5223
23
$%3
335323
!3
"3
2 89
3 3
Kγ p 3
423
4#493
2#93
!3
"3
45423
45823
45823
45223
45223
45223
45493
45 23
45723
45223
45223
45223
25793
45723
45223
45223
4593
25693
45723
25 93
#93
&3'3
3
( %!345323
23
93
Kλ p 3
3 3
4523
493
)%3
%3 *%3 53
++3
2593
25673
25 93
4523
25 13
2563
45223
45223
45283
45483
45423
45113
523
1523
!3
"3
Krp 3
9523
45223
1 2 3 4 5 6 2 7 89 7
1234562789
2 8 KM p 34 24559652 545 7965
68 587 62 6 284 2889 5 5822 422 26 22 785 85 9 458
!5 284 2885
582 σ
(750
)
np
KM p =
278
Powered by TCPDF (www.tcpdf.org)
в
8
49
KMp 3
26 НВ
1190
2
np
KM p 3
НВ
1150
2
np
Приложения
.
Приложения
Powered by TCPDF (www.tcpdf.org)
1 2 3 4 5 6 2 7 89 7
(649"
#$ ) %&'
32564
1234
3276832534
!68269
34 282682
42882 4 4
68269
24*58 685
+ %', 34 282682
22882 4 4
1298 2 4
22889
2 8 KM p 89 35626
1258 214
./
32 6832 64
! 24*58
685
) %0,
1234
18
8
1264
11 2 &0' .15
234
11 2 30' .15
458
2964
11 2 4'' .15
2 8 KM p 5869 35626
2 8 KM p , 7965 68 5765 89 5869 35626 85 458
!48
642"
#$ %&'
42889
1234562789
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
279
.
280
Powered by TCPDF (www.tcpdf.org)
9 98
9 8
158 !443"#8
998
98
98
98
8
98
998
998
417
8
8
8
9 8
9 $98
9 $98
9 $98
8
517
9 8
9 8
9 8
9 8
9 8
9 8
9 98
8
617
-
8
8
8
8
- 98
8
8
98
32 7
98
8
98
8
8
8
8
998
4 27
8
8
8
8
98
98
98
8
52 7
9537637227
6 652 7679833 567 55267
9 8
9 8
9 8
9 -8
9 8
9 98
9 98
9 98
627
1 2 3 4 5 6 2 7 89 7
8 5 25 98&766!38%824353832!3875!8%478234536778+3,27356!8+58234588%+&366,8%3433!&,485368%+&7
7883287582643828 84648
1234536738
3+6!38%52!8/334/366!38
43+63,8234+7 8018991-98
9 8
9 8
9 8
98
9 9$8
8
*234+!,8%528
158 !443"#8
2345726738
317
99
9
8 67952 7117
158 !443"#8
*234+!,8%528
1234536738
1234536738
158 !443"#8
158 !443"#8
!3 5637
5"5743 67
62 52 37
1234536738
2345726738
1234536738
3652932657
6753267
6 652 97679833 557 552677 9378 597952 3767959767
675526676735632667
./6827, 8018 98
./6834!, 8018$98
158"4%4&6 8'$($)8
158647668
785638573 81288 988
33 357
3 5637
12345265789
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приложения
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
12344565789
5 2 975 97 785 427 5
975
772 589789
5 47
12 5 4772855
12344565789 5 2 975 97 785
31
41
51
61
11
71
1289 65288 7259 9 7259 9 2 !" #
123456789
1432638
28
69443 89
!54 "39# 38
123456789
28
69443 89
123456789
%!32638
123456789
( 9!!638
8
8
28
69443 89
& 9#2638
443'!638
843'!638
8
8
28
69443 89
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
8
$ 8
$8
8
8
8
$8
8
8
8
8
8
8
$ 8
$8
8
8
8
8
$8
8
8
8
8
8
$ 8
$8
8
8
8
$8
)8
)8
)8
)8
)8
)8
8
8
8
$2 2%8 7 95 &'()* +), '-'.
1432638
123456789
28
%!32638
69443 389
8
8
8
8
8
8
$8
/7 0 %8 ), '*"
1432638
!54 "39# 38
!54 "39# 38
#!326385 9#*8
2638 443'!638
123456789
28
69443 89
8
)8
8
)8
8
8
$8
8
8
8
8
8
8
8
8
$8
8
8
8
12 50 %8 ), '!"
1432638
123456789
28
!54 "39# 38
#!326385 9#*8
2638 443'!638
43'!638
69443 89
8
)8
8
8
8
8
8
8
$8
8
8
8
$8
8
$8
12229 7972788 3 78 3 2 ), '""4'-"
!54 "39# 38
#!326385 9#*8
2638 443'!638
43'!638
69443 89
8
$8
$8
8
8
8 5 25+8,#4!-89 88 4 8.43'342 ! 8 -/ ! 326089
2284 99" 6*
2 8 # #8 5 8 9
8 98 22353! 3/8 #1.. 3! 8 +8 24 8 '!938 .43'8 58 23 " !68 8//8
#4! 89
882'4 9 338 4 844 4#38/5#789
867889:828984 ' ;8 4 8
44 4#389
89435!37823459 8 823457867889:8 8"5! 8289)84 ' +8
Приложения
Powered by TCPDF (www.tcpdf.org)
281
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
123456789
28957
32 827
7 495473244772477523 8474 5247887
927
3234527
2 4!997
297277
28957
32 827
"5732 897
5 44478295227
927
3234527
2 4!997
297277
"5732 897 47 59 25947
4 52 4247 49547
12314
5657256354
5684
12314
56592565 4
5694
312854
5635256384
5614
312854
565 2565 4
56 4
852114
5638256374
3654
852114
565 256574
56 4
112 54
5637256914
3654
112 54
5657256394
5674
4 54
5691256 54
3684
4 54
5639256374
3634
1 2 3 4 5 6 2 7 89 7
1232456378574795236
25 9379
9
37 9
659119
636226 9
937919
12
3415634172
15361882
82
3457634792
88365932
52
34 3614 32
5836
6 7 729212
86987 79 982579
937 99
842669
54 676982 9
7265329 254799
! 476937 9
34182
32
2
1483684 32
36 332
92
84 36 4 32
33613332
2
4 36 4932
1333618332
2
4936134 32
183361 332
2
134 361 4 32
1 3361 332
72
1 4 36174332
1 33617332
132
1743368 4332
1733681332
112
8 4336534332
813368 332
182
534365 4332
341 2
8 3368 332
"73476937 9
282
Powered by TCPDF (www.tcpdf.org)
152
514 36574332
8 93651932
1 2
574336
4332
519365 932
192
43369 4332
5 9365 332
1 2
9 4336 94932
5 336 1332
1 2
94936 94332
1 2
94336
172
43361334332
93693932
832
13343361154332
9393695932
812
115433618 4332
959369 932
882
18 43361 14332
9 936 3332
852
1 1433619 4332
3336 5332
8 2
19 43361 54332
5336
4332
1336
332
336
932
34892
332
Приложения
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89 7
1234526782592
869
1
2
11
21
52 9 34
12
2 9 86 55
32
5
6
7
8
71
424
4 2 2
32 869
12
32
142
52
132
62
78972
72
112
112
78 2
1872
78 2
1 2
2
52
2
112
142
62
78972
72
192
132
78 2
1872
78 2
1 2
2
172
52
192
2
62
78972
72
162
142
7832
1892
78 2
142
32
172
2
192
52
172 78592
72
2
162
7832
1892
78 2
142
92
192
52
72
2
172 78592
