В.В. Давнис, В.И. Тинякова
ЭКОНОМЕТРИЧЕСКИЕ МЕТОДЫ
ПРОГНОЗИРОВАНИЯ
Учебное пособие для слушателей магистерских программ
Изд-во
2009
УДК 338.27:51
ББК 65.23
Д 13
Рецензенты:
Леденёва Т.М., д-р техн. наук, проф. каф. математических методов исследования операций Воронежского государственного университета;
Попова Е.В., д-р экон. наук, проф., зав. кафедрой информационных систем
Кубанского государственного аграрного университета.
Д 13 Давнис В.В. Эконометрические методы прогнозирования : учебное
пособие для слушателей магистерских программ / В.В. Давнис, В.И. Тинякова. – Воронеж: Изд-во ???, 2009. – ??? с.
ISBN
Основная цель учебного пособия – методическая поддержка практики проведения перспективных расчетов. Его отличительной особенностью является
содержательная постановка решаемых прогнозных задач. Ориентация на выполнение расчетов в MS Excel и STATISTICA обеспечивает более глубокое
понимание алгоритмов построения прогнозных моделей. Для закрепления
теоретического материала в пособии приводится тест, содержащий вопросы
по всему курсу.
Издание ориентировано на слушателей магистерских программ, преподавателей экономических вузов. Оно представляет интерес для студентов,
осуществляющих прогнозные расчеты при написании курсовых и выпускных
квалификационных работ.
УДК 338.27:51
ББК 65.23
ISBN
© Давнис В.В., 2009
© Тинякова В.И., 2009
2
ОГЛАВЛЕНИЕ
Предисловие…………………………………………………………
1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ПРОГНОЗИРОВАНИЯ…….
1.1. Сущность экономического прогнозирования…………….
1.2. Типология прогнозов………………………………………
1.3. Этапы прогнозирования……………………………………
2. ЭКСТРАПОЛЯЦИЯ ВРЕМЕННЫХ РЯДОВ………………….
2.1. Сущность экстраполяции ………………………………….
2.2. Типы роста и трендовые модели…………………………..
2.3. Метод наименьших квадратов ……………………………
2.4. Адекватность. Критерий Дарбина – Уотсона…………….
2.5. Критерии точности прогнозных расчетов………………..
3. РЕГРЕССИОННЫЙ АНАЛИЗ И ПРОГНОЗ………………….
3.1. Множественная регрессия……………………………….
3.1.1. Основные понятия регрессионного анализа……
3.1.2. Общий вид модели множественной регрессии…
3.1.3. Метод наименьших квадратов
в матричной форме………………………………..
3.1.4. Парная регрессия как частный случай
множественной…………………………………….
3.1.5. Мультиколлинеарность факторов………………..
3.1.6. Применение регрессионных моделей
в прогнозных расчетах…………………………….
3.2. Обобщенный регрессионный анализ…………………..
3.2.1. Обобщенная схема МНК………………………….
3.2.2. Метод взвешенных наименьших квадратов……..
3.2.3. Стандартные ошибки и их корректировка……….
3.2.4. Тесты на гетероскедастичность………………….
3.3. Регрессионные модели
с автокоррелированными остатками…………………..
3.3.1. Общая схема метода наименьших квадратов
в случае автокорреляции первого порядка………
3.3.2. Методы тестирования на автокорреляцию………
3.3.3. Методы оценивания параметра в моделях
с автокоррелированными остатками……………
3.3.4. Прогнозные расчеты
при автокоррелированных остатках………………
3.4. Регрессионные модели
с лаговыми переменными……………………………….
3.4.1. Общий вид моделей с лагами
в независимых переменных……………………….
3.4.2. Метод Койка……………………………………….
3.4.3. Распределенные лаги Алмон……………………...
3
4. АВТОРЕГРЕССИОННЫЕ ПРОЦЕССЫ
И ИХ МОДЕЛИ…………………………………………………...
4.1. Стационарность……………………………………………
4.2. Модель авторегрессии…………………………………….
4.3. Понятие интеграции……………………………………….
4.4. Модели скользящей средней………………………………
4.5. Авторегрессионные модели скользящей средней……….
4.6. Авторегрессионные интегрированные модели
скользящей средней………………………………………..
4.7. Коэффициент автокорреляции и
проверка его значимости…………………………………..
4.8. Определение порядка моделей ARMA ………………….
4.9. Построение моделей ARIMA ……………………………..
4.10. Проверка адекватности моделей ARMA …………………
4.11. Оценка точности прогнозных расчетов
по моделям ARIMA ………………………………………..
5. АДАПТИВНЫЕ МОДЕЛИ ПРОГНОЗИРОВАНИЯ……….
5.1. Специфика адаптивного моделирования
экономических процессов…………………………………
5.2. Полиномиальные модели………………………………….
5.3. Рекуррентный метод наименьших квадратов……………
5.4. Многофакторные адаптивные модели…………………….
5.5. Адаптивные многошаговые модели………………………
5.6. Выбор начальных значений и оптимальная
настройка параметров адаптации…………………………
6. ПРОГНОЗИРОВАНИЕ СЕЗОННЫХ КОЛЕБАНИЙ………
6.1. Моделирование периодических колебаний………………
6.2. Аддитивная и мультипликативная модели
временного ряда…………………………………………….
6.3. Моделирование сезонных колебаний
с помощью фиктивных переменных………………………
6.4. Адаптивные модели сезонных явлений…………………..
ТЕСТ………………………………………………………………..
КОМПЬЮТЕРНЫЙ ПРАКТИКУМ……………………………
БИБЛИОГРАФИЧЕСКИЙ СПИСОК …………………………….
ПРИЛОЖЕНИЯ……………………………………………………..
4
ПРЕДИСЛОВИЕ
Особое внимание к проблемам прогнозирования российская экономическая наука проявила после некоторого переосмысления новых условий хозяйствования. Пришло понимание того, что только прогноз как вероятностное представление о перспективах изучаемого объекта в будущем позволяет
менеджерам разных уровней увидеть основные ориентиры происходящих
перемен. Это дает им возможность принимать обоснованные решения, поскольку любое управленческое решение, в конечном счете, является своеобразной реакцией на прогнозное представление о будущем управляемого объекта. Кроме того, благодаря прогнозам менеджеры получают возможность
своевременно оценить опасность рисков и угроз, а, следовательно, принять
упреждающие меры и избежать «шок будущего».
В настоящее время круг задач прогнозирования существенно расширился как на макро-, так и микроуровне. На макроуровне прогноз стал средством
определения основных характеристик, приоритетов и направлений государственной экономической и социальной политики. Более того, в современных
условиях на федеральном и региональном уровнях прогнозные разработки
стали доминировать над плановыми. Об этом, в частности, свидетельствует
Федеральный Закон «О государственном прогнозировании и программах социально-экономического развития Российской Федерации» от 20 июля 1995
года, в котором конституционно закрепляется необходимость в научной разработке прогнозов. Фактически он ориентирует на усиление прогностической
направленности всех аналитических документов, разрабатываемых властными структурами.
Логическим следствием усиления роли прогнозирования в решении задач современного управления явилось повышение требований к подготовке
соответствующих специалистов. Обязательным элементом учебных программ становятся курсы, предусматривающие углубленное изучение основ
количественного обоснования управленческих решений. Условия неопределенности и риска, в которых разрабатываются и реализуются эти решения,
возводят методы прогнозирования в ранг наиболее важных методов обоснования.
В данном учебном пособии излагаются современные подходы к применению аппарата эконометрического моделирования в задачах экономического прогнозирования. Оно состоит из следующих самостоятельных блоков:
краткий конспект лекций; примеры прогнозных расчетов и комментарии к
ним; компьютерный практикум, включающий как решенные типовые задачи,
так и задания для самостоятельной работы; вопросы для контрольного тестирования по всему курсу. Охватывая таким образом все этапы учебного процесса, данное пособие предоставляет возможность максимально индивидуализировать процесс обучения, управляя процессом усвоения знаний.
Подготовка высококвалифицированного специалиста невозможна без
обучения его навыкам компьютерного моделирования и проведения вычис5
лительных экспериментов с прогнозными моделями. Учебное пособие как
раз и ориентировано на выработку и закрепление этих навыков. В него включены практические задания по всем теоретическим разделам. Чтобы облегчить понимание и ускорить овладение учебным материалом, в начале каждой
темы приведено подробное решение типового задания с содержательной интерпретацией результатов моделирования. Навыки, полученные при решении
типового задания, закрепляются в процессе самостоятельной работы над выполнением контрольного задания.
Все типовые задачи решены средствами табличного процессора Excel, а
выполнение некоторых из них продублировано с использованием системы
STATISTICA. Смысл такого подхода в том, что он развивает умение проводить сложные экономические расчеты, столь необходимое современному
специалисту для того, чтобы быть вполне конкурентоспособным на рынке
труда.
6
1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ПРОГНОЗИРОВАНИЯ
1.1. Сущность экономического прогнозирования
Попытки прогнозирования событий в природе и обществе предпринимались на всех этапах развития цивилизации. Еще в далекой древности возник
термин «прогностика», отражающий специальную область познания путем
прогнозирования. Известная книга великого древнегреческого врача и исследователя Гиппократа под названием «Прогностика» была написана более
двух тысячелетий назад. В ней прогнозирование понималось как искусство
предвидения будущего, которое базировалось как на приметах и наблюдениях за действительностью, так и на интуиции самого прорицателя. В ходе исторического развития искусство прогнозирования постепенно превращалось
в науку.
Прогнозирование в финансово-экономической сфере выросло из общего
направления прогностики, а особенно актуализировалось к концу ХIХ –
началу ХХ века. Во второй половине ХХ века прогнозирование развития социально-экономических систем стало массовым и популярным занятием.
Наибольшее значение приобрели прогнозы, связанные с оценкой будущих
объемов производства, финансовых результатов, а также прогнозы, отражающие возможные в будущем темпы роста или снижения товарооборота, объем и динамику денежной массы, величину потенциального спроса и товарного предложения, структуру доходов и расходов населения, производительность труда, уровень безработицы, индекс инфляции и курсы валют, другие
показатели экономической деятельности.
Известно, что не все прогнозные разработки являются успешными. Однако практика убедительно доказывает, что даже несбывшиеся прогнозы оказываются полезными. Само по себе описание возможных вариантов неблагоприятного развития ориентирует на выработку своевременных соответствующих решений, противодействующих реализации предсказанных вариантов.
Следует сразу отметить, что, в отличие от планирования, целью прогнозирования никогда не являлась буквальная реализация разработанных прогнозов в
действительности.
Совокупность прогнозов рассматривается как многовариантное представление о перспективах изменения исследуемого объекта в будущем при
определенных условиях и допущениях. Прогнозы, обеспечивая видение перспективы, позволяют своевременно обнаруживать риски и угрозы и принимать упреждающие меры для избежания отрицательных результатов. Поэтому прогностика является обязательным элементом управления финансовохозяйственной деятельностью экономических систем.
В 1995 г. за разработку и применение гипотезы рациональных ожиданий
в бизнес-прогнозировании Р. Лукасу-младшему (США) была присуждена
Нобелевская премия по экономике. Гипотеза признана ключевым моментом
современных экономических отношений, позволяющим находить эффективные оценки предполагаемых управленческих решений.
7
Во второй половине ХХ века своеобразным прорывом в практике административно-хозяйственного управления стали разработанные на десятилетия вперед целевые комплексные программы социально-экономического развития страны, а также прогнозы научно-технического прогресса. В настоящее время лидирующие западные компании вводят элементы поискового
экономического прогнозирования в систему своего стратегического управления, создают так называемые «офисы будущего», открывают специальные
подразделения по прогнозированию своего финансово-хозяйственного развития, проводят тренинги и деловые игры по распознаванию образов будущего.
Многие российские предприятия в настоящее время переходят к качественно новой системе управления, отвечающей требованиям рыночной экономики и содержащей в своей структуре прогнозные звенья. При этом широко используются современные компьютерные и информационные технологии, проводятся сложные многофакторные расчеты, перенимается передовой
западный опыт по прогнозному бюджетированию (оперативному прогнозированию денежных потоков). Результаты прогнозных исследований все в
большей мере становятся необходимой информационной поддержкой предприятия, обеспечивая его ценной опережающей информацией.
Роль прогнозирования в решении современных проблем экономики не
только возросла, но и изменилась. Являясь обязательным элементом процесса принятия решения и находясь долгое время в тесной взаимосвязи с планированием, прогнозирование оказалось в настоящее время доминантной составляющей этого процесса. Если раньше в управленческой деятельности,
обращенной в будущее, дескриптивная функция выполнялась прогностикой,
а нормативная – планированием, то в настоящее время, ориентируясь на методы регулирования, управление полностью отрицает директивность в реализации нормативного подхода. Однако пугающая неопределенность будущего и связанные с ней реальные риски принимаемых решений в социальной
и экономической сферах требуют указания хотя бы наиболее вероятных ориентиров, по которым целесообразно осуществлять движение в будущее. Разработка этих направлений официально закреплена за прогностикой в Федеральном Законе «О государственном прогнозировании и программах социально-экономического развития Российской Федерации», принятом 20 июля
1995 года.
Как и любая другая наука, прогностика имеет свой язык, который опирается на специфические термины и понятия. Рассмотрим основные из них.
Прогностика – наука, изучающая закономерности процесса прогнозирования.
Прогноз – вероятностное суждение о состоянии какого-либо объекта
(процесса или явления) в определенный момент в будущем и (или) альтернативных путях достижения каких-либо результатов.
Прогнозирование – это процесс формирования прогнозов развития объекта на основе анализа тенденций его развития.
Иногда в литературе можно встретить сопутствующие понятия, которыми не всегда правомерно заменяют понятие «прогнозирование». Такими со8
путствующими понятиями являются «предсказание» и «предвидение». В
прогностике уточняется смысл этих понятий следующим образом.
Предсказание – достоверное, основанное на логическом выводе суждение о состоянии какого-либо объекта (процесса или явления) в будущем.
Предвидение – опережающее отражение действительности, основанное
на познании законов развития объекта (процесса или явления).
Понятия «предсказание» и «прогнозирование» отличаются друг от друга
степенью достоверности оценок будущего, а «предвидение» – более широкое, родовое понятие, включающее в себя оба предыдущих. Следовательно,
суть различных видов процессов выработки информации о будущем можно
записать следующим образом: прогнозирование – «вероятно будет», предсказание – «будет», планирование – «должно быть».
Иногда понятие «прогностика» некоторые зарубежные авторы заменяют
понятием «футурология». Являясь в определенной мере эквивалентом термина «прогностика», понятие «футурология» значительно и необоснованно
расширяет предмет науки, делая его всеобъемлющим и включая в него все
аспекты проблемы будущего.
Субъект прогнозирования – организация, предприятие, учреждение или
отдельное лицо, осуществляющее разработку прогноза.
Объект прогнозирования – процессы, явления и события, на которые
направлена познавательная и практическая деятельность субъекта прогнозирования.
Прогнозная модель – модель объекта прогнозирования, исследования которой позволяют получать информацию о возможных состояниях объекта в
будущем и (или) путях и сроках их осуществления.
Система прогнозирования – система методов прогнозирования и средств
их реализации, функционирующая в соответствии с основными принципами
прогнозирования.
Метод прогнозирования – способ исследования объекта прогнозирования, направленный на разработку прогноза.
Методика прогнозирования – совокупность методов и правил разработки
прогнозов конкретных объектов.
Прием прогнозирования – одна или несколько математических или логических и других операций, направленных на получение конкретного результата в процессе разработки прогноза.
Прогнозный фон – совокупность внешних по отношению к объекту прогнозирования условий (факторов), существенных для решения задачи прогноза.
Этап прогноза – часть процесса разработки прогноза, характеризующаяся своими задачами, методами и результатами.
Вариант прогноза – один из прогнозов, входящий в группу возможных
прогнозов объекта прогнозирования.
Период упреждения прогноза – промежуток времени от настоящего в
будущее, на который разрабатывается прогноз.
9
Прогнозный горизонт – максимально возможный период упреждения
прогноза.
Период основания прогноза – промежуток времени, на базе которого
строится ретроспекция.
Обоснованность прогноза – степень соответствия методов и исходной
информации объекту, целям и задачам прогнозирования.
Ошибка прогноза – апостериорная величина отклонения прогноза от
действительного состояния объекта или путей и сроков его осуществления.
1.2. Типология прогнозов
Типология прогнозов строится в зависимости от различных критериев и
признаков. К числу наиболее важных из них относятся:
а) масштаб прогнозирования;
б) время упреждения;
в) характер объекта;
г) функция прогноза.
По масштабу прогнозирования выделяют:
1) макроэкономические и структурные прогнозы;
2) прогнозы развития хозяйственных комплексов (топливноэнергетического, агропромышленного, инвестиционного, производственной
инфраструктуры и др.);
3) прогнозы отраслевые и региональные;
4) прогнозы первичных звеньев хозяйственной системы: предприятий,
производственных объединений, а также отдельных производств.
По времени упреждения прогнозы подразделяются на:
оперативные – до одного года;
краткосрочные – от одного года до трех лет;
среднесрочные – от пяти до десяти лет;
долгосрочные – от десяти до двадцати лет;
дальнесрочные – свыше двадцати лет.
Перечисленные типы прогнозов отличаются друг от друга содержанием
и характером оценок исследуемых процессов.
Оперативные прогнозы основаны на предположении о том, что в прогнозируемом периоде не произойдет существенных изменений в исследуемом объекте как количественных, так и качественных. В них преобладает детально-количественные оценки ожидаемых событий.
Краткосрочные прогнозы предполагают только количественные изменения. Оценка событий, соответственно, дается количественной.
Средние и долгосрочные прогнозы исходят как из количественных, так и
качественных изменений в исследуемом объекте, причем в среднесрочных
прогнозах количественные изменения доминируют над качественными, в
долгосрочных – наоборот. В среднесрочных прогнозах оценка дается количественно-качественная, в долгосрочных – качественно-количественная.
10
Дальнесрочные прогнозы исходят только из качественных изменений,
причем речь идет об общих закономерностях исследуемого объекта. Форма
оценки прогнозируемых событий – качественная.
По функциональному признаку прогнозы подразделяются на два типа:
поисковый и нормативный (целевой).
Поисковый прогноз основан на условном продолжении в будущее тенденций развития исследуемого объекта в прошлом и настоящем. Его задача –
выяснить, как будет развиваться исследуемый объект при сохранении существующих тенденций. Так как такой подход основан на аналитических исследованиях, то он называется еще научным или исследовательским. В литературных источниках его часто называют генетическим, так как он предполагает развитие объекта в соответствии с его генетикой (наследственностью).
Поисковое прогнозирование может быть двух видов: традиционным
(экстраполятивным) и новаторским (альтернативным).
Традиционный метод предполагает, что развитие объекта происходит и
будет происходить гладко и непрерывно, т.е. будут сохранены все выявленные в прошлом тенденции. Если при этом прогноз не основан на анализе
влияния различных факторов на показатель, т.е. используется зависимость
показателя только от времени (тренд), то такой прогноз называется наивным.
В основном наивный подход используется в стабильных экономических системах для прогнозирования макроэкономических показателей (ВНП, ЧНП,
НД, инфляция, занятость и т.п.).
В случае многофакторных моделей прогноз не является наивным, но
здесь прогнозисты переносят тенденции, установившиеся в прошлом, на будущее, т.е. экстраполируют прошлое в будущее.
Новаторский подход, в отличие от традиционного, исходит из того, что
развитие объекта (например, экономики страны) не протекает гладко и
непрерывно, а происходит скачкообразно и прерывисто.
Новаторский подход называют также альтернативным, так как он предполагает, что существует множество вариантов будущего развития объекта.
Однако следует помнить, что и традиционный подход, исключая только
наивный прогноз, предполагает вариантность постановки (варианты отличаются значениями факторов). Новаторский подход предполагает разработку
вариантов, отличающихся по степени и характеру влияния управляющего органа на будущее развитие объекта прогнозирования. Например, прогнозируется рост производительности труда в зависимости от результатов ускорения
научно-технического прогресса. Понятно, что здесь возникают различные
варианты развития в зависимости от решений по перераспределению капитальных вложений между производственной, социальной и научнотехнической сферой.
Нормативный (целевой) прогноз реализует процесс прогнозирования от
будущего к настоящему, как бы «прогнозирование наоборот». При использовании этого подхода вначале устанавливаются желаемые конечные параметры развития (цели), а затем определяются необходимые для достижения цели
11
финансовые, материальные и трудовые ресурсы. Такое прогнозирование иногда называют нормативно-целевым.
Фактически, процедура нормативно-целевого прогнозирования схожа с
процессом планирования. Вначале, как правило, с помощью нормативов,
устанавливается желаемое конечное состояние развития объекта, а затем
прогнозисты определяют мероприятия, которые могут обеспечить достижение этого состояния, а также необходимые для этого финансовые, материальные и трудовые ресурсы.
1.3. Этапы прогнозирования
Основными этапами прогнозирования являются: ретроспекция, диагноз
и проспекция. Кроме основных, в любой прогнозной разработке, как правило, присутствуют предпрогнозные и постпрогнозные исследования. Учитывая весь комплекс исследований, необходимых для разработки прогноза, следует выделить семь следующих этапов.
Первый этап – этап предпрогнозной ориентации. В его рамках выполняется совокупность работ, предшествующих разработке заданий на прогноз и
включающих определение объекта, цели и задач прогнозирования, а также
периода основания и периода упреждения прогноза. Фактически, результатом этого этапа является первичное описание объекта прогнозирования.
Следующий этап – задание на прогноз. Результатом этого этапа является
документ, определяющий цели и задачи прогноза и регламентирующий порядок его разработки.
Фактически, эти два предпрогнозных этапа обеспечивают подготовку
первого из трех основных этапов – этап прогнозной ретроспекции. Содержанием ретроспекции является исследование истории развития объекта прогнозирования и прогнозного фона с целью получения их систематизированного
описания. В результате целенаправленных исследований уточняются источники информации, первоначальное описание объекта прогнозирования и
шкалы измерения его характеристик, принимается решение о методах сбора,
обработки, хранения информации, оптимизируется состав источников информации и окончательно формируется структура и состав характеристик
объекта.
На этапе прогнозного диагноза исследуется систематизированное описание объекта прогнозирования и прогнозного фона с целью выявления тенденций их развития и разработки (выбора) моделей и методов прогнозирования. Фактически, на этой стадии анализ объекта прогнозирования тесно переплетается с вопросами синтеза прогнозной модели, готовый вариант которой является финальным результатом диагноза.
Следующий этап – прогнозная проспекция – предусматривает разработку
прогнозов по результатам прогнозного диагноза. Другими словами, на этом
этапе проводятся вычислительные эксперименты с построенной моделью.
Полученные на предыдущем этапе прогнозные расчеты требуют проверки своей достоверности. Такая проверка осуществляется на этапе верифика12
ции прогноза. Результатом этого этапа является оценка точности и выводы,
гарантирующие надежность и обоснованность полученных прогнозов.
Завершаются прогнозные расчеты этапом «Корректировка прогноза».
Основное назначение этого этапа – уточнение прогнозных расчетов на основе их верификации и дополнительных данных.
2. ЭКСТРАПОЛЯЦИЯ ВРЕМЕННЫХ РЯДОВ
2.1. Сущность экстраполяции
Методы экстраполяции тенденций в развитии экономических процессов
являются, пожалуй, наиболее часто применяемыми среди всей совокупности
методов прогнозирования. В общем случае под экстраполяцией принято понимать распространение (возможно, с преобразованиями, осуществляемыми
посредством формальных методов) количественных характеристик какихлибо объектов или процессов, наблюдаемых в определенных временных,
пространственных либо других границах за эти границы. Формально это
означает, что значения некоторой функции определяются за границей области ее определения.
В экономических прогнозных расчетах использование экстраполяции
имеет в своей основе предположение о том, что рассматриваемый процесс
изменения прогнозируемой переменной представляет собой сочетание двух
составляющих: регулярной и случайной:
(2.1)
yt f b, t t .
Считается, что регулярная составляющая f b, t представляет собой
гладкую функцию от аргумента, в качестве которого обычно рассматривается
время. Функция определяется с точностью до неизвестного вектора параметров b , который остается неизменным на периоде упреждения прогноза. Эту
составляющую называют трендом, или уровнем детерминированной основы
процесса, или основной тенденцией. Под всеми этими терминами понимается
интуитивное представление о какой-то «очищенной» от случайных колебаний закономерности анализируемого процесса. Интуитивное – потому, что
для большинства экономических процессов нельзя однозначно отделить
тренд от случайной составляющей. Все зависит от того, какую цель преследует подобное разделение, и с какой точностью его хотят осуществить.
Случайная составляющая t обычно считается ненаблюдаемым некоррелированным случайным процессом с нулевым математическим ожиданием
и ограниченной дисперсией. Его оценки получаются только после построения модели и в дальнейшем используются для определения интервальных
характеристик точности прогноза.
13
Успех применения эктраполяционных методов прогнозирования в значительной степени зависит от выбора наилучшего в некотором смысле описания (вида) тренда.
2.2. Типы роста и трендовые модели
Одним из самых важных этапов при построении трендовых прогнозных
моделей является выбор вида функции, описывающей основную закономерность, лежащую в основе изменения временного ряда. Обычно для решения
этой задачи на этапе предварительной обработки данных исследуется механизм функционирования моделируемых процессов и уточняется их экономическая сущность. В процессе этих исследований пытаются выяснить:
1) является ли интересующий нас процесс монотонно возрастающим
или убывающим, стабильным или взрывчатым, имеет ли экстремум
(экстремумы), наблюдаются ли в его развитии сезонные явления;
2) ограничен ли сверху (снизу) каким-либо пределом, имеет ли асимптоты;
3) должна ли быть у функции, описывающей этот процесс, точка перегиба;
4) должна ли она (функция) обладать свойством симметрии;
5) имеет ли процесс явное ограничение своего развития во времени.
Если удается в результате этих исследований выявить какие-либо свойства моделируемого процесса, то этими свойствами стараются наделить
функцию, которая выбирается в качестве тренда (основной закономерности).
Такой подход позволяет строить содержательно интерпретируемые модели,
обеспечивающие более высокую достоверность прогнозных оценок, чем
формально построенные.
Отметим, что строгих предписаний по поводу последовательности действий при построении прогнозных моделей нет. У исследователя есть достаточно свободы при решении многих вопросов, поэтому всегда нужно помнить, что процесс построения модели – это не только наука, но и искусство.
Несмотря на сделанное замечание, в дальнейшем изложении будем придерживаться вполне определенной схемы выбора функции тренда, предусматривающей следующие действия:
1) сглаживание данных временного ряда (необязательно);
2) расчет абсолютных приростов;
3) определение типа роста путем анализа приростов или их производных характеристик;
4) уточнение типа роста с помощью содержательного анализа;
5) выбор из класса функций, описывающих данный тип роста, наилучшей.
Анализ приростов и их производных характеристик позволяет определить характер динамики прогнозируемого процесса (тип роста). Каждый тип
роста описывается соответствующими функциями. Опишем эти типы роста.
14
Постоянный рост. Он характеризуется постоянными или мало изменяющимися абсолютными приростами. Следовательно, если после сглаживания
временного ряда окажется, что вычисленные приросты yt примерно одинаковы для всех t , то есть полное основание строить модель, которая описывает этот тип роста. В качестве такой модели принято использовать линейную
функцию
(2.2)
yt b0 b1t.
Здесь b0 – теоретический (расчетный) уровень базисного года;
b1 – постоянный (ежегодный, ежемесячный) абсолютный прирост,
равный первой производной.
dy
.
dt
(2.3)
b1
b0 b1t
(2.4)
b1
Темп прироста
t
для линейной функции монотонно убывает при t .
Увеличивающийся рост. Для этого типа роста абсолютные приросты
сглаженного ряда либо линейно растут, либо темпы прироста остаются почти
неизменными. В первом случае мы имеем дело с параболической зависимостью
yt b0 b1t b2t 2 ,
(2.5)
у которой b2 0 , а предельная величина абсолютного прироста изменяется
линейно
dy
b1 2b2t.
dt
(2.6)
Во втором случае процесс описывается экспонентой
yt b0b1t
(2.7)
при b1 1 .
Темп предельного прироста определяется выражением
dy/dt b0b1t ln b1
ln b1.
t
yt
b0b1
(2.8)
Уменьшающийся рост. В этом случае прирост сглаженного ряда уменьшается по линейному или какому-либо другому закону. В качестве тренда
такого процесса может быть выбрана любая из следующих кривых:
Линейная логарифмическая
(2.9)
yt b0 b1 ln t.
Для нее величина абсолютного прироста в точке t
при t убывает.
dy b1
dt
t
(2.10)
15
Степенная зависимость
при b1 1 .
Абсолютный прирост
yt b0t b1
(2.11)
dy
b0b1t b1 1
dt
(2.12)
убывает при t .
Может использоваться также парабола (2.5), но с отрицательным коэффициентом b2 , так как для нее абсолютный прирост является убывающей
функцией t .
Часто для моделирования процессов этого типа применяют гиперболу
вида
yt b0
b1
,
t
(2.13)
для которой абсолютный прирост – убывающая функция
dy b1
dt t 2
(2.14)
и для которой существует предел сверху
lim yt b0 .
t
Встречаются также случаи, когда высокая точность аппроксимации достигается при использовании модифицированной экспоненты
yt b0 b1е t .
(2.15)
Модифицированная экспонента, как и гипербола, характеризуется быстро убывающим абсолютным приростом и наличием асимптоты
lim yt b0 ,
t
ограничивающий рост сверху.
Рост с качественным изменением динамических характеристик. При
моделировании этого типа процесса применяются точки перегиба, т.е. точки,
в которых вторая производная равна нулю. В случае если увеличивающийся
рост сменяется уменьшающимся ростом, то в качестве модели можно выбрать логарифмическую параболу
yt b0 b1 ln t b2 (ln t ) 2
(2.16)
yt b0 b1t b2t 2 b3t 3
(2.17)
с b2 0 или многочлен третьей степени
с b3 0 .
К этому классу функций относятся также кривая Гомперца и кривая
Перла – Рида (логистическая кривая). Уравнение кривой Гомперца имеет вид
t
yt ka b .
(2.18)
16
Логистическая кривая задается уравнением
yt
k
1 be
-at
.
(2.19)
Параметры всех кривых, кроме двух последних, оцениваются с помощью метода наименьших квадратов, который будет рассмотрен ниже.
После определения типа роста рекомендуется для его уточнения провести содержательный анализ, смысл которого можно проиллюстрировать следующим примером.
