А .В. Дарков, H .H . Шапошников
СТРОИТЕЛЬНАЯ
МЕХАНИКА
ИЗДАНИЕ ВОСЬМОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено Министерством
высшего и среднего
специального образования СССР
в качестве учебника
для студентов строительных специальностей
высших учебных заведений
Здесь могла быть Ваша реклама
По вопросам размещения рекламы в электронной
строительной литературе обращайтесь на
e-mail:admin@zodchii.ws или по ICQ305950110
Zoclchii.ws
Библиотека
Строительства
Б Б К 3 8 .1 1 2
Д 20
У Д К 624.04
P e цeн з eн ты : кафедра строительной механики Красноярского
инженерно-строительного института (зав. кафедрой д-р техн. наук,
проф. А.П . Абовский); д-р техн. наук, проф. Н .Н . Леонтьев
(Московскийинженерно-строительныйинститутим. В .В . Куйбышева)
Дарков А . В., Шапошников H .H .
Д 20
Строительная механика: Учеб. для строит. спец.
вузов. — 8-e изд., перераб. и доп. — М.: Высш. шк.,
1986.— 607 c.: ил.
В учебнике отражены вопросы к у рса строительной м еханики (статика
и динамика сооружений ). И зл ож ен ие материала иллюстрируется конкрет­
ными прим ерам и. В отличие от предыдущего издания (7- e — 1976 г.) р а с ­
сматриваются методы расчета с использованием Э В М , указы ваю тся особен ­
ности этих методов. В учебнике от раж ен о современное с о с т о я ние строитель­
ной механики.
П редназначается для студентов строительных специальностей вузов.
ББК 38.112
6C1
© Издательство «Высшая школа», 1976
© Издательство «Высшая школа», 1986, с изменениями
ПРЕДИСЛОВИЕ
Предлагаемый вниманию читателей учебник написан в соответ­
ствии с программой по строительной механике для студентов строи­
тельных специальностей. В связи с появлением ЭВМ строительная
механика претерпела серьезные изменения. Поэтому всю историю
развития строительной механики можно разделить на два периода:
до появления ЭВМ (классическая строительная механика) и после
появления ЭВМ. В первой части настоящего курса рассматривается
классическая строительная механика. Классические расчетные схе­
мы (балки, арки, фермы, рамы, комбинированные системы) позво­
ляют понять работу сооружений через работу простейшихрасчет­
ных схем. Это имеет огромное значение для развития инженер­
ной интуиции, без которой невозможно проектирование сооруже­
ний.
Появление ЭВМ резко расширило рамки строительной механики.
Произошел резкий поворот в сторону метода перемещений. Появился
метод конечных элементов (МКЭ), позволяющий рассчитывать стер­
жневые и нестержневые системы (пластинчатые, оболочечные,
пластинчато-стержневые, оболочечно-стержневые и т. д.) с единых
позиций. Резко расширились задачи, решаемые в разделе динамики
сооружений.
При написании курса авторы стремились, во-первых, максималь­
но использовать накопленный опыт преподавания классической
строительной механики, во-вторых, отразить современное состояние
строительной механики как стержневых, так и нестержневых кон­
струкций.
Первые семь глав курса посвящены классической строительной
механике. При этом авторы придерживались хорошо методически
проработанного традиционного изложения, исключив второстепен­
ные вопросы, связанные с упрощением арифметических выкладок
(метод упругих грузов, матрицы влияния и т. д.). Дальнейшее из­
ложение курса является нетрадиционным, поэтому остановимся на
этой части подробно.
В восьмой главе рассмотрены общие уравнения строительной
механики. Эти уравнения в существующих курсах не нашли долж­
3
ного отражения, так как их использование приводит к громоздким
арифметическим выкладкам при решении практических задач.
Однако эти уравнения позволяют более глубоко понять сущность
строительной механики. Кроме того, эти уравнения пишутся чисто
формально и их составление легко автоматизируется с использова­
нием ЭВМ. При этом метод сил и метод перемещений могут рассмат­
риваться как способы решения системы уравнений смешанного ме­
тода. Далее показана связь уравнений строительной механики с
уравнениями теории упругости. Таким образом, показано, что курс
строительной механики тесно связан с курсом теории упругости.
Общие уравнения строительной механики являются тем мостиком,
по которому совершается переход от расчета стержневых систем без
использования ЭВМ к расчету стержневых систем с использованием
ЭВМ.
В девятой главе рассмотрен расчет стержневых систем с исполь­
зованием ЭВМ. Для лучшего понимания расчета на ЭВМ первона­
чально рекомендуется провести ряд расчетов на калькуляторах.
Широкое использование калькуляторов и их доступность позволяют
лучше и быстрее понять работу программы на ЭВМ. Далее показа­
но, что наиболее удобным методом расчета стержневых систем на
ЭВМ является метод перемещений. В настоящее время все большее
распространение получают персональные ЭВМ (например, «Иск­
ра-256»). Простота программирования приведет к широкому их
использованию как в обучении студентов, так и в практике проекти­
рования. В персональных ЭВМ заложен простейший язык БЕЙСИК,
в котором имеются операции над матрицами, с использованием ко­
торых легко записать алгоритм расчета стержневых систем. Поэто­
му курс строительной механики стержневых систем заканчивается
описанием простейшего программного комплекса для персональной
ЭВМ, который составляется студентами под руководством препода­
вателя.
В курсе строительной механики студенты должны составить
свой простейший программный комплекс, который они в дальнейшем
могут адаптировать для решения тех или иных задач. В спецкурсах
или дипломном проектировании студенты должны либо использо­
вать свой комплекс, либо применять существующие универсальные
программные комплексы (например, ЛИРА, СПРИНТ и др.). При
использовании универсальных комплексов центральным вопросом
является организация входных и выходных данных, поэтому в на­
стоящем курсе рассмотрены эти вопросы с общих позиций.
В десятой главе рассмотрены вопросы расчета стержневых систем
с учетом геометрической и физической нелинейности. При изложе­
нии расчета стержневых систем с учетом геометрической нелиней­
ности рассмотрены также и вопросы устойчивости. Для решения
геометрически и физически нелинейных задач предлагается ис­
пользовать простейший линейный программный комплекс, состав­
ленный студентами по материалам предыдущей главы. При изло­
жении расчета стержневых систем с учетом физической нелиней­
ности рассмотрены и вопросы приспособляемости.
4
В одиннадцатой главе изложены основы метода конечных эле­
ментов, который является естественным распространением методов
расчета стержневых систем на системы нестержневые (континуаль­
ные). Общие уравнения стержневых систем, на примере расчета
клина, распространяются на решение плоской задачи теории упру­
гости и тем самым показывается тесная связь расчета систем стерж­
невых с системами нестержневыми. Далее рассматривается МКЭ
в форме метода перемещений. Построены матрицы жесткости для
прямоугольного и треугольного элементов. Показано, на примере
плоской задачи, что при стремлении размеров прямоугольного эле­
мента к нулю алгебраические уравнения МКЭ переходят в диффе­
ренциальные уравнения теории упругости. Рассмотрены вопросы
построения матриц жесткости для сложных элементов, суперэле­
ментный подход и особенности комплексов по расчету конструкций
с использованием МКЭ,
Следующая, двенадцатая глава посвящена основам динамики.
Первоначально рассматриваются системы с одной степенью свободы
и подробно изучаются методы решения дифференциального уравне­
ния движения. Далее рассматривается система с двумя степенями
свободы.
Особенностью изложения раздела динамики является широкое
применение численных методов и персональных ЭВМ (значительное
количество графиков в этой главе получено с использованием
графопостроителя).
При изучении курса предполагается, что читатель знаком с клас­
сическим курсом математики в объеме, соответствующем программе
вуза, поэтому последняя, тринадцатая глава содержит некоторые
дополнительные сведения из математики, используемые в строи­
тельной механике. Основное внимание уделено исследованию и ре­
шению систем линейных уравнений по методу Гаусса.
Глубокие знания в области строительной механики позволят ин­
женеру при проектировании различных конструкций резко снизить
их материалоемкость, перейти на производство новых поколений
машин, оборудования и крупных экономичных сооружений. Учеб­
ник предназначен для студентов вузов строительных специально­
стей и может быть использован инженерами-проектировщиками
в их практической деятельности. При написании книги широко
использован опыт работы на ЭВМ, поэтому учебник полезен также
для аспирантов и научных работников, работающих в области
строительной механики.
Авторы выражают свою искреннюю благодарность профессорам
H .H . Леонтьеву и H . П. Абовскому, а также коллективу кафедры
«Строительная механика» Красноярского инженерно-строительного
института за сделанные ими замечания, которые способствовали
улучшению содержания учебника, а также признательны
Л .М . Швацману за составление программ для решения примеров
и Л .М . Шапошниковой и И .А . Зубриловой за помощь при оформ­
лении рукописи.
5
Материал учебника распределен между авторами следующим
образом: Главы I—IV и VI—VII написаны А .В . Дарковым. В раз­
работке §2.8, 4.1—4.3, 4.5—4.7, 6.16, подготовленных к печати
А .В . Дарковым, принимал участие В .И . Кузнецов. Предисловие,
введение и заключение составлены А. В. Дарковым совместно с
Н . Н . Шапошниковым. Главы V III—X III, а также §2.11, 4.9
принадлежат H .H . Шапошникову.
Все замечания и пожелания будут приняты с благодарностью.
Письма просьба направлять по адресу: 101430, Москва, ГСП-4,
Неглинная ул., 29/14.
Авторы
ВВЕДЕНИЕ
Без ускорения научно-технического прогресса, без значительных
революционных изменений в интенсификации экономики, повыше­
нии социального развития страны немыслимо дальнейшее продви­
жение вперед. В связи с этим перед высшей инженерной школой
возникает большая необходимость качественного повышения
подготовки специалистов высокой квалификации. Многое в этом
отношении зависит от глубокого и серьезного изучения строитель­
ной механики — науки, формирующей инженерное мышление.
Строительной механикой, в широком смысле, называется наука
о методах расчета сооружений на прочность, жесткость и устойчи­
вость. В начальный период своего развития она не была самостоя­
тельной наукой, а сливалась с общей механикой. Самостоятельно
как наука строительная механика стала успешно развиваться лишь
в первой половине XIX в. в связи с начавшимся усиленным строи­
тельством мостов, железных дорог, плотин, судов и крупных про­
мышленных сооружений. Отсутствие методов расчета таких соору­
жений не позволяло осуществлять достаточно легкие и одновременно
надежные конструкции.
Начало науки о прочности связывают обычно с именем знамени­
того физика, математика и астронома Галилео Галилея (1564— 1642),
когда развитие судоходства поставило задачу увеличения тоннажа
судов и изменения их конструкций. Галилей, занимавшийся этим
вопросом, установил, что при увеличении размеров судов одним
только пропорциональным увеличением всех размеров брусьев
нельзя обеспечить их прочность; он доказал, что геометрически
подобные тела, находящиеся под действием собственной массы, не
являются одинаково прочными. Изучая сопротивление балок из­
гибу, Галилей сделал важные выводы, не утратившие своего значе­
ния и в настоящее время, но правильной теории изгиба он создать
не смог, так как исходил из неверного положения о наличии во всех
волокнах балки растягивающих (одинаковых по величине) напря­
жений и не знал еще физического закона, связывающего напряжения
и деформации. Позднее (в 1678 г.) этот закон в простейшей форме
был установлен Р. Гуком и сформулирован так: каково растяже­
7
ние — такова сила. Только более тщательно поставленные опыты,
проведенные значительно позднее, во второй половине X VIII в.,
когда развивающаяся промышленность поставила перед наукой ряд
новых задач, дали возможность установить наличие в изгибаемой
балке не только растягивающих, но и сжимающих напряжений и
подойти к правильному решению задачи об изгибе, поставленной
Галилеем. Развитию науки о прочности в XVIII в. в большой
степени способствовали также успехи высшей математики и ме­
ханики; особо важное значение имели работы Эйлера и Л а­
гранжа.
Наш великий соотечественник М .В . Ломоносов (1711— 1765),
один из первых занимавшийся вопросами прочности материалов,
сделал ряд замечательных открытий в самых разнообразных об­
ластях науки. Величайшей заслугой Ломоносова является то, что
он фактически подошел к открытию всеобщего закона сохранения
материи, а тем самым и закона сохранения энергии, имеющего ис­
ключительно большое значение и для строительной механики.
В частности, с помощью этого закона установлен универсальный
метод определения перемещений.
Знаменитый русский механик И .П . Кулибин (1733— 1818), из­
вестный многими изобретениями в различных областях техники,
используя законы общей механики, дал в 1776 г. проект арочного
деревянного моста пролетом 300 м через реку Неву в С.-Петербурге.
Д ля определения очертания оси арки он применил веревочный
многоугольник. С помощью модели он определил распор арки; эта
работа положила начало экспериментальному методу в мостострое­
нии (методу испытания моделей всего сооружения и его частей).
Чтобы оценить роль Кулибина в мостостроении X VIII в., следует
указать на то, что наибольший пролет деревянного моста того вре­
мени, построенного братьями Груберман в 1778 г., достигал лишь
119 м. Проект Кулибина получил высокую оценку такого выдаю­
щегося русского мостостроителя, как Д .И . Журавский, который
писал об арке кулибинского моста: «На ней печать гения; она по­
строена по системе, признаваемой новейшей наукой самою рацио­
нальною; мост поддерживает арка, изгиб ее предупреждает раскос­
ная система, которая, по неизвестности того, что делается в России,
называется американскою». В то время, когда металлические мосты
и притом малых пролетов еще только начинали строить, Кулибин
разработал проект трехарочного стального моста протяжением
260 м и сконструировал его модель.
Свое дальнейшее развитие теория и практика мирового мосто­
строения получила в трудах знаменитого русского инженера
Д .И . Журавского (1821— 1891). Он разработал теорию расчета
плоских ферм. Многие теоретические и экспериментальные его ис­
следования, обобщенные в классическом труде «О мостах раскосной
системы Гау», сохраняют свое значение и поныне. Этот выдающийся
труд, получивший высокую оценку русского академика П .Л . Чебы­
шева (1821— 1899), был удостоен Демидовской премии русской
Академии наук. В этом труде Д .И . Журавский теоретически и экс­
8
периментально установил закон распределения усилий, возникаю­
щих в различных частях раскосных ферм под действием нагрузок.
Свои теоретические выводы о распределении усилий в элементах
решетки он проверил испытанием модели фермы с помощью создан­
ного им «струнного метода». Тяжи модели заменялись струнами
одинаковой толщины; эти струны-тяжи с помощью натяжных при­
способлений настраивались на одинаковый тон. При загружении
модели натяжение струн изменялось. При проведении по струнам
скрипичным смычком струны-тяжи у опор издавали звук более вы­
сокого тона, чем струны, расположенные в средних панелях. Это
со всей очевидностью доказывало, что наибольшие усилия возни­
кают в элементах решетки, расположенных в опорных панелях.
Струнный метод не потерял своего значения и до настоящего вре­
мени. Д .И . Журавский создал научные основы теории мостострое­
ния и положил начало широким теоретическим исследованиям в этой
области. Д .И . Журавский впервые предложил при сооружении
мостов больших пролетов увеличивать высоту стоек ферм от опор
к середине пролета. Ему принадлежит также создание теории каса­
тельных напряжений при изгибе.
Значительный вклад в строительную механику сделал профессор
X.С. Головин (1844—1904). Им в 1882 г. был предложен расчет
упругой арки методами теории упругости; он одним из первых
использовал в строительной механике «принцип наименьшей
работы».
Выдающийся воспитатель инженерных кадров в России профес­
сор H.А. Белелюбский (1845—1922) был также одним из крупней­
ших русских инженеров-мостостроителей. Он спроектировал боль­
шое количество металлических мостов и в том числе величайший для
своего времени по протяженности и совершенству конструкции Сыз­
ранский мост через р. Волгу и двухъярусный мост через р. Днепр
возле Днепропетровска, разрушенный во время Великой Отече­
ственной войны. Белелюбский первым в нашей стране применил на
строительстве мостов железобетон. Он содействовал созданию рус­
ской цементной промышленности, активно боролся за распростра­
нение в России железобетонных конструкций и был одним из первых
инженеров в мире, применившим в мостостроении литое железо и
доказавшим огромное прогрессивное значение этого нового ма­
териала. Вслед за ним металлические мосты из литого железа на­
чали широко строить и за границей. H.А. Белелюбским был
издан курс строительной механики. Большое научное наследство,
оставленное им, является ценным вкладом в строительную ме­
ханику.
Важное значение для развития строительной механики имели
труды профессора Ф . С . Ясинского (1856— 1899), автора выдаю­
щихся исследований по теории расчета стержней на устойчивость и
ряда других работ по строительной механике.
Блестящие исследования по теории динамического расчета рель­
сов были опубликованы в конце прошлого и начале текущего столе­
тия академиком H.П. Петровым (1836— 1920).
9
Большую роль в развитий строительной механики сыграли
также работы талантливого инженера и педагога, профессора
В.Л . Кирпичева (1845— 1913), воспитавшего несколько поколений
русских инженеров. В.Л . Кирпичевым был открыт важный по
своему практическому значению закон упругого подобия. Этот закон
он сформулировал следующим образом: «Два тела, сделанные из
одного и того же материала, которые были подобны до приложения
к ним внешних сил, остаются подобными и после действия их, если
силы распределены подобным образом по поверхности обоих тел,
а величины соответствующих сил на единицу поверхности одинаковы
в обоих телах. При этом все внутренние силы первого тела будут рав­
ны соответственно силам второго, т. e. оба тела будут одинаково
прочны».
Теория подобия и методы физического моделирования получили
большое развитие в нашей стране.
Необычайно разносторонней была деятельность выдающегося
академика В .Г . Шухова (1853— 1939). Большое количество своих
работ он посвятил различным проблемам строительной механики
и, в частности, статике сооружений. Гиперболоидные ажурные баш­
ни, а также наливные речные и морские суда и сетчатые своды ши­
роко применяются во всех странах мира. По свидетельству акаде­
мика A.H. Крылова, Шухов в основу своей инженерной деятель­
ности положил поиски «наивыгоднейших соотношений между эле­
ментами конструкции и наивыгодиейших условий постройки и экс­
плуатации». В своей работе «Стропила», изданной в 1897 г., Шухов
писал: «...Выработанный мною аналитический расчет стропильных
ферм... дает ответ на вопросы об определении усилий, восприни­
маемых на себя различными частями фермы, об определении веса
этих частей и о назначении в проекте наивыгоднейшего геометриче­
ского расположения всех частей фермы, при котором вес употребляе­
мого на устройство фермы металла был бы наименьший».
Большой вклад в строительную механику внес профессор
Л .Д . Проскуряков (1858— 1926). По его проекту был построен
первый мост со шпренгельными фермами через реку Енисей. По
рациональности конструкции мост этот был признан одним из наи­
более удачных решений вопроса перекрытия больших пролетов.
Проект моста со шпренгельными фермами создал Проскурякову
широкую известность. В этом проекте для определения усилий в
фермах он впервые применил линии влияния. Проскуряковым на­
писан также превосходный учебник по строительной механике.
Большую роль сыграли русские ученые также и в развитии тео­
рии упругости, теории пластичности, динамики сооружений, тео­
рии устойчивости и т. д.
Однако несмотря на серьезные успехи строительной механики
в дореволюционный период, подлинный расцвет ее, как и всей оте­
чественной науки, наступил лишь после победы Великой Октябрь­
ской социалистической революции. Благодаря заботам партии и
правительства советская наука получила неограниченные возмож­
ности для своего развития. Бурный рост всего народного хозяйства
10
и строительства потребовал расширения сети высших технических
учебных заведений, научно-исследовательских институтов и про­
ектных организаций. Перед советской строительной механикой встал
целый ряд серьезных задач, успешно разрешенных нашими учены­
ми. Об этом красноречиво говорит опубликованный по инициативе
чл.-кор. АН СССР И .М . Рабиновича 1 обзор достижений строитель­
ной механики стержневых систем в СССР за 50 лет, охватывающий
только в этой области несколько тысяч наименований трудов различ­
ных советских авторов.
Замечательные работы по теории упругости и теории пластич­
ности опубликованы академиками Б .Г . Галеркиным, H.И. Myc­
хелишвили, Ю.H. Работновым, членами-корреспондентами Ака­
демии наук СССР В.3. Власовым, А .А . Ильюшиным и многими
другими. Значительный вклад в строительную механику мостов и
конструкций внесли академики Г .П . Передерий и E.О. Патон.
Много сделал для развития современных методов расчета инженер­
ных сооружений чл.-кор. Академии наук СССР H.С. Стрелецкий.
Большое количество вопросов решено советскими специалистами
в области расчета сложных статически неопределимых систем (ра­
боты профессоров И .П . Прокофьева, П .А . Велихова, А .А . Гвоз­
дева, И .М . Рабиновича, H.И. Безухова, Б.H. Жемочкина,
В .А . Киселева, С.H. Бернштейна, H.К. Снитко, В .В . Синель­
никова, И .В . Урбана и др.).
В классической строительной механике рассматривались только
стержневые системы, поэтому, исходя из нужд практики, помимо
общего курса строительной механики появились специальные кур­
сы, где рассматривались нестержневые системы, которые тесно свя­
зывались с объектом проектирования. Так появились курсы «Стро­
ительная механика корабля» (в котором рассматривался расчет
пластинок и оболочек), «Строительная механика самолета» (в ко­
тором рассматривался расчет пластинок и оболочек применительно
к самолетным конструкциям), «Строительная механика ракет» (зна­
чительная часть которого посвящена расчету осесимметричных
оболочек). В этих курсах широко использовались методы теории
упругости, которые более сложны, чем методы строительной ме­
ханики.
Большое значение для развития строительной механики имели
работы А .Ф . Смирнова, впервые широко применившего матричный
аппарат при решении сложных задач. Разработкой теории матриц
и использованием их в строительной механике в 30-е годы зани­
мался В .П . Гудков.
Дальнейшее развитие строительной механики тесно связано
с появлением электронных вычислительных машин (ЭВМ). Перво­
1
Рабинович И .М. Достижения строительной механики стержневых систем
в СССР. М., 1949; Строительная механика в СССР. 1917—1957 / Под ред. И.М. Ра­
биновича. М., 1957; Строительная механика в СССР. 1917—1957/ Под ред.
И .М . Рабиновича. М., 1969.
11
начально машина использовалась как инструмент для решения сис­
темы линейных уравнений и далее был полностью автоматизирован
весь процесс расчета. На этом этапе большую роль во внедрении
машинных методов сыграли работы отечественных ученых:
А .Ф . Смирнова, В .И . Феодосьева, И .А . Биргера, А .С. Воль­
мира, Л .А. Розина,
В . Л . Бидермана,
А .В . Александро­
ва, А .П . Филина, Д .В . Вайнберга, П .М . Сосиса, H.П. Абов­
ского, Р .А . Резникова, Б .Я . Лащеникова, А .М . Масленникова
и др.
На базе развития метода перемещений, широко используемого
в практике расчета стержневых систем на ЭВМ, и вариационно раз­
ностного метода теории упругости в строительной механике появил­
ся метод, который получил название метода конечных элементов
(МКЭ). В использовании и развитии МКЭ в СССР большую роль
сыграли работы А .Р . Ржаницына, Л .А . Розина, В .А . Постнова,
А .П . Филина, А .В . Александрова, А .С . Сахарова, В .И . Мячен­
кова, А .С. Городецкого, Л .К . Нареца и др. В настоящее время на
базе МКЭ построены универсальные программные комплексы,
позволяющие рассчитывать широкий класс конструкций. Строитель­
ная механика вышла из рамок стержневых систем и стала фунда­
ментальной наукой по расчету конструкций и сооружений любого
вида.
В связи с появлением ЭВМ существенные видоизменения про­
изошли и в динамике сооружений. Благодаря широкому использо­
ванию численных методов решаемые задачи стали более близкими
к реальным. Большое значение в развитии численных методов дина­
мических расчетов играли работы В .В . Болотина, В. И. Феодосье­
ва, А .С . Вольмира, Б .Г . Коренева, А .П . Синицына, А .П . Фи­
липпова, О .В . Лужина, В .А . Лазаряна, Г .Б . Муравского и др.
Развитие машинных комплексов расчета конструкций на статику
и динамику позволяет устанавливать напряженно-деформированное
состояние конструкций с высокой степенью точности и проектиро­
вать оптимальные конструкции, а эта задача является одной из
основных задач, поставленных партией и правительством.
Трудно переоценить практическое значение современной строи­
тельной механики. Вооруженный знанием ее законов и правил про­
ектировщик получает возможность создавать сооружения не только
надежные и прочные в эксплуатации, но также и экономичные.
В формировании этой дисциплины в прошлом и особенно в ее совре­
менном развитии огромное место занимает опыт. С каждым годом
возрастает значение экспериментальных методов, позволяющих
надежно судить о поведении под нагрузкой тех реальных материа­
лов, из которых выполняются инженерные сооружения. Старые
способы расчета инженерных сооружений, основанные на много­
численных условностях и допущениях, уступают место новым ме­
тодам, вытекающим из экспериментов, из всестороннего изучения
инженерных сооружений в условиях эксплуатации.
Строительная механика — это наука прикладная, призванная
обеспечивать строительство инженерных сооружений современными
12
методами статического и динамическогорасчета.Поэтому разработка
и доведение научных исследований до результатов, пригодных для
непосредственного использования при практических расчетах, мо­
жет обеспечить надежную связь науки с производством. Глубина и
размах научно-исследовательской работы, большое количество ре­
шенных проблем выдвинули советскую школу строительной меха­
ники на первое место в мире. Фундаментальные знания в области
этой науки будут содействовать более экономному расходованию
материальных и финансовых ресурсов страны. Качество и еще раз
качество — таков призыв нашей партии. Он является содержанием
деятельности любого из нас, в том числе и студента, изучающего
курс строительной механики.
Главa 1
КИНЕМАТИЧЕСКИЙ АНАЛИЗ СООРУЖЕНИЙ
§ 1.1. ОПОРЫ
В курсе строительной механики рассматривается расчет геомет­
рически неизменяемых систем (сооружений), т. e. таких, перемеще­
ния отдельных точек которых возможны только в результате дефор­
мации систем. Неподвижность таких систем (их геометрическая
неизменяемость) относительно земли 1 обеспечивается опорными
связями (опорами). В опорах возникают реакции, которые вместе
с заданными нагрузками представляют уравновешенную систему
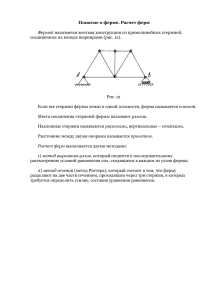
внешних сил, действующих на сооружение. Рассмотрим различные
типы опор плоских систем.
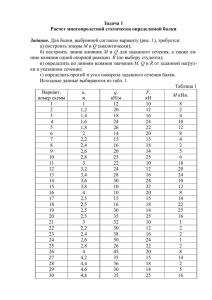
Первый тип опоры представлен на рис. 1.1. Он состоит и з двух
балансиров — верхнего 1 и нижнего 5, между которыми проложен
валик 2, играющий роль цилиндрического шарнира 2. Благодаря
Рис. 1.1
Рис. 1.2
Рис. 1.3
этому валику верхний балансир может поворачиваться относительно
нижнего. Кроме того, он может (вместе с нижним балансиром, опи­
рающимся на катки 4) перемещаться по опорной плоскости, назы­
ваемой опорной подушкой 5.
Рассматриваемая опора имеет, следовательно, две степени сво­
боды (изменяемости). Трением, развивающимся в опоре, принято
при расчете пренебрегать, а потому реакция такой опоры представ­
1
диск.
Под термином «земля» понимается геометрически неизменяемая система —
В дальнейшем при расчете плоских систем цилиндрический шарнир будем
называть шарниром.
2
14
ляет собой силу, проходящую через центр шарнира и перпендику­
лярную направлению возможного перемещения катков, т. e. верх­
ней плоскости опорной подушки. Эта сила определяется одним па­
раметром — ее величиной. Рассматриваемая опора носит название
цилиндрической подвижной или шарнирно-подвижной. Схематически
ее изображают в виде одного стержня с двумя идеальными (без
трения) шарнирами на концах1 (рис. 1.2).
Рис. 1.4
Рис. 1.5
Стержень, схематически изображающий шарнирно-подвижную
опору, условно принимается бесконечно длинным; верхняя точка
такого стержня может перемещаться лишь по прямой линии (прямая
есть окружность бесконечно большого радиуса), перпендикулярной
его оси, что полностью соответствует тем условиям, в которых на­
ходится действительная шарнирно-подвижная опора. Собственные
деформации опоры при расчетах не учитываются, т. e. опорный
стержень условно считается бесконечно жестким.
Второй тип опоры (рис. 1.3) отличается от первого тем, что ниж­
ний балансир 3 закреплен и не может перемещаться. Такая опора
обладает одной степенью свободы и носит название цилиндрической
неподвижной или шарнирно-неподвижной. Реакция ее представляет
собой силу, проходящую через
центр шарнира. Эта сила может
иметь любое направление и опре­
деляется, следовательно, двумя
параметрами — величиной и на­
правлением (или, что то же са­
мое, величинами двух состав­
ляющих ее сил, например вер­
тикальной и горизонтальной).
Схематически опора второго
,Рис. 1.6
типа изображается с помощью
двух стержней с идеальными шарнирами по концам; верхний шарнир
является общим для обоих стержней (рис. 1.4). Такая схема опре­
деляет точку приложения опорной реакции (центр верхнего шарни­
ра), оставляя ее направление неизвестным.
Направления стержней на схеме шарнирно-неподвижной опоры
могут быть выбраны вполне произвольно, так как силу (реакцию)
можно разложить на два любых направления.
«
Иногда шарнирно-подвижная опора осуществляется в виде колонны с дву­
мя шарнирами по концам; тогда она называется качающейся опорой или качаю­
щейся стойкой.
1
15
Третьим типом опоры является так называемая защемляющая
неподвижная опора, или заделка (рис. 1.5), степень свободы которой
равна нулю. Реакция такой опоры определяется тремя параметра­
ми, например: величиной и направлением силы, проходящей через
произвольную точку, и моментом относительно этой точки. Эту ре­
акцию можно представить как сочетание реактивного момента в за­
делке (опорном сечении) с реакцией шарнирно-неподвижной опоры.
Схематически опора третьего типа может быть представлена
тремя стержнями (рис. 1.6); для того чтобы заделку можно было
считать абсолютно жесткой, расстояние /0 должно быть очень малым
или брус на участке длиной /0 надо рассматривать как бесконечно
жесткий.
Отметим, что число стержней в схематическом изображении
любой опоры всегда равняется числу параметров, определяющих
полную реакцию этой опоры.
§ 1.2. УСЛОВИЯ ГЕОМЕТРИЧЕСКОЙ НЕИЗМЕНЯЕМОСТИ
СТЕРЖНЕВЫХ СИСТЕМ
Стержневыми системами называются системыу состоящие из
отдельных, обычно прямолинейных, стержней, соединенных между
собой в узлах с помощью сварки, заклепок, болтов или других скреп­
лений; одним из видов таких систем являются плоские фермы.
В большинстве случаев соединения стержней фермы в узлах
являются жесткими — не шарнирными. Точный расчет фермы с та­
кими узлами весьма сложен, так как обычно она является много
раз статически неопределимой системой. Если жесткие узлы фермы
условно заменить шарнирными, то расчет ее значительно упроща­
ется и при известных условиях может быть выполнен с помощью од­
них лишь уравнений статики. Опытные данные и теоретические
исследования показывают, что такая замена допустима, так как
при сосредоточенных нагрузках, приложенных в узлах, усилия,
возникающие в шарнирной
ферме, мало отличаются от
усилий в ферме с жесткими
узлами (в случае, когда стерж­
ни имеют достаточно боль­
шую длину). Поэтомувдальнейшем будем пользоваться
условной расчетной схемой
фермы со стержнями, шарнир­
Рис. 1.7
но соединенными в узлах.
Если заменить жесткие узлы системы, состоящей из трех стерж­
ней (изображенной на рис. 1.7, а), шарнирами, то система останется
геометрически неизменяемой (рис. 1.7, б), т. e. такой, изменение
формы которой возможно лишь в связи с деформациями ее элементов.
Если же заменить жесткие узлы шарнирами в системе, состоя­
щей из четырех стержней (изображенной на рис. 1.8, а), то полу16
чится система геометрически изменяемая (рис. 1.8, б), т. e. такая,
форма которой может меняться без деформации ее элементов.
Наипростейшей геометрически неизменяемой, сочлененной из
отдельных элементов, шарнирной системой (фермой) является сис­
тема, состоящая из трех
стержней,
соединенных
шарнирами в треугольник
(см. рис. 1.7, б).
Установим, как может
быть образована геометри­
чески неизменяемая систе­
ма, состоящая более чем
из трех стержней, соеди­
Рис. 1.8
ненных шарнирами.
Предварительно рассмотрим систему из двух стержней (рис. 1.9),
лежащих на одной прямой и соединяющих узел С с двумя неподвиж­
ными точками А и В. Если разъединить стержни АС и ВС в точке
С, то конец С стержня АС переместится по окружности m — m,
а конец С стержня ВС — по окружности n — п. Эти окружности
в точке С имеют общую касательную. Следовательно, если точка С
одного из стержней получит весьма малое перемещение по перпен­
дикуляру к А В Уто другой стержень не сможет воспрепятствовать
Рис. 1.9
Рис. 1.10
этому перемещению. Таким образом, рассматриваемая система яв­
ляется геометрически изменяемой, так как ее форма может меняться
при неизменной длине стержней, т. e. при отсутствии деформаций ее
элементов.
Систему с двумя стержнями, лежащими на одной прямой
(рис. 1.9), в дальнейшем будем называть мгновенно изменяемой,
так как она в следующее мгновение после малого смещения точки С
по перпендикуляру к прямой A B превращается в неизменяемую
систему.
Иная картина получается, если стержни АС и ВС не лежат на
одной прямой (рис, 1.10); в этом случае окружности m — m и n — n
не имеют общей касательной, а потому даже малое перемещение
узла С невозможно без деформации стержней.Таким образом, всякий новый узел, добавляемый в процессе
образования геометрически неизменяемой системы, может быть
присоединен с помощью двух стержней, оси которых не должны
лежать на одной прямой.
Следовательно, системы, подученные из шарнирного треуголь­
ника путем последовательного присоединения узлов, причем каж­
17
дого ДЕумя стержнями, не лежащими на одной прямой, геометри­
чески неизменяемы, т. e. геометрическая структура их неизменяема.
Такие системы (или фермы) называют простейшими в отличие от
сложных, которые получают обычно в результате видоизменения
простейших, в частности, с по­
мощью замены одних стержней дру­
гими, или путем наложения одной
системы на другую \
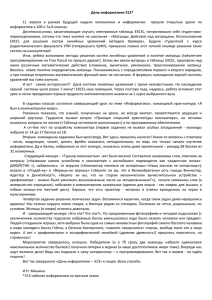
К простейшим системам отно­
сятся фермы, представленные на
рис. 1.11. Каждая из них полу­
чена последовательным присоедине­
нием шарнирных узлов указанным
выше способом к основному шар­
нирному треугольнику abc в поряд­
ке, обозначенном на чертеже циф­
рами. В качестве основных тре­
угольников abc при проверке гео­
метрической неизменяемости прос­
тейших ферм могут быть приняты
любые шарнирные соединения трех
стержней.
Ферма, состоящая только из
треугольников, геометрически не­
изменяема. Любой
шарнирный
треугольник ее может рассматри­
ваться как основной. Проверку
геометрической
неизменяемости
простейших ферм можно произво­
дить и обратным путем, т. e. по­
следовательно отбрасывая каждый
узел и два стержня, прикрепляю­
щих его к остающейся части фер­
мы. Если в результате этого полу­
чится система в виде шарнирного
треугольника, то рассматриваемая
ферма геометрически неизменяема.
Установим зависимость между
числом узлов и числом стерж­
Рис. 1.11
ней, необходимых для получения
простейшей фермы. Такая ферма,
как уже известно, образуется из основного шарнирного треуголь­
ника путем последовательного присоединения новых узлов, при
этом каждого с помощью двух стержней, не лежащих на одной
прямой.
1
О структуре плоских систем см. в кн.: РабиновичИ. М. Кинематический
метод в строительной механике. М., ИздГМосковского высшего технического
училища, 1928.
18
Обозначим: 5 — число стержней такой фермы, К — число ее
узлов. Основной треугольник имеет три узла и три стержня; каж­
дый из остальных присоединяемых узлов в количестве (К—3) при­
крепляется двумя стержнями. Поэтому полное число стержней в
простейшей геометрически неизменяемой ферме
S = 3 + 2 (^ -3 ),
или
S = 2 K -3 .
(1.1)
Если число стержней S<Z,2K—3, то это показывает, что ферма
в своем составе не имеет минимального количества стержней, не­
обходимого для образования
геометрически неизменяемой
системы. Следовательно, в
этом случае система геомет­
рически изменяема. Приме­
ром такой системы может слу­
жить четырехугольник (рис.
Рис. 1.12
1.12, я), в котором S = 4 , К —
= 4; следовательно,
S=A<z2K—3=2*4—3 = 5 .
Превращение его в неизменяемую систему может быть достигнуто
включением пятого диагонального стержня (рис. 1.12, б). Если,
далее, введем вторую диагональ — шестой стержень (рис. 1.12, в),
то с точки зрения геометрической неизменяемости этот стержень
будет уже лишним. Из этого примера видно,
что могут встречаться геометрически неизме­
няемые системы, в которых S > 2 K —3.
Заметим, что соотношение S ^ 2 K —3 явля­
ется необходимым, но еще недостаточным ус­
ловием неизменяемости фермы. Так, ферма,
изображенная на рис. 1.13, а, геометрически
изменяема, хотя имеет число стержней S', paBное 2К —3; на рис. 1.13, б изображена изме­
няемая ферма, для которой S > 2 K —3. Из­
меняемость этих ферм объясняется тем, что
правые их части представляют собой шарнир­
Рис. 1.13
ные четырехугольники.