72
42
32
7832
1892
78 2
142
2
72
3 2
92
52
172 78592
192
2
62
7892
872
78 2
32
52
92
352
72
3 2
172 78592
192
42
32
7892
872
78 2
32
42
72
9 2
92
352
172 78592
192
3 2
62
7892
872
78 2
32
62
92
952
372
9 2
172 78592
192
342
332
7892
872
78 2
32
172
372
2
392
952
172 78592
192
9 2
362
7892
872
78 2
32
112
392
52
972
2
172 78592
192
942
932
7892
872
78 2
32
1 2
972
572
92
52
172 78592
1 2
2
942
7892
872
78 2
72
432 869
1 2
3 2
592
972
572
1 2
1872
1 2
2
952
7892
872 78 92
72
132
972
472
992
592
1 2
1872
1 2
42
2
7892
872 78 92
72
192
992
492
72
472
1 2
1872
1 2
5 2
52
7892
872 78 92
72
1 2
72
672
92
492
1 2
1872
1 2
542
5 2
7892
872 78 92
72
152
92
692
572
672
1 2
1872
1 2
4 2
552
7892
872 78 92
72
142
572
1772
592
692
1 2
1872
1 2
442
4 2
7892
872 78 92
72
162
592
1792
472
1772
1 2
1872
172
6 2
452
1872
872 78 92
2
72
472
1172
492
1792
1 2
1872
172
642
6 2
1872
872 78 92
2
12
492
1192
672
1172
1 2
1872
172
17 2
652
1872
872 78 92
2
2
672
1 72
692
1192
1 2
1872
172
1742 17 2 1872
872 78 92
2
2
692
1 92 1772 1 72
1 2
1872
172
11 2 1752 1872
872 78 92
2
1772 1 72 1792 1 92
1 2
1872
172
1142 11 2 1872
872 78 92
2
32
8 5 25 2122122282222 22
2!2!2" 2
Приложения
Powered by TCPDF (www.tcpdf.org)
283
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89
12345467289 6 3526
5 3 854 4 5 825 462 98 5 3484248 8 5 3 8
64264 782258
1234256789 49749 97 498 82 47395
35 2784 488 5974 35 278
724 8564 3429 8 8 2 2 2988 43954 #8270
#8278)
9856970
284
Powered by TCPDF (www.tcpdf.org)
!"# $%&'()(*
&&$&
9 %&& 38 $+&&
&&$+
!"# $%&'()(*
38 -&& 8 2 47395 72 2 8744 .&& 8 798
&&$&/
&&$+
38 %&& 8 2 47395 72 2 8744 .&& 8 798
&&$*/
&&*&
1234256789 49749 82 47395 97 498
2 87 4 8238,788 8 9 4 83 21479 274
35 278 724 8564 3429 8 43954
8 2 2 2988 83 274780 !"# $()$&
38 *&&
&&&(
9 *&& 38 .*&
&&$&
9 .*& 38 2&&
&&$*
3225595678 6 2 8,90 89478 4 852 7225974
98 83856788 999974 72 35479 4832 69970
8785670
4 388
9 *&& 38 %&&
1234256789 49749 874,988 8 9 4 47395
35 278 724 8564 3429 8 8 2 2 2988
43954 7
2 8
!"# $((.-)(*
38 -&&
&&*&
5 +.&
&&*2
5 $&&&
&&.&
9 $&&&
&&-&
Приложения
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89
12345467289 6 3526 5 3 854 4 5 825 462 98 5 3484248 4798 8642 983 5 7862458
8 5 3 8
!6426278"2258
1234256789 49749 97 498 82 47395
35 2784 488 5974 35 278
724 8564 3429 8 8 2 2 2988 43954 #8271
#8278)
9856971
&&$&
&&$,
!"# $%&'()(*
38 .&& 8 2 47395 72 2 8744 /&& 8 798
&&$&0
&&$,
38 %&& 8 2 47395 72 2 8744 /&& 8 798
&&$*0
&&*&
1234256789 49749 82 47395 97 498
2 87 4 8238-788 8 9 4 473959 83
22479 274 35 278 724 8564 3429 8
43954 8 2 2 2988 723 274781 !"# $()(&
38 *&&
&&&(
9 *&& 38 /*&
&&$&
9 /*& 38 +&&
&&$*
!"# $((/.)(*
38 .&&
&&*&
38 ,/&
&&*+
38 $&&&
&&/&
9 $&&&
&&.&
3225595678 6 884 887 93798 22 852
7225974 98 83856788 999974
72 35479 4832 59971
8785671
!"# $%&'()(*
9 %&& 38 $,&&
3225595678 6 2 8-91 89478 4 852 7225974
98 83856788 999974 72 35479 4832 59971
8785671
#4 3$88
9 *+& 38 %&&
1234256789 49749 874-988 8 9 4 47395
35 278 724 8564 3429 8 8 2 2 2988
43954 !"# $((/.)(*
38 .&&
&&*&
38 ,/&
&&*+
38 $&&&
&&/&
9 $&&&
&&.&
1234256789 49749 874-988 8 9 4 47395
8 2 47395
7
2 8
&&$&
399734578 6 84 2974 47395 4 2 8-91
89478 4 852 35 278 44781 852
Приложения
Powered by TCPDF (www.tcpdf.org)
38 $,& 72 3429 9 $+& &&$*
9 $,& 72 3429 9 /&& &&*+
285
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
12345678974
- 8'
385 9.7/
- 8'
5997/
758'
5458'
2567/
286
Powered by TCPDF (www.tcpdf.org)
4864
1234256789 49749
47395 97498 82
35 2784 385 2 35 278 724 856 4
34298 8 2 22988 43954 5 1
35944
!"# $%&'(&)
* 82
47395
385 2
38 &+
+++%
38 ,++
+++$
38 %++
+++&
1234256789 49749 8785678/ 8 24 27859778/
8944 852 35 278 724 856 4 34298
8 2 22988 43954 !"# $%0'(&)
* 891784
852
38 2,%
+++3
38 4,+
+++$
38 &++
++2+
1234256789 49749 8785678/ 8 24 27859778/
8746989 8949
47395 99379/ 2 4
35 278 724 856 4 34298 272542988
43954 !"# 22$%3'(,
* 82
47395
38 ,++
+++%
38 3++
+++$
Приложения
.
Приложения
Powered by TCPDF (www.tcpdf.org)
1 2 3 4 5 6 2 7 89
4
4
)4
)4
4
)4
895
4
4734
!59"#4$5%"&" "4
9'5443(4
!59"#4$5%"&" "4
9'5443(4
!59"#4
#$5, "-$59# 4
433(+34
""&4#$5, "4
-$59# 47 4
47((34
""&4#$5, "4
-$59# 47 4
47((34
4
4
+4
34
4
237 739
234932379
33*9
2389
2*9
329
54
121174
121174
12174
12174
12174
12774
4
1274
1214
81448514
81448514
112134
4
64
111448114
54
12(4
&4
."414//4
%9"0541224
3959&#4
811424
8511424
%&6414//4
3959&#4
811724
851174
64
64
'7 57839
589
.-,9!#!(+*+"9
11214
12174
1217*1214
54
4
!"4714
&4
12111214
54
4
714
&4
12774
74
4
64
64
54
12134
3 563 39
323373739
32*9
3567
9
32799
6279
23*9
7379
4379
435379
9
537
2 9
9
64
4
64
4
4
64
64
64
64
64
64
34
34
34
64
64
9!9
4 9;#9
64
74
1234
64
64
64
64
64
64
34
4
4
64
64
<9;#9
4 9!=#9
64
1234
124
64
64
64
64
64
64
34
74
74
64
64
<9
!=#9
,3 322789
239-./9
4597325 9
32389
232 99
74
64
64
64
64
64
64
34
4
4
64
64
859
237389
9 7:389329
45789
'5 932379
23 7 93237972789573789232 99 57999379 994 739 9!94 9"##99
9$%&'9()*++9
74
09
1 9
12343567839
27
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
287
.