Пусть анализ приростов на ретроспективном участке показал, что ряд
динамики должен быть отнесен к процессам, которые характеризуются увеличивающимся ростом. Такой процесс, как было показано выше, хорошо
описывается с помощью экспоненциальной кривой. Однако первая половина
логистической кривой также представлена экспонентой. Поэтому остановить
свой выбор на увеличивающемся росте можно только в том случае, когда
удастся обосновать гипотезу об экспоненциальной тенденции ряда в будущем. Гипотеза об экспоненциальной тенденции принимается в том случае,
когда в результате содержательного анализа устанавливается, что исследуемый процесс в будущем не достигает состояния «насыщения».
Этап определения типа роста позволяет только ограничить число функций, приемлемых для описания данного временного ряда, сокращая число
возможных вариантов, но, кроме линейного случая, не дает однозначного ответа. Окончательный выбор функции тренда осуществляется следующим образом. С помощью метода наименьших квадратов, который рассматривается
ниже, строятся все функции из того ограниченного набора, который определен для установленного типа роста. Из построенных функций в качестве
тренда выбирается та, которая дает наименьшую среднюю квадратическую
ошибку
n
( yt yˆ t )
S t 1
n
2
,
(2.20)
где yt – фактические значения временного ряда;
ŷt – расчетные значения временного ряда;
n – длина временного ряда.
В предположении, что в перспективном периоде тенденции ретроспективного периода сохраняются, с помощью определенной таким образом
функции рассчитываются прогнозные значения. Расчет осуществляется путем подстановки в уравнение кривой значений времени t , соответствующих
периоду упреждения.
17
2.3. Метод наименьших квадратов (МНК)
Простейшую экстраполяционную модель, отражающую взаимосвязь
прогнозируемого показателя с некоторой переменной, формирующей динамику этого показателя, можно записать в виде
t 1, 2, , n ,
(2.21)
yt f( xt , b) t ,
где yt – значение t -го наблюдения прогнозируемого показателя;
xt – значение переменой, формирующей динамику показателя в момент
времени t (для трендовых моделей, являющихся частным случаем экстраполяционных, xt t );
b – вектор неизвестных параметров, оцениваемых по данным временного ряда;
f – функция, определяющая структуру трендовой модели (линейную,
степенную и т.п.);
t – ненаблюдаемая случайная величина, представляющая собой ту
часть вариации показателя yt , которая не объясняется соответствующими
изменениями переменной xt .
Чем ниже уровень вариаций около 0 возможных значений случайной величины , тем точнее модель отражает взаимодействие переменной x с прогнозируемым показателем y , т.е. параметры модели должны подбираться таким образом, чтобы минимизировать сумму квадратов отклонений (случайных составляющих )
n
n
t 1
t 1
b Arg min t 2 Arg min [ yt f( xt , b)]2 .
(2.22)
В общем случае поиск оптимальных параметров B сводится к решению нелинейной экстремальной задачи. Обычно рассматривают линейный случай
(2.23)
f( xt , b) b0 b1xt ,
который значительно упрощает решение этой задачи.
Рассмотрим применение метода наименьших квадратов к случаю построения линейного тренда. Для этого случая (2.22) перепишется в виде
n
b Arg min [ yt b0 b1 xt ]2 .
t 1
(2.24)
Применяя дифференциальное исчисление для минимизации (2.24) и
дифференцируя по b0 и b1 , получаем систему линейных уравнений
n
n
b
n
b
x
yt ,
1
t
0
t 1
t 1
n
n
n
b x b x 2 x y .
0 t 1 t 1 t 1 t t 1 t t
(2.25)
Разделив левую и правую части этой системы на число наблюдений n и
произведя замену:
18
x
1 n
xt ;
n t 1
y
1 n
yt ;
n t 1
xy
1 n
xt yt ;
n t 1
x2
1 n 2
xt ,
n t 1
перепишем систему (2.25) в виде
b0 b1 x y ,
b0 x b1 x 2 xy.
(2.26)
Решая линейную систему (2.26) с помощью замены
b0 y b1x ,
получаем оценки коэффициентов линейной трендовой модели в виде
xy x y
;
bˆ1
2
2
x x
bˆ0 y bˆ1x .
(2.27)
В случае, когда в качестве тренда выбрана нелинейная функция, возникают некоторые проблемы построения таких функций с помощью МНК. Рассмотрим все варианты, которые могут иметь место в таких случаях.
Нелинейные модели принято делить на три класса: нелинейные по независимой переменной; нелинейные по оцениваемым параметрам, но приводящиеся путем преобразования к линейному виду; нелинейные по оцениваемым параметрам; не приводящиеся к линейному виду.
Нелинейные по независимой переменной:
парабола y b0 b1x b2 x 2 ;
полином третьей степени y b0 b1 x b2 x 2 b3 x 3 ;
b
равносторонняя гипербола y b0 1 .
Нелинейные по оцениваемым параметрам:
x
b
степенная y b0 x 1 e ;
x
показательная y b0 b1 e ;
b b x
экспоненциальная y e 0 1
.
Коэффициенты моделей первого класса после замены переменных рассчитываются с помощью метода наименьших квадратов. Построение моделей второго класса требует предварительного их приведения к линейному виду путем
логарифмирования
ln y ln b0 b1 ln x ;
ln y ln b0 x ln b1 ;
ln y b0 b1x .
После построения с помощью метода наименьших квадратов преобразованных моделей коэффициенты исходных моделей в случае необходимости
получаются путем потенцирования.
19
Модели третьего класса (например, логистическая модель Перла – Рида и кривая Гомперца) не приводятся к линейному виду и, следовательно,
не могут быть построены с помощью МНК.
2.4. Адекватность. Критерий Дарбина – Уотсона
Проверка адекватности трендовых моделей реальному процессу строится на основе анализа случайной компоненты. В расчетах случайная компонента заменяется остатками, представляющими собой разность фактических
и расчетных значений
(2.28)
еt yt yˆt .
Принято считать, что модель адекватна описываемому процессу, если
значения остаточной компоненты удовлетворяют свойствам случайности, независимости и подчиняются нормальному закону распределения.
При правильном выборе тренда отклонения от него будут носить случайный характер. В случае если вид функции выбран неудачно, то последовательные значения остатков могут не обладать свойством независимости,
т.е. они могут коррелировать между собой. В этом случае говорят, что имеет
место автокорреляция ошибок.
Существует несколько приемов обнаружения автокорреляции. Наиболее
распространенным является критерий Дарбина – Уотсона. Этот критерий
связан с гипотезой о существовании автокорреляции первого порядка. Его
значения определяются по формуле
n
d
(еt еt 1 )
2
t 2
.
n 2
еt
t 1
(2.29)
Для понимания смысла этой формулы преобразуем ее, сделав предварительn
n
t 1
t 2
ное допущение, положив et2 et21 . Непосредственное преобразование
формулы осуществляется следующим образом:
n
et et 1
2
t 2
n 2
et
t 1
n 2
n 2
n 2
t 2
n
et e1 et en 2 et et 1
t 1
2
t 1
2
t 2
n 2
et
t 1
n 2
n
et et 1 2 et et 1
t 2
t 2
n 2
et
t 1
n
et et 1 2
e1 en2
t
2
21 n
.
n
2
2
et
e
t 1 t
t 1
20
n
При достаточно большом n сумма из n слагаемых et2 значительно
t 1
превосходит сумму из двух слагаемых (е12 еn2 ) и поэтому отношением этих
величин можно пренебречь. Кроме того, отношение в квадратных скобках в
n
силу того, что et 0 , можно считать коэффициентном корреляции r межt 1
ду et и et 1 . Таким образом, критерий Дарбина – Уотсона записывается в
виде
(2.30)
d 2 1 re e .
t t 1
Полученное представление критерия позволяет сделать вывод, что статистика Дарбина – Уотсона связывает с выборочным коэффициентом корреляции
ret et 1 . Таким образом, 0 d 4 , и значение критерия может указывать на
наличие или отсутствие автокорреляции в остатках. Причем, если re e 0 ,
t t 1
d
2
d
0 ; если
то
. Если ret et 1 1 (положительная автокорреляция), то
ret et 1 1 (отрицательная автокорреляция), то d 4 .
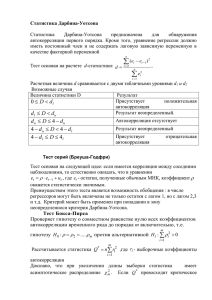
Статистически значимая уверенность в наличии или отсутствии автокорреляции определяется с помощью таблицы критических точек распределения Дарбина – Уотсона. Таблица позволяет по заданному уровню значимости , числу наблюдений n и количеству переменных в модели m определить два значения: d L – нижняя граница и dU – верхняя граница.
Таким образом, алгоритм проверки автокоррелированности остатков по
критерию Дарбина – Уотсона следующий:
1) Построение трендовой зависимости с помощью обычного МНК
yˆt f t ;
2) Вычисление остатков
et yt yˆt
для каждого наблюдения t ( t 1, 2, , n );
3) Расчет статистики Дарбина – Уотсона;
4) По таблице критических точек определяются два числа d L и dU , и
делается вывод в соответствии со следующим правилом:
0 d d L – существует положительная автокорреляция;
d L d dU – решение о наличии или отсутствии автокорреляции не
принимается;
dU d 4 dU – автокорреляция отсутствует;
4 dU d 4 d L – решение о наличии или отсутствии автокорреляции
не принимается;
4 d L d 4 – существует отрицательная автокорреляция.
21
Проверка гипотезы
H 0 : автокорреляция равна нулю
хорошо иллюстрируется графической схемой на рис. 2.1.
d
dL
0
dU
4 dU 4 d L
2
4
Область отклонения H 0
Область
принятия гипотезы
Область отклонения H 0
Положительная
автокорреляция
Область
неопределенности
Отрицательная
автокорреляция
Рис. 2.1. Графическая схема проверки автокоррелированности остатков
2.5. Критерии точности прогнозных расчетов
Рассчитанные по уравнению тренда оценки принято называть точечными, так как для каждого момента времени определяется только одно значение
прогнозируемого показателя. Вероятность того, что реальное значение в будущем совпадет с прогнозной оценкой, невелика. Поэтому в дополнение к точечному прогнозу определяют границы возможного изменения прогнозируемого показателя, т.е., фактически вычисляют интервальный прогноз. Несовпадение фактических значений с точечным прогнозом может быть вызвано:
1) субъективной ошибкой при выборе вида кривой;
2) погрешностью оценивания параметров кривых;
3) погрешностью, связанной с отклонением отдельных наблюдений от
кривой тренда.
Погрешность, порождаемая вторым и третьим источником, может быть
отражена в виде доверительного интервала прогнозного значения
(2.31)
yˆ n l t S р ,
где yˆ n l – точечный прогноз на момент t l ;
t – значение t-статистики Стьюдента;
S р – средняя квадратическая ошибка прогноза;
n – длина временного ряда;
l – период упреждения.
Для линейной модели тренда дисперсия S р2 может быть представлена в
виде
S 2р
S y2
n
(t
S y2 n 1
t )2
(t t )
2
S y2 ,
(2.32)
t 1
22
где S y2 – дисперсия отклонений фактических наблюдений от расчетных;
t1 – время упреждения, для которого делается экстраполяция, t1 n l ;
t – порядковый номер уровней ряда, t 1, 2, , n ;
t – порядковый номер уровня, стоящего в середине ряда.
Используя формулу (2.32), доверительный интервал можно представить
в виде
1 (t1 t ) 2
1 n
.
n
2
(t t )
yˆ n l t S y
(2.33)
t 1
Доверительные интервалы прогнозов, полученные с использованием нелинейных моделей (экспоненциальной, степенной и т.д.), определяются аналогичным образом. Отличие состоит только в том, что как при вычислении
параметров кривой, так и при вычислении средней квадратической ошибки
используются преобразованные значения уровней временного ряда (например, логарифмы).
Важнейшими характеристиками качества прогнозной модели являются
показатели ее точности. Показатели рассчитываются на основе ошибок прогноза. Ошибка прогноза – величина, характеризующая расхождение между
фактическим и расчетным показателем. Она определяется по формуле
(2.34)
t yt yˆt ,
где yt – фактическое значение показателя;
ŷt – прогнозное значение показателя.
Наряду с ошибками (2.34) широко используются относительные ошибки
прогноза, выраженные в процентах относительно фактических значений показателей
t
yˆ t yt
100.
yt
(2.35)
О точности модели нельзя сформировать правильное представление по
отдельным прогнозным ошибкам, поэтому, кроме мгновенных характеристик
(ошибка, относительная ошибка), используются средние характеристики по
модулю (абсолютные, относительные)
n
yt yˆ t
t 1
,
n
1 n y yˆ t
t
100.
n t 1 yt
(2.36)
(2.37)
При проведении сравнительной оценки моделей может также использоваться среднеквадратическая ошибка прогноза
23
n
S
( yt yˆ t )
t 1
n
2
.
(2.38)
Если приведенные характеристики вычисляются для перспективного периода, то их вычисление возможно только в том случае, когда станут известны фактические значения этого периода.
Иногда в качестве меры качества прогнозной модели может стать –
относительное число случаев, когда фактическое значение охватывалось интервальным прогнозом
р
,
рq
(2.39)
где p – число прогнозов, подтвержденных фактическими данными;
q – число прогнозов, не подтвержденных фактическими данными.
В случае, когда все прогнозы подтверждаются ( q 0 ), то 1 . Если ни
один прогноз не подтверждается ( p 0 ), то 0 .
Коэффициент можно использовать для сопоставления по точности
разных прогнозных моделей. Такое сопоставление корректно при условии,
что для всех сопоставляемых моделей доверительные вероятности приняты
одинаковыми.
3. РЕГРЕССИОННЫЙ АНАЛИЗ И ПРОГНОЗ
3.1. Множественная регрессия
3.1.1. Основные понятия регрессионного анализа
Рассмотренные в предыдущем разделе экстраполяционные модели иногда называют наивными в силу того, что в них не учитывается взаимодействие экономических показателей друг с другом. В реальности значение любого экономического показателя зависит от такого большого количества
факторов, которое невозможно учесть при построении прогнозных моделей.
Но в этом и нет необходимости, поскольку лишь ограниченное количество
таких факторов существенно воздействует на моделируемый показатель. Доля влияния остальных столь незначительна, что их воздействием можно пренебречь без особого искажения реальной зависимости. Модели с ограниченным числом доминирующих факторов создают реальные предпосылки для их
применения в анализе, прогнозировании и управлении в различных экономических ситуациях.
Экономистами было исследовано достаточно большое число устоявшихся связей между различными показателями, которые пытаются использовать
в задачах обоснования социально-экономических прогнозов. Однако даже
24
устоявшиеся зависимости в одних и тех же ситуациях могут проявляться поразному. В этой неоднозначности и состоит принципиальное отличие зависимостей между экономическими показателями от строгих функциональных
зависимостей, используемых в естественных науках. Подобная неоднозначность объясняется целым рядом причин, в частности, тем, что, во-первых,
при анализе влияние одной переменной на другую не учитывается ряд других факторов; во-вторых, это влияние может быть не прямым, а проявляться
через цепочку других факторов; в-третьих, многие такие воздействия носят
случайный характер и т.д. Поэтому в экономике принято рассматривать не
функциональные, а статистические (корреляционные и регрессионные) зависимости.
Корреляционная зависимость устанавливается в тех случаях, когда переменные x и y считаются равноценными в том смысле, что они не подразделяются на независимую (причину) и зависимую (следствие). При решении
прогнозных задач самостоятельной роли корреляционный анализ не играет и
чаще всего используется как инструмент отбора значимых факторов.
Регрессионная зависимость определяется в тех случаях, когда одна из
переменных x классифицируется как независимая (объясняющая), а другая
y – как зависимая (объясняемая). Изменение первой из них служит причиной для изменения второй. Например, рост доходов ведет к увеличению потребления, рост цены – к снижению спроса, снижение процентной ставки – к
увеличению инвестиций и т.д. Однако такая зависимость является неоднозначной в том смысле, что каждому конкретному значению объясняющей
переменной соответствует не одно, а множество значений объясняемой переменной из некоторой области. Другими словами, в данном случае каждому
конкретному значению объясняющей переменной соответствует некоторое
вероятностное распределение зависимой переменной. Поэтому целесообразно строить прогнозы с учетом того, что объясняющая переменная влияет на
зависимую переменную «в среднем». Зависимость такого типа принято записывать в виде соотношения
M y x f x ,
(3.1)
называемого функцией регрессии y на x . Таким образом, под регрессией понимается функциональная зависимость между объясняющей переменной и
условным математическим ожиданием (средним значением) зависимой переменной.
Пытаясь отразить тот факт, что реальные зависимости не всегда совпадают с ее условным математическим ожиданием и могут быть различными
при одном и том же значении объясняющей переменной, в рассмотрение вводится случайная составляющая , с помощью которой зависимость между
объясняющей и объясняемой переменной записывается в виде соотношения
y M y x ,
(3.2)
называемого регрессионной моделью (уравнением).
25
3.1.2. Общий вид модели множественной регрессии
Многофакторные регрессионные модели дают хороший результат только в тех случаях, когда удается выделить наиболее значимые факторы, а влиянием других факторов, воздействующих на моделируемый процесс, можно
пренебречь. Такие ситуации в экономике, как правило, создаются искусственно, путем абстрагирования от условий реальности, для изучения эффектов влияния отдельных факторов. В действительности, не удается контролировать поведение всех экономических переменных, т.е. фактически не
удается обеспечить равенство всех прочих условий для выяснения влияния
исследуемой группы факторов. Поэтому, чтобы учесть и все прочие условия
в модель, кроме факторов, вводится случайная составляющая , позволяющая многофакторную регрессию записать в виде
(3.3)
y f b, x ,
где y – моделируемый показатель (зависимая переменная);
x – вектор-строка независимых переменных;
b – вектор-столбец оцениваемых параметров;
f – функция, определяющая структуру регрессионной модели;
– ненаблюдаемая случайная составляющая, характеризующая ту долю
вариации зависимой переменной, которая не объясняется соответствующими
изменениями независимых переменных.
В экономических исследованиях чаще всего используется линейная
форма зависимости
(3.4)
yi b0 b1 x1i b2 x2i . . . bm xmi i , i 1, n
или нелинейные формы
m
e i ;
степенная: yi b0 x1bi1 x2b2i . . . xmi
экспонента: yi e
b0 b1x1i b2 x2 i . . . bm xmi i
;
x
x
x
показательная: yi b0 b1 1i b2 2 i bmm e i ;
гипербола: yi
1
,
b0 b1 x1i b2 x2i . . . bm xmi i
легко приводимые к линейным путем логарифмирования или замены переменных. Поэтому ниже будут рассматриваться методы построения только
линейных моделей.
3.1.3. Метод наименьших квадратов в матричной форме
Для оценки параметров линейного уравнения множественной регрессии
применяется метод наименьших квадратов. Скалярный вариант этого метода
позволяет получать оценки параметров bˆ0 , bˆ1 , , bˆm путем решения системы
нормальных уравнений
26
nb0 b1 xi1 b2 xi 2 bm xim yi ,
2
b0 x1i b1 xi1 b2 xi1 xi 2 bm xi1 xim yi xi1 ,
b x b x x b x x b
2
2 i 2 im
m xim yi xim ,
0 im 1 i1 im
(3.5)
которая получается путем дифференцирования суммы квадратов отклонений
2
(3.6)
S b0 , b1 ,, bm yi b0 b1 xi1 b2 xi 2 bm xim .
Современный подход к изложению регрессионного анализа основан на
матричной алгебре. Поэтому ниже будет рассмотрен матричный вариант
МНК.
Чтобы понять переход от скалярного представления регрессионной модели к матричному, запишем регрессионное уравнение для каждого i -го
( i 1, n ) наблюдения в виде следующей системы:
y1 b0 b1 x11 bm x1m 1 ,
y b b x b x ,
2
0
1 21
m 2m
2
(3.7)
yn b0 b1 xn1 bm xnm n .
Для удобства будем считать, что коэффициент b0 регрессионного урав-
нения в системе (4.7) умножен на специально введенную искусственную переменную x0 1. С учетом введенной переменной эта система может быть
записана следующим образом:
y1 1 x11 x1m b0 1
y 1 x
21 x2 m b1 2
2
.
yn 1 xn1 xnm bm n
Введя обозначения
y1
y
y 2 ;
yn
1 x11 x1m
1 x
x2 m
21
;
X
1 xn1 xnm
b0
b
b 1 ;
bm
(3.8)
1
ε 2 ,
n
перепишем (4.8) в компактной матричной форме
y Xb ε .
(3.9)
Сумма квадратов отклонений МНК для (4.9) записывается следующим образом:
27
1
n 2
2
i 1 2 n εε y Xb y Xb min . (3.10)
i 1
n
Выполнив умножение в (3.10)
y Xb y Xb yy (Xb )y yXb (Xb )Xb
y y bXy bXy bXXb y y 2bXy bXXb
и продифференцировав по вектору b результат перемножения
2 Xy 2 XXb ,
b
получаем систему уравнений в матричной форме
(3.11)
XXb Xy ,
решение которой позволяет записать выражение для оценки вектора параметров регрессионного уравнения следующим образом:
1
(3.12)
bˆ XX Xy .
Если выполняются гипотезы, лежащие в основе модели множественной
регрессии:
1) y Xb ε – спецификация модели;
2) X –детерминированная матрица, имеющая максимальный ранг m 1 ;
0
0
3a) Eε 0 ;
0
2 0
0 2
2
3b) V Eεε I
0
0
0
0
,
2
то оценки (3.12) обладают рядом полезных свойств, описание которых приводится ниже.
Прежде всего, покажем, что математическое ожидание оценок МНК
равно b . Для этого представим оценку в следующем виде:
bˆ XX 1 XXb ε XX 1 XX b XX 1 Xεε
b XX1 Xε .
(3.13)
Приведенное представление совместно с гипотезой 3а) позволяет записать
(3.14)
E(bˆ ) b .
Данное свойство принято назвать несмещенностью оценок МНК. Несмещенность – важное свойство, но его недостаточно для полного описания
качественных характеристик вычисляемых по МНК оценок.
Второй качественной характеристикой является стандартная ошибка.
Для ее получения вычислим ковариационную матрицу оценки b̂ , т.е. мате28
матическое ожидание произведения отклонений оценки вектора параметров
от своего математического ожидания
(3.15)
E{[bˆ E(bˆ )][bˆ E(b)]} E{[bˆ b][bˆ b]} .
Так как из (4.13) следует bˆ b XX 1 Xε , то, произведя замену, получаем
E{[bˆ b][bˆ b]} E{[(XX) 1 Xε][εX( XX) 1 ]}
E{XX 1 XXεε XX 1} 2IXX 1 2 XX 1 .
(3.16)
Дисперсия 2 , фигурирующая в (4.16), обычно неизвестна и поэтому ее
величина оценивается по выборочным наблюдениям, т.е. принимается равной
ˆ 2
ee
,
n m 1
(3.17)
где е – вектор остатков, вычисление которых, в отличие от случайных составляющих , становится возможным после построения регрессионного
уравнения, так как e y Xbˆ . Таким образом, ковариационная матрица
векторной оценки имеет вид
1
Sb2ˆ ˆ 2 XX .
(3.18)
Квадратные корни из элементов главной диагонали матрицы (3.18) принято называть стандартными ошибками коэффициентов регрессии. Эти
ошибки обозначают Sbˆ , Sbˆ , , , Sbˆ . По теореме Гаусса – Маркова оценки
0
1
m
МНК имеют наименьшие стандартные ошибки в классе линейных (по y ) несмещенных оценок.
С помощью стандартных ошибок определяется уровень надежности вычисленных оценок коэффициентов регрессии: проверяются гипотезы относительно значимости оценок коэффициентов регрессии, строятся доверительные интервалы. Другими словами, с их помощью устанавливается надежность построенной модели.
Иногда построение уравнения множественной регрессии начинается с
построения регрессии в стандартизованном масштабе
(3.19)
t y 1t x1 2t x2 mt xm ,
где
ty
yy
y
x xi
, t xi i
– стандартизованные переменные;
xi
i – стандартизованные коэффициенты регрессии, которые принято
называть бета-коэффициентами. Они получаются как решение системы нормальных уравнений в стандартизованном масштабе
29
1 2 rx2 x1 3rx3 x1 m rxm x1 ryx1 ,
1rx2 x1 2 3rx2 x3 m rxm x2 ryx2 ,
r
1 xm x1 2 rxm x2 3rxm x3 m ryxm .
(3.20)
Коэффициентами системы (20) являются парные коэффициенты корреляции. Интересна содержательная интерпретация - коэффициентов. В отличие от коэффициентов регрессии bi , которые зависят от масштаба измерений зависимой и независимых переменных, эти коэффициенты свободны от
такой зависимости и поэтому могут использоваться для ранжирования факторов по степени их влияния на моделируемый показатель. Связь коэффициентов множественной регрессии bi со стандартизованными коэффициентами
i определяется соотношением
bi i
y
,
xi
(3.21)
что позволяет осуществить переход от стандартизованного уравнения к
обычному, свободный член которого вычисляется через среднее значение по
формуле
(3.22)
bˆ0 y bˆ1x1 bˆ2 x2 bˆm xm .
В случае необходимости (например, для ранжирования факторов по степени воздействия на моделируемый показатель) можно, не прибегая к построению стандартизованного уравнения, определить - коэффициенты по
коэффициентам регрессии bi
i bi
xi
y
.
(3.23)
Кроме того, - коэффициенты могут использоваться для расчета множественного коэффициента корреляции
R yx1 x 2 ,, x m
n
i ryx
i 1
i
,
(3.24)
показывающего тесноту линейной связи независимых переменных, включенных в модель, с зависимой переменной.
В общем случае теснота совместного влияния факторов на моделируемый показатель оценивается индексом корреляции
R yx1 x2 ,, xm
y yˆ 2
,
1
2
y
y
(3.25)
значения которого для линейной модели совпадает с множественным коэффициентом корреляции.
30
Качество построенной модели в целом удобно оценивать с помощью коэффициента множественной детерминации, определяемого как квадрат индекса множественной корреляции, умноженного на 100
2
D R yx
100
1 x 2 ,, x m
(3.26)
и показывающего на сколько процентов изменение зависимой переменной
объясняется соответствующими изменениями независимых переменных.
Для этих же целей, когда особое внимание обращается на статистическую значимость, используется скорректированный коэффициент множественной детерминации, рассчитываемый через скорректированный на число степеней свободы множественный индекс корреляции по формуле
(n 1)
D Rˆ 2 100 1 (1 R 2 )
100 .
(
n
m
1
)
(3.27)
Значимость уравнения множественной регрессии в целом оценивается с
помощью дисперсионного отношения Фишера (F-критерия)
( yˆ y ) 2 / m
R2 n m 1
.
(3.28)
F
2
2
m
ˆ
( y y) / (n m 1) 1 R
В числители критерия (3.28) стоит сумма квадратов отклонений, обусловленная регрессией («объясненная» или «факторная»), деленная на число
степеней свободы m , а в знаменателе – остаточная сумма квадратов отклонений, деленная на ( n m 1 ) (остаточная дисперсия).
Если F Fтабл , то построенная модель считается адекватной. Fтабл –
это максимально возможное значение дисперсионного отношения Фишера
при данных степенях свободы и доверительном уровне (см. Приложение).
Частный F-критерий позволяет оценить статистическую значимость
каждого из факторов, включенного в модель. Для фактора xi значение частного F-критерия определяется по формуле
Fxi
2
2
R yx
R yx
x
,
,
x
1 2
m
1 ,, xi 1 xi 1,, xm
1
2
R yx
1 x 2 ,, x m
n m 1
.
1
(3.29)
Статистическая значимость каждого коэффициента регрессии оценивается также с помощью t-критерия Стьюдента
tbi
bi
Fxi ,
Sbi
(3.30)
где Sbi – средняя квадратическая ошибка коэффициента регрессии, определяемая по формуле
Sbi
2
y 1 R yx
1 ,, x m
xi
1 Rx2 x ,, x
i 1
m
1
.
n m 1
(3.31)
31
Коэффициенты регрессии линейного уравнения интерпретируется как
коэффициенты абсолютного роста. С их помощью можно рассчитать средние
коэффициенты эластичности, которые определяются по формуле
E yxi bi
xi
.
y
(3.32)
3.1.4. Парная регрессия как частный случай множественной
В практике прогнозных расчетов встречаются ситуации, когда находящиеся в распоряжении прогнозиста данные позволяют строить только однофакторные (парные) регрессионные модели. Так, если вспомнить, что применение построенной модели в прогнозных расчетах предполагает наличие
значений независимых переменных на упреждающем отрезке, то становится
понятным, почему иногда отказываются от построения сложных многофакторных моделей.
Процедура построения однофакторных моделей значительно проще, поэтому логикой изложения материала по регрессионному анализу, принятой в
учебных пособиях, предусматривается рассмотрение сначала парной, а затем
как ее обобщение – множественной регрессии. Причем, теория парной регрессии излагается в скалярном варианте, а множественной – в матричном.
Здесь же, преследуя цель единообразия представления материала, парная регрессия рассматривается как частный случай множественной.
Используя обозначения
y1
y
y 2;
yn
1 x1
1 x
2
;
X
1 xn
1
2,
n
b
b 0;
b1
систему нормальных уравнений для рассматриваемого случая в развернутом
виде можно записать следующим образом:
n
n
x
i
i 1
n y
x
i b0 i
i 1
ni 1
n
xi2 b1 xi y
i 1
i 1
n
.
(3.33)
В общем виде решение этой системы вне зависимости от ее размера задается формулой (3.12). Однако больший интерес представляет решение, записанное в явном виде. Для системы (3.33), имеющей размеры 2 2 , этот замысел легко реализуется. Сначала вычислим определитель
n
n
n
xi
i 1
xi
n
n x xi
2
i 1
i 1
xi
i 1
n
n
2
i
2
(3.34)
i 1
32
а затем, используя полученное выражение, найдем обратную матрицу
XX 1
n 2
xi
1
i 1n
2
n
n
n xi2 xi xi
i 1 i 1
i 1
xi
i 1
.
n
n
(3.35)
Тогда оценки коэффициентов парной регрессии могут быть записаны в виде
n 2
xi
bˆ0
1
i 1
n
bˆ
2
n 2 n
1
n xi xi i 1xi
i 1
i 1
n n
xi yi
i 1 i 1
n
n xi yi
i 1
n
n
n 2 n
xi yi xi xi yi
i 1 i 1
i 1 i 1
2
n 2 n
n xi xi
i 1
i 1
.
n
n
n
x
y
n
x
y
i
i
i
i
i 1
i 1 i 1
2
n 2 n
n
x
x
i
i
i 1
i 1
(3.36)
Если числитель и знаменатель каждой компоненты полученного вектора
разделить на n 2 , то оценки коэффициентов могут быть записаны в привычном виде, через средние величины
x 2 y x xy
bˆ0 x 2 x 2
.
bˆ
1 xy x y
2
2
x x
(3.37)
Для вычисления стандартных ошибок сначала получим оценку дисперсии случайной составляющей в виде остаточной дисперсии
2
S ост
2
1 n
yi bˆ0 bˆ1 xi ,
n 2 i 1
(3.38)
а затем, используя корни квадратные из диагональных элементов обратной
2
матрицы, умноженной на остаточную дисперсию S ост
, запишем в явном виде выражения для вычисления стандартных ошибок оценок параметров регрессии
33
1
2
1
n
n
n
2
2 2
xi2
x
xi
i
2 i 1
2
i 1
Sbˆ S ост
S ост 2 2 S ост i 1 ,
2
0
n
n x
n x
n
2
n
x
i xi
i 1
i 1
(3.39)
1
2
1
2
S ост
n
1 2
2
.
