МИНОБРНАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Тверской государственный технический университет
Кафедра автоматизации технологических процессов
Отчет по лабораторной работе
«Синтез регуляторов в САР альтернативным методом
расширенных частотных характеристик»
по дисциплине
«Автоматизация технологических процессов и производств»
Выполнил:
студент группы: УТС-15.01
Конатыгин Д.В
Ильин Г.С
Проверил:
Марголис Б.И.
Тверь 2018
Содержание
1. Альтернативный метод расширенных частотных характеристик.…….....…3
2. Реализация альтернативного метода РЧХ в среде Matlab……………….......4
3. Результаты работы в программе………………………………………...….....5
4. Библиографический список.…………………………………………………...7
2
1. Метод расширенных частотных характеристик.
Метод РЧХ в стандартной постановке не дает настроек ПИД-регулятора, если заданная степень колебательности системы m больше, чем
степень колебательности объекта mоб . Для преодоления этого недостатка
необходимо перейти от набора параметров K0 , K1 , K 2 к набору
Tи , K1 ,
S Tд Tи , исключив коэффициент K 2 из расчетных формул.
Запишем уравнения ЛРЗ для системы с ПИД-регулятором в виде
2
2
2
K 0 a1 K 2 b;
a1 ( m 1 ) ; b= I( m 1 ) ;
где
(1)
K
c
K
d
,
c
2m
;
d=R
mI
.
1
1
1 2
Так как из формулы Tд / Tи K 0 K 2 K 12 0 ,25
S Tд / Tи K 0 K 2 K 12 , то K 2 SK 12 K 0 .(2)
Подставляя K 2 из (2) в уравнения (1), получим:
K 0 aK 12 K 0 b;
где
2
K
cK
K
d
,
1
1
0
Используя выражение Т и К 1 К0 , имеем
a a1 S ;
c c1 S .
(3)
K 1 Tи aK 1Tи b; d adTи2 bTи 1 cTи ;
K 0 aK 1Tи b;
откуда
(6)
K 1 d 1 cTи , K 1 d 1 cTи ,
K 1 сK 1Tи d ,
следовательно, ad bc Tи2 bTи d 0.
(7)
b b 2 4( ad bc )d
Находим корни уравнения (7): Tи
. (8)
2( ad bc )
Подставляя в выражение (8) a, b, c, d из (1) и (3) и учитывая, что
ad bc S( m 2 1 ) 2 R mI I( m 2 1 ) 2m S S( m 2 1 ) 2 R mI ,
получим
Tи
I( m 2 1 ) I 2 ( m 2 1 )2 2 4 S( m 2 1 ) 2 R mI R mI
2S( m 2 1 ) 2 R mI
I I 2 4 S ( R2 m 2 I 2 ) ( m 2 1 )
.
2S R mI
Отбрасывая
возможные
отрицательные
значения,
окончательное выражение для расчета Tи в виде
I I 2 4 S ( R2 m 2 I 2 ) ( m 2 1 )
Tи
, 0 < S 0 ,25.
2S R mI
С учетом коэффициентов c, d в (1), (3) из (6) получим
K1 R mI 1 2SmTи .
3
(9)
выводим
(10)
(11)
Обратный переход к набору K0 , K1 , K 2 с учетом ограничения ПИДрегулятора производится по формулам (11), K 0 K 1 Tи и K 2 SK 1Tи (12).
Для набора S Tд Tи в пространстве K0 , K1 , K 2 строятся кривые, все
точки которых удовлетворяют требованию S 0,25 . На каждой кривой
находится наилучшая по критерию качества точка, а затем из них выбирается
оптимальная.
2. Реализация альтернативного метода РЧХ в среде Matlab.