288
Powered by TCPDF (www.tcpdf.org)
$2
'2
$2
'2
$2
'2
$2
'2
92172
12 2
6!2 55""7 #2
-912./72
2 &62
6!2,0,07 #2
-912./72
2 2 &2
6!2,0,07 #2
,2
-912./72
32 2 &2
6!2,0,07 #2
-912./72
2 2 &2
6!2,0,07 #2
52
92292
"2 .91#2 32
6!20,""7 #2
92292
)2 .91#2 32
6!20,""7 #2
6
45 6 8
25869
678
92172
12 2
6!2 55""7 #2
2
2
8
8
9
8
7 8
8
8
3433 2
3433 2
3433 2
3433 2
3433 2
3433 2
3433 2
3433 2
! 8
3 678
42" 4#48
2 4258
8
34 2
343 2
2
3433)*343302
34 2
34 2
2
2
12
2
12
2
12
2
(2
2
343"2
1343"2
3433 *3433"2
3433 *3433"2
12
12
343)2
134 32
2
(2
134352
243%9 4 8
& 6 8
69
68
3% 4#48
2 78
8
12
$ 6 8
6
8
678
7882
2
7882
%192
788292678882
788292678882
6+9267882
926788842
1192
6788292678882
6+92
(2
2
32
(2
(2
"2
2
(2
(2
"2
2
(2
2
2
(2
(2
2
2
(2
(2
2
2
(2
2
%78292%&782
(2
2
48)8
482*8
2
6788292 788842
%78292%&782
5 1
(2
34 2
34 2
(2
(2
2
2
(2
(2
2
2
(2
2
2
25382*8
48)4*8
(2
34 2
34 2
(2
(2
2
34 2
(2
(2
2
34 2
(2
2
34 2
2538
)4*8
8
6 88
3786 53458
69
7 8
9
458
8
""2
/3228
6
7 8
04 1 58
8
36 8
68
12343567897
6788292 78882
12 454" 8
938
'(8)*)+, ,-.8
1234567869
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приложения
.
Приложения
Powered by TCPDF (www.tcpdf.org)
!3
'3
45657893
93
13 98 585 31"43
43 3
45657893
93
"3 98 585 31"43
43 3
!3
'3
45657893
93
1(3 98 585 3243
43 3
45657893
93
65)* 93
985 3+3
431, 13
!3
45657893
93
1 3 98 585 3243
43 3
13
'3
45657893
93
13 98 585 343
43 3
6
45 6 8
25869
678
!3
2
45657893
93
123 98 585 343
43 3
8
8
9
8
7 8
8
8
"#""13
"#"13
"#"13
"#""23
"#""23
"#""3
"#""3
! 8
3 678
42" 4#48
2 4258
8
*3
3
$3
$3
$3
$3
$3
$3
$ 6 8
6
8
678
1"#"23
1"#"3
"#"3
1"#"3
"#123
1"#123
"#"3
1"#"3
243%9 4 8
& 6 8
69
68
3% 4#48
2 78
8
-973
%&&393%&&&3
$3
%&&3
%&&3
%&&3
%&&3
%&&3
12 454" 8
938
'(8)*)+, ,-.8
68
3
13
$3
3
$3
3
$3
3
/3228
6
7 8
04 1 58
8
36 8
1234567869
5 1
3
3
$3
23
$3
23
$3
3
48)8
482*8
13
"#23
$3
3
$3
3
$3
13
25382*8
48)4*8
"#23
"#3
$3
13
$3
13
$3
"#23
2538
)4*8
8
6 88
3786 53458
69
7 8
9
458
8
12343567897
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
289
.
290
Powered by TCPDF (www.tcpdf.org)
6
45 6 8
25869
678
9292
1 1192
91 2 2
!"#2$%&$ 7'(2
2
82
9 2
*2 ,12
!"#2%54$7'42
)2
82
2
)2
9 2
%2 1792
!"#2'*(&7&42
92,1 72
92
991 2-2
52 !"#2$%&$$7'(.2
92 92
9/ 10 2
11 2232
2
8
8
9
8
7 8
8
8
3433 <343$2
343$2
3433 2
3433$2
3433$2
! 8
3 678
42" 4#48
2 4258
8
2
*2
*2
2
" 2129929/ 72
56952 212 :;1 ,152
2 1 12
12
92132
2
" 2129929/ 72
56952 212
2 1 12
1$327922
$2
" 2129929/ 72
56952 212 :;1 ,152
2 1 12
12
92132
2
2
2
2
2
2
/3228
6
7 8
04 1 58
8
36 8
68
5 1
*52
*52
*52
$52
*2
*2
2
2
2
2
2
2
48)8
482*8
*%2
%2
%2
34*%2
*2
*2
2
2
2
2
2
2
25382*8
48)4*8
**2
$*2
$*2
34**2
*2
2
2
2
2
2
2
2
2538
)4*8
8
6 88
3786 53458
69
7 8
9
458
8
12343567897
" 2129929/ 72
1$< 27952 56952 212
2 1 12
2
2
34342
2
$2
1$2
2
12
2
2
343%2
343%2
2
2
2
2
343 2
12
+192
6788292678882
343*2
34352
12
12 454" 8
938
'(8)*)+, ,-.8
2
243%9 4 8
& 6 8
69
68
3% 4#48
2 78
8
$ 6 8
6
8
678
1234567869
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приложения
.
Приложения
Powered by TCPDF (www.tcpdf.org)
!3
/1 0 0 8 1 3
!"#32546&3
!3
! 8 1 3
93 1 3
!"#365526%&3
9(9923
73
73
73
73
73
73
73
73
73
+31.3
3
3
3
2,1 * 13
1 13
3
43
33
3
43
3
3
73
3
3
73
73
%3
73
%3
53
53
453
48)8
482*8
3
3
3
23
3
3
3
73
73
$3
73
4$3
63
463
263
25382*8
48)4*8
73
73
73
73
73
73
73
73
73
3
3
23
73
73
73
2538
)4*8
8
6 88
3786 53458
69
7 8
9
458
8
2,1 * 13
1 13
73
73
3
3
3
+31.3
3
43
/3228
6
7 8
04 1 58
8
36 8
13 33
33 13
3 113
13 33
33 13
3 113
12 454" 8
938
'(8)*)+, ,-.8
68
5 1
13 2&(3 683 4&83 11 31 1.311 *3739)93
293
9(94)9(93
83
03
9(94)9(93
13
9(23
43
*3
*3
43
83
13
9(923
9(94)9(93
83
73
73
13
3
*43
9(23
9(23
9(23
823
+ ,-3 11 3
3
123
293
243%9 4 8
& 6 8
69
68
3% 4#48
2 78
8
*43
843
123
$ 6 8
6
8
678
9(93
9(923
9(994)9(993
! 8
3 678
42" 4#48
2 4258
8
1297 89435
,38 11673* 3 11373 ,, 33 &839)4993 3&83499)993 &839)43 5&834)293 6&839)2993 %&83299)4993 $&43
!3
! 8 1 3
4$3 11 , 3
!"#3636956&3
4%3
'3
83 1 3
463
!"#3229$%6&3
6
45 6 8
25869
678
'3
2
831 3
453
!"#3229$%6&3
8
8
9
8
7 8
8
8
1234567869
12343567897
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
291
.