Sbˆ S ост
S
ост
2
2
1
n
n
n
n
x
x
n xi2 xi
i 1
i 1
(3.40)
Таким образом, использование общей схемы МНК в матричной форме
позволяет легко, следуя логике общей схемы, получить стандартные ошибки
парной регрессии, записанных в виде (3.39), (3.40).
Стандартные ошибки используются, в частности, для расчета tстатистик Стьюдента
tb0
b0
;
sb0
tb1
b1
,
sb1
(3.41)
с помощью которых устанавливается, как и в случае множественной регрессии, статистическая значимость каждого коэффициента регрессии в отдельности. Кроме того, стандартные ошибки необходимы при расчете предельных ошибок
(3.42)
b0 t табл sb0 ;
b1 tтабл sb1 ,
где tтабл – табличное (критическое) значение t-статистики Стьюдента при
данных степенях свободы и выбранном доверительном уровне (см. Приложение).
Предельные ошибки, в свою очередь, применяются для определения доверительных интервалов:
(3.43)
bˆ0 b0 b0 bˆ0 b0 ;
bˆ1 b1 b1 bˆ1 b1 .
Если границы доверительного интервала содержат 0, т.е. нижняя граница
отрицательна, а верхняя – положительна, то оцениваемый параметр считается
незначимым.
Для оценки качества регрессионного уравнения используются те самые
показатели, что в случае множественной регрессии, но некоторые формулы
расчета корректируются с учетом присутствия в модели только одного фактора. Например, коэффициент корреляции в случае парной регрессии рассчитывается по формуле
rxy b1
x xy x y
,
y
x y
(3.44)
34
где x
1
2
2
xi x ;
n
y
1
2
2
yi y .
n
Значение коэффициента корреляции заключены между –1 и 1. При rxy 1
между показателем и фактором существует функциональная зависимость, при
rxy 0 между показателем и фактором нет линейной связи, при 1 rxy 1
имеет место корреляционная связь.
3.1.5. Мультиколлинеарность факторов
Рассмотрим ситуацию, когда не выполняется требование второго условия, т.е. ранг матрицы Х меньше m 1 . Нарушение этого условия эквивалентно тому, что среди столбцов матрицы наблюдений Х есть хотя бы один
такой, который является линейной комбинацией других. Следствием этого
является невозможность применения МНК для получения оценок коэффициентов регрессии.
Различают абсолютную и частичную (реальную) мультиколлинеарность.
Под абсолютной мультиколлинеарностью понимается ситуация, когда определитель матрицы системы нормальных уравнений ( XX) равен нулю, и
фактически отсутствует возможность получения однозначного решения этой
системы. Частичная мультиколлинеарность предполагает, что определитель
матрицы ( XX) в точности не равен 0, но мало от него отличается. Обратная
матрица ( XX) 1 в этом случае существует, однако ее элементы, как правило,
искажены вычислительной процедурой, так как порядок малости определителя равен порядку накапливающихся ошибок вычислений.
О присутствии мультиколлинеарности можно понять по отдельным
внешним признакам построенной модели. В первую очередь это касается
случаев, когда некоторые оценки коэффициентов регрессии имеют неправильные с точки зрения экономической теории знаки или по абсолютной величине оказываются чрезмерно большими. Кроме того, большая часть оценок, или даже все, оказываются незначимыми в многофакторной модели в то
время, как построение парных моделей свидетельствует об обратном – все
факторы значимы. Иначе говоря, проявление эффектов мультиколлинеарности делает даже адекватную модель непригодной для практического использования.
Существует несколько подходов, позволяющих устранить эффекты
мультиколлинеарности. Кратко остановимся на каждом из них.
Первый подход основан на исключении из модели одного из дублирующих друг друга факторов. Обычно это делается следующим образом. Рассчитывается матрица парных коэффициентов корреляции, и по ее элементам
определяются тесно коррелирующие друг с другом факторы. Из каждой пары
таких факторов удаляется тот, у которого теснота корреляционной связи с зависимой переменной ниже. Этот подход является эффективным в том смысле, что позволяет, как правило, устранить эффекты мультиколлинеарности.
35
Однако исследователя не всегда может устроить такой подход, так как исключение из модели некоторых факторов не позволяет достичь поставленной
цели – изучение взаимосвязи показателя именно с этим набором факторов.
Второй подход практически не упоминается в учебной литературе. В
нем используется понятие псевдообратной матрицы. В некоторых ситуациях,
когда определитель равен нулю, применение процедуры псевдообращения
позволяет получить оценки коэффициентов регрессии, которые, несмотря на
вырожденность матрицы системы нормальных уравнений, являются единственным решением этой системы. Единственность решения обеспечивается
тем, что процедура псевдообращения приводит к решению с минимальной
нормой, т.е. среди всех решений вырожденной системы нормальных уравнений выбирается то, которое обладает наименьшей суммой квадратов. Это интересный подход, но пока малоизученный.
В третьем подходе используются главные компоненты. Возможность
использования главных компонент для целей устранения эффектов мультиколлинеарности объясняется следующим образом. Поскольку мультиколлинеарность связана с высокой степенью корреляции между факторными переменными, то возникает естественное желание заменить исходные факторы
ортогональными переменными, которые представляют собой линейные комбинации исходных. В качестве коэффициентов в этих линейных комбинациях выступают компоненты собственных векторов ковариационной матрицы
исходных переменных. Собственные вектора ортогональны, и поэтому построение регрессионной модели упрощается.
При использовании главных компонентов возможны два случая. Первый связан с абсолютной мультиколлинеарность, а второй – с частичной. В
случае абсолютной мультиколлинеарности, по крайней мере, одно собственное значение равно нулю, и автоматически число главных компонентов
меньше числа исходных переменных. Регрессия строится на главные компоненты, а затем обратным преобразованием возвращаются к исходным переменным.
В случае частичной мультиколлинеарности число главных компонент
совпадает с числом исходных переменных. Если после построения регрессии
на все главные компоненты обратным преобразованием вернуться к исходным наблюдениям, то все нежелательные эффекты мультиколлинеарности
сохранятся. Поэтому смысл этого приема в том, что регрессия строится не на
все главные компоненты, а только некоторую их часть, характеризующую
основную долю вариации исходных данных. Тогда возврат к исходным переменным вполне может привести к получению модели свободной от искажений, порождаемых мультиколлинеарностью.
Четвертый подход реализует идею получения смещенных оценок, обладающих по сравнению с оценками МНК меньшей среднеквадратической
ошибкой. Чаще всего получения таких оценок используется процедура риджоценивания или процедура построения так называемой гребневой регрессии.
В основе этой процедуры лежит идея нахождения однопараметрического семейства оценок с помощью подправленной формулы МНК
36
1
bˆ XX I Xy ,
где [ ; ] (как правило, 0,1 ; 0,4 ).
(3.45)
Добавление к диагональным элементам матрицы системы нормальных
уравнений единичной матрицы, умноженной на параметр , делает получаемые с помощью этой формулы оценки коэффициентов регрессии, с одной
стороны, смещенными, а с другой – стандартные ошибки этих оценок
уменьшаются, так как «плохо» обусловленная матрица ( XX) превращается
в «хорошо» обусловленную. Реализация этого метода легко осуществима, а
получаемые оценки при соответствующем подборе параметра обладают
требуемой надежностью.
3.1.6. Особенности применение регрессионных моделей в прогнозных расчетах
Одним из основных предназначений регрессионных моделей являются
прогнозные расчеты. Есть несколько аспектов проведения этих расчетов.
Можно рассматривать ситуацию, когда, несмотря на то, что данные, по которым строилась модель, не имеют временной структуры, получаемые расчетные значения имеет прогнозный характер. Именно такой характер носят
оценки зависимой переменной, вычисляемые для того набора значений независимых переменных, которого не было в исходной выборочной совокупности.
Кроме того, различают точечные и интервальные прогнозы. В первом
случае прогнозная оценка является конкретным числовым значением, во втором – интервал, в котором истинное значение находится с заданным уровнем
доверия.
Рассматривают также безусловное и условное прогнозирование. Под
безусловным прогнозированием понимают такие расчеты, которые осуществляются при точно известных значениях объясняющих переменных. К условному прогнозированию прибегают в тех случаях, когда объясняющие переменные известны приближенно.
Формально задача прогнозных расчетов с помощью регрессионной модели выглядит следующим образом. Пусть известно, что зависимая переменная связана с независимыми переменными линейной зависимостью
y Xb ε .
(3.46)
Сама зависимость и ее случайная составляющая удовлетворяют трем
условиям классической регрессии в п. 3.3 данной главы.
Далее известно, что есть дополнительный набор значений независимых
переменных x n1 1, xn1,1 , xn1, 2 , , xn1,m , для которого отсутствует соответствующее значение зависимой переменной yn1 , но есть основание считать, что это неизвестное значение удовлетворяет модели (3.46), т.е.
(3.47)
yn1 x n1b n1 ,
37
где E n 1 0 , V n 1 2 , и случайная величина n1 не коррелированна
с . Требуется по (y, X, x n1 ) оценить yn1 .
Несмотря на кажущуюся простоту поставленной задачи, есть несколько
вариантов ее решения. Самый простой вариант расчетов используется, когда
и b , и 2 известны. В этом случае в качестве оценки yˆ n1 величины yn1
можно взять E( yn 1) xn 1b . Среднеквадратическая ошибка такого прогно-
за равна E( yn 1 yˆ n 1 ) 2 E n21 2 . Если, кроме того, известно, что
n1 нормально распределено, то можно построить доверительный интервал
( yˆ n1 t , yˆ n1 t ) , в котором yn1 находится с вероятностью , а t
есть двусторонняя -квантиль стандартного нормального распределения.
На практике параметры b и 2 редко бывают известны, поэтому в расчетах используются оценки b̂ и ˆ 2 , рассчитываемые по формулам (3.12) и
(3.17), соответственно. Тогда за оценку yn1 принимается величина
yˆ n1 x n1bˆ .
(3.48)
Полученная прогнозная оценка является несмещенной в том смысле, что
ее математическое ожидание равно математическому ожиданию yn1 , т.е.
E yˆ n 1 E( yn 1) . Это непосредственно следует из несмещенности оценок
E(bˆ ) b метода наименьших квадратов. Кроме того, можно показать, что в
классе линейных (по y ) несмещенных оценок прогнозная оценка (3.48) обладает наименьшей среднеквадратической ошибкой, т.е.
E( ~
yn 1 yn 1 ) 2 E( yˆ n 1 yn 1 ) 2 ,
где ~
yn 1 сy ), получаемой с поyn1 является другой прогнозной оценкой ( ~
мощью некоторого вектора c c , , c .
1
n
Сама среднеквадратическая ошибка зависит от содержания, которое
вкладывается в прогнозную оценку. Если полученная оценка принимается за
среднее значение генеральной совокупности yˆ n1 x n1bˆ , то ее дисперсия
равна
Var yi E[(Xbˆ Xb ) (Xbˆ Xb )] E[ X(bˆ b)(bˆ b) X]
(3.49)
X E[(bˆ b)(bˆ b)] X 2 XXXX .
Заменив неизвестную дисперсию 2 на ее оценку (3.17), получаем стан-
дартную ошибку прогноза среднего в виде
S ˆ ˆ 2 x n 1 XX 1 xn 1 x n 1S 2ˆ xn 1 .
y
b
(3.50)
Используя полученную стандартную ошибку, можно проверить гипотезу
о равенстве прогноза среднего значения заданной величине:
H 0 : yˆ n1 yn1,0
38
H1 : yˆ n1 yn1,0 .
Для проверки этой гипотезы вычисляется t-статистика
tp
yˆ n 1 y n 1,0
S 2ˆ
y
,
(3.51)
которая сравнивается с табличным значением t / 2 . Если t p t / 2 , то нулевая гипотеза отбрасывается, в противном случае – принимается за рабочую.
Квантиль t / 2 и стандартная ошибка (3.50) позволяет определить предельную ошибку прогноза среднего
2 yˆ t / 2 S yˆ ,
(3.52)
с помощью которой можно получить интервальный прогноз среднего
(3.53)
yˆ n 1 yˆ yn 1 yˆ n 1 yˆ .
Если же полученная несмещенная оценка принимается за прогноз отдельного значения, то для вычисления ее стандартной ошибки сначала определяется отклонение от фактического значения
yn 1 yˆ n 1 xn 1b n 1 xn 1bˆ xn 1(b bˆ ) n 1. (3.54)
Тогда дисперсия отдельного прогнозного значения равна
E[( yn 1 yˆ n 1 ) 2 ] E{[x n 1 (b bˆ ) n 1 ]2 }
(3.55)
E{[x n 1 (b bˆ )]2 } E( n21 ) E{2x n 1 (bˆ b) n 1} .
Второе слагаемое полученного выражения равно 2 , третье – 0 в силу
того, что вектор случайной составляющей не содержит ( n 1)-й компоненты, а с остальными компонентами n1 не коррелирует, т.е.
E{2x n 1 (bˆ b) n 1} 2x n 1 E{((XX) 1 X ) n 1} 0 .
(3.56)
Таким образом, дисперсия отдельного прогнозного значения равна
1
(3.57)
S y2ˆn1 2 x n1 XX xn1 2 .
Окончательно, заменяя неизвестную дисперсию 2 на оценку (3.17),
можно записать стандартную ошибку отдельного прогнозного значения в
следующем виде:
1
S yˆn1 ˆ 2 1 x n1 XX xn1 .
(3.58)
Иногда при записи этой стандартной ошибки используется ковариационная матрица ошибок оценок коэффициентов регрессии (3.18)
S yˆ
n 1
ˆ 2 x n 1S ˆ2 xn 1 .
b
(3.59)
По аналогии с прогнозной оценкой среднего можно вычислить предельную ошибку
(3.60)
yˆ t / 2 S yˆn1 ,
с помощью которой легко определяется величина интервального прогноза
39
yˆ n1 yˆ yˆ n1 yˆ n1 yˆ .
(3.61)
Несмотря на то, что принято различать точечный и интервальный прогноз, в реальных расчетах целесообразно точечные оценки дополнять интервальными, которые фактически характеризуют надежность точечных.
Теперь рассмотрим условные прогнозы. Примером, когда возникает
необходимость в условном прогнозировании, может служить ситуация, в которой в силу различных обстоятельств приходится прогнозировать значения
независимых переменных, что неизбежно приводит к отклонениям от истинных значений. Будем считать по-прежнему, что модель имеет вид (3.46) и
оцениваемое значение, сгенерированное в соответствии с (3.47), но вектор
независимых переменных x n1 наблюдается с ошибкой, т.е.
(3.62)
zn1 xn1 u ,
где u 0, u1, u2 , , um – случайный вектор, не зависящий от и n1 с
нулевым математическим ожиданием Е u 0 и ковариационной матрицей
V u u2 I . В этой ситуации прогноз (3.48) заменяется на
yˆ z bˆ .
(3.63)
Пусть е yˆ n 1 yn 1 – ошибка прогнозирования. Тогда ее математическое ожидание равно
n1
n1
Ee E(z n 1bˆ ) xn 1b E((xn 1 u)bˆ ) xn 1b
(3.64)
E(x n 1bˆ ) E(ubˆ ) x n 1b 0 .
Полученное равенство свидетельствует о несмещенности прогнозной
оценки (3.63). Таким образом, условный прогноз, как и безусловный, является несмещенным. Дисперсия ошибки условной прогнозной оценки превосходит дисперсию ошибки безусловного прогноза. Формула для ее расчета
E e 2 2 [1 x n 1 ( XX) 1 xn 1 u2 tr ((XX) 1 )] u2bb
(3.65)
включает два дополнительных слагаемых, пропорциональных дисперсии u2 .
К сожалению, в случае условного прогнозирования нельзя также просто, как
при безусловном прогнозировании, построить доверительный интервал для
yn 1. Это объясняется тем, что при нормально распределенных ошибках
( , n 1, u ) прогнозная оценка yˆ n 1 представляет собой скалярное произведение двух независимых нормальных векторов. Правда, существуют численные процедуры, позволяющие строить его приближенно.
3.2. Обобщенный регрессионный анализ
3.2.1. Обобщенная схема МНК
Данные, используемые при построении регрессионных моделей, не всегда обеспечивают выполнение условий классической регрессии. Чаще других
40
встречаются ситуации, когда нарушается однородность (например, когда в
одной выборочной совокупности присутствуют данные о малых и крупных
предприятиях) или не выполняется условие некоррелированности случайных
остатков (например, при использовании временных рядов для построения регрессионных моделей). И та, и другая ситуация приводит к невыполнению
условия 3b. Vε Eεε 2I .
Рассмотрим самый общий случай нарушения этого условия и выясним,
что происходит, если в основу построения множественной регрессии положены следующие предположения:
1. y Xb ε – спецификация модели;
2. X – детерминированная матрица, имеющая максимальный ранг m 1 ;
3а. Eε 0 ,
3b. Vε Ω , где матрица Ω положительно определена.
Модель, которая строится в предположении выполнения данных условий, называется обобщенной регрессией. Она отличается от классической
только условием 3b. Если для ее построения применить МНК, то полученные оценки вектора
(3.66)
bˆ (XX)Xy
обладают следующими свойствами:
1) они в силу условия 3а несмещенные, так как
E bˆ E(XX1 Xy ) E(XX1 X( Xb ε))
b XX1 X Eε b ;
(3.67)
2) их ковариационная матрица равна
V( bˆ ) E(bˆ b)(bˆ b) E[(XX) 1 Xε][(XX) 1 Xε]
EXX1 XεεXXX1 XX1 X E(εε) XXX1
(3.68)
XX1 X V( ε) XXX1 XX1 XΩXXX1 .
Как правило, матрица Ω неизвестна и ковариационную матрицу заменяют оценкой
где ˆ
2
V̂ bˆ ˆ 2 XX1 ,
(3.69)
1
ee .
n m 1
Проверим оценку ковариационной матрицы на несмещенность:
E V̂ bˆ E(ˆ 2 )XX1 .
(3.70)
В свою очередь,
E ˆ 2
1
1
1
Eee
tr Ve
tr M Ω Μ
n m 1
n m 1
n m 1
1
1
tr M 2 Ω
tr MΩ .
(3.71)
n m 1
n m 1
41
Здесь использован тот факт, что
Ve VMε M EεεM M Ω Μ ,
так как
(3.72)
e y Xb y XXX Xy I XXX X y
(3.73)
My MXb ε Mε ,
2
и матрица M обладает свойствами: M M , M M , MX 0 .
1
1
Таким образом, математическое ожидание ковариационной матрицы может
быть записано в виде
1
tr MΩ XX 1 ,
n m 1
что в общем случае не совпадает с оценкой V̂ b̂ .
E V̂ bˆ
(3.74)
Следовательно, оценка матрицы ковариации вектора b̂ , полученная с
помощью обычного МНК, является смещенной и требуется в данной ситуации применять модифицированный МНК. Способ модификации дает теорема
Айткена. В соответствии с этой теоремой для обобщенной регрессионной
модели оценка
1
bˆ XΩ 1X XΩ 1y
(3.75)
имеет наименьшую матрицу ковариаций в классе линейных несмещенных
оценок вектора b .
Таким образом, для применения обобщенного метода наименьших квадратов (ОМНК), также как и для получения оценки ковариационной матрицы,
необходимо знать матрицу Ω , которая на практике чаще всего не известна.
Самый простой способ, позволяющий справиться с этой проблемой, положен
в основу так называемого доступного обобщенного метода наименьших
квадратов, суть которого в том, что сначала каким либо образом получают
оценку матрицы Ω , а затем эту оценку используют вместо матрицы.
3.2.2. Метод взвешенных наименьших квадратов
Неоднородность дисперсии. Частным случаем обобщенного метода
наименьших квадратов является метод взвешенных наименьших квадратов.
Его обычно применяют для построения моделей, когда дисперсия случайных
остатков неоднородна, т.е. имеет место гетероскедастичность. Предположения, лежащие в основе построения этой модели, выглядят следующим образом:
1. y Xb ε – спецификация модели;
2. X – детерминированная матрица, имеющая максимальный ранг m 1 ;
3а. Eε 0 ,
3b. Vε Ω , где матрица Ω диагональная с неравными элементами.
В некоторых случаях удобно считать, что элементы ковариационной матри2
2
цы Ω представимы в виде t t t , а весовые коэффициенты t нормирова42
ны так, что t n . Если t 1 для всех t 1, 2, , n , то модель с гетероскедастичностью сводится к классической с гомоскедастичными остатками.
Применение формулы (3.75) для расчета оценок регрессионного уравнения в условиях гетероскедастичности эквивалентно минимизации взвешенной суммы квадратов
1
S( b)
t 1 t
n
2
k
yt b j xtj .
j 1
(3.76)
Последнее выражение позволяет понять содержательный смысл метода
взвешенных наименьших квадратов. Как было показано выше, применение
стандартного МНК к неоднородным данным дает неэффективные оценки.
Причина в том, что не учитывается зависящий от дисперсии уровень статистического вклада каждого слагаемого. «Взвешивание» каждого отклонения
с помощью величины 1 / t , предусмотренное в методе взвешенных
наименьших квадратов, устраняет неоднородность, причем более точным
наблюдениям (с меньшей дисперсией) придается «больший вес».
В практических расчетах применяют различные приемы для устранения
эффектов гетероскедастичности в зависимости от того, что принимается за
оценку неизвестной дисперсии.
Пропорциональность дисперсии независимой переменной. Если есть основания считать, что дисперсия ошибки прямо пропорциональна квадрату
одной из независимых переменных модели, т.е. t2 2 xtk2 , то путем деления
на эту независимую переменную всех (зависимой и независимых) переменных модели случай гетероскедастичности сводится к классической модели.
В более сложном случае можно считать, что дисперсия зависит от нескольких независимых переменных, например x1 и x2 ,
t2 d 0 d1 xt1 d 2 xt 2 .
(3.77)
Тогда моделирование осуществляется в три этапа с использованием идей доступного МНК. На первом этапе с помощью стандартного МНК строится регрессия
(3.78)
yt b0 b1xt1 b2 xt 2 bm xtm
и вычисляются остатки, квадраты которых принимаются за оценки ˆ t2 .
На втором этапе для этих оценок строится регрессия, расчетные значения которой используются для получения весовых коэффициентов, применяемых в методе взвешенных наименьших квадратов на завершающем этапе
построения модели.
Двухуровневая дисперсия. Встречаются ситуации, когда данные неоднородны по дисперсии, но их можно разделить на две группы однородных.
Пусть, например, в первой группе n1 наблюдение с дисперсией t2 12 для
t 1, 2, , n1 , а во второй – n2 наблюдений с дисперсией t2 22 для
t n1 1, , n1 n2 . Значения 12 и 22 неизвестны.
43
Для этого случая также можно предложить многоэтапную процедуру оценивания коэффициентов регрессии на основе доступного МНК.
На первом этапе стандартным МНК получают коэффициенты обычной
регрессии и с ее помощью рассчитывают остатки ei .
На втором этапе в соответствии с группировкой данных строят оценки
неизвестных значений дисперсий
1 n1 n 2 2
(3.79)
ei .
n2 i n1 1
На следующем этапе все переменные первых n1 уравнений делятся на
ˆ12
1 n1 2
ei ,
n1 i 1
ˆ 22
̂1 , а остальные – на ̂2 . К преобразованным уравнениям применяется
обычный МНК, завершающий построение модели.
Этот подход к построению регрессии в условиях гетероскедастичности с
двухуровневой дисперсией допускает обобщение на случай, когда дисперсия
имеет не два, а несколько различных уровней.
3.2.3. Корректировка стандартных ошибок
Как было показано выше, применение обычного МНК для оценки вектора параметров b в условиях гетероскедастичности позволяет получить несмещенные состоятельные оценки этого вектора, но стандартные ошибки полученных оценок смещены. Проблема их корректировки возникает потому,
что большинство компьютерных пакетов при оценивании коэффициентов регрессии вычисляют стандартные ошибки этих коэффициентов по формуле
обычного МНК, т.е. V̂ bˆ ˆ 2 XX , и, следовательно, эффект гетероскедастичности в них не учитывается. Рассмотрим два способа, позволяющих
получить стандартные ошибки с поправкой на гетероскедастичность.
Стандартные ошибки в форме Уайта. В этой форме стандартные
ошибки вычисляются тогда, когда матрица ковариаций вектора ошибок
1
диагональна, т.е. Vε t t2 , t 1, , n . Учитывая, что оценка МНК может
быть представлена в виде
bˆ b XX1 Xε ,
(3.80)
ковариационная матрица записывается следующим образом
V bˆ E XX1 XεεXXX1 XX1 XΩXXX1
1
(3.81)
nXX1 XΩX XX1 .
n
Распишем произведение матриц через сумму
n
XΩX s2 x s xs ,
s 1
(3.82)
где xs – s -я вектор-строка матрицы регрессоров.
44
Уайт показал, что замена неизвестных величин s2 на остатки в квадрате
es2 позволяют получить состоятельную оценку матрицы ковариаций оценок
коэффициентов регрессии в виде следующего выражения:
1 n
V̂ bˆ nXX1 es2 x s xs XX1 .
n s 1
(3.83)
Рассчитанные по это формуле ошибки называются стандартными ошибками
в форме Уайта.
Стандартные ошибки в форме Невье – Веста. Если ненулевые элементы ij матрицы Ω стоят не только на главной диагонали, но и на соседних
диагоналях, отстающих от главной не более чем на L (при i j L ,
ij 0 ), то выражение
V̂ bˆ nXX1
1 n
1 L n
1
es2 x s xs j et et j xt xt j xt j xt XX , (3.84)
n j 1 t j 1
n s1
как показали Невье – Вест, дает состоятельную оценку матрицы ковариаций
оценок коэффициентов регрессии. В формулу (3.84) включены весовые коэффициенты j , от выбора которых зависят стандартные ошибки. Существует несколько способов выбора этих весовых коэффициентов. Простейший случай j 1 следует исключить из рассмотрения, так как при таком
выборе весовых коэффициентов может оказаться, что матрица (3.84) не является неотрицательно определенной. Обычно рассматривают два способа,
предложенные Бартлеттом
1) j
и Парзеном:
1
;
L 1
(3.85)
2
L 1
j
j
,
1 6
6
, 1 j
L 1
L 1
2
2) j
.
(3.86)
j
L
1
21
jL
L 1 ,
2
В большинстве случаев рекомендуется использовать весовые коэффициенты
Парзена.
Рассчитанные по формуле (3.84) стандартные отклонения принято называть стандартными ошибками в форме Невье – Веста или стандартными
ошибками с учетом гетероскедастичности и автокорреляции.
3.2.4. Тесты на гетероскедастичность
Наличие гетероскедастичности не является очевидным фактом, поэтому
при построении регрессионных моделей возникает вопрос о тестировании на
45
гетероскедастичность. Как правило, в этих тестах проверяется нуль-гипотеза
H 0 : 12 22 n2 против альтернативной гипотезы HA : предположение H 0 не выполняется.
Тест Уайта. В этом тесте используется идея, состоящая в том, что
наличие гетероскедастичности является следствием взаимосвязи дисперсии
ошибок с регрессорами. Тест построен на проверке этой взаимосвязи без использования каких-либо предположений относительно структуры гетероскедастичности. Последовательность проверке в соответствии с тестом Уайта
состоит в следующем. Сначала с помощью обычного МНК строится регрессионная модель, и находятся остатки ei , i 1, 2, , n . После чего строится
регрессия квадратов этих остатков на все регрессоры, их квадраты и попарные произведения. В предположении, что гипотеза H 0 имеет место, величина nR 2 асимптотически имеет распределение 2 m 1 , где R 2 – коэффициент детерминации, а m – число регрессоров второй модели. Если
nR 2 2 m 1, то H 0 отвергается. Тест универсален и может применяться
в любых ситуациях. Однако, в тех случаях, когда гипотеза H 0 отвергается, с
помощью этого теста не удается установить структурную форму гетероскедастичности и, поэтому либо применяется другой тест, либо используются стандартные ошибки в форме Уайта.
Тест Голдфельда – Куандта. Тест используется в тех случаях, когда
есть основания предполагать, что дисперсия ошибки зависит от некоторой
независимой переменной. Краткое описание теста выглядит так:
1) данные упорядочиваются по убыванию той независимой переменной,
от которой в соответствии с предположением зависит дисперсия ошибки;
2) d наблюдений, расположенных в середине упорядоченного ряда, исключаются ( d рекомендуется брать равным четверти общего числа наблюдений);
3) по первым n / 2 d / 2 и последним n / 2 d / 2 строятся независимо
друг от друга два регрессионных уравнения и с их помощью рассчитываются
соответствующие вектора остатков e1 и e 2 ;
4) из полученных остатков рассчитывается статистика F e1 e1 / e2e 2 .
Если верна гипотеза H 0 : 12 22 n2 , то F имеет распределение Фишера с (n / 2 d / 2 k , n / 2 d / 2 k ) степенями свободы. Если статистика
больше табличного значения, то гипотеза H 0 отвергается.
Этот тест можно использовать в тех случаях, когда есть предположение,
что дисперсия принимает два значения (двухуровневая дисперсия).
Тест Бреуша – Пагана. Тест рекомендуется применять, если априори
предполагается, что дисперсия есть линейная функция от некоторых дополнительных переменных, т.е.
t2 0 zt , t 1, 2, , n ,
(3.87)
46
где zt zt1, , ztp – вектор независимых переменных;
0 , 1, , p – неизвестные параметры.
Проверка с помощью этого теста осуществляется так:
1) строится обычная регрессия, и с ее помощью рассчитываются компоненты вектора остатков e ;
2) полученные остатки используются для получения оценки дисперсии
ˆ 2 1 / n et2 ;
(3.88)
3) строится регрессионное уравнение
et2
ˆ 2
0 zt vt ,
(3.89)
для которого рассчитывается объясненная часть вариации, т.е. сумма квадратов отклонений расчетных значений от среднего значения, обозначаемая
обычно RSS;
4) статистика RSS/2 сравнивается с табличным значением 2 и, если
RSS/2 превосходит табличное значение, то нуль-гипотеза (отсутствие гетероскедастичности) отбрасывается. Возможность такой проверки обеспечивается результатом, установленным Бреушем и Паганом, в соответствии с которым при выполнении гипотезы H 0 величина RSS/2 асимптотически имеет
распределение 2 .