■ Кроме того, стержневые системы, удовлетворяющие условию
S = 2 K - 3 , могут быть мгновенно изменяемыми.
Перейдем теперь к вопросу о присоединении геометрически
неизменяемой системы к земле посредством опор.
Наиболее часто сооружение (диск) опирается на две шарнирные
опоры, одна из которых неподвижная, другая подвижная
(рис. 1.14, а). Такая связь сооружения с землей обеспечивает ему
геометрическую неизменяемость. Не обязательно, чтобы два из
трех опорных стержней объединялись одним общим шарниром;19
стержни геометрически неизменяемой системы могут и не иметь
общих шарниров (рис. 1.14, б).
Если все опорные стержнирасположены так, что их направле­
ния пересекаются в одной точке 0 (рис. 1.15, а), то эта точка явля­
ется мгновенным центром, вокруг которого система может совер­
шать бесконечно малое вращательное перемещение (практически
это перемещение может быть конечным, но малым). После такого
Рис, 1.14
перемещения все опорные стержни уже не будут пересекаться в од­
ной точке и потому дальнейшие перемещения будут невозможны без
деформации стержней.
Система, прикрепленная к земле подобным образом, обладает
мгновенной подвижностью (мгновенной изменяемостью); такое рас­
положение стержней недопустимо г. Таким образом, прикрепление
системы к земле с помощью трех стержней возможно лишь в том
Рис. 1.15
случае, когда оси этих стержней не пересекаются в одной точке и не
параллельны друг другу2.
Распространяя это положение на случай взаимного соединения
двух любых геометрически неизменяемых систем (дисков), можно
сформулировать следующее правило: два диска образуют геометрически неизменяемую систему, если они связаны между собой с помощью
tnpex стержней, оси которых не пересекаются в одной точке и не
параллельны друг другу.
Далее, в § 5.4 показано, что в мгновенно изменяемой системе при действии
даже незначительной внешней нагрузки могут возникать очень большие усилия.
2 Так как направления параллельных стержней пересекаются в одной точке»
находящейся в бесконечности,
1
20
Если в точке пересечения направлений любых двух из этих
трех стержней поставить шарнир и соединить его с диском, то сис­
тема не станет геометрически изменяемой, но это даст возможность
рассматривать ее как состоящую из двух дисков / и / / , связанных
друг с другом одним общим шарниром А и стержнем В (рис. 1.15, б).
Следовательно, к диску можно геометрически неизменяемо присоеди­
нить другой диск с помощью общего
для обоих дисков шарнира и стержня,
направление которого не должно прохо­
дить через этот шарнир.
Сочленение трех дисков в одну об­
щую геометрически неизменяемую сис­
тему можно осуществить, соединив их в
треугольник с помощью трех шарниров,
Ряс. 1.16
не расположенных на одной прямой
(рис. 1.16), или с помощью шести стержней, как это показано на
рис. 1.17, так как каждый шарнир может быть заменен двумя стерж­
нями, пересекающимися в его центре.
Система, изображенная на рис. 1.18, мгновенно изменяема, так
как точки пересечения осей стержней, связывающих каждую пару
дисков, лежат на одной прямой. Она аналогична системе, показан­
ной на рис. 1.9.
Рис. 1Л7
Рис. 1.18
Итак, три диска, соединенных с помощью шести стержней так,
что между каждой парой дисков установлено по два стержня, точки
пересечения которых не лежат на одной прямой, представляют со­
бой геометрически неизменяемую систему.
На рис. 1.19, а — к приведен ряд систем, образованных указан­
ными способами.
На рис. 1.20 изображена система, представляющая собой один
из возможных вариантов многопролетной статически определимой
балки (более подробно такого рода системы рассмотрены в § 2.9).
Установим ее геометрическую неизменяемость. Для этого выделим
из балки какую-нибудь геометрически неизменяемую систему (диск),
неподвижно соединенную с землей тремя стержнями, а затем по­
стараемся убедиться в том, что каждая следующая геометрически
неизменяемая система присоединяется к диску (т. e. к земле и уже
присоединенным к ней системам) с помощью трех стержней,
21
Рассматривая стержень /, убеждаемся в том, что он неподвижно
соединен с землей тремя стержнями, не пересекающимися в одной
точке и не параллельными между собой; стержень / / , соединенный
двумя стержнями с землей и одним стержнем ab со стержнем /,
также образует неизменяемую систему; к этой системе аналогично
(с помощью стержня с^идвух опорных стержней) присоединенстержень / / / ; наконец, к этому стержню посредством шарнира e и
опорного стержня присоединен последний элемент cf. Следовательно,
вся система в целом является геометрически неизменяемой.
Рнс. 1.20
Рис. 1.21
Рассмотрим теперь пример геометрически изменяемой системы
(рис. 1.21). Диски / и I I I по отношению к диску 11 можно рас­
сматривать как опорные стержни AD и CF; тогда диск I I оказыва­
ется прикрепленным к земле тремя стержнями A D , CF и верти­
кальным стержнем B f оси которых пересекаются в точке £ . Следова­
тельно, система является мгновенно изменяемой.
22
§ i.3 . УСЛОВИЯ СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ
ГЕОМЕТРИЧЕСКИ НЕИЗМЕНЯЕМЫХ СТЕРЖНЕВЫХ СИСТЕМ
Выше было установлено, что связь сооружения с землей, схема­
тически изображаемая тремя стержнями, не пересекающимися в од­
ной точке, геометрически неизменяема. Такая связь статически
определима, так как число усилий в этих стержнях равно числу
уравнений статики (например, ^ X = 0 , ^ Y = 0 и 2 ^ ^ 0 ) * котоРЬ1е
можно составить для плоской системы сил, находящейся в равно­
весии.
Сооружение статически определимо относительно опорных за­
креплений лишь в том случае, когда число параметров, определяю­
щих реакции этих закреплений, равно трем. Этому условию удов­
летворяют, например, следующие две системы опорных закреплений:
1) комбинация шарнирно-подвижной и шарнирно-неподвижной
опор — для сооружений, опираю­
щихся в двух точках (рис. 1.22, а);
2) комбинация трех шарнирно­
подвижных опор (рис. 1.22,6) —
при наличии трех опорных точек в
сооружении; при этом направле­
ния реакций (на рисунке показаны
штриховыми линиями) всех трех
опор не должны пересекаться в од­
ной точке и не должны быть парал­
лельны друг другу.
Наличие у геометрически неиз­
меняемой системы четырех и более
Рис. 1.22
опорных стержней, среди которых
имеется три стержня с направле­
ниями осей, не пересекающимися в одной точке и не параллельными
друг другу, указывает на то, что сооружение статически неопределимо(рис. 1.23).Статическинеопределимое сооружениенельзя рас-
Рис. 1.23
Рис. 1.24
считывать с помощью одних лишь уравнений статики; для этого
требуется составить дополнительные уравнения, основанные на
изучении его деформаций.
Перейдем теперь к условиям, которым должны удовлетворять
сами статически определимые стержневые системы (фермы), т. e.
такие системы, усилия в элементах (стержнях) которых могут быть
найдены с помощью одних лишь уравнений статики.
23
При действии на шарнирную ферму сосредоточенных сил, при­
ложенных в узлах (шарнирах), в ее прямолинейных стержнях возникают одни лишь продольные (сжимающие или растягивающие)
силы. Для доказательства усло­
вия этого выделим из фермы
(рис. 1.24, а) стержень ab (рис.
1.24, б) и рассмотрим условия его
равновесия.
Если к элементу ab непосред­
ственно не приложена внешняя на­
грузка, то равновесие его возмож­
но только тогда, когда силы N,
Рис. 1.25
действующие на стержень от шар­
ниров а и 6, равны друг другу по
числовому значению величины и направлены в противоположные
стороны. Силы N проходят через центры шарниров, так как соеди­
нения стержней в узлах предполагаются выполненными с помощью
идеальных шарниров (свободных от трения). Следовательно, силы N
направлены вдоль прямой, проходящей через центры шарниров
а и by а потому вызывают в поперечных сечениях стержня ab лишь
продольные силы. Если ферма имеет' криволинейные стержни, то
в поперечных сечениях этих стержней кроме продольных сил возни­
кают изгибающие моменты, вызывающие в них дополнительные на­
пряжения. Наибольшие значения этих моментов M = N f (рис. 1.25).
Рис. 1.26
Если ферма в целом (рис. 1.26, а) под действием сил, приложен­
ных к ее узлам, находится в равновесии, то и любой из ее узлов
(рис. 1.26, б) также находится в равновесии, т. e. внешняя нагрузка,
действующая на узел, и внутренние усилия в стержнях, сходящихся
в данном узле, взаимно уравновешиваются.
На каждый узел фермы действует система сил, пересекающихся
в одной точке. Для такой системы сил статика дает два уравнения
равновесия:
^ X =0 и 2^= 0.
Если ферма имеет К узлов, то для них можно составить 2К урав­
нений равновесия, с помощью которых должны быть найдены уси­
лия во всех стержнях фермы и три неизвестные опорные реакции.
24
Любые другие уравнения равновесия для отдельных частей фе{ШЫ
(например, группы узлов) или для всей фермы в целом могут быть
получены из этих уравнений, а потому не дадут'новых условий для
определения неизвестных усилий. Следовательно, ферма будет ста­
тически определима, если число стержней ее 5 равио удвоенному
числу узлов минус 3:
S = 2 K -3 .
(1.2)
Полученная зависимость между числом стержней и числом узлов
статически определимой фермы совпадает с условием (1.1) ее гео­
метрической неизменяемости.
Следовательно, всякая простейшая ферма, т. e. ферма, образо­
ванная из стержневого шарнирного треугольника последовательным
присоединением узлов (каждого с помощью двух стержней, не лежа­
щих на одной прямой), является системой геометрически неизменяе­
мой и одновременно статически
определимой.
Если при подсчете числа
стержней S системы учесть и
опорные стержни, то условие
S = 2 K —3 примет вид
S o6ui=2K.
(1.3)
Этой формулой удобно пользо­
Рис. 1.27
ваться в тех случаях, когда cooружениехотяиявляется геометрически изменяемым(т.е.количество
S его стержней меньше, чем 2К —3), но так связано с землей, что
образует вместе с ней единую геометрически неизменяемую стати­
чески определимую систему. Пример такого сооружения дан на
рис. 1.27. Для него К —8, количество стержней в сооружении S
(без опорных) равно 12. Таким образом, оно не удовлетворяет усло­
вию (1.1): S = 2 K —3 (так как S = 1 2 , a 2К —3=2*8—3 —13) и, сле­
довательно, является геометрически изменяемым. Однако 5 общ
системы вместе с опорными стержнями, равное 16, удовлетворяет
условию (1.3), а потому эта система может быть (и в данном случае
является) геометрически неизменяемой статически определимой
системой \
Все стержни статически определимой системы являются с точки
зрения геометрической неизменяемости безусловно необходимыми,
т. e. в такой системе нет ни одной лишней связи (ни одного лишнего
стержня).
Если геометрически неизменяемая система в своем cocfaBe имеет
число стержней, превышающее минимально необходимое, то она
является статически неопределимой.
1
Методы исследования такого рода систем см. в § 4.5,
25
Статика сооружений рассматривает только геометрически не­
изменяемые системы, разделяя их на статически определимые и
статически неопределимые.
Рис. 1.28
Читателю предлагается исследовать вопрос о геометрической
неизменяемости и статической определимости систем, приведенных
на рис. 1.28, а — л.
Гла в a 2
БАЛКИ
§ 2.1. ОБЩИЕ СВЕДЕНИЯ
Из курса сопротивления материалов читателю известны способы
определения внутренних усилий, возникающих в поперечных се­
чениях однопролет.ных статически определимых балок, и построения
эпюр этих усилий от действия на балки неподвижной нагрузки. Эти
способы используются и в курсе строительной механики.
При определении значений внутренних усилий в балках будем
пользоваться сформулированными ниже правилами.
Поперечная сила Q положительна, когда на левом торце правой
части балки она направлена снизу вверх, а на правом торце лесой
части — сверху вниз.
Рис. 2.1
Изгибающий момент M положителен, когда на левом торце пра­
вой части балки он направлен по часовой стрелке, а на правом
торце левой части— против часовой стрелки.
При нагрузках, направленных не по нормали к оси балки (а под
другим углом), в поперечных сечениях ее возникают кроме попереч­
ных сил и изгибающих моментов также и продольные силы N. Про­
дольная сила положительна, когда она вызывает растяжение, и
отрицательна, когда она вызывает сжатие.
На рис. 2.1 показаны положительные направления поперечной
силы, продольной силы и изгибающего момента в поперечном сече­
нии балки. Из рисунка видно, что при положительном изгибающем
моменте верхние волокна балки испытывают сжатие (укорочение),
а нижние — растяжение (удлинение); положительная поперечная
сила вращает каждую часть балки относительно другого ее конца
по часовой стрелке.
При построении эпюр поперечных и продольных сил положи­
тельные значения ординат откладывают вверх от оси эпюры, а от­
27
рицательные — вниз; полезно указывать на отдельных участках
эпюр знаки внутренних усилий. При построении же эпюры изги­
бающих моментов положительные значения их откладывают вниз от
оси эпюры, отрицательные — вверх; в результате этого эпюры из­
гибающих моментов оказываются расположенными со стороны рас­
тянутых волокон балких.
Знак поперечной силы можно установитьспомощью эпюры изги­
бающих моментов, используя следующее правило: поперечная сила
в данном сечении положительна, если
для совмещения оси элемента с каса­
тельной к эпюре изгибающих моментов
приходится ось элемента вращать по
часовой стрелке. Вращение оси должно
происходить всегда так, чтобы угол по­
ворота не превосходил 90°.
Допустим, например, что требуется
определить поперечную силу в сечении
x элемента балки, эпюра изгибающих
моментов для которого приведена на
рис. 2.2. В этом случае для совмещения
Рис. 2.2
оси элемента с касательной к эпюре
изгибающих моментов приходится ось
элемента вращать по часовой стрелке (это вращение на чертеже по­
казано штриховой стрелкой); следовательно, в рассматриваемом
сечении поперечная сила положительна, так как для совмещения оси
элемента с касательной нужно ось элемента повернуть по часовой
стрелке (рис. 2.2).
Поперечная сила Q равна (по величине и знаку) сумме проекций
всех внешних сил, приложенных к левой части балки, на нормаль
к ее оси, проведенную в рассматриваемом поперечном сечении, или
сумме проекций (на ту же нормаль), взятой с обратным знаком, всех
внешних сил, приложенных к правой части балки 2:
Q = 2 r = - 2 ^ ;
лев
пр
(2-1)
при этом проекции внешних сил на нормаль к оси балки положи­
тельны, когда они направлены снизу вверх.
Изгибающий момент M равен (по числовой величине и знаку)
сумме моментов относительно оси z (проходящей через центр тяжести
рассматриваемого поперечного сечения балки перпендикулярно
плоскости действия внешних сил) всех внешних сил, приложенных
к левой части балки, или сумме моментов, взятой с обратным зна­
ком, всех внешних сил, приложенных к правой части балки:
M = 2 M , = -2 M * .
лев
пр
(2.2)
1 В курсах сопротивления материалов эпюры изгибающих моментов строят
обычно со стороны сжатых волокон.
2 См.: ДарковЛ. £ ., ШпироГ. С. Сопротивление материалов. iM., 1975,
28
при этом моменты внешних сил положительны, когда они действуют
по часовой стрелке.
Продольная сила N равна (по числовой величине и знаку) сум­
ме проекций всех внешних сил, приложенных к левой части балки,
на ее ось или сумме проекций (на ту же ось), взятой с обратным
знаком, всех внешних сил, приложенных к правой части балки:
tf = 2 * = - 2 * ;
лев
пр
(2.3)
при этом проекции внешних сил на ось балки положительны, когда
они действуют справа налево.
Между эпюрами M и Q и нагрузкой, действующей на балку,
существуют определенные зависимости. Эти зависимости позволяют
проверять правильность эпюр и облегчают их построение. Они
применимы не только для балок, но и для рамных систем, а потому
имеют большое значение в строительной механике.
Основная зависимость имеет вид
Q=dM/dx,
т. e. поперечная сила равна первой производной от изгибающего
момента по абсциссе сечения балки (теорема Журавского).
Аналогично между поперечной силой и интенсивностью нагрузки
существует также дифференциальная зависимость
q=dQ/dx.
Учитывая эти зависимости, можно сформулировать ряд положе­
ний:
1) участкам с восходящими (слева направо) ординатами эпюры
M (т. e. с убывающими значениями M ) соответствуют участки с от­
рицательными значениями Q, а участкам с нисходящими ординатами
эпюры M — участки с положительными значениями Q;
2) чем круче касательная к эпюре M, тем больше абсолютное
значение Q. Числовое значение поперечной силы равно «тангенсу»
угла между этой касательной и осью балки;
3) в сечениях, где поперечная сила равна нулю, изгибающий
момент максимальный или минимальный;
4) между сосредоточенными силами (если между ними отсут­
ствует распределенная нагрузка) эпюра M ограничена прямой (в об­
щем случае наклонной), а эпюра Q — прямой горизонтальной ли­
нией;
5) на участках балки с равномерно распределенной нагрузкой
эпюра M ограничена параболой второй степени, а эпюра Q — на­
клонной прямой;
6) при распределенной нагрузке эпюра M обращена выпукло­
стью в ту сторону, в которую направлена эта нагрузка;
7) точка приложения сосредоточенных сил, перпендикулярных
оси балки, соответствуют переломы в эпюре M и скачки в эпюре Q.
Когда сила направлена вниз, то и скачок в эпюре Q при перемеще­
нии слева направо должен быть вниз; когда сила направлена вверх,
29
то и скачок должен быть вверх; величина скачка равна величине
силы;
8) изменение числового значения величины изгибающего мо­
мента на каком-либо участке балки равно площади эпюры попереч­
ных сил на этом участке (при условии, что на данном участке к балке
не приложены внешние моменты);
9) изменение числового значения величины поперечной силы на
каком-либо участке балки равно площади эпюры распределенной
нагрузки q на этом учасгке.
В настоящей главе рассматриваются способы определения уси­
лий в поперечных сечениях однопролетных статически определи­
мых балок от действия на них подвижной нагрузки, а также спо­
собы определения усилий в поперечных сечениях многопролетных
статически определимых балок от действия неподвижной и подвиж­
ной нагрузок. С подвижной нагрузкой приходится встречаться при
расчетах мостов, кранов и других инженерных сооружений. Приме­
рами такой нагрузки являются поезд, перемещающийся по железно­
дорожному мосту, кран, движущийся по подкрановой балке и др.
Усилия в том или ином элементе сооружения (а также его дефор­
мации) зависят от положения подвижной нагрузки. Для определе­
ния расчетных величин усилий необходимо из всех возможных
положений нагрузки выбрать такое, при котором рассчитываемый
элемент будет находиться в наиболее неблагоприятных условиях.
Например, при подборе размеров поперечного сечения какого-либо
элемента фермы нужно заданную подвижуную нагрузку располо­
жить таким образом, чтобы в рассматриваемом элементе получить
максимальное усилие. Такое положение нагрузки называется не­
выгоднейшим или опасным. Каждому элементу фермы, каждому по­
перечному сечению балки и т. п. соответствует свое опасное поло­
жение подвижной нагрузки.
Это относится не только к внутренним усилиям в элементах кон­
струкций, но также и к опорным реакциям, прогибам и т. п.
Расчет сооружения на подвижную нагрузку в значительной сте­
пени облегчается возможностью применения принципа независи­
мости действия сил, сущность которого заключается в том, что внут­
ренние усилия, напряжения и деформации, вызванные воздействием
на сооружение различных нагрузок, можно суммировать.
Если, например, на сооружение одновременно действуют две
группы сил, то возникающее при этом усилие в любом элементе
сооружения будет равно сумме усилий, возникающих в нем при дей­
ствии каждой группы сил в отдельности х.
Исследование действия на сооружение подвижной нагрузки
начнем с рассмотрения наиболее простого случая, когда по coopyПринцип независимости действия сил распространяется иа случаи действия
на сооружение не только сосредоточенных сил, но также моментов, температуры,
распределенных нагрузок и др.; его часто называют принципом наложения.
Принцип независимости действия сил неприменим при расчете балок на про­
дольно-поперечный изгиб, а также в случаях, когда материал сооружения не под­
чиняется закону прямой пропорциональности, и в некоторых других,
1
30
жению движется только однн вертикальный груз P, равный единице
(рис. 2.3). Исследуем, как меняется тот или инойфактрр (например,
опорная реакция, усилие в элементе фермы, изгибающий момент
в определенном сечении балки, прогиб балки в даннойточке и т. п.)
при перемещении груза P = 1 по сооружению. Установленный при
этом закон изменения изучаемо­
го фактора в зависимости от по*
ложения перемещающегося гру­
за P = 1. будем изображать гра­
фически.
Рис. 2.3
График, изображающий закон
изменения какого-либо фактора
(например, изгибающего момента в сечении) при передвижении по
сооружению силы Р — \ , называется линией влияния этого фактора *.
Линию влияния необходимо отличать от эпюры. Это по существу
противоположные друг другу понятия. Действительно, ординаты
эпюры характеризуют распределение изучаемого фактора (напри­
мер, изгибающего момента) по различным сечениям балки при не­
подвижной нагрузке; ординаты же линии влияния, наоборот, харак­
теризуют изменение фактора (например, того же момента), возни­
кающего в одном определенном сечении при силе P = 1, переме­
щающейся по длине балки.
§ 2.2. ЛИНИИ ВЛИЯНИЯ ОПОРНЫХ РЕАКЦИЙ
ДЛЯ ОДНОПРОЛЕТНЫХ И КОНСОЛЬНЫХ БАЛОК
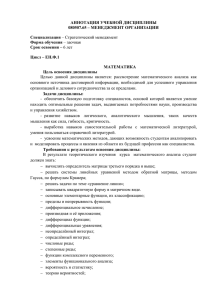
Пусть по балке на двух опорах (рис. 2.4, а) перемещается груз
P = 1. Обозначим расстояние от правой опоры до груза через x,
Это расстояние при перемещении гру­
за будет меняться от нуля, когда
груз стоит над правой опорой, до /,
когда груз станет над левой опорой.
Определим величину опорной ре­
акции R A в зависимости от расстоя­
ния x. Для этого возьмем сумму мо­
ментов всех сил относительно правой
опоры
2 ,M B= R Al— P x= 0, откуда Я л = ^ - ’
Рис. 2.4
но так как P ^ 1, то
R A = \- x ll= x lL
(2.4)
Этим уравнениемустанавливается закон изменения величины реак­
ции R A в зависимости от положения груза P = 1. Изобразив этот
закон графически, получим линию влияния опорной реакции R A.
Так как переменная x входит в уравнение в первой степени, то ли­
*
Можно строить линии влияния усилий (а также деформаций) и для случаев,
когда по сооружению движется единичная изгибающая пара или продольная сила
и т. п.
31
ния влияния будет прямолинейной1 (рис. 2.4,6):
при x = 0 R A = 0;
при x = l R A = l/l= L
Ординаты xU линии влияния опорной реакции — величины отвле­
ченные, так как размерности x и 1 одинаковы. Приступая к построе­
нию линии влияния R A (рис. 2.4, б), надо задаться масштабом. На­
пример, если принять масштаб 1 см=1 (единица), то на левой опоре
(там, где R A= \) надо отложить 1 см.
Ордината линии влияния реакции R A, измеренная на расстоя­
нии x от правой опоры, равна xU. Эта ордината численно равна ве­
личине опорной реакции R A в тот момент, когда груз P = 1 стоит
на расстоянии x от правой опоры. Или иначе: ордината линии влия­
ния R A дает величину реакции R A в тот момент, когда подвижной
груз P = 1 расположен над данной ординатой.
Для того чтобы найти с помощью линии влияния величину реак­
ции R A при заданном положении груза Я = 1, надо измерить под
этим грузом ординату линии влияния (в принятом масштабе).
Если на балку действует груз Ри то для вычисления опорной
реакции от этого груза надо ординату линии влияния, измеренную
под грузом (и дающую числовую величину реакции R A от груза
P = 1), умножить на величину Рг. В случае, когда на балку действует
несколько сосредоточенных вертикальных сил (грузов), следует
найти числовые величины опорных реакций R A отдельно от каждой
силы (умножением ординаты под силой на эту силу), а затем сум­
мированием реакций от отдельных сил получить полную реакцию от
заданной системы сосредоточенных сил.
Построим теперь линию влияния опорной реакции R B. Для
этого возьмем сумму моментов относительно левого опорного шарниpa
M A= — R Bl+ P ( l— x ) = 0,
откуда
R B= P ( l - x ) / l = 1 ( l - x ) / l = ( l - x ) / l .
(2.5)
Это уравнение представляет закон изменения числовой величины
реакции R B при перемещении груза P = L Изобразим этот закон
графически:
при x = 0 R s = l/l= 1;
при x = l R B= (l—l)/l= 0 .
На рис. 2.4, в изображена линия влияния опорной реакции
R B. Ординаты этой линии влияния — отвлеченные величины; мас­
штаб для этих ординат следует принимать тот же, что и для ординат
линии влияния опорной реакции R A.
Линии влияния, изображенные на рис. 2.4, б, e, обладают боль­
шой наглядностью. Например, можно сразу сказать, при каком по­
ложении груза Pt соответствующая опорная реакция будет наиболь­
1
32
Положительные ординаты линий влияния будем откладывать вверх.
шей. Так, для того чтобы получить от груза P 1 наибольшее значе­
ние реакции R Ay надо расположить его над левой опорой (над наи­
большей ординатой линии влияния R A).
Каждая линия влияния дает представление об измеиении только
того фактора, для которого она построена. Например, линия влия­
ния R A показывает изменение только опорной реакции R A9 а ли­
ния влияния R B— только реакции R B.
Рис. 2.5
Рис. 2.6
Далее рассмотрим балку на двух опорах с консолями, изобра­
женную на рис. 2.5, а. Очевидно, что уравнения для реакций будут
те же, что и для балки, изображенной на рис. 2.4, а. Продолжая
прямые линии, ограничивающие линии влияния на консоли, полу­
чим линии влияния R A и R Bi изображенные на рис. 2.5, б, в. Отри­
цательные ординаты линий влияния опорных реакций означают, что
когда груз P = 1 расположен над ними, опорные реакции R A и R B
отрицательны, т. e. направлены вниз.
Построим далее линии влияния опорных реакций для защемлен­
ной балки, изображенной на рис. 2.6, а. В защемленной балке воз­
никают две опорные реакции: вертикальная R A и момент М А. По­
строим линию влияния R A. Из уравнения проекций всех сил на вер­
тикальную ось
2 * ^ " ^ + ^ A = 0, откуда R A= l .
Следовательно, при любом положении груза P=1 реакция R A
равна единице. Соответствующая линия влияния построена на
рис. 2.6, б.
Рассмотрим далее построение линии влияния М А. Из условия
равновесия ^ М А = 0 имеем
M A+ 1-*=0, откуда М А = —x;
при x= 0 М А=0;
- при x = l УИА= —/.
33
Ординаты линии влияния изгибающего момента имеют размерность
длины. Поэтому масштаб для ординат линии влияния изгибающего
момента можно брать тот же, что и для длины балки. Линия влия­
ния М А изображена на рис. 2.6, в.
§ 2.3. ЛИНИИ ВЛИЯНИЯ ИЗГИБАЮЩИХ МОМЕНТОВ
И ПОПЕРЕЧНЫХ СИЛ ДЛЯ ОДНОПРОЛЕТНЫХ И КОНСОЛЬНЫХ
БАЛОК
Рассмотрим способы построения линий влияния в балке на двух
опорах. Начнем с построения линии влияния изгибающего момента
для сечения /, находящегося на расстоянии а от левойопоры и b —
от правой (рис. 2.7, а). Изгибаю­
щий момент, действующий в сече­
нии, равен алгебраической сумме
моментов внешних левых сил от­
носительно центра тяжести данно­
го сечения или же сумме моментов
правых сил, взятой с обратным
знаком [см. выражение (2.2)]. По­
ка груз находится правее сечения /
(рис. 2.7, а), т. e. пока x ^ b , левее
сечения / имеется только реакция
R A и момент в сечении / равен
• M ,= R Aa,
следовательно, линия влияния М г
может быть получена из линии
влияния R A путем умножения ор­
динат последней на а. Подставив
значение реакции R А [см. выраже­
ние (2.4)], получим
Mt=xaU.
Построим график последнего урав­
нения. Для этого вычислим два
значения Mf.
при x = 0 M /—0;
при x= b Mt=ab/l.
По этим данным строим прямую,
называемую правой прямой линии
влияния M/ (рис. 2.7, в); ее орди­
наты дают значения изгибающего
Рис. 2.7
момента в сечении /, когда груз
P = 1 расположен справа от этого
сечения, т. e. при x ^ b . Когда груз расположен левее сечения /
(рис. 2.7, б), т. e. при x ^ b , для определения изгибающего момента
в сечении удобнее рассматривать правую часть балки. Тогда М {=*
3*;
= + R Bb (момент реакции R B относительно сечения /, действующий
против хода часовой стрелки, является отрицательным, но вызывает
положительный изгибающий момент, так как рассматривается пра­
вая часть балки [см. выражение (2.2)]. Подставив в выражение для
M i= + R s b значение реакции R B [см. выражение (2.5)], получим
M, = i = i 6 .
Для построения графика этого выражения вычислим два зна­
чения М{.
при x= b M j= l(l—b)il]b=ab!l\
при x = l M i= i(l—/)//Jfr=0.
По этим данным строим прямую, называемую левой прямой линии
влияния M j (рис. 2.7, г): ее ординаты дают значения изгибающего
момента в сечении /, когда груз P = 1 расположен слева от этого се­
чения, т. e. когда x меняется в пределах от b до 1 %.
Если теперь обе части линии влияния (рис. 2.7, ву г) соединить
(рис. 2.7, д), то обе прямые (правая и левая), ограничивающие ли­
нию влияния, пересекутся под сечением /.
Если продолжить прямые, ограничивающие линию влияния М /
до вертикалей, проведенных через опоры А и В, то эти прямые отсе­
кут на левой опоре ординату а, на правой — b (рис. 2.7, д). Это
можно доказать подстановкой в уравнение М { для правой части
балки значения х —U а для левой части x = 0 . Поэтому практически
линию влияния М г часто строят следующим образом: на левой опор­
ной вертикали откладывают вверх ординату, равную в принятом
масштабе расстоянию от сечения / до левой опоры, и проводят пря­
мую через вершину этой ординаты и нулевую точку на правой опоре;
на правой опорной вертикали откладывают вверх ординату, равную
расстоянию от сечения / до правой опоры, и проводят прямую через
вершину этой ординаты и нулевую точку на левой опоре. Проведен­
ные таким образом прямые пересекаются под сечением /.
Можно рекомендовать и следующий прием построения линии
влияния Mf. сначала построить одну из прямых, например правую,
а затем для построения левой прямой соединить нулевую точку ле­
вой опоры с точкой правой прямой, расположенной под сечением I.
Ордината линии влияния М г даст числовую величину изгибающего
момента в сечении /, когда груз ^ = 1 расположен над этой ордина­
той. Следовательно, чтобы получить числовую величину изгибаю­
щего момента в сечении I при заданном положении груза Р — 1,
надо измерить ординату линии влияния М г под грузом. Отметим,
что линия влияния М г дает закон изменения момента только для
сечения /. Чтобы получить закон изменения изгибающего момента
в каком-либо другом сечении, надо для этого сечения построить
свою линию влияния.
1 Положительные ординаты линий влияния откладываем вверх. Таким об­
разом, ординаты линии влияния изгибающего момента, отложенные над осью
балки, означают, что этот момент вызывает растяжение нижних волокон балки.
35
Построим теперь линию влияния поперечной силы, возникающей
в сечении /. Поперечная сила, действующая в данном сечении, рав­
на алгебраической сумме проекций внешних левых сил (или пра­
вых сил с обратным знаком) на нормаль к оси балки [см, выражение
(2.1)]. Рассмотрим два положения груза P = 1.
1. Груз расположенправее сечения /, т. e. х-^Ъ (см. рис. 2.7, а).
Рассматривая левую часть, находим
Qi~R-A ~ х / 1 .
Для построения графика этого уравнения, вычислим два зна­
чения Q,:
при * = 0 Q,=0;
при x= b Qj=b/L
По этим данным строим правую прямую линии влияния Qr
(рис. 2.7, ё).
2. Груз расположен левее сечения /, т. e. x ^ b (см. рис. 2.7, б).
Рассматривая правую часть балки, получаем Qf= —R B (хотя реак­
ция R B направлена вверх, но так как мы рассматривали правую
часть, то R B входит в выражение поперечной силы с обратным зна­
ком [см. выражение (2.1)1. Так как R B= (l—x)U, то QL= —(/—x)/l.
Вычислим два значения Q{:
при x= b Qt=—(/—b)il= —a/l;
при x = l Qi=—(/—/) //- 0 .
По этим данным на рис. 2.7, e построена левая прямая линии влия­
ния Qf (так как ординаты отрицательны, то откладываем их вниз).
Если продолжить прямые, ограничивающие линию влияния Q7, до
опор, то получим под левой опорой ординату + 1 , а подправой опо­
рой — ординату —1. Убедиться в этом можно, подставив в первое
из уравнений для Q, значение x = l , а во второе — значение * = 0 .
Поэтому линия влияния Qj может быть построена так, как это сде­
лано на рис. 2.7, ж. На левой опорной вертикали откладываем
вверх ординату + 1 , на правой опорной вертикали откладываем
ординату — 1 (вниз) и их вершинысоединяемснулевымиточками
левой и правойопор. Проведениые таким образом две прямые па­
раллельны. После этого сносят сечение / так, как это показано на
рис. 2.7, ж.
Линия влияния Q, в сечении / имеет скачок — разрыв. Орди­
наты линии влияния поперечной силы — величины отвлеченные.
Поэтому масштаб этих ординат будет такой же, как и для опорных
реакций. Ордината линии влияния Q, дает числовую величину по­
перечной силы в сечении /, когда груз P = 1 расположен над данной
ординатой. Следовательно, чтобы получить числовую величину по­
перечной силы в сечении I при заданном положении груза P = 1,
надо измерить ординату линии влияния Q{ под грузом.
Если ордината под грузом отрицательна, то это значит, попереч­
ная сила в сечении / при данном положении силы P = 1 отрицательна.
Ординаты линии влияния Q, характеризуют изменение поперечной
36
силы только для сечения /. Чтобы получить закон изменения попе­
речной силы в каком-либо другом сечении, надо для этого сечения
построить свою линию влияния.
Построим линии влияния момента и поперечной силы в сече­
нии / для защемленной балки, изображенной на рис. 2.8, а. Перво­
начально рассмотрим линию влияния Mj.
Рассмотрим два положения груза.
1. Груз левее сечения I (на рис. 2.8, а
он показан сплошной линией) M j= 0.
2. Груз правее сечения I (на рис. 2.8, а
он показан штриховой линией) М г= — l x
x X i= —х 19 где xt— расстояние от груза
до сечения /;
при х г= 0 M f= 0;
при x1= a M f = —b.
Соответствующая линия влияния показана
Рис. 2.8
на рис. 2.8, б.
Для построения линии влияния поперечной силы в сечении /,
аналогично предыдущему, рассмотрим два положения груза:
1.
Груз левее сечения
Qt= 0 (так как слева нет никаких сил).
Рис. 2.9
Рис. 2.10
37
2. Груз правее сечения
Q r= i,
т. e. на всем протяжении от сечения / до правого конца балки орди­
наты линии влияния остаются постоянными и равными 1.
Соответствующая линия влияния изображена на рис. 2.8, в. На
рис. 2.9, 2.10 изображены балки на двух опорах с консолями и
построены линии влияния моментов и поперечных сил в различных
сечениях. Для сечений, расположенных между опорами, линии
влияния строятся аналогично балке на двух опорах (см. рис. 2.7),
а для консолей, как для защемленной балки (см. рис. 2.8). Как
видим, линии влияния M и Q для сечения, взятого в пределах кон­
соли, имеют совершенно иной вид, чем линии влияния M и Q для
сечения, взятого между опорами. При
построении линий влияния поперечных
сил у опор взято по два сечения: сече­
ния IIa и У/ярасположены бесконечно
близко к опорам слева от них, а сече­
ния IIb и VIb — тоже бесконечно близ­
ко к опорам, но справа от них. Вид
линий влияния Q (рис. 2.10) для двух се­
чений у одной и той же опоры (слева и
справа от нее) различен.
Пример. Построить лииии влияния изгибаю­
щего момента и поперечной силы для сечения m
балки, изображенной па рис. 2 . 1 1 , а, при движе­
нии груза P = I по балке верхнего этажа.
Рис. 2.11
P e ш e н и e. Построим сначала линию
влияния опорной реакцни R^. Величина реак­
ции RA ПРИ положении грула P= I на балке верхнего этажа, жестко связанного
с помощью элемента pq с балкой AB, равна
RA=(l-xVL
Соответствующая линия влияния изображена на рис. 2.11,6.
Изгибающий момент в сечении m балки AB при положении груза иа балке
верхнего этажа равен
M m= R Aa.
Следовательно, линия влияния изгибающего момента М т имеет вид линии
влияния опорной реакции R^, все ординаты которой умножены на постоянный
коэффициент а. Линия влияния М т изображена иа рис. 2.U , в.
Подобным же образом строится и линия влияния поперечной силы Qm
(рис. 2 . 1 1 , а); она ничем не отличается от линии влияния опорной реакции R^.