292
Powered by TCPDF (www.tcpdf.org)
1 2 3 4 5 6 2 7 89
437 739
2349
32379
789
3
353
98 !3
"9# $ 38%93
313
98 !3
"9# $ 38%93
313
98 !3
!"9( )*"98! 3
31'3
$3!"9( 3
)*"98! 353
3511&&3
$3!"9( 3
)*"98! 353
3511&&3
$3!"9( 3
)*"98! 33
3511&&3
53
3
&3
'3
3
3
3
53
'3
53
'3
5+3
3
3
5+3
53
53
53
53
3
3
523
53
53
523
523
3
523
23
3
3
3
23
523
523
523
123
123
523
.9
-9
4 9
/9
9
!9
4 9
-9
'3
53
5+3
3
53
53
523
3
53
523
3
23
523
3
523
123
.9
/9
4 9
!#9
'3
3
5+3
+3
53
53
523
3
53
523
3
23
523
3
523
123
.9
!#9
4 9
!)9
.9
-#9
4 9
"#9
'3
3
5+3
+3
53
53
523
3
53
523
3
23
523
523
523
123
'3
3
5+3
+3
53
53
523
3
53
523
3
23
523
523
523
123
12343567839
.9
!)9
4 9
-#9
.9
)#9
4 9
!0#9
.9
!0#9
4 9
!)#9
'3
3
5+3
+3
53
53
523
3
53
523
3
23
523
523
523
423
3
3
+3
+3
53
53
523
3
53
523
3
23
523
523
523
5223
3
3
+3
&3
53
53
523
3
53
523
3
3
523
523
523
5223
23 7 93237959
.9
"#9
4 9
)#9
,732589232 932389435399
13
63
+3
'3
53
53
523
3
53
523
3
&23
523
523
523
5223
.9
!)#9
4 9
0"#9
63
63
63
63
63
53
523
3
23
523
523
&23
523
523
523
63
.9
0"#9
4 9
-!"9
63
63
63
63
63
53
523
3
23
523
523
&3
523
523
523
63
.9
-!"9
4 9
1##9
63
63
63
63
63
53
523
3
23
523
523
'23
523
523
5123
63
.9
1##9
4 9
"##9
23 7 93237972789573789232 99 57999379 994 739 9!94 9"##99
9$%&'9()*++9
29
3 9
12343567839
37
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приложения
.
Powered by TCPDF (www.tcpdf.org)
Приложения
)!2
2
34546782*9 8 2
$87947 49 23+2
32'"2
34546782*9 8 2
$87947 49 23+2
32'"2
34546782*9 8 2
$87947 49 23+2
32'"2
2
(2
2
2
)!2
)!2
#87 49 2$4%42
4494 2&32
32"'"'2
2
)!2
(2
(2
)!2
2
2
#87 49 2$4%42
4494 2&32
32"'"'2
2
)!2
2
2
12
!2
!2
#87 49 2$4%42
4494 2&32
32"'"'2
)2
12
2
2
(2
!2
!2
#87 49 2$4%42
4494 2&2
32"'"'2
"2
(2
2
2
345467829
42
232
32112
12
6
3
!7 42 6724
54367
4542
2
)!2
2
)!2
12
(2
(2
2
2
!2
2
!2
2
6
2
)!2
2
)!2
12
(2
(2
2
2
!2
!2
!2
2
6
6
6
2
)!2
2
)!2
12
(2
(2
2
2
!2
(2
!2
2
2
)!2
2
)!2
12
(2
(2
2
2
!2
(2
!2
2
2
)!2
2
)!2
12
(2
2
2
2
!2
(2
2
2
2
)!2
2
2
12
(2
2
2
'2
!2
(!2
2
2
4542
6
2
)!2
2
2
"2
(2
2
2
'2
!2
(!2
2
2
&
6
454 9 43784
"5448#294 $54%2 3 6
45 6 123456789 57
2
2
2
2
"2
2
2
2
'2
2
2
2
2
6
2
2
2
2
2
2
2
2
2
2
2
2
2
6
12343567897
2
2
2
2
2
2
2
2
2
2
2
2
2
6
2
2
2
2
2
2
2
2
2
2
2
2
2
6
5 1
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
293
.
294
Powered by TCPDF (www.tcpdf.org)
!3
13
45657893
93
98 585 31#43
4323
45657893
93
65%& 93
985 3'3
431(123
#3
13
3
!3
45657893
93
98 585 31#43
4323
13
45657893
93
65%& 93
985 3'3
431(123
1$!3
3
45657893
93
98 585 3!43
4323
1"3
13
#$!3
1$!3
!3
3
45657893
93
98 585 3!43
4323
13
13
#$!3
1$!3
!3
3
3
13
13
45657893
93
98 585 343
4323
123
6
3
!7 42 6724
54367
4542
13
#$!3
1$!3
1$!3
!3
!3
3
3
13
6
13
#$!3
1$!3
1$!3
!3
!3
3
3
13
6
6
6
45 6 13
#$!3
1$!3
1$!3
!3
!3
3
3
13
13
#$!3
1$!3
1$!3
!3
!3
3
3
13
13
#$!3
1$!3
1$!3
!3
!3
3
3
13
1$!3
#$!3
$#3
1$!3
!3
!3
3
!3
13
4542
6
1$!3
#$!3
$#3
1$!3
!3
!3
3
!3
13
&
6
454 9 43784
"5448#294 $54%2 3 6
123456789 57
1$!3
3
$!3
3
3
3
3
3
3
6
3
3
$!3
3
3
3
3
3
3
6
12343567897
3
3
($#3
3
3
3
3
3
3
6
3
3
($!3
3
3
3
3
3
3
6
5 1
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приложения
.
Powered by TCPDF (www.tcpdf.org)
!7 42 6724
54367
4542
9
4 4
4
44
9 !"46#$66%&'4
4(
454
( ) * 4
+ ,4 -4
. 4( / 4
9 !"4%3&$$04
. 4
4
9 !"4#806%04
! 144
9 !"4661&0$34
784
Приложения
7#4
734
7%4
#4
#4
#4
74
74
#4
#4
#4
74
74
84
12%4
12%4
84
34
34
34
34
84
84
64
64
74
1234
1234
74
6
3
#4
#4
74
#4
84
74
12%4
34
34
84
74
64
1234
6
6
6
45 6 #4
#4
#4/ 4
7344
74
74/ 4
7344
#4/ 4
7344
#4
#4/ 4
7344
74
74/ 4
7344
84
12%4
12%4/ 4
7344
84/ 4
7344
34/ 4
7344
34
84
74
64
1234
34
#4
74
%4
#4
74
1204
614
34
84
74
64
1234
614
84
74
64
1234
&
6
614
34
62$4
614
714
614/ 4
61144
34
734
614
34
74/ 4
71144
734
614
84
74
64
54
6
734/ 463144
614/ 463144
34/ 463144
714/ 4
634/ 4
63144 71144
4
4
34
62%4/ 4
63144
634/ 4
714/ 4
63144 71144
614
84
74
64
1234
34/ 4
61144
84/ 4
61144
614
34
34
62#4/ 4
61144
614
614
84
74
64
1234
4542
6
454 9 43784
"5448#294 $54%2 3 6
123456789 57
34
34
84
74
64
1234
6
54
54
54
814
614
34
7234
814
634
84
74
64
54
6
12343567897
54
54
54
#14
614
%4
84
#14
634
84
74
64
54
6
54
54
54
314
614
$4
8234
314
714
84
74
64
54
6
5 1
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
295
.
296
Powered by TCPDF (www.tcpdf.org)
!7 42 6724
54367
4542
89
3 9 3
83112753
3
! " 3
83167#3
! " 3
" 9 " $%9 3
8377273
! " 3
9 3
837173
673
63
63
#23
123
123
623
623
53
53
1&53
1&53
53
53
53
53
53
53
53
53
6223
6223
153
153
1223
153
1223
623
53
53
1&53
53
53
53
6223
1223
43
123
6
43
43
6
3
623
53
53
623
123
53
1&53
53 3
653""3
53 3
653""3
53
6523
1223
153
43
123
53
1&53
6
6
45 6 623
123
53
1&53
623
53
53
6523
1223
153
43
123
623
123
53
6&23
623
123
53
#223
1523
623
43
123
623
123
53
6&23
#223
1523
623
43
123
#223
1523
623
43
123
&
6
43
43
43
43
623 31223""3
53 31223""3
53 31223""3
4542
6
454 9 43784
"5448#294 $54%2 3 6
53
53
6523
1223
153
43
123
6
123456789 57
43
43
43
43
#223
1523
23
153
123
6
43
43
43
43
43
43
43
#223
1523
23
153
123
6
12343567897
23
673
123
6
43
43
43
43
43
43
43
43
43
43
43
43
43
43
1523
#23 3
#223""3
#223
523
613
123
6
5 1
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приложения
.