В тех случаях, когда среди расчетных значений уравнения регрессии,
построенного в п. 3), имеется много отрицательных, можно рекомендовать
использовать вместо линейной зависимости экспоненциальную форму гетероскедастичности
ˆ t2 e 0 z t ,
t 1, , n .
(3.90)
Использование экспоненциальной формы приводит к замене линейной регрессии п. 3) на регрессию
ln et2 / t2 0 zt ut .
(3.91)
Рассмотренные варианты обобщенной схемы МНК обеспечивают построение моделей с коэффициентами, обладающими всеми необходимыми
свойствами оценок МНК несмотря на то, что данные не отвечают требованиям однородности.
3.3. Регрессионные модели с автокоррелированными остатками
3.3.1.Общая схема МНК в случае автокорреляции первого порядка
Чаще других при построении прогнозных моделей регрессии используются данные, представляющие собой временные ряды. В случае временных
рядов нарушение условия 3b) состоит в том, что случайные остатки коррелируют между собой и, следовательно, матрица Ω становится недиагональной.
47
Поэтому рассмотренный выше метод взвешенных наименьших квадратов к
данной ситуации не применим, т.е. возникает необходимость в применении
другого варианта обобщенной схемы МНК, отличного от случая гетероскедастичности. Начнем с рассмотрения простейшего случая, когда зависимость между остатками ε y Xb , выражается автокорреляцией первого
порядка, т.е.
(3.92)
t t 1 t ,
где 1, а t – случайная величина, удовлетворяющая условиям классической регрессии
02 0 0
0 02 0
V
.
2
0
0 0
E 0 ,
(3.93)
Кроме того, будем считать, что соотношение (3.92) справедливо для любого t
( t ).
Учитывая свойства случайной составляющей ε , описываемые соотношениями (4.93), вычислим основные ее числовые характеристики E(ε ) и
V(ε) . Для этого представим случайную величину ε в виде бесконечного ряда
t t 1 t t 2 t 1 t 2 t 2 t 1 t
2 t 3 t 2 t 1 t 3 t 3 2 t 2 t 1 t
t t 1 2 t 2 k t k .
k 0
(3.94)
Используя полученное представление и свойство (3.93), получаем
E е E k t k k E( t k ) 0 ,
k 0
k 0
2
k
2
2
D t E t E t k
k 0
E t2 2 E t21 4 E t2 2
(3.95)
02
1
.
(3.96)
1 2
При вычислении дисперсии было учтено, что t между собой независимы и
поэтому математические ожидания произведений t при t равны 0.
2
0
2
4
Чтобы вычислить ковариационную матрицу, вычислим произведение
t t k при произвольном k . Для этого предварительно первый сомножитель
представим в виде двух слагаемых.
48
t t k [ t t 1 k 1 t ( k 1) k t k t k 1 ]
(3.97)
t k t k 1 .
Произведение первого слагаемого и второго сомножителя равно 0 в силу
того, что t 0 , т.е.
t t 1 k 1 t (k 1) t k t k 1 0 .
(3.98)
Таким образом, если снова учесть, что k независимы, то ковариация
между t и tk будет равна
cov t t 1 E t t k E[ k t k t k 1 2 ]
k E t2 k 2 k ,
(3.99)
где дисперсия определяется соотношением (3.96).
Мы получили представление о структуре ковариационной матрицы случайной составляющей модели с автокоррелированными остатками. Выражение (3.96) задает ее диагональные элементы, а (3.98) – внедиагональные элементы ковариационной матрицы.
Обобщая проведенные исследования, можно записать условия, в которых строится регрессионная модель с автокоррелированными остатками:
1. Спецификация y Xb ε .
2. X – детерминированная матрица n (m 1) с рангом m 1 .
3а. Eε 0 .
1
2
0
3b. Vε
1 2
n 1
1
n2
n 1
n2
.
1
Для удобства изложения материала введем обозначение
1
Σ0
n 1
1
n2
n 1
n2
.
1
(3.100)
Матрица Σ 0 симметрична и положительно определена ( xΣ0 x 0 , x произвольный ненулевой вектор). Так как по определению коэффициент
корреляции между остатками равен
r t , t k
cov t , t k
t t k
2 k
k ,
(3.101)
то можно сделать вывод о том, что в линейной модели с автокоррелированными остатками в такой математической форме реализована идея ослабления
корреляционной связи между регрессионными остатками по мере их взаимного удаления во времени.
49
Так как в дальнейшем потребуется Σ 01 , то приведем ее общий вид
0
0
1
1 2
0
1 0
1 2
Σ0
1 2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1 2
0
0
0
0
. (3.102)
1
Зная обратную матрицу (3.102), можно записать, используя схему обобщенного МНК, формулу для вычисления оптимальных оценок в классе несмещенных в следующем виде:
1
bˆ XΣ 01X XΣ 01y .
(3.103)
Так как по условию Σ 0 симметрична и положительно определена, то и
Σ 01 также симметрична и положительно определена. Следовательно, ее
можно представить как
Σ 01 СΛС ,
(3.104)
где Λ – диагональная матрица, на главной диагонали которой стоят собственные значения i матрицы Σ 01 , а С – ортогональная матрица, столбцы
которой с представляют собой собственные вектора Σ 01 , т.е. Σ 01сi i ci .
Поскольку Σ 01 положительно определенная матрица, ее собственные
числа i положительные и, следовательно, можно определить дробную степень Σ 01 в виде
P Λ1 / 2C ,
1/ 2
где Λ
(3.105)
– диагональная матрица с элементами
1/ 2
i
по главной диагонали.
Введение дробной степени позволяет представить матрицу Σ 01 в виде
произведения двух матриц
Σ 01 PP .
(3.106)
Такое представление позволяет записать формулу обобщенного МНК в виде:
1
1
bˆ XΣ 01X XΣ 01y XPPX 1 XPPy X X X y , (3.107)
где X PX , y Py .
Для рассматриваемого случая матрица Р может быть записана следую-
щим образом:
50
1 2
0
Р
0
0
0
0
0
1
0
0
1 0
0
0
0
0
0
0
0
0
0 0
.
1 0
1
0
(3.108)
Преобразование данных с помощью этой матрицы приводит к следующим результатам:
1 2 y1
y y1
y Py 2
;
y y
n
n 1
1 2
1
X PX
1
1 2 x11
x21 x11
xn1 xn11
1 2 x1m
x2 m x1m
.
xnm xn1m
(3.109)
(3.110)
Таким образом, если известно, что между остатками наблюдается автокорреляция и известен параметр , то после преобразования данных в соответствии с (3.109), (3.110) для оценки параметров регрессии можно применить обычный МНК, который, по сути, является частным случаем обобщенной схемы МНК.
Следовательно, чтобы принять решение о методе построения регрессионного уравнения по данным временных рядов, необходимо сначала установить
наличие автокорреляции в остатках, а затем получить оценку параметра .
3.3.2. Методы тестирования на автокорреляцию
Существует несколько подходов к тестированию регрессионных остатков на автокорреляцию. Во многих статистических пакетах решение задач по
построению регрессии дополняется графическим представлением результатов моделирования. В том числе предоставляется возможность визуализации
поведения отклонений et во времени. Как правило, строятся либо последовательно-временные графики, либо графики зависимости et от et 1 .
В первом случае по оси абсцисс откладывается либо время, в которое
было получено статистическое наблюдение, либо номер наблюдения, а по
оси ординат – отклонение et , величина которого становится известной после
построения уравнения регрессии.
51
et
et
et
0
0
0
t
t
t
в)
б)
а)
Рис. 3.1. Зависимость остатков от времени
Анализ графиков, представленных на рис. 3.1, показывает, что в случае
а) и б) изменение остатков et подчиняется некоторой закономерности и
можно предположить, что они автокоррелированы. Случай в) свидетельствует об отсутствии какой-либо зависимости, и предположение о возможной автокоррелированности et несостоятельно.
Во втором случае по оси абсцисс откладывается et 1 , а по оси ординат –
et . Тогда, если график будет иметь вид, представленный на рис. 3.2, то есть
все основания считать, что остатки автокоррелированы. Причем, так как
большинство точек на этом графике расположены в первой и третьей четвертях декартовой системы координат, то можно с уверенностью говорить о положительной зависимости в среднем между соседними отклонениями.
К сожалению, графики остатков не всегда выглядят так убедительно, как
на приведенных рисунках. Поэтому, кроме графических, применяются и аналитические методы тестирования на автокорреляцию остатков.
et
0
et 1
Рис. 3.2. Авторегрессионная зависимость остатков
52
Метод рядов. Этот метод состоит в следующем. После построения уравнения регрессии последовательно определяются знаки отклонений et ,
например,
(+ + + +) (- - - - - - - -) (+ + + + +) ( - - -) (+ + + +) (-),
т.е. 4 «+», 8 «-», 5 «+», 3 «-», 4 «+», 1 «-» получено при построении модели по
выборке из 25 наблюдений.
Будем называть рядом непрерывную последовательность одинаковых
знаков. Количество знаков в ряду принято называть длиной ряда.
Интуитивно понятно, что если есть ряды, то, скорее всего, между остатками есть зависимость. Причем, если рядов слишком мало по сравнению с
количеством наблюдений, то вполне вероятна положительная автокорреляция, если же рядов слишком много, то вероятна отрицательная автокорреляция. Для более обоснованного вывода предлагается следующая процедура.
Введем обозначения:
n – объем выборки;
n1 – общее количество знаков «+» при n наблюдениях (количество положительных отклонений et );
n2 – общее количество знаков « – » при n наблюдениях (количество отрицательных отклонений et );
k – количество рядов.
При достаточно большом количестве наблюдений ( n1 >10, n2 >10) и отсутствии автокорреляции доказано, что случайная величина k имеет асимптотически нормальное распределение с
Ek
2n1n2
1;
n1 n2
Dk
2n1n2 2n1n2 n1 n2
n1 n2 2 n1 n2 1
. (3.111)
Тогда, если окажется, что k удовлетворяет неравенству
(3.112)
Ek u / 2 Dk k Ek u / 2 Dk ,
то гипотеза об отсутствии автокорреляции не отклоняется ( u / 2 – / 2 квантиль стандартного нормального распределения). В противном случае – в
остатках наблюдается автокорреляция.
Критерий Дарбина – Уотсона. Этот критерий по сравнению с другими
используется гораздо чаще. В его основу положена простая идея, в соответствии с которой, если корреляция случайной составляющей регрессии t не
равна 0, то она должна присутствовать и в остатках регрессии et , получающихся в результате обычного МНК. В тесте Дарбина – Уотсона для оценки
автокорреляции используется статистика
n
d
2
et et 1
t 2
n
t 1
.
(3.113)
et2
53
Подробности применения этого критерия были рассмотрены в предыдущей
главе. Корректное использование статистики возможно при выполнении следующих условий:
1) модель, для которой возникает необходимость применения этого критерия, должна содержать свободный член;
2) предполагается, что случайная составляющая модели t определяется
в соответствии с авторегрессионной схемой первого порядка;
3) наблюдения, используемые для построения модели, имеют одинаковую периодичность, т.е. в них нет пропусков;
4) критерий нельзя применять, если в регрессионной модели в число
объясняющих переменных входит зависимая переменная с лагом в один период. Такое ограничение связано с тем, что распределение статистики d зависит не только от числа наблюдений, но и от значений самих регрессоров. А
это означает, что тест перестает играть роль критерия в том смысле, что
нельзя указать критическую область, которая позволяла бы принимать решение об отсутствии автокорреляции в тех случаях, когда в эту область попадают наблюдаемые значения статистики d .
Критерий на основе h-статистики Дарбина. Этот критерий разработан
для обнаружения автокоррелированности остатков в моделях, содержащих
авторегрессионные члены. Тестирование осуществляется с помощью hстатистики Дарбина, которая вычисляется по формуле
h ˆ
n
,
1 n D ˆ
(3.114)
где ̂ – оценка коэффициента авторегрессии;
n – число наблюдений;
D ˆ – выборочная дисперсия коэффициента при лаговой переменной yt 1
уравнения регрессии
(3.115)
yt b0 b1 xt1 bm xtm yt 1 t .
При большом объеме выборке и справедливости нулевой гипотезы
H0 : 0 статистика h имеет стандартизованное нормальное распределение
( h ~ N 0,1 ). Это позволяет по заданному уровню значимости определить
критическую точку u / 2 из условия u / 2 1 / 2 и сравнить h-
статистику с u / 2 . Если h u / 2 , то нулевая гипотеза об отсутствии автокорреляции отклоняется.
Значение ̂ рассчитывается с помощью статистики Дарбина – Уотсона
по формуле
(3.116)
ˆ 1 0,5d ,
а D ˆ представляет собой квадрат стандартной ошибки Sˆ оценки ˆ .
54
Таким образом, статистика h легко вычисляется на основе данных оцененной регрессии (3.115). Единственная проблема, которая может возникнуть связана с тем, что вполне возможен случай, когда nD ˆ 1 .
Тест серий (Бреуша – Голдфри). Идея этого теста основана на проверки
значимости коэффициента авторегрессионной модели
(3.117)
еt еt 1 t ,
где et – остатки регрессии, коэффициенты которой получены с помощью
обычного МНК.
Схема практической реализации этого теста довольно проста, и поэтому
не вызывает затруднений. Преимущество теста серий перед тестом Дарбина –
Уотсона в том, что он не содержит зону неопределенности. Кроме того, с
помощью критерия Бреуша – Голдфри можно выявлять автокорреляцию не
только между соседними, но и между отдаленными наблюдениями, т.е. проверять значимость коэффициентов в авторегрессионных моделях первого,
второго и более высоких порядков
(3.118)
еt 1 еt 1 k et k t .
Тест серий предусмотрен большинством современных компьютерных
пакетов и осуществляется специальной командой.
3.3.3. Методы оценивания параметра
в моделях с автокоррелированными остатками
Реализация метода построения регрессионных моделей с автокоррелированными остатками возможна в ситуации, когда параметр является известной величиной. В практике такие ситуации встречаются крайне редко.
Поэтому возникает необходимость в процедурах построения таких моделей,
когда неизвестно. Опишем несколько таких процедур.
Расчет с использованием статистики Дарбина – Уотсона. Известно,
что статистику Дарбина – Уотсона можно представить в виде
d 2 1 ret et 1 .
Из этого соотношения легко получить оценку параметра , приняв за нее автокорреляцию ret et 1
ˆ ret et 1 1
d
.
2
(3.119)
Такой метод оценивания рекомендуют применять при достаточно большом числе наблюдений.
Метод Кохрейне – Оркатта. Метод представляет собой итерационную
процедуру из нескольких шагов:
1. С помощью обычного МНК строится регрессионная модель yˆ Xbˆ и
рассчитывается вектор остатков e y yˆ .
55
2. По полученным остаткам е строится авторегрессионное уравнение
еt еt 1 t , оценка параметра которого ̂ принимается за искомый параметр.
3. С помощью найденного значения ̂ осуществляется преобразование
исходных данных, и находятся МНК-оценки b̂ регрессионной модели;
4. Рассчитывается новый вектор остатков e y Xbˆ ;
5. Процедура повторяется, начиная со второго шага.
Процедура заканчивается, когда очередное приближение ̂ мало отличается от предыдущего.
Метод Кохрейна – Оркатта предусмотрен большинством современных
компьютерных пакетов.
Метод Хилдрета – Лу. Этот метод основан на подборе параметра из
интервала его возможных значений (-1; 1). Подбор осуществляется следующим образом. Последовательно для каждого значения параметра , определяемого с некоторым шагом (например, 0,1 или 0,05), исходные данные преобразуются по формулам (3.109), (3.110) и рассчитываются МНК-оценки. В
качестве финального выбирается то значение параметра , при котором
сумма квадратов отклонений ee минимальна. Для нахождения уточненного
значения в окрестности полученного таким образом параметра, устраивается
более мелкая сетка, и процесс повторяется.
Метод Дарбина. Для реализации этого метода уравнение линейной регрессии записывается в виде
yt b0 1 yt 1 b1 xt1 b1 xt 11 bm xtm bm xt 1m t . (3.120)
Смысл записанного таким образом уравнения в том, что yt 1 включается
в число регрессоров, а – число оцениваемых параметров.
Введем обозначения 0 b0 1 и b j j и перепишем (3.120) следующим образом:
(3.121)
yt 0 yt 1 b1 xt1 1 xt 11 bm xtm m xt 1m t .
Оценив параметры и j уравнения (3.121) с помощью обычного
МНК, можем получить оценки исходного уравнения регрессии в виде
bˆ0 0 ;
1 ˆ
ˆ j
ˆ
bj .
ˆ
(3.122)
В этом методе первое наблюдение исключается из расчетов, так как
(3.120) записывается для t 2 .
3.3.4. Прогнозные расчеты при автокоррелированных остатках
В расчетах по модели с автокоррелированными остатками для повышения надежности прогнозных оценок можно использовать информацию об
56
ошибках. Если ошибки в регрессионной модели образуют авторегрессионный процесс первого порядка
(3.123)
t t 1 t , t 1, n 1,
где t – последовательность независимых нормально распределенных случайных величин с нулевым средним, постоянной дисперсией 2 и 1, то
в качестве прогнозной оценки можно вместо yˆ n1 x n1b взять
(3.124)
yˆ n1 xn1b n xn1b yn xnb .
Так как
(3.125)
yn1 x n1b n1 xn1b n n1 ,
то
(3.126)
en1 yn1 yˆ n1 n1 .
Можно получить выражение для дисперсии остатка еn1 , для чего вычислим квадрат этой ошибки
еn21 n21 n1 n n21 2 n1 n 2 n2
n21 2 2 n2 2 n n 2 n2 n21 2 n2 2 n n . (3.127)
2
Дисперсия равна математическому ожиданию полученного выражения
Е еn21 E n21 2 n2 2 n n 1 2 2 .
(3.128)
Таким образом, если в прогнозных расчетах учитывается автокорреляция ошибки, то дисперсия прогнозной оценки уменьшается.
Чтобы этот результат можно было использовать в практике прогнозных
расчетов, необходимо значения параметров b и в формуле (3.124) заменить оценками, полученными с помощью одной из выше описанных процедур построения регрессии с автокоррелированными остатками
(3.129)
yˆ n1 x n1bˆ ˆ yn x nbˆ .
Среднеквадратическая ошибка прогноза рассчитывается по формуле
(3.128), в которой дисперсия 2 заменяется оценкой ˆ 2 , получаемой по
остаткам построенной регрессии.
3.4. Регрессионные модели с лаговыми переменными
3.4.1. Общий вид моделей с лагами в независимых переменных
Особое место в решении прогнозных задач отводится моделям с лаговыми переменными. Это вполне естественно, так как воздействие многих
экономических факторов на результирующий показатель проявляется не
мгновенно, а с некоторым запаздыванием. При выработке экономической
стратегии модели подобного типа позволяют получить ответ на вопрос: «Что
необходимо делать сегодня, чтобы получить желаемый результат в будущем?» Можно указать ряд причин, порождающих механизмы запаздывания
во взаимодействии экономических факторов:
57
1) Институциональные причины. Прежде всего, к этим причинам относятся контрактные отношения между различными хозяйствующими субъектами, предполагающие поддержание некоторой стабильности на протяжении
определенного отрезка времени. Стабильность в отношениях создает стабильность экономического взаимодействия, порождающего, в свою очередь,
лаговый механизм получения результатов.
2) Психологические причины. Проявление этих причин осуществляется
через инерционное поведение людей. Так, люди тратят свои доходы не сразу,
а постепенно. Они следуют определенному, привычному для них, образу
жизни, в частности, стремятся к поддержанию достигнутого уровня жизни,
приобретая привычные блага даже в момент падения своих доходов. Следовательно, в самом поведении человека, в принимаемых им решениях проявляется своеобразный лаговый механизм.
3) Технологические причины. Эти причины непосредственно связаны с
инерционностью проявления научно-технического прогресса. Очевидно, что
эффект от замены старого оборудования новым проявляется не мгновенно, а
через некоторое время.
4) Механизм взаимодействия экономических показателей. Многие экономические явления, обладая инерционностью, продолжают оказывать свое
воздействие на соответствующие показатели в течение длительного периода
времени. Например, инфляция, проявившись однажды, воздействует на такие
макроэкономические показатели, как уровень спроса, безработицы, сбережений, достаточно длительное время. Известный мультипликатор Кейнса оказывает положительное влияние на экономику в течение определенного временного интервала.
Формальным представлением запаздываний во взаимодействии экономических показателей являются модели с различной структурой лагов. В качестве примеров рассмотрим модель с конечным числом лагов
(3.130)
yt a0 b0 xt b1 xt 1 bl xt l t
и модель с бесконечным числом лагов
(3.131)
yt a0 b0 xt b1 xt 1 b2 xt 2 t ,
где yt – значение моделируемого показателя в момент времени t ;
xt – значение фактора в момент времени t ;
t – случайная величина;
а0 , b0 , b1 , b2 , – параметры моделей
Методы построения этих моделей различны, поскольку зависят от числа
лагов – конечного или бесконечного. И в той, и другой модели коэффициент
b0 принято называть краткосрочным мультипликатором, так как с его помощью оценивается изменение среднего значения y под воздействием единичного изменения переменной x в тот же самый момент времени. Сумма
всех коэффициентов b j называют долгосрочным мультипликатором. С его
j
помощью характеризуют изменение y под воздействием единичных измене58
ний переменной x в каждом из учитываемых моделью временных периодов.
Любая частичная сумма
h
bj (h l )
называется промежуточным мульти-
j 0
пликатором.
Для оценивания коэффициентов с конечным числом лагов можно использовать обычный МНК, так как, по сути, она представляет собой уравнение множественной регрессии. Правда, при построении этих моделей часто
приходится сталкиваться с проблемами мультиколлинеарности. Для оценки
коэффициентов модели с бесконечным числом лагов разработаны специальные методы, к рассмотрению которых мы переходим.
Метод Койка основан на естественном предположении о том, что степень влияния лаговой переменной убывает по мере возрастания лага. Причем, такое убывание происходит согласно закону, описываемому геометрической прогрессией, т.е. коэффициенты при xt , xt 1 , xt 2 , соответственно
равны b0 , b0 , b0 2 , . Таким образом, в общем случае k -й коэффициент
модели с бесконечным числом лагов можно записать в виде
bk b0 k , k 0, 1, 2, , 0 1 .
(3.132)
Используя такое представление коэффициентов, модель с бесконечным
числом лагов можно преобразовать в следующее уравнение:
yt a0 b0 xt b0 xt 1 b0 2 xt 2 t .
(3.133)
В результате проведенного преобразования получена модель всего с
тремя неизвестными коэффициентами a0 , b0 , , которые можно определить
различными способами. Один из методов предусматривает подбор параметра
из интервала 0, 1 . Для этого параметру последовательно присваиваются значения с некоторым фиксированным шагом h (например,
h 0,01; 0,001 ) и для каждого так полученного значения рассчитывается
zt xt xt 1 2 xt 2 3 xt 3 p xt p ,
(3.134)
где р – количество лагов, участвующих в расчете.
Величина р определяется из условия, что дальнейшее добавление лаговых значений практически не изменяет величину z t , т.е. изменение z t , вызванное добавлением ( p 1) -го лага, меньше ранее заданного положительного числа. Замена лаговых переменных одной интегрированной сводит задачу построения модели с лаговыми переменными к оцениванию коэффициентов уравнения
(3.135)
yt a0 b0 zt t
и выбору того значения , при котором коэффициент детерминации уравнения (3.135) будет наибольшим. Полученные таким образом параметры
a0 , b0 , подставляются в уравнение (3.133), которое готово для проведения
прогнозных расчетов.
59
Второй метод построения модели с бесконечным числом лагом основан
на преобразовании Койка. Для выполнения этого преобразования запишем
уравнение для момента времени (t 1)
(3.136)
yt 1 a0 b0 xt 1 b0 xt 2 t .
Умножим полученное уравнение на и вычтем его из (3.133). Получим
следующее уравнение:
(3.137)
yt yt 1 1 a0 b0 xt t t 1 ,
которое можно переписать в виде
(3.138)
yt 1 a0 b0 xt yt 1 vt ,
где vt t t 1 – скользящая средняя.
Полученное уравнение является результатом преобразования Койка. Оно
не содержит бесконечного числа лагов с убывающими по закону геометрической прогрессии коэффициентами и представляет собой уравнение с авторегрессионным членом (3.138). Для его построения необходимо оценить всего
три коэффициента a0 , b0 , . Модель (3.138), несмотря на компактность своей записи, позволяет анализировать краткосрочные и долгосрочные эффекты
переменных. В краткосрочном периоде значение yt 1 можно считать фиксированным. Тогда краткосрочный мультипликатор равен b0 .
Долгосрочный мультипликатор вычисляется по формуле суммы бесконечно убывающей геометрической прогрессии. Если далее предположить,
что в долгосрочном периоде xt стремится к некоторому своему равновесному значению x , то значение yt также стремится к своему равновесному
значению y . Для равновесного состояния уравнение (3.138) без учета случайного отклонения примет вид
y 1 a0 b0 x y
(3.139)
и можно определить равновесное значение
y a0
b0
x .
1
(3.140)
Коэффициент, стоящий при x в (3.140), является долгосрочном мультипликатором, так как он в соответствии с известной формулой является
суммой бесконечно убывающей геометрической прогрессии, т.е.
b0
b0 b0 b0 2 b0 3 .
(3.141)
1
Очевидно, что при 0 1 сила воздействия долгосрочного мультипликаb0
b0 .
тора превосходит силу воздействия краткосрочного, поскольку
1
Применение МНК для оценки параметров лаговой модели, полученной с
помощью преобразования Койка, не всегда корректно в силу следующих обстоятельств:
60
1) Переменная yt 1 , которая используется как независимая переменная,
имеет стохастическую природу, как и yt , что нарушает одну из предпосылок
МНК. Кроме того, она скорее коррелирует со случайной составляющей vt ,
чем не коррелирует.
2) Несмотря на то, что для t , t 1 предпосылки МНК выполняются, но
для vt t t 1 имеет место явная автокорреляция, которую можно тестировать h -статистикой Дарбина.
Если не применять специальных методов оценивания, то, возможно, что
полученные оценки коэффициентов этой модели окажутся смещенными и
несостоятельными.
Распределенные лаги Алмон. На коэффициенты уравнения регрессии,
при построении которого используется преобразование Койка, накладываются достаточно жесткие ограничения, которые связаны с предположением о
том, что значения коэффициентов при лаговых переменных убывают в геометрической последовательности. Целесообразность этих предположений,
как показывает практика, не во всех случаях себя оправдывает. Весьма реальна ситуация, когда, например, значения лаговой переменной с запаздыванием на 2 и 3 периода оказывают на зависимую переменную более сильное
влияние, чем текущее и предшествующее текущему значение, т.е.
b2 , b3 b0 , b1. Для моделирования подобных ситуаций достаточно гибким
инструментом является аппарат распределенных лагов Алмон.
Модель Алмон строится в предположении, что значения коэффициентов
b j могут быть аппроксимированы полиномами соответствующей степени от
величины лага j , т.е.
b j c0 c1 j c2 j 2 ck j k .
(3.142)
Реализация этого предположения позволяет каждый из коэффициентов
лаговой модели представить в виде:
b0 c0
b1 c0 c1 c2 ck
b2 c0 2c1 4с2 2 k ck
b3 c0 3c1 9c2 3k ck
bl c0 lc1 l 2 c2 l k ck .
(3.143)
Подставить в уравнение (3.142) вместо коэффициентов полиномы, их
аппроксимирующие, получим выражение
yt a0 c0 xt (c0 c1 ck ) xt 1
(c0 2c1 4c2 2 k ck ) xt 2
(c0 3c1 9c2 3k ck ) xt 3
(c0 lc1 l 2 c2 l k ck ) xt l t .
(3.144)
61
После перегруппировки слагаемых это выражение переписывается в виде
yt a0 c0 xt xt 1 xt 2 xt l
c1 xt 1 2 xt 2 3xt 3 lxt l
c2 xt 1 4 xt 2 9 xt 3 l 2 xt l
ck xt 1 2 k xt 2 3k xt 3 l k xt l t .
(3.145)
Если ввести новые переменные
z0
l
l
l
l
j 0
j 1
j 1
j 1
xt j , z1 j xt j , z 2 j 2 xt j , . . . , z k j k xt j , (3.146)
и заменить ими в (3.145) выражения в круглых скобках, то модель с распределенными лагами может быть представлена в виде регрессионной модели
(3.147)
yt a0 c0 z0 c1 z1 c2 z2 ck zk t ,
коэффициенты которой можно оценить с помощью МНК.
Все проведенные рассуждения и преобразования имеют смысл, если известна величина максимального лага l и определен порядок полинома, описывающего структура лага. В практических ситуациях, как правило, такая
информация отсутствует. Поэтому величину лага l и порядок полинома
k определяют в процессе построения модели.
Последовательность процедур, выполняемых при использовании метода
Алмон для построения моделей с распределенными лагами, следующая:
1) определяется максимальный лаг l ;
2) определяется степень полинома k ;
3) рассчитываются с помощью (3.146) значения переменных
z0 , z1 ,, zk ;
4) оцениваются с помощью МНК параметры уравнения линейной регрессии (3.147);
5) рассчитываются параметры исходной модели с помощью соотношений (3.143).
Практическая реализация этих процедур требует определенных усилий.
Проблема в том, что для некоторых из выше приведенных пунктов нет единых рекомендаций их выполнения. Это касается 1), 2) и 4) пунктов. Логика
построения этих моделей требует, чтобы величина максимального лага и
степень полинома были определены до непосредственного построения модели, но процедуры их определения нельзя отнести к тривиальным.
Известно, что ошибки при определении этих величин приводят к построению неадекватных моделей. Причем, если установленный лаг l оказался
меньше реального, то это приводит к неверной спецификации модели, так
как эта ситуация эквивалентна тому, что в регрессионной модели (4.147)
учтены не все факторы и, следовательно, остатки будут коррелировать с зависимой переменной. А это значит, что не соблюдается предпосылка МНК о
случайности остатков. Невыполнение этого условия приводит к получению
смещенных и неэффективных оценок регрессионных коэффициентов.
В тех же случаях, когда l превосходит реальную величину возникает ситуация аналогичная включению в модель статистически незначимого факто62
ра. Нежелательный эффект от такой ошибки выражается в снижении эффективности получаемых с помощью МНК оценок. Но все же в этом случае
оценки несмещенные и, поэтому ошибка с завышением величины лага приводит к меньшим искажениям модели, чем ошибка с заниженной его величиной.
Есть несколько подходов, которые решение этой проблемы переводят в
практическую плоскость. Первый связан с построением нескольких альтернативных уравнений регрессии, в которых используется различные величины
лагов, и выборе наилучшего из построенных уравнений. Очень важно, чтобы
среди альтернативных вариантов оказались те уравнения, которые построены
для максимально возможных лагов. Только в этом случае можно надеяться
на получение истинной величины лага.