§ 2.4. ЛИНИИ ВЛИЯНИЯ ПРИ УЗЛОВОЙ ПЕРЕДАЧЕ НАГРУЗКИ
До сих пор мы рассматривали случаи, когда внешние силы при­
ложены непосредственно к балкам. В практике же (например, в мос­
товых конструкциях) нагрузки часто передаются на балку лишь
в определенных местах посредством других балок (рис. 2.12,a),
В этих случаях основная балка называется главной; балки, распо­
38
ложенные перпендикулярно к главной балке, называются попереч­
ными, а верхние однопролетные балки, к которым непосредственно
прикладывается нагрузка, продольными (вспомогательными). Та­
кой способ передачи нагрузки на главную балку называют узловым,
а сечения главной балки, в которых к ней примыкают поперечные
балки,— узлами. Участок бал­
ки между двумя соседними уз­
лами называется панелью.
Действие груза P , приложен­
ного к продольной (вспомогатель­
ной) балке в пролете mn> пере­
дается на главную балку только
в узлах m и n, в которых распо­
ложены поперечные балки, под­
держивающие данную продоль­
ную (вспомогательную). На чис­
ловую величину опорных реак­
ций главной балки узловая пе­
редача нагрузки не влияет, в чем
легко убедиться, составив урав­
нение моментов внешних сил от­
носительно любой из опор. Поэ­
тому при узловой передаче на­
грузки линии влияния опорных
реакций R A и R B будут такими
же (рис. 2Л2, б, в), как и при на­
грузке, приложенной непосред­
ственно к главной балке.
Что касается линии влияния
изгибающего момента в сечении
главной балки, например в сече­
Рис. 2.12
нии / (с абсциссой а), то величина
М { остается такой же, как и при нагрузке, непосредственно прило­
женной к этой балке, пока груз находится на участках Ат и nB ,
т. e. в любом месте, за исключением панели mn, в которой располо­
жено сечение /. В этом можно убедиться, составив уравнения изги­
бающего момента в сечении / при указанных положениях груза.
Например, когда груз стоит в узле n или правее него, M := R Aa 9
так как левее сечения I нет других сил, кроме реакции R A\ такое
уравнение совпадает с полученным в начале § 2.3 для случая не­
посредственной (не узловой) передачи нагрузки. Аналогично дока­
зывается это и для участка Ат. Поэтому, построив линию влияния
М 1 в предположении, что нагрузка приложена непосредственно
к главной балке (рис. 2.12, г), можно заштриховать эту линию влия­
ния на участках Ат и nB.
Когда же груз находится на панели mn, то воздействие его на
балку передается в узлах m и n в виде опорных давлений R m и R n
вспомогательной балки mn (на рис. 2.13, а они показаны штрихо­
выми линиями).
39
Для того чтобы установить, какой вид имеет линия влияния М (
на участке mn, докажем, что при узловой передаче нагрузки линия
влияния любого усилия 1 в сечении / главной балки при движении
груза P = 1 в пределах той панели mn, в которой расположено сече­
ние, представляет собой прямую, соединяющую вершины крайних
(узловых) ординат этой панели.
Пусть при грузе P = 1, расположенном в узлах m и n , ординаты
линии влияния усилия S[ главной балки равны соответственно у т
и у п (рис. 2.13, б). Напоминаем, что эти ординаты определяются
так же, как и при непосред­
ственной передаче нагрузки
на главную балку. Рассмот­
рим, как будет меняться уси­
лие S/ при движении груза по
вспомогательной балке между
узлами m и n (рис. 2.13, а).
При движении груза по
вспомогательной балке в узлы
m и n передаются силы R m
Рис. 2.13
и R n. Усилие S r главной бал­
ки от действия на нее в узлах m и n сил R m и Rn на основании прин­
ципа независимости действия сил равно
S l ==^ j f 3y ==R m ym ~^~ R n U n ,
где
R m= P z/d = h z/d = z/d ;
R n = P (d—z)/d= 1 (d—z)/d=(d—z)/d;
здесь d — длина панели; z — расстояние от груза P = 1 до правого
узла (узла rt) рассматриваемой панели.
После замены R m и R n их выражениями, получим
Si=(z/d) y m+[(d~z)/d]ya.
Таким образом, величина S, при движении нагрузки между уз­
лами m и n выражается линейной функцией от z:
при z= 0 S ,= y n;
при z= d S [—у т.
Следовательно, линия влияния усилия S, главной балки при
движении груза P = 1 между узлами m и n есть прямая, соединяющая
вершины узловых ординат у т и у п. Эту прямую условимся называть
передаточной.
Соединив передаточной прямой вершины ординат у т и у пу полу­
чим изображенную на рис. 2.12, г линию влияния M,.
Аналогично производится построение и линии влияния попереч­
ной силы Qf. На участках Ат и nB ординаты линии влияния будут
такие же, как и при нагрузке, приложенной непосредственно к
балке. На протяжении же панели тпу в которой находится сечение
1 Или перемещения, например прогиба.
40
/, через вершины ординат под узлами m и n надо провести передаточ­
ную прямую (см. рис. 2.12, с?).
Таким образом, мы установили следующий порядок построения
линии влияния при узловой передаче нагрузки:
1) сначала строят линию влия­
ния без учета узловой передачи,
т. e. в предположении, что на­
грузка приложена непосредст­
венно к главной балке;
2) затем на такой линии
влияния отмечают узловые орди­
наты рассеченной панели (т. e.
панели, имеющей сечение, для
которого строится линия влия­
ния) и вершины их соединяют
передаточной прямой.
На рис. 2.14 построены ли­
нии влияния M и Q для сечений
/ и I I консольной балки.
Рис. 2.14
Для опорных реакций линии
влияния не приведены, так как
они такие же, как и при непосредственном действии нагрузки на
балку.
§ 2.5. ОПРЕДЕЛЕНИЕ УСИЛИЙ С ПОМОЩЬЮ ЛИНИЙ ВЛИЯНИЯ
В предыдущих параграфах настоящей главы рассматривались
вопросы, связанные с построением линий влияния.
Теперь покажем, каким образом производятся вычисления уси­
лий 1 с помощью линий влияния.
При этом рассмотрим действие сле­
дующих двух видов нагрузки:
1) сосредоточенных сил; 2) равно­
мерно распределенной нагрузки.
Действия сосредоточенных сил.
В § 2.2 было указано, что для
определения какого-либо усилия,
вызванного грузом Р и надо под
грузом измерить ординату линии
влияния этого усилия и умножить
ее на числовую величину груза.
Если на сооружении стоитнесколько грузов (рис. 2.15, а), то на ос­
Рис. 2.15
новании принципа независимости
действия сил то же самое следует проделать для каждого груза
(т. e. ординату линии влияния под каждым грузом умножить на
числовую величину груза) и полученные результаты сложить.
1 Или перемещеиий, иапример прогибов.
41
Для определения, к-апример, изгибающего момента в сечении /
(линия влияния M j построена на рис. 2.15, б) следует числовую ве­
личину груза Pi помножить на ординату h^ линии влияния М г (так
как ордината кг отрицательна, то и произведение P-Jix будет отри­
цательно), числовую величину груза Р 2 — на ординату h 2, а груза
Р 3— на ординату Л3.
Изгибающий момент M j от действия грузов Ри Р 2 и Р 3 будет
равен:
M t = ^ P h = - P i h + PJlz + PJlz.
Ординаты линии влияния М7 измеряются в масштабе длин. Если
единица силы — ньютон (H), а ординаты М 1— метр (м), то единица
изгибающего момента Ph будет ньютон-метр. (Н-м).
Аналогично вычисляется и поперечная сила в сечении / (линия
влияния Qt построена на рис. 2.15,e);
Q t= P iK -P * K + P sh ',
где h'u h 2 и h 3 — ординаты линии влияния Q7 соответственно под гру­
зами Р г, Р 2 и Р 3.
Ординаты линии влияния поперечной силы — величины отвле­
ченные. Следовательно, произведения PW, дающие числовые вели­
чины поперечной силы, будут иметь такую же размерность, как и
сила Р.
Подобным же образом можно найти и величины опорных реакций
с помощью соответствующих линий влияния.
Итак, чтобы вычислить какой-либо фактор (опорную реакцию,
изгибающий момент, поперечную силу, усилие в каком-либо эле­
менте фермы и т. д.) от нескольких сосредоточенных сил, надо на
построенной для этого фактора линии влияния измерить ординаты
под грузами и найти алгебраическую сумму произведений числовых
величин грузов на соответствующие им ординаты линии влияния.
Пример. Определить с помощью линии влияния изгибающий момент в сече­
нии / балки от заданных трех сил. Размеры балки, величины и расположение сил
показаны на рис. 2.16, а. Лииия влияния M 7 построена на рис. 2.16, б. Числовые
величииы ординат под силами указаны на линии влияния; эти ординаты можно
или определить графически по масштабу, или вычислить аналитически.
Изгибающий момент в сечении / равен.
M / = —4 ‘0,5+8 • 1,0 + 1 0 -1,0= 16,0 кН -м.
Минус у первого члена взят потому, что ордината hx— отрицательна.
Действие равномерно распределенной нагрузки. Порядок рас­
чета в этом случае рассмотрим на следующем примере. На некотором
участке балки (рис. 2.17, а) приложена равномерно распределенная
нагрузка интенсивностью q. Требуется определить изгибающий мо­
мент в сечении I (линия влияния M , построена на рис. 2.17, б).
Заменяем на бесконечно малом участке dx распределенную нагрузку
сосредоточенной силой qdx (см. рис. 2.17, а). От этой сосредоточенной
силы момент в сечении I равен qdx hx, где hx— ордината линии
влияния M j под силой. Всю распределенную нагрузку можно пред­
ставить как бесконечно большое число сосредоточенных сил qdx.
42
Чтобы найти момент от всех этих сил, надо взять сумму всех про­
изведений qdxhx. Следовательно,
d
d
Mj = j q&xhx = q J hxdx,
С
с
здесь q как постоянная величина вынесена за знак интеграла. Пре­
делы интегрирования (от с до d) показывают, что суммирование
Рис. 2.16
Рис. 2.17
надо произвести по всему участку балки, на котором действует pacпределенкая нагрузка. Выражение, оставшееся под знаком интегра­
ла, представляет собой не что иное, как элементарную площадку
линии влияния M , (на рис. 2.17, б эта площадка заштрихована на­
клонными линиями). Интеграл в пределах от с до d равен площади
линии влияния M j на участке o r x = C R o x = d , заштрихованной на
рис. 2.17, б. Если обозначить эту площадь о), то
М г=^со.
Итак, для определения числовой величины усилия от равномер­
но распределенной нагрузки надо найти площадь соответствующей
части линии влияния этого усилия (в пределах расположения рас­
пределенной нагрузки) и умножить ее на интенсивность нагрузки.
Если распределенная нагрузка расположена над линией влия­
ния, состоящей из нескольких участков разных знаков, то числовая
величина усилия равна произведению интенсивности нагрузки на
алгебраическую сумму площадей отдельных участков линии влия­
ния. Так, для определения поперечной силы в сечении /, линия
влияния которой построена на рис. 2.17,e, надо найти числовые
величины площадей щ и а)2, заштрихованных на рисунке, и под­
ставить их в выражение
Qi—?(w i+o)2)43
Знаки площадей берут соответственно знакам ординат на тех
участках, где вычисляются эти площади; в данном случае площадь
«а надо взять со знаком минус.
Пример 1. Для балки пролетом 1, загруженной равиомерно распределенной
нагрузкой q (рис. 2.18, а) с помощью линий влияния определить опориую реакцию
Яд, изгибающий момент M / и поперечную силу Q/ в середине балки. Лииии влия­
ния Яд, M i и Qf построены на рис. 2.18, б — г.
Так как нагрузка расположена на всем пролете, то площади линий влияния
надо вычислять иа протяжении всего пролета.
P e ш e н и e. О п p e д e л e н и e p e а к ц и и R^. Площадь линии влия­
ния
опорная реакция
Oj=(//2) •1~//2;
RA=q^x=ql/2.
О
влияния
n p e д e л e н и e и з г и б а ю щ e г о м о м e н т a M /. Площадь линии
ю2=(//2)(//4)=Л Й ;
изгибающий момент
Mj=qto2=qP/8.
О
п p e д e л e н и e п о п e p e ч н о й с и л ы QT. Линия влияния состоит
из двух участков; площади со3 и а>4 одинаковы по величине, ио различны по знаку:
ю3= (— 1/ 2 ) (t/2) ( 1/2 ) = - / / 8 ; ю4= + //8 .
Поэтому
Q j - q (©з+ <*>4)=<7 (—//8 ) + (//8 ) = 0 .
Рис. 2.18
Рис. 2.19
Пример 2 . Определить с помощью линий влияния изгибающий момент и по­
перечную силу в сечении I консольной балки от заданной нагрузки (рис. 2.19, а).
Р е ш е н и е . Сначала строим для сечения / линии влияния Af/ и Q/
(рис.2.19,б,в).
Определение изгибающего момента Mf. Ордината линии влияния M j под
силой P равна ht= —1,6 м; площадь линии влияния под нагрузкой равна
toi==8-l,6/2=6,4 м2.
Следовательио,
М [——P h y ^ q ^ - —3 • 1 ,6 + 2 *6,4=8,0 кН *м.
44
Определение поперечной силы Qr. Ордината линии влияния Q/ ц0д силОЙ^
равна h2=0,2f площадь линии виляния под нагрузкой
соа= 8 ’0,8/2=3,2 м.
Следэвательно,
Q/= ^^ 2-^^,c02 = 3 -0 ,2 + 2 *3,2=7,0 кН.
Докажем теперь, что усилие S от нагрузки (от сосредоточенных сил и распре­
деленной нагрузки), расположенной над прямым участком линии влияния, может
быть определено умножени­
ем равиодействующей силы R
на ординату h0 линии влия­
ния S под эгой силой. Опре­
делим для этого с помощью
линии влияния S, изображен­
ной на рис. 2.20, усилие S от
грузов Ръ Р 2, Р3, . . . , Р п
(расположенных над прямым
участком cd линии влияния),
равиодействующей которых
является сила R:
Рис. 2.20
S=2Pfc=PA+JPaA*+
+ P J h '. • *+ЛАг*
Выразим ординаты линии влияния через расстоянияотточекприложения
грузов до точки 0 — пересечения прямых ae и cd (рис. 2 .2 0 ):
fci=fljtga; Л2= a2tg a; ft3= a 3tga; . . .; ft„=arttga.
Подставив эти значения ординат в выражение S, получим
S=(P^u^j-Pг^г+^з^зН-* • *“Ь^л^яНб^*
Выражеиие, стоящее в скобках, представляет собой момент грузов Рх, Р 2, Р3,
. . ., Рп относительно точки О, а он, как известно, равен моменту равнодействую­
щей силы R относительно этой же точки, т. e, Ra0 (рис. 2.20). Следовательно,
S=flootg a =RfiQ,
что и требовалось доказать.
§ 2.6. ОПРЕДЕЛЕНИЕ НЕВЫГОДНЕЙШЕГО ПОЛОЖЕНИЯ
НАГРУЗКИ НА СООРУЖЕНИИ. ЭКВИВАЛЕНТНАЯ НАГРУЗКА
В предыдущем параграфе было доказано, каким образом с по­
мощью линии влияния определяются различные усилия (например,
опорная реакция, изгибающий момент, поперечная сила и т. д.)
от нагрузки, расположение которой задано. Теперь покажем, как
надо расположить заданную нагрузку на сооружении, чтобы она
вызвала наибольшее значение рассматриваемого усилия. Такое
положение нагрузки называется невыгоднейшим или опасным.
1.
Случай действия на сооружение подвижной равномерно распределенной нагрузки. В § 2.5 было показано, что числовая величина
усилия S от равномерно распределенной нагрузки равна произведе­
нию интенсивности нагрузки q на площадь линии влияния, изме­
ренную в пределах расположения нагрузки, т. e. S=^w. Так как
интенсивность нагрузки q есть величина постоянная, то максималь­
ное значение искомого усилия получится при наибольшем значении
45
площади о, а это будет в том случае, когда нагрузка q расположится
над всей площадью линии влияния одного знака \
На рис. 2.21, а показано загружение равномерно распределенной
нагрузкой, соответствующее ш ахМ 7 (загружена вся положительная
часть линии влияния M/), а на рис. 2.21,5,— соответствующее
min М г (загружена вся отрицательная часть линии влияния). На
рис. 2:22, a> показано загружение, соответствующее max Qr (за­
гружены оба положительных участка линии влияния). Наконец,
Рис. 2.21
Рис. 2.22
на рис. 2.22, б показано загружение, соответствующее min Q, (за­
гружена вся отрицательная часть линии влияния).
2.
Случай действия системы жестко связанных сосредоточенных
сил 2. Система жестко связанных подвижных сосредоточенных сил
Рис. 2.23
Рис. 2.24
моделирует действие движущегося экипажа или поезда. Если все
грузы находятся над прямолинейным участком линии влияния, то,
как следует из предыдущего параграфа, их действие можно заменить
равнодействующей (см. рис. 2.20). Рассмотрим систему жестко свя­
1 Предполагается, что длина участка, на котором может действовать распре­
деленная нагрузка, больше длины загруженного участка линии влияния.
2 Текст взят из кн.: СмирновА. Ф., АлександровА. В ., ЛащениковБ. А . 4
Шапошников tf. Я, Строительная механика стержневых систем. М., 1981, с, 141—
145,
46
занных грузов, изображенных на рис. 2.23, положение которых бу­
дем характеризовать координатой x (расстояние от начала линии
влияния до первого груза). Допустим, что система грузов переме­
стилась на Дх, при этом ни один из грузов не сошел с участка а — fr.
Очевидно, что при таком перемещении равнодействующая тоже
переместится на Дл: и ордината под ней изменится на ДЛ:
Ah = Ax tg а.
Значит, усилие S получит приращение
A S = R A h = R A x tg а.
В общем случае, когда загружено несколько участков линии
влияния, нельзя заменить всю нагрузку равнодействующей, но
можно сделать это на каждом участке (рис. 2.24), тогда
s = 2 RAi~ i
Если нагрузка переместится на небольшое расстояние Ах так,
что все грузы останутся на тех же участках, то равнодействую­
щие на всех участках не изменятся, а усилие S получит прира­
щение
n
n
A S = i2- f1t / t g a , - A x = A xi2- ^1 < * g a i i
откуда
(2-6)
n
4 f- = E * / * g a / -
(2.7)
i= 1
В соответствии с выражением (2.6) приращение усилия линейно
зависит от Axj пока ни один из грузов не перейдет через вершину
n
(X ^*tg a*=Fconst), следовательно, график изменения усилия в за* 1
висимости
от Дхбудет линейным. Причем, перелом возникает в том
случае, когда один из грузов пе­
реходит через вершину линии
влияния. На рис. ,2.25 изобра­
жен график зависимости усилия
S от положения грузов, харак­
теризуемого координатой x (см.
рис. 2.24). В соответствии с рис.
2.25 и выражением (2.7) имеем
tgP = S */tga/.
i- 1
Критерием
n
(2.8)
Рис. 2.25
достижения 5 тах будет изменение знака выражения
^ R i t g a,i при переезде грузов через одну из вершин линии влияния
либо обращение в нуль этой суммы, что соответствует горизонталь47
иой линии на графике в верхней части рис. 2.25. Обратим внима­
ние на то, что этот критерий не является корректным, если график
имеет несколько максимумов. Критерий позволяет определить
только локальный (местный) максимум, но практически этого бывает
достаточно. При вычислении вручную трудно перебрать все возмож­
ные положения груза над вершинами. В каждом конкретном случае
положение, близкое к невыгодному, можно установить по смыслу и
далее исследовать небольшое число положений грузов над вершиn
нами, найдя при каком из них Ееличина y^Ritg а* изменяет знак.
/«=i
Наиболее часто встречающимся случаем является загружение
треугольной линии влияния (рис. 2.26), когда задача решается
проще. Сумма (2.8) записывается в виде
R
f<y п
лев t g а лев
___г>
to- п
___
^ n p Т£ а пр “
КлеъУ _
a
^ H P У __ ! #л ев _
^
— ^
a
^ ПР \ и .
£
J У
Ее знак не зависит от величины у и задача нахождения опасного
загружения сводится к определению того груза, переход которого
через вершину линии влияния
изменяет знаквеличины Ялев/а—
—
критическим. Задачу нахожде­
ния груза Р кр можно сформули­
ровать по-другому. Допустим,
этот груз найден, тогда можно
мысленно его «расщепить» на
две части, включив одну часть
в Ялев. другую— в R„v так,
что разность R xeJ a — R nv/b обРис. 2.26
ратится в нуль. В этом слу­
чае R ^ j R ^ = a/b. Задача на­
хождения невыгодного загружения упростилась до определения та­
кого положения нагрузки, при котором она делится в заданном
отношении. Итак,
^лев/^пр= Я/^*> ^ = ^лев + ^пр*
(2-9)
где R — полная равнодействующая.
Решая систему (2.9), получим
Я лев=4^;
*np=^.
(2.10)
Формулы (2.10) могут быть использованы только в том случае,
когда поезд полностью располагается над треугольной линией
ялияния. Поскольку невыгодное положение нагрузки не зависит от
размера ординаты у , можно для каждого вида подвижной нагрузки,
а также различных 1 и all найти Smax при y = l . Далее можно дей­
ствие подвижной нагрузки при невыгодном ее расположении заме­
нить действием нагрузки, равномерно распределенной по всей
48
R nv/b
длине 1. Она называется эквивалентной нагрузкой. Ее интенсивность
qs находится приравниванием Smax= y S max и результата загружения треугольника равномерно распределенной нагрузкой:
*^rnax = У ^т ак = Яэ ^ ~2~ ^У ^ ’
Откуда
q9 = 2Smax//.
Эквивалентная нагрузка зависит от длины треугольной линии
влияния /, положения ее вершины a= a/l и типа подвижной нагруз­
ки. Имеются готовые таблицы эквивалентных нагрузок для различ­
ных типов электровозов, тепловозов, вагонов и т. д. при a = 0 ,
a = 0 ,5 и l = l —200 м, которые приведены в соответствующих норма­
тивных документах, например, в «Указаниях по определению усло­
вий пропуска поездов по железнодорожным мостам».
При выполнении конкретного расчета инженер-проектировщик
пользуется табличными значениями q3. Максимально возможное
усилие вычисляется через площадь линии влияния о по формуле
^ т а х ~ Я э^‘
Пример. На рис. 2.27, а показана схема сплотки (двух секций) электровозов
ВЛ-84. Расстояиие между осями указаны в м, а силы (давление на оси) в кН. На
рис. 2.27, б показана треугольная линия влияния. Требуется определить невы­
годное расположение сплотки электровозов и эквивалентную нагрузку.
P e ш e н и e. Вычислим равнодействующую Я =8*250 = 2000кН.
По формуле (2.10) определим к лев:
_ 2000-15 _ m
_
^лев—
gQ —500 кН.
Вычислим отношение, указывающее, сколько грузов входит в Ялев:
^лев _^00__ л
250
250
Принимаем в качестве критического 7-й груз (см. рис. 2.27, a, б) и относим
его целиком к Ялев* Вычислим Smax:
«Smax = 250#8^- 250i/7 4~ 250губ4- 250yb ^- 250y±^- 250y3+ 250y2^- 250^ =
= 250 (#8+#7+#6 + #5 + #4 + #3 + #2 + #l)*
(2-H)
Для определения ординат линии влияния под грузами иайдем расстояния
от грузов до начала и конца линии влияния (рис. 2.27, а)9 Далее вычисляем
^ 2 а лев и ^ g ОСПр!
*
У
j.
У
t£ °^лев —Jg >
’ ^g a np—Jg •
В соответствии с рис. 2.27, а и формулой (2.11) имеем
Smax = 250 ^
( 12,150 + 15) + ^ (16,236 +19,086 + 26,093 + 28,943 +
+35,143 + 37,993)j=1361j/.
(2.12)
^max = ~2 Я3е
0“ ~2 ^ ^ = ~2 ^ ^ *^ "
(2 ^)
С другой стороны,
49
Приравнивая выражеиия (2.12), (2.13) и сокращая на у у получим
30^3 = 1361, откуда q3=
1361
^
= 4 5 ,4 кН/м.
Можио для определения S max использовать формулу (2.10):
„
2000-45
1СЛЛ
R»=
60
= 1 5 0 °-
Рис. 2.27
^np
1500
Вычисляем отношение ■^ Q — 12 5 0 " ^
принимаем в качестве критического
6-й груз (рис. 2.27, в) и включаем его в равнодействующую правых сил # пр.
Аналогично предыдущему, вычислим
Smax = 250 ^ ( 5 , 1 4 3 + 7,993 + 1 5 )+ ^ (2 3 ,2 4 3 + 26,093 + 33,l +
+ 35,95 + 42,15)j = 13611/.
(2.14)
Усилия по выражениям (2.14) и (2.12) совпали: ЯЛев (аналогично R n) со­
держит целое число нагрузок, поэтому критических грузов получилось два.
Если это условие не выполняется, критический груз будет единственным.
50
§ 2.7. МНОГОПРОЛЁТНЫЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЛКИ
Статически определимая неизменяемая система, состоящая из
ряда однопролетных балок (с консолями и без консолей), соединен­
ных между собой шарнирами, называется многопролетной статичес­
ки определимой или многопролетной шарнирной балкой.
Однопролетные балки, составляющие многопролетную статически
определимую балку, могут быть все сплошными или сквозными
(т. e. фермами) или частью сплошными, а частью сквозными. Теория
расчета таких балок была разработана инженером Г. Семиколеновым в 1871 г.1
При решении вопроса о статической определимости и геометриче­
ской неизменяемости многопролетной шарнирной балки следует
Рис. 2.28
иметь в виду, что такую балку всегда можно получить из неразрез­
ной, т. e. статически неопределимой балки, включив в нее ряд шар­
ниров. Число таких шарниров, как увидим ниже, равно степени
статической неопределимости неразрезной балки.
На рис. 2.28, а показана пятипролетная неразрезная балка. Она
прикреплена к основанию с помощью семи опорных стержней. Для
определения усилий в этих стержнях можно составить только три
независимых уравнения равновесия. Поэтому такая балка не может
быть рассчитана с помощью уравнений статики; она четыре раза
статически неопределима.
Если число всех опорных связей неразрезной балки обозначить
С, то степень статической неопределимости (или число лишних не­
известных) n будет равна ti=C—3.
Применив эту формулу для балки, изображенной на рис. 2.28, а,
получаем
n = 7—3 = 4 .
1 См.: СемиколеновГ. Теория уравновешенных балок, Изд-во типографии
Академии наук в С.-Петербурге, 1872,
51
Каждый шарнир, установленный в пролете или на опоре нераз­
резной балки, позволяет составить одно дополнительное уравнение
статики — условие равенства нулю суммы моментов относительно
шарнира всех сил, приложенных к балке по одну сторону от него.
Если поместить в неразрезной балке столько шарниров, сколько она
имеет лишних неизвестных, то статически неопределимая балка
обратится в статически определимую, так как в этом случае все
неизвестные можно будет найти с помощью уравнений статики.
Шарниры в балке при этом должны быть расположены таким
образом, чтобы система во всех своих частях была статически опре­
делимой и неизменяемой г.
На рис. 2.28, б — д приведены различные схемы расположения
шарниров, позволяющие превратить балку, изображенную на
рис. 2.28, а, в статически определимую.
Рис. 2.29
Рис. 2.30
На рис. 2.28, e показана неудачная расстановка шарниров. Хотя
общее число поставленных шарниров в балке и равно здесь четы­
рем, т. e. числу лишних неизвестных в соответствующей ей нераз­
резной балке (рис. 2.28, а), но часть балки AB получилась статически
неопределимой, а часть ВС — изменяемой (возможные для этой
части перемещения указаны на рис. 2.28, e штриховой линией).
Рис. 2.31
Рис. 2.32
На рис. 2.29, а показана неразрезная балка с одним заделанным
концом. Напомним, что заделка содержит три связи (схема такого
закрепления изображена на рис. 2.30). Поэтому здесь общее число
связей C = 7, а число лишних неизвестных n = C —3 = 4 . Следова­
тельно, для превращения балки в статически определимую необхо­
димо поместить в ней четыре шарнира (например, как это показано
на рис. 2.29, б).
На рис. 2.31, а изображена балка с двумя заделками, причем
правая заделка имеет горизонтальную подвижность. Такая заделка
1
Пример исследования геометрической неизменяемости многопролетной шар­
нирной балки был рассмотрен в конце § 1.2.
52
может быть схематически изображена двумя связями, как это по­
казано на рис. 2.32.
На рис. 2.31, а число связей балки C = 8 , а потому r t = C - 3 = 5 .
Следовательно, для того чтобы балка стала статически определимой,
необходимо поставить пять шарниров, например, так, как это по­
казано на рис. 2.31, б.
Для решения вопроса о неизменяемости многопролетной балки,
а также для более наглядного представления о ее работе следует
изображать схему взаимо­
действия отдельных элементов
балки.
Исследуем, например, из­
меняема ли балка, приведен­
ная на рис. 2.33, а. Схема
взаимодействия ее элементов
представлена на рис. 2.33, б.
На этой схеме промежуточ­
Рис. 2.33
ные шарниры заменены шар­
нирно-неподвижными опорами, соединяющими отдельные элементы
балки. Из схемы видно, что система неизменяема, так как она пред­
ставляет собой ряд двухопорных балок, связанных с «землей» или
с геометрически неизменяемыми системами с помощью трех стерж­
ней, оси которых не пересекаются в одной точке.
В самом деле, балка ABE связана с «землей» тремя опорными
стержнями и, следовательно, представляет собой геометрически
неизменяемую систему. Выше расположенная (на схеме) балка ECF
Рис. 2.34
Рис. 2.35
одним своим концом прикреплена с помощью двух стержней к гео­
метрически неизменяемой балке A B E , а в точке С опирается на
вертикальный опорный стержень, связывающий ее непосредственно
с «землей». Такая связь обеспечивает балке полную неподвижность.
Аналогично прикрепляется и еще выше расположенная
балка FD. Из приведенных схем можно вывести следующие правила
установки шар*ниров для балок без заделанных (защемленных)
концов:
t) в каждом пролете может быть установлено не более двух шар­
ниров;
2)
пролеты с двумя шарнирами должны чередоваться с проле­
тами без шарниров;
63
3)
пролеты с одним шарниром могут следовать один за другим
(начиная со второго пролета).
До сих пор рассматривались случаи, когда все опоры, кроме
одной, подвижны в горизонтальном направлении. Теперь посмот­
рим, как будут выглядеть расчетные схемы балок, если две (или
более) опоры неподвижны в горизонтальном направлении. В этом
случае постановкой обычных шарниров невозможно обратить не­
разрезную балку в статически определимую неизменяемую систему.
Потребуется установить еще так называемые подвижные шарниры,
допускающие взаимные горизонтальные перемещения соединяемых
частей балки. Схема подвижного шарнира изображена на рис. 2.34.
Рис. 2.36
Пример статически определимой балки с тремя опорами, неподвиж­
ными в горизонтальном направлении, и двумя подвижными шар­
нирами приведен на рис. 2.35, а; схема взаимодействия ее элементов
показана на рис. 2.35, б.
Читателю предлагается установить зависимость между числом
опор, неподвижных в горизонтальном направлении, и числом под­
вижных шарниров.
Рис. 2.37
Многопролетные шарнирные балки, наиболее часто применяемые
на практике, изображены на рис. 2.36, а и 2.37, а. Для первой из
них (рис. 2.36, а) характерно чередование пролетов, имеющих по
два шарнира, с бесшарнирмыми; она состоит из ряда двухконсоль­
ных балок, на концы которых опираются однопролетные подвесные
балочки (рис. 2.36, б). Для второй (рис. 2.37, а) характерно наличие
одного шарнира в каждом пролете, за исключением одного крайнего
пролета; схема взаимодействия ееэлементов показана на рис. 2.37, б.
54
Рис. 2.38
Заметим, что благоприятное разгружающее действие консолей
используется не только в балках сплошного сечения, но и в сквоз­
ных конструкциях, например в многопролетной ферме, изображен­
ной на рис. 2.38. Реакции опор такой фермы находят теми же при­
емами, как и в многопролетной шарнирной балке.
§ 2.8. ОПРЕДЕЛЕНИЕ УСИЛИЙ В МНОГОПРОЛЕТНЫХ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ БАЛКАХ ОТ НЕПОДВИЖНОЙ
НАГРУЗКИ
Порядок расчета многопролетных шарнирных балок покажем
на частном примере балки, приведенной на рис. 2.39, а. На
рис. 2.39, б показана схема взаимодействия элементов этой балки.
Рис. 2.39
55
Расчет балки начинаем с определения опорных реакций. В пер­
вую очередь следует определить реакции подвесных элементов
AUIt и UI^D, так как для расчета основного элемента Ш^Шг необхо­
димо знать числовые величины давлений от подвесных элементов
в шарнирах Шх и Ш2.
Э л е м е н т АШХ (рис. 2.39, в)
Из уравнения
2 М ш = Я Аа г— Р г (а 4- а х) = 0
получаем
D
P, (a + fli)
К * ~ ----- at---- •
Реакция шарнира Шг (положительным считаем направление ее
снизу вверх) может быть найдена из уравнения
2 м л = — R m ' f l i — P i a = 0,
откуда
n
К
__
ш
~
—
Pia
sr
*
Знак минус означает, ч т о р е а к ц и я Я ^ н а п р а в л е н а в обратную
сторону, т. e. сверху вниз.
Давление Vui на основной элемент ВС в шарнире Шх численно
равно, но противоположно по направлению реакции R 1IJi (т. e.
действует снизу вверх).
Э л е м е н т ЯlJD (рис. 2.39, д)
Ввиду симметрии нагрузки реакции Яш% и R D равны
собой:
Г) —
_ Ад
P —
_$2аА
АЯ/3
^~2 ~ •
между
Давление Уш на основной элемент ШгШ2 в шарнире Ш 2 по чис­
ловой величине равно реакции Ruj^ Н0 направлено в обратную
сторону, т. e. вниз.
Э л е м е н т ШгШг (рис. 2.39, г)
Кроме нагрузок Р 2 и qx к элементу ШУШ2 необходимо прило­
жить у концов консолей ранеенайденныедавления Vuix и Уш^
Реакцию R B найдем из уравнения
/2
У , Мс = R Bl 2 — Р 2 (а2+ 12) + УШх(а2 + 12) — qx^ - + Уш а3= 0,
откуда
1\
R B=
56
(Р2-- K/Z/J(^2+ / 2) + ^ l 2
■
jr
Уш*аз
.
Аналогичным путем из уравнения 2 ^ я — 0 нах°Аим
Rc'
Правильность определения реакций необходимо провер^хь
например, с помощью уравнения ^ Y = 0. Д ля данного случая
это уравнение имеет вид
^л + ^ я + ^ с + ^ я — Qih— Чъа\ — P i — P 2===0После определения опорных реакций можно перейти к пост­
роению эпюры изгибающих моментов.
Напомним, что на тех участках, к которым внешняя нагрузка
непосредственно не приложена, эпюра изгибающих моментов имеет
прямолинейное очертание.
Э л e м e н т АШг (рис. 2.39, в)
Под силой Pj и в шарнире Шг изгибающие моменты равны нулю;
в точке А момент М Л= —Р га. Этого достаточно для построения эпю­
ры моментов для элемента АШг (рис. 2.39, ё).
Э л e м e н т Ш2В (рис. 2.39, д)
В пределах элемента Ш2й эпюра моментов ограничена квадрат­
ной параболой с максимальной ординатой
iмr i i m a x
= ^§
в середине элемента и нулевыми ординатами на концах.
Э л е м е н т ШгШ2 (рис. 2.39, г)
Изгибающие моменты над опорами В и С равны
M в — (1 4 —P 2) а2 и м с = —Уш2азМомент М в может быть положительным или отрицательным в за­
висимости от знака разности Vm,—P ^
Построив по значениям М в и М с эпюру моментов в пределах
консолей элемента ШгШ29 проведем линию, соединяющую опорные
моменты (пунктир на рис. 2.39, e), и построим на ней параболу,
представляющую эпюру моментов в свободно лежащей однопролет­
ной балке от сплошной нагрузки q±. Наибольшая ордината этой
параболы равна
м 2 max
4lt»
3 •
В середине пролета ВС эпюра моментов может быть положитель­
ной или отрицательной в зависимости от соотношения моментов
Мв, A4c ^ ^ 2 tn a x *
Поперечная сила Q вычисляется как сумма проекций на верти­
кальную ось всех сил, расположенных по одну сторону от данного
сечения*.
1
Если проекция равнодействующей внешних сил на нормаль к оси бруса
направлена вверх (или правых сил — вниз), то поперечная сила считается поло­
жительной.
57
Заметим, что найденные в каждом шарнире равные и противо­
положные силы Яд/ и Vui в суммевсегда дают нуль, а потому нали­
чие в балке шарнира не вызывает скачка в эпюре Q. В рассматривае­
мом примере скачок в шарнире Шг вызван тем, что там приложена
сосредоточенная сила Р 2Передвигаясь слева направо и суммируя последовательно внеш­
ние нагрузки и реакции, получим эпюру поперечных сил, изобра­
женную на рис. 2.39, ж.
Подобным же образом (расчленением на однопролетные простые
балки) может быть рассчитана любая многопролетная шарнирная
статически определимая балка.
Между эпюрами M и Q существует определенная зависимость.
Поперечная сила является первой производной от изгибающего
момента по длине балки:
О ^Л
4
d* ’
следовательно, она равна тангенсу угла наклона, составляемого ка­
сательной к эпюре M с осью балки (теорема Д. И. Журавского) \
Если эпюра моментов построена со стороны растянутого волок­
на, т. e. положительные моменты отложены вниз, то участкам с вос­
ходящими (слева направо) ординатами эпюры M соответствуют
участки с отрицательными Q, а участкам с нисходящими ординатами
эпюры M — участки с по­
ложительными Q. Чем кру­
че касательная к эпюре
моментов, тем больше аб­
солютное значение Q. В тех
сечениях, где поперечная
сила равна нулю, изгибаю­
щий момент имеет шах или
min.