Приложения
Powered by TCPDF (www.tcpdf.org)
$6 !"96 %2
"
!"96 &9
242
$6 !"96 %2
7, 16! 7%92
2--#2
#2
2
42
2#2
42
5617897
2
242
42
92
2
242
,37 739
32379
-379
435379
9
.37
2 (9
9
2
42
.9*2 1/!,2
(2
82
,2
2
12
42
2
2
2
42
32
2
12
32
0 563 39
323313739
323567
9
32'7(99
12
/279
23#9
7379
2
4#2
)!7 9(%92"9 %2
+8!2 112
2! !( 1" 2 2
"
!"96 2
4#2
)!7 9(%92"9 %2
+8!2 112
2! !( 1" 2 2
617!(!&7%92 !* 12
#2
#2
)!7 9(%92"9 %2
48!2 112
2! !( 1" 2 2
617!(!&7%92 !* 12
2
2
2
'617!(!&71 2"9 12
32
32
32
66961
2! 177!8!2
76 !"96 12
32
*2349
7 29
332 #9
69
327 9
32(9
11(929
5 932379
1 2 3 4 5 6 2 7 89
9 9!"#$$%9
2
2
2
2
2
2
2
32
32
949
4 9569
2
2
#2
#2
#2
2
2
32
32
79569
4 99
&3 32278923'(9
)*(94594 793#9
2389232 (99
23 7 932379723779573789232 994 739 4 999
+9
9
12343567839
27
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
297
.
298
Powered by TCPDF (www.tcpdf.org)
34352
23433)2
343332
34333)2
+ 7 , 2
9789819 2
++-22.+-2
"#$%&2/3((5*2
39 18 72
, 272 87 89 2
, 2
"#$%&25/2(/*2
)2
22
% 123432! 2343212
% 123432! 234312
2
!2
% 123432! 234312
2
54)2
342
54)2
342
% 1234352! 234312
2
67819
9 2 12
, 2#$%&25/2)(/2
342
2
12
2
2
2
54)2
342
9 2 2
5 217712
72 12
7819
9 2 12
9 2 2
5 217712
72 122
7819
9 2 12
342
4458
42$8
45 4268
45 2678
118 & 8
'
678
9 2 12
67819
258
2 45&68
1234567869
2
3452
34352
2
2
34352
#243$9 4 8
% 6 8
69
6 3$ 4!48
2 78
8
12
" 6 8
6 8
678
1297 89712122719 42515 26!2, 422 8 7812
343352
45 6 8
678
8 8 2
9!18 9 2
"#$%&2'()*2
6
69
2
8
8
8
3 678
42 4!48
2 4258
8
5 1
2
2
2
2
2
)2
2
2
2
48(8
48)*+8
2
2
2
2
2
0 2
5)322
2
2
2
25,8)*+8
48-++8
8 6 8
8378694 869 8
7 8 9
458
8
12343567897
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Приложения
.
Приложения
Powered by TCPDF (www.tcpdf.org)
55532
255542
55532
5532
255572
! "2 )1 " 2
2%%42
! "2 )1 " 2
2'4&&72
* $ +"2 $ !
2%5&32
0 (!1 # $ 2+ 2
$2 $#
"!2+ !2
23&%&%2
62
&2
72
2
555542
555572
5532
! "2! ! # $ 2
23572
42
1, " 2**-22.*-2
5572
2532
9 1
2
2362
,37 739
32379
-379435379
.37
9
2 '9
9
72
62
2
32
2
472
32
12
(2
2
672
(2
82
42
372
12
2
372
&72
2
)2
4%2
12
352
82
2
2
82
12
72
4552
2
(2
3452
)2
)9("9
4 99
72
62
472
42
572
352
72
672
472
452
352
72
772
672
82
82
4552
3452
12343567839
9(9
4 9("9
12
/279
237379
1 2 3 4 5 6 2 7 89
9 9!"#$$%9
)9(*9
4 9*9
)9*9
4 99
72
&2
672
472
52
352
82
82
82
472
372
352
72
&72
372
352
4552
3652
82
82
82
82
82
/ 2
3752!!2
82
82
82
472
372
352
72
72
452
372
4552
3752
82
82
82
82
82
82
82
82
82
652
452
82
332
'2
42
452
4452
82
23 7 93237'909
)99
4 9(*9
&732589232 9323894353'99
23 7 932379723779573789232 994 739 4 999
32
+9
9
12343567839
37
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
299
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89
123456577829
3 49 2 27 437
9
7
99 9!!9
9
1 !750759 759
4 4 )9 789
! ' 93'59
"#529945 9 $7 9
3 45956!25 9
4 73%&2' 94 43%9 7393'59
99 $722 9
( $78)*9
+99, 9
( 2 7)*9
1
123453
99- 9
('3.8)*9
3 49 2 27 437
/ 9
( $2709'3.8)*9
9
56573
56453
56473
56893
345323473
5653
56483
56853
563
347323893
56453
56473
56893
563
38932353
56483
56853
563
5693
3532373
56473
56893
563
5673
373234553
56853
563
5693
563
34553234753
56893
563
5673
4653
34753238953
563
5693
563
4683
3895323553
563
5673
4653
4673
355323753
5693
563
4683
8653
37532345553
5673
4653
4673
8693
3455532347553
563
4683
8653
3
3475532389553
4653
4673
8693
3
389553235553
4683
8653
3
93
35553237553
4673
8693
3
73
37553234535553
8653
653
93
3
483
43
43
493
3223
38743
8 5 25 3 4 3!"3 #"$%63 &3 &22'2(3 22)3 %&"$" (3 2%&3 '&%*)'263
'+")32 ',23*3232 ',2632#'"$%-.")3#1* %-32'2%3')+2/23%/*"63
"3 '3 2"&2 ,3 '"$+'",3 2'23 %/*"303 2 ',263 +-.")3 + %-3 '2,2 "2 3
8 31*3 3 &2'2&2(3 2'22(3 %/*"3 )$"23 &2*&23 &22''%-.,3 '"$+'2 3 '"$2(32
26323%&"$" (32%&3'&%*)'23 #'")323#2*322+%3& "*% 3
312%&323"#*232*3 32#*-")3#$3 *2&3"3,3 3'3", 3
300
Powered by TCPDF (www.tcpdf.org)
Приложения
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89
123456577829
3 49 9279
4
1 %75'178,9 5%29
59
&5'29'94'5 9 (7 956%25$9
73)*2 9 299 2 %975 5'279
"99 (722$9
+ (78,-9
".99"/$9
+ 2 7,-9
2
123453
"99"$9
+38,-9
"0$9
+ (271938,-9
3 49 9279
565783
56593
56453
564 3
3453234 3
5653
56583
56473
56753
34 323783
56593
565 3
564 3
56783
378323953
56583
5653
56753
563
395323 3
565 3
56453
56783
5693
3 3234553
5653
56473
563
5683
34553234 53
56453
564 3
5693
56 3
34 53237853
56473
56753
5683
563
37853239553
564 3
56783
56 3
4653
3955323 53
56753
563
563
4673
3 532345553
56783
5693
4653
46 3
345553234 553
563
5683
4673
7653
34 5532378553
5693
56 3
46 3
7683
3785532395553
5683
563
7653
3
39555323 553
56 3
4653
7683
93
3 553234535553
563
4673
653
83
453
443
43
493
3223
379 943
7
99 !"#$9%%9
8 5 25 3 4 3!"3 3 # $3 2%&2$3 '(#23 )2")232 *3 %#($%2 3 %#(2+322
63 23 ,)#(# +3 2,)3 2%& 2-23 .'3 .%#'3 23 .2"3 22$,3 ) #", 3 7 3/#3
.#(,63 )3 )22%2+3 22'3 ,)#(# +3 2,)3 2%& 2-23 .'63 %$#'3 23 2 %*2
63$01+3.2",03",63%32#)2 *3"#*3332 %*2332,)2$3#$%#323
.2"3 22$,3 ) #",63 %3 2#)2 *3 ) #"#*333 2 %*23 3 .2"$3 #$%2$ 3
312,)323#."&3+ " 3%3#"3 3%4#*3 "2)3#3 3785 54 3
Приложения