Второй подход основан на простом способе, предусматривающем измерение тесноты связи между зависимой переменной и всевозможными лаговыми значениями независимой переменной. В соответствии с этим подходом
величина лага определяется по статистически значимой связи с переменной,
имеющей максимальный лаг.
Вопрос о порядке полинома решается, в основном, путем сравнения моделей построенных с использованием полиномов различной степени. В практических расчетах обычно ограничиваются построением моделей, структура
лага которых задается полиномом степени не выше трех. Выбирается та модель, которая тестируется как наиболее адекватная.
Последняя проблема, возникающая при построении модели (4.147), связана с обычно имеющей место мультиколлинеарностью переменных
z0 , z1 , , zk , проявление которой сказывается на надежности получаемых
оценок для b0 , b1 , , bl . Однако их искажение значительно меньше, чем, если
бы эти оценки были получены обычным МНК для регрессии на исходные лаговые переменные xt , xt 1 , , xt l . Для снижения эффекта мультиколлинеарности можно применять рекомендуемые для этих целей процедуры, но не
все. Например, исключение некоторой части сильно коррелирующих между
собой факторов здесь не применимо.
4. АВТОРЕГРЕССИОННЫЕ ПРОЦЕССЫ И ИХ МОДЕЛИ
4.1. Стационарность
Рассмотренные в Главе 2 трендовые модели временных рядов строились
в предположении, что изменения уровней временного ряда происходит по
определенному закону, который можно записать в виде некоторой элементарной функции от времени. Функция подбиралась в соответствии с типом
роста временного ряда. При таком подходе к построению модели статистические характеристики временного ряда не учитывались. В рассматриваемых
здесь моделях авторегрессии динамика выражается не через функцию от
времени, а через зависимость между текущими и предыдущими уровнями
63
временного ряда. Такой подход требует, чтобы используемые для построения
модели данные обладали определенным свойством, которое принято называть стационарностью.
Временной ряд называется стационарным, если он обладает постоянной
средней и дисперсией, а ковариация зависит только от временного интервала
между двумя отдельными наблюдениями. Если для исходного временного
ряда не выполняется хотя бы одно из этих условий, то возникают проблемы с
построением рассматриваемого здесь типа прогнозных моделей.
4.2. Модель авторегрессии
Принято считать, что если временной ряд характеризует процесс, при
котором его текущее значение находится в линейной зависимости от предыдущих значений, то процесс называется авторегрессионным. Для таких процессов вводится понятие «порядок авторегрессии». Например, если текущее
наблюдаемое значение является линейной функцией всего лишь одного значения непосредственно предшествующего наблюдения, то такой процесс
называют авторегрессионным процессом первого порядка, его модель записывают в виде
(4.1)
yt a0 a1 yt 1 t
и обозначают AR(1). Это понятие легко обобщается на случай авторегрессии
порядка n, т.е. AR(n). Например, модель процесса AR(3) может быть записана
следующим образом:
(4.2)
yt a0 a1 yt 1 a2 yt 2 a3 yt 3 t .
Уравнение (4.2) представляет собой многофакторную модель регрессии, в
которой в качестве независимых переменных используются прошлые значения зависимой переменной. При построении таких моделей возникает вопрос
определения степени автокорреляции временного ряда. Этот вопрос будет
рассмотрен ниже.
4.3. Понятие интеграции
Построение авторегрессионной модели предполагает стационарность
временного ряда, данные которого используются для оценки ее параметров.
Причин приводящих к нарушению условий стационарности достаточно много. Различны и варианты нарушения этих условий. Чаще других нарушаются
условия постоянства среднего и дисперсии. Рассмотрим случай, когда условия стационарности нарушаются наличием линейного тренда в поведении
среднего. Если в среднем наблюдается тренд, то вычисляются первые разности
yt yt yt 1
a00 a01t a1 yt 1 t a00 a01(t 1) a1 yt 1 t 1
a01 a1yt ut ,
(4.3)
64
в которых, как видно из выполненных преобразований, тренд отсутствует и
делается попытка построения модели по временному ряду yt . Если полученный временной ряд y1, y2 , , yT стационарен, и для него можно построить авторегрессионные модели, то исходный ряд называется интегрированным рядом первого порядка и обозначается I(1). Если ряд из первых разностей не стационарен (например, случай квадратичного тренда) и для получения стационарного ряда требуется расчет разностей второго порядка
yt2 yt yt 1 , то исходный ряд называется интегрированным рядом
второго порядка и обозначается I(2). Если же сам исходный ряд является
стационарным и не требуется вычисление разностей, то такой ряд называется
интегрированным рядом нулевого порядка или I(0).
Как отмечалась выше, стационарный временной ряд I(0) имеет конечную
дисперсию. Кроме того, изменения запаздывающей переменной будут иметь
только промежуточное влияние на временной ряд и, следовательно, коэффициенты автокорреляции будут постепенно убывать. Причем характер убывания таков, что сумма коэффициентов корреляции имеет конечный предел.
Если же ряд I(1), то изменения будут иметь постоянный характер, а дисперсия такого ряда с течением времени возрастает до бесконечности.
Построение модели без учета порядка интегрированности временного
ряда может привести к заметным искажениям и неправильным выводам.
Путем взятия разностей не всегда удается нестационарный ряд преобразовать в стационарный. Например, если временной ряд отражает динамику
сезонного явления, то его преобразование к стационарному ряду осуществляется путем исключения сезонной компоненты, а не взятием разностей. Применение процедуры взятия разностей к нестационарному временному ряду,
описываемому моделью
(4.4)
yt a1 yt 1 t ,
a1 1 ,
оказывается бесполезным, так как ряд из разностей
(4.5)
yt a1yt 1 t
продолжает оставаться нестационарным
Особо рассматриваются случаи построения моделей по временным рядам, в которых причиной нестационарности является неоднородность дисперсии.
4.4. Модели скользящей средней
Кроме авторегрессионных, при моделировании временных рядов используются модели скользящей средней. Сразу заметим, что рассматриваемые здесь модели не имеют ничего общего со схожим термином, относящимся к технике сглаживания данных.
Модель скользящей средней – это модель, в которой моделируемый показатель задается линейной функцией от прошлых ошибок, т.е. разностей между прошлыми фактическими наблюдениями и прошлыми смоделированными
65
(рассчитанными по модели) значениями. Модель скользящей средней записывается в виде
(4.6)
yˆt b0 b1 t 1 b2 t 2 b3 t 3 t ,
где
(4.7)
t yt yˆt .
Как правило, модели скользящей средней самостоятельно не используются,
но между ними и моделями авторегрессии есть взаимосвязь, их совместное
применение обеспечивает более компактное представление рассматриваемых
здесь моделей.
4.5. Авторегрессионные модели скользящей средней
Для временных рядов разработаны модели, в которых комбинируется
авторегрессионное представление временного ряда с моделью скользящей
средней. Эти модели принято называть авторегрессионными моделями
скользящей средней и обозначать ARMA(p, q), где p – количество запаздывающих переменных в авторегрессионном процессе, а q – количество переменных в модели скользящей средней. Например, модель ARMA(3, 2) может
быть записана следующим образом:
(4.8)
yt a0 a1 yt 1 a2 yt 2 a3 yt 3 b1 t 1 b2 t 2 ut ,
где ut – ненаблюдаемая ошибка в данном уравнении.
4.6. Авторегрессионные интегрированные модели скользящей средней
Авторегрессионные интегрированные модели скользящей средней
(ARIMA) отличаются от моделей ARMA тем, что перед их построением определяется порядок разности между уровнями временного ряда для получения
в случае необходимости стационарного ряда. Процесс, порождаемый моделями ARIMA, характеризуется тремя параметрами: p – порядок авторегрессии; d – порядок предварительно определяемых разностей; q – порядок
скользящей средней в модели. Таким образом, ARIMA, включая в себя описания процессов авторегрессии, скользящего среднего и интегрирования, является обобщением, позволяющим многие динамические процессы рассматривать как процессы ARIMA.
При построении моделей ARIMA очень важно в моделируемом временном ряде выделить эти три составляющие для того, чтобы определить структуру моделируемого процесса. С этой целью построение модели осуществляют в несколько этапов. На первом этапе ведется расчет разностей для получения стационарного ряда. Затем для полученного стационарного ряда пытаются построить модель ARMA. Фактически выделение этих составляющих
позволяет разбить все динамические ряды на классы со специфическими
свойствами.
66
Например, рассмотрим абсолютно случайный процесс, в котором yt зависит только от среднего уровня ряда и ошибки, т.е.
(4.9)
yt t ,
где t ~ iid (0, 2 ) (independent identically distributed) независимые, одинаково распределенные с нулевым средним и дисперсией 2 ошибки.
В этом процессе не наблюдается зависимость от прошлых значений y , в
нем не фигурируют разности yt yt 1 , и нет зависимости от ошибок в прошлых периодах. Поэтому этот процесс классифицируется как процесс ARIMA
(0, 0, 0).
Если процесс состоит только из авторегрессионной составляющей, то
его модель может быть записана следующим образом:
yt yt 1 t ,
t ~ iid (0, 2 ) ,
(4.10)
yt yt 1 t ,
t ~ iid (0, 2 ) ,
(4.11)
где 1 1 и t – случайная составляющая.
Рассматриваемый процесс фактически является AR(1) процессом и классифицируется как процесс ARIMA(1, 0, 0).
В случае, когда 1 , процесс не является стационарным и только с помощью вычисления разностей может быть полностью трансформирован в
стационарный. Модель такого процесса представима в виде
а сам процесс классифицируется как ARIMA(0, 1, 0).
Если единственной составляющей процесса является скользящая средняя, то мы имеем дело с процессом ARIMA(0, 0, 1), модель которого отражает
зависимость y от значений ошибки и записывается в виде:
yt t t 1,
t ~ iid (0, 2 ) .
(4.12)
В случае, когда процесс комбинируется из авторегрессионной составляющей и скользящей средней, его модель записывается следующим образом:
yt yt 1 t 1 t ,
и классифицируется как ARIMA(1, 0, 1).
t ~ iid (0, 2 )
(4.13)
4.7. Коэффициент автокорреляции и проверка его значимости
Степень автокоррелируемости процессов измеряется коэффициентом автокорреляции, который устанавливает корреляционную связь между текущими и прошлыми наблюдениями временного ряда и рассчитывается по
формуле
nk
rk
yt y yt k y
t 1
n
yt y
,
(4.14)
2
t 1
67
где k – количество лагов (запаздываний). В соответствии с этой формулой
коэффициент автокорреляции первого порядка рассчитывается при k 1 ,
второго порядка – при k 2 и т.д. При построении модели определяются коэффициенты автокорреляции всех порядков, и затем проводится статистическая проверка их значимости, чтобы установить с какими лагами следует
включать в модель переменные.
Значимость коэффициентов автокорреляции принято проверять с помощью двух критериев: критерия стандартной ошибки и Q-критерия Бокса –
Пирса.
Первый критерий используется для проверки значимости отдельного коэффициента автокорреляции. С его помощью удается выявить среди запаздывающих переменных те, которые необходимо включить в модель. Второй
критерий позволяет сделать вывод о значимости всего множества переменных, включаемых в модель.
Суть проверки по первому критерию сводится к построению доверительного интервала для каждого k -го коэффициента автокорреляции
1,96
1
1
.
rk 1,96
n
n
Возможность построения такого интервала основана на том, что коэффициенты автокорреляции случайных данных обладают выборочным распределением, приближающемуся к нормальному с нулевым математическим
1
ожиданием и средним квадратическим отклонением, равным
. Если расn
считанное значение автокорреляции попадает в этот интервал, то можно сделать вывод, что данные не показывают наличие автокорреляции k -го порядка.
Статистика для проверки по критерию Q рассчитывается по формуле
m
Q n ri2
i 1
~
2 ( m) ,
(4.15)
где n – объем выборочной совокупности;
m – максимальный рассматриваемый лаг.
Статистика (4.15) имеет распределение 2 с m –степенями свободы и
поэтому в случае, когда расчетное значение Q превосходит критическое значение 2 с соответствующими степенями свободы, то, в целом, вся группа
коэффициентов для лагов, не превосходящих m , считается значимой.
4.8. Определение порядка моделей ARMA
Определение порядка авторегрессионной составляющей модели ARMA
основано на проверке значимости коэффициентов автокорреляции. Кроме
коэффициентов автокорреляции, при определении порядка авторегрессионной модели используются частные коэффициенты автокорреляции. Они
68
лежат в основе построения частной функции автокорреляции и измеряют
связь между текущими значениями переменной yt и последующим значениями этой же переменной yt 1, yt 2 , , yt m , когда влияние всех промежуточных временных лагов устранено. В соответствии с этим определением
частный коэффициент автокорреляции первого порядка будет равен коэффициенту автокорреляции первого порядка, так как в этом случае отсутствуют
промежуточные лаги. Но частный коэффициент второго порядка будет отличаться от коэффициента автокорреляции второго порядка.
Частные коэффициенты автокорреляции используются для определения
степени автокорреляции внутри временного ряда. Если процесс AR(m), то это
значит, что последний статистически значимый частный коэффициент автокорреляции рассчитан с лагом m . Следовательно, если при исследовании динамического процесса удается выяснить, что значения коэффициентов автокорреляции затухают по экспоненте, а частные коэффициенты автокорреляции значимо отличаются от 0 для временных лагов от 1 до m , а для лагов,
превышающих m , резко падают до 0, то необходимо сделать вывод о построении авторегрессионной модели порядка m .
Формальный вывод о затухающей динамике коэффициентов автокорреляции в случае авторегрессионной модели можно получить следующим образом. Рассмотрим модель процесса AR(1)
(4.16)
yt 0 1 yt 1 t , t ~ iid (0, 2 ) .
Последовательно подставляя в (5.16) соответствующие выражения для
yt 1 , yt 2 , …
yt 0 1 yt 1 t
a0 a1( 0 1 yt 2 t 1) t
a0 a1 0 12 yt 2 a1 t 1 t
a0 a1 0 12 ( 0 1 yt 3 t 2 ) a1 t 1 t
a0 a1 0 12 0 13 yt 3 a12 t 2 a1 t 1 t
. . . . . . . . . . . . . . . . . . . . . . .
a0 (1 a1 12 a13 ) t a1 t 1 a12 t 2 a13 t 3 , (4.17)
получим представление авторегрессионного процесса через случайные составляющие t . С помощью этого представление определить основные статистические характеристики этого процесса: математическое ожидание, дисперсию, ковариацию.
При a1 1 (процесс стационарный) и с учетом условий, которым удовлетворяет случайная величина t математическое ожидание равно
E yt
0
.
1 1
(4.18)
Введем обозначение E yt и вычислим дисперсию
69
0 V yt E[( yt ) 2 ] E( t2 a12 t21 a14 t2 2 )
E(
2
)(1 a12
a14
)
2
1 a12
.
(4.19)
Прежде чем вычислить коэффициент ковариации k -го порядка, выполним операцию умножения, используя свойство независимости t и опуская
при перемножении те члены, математическое ожидание которых должно
быть равно нулю
( yt )( yt k )
[( t a1 t 1 a1k 1 t ( k 1) ) a1k ( t k a1 t k 1 )
( t k a1 t k 1 ) a1k ( t2 k a12 t2 k 1 ) .
(4.20)
Используя это выражение, получаем значение коэффициент ковариации
k -го порядка k
k Cov( yt yt k )
E[ a1k ( t2 k
a12 t2 k 1 )] a1k
2
1 a12
.
(4.21)
Из коэффициента ковариации легко получается соответствующий коэффициент автокорреляции
rk k 1k .
0
(4.22)
Выражение (4.22) объясняет характер экспоненциального затухания значений автокорреляционных коэффициентов авторегрессионного процесса.
Формулы для вычисления значений частных коэффициентов автокорреляции очень громоздки, и поэтому пользоваться ими не очень удобно. В
практике построения авторегрессионных моделей обычно принято пользоваться фактом, в соответствии с которым выборочное значение частного коэффициента автокорреляции k можно вычислять как МНК-оценку последнего коэффициента авторегрессионного уравнения k -го порядка
(4.23)
yt 0 1 yt 1 2 yt 2 k yt k t ,
т.е. k âk . Статистическая значимость âk свидетельствует об отличии от
нуля частного коэффициента автокорреляции.
Таким образом, авторегрессионный процесс первого порядка имеет следующие характеристики:
E yt 0 ;
1 1
1 1 0 ;
2
;
0 Var yt
2
1 1
1 r1 1 1 .
0
(4.24)
70
Его частная автокорреляционная функция порядка выше первого ( k 1 )
должна быть равна нулю, в противном случае это авторегрессионный процесс не первого порядка.
По поведению коэффициента корреляции и частного коэффициента автокорреляции можно также определить, содержит ли временной ряд элемент
скользящей средней. Если временной ряд скорее является MA, чем AR процессом, то с помощью коэффициента автокорреляции не удается установить
порядок авторегрессионого процесса. Это следует из того, что модель скользящего среднего первого порядка МА(1)
yt a0 t t 1 , t ~ iid (0, 2 )
(4.25)
может быть представлена в виде авторегрессионого процесса AR( ). С этой
целью уединим t в левой части уравнения и используем прием, который
применялся при исследовании AR(1) модели,
t a0 yt t 1
a0 yt (a0 yt 1 t 2 )
a0 yt a0 yt 1 2 t 2
a0 yt a0 yt 1 2 (a0 yt 2 t 3 )
a0 yt a0 yt 1 2 a0 2 yt 2 3 t 3
. . . . . . . . . . . . . . . . . . . . . .
(4.26)
a0 (1 2 ) yt yt 1 2 yt 2
Полученное выражение при выполнении условия 1 позволяет записать
модель скользящего среднего в виде авторегрессионного уравнения бесконечного порядка
k
a0
yt
yt k t .
1 k 1
(4.27)
Вычислим основные характеристики процесса МА(1):
E( yt ) a0 ;
(4.28)
0 Var ( yt ) E[( t t 1 ) 2 ] 2 (1 2 ) ;
(4.29)
1 Cov yt , yt 1 E[ t t 1 t 1 t 2 ] 2 .
(4.30)
Получаем, что коэффициент автокорреляции первого порядка равен
1
.
(4.31)
2
0
1
Причем для остальных k 1 все rk 0 . Частные коэффициенты автокорреr1
ляции в соответствии со значениями коэффициентов авторегрессии (4.31) затухают по экспоненте.
Если проделать аналогичные вычисления для процесса МА(q), то получим, что его автокорреляционные коэффициенты rk 0 для k q , т.е. их
поведение аналогично поведению частных коэффициентов автокорреляции
71
процесса AR(q). В то же время значения частных коэффициентов автокорреляции МА(q) процесса затухают по экспоненте точно так же как значения коэффициентов автокорреляции процесса AR(q).
Теперь перейдем к комбинированию процессов AR и МА. Модель простейшего смешанного процесса ARMA(1,1) может быть записана следующим
образом:
(4.32)
yt a1 yt 1 a0 t t 1 , t ~ iid (0, 2 ) .
Если выполняется 1 1 и 1 , то, как и в случае процессов AR(1) и
MA(1), процесс ARMA(1,1) является стационарным и обратимым.
Вычислим основные характеристики этого процесса. Для этого выполним рекуррентные преобразования уравнения (4.32), предварительно перенеся в правую часть a1 yt 1
yt a0 a1 yt 1 t t 1
a0 t t 1 a1a0 a1 yt 2 t 1 t 2
a0 t t 1 a1a0 a12 yt 2 a1 t 1 t 2
a0 a1a0 t t 1 a1 t 1 t 2
a12 a0 a1 yt 3 t 2 t 3
a0 a1a0 a12 a0 t t 1
a1 t 1 t 2 a12 t 2 t 3 a13 yt 3
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
a0 1 a1 a12 t t 1
a1 t 1 t 2 a12 t 2 t 3
a
0 t t 1 a1 t 1 t 2
1 a1
a12 t 2 t 3 .
(4.33)
Используя полученное выражение, вычислим математическое ожидание
процесса ARMA(1,1)
E yt
a0
.
1 a1
(4.34)
Для вычисления дисперсии получим развернутое представление квадрата отклонения yt от математического ожидания через случайную составляющую
yt E yt 2
2
t2 2 t21 a12 t21 2 t2 2 a14 t2 2 2 t23
a1 t21 a12 a1 t2 2 a14 a1 t2 3
t t 1 a1 t 1 t 2 a12 t 2 t 3
72
t2 2 t 1 a1 t21 a12 t21 2 t2 2 a1 t2 2
a14 t2 2 2 t23 a1 t23 .
(4.35)
Отметим, что в данном выражении не учтены те слагаемые, которые в
силу свойства случайной составляющей t должны обратиться в ноль при
взятии математического ожидания.
Математическое ожидание выражения (4.35) дает нам дисперсию процесса ARMA (1,1)
0 Var ( yt ) E yt E yt 2
1 a1
2
2
1 a12
a14
2 1
2
a1
1 a12
.
(4.36)
Наконец, для вычисления ковариации вычислим произведение, опустив
в нем по аналогии с процедурой вычисления дисперсии те члены, которые
при взятии математического ожидания должны обратиться в ноль
yt E yt yt 1 E yt
( t t 1 a1 t 1 t 2
a12 t 2 t 3 a13 t 3 t 4 )
( t 1 t 2 a1 t 2 t 3
a12 t 3 t 4 a13 t 4 t 5 )
t21 a1 t21 a1 2 t2 2 a12 t2 2
a12 t2 2 a13 t2 2 a13 2 t2 3 a14 t2 3
a14 t2 3 a15 t2 3 a15 2 t2 4 a16 t2 4
a1 t21 a1 2 t2 2 a12 t2 2 t21
a14 a1 t2 3 a1 2 t2 4 a12 t2 4 t2 3 .
a12 a1 t2 2 a1 2 t23 a12 t23 t2 2
(4.37)
После взятия математического ожидания получаем ковариацию первого
порядка процесса ARMA (1,1)
1 E yt E yt yt 1 E yt
2 a1 a1 2 a12 1 a12 a14
2 a1 1 a1 1 a1 1 a12 a14
1 a1 a1 .
2
2
1 a1
(4.38)
Ковариации более высоких порядков ( k 1 ) могут рассчитываться в соответствии с рекуррентным соотношением
k Cov Yt , Yt k a1 k 1 a1k 1 1 .
(4.39)
73
Разделив ковариацию на дисперсию, получим коэффициент автокорреляции для процесса ARMA (1, 1)
r1
1 1 a1 a1
,
0
1 2 2a1
rk a1k 1r1 .
(4.40)
Это представление свидетельствует о том, что коэффициенты автокорреляции ARMA (1, 1) ведут себя так же, как коэффициенты автокорреляции процесса AR(1). Этот вывод можно обобщить на случай процесса ARMA (p, q),
для которого первые p значений автокорреляционных коэффициентов определяются взаимодействием AR и АМ компонент, а дальнейшее их поведение
такое же, как в процессе AR (p).
Аналогичный вывод можно сделать для частных коэффициентов автокорреляции процесса ARMA (p, q). Они убывают точно так же, как частные
коэффициенты автокорреляции процесса МА (q).
4.9. Построение моделей ARIMA
Построение моделей ARIMA осуществляется в несколько этапов.
1. На первом этапе проводится идентификация модели. Для этого ряд тестируется на стационарность с целью определения степени его интеграции.
Для тестирования используется критерий Дики – Фуллера (DF), с помощью
которого определяется, равно ли значение коэффициента 1 единице или оно
меньше единицы в модели без свободного члена
(4.41)
yt 1 yt 1 t .
Если 1 равно единицы, то данные имеют единичный корень и степень
его интеграции равно единице, т.е. степень интеграции равна единице, и мы
имеем дело с рядом I(1). Если же 1 меньше единицы, то ряд стационарен,
т.е. I(0). Суть критерия сводится к проверке нулевой гипотезы
H0 : 1 0 ,
(4.42)
H A : 1 значительно меньше нуля.
Нулевая гипотеза отвергается, если статистика DFрасч 1 / S меньше критического значения из таблиц Дики и Фуллера, которое для 1%-го уровня значимости равно -2,58 (для 5%-го уровня значимости равно -1,95). Используемый в этом критерии параметр 1 1 1, а S – стандартная ошибка 1 , а
1
1
само 1 определяется как параметр уравнения
(4.43)
yt yt 1 t .
Проверка на стационарность похожа на использование традиционного tкритерия, однако применение t-критерия слишком часто отвергает нулевую
гипотезу в ситуациях, когда она справедлива. Кроме того, проверка стационарности осложняется в тех случаях, когда существует автокорреляция
остатков. Проблема автокорреляции остатков решается применением расширенного критерия Дики – Фуллера (EDF), в котором критическое значение, с
74
которым сравнивается DF расч 1 / S , определяется по формуле, учиты1
вающей размер выборки
EDF 0
1
T
2
T2
.
(4.44)
Значения составляющих (4.44) в зависимости от уровня значимости следующие:
0 2,57 (1%) или 1,94 (5%) ;
1 1,96 (1%) или 0,398 (5%) ;
2 10,04 (1%) или 0 (5%) .
Если нулевая гипотеза проверяется для модели со свободным членом
(4.45)
yt 0 1 yt 1 t ,
то строится уравнение
(4.46)
yt 0 yt 1 t
и расчетное значение DF расч 1 / S 1 сравнивается с критическим значением EDF, рассчитываемым при
0 3,43 (1%) или 2,86 (5%) ;
1 6,00 (1%) или 2,74 (5%) ;
2 29,25(1%) или 8,36 (5%) .
В тех случаях, когда модель содержит и свободный член, и тренд
(4.47)
yt 0 1 yt 1 t t ,
то коэффициент 1 определяется по уравнению
(4.48)
yt 0 yt 1 t t ,
а критическое значение для проверки нулевой гипотезы рассчитывается при
0 3,96 (1%) или 3,41 (5%) ;
1 8,35 (1%) или 4,04 (5%) ;
2 47,44 (1%) или 17,83 (5%) .
Если в результате проверки на единичный корень нулевая гипотеза (ряд
нестационарный) принимается в качестве рабочей, то применяют операцию
взятия разности и повторяют тестирование.
2. После того, как получено подтверждение о стационарности исходного
временного ряда или его разностного представления, для стационарного ряда
строят выборочные автокорреляционные и частные автокорреляционные
функции, с помощью которых формулируются гипотезы о возможных порядках авторегрессии (р) и скользящего среднего (q).
Для каждой из выбранных в соответствии с выдвинутыми гипотезами
моделей оцениваются параметры и вычисляются остатки. Затем все построенные модели проверяются на адекватность и из моделей, адекватных данным, выбирается самая простая, т.е. та, которая имеет наименьшее количество параметров.
75
3. Методы для оценивания параметров выбираются в зависимости от
сложности модели. Если в модели присутствует только авторегрессионная
часть, то ее параметры можно оценивать с помощью МНК. Если же оцениваются параметры комбинированной модели, то возникают различные ситуации. Например, для модели ARMA (1, 1)
(4.49)
yt 0 1 yt 1 t t 1 , t ~ iid (0, 2 ) ,
которую можно представить, используя оператор сдвига L ( L t t 1 ) в
виде
yt 0 1 yt 1 L t ,
(4.50)
L 1 yt L 1 ( 0 1 yt 1 ) t ,
yt yt 1 2 yt 2
(4.51)
0
1 yt 1 yt 2 2 yt 3 ,
1
1
где L 1 L и L 1 L 2 L .
(4.52)
Одним из возможных подходов к построению моделей ARMA (1, 1) заключается в следующем: приравниваются нулю все значения, предшествующие началу наблюдений, т.е. y0 y1 y 2 0 . Тогда замена переменных
y1 y1, y2 y2 y1, . . . , yt yt yt 1 t 1 y1 (4.53)
позволяет записать рассматриваемую модель в виде
yt 0 1 yt1 t ,
0
.
1
(4.54)
В том случае, когда известно, параметры этой модели можно оценивать с помощью метода наименьших квадратов. В общем случае модель нелинейна по параметрам и для их оценки используется условный метод максимального правдоподобия или полный метод максимального правдоподобия. Оба метода фактически сводятся к решению нелинейных систем уравнений.
Эффективным приемом построения подобных моделей для прогнозных
целей является подход, основанный на подборе параметра * , обеспечивающего минимальную ошибку постпрогнозных расчетов. Этот подход является
составной частью построения адаптивных моделей прогнозирования и, поэтому будет подробно рассмотрен в главе, которая посвящена адаптивным
методам.
4.10. Проверка адекватности моделей ARMA
Для проверки адекватности моделей ARMA используются несколько
критериев. Прежде всего, в построенной модели с помощью обычного tкритерия можно проверить статистическую значимость ее параметров.
76
Кроме того, в соответствии с предположениями, лежащими в основе построения модели, случайные составляющие t являются белым шумом. Следовательно, остатки регрессии et , являющиеся оценками t , должны быть
одной из возможных реализаций белого шума, т.е. иметь нулевую автокорреляцию и нулевое среднее (если модель содержит константу). Поэтому выборочная автокорреляционная функция остатков, вычисляемая по формуле
rk
tn k 1 et et k
2
tn1 et
, k 1, 2, ,
(4.55)
при больших n имеет распределение, близкое к нормальному N 0,
значение rk окажется вне интервала 0
1
. Если
n
2
, то на 5%-м уровне значимости
n
отвергается гипотеза равенства его нулю.
Для проверки гипотезы о равенстве нулю сразу k первых значений автокорреляционной функции остатков используется уже известная нам Qстатистика Бокса – Пирса, вычисляемая по формуле
m
Q n rk2 .
k 1
(4.56)
Смысл проверки тот же самый, только проверяется автокоррелированность остатков, а не моделируемого показателя. При нулевой гипотезе, предполагающей отсутствие автокорреляции в остатках, статистика Q имеет распределение 2 m . Если расчетное значение Q-статистики превосходит соответствующее значение 2 , то нулевая гипотеза отвергается.
Если тесты показывают наличие автокорреляции в остатках, то рассматриваемая модель ARMA неадекватна, ее необходимо модифицировать.
В тех случаях, когда одновременно несколько моделей ARMA, оказываются адекватными данным, то среди построенных моделей рекомендуется
выбирать наиболее простую модель, содержащую наименьшее количество
параметров.
Во многих компьютерных пакетах рассчитывается значение критерия
Акаике (AIC) по формуле
n et2
pq
AIC
ln t 1 ,
n
n
(4.57)
в которой комбинируются два требования к модели: сложность и точность
(более сложной считается модель с большим числом параметров). В соответствии с этим критерием выбирается та модель, для которой значение AIC
меньше.
Для этих же целей используется критерий Шварца
77
n et2
( p q) ln n
ShC
ln t 1 .
n
n
(4.58)
Оба критерия позволяют выбрать более сложную модель только в том
случае, когда ее точность значительно превосходит точность менее сложной.