Между сосредоточенны­
ми силами (если между ни­
Рис. 2.40
ми отсутствует сплошная
нагрузка) эпюра M ограничена прямой (в общем случае наклон­
ной) линией, а эпюра Q — прямой горизонтальной линией. На
тех участках, где приложена рав­
номерно распределенная нагрузка,
эпюра M ограничена параболой
(второй степени), а эпюра Q — на­
клонной прямой.
Рис. 2.41
Точкам приложения сосредото­
ченных сил соответствуют пере­
ломы в эпюре M и скачки в эпюре Q. Если сила направлена вниз,
то и скачок в эпюре Q должен быть вниз (при перемещении слева
1
Эта теорема была доказана Д. И. Журавским. См. статью H. А. Белелюбского в «Известиях Института инженеров путей сообщения», выпуск LII*
58
направо); если сила направлена вверх, то и скачок должен быть
вверх.
На рис. 2.40 показаны схемы нескольких статически неопредели­
мых неразрезных балок. Читателю предлагается дать несколько
вариантов установки шарниров в каждой балке для получения ста­
тически определимых неизменяемых систем. Читателю предлагается
Рис. 2.42
также рассчитать балку, изображенную на рис. 2.41 (построить для
нее эпюры M и Q), и определить, при какой длине консолей 1Х мо­
менты в серединах трех средних пролетов балки, изображенной на
рис. 2.42, будут равны друг другу.
§ 2.9. ЛИНИИ ВЛИЯНИЯ УСИЛИЙ ДЛЯ МНОГОПРОЛЕТНЫХ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ БАЛОК
Доказанное в § 2.4 положение о прямолинейности линии влия­
ния между узлами (при узловой передаче нагрузки) можно распро­
странить и на многопролетные статически определимые балки. Рас­
смотрим ряд конкретных примеров.
Пусть требуется построить линии влияния опорных реакций R Ay
R B и R c для балки АС, изображен­
ной на рис. 2.43, а.
Элемент CD этой балки одним
концом опирается на подвижную
опору С, а другим шарнирно свя­
зан с концом D консольной балки
AD Когда груз находится на бал­
ке CD, его давление распределя­
ется между точками D и С так же,
как для простой балки с пролетом
/2. При расположении же груза на
консольной балке AD в точки D и С
давление не передается. Поэтому
линия влияния реакции С будет
иметь вид, изображенный на рис.
2.43, в.
Построим теперь линию влия­
Рис. 2.43
ния опорной реакции R A. Заме­
тим, что пока груз P = 1 движется по балке A D y линия влияния реак­
ции R A строится так, как это было показано для консольной балки.
Когда груз P = 1 находится в точке D, опорная реакция направлена
вниз и достигает своего наибольшего отрицательного значения. При
движении груза P = 1 по балке DC в шарнир D будет передаваться
59
давление \-хИ 2у т. e. такое же, какое передавалось бы в этот шарнир
при узловой передаче нагрузки на участке DC (рис. 2.43, б). Следо­
вательно, линия влияния R A на участке DC представляет собой
как бы передаточную прямую.
Рис. 2.44
Линия влияния опорной реакции R A дана на рис. 2.43, г. На
рис. 2.43, д показана линия влияния опорной реакции R B.
Рассмотрим построение линий Елияния поперечной силы для
сечений I и II системы, изображенной на рис. 2.44, а.
Рис. 2.45
Поперечная сила в сечении I получается отличной от нуля лишь
в том случае, когда груз P= 1 располагается между узлами 1 и 3.
Если груз P = 1 расположен над узлом 2Уто он полностью переда­
ется на консоль балки и поперечная сила в сечении I равна — 1.
При передвижении груза влево или вправо давление, передаваемое
60
на узел 2, будет убывать и, наконец, при расположении груза в точ­
ках 1 и 3 обратится в нуль. Так как давление, передаваемое в точку
2, меняется прямо пропорционально расстоянию груза от точки 1
или 3, то соответствующая линия влияния представится в виде
треугольника с ординатой под сечением /, равной —1 (рис. 2.44, б).
Рис. 2.46
Поперечная сила в сечении II, когда груз P = 1 расположен на
участке 2—5 или 6—10, будет такой же, как и при непосредственной
передаче нагрузки, В соответствии с этим на рис. 2.44, в проведены
наклонные линии асх и с2Ь, отсекающие на опорных вертикалях сов­
падающих с реакциями R A и R B отрезки, равныеединице. На участке
5—6 линия влиянияДолжна быть также прямой. Ее узловые орди­
наты /г5 и hg уже получены в результате предыдущего построения;
остается провести передаточную прямую с^сг, соединяющую вер- •
шины полученных ординат. Переходя к крайним вспомогательным
балочкам 1— 2 и 10—11, заметим, что когда груз P = 1 стоит в точках
2 или 10, его влияние на искомую поперечную силу определяется
ординатой h 2 или ft10.
При расположении груза в точках 1 или 11 давление целиком
передается на фундамент, а на балку вовсе не действует. Следова­
тельно, здесь ординаты искомой линии влияния обращаются в нуль.
61
Так как любое усиЛйе при движении нагрузки между соседними
узлами меняется по закону прямой, соединяющей концы ординат
под этими узлами, то на участках 1—2 и 10— 11 для получения ли­
нии влияния Qn необходимо соединить прямыми нулевую точку
Рис. 2.47
под узлом 1 с вершиной а ординаты h 2 и вершину b ординаты h ^
с нулевой точкой b' (рис. 2.44, в).
Читателю предлагается проверить правильность построения
линий влияния, изображенных на рис. 2.45, 2.46 и 2.47.
§ 2.10. ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ
БАЛКАХ С ЛОМАНЫМИ ОСЯМИ ОТ НЕПОДВИЖНОЙ НАГРУЗКИ
Определение опорных реакций для балок с ломаными осями,
вычисление внутренних усилий в поперечных сечениях таких балок
и построение эпюр Q, N и M производится аналогично тому, как
это делается для прямолинейных балок. При этом используются
формулы, правила знаков и зависимости, приведенные в § 2.1. При
наличии в ломаной балке вертикальных элементов следует усло­
виться, какой конец каждого такого элемента будет считаться ле­
вым, и отметить соответствующий конец на чертеже каким-либо
значком (например, крестиком).
Ниже приводятся примеры построения эпюр Q, N и M для балок
с ломаными осями.
Пример 1. Построим эпюры Q, N и M для балки, изображенной на рис. 2.48, а.
Условимся нижнюю часть вертикального элемента балки считать левой частью
и в соответствии с этим нижний конец его отметим крестиком.
62
Балка имеет два участка. Для каждогоиз них с помощью формул (2.1) —
(2.3) составляем выражения поперечных и продольных сил и изгибающих мо­
ментов.
У ч а с т о к I.
В поперечном сечении вертикального элемента А В У отстоящем на расстоя­
нии *i от его верхнего конца, действуют уси­
лия:
Q > = -S Y = -P ;
пр
M = - 2 * = 0;
пр
MI = - 2 м = — (-p*i) = Р ч
np
У ч а с т о к II.
В сечении горизонтального элемента ВС,
отстоящем на расстоянии х2 от его левого кон­
ца, действуют усилия:
Qii = 2 ^ = 0: M i = 2 * = ^ ;
лев
лев
MU = 2 l M = - P a .
лев
Построенные по полученным выражениям
эпюры Q, N и M изображены на рис. 2.48, б—г.
Следует обратить внимание на то, что по­
лученные выражения М\ и Q1 не удовлетворя­
ют зависимости (2.1) § 2.1 (теореме Журавско­
го). В самом деле,
dMi _ d(P*x)
dxi
сШ1
d*i
dxi
_
f
^ т
а не ^ 3— = Q1, как это должно быть на основании теоремы Журавского. Такое положение
является результатом того, что для первого
участка балки положительным для оси x при­
нято направление справа налево, в то время как
зависимость n
Q =Ш
^ - верна при направлении оси
x слева направо.
Проверим рявновесие узла В. Для этого
выделим его из балки и приложим к нему
внутренние усилия, возникающие в попереч­
ных сечениях вертикального и горизонтального
Рис. 2.48
элементов около узла В (рис. 2.48, д). Составнм уравнения узла В:
2 M B = — MBA + M BC = — Pa + Pa = 0;
2 ^ = 0; 2 ^ = -QB4 + ^BC = - P + P = 0.
Таким образом, условия равновесия удовлетворяются.
Условия равновесия должны удовлетворяться при любом числе стержней,
сходящихся в рассматриваемом узле. Если к узлу приложены внешние силы
И моменты, то их также следует учитывать при рассмотрении равновесия узла.
Пример 2. Построить эпюры Q, N и M для балки, изображенной на
рис. 2.49, а.
•
Наклонную силу P можно заменить ее горизонтальной составляющей Рх
и вертикальной составляющей Ру:
Рх —Py = P cos 45° —0,707 Р.
63
Из опорных реакций R Al Vs и Нв Для построения эпюр достаточно опре­
делить реакцию # д :
2A fB = ^-2/+ P yl,707/+ P *.0,707/ = 0,
откуда
Ra =
- ( I . 7 0 7 P , + 0 . 7 0 7 W _ - 1 .7 0 7 - 0 .7 0 7 „ ^
= _
^
Зиак минус указывает иа то, что
реакция R A направлена не вверх (как
это предполагалось), а вниз.
Для каждого из трех участков
балки составляем выражения попереч­
ных и продольных сил и изгибающих
момеитов.
У ч а с т о к I.
Qi =: R A — —0,853P; N\ = 0;
Afi ^ R Ax i = —0,853P^i;
при Xi — 0 A1I = 0; при *i = 21
All = —1,706P/.
У ч а с т о к II.
QH = Py ~ 0,707P;
ЛП1 = — Рх — —0,707P;
МП = — Рх .0,7071— Ру (1,707/—х2) —
= —0,707P (0,707/+ 1,707/ —лг2) =
= —Я (1,707/—0,707jc*);
при x2= 0 MH = -l,7 0 7 P /; при
x, = l Л111——P/У ч а с т о к III.
Рис. 2.49
Qiu = P; Л ^ т = 0 ; Aim = —Ях3;
при лгэ = 0 AJin = 0; при j*з=1 M111——P/.
Построенные по полученным данным эпюры Q, N и M изображены на
рис. 2.49, б—г.
Читателю предлагается:
1) проверить знаки эпюр поперечиых сил, построенных на рис. 2.48 и
2.49, используя правило, изложениое в § 2.1;
2) проверить эпюры Q, N и M , приведенные на рис. 2.50;
3) построить эпюры Q, N и M для балок, изображенных на рис. 2.51.
§ 2.11. ПОСТРОЕНИЕ ЛИНИЙ ВЛИЯНИЯ В БАЛКАХ
КИНЕМАТИЧЕСКИМ МЕТОДОМ
Построение линий влияния кинематическим методом основано
на использовании принципа возможных перемещений, изучаемого
в курсе теоретической механики. Напомним его формулировку:
если система находится e равновесии, то сумма работ всех сил на
любых возможных перемещениях равна нулю. Возможные перемеще­
ния — бесконечно малые перемещения, допускаемые связями. Воз­
можные перемещения направлены по касательной к действительной
траектории (рис. 2.52).
Рассмотрим балку, изображенную на рис. 2.53, а, и построим
для нее линию влияния опорной реакции R B. Для построения этой
линии влияния отбросим связь, соответствующую реакции R B, и
64
Рис. 2.50
Рис. 2.51
65
обозначим усилие в этой связи через X (рис. 2.52, б). Так как балка
является системой статически определимой, то после отбрасывания
одной связи она превратится в механизм с одной степенью свободы.
Зададим этому механизму возможное перемещение, показанное на
рис. 2.53, б. Это возможное перемещение определяется одним пара­
метром, так как получаемый
после отбрасывания связи ме­
ханизм имеет одну степень сво­
боды. Будем задавать возмож­
ное перемещение таким обра­
зом, чтобы сила X соверша­
ла положительную работу (пе­
ремещение Д* совпадает с на­
правлением силы X).
Рис. 2.52
Рис. 2.53
В соответствии с принципом возможных перемещений имеем
b A ,+ X A * = 0 ,
(2.1-5)
Х = ~ Т ах
~-
(216)
откуда
В числителе формулы для определения X стоит перемещение по
направлению силы Я = 1 , числовая величина которого зависит от
положения силы. Если сила пробегает всю балку, то Ар есть сово­
купность перемещений всех точек балки по вертикали, а следова­
тельно, изображенное на рис. 2.53, б возможное перемещение и есть
эпюра Ар. Эта эпюра имеет знак минус, так как перемещения про­
исходят навстречу силе Я. Разделив все ординаты этой эпюры на Ах
и изменив знак на противоположный в соответствии с формулой
(2.16), получим линию влияния, изображенную на рис. 2.53,e.
После изменения знака ординаты линии влияния откладываются
в ту же сторону, что и ординаты эпюры Др, так как положительные
ординаты линии влияния откладываются вверх. Обратим внимание
на то, что в месте приложения силы X ордината линии влияния
G6
равна единице, так как в этом случае [см. формулу (2.16)b
A ,= -A * Итак, для построения линии влияния кинематическим методом
необходимо:
1. Отбросить связь, линию влияния усилия в которой необхо­
димо построить, заменив ее действие силой X .
2. Задать полученному механизму возможное перемещение та­
ким образом, чтобы сила X совершала положительную работу, в ре­
зультате чего получим эпюру
возможных перемещений Др.
3. Деля все ординаты эпюры
Др на Дх, получим линию влия­
ния искомого усилия. При этом
ординаты линии влияния откла­
дываются в ту же сторону, что и
эпюра Др, но знаки меняются на
пр отивоположные.
В соответствии с этими пунк­
тами на рис. 2.53, г, д построе­
ны эпюра Др и линия влияния
опорной реакции R A.
Рассмотрим далее консоль­
ную балку, изображенную на
рис, 2.54, а. Построим вэтой бал­
ке линию влияния опорной реак­
ции R A. Заделка препятствует
трем перемещениям — повороту,
горизонтальному и вертикаль­
ному перемещениям. Необходи­
Рис. 2.54
мо устранить связь, соответ­
ствующую вертикальному пере­
мещению, и сохранить остальные связи. Поэтому в отличие от пре­
дыдущей задачи необходимо схематизировать жесткое закрепление
так, как это показано* на рис. 2.54, б. Горизонтальные стержни
препятствуют повороту и горизонтальному перемещению, а вер­
тикальный — вертикальному перемещению. Отбрасывая вертикаль­
ную связь, получим механизм с одной степенью свободы, далее, в со­
ответствии с приведенными пунктами, построим линию влияния R Af
изображенную на рис. 2.54, г.
Для построения линии влияния момента врежем в точке А шар­
нир и моментную связь заменим моментом X. Отличием данной за­
дачи является то, что перемещение Дх является углом поворота.
Поступая аналогично предыдущему, построим линию влияния мо­
мента, изображенную на рис. 2.54, e. Обратим внимание нато, что
если в формуле (2.16) положить A *=li то X = —Др. Таким обра­
зом, линия влияния совпадает с эпюрой возможных перемещений,
если задать возможное перемещение так, что A*=1, при этом силу
67
X надо направить так> чтобы она совершала положительную рабо­
ту, при этом эпюра Др и линия влияния будут отложены в одну
сторону.
Далее рассмотрим процесс построения линий влияния внутрен­
них сил. На рис. 2.55, а изображена многошарнирная балка, тре­
буется построить линии влияния поперечной силы и момента в се­
чении I —/. Для построения
линии влияния поперечной
силы используем схему, изоб­
раженную на рис. 2.55, б. Пос­
ле отбрасывания связи, со­
ответствующей поперечной си­
ле, приложим искомые силы X
таким образом, чтобы они
совпадали с положительным
направлением поперечных сил
(см. § 2.1). Отличие в по­
строении линий влияния внут­
ренних сил от линий влияния
опорных реакций состоит в
том, что необходимо прикла­
дывать не одну силу, а две.
Одна из сил представляет дей­
ствие правой части балки на
левую, а другая — наоборот.
В данном случае перемещение
по направлению левой силы X
равно нулю. Зададим единич­
ное возможное перемещение
Рис. 2.55
по направлению силы Х (Д *=
fc= 1) так, чтобы работа силы X была положительна (рис. 2.55, б).
Полученная таким образом эпюра Дг, совпадает с линией влияния
(рис. 2.55, б). Аналогично строится и линия влияния момента
(рис. 2.55, г, 5).
Построим для балки, показанной рис. 2.56, а, линию влияния
поперечнойсилыС!.!. Отбрасывая связь, соответствующую попе­
речной силе, приложим силы X в соответствии с положительным
направлением поперечной силы. Зададим полученному механизму
возможное перемещение. В отличие от примера, приведенного на
рис. 2.55, б, в данном случае происходит перемещение как по на­
правлению левой силы (Д*), так и по направлению правой (Д*) и
суммарное перемещение Дх=Д *+Д "долж но быть равным единице.
Для построения линии влияния в этом случае используем вспомо­
гательный прием. Разобьем балку на три диска /, / / , I I I и введем
диск земли IV. Цифрами на рис. 2.56, б обозначены полюса вра­
щения одного диска относительно другого. Обратим внимание на
то, что точка (t, /) должна одновременно принадлежать и i-му диску
и/-м у. Временно возьмем в качестве неподвижного диск I и совмес­
тим его с горизонталью (рис. 2.56, в). Диск I I должен перемещаться
68
параллельно диску /, что соответствует связям, следойательно, он
должен занимать горизонтальное положение и отстоять от диска /
на единицу. На диске I находится полюс (1.4), а на диске I I — по­
люс (2.4), следовательно,
для диска I V известно по­
ложение двух его точек.
Соединяя эти точки, полу­
чим положение диска IV.
Далее находим положение
диска I I I [прямая, соеди­
няющая полюса (2.3) и
(3.4)]. Откладывая ордина­
ты, показанные на рис. 2.56,
в от горизонтали, получим
линию влияния Qi- ь Вы­
числим ее характерные ор­
динаты. В соответствии с
рис. 2.56, в, имеем
* ё а = зТВычислим oa, ob и ос
(рис. 2.56, г):
oa = d tg а = у ;
ofиc=l1 _ _1 = _2 .
tg R - £L. _ __?___ _L •
1& |J
2d
3.2d
3d*
OC= d tgP = i .
Аналогично строится и
линия влияния момента
для сечения I— I (рис.
2.56, д — ж). Обратим вни­
мание на то, что при ис­
Рис. 2.56
пользовании кинематичес­
кого метода линии влияния внутренних сил строятся непосредст­
венно, минуя построение линий влияния опорных реакций.
Гла вa 3
ТРЕХШАРНИРНЫЕ АРКИ И РАМЫ
§ 3.1. ПОНЯТИЕ ОБ АРКЕ И СРАВНЕНИЕ ЕЕ С БАЛКОЙ
Впервые арочиая система для перекрытия большого пролета была предложена
известным русским механиком И. П. Кулибиным в 1776 г., т. e. почти за 100 лет
до создания строительной механики как науки, который, используя законы общей
механики, дал расчет и разработал проект однопролетного арочного деревянного
моста .пролетом 300 м 4 qpe3 р. Децу в С.-Петербурге. Для определения очертания
оси арки Кулибин экспериментально разработал теорию веревочного многоугольиика, вошедшего в курс механики значительно позже. Таким образом, он первым
установил закон взаимодействия сил в трехшарнирной статически определимой
системе.
Огромная, в 30 м, модель моста Кулибина была испытана под нагрузкой
3500 пудов Российской Академией наук и одобрена.
Великий математик того времени академик Российской Академии наук Эйлер
проверил все чертежи трехсотметрового моста и математические выкладки Ку­
либина и признал их совершеино правильными (см. статью Эйлера «Легкое пра­
вило, каким образом из модели деревянного моста или подобной другой машины,
которйя тяжесть нести должна^пезнавать, можно ли то же сделать в большем, чем
в модели, виде», опубликованнуюв«Месяцеслове с наставлениями на 1776 год»).
Чтобы оценить роль Кулибина в мостостроении XVIII в., следует указать на
то, что самьгй длинный деревянаый мост длиной 119 м был построен братьями
Грубермаи в аббатстве Веттииген лишь в 1778 г.
Ценность проекта Кулибина заключалась в том, что им была создана новая
конструкция моста, разработаны методы и приборы для экспериментального ис­
следования мостового сооружения, дана теорня испытания моста на модели. Одиако мост не был построен вследствие косности правящнх кругов того времени.
Значительно равее заграиичных ученых И. П. Кулибин начал работать над
проектом стального моста. В 1814 г. он сконструировал трехарочный металличе­
ский мост, модель которого сохранилась.
И. П. Кулибин известен также многими другими изобретениями в области
точной механики.
Арочными называются системы криволинейного или ломаного
очертания, в опорах которых от вертикальной нагрузки возникают
наклонные реакции, направленные, как правило, внутрь пролета.
Горизонтальная составляющая такой наклонной реакци-и назы­
вается распором.
Покажем, что арочные системы в сравнении с балочными оказы­
ваются экономически более выгодными. Для этого рассмотрим балку
прямоугольного сечения шириной b и высотой h с кривой осью, ле­
жащую на двух шарнирных опорах (из которых одна подвижная) и
находящуюся под действием вертикальной равномерно распреде­
ленной нагрузки интенсивностью q (рис. З Л ,я).
Изгибающий момент M k в сечении k (с координатами x и у)
70
равен
M k = Vax — q ^ t
где
Va = qlj2,
и, следовательно,
м к= Ц -{1-х).
Для определения продольной силы N k в сечении k спроеци­
руем все силы, расположенные левее сечения k, на касательную
uu, проведенную к оси бруса
в точке k (рис. 3.1, а):
N k = Va sin <pk— qx sin ф* =
= (Va— qx) sin <pk = Q l sin cp*,
где Ql — поперечная сила в
сечении k (абсцисса которого
x) балки с горизонтальной
осью.
Под действием изгибающе­
го момента М к и продоль­
ной силы N k в крайних во­
локнах сечения k возникнут
нормальныенапряжения, оп­
ределяемые по формуле1
o = * L + J*l
F
—
W
’
где F — площадь поперечного
сечения балки, равная bh\
Рис. 3.1
W — момент сопротивления
его, равный Ь№/6.
Подставив в выражение для о значения продольной силы N k,
изгибающего момента М к9 а также F и W , получим
Qk sxn ф*
.9*ff_rr*)3.
° = ------Ш— ±
bh*
•
Выясним, как изменяются нормальные напряжения в сечении
k , если на подвижной опоре приложить горизонтальную силу
tf, направленную внутрь пролета (рис. 3.1, б). Изгибающий мо­
мент при этом уменьшится на величину Н у и станет равным5?
M k = q x ^ - — Hy,
где у — ордината сечения k.
1 Сжимающую продольную силу считаем положительиой, иапряжения сжа­
тия— положительными, а растяжения— отрицательными.
2 Предполагается, что сила H не настолько велика, чтобы вызвать измене­
ние знака изгибающего момента M k.
71
Числовая величина продольной силы увеличится на H соэф*и
станет равной
N k = Ql sin ф* + H cos ф*.
Таким образом, нормальные напряжения в сечении, с одной
стороны, увеличатся вследствие увеличения продольной силы, а
с другой — уменьшатся в результате уменьшения изгибающего
момента.
Первый член формулы нормальных напряжений увеличится на
H cos ф£ _ H cos ф£
F
bh
’
а второй уменьшится на
Ну
W “
6Ну
bh2 *
Так как отношение величин
6Ну в H cosyfe
bh2 ’
bh
6у
h cos ф£
для наиболее напряженных участков в средней части балки значи­
тельно больше единицы, то общее нормальное напряжение при
этом довольно сильно уменьшится. Например, при y = 3 м, h = 1 м
и созф* = 0,9 это отношение окажется равным
fy
_ 6*3 _ ЛЛ
h cos9* "
1-0,9
™'
Если при этом первое слагаемое N k/F формулы нормальных
напряжений o = ^ + ^
увеличится, допустим, на 100Н/см2,т о
второе слагаемое M kjW той же формулы уменьшится на 2000 Н/см2;
следовательно, общее нормальное напряжение в сечении снизится
на 1900 Н/см2. Поэтому
можно считать, что гори­
зонтальная сила H значи­
тельно улучшает условия
работы балки с криволи­
нейной осью.
Вертикальная нагрузка,
действующая сверху вниз
на криволинейную балку,
вызывает перемещение под­
Рис. 3.2
вижной опоры (см. рис.
3.1, а) влево; приложенная к той же опоре сила H перемещает ее
вправо.
Числовую величину силы H можно подобрать так, чтобы левый
конец балки, переместившийся влево от нагрузки, вновь вернулся
на свое прежнее место. В этом случае силу H можно рассматривать
как горизонтальную реакцию неподвижной опоры; следовательно,
левый конец балки будет находиться в условиях, вполне анало­
72
гичных тем, в которых находится правый конец баЛки, опираю­
щийся на неподвижную опору.
Сооружение с кривой осью, опирающееся на две неподвижные
шарнирные опоры (рис. 3.2), носит название двухшарнирной арки.
В опорах такой системы помимо реакций, действующих вертикаль­
но, возникают горизонталь­
ные реакции. Число опор­
ных стержней в двухшар­
нирной арке равно четырем,
а потому она является сис­
темой статически неопреде­
лимой. Переход к арке ста­
тически определимой, ко­
Рис. 3.3
торая нас • преимуществен­
но интересует в настоящей
главе, выполняется постановкой в промежуточном сечении двух­
шарнирной арки третьего шарнира (рис. 3.3). В этом случае шарнир
с прикреплен к земле с помощью двух стержней — дисков арки, что
доказывает ее статическую определимость и одновременно геомет­
рическую неизменяемость. Приведенное выше доказательство эко­
номичности двухшарнирной арки (по сравнению с балкой) может
быть распространено и на трехшарнирную арку. В ряде случаев
применение трехшарнирных арок является более целесообразным,
нежели двухшарнирных, так как в статически неопределимых сис­
темах могут при осадке опор и при изменениях температуры возни­
кать дополнительные напряжения, что не имеет места в статически
определимых системах.
§ 3.2. АНАЛИТИЧЕСКИЙ РАСЧЕТ ТРЕХШАРНИРНОЙ АРКИ
1. Определение опорных реакций
Трехшарнирная арка является системой геометрически неизме­
няемой и статически определимой.
В практике встречаются различные по форме и виду арки. В том
случае, когда каждая половина трехшарнирной арки представляет
собой сплошной брус криволинейного очертания, ее называют аркой
с
Рис. 3.4
Рис. 3.5
со сплошной стенкой (рис. 3.3). При ломаном очертании оси соору­
жение обычно называется трехшарнирной рамой (рис. 3.4, а, б).
73
В практике встречаются арки, образованные из двух ферм, со­
единенных между собой общим шарниром с. Такие системы носят
название трехшарнирных ферм (рис. 3.5).
Система, изображенная на рис. 3.6, носит название трехшарнир­
ной арки с затяжкой.
При действии внешней нагрузки на трехшарнирную арку
(рис. 3.7, а)в каждой ее опоре возникает по две реакции; всего,
таким образом, имеется четыре
неизвестные реакции. Вертикаль­
ные реакции обозначим через Va
и Vb> а горизонтальные— через
Н а И Н ь (рис. 3.7, б).
Кроме трех уравнений равно­
Рис. з.е
весия, которые дает статика для
системы сил, расположенных в одной плоскости, для расчета трех­
шарнирной арки можно составить четвертое уравнение, основанное
на том, что равнодействующая всех сил, приложенных к левой
(а также и к правой) половине арки, должна пройти через средний
шарнир с, так как в противном случае левая (или правая) половина
арки вращалась бы вокруг точки с. Так как момент равнодействую­
щей равен алгебраической сумме моментов составляющих ее сил,
Рис. 3.7
то четвертое уравнение статики можно сформулировать следующим
образом: алгебраическая сумма моментов сил действующих на ле­
вую или правую половину арки относительно точки с (среднего шар­
нирег), равняется нулю, т. e.
,
или
2
МС
^У1лев. сил = 0
ui
2
М
1 У1°пр.
0
С И Л=-- и *
Таким образом, при расчете трехшарнирной арки можно со­
ставить следующие четыре уравнения:
2*=o
(все силы, действующие на арку, проецируются на ось х)\
%Y=0
(то же, на ось у)\
2A I = 0
74
(зл)
(3.2)
(3.3>
(составляется сумма моментов всех сил, действующих на арку,
относительно произвольной точки; удобно в качестве такой точки
принимать точку а или b);
2
М Сг ъ . сил = v0
1У1л
\I
МС
I
JI
или
2
^ n p .
СИЛ
= 0V *
(3.4)
Пример 1. Определить опорные реакции для арки, изображенной на
рис. 3.8, а.
Р е ш е н и е . Отбросим опоры и заменим их реакциями Va , На и Vb> Нь
(рис. 3.8, б). Для определения опор­
ной реакции Va составим выражение
суммы моментов всех сил, действую­
щих на арку, относительно точки b:
2M ft = l V - P x ( f - a d —Рг (1—а2) =0,
откуда
t, _ Pi(?—ai) + P 2 (^—#г) _ Мь
Vaj
1
.
где Мь—момент внешней активнок
иагрузки относительно правого опор­
ного шарнира.
Для определения правой верти­
кальной реакции Vb составим выра­
жение суммы моментов всех сил отно­
сительно точки а:
2 Ма= - V b l + P*a. + Pifli = 0,
откуда
Vb
PiQi + P&i __ м а
1
1
где М в—момент внешней активной
нагрузки относительно левого опориого шарнира.
Полученные для Va и Vb формулы
пок-азывают, что при действии на арку
вертикальной нагрузки вертикальные составляющие опорных реакций соответ­
ственно равны опорным реакциям простой двухопорной балки с пролетом, рав­
ным пролету арки (рис. 3.8, в).
Подставив значения величин, входящих в формулы для Va и Vb> получим:
4 (10 — 3)4-3 (10 — 6) 2 8 + 1 2
= 4 кН;
Va =
10
УЬ = Щ
10
™
= 3 кН.
Составим выражение суммы проекций всех сил на ось x:
2 х = я а- я ь=0,
откуда
На = н ь^ н .
Из этого равенства заключаем, что распоры, возникающие на опорах при
действни на арку вертикальной нагрузки, равны между собой.
Для определения числовой величины распора H приравниваем нулю сумму
моментов всех сил, действующих на левую часть арки, относительно шариира с:
2 > л е в .с и л — Va^1
Hf
P(( i
ах) —0,
откуда
Vah-Pi (h-ai)
Mc
f
f
где Mc — момент всех сил (за исключением силы tf), действующих на левую
(или правую) часть арки относительно шарнира с, численно рзвный изгибаю­
щему моменту в сечении х ~ 1 \ двухопорной балки, изображенной на рис. 3.8, e.
Таким образом, распор арки равен изгибающему моменту в сечении с абс­
циссой * = ^ п р о с т о й двухопорной балки (с пролетом, равным пролету арки),
разделенному на стрелу подъема /.
Подставив значения величин,-входящих в формулу для tf, получим
_ 4*5 — 4 (5— 3) _
H
3 кН.
H=
Пример 2. Определить распор H арки, изображенной на рис. 3.9, от рав­
номерно распределенной по пролету
нагрузки интенсивностью q.
P e ш e н и e. Определим верти­
кальные опорные реакции из уравне­
ний статики:
2 м й = 0 и 2 ^ a = 0Применительно к данному случаю
эти уравнения имеют вид:
1
^ M b= V J - q l Y = 0;
Y ^ M a = - V b l + q l - = Q,
откуда
Va=Vb = q ^ .
Для определения распора H составим выражение суммы моментов сил,
действующих на левую половину арки, относительно шарнира с:
1 ^ m ^ n L
2
f
L
q 2 '4
откуда
t f =
qP
fi/ •
Пример 3. Определить опорные реакции от наклонной силы Р = 5кН , дей­
ствующей на арку, представленную на рис. ЗЛО, при co so c-0 ,6 и s in a = 0,8.
Р е ш е н и е . Раскладываем силу P на вертикальную и горизонтальную
составляющие:
Ру -5 * 0 ,8 = 4 кН; Р* = 5 .0 ,6 ^ 3 к Н .
Для определения вертикальной реакции Va составим сумму моментов всех
сил относительно точки b:
откуда
2;W> = V V 12-P Уy.9+ P ,.3 = 0,
Va =
76
9P,,-3P,
3 6 -9
27
12
12
12
2 ,2 5к Н .
Для определения вертикальной реакции V& составим сумму моментов всех
сил относительно точки а:
2
Мв =---- И*-12 + Р „ . 3 + Р , . 3 = 0,
откуда
..
3-4 + 3-3
21
Vb —----fj----==j2=
. _- „
•
Для определения горизонтальной реакции На составим выражение для
момента всех сил, действующих на левую половину арки, относительно шар­
нира с:
2
^ л е в . сил = ^ a * 6
Н а ' ^ — ? х *1
P y*3 = ^i
откуда
Ha =
2 , 2 5 * 6 - 3 . 1 —4.3
1,5
Знак минус указывает на то, что в данном случае сила На направлена
влево. Для определения Нь составим сумму проекций всех сил на горизонталь­
ную ось x:
% Х = Н Л + Р х - Н ь = 0,
откуда
Hb = — 0,375 4- 3 = 2,625 кН.
2. Определение внутренних усилий в арке
при произвольной нагрузке
Внутренними усилиями являются: изгибающий момент М у
поперечная сила Q и продольная сила N, действующие в попереч­
ных сечениях арки.
Изгибающий момент, действующий в сечении, равен алгебраиче­
ской сумме моментов всех внешних левых сил относительно центра
тяжести данного сечения или же сумме моментов правых сил, взя­
той с обратным знаком. Изгибающий момент считается положитель­
ным, если левые силы стремятся вращать арку относительно дан­
ного сечения по ходу часовой стрелки.
Определим изгибающий момент в произвольном сечении k (абс­
цисса которого равна x k) арки, изображенной на рис. 3.11:
^ k = ^a^ft
^ аУк
2 ^ y fak
^7*)
^ ' ^ x (Ук
Ур)>
77
где Р х и Р у — горизонтальная и вертикальнаясоставляющиесилР.
Под знаки сумм входят лишь силы P, приложенные левее сече­
ния k .
Поперечная сила, действующая в сечении, равна алгебраической
сумме проекций всех внешних левых сил (или правых сил с обрат.p
ным знаком) на нормаль к
I3
оси бруса в данном сечении.
f
/Рь
Поперечная сила считает­
ся положительной, если сум­
ма проекций левых сил на­
правлена вверх от оси арки.
Определим поперечную си­
лу в сечении k арки, изоб­
раженной на рис. 3.11. Для
этого спроецируем все силы,
Рис. 3.11
действующие левее сечения k ,
на ось n — n :
Qfc = Va cos ер*— Ha sin 9 f t - S ^ , cos Ф*— 2 p * s in Ф*Продольная сила, действующая в сечении, равна алгебраической
сумме проекций всех внешних сил (правых сил с обратным знаком)
на касательную к оси бруса в данном сечении. Продольную силу
считают положительной, если она в сечении арки вызывает сжатие.
Определим продольную силу в сечении k арки, изображенной
на рис. 3.11. Для этого спроецируем все силы, действующие левее
сечения k, на ось и — и:
N k = Va sin ф* + Ha cos щ + 2 p x cos Ф%— 2 p y sin Ф*Определив указанным способом значения M , Q и N для ряда
сечений, можно построить эпюры изгибающих моментов, поперечных
и продольных сил.
Пример. Для арки, изображенной на рис. 3.12, определить опорные реакции,
а также изгибающий момент, поперечную и продольную силы в сеченииАс абсцис­
сой Jc=//4. Арка очерчена по
ч_______
Р-ВкН
параболе, уравнение которой
тттшттпт
.cc=tt*
y=^-(l-x)x =
4*4 (12 — дг) x
(12 — x) x
ПМ2
”
9
P e ш e н и e. Определим ор­
динату сечения k:
(12 — 3)*3
■—3 м.
Ух= з ~
Q
“
Рис. 3.12
Продифференцировав уравнение параболы, определим таигеис угла наклоиа
к горизонту касательной, проведенной к оси арки в точке с абсциссой x:
, 12 — 2x
^Ефлг —У — Q •
78
Тангеис угла наклона касательиой в точке k с абсциссой x = 3 м равен
1 2 - 2 -3
2
g ф* — 9
—3‘
Для определения sin ф^ и cos ф£ воспользуемся формулами 1:
sin Ф* = -_ tg .{pfe - ■= -------^ = ^ = 0 , 5 5 5 ;
V \+ 'z \k
cos ф4 =
-
з
•
У'+т
^ — -= —
^l+tg*q>fc
,-=0,832.
Y '+т
Опорные реакции определятся из уравнений:
2 Щ — Ка *12 — ^»6*9—Р c o s a * 3 - P sin a-3 = 0,
откуда
Va —
2 .6 .9 + 1 2 .0 ,7 0 7 .3 _ _ 133, 45_, , 10Ш>
j2
— i2 — 11,1~ «М,
2 K = Ve—^ 6 - P s t a a + K 6=0,
откуда
Fft = 2-6 + 6-0,707— 11, 12 = 5 ,12 кН;
2 ^ л е в . сил = Кв - 6 — ^ - 6 - 3 — H а •4 = 0,
откуда
„
1 1 ,1 2 -6 - 2.18
30,72 _ „ Q „
На = — ------ -------- = — ~— = 7,68 кН;
% Х = Н а — Нь — Р c o sa = 0,
откуда
Ыъ = 7y6S— 6*0,707 = 3^8 кН.
Изгибающий момент в сечевии k .равен
Ж *= Ke -3—На -Ъ—<7-3“ = 11,12-3 — 7,68-3 — 2 ~ = 1 , 3 2 кН-м.
Поперечная сила в сечеьши k равна
Qk = V a cos фfe—fla sin фй — q-3 cos ф ^ = 11,12*0,832 — 7,68-0,555-6-0,832 = 0.