Powered by TCPDF (www.tcpdf.org)
301
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
1 2 3 4 5 6 2 7 89
7
123456577829
3 49
7 9 22 2279 29
5 57 92799 27 9 99 !"#$%&'99
9
1 75789
5629
1
3 49
12343
()529945
&99 7229
, 78-9
7
9 22 2279
2 2*+2 9
& 99&"9
,38-9
3 45956259
&09
, 27938-9
295 57 9279
56893
5693
5643
34323853
5653
5683
56973
563
38532383
5653
56953
5643
5673
38323453
56853
56973
563
563
345323753
56893
5643
5673
563
3753238953
5683
563
563
8653
38953239753
56953
5673
563
8693
3975323553
56973
563
8653
863
355323453
5643
563
8693
9653
34532385553
563
8653
863
9673
385553238553
5673
8693
9653
4653
385532397553
563
863
4653
653
843
83
873
83
1
12343
Powered by TCPDF (www.tcpdf.org)
9
56573
3223
39483
302
9 7
&.99&/9
, 2 7-9
3 49 27
9
5693
5643
5673
563
34323853
56973
563
563
8653
38532383
5643
5673
563
8693
38323453
563
563
8653
863
345323753
5673
563
8693
9653
3753238953
563
8653
863
9673
38953239753
563
8693
9653
4653
3975323553
8653
863
9673
653
355323453
8693
9653
4653
7653
34532385553
863
9673
653
653
385553238553
9653
4653
7653
653
Приложения
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
12343567897
5 1
1
6 45 1
481
12345678996
6
996
1556 6
16 876
2345678716561954
1617
881
7
1
17
761 8858 1 9414841
!161"1
8 6 1
#161$1
% 1
6
96
896
7996
796
7 6
76
76
&1
8 1% 1
1297 896 76 !"6 6 5#555$6 5%6 6 &&5# 6 #25 536 26
'&5#'( &623#')56 6* 6 &'(3&6#'+&5# &6 &'5$6, (4%6+6 '&5
# 26#'&'#2'5& %6(6,'+ 2 %6 25#- 5%6(6, (4%6+6#'+&5# 26&5) !6 25#- $&6 ,#'+!./&6 #'&'#2'5&3%6(6 ,'+ 23%6 &&5#356 0(5&536 6* 6 #5
5($./&6 !" &6 #'+&5#'6 &'5$6 !"6 #'+&5#'6 #'&'#2'5& 1 6 (6 ,'+ 2 1 6
0(5&5'6 6 , (556 1#!, &!6 "2'(5!6 (6 "('!6 6 62'6 ,'+!6 "6 " # %6 $6
5!"'+'3%6 !"6 6 ',(356 #&'5$6 6 ( " 6 &&5#6 25#- 6
&5./5%6, (4!.6 (!6#6 '" 23-6 ('-6460(5&5'6&5./51 6 !"6#'+&5#'6 6
, (556 &!6 "2'(5!6 #6 '" 23-6 "2'(5'-646 0(5&5'6 6 ,5(4&6 #'+&5# &6
6 !"6 6',(356 5%25(36#6'(6265#5)563( "6'616 98676
Приложения
Powered by TCPDF (www.tcpdf.org)
303
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ЛИТЕРАТУРА
1. Степанов, Ю. С. Альбом контрольноизмерительных приспособлений : учеб. пособие /
Ю. С. Степанов, Б. И. Афанасьев, А. Г. Схиртладзе [и др.] ; под ред. Ю. С. Степанова. —
М. : Машиностроение, 1998. — 184 с.
2. Александров, А. М. Наладка и эксплуатация станков с ЧПУ : учеб. пособие. — СПб. : Изд.
ПИМаш, 2009. — 124 с.
3. Александров, А. М. Технологическая подготовка многооперационных станков : учеб. по
собие / А. М. Александров, Ю. М. Зубарев. — СПб. : Изд. ПИМаш, 1995. — 106 с.
4. Александров, А. М. Надежность автоматических линий и технологических систем : учеб.
пособие / А. М. Александров, Ю. М. Зубарев, Н. Н. Ревин. — СПб. : Изд. ПИМаш,
2011. — 72 с.
5. Андреев, Г. Н. Проектирование технологической оснастки машиностроительного произ
водства : учеб. пособие / Г. Н. Андреев, В. Ю. Новиков, А. Г. Схиртладзе ; под ред. Ю. М. Со
ломенцева. — М. : Высш. шк., 2001. — 415 с.
6. Ансеров, М. А. Приспособления для металлорежущих станков. — М. : Машиностроение,
1975. — 656 с.
7. Болотин, Х. Л. Станочные приспособления / Х. Л. Болотин, Ф. П. Костромин. — М. :
Машиностроение, 1973. — 315 с.
8. Блюменштеин, В. Ю. Проектирование технологической оснастки / В. Ю. Блюменштеин,
А. А. Клепцов. — СПб. : Лань, 2011. — 224 с.
9. Горохов, В. А. Проектирование технологической оснастки. — Минск : Бервита, 1997. —
344 с.
10. Горохов, В. А. Проектирование технологической оснастки / В. А. Горохов, А. Г. Схир
тладзе. — Старый Оскол : ТНТ, 2013. — 432 с.
11. Горошкин, А. К. Приспособления для металлорежущих станков : справочник. — М. : Ма
шиностроение, 1979. — 303 с.
12. Зубарев, Ю. М. Расчет и проектирование приспособлений : учеб. пособие. — СПб. : Изд.
ПИМаш, 1993. — 58 с.
13. Зубарев, Ю. М. Основы расчета и проектирования станочных приспособлений : учеб. по
собие / Ю. М. Зубарев, М. А. Алейникова, А. А. Мусаэлян. — СПб. : Изд. ПИМаш, 2011. —
112 с.
14. Зубарев, Ю. М. Расчет и проектирование зажимных устройств приспособлений : учеб.
пособие / Ю. М. Зубарев, Л. А. Куцанов, В. Г. Юрьев [и др.]. — СПб. : Изд. ПИМаш,
2004. — 88 с.
15. Зубарев, Ю. М. Автоматизация координатных измерений : учеб. пособие / Ю. М. Зубарев,
С. В. Косаревский, Н. Н. Ревин. — СПб. : Изд. ПИМаш, 2011. — 160 с.
16. Корсаков, В. С. Основы конструирования приспособлений. — М. : Машиностроение,
1983. — 277 с.
17. Константинов, О. Я. Магнитная технологическая оснастка. — Л. : Машиностроение,
1974. — 382 с.
18. Краткий справочник металлиста / под общ. ред. П. Н. Орлова, Е. А. Скороходова. — М. :
Машиностроение, 1996. — 960 с.
19. Кузнецов, Ю. И. Оснастка для станков с ЧПУ : справочник / Ю. И. Кузнецов, А. Р. Маслов,
А. Н. Байков. — М. : Машиностроение, 1983. — 359 с.
304
Powered by TCPDF (www.tcpdf.org)
Литература
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
20. Крутов, В. Н. Графические изображения некоторых принципов рационального конструи
рования в машиностроении : учеб. пособие / В. Н. Крутов, Ю. М. Зубарев, И. В. Демидович
[и др.]. — СПб. : Лань, 2011. — 208 с.