4.11. Оценка точности прогнозных расчетов по моделям ARIMA
Как известно, основное предназначение моделей ARIMA – прогнозные
расчеты. При выполнении этих расчетов возникает естественный вопрос об
оценке точности получаемых прогнозных значений. Ошибки в прогнозных
расчетах неизбежны. По крайней мере, есть два источника, порождающих
эти ошибки. Первый – невозможность предугадать уровень случайной составляющей в будущих значениях прогнозируемого показателя, второй –
отклонение оценок коэффициентов авторегрессионной модели, полученных с
помощью МНК, от их истинных значений. Рассмотрим ситуацию, когда оценивается точность прогнозных расчетов в рамках теоретической модели процесса ARIMA (1,0,1)
(4.59)
yt a0 a1 yt 1 t 1 t 1
в зависимости от первого источника.
Прогнозная оценка для периода t 1 может быть представлена в виде
(4.60)
yˆt 1 a0 a1 yt t ,
а ее ошибка получается путем вычитания (4.60) из (4.59)
(4.61)
et 1 yt 1 yˆt 1 t 1 .
Таким образом, дисперсия прогноза на один шаг вперед равна дисперсии
случайной составляющей
Var (et 1 ) Var ( t 1 ) 2 .
Прогнозная оценка для периода t 2 представима в виде
yˆt 2 a0 a1(a0 a1 yt t ) .
(4.62)
(4.63)
Вычтя прогнозную оценку из уравнения
yt 2 a0 a1(a0 a1 yt t t 1) t 1 t 2 ,
(4.64)
получаем ошибку прогноза
et 2 yt 2 yˆt 2 t 2 t 1(a1 ) ,
(4.65)
дисперсия которой равна
Var (et 2 ) 2 (1 (a1 ) 2 ) .
(4.66)
Последовательно продолжая рекуррентное вычисление прогнозных оценок,
можно получить выражение
yˆt k a0 (1 a1 a12 a13 ) a1k Yt a1k 1 t
a
0 a1k yt a1k 1 ,
1 a1
(4.67)
78
из которого следует, что в случае стационарности ( a1 1 ) и обратимости
( 1 ) процесса прогноз стремится к среднему a0 /(1 a1 ) . Этот факт
позволяет сделать вывод, что дисперсия прогнозной ошибки
(4.68)
et k yt k yˆt k
в пределе при k стремится к дисперсии ARMA (1,1), так как
yt k yˆt k yt k
(4.69)
k
и дисперсия предельной ошибки ни что иное, как известная нам дисперсия
процесса ARMA (1,1)
Var yt k
1 2 2a1
1 a12
.
(4.70)
5. АДАПТИВНЫЕ МОДЕЛИ ПРОГНОЗИРОВАНИЯ
5.1. Специфика адаптивного моделирования
экономических процессов
Сложность и динамичность, а также высокий уровень неопределенности,
являясь характерными свойствами экономических процессов, порождают
специфические условия, которые необходимо учитывать при разработке прогнозных моделей. Эта специфичность должна быть определяющей как при
выборе адаптивных моделей и алгоритмов для проведения конкретных прогнозных расчетов, так и в работе по дальнейшему совершенствованию подходов, основанных на применении принципов адаптации в экономических
исследованиях. Поэтому среди большого разнообразия методов адаптивного
управления и предсказания широкое распространение в экономических приложениях получили только те, которые в наибольшей мере удается приспособить к требованиям этой специфики.
В настоящее время наибольшей популярностью у специалистов пользуются модели, адаптивный механизм которых построен на основе использования процедуры экспоненциального сглаживания. Модели с подобным механизмом находят применение как при решении прикладных задач, так и в теоретических построениях. И дело здесь не только и не столько в простоте идеи
и удобстве вычислительной схемы, хотя и это играет определенную роль.
Скорее, успех объясняется тем, что с ее помощью удается построить эффективный механизм корректировки коэффициентов прогнозной модели в ситуациях, когда специфичность условий экономического развития проявляется
отсутствием информации, по которой можно было бы определить закономерность, лежащую в основе структурных изменений модели. Конечно, с подобной ситуацией приходится сталкиваться и в технических приложениях, но
все же характерной, а практика решения задач перспективного анализа не
79
оставляет места сомнениям по этому поводу, она является для приложений
экономического плана.
Отсутствие информации может быть компенсировано только использованием правдоподобных предположений о характере поведения модели в ответ на качественные изменения в развитии моделируемых процессов. Пожалуй, самой простой и вполне естественной для экономических процессов является гипотеза, в основу которой положено предположение о том, что в моделях, отражающих эти закономерности, с течением времени происходит
сравнительно медленное изменение структурных коэффициентов. Фактически это предположение непосредственно вытекает из анализа результатов
одновременного проявления динамичности и инерционности экономических
систем, так как именно одновременное действие ограничивает яркое проявление только одного из этих свойств, исключая тем самым применение как
моделей с постоянными коэффициентами, так и моделей с резко изменяющимися свойствами. Удобным инструментом для практической реализации
этой гипотезы как раз и явился метод экспоненциального сглаживания.
Применение метода экспоненциального сглаживания в краткосрочном
прогнозировании получило широкое распространение после выхода работ
П. Винтерса, Р. Брауна, Р. Майера, в которых дано его обоснование для случая моделей полиномиального типа. Учитывая этот факт в истории развития
методов адаптивного прогнозирования экономических процессов, рассмотрим основные принципы их построения на примере модели, представляющей
собой полином нулевого порядка
(5.1)
xt at t ,
где xt – значение показателя, характеризующего уровень прогнозируемого
процесса в момент времени t ;
at – изменяющийся во времени параметр, характеризующий средний уровень прогнозируемого процесса в момент времени t ;
t – случайные независимые отклонения фактических значений от текущего среднего, имеющие нулевое математическое ожидание и конечную
дисперсию 2 .
Согласно этой модели расчетная величина прогнозного значения xˆt 1
полагается равной оценке параметра ât , т.е.
xˆt 1 aˆt .
(5.2)
В свою очередь, за оценку текущего значения параметра ât принимается
экспоненциальная средняя St , рассчитываемая по рекуррентной формуле
St xt (1 ) xt 1 (1 ) 2 xt 2
xt (1 )[xt 1 (1 ) xt 2 ]
xt (1 )St 1
где St – значение экспоненциальной средней в момент t ;
– параметр сглаживания, 0 1 .
(5.3)
80
Фактически схема расчета прогнозной величины xˆt 1 задается рекуррентной формулой (5.3), в которой при определении текущей средней используется механизм старения данных по экспоненциальному закону, позволяющий построить прогнозную траекторию с преобладанием тенденций последнего периода. Причем степень этого преобладания может регулироваться
параметром . Чем ближе к 1, тем меньше прогнозная оценка отличается
от последнего наблюдения.
Для экономических процессов такой механизм хорошо согласуется с интуитивным представлением о характере взаимосвязи будущего их состояния
с достигнутыми уровнями предшествующих периодов и, по сути, является
адаптивным. Чтобы выяснить сущность принципов, положенных в основу
адаптивного механизма рассматриваемой модели, перепишем (5.3) в виде
(5.4)
St St 1 ( xt St 1) .
Если теперь St 1 рассматривать как величину прогнозного значения для
момента t , то в выражении (6.4) разность ( xt St 1) представляет собой погрешность прогноза. Эта погрешность учитывается в качестве корректирующего слагаемого при расчете нового прогнозного значения xˆt 1 St . Таким
образом, в вычислительной схеме экспоненциального среднего используется
принцип регулятора с обратной связью, что позволяет говорить об адаптивных свойствах модели (5.1).
Таким образом, экспоненциальное сглаживание лежит у истоков адаптивных методов, а сущность этих методов прогнозирования можно раскрыть
следующим образом: «Адаптивными называются методы прогнозирования,
позволяющие строить самокорректирующиеся (самонастраивающиеся) экономико-математические модели, способны оперативно реагировать на изменение условий путем учета результата прогноза, сделанного на предыдущем
шаге, и учета различной информационной ценности уровней ряда»1.
5.2. Полиномиальные модели
Развитием простейшей модели (5.1) можно считать полином первого порядка
(5.5)
xt a1t a2t t ,
где a1t , a2t – текущие значения коэффициентов модели;
– период упреждения;
t – случайные независимые отклонения расчетных от фактических,
имеющие нулевое математическое ожидание и конечную дисперсию 2 .
Его структура в отличие от полинома нулевой степени способна адекватно отражать тенденцию линейного роста исследуемого процесса. Это позволяет избавиться от систематической ошибки, которая как отмечалось в
Дуброва Т.М. Статистические методы прогнозирования: Учеб. пособие для вузов / Т.А. Дуброва. – М.:
ЮНИТИ-ДАНА, 2003. – С. 116.
1
81
предыдущей главе, имеет место при использовании экспоненциальной средней в качестве прогнозной модели подобных процессов.
Одновременно с изменением структуры модели, как правило, претерпевает соответствующие изменения и ее адаптивный механизм. Неизменным
может оставаться только принцип его построения. Причем, для одной и той
же модели на основе одного того же принципа можно строить различные варианты адаптивных механизмов. Примером модели, для которой можно построить различные варианты адаптивных механизмов как раз и является рассматриваемый адаптивный полином первой степени (5.5). Одним из вариантов ее адаптивного механизма был предложен Ч. Хольтом. Этим вариантом
предусматривается расчет оценок текущих (т.е. на данный момент времени)
коэффициентов модели по двум рекуррентным соотношениям
(5.6)
aˆ1t 1xt (1 1 )(aˆ1t 1 aˆ2t 1 ) ,
(5.7)
aˆ2t 2 (aˆ1t aˆ1t 1 ) (1 2 )aˆ2t 1,
где 1 , 2 – параметры экспоненциального сглаживания (0 1, 2 1) .
Если через t xt xˆt обозначить ошибку прогноза, то эти соотношения можно переписать в следующем виде:
(5.8)
aˆ1t aˆ1t 1 aˆ2t 1 1 t ,
(5.9)
aˆ2t aˆ2t 1 1 2 t ,
Полученное представление показывает, что используемая в рекуррентных соотношениях (5.6), (5.7) процедура экспоненциального сглаживания
приводит как и в случае полинома нулевой степени к адаптивному механизму, построенному на принципе регулятора с обратной связью.
Р. Брауном для этой же модели предложен другой вариант адаптивного
механизма
(5.10)
aˆ1t aˆ1t 1 aˆ2t 1 (1 2 ) t ,
aˆ2t aˆ2t 1 (1 ) 2 t ,
(5.11)
в котором использован только один параметр адаптации , интерпретируемый как коэффициент дисконтирования, показывающий степень обесценивания наблюдений по истечению единичного периода времени. Вариант Брауна
проще для программной реализации на ЭВМ, так как расчеты значительно
сокращаются. Это сокращение получается в силу того, что механизм адаптации по этому варианту требует оптимальной настройки всего одного параметра и практически не уступает в точности предсказания многопараметрическим моделям.
Однако несмотря на ряд замечательных свойств, остающаяся довольно
простой структура этой модели не гарантирует адекватного отражения всего
многообразия закономерностей развития экономических процессов. Ее адаптивный механизм не обладает такой гибкостью, чтобы полностью компенсировать рассогласованность между моделью и реально протекающим процессом, порождаемую неадекватностью. Причем, в тех случаях, когда в структуре модели не находят своего отражения закономерности прогнозируемого
82
процесса, имеющее место запаздывание в корректирующих воздействиях
адаптивного механизма приводит к тому, что обновление коэффициентов
модели обеспечивает только локальное улучшение ее аппроксимационных
свойств, которые не гарантируют соответствующего повышения точности
прогнозных расчетов. Все это, конечно, сужает область возможных применений простейших моделей в практике перспективного анализа.
В основе дальнейшего развития и обобщения моделей полиномиального
типа лежит доказанная Р. Брауном и Р. Майером фундаментальная теорема
экспоненциального сглаживания. С ее помощью удается расширить класс
адаптивных моделей, в которых используется принцип экспоненциального
сглаживания, до множества полиномов произвольной степени
xt a0 a1
2
2!
2
ap
P!
p t
p
ai i
t .
i 0 i!
(5.12)
Для определения неизвестных коэффициентов a0 , a1, , a p делается
предположение о том, что полином, представляющий детерминированную
часть выражения (6.12), можно представить в точке 0 в виде ряда Тейлора
xˆt
xt( k )
k 0
k!
p
xt( k )
k 0
k!
p
ak
k 0
k!
,
(5.13)
где xt(k ) – k -я производная, вычисленная в точке 0 .
Используя обобщенное понятие экспоненциальной средней n -го порядка
(5.14)
St[ n] St[ n 1] (1 )St[n1] , n 1, 2,, p,
величина которой определяется по известным начальным значениям
S0[1] , S0[ 2] , , S0[ p ] и St[0] xt , Р. Браун и Р. Майер в своей фундаментальной
теореме показали, каким образом коэффициенты связаны с обобщенными
экспоненциальными средними соотношениями
ak n k
(n 1 j )!
(1)
,
j (1 ) j
k
!
(
n
1
)!
j
!
k 0
j 0
представляющими линейную систему из p 1 уравнения.
St[ n]
p
k
(5.15)
Для полиномов невысокой степени, а в практике прогнозных расчетов,
как правило, используются полиномы не выше второй степени, решение системы (5.15) можно выразить в явном виде через обобщенные экспоненциальные средние. Необходимые для расчета экспоненциальных средних
[ p]
начальные значения S 0[1] , S 0[ 2] , , S 0 получаются из правой части (5.15)
заменой ak оценками метода наименьших квадратов.
Адаптивная полиномиальная модель нулевого порядка, получаемая из
(5.15), полностью совпадает с моделью первого порядка p 1 при задан-
83
ных с помощью оценок метода наименьших квадратов aˆ 0,0 , aˆ1,0 начальных
значениях
S [01] aˆ 0,0
(1 )
S [02] aˆ 0,0
aˆ 1,0 ,
2(1 )
(5.16)
aˆ 1,0
(5.17)
и определяется системой рекуррентных соотношений. По этим рекуррентным соотношениям вычисляются экспоненциальные средние
St[1] xt (1 ) St[1]1 ,
(5.18)
St[ 2] St[1] (1 ) St[21]
(5.19)
и соответствующие коэффициенты адаптивного полинома
aˆ0,t 2St[1] St[ 2] ,
aˆ1,t
( St[1] St[ 2] ) .
1
(5.20)
(5.21)
Полученные коэффициенты подставляются в полином, и расчет прогнозных значений осуществляется с помощью следующего выражения:
xˆt aˆ0,t aˆ1,t
(2
) St[1] (1
) St[ 2] .
1
1
(5.22)
Аналогично определяется адаптивная полиномиальная модель второго
порядка ( p 2 ). С помощью оценок метода наименьших квадратов
aˆ0,0 , aˆ1,0 , aˆ 2,0 задаются начальные условия
(1 )(2 )
aˆ 2,0 ,
2 2
2(1 )
(1 )(3 2 )
aˆ 0,0
aˆ 1,0
aˆ 2,0 ,
2
S0[1] aˆ 0,0
S0[ 2]
1
aˆ1,0
(5.23)
(5.24)
3(1 )
3(1 )(4 3 )
S0[3] aˆ 0,0
aˆ 1,0
aˆ 2,0
2 2
(5.25)
и рекуррентно рассчитываются экспоненциальные средние
St[1] xt (1 ) St[1]1 ,
(5.26)
St[ 2] St[1] (1 ) St[21] ,
(5.27)
St[3] St[ 2] (1 ) St[31] ,
(5.28)
по которым находятся коэффициенты полинома
(5.29)
aˆ0,t 3St[1] 3St[ 2] St[3] ,
aˆ1,t
(6 5 ) St[1] 2(5 4 ) St[ 2] (4 3 ) St[3] , (5.30)
2
2(1 )
84
aˆ2,t
2
S [1] 2 St[ 2] St[3] .
2 t
(1 )
(5.31)
Прогноз рассчитывается по параболе следующего вида:
1
xˆt aˆ0,t aˆ1,t aˆ2,t
2
2
2
2
St[1]
6(1 ) 2(6 5 )
2(1 )
2 2
6(1 ) 2(5 4 ) 2
2 2
2(1 ) (4 3 )
2 2
St[ 2]
2(1 ) 2
St[3]
.
2(1 ) 2
(5.32)
В адаптивном механизме этих моделей, хотя и не в явной форме, также
использован принцип регулятора с обратной связью. На этом принципе построен расчет обобщенных экспоненциальных средних, линейная комбинация которых, как видно из (5.22), (5.32), принимается за величину прогнозного значения.
5.3. Рекуррентный метод наименьших квадратов
Прежде чем рассмотреть адаптивные многофакторные модели, приведем
схемы рекуррентного метода наименьших квадратов (РМНК), лежащих в основе построения этих моделей. Благодаря совместному использованию рекуррентной схемы оценивания и процедуры экспоненциального сглаживания
удается построить прогнозные модели, в которых, по сути, реализованы основные принципы адаптации.
Изложим сначала одношаговую схему РМНК. Для этого введем следующие обозначения:
n – объем выборочной совокупности;
m – число независимых переменных моделей;
xi 1, xi1, , xim – i -я вектор-строка независимых переменных;
1 x11 x1m
1
x
x
21
2m
–( n x (m+1))-матрица из независимых переменных.
Xn
1 xn1 xnm
Чтобы понять, как формируется матрица системы нормальных уравнений, запишем выражение для произведения вектора-столбца на векторстроку
85
1
1
x
x
xt x t t1 1 xt1 xtm t1
xtm
xtm
xt1
xt21
x1t xtm
xtm
xt1 xtm
.
2
xtm
Используя данное представление, можно записать схему вычисления
матрицы системы нормальных уравнений следующим образом:
n
xi1
xi1
xi21
Xn X n
xim xi1 xim
x11
1
2
x11
x11
x1m x11 x1m
xn1
1
xn21
xn1
xnm xn1 xnm
xim
xi1 xim
2
xim
x1m 1
x21
x2 m
2
x11 x1m x21
x21
x21 x2m
x1m x2 m x21 x2m
x22m
xnm
xn1 xnm
x1 x1 x2 x 2 xn x n .
2
xnm
Такая схема формирования матрицы Xn X n делает понятным запись
Xn 1Xn 1 xn xn Xn Xn .
Аналогично можно записать
Xn 1y n 1 xn yn Xn y n ,
где y n – вектор-столбец из n зависимых переменных.
Рассмотрим линейную регрессионную модель
y Xb ε ,
(5.33)
где b – вектор-столбец коэффициентов модели,
ε – вектор-столбец ненаблюдаемых случайных составляющих.
Предположим, что уже получены оценки ее коэффициентов bˆ n 1 по
данным выборочной совокупности из ( n 1 ) наблюдения. Требуется в ситуации, когда в выборочную совокупность добавлено новое наблюдение
( yn , x n ) , пересчитать оценки коэффициентов регрессии, используя для этого
ранее полученные оценки bˆ n 1 . Такие ситуации возникают при обработке
очень больших массивов данных, когда их хранение вызывает определенные
затруднения, а также, как уже отмечалось, в тех случаях, когда по смыслу
решаемой задачи требуется последовательная обработка вновь поступающих
наблюдений.
86
В рассматриваемой ситуации формулу для вычисления вектора оценок
коэффициентов регрессионной модели можно записать следующим образом:
1
bˆ n Xn Xn Xn y n
1
Xn1Xn1 xn x n Xn1y n1 xn yn .
Для удобства обозначим
(5.34)
Сn Xn Xn .
Далее будем использовать формулу Шермана – Моррисона для рекуррентного обращения матриц
Сn 1 xn x n
1
Cn11
Cn11xn x nCn11
.
x nCn11xn 1
(5.35)
Используя формулу (5.35), выражение (5.34) можно переписать в виде
1
1
ˆb n C n11 C n 1xn x n C n 1 Xn 1y n 1 xn y n
x n C n11xn 1
Cn11xn x nCn11
1
ˆ
Xn 1y n 1 xn y n
b n 1 Cn 1xn y n
1
x nCn 1x n 1
Перегруппируем члены полученного выражения
Cn11xn x nCn11
Cn11xn x nCn11
1
ˆ
b n 1 Cn 1xn y n
xn y n
Xn 1y n 1
x n Cn11xn 1
x nCn11xn 1
Объединив второй и третий члены и вынеся общие множители С n 11xn и
y n , а также, выполнив умножение в последнем члене выражения, получаем
x n C n11xn
C n11xn
1
ˆ
b n 1 C n 1xn 1
x n bˆ n 1
y n
1
1
x n C n 1xn 1
x n C n 1xn 1
Окончательно, выполнив приведение к общему знаменателю в квадратных скобках, получаем
bˆ n 1
C n11xn
y n x n bˆ n 1 .
1
x n Cn 1xn 1
(5.36)
Полученная формула позволяет осуществлять пересчет оценок рекуррентно по мере появления новых наблюдений. С ее помощью реализуются
основные идеи построения адаптивных многофакторных регрессионных моделей.
Перейдем к изложению схемы многошагового РМНК. Применение многошаговой процедуры возникает в тех ситуациях, когда выборочная совокупность пополняется одновременно несколькими наблюдениями. В принципе
эти наблюдения можно обработать последовательно с помощью рассмотренной выше одношагового РМНК. Однако не всегда такой подход удобен.
Кроме того, при настройке параметров адаптивной модели в некоторых случаях возникает необходимость учитывать информацию, полученную в ре87
зультате нескольких одновременно проведенных измерений. Поэтому имеет
смысл обратиться к многошаговой процедуре.
Введем дополнительные обозначения:
X k – матрица из k последних строк независимых переменных выборочной совокупности;
y k – вектор-столбец, компонентами которого являются k последних
наблюдений зависимой переменной;
I k – (k x k)-единичная матрица.
Используя прием, аналогичный рассмотренному выше, запишем формулу для расчета вектора оценок коэффициентов регрессионной модели следующим образом:
bˆ n Xn X n 1 Xn y n
Xn k X n k Xk X k 1 Xn k y n k Xk y k .
Для удобства обозначим
(5.37)
С Xn k Xn k .
Используя формулу Шермана – Моррисона – Вутбери
С Xn k X n k 1 C1 C1Xk X k C1Xk I k
1
X k C 1 ,
(5.38)
перепишем выражение (5.37), заменив в нем обратную матрицу на (5.38), и
проведем ряд очевидных преобразований полученного выражения
1 Xk C1]Xn k y n k Xk y k
1
bˆ n k C 1Xk y k C 1Xk X k C 1Xk I k X k bˆ n k
1
С 1Xk X k C 1Xk I k X k C 1Xk y k I k y k I k y k
1
bˆ n k C 1Xk y k C 1Xk X k C 1Xk I k X k C 1X k I k y k
1
1
C 1Xk X k C 1Xk I k y k C 1Xk X k C 1Xk I k X k bˆ n k
bˆ n [C 1 C 1Xk X k C 1Xk I k
Результат перемножения в третьем члене взаимоуничтожается со вторым членом, а вынесение общего множителя из четвертого и пятого членов
приводит к рекуррентной форме
bˆ n k C 1 Xk X k C 1 Xk I k
1[y k X k bˆ nk ] .
(5.39)
С помощью полученной формулы осуществляется рекуррентный пересчет оценок в тех случаях, когда новые наблюдения появляются не по одному, а целыми группами сразу.
5.4. Многофакторные адаптивные модели
Необходимость применения принципов адаптации при построении многофакторных моделей возникает тогда, когда есть основание считать, что
степень влияния факторов на моделируемый показатель зависит от времени,
т.е. когда для достижения адекватности реальному процессу требуется мо88
дель с изменяющимися во времени коэффициентами. В общем случае такую
модель можно записать в виде
(5.40)
yt xt bt t , t 1, 2, , T ,
где yt значение зависимой переменной (показателя) в момент t ;
xt ( x1t , x2t , , xmt ) m -мерная вектор-строка значений независимых
переменных (факторов) в момент t ;
bt (b1t , b2t , , bmt ) m -мерный вектор-столбец оцениваемых коэффициентов модели, изменяющих с течением времени свои значения по неизвестному закону;
t ненаблюдаемая случайная ошибка.
Для удобства записи свободный член модели (5.40) отдельно не выделяется, но неявно считается, что первая компонента вектор-строки независимых переменных тождественно равна единице, т.е. является фиктивной переменной ( xt 1, t 1, 2, , T ) .
Чтобы учесть изменяющийся характер коэффициентов, делается предположение о том, что каждый набор текущих значений этих коэффициентов
может обеспечивать высокую точность аппроксимации только текущим и
близким к ним наблюдениям, оставляя ее низкой для более ранних наблюдений. Фактически, в рамках теории регрессионного анализа это предположение эквивалентно гетероскедастичности, т.е. случаю, когда в отличие от
стандарта (гомоскедастичности) соотношение
i2 , i j
M ( i j )
0, i j
(5.41)
определяет ковариационную матрицу, которая, хотя и является диагональной, но с неравными между собой диагональными элементами, причем
i2 2j при i j . Для того чтобы выровнять точность аппроксимации по
всему рассматриваемому промежутку времени и тем самым как бы свести
рассматриваемую задачу к обычной схеме регрессионного анализа, вводится
в рассмотрение весовая функция. Удобной для этих целей признана весовая
функция вида
f(t , j , )
t j
, 0 1,
(5.42)
с помощью которой осуществляется экспоненциальное сглаживание отклонений.
В условиях неравнозначности наблюдений при заданных значениях весовой функции (5.42) вектор оценок коэффициентов bˆ t ( ) для любого
t T1, T при T1 m можно получить как решение экстремальной задачи
bˆ t ( ) Arg min
t
t j[ y j x j bt ( )]2 ,
(5.43)
j 1
89
функционал которой представляет собой экспоненциально взвешенную сумму отклонений расчетных значений от фактических.
Модель с коэффициентами, полученными как результат решения задачи
(5.43), в силу смещения точности аппроксимации к наблюдениям с высокими
весовыми коэффициентами позволяет учитывать при расчете прогнозных
значений в основном только те тенденции, которые проявляются в последних наблюдениях. И если последовательно для каждого t [T1, T ] осуществляется построение такой модели, то мы имеем дело с текущим регрессионным анализом. Текущий регрессионный анализ позволяет проследить за
динамикой коэффициентов регрессии и выяснить ее характер, что в общем-то
и требуется при решении динамической задачи.
Приведем подробный вывод расчетных формул рекуррентной схемы метода наименьших квадратов. Для этого продифференцируем функционал задачи (5.43) по компонентам вектора bt ( ) , приравняем полученное выражение к нулю, и после очевидных преобразований запишем схему уравнений в
следующем виде:
t
j 1
t j
xj x j bt ( )
t
j 1
t j
y j xj .
(5.44)
Введем матричные обозначения
t 1
y1
x11 x12 x1m
0
0
y
x
t 2
x22 x2m
0
0
2
21
,
,
Lt
y t , Xt
0
y
x
x
x
0
t2
tm
t
t1
0
где y t вектор-столбец с компонентами, равными значениям прогнозируемого показателя в последовательные моменты времени;
Xt матрица с элементами, равными значениям факторов в последовательные моменты времени;
Lt диагональная матрица весовых коэффициентов.
Тогда, используя введенные обозначения, систему (5.44) можно переписать в более компактной форме
(5.45)
Xt Lt bt ( ) Xt Lt y t .
Разрешая систему (5.45) относительно bt ( ) , получаем выражение для
вектора оценок
bˆ t ( ) Xt Lt Xt
1
(5.46)
Xt Lt y t .
Теперь, чтобы выразить текущие оценки bˆ t ( ) через оценки предыдущего периода bˆ t 1 ( ) и текущее наблюдение, в качестве которого будем
рассматривать значения зависимой переменной yt и вектора независимых
90
переменных xt в момент времени t , представим решение (5.46) в виде,
удобном для проведения дальнейших преобразований.
(5.47)
bˆ t ( ) [ Xt 1Lt 1Xt 1 xt xt ] [ Xt 1Lt 1y t 1 xt yt ] .
Далее, вводя обозначения
Ct 1 Xt 1Lt 1Xt 1
и используя формулу Шермана – Моррисона для рекуррентного обращения
матриц, выражение для вектора оценок перепишем следующим образом:
1
1
C
x
x
C
1
1
t
1
t
t
t
1 X L Y
1
bˆ t ( ) Ct 1
t 1 t 1 t 1 xt yt .
1
1
x C x 1
t t 1 t
(5.48)
Произведя почленное перемножение, получаем
bˆ t ( ) bˆ t 1 ( ) 1 Ct11xt yt
1 Ct11xt x t Ct11
x t Ct11xt
Xt 1Lt 1y t 1 xt yt .
(5.49)
Перегруппировав члены полученного выражения и вынеся общий множитель
1
Ct11xt , имеем
1
ˆbt ( ) bˆ t 1 ( ) 1 Ct11xt 1 xt Ct 1xt yt
1
xt Ct 1xt
Ctt 1xt
x bˆ ( ).
1 t t 1
xt Ct 1xt
(5.50)
Выполнив вычитание в квадратных скобках, окончательно получаем
bˆ t ( ) bˆ t 1 ( )
Ct11xt
xt Ct11xt
yt xt bˆ t 1( )..
(5.51)
Полученная формула совместно с рекуррентной формулой обращения
матриц позволяет по мере поступления новых данных ввести корректировку
коэффициентов регрессии, не прибегая к повторению всего объема вычислений, и по существу выполняет функции адаптивного механизма регрессионной модели (5.40). Если теперь соединить модель и ее адаптивный механизм,
то получается следующая запись адаптивной многофакторной модели:
(5.52)
yˆt xt bˆ t 1( ) ,
bˆ t ( ) bˆ t 1 ( )
Ct1
1
Ct11xt
yt
1
xt Ct 1xt
1 Ct11xt xt Ct11
Ct 1
.
1
x
C
x
t t 1 t
yˆ t ,
(5.53)
(5.54)
91
При заданных начальных значениях bˆ 0 ( ), C01 и известном значении
параметра сглаживания модель (5.52) – (5.54) позволяет по мере поступления «свежих» данных обновлять коэффициенты и с учетом этого обновления вести соответствующие расчеты прогнозных значений ŷt .
Как известно из практики эконометрического моделирования, построение многофакторных регрессионных моделей осуществляется в несколько
этапов:
1. Отбор факторов для включения в модель.
2. Определение наилучшей формы связи.
3. Расчет коэффициентов регрессии.
4. Проверка адекватности и практическое использование модели в анализе и прогнозных расчетах.
Этой схемы стараются придерживаться и при построении адаптивных
многофакторных моделей. Однако четкое представление о содержании этапов, их составе и порядке выполнения пока еще не сложилось. Поэтому имеет смысл говорить только о рекомендациях общего характера. Например,
можно в дополнение к выполняемым на этих этапах процедурам предусмотреть исследование возможных вариантов перераспределения с течением времени степени влияния факторов на моделируемый показатель, и окончательный их набор, включаемый в модель, формировать с учетом полученных результатов.