Код программы для нахождения настроек регуляторов альтернативным
методом РЧХ в среде Matlab приведен ниже:
clc
clear all
close
w = [0.1:0.1:10];S = [0.05:0.05:0.25];
tppz = 8;rz = 20;m = 0.5;
num = 2;den = [1 2 2];
Wob = tf(num,den)
r=roots(den);
Wreg = -polyval(den,(j-m)*w)./polyval(num,(j-m)*w);
R = real(Wreg);I = imag(Wreg);
M = [];r = [];G = [];K0=[];K1=[];K2=[];tpp = [];
for i = 1:1:length(S)
r = 0;tpp = 0;K0 = 0;K1 = 0;K2 = 0;
A1=2*w*S(i);A2=A1.*(R+m*I);
A3=I+sqrt(I.^2+4/(m^2+1)*S(i)*(R.^2-m^2*I.^2));
Tu=A3./A2;
A4=1-2*m*w.*Tu.*S(i);
A5=R-m*I;
for k = 1:1:length(R)
if imag(Tu(k)) == 0 &&imag(A5(k)/A4(k)) == 0
k1 = A5(k)/A4(k);k0 = k1/Tu(k); k2 = k1*Tu(k)*S(i);
if k0>0 && k1>0 && k2>0 && k0*k2/k1^2<=0.25
K0 = [K0 k0];K1 = [K1 k1];K2 = [K2 k2];
end;
end;
end;
figure(1)plot3(K1,K0,K2)hold onxlabel('K1');ylabel('K0');
zlabel('K2');title('ГрафикЛРЗ');grid on
for i = 1:1:length(K1)
WReg = tf([K2(i) K1(i) K0(i)],[1 0]);
4
W = Wob*WReg;
Wz = feedback(W,1,-1);
[t1,y1] = step(Wz);chars = stepinfo(Wz);
tpp(i) = chars.SettlingTime;r(i) = chars.Overshoot;
r = [r r(i)];tpp = [tpptpp(i)];
end;
[C,In] = min((r-rz)/rz+(tpp-tppz)/tppz);
WReg = tf([K2(In) K1(In) K0(In)],[1 0]);
W = Wob*WReg;
Wz = feedback(W,1,-1);
[y,t] = step(Wz);figure(2);plot(t,y,'g');hold on grid on
M = [M WReg];
G = [G C];
end;
title('Регуляторы');M[C,I] = min(C);
title('Оптимальный регулятор');
M(I)
W = feedback(M(I)*Wob,1,-1)
figure(2)[y,t] = step(W);plot(t,y,'r');xlabel('t'); ylabel('y(t)');
title('График переходного процесса замкнутой системы');
chars = stepinfo(W);
disp('Время переходного процесса:')tpp = chars.SettlingTime
disp('Перерегулирование:')r = chars.Overshoot
holdongridon
3. Результаты работы в программе
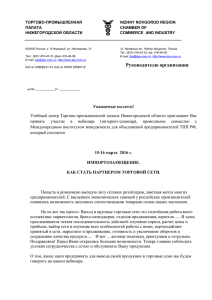
Результаты работы программы нахождения настроек ПИД-регулятора
альтернативным методом для объекта с колебательной передаточной
функцией и степени колебательности системы m=1,5 приведены ниже:
tppz = 8 rz= 20 m =1.5
2
Wob = ------------s^2 + 2 s + 2
M=
From input 1 to output:
2.987 s^2 + 10.66 s + 1.903
--------------------------s
From input 2 to output:
1.828 s^2 + 4.954 s + 1.343
--------------------------s
5
From input 3 to output:
1.419 s^2 + 3.415 s + 1.233
--------------------------s
From input 4 to output:
15.81 s^2 + 215.9 s + 589.7
--------------------------s
From input 5 to output:
16.72 s^2 + 243 s + 883.3
-------------------------s
Оптимальныйрегулятор
2.987 s^2 + 10.66 s + 1.903
--------------------------s
Время переходного процесса:
tpp = 1.6926
Перерегулирование:
r = 8.1137
T=
2.9866 1.8275 1.4186 15.8144 16.7177
10.6605 4.9536 3.4151 215.9310 243.0317
1.9026 1.3427 1.2332 589.6686 883.2606
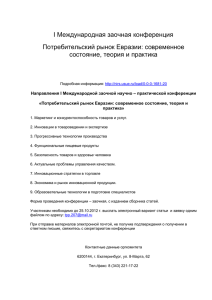
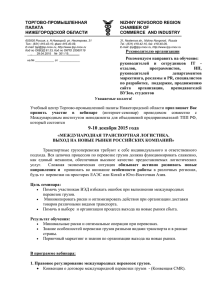
Рис.1. Семейство ЛРЗ при расчете настроек ПИД-регулятора
альтернативным методом РЧХ (чем отличается от РЧХ)
6
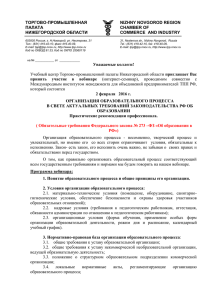
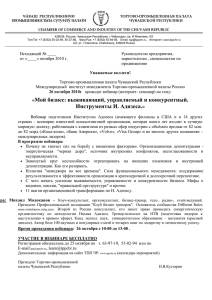
Рис. 2. Семейство переходных процессовпри расчете настроек
ПИД-регулятора альтернативным методом РЧХ
(Почему именно красный график выбирается)
4. Библиографический список
1. Калиниченко, В.С. Основы теории систем автоматического
регулирования и управления: учеб. пособие. Ч. 1. Тверь: ТГТУ, 2006. 196 с.
2. Калиниченко, В.С. Учебное пособие к лабораторным работам по
курсу «Теория автоматического управления». Тверь: ТГТУ, 2004. 52 с.
3. Комиссарчик, В.Ф. Автоматическое регулирование технологических
процессов: учебное пособие. Тверь: ТГТУ, 2001. 247с.
4. Инструкция пользователя программным комплексом «Моделирование в технических устройствах» (ПК «МВТУ», версия 3.0). М.: МГТУ
им. Н.Э. Баумана, 2002. 76 с.
5. Марголис,Б.И. Компьютерные
методы
анализа
и
синтезасистемавтоматическогорегулирования:учебноепособие
покурсу
"Компьютерные технологии в области автоматизации и управления"
длямагистров направления 550200 – "Автоматизация и управление". Тверь:
ТГТУ, 2006. 100 с.
6. Дьяконов, В.П. MATLAB 7.*/ R2006/ R2007: Самоучитель. М.: ДМК
Пресс, 2008. 768 с.
7