21. Маталин, А. А. Технология механической обработки. — Л. : Машиностроение, 1977. —
464 с.
22. Маталин, А. А. Технология машиностроения. — СПб. : Лань, 2008. — 496 с.
23. Переналаживаемая технологическая оснастка / под ред. Д. И. Полякова. — М. : Машино
строение, 1988. — 248 с.
24. Приемышев, А. В. Курсовое проектирование по технологии машиностроения : учеб. посо
бие / А. В. Приемышев, Ю. М. Зубарев, А. М. Александров [и др.]. — СПб. : Изд. ПИМаш,
2005. — 200 с.
25. Приемышев, А. В. Технологические методы обеспечения точности обработки загото
вок : учеб. пособие / А. В. Приемышев, Ю. М. Зубарев, В. Г. Юрьев [и др.]. — СПб. : Изд.
ПИМаш, 1997. — 81 с.
26. Схиртладзе, А. Г. Основы технологии механической обработки : учеб. пособие / А. Г. Схир
тладзе, Ю. М. Зубарев, Л. А. Куцанов. — СПб. : Изд. ПИМаш, 1994. — 150 с.
27. Станочные приспособления : справочник. В 2х т. / ред. совет Б. Н. Вардашкин [и др.]. —
М. : Машиностроение, 1984. — Т. 1. — 592 с. ; Т. 2. — 656 с.
28. Серебреницкий, П. П. Краткий справочник технологамашиностроителя. — СПб. : Поли
техника, 2007. — 951 с.
29. Справочник конструктора : справочнометодическое пособие / под ред. И. И. Матюшева. —
СПб. : Политехника, 2006. — 1027 с.
30. Справочник технологамашиностроителя / под ред. А. Г. Косиловой, Р. К. Мещерякова. —
М. : Машиностроение, 1986. — Т. 1. — 656 с.
31. Справочник технологамашиностроителя / под ред. А. Г. Косиловой, Р. К. Мещерякова. —
М. , 1985. — Т. 2. — 496 с.
32. Бердников, Л. Н. Справочник фрезеровщика / Л. Н. Бердников, В. Ф. Безьязычный
[и др.]. — М. : Машиностроение, 2010. — 272 с.
33. Стратиевский, И. Х. Абразивная обработка : справочник / И. Х. Стратиевский,
В. Г. Юрьев, Ю. М. Зубарев. — М. : Машиностроение, 2010. — 352 с.
34. Терликова, Т. Ф. Основы конструирования приспособлений : учеб. пособие / Т. Ф. Тер
ликова, А. С. Мельников, В. И. Баталов. — М. : Машиностроение, 1980. — 119 с.
35. Технологическая оснастка машиностроительных производств : учеб. пособие : в 2х ч. /
сост. А. Г. Схиртладзе. — М. : МГТУ «Станкин», 1998.
36. Уткин, Н. Ф. Приспособления для механической обработки. — Л. : Лениздат, 1983. —
176 с.
37. Уткин, Н. Ф. Базирование и закрепление заготовок в приспособлениях. — Л. : Лениздат,
1984. — 104 с.
38. Шишов, Г. А. Технология производства турбин / Г. А. Шишов, Ю. М. Зубарев, В. И. Ка
тенев. — СПб. : Изд. ПИМаш, 1998. — 392 с.
39. Юрьев, В. Г. Расчет точности станочных приспособлений : учеб. пособие / В. Г. Юрьев,
Ю. М. Зубарев, А. Г. Схиртладзе [и др.]. — СПб. : Изд. ПИМаш, 2002. — 92 с.
40. Юрьев, В. Г. Приспособления для контроля точности деталей : учеб. пособие / В. Г. Юрьев,
Ю. М. Зубарев, А. В. Приемышев [и др.]. — СПб. : Изд. ПИМаш, 2007. — 96 с.
Литература
Powered by TCPDF (www.tcpdf.org)
305
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
ОГЛАВЛЕНИЕ
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Глава 1
Теоретические основы расчета и проектирования приспособлений . . . . . . . . . . . . 9
1.1. Назначение приспособлений и их классификация . . . . . . . . . . . . . . . . 9
Классификация приспособлений (по В. С. Корсакову) . . . . . . . . . . . 11
1.2. Принципы установки заготовок в приспособлениях . . . . . . . . . . . . . 12
1.2.1. Количество баз, необходимое для базирования . . . . . . . . . . . . 16
1.3. Выбор баз при проектировании технологических процессов . . . . . . . 22
1.3.1. Виды баз . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.3.2. Назначение технологических баз . . . . . . . . . . . . . . . . . . . . . . . 28
1.3.3. Погрешности базирования заготовок при различных
способах их установки и обработки . . . . . . . . . . . . . . . . . . . . . . 30
1.4. Установочные элементы приспособлений . . . . . . . . . . . . . . . . . . . . . . 33
1.4.1. Требования, предъявляемые
к установочным элементам приспособлений . . . . . . . . . . . . . . 33
1.4.2. Виды опор . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.5. Зажимные устройства приспособлений.
Методика расчета сил зажима . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.5.1. Требования, предъявляемые к зажимным устройствам . . . . . 41
1.5.2. Методика расчета сил зажима . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.5.3. Примеры определения усилия зажима
для различных случаев закрепления заготовки . . . . . . . . . . . . 44
1.6. Расчет точности изготовления приспособления . . . . . . . . . . . . . . . . . 46
Глава 2
Зажимные механизмы приспособлений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.1. Винтовые зажимы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.2. Эксцентриковые зажимы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.3. Клиновые зажимы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.4. Рычажные зажимные устройства (прихваты) . . . . . . . . . . . . . . . . . . 55
2.5. Рычажно7шарнирные усилители . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.6. Составление расчетной схемы и исходного уравнения
для расчета зажимного усилия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.7. Установочно7зажимные механизмы приспособлений . . . . . . . . . . . . 58
2.7.1. Классификация самоцентрирущих механизмов . . . . . . . . . . . 60
Механизмы с упругодеформируемыми элементами . . . . . . . . 61
Глава 3
Силовые приводы приспособлений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.1. Выбор зажимного устройства . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.1.1. Выбор типа силового механизма и определение
необходимого исходного усилия закрепления . . . . . . . . . . . . . 67
3.2. Пневматический привод . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.2.1. Материалы для изготовления деталей пневмодвигателей . . . . 72
3.3. Гидравлические приводы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.4. Пневмогидравлические и механогидравлические приводы . . . . . . . 75
3.5. Вакуумный привод . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
3.5.1. Вакуумные захваты . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.6. Электромеханический привод . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.7. Электромагнитные и магнитные приводы . . . . . . . . . . . . . . . . . . . . . 82
3.8. Электростатический привод . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.9. Приводы, не требующие подвода дополнительной энергии . . . . . . . . 85
306
Powered by TCPDF (www.tcpdf.org)
Оглавление
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Глава 4
Корпусы и вспомогательные элементы приспособлений . . . . . . . . . . . . . . . . . . . .
4.1. Корпусы приспособлений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2. Кондукторные втулки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3. Копиры . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4. Установы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5. Делительные устройства . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
87
90
93
94
95
Глава 5
Унификация и стандартизация станочных приспособлений . . . . . . . . . . . . . . . . . 97
5.1. Универсальные безналадочные приспособления . . . . . . . . . . . . . . . 100
5.2. Универсальносборные приспособления . . . . . . . . . . . . . . . . . . . . . . 101
5.3. Универсальноналадочные приспособления . . . . . . . . . . . . . . . . . . . 103
5.4. Сборноразборные приспособления . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.5. Примеры унификации узлов и конструкций
переналаживаемых приспособлений
для токарных станков . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.6. Принципы проектирования приспособлений
для станков с ЧПУ и ГПмодулей . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.7. Механизация и автоматизация приспособлений . . . . . . . . . . . . . . . 114
5.8. Компьютерные технологии проектирования
технологической оснастки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Глава 6
Расчет и проектирование зажимных устройств приспособлений . . . . . . . . . . . . .