Продольная сила в сечении k равиа
N k = Vn sin ф* + Ял -со8 ф^ —^-ЗэШ у к =
= ll,12*0,555 + 7,68*0,832— 2*3*0,555 = 9,23 кН.
3. Определение внутренних усилий в арке
при вертикальной нагрузке
При действии на арку (рис. 3.13, а) только вертикальных сил
изгибающий момент в ее сечении с абсциссой x равен
M x = V a X - P t ( x - d t ) - P 2(х—а2)— . . . —Рт(х—ат)—Ну,
или
М ж= У а*—2 Я ( x - a ) - H y .
1
Значения sin ф^ и cos ф* можно определить и с помощью таблиц триго­
нометрических функций.
79
Под знак суммы входят только те силы P, которые приложены
левее рассматриваемого сечения; следовательно, выражение Vax—
—2 ^*(*—а) Равно изгибающему моменту М?с в простой двухопор­
ной балке (рис. 3.13, 6) в сечении с абсциссой x (такназываемому
балочному моменту). Та­
ким образом,
М х= М °— Ну.
Этой формулой удоб­
но пользоваться при по­
строении эпюры момен­
тов в арке, работающей
на вертикальную нагруз­
ку. Значения М°с непо­
средственно берутся из
эпюры моментов, постро­
енной для балки, изоб­
раженной на рис. 3.13, 6.
Распор находится пред­
варительно по формуле
H=M*/f.
Заметим, что приве­
денная формула для М х
наглядно показывает уменьшение изгибающего момента в арке по
сравнению с балкой, что подтверждает экономичность арочной
конструкции по сравнению с балочной.
Аналогичные формулы можно получить для Qx и N x . Для этой
цели спроецируем все приложенные слева силы сначала на нормаль
к оси арки, а затем на касательную к ней в сечении с абсциссой xi
Q x ^ ( V < x - ^ P ) cos ф X— H sin срж;
A ^ x = ( K a - 2 ^ ) sin Чх+Н cos 4>x-
В этих формулах под ^ P понимается сумма сил, приложенных
левее данного сечения. Величина (Va—^?Р), как нетрудно видеть
из рис. 3.13, бу представляет собой поперечную силу Ql в сечении
балки с той же абсциссой x . Поэтому формулы приобретают такой
вид:
Qx = Ql cos Ф*— H sin ф*;
N x = Ql sin ф* + H cos <рх.
Пример. В сечении k арки определить значения изгибающего момента M ^
поперечной силы Qk и продольной силы N^ от действия нагрузки, показанной
на рис. 3.14.
Арка очерчена по параболе, уравнеиие которой
4/
y = ^ - ( l - x ) x.
Пролет арки £ =12м; стрела подъема / = 4 м; абсцисса сечения k д^ = Зм.
80
P e ш e н и e. Определяем орди­
нату сечения k:
ф=2кн/и
i T T O i u f m
I
L 1 Iс
W = ^ - ( 1 2 - 3 ) 3 = 3M.
f " «
1
I
rf
р=ш
cf i a I
Определяем опорные реакции
Va и Vb:
S Mb = Val - ? L . ^-1 — ЗР■2a = 0,
где a = //8,
откуда
3 ,2 , 3Pl
,,
T ^ + T
^
r^
3
\v .
,,
Va--------- i------ —т~
8 <7^+
Рис. 3.14
t
%
+ Х Р = 4 - 2-12+ Т -4=12кН:
J j Y = V a + Vb- q ± - 3 P = 0,
откуда
^ ь = ? 42- +1З“'Р - К■аa =
~ ^ 42 - 3 - 4 - 1 2 = 1 2 к Н .
Распор H определяем из уравнения
2
<
ев. сил = Va J - Y
т “ H f =°’
■
откуда
1
Я
a 2
8
12-6
/
2 122
8
*
4
:9KH.
Изгибающий момент в сечении k определяем по формуле
Mk = Mk—Нуь,
где м \ определяем в свою очередь из выражения (как момент в простой балке):
M% = VaXk—Ц 4 p = 1 2 -3 — 2 ^ - = 3 6 — 9 = 27 кН-м.
Следовательно,
Af* = 2 7 - 9 - 3 = 0,
т. e. момент в сечении k равен нулю.
Поперечная сила равна
Q*=Qfe cos ф*— H sin щ ,
где
Ql = Va — qxk = 1 2 - 2 -3 = 6кН .
Тангенс угла наклона касательной в точке k к горизоиту определяем как
первую производную от у по x :
/ _ 4^ / /
о„ч
4 ‘4 />Л
«.л
12
2x
Используя таблицы тригонометрических функций, определяем по тангенсу
угла значения sin ф* и cos ф&:
sin ф* = 0,555; cos ф* = 0,832.
Следовательио,
Q* = 6*0,832-9.0,555 « 0.
Пользуясь формулой для продольной силы и подставив в нее соответст­
вующие числовые значения, получим
Nb = Qk sin ф * + Я cos ф£ = 6*0,555 + 9*0,832 x 10,81 кН.
§ 3.3. ГРАФИЧЕСКИЙ РАСЧЕТ ТРЕХШАРНИРИОЙ АРКИ.
МНОГОУГОЛЬНИК ДАВЛЕНИЯ
Кроме аналитических методов расчета арок существуют приемы
решения этой же задачи, основанные на графических построениях.
Рассмотрим случай действия на арку, изобр'аженную на
рис. 3.15, а, двух сил Р х и Р 2у приложенных соответственно к левой
и правой ее половинам. Определим сначала опорные реакции от
действия на арку силы Р\, В этом случае правая опорная реакция
Bi должна пройти через правый опорный шарнцр и шарнир с
фис. 3.15, а); в противном случае правая часть арки, на которую
Рис. 3.15
действуют две силы — опорная реакция Bi и реакция шарнира с,
не может находиться в равновесии. На левой опоре арки возникает
реакция At. Таким образом, вся арка в целом будет находиться
в равновесии под действием трех сил: A u Bi и Pi.
Из курса теоретической механики известно, что три действующие
на диск и находящиеся в равновесии силы обязательно пересекаются
в одной точке. Применив эту теорему к нашему случаю, легко опре­
делим направление опорной реакции Au а затем построением сило­
вого многоугольника для трех сил — P ^ А± и Bi (рис. 3.15, б) —
найдем величины опорных реакций Ai и Bi. Аналогично определим
реакции Л 2 и В 2, возникающие от силы Я 2>действующей на правую
полови н уарки (ри с. 3.15,a).
На основании принципа независимости действия сил, сложив
геометрически найденные силы А х и Л 2, Вх и В 2, получим реакции
А и В, возникающие на опорах трехшарнирной арки от сил Р х и
Р 2. Для этого из точки З силового многоугольника (рис. 3.15,6)
проводим прямую, параллельную линии действия реакции Л 2, и на
ней откладываем величину А 2. Соединив точку 0 с точкой 7, полу­
чим полную реакцию А левой опоры; аналогично производится
определение полной реакции В правой опоры.
Рассмотрим теперь построение так называемого многоугольника
давления, с помощью которого можно определить внутренние уси­
лия М, N и Q, возникающие в любом сечении арки.
Для этого построим веревочный многоугольник (рис. 3.15, e),
соответствующий силовому многоугольнику (рис. 3.15, б), с по­
мощью которого графически были найдены опорные реакции. Про­
должим левую опорную реакцию А (рис. 3.15,e) до пересечения
с силой Р х. Затем через точку их пересечения m проведем прямую
m — я, параллельную лучу I I силового многоугольника (луч / /
является линией действия равнодействующей сил А и Px). Далее
через точку n пересечения прямой m — rt и силы Р 2 проводим пря­
мую, параллельную лучу I I I , который является равнодействующей
сил Л, Р г и Р 2.
При правильном построении луч I I (прямая m — я), представ­
ляющий собой линию действия равнодействующей сил А и Р 1у
должен пройти через шарнир с, а луч I I I , совпадающий с линией
действия опорной реакции В, должен пройти через правый опор­
ный шарнир.
Так как каждый луч построенного таким образом веревочного
многоугольника / — / / — I I I (рис. 3.15, e) совпадает с линией давле­
ния, передаваемого с одной части арки на другую, то его называют
многоугольником давления.
Любая из сторон мцогоугольника давления совпадает с линией
действия равнодействующей всех левых (или правых) сил в арке.
В самом деле, левее сечения kx— kx (рис. 3.15, e) действует только
опорная реакция Л; следовательно, луч / веревочного многоуголь­
ника, совпадающий с направлением силы Л, и есть линия действия
равнодействующей левых сил для данного сечения. Левее же сече­
ния fz2— k 2 действуют реакция А и сила Р и равнодействующая ко­
торых проходит через точку их пересечения и совпадает с лучом I I
силового многоугольника. Слева от сечения k 3— к 3 арки действуют
силы A l9 Pi и Р 2у равнодействующая которых проходит через точку
пересечения луча I I с силой Р 2 (так как луч I I является линией
действия равнодействующих сил А и Ях) и совпадает с лучом / / / .
. Таким образом, действительно, любая из сторон многоугольника
давления amnb представляет собой линию действия равнодействую­
щей всех сил, расположенных левее (или правее) данного сечения.
Числовая величина этой равнодействующей в каждом сечении опре­
деляется с помощью силового многоугольника (рис. 3.15, б); на­
пример, равнодействующая сил А и Р х равна лучу / / , измерениому
в масштабе сил. Следовательно, с помощью силового многоуголь83
ника и многоугольника давления можно определить все внутренние
усилия в любом сечении арки. Так, например, изгибающий момент
может быть найден умножением равнодействующей (левых или пра­
вых сил) на ее плечо относительно центра тяжести данного сечения.
Изгибающий момент в сечении kx— ki равен
где 1 — плечо, т. e. длина перпендикуляра, опущенного из центра
тяжести данного сечения (рис. 3.15,e) на направление равнодей­
ствующей левых сил, в данном случае на направление опорной ре­
акции А.
‘Для определения продольной и поперечной сил, действующих
в сечении kx— k ly разложим равнодействующую левых сил (луч /),
т. e. реакцию А на две составляющие: 6—7, параллельную каса­
тельной к оси арки в этом сечении, и 0—6, нормальную к ней
(рис. 3.15, б). Составляющая 0— 6 даст поперечную силу Q в сече­
нии kx— kx арки, а составляющая 6— 1 — продольную силу N
в этом же сечении.
Линия давления дает наглядное представление о работе арки.
Так, из рис. 3.15, в видно, что правая половина арки, где равнодей­
ствующая для каждого сечения проходит ниже оси, изгибается вы­
пуклостью вверх, т. e. еще больше искривляется; в левой же половине, наоборот, выпуклость от
изгиба обращена книзу, т. e. про­
исходит распрямление оси арки.
B случае действия на арку
системы сосредоточенных сил Ри
ve P 2> P з и т. д. построение мноГ; гоугольника давления произвоH Jfr*
пв T
дится в следующем порядке:
1) находят равнодействую^ щую Я лев всех внешних актив­
ных сил (без опорных реакций),
действующих на левую полови­
ну арки;
2) находят равнодействую­
щую R np всех внешних актив­
ных сил (без опорных реакций),
Рис. 3.16
действующих на правую поло­
вину арки;
3) на основании принципа независимости действия сил опреде­
ляют указанным выше приемом опорные реакции А и В ;
4) строят силовой многоугольник и многоугольник давления.
Каждой нагрузке, действующей на данную трехшарнирную арку,
соответствует только один многоугольник давления. При действии
на арку сплошной нагрузки многоугольник давления превращается
в кривую давления.
Совершенно очевидно, что если арке дать очертание, при кото­
ром ее ось совпадает с многоугольником давления от заданной на84
грузки, то в такой арке не возникнут ни изгибаюш,ие моменты, ни
поперечные силы. В этом случае арка будет работать исключительно
на сжатие, что весьма выгодно, в особенности для каменных и бе­
тонных сооружений. Такое очертание оси арки называется рацио­
нальным Ч
С
Рис. 3.17
Отметим, что многоугольник давления может быть найден и
аналитически. Для этого необходимо определить величины M и
N и затем найти эксцентриситеты по формуле
e = M lN
Отложив от оси арки в ряде ее поперечных сечений отрезки,
равные эксцентриситетам, и соединив между собой концы этих
отрезков, получим искомый многоугольник давления.
Рис. 3.18
На рис. 3.16—3.18 показано графическое определение опорных
реакций, на рис. 3.19 — построение многоугольника давления и
на рис. 3.20 — определение внутренних сил в арке.
1 Экспериментальный методустановления рациональной оси арки впервые был
разработан известным русским изобретателем И. П. Кулибиным еще в 1776 г.
85
При действии на арку только вертикальных сил горизонтальная
составляющая любой из равнодействующих левых (или правых) сил
равняется распору Я (полюсному расстоянию) *. Поэтому, если
через какую-либо точку k оси арки (рис. 3.20, а) провести верти­
кальную прямую k — n до пересечения с многоугольником давле­
ния и здесь в точке n (рис. 3.21) разложить равнодействующую ле­
вых сил (в данном случае ^ п) на вертикальную и горизонтальную
составляющие, то изгибающий момент в сечении k будет равен про-
* i''if > '
Рис. 3.20
изведению распора H на вертикальный отрезок k — n (рис. 3.21)
между осью арки и стороной многоугольника давления, так как
вертикальная составляющая S дает относительно точки k момент,
* Любой луч (рис. 3.20, б) в силовом многоугольнике имеет одну и ту же гори­
зонтальную составляющую, равную распору tf.
86
равный нулю (рис. 3.21). Следовательно, при вертикальной нагруз­
ке все вертикальные отрезки, заключенные между многоугольником
давления и осью арки, являются ординатами эпюры моментов, из­
меренными в определенном, постоянном для всех сечений арки мас­
штабе. Построенная таким способом эпюра моментов для арки, изо­
браженной на рис. 3.20, а, приведена на рис. 3.22.
§ 3.4. УРАВНЕНИЕ РАЦИОНАЛЬНОЙ ОСИ ТРЕХШАРНИРНОЙ
АРКИ
Рациональным очертанием оси арки, как уже было указано,
называется такое ее очертание, при котором кривая давления от
заданной нагрузки совпадает с осью арки; следовательно, во всех
сечениях такой арки изгибающий момент равен нулю. Если ось
арки и кривая давления определяются соответственно уравнениями
y= f(x) и г|=Ф (x),
то условием того, что ось арки имеет рациональное очертание, яв­
ляется тождество
У=ЧРассмотрим случай действия на арку только вертикальной на­
грузки. Составим выражение момента левых сил относительнолюбой
точки с кривой давления:
M c = Vax ^ -H r \— ^ P p = 0,
откуда
Va*-2,PP
. ч = ------н ------ •
Числитель последней формулы численно равен изгибающему
моменту в простой балке в сечении с абсциссой x, т. e. М°, а потому
п = м у н .
Используя соотношения у = ц 9 получаем следующее уравнение
рациональной оси арки:
у= М У Н .
87
Следовательно, при вертикальной нагрузке ось арки будет ра­
циональной, если ее очертание меняется по закону изменения ба­
лочного момента.
Пример. При действии на трехшарнирную арку вертикальной равномерно
распределенной (по ее пролету) нагрузки интенсивностью q требуется установить
рациональиое очертание оси арки, если заданы ее пролет /, стрела подъема f и
координата x - l i 2 среднего шарнира.
Р е ш е и и е . Для решения задачи воспользуемся формулой
y=Ml/H,
где для данного случая
.*о
ql
X
qx п
ч
M x= ^-x-qx^= ^-(l-x);
М°с _ f ql 1
f ~ V2 ' 2
ql 1 \ 1
qP
2 ‘ 4 J f ~ 8f ‘
Следовательно,
f(l-* )8 f
У—
^2
4/
- 7 Г (1- * ) Х>
т. e. рациональной в данном случае является арка с осью, очерченной по квадрат­
ной параболе.
§ 3.5. РАСЧЕТ ТРЕХШАРНИРНЫХ АРОК НА ПОДВИЖНУЮ
НАГРУЗКУ
1. Линии влияния опорных реакций
Расположим на трехшарнирной арке силу P = 1 на расстоянии x
от левой опоры (рис. 3.23, а) и составим уравнение моментов всех
сил сначала относительно шарнира правой опоры, а затем левой:
% M b = Val - 1 ( l - x ) = 0;
2 \Ма = — V Ь1+ 1 •x = 0.
Из этих уравнений найдем:
V
v a = i =i i - > Vu
y b = -1 *
Следовательно, линии влияния Va и Vb ничем не отличаются от
линий влияния опорных реакций простой балки на двух опорах;
они изображены на рис. 3.23, б, в.
Распор H определяется уравнением Я = М ?//, из которого сле­
дует, что линия влияния H имеет такой же вид, как и линия влияния
балочного момента М£, и отличается от нее лишь постоянным мно­
жителем l//; она представлена на рис. 3.23, г\ в частном случае,
когда l\:=~ 12 ~~//2, ее ордината под средним шарниром равна //4/.
2. Линии влияния внутренних усилий
Рассмотрим предварительно способы отыскания таких положе­
ний вертикального груза P на арке, при которых в исследуемом
сечении k или момент, или поперечная сила, или продольная сила
88
равны нулю, т. e. рассмотрим способы отыскания нулевых ординат
линий влияния M hy Qk и N k. К точкам, для которых ордииаты ли­
ний влияния Affc, Qfc и N k равны нулю, относятся, в частности, опор­
ные шарниры арки. Кроме
них имеются и другие такие точки. Эти последние
точки будем называть ну­
левыми. Так, например,
■-и
при положении груза P в
Jb*A*H
точке Fm арки (рис. 3.24)
¥ — ' ^ ^ ^ г г ^ 7Г^
изгибающий момент в сече­
пгттттт^ Линия длияния У
а
\
нии k равен нулю, так как
в этом случае равнодейст­
1И...1ШГШШПШтгш^—
вующая левых сил (опор­
ная реакция А) проходит
Линия длияния \
через сечение k. Точка Fm
определяет, таким образом,
—^гтттггттпТГГЛТТП^^
ljfil
положение нулевой точки
i!
{
для изгибающего момента
Линия
t
ШянияН
I
в сечении k .
Для арки, изображен­
Jl
ной на рис. 3.25, изгибаю­
f
LrrrrTTnTTfT^^
ШгТМт^
щий момент в сечении k ра­
вен нулю, если сила P при­
lf
ложена к консоли (при­
Рис. 3.23
крепленной с этой целью к
арке на участке между се­
чением k и средним шарниром с) в точке Fmy так как и в этом слу­
чае опорная реакция А пройдет через точку k . Если в действи­
тельности консоли нет, то арка не имеет реальной нулевой точки
Рис. 3.24
Рис. 3.25
для изгибающего момента в сечении k. В самом деле, если силу P
перенести по вертикали вверх (рис. 3.25) и приложить ее в точке
m правой части арки, то направления опорных реакций изменятся
и изгибающий момент в сечении k уже не будет равен нулю.
Обозначим через и абсциссу нулевой точки для изгибающего
момента в сечении k> т. e. точки Fm (рис. 3.26). Из треугольника
89
aFFi и bFFi следует:
F ^ = u tg a = w g ;
Поэтому
uyk _ ( l - u ) f
lf
uf
a,fc
W
^2
l^
Ш л-И 1 = Лa^
/2
/2
и, следовательно,
и=
lf
«=
Ve*
i (УЬл-J/а(^ + / 2
Полученное выражение дает возможность аналитически найти
абсциссу и нулевой точки для изгибающего момента M^*
С целью определения нулевой точки для поперечной силы Qh
(рис. 3.27) проводим из левого опорного шарнира а прямую, парал­
лельную касательной s — s к оси арки в сечении k f до пересечения
в точке F с направлением
p=/
bc. Если груз P приложить
теперь в точке Fqi лежащей
на одной вертикали с точ­
кой F, то Qft обратится в
нуль, потому что слева от
сечения k при этом будет
действовать одна лишь
опорная реакция Л, парал­
лельная оси арки в точке£.
Поперечная сила в сечении
Рис. 3.28
kt той же арки(рис. 3.28) бу­
дет равна нулю, если силу
P приложить к консоли (прикрепленной с этой целью к арке на
участке между сечением k^ и средним шарниром с) в точке Fgy ле­
жащей на одной вертикали с точкой F пересечения прямых aF и bc.
90
Из рис. 3.29 видно, что
FFj_=u tg фй; F F i= (/-K ) tg р.
Поэтому
и tg Фk = ( t - u ) tg p = / tg Р—ы tg p,
откуда
_M gp_
t g 9s + tgp
Полученная формула позволяет аналитически определять абсцис­
су нулевой точки для попе}р
речной силы Qfe.
yf N
Продольная сила в сече­
нии k равна нулю при груэе
P , расположенном на консоли
\
\
в точке Fn (рис. 3.30), лежа­
\
f
\
щей на одной вертикали с точ­
\
кой F. Положение точки F
L ^ _ _ _ f i _ i ____ l f c :
определяется
пересечением
направления aF, перпендику­
Uu
лярного касательной s — s к
оси балки в точке k , с направ­
лением be.
Рис. a.29
Из p«с. 3.31 непосредст­
венно устанавливаем:
FF1= u ctg фА; F F ^ ( u + t ) tg р.
Поэтому
и ctg фk=(u+ l) tg p = u tg P + / tg P,
откуда
/ t gp
.
w=
ctg <Pft-tgp
Последняя формула аналитически определяет положение нулевой
точки для продольной си­
лы N k.
Перейдем теперь к по­
строению линий влияния
Afft, Qk и N k.
Начнем с линии влия­
ния M k. При любом поло­
жении груза P = 1 на арке
(рис. 3.31, а) изгибающий
момент в сечении k опреде­
ляется формулой
M k=M°k- H y h.
Из этой формулы следу­
ет, что линия влияния M k является суммой двух линий влияния:
линии влияния изгибающего момента для сечения k простой двух­
опорной балки пролетом 1 (рис. 3.31, б) и линии влияния pacno^
91
pa, все ординаты которой умножены на постоянный коэффициент
y k. Графики этих слагаемых линии влияния изображены на рис.
3 .3 1 ,в ,г.Н ал о ж и в их друг на друга, получим искомую линию
влияния изгибающего момента для сечения й трехшарнирной арки
(рис. 3.31, д). Заметим, что
p= /
точка d , в которой пересека­
ются прямые aJ) и аЬи долж­
на лежать на одной вертикали
с нулевой точкой Fm\ это явля­
ется хорошей проверкой пра­
вильности построения.
На рис. 3.31, e приведена
та же линия влияния, но с ор­
динатами, отложеннымиот оси
абсцисс.
Можно показать, что для
трехшарнирной арки, очер­
ченной по квадратной пара­
боле, площадь линии влияния
I
I
Линия Влияния Нук
M h равна нулю для любого
I
сечения k. В самом деле, мо­
iI
мент в любом сечении такой
арки при действии равномерно
распределенной по всему ее
пролету нагрузки должен
быть равен нулю. Определяя
числовую величину этого мо­
мента с помощью линии влия­
& V L 1 Пиния Ы я н и я Мк
ния, мы составляем равенство:
Оь
M h=qQ> но так как M h= 0,
^тцЩрЛШПЖпв=»
то площадь линии влияния
а
Л евая
п рям ая
Q = 0.
Cf
При построении линии
Рис. 3.31
влияния Qh для сечения k
арки (рис. 3.32, а) воспользуемся выражением
Qk=Q*c os фь— Я в т ф Л|
где Qfe — поперечная сила в сечении k простой двухопорной балки
с пролетом 1 (рис. 3.32, б).
Из уравнения для Qh следует, что искомая линия влияния мо­
жет быть построена сложением линии влияния ф°, все ординаты
которой умножены на постоянный коэффициент cos ф^, и линии
влияния распора Я, ординаты которой умножены на коэффициент
(— sin фь). Результат сложения этих линий влияния изображен на
рис. 3.32, в , где контур abkxk 2a очерчивает линию влияния Q"cos фй,
а треугольник acb является линией влияния Я sin ф^.
Точка d (рис. 3.32, в) должна лежать на одной вертикали с ну­
левой точкой F ^.H a рис. 3.32, г построена та же линия влияния, но
все ординаты ее отложены от оси абсцисс.
92
ffo
i Линия Ьпияния Q%
^ ^y0r>r,
|
|
$P*,C?Gx I I
® Т °^™ ж г^ 5 ™
Рис. 3.32
Линия влияния Нк
S)
Линия Ьпияния A^
I
0- Левая прямая
Рис. 3.33
При построении линии влияния продольной силы воспользуем­
ся выражением
N k=Q°ksin фh+ H cos фЛ.
Графическое суммирование двух составляющих (Qj?sin ф^ и
H cos фь) линии влияния N k для арки, изображенной на рис. 3.33, а,
показано на рис. 3.33, б. Здесь контур abkxk2a очерчивает линию
влияния ф&шфь, а тре­
угольник abc является ли­
нией ВЛИЯНИЯ H COS ф^.
Пересечение прямых а±Ь
и асг должно происходить
в точке d (рис. 3.33, б),
лежащей на одной верти­
кали с нулевой точкой Fn.
Положительные ордина­
ты прямой da± (рис. 3.33, б)
определяют
величину
Qosir^fc, а отрицательные
ординаты прямой dc2— ве­
личину H соэфй, когда груз
P = l приложен к консоли
(рис. 3.33, а) в точках над
этими ординатами. Если
груз P = 1 приложен в точ­
ке m на консоли (рис.
3,33, а), то величина про­
дольной силы в сечении k
арки определится как раз­
ность абсолютных значе­
ний ординат z/i и у 2, т. e.
будет равна отрезку m^m^
Если при построении
линий влияния M h9 Qh и
N k заранее определить ну­
левые точки, то можно не
производить графического
Рис. 3.34
суммирования составляющихлиний влияния, а стро­
ить их' сразу с ординатами, отложенными от оси абсцисс. Такой
прием построения линий влияния носит название с п о с о б а н yл e в о й т о ч к и. Порядок построения линий влияния M k, Qk и
N k способом нулевой точки легко может быть установлен по лини­
ям влияния этих усилий, приведенным на рис. 3.31, e, 3.32, г и
3.33, в.
Например, при построении этим способом линии влияния М к
надо (рис. 3.31, ё):
1)
на левой опорной вертикали (если сечение k принадлежит
левой половине арки) отложить абсциссу сечения k\
94
2) спроецировать (снести по вертикали) иулевую точку Fm на
ось абсцисс;
3) соединить вершину опорной ординаты ak с нулевой точкой d
на оси абсцисс (прямая a1dc1, называемая первой правой);
4) спроецировать (снести по вертикали) сечение k на первую
правую прямую (точка k^;
5) соединить точку kx с нулем на левой опоре (прямая k^a, назы­
ваемая левой);
6) спроецировать (снести по вертикали) на первую правую пря­
мую средний шарнир с (точки c0;
7) соединить точку сх с нулем правой опоры (прямая сф, назы­
ваемая второй правой).
На рис. 3.34 приведены линии влияния, построенные способом
нулевых точек
§ 3.6. ЯДРОВЫЕ МОМЕНТЫ И НОРМАЛЬНЫЕ НАПРЯЖЕНИЯ
При внецентренном сжатии наибольшие нормальные напряже­
ния возникают в крайних (наиболее удаленных) точках поперечного
сечения; они определяются по формуле
м
w
где F — площадь поперечного сечения; W — момент сопротивле­
ния его *; N и M — соответственно продольная сила и изгибающий
момент в рассматриваемом сечении.
При этом предполагается, что усилия
N и M действуют в плоскости, проходя­
щей через одну из главных осей инерции
поперечного сечения и перпендикуляр­
ной плоскости этого сечения.
При действии на арку подвижной
нагрузки для определения наибольших
нормальных напряжений по приведен­
ной формуле приходится одновременно
загружать линии влияния N и M , имею­
щие различные очертания (к тому же одна
из них двузначна). Поэтому целесооб­
разно выражение для а видоизменить
так, чтобы двучленная формула .преоб­
Рис. 3.35
разовалась в одночленную.
Для этого поступим следующим образом. Равнодействующую
левых сил R , приложенную в сечении (рис. 3.35), разложим на две
составляющие N и Q. В одной из крайних точек ядра сечения,
например в верхней точке^- (рис. 3.35), приложим перпендикуляр­
но сечению две взаимно уравновешивающиеся силы N. В результате
в сечении будет приложено три силы N, которые могут быть теперь
1 При симметричном поперечном сечении (относительно обеих главных осей
инерции) моменты сопротивления W для верхних и нижних волокои одинаковы.
95
сведены к паре с моментом N (е+сг) и продольной силе N, действую­
щей в крайне верхней ядровой точке.
Величина нормального напряжения в нижней точке m сечения
может быть теперь найдена по формуле
N(e + Ct)
wm
так как от силы N, приложенной в верхней ядровой точке, нор­
мальные напряжения в нижней точке m сечения равны нулю.
Произведение N ( e + c ^ представляет собой момент продольной
силы, действующей в сечении, относительно верхней ядровой точки
ku называемой ядровым моментом. Ядровый момент отличается от
обычного изгибающего момента лишь тем, что при его вычислении
приходится умножать левые силы на расстояния не до центра тя­
жести сечения, а до одной из его ядровых точек. При определении
нормального напряжения в точке n (см. рис. 3.35), очевидно, можно
пользоваться аналогичной формулой (только брать момент ле­
вых сил относительно нижней
ядровой точки и заменить W m величиной Wn):
G.
Итак,
ДЛ^х)
; ядр
оm
wm
N (е ~ с г)
Wn
м№
2)
ядр
Wn
где Мядр — момент внешних ле­
вых сил относительно верхней
ядровой точки ku Л4ядр — момент
тех же сил относительно точки
&2*
Эти формулы являются одно­
членными и, следовательно, поз­
воляют более просто решать зада­
чи, связанные с отысканием наи­
больших напряжений в сечениях
арки при действии на нее под­
вижной нагрузки. Необходимые
в этом случае линии влияния яд­
ровых моментов строятся так же,
как и линия влияния изгибаю­
^чи^щцпппишшя1 *
щего момента.
На рис. 3.36 приведены линии
3.36
влияния двух ядровых и изги­
бающего (рис. 3.36, в) моментов для сечения k трехшарнирной арки,
построенные методом нулевой точки. Наличие у линий влияния
ядровых моментов под центром тяжести сечения k (рис. 3.36, б, г)
небольших вертикальных скачков (уступов), образующих добавоч96
*
ные треугольники (на рисунке они залиты тушью), объясняется тем,
что в этом месте линия влияния продольной силы N k имеет скачок.
При решении практических задач площадью этих добавочных тре­
угольников ввиду их сравнительной малости
обычно пренебрегают.
Решимспомощью построенных линий влия­
ния ядровых моментов следующую задачу.
Установим, какую часть арки надо загрузить
равномерно распределенной нагрузкой (или
какой-либо заданной системой сосредоточен­
ных сил), чтобы в верхней точке n сечения k
(рис. 3.36, а) нормальные напряжения были
наибольшими растягивающими. Растяжение в
точке n возможно лишь в том случае, если
равнодействующая левых (или правых) сжи­
мающих сил в рассматриваемом сечении арки
Рис. 3.37
(рис. 3.37) пройдет ниже ядровой точки k 2.
При этом момент равнодействующей относительно точки k 2 будет
отрицательным.
Следовательно, для решения поставленной задачи надо загру­
зить заданной нагрузкой ту часть арки, которая соответствует от­
рицательному участку линии влияния Мядр- При загрузке поло­
жительного участка той же линии влияния Мядр нормальные на­
пряжения в точке n будут сжимающими.
Аналогично решается и задача определения наибольших нор­
мальных напряжений в нижней точке m рассматриваемого сечения.
4
№ 2418
Гла вa 4
ПЛОСКИЕ ФЕРМЫ
§ 4.1. ПОНЯТИЕ О ФЕРМЕ. КЛАССИФИКАЦИЯ ФЕРМ
Фермой называется стержневая система, остающаяся геометри­
чески неизменяемой после условной замены ее жестких узлов шар­
нирными. Фермы имеют назначение, по существу, такое же, как
и балки сплошного сечения, но применяются для перекрытия зна­
чительных пролетов, когда проектирование сплошных балок (на­
пример, двутавровых) становится экономически невыгодным вслед­
ствие неполного использования материала стенки, напряжения
в которой меньше, чем в полках (см. эпюру нормальных напряже­
ний в поперечных сечениях балки на рис. 4.1),инеобходимости
3nk)pcr норШлЬныК
Полк#
d8ymo6pff
напряжений
^ f i Z * СтШ(Г
^dSt/ma6pcr
Мейтромноя
ОСЬ
Рис. 4.1
утолщения вертикальной стенки в связи с возможностью ее выпу­
чивания (при значительной высоте стенки). В таких случаях сплош­
ную балку заменяют стержневой системой — фермой, элементы
которой (стержни) при действии сосредоточенных нагрузок, при­
ложенных в узлах, работают главным образом на центральное
сжатие или растяжение. Это дает возможность значительно лучше
использовать материал фермы, так как эпюры нормальных напря­
жений в поперечных сечениях каждого из ее стержней практически
имеют вид прямоугольников. Поэтому ферма легче балки со сплош­
ной стенкой, имеющей одинаковые с ней пролет и высоту. Примером
фермы может служить система, изображенная на рис. 4.2.
Кроме плоских ферм, у которых оси всех стержней расположены
в одной плоскости, применяются пространственные фермы, оси эле­
ментов которых не лежат в одной плоскости (рис. 4.3). Расчет про­
странственной фермы во многих случаях удается свести к расчету
нескольких плоских ферм.
98
Расстояние между осями опор фермы (рис. 4.4, а) называется
пролетом; стержни, расположенные по внешнему контуру фермы,
Рис. 4.3
называются поясными и образуют пояса; стержни, соединяющиепояca, образуют решетку фермы и называются: вертикальные — стойками, наклонные — раскосами. Расстояние между соседними узла­
ми любого пояса фермы (обычно
измеряемое по горизонтали) на­
зывается панелью.
Классификацию ферм прове­
дем по следующим пяти призна­
кам: 1 ) характеру очертания
внешнего контура; 2 ) типу решет­
ки; 3 ) типу опирания фермы;
4) назначению фермы; 5) уровню
езды.
П о х а р а к т е р у очерт а н и я различают фермы с па­
раллельными поясами (рис.4.4,я)
и с ломаным или так называе­
мым полигональным расположе­
нием поясов. К последним от­
носятся, например, фермы с па­
4*
99
раболическим очертанием верхнего пояса (рис. 4.4, б) и фермы
треугольного очертания (рис. 4.4, в).
П о т и п у p e ш e т к и фермы делятся на: фермы с треуголь­
ной решегкой (рис. 4.5, а)\ фермы с раскосной решеткой (рис. 4.5, б);
Рис. 4.5
фермы с полураскосной решеткой (рис. 4.5, в); фермы с ромбической
решеткой (рис. 4.5, г); двухрешетчатые (рис. 4.5, д), многорешет­
чатые (рис. 4.5, e).
YS,>ah(i,i<Ui'/'S'u,-t<i.'i
Рис. 4.7
100
Рис. 4.8
' П о т и п у о п и p а н и я фермы могут быть: закрепленными,
у обоих концов — балочными (рис. 4.6, а) или арочными
(рис. 4.6, д, e); консольными — закрепленными у одного конца
(рис. 4.6, б); балочно-консольными (рис. 4.6, в, г).
В зависимости от н а з н а ч e н и я различают фермы стропиль­
ные (рис. 4.7, а), крановые (рис. 4.7, б), башенные (рис. 4.7, б),
мостовые (рис. 4.8) и др.
Мостовые фермы в зависимости о т у p о в н я e з д ы делятся
на фермы с ездой понизу (рис. 4.8, а), фермы с ездой поверху,
(рис. 4.8, б) и фермы с ездой посередине (рис. 4.8, в).
§ 4.2. ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПРОСТЕЙШИХ ФЕРМ
Фермы, образованные из шарнирного треугольника путем после­
довательного присоединения узлов (причем каждого с помощью двух
стержней, не лежащих на одной прямой), называются простейшими.
Такие фермы геометрически неизменяемы и статически определимы
(см. § 1.2 и 1.3).
В § 1.3 было указано, чтодля любой статически определимой фер­
мы можно составить 2 К уравнений статики (где К — число узлов
фермы), с помощью которых можно найти опорные реакции и внут­
ренние усилия (продольные силы) в ее стержнях от действия внеш­
ней нагрузки. При этом в первую очередь обычно определяют опор­
ные реакции. При определении реакций составляют три уравнения
равновесия для всей фермы в целом.
Для определения внутренних усилий следует выделять сечения­
ми узлы или отдельные части фермы и рассматривать условия их
равновесия под действием внешних нагрузок и усилий в рассечен­
ных стержнях. Всего можно составить 2К —3 таких условий (т. e.
независимых друг от друга уравнений).
Выделение узлов или частей фермы необходимо производить
так, чтобы усилия в элементах фермы определялись наиболее прос­
то, по возможности без совместного решения системы уравнений со
многими неизвестными. Это позволяет не только значительно упрос­
тить расчет, но и получить более точные результаты.
Ниже излагаются способы расчета, позволяющие определить
внутреннее усилие в каждом из элементов фермы, как правило,
с помощью одного уравнения с одним неизвестным.
Способ момеитной точки. Способ моментной точки применяется
главным образом в тех случаях, когда удается рассечь ферму на две
части так, чтобы при этом перерезанными оказались три ее стержня,
направления осей которых не пересекаются в одной точке (см., на­
пример, сечение I—/ на рис. 4.9, слева) *. Направления осей трех
таких перерезанных стержней пересекаются попарно в трех точ­
ках, не лежащих на одной прямой (рис. 4.9, справа).
Составляя последовательно уравнения моментов всех сил (внеш­
них и внутренних), действующих на отсеченную часть фермы, отно1 Способ моментной точки, как это будет показано далее, может применяться
и в более сложных случаях.