5.5. Адаптивные многошаговые модели
В моделях предыдущего параграфа используется одношаговый (по одному наблюдению) принцип обработки вновь поступающей информации.
Это приводит к чрезмерному влиянию последнего наблюдения на формирование величины прогнозного значения. Как показывает опыт, эффект последнего наблюдения негативно (снижается уровень точности) проявляется в
тех случаях, когда упреждение прогнозных расчетов превосходит единицу.
Этот нежелательный факт объясняется тем, что в каждом отдельном наблюдении текущего момента, по которому осуществляется корректировка модели, доля полезной информации о будущем по мере роста упреждающего периода снижается. Любые усложнения адаптивного механизма хотя и могут
привести к некоторому снижению этого эффекта, но полного решения этой
проблемы обеспечить не могут. Очевидно, что одношаговый принцип является ограничивающим фактором в расширении круга прогнозных задач, решаемых в рамках адаптивного подхода. В связи с этим возникает необходимость рассмотрения моделей, в которых используются другие принципы обработки вновь поступающих наблюдений. Разумный шаг в решении этой
проблемы заключается в том, чтобы построить алгоритмы, позволяющие для
корректировки коэффициентов модели на каждом шаге использовать вместо
одного несколько наблюдений.
92
Алгоритмы, в которых для корректировки коэффициентов модели используется более одного наблюдения, как отмечалось в предыдущем параграфе, в отличие от одношаговых, принято называть многошаговыми. Термин «многошаговый» может не совсем точно отражает суть обсуждаемой
процедуры, так как на самом деле в одном шаге многошаговой процедуры
одновременно реализуется несколько шагов одношаговой. И если многошаговый РМНК позволяет получить тот же самый результат, что и многократное применение процедуры одношагового РМНК, то для адаптивных моделей, что станет понятно из данного параграфа, это совсем не так.
Сначала познакомимся с особенностями построения адаптивной прогнозной модели на основе многошаговой рекуррентной схемы оценивания. В
качестве базовой, будем использовать многошаговую рекуррентную схему
МНК. Варианты конкретной реализации этой схемы могут отличаться с одной стороны количеством вновь поступающих на обработку наблюдений, а с
другой – способом формирования этих наблюдений в группу, которая принимается за порцию одновременно обрабатываемой информации. Ситуации,
когда порция состояла всего из одного наблюдения, были уже рассмотрены
ранее, теперь нас будут интересовать порции из нескольких наблюдений.
Учитывая, что в реальных ситуациях обновление динамических рядов, как
правило, осуществляется периодическим добавлением одного наблюдения
(годового, квартального, месячного и т.п.) построим вычислительную процедуру многошагового адаптивного алгоритма с использованием способа формирования порции из группы наблюдений по принципу скользящей замены.
Обычно этот принцип применяют в процедуре вычисления скользящего
среднего. Согласно этому принципу вновь поступившее наблюдение добавляется в конец группы, а хронологически самое раннее исключается из нее,
т.е.
группа
из
последовательности
наблюдений
заменяется
соответственно
на
( yk , xk ), ( yk 1, xk 1), , ( yt , xt )
( yk 1, xk 1), ( yk 2 , xk 2 ), , ( yt 1, xt 1) . Такой способ формирования
порции особенно удобен тогда, когда для получения прогнозных оценок используются короткие временные ряды. Число наблюдений в группе одновременно обрабатываемых может быть произвольным, но, как правило, его
стремятся выбирать, исходя из объема выборки, периода упреждения и, как
станет ясно из дальнейшего изложения, в зависимости от получаемой точности прогнозных расчетов.
Для случая, когда вектор поправок определяется по группе из n наблюдений, сформированной по вышеописанному принципу, экстремальная задача вычисления оценок вектора коэффициентов модели с использованием
экспоненциально взвешенного квадратичного критерия может быть записана
следующим образом:
bˆ t ( , n) Arg min
t n
n
j 0
k 1
t n j [ y j k x j k bt ( , n)]2 . (5.55)
93
Как и в базовой задаче, здесь минимизируется экспоненциально взвешенная сумма квадратов отклонений, но в отличие от базовой, одно и то же
значение весового коэффициента одновременно приписывается n различным
отклонениям. Фактически взвешивается не отдельно каждое наблюдение, а
сразу вся группа одновременно обрабатываемых наблюдений. Правда, если
вспомнить принцип формирования такой группы, то станет ясно, что не все
наблюдения одной и той же группы должны иметь равные весовые коэффициенты.
Изменение размера группы (величины n ) приводит к соответствующему
перераспределению весовых коэффициентов между отдельными наблюдениями. А это значит, что коэффициенты регрессионной модели зависят еще от
одного параметра, принимающего значения натурального ряда n 1, 2, .
Чтобы подчеркнуть это обстоятельство, в записи коэффициента bt ( , n)
присутствует параметр n , который также как и параметр можно настраивать
Дифференцирование функционала задачи (5.55) по bt ( , n) приводит
для получения оценок bˆ t ( , n) к следующей системе уравнений:
t n
j 0
t n j
n
t n
xj k bt ( , n)
k 1
t n j
j 0
n
xj k y j k .
(5.56)
k 1
Если использовать весовую функцию (5.56), матрица весов которой, например, для случая t 7 , n 3 , имеет вид
4
0
0
3
0
0 ( 1)
2
2
0
0
( 1)
L7 0
0
0
( 2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1)
0
0
0
2
0
0
0
0
0
0
0
0
0
0
1
0
0
1 0
0
1
0
0
то систему (5.56) можно записать в более компактной матричной форме
(5.57)
Xt Lt Xt bt ( , n) Xt Lt y t .
Разрешая систему (5.57) относительно bt ( , n) , получаем выражение для
вычисления оценки вектора коэффициентов
bˆ t ( , n) ( Xt Lt Xt ) 1 Xt Lt y t .
(5.58)
Чтобы (5.58) превратить в рекуррентную формулу для вычисления тех
же самых оценок bˆ t ( , n) , будем считать, что после того, как была рассчи-
тана bˆ t 1( , n) , поступило n новых наблюдений, в качестве которых рассматриваются последние наблюдения, известные к моменту t . Основываясь
на этом предположении, запишем систему (5.58) в виде
bˆ t ( , n) (Xt 1Lt 1Xt 1 Xnt X nt ) 1
94
(Xt 1Lt 1Xt 1 Xnt y nt ) ,
(5.59)
где первая круглая скобка представляет собой обратную матрицу суммы двух
матриц, первая из которых есть матрица системы нормальных уравнений,
полученной для t 1 наблюдения, а вторая – для n последних; аналогично
вторая круглая скобка представляет сумму соответствующих слагаемых правой части этой системы.
Используя обозначение
Ct Xt Lt Xt
и рекуррентную формулу обращения матриц, преобразуем систему к следующему виду:
1
bˆ t ( , n) [Ct11 Ct11Xnt ( X nt Ct11Xnt I n ) 1 X nt Ct11 ]
(Xt 1Lt 1Yt 1 Xnt Ynt ) .
(5.60)
Затем, проведя почленное перемножение, можно записать выражение
1
bˆ t ( , n) bˆ t 1 ( , n) Ct11Xnt y nt
Ct11Xnt ( Xnt Ct11Xnt
1
I n ) 1 Xnt bˆ t 1 ( , n)
Ct11X nt ( X nt Ct11Xnt I n ) 1
( X nt Ct11Xnt Ynt I n Ynt I n y nt ) ,
(5.61)
в котором к последнему сомножителю прибавили и отняли одну и ту же величину I n y nt . Вынесем в последнем сомножителе y nt за скобку и после
почленного перемножения и перегруппировки запишем
1
bˆ t ( , n) bˆ t 1 ( , n) Ct11Xnt y nt
1
Ct11Xnt ( X nt Ct11Xnt I n ) 1
( X nt Ct11Xnt I n )y nt
Ct11Xnt ( X nt Ct11Xnt I n ) 1 y nt
Ct11Xnt ( X nt Ct11Xnt I n ) 1 X nt bˆ t 1 ( , n) .
(5.62)
Перемножение матриц в третьем члене позволяет осуществить взаимное
уничтожение второго и третьего члена в полученном выражении, а вынесение общего множителя из последних двух членов приводит к рекуррентной
формуле
bˆ t ( , n) bˆ t 1( , n)
Ct11Xnt (Xnt Ct11Xnt I n )1
[y nt Xnt bˆ t 1( , n)] ,
(5.63)
95
где
Ct11
1
[Ct11 Ct11Xnt ( X nt Ct11Xnt I n ) 1 X nt Ct11 ] .
(5.64)
Полученные рекуррентные формулы позволяют записать многофакторную модель с многошаговым адаптивным механизмом в следующем виде:
(5.65)
yˆ nt Xnt bˆ t 1( , n) ,
bˆ t ( , n) bˆ t 1( , n)
Ct11Xnt ( Xnt Ct11Xnt I n ) 1[y nt yˆ nt ] ,
Ct1 1 [Ct11 Ct11Xnt ( X nt Ct11Xnt I n ) 1 X nt Ct11 ] .
(5.66)
(5.67)
5.6. Выбор начальных значений и
оптимальная настройка параметров адаптации
Как уже неоднократно отмечалось, для проведения расчетов по адаптив-
ным моделям необходимо задать начальные значения bˆ 1 , b̂ 0 , C 01 и определить оптимальные в некотором смысле параметры , , , а для моделей с многошаговым алгоритмом адаптивного механизма и параметр n .
В принципе, для достаточно длинных временных рядов выбор начальных значений может быть произвольным. С течением времени влияние
начальных значений на прогнозные расчеты в результате многократного
сглаживания перестает ощущаться. Однако в экономике часто приходится
иметь дело с короткими временными рядами и, поэтому, от выбора начальных значений зависит точность окончательных результатов. Кроме того, при
задании начальных значений мы должны учитывать то обстоятельство, что в
самонастраивающейся структуре адаптивного механизма предусмотрен вариант построения адаптивной модели с постоянными коэффициентами, которые по схеме построения такого варианта полагаются равными начальным
значениям. Если же выбор начальных значений осуществлять произвольным
образом, например, положить все компоненты вектора b̂ 0 равными нулю, то,
очевидно, что модель с нулевыми коэффициентами не может представлять
по точности предсказания альтернативу модели с переменными коэффициентами. Следовательно, процедура, основанная на произвольном выборе
начальных значений, исключает из схемы построения модели важный вариант ее возможной структуры, ухудшая в конечном итоге наследственные
свойства адаптивного механизма. Поэтому, в силу приведенных здесь доводов, а также учитывая, что рассматриваемые адаптивные алгоритмы являются рекуррентными вариантами взвешенного МНК, будем для ускорения сходимости к оптимальным оценкам в качестве C01 задавать матрицу, обратную
матрице системы нормальных уравнений обычного МНК
C01 ( Xt Xt )1 .
(5.68)
96
В качестве bˆ 1 и b̂ 0 выбираются векторы коэффициентов регрессионной
модели, вычисленные с помощью МНК по данным одних и тех же временных рядов
(5.69)
bˆ 1 ( Xt 1Xt 1 ) 1 Xt 1y t 1 ,
(5.70)
bˆ 0 ( Xt Xt ) 1 Xt y t ,
bˆ 0 (bˆ10 , bˆ20 , , bˆm0 ) вектор-столбец оценок коэффициентов ре-
где
грессионной модели;
y t ( y1, y2 , , yt ) вектор-столбец значений зависимой переменной в
момент времени t ;
Xt матрица значений независимых переменных из t строк
x11 x21 xm1
x12 x22 xm 2
.
Xt
x
x
x
2t
mt
1t
Начальные значения, задаваемые в виде (6.68)–(6.70), позволяют в
структуре возможных вариантов адаптивной модели предусмотреть регрессионную модель с постоянными коэффициентами, определяемыми по МНК,
как альтернативную модели с переменными коэффициентами. Это является
убедительным аргументом в пользу такого способа определения начальных
значений. Кроме того, известно, что именно этот способ обеспечивает быструю сходимость к оптимальным оценкам МНК.
Для определения оптимальных значений , , , n проще всего
применить общеизвестный метод перебора. Применение этого метода предполагает наличие критерия, с помощью которого можно из двух наборов i ,
i , i , ni и k , k , k , nk различных значений параметров адаптации
выбрать наилучший в некотором смысле. В принципе, критерий настройки
не обязательно должен быть идентичным по своей структуре функционалу
экстремальной задачи. Учитывая это замечание, критерии можно строить таким образом, чтобы они ориентировали настройку параметров адаптации на
повышение определенных характеристик точности прогнозных расчетов.
Рассмотрим три возможных варианта:
S ( , , , n)
1
S2 ( , , , n)
t
y j k yˆ j k
,
(5.71)
j 1k 1
t
max y j k yˆ j k
j 11 k
t
S3 ( , , , n) max
j 11 k
y j k yˆ j k
y j k
,
(5.72)
,
(5.73)
97
j 1, 2, , t ; k 0, 1, , .
где yˆ j k x j k bˆ j ( , , , n) ,
Первый критерий представляет собой сумму модулей ошибок прогнозирования и используется в тех случаях, когда за счет настраиваемых параметров необходимо получить минимально допустимую в рамках данной модели
сумму прогнозных ошибок по всей обучающей последовательности наблюдений. Второй критерий – это сумма модулей максимальных ошибок прогнозирования. Причем, максимальная ошибка выбирается среди ошибок прогнозирования, рассчитанных для скользящего интервала длиной . Третий критерий аналогичен второму, но только в нем суммируются относительные
максимальные ошибки прогнозирования. Применение двух последних критериев следует рекомендовать в тех случаях, когда 1 и требуется, чтобы
уровень ошибки предсказания построенной модели был по возможности равномерно минимальным для всего периода упреждения.
Для всех трех критериев в качестве обучающей последовательности используются первые t наблюдений, а в качестве контрольной – группа из
последних наблюдений. Возможны и другие способы формирования обучающей и контрольной последовательности, например, деление всего выборочного множества наблюдений на две равных части – обучающую и контрольную.
Настройка параметров адаптивного механизма заключается в определении оптимального набора значений
экстремальной задачи
d ( , , , n ) путем решения
d Arg minS (d ) ,
d D
(5.74)
в которой в качестве целевого функционала используется любой из вышеприведенных критериев. В (6.74) D представляет собой прямое произведение множеств
(5.75)
D D1 D 2 D3 ,
где D1 {: 1} ( – достаточно малая положительная величина),
D 2 {( , ) : 0, 0, 1},
D3 {n: 1 n t} .
Для решения этой задачи методом прямого перебора на множестве значений D строится сетка
(5.76)
i1 0 i1 , i1 I1,I1 {i1 : i1 1},
i2 0 i2 , i2 I 2 ,I 2 {i2 : 0 i 2 1} ,
i3 i2 i3 , i3 I 3 ,I 3 {i3 : i2 i3 1} ,
(5.77)
(5.78)
(5.79)
ni4 n0 i4 ,i4 I 4 ,I 4 {i4 : n0 ni4 t} ,
где () – заданный шаг изменения соответствующего параметра;
0 , 0 , n0 – нижние границы параметров.
98
Для каждого узла di (i , i , i , ni ) сетки (5.76)–(5.79) по рекур1
2
3
4
рентным формулам настраиваемого адаптивного алгоритма при заданных
начальных значениях C 01 , bˆ 1 , b̂ 0 вычисляется последовательность оценок
bˆ 1(di ), bˆ 2 (di ), , bˆ t (di ) , используемых в расчетах прогнозных серий
{ yˆ1 k }, { yˆ 2 k }, , { yˆt k } , (k 1, ) по значений в каждой. Определен-
ные таким образом серии прогнозных расчетов используются далее для рас-
чета величины выбранного критерия Sp (di ) . Все полученные значения критерия (их число определяется количеством узлов сетки) сравниваются между
собой, что позволяет среди узлов di , i I ( I – множество порядковых номеров, присвоенных узлам сетки) определить такой
d , для которого
S (d ) S (di ) для всех i I . Так определенный вектор параметров
d ( , , , n ) считается оптимальным. Его точность определяется за-
даваемым при построении сетки шагом изменения настраиваемых параметров.
6. ПРОГНОЗИРОВАНИЕ СЕЗОННЫХ КОЛЕБАНИЙ
6.1. Моделирование периодических колебаний
Пусть значения временного ряда y1 , y2 ,, yn колеблются около среднего значения y . Изобразим траекторию этого ряда в виде графика, представленного на рис. 8.1. Данная траектория вряд ли может являться реализацией реального процесса, но рисунок хорошо иллюстрирует вводимые ниже
определения.
Периодом называется интервал времени, необходимый для того, чтобы
значения временного ряда начали повторяться. Его обычно обозначают Р.
Временной ряд, траектория которого изображена на рис. 6.1, имеет период
Р=10.
Период измеряется числом единиц времени за цикл. Если временной ряд
имеет период Р, то и 2Р, и 3Р, и т.д. также являются его периодом. В общем
случае ряд считается периодическим, если выполняется равенство
yt yt kp , где k 1, 2,
Частотой называется величина, обратная периоду. Ее обозначают f и
она равна 1 / p . Частота указывает число повторений цикла в единицу времени. В рассматриваемом случае f 1 / 10 . Очевидно, что терминами «период»
и «частота» можно пользоваться как взаимозаменяемыми.
99
y
P
A
y
0
2
7
12
Рис. 6.1. График периодической функции
В частном случае временной ряд из констант yt c ( t 1, 2, ) можно
считать периодическим с частотой f 0 .
Амплитудой периодического ряда называется отклонение от среднего
значения временного ряда до пика или впадины. Амплитуду принято обозначать через A .
Фазой называется расстояние между началом отсчета времени и ближайшим пиковым значением и обозначается .
Периодически временные ряды могут флуктуировать возле возрастающего или убывающего среднего.
В экономике также встречаются временные ряды с возрастающей или
убывающей амплитудой.
Если временной ряд не имеет тренда среднего значения и дисперсия постоянна (т.е. среднее и дисперсия не зависят от времени), то такие временные
ряды называют стационарными.
Если при анализе временного ряда возникает ситуация, когда тренд
нужно исключить, то это легко сделать, построив регрессию yˆ t b0 b1t по
МНК и перейдя к остаткам yt yˆ t . Альтернативный подход, позволяющий
исключить тренд, предусматривает переход к разности yt yt yt 1 . В
общем случае стационарный временной ряд можно задать, используя четыре
выше введенных параметра
(6.1)
yt y A cos 2 f t .
100
Такая форма представления временного ряда называется гармоническим
представлением.
Для временного ряда, траектория которого изображена на рис. 6.1, если
t , то yt y A , так как cos 0 1.
Периодические функции удобно выражать через угловую частоту ,
задаваемую радианами в единицу времени
2f , 0 2 .
Если использовать угловую частоту, то модель временного ряда можно записать в виде
(6.2)
yt y A cos t ,
где 2f является фазой.
Последнее уравнение часто записывают через тригонометрические функции в виде
(6.3)
yt y cos t sin t ,
где A cos , A sin .
Эта запись получена с использованием тригонометрического тождества
(6.4)
cosx y cos x cos y sin x sin y .
Обычно временной ряд представляет собой сумму многих периодических рядов. Согласно одной из самых распространенных моделей стационарный временной ряд представляет собой бесконечную сумму периодических
рядов
yt y A cosi ti i ,
0 2
i 1
(7.5)
или
yt y i cos i t i sin i t .
i 1
i 1
(7.6)
Теоретически можно показать, что любой стационарный временной ряд
может быть с любой точностью аппроксимирован бесконечным рядом синусоид и косинусоид. Такое представление называют рядом Фурье. Разработан
мощный математический аппарат исследования этих рядов. Однако временные ряды в экономике слишком коротки, чтобы можно было использовать
этот аппарат. Поэтому рассматриваются другие модели.
6.2. Аддитивная и мультипликативная модели
временного ряда
Построение аддитивной и мультипликативной моделей (6.1), (6.2) сводится к расчету значений трендовой ( u ), сезонной ( s ), случайной ( ) компонент для каждого уровня ряда и предполагает выполнение следующих шагов:
1. Выравнивание исходного ряда методом скользящей средней.
2. Расчет значений сезонной компоненты s .
101
3. Устранение сезонной компоненты из исходных уровней ряда и получение выравненных данных ( u ) в аддитивной или ( u ) в мультипликативной модели.
4. Аналитическое выравнивание уровней ( u ) или ( u ) и расчет
значений u с использованием полученного уравнение тренда.
5. Расчет полученных по модели значений ( u s ) или ( u s ).
6. Расчет абсолютных и/или относительных ошибок.
6.3. Моделирование сезонных колебаний
с помощью фиктивных переменных
В качестве модели сезонных колебаний можно рассматривать уравнением множественной регрессии, факторами которого являются фиктивные переменные. Чтобы избежать проблем, связанных с обращением матрицы системы нормальных уравнений при расчете коэффициентов модели, число
фиктивных переменных такой модели должно быть на единицу меньше числа периодов внутри одного цикла колебаний. Например, если сезонность связана с квартальными изменениями, то в модель включаются три фиктивные
переменные.
В простейшем случае регрессионная модель временного ряда с циклическими колебаниями с периодичностью k может быть записана следующим
образом:
(6.7)
yt b0 b1t c1x1 c2 x2 ck 1xk 1 t ,
где
1 для j nk , n 0, 1, 2,
.
xj
0
для
всех
остальных
случаев
Например, при моделировании сезонных колебаний на основе поквартальных данных за несколько лет модель будет иметь вид
(6.8)
yt b0 b1t c1x1 c2 x2 c3 x3 t ,
где
1 для первого квартала
;
x1
0
для
всех
остальных
1 для второго квартала
;
x2
0
для
всех
остальных
1 для третьего квартала
.
x3
0
для
всех
остальных
Рассматриваемая модель для каждого квартала может быть записана
следующим образом:
(6.9)
yt b0 b1t c1 t ,
(6.10)
yt b0 b1t c2 t ,
(6.11)
yt b0 b1t c3 t ,
102
yt b0 b1t t .
(6.12)
Фиктивные модели в данной модели играют роль аддитивной сезонной
компоненты и, по своей сути, регрессионная модель с фиктивными переменными при моделировании колебаний представляет собой разновидность аддитивной модели временного ряда.
6.4. Адаптивные модели сезонных явлений
Несмотря на гибкость, с которой адаптивные модели временных рядов
отражают изменения в характере динамики прогнозируемых показателей,
однако возможности их применения ограничены. Прежде всего, это касается
процессов, характеризующихся периодически повторяющимися сезонными
эффектами. Для прогнозирования таких процессов разработан специальный
класс моделей, отличительной особенностью которых является наличие в их
структуре коэффициентов сезонности. В зависимости от способа включения
этого коэффициента различают два типа этих моделей.
К первому типу относятся модели с мультипликативным коэффициентом сезонности
xt а1t ft t ,
(6. 13)
где а1t – изменяющийся во времени коэффициент, динамика которого характеризует тенденцию развития процесса;
f t , f t 1, , f t l 1– коэффициенты сезонности;
l – количество фаз в полном сезонном цикле (при месячных наблюдениях l 12 , при квартальных – l 4 ).
Ко второму типу относятся модели с аддитивным коэффициентом сезонности
(6.14)
xt a1t gt ,
где gt , gt 1, , gt l 1 – адаптивные коэффициенты сезонности.
Фактически модели этих типов представляют собой определенного рода
комбинацию адаптивного полинома нулевой степени и соответствующего
коэффициента сезонности. Если моделируемый процесс имеет тенденцию
линейного роста, то в моделях (6.13), (6.14) член, соответствующий полиному нулевого порядка, заменяется полиномом первого порядка, и тогда модели записываются в следующем виде:
(6.15)
xt a1t a2t ft t ,
(6.16)
xt a1t a2t gt .
Расчет текущих оценок коэффициентов всех этих моделей осуществляется с использованием принципа экспоненциального сглаживания. Так,
например, расчет прогнозного значения xˆt t с помощью мультипликативной модели осуществляется по рекуррентной схеме
aˆ1t 1
xt
1 1 aˆ1t 1 ,
fˆt 1
0 1 1 ,
(6.17)
103
x
fˆt l 1 2 t 1 2 fˆt 1 ,
aˆ1t
.
xˆ (t ) aˆ fˆ
0 2 1,
(6.18)
(6.19)
Величина aˆ1t определяется как взвешенная сумма текущего значения
1
1t t l 1
xt
, полученного путем исключения сезонных колебаний из фактических
fˆ
t l
данных xt и предшествующей оценки aˆ1t 1 . В этом случае в качестве коэффициента сезонности fˆt 1 берется его наиболее поздняя оценка, сделанная
для аналогичной фазы цикла. Полученная по первому уравнению величина
aˆ1t используется впоследствии для определения новой оценки коэффициента сезонности во втором уравнении.
Для сезонной модели, учитывающей тенденцию линейного роста, можно
записать аналогичную рекуррентную схему
xt
1 1 aˆ1t 1 aˆ 2t 1 ,
fˆt 1
x
fˆt l 2 t 1 2 fˆt 1,
aˆ1t
aˆ2t 3 aˆ1t aˆ1t 1 1 3 aˆ2t 1,
xˆ t aˆ aˆ fˆ
aˆ1t 1
1t
2t
0 1 1,
(6.20)
0 2 1,
(6.21)
0 3 1,
(6.22)
t l .
(6.23)
Добавление коэффициента aˆ2t 1 несколько изменило расчетные формулы предыдущей схемы, но принцип их построения остался прежним: во всех
формулах используется процедура экспоненциального сглаживания. Прогнозные значения, рассчитанные с помощью рекуррентной схемы (6.20)–
(6.23), также как и с помощью (6.17)–(6.19), представляют собой некую
функцию прошлых и текущих данных, параметров 1 , 2 , 3 и первоначальных значений a10 , a20 , f i 0 . Точность прогноза зависит от начальных
значений и параметров адаптации. Поэтому ниже специально будет рассмотрен вопрос о проблемах их оптимизации.
Существует интересное обобщение, учитывающее возможность построения сезонных моделей путем комбинирования различных типов тенденций с
коэффициентами сезонности мультипликативного и аддитивного видов. В
зависимости от характера динамики моделируемого процесса рекомендуется
выбирать одну из девяти моделей, объединенных в три группы.
Первая группа включает модели, отражающие:
1) отсутствие закономерностей роста (модель без тренда)
(6.24)
xt a1t t ;
2) тенденцию линейного роста (модель с аддитивным линейным трендом)
(6.25)
xt a1t a2t t ;
104
3) тенденцию экспоненциального роста (модель с мультипликативным
трендом)
(6.26)
xt a1t bt t .
Во второй класс входят модели, получаемые из первого путем включения в их структуру аддитивных коэффициентов сезонности. Это включение
трансформирует (6.24) – (6.26) в модели следующего вида:
(6.27)
xt a1t gt l t ,
(6.28)
xt a1t a2t gt l t ,
xt a1t bt gt l t .
(6.29)
Третий класс, в отличие от второго, в своей структуре содержит не аддитивный, а мультипликативный коэффициент сезонности
(6.30)
xt a1t f t l t ,
(6.31)
xt (a1t a2t ) ft l t ,
xt a1t f t l bt t .
(6.32)
Для каждой из этих моделей оценка параметра a1t осуществляется по
формуле
(6.33)
aˆ1t 1d1 1 1 d 2 ,
где 1 – параметр сглаживания 0 1 ;
d1 xt – для моделей первой группы;
d1 xt gˆ t 1– для моделей второй группы;
ста;
d1 xt / fˆt l – для моделей третьей группы;
d 2 aˆ1t 1 – для моделей, не отражающих рост;
d 2 aˆ1t 1 aˆ2t 1– для моделей, отражающих тенденцию линейного ро-
d 2 aˆ1t 1bˆt 1 – для моделей, отражающих тенденцию экспоненциального
роста.
В свою очередь, оценка коэффициентов линейного роста
ществляется с помощью выражения
aˆ2t 2 aˆ1t aˆ1t 1 1 2 aˆ2t 1 , 0 2 1,
а коэффициентов экспоненциального роста bt по формуле
лам
a2t
осу-
(6.34)
aˆ
(6.35)
bˆt b 1t (1 b )bˆt 1, 0 b 1.
aˆ1t 1
Оценки коэффициентов сезонности g t и f t рассчитываются по форму-
gˆ t g ( xt aˆ1t ) (1 g ) gˆ t l , 0 g 1,
x
fˆt f t 1 f fˆt 1,
0 f 1.
aˆ1t
(6.36)
(6.37)
105
Такое комбинирование позволяет строить адаптивные модели с целенаправленно выбранным набором свойств. Правильно выбранные свойства, гарантируя требуемую адекватность модели, обеспечивают тем самым повышение достоверности прогнозных расчетов. Однако автоматический выбор,
например, в процессе настройки параметров адаптации, в рассматриваемой
схеме не предусмотрен. Поэтому для выбора нужного типа модели в каждом
конкретном случае требуется проведение дополнительных исследований по
предварительному выяснению основных свойств прогнозируемых процессов
или применение специальных процедур сравнения по формальным критериям и определения в некотором смысле «лучшей» прогнозной модели.
106
ТЕСТ
№
1.
2.
3.
4.
Вопрос
Прогноз – это:
Варианты ответа
1) достоверное, основанное на логическом выводе суждение о состоянии какого-либо объекта (процесса или явления) в
будущем;
2) вероятностное суждение о состоянии
какого-либо объекта (процесса или явления) в определенный момент в будущем и
(или) альтернативных путях достижения
каких-либо результатов;
3) опережающее отражение действительности, основанное на познании законов
развития объекта (процесса или явления).
Предсказание – это:
1) достоверное, основанное на логическом выводе суждение о состоянии какого-либо объекта (процесса или явления) в
будущем;
2) вероятностное суждение о состоянии
какого-либо объекта (процесса или явления) в определенный момент в будущем и
(или) альтернативных путях достижения
каких-либо результатов;
3) опережающее отражение действительности, основанное на познании законов
развития объекта (процесса или явления).
Предвидение – это:
1) достоверное, основанное на логическом выводе суждение о состоянии какого-либо объекта (процесса или явления) в
будущем;
2) вероятностное суждение о состоянии
какого-либо объекта (процесса или явления) в определенный момент в будущем и
(или) альтернативных путях достижения
каких-либо результатов;
3) опережающее отражение действительности, основанное на познании законов
развития объекта (процесса или явления).
Период упреждения про- 1) промежуток времени от настоящего в
гноза – это:
будущее, на который разрабатывается
прогноз;
2) промежуток времени, на базе которого
строится прогнозная модель;
107
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
Нормативный прогноз реализует процесс прогнозирования:
В среднесрочных прогнозах дается оценка:
По какому признаку прогнозы подразделяются на
поисковый и нормативный?
