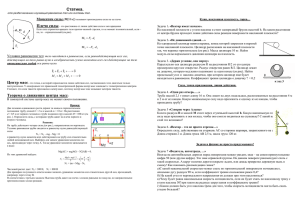
Условия равновесия произвольной плоской системы сил. Случай параллельных сил Для равновесия любой плоской системы сил необходимо и достаточно, чтобы одновременно выполнялись условия R = 0, M0 = 0. (1.8) Из этих равенств вытекают следующие три формы условий равновесия для произвольной плоской системы сил. Первая форма условий равновесия заключается в том, что Σ = Σ = ΣFx 0, Fy 0, M 0 (Fn)= 0. (1.9) т.е. для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координат осей и сумма их моментов относительно любого центра, лежащего в плоскости действия были равны нулю. Вторая форма условий равновесия выглядит так: ΣmA (Fn ) = 0, ΣmB (Fn ) = 0, ΣFx = 0, (1.10) т.е. для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительно каких-либо двух центров А и В и сумма их проекций на ось Ох, не перпендикулярную к прямой АВ, были равны нулю. Третья форма условий равновесия выражается так: ΣmA (Fn ) = 0, ΣmB (Fn ) = 0, ΣmC (Fn ) = 0, (1.11) т.е. для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительно любых трех центров А, В,С, не лежащих на одной прямой, были равны нулю. Для равновесия плоской системы параллельных сил необходимо и достаточно выполнение следующих условий: ∑Fny = 0, ∑mO(Fn) = 0, ∑m FA( n) = 0, ∑m FB( n) = 0. При этом точки А и В не должны лежать на прямой, параллельной силам. Решение задач. Приступая к решению задач, прежде всего, надо: 1) установить, равновесие какого именно тела следует рассмотреть в даннойзадаче; 2) выделить это тело и, рассматривая его как свободное, приложить к нему все действующие на тело силы и реакции отброшенных связей; 3) составить условия равновесия, применяя ту из форм этих условий, которая приводит к более простому решению. Для получения более простых уравнений следует: 1) составляя уравнения проекций, проводить координатную ось перпендикулярно какой-нибудь неизвестной силе; 2) составляя уравнения моментов, брать центр моментов в точке, где пересекается больше неизвестных сил. Решение многих задач статики сводится к определению реакций опор, с помощью которых закрепляются балки, рамы, мостовые фермы и т.д. В технике чаще всего встречаются следующие три типа опорных закреплений. 1. Шарнирно-подвижная опора (рис. 1.24). Эта опора дает только одну опорную реакцию – RА, которая направлена по общей нормали к поверхности опирания. 2. Шарнирно-неподвижная опора (рис. 1.25). Реакция NA такой опоры направлена произвольно в плоскости. Для удобства решения задач ее раскладывают на две составляющие – RA и HA: 2 2 N A = RA + H A . RA RA HA А HA MA Рис. 1.26. Жесткая заделка Рис. 1.24. ШарнирноШарнирноподвижная опора Рис. 1.25. неподвижная опора 3. Жесткая заделка (рис 1.26). Возникает реакция NA, направленная произвольно в плоскости и момент MA. Реакцию NA раскладывают на две составляющие – RA и HA. Тема 5. Система пар и сил, произвольно расположенных в пространстве Момент силы относительно центра как вектор В ряде случаев сила может обладать вращательной способностью. Количественной мерой вращательной способности силы является ее момент. Изображение момента вектором. Момент силы относительно центра О характеризуется тремя параметрами: модулем момента; плоскостью поворота ОАВ; направлением поворота этой плоскости. Если все силы лежат в одной плоскости, то направлением поворота указывается знаком. z B MO A O h y x Рис. 1.27. Схема к определению вектора момента Если же силы расположены как угодно в пространстве, то нужно задаваться плоскостью и направлением поворота. Поэтому в общем случае момент mO (F) силы F относительно центра О изображается приложенным в центре О вектором MO , равным по модулю произведению F h⋅ и расположенный перпендикулярно плоскости ОАВ. Направлять вектор будем в ту сторону, откуда поворот, совершаемый силой, виден происходящим против часовой стрелки (рис. 1.27). Выражение момента силы с помощью векторного произведения. По определению векторное произведение ОА×F векторов ОА и F равно OA× F = 2плΔOAB = MO. Отсюда OA× F = MO , или MO = r × F , где вектор r =OA называется радиус- вектором точки A относительно точки O . Следовательно, момент силы F относительно центра O равен векторному произведению радиус-вектора r =OA на саму силу F . Момент силы относительно оси На твердое тело действует сила F , приложенная в точке A (рис. 1.28). Необходимо определить момент этой силы относительно оси z. Проведем через точку A плоскость xy , перпендикулярную оси z, и разложенную силу F на составляющие – Fz , параллельную оси z и Fxy , перпендикулярную оси z. z F h Fz Fxy xy Рис. 1.28. Схема к определению момента силы Сила Fz направленная параллельно оси z не может повернуть тело вокруг оси z, т.е. вращать тело вокруг оси z будет только сила Fxy : m Fz( ) = m Fz( xy), m Fz( ) = ±Fxy ⋅h. Моментом силы относительно оси называется скалярная величина, равная моменту проекции этой силы на плоскость, перпендикулярную оси, который взят относительно точки пересечения оси с плоскостью. Правило знаков. Если при взгляде с положительного конца оси сила стремится повернуть тело против хода часовой стрелки, то момент положительный, если по ходу часовой стрелки, то момент отрицательный. При вычислении моментов нужно помнить следующие частные случаи: 1. Если сила параллельна оси, то ее момент равен нулю, так как Fxy = 0. 2. Если линия действия силы пересекает ось, то ее момент равен нулю, так как h = 0. Вывод. Момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости. 3. Если сила перпендикулярна к оси, то mz = 0 . Рассмотрим аналитические выражения для моментов силы относительно осей координат. Спроектируем силу F сначала на плоскость ,xy перпендикулярную оси z, а затем на оси x и y (рис. 1.29). z F A x x y y o Fy Fx Рис. 1.29. Схема к определению моментов сил относительно осей координат Fxy Из теоремы Вариньона очевидно, что mz (F) = mO (Fxy ) = mO (Fx ) + mO (Fy ), mz (F) = Fy ⋅ x − Fx ⋅ y . Аналогично можно записать выражения моментов относительно других осей: mx (F) = Fz ⋅ x − Fy ⋅ y , my (F) = Fx ⋅ x − Fz ⋅ y , mz (F) = Fy ⋅ x − Fx ⋅ y . Условия равновесия произвольной пространственной системы сил. Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и суммы их моментов относительно осей были равны нулю: ΣFnx = 0, ΣFny = 0, ΣFnz = 0, ∑m Fx( n) = 0, ∑m Fy( n) = 0, ∑m Fz( n) = 0. Для случая параллельных сил остаются три условия равновесия, т.к остальные три обращаются в тождество 0 = 0: ∑Fnz = 0, ∑m Fx( n) = 0, ∑m Fy( n) = 0.