101
сительно этих трех точек, будем каждый раз получать уравнение
с одним неизвестным, представляющим собой усилие в рассеченном
стержне, не проходящем через рассматриваемую точку пересече­
ния стержней.
Таким образом, для определения усилия в каком-либо стержне
необходимо разрезать ферму так, чтобы в разрез кроме данного
стержня попали еще два других (оси которых не сходятся с ним
Точка пересечения стержней Н и2~$
Мл
lP \
Точка пересечения стержней 2:3и 2 1
'! •
Рис. 4.9
в общей точке), после чего из уравнения моментов относительно
точки пересечения осей этих двух стержнейзгожно легко определить
усилие в данном стержне.
Точка пересечения осей двух стержней, относительно которой
составляется уравнение моментов, называется моментной.
При составлении уравнений равновесия все неизвестные усилия
в стержне фермы условно считаются положительными, т. e. растя­
гивающими и, следовательно, направленными от узлов. Если после
решения уравнений какое-либо усилие окажется отрицательным,
то, значит, оно является сжимающим и направлено к узлу.
Рис. 4.10
Перейдем к примерам расчета, поясняющим способ моментной
точки.
Условимся усилия в элементах верхнего пояса фермы обозна­
чать буквой 0 , усилия в элементах нижнего пояса — буквой U,
усилия в раскосах — буквой D, усилия в стойках — буквой V .
У этих букв внизу будем ставить цифры, соответствующие узлам
фермы, к которым присоединен данный стержень.
Рассмотрим ферму, изображенную на рис. 4.10, а. Найдем уси­
лие в стержне 3—5. Для этого рассечем ферму по линии / —/, пере­
102
секающей рассматриваемый стержень 3— 5 и два других. Разрезав
таким образом ферму на две части, одну из них отбросим и рассмот­
рим условие равновесия другой части.
Всегда проще рассматривать ту часть фермы, на которую дей­
ствует меньше сил, а потому в данном случае рассмотрим ее левую
часть. Она должна оставаться в равновесии под действием внешних
сил Я А и Р г и внутренних усилий 0 24, D 34 и U3b в рассеченных эле­
ментах; эти усилия заменяют собой действие отброшенной правой
части фермы на левую (рис. 4.10, б).
Для определения неизвестного усилия U3b с помощью одного
уравнения с одним неизвестным составим сумму моментов всех сил,
действующих на левую часть фермы, относительно точки пересече­
ния рассеченных стержней 2— 4 и 3—4Ут. e. точки 4. Эта точка при
определении усилия в стержне 3—5 будет моментной точкой.
Сумма моментов всех сил, действующих на левую часть фермы,
относительно точки 4 имеет вид
M ^ R Aai—PiPi— U 3bh = § ,
откуда
U 3, = { R Aa , ~ P lPl) i h = M y K
где h — плечо усилия U zb относительно моментной точки, равное
в данном случае высоте фермы; М%— момент всех внешних (включая
и опорную реакцию) сил, приложенных к выделенной части фермы,
относительно узла 4, равный
изгибающему моменту в прос­
той балке в сечении, соответ­
ствующем положению момент­
ной точки.
^
В самом деле, если данную
ферму с действующей на нее ЯА
вертикальной нагрузкой за­
менить простой балкой того
же пролета (рис. 4.11), то из­
гибающий момент в ее сечении с абсциссой, равной абсциссе мо­
ментной точки 4Убудет равен моменту сил, приложенных к левой
отсеченной части фермы, относительно этой точки.
Таким образом, усилие в элементе нижнего пояса фермы U3b
равно отношению изгибающего (балочного) момента в соответствую­
щем сечении простой балки к плечу h.
Так как изгибающий момент в балке при любой нагрузке, дей­
ствующей сверху вниз, всегда положителен, то усилие U 35 также
всегда положительно, т. e. стержень 3—5 растянут. При заданной
нагрузке все остальные стержни нижнего пояса фермы также растя­
нуты.
Определим усилие в элементе 2— 4 верхнего пояса фермы. Для
этого составим выражение момента всех сил, действующих на отсе­
ченную левую часть фермы, относительно моментной точки (т. e.
узла 3, см. рис. 4.10, б):
2 М з= Я Абг—Л ^ / 2 + 0 24г = 0 ,
\
103
откуда
Числитель дроби, обозначенный M°3= R Ad—Pid/2, равен изги­
бающему моменту простой балки (см. рис. 4.11) в сечении с абсцис­
сой x=d. Так как «балочный» момент Ml при действии заданной
нагрузки всегда положителен, а перед отношением МУг в формуле
стоит знак минус, то усилие 0 24 отрицательно, т, e. элемент 2— 4
сжат.
Аналогичным путем можно доказать, что все элементы верхнего
пояса фермы при нагрузке, действующей сверху вниз, будут сжаты.
Для определения усилия D 34, возникающего в раскосе 3—4Усо­
ставим выражение момента всех сил относительно точки k , распо­
ложенной вне контура фермы (см. рис. 4.10, б), в которой пересе­
каются оси стержней 2— 4 и 3—5:
2 ^ k — —Кла ~Ь P 1 (а ~Ь ^/2)
^34^ k “
0»
откуда
n
-
Pi (a + d / 2 ) - R Aa _
34
rk
М%
rk
Итак, при применении способа моментной точки числовая ве­
личина усилия определяется выражением
N=
момент внешних си л _M
r
плечо усилия
(4.1)
Здесь M представляет собой момент сил, действующих на отсе­
ченную часть фермы, относительно моментной точки, a r — плечо
искомого усилия относительно той же точки.
Pt
—< —■■
jt
с
■■■■ >
U/<7
f Ks
X
t rfX
v
i 1 ^65
I_____^ _ t t ,
6
J
*A
Рис. 4.12
Рис. 4.13
При определении усилий в элементах верхнего или нижнего поя­
са более сложной фермы (из числа простейших ферм), изображенной
на рис. 4.12, также можно применить способ моментной точки. В са­
мом деле, если разрезать ферму по линии / —/ и составить выражение
суммы моментов сил, действующих на ее левую часть (рис. 4.13),
относительно узла 6, в котором сходятся три из четырех перерезан­
ных стержней, то полученное таким образом уравнение с одним не104
известным даст возможность определить усилие в стержне 4—7:
S ^ = ^ + o ^ = o ,
откуда
Oi7= — R Ad/h = — M y h .
Для определения усилия в стержне 6—9 нижнего пояса фермы
составим уравнение моментов сил относительно точки 4:
2 Af4= R Ad — Ue9h = 0,
откуда
U„ = R Adlh = MHh.
На рис. 4.14 изображена сложная ферма (также относящаяся
к категории простейших), усилия в поясах которой тоже могут
быть найдены способом моментной точки.
Для определения усилия в стержне 7— 9 сделаем разрез / —/,
пересекающий кроме данного стержня еще пять стержней, сходя­
щихся в одной общей точке (в узле 10). Составим выражение суммы
моментов всех сил, действующих на отсеченную левую часть фермы
(рис. 4.15), относительно этой точки:
2 -M 10= R A - 4 d - 4 P *2 ,М + 0 79А=0,
откуда
0 7д= —(4# Ad— 10Pd)/h.
Рассмотрим еще так называемуюферму сетчатого покрытия, пред­
ложенную В. Г. Шуховым для перекрытия одного из больших
зданий в Москве (рис. 4.16) 1.
Эта ферма геометрически неизменяема, так как состоит из двух
основных треугольников: 1—4—5 и 2—3—6, соединенных между
собой тремя стержнями 1—2, 3— 4 и 5—6, оси которых не пересе­
каются в одной общей точке. Ферма статически определима, так
как число ее стержней S удовлетворяет условию S=^2K—3, а имен­
но: 9 = 2 * 6 -3 , т. e. 9 = 9 . Ферма Шухова интересна тем, что для нее
нельзя провести разрез, пересекающий только три стержня или же
1 Эта ферма не относится к категории простейших, но усилия в ее элементах
можно определить способом моментной точки,
105
какое-либо другое число стержней, так, чтобы все, за исключением
одного, пересекались в одной точке.
Для расчета этой фермы проведем замкнутое сечение r—s— t
так, чтобы оно перерезало стержни 1—2, 3—4 и 5—6 по одному разу,
а стержни 1—4 и 1—5 — по два раза.
Как видно из рис. 4.17, выделенные части дважды перерезан­
ных стержней 1— 4 и 1—5 будут уравновешены усилиями, прило­
женными по их концам: останутся только три неизвестных усилия:
Oi2, 0 34 и 0 56, которые легко определить способом моментной точки.
Для определения усилия в стержне 1— 2 составим сумму момен­
тов всех сил, действующих на выделенную сечением r — s — t часть
фермы, относительно точки пересе­
чения направлений стержней 3—4 и
5—6, т. e. точки &1 (рис. 4.17):
^ lM kl= — 0 1!!rk— Pp— R Bbh= 0,
откуда
0 ±2~
(^в^ь~Ь Pp)Ir k-
^R
Моментной точкой при определе8 нин усилия 0 34 будет точка пересече­
ния направлений стержней 1—2 и 5—
Рис- 4*18
6, т. e. точка £ 2> а при определении
усилия 0 5б— точка k B (рис. 4.18).
Таким образом, усилия 0 12, 0 34 и 0 5е определяются независимо
друг от друга с помощью трех уравнений, каждое из которых со­
держит по одному неизвестному.
Усилия в остальных стержнях могут быть определены с помощью
сечений, пересекающих любое число стержней, если при этом не­
известны усилия не более чем в трех рассеченных стержнях.
На основании рассмотренных примеров можно сделать следую­
щие выводы:
1.
Способом моментной точки удобно пользоваться при расчете
ферм, когда можно провести разрез, пересекающий кроме данного
стержня (усилие в котором определяется) любое число стержней,
сходящихся в одной общей точке, не лежащей на направлении оси
данного стержня.
106
2. Способ моментной точки удобен также и в случаях, когда
разрез пересекает более трех стержней, не сходящихся в одной
точке, если усилия во всех стержнях, кроме трех, уже известны.
3. Способ моментной точки применим и для расчета таких ферм,
в которых возможно провести разрезы, пересекающие любое число
стержней сверх трех, если при этом каждый добавочный стержень
пересекается дважды.
Как видно, при расчетах ферм по способу моментной точки каж­
дое усилие определяется с помощью одного уравнения с одним
неизвестным. При этом уравнение моментов составляется таким
P
^^
V
* fye
_М
! 1
а'57
Рис. 4.20
образом, что в состав еговходят толькодействующиенаферму внеш­
ние силы и одно определяемое усилие в рассчитываемом элементе.
В этих случаях возможная ошибка при определении усилия в од­
ном элементе не оказывает влияния на
P
усилие в другом элементе.
Г
Способ проекций. Способ проекций
4'
____
применяется главным образом в следую­
щих двух вариантах:
1) рассматривается равновесие части
V 1
фермы (как и при способе моментной
--- w
■
точки), когда два из трех рассеченных
^
i
6
г
ип
стержней параллельны друг другу;
3)
рассматривается равновесие выде­ ^
ляемых из фермы узлов (способ выре­
Рис. 4.21
зания узлов) *.
Определим усилия в элементах решетки фермы, изображенной
на рис. 4.19.
Для определения усилия К5е разрежем ферму сечением / —/,
пересекающим стержни 4—6У5—6 и 5—7. Так как моментная точка
для усилия V*>6 вследствие параллельности стержней 4—6 и 5—7
находится в бесконечности, то составить уравнение моментов от­
носительно этой точки невозможно. Поэтому составим условие рав­
новесия в виде суммы проекций всех сил, действующих на отсечен­
ную часть фермы (рис. 4.20), на ось, перпендикулярную ее поясам
(в это уравнение усилия в поясах не войдут, так как они перпенди­
Y
[
STt
6 \
1 Часто первый из указанных вариантов способа проекций и способ момент­
ной точки рассматривают как варианты метода сечений.
107
кулярны оси проекций):
^ Y = R * - P + V * = 0,
откуда
V бб“ -- (R A P ) - Qi
где Q — поперечная сила в простой балке.
Для определения усилия D 67 разрежем ферму по линии I I —I I
(см. рис. 4.19) и составим уравнение равновесия для левой ее части
(рис. 4.21):
^ Y = R A— P— P—D 67sin a = 0 ,
откуда
D e7= ( R A—2P)/sin a=Q /sin a,
где Q — поперечная сила в простой балке, равная R A—2Р.
При расчете простейших ферм все усилия можно определить
способом проекций, применяя его последовательно к каждому узлу.
При этом определение усилий надо начинать с узла, в котором схо­
дится не более двух стержней.
Для примера определим усилия в стержнях 1—2, 1—3, 2— 3 и
3—5 фермы, изображенной на рис. 4.22. Вырежем сначала левый
опорный узел (рис. 4.23) и рассмотрим условия его равновесия.
Для определения усилия 0 12 спроецируем все силы, действую­
щие на узел, на ось, перпендикулярную направлению стержня
1—3, т. e. на вертикальную ось у :
'% Y = R A+ 0 1£in a = 0 ,
откуда
0 12——R A/s\n а.
В данном случае R A равно P/2, а потому
0 12= —P /{2 sin a).
Для определения усилия U13 спроецируем все силы, действую­
щие на опорный узел, на ось, перпендикулярную направлению
стержня 1—2, т. e. на ось ух\
2 Ух — R A cos а — U19 sin a = 0,
откуда
U13 = %л cos a/sin а = (P/2) ctg a.
108
Отметим, что усилие в стержне 1— 3 можно было определить
и из уравнения проекций всех сил на ось x:
откуда
13
Подставив в последнее уравнение значение усилия 0 12, полу­
ченное ранее, найдем
U 13
+
2 sin ос
cos а = ^r ctg а.
Для определения усилий в стержнях 5— 2 и 5— 5 вырежем
узел 3 и рассмотрим условия его равновесия (рис. 4.24).
Составим сумму проекций сил на
(
ось x:
I^
j ; x
= - u
n + u , 5
= o,
I
откуда (учитывая, что через U31 и U13
обозначено одно и то же усилие, а имен­
но усилие в стержне, соединяющем узлы
1—3), получим
^35
=
^13
= T O Ctg а .
j 1 V32
Uji
<
^
Vjs
>
Рис. 4.24
Спроецировав все силы на вертикальную ось у у получим
2 г = к 32= о .
Усилие в стержне 3— 2 было бы также равно нулю, если
этот стержень и не был бы перпендикулярен стержням 1— 3 и 3—5.
Следовательно, если в узле сходятся три стержня, два из кото­
рых лежат на одной прямой, то усилия в этих двух стержнях, при
\У
отсутствии в узле внешней нагрузки, равны друг другу по числовой
величине и по знаку, а усилие в третьем стержне равно нулю.
Рассмотрим условия равновесия узла 2, найдем усилия в стерж­
нях 2—4 и 2—5; они будут определяться через уже известные нам
усилия 0 21 и К2з (или Oi2 и V32).
109
Таким образом, при расчете фермы способом вырезания узлов
усилия в ряде стержней можно найти только после предваритель­
ного определения усилий в других стержнях. В связи с этим слу­
чайная ошибка в определении одного усилия может привести к не­
правильному определению усилий в целом ряде стержней. Кроме
того, недостатком этого способа является и то, что в уравнения
равновесия всегда входят тригонометрические функции; это услож­
няет расчет.
Отметим, что если к узлу, в котором сходятся два стержня, не
лежащие на одной прямой, не приложена внешняя нагрузка, то
усилия в этих стержнях равны нулю. В этом можно убедиться, рас­
смотрев условия равновесия узла 1 фермы, изображенной на
рис. 4.25.
В самом деле, из уравнений проекций на вертикальную ось у
и горизонтальную ось x всех сил, действующих на узел 1 (рис. 4.26),
^ K = O izsin a = 0 и 2 ^ = ^ i 2cos <*+tAs=O
следует, что
О12—£Лз= 0.
Обычно при расчете фермы пользуются и способом моментной
точки и способом проекций, применяя каждый раз тот из них,
с помощью которого более
просто определяется усилие
п в данном элементе.
Пример 1» Определить усилия в
^ элементах 4—6, 3—6 и 8—7 фермы^ консоли, изображенной на рис. 4.27.
'^
Для определения усилий pacce” 4 каем ферму, как показано на рис.
4.27, и рассматриваем равновесие
левых отсеченных частей. Расчет
сведен в табл. 4.1.
Пример 2. Для ферм, изобра­
Рис. 4.27
женных на рис. 4.28, 4.29, 4.30 и
4.31, имеющих одинаковые пролеты и нагрузку, определить усилия во всех эле­
ментах (стержнях) и построить эпюры этих усилий.
Результаты расчета приведены соответственно на рис. 4.32, 4.33, 4.34 и 4.35
в виде эпюр усилий. Ширина каждой полоски этих эпюр пропорциональна числоP =lQxH
7%?
Р
х=30кН ''Pt=50кН >'P;-З
О
к
Н\'РгМк*
КА Ч 0 0 к Н
R* =W0
t = 6d = 30*t
Рис, 4.28
110
в кН
T а б л и ц а 4.1
Рассекаю ­
щее
ферму
сечение
Эскиз отсеченной части фермы, для
которой составляется уравнеиие равно­
весия
Уравнение равн о­
весия
4—6
I—I
З~~6
/—/
^K =-P+
8—7
I I —II
2 ^ = -p —Vsi —0
Реш ение
уравнения
0 ^ = Pdfh -
= > .l,5 /2
- f D 3Gs in a — 0
р астя­
жение
(+ )
сжатие
(-)
Р езультат
С терж ень,
в котором
опреде­
ляется
усилие
Примечание
См. рис. 4.27
(й = 2 м ; d = 1,5 м;
tg a = h/d =
= 2/I.5 = 4/3;
sin a = 4/5)
D зп = P/ sin a =
= P- 5/4
К87= ~Р
См. рис. 4.27
вой величине усилия в соответствующем элементе фермы; полоски, изображающие
положительные усилия (растяжение), не заштрихованы, а отрицательные (сжа­
тие) — заштрихованы *.
Для фермы, изображенной на рис. 4.30, составлена табл. 4.2., в которую све­
ден весь расчет.
р-ЮкН
*р^ЗОкНlp, - ЗОкН'pf =50n>npj -ЗОкН'p, =30кН‘
^
i<
t = ЗОм
е£
*?
Рис. 4.29
- ЮкИ
л'pf ■=58кН* Pj -ЗОкН Р1-30*£
яА=юонн
RB- tQ0KH
Рис. 4.31
Сравнивая между собой эпюры усилий в элементах трех ферм (имеющих оди­
наковые пролеты, один и тот же тип решетки, а также одинаковую нагрузку),
представленные на рис. 4.32, 4.33 и 4.34, приходим к следующему заключению:
самой невыгодной является треугольная ферма (см. рис. 4.29), так как общая плоУсилия в элементах ферм даны в кН,
112
щадь полосок эпюры у нее больше, чем у каждой из двух других, и, следователь­
но, она окажется по массе наиболее тяжелой из трех рассматриваемых ферм.
Пример 3. Определить усилия в элементах фермы с параллельными поясами
при полураскосной решетке (рис. 4.36, а).
Вырежем любой средний узел (где два полураскоса одной панели пересе­
каются со стойкой) и спроецируем все действующие на него усилия на горизонталь­
ную ось (рис. 4.36, б):
Z X —D cos a+ D 'cos a '- 0 ,
откуда
D cos а ——D' cos a ',
где а и a '— узлы наклона полураскоса к горизонту.
113
T а б л и д а 4.2
Результат
Уравненне
равновесия
Реш ение
уравнения
растяжеиие
(+ )
4—6
\
// \ \
<y
/
/
2 > * =
^ R A-3d-
\
n _
R^'Sd, .
^46----------- ------- Г
~2Р-l,5 d -
\
Р'-ЮкН
p=w*H i ' ' J j w 3 - -
- 2 P ^ l,5 d +
+ ^46Г = 0
182 r = (a + 3 d ) sfri a ;
t g a = l/9
(см. рис. 4.30).
Сдругойстороны,
tg c t =
=8(d/9)/(fl+2d);H 3
последнего равен­
ства определится
величина a = 6d;
tg a
sin a = . ............
+ 3Prf + 3 P ^
*
г
*L
^>
f T n ^ ^
r*--------- H *
Р,-ЗВкН
RA=t00KHPl=3BK>i
4—7
П рнм ечаиия
( -)
З скн з отсеченной части фермы или
вырезанного узла
сжатие
Р ассекаю ­
Номер
стерж ня, щее ферму
в котором
сеченне
опреде­
’ илн
ляется
вы р езае­
усилие
мый узел
V l+tg2a
1— 1
2 ^*=
— &Аа +
n _ $Аа |
47-- ^ --Г
+ 2 P ( a + l ,5 d ) +
+ 2Px (яЦ~
- 2 P ( a + l , 5 d ) ,^
_l,---------------------------'2
~f" 1»5rf) ^A^-D^ri = 0
- 2 P ^ f l + l ,5 d )
г2
0
0
r<i= (a+ 3d) sin £;
t g p = 8/9
(см. рис. 4.30)
П родолжение
5—7
M i= R A 2 d - P d - P i_ d -
2
- t/
7—6
JOy^O
//—//
v76
у
5 7
^ d = O
y>Y ^V
7 6 -
и 57
—
(^
2
d --------
- « - M
180
g
V ^P i
30
D i7 = D 78 ~ 0
(см. рис. 4.30)
-P j = O
"^^^^^rT
2—4
^- R4 j^='23d —
-Pd-P^ +
+ ^24Г3 =
5— 4
См. рис. 4.30
0
P*10rcH
lll- III
s > * ,=
— RAai 4 -
—
4 ^ i^ T ^
k’ Ж
\
^
^T ^57
*
* Pf =ЗОкН
P,=30KH
R , -ЮОкН
**Л
1
+ P(<h + d) +
+ 2 P ,(l,5 4 +
+ Gi) ^ 5 4 X
O u = - ^ f^ +
, P d + P x rf
Г3
P (a j+ J )
^4~ - 2d+ax" +
I 2 P 1 (l,5 rf^-fli)_
~r
2d + ax
~
X(2d + cti) = 0
2
fl^ l
d + ax
30
190 > a = (tfi+ 2 d) sin a x;
t g a i = 3/9
Д ля определения
ax можно соста­
вить равенство
(5d/9)/(ai + d) =
==:tg ax = 3/9
Продолжение табл. 4.2
Номер
Рассекаю­
стержня, щее ферму
в котором
сечение
или
опреде­
ляется
вырезаоусилне
мый узел
Результат
Эскиз отсеченной части фермы или
вырезанного узла
P- 10fiH
'_>*^4
'^ 0
^^2 5
<y
,
Z < ^ * ^ s< r с
' l i \1
о, '
ч^—>.
3г ^ г 5
, UJ
3—5
i°=80кН
Rr
1П0
1— 3
U31
3—2
(з
V I— VI
, ^
2
M 2= R Ad -
-tf*e^ d = O
x = -i/,x
+ 1 /3 5 = 0
£>25 =
_ f l ^ i — P(d^-a1 )__
Примечания
*0 «—
I
n=(ai^-2d) sin а а;
0
0
t g a 2 = 5 /9
P1 ( d ^ a 1)
^4
rr
$Ad „
U№ ~ ~ 5 d ~
9
180
См. рис. 4.30
U 31 = ^ 3 5
180
См. рис. 4.30
s ^ =
= V '32-P l = 0
Vn = Pi
s^ = * ^ +
+ O 1 2 sin а 2 = 0
p
30
п
«а
fW * H
+
%
n
*
IR
2
^ * ,=
~ — RA<*i +
+ P (d + fli) +
4~ P 1 (d + ai) +
4“^25^4 “ 0
2
' ^ =зокН
^ г
1—2
растя- v
s
н3^,
жеиие C
кН
Узг
V— V
Решение
уравнения
(+ )
2— 5
IV — IV
Уравнение
равиовесия
#Л
^12 — ------ :—......
sin а 2
205 См. рис. 4.30
Р=Ю кЯ
p , -30nH JPt --ЗОКНЧР1 -ЗОкН
fig--WO
B fiff
RA=ЮОкЙ s) V
3
Рис. 4.36
Рис. 4.37
117
Е с л и а = а \т о D = —Dr, т, e. усилия в полураскосах однойитойжепанели
равиы между собой, но противоположны по знаку.
Определения усилий в элементах фермы не приводим; эпюра усилий изобра­
жена на рис. 4.37.
На рис. 4.38, а — e приведены системы, в которых ряд стержией отмечен чер­
точками. Читателю предлагается доказать, что при заданной нагрузке усилия
в отмеченных стержнях равны нулю.
§ 4.3. ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ СЛОЖНЫХ ФЕРМ
Кроме простейших систем, т. e. систем, образованных из шар­
нирного треугольника путем последовательного присоединения
к нему новых узлов (причем каждого с помощью двух стержней, не
лежащих на одной прямой), встречаются системы и с более сложной
геометрической структурой (образованием). Эти системы, называе­
мые сложными, в ряде случаев могут быть получены из простейших
заменой одних стержней другими без нарушения геометрической
неизменяемости всей системы.
°1
3
$
j
Рис. 4.39
Расчет сложных систем часто требует совместного решения
уравнений. Однако перестановкой стержней сложные системы во
многих случаях могут быть преобразованы в простейшие или в
такие, которые поддаются более простому расчету, не требующему
совместного решения уравнений. Перестановка стержней состоит
в удалении одних стержней — заменяемых и введении в систему
других стержней — заменяющих. Так как в заданной сложной сис­
теме заменяющие стержни отсутствуют, то дополнительными усло­
виями для определения усилий в ее стержнях служат уравнения,
выражающие равенство нулю усилий в каждом из заменяющих
стержней.
Способ расчета сложной системы, основанный на преобразовании
ее перестановкой стержней в более простую, носит название с п oc о б а з а м e н ы с т e p ж н e й. Поясним его сущность на при­
мере. Пусть требуется определить усилия в ферме, изображенной
на рис. 4.39, а, находящейся поддействиемлюбой внешней нагрузки,
например силы P , приложенной к узлу 5. Анализируя геометриче­
скую структуру фермы, видим, что эта ферма не принадлежит к
классу простейших. Число стержней, сходящихся в каждом из ее
узлов, равно трем, а потому определение усилий способом проекций
H8
связано с совместным решением уравнений. Применение снособа
моментной точки также не позволит здесь разделить неизвестные по
уравнениям. Поэтому преобразуем заданную ферму в простейшую,
заменив какой-либо из ее стержней другим, поставленным в новом
месте. Один из возможных вариантов преобразования (заменой
стержня 6—3 стержнем 1—5) изображен на рис. 4.39, б. Геометри­
ческая неизменяемость полученной таким образом системы очевид­
на, так как она образована из шарнирного треугольника 1—5—6,
к которому последовательно присоединены узлы 2, 4 и <?, причем
каждый с помощью двух стержней, не лежащих на одной прямой.
Систему, полученную в результате такого преобразования,
условимся называТь преобразованной или заменяющей. Усилие
в любом из ее стержней может быть найдено достаточно просто (на­
пример, способом вырезания узлов) без совместного решения сис­
темы уравнений.
Обозначим X усилие, возникающее от силы P в заменяемом
стержне 6—3 заданной сложной фермы. Приложим силы X к узлам
3 и 6 преобразованной системы (см. рис. 4.39, б) по направлению
заменяемого стержня (заменяемый стержень считаем при этом ра­
ботающим на растяжение).
Имеющееся различие между усилиями в элементах преобразо­
ванной и заданной систем исчезнет, если силы X будут подобраны
так, что усилие в заменяющем стержне 1—5 преобразованной сис­
темы от совместного действия внешней нагрузки P и сил X будет
равно нулю. При этом усилия во всех стержнях преобразованной
фермы будуттакиеже, как и в заданной. В самом деле, преобразо­
ванная система имеет те же узлы, что и заданная, и ту же внешнюю
нагрузку. Вместо заменяемого стержня в преобразованной системе
вдоль его оси действуют приложенные к узлам 3 и 6 две взаимно
противоположные силы X, представляющие собой усилие в стержне
3—6 заданной фермы. Если к тому же усилие в заменяющем стерж­
не 1— 5 окажется равным нулю, то преобразованная система дей­
ствительно ничем не будет отличаться от заданной.
На основании принципа независимости действия сил усилие
в любом элементе i преобразованной системы (а следовательно, и
заданной системы) может быть найдено по формуле
N ^ N ip+ N ixX t
(4.2)
где N ip-— усилиев преобразованной системе от заданной нагрузки
P'y N ix— то же, от сил X, равных единице.
По этой же формуле определится и усилие в заменяющем стерж­
не, которое должно быть равно нулю, так как в заданной системе
заменяющего стержня нет. Обозначив это усилие N e>получим
N e = N ep+ N exX = 0,
откуда
X = — N ep/ N ex.
(4.3)
По найденному значению X с помощью формулы (4.2) можно
определить усилия во всех стержнях заданной системы.
119
В более сложных случаях приходится производить замену двух,
а иногда и большего количества стержней. В таких случаях способ
замены стержней не освобождает от решения совместной системы
уравнений.
Суммарные усилия в заменяющих стержнях и в этих случаях
равны нулю, а потому должны удовлетворяться следующие урав­
нения:
N ! = N 1/? + N г1Х г 4- N 12Х 2+ N 13X 3+ .. . = 0;
N 2- N 2p + а д + N22X 2+ NJ 3 X 3+ . .. = 0;
(4.4)
N з = N гр + N 3iX x 4* N 32X 24- N 33X 34 - . . . = 0, где N u N 2>N a, . . . — суммарные усилия соответственно в первом,
втором, третьем и т. д. заменяющих стержнях; X lf X>, Х 3, . . . —
искомые усилия в заменяемых стержнях, определяемые совместным
решением этих уравнений;Мц, iVl2, Л^3, . . . — усилия в первом
заменяющем стержне соответственно от Х х= 1, Х 2= 1, Х 3= 1, . . . ;
^ 2i> ^ 22> ^гз» • • • — усилия во втором заменяющем стержне и т. д.
Решением системы уравнений (4.4) и определим значения Х и
X * Х 3, . . .
Положение заменяющего стержня в сложной ферме не всегда
ясно, но его можно найти следующимобразом. Устранивкакой-либо
стержень из сложной фермы, следует затем последовательно отбра­
сывать в ней узлы, присоединенные (в оставшейся части фермы)
двумя стержнями каждый; такое отбрасывание не оказывает влия­
ния на неизменяемость остающейся части. Отбрасывание узлов
продолжается до тех пор, пока не обнаружится стержень, не имею­
щий достаточной связи с остающейся частью системы; стержень,
необходимый для закрепления его, и будет заменяющим. Если полу­
ченная таким образом ферма все же не будет принадлежать по своей
геометрической структуре к классу простейших, то из нее следует
т
еще раз устранить какой-либо
^
^
стержень и отбрасывать узлы,
присоединенные двумя стерж­
нями, до тех пор, пока опять
не обнаружится стер^кень, не
имеющий достаточной связи с
остающейся частью фермы; в
результате будет найдено место
и для второго заменяющего
стержня. Так следует посту­
пать до тех пор, пока не бу­
дет найдено место для последРис. 4.40
него заменяющего стержня.
Пример. Определить способом
замены стержней усилия в элемен­
тах сложиой фермы, изображенной на рис. 4.40, а, если sin a = 0 ,6 и sin ^=0,8.
P e ш e н и e. Преобразуем заданную сложную систему в простейшую заме­
ной стержня 3—6 стержнем J—5 (рис, 4.40, б). Усилие X в заменяемом стержне
120
3—6 определим из условияравенства нулюусилия в заменяющем стержне / - 5 :
*«=^+^*=0,
откуда
X = — Nibp Nisx'
Здесь A^i5p и Ni ьх— усилия в заменяющем стержне 1—5 соответственно от
нагрузки P и сил X = 1.
Усилия в остальных стержнях заданной системы определяются поформуле
A ri =
N {p + Wi x X ,
где Nfp и Nfx —усилия в стержне преобразованной системы соответственно
от нагрузки P и сил X = 1.
_
Определение усилий Njp и Njx удобно произвести способом вырезания
узлов. Применяя этот способ последовательно к узлам 3, 2, 4, 6, 5, легко
показать, что усилия от силы P в простейшей (преобразованной) ферме возникают
лишь в элементах 1—6, 5—6 и / —^; в остальных элементахэтойфермыусилия
от силы P равны нулю.
Полученные значения усилий N(p и N(x сведены в табл. 4.3. Графы 4 и 5
таблицы заполнены после определения усилия X в заменяемом стержне 3—6.
Значения, приведенные вграфе4, получены умножением значений графы 2
на величину X , а значения, приведенные в графе 5, — суммированием значений
граф 3 и 4.
T а б л и ц а 4.3
Номер стержня
Усилне от силы
2 — 3 или 4 — 3
1— 2 или 5 — 4
2—5 или 4— 1
1—6 или 5—6
1—5
Г! p и м e ч а н н e.
X=l
5
“
б"
— 1
, 5
т 6
5
“ 7
7
~Я
Усилие от
силы X
Усилие от
заданной
нагрузки P
_.L15
_ p^
' 14
0
Q
+ “ Р
/
0
15 „
------p
14
45
4-— P
'56
, 3 п
+ 8 Р
0
5 ^
+ т р
3 _
____ p
8
Усилие в заменяемом стержне
Полное
усилие
в сложной
форме
15 „
74
J_J* P
1 7
15p n
----14
л _ 10
_ p^
1 7
0
3—6 .
§ 4.4. РАСПРЕДЕЛЕНИЕ УСИЛИЙ В ЭЛЕМЕНТАХ ФЕРМ
РАЗЛИЧНОГО ОЧЕРТАНИЯ
Результаты расчета различных ферм, приведенные в § 4.2, по­
зволяют сделать некоторые выводы о влиянии расположения стерж­
ней (у опор, в середине пролета и т. д.) на усилия в них. Так, на­
пример, из эпюр, изображенных на рис. 4.32 и 4.33, видно, что
усилия в поясах треугольной фермы убывают, а в ферме с парал­
лельными поясами возрастают от опор к середине пролета. В насто­
ящем параграфе этот вопрос рассмотрен в общей форме и исследо­
ваны фермы наиболее характерного очертания, а именно: ферма
121
с параллельными поясами (рис. 4.41), ферма с параболическим очер­
танием верхнего пояса (рис. 4.42) и ферма треугольного очертания
(рис. 4.43). Установим для каждой из них закон изменения усилий
в поясах и решетке от нагрузки интенсивностью q^ равномерно
^
распределенной по пролету и
передающейся на нижние уз­
лы фермы. Передача распре­
деленной нагрузки в узлы
осуществляется с помощью
продольных
однопролетных
балочек 1 длиной, равной раз­
меру d панели фермы. Рас­
Рис. 4.41
пределенная нагрузка дей­
ствует непосредственно на эти
балочки. Каждая балочка пе­
редает на узлы фермы, распо­
ложенные под ее концами, со­
средоточенные силы, равные
qd/2. Таким образом, на край­
ние узлы фермы от распреде­
ленной нагрузки действуют
силы P=qd/2, а на промежу­
точные узлы — вдвое большие,
так как на такие узлы опи­
раются по две продольные ба­
лочки, перекрывающие сосед­
ние панели фермы.
Будем нумеровать узлы
нижнего пояса фермы слева
направо. Крайний левый (опорный) узел назовем нулевым; затем
идут первый, второй и т. д. узлы.
Рассмотрим ферму, изображенную на рис. 4.44, и составим фор­
мулы для определения усилий в ее элементах.
Для определения усилий Un в элементе нижнего пояса, соеди­
няющем узлы n— 1 и n , сделаемразрез I — I (рис. 4.44) и рассмотрим
условие равновесия левой части фермы (рис. 4.45):
% M k ^ ( n - l ) d - q ( n - l ) d {^ = ^ - U nhn^ = 0,
откуда
jj
d*(n-l),
. 1ч
UnZ=q 2hn_t ( m - n + l ) .
Для определения усилия Оп_ 1 в элементе верхнего пояса
спроецируем все силы, действующие на отсеченную левую часть
фермы (рис. 4.45), на горизонтальную ось x:
2 * = < V i c o s c ^ - j + ^ = O,
1
Более подробно схема осуществления узловой передачи нагрузки рассмот­
рена в § 2.5.
122
откуда
0„
-1
=
U„
cosa„_i = — <7ofc^*L*i*—:
^2ftrt_iCosart_x (m — n + !)•
Усилие 0 пУ очевидно, будет равно
0„ =
0 Ь —(m— n).
2hn cos a n x
7
Рис. 4.44
Для определения усилия Vn_i в стойке фермы спроецируем
все силы (рис. 4.45) на вертикальную ось Y:
2 ^ ——^ — q(rt— 1) d — q ^y -\- On^ 1s m a n_1 ^r Vn_ 1— 0,
откуда
A2
vV n - 1 = _q
m
%
№
Ь пм
I q,md
Ю
A1 ”-'
Un
Рис. 4.45
Усилие Vn> очевидно, будет равно
F „ = -f[m -2 rt-l-^ p h g a „ ].
Д ля определения усилия Dn в раскосе вырежем сечением
/ / —/ / узел n (рис. 4.44 и 4.46) и спроецируем все силы, дейст­
вующие на него, на ось Y:
2 Y = V„ + Dn sinp„— q d = 0 ,
123
откуда
e
. - - ^ - * i c - ^ t - * + i - ^ *
“ •]•
Итак, усилия в элементах фермы, изображенной на рис. 4.44,
определяются формулами:
V n = **$rY
о
V. - - f
„ =
[« I-
- ^
(ю -я + 1 );
- (и - , ;
2 л - 1 - 2 t < f p > tg « . ] ;
« . = T A r h - ^ + i - ^ H Используем их для исследования законов распределения уси­
лий в фермах с параллельными поясами, параболическим очертанием верхнего пояса и фермы треугольного очертания.