Прогноз
называется
наивным, если используется зависимость показателя:
Сколько типов роста рассматривается при анализе
динамики экономических
показателей?
Какая функция используется при моделировании
показателей с постоянным ростом?
Какой величине равна
производная
функции,
применяемой для моделирования постоянного
роста?
Как ведет себя относительная величина прироста показателя, динамика
которого характеризуется
постоянным ростом?
3) максимально возможный промежуток
времени, на который разрабатывается
прогноз.
1) от настоящего к будущему;
2) от будущего к настоящему.
3) от прошлого к настоящему.
1) количественная;
2) качественно-количественная;
3) количественно-качественная;
4) качественная.
1) по масштабу прогнозирования;
2) по времени упреждения;
3) по функциональному признаку;
4) по характеру объекта.
1) от каких-либо факторов, исключая время;
2) только от времени;
3) от каких-либо факторов, включая время.
1) два;
2) три;
3) четыре.
1) линейная;
2) показательная;
3) степенная.
1) убывающей;
2) возрастающей;
3) постоянной.
1) убывает, имея пределом отрицательную величину;
2) убывает, имея пределом положительную величину;
3) убывает, имея пределом нулевую величину.
Какой величине равна 1) убывающей;
производная
функции, 2) возрастающей;
применяемой для увели- 3) постоянной.
чивающегося роста?
В каком случае рекомен- 1) если относительная величина прироста
дуется применять для мо- увеличивается неограниченно;
делирования показателей 2) если абсолютная величина прироста
108
15.
16.
17.
18.
19.
20.
21.
22.
с увеличивающимся ростом
показательную
функцию?
Если у функции, применяемой для моделирования
увеличивающегося
роста, есть вторая производная, то значение этой
производной:
В каком случае тип роста
считается уменьшающимся?
растет по линейному закону;
3) если относительная величина прироста
неизменна.
1) положительное;
2) отрицательное;
3) нулевое.
Какой величине равна
производная
функции,
применяемой для моделирования уменьшающегося роста?
Если у функции, применяемой для моделирования уменьшающегося роста, есть вторая производная, то значение этой
производной:
Каким основным свойством должна обладать
вторая
производная
функции,
применяемой
для моделирования показателя с изменяющимся
характером динамики?
Можно ли функции,
применяемые для моделирования показателей с
изменяющимся характеможн
ром динамики, построить
с помощью МНК?
Смена характера динамики показателя происходит
в точке, в которой:
Почему для оценки параметров кривой Гомперца
не применим МНК?
1) убывающей;
2) возрастающей;
3) постоянной.
1) приросты увеличиваются;
2) приросты уменьшаются;
3) приросты неизменны.
1) положительное;
2) отрицательное;
3) нулевое.
1) быть положительной;
2) быть отрицательной;
3) менять знак на противоположный.
1) да;
2) можно, но все;
3) нет.
1) первая производная равная нулю;
2) вторая производная равная нулю;
3) первая производная меняет знак.
1) функция не приводится к виду, линейному по независимой переменной;
2) функция не приводится к виду, линейному по параметрам;
109
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
Для обнаружения автокорреляции используется
критерий:
Какой вывод следует из
равенства коэффициента
корреляции 0?
3) функция нелинейная по оцениваемым
параметрам.
1) Стьюдента;
2) Фишера;
3) Дарбина – Уотсона.
1) между показателем и фактором нет зависимости;
2) между показателем и фактором нет линейной зависимости;
3) между показателем и фактором есть
зависимость, но нелинейная.
1) 1 r 1 ;
2) 1 r 1;
3) 0 r 1.
1) 1 r 1 ;
2) 1 r 1;
3) 0 r 1.
1) Fрасч Fтабл; 2) Fрасч Fтабл ;
Каковы возможные границы изменения коэффициента корреляции?
Каковы возможные границы изменения индекса
корреляции?
В каком случае модель
считается адекватной?
3) r 0,8 .
Как интерпретируется в 1) коэффициент эластичности;
линейной однофакторной 2) коэффициент относительного роста;
модели коэффициент ре- 3) коэффициент абсолютного роста.
грессии b1 ?
Как в показательной мо- 1) коэффициент эластичности;
дели
интерпретируется 2) коэффициент относительного роста;
коэффициент регрессии 3) коэффициент абсолютного роста.
b1 ?
Как в степенной модели 1) коэффициент эластичности;
интерпретируется коэф- 2) коэффициент относительного роста;
3) коэффициент абсолютного роста.
фициент регрессии b1 ?
Применим
ли
метод 1) нет;
наименьших
квадратов 2) да;
для расчета параметров 3) применим после ее специального принелинейных моделей?
ведения к линейному виду.
Величина коэффициента 1) зависит от масштаба измерения y и x ;
абсолютного роста:
2) зависит от масштаба измерения только
x;
3) не зависит от масштаба измерения y и
x.
Величина коэффициента 1) зависит от масштаба измерения y и x ;
эластичности:
2) зависит от масштаба измерения только
x;
110
34.
35.
36.
37.
38.
39.
40.
41.
3) не зависит от масштаба измерения y и
x.
Если множественный ко- 1) да;
эффициент
корреляции 2) нет.
равен 0, то можно ли считать правильным утверждение: между показателем и факторами нет зависимости?
Можно ли коэффициенты 1) да;
регрессии использовать 2) нет.
для ранжирования факторов по степени их влияния на моделируемый
показатель?
С помощью какого кри- 1) хи-квадрат;
терия оценивается зна- 2) F-критерия;
чимость коэффициентов 3) t-Стьюдента.
регрессии?
Ранжирование факторов 1) коэффициентов регрессии;
по степени их влияния на 2) бета-коэффициентов;
моделируемый показатель 3) стандартных ошибок коэффициентов
осуществляется с помо- регрессии;
щью:
4) t-статистик Стьюдента.
Что принимается за стан- 1) элементы первой строки ковариациондартные ошибки коэф- ной матрицы векторной оценки регрессифициентов регрессии?
онных коэффициентов;
2) диагональные элементы ковариационной матрицы векторной оценки регрессионных коэффициентов;
3) корни квадратные из диагональных
элементов ковариационной матрицы векторной оценки регрессионных коэффициентов.
Обеспечивает ли МНК 1) да;
получение оценок регрес- 2) нет.
сионных коэффициентов
с наименьшими стандартными ошибками?
В уравнении регрессии, 1) меньше нуля;
построенном для откло- 2) равен нулю;
нения от средних y y , 3) больше нуля.
x x свободный член:
Почему нельзя построить 1) модель не будет иметь содержательной
111
42.
43.
44.
45.
46.
47.
48.
регрессию на три незави- интерпретации;
симых переменных x1 , x 2 2) матрица системы нормальных уравнений будет вырожденной;
и x3 x1 2x2 ?
3) МНК-оценки окажутся смещенными.
Можно ли построить ре- 1) нельзя;
грессию на
x1 , x 2 , 2) можно;
x3 x1x2 при условии, 3) можно, если x1 и x 2 разных знаков.
что x1 1 / x2
Если число независимых 1) r 1;
переменных модели m 2) 0 r 1;
находится
с
числом 3) r 0 .
наблюдений n в соотношении m 1 n , то коэффициент корреляции r :
Если число независимых 1) все t -статистики равны нулю;
переменных m находится 2) нельзя вычислить ни одну t с числом наблюдений n в статистику;
соотношении m 1 n , 3) нельзя проверить значимость свободното какие проблемы могут го члена.
возникнуть при проверке
значимости коэффициентов регрессии:
Почему не имеет смысла 1) полная дисперсия равна нулю;
проверять адекватность 2) воспроизведенная дисперсия равна нурегрессионной модели в лю;
случае, когда m 1 n 3) остаточная дисперсия равна нулю.
( n – число наблюдений,
m – число независимых
переменных модели)?
В каком из случаев вос- 1) r 1;
2) 0 r 1;
3) r 0 .
произведенная дисперсия
может совпадать с полной
дисперсией ( r – коэффициент корреляции)?
У какой модели остаточ- 1) y b0 ; 2) y b0 b1 x ;
ная дисперсия совпадает с 3) y b b / x .
0
1
полной?
В каком случае остаточная дисперсия равна полной?
1) все коэффициенты регрессии, кроме
b0 , ненулевые;
2) все коэффициенты регрессии, кроме
b0 , нулевые;
3) все коэффициенты регрессии ненулевые.
112
49.
Если с помощью МНК 1) bˆ y ;
0
оцениваются коэффициˆ
енты модели y b0 , 2) b0 x ;
3) bˆ0 x, y .
то b̂ равно:
0
50.
51.
Если оценивается модель 1) bˆ y ;
0
y y b0 b1 x x ,
то:
Чему равна F-статистика 1) 0;
в случае, если при по- 2) 1;
строении регрессионной 3) .
модели
2) bˆ0 x ;
3) bˆ0 0 .
y b0 b1 x1 b2 x2
были получены следующие
оценки:
bˆ0 5 ,
bˆ1 0 , bˆ2 0 ?
52.
Чему не может быть рав- 1) 0;
на F-статистика в случае,
если при построении регрессионной модели
3) .
2) 1;
y b0 b1 x1 b2 x2
были получены следующие оценки: bˆ0 0 ,
bˆ1 2 , bˆ2 1/ 2 ?
53.
54.
55.
В
процедуре
риджоценивания для нахождения вектора оценок параметров используется следующая формула ( I –
единичная матрица, –
параметр):
В случае применения
ридж-оценивания какая
характеристика
оценок
коэффициентов модели
искажается?
Что лежит в основе построения гребневой регрессии?
1
1) ХX I ;
1
2) ХX I Xy ;
3) ХX) 1 I Xy .
1) эффективность;
2) состоятельность;
3) несмещенность.
1) идея нахождения бипараметрического
семейства оценок с помощью подправленной формулы МНК
1
bˆ XX I Xy ;
2) идея нахождения однопараметрическо113
56.
57.
58.
59.
60.
61.
го семейства оценок с помощью подправленной формулы МНК
1
bˆ XX (1 ) I Xy ;
3) идея нахождения однопараметрического семейства оценок с помощью подправленной формулы МНК
1
bˆ XX I Xy .
В случае применения 1) эффективность;
ридж-оценивания, какая 2) состоятельность;
характеристика
оценок 3) несмещенность.
коэффициентов модели
исправляется?
Если расширенная матри- 1) обычный МНК;
ца данных Х имеет ранг 2) обобщенный МНК;
меньше m+1, то какой ме- 3) ридж-оценивание;
тод оценивания можно 4) метод максимального правдоподобия.
применять?
Что понимается под абсо- 1) ситуация, когда определитель матрицы
лютной мультиколлине- системы нормальных уравнений ( XX)
арностью?
равен нулю;
2) ситуация, когда определитель матрицы
( XX) в точности не равен 0, но мало от
него отличается;
3) ситуация, когда определитель матрицы
( XX) 1 в точности не равен 0, но мало от
него отличается.
При нарушении какого 1) матрица независимых переменных Х
условия
необходимо имеет максимальный ранг m 1 ( m –
строить обобщенную ре- число переменных в модели);
грессионную модель?
2) математическое ожидание случайной
составляющей равно нулю;
3) ковариационная матрица случайной
составляющей диагональная с равными
на диагонали элементами.
Если оценки коэф- 1) смещенными;
фициентов обобщенной 2) несмещенными;
регрессии получить с по- 3) трудно понять, какими свойствами они
мощью МНК, то они бу- обладают.
дут:
Почему ковариационная 1) не выведена формула для ее расчета;
матрица вектора оценок 2) неизвестна матрица Ω ;
b̂ обобщенной регрессии, 3) матрица Ω известна, но не диагональполученных с помощью ная.
114
62.
МНК, не рассчитывается
при построении модели?
Можно ли ковариационную матрицу вектора
оценок b̂ обобщенной регрессии, полученных с
помощью МНК, заменить
оценкой
1) можно;
2) нельзя, потому что такая оценка является смещенной;
3) нельзя, потому что такую оценку нельзя рассчитать.
ˆ (bˆ ) ˆ 2 ( X X) 1 ?
V
63.
В обобщенном МНК
оценки
коэффициентов
регрессии получаются по
формуле:
64.
В чем состоит суть
доступного обобщенного
МНК?
65.
Основное отличие взвешенного МНК от обобщенного МНК заключается в том, что:
В каких ситуациях обобщенный МНК сводится к
взвешенному МНК с
двухуровневой
дисперсии:
66.
67.
68.
69.
Во взвешенном МНК
наибольший вес приписывается данным:
Как поступают в том случае, если дисперсия случайной
составляющей
пропорциональна одной
из независимых переменных моделей:
Как поступают в том случае, если дисперсия слу-
1) bˆ XX 1 XΩ 1y ;
2) bˆ ( XΩ 1X) 1 XΩ 1y ;
3) bˆ ( XΩ 1 X) 1 Xy .
1) сначала получают оценку матрицы Ω ,
а затем эту оценку используют вместо Ω
в расчетной формуле;
2) в расчетах используется произвольная
невырожденная матрица Ω ;
3) матрица Ω заменяется диагональной
матрицей.
1) Ω – произвольная невырожденная
матрица;
2) Ω – диагональная матрица;
3) Ω – недиагональная матрица.
1) когда данные неоднородны по дисперсии, но их можно разделить на две группы
однородных;
2) когда дисперсия случайной составляющей пропорциональна одному из двух
факторов;
3) когда дисперсия случайной составляющей зависит от двух факторов.
1) с большей дисперсией;
2) с меньшей дисперсией;
3) со средним уровнем дисперсии.
1) все данные умножить на эту независимую переменную;
2) все данные разделить на эту независимую переменную;
3) зависимую переменную разделить на
эту зависимую переменную.
1) применяют обобщенный МНК с произвольной диагональной матрицей Ω ;
115
70.
71.
72.
73.
74.
75.
76.
чайной составляющей за- 2) применяют обычный МНК, реализуевисит от нескольких неза- мый в три этапа;
висимых переменных?
3) применяют доступный обобщенный
МНК, реализуемый в три этапа.
Для чего корректируются 1) чтобы получить несмещенную оценку
стандартные ошибки ко- ковариационной матрицы коэффициентов;
эффициентов обобщенной 2) чтобы получить состоятельную оценку
регрессии?
ковариационной матрицы коэффициентов;
3) чтобы получить минимально возможные стандартные ошибки оценок коэффициентов регрессии.
Что означает гетеро- 1) неравенство дисперсий случайной соскедастичность?
ставляющей;
2) равенство дисперсий случайной составляющей;
3) зависимость между случайными составляющими.
Что
означает
го- 1) неравенство дисперсий случайной сомоскедастичность?
ставляющей;
2) равенство дисперсий случайной составляющей;
3) зависимость между случайными составляющими.
Какой тест применяется 1) тест Уайта;
для проверки предполо- 2) тест Голдфельда – Куандта;
жения: дисперсия случай- 3) тест Бреуша – Пагана.
ной составляющей зависит от нескольких независимых переменных?
Какой тест надо приме- 1) тест Уайта;
нить для проверки пред- 2) тест Голдфельда – Куандта;
положения:
дисперсия 3) тест Бреуша – Пагана.
случайной составляющей
зависит от величины одной из независимых переменных?
В основе какого теста ле- 1) теста Уайта;
жит идея о проверке зави- 2) теста Голдфельда –Куандта;
симости дисперсии от ре- 3) теста Бреуша – Пагана.
грессоров модели?
Почему нельзя оценить 4) матрица Ω вырожденная;
неизвестные
элементы 5) число элементов в Ω больше числа
ковариационной матрицы наблюдений;
Ω в обобщенной регрес- 3) оценивание элементов Ω требует не116
77.
78.
79.
80.
81.
82.
83.
сии?
Какой МНК следует применять, если случайная
составляющая имеет
двухуровневую дисперсию?
В обобщенной регрессии
ковариационная матрица
остатков Ω :
Коэффициент автокорреляции – это:
линейных методов.
1) косвенный;
2) взвешенный;
3) обычный.
1) произвольная;
2) положительно определенная;
3) отрицательно определенная.
1) коэффициент корреляции между зависимой переменной и ее запаздывающим
значением;
2) коэффициент корреляции между зависимой переменной и независимой переменной;
3) коэффициент корреляции между зависимой переменной и случайной составляющей модели.
Если остатки регрессии
02
02
1
;
2)
;
3)
.
автокоррелированы,
то 1)
1
1 2
1 2
чему равна их дисперсия?
Какому условию удовлетворяет параметр авторегрессионной зависимости
?
Если остатки регрессии
автокоррелированы,
то
чему равно их математические ожидание?
1) 1 ;
2) 1 ;
3) 0 1.
1) сумме убывающей геометрической
прогрессии со знаменателем ;
2) коэффициенту авторегрессии ;
3) нулю.
n
По какой формуле расet et 1 2
считывается статистика
1) d t 2
;
Дарбина – Уотсона?
n 2
e
t
t 1
n
et et 1
2) d t 2
2
n 2
et 1
t 2
;
117
n
et et 1
2
3) d t 2
n
.
et
t 1
84.
Если для оценивания параметра использовать 1) ̂ 1 d ;
статистику Дарбина – Уоd
3) ˆ 1 .
тсона d , то:
2) ˆ 1
d
;
2
4
85.
Модель с бесконечным 1) yt a0 b0 xt b1xt 1 b2 xt 2 ;
числом лагов имеет вид:
2)
yt a0 b0 xt b1xt 1 b2 xt 2 t ;
3) yt a0 b0 yt b1 yt 1 b2 yt 2 t .
86.
Коэффициент b0 модели 1) краткосрочным мультипликатором;
с лаговыми переменными 2) промежуточным мультипликатором;
3) долгосрочным мультипликатором.
принято называть:
87.
Сумма всех коэффициен- 1) краткосрочным мультипликатором;
тов b j модели с лаговыми 2) промежуточным мультипликатором;
переменными называется: 3) долгосрочным мультипликатором.
88.
Любая частичная сумма
коэффициентов модели с
лаговыми переменными
называется:
Какой метод основан на
предположении о том, что
степень влияния лаговой
переменной убывает по
мере возрастания лага согласно закону, описываемому
геометрической
прогрессией?
Метод Койка основан на
предположении о том, что
степень влияния лаговой
переменной убывает по
мере возрастания в:
Модель Алмон строится в
предположении, что:
89.
90.
91.
1) краткосрочным мультипликатором;
2) промежуточным мультипликатором;
3) долгосрочным мультипликатором.
1)
2)
3)
4)
метод наименьших квадратов;
метод Алмон;
метод Койка;
метод максимального правдоподобия.
1) арифметической последовательности;
2) геометрической последовательности;
3) любой последовательности.
1) значения коэффициентов b j модели
могут быть аппроксимированы полиномами соответствующей степени от вели118
92.
Уравнение, которое получено в результате преобразования Койка:
93.
Какие ряды являются стационарными?
94.
Какой процесс называется
авторегрессионным?
95.
Как записывается модель
авторегрессионного процесса первого порядка?
96.
Если для временного ряда
чины лага j ;
2) степень влияния лаговой переменной
убывает по мере возрастания лага согласно закону, описываемому арифметической прогрессией;
3) степень влияния лаговой переменной
убывает по мере возрастания лага согласно закону, описываемому геометрической
прогрессией.
1) не содержит бесконечного числа лагов
с убывающими по закону геометрической
прогрессии коэффициентами и представляет собой уравнение линейного тренда;
2) не содержит бесконечного числа лагов
с убывающими по закону геометрической
прогрессии коэффициентами и представляет собой уравнение с авторегрессионным членом;
3) содержит бесконечное число лагов с
убывающими по закону геометрической
прогрессии коэффициентами и представляет собой авторегрессионное уравнение
второго порядка.
1) ряды, у которых с течением времени
дисперсия остается неизменной;
2) ряды, у которых с течением времени
среднее и дисперсия неизменны, а ковариация зависит от временного интервала
между соответствующими наблюдениями;
3) ряды, у которых с течением времени
амплитуда остается неизменной.
1) если его текущие значения находятся в
линейной зависимости от предыдущих
значений;
2) если его текущие значения находятся в
линейной зависимости от фактора времени;
3) если его текущие значения находятся в
линейной зависимости от текущих и
предыдущих значений.
1) yt a0 a1t t ;
2) yt a0 a1 yt 1 t ;
3) yt a0 a1xt 1 t .
1) путем представления в виде разностей;
119
97.
98.
99.
не выполняются условия
стационарности, то с помощью какого преобразования его можно привести
к стационарному?
Какой временной ряд
называется
интегрированным рядом первого
порядка?
2) путем перехода к отклонениям от
среднего;
3) путем деления на среднеквадратическое отклонение.
Как обозначается интегрированный ряд первого
порядка?
Модель
скользящего
среднего – это:
1) RA(1);
2) МА(1);
3) I(1)
1) модель, в которой моделируемый
показатель задается линейной функцией
от отклонений расчетных значений от
фактических;
2) модель, в которой моделируемый
показатель задается линейной функцией
от отклонений расчетных значений от
средних;
3) модель, в которой моделируемый
показатель задается линейной функцией
от отклонений фактических значений от
средних.
1) исходные значения которого представляют собой стационарный ряд;
2) первые разности которого представляют собой стационарный ряд;
3) вторые разности которого представляют собой стационарный ряд.
100. Какая из моделей являетyt a0 a1 yt 1 a2 yt 2
ся авторегрессионной мо- 1)
a3 yt 3 b1t b2t 2 ut ;
делью скользящего средyt a0 a1 yt 1 a2 yt 2
него?
2)
3)
a3 yt 3 b1 xt 1 b2 xt 2 ut ;
yt a0 a1 yt 1 a2 yt 2
a3 yt 3 b1 t 1 b2 t 2 ut .
101. Какие модели называют 1) модели, представляющие собой коммоделями ARIMA?
бинацию авторегрессии, интегрирования
и скользящего среднего;
2) модели, представляющие собой комбинацию авторегрессии, дифференцирования и скользящего среднего;
3) модели, представляющие собой комбинацию авторегрессии, интегрирования
и среднего.
120
102. Какую модель можно построить по данным исходного временного ряда?
103. К какому классу относится модель yt yt 1 t ?
104.
105.
106.
107.
108.
1) ARIMA(1, 1, 0);
2) ARIMA(1, 0, 1);
3) ARIMA(0, 1, 1).
1) ARIMA(1, 0, 0);
2) ARIMA(0, 1, 0);
3) ARIMA(0, 0, 1).
К какому классу относит- 1) ARIMA(1, 0, 0);
ся модель yt t t 1 ? 2) ARIMA(0, 1, 0);
3) ARIMA(0, 0, 1).
Процесс описывается ав1) значения автокорреляционной
торегрессионной моделью функции экспоненциально затухают, а
порядка m , если:
значения частной автокорреляционной
функции снижаются резко до нуля, начиная с m 1 порядка;
2) значения автокорреляционной
функции снижаются резко до нуля, начиная с m 1 порядка, а значения частной
автокорреляционной функции экспоненциально затухают;
3) значения автокорреляционной
функции равны значениям частной автокорреляционной функции до порядка m
включительно.
Процесс скорее описыва- 1) значения автокорреляционной функется моделью скользяще- ции экспоненциально затухают, а значего среднего порядка m , ния частной автокорреляционной функчем авторегрессией, если: ции снижаются резко до нуля, начиная с
m 1 порядка;
2) значения автокорреляционной функции снижаются резко до нуля, начиная с
m 1 порядка, а значения частной автокорреляционной функции экспоненциально затухают;
3) значения автокорреляционной функции равны значениям частной автокорреляционной функции до порядка m включительно.
Что проверяется с помо- 1) значимость авторегрессионных коэфщью критерия, основан- фициентов;
ного на Q -статистике 2) значимость k -го значения автокорреляционной функции остатков;
Бокса – Пирса?
3) значимость k первых значений автокорреляционной функции остатков.
Что позволяет установить 1) порядок авторегрессии;
критерий Дики – Фулле- 2) степень интегрированности;
121
ра?
109. В каких случаях рекомендуется использовать расширенный критерий Дики
– Фуллера?
110. Какую модель рекомендуется выбирать в ситуации, когда адекватными
оказалось несколько моделей ARMA?
3) порядок скользящего среднего.
1) в
случае
автокоррелированности
остатков;
2) когда порядок авторегрессии выше
первого;
3) когда в модель включается тренд.
1) наиболее простую модель, содержащую наименьшее количество параметров;
2) модель с наибольшим числом включенных в нее переменных;
3) модель, в которой порядки авторегрессии и скользящего среднего совпадают.
1) ARIMA(1, 0, 0);
2) ARIMA(1, 1, 0);
3) ARIMA(1, 0, 1).
111. Если в построенной авторегрессионной модели
y b0 b1 yt 1 коэффициент b1 1 , то мы имеем
дело с процессом:
112. У истоков адаптивных 1) процедура сглаживания с использоваметодов лежит:
нием линейной функции;
2) процедура экспоненциального сглаживания;
3) процедура сглаживания, в которой используется взвешенная скользящая средняя по трем точкам.
113. Для построения адаптив- 1) обычный МНК;
ных моделей использует- 2) обобщенный МНК;
ся:
3) рекуррентный МНК.
114. Как
осуществляется 1) по формуле Брауна;
настройка
параметра 2) методом проб и ошибок;
адаптации ?
3) оптимизационными методами.
115. Для
оптимальной 1) вся выборочная совокупность;
настройки
параметра 2) выборочная совокупность делится на
адаптации использует- две части: обучающуюся и контрольную;
ся:
3) только последние наблюдения.
116. Настройка
параметра 1) всей выборочной совокупности;
адаптации осуществ- 2) обучающей выборочной совокупности;
ляется на данных:
3) контрольной выборочной совокупности.
117. После
оптимальной 1) модель не пересчитывается;
настройки
параметра 2) модель пересчитывается на данных
адаптации :
обучающей выборки;
3) модель пересчитывается на данных
всех выборки.
118. Алгоритмы, в которых 1) рекуррентными;
122
для корректировки коэффициентов модели используется более одного
наблюдения, называются:
119. Периодом называется:
120. Частотой называется величина:
121. Амплитудой временного
ряда называется:
122. Фазой называется расстояние:
123. Какая форма представления временного ряда
называется
гармонической?
124. Какое представление временного ряда называется
рядом Фурье?
2) адаптивными;
3) одношаговыми;
4) многошаговыми.
1) интервал времени, необходимый для
того, чтобы значения временного ряда
начали изменяться на противоположные
по знаку;
2) интервал времени, необходимый для
того, чтобы значения временного ряда
начали повторяться;
3) интервал времени, необходимый для
того, чтобы значения временного ряда
увеличились в два раза.
1) прямо пропорциональная периоду;
2) равная корню квадратному из периода;
3) обратная периоду.
1) отклонение от среднего значения временного ряда до пика или впадины;
2) отклонение от минимального значения
временного ряда до его максимального
значения;
3) отклонение от начального значения
временного ряда до его среднего значения.
1) между началом отсчета времени и ближайшим минимальным значением;
2) между началом отсчета времени и ближайшим пиковым значением;
3) между началом отсчета времени и ближайшим средним значением.
1) yt y A sin 2f t ;
2) yt y cos 2f t ;
3) yt y A cos 2f t .
1) представление в виде бесконечной суммы
периодических рядов;
2) представление в виде конечной суммы
периодических рядов;
3) представление в виде бесконечной
суммы непериодических рядов.
125. Почему модели в виде 1) в экономике нет периодических рядов;
рядов Фурье, практиче- 2) не разработан математический аппарат
ски, не используются в исследования рядов Фурье;
123
экономике?
126. Аддитивную модель рекомендуется строить, когда амплитуда сезонных
колебаний:
127. Мультипликативную модель рекомендуется строить, когда амплитуда сезонных колебаний:
128. Какие независимые переменные используются в
множественной регрессии
для моделирования сезонных колебаний?
129. Сколько
переменных,
описывающих сезонные
колебания, необходимо
включать в множественную регрессию?
130. Модель сезонных колебаний в виде множественной регрессии по своей
сути представляет:
3) экономические временные ряды слишком короткие.
1) имеет тенденцию к возрастанию или
снижению в зависимости от уровня временного ряда;
2) остается практически неизменной во
всех циклах;
3) с течением времени затухает.
1) имеет тенденцию к возрастанию или
снижению в зависимости от уровня временного ряда;
2) остается практически неизменной во
всех циклах;
3) с течением времени затухает.
1) значимые переменные;
2) фиктивные переменные;
3) запаздывающие переменные.
1) равное числу периодов внутри одного
цикла колебаний;
2) на единицу больше числа периодов
внутри одного цикла колебаний;
3) на единицу меньше числа периодов
внутри одного цикла колебаний.
1) разновидность мультипликативной модели временного ряда;
2) разновидность аддитивной модели временного ряда;
3) модель, комбинирующую аддитивное и
мультипликативное представление сезонной составляющей временного ряда.
1) мультипликативный, адаптивный;
2) мультипликативный, аддитивный;
3) мультипликативный, пропорциональный.
1) путем умножения;
2) путем деления;
3) путем вычитания.
131. Какие способы включения коэффициентов сезонности в прогнозную
модель Вы знаете?
132. Каким образом данные
при корректировке коэффициентов очищаются от
сезонности в модели с
мультипликативным коэффициентом
сезонности?
133. В адаптивных моделях 1) только коэффициенты полинома;
124
изменяются:
134.
135.
136.
137.
138.
139.
2) только коэффициенты сезонности;
3) коэффициенты полинома и коэффициенты сезонности.
Границы возможных из- 1) одинаковы;
менений
параметров 2) различны;
адаптации в сезонных мо- 3) взаимосвязаны.
делях:
Если моделируемый про- 1) полиномом первого порядка;
цесс имеет тенденцию ли- 2) полиномом второго порядка;
нейного роста, то в сезон- 3) полиномом произвольного порядка.
ной модели полином нулевого порядка заменяется:
Как учитывается адди- 1) путем умножения полинома на коэфтивный коэффициент се- фициент сезонности;
зонности в адаптивных 2) путем деления полинома на коэффицимоделях с тенденцией ли- ент сезонности;
нейного роста?
3) путем прибавления полинома к коэффициенту сезонности.
Как учитывается мульти- 1) путем умножения полинома на коэфпликативный коэффици- фициент сезонности;
ент сезонности в адаптив- 2) путем деления полинома на коэффициных моделях с тенденци- ент сезонности;
ей линейного роста?
3) путем прибавления полинома к коэффициенту сезонности.
Обобщение адаптивной 1) повышении степени полинома, испольмодели сезонных явлений зуемого в модели;
основано на:
2) комбинировании различных трендов и
способов учета эффектов сезонности;
3) изменении принципа адаптивного
сглаживания.
Какие тенденции роста 1) тенденции линейного роста;
могут
учитываться
в 2) тенденции экспоненциального роста;
обобщенной модели се- 3) тенденции линейного и экспоненцизонных явлений?
ального роста.
125