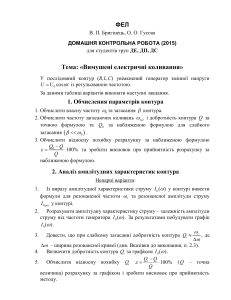
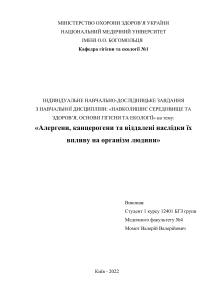
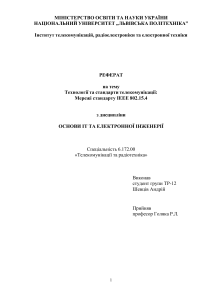
Завдання: Розрахунок характеристик мікросенсора дихломенату на поверхневоакустичних хвилях (SAW gas sensor). 1. Аналіз фізичних процесів. Мікросенсор працює на поверхнево-акустичних хвилях (ПАВ). Поверхнево-акустичні хвилі - це пружні хвилі, що поширюються вздовж поверхні твердого тіла, або вздовж границі поділу двох середовищ. ПАВ представлені в багатьох видах електротехніки; фільтри сигналів, резонатори, генератори, сенсорні системи. ПАВ зазвичай використовують електроди на п'єзоелектричному матеріалі для перетворення електричного сигналу та повернення його. Для акустоелектронних пристроїв найбільиі підходящим є п'єзоелектричні кристали з сильно вираженою анізотропією тензорів пружності жорсткості та пружності податливості (ніобат літія, LlNb03). В даній моделі досліджується резонансні частоти датчика газу. Датчик складається з зустрічноштирьового перетворювача, витравленого на п'єзоелектричній підкладці LINbO3 і покритий тонкою плівкою polyisobutylene. 2. Геометричний простір моделі. Рис.1 – Загальний вигляд сенсору Оскільки геометричний простір всього сенсору періодичний, то доцільно виділити одну комірку для розробки 2D моделі. Геометрична модель сенсору (2D) складається з прямокутників. Для їх створення в 2-х мірній моделі потрібно: повторно використовуючи Draw>Specify Objccts> Rectangle, Та натиснути OK для створення кожного прямокутника. Рисунок 2 - Скрін-шот вигляд таблиці задания геометричних параметрів моделі ( в мм). Для задания необхідного масштабу моделі потрібно: Draw>Modefy>Scale. У відображеному діалоговому вікні ввести Іе-б для обох масштабних факторів та натиснути ОК. Клацнути Zoom Extents на головній панелі, для збільшення геометрії. Рисунок 3 - Вигляд елементу структури сенсора газу. 3. Математична модель Щоб визначити модель, потрібно застосувати структурну та електричну граничні умови. Можна припустити, що поверхнева хвиля згасає протягом двох-трьох довжин хвиль від поверхні, нижня межа фіксується. Це забезпечує нульове структурне переміщення, але робить це не сприятним будь-яким істотним відображенням від нижньої межі. Електроди мають набагато вищу електропровідність порівняно з РІВ і LІNb03. Можна просто використовувати відповідні граничні умови на всіх зовнішніх межах кожного електрода. Границі лівого краю встановлюються на електричну землю, а ті, що знаходяться у правому куті, призначаються для плаваючого потенціалу з нульовим поверхневим зарядом накопичення. Коли датчик знаходиться під дією атмосферного тиску 100 ррт DCM часткова щільність" DCM у плівці РІВ може бути розрахована за формулою 𝑃𝐷𝐶𝑀.𝑃𝐼𝐵 = 𝐾𝑀𝑐 Де, це коефіцієнт розподілу повітря / РІВ для DCM, М - його малярна маса і т. Д. с = (сор)/(ДГ) - концентрація в повітрі. Концентрація DCM, в молі / мЗ, обчислюється за допомогою Газового закону. Тут сО - концентрація у частинах на мільйон, р - тиск, Т - температура, a R - газова константа( R= 8.3144598(48) Дж/(моль»К)}. Будь-якими ефектами адсорбції DCM на матеріалі, крім щільності, нехтують. 4-Задання матеріалів Кристал(LINbO3), що використовується в датчику розрізаний по YZ осям та має наступні наступні властивості. Матриця еластичностІ(ЗЕ): Пьєзоелектричні модулі (d): Відносна проникність(к'): Співвідношення Пуасона вважаємо рівним µ = 0.48 Модуль Юнга встановлений (ε) до 10 ГПа Адсорбція газу DCM являє собою невелике збільшення загальної густини РІВ ρ= 𝜌PIB + switch • 𝜌DCM.PIB У цій моделі використовується параметр, ііеремикач, значення якого може бути 0 або 1 . Це дозволяє розв'язати модель двох випадків; один раз безефекту адсорбованого газу і один раз присутній ефект адсорбованого DCM газу в РІВ. Більшість матеріальних властивостей та чинників, що впливають на них, були параметризован! як показано у Таблиці 2. Це легко дозволяє адаптувати модель до інших матеріалів та властивостей. Таблиця 2 — Властивості матеріалів. 5.Оцінка робочих частот сенсору Використання граничних умив випливає з того що частота роботи сенсору залежить від довжини хвилі, та залежить від геометрії приладу. Використовуючи це зі швидкістю хвилі Релея для даного п'єзоелектричного матеріалу підкладки, можемо знайти оцінку резонансної частоти сенсору. Інформація може бути використана у власному частотному розв'язувачі, їдо допомагає йому з'ясувати частоту резонансу, близьку до цього розрахункового числа. У цій моделі мк використовуємо YZ-розрізаний LiNb03. Хвиля-Релея має швидкість (vR) яка становить близько 3488 м / с. Це дає оцінку найнижчої частоти ПАР (fO), що рівна 872 МГц. Виявлення датчиком до 100 ррт концентрації DCM у повітрі призводить до резонансу, зсув частоти приблизно на 200 Гц вниз. Це обчислюється шляхом оцінки резонансної частоти до і після додавання адсорбованого ДХМ. Слід зауважити, що обчислювальна сітка однакова в обох цих рішеннях. Це відносна похибка частотного зсуву аналогічна відношенню частоти резонансу. Таким чином, зміна точно оцінюється, незважаючи на те, що кілька величин менше, ніж абсолютна похибка резонансної частоти. Висновки Проведено моделювання сенсора газу дихломенату на поверхнево акустичних хвилях за допомогою програмного забезпечення COMPSOL Multiphisics 3.5а. Отримано Розподіл електричного потенціалу та деформації даного сенсору з якого видно, що максимальна напруга при резонансі сенсору не перевищує 5В. Сенсор працює в діапазоні від 600 до 1000 МГц. При частоті резонансу fp=672 МГЦ. Отримано графік розподілу хвиль в сенсорі, з якого видно, що Релеєвськахвиля на якій працює сенсор затухає близько на середині висоти сенсору, що дає змогу судити про правильно обрані геометричні розміри та матеріали для сенсору.