Если в полученных формулах принять высоту фермы hn постоян­
ной и ап равным нулю, то получим формулы для определения уси­
лий в ферме с параллельными поясами (см. рис. 4.41):
Un = 4dH21 ~ 1)( " 1 - П + \ У ,
° n = — ^ i r (m -ny,
V„ = - ^ ( m - 2 n - l ) ;
Dn = 2 & b ( m ~ * n + 1)Полученные формулы для фермы с параллельными поясами по­
казывают, что усилия в поясах возрастают по закону параболы от
опор к ее середине; усилия же в стойках и раскосах убывают по
закону прямой (n в первой степени) от опор к середине фермы.
Если узлы верхнего пояса фермы расположить на параболе и,
следовательно, высоту стоек назначать в соответствии с уравнением
К = ~£г(т— п)п,
то усилия в поясах такой фермы (см. рис. 4.44) можно будет
определить по формулам:
п _ qd * (n -\ ) ,
1 \ _qd* (ti" i) (т — п~^ 1) m2 ___ qd2m2 __ql2 t
Un~
2ft„_! {
'
2 ‘4h[m — (n— 1)] (n — 1)
8/z ~ 8 Л ’
n _______ q d 4
,
v
gd2n (m n) m2 _
n
2hn cos a n '
'
2-4 h (m — ti) n cos а„
_
. qd2tn 2
Sh cos a n
_
12
^ Sh cos а„
Полученные формулы для Un и Оп показывают, что усилия во
всех элементах нижнего пояса фермы параболического очертания
постоянны и равны ql2/(8h)\ усилия же в элементах верхнего пояса
124
меняются в зависимости от cos ап, т. e. они убывают от опор к с&
редине фермы.
Усилия в раскосах фермы параболического очертания равны
нулю, а усилия в стойках, выполняющих в данномслучаерольподвесок, постоянны и равны qd. В
этом легко убедиться, если расх/
'п
смотреть условия равновесия лю­
бого узла нижнего пояса фермы,
On
например узла n (рис. 4.47).
К этим же результатам можно
ql2
прийти и с помощью формул, по­
U
&
п
^ t t
un 8h
лученных ранее для усилий Dn и
Vn в решетке фермы, изображенной
на рис. 4.44.
qi
Для фермы треугольного очер­
тания (см. рис. 4.43) высота стойки
Рис. 4.47
hn определяется по формуле
Ль
к n = ~m Для определения усилий в поясах и решетке такой фермы
получим следующие выражения:
_ q d * ( n - 1),_
2/T„_! {т
Un =
„ , ,ч
gd*(n-l)(m- n i - l ) m
п ^ 1> 4/i (n — 1)
qd-m (m — n + 1)
Wi
Q _
n
qd2n (m — n)
2hn cos а п
’
qd2n (m — n) m _
4hn cos a
nd (m— n)
h~n
s i
~~
2
—
_
nd(m
—n)m
■
2hn
2/i
md
fg an
• ^^^^—
° .-т £ Ь г f - * " + > - =
nd (m — n) m 2h_
m — 2n + 1
md
2hn
qd
2 sin P„
qd2 (m — n) m
4h cos a
’
= y ( r t + 1);
^ H 9 qdR ■(n — 1').
2 sin p„ v
Полученные формулы для фермы треугольного очертания пока­
зывают, что усилия в поясах убывают по закону прямой (n в первой
степени) от опор к середине фермы; усилия же в решетке — стойках
и раскосах — возрастают по линейному закону от опор к середине
фермы.
§ 4.5. ИССЛЕДОВАНИЕ НЕИЗМЕНЯЕМОСТИ ФЕРМ
1. Простейшие фермы
В § 1.2 при рассмотрении геометрической структуры стержне­
вых систем было указано, что фермы, имеющие во всех своих час­
тях минимально необходимое для обеспечения неизменяемости чис­
125
ло стержней, могут быть мгновенно изменяемыми. Такимобразом,
наличие необходимого числа стержней еще не обеспечивает геомет­
рической неизменяемости системы.
Мгновенная изменяемость систем может быть обнаружена в не­
которых случаях достаточно просто. Можно доказать, что в эле­
ментах мгновенно изменяемых систем при действии внешних сил
могут возникать бесконечно большие усилия или усилия неопреде­
ленной величины.
Одновременно можно доказать и обратное положение: если при
любой заданной нагрузке усилие в каждом элементе системы имеет
вполне определенное конечное значение, а при отсутствии нагрузки
(при так называемой нулевой нагрузке) усилия во всех элементах
равны нулю и такое (нулевое) решение является единственно воз­
можным, то система геометрически неизменяема. Основанный на
последнем признаке способ исследования мгновенной изменяемости
системы называется с п о с о б о м н у л e в о й н а г p у з к и.
Применяя способ нулевой нагрузки для исследования мгновен­
ной изменяемости, необходимо предварительно убедиться в том,
что система во всех своих частях имеет достаточное для ее неизме­
няемости число стержней. В противном случае применение этого
способа может привести к ошибочным заключениям. В самом деле,
если способ нулевой нагрузки применить к шарнирному четырех­
угольнику (рис. 4.48) и поочередно рассмотреть условия равновесия
его узлов, то усилия во всех его стержнях окажутся равными нулю;
тем не менее система геометрически изменяема.
Покажем справедливость высказанных выше общих положений
на частных примерах.
Рассмотрим диск, связанный с землей тремя стержнями, оси ко­
торых не пересекаются в одной точке (рис. 4.49, а). Такое соедине­
ние диска с землей является, как известно, геометрически неизме­
няемым.
Докажем, что при действии на диск нулевой нагрузки усилия
во всех стержнях равны нулю. Отбросим стержни и заменим их
влияние на диск реакциями R Ay R B и R c (рис. 4.49, б). Составим
уравнение моментов всех сил относительно точки Ог пересечения
реакций R A и R B:
R cr
а так как rczт^О, то R c =0.
126
c = 0,
Аналогично с помощью уравнений моментов относительно точек
0 2 и 0 3 (см. рис. 4.49, б) может быть доказано, что реакции Я А и
R B также имеют нулевые значения. Таким образом, действительно*,
при воздействии на геометрически неизменяемую систему нулевой
нагрузки усилия в ней равны
нулю.
Рассмотрим другую систе­
му, представляющую собой
диск, опирающийся на три
опорных стержня, оси кото­
Земля
рых пересекаются в общей
Рис. 4.50
точке 0 (рис. 4.50, а). Такое
соединение диска с землей, как
известно, является мгновенно изменяемым.
Отбросим опорные стержни и заменим их реакциями R A, R B и
Rc (рис. 4.50, б). Составив уравнение моментов относительно точки
О
2 - Mo= R ArA+ R BrB+ R crc = 0 ,
получим для реакций неопределенные значения, так как rA = r B=
= г с = 0 . Остальные два уравнения равновесия (например, урав­
нения проекций сил на оси x и у) также дадут неопределенные зна­
чения реакций, так как в эти два уравнения войдут три неизвестные
реакции.
Таким образом, усилия в мгновенно изменяемой системе при
действии на нее нулевой нагрузки могут иметь неопределенные
значения.
К тому же результату можно прийти, задавшись произвольным
значением одной из реакций и разложив ее на две составляющие по
направлениям двух других опорных стержней. В результате такого
разложения будут полученыостальныедве реакции, уравновешиваю­
щие первую и зависящие от ее числовой величины; следовательно,
реакции могут иметь бесчисленное множество значений, а это яв­
ляется статическим признаком мгновенной изменяемости рассмат­
риваемой системы.
Мгновенную изменяемость этой же системы можно установить
и следующим образом. Отбросив стержни и заменив их реакциями,
составим уравнение моментов всех сил относительно точки 0 (см.
рис. 4.50, б). Это уравнение при действии на диск внешней силы
Р 9 имеющей плечо r относительно точки О, будет иметь вид
% M 0= R A. 0 + R B. 0+ R c - 0+Ргф 0.
Здесь произведение Pr явно не равно нулю, т. e. 2 М о# 0 ;
следовательно, рассматриваемый диск, опирающийся на три стерж­
ня, оси которых пересекаются в одной точке (см. рис. 4.50, а), не
находится в равновесии; он должен повернуться вокруг точки 0
на бесконечно малый угол. Следовательно, рассматриваемая систе­
ма мгновенно изменяема.
После поворота системы на бесконечно малый угол оси опорных
127
стержней уже не будут пересекаться в одной общей точке, и их
реакции смогут уравновесить внешнюю нагрузку. При этом усилия
в стержнях должны будут удовлетворять условию
2
^
0=
^ A r A Jr R B r В ^ R
Cr С Л ~ Р г ~
0,
из которого, а также из равенства нулю проекций всех сил на оси
x и у следует, что усилия в каждом из стержней равны бесконеч­
ности, так как плечи гАу гв и гс
бесконечно малы.
Таким образом, в мгновенно
изменяемой системе при действии
внешней нагрузки могут возникать
бесконечно большие усилия. Поэто­
му применение таких систем недо­
пустимо.
Рис. 4.51
В качестве еще одного приме­
ра рассмотрим геометрически не­
изменяемую систему, изображенную на рис. 4.51, а. Она представ­
ляет собой диск, связанный с землей тремя опорными стержнями,
к которому присоединен узел с с помощью стержней ас и bc, не ле­
жащих на одной прямой.
Приложим к узлу с силу P и определим усилия в стержнях ас
и bc,
Для этого вырежем узел с (рис. 4.51, б) и рассмотрим условия
его равновесия:
j j ^ X = — N cacos a+ jV ^cos a = 0 ;
2 ^ = jV ^ s i n a+ jV cbsin e e -P = 0 .
Решив эти уравнения, получим
N ca= N cb=PI{2 sin a).
Из полученной формулы следует, что если углы a наклона стерж­
ней ас и bc уменьшить до нуля, то усилия N ca и N cb возрастут до
бесконечности. Это является признаком мгновенно изменяемой сис­
темы. В самом деле, тогда узел с будет
присоединен к узлам а и b двумя стерж­
нями ас и bc, лежащими на одной пря­
мой, а такая система, как известно,
мгновенно изменяема.
Рассмотрим еще один признак мгно­
венной изменяемости на примере системы,
изображенной на рис. 4.52. Составляя
Рис. 4.52
поочередно условия равновесия для уз­
лов с и d этой системы, имеющей число
стержней, удовлетворяющее условию S=^2K—3, приходим к проти­
воречивым результатам. Так, из уравнений равновесия узла с
следует, что усилие в стержне cd равно нулю; в то же время усилие
в стержне cd, определяемое из уравнений равновесия узла d, будет
128
равно + P . Противоречивость полученных результатов для такой
системы является признаком ее мгновенной изменяемости.
Итак, статическими признаками мгновенной изменяемости сис­
темы, имеющей достаточное для
геометрической неизменяемости
число связей, являются:
1) возникновение в отдель­
ных стержнях системы бесконеч­
но больших усилий;
2) неопределенность усилий в
стержнях системы и, в частности,
получение противоречивых ре­
зультатов для усилия в одном и
том же стержне, определяемого
из условий равновесия разных
частей или узлов системы.
На рис. 4.53, a — e приведе­
ны системы, для которых чита­
телю рекомендуется с помощью
способа нулевой нагрузки решить
вопрос об их мгновенной изме­
няемости. При этом необходимо помнить, что этот способ нельзя
применять, если система не имеет во всех своих частях достаточ­
ного для ее неизменяемости числа стержней и, в частности, если
для нее S < 2 K —3.
2. Сложные фермы
Рассмотрим сначала случай, когда для преобразования заданной
сложной системы (фермы) в простейшую требуется замена лишь
одного стержня.
Преобразованная (заменяющая) система является простейшей и,
следовательно, геометрически неизменяемой; поэтому величина
N ep (усилия в заменяющем стержне от внешней нагрузки_Р) имеет
определенное конечное значение. Поэтому при усилии N ex (в за­
меняющем стержне от сил X = 1), не равном нулю, усилие в заменяе­
мом стержне, как это следует из формулы (4.3),
X = - N j N ex
может быть только определенным и конечным. Следовательно, н
усилия во всех элементах заданной системы будут вполне опреде­
ленными и конечными, а это, как известно, является статическим
признаком геометрической неизменяемости системы.
Если же N ex= 0, то или X = —N ep/N ex= z to o , или X = 0 /0 , т. e.
X в этом случае имеет значение или бесконечно большое, или не­
определенное.
Таким образом, с помощью выражения
X = - N j N ex
5 № 2418
129
можно исследовать неизменяемость системы: при N ex^ 0 она гео­
метрически неизменяема, а при N ex= 0 мгновенно изменяема.
Итак, если в заменяющем стержне преобразованной системы
усилие от единичных сил X , направленных вдоль заменяемого
стержня, не равно нулю, то заданная система геометрически не­
изменяема, а если оно равно нулю, то система мгновенно изменяема.
Заданные системы
Лреодразованные системы
4
*
л
~
+
+
3
г
п
Рис. 4.54
На рис. 4.54, а — г и 4.55, а — в приведены заданные и преоб­
разованные системы, для которых установлено равенство или не­
равенство нулю усилия N ex в заменяющем стержне. Читателю пред­
лагается проверить это и, следовательно, решить вопрос о геомет­
рической неизменяемости каждой заданной системы. Заменяющий
130
стержень всюду изображен штриховой линией, усилие в нем от сил
-X = l обозначено N e.
Частично поставленные знаки плюс и минус соответственно
указывают на растяжение и сжатие стержней от действия на пре­
образованную систему единичных сил X. Учитывая эти знаки (чи­
тателю предлагается их проверить) и рассматривая условия равно­
весия узла, обозначенного буквой K> или пользуясь тем или иным
разрезом, можно в каждом отдельном случае установить равенство
или неравенство усилия в заменяющем стержне.
Заданные системы
Лрео$разо8анные системы
^ v ^ V ^ ^ V ^ ^
^
1
£
.
хч
.
7 ^
/7
>^
'‘^ ^^^^^^^Т^У^У^^^^^^^уР.
Ш Ш Ш Ш ш Ш Ш ^Ш ^
1
$
;
К
^ 5 ч ^ ^
ът
?J^
Рис. 4.55
Рассмотрим для примера систему, изображенную на рис. 4.54, а.
Из условия равновесия узла 1 преобразованной системы очевидно,
что стержень 1—2 растянут, а усилие в стержне 1— 6 равно нулю.
Далее из условия равновесия узла 2 следует, что стержень 2— 3
растянут, а стержень 2—4 сжат. Из условия равновесия узла 4
(равенства нулю суммы проекций сил на вертикальную ось) уста­
навливаем, что стержень 4— К растянут (так как стержень 2— 4
сжат). Рассматривая затем проекцию на горизонтальную ось сил,
действующих на узел K> видим, что усилие в заменяющем стержне
К — 6 сжимающее, т. e. не равно нулю. К тому же результату мож5*
131
но прийти, рассмотрев после второго узла равновесие третьего узла,
а затем шестого.
Читателю предлагается убедиться в том, что при a = p система,
изображенная на рис. 4.54, в, будет мгновенно изменяемой.
Д ля доказательства равенства нулю усилия N e в системе, изо­
браженной на рис. 4.54, г, рекомендуется воспользоваться пооче­
редно двумя разрезами: n — n и m — m.
Для доказательства равенства нулю усилия N e в системе, изо­
браженной на рис. 4.55, б> следует, рассмотрев условия равновесия
верхних ее узлов, воспользоваться
затем разрезом n — п.
Читателю предлагается самос­
тоятельно исследовать геометриче­
скую неизменяемость систем, при­
веденных на рис. 4 .5 6 ,a — з.
Рассмотрим теперь случай, ког­
да для преобразования заданной
сложной системы (фермы) в прос­
тейшую требуется замена несколь­
ких стержней. В этом случае
уравнения, отрицающие различие
[Р
а
Стержни J
fel
Шь
... **. ... ^s*
s
^_
__,J
ситтрии
и
Шириир
"Диски
^ ^
Cmepmu
Рис. 4.56
между заданной фермой и преобразованной, имеют вид (4.4):
N г = N 1р 4- N iiXi + N 12Х2 + N 13Х 3 + . . . = 0;
N 2= N 2p 4 - N 21Х г + N 22Х2 4- N 23Х 3’4 - . . . s=i 0;
Л^3- N sp + N ^ X , + N 32X 2 +~N33X 3+ . . . = 0
и т. д.
Значения усилий Xi, Х 2, . . . и т. д., возникающих в заменяе­
мых стержнях, будут вполне определенными и конечными и, сле132
довательно, заданнаяферма будетгеометрически неизменяемой,если
детерминант этой системы уравнений будет отличным от нуля:
Nu
D = Nй
N 3i
tfi,
N^
N 3i
N 13
N 2з Ф 0
N33
Если же D = 0 , то заданная ферма мгновенно изменяема.
Читателю предлагается убедиться в том, что система, изобра­
женная на рис. 4.57, состоящая из шести дисков, пяти стержней и
четырех участков, геомет­
рически неизменяема, а
усилие в стержне a b — рас­
тягивающее и равно 4P.
(При числе участков, рав­
ном пу усилие в стержне
ab равно rtP.)
§ 4.6. ЛИНИИ ВЛИЯНИЯ
УСИЛИЙ В СТЕРЖНЯХ
ПРОСТЕЙШИХ ФЕРМ
Передача нагрузки на
ферму производится в уз­
лах-шарнирах;
следова­
тельно, здесь имеет место
случай узловой передачи
нагрузки. Поэтому все ска­
занное в §2.5 о построении
линий влияния при узло­
вой передаче нагрузки на
.
.
\Передоття пряпщ
балку относится и к фер­
Линия влияния R n
мам.
■\~Лраоая прямоЙ\
uncc
Аналогично
способам
определения усилий в фер­
sin ct
мах при неподвижной на­
грузке (см. §4.2) различа­
ются следующие приемы
построения линий влияния
для ферм: 1) способ момент­
'праШ п
р
я
м
а
я
ной точки, 2) способ про­
Лередаточная лрятЯ
екций.
Способ моментной точ­
Рис. 4.58
ки. Построим линию влия­
ния усилия в стержне 7— 9 фермы, изображенной на рис. 4.58, а.
Проведем разрез / —/, пересекающий три стержня.
Когда груз P = 1 находится правее узла 8 (движение груза про­
исходит по верхнему поясу фермы), удобнее рассматривать равно133
весйе левой отсеченной части фермы (рис. 4.58, б), так как на нее
в этом случае действует меньше сил, чем на правую.
Применяя для определения усилия U79 способ моментной точки,
составим уравнение суммы моментов всех сил, действующих на
левую часть фермы, относительно точки 6:
% M 9= R A -3d— U19h=Q9
откуда
U79= 3 R Ad/h.
Таким образом, при положении груза P = 1 на правой части фер­
мы усилие U 79 равно левой опорной реакции R Aj умноженной на
постоянный коэффициент 3d/h. Одновременно отмечаем, что 3R Ad
численно равно изгибающему моменту М£ в простой балке для
сечения с абсциссой, равной абсциссе моментной точки 6.
Линия влияния усилия U 7э (когда груз Р — 1 расположен правее
узла 8) представляет собой линию влияния опорной реакции R A
с ординатами, умноженными на 3d/h. Поэтому для ее построения
отложим на оси отсчета вверх на левой опорной вертикали орди­
нату, равную 3d/hj и соединим прямой ее вершину с нулевой точкой
на правой опорной вертикали; в результате получим прямую а±Ь
(рис. 4.58, г).
На построенную таким образом прямую, называемую правой
прямой, сносим правые узлы фермы §, 10, 12, 14 и 16. Заштриховы­
ваем линию влияния на участке между узлами 8 и 16.
При грузе P = 1, расположенном левее узла 6, усилие в стержне
7— 9 может быть найдено из уравнения равновесия для правой
части фермы (рис. 4.58, в):
% M B= — R B-5d+ U nh = 0 9
откуда
U n = 5 R Bd/h9
т. e. усилие в стержне 7— 9 равно правой опорной реакции R B,
увеличенной в 5d/h раз. Произведение 5R Bd численно равно изги­
бающему моменту Ml простой балки для сечения с абсциссой, рав­
ной абсциссе моментной точки 6.
Линия влияния U 19 для груза, расположенного левее узла 6У
строится следующим образом: от оси отсчета вверх на правой опор­
ной вертикали откладывается ордината, равная 5d/h, после чего ее
вершина соединяется с нулевой точкой на левой опорной вертикали
(прямая Ь±а на рис. 4.58, г). Построенная таким образом прямая
носит название левой прямой; на эту прямую сносятся левые узлы
фермы Д 2, 4 и 6. Заштриховываем линию влияния на участке между
узлами 1 и 6.
Так как усилие U79 определяется формулой
и ^ м у к
то его линия влияния может быть получена из линии влияния из­
гибающего момента простой балки (для сечения, соответствующего
вертикали, проходящей через моментную точку в ферме) умножени­
134
ем всех ее ординат на коэффициент 1/h. Поэтому прямые abi и ахЬ
(левая и правая), соединяющие вершины опорных ординат с нуле­
выми точками на противоположных опорах, пересекаются друг
с другом под моментной точкой (в точке с). Передаточная прямая,
соответствующая движению груза P = 1 между узлами 6 и 8 рассе­
ченной панели, в данном случае совпадает с продолжением правой
прямой линии влияния.
Рассмотренный пример позволяет сформулировать порядок по­
строения линий влияния усилий для элементов балочной фермы на
двух опорах способом моментной точки:
1) при построении правой прямой следует отложить от оси от­
счета на левой опорной вертикали (вверх или вниз, в зависимости
от знака) ординату a/h, где а — расстояние от моментной точки до
левой опорной вертикали, h — плечо определяемого усилия отно­
сительно моментной точки;
2) вершину опорной ординаты соединить с нулевой точкой на
правой опорной вертикали;
3) на построенную таким образом правую прямую снести пра­
вые узлы фермы;
4) найти на правой прямой точку пересечения ее с левой пря­
мой, для чего моментную точку снести на правую прямую;
5) точку пересечения правой и левой прямых соединить с нуле­
вой точкой на левой опорной вертикали;
6) на построенную таким образом левую прямую снести левые
узлы фермы;
7) вершины узловых ординат рассеченной панели соединить
передаточной прямой.
Можно начинать построение линии влияния и с левой прямой.
В этом случае на правой опорной вертикали откладывается от оси
отсчета (вверх или вниз, в зависимости от знака) ордината b/h, где
b — расстояние от моментной точки до правой опорной вертикали и
h — плечо определяемого усилия относительно моментной точки.
Затем через вершину отложенной таким образом ординаты и нуле­
вую точку на левой опорной вертикали проводится левая прямая,
после чего строятся правая и передаточная прямые.
Способ проекций. Построим линию влияния усилия в раскосе
6— 9 фермы, изображенной на рис. 4.58, а.
Когда груз P = 1 расположен между узлами 8 и 16 (движение по
верхнему поясу), рассматриваем равновесие левой отсеченной
части фермы (рис. 4.58, б). Составим уравнение проекцийвсех сил
на вертикальную ось:
% Y = R A—D 69sin a = 0 ,
откуда
D 69= R A/sin a.
При грузе, расположенном между узлами 1 и 6У рассматриваем
условие равновесия правой части фермы (рис. 4.58, в). Спроециро­
вав все силы на вертикальную ось, получим
^ Y = R s + D ^ s i n a==0,
135
откуда
D 69= —R B/sin a .
Формулы для усилия D 69 показывают, что пока груз расположен
на правой части фермы, линия влияния D G9 может быть получена
умножением ординат линии влияния опорной реакции R A на по­
стоянный коэффициент l/sin а; когда же груз P = l находитсд в пре­
делах левой части фермы, усилие D 69 равняется опорной реакции
R Bt умноженной на (— l/sin ос).
Для построения правой прямой откладываем от оси отсчета вверх
на левой опорной вертикали ординату l/sin а и соединяем ее вер­
шину с нулевой точкой правой опорной вертикали (прямая аф на
рис. 4.58, д). На построенную таким образом правую прямую сно­
сим правые узлы: 8, 10, 12, 14 и 16,
Для построения левой прямой от оси отсчета на правой опорной
вертикали откладываем вниз ординату l/sin a, вершину которой
соединяем с нулевой точкой левой опорной вертикали. На построен­
ную левую прямую (прямая аЬх на рис. 4.58, 5) сносим левые узлы:
1У 2, 4 и 6.
Передаточная прямая соединяет вершины узловых ординат рас­
сеченной панели.
Заметим, что и в этом случае правая прямая пересекается с левой
под моментной точкой. В самом деле, моментная точка для усилия
D 69 находится в бесконечности; там же пересекаются правая и ле­
вая прямые, параллельные между собой.
Линия влияния усилия D 69 имеет участки с положительными и
отрицательными ординатами. Следовательно, стержень 6— 9 при
движении груза по ферме может быть как сжат, так и растянут.
Построим теперь линию влияния усилия в стойке 6—7 (рис.
4.58, а). В этом случае способ моментной точки неприменим,
так как приходится рассекать ферму сечением, в которое попадают
четыре стержня (сечение I I — I I или I I I —III).
Лучше всего здесь воспользоваться способом вырезания узлов
(рис. 4.58, e). Вырезав узел 7, составим для него уравнение равнове­
сия в виде суммы проекций всех сил на вертикальную ось:
^ Y = V „ + U lbs in p = 0 ,
откуда
^76 = -^7 5 sin р.
Так как груз P = l к узлу 7 непосредственно не прикладывается
(он движется по верху фермы), то полученная зависимость между
усилиями К76 и U 75 сохраняется при любом положении груза в пре­
делах пролета фермы. Поэтому линия влияния К76 может быть по­
лучена из линии влияния LJ75 умножением всех ее ординат на
(—sin p).
Но усилие U n5 пока неизвестно; для определения его спроеци­
руем силы, действующие на узел 7, на горизонтальную ось:
2 X = — f / 75cos
136
f> + U ^
0,
откуда
U 75— U 79/COS P j
поэтому
^76=—^75sin p = —
р.
Этот результат можнобыло получить и непосредственно из урав­
нения проекций сил, действующих на узел, на прямую, перпенди­
кулярную элементу 7—5.
Таким образом, линия влияния К76 может быть получена из
построенной ранее способом моментной точки линии влияния U7*
умножением всех ее ординат
на (—tg p). Построенная та­
ким образом линия влияния
Vie изображена на рис. 4.58,ж.
Построим линию влияния
для стойки 8— 9 (рис. 4.59, а).
Здесь так же, как и в преды­
дущем случае, нельзя провес­
ти разрез, пересекающий толь­
ко три стержня. Поэтому вос­
пользуемся способом выреза­
ния узлов.
Вырезав верхний узел 8
(рис. 4.59, а) и рассмотрев его
равновесие, получим:
1) при нагрузке в любом
узле, кроме 8 (рис. 4.59, б),
S ^ = - ^ ,= 0 ;
2) при нагрузке в узле 8 (рис. 4.59, в)
% Y = - V 89- P = 0 ,
откуда
V n= -P = -1.
Следовательно, когда груз P = 1 приложен в узлах /, 2, 4, 6
или 10, 12, 14, 16, усилие F89= 0; когда же груз P = l приложен в
узле 8, то V89= — 1. Найдя ординаты в узловых точках и соединив
вершины их прямыми, получим линию влияния V89 (рис. 4.59, г).
Она имеет вид треугольника с наибольшей ординатой, равной еди­
нице. Отрицательный ее знак указывает на то, что стойка 8—9 ра­
ботает только на сжатие.
Пример 1. Построить линии влияния усилий в элементах 7—8 и 7—9 фермы,
изображенной на рис. 4.60, а.
P e ш e н и e. Построим линию влияния усилия t/79. Проведем разрез k — k
и рассмотрим равновесие левой отсечеиной части фермы (рис* 4,60, б) при грузе
P = 1 , расположенном справа от разреза:
2M8=RA»3d—U79h=0t
откуда
Un=RA'3d/h=RA'3-3l4=2,2bRA.
137
Для построения правой прямой лннии влияния усилия t/79 откладываем от
оси отсчета на левой опорной вертикали ординату, равную 2,25, и соединяем ее
вершину с нулевой точкой на правой опорной вертикали (рис. 4.60, в). На по­
строенную таким образом прямую сносим правые узлы фермы. Левую прямую
строим, используя то положе­
ние, что она должна пройти че­
15 18
рез нулевую точку левой опоры
и пересечься с правой прямой
под моментной точкой 8.
Линия влияния усилия и п
имеет вид треугольника с вер­
шиной под моментной точкой.
Построим линию влияния
усилия V78. Рассечем ферму се­
чением rt — n и составим для
левой части фермы (рис. 4.60, г)
уравнение проекций сил на вер­
тикальную ось, предполагая, что
груз P = 1 находится справа от
разрезанной панели:
2 Y = R A+ V 78= 0 ,
откуда
У78=-ЯЛ.
fiuHUfr длияния vJesds поЬещ)
ШШЩШесЫ™
ПрвШ Арямм
Когда груз Р— 1 находится
слева от разрезанной панели,
уравнение равновесия правой
части фермы имеет вид
откуда
2F=tfs-V ,8=0,
Vn = R B.
Йния Олтт v7S(esdaлонизу)
Необходимо отметить, что
при движении нагрузки по ниж­
'прямоя^ф!— — f ------------ним узлам фермы первым пра­
вым узлом для усилия У78 явля­
tipmmwM ^ тя
ется узел 9, а при движении на­
грузки по верхним узлам — узел
Рис. 4.60
8У расположенный на одну па­
нель левее узла 9. Первым ле­
вым узлом при езде по низу фермы является узел 7, а при езде по верху — узел
6, расположенный на одну панель левее узла 7. Уравнения равновесия левой и
правой частей фермы не зависят от того, по верхним или нижним узлам фермы пере­
двигается нагрузка и, следовательно, в обоих этих случаях левые прямые (и пра­
вые прямые) линий влияния получаются одинаковыми. Линии же влияния, по­
строенные для езды по верху и езды по низу фермы, различаются расположением
лишь передаточной прямой, которая в одном случае смещена на одну панель по
отношению к передаточной прямой линии влияния, построенной для другого
случая.
На рис. 4.60, д, e построены две линии влияния, одна из которых соответствует
движению нагрузки по верхним узлам фермы, а другая — по нижним.
Пример2. Для фермы, изображенной на рис. 4.61, а, построить линию влия­
ния усилия D 56.
Р е ш е н и е . Проводим разрез n — rt. Располагаем груз Р— 1 справа от
разреза и составляем уравнение моментов сил, действующих на левую часть фер­
мы, относительно точки k пересечения направлений усилий в стержнях 5—7 и
4—6:
2Af ^ = —R Аа + /) 56г = 0,
I
i^ f^ ^ ^ p w ®
откуда
^ 5 6 = tf^ .
138
m
Здесь г _плечо усилия D56 относительно точки k; а — плечо опорной реакции
R A относительно той же точки k,
# ' Определим плечо а. Высота стойки 5—4 равна h2=32l9 м. Тангенс угла накло­
на элемента 5—7 к горизонту может быть найден по формуле
tga=
4~~i*2 — = 0,1481.
Линия Влияния Д
I
I
I
L
J ,m
Лрод,
^MQi
лрямая
Рис. 4.61
Из треугольника k — 5—4
fl+2rf=Ag/tga=32/(g-0,1481)=24 м,
следовательно*
a=24—2d=24—2*3=18 м*
Плечо г равно
r= (a+ 3 d ) sin fL
Отношение высоты стойки 5—4 к длине панели 4— 6 равно
tg p = (32/9)/3=32/27-1, 185.
По найденному тангенсу определяем с помощью таблиц натуральных триго­
нометрических величин угол p и его синус х:
p = 4 9 W ; sin p=0,764,
поэтому
r = (18+9) 0,764= 20,6 м.
Подставив значения а и г в формулу для D56, получим
£>56=18^/20,6= 0 ,8 7 4 ^ .
Для построения правой прямой линии влияния D56 откладываем под левой
опорой ординату, равную +0,874, и соединяем вершину ее с нулевой точкой правой
опоры (рис. 4.61,6).
Левую прямую строим, используя известное положение о том, что она пере­
секается с правой на вертикали, проходящей через моментную точку. Построенная
таким образом линия влияния D56 изображена на рис. 4.61, б.
**Можно не пользоваться таблицами, а определить sin p по формуле sin p =
:tg f>iV i+ tg f ,,
139
4
Пример 3. Построить линии влияния усилий 0 75, D56 и У76 в элементах тре­
угольной стропильной фермы, изображенной на рис. 4.62, а, при езде по низу
фермы.
JI и и и я в л.и я н и я у с и л и я 075. Разрезаем ферму сечением n — n и
рассматриваем условие равновесия левой ее части при грузе P = 1 , расположенУ
ном на правой части фермы:
2М6= Яд *3d+075r=0,
откуда
075= —3RAdir.
Линия длияния 015
Линия Влияния V$s
07Я
75
TiMi—D^r x=0,
76
L 3d 2$in cc
Линия влияния 0 75 имеет
вид треугольника с вершиной
под моментной точкой (рис,
4.62, б).
Л и н и я в л и я н и я у с ил и я D56. Воспользуемся раз­
резом rt — n и составим сумму
моментов всех сил, действующих
на левую часть фермы, относи­
тельно точки 1 (груз P = 1 рас­
полагаем справа от разреза
n — л):
Ливия Ъ т т я V7s
откуда
£*56—0,
т.е. при грузе P = 1 , расположепном справа от разреза, усиРис. 4.62
лие DM равно нулю. Правая
прямая линия влияния в этом
случае сливается с осью абсцисс,
Для построения левой прямой линии влияния рассмотрим условие равнове­
сия правой части фермы (при грузе P= 1, расположенном слева от разреза n — n):
s in K = r/3 d
откуда
2M*---- Rgl-D 56^i—0,
Dbr=—RBUrx,
т. e, усилие D56 равно правой опорной реакции RB, умноженной на ( -//rj) .
Построенная линия влияния усилия D56 изображена на рис. 4.62, в.
Л и и и я в л и я н и я у с и л и я У7б. Вырежем узел 7 (рис. 4.62, г) и#
спроецируем все силы, действующие на этот узел, на горизонтальную ось:
2 X = —0 75c o s a + 0 79c o s a ~ 0 ,
откуда
^75= ^79Спроецнруем те же силы на вертикальную ось:
TY = —V76—2075sina—0,
откуда
У76= —2075sin a.
Таким образом, линия влияния V76 может быть получена умножением всех
ординат линии влияния 0 75 на коэффициент (—2sin a). Линия влияния V7G имеет
вид треугольника (рис. 4.62,d) с наибольшей ординатой, равной единице.
Задача 1. Доказать правильность линий влияния, приведенных на рис. 4.63.
Задача 2. Для ферм, изображенных на рис. 4.64—4.68, требуется:
а) проверить правильность построениых линий влияния;
б) построить линии влияния для стержней, отмеченных черточками.
У к а з а н и я: а) При построении линий влияния У2 Для фермы, изобра­
женной на рис. 4.64, рекомендуется вырезать правый опорный узел и рассмотреть
140
Линия влияний Оц^ (езда поверху)
Щ а№ м*
Передаточная лрямая
{
Линия &лияния
лрямая
{
045 fat>O понизу)
П рШ япр^^ая
Передаточная прямая
_________
G
I
I
I
I
ЛинияВлиянияОмЬздапоВерху)
—
125 ^ ^ . ^ ^ - ^ w ^ f f ^ n ^
Л^Ооя лпямпо
Лрямия
г~ ~ 1—
125
L
—
»*" Mlll"IMKTJL^
)b25
Лини.я
(+j
—
}**
Рис. 4.63
Tf^Trm>>^
Линия влияния Of
Линия влияния V/
g U ^ ^ 1 \?^(sinoL7itqatcosa?)
Л иния блияния
юШш£ПE=>
Jd
Hj
0
©
sZnd
1И П и
"
“
-^^ , Линия Влитя Ъ
■
"— I Г|1111 птт
ПМЩЩЩ р ^л^ШПТМггптптггтт.
111
lX o r
*"******^-*^*4>,_^/ 4?{Лос
Рис. 4.64
его равновесие. При положении груза P = 1 в любом узле, кроме правого опорного,
усилие V2 определитсяиз уравнения V2= —Rs- При положении груза в правом
опорном узле К2= 0 .
б) При построении линий влияния для фермы, изображенной на рис. 4.65,
рекомендуется, перемещая груз P = 1 по консоли, рассматривать равновесие ее
правой отсеченной части. При этом становится совершенно очевидным, что когда
груз находится слева от разреза, усилие в рассматриваемом стержне равно нулю.
§ 4.7. ЛИНИИ ВЛИЯНИЯ УСИЛИЙ В СТЕРЖНЯХ СЛОЖНЫХ ФЕРМ
При расчете на подвижную нагрузку сложных ферм (ферм со
сложной геометрической структурой), в частности многопролетных
статически определимых ферм, для построения линий влияния мож­
но воспользоваться способом замены стержней.
142
Рис. 4.68
В качестве примера рассмотрим ферму, изображенную на
рис. 4.69, а. Построим для нее линию влияния реакции С промежу­
точной опоры при движении груза Р ~ 1 по верхнему поясу фермы.
Для этого преобразуем заданную ферму в простейшую, заменив
опорный стержень С вертикальным стержнем 6'—6 (рис. 4.69, б).
В шарнире 6' вместо опорного стержня С приложим силу X Ci яв­
ляющуюся реакцией опоры С.
Для определения реакции Х с составим уравнение, выражающее
условие равенства нулю усилия в заменяющем стержне 6'—6:
^ .= ^ .+ * Л .= о ,
о тк у д а
Хс =
N 6' е/N е' е.
143
ff
Здесь Nfi's — усилие в стержне 6' —6 фермы от силы P = 1, пере­
мещающейся по ее верхнему поясу; Мб'б—усилие в том же стержне
от реакции Х с = 1.
Линию влияния опорной реакции Х с можно получить, если
ординаты линии влияния усилия N 6'6 поделить на ЛГ6' 6, взятую
e обратным знаком.
