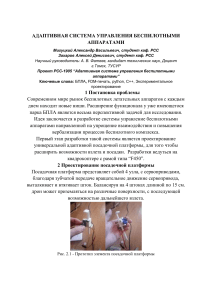
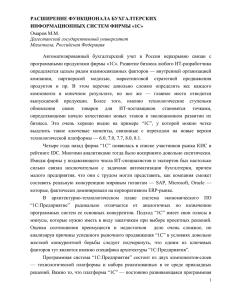
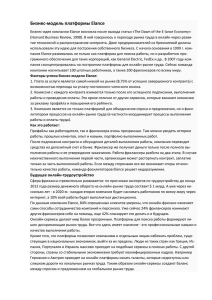
АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМИ АППАРАТАМИ Мигуцкий Александр Васильевич, студент каф. РСС Захаров Алексей Денисович, студент каф. РСС Научный руководитель: А. В. Фатеев, кандидат технических наук, Доцент г.Томск, ТУСУР Проект РСС-1905 “Адаптивная система управления беспилотными аппаратами” Ключевые слова: БПЛА, FDM-печать, python, C++, Экспериментальное проектирование 1 Постановка проблемы Современном мире рынок беспилотных летательных аппаратов с каждым днем находит новые ниши. Расширение функционала у уже имеющегося парка БПЛА является весьма перспективной задачей для исследования. Идея заключается в разработке системы управление беспилотными аппаратами направленной на упрощение взаимодействия и повышения вербализации процессов беспилотного комплекса. Первый этап разработки такой системы является проектирование универсальной адаптивной посадочной платформы, для того чтобы расширить возможности взлета и посадки. Разработки ведуться на квадрокоптере с рамой типа “F450”. 2 Проектирование посадочной платформы Посадочная платформа представляет собой 4 узла, с сервоприводами, благодаря зубчатой передаче вращательное движение сервопривода, выталкивает и втягивает шток. Балансируя на 4 штоках длинной по 15 см. дрон может приземляться на различные поверхности, с последующей возможностью дальнейшего взлета. Рис. 2.1 - Прототип элемента посадочной платформы Рис. 2.2 - Виртуальная модель платформы Рис. 2.3 - Моделирование приземления на неровную поверхность На рисунках 2.2 и 2.3 продемонстрирована работа системы адаптивной посадочной платформы. 3 Заключение Представленное, экспериментальное решение дает большую гибкость в выборе мест посадки, и повышает отказоустойчивость беспилотника в случаях когда с обычными, штатными посадочными ногами приземление на неровную поверхность делает почти невозможным повторный взлет и существенно уменьшает ресурс работы винтов дрона. ЛИТЕРАТУРА: 1. [Электронный ресурс]. – Режим доступа: https://habr.com/ru/post/414121/ (дата обращения: 19.11.2019).