6.1. Общие правила закрепления заготовок . . . . . . . . . . . . . . . . . . . . . . .
6.2. Классификация зажимных устройств . . . . . . . . . . . . . . . . . . . . . . . .
6.3. Расчет зажимных устройств . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1. Определение сил и моментов резания . . . . . . . . . . . . . . . . . . .
6.3.2. Составление расчетной схемы для определения силы
зажима Q и исходного усилия W . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.3. Выбор значений коэффициентов трения . . . . . . . . . . . . . . . . .
6.3.4. Расчет коэффициента надежности закрепления . . . . . . . . . .
6.4. Выбор типа зажимного устройства и силового механизма.
Определение необходимого исходного усилия . . . . . . . . . . . . . . . . .
6.4.1. Обычные зажимные устройства . . . . . . . . . . . . . . . . . . . . . . .
6.4.2. Самоцентрирующие зажимные механизмы . . . . . . . . . . . . . .
6.5. Расчет приводов зажимных устройств . . . . . . . . . . . . . . . . . . . . . . .
6.5.1. Пневматический привод . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.2. Гидравлический привод . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.3. Пневмогидравлический привод . . . . . . . . . . . . . . . . . . . . . . . .
6.6. Пример расчета зажимного устройства приспособления . . . . . . . . .
Powered by TCPDF (www.tcpdf.org)
118
118
118
119
119
123
132
132
134
135
140
150
150
156
157
158
Глава 7
Расчет точности станочных приспособлений . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1. Основные положения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2. Систематические погрешности обработки . . . . . . . . . . . . . . . . . . . .
7.2.1. Погрешности станка Dс . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.2. Погрешности, вызываемые тепловыми деформациями
технологической системы при нагреве DТ . . . . . . . . . . . . . . . .
7.2.3. Погрешности, связанные с инструментом Dинс . . . . . . . . . . . .
7.2.4. Погрешности, вызванные деформацией технологической
системы под действием сил резания Dд . . . . . . . . . . . . . . . . . .
7.3. Случайные погрешности . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.1. Мгновенное рассеяние wм . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.2. Погрешности, связанные с уводом инструмента
при обработке, wув . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.3. Погрешность базирования wб . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.4. Погрешность закрепления wзак . . . . . . . . . . . . . . . . . . . . . . . .
168
171
172
Оглавление
307
162
162
164
164
164
165
167
168
168
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
7.3.5. Погрешность, вызванная износом установочных
элементов приспособления wизн . . . . . . . . . . . . . . . . . . . . . . . .
7.3.6. Погрешность установки приспособления
на станке w уст.пр . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.7. Погрешность регулирования
положения инструмента w рег . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.8. Погрешность измерения wизм . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.9. Погрешность смещения wсмещ . . . . . . . . . . . . . . . . . . . . . . . . .
7.4. Примеры расчета точности изготовления
станочных приспособлений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Глава 8
Расчет деталей приспособлений на прочность . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1. Условия, обеспечивающие целесообразную
конструкцию приспособлений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2. Расчет деталей приспособлений на прочность . . . . . . . . . . . . . . . . .
8.2.1. Основные уравнения прочности . . . . . . . . . . . . . . . . . . . . . . .
8.2.2. Варианты расчета деталей приспособлений
на прочность . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3. Примеры расчета отдельных деталей приспособлений
на прочность . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Глава 9
Приспособления для контроля точности деталей . . . . . . . . . . . . . . . . . . . . . . . . .
9.1. Основные понятия о метрологическом обеспечении
технологического процесса . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2. Основные методы и схемы контроля отклонений формы
и расположения поверхностей . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.1. Измерения отклонений от прямолинейности . . . . . . . . . . . . .
9.2.2. Измерения отклонений от плоскостности . . . . . . . . . . . . . . . .
9.2.3. Измерения отклонений от круглости . . . . . . . . . . . . . . . . . . .
9.2.4. Измерения отклонений от цилиндричности . . . . . . . . . . . . . .
9.2.5. Измерения отклонения профиля продольного сечения
цилиндрических поверхностей . . . . . . . . . . . . . . . . . . . . . . . .
9.2.6. Измерения отклонений от параллельности . . . . . . . . . . . . . .
9.3. Расчет точности контрольно(измерительных
приспособлений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.1. Общие положения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.2. Примеры проверочных расчетов
точности разрабатываемых КИП . . . . . . . . . . . . . . . . . . . . . . .
9.4. Разработка конструкции контрольно(измерительного
приспособления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4.1. Порядок проектирования КИП . . . . . . . . . . . . . . . . . . . . . . . .
9.4.2. Основные конструктивные элементы и устройства
контрольно(измерительных приспособлений . . . . . . . . . . . .
9.4.3. Центровые приспособления . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4.4. Примеры контрольно(измерительных приспособлений
для измерения отклонения от соосности
и радиального биения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4.5. Примеры контрольно(измерительных приспособлений
для измерения отклонения
от перпендикулярности и торцового биения . . . . . . . . . . . . .
172
173
173
174
174
174
191
191
193
193
196
199
207
207
210
210
214
218
227
231
233
240
240
243
249
249
250
257
259
267
Приложения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
308
Powered by TCPDF (www.tcpdf.org)
Оглавление
.
Зубарев Ю.М. Зубарев Ю.М. — Расчет и проектирование приспособлений в машиностроении
Юрий Михайлович ЗУБАРЕВ
РАСЧЕТ И ПРОЕКТИРОВАНИЕ
ПРИСПОСОБЛЕНИЙ В МАШИНОСТРОЕНИИ
Учебник
Çàâ. ðåäàêöèåé
èíæåíåðíî-òåõíè÷åñêîé ëèòåðàòóðû Ò. Ô. Ãàâðèëüåâà
Îòâåòñòâåííûé ðåäàêòîð Í. Â. ×åðåçîâà
Òåõíè÷åñêèé ðåäàêòîð Ñ. Â. Ìàêàðîâ
Êîððåêòîð Ä. Â. Ãàëàíèíà
Ïîäãîòîâêà èëëþñòðàöèé À. Ï. Ìàðêîâà
Âåðñòêà Å. Å. Åãîðîâà
Âûïóñêàþùèå Å. Ï. Êîðîëüêîâà, Ò. C. Ñèìîíîâà
ËÐ ¹ 065466 îò 21.10.97
Ãèãèåíè÷åñêèé ñåðòèôèêàò 78.01.07.953.Ï.007216.04.10
îò 21.04.2010 ã., âûäàí ÖÃÑÝÍ â ÑÏá
Èçäàòåëüñòâî «ËÀÍÜ»
lan@lanbook.ru; www.lanbook.com
192029, Ñàíêò-Ïåòåðáóðã, Îáùåñòâåííûé ïåð., 5.
Òåë./ôàêñ: (812) 412-29-35, 412-05-97, 412-92-72.
Áåñïëàòíûé çâîíîê ïî Ðîññèè: 8-800-700-40-71
Подписано в печать 16.02.15.
Бумага офсетная. Гарнитура Школьная. Формат 70´100 1/16.
Печать офсетная. Усл. п. л. 26,00. Тираж 700 экз.
Заказ №
.
Отпечатано в ОАО «Первая образцовая типография»,
филиал «Чеховский Печатный Двор»
в полном соответствии с качеством предоставленных материалов.
142300, Московская обл., г. Чехов, ул. Полиграфистов, д. 1.
Тел.: (495) 988=63=76, факс: 8 (496) 726=54=10.
Powered by TCPDF (www.tcpdf.org)
.