Рис. 4.69
Для построения линии влияния усилия Л ^ 6 вырежем сечением
/ — / у з е л 5 ' (рИС> 4.70, а) и рассмотрим его равновесие (рис. 4.70, 6)i
2
^ X = —лг'в'в' cos а + N \ ' Г c o s a - 0,
^ = ^ 6' 5 ' s in a + iVg'^ s in a + iV ^ = 0,
откуда
iV6/6= — 2N^'b' sin a .
Подставив выражение N'6,6 в формулу, определяющую реак­
цию Х с, получим
Xg r= (2Ng/5/ sin a )/Af6/6.
Для построения линии влияния N ^ , разрежем ферму сечением
I I —I I (см. рис. 4.70, а) и, предполагая, что груз P = 1 нахо­
дится справа от разреза, составим для левой отсеченной части
фермы уравнение равновесия
2 M G= R A-5d— N 'G,5, d /s in a = 0 ,
откуда
N',g, = 5 ^ sin a ,
Следовательно, для построения правой прямой линии влияния
iVg'5' надо отложить от оси абсцисс вверх на левой опорной вер144
тикали отрезок 5 s in a = 5 ^ 2 /2 и соединить его вершину с нуле­
вой точкой на правой опорной вертикали. Левую прямую линии
влияния N l '5, строим, используя известное положение о том, что
она пересекается с правой на вертикали, проходящей через моментную точку (точку 6).
'J i)
!?
^<rt'V
^ S ^ 6 'f
<X:
Линия Влияния A*y
^P$fiae
fc f c j J $ ^ T l
4
Мния длияния К,
9)
Ж
3
^ z
J
Рис. 4.70
Построенная таким образом линия влияния Л^,5, для простейшей
фермы (рис. 4.70, а) изображена на рис. 4.70, г.
Определим теперь усилие N Q,Q, встерж н еб '— 6 о т с и л ы Х с = 1 ;
рассмотрим для этого условие равновесия узла 6' (рис. 4.70, в)\
УУ* = N e,6 ^- 1 ^r 2Af6/5, sin cc = 0,
где
М6,5, = — (5K2)/4(cM. рис. 4.70, г).
Следовательно,
A U = - 1 + 2 ( 5 / 2 / 4 ) { V 2/2) = 3/2,
поэтому
Хс = (2 N ’,5, sin a )/ЛГ„, = 2N“:j 3^
2/2) = (2 К 2 /З) tf;,5..
Следовательно, для получения линии влияния Хс надо все
ординаты линии влияния N'G,b, умножить накоэффициент 2 ^ 2 /3 .
Построенная таким образом линия влияния изображена на
рис. 4.70, д. С помощью линии влияния Х с легко могут быть
построены линии влияния других усилий.
145
§ 4.8. ШПРЕНГЕЛЬНЫЕ СИСТЕМЫ
Усилия в стержнях ферм способом моментной точки (см. § 4.2)
определяются по формуле
N = ± M lr,
где M — момент левых или правых сил относительно моментной
точки; r — плечо усилия N относительно этой точки.
м
Из этой формулы видно, что чем
' II м. mtу~г~<I ,M-yfc----<)....i N. . Ik-p больше r, тем меньше (при прочих
NW
^>
<if равных условиях) усилие N.
су
#х
Увеличение высоты фермы при­
^M
8Йwi водит к увеличению плеч r и умень­
шению усилий в ее элементах.
По конструктивным соображе­
ниям удобно располагать раскосы
фермы так, чтобы они составляли
?^% со стойками и поясами углы, близ­
кие к 45°. Поэтому увеличение
высоты ферм приводит к увеличе­
нию длины панелей. Так, напри­
мер, для соблюдения этого усло­
вия панели фермы с параллельны­
ми поясами должны быть примерно
равны высоте фермы (рис. 4.71, а).
Устройство больших панелей
вызывает увеличение массы про­
езжей
части
моста — попереч­
ъш?.
ных балок, опирающихся на узлы
фермы, и главным образом вспомо­
гательных балок, опирающихся на
'
' Vm
--- V
v
v--- v№
--- у
поперечные балки. Экономия ма­
териала на поясах фермы, дости­
гаемая при увеличении высоты
фермы, может оказаться меньше
дополнительного его расхода на
устройство проезжей части моста.
Задача увеличения высоты фер­
*) t
мы может быть рационально ре­
4
\Х k r ^ i
шена при введении в состав каж­
/i.
Л ---^
Адой панели дополнительных двух­
опорных фермочек — шпренгелей
(рис. 4.71, 5), опирающихся на
Рис. 4.71
узлы основной фермы. Стержни
таких фермочек работают лишь на
местную нагрузку, т. e. на нагрузку, приложенную в пределах их
пролетов. Вертикальная местная нагрузка, действующая на шпренгель, передается вертикально же в узлы основной фермы, которые
являются для шпренгеля опорами. Стержень ab (штриховая линия
0 Ин и
М
М
I /
f X
C j ^M
y ^ >
----- А z
^ S
146
T
h
*
^
y ^ 4^
k
i
\
А
M
|
,
X
/^
К ^ ^ ?
\ i
Ч
-------- ^i Д
ч
.
I
на рис. 4.71, б) необходим только для обеспечения геометрической
неизменяемости системы; усилие в нем равно нулю.
Шпренгели позволяют поставить поперечные балки не только
в основных узлах фермы, но и в дополнительных и уменьшить за
счет этого сечения вспомогательных балок; в результате существен­
но облегчается проезжая часть моста. Применение шпренгелей поз­
воляет избежать увеличения массы проезжей части моста при воз­
растании длины панели и добиться уменьшения усилий в поясах
фермы путем увеличения ее высоты.
Связав подвесками нижние дополнительные узлы шпренгелей
с шарнирами, поставленными посередине каждого из элементов
верхнего пояса основной системы, получим ферму, изображенную
на рис. 4.71,e, которая работает совершенно так же, как и ферма
без подвесок (рис. 4.71, б). Уменьшив затем длины подвесок и
вертикальных опорных стержней (с помощью которых шпренгели
опираются на узлы основной фермы) и сделав их в пределе равны­
ми нулю, получим ферму, изображенную на рис. 4.71, г. В этой
ферме нижние пояса шпренгелей сливаются с элементами верхнего
пояса основной фермы. По характеру работы такая ферма анало­
гична ферме со шпренгелями, изображенной на рис. 4.71, д. Уси­
лия в подвесках ks последней фермы равны нулю. Практически дли­
ну каждой такой подвески делают равной ну- ^
а
■ ........ i
лю, т. e. совмещают узел k с узлом s. В резуль­
^v
1 ^4
тате получается ферма, изображенная на рис.
1 ^4
4.71, e, которая носит название шпренгельной 1 ^4vv
I
чч
или фермы со шпренгелями.
Шпренгели, изображенные на рис. 4.71, e,
/h I ^v^
fI /У
передают местную вертикальную нагрузку, при­ I ✓
ложенную к верхним дополнительным узлам,
к.________
вертикально в верхние узлы основной фермы.
Такие шпренгели условимся пазыватъодноярусРис. 4.72
ными. Применяются также шпренгели, которые
местную нагрузку, приложенную к верхним узлам, передают на
нижние узлы] основной фермы (рис. 4.71, ж), или такие, которые
нагрузку, приложенную к дополнительным узлам нижнего пояса,
передают на верхние узлы основной фермы. Такие шпренгели бу­
дем называть двухъярусными.
Нельзя считать шпренгелем систему abcd (рис. 4.72), которая
хотя и опирается на узлы основной фермы, но передает на них кро­
ме вертикальных давлений еще и горизонтальные усилия.
Элементы ферм, в состав которых входят одноярусные шпрен­
гели, можно разбить на следующие три категории:
1) элементы, принадлежащие только основной ферме. Усилия
в этих элементах определяются расчетом основной фермы; эти уси­
лия не меняются при включении в ферму шпренгелей;
2) элементы, принадлежащие только дополнительным фермам
(шпренгелям). Усилия в них могут быть найдены из условий рав­
новесия, составляемых для отдельных частей шпренгеля, который
!
147
при этом можно рассматривать как самостоятельную двухопорную
ферму;
3) элементы, принадлежащие одновременно основной ферме и
- шпренгелю. Усилие в каждом из них равно сумме двух усилий,
одно из которых возникает в элементе основной фермы, а другое —
в слившемся с ним элементе шпренгеля.
Элементы ферм, в состав которых входят двухъярусные шпренгели, делятся на четыре категории: из них первые три те же, что и
для ферм с одноярусными шпренгелями; элементами четвертой ка­
тегории являются те из элементов основной фермы (первой катего­
рии), линии влияния для которых имеют различный вид при езде
поверху и при езде понизу. Наличие двухъярусных шпренгелей,
передающих местную нагрузку из нижних узлов в верхние (или
наоборот), меняет условия ра­
боты таких элементов.
Линии влияния усилий в
элементах четвертой катего­
рии можно получить следую­
щим путем. Построить сна­
чала линию влияния изучае­
мого усилия для основной
фермы (без учета шпренгелей)
при движении по верхним уз­
лам фермы, а затем при дви­
жении по нижним узлам. За­
тем следует установить закон
изменения усилия при нали­
чии в системе двухъярусных
шпренгелей. Для этого необ­
ходимо перемещать груз по
узлам шпренгельной системы
и учитывать, что груз, рас­
положенный в дополнитель­
ных узлах с помощью шпрен­
гелей, передается из узлов
одного пояса фермы (напри­
мер, нижнего) в узлы другого
пояса (верхнего).
Рис. 4.73
Пример 1. Для элементов 2—3,
5—4' и 4' — 7 фермы с одноярусными
шпренгелями (рис. 4.73, а) построить линии влияния (езда понизу).
P e ш e н и e. Начнем с построения линии влияния усилия V2%. Стержень
2—3 является элементом первой категории, а потому при построении линии влия­
ния можно шпренгельные фермочки выкинуть и, таким образом, свести задачу
к построению линии влияния усилия V23 в основной ферме (рис. 4.73, б). Вырезая
из нее узел 3 и рассматривая его равновесие, находим, что линия влияния К2з
имеет вид треугольника, изображенного на рис. 4.73, e.
При построении линии влияния усилия D ^ 7 (стержень 4'—7 является эле­
ментом второй категории) выделим из состава всей системы шпренгель 5—4'—7 и
рассмотрим его как самостоятельную двухопорную ферму (рис, 4.73, г).
148
При грузе P = 1, расположенном в узле 5 ', усилие в стержне 4'— 7 опре­
делится из уравнения, составленного для узла 7:
2
^ = l/2 + D4'7 s in a -0 ,
откуда
D4'7 = “ l/(2 sin a).
При грузе, расположенном в опорных узлах, усилие D4,7 равно нулю.
Полученных значений достаточно для построения линии влияния £>4,?
(рис. 4.73, д).
Для определения усилия в стержне 5—4' сделаем разрез I — I (стержень
5—4' является элементом третьей категории) и, предполагая, что г р у з Р = 1 нахо­
дится на участке между узлами 5 '—13,
ЗйЫпая система
рассмотрим равновесие левой части фер­
4 JL s
мы:
^ Y = R A + D M, s i n a = 0 ,
откуда
Dbi, = — R A!sin a .
Полученное уравнение показывает,
что пока груз находится на указанном
участке, линия влияния D bv может
быть получена из линии влияния R ^
умножением ее ординат на (—l/sin a).
Это обстоятельство позволяет легко
построить правую прямую линии влия­
ния D w (рис. 4.73, e).
Левую прямую строим, используя
положение отом, что она должна прой­
ти через нулевую точку левой опоры
и пересечься с правой прямой под мо­
ментной точкой, находящейся в дан­
ном случае в бесконечности. Переда­
точную прямую проводим, соединяя
вершины ординат влияния под узлами
5 и 5' (рис. 4.73, ё). Интересно отме­
тить, что при отсутствии шпренгелей
передаточная прямая соединила бы ор­
динаты под узлами 5 и 7, в результате
чего исчез бы треугольник abc, являю­
щийся в шпренгельной ферме линией
влияния усилия элемента 5—4' (анало­
гично изображенной на рис. 4.73, ддля
элемента 4' —7).
Пример 2. Построить линию влия­
ния для стойки 3—4 (элемента четвер­
той категории) фермы с двухъярусными
шпренгелями (рис. 4.74, a); движение
.происходит по нижнему поясу фермы.
P e ш e н и e. Выбросив шпренгельные фермы, получим основную сис­
тему, изображенную на рис. 4.74, б.
Построим для нее линии влияния уси­
Рис. 4.74
лия в стойке 3—4 при движении по­
верху и понизу.
Сделаем разрез / —1 (рис. 4.74,6). Предположив, что груз P= 1 находится
в правой части фермы, составим условие равновесия для левой части:
% M k= — R Aa— VM(a+2d)=0,
149
Рис. 4.75
откуда
V3^ - R Aa/(a+2d).
Отложив на левой опорной вертикали вниз ординату a/(a+2d) и соединив ее
вершину с нулевой точкой правой опоры, получим правую прямую линии влияния,
на которую снесем узлы 5, 7, 9 и 11 (в случае движения понизу) или узлы4 , 6,
S, 10 и 11 (при езде поверху). Левую прямую строим, используя известное положение о том, что она пересека­
cc g
ется с правой под моментной
точкой (точкой k). Затем про­
водим передаточные прямые.
Построенные таким обра­
зом для основной системы
линии влияния Уы при движеиии понизу и поверху изоб­
ЛВ.О’д[дВажение noBepxy ипи понизу)
Б)
ражены на рис. 4.74, e, г. Из
них видно, что пока груз на­
ходится левее узла 1 или
правее узла 5, числовая ве­
личина усилия не зазисит от
того, на какие узлы (нижние
или верхние) основной фермы
передается нагрузка.
Груз, расположенный в
AS.Vgi (ИВижте понизу)
узлах 3' и 5', с помощью
^
шпренгелей (двухъярусных)
7
передается в верхние узлы
фермы, и, следовательно, в
этот момент как бы осуще­
ствляется движение поверху.
Лб.УЙ (дВижение noBepxy)
»J
Поэтому ординаты линии
влияния У34 для заданной
~ _P ^~ ^ 7
системы (см. рис. 4.74, а) из­
^.jgj_JllllllHllilTri^
^ ...^^^illinnililliitrrmwJi
меряются в этом случае
отрезками m —. m и n — n
^iW ^J L
(рис. 4.74, г).
При положении же груза
P = 1 в узле 3 шпренгельные
ЛВХя Зля зпдантй шпренгепьной
фермы не работают и, следо­
системы j
вательно, ординатой искомой
ъ)
линии влияния является от­
4 ^ ^ T T ^
^тТТ7ТТТТШ1|Шк
резок и — и на рис. 4.74, в9
Найденных ординат дос­
таточно для того, чтобы вы­
чертить искомую линию влияиия усилия в стойке 3—4 .
Рис. 4.77
Эта линия влияния для за­
данной (шпренгельной) систе­
мы изображена на рис. 4.74, д.
Задача. Для ферм, изображенных на рис. 4.75 и 4.76, требуется:
а) проверить построенные линии влияния (движение по нижним поясам ферм);
б) построить линии влияиия для стержией, отмеченных черточками.
У к а з а н и e. При построении линии влияния усилия в стойке 8—9
(рие. 4.76) следует сначала получить основную систему, исключив шпренгели
(рис. 4.77, а).
Усилие в стержне 8—9 основной системы определяем из условий равновесия
узла 9:
Y = — V% — 20 7Qsin a = 0;
Следовательно, усилие в стержне 8—9 равно усилию в стержне 7—9,
151
умноженному на постоянный коэффициент (—2 sin а). Верхний индекс «0»
означает, что рассматривается усилие в стержне основной системы.
Линия влияния усилия 0?9 в элементе верхнего пояса 7—9 изображена
на рис. 4.77, б. Она имеет вид равнобедренного треугольника с отрицательной
ординатой в вершине:
1
18
/ 3 * + 0,5*
3 )^ 3 7
4 * 3 ,5 d co sa ~”
4-3,5
3
14
Линия влияния vls Для случая движения понизу (рис. 4.77, в) также
имеет вид равнобедренного треугольника.
Наибольшая ордината этой линии влияния равна
3^37
2-1
3
14 ' ^ 3 7 ” 7 '
Для построения линии влияния Vss при движении поверху следует вто­
рично рассмотреть условие равновесия узла 9, прикладываякнему груз P = 1 :
2 ^ = — V»e—20?# s i n a — l = 0 ;
V$s = — 20% sin а — 1 = 3/7— 1 = — 4/7.
Линия влияния Keg при движении поверху изображена на рис. 4.77, г.
Из линий влияния (рис. 4.77, в, г) видно, что пока груз находится левее узла 6
или правее узла 10, числовая величина усилия не зависит от того, на какие узлы
(нижние или верхние) основной фермы передается нагрузка.
Груз, расположенный в дополнительных узлах панелей 6—8 и 8—10, с по­
мощью шпренгелей (двухъярусных) передается на верхние узлы фермы и, следо­
вательно, в этот момент как бы осуществляется движение поверху.
Линия влияния усилия V98 в заданной шпренгельной системе изображена на
рис. 4.77, д.
§ 4,9. ТРЕХШАРНИРНЫЕ АРОЧНЫЕ ФЕРМЫ
И КОМБИНИРОВАННЫЕ СИСТЕМЫ
В трехшарнирных арочных фермах, в отличие от трехшарнир­
ных арок, диски арок представляют собой фермы. Такая система
состоит из двух ферм, связанных между собой одним общим шар­
ниром и опирающихся на шарнирно неподвижные опоры. Рассмот­
рим сквозную трехшарнирную арку с опорами, расположенными
на одном уровне (рис. 4.78, а). Вертикальные составляющие опор­
ных реакций и распор будут теми же, что и в раме, ограниченной
контуром AECFB (рис. 4.78, a). Так, при действии вертикального
груза P = 1, расположенного на расстоянии x от левой опоры
(рис. 4.78, a), реакции VA и VB соответственно равны
VA= (t—x)/t; VB=x/l.
Распор H определяется уравнением (см. § 3.5)
H=M df,
где М с— изгибающий момент от заданной нагрузки в сечении С
двухопорной балки пролетом /.
Линии влияния VAt VB и H приведены на рис. 4.78, б — г.
Построим линию влияния усилия D (рис. 4.78, a). Проведем
сквозное сечение, пересекающее раскос D.
152
Ve
Линия „
длияния %
*Лтия
1
длиямия V3
iЛиния
длияния И
COS 4 5 * " 1’ ^
Линия
^,
IПередаточная
^ % }
Мая
ППЯМОЯ
i i
I
I
f
Шяная Q
t r
^ШШПШПЯ=----уI Лини*
ш т а
r
! Линия
Влияния Vnp
I
1Линия
Ьаияния П,
L)
ы
птгтгт
1 illl
Рис. 4.78
Рассмотрим два положения груза.
Груз левее сечения
2 Y np= о,
VB— D co sa = 0,
n _ _ K fl_
U ~ cos 45° '
Груз правее сечения
2 глев= °«
V^4 + D c o s a = 0,
D -
v*
cos 45° ‘
В соответствии с полученными уравнениями проводим левую и
правую прямые, далее сносим на них соответственно левые и правые
i53
узлы, в пределах рассеченной панели проводим передаточную пря­
мую. Полученная линия влияния приведена на рис. 4.78, д.
Для построения линии влияния U (рис. 4.78, а) используем
способ нулевой точки. Если груз находится правее рассеченной
панели, то составляя сумму моментов левых сил относительно мо­
ментной точки K u получим
— Ud— H*bd + VA- M ^ 0 ,
отсюда
U = ± ( V A. M - H . ' b d ) = ^ ,
(4.5)
где М к г—момент в сечении К± рамы AECFB.
Если груз расположен на участке KiC, то уравнение (4.5) пред­
ставляет собой уравнение прямой (линии влияния VA и H при этом
линейны и их сумма с постоянными коэффициентами также линей­
на). Построим эту прямую, для чего найдем две ее точки. При по­
ложении груза на KiC правая реакция направлена от шарнира В
к шарниру С. Если левая реакция проходит через точку К±, то
AfKt=0 и U=0. Таким образом, если груз расположен под точкой
пересечения прямых A K i и ВС, то ордината линии влияния U равна
нулю. Для отыскания ординаты второй точки этой прямой посту­
паем формально, допуская, что уравнение (4.5) справедливо и при
любом положении груза P = l (на самом деле, оно верно только в слу­
чае, когда груз P = 1 находится правее рассеченной панели — на
участке KiC).
Подставляем в уравнение (4.5) значения VA и H, соответствую­
щие положению груза P = l в шарнире E . Из уравнения (4.5) находим искомую ординату cГ7/ = ^3d- = 3о, так как при этом положении
груза VA = l и tf = 0 .
Соединяя вершину ординаты, равную 3, с нулевой точкой (рас­
положенной под точкой пересечения прямых A K i и ВС), получим
прямую (/ правую) линию влияния V, характеризующую закон
изменения этого усилия при положении груза на участке KiC
(рис. 4.78, ё). Сносим на эту прямую соответственно узлы Ki и С и
заштриховываем эту часть линии влияния. Если груз находится
на участке CF, то для определения усилия U сохраняется уравнение
(4.5). График его по-прежнему будет прямая линия.
Для ее построения необходимо иметь две ее ординаты. Ордината
в точке С известна, а когда груз находится в точке F, усилие U
равно нулю. Соединяя эти точки, получим участок линии влияния
( / / правую), когда груз располагается на участке CF (см.
рис. 4.78, а). Наконец, рассмотрим случай, когда груз находится
левее рассеченной панели (построим левую прямую). Уравнение
при этом будет иметь вид
U = ^ ( V A -3d— H .5 d — lx 1).
154
(4.6)
Когда груз находится в точке K^(A^ = 0), ордината линии
влияния известна, а когда груз находится в точке E (я1= 3d),
U = — (1 - 3d— 0-5d— 1 • 3d) — 0.
Соединяя вершину ординаты в точке K t с нулем на левой опоре, по­
лучим левую прямую линии влияния U (рис. 4.78, e). Сносим на
нее соответствующие узлы системы и заштриховываем эту часть
линии влияния. Передаточная прямая совпадает с левой прямой
(рис. 4.78, e).
Далее поясним процесс построения линий влияния в пределах
вертикальных участков системы. Рассмотрим левую вертикальную
часть фермы. Эта часть имеет левый и правый пояса. Для элементов
правого пояса моментные точки находятся на прямой A E и линии
влияния выражаются через линию влияния Я . Например, состав­
ляя сумму моментов усилий, действующих на нижнюю часть отно­
сительно точки K 2>получим
2 ^ к 2= 0; - H . 2 d - V ng-d = 0,
откуда
Knp = - 2H.
Линия влияния Vnp изображена на рис. 4.78, ж. Аналогично,
через распор Я, выражаются и усилия в элементах решетки.
Например, составляя сумму проекций на ось X , получим
H ^ - D 1 cos 45° = 0,
откуда
Линия влияния Dj изображена на рис. 4.78, з. Для построения
линий влияния усилий в левом поясе вертикальной части фермы
используем способ нулевой точки. Проведемсечениеирассмотрим
условие равновесия отсеченной нижней части:
2 M
K, = v aelfi + v Ad - H . 3 d = o ,
откуда
VjQB=3H— VA.
Проводя прямые А К 3 и ВС, получим нулевую точку. Далее,
при расположении груза в точке E будем иметь Я = 0; VA = \ f
тогда Клев = — 1. Остальныепостроения аналогичныпредыдущему.
Особенностью является то, что груз всегда находится с одной
стороны (на участке ECF) по отношению к сечению. Линия вли­
яния Улев изображена на рис. 4.78, и .
Рассмотрим далее комбинированную систему, состоящую из
шарнирной цепи и двух балочных ферм, соединенных шарниром
(рис. 4.79, а). Построим первоначально линии влияния опорных
155
реакций. Составляя сумму моментов всех сил относительно точ­
ки А , получим
l>x-(V'B + V h ) l = 0 .
Обозначая V'B + VB = VBi получим VB = x/l.
О)
1\
Рис. 4.79
Линия влияния суммарной реакции У^приведена на рис. 4.79, б.
Аналогично строится и суммарная реакция VA (рис. 4.79, в).
Проведем сечение I —/ через точку С1. Рассмотрим два положе­
ния груза и составим суммы моментов относительно точки Сх.
1 В точке С действует горизонтальная составляющая усилия элемента
цепи ( r t+ l) — С, равная tf.
156
»
н = у в^г
(4.7)
(4.8)
На рис. 4.79, г построена линия влияния распора в соответствии
с уравнениями (4.7) и (4.8). Проведем сечение I I — I I и отсечем
часть цепи AK. Из суммы проекций на горизонтальную ось по­
лучаем, что горизонтальная составляющая усилия, действующего
в звене n , ra + l(W w+1), равна распору Я . Вырежем n-й узел
цепи (рис. 4.79, д). Из суммы проекций на ось X получаем, что
горизонтальные составляющие усилий N n и N n+1 одинаковы и
равны Я . Таким образом, для получения линий влияния уси­
лий в цепи необходимо ординаты линии влияния Я разделить
на косинус угла наклона звена к горизонтали:
Для построения линий влияния в подвесках составим сумму
проекций сил, приложенных к узлу n (см. рис. 4.79, 5):
W „sina„ — N„+ is in a „ +1—K„ = 0,
откуда
Vn = N n sin а п — Nn+1 sin ап+1.
Подставляя УУя и Nn+i в соответствии с формулой(4.9),получим
V„ = H tg a „— H tg a „ +1 = # ( t g a „ —t g a „ +1).
Линию влияния Vn не приводим, она имеет вид линии влияния
Я , ординаты которой умножены на постоянный коэффициент
( tg a „ — tg a n+i)Построим линии влияния усилий в стержнях фермы. Рассмот­
рим элемент верхнего пояса 0 (рис. 4.79, а). В качестве момент­
ной точки возьмем точку К г- Проведем через точку К± вертикаль
до пересечения со звеном n, n + l в точке К* Проведем через
точку К сечение I I —III. На рис. 4.79, а показаны силы Я и V ,
действующие на часть цепи AK* Распор Я , действующий в точке
А и точке Ky образует пару сил, момент которой относительно
любой точки равен Н ук. Рассмотрим два положения груза:
1) груз правее рассеченной панели
S M fti = 0; VAxK— HyK^-0 *h — 0,
откуда
0 = j^ (— VA* # + HyK)\
2) груз левее рассеченной панели
S M ^N = 0; Улхк — HyK~^o*fo— i**x = o,
157
откуда
0 = 7^- (— Улхк^~Н ук + хi).
Таким образом, линия влияния 0 выражается через линию влия­
ния момента М к в сечении К арки ACB:
0 = M K/h.
Для построения линии влияния М к воспользуемся способом нулевойточки (см. § 3.5). Линия влияния 0 приведена на рис. 4.79,e.
Далее построим линию влияния D:
груз правее рассеченной панели
2 ^ лев = 0; — D co sa + K^ — V = 0,
откуда D = ^ ( V A- V ) .
В соответствии с рис. 4.79,a имеем
V = N n+i sin a n+i.
(4.11)
Подставляя (4.9) в (4.11), получим
V = H t g a „ +i.
(4.12)
(4.10)
Подставляя (4.12) в (4.10), получим
D = ^ k ^ - t f t g a „ +1).
(4.13)
Определим нулевую точку (положение груза P = 1, при котором
D==0)
_ ^ ( ^ - t f t g a „ +1) = 0,
откуда
VA/H = t g a n+i.
Таким образом, полная реакция должна быть наклонена к горизон­
тали под углом an+f (параллельна звену n, n + l) . Дальнейшие
выкладки аналогичны построению линии влияния поперечной силы
в сечении К арки ACB (см. § 3.5). Линия влияния D приведена на
рис. 4.79, ж.
Глав a 5
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ
В УПРУГИХ СИСТЕМАХ»
§5 .1 . РАБОТА ВНЕШНИХ СИЛ. ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ
Приложение нагрузки к любому сооружению вызывает его де­
формацию. При этом части сооружения выходят из состояния по­
коя, приобретают некоторые скорости и ускорения. Если нагрузка
возрастает медленно, то эти ускорения невелики, а потому можно
пренебречь силами инерции, развивающимися в процессе перехода
системы в деформированное состояние. Такое плавное (постепенное)
приложение нагрузки называется статическим.
Определим работу внешней нагрузки, например силы P , стати­
чески приложенной к некоторой
упругой системе (рис. 5.1), мате­
риал которой удовлетворяет^ зако­
ну Гука.
При малых деформациях к этой
системе применим принцип неРис 5 г
зависимости действия сил, и, сле­
довательно, перемещения отдель­
ных точек и сечений конструкции прямо пропорциональны числовой
величине вызывающей их нагрузки. В общем виде эту зависимость
можно выразить равенством
Д =аЯ .
(5.1)
1
I
Здесь А — перемещение по направлению действия силы P; а —
некоторый коэффициент, зависящий от материала, схемы и размеров
сооружения.
Увеличим силу P на бесконечно малую величину dP. Это при­
ращение вызовет возрастание перемещения на dA.
Составим выражение элементарной работы внешней силы на
перемещении dA, отбрасывая при этом бесконечно малые величины
второго порядка малости:
d A = P dA .
Заменяем значение dA на основании формулы (5.1) выражением
dA = P d k = a P d P .
Интегрируя это выражение в пределах полного изменения силы
от нуля до ее конечного значения, получаем формулу для опреде­
ления работы, совершенной статически приложенной внешней
1 См.: ДарковА. B .t ШпироГ. С. Сопротивление материалов. М., 1975.
159
силой P :
Так как A = a P, то полученную формулу можно представить
в виде
Л = Р А /2.
(5.2)
В общем случае направление силы P может не совпадать с на­
правлением вызванного ею перемещения. Так как числовая величи­
на работы определяется произведением силы на путь, пройденный
по направлению этой силы, то под величиной А надо понимать про­
екцию действительного (полного) перемещения точки приложения
силы на направление силы. Например, при действии силы P под
углом P к горизонтальной оси
(рис. 5.2) перемещение А измеряет­
ся отрезком ab (представляющим
собой проекцию действительного
перемещения aat на направление
силы P).
Рис. 5.2
В случае, когда к системе при­
ложена пара сил с моментом M
(сосредоточенный момент), выражение работы можно получить ана­
логичным образом. При этом необходимо выбрать соответствующий
сосредоточенному моменту вид перемещения; это будет угол пово­
рота того поперечного сечения бруса, к которому приложенмомент.
Например, работа момента, статически приложенного к балке,
изображенной на рис. 5.3,
A= M bI2,
(5.3)
где ft — угол поворота (в радианах) того сечения балки, к которому
приложен момент M .
Итак, работа внешней силы при статическом действии ее на
любое упругое сооружение равна половине произведения значения
этой силы на величину со­
ответствующего ей переме­
щения.
Д ля обобщения полу­
ченного вывода под силой
понимаем любое воздейст­
Рис. 5.3
вие, приложенное к упру­
гой системе, т. e. не только
сосредоточенную силу, но и момент, равномерно распределенную на­
грузку и т. п.; под перемещением понимаем тот вид перемещения,
на котором данная сила производит работу. Сосредоточенной силе
P соответствует линейное перемещение, моменту M — угловое,
а равномерно распределенной нагрузке — площадь эпюры переме­
щений на участке действия нагрузки.
160
При статическом действии на сооружение группы внешних сил
работа этих сил равна половине суммы произведений каждой силы
на величину соответствующего ей перемещения, вызванного дей­
ствием всей группы сил. Так, например, при действии на балку,
изображенную на рис. 5.4, сосредоточенных сил Р и Р 2 и сосредо­
точенных моментов M u М 2 ра­
рг
рг
бота внешних сил
у иг
t
А = Р \к \1 2 ^гР 2£±ъ12^г
уf
>
f
\
^MM*MMM*N^ '
+ M & J 2 — M & J2 .
g T ^ f c p ^ i
fк
A
f
Знак минус перед последним t
< s fd ? "
членом выражения принят пото­
Рис. 5.4
му, что направление угла поворо­
та $ 2поперечного сечения балки,
в котором приложен момент М 2у противоположно направлению
этогс момента»
Итак,
4 = S ( W 2 ) + 2 ( A M ,/2 ) .
(5.4)
Работу внешних сил на вызванных ими перемещениях можно
выразить и иначе, а именно: через изгибающие моменты, продоль­
ные и поперечные силы, возникающие в поперечных сечениях стерж­
ней конструкции.
___
J
I
1
I
1L aУ
a^W
>^i
^ ^■
I
I1
I
dx
<— ------ ч i i «<
Рис. 5.6
Выделим из прямолинейного стержня двумя сечениями, перпен­
дикулярными его оси (рис. 5.5), бесконечно малый элемент длиной
dx (элемент dx). Стержень состоит из бесконечно большого числа
таких элементов. К элементу d* в общем случае плоской задачи 1
приложены продольная сила N, изгибающий момент M и попереч­
ная сила Q.
Усилия N, УИ, Q являются внутренними усилиями по отношению
к целому стержню. Однако для выделенного элемента они являются
внешними силами, а потому работу А можно получить как сумму
работ, совершенных статически возрастающими усилиями iV, M, Q
1 При плоской задаче продольные оси всех элементов системы, одна из глав­
ных осей инерции каждого поперечного сечения любого элемента, а также и все
действующие^ на систему нагрузки (силовые и моментные) расположены и одной
плоскости; эта плоскость называется расчетной и при изображении системы совме­
щается с плоскостью чертежа.
6 № 2418
161
на соответствующих деформациях элементов dx. Рассмотрим от­
дельно влияние каждого из этих усилий на элемент dx.
Элемент dx, находящийся под действием только продольных сил
N, изображен на рис. 5.6. Если левое его сечение считать неподвиж­
ным, то правое сечение под влиянием продольной силы переместится
вправо на вeличцнyAx=Ndx/(EF). Наэтом перемещении статически
возрастающая сила N совершит работу
d A y = N A x/2=(N/2) Ndx/(EF).
(5.5)
Элемент dx, находящийся под действием только изгибающих
моментов М 9 изображен на рис. 5.7. Если левое его сечение непо­
движно закрепить, то взаимный угол поворота торцовых сечений эле­
мента будет равен углу поворота A$ его правого сечения:
A$=Mdx/(EJ).
На этом угловом перемещении статически возрастающий мо­
мент M совершит работу
d A M=MA$/2=(M/2) Mdx/(EJ).
(5.6)
Элемент dx> находящийся под действием только поперечных сил
Q, изображен на рис. 5.8, а. Закрепив левое его сечение (рис. 5.8, б),
приложим к правому касательные усилия rdF, равнодействующей
которых является поперечная сила Q.
f=1
\
\
*
^^^^^^^^^^^^^^^^^м
-l
4
\
\
i
v
■ 1I
м
V
\
\
r
_^ v %
u^>
Рис. 5.7
Рис. 5.8
Предположим, что касательные напряжения т равномерно рас­
пределены по всей площади F поперечного сечения, т. e. r=Q/F;
тогда перемещение Ау (рис. 5.8, б), вызванное действием поперечной
силы Q, представляющее собой сдвиг торцовых сечений элемента
dx друг относительно друга, определится из выражения
Ay= y dx=(r/G) dx=Qdx/(GF)y
а работа статически возрастающей силы Q на этом перемещении
^ - 4 - Q 4 ,- 4 - < 2 ^ .
В действительности касательные напряжения t распределены
по площади поперечного сечения неравномерно, что учитывается
162
путем введения поправочного коэффициента г]. Следовательно,
di4<j = y Q ^ 4 .
(5.7)
vПри одновременном действии на выделенный элемент dx про­
дольной силы N, изгибающего момента M и поперечной силы Q
работа каждой из этих сил на перемещениях, вызываемых осталь­
ными силами, равна нулю. Так, например, при действии продоль­
ных сил N не происходит взаимный поворот и сдвиг торцовых сече­
ний элемента dx (см. рис. 5.6), и, следовательно, работа изгибаю­
щего момента M и поперечной силы Q на деформациях элемента d*
от силы N равна нулю. Поэтому полная работа
d ^ = d 4 „ 4 ^ M+ d 4 Q= 4 ^ A ^ + M ^ + Q % f % ) .
(5.8)
В формуле (5.8) множители N, M и Q представляют собой внут­
ренние усилия в поперечном сечении, а множители Ndx/(EF),
Mdx/(EJ) и [Qdx/(GF)] г| — соответствующие им деформации эле­
мента dx стержня.
Интегрируя выражение dА в пределах длины / каждого участка
всех стержней и производя суммирование по всем участкам системы,
получаем следующую формулу для вычисления работы внешних
сил на вызванных ими перемещениях (в случае плоской задачи):
/
/
/
л
yr^ Г M 2 dx . ^ ^ С N 2 dx . ^ ^ С Q2 dx
^ L . j w
о
+ E j w
о
+ E j w
0
^
,r п\
<5-9)
Из формулы (5.9) видно, что работа внешних сил на вызванных
ими перемещениях всегда положительна.
На основании закона сохранения энергии работа А внешних
сил переходит в потенциальную энергию U деформации, т. e.
A = U.
(5.10)
Подставим в равенство (5.10) выражение А по формуле (5.9):
и
t
тгл C M 2 dx
^ = E
j w
о
^
+ Z
t
C N 2 dx
j w
о
i
CQ’2 dx
/к 1 п
+ E j w *
(5-11)
^
о
Полученные в настоящем параграфе формулы применимы не
только для прямых стержней, но и для стержней малой кривизны.
§ 5.2. ТЕОРЕМА 0 ВЗАИМНОСТИ РАБОТ
Перемещения (прогибы и углы поворота) системы в результате
ее деформации условимся обозначать Дтп, где индекс m указывает
направление перемещения, a n — причину, вызвавшую его. Таким
образом, Дтп— перемещение по направлению «силы» m, вызванное
«силой» я. Перемещение Дтп может представлять собой либо линейцо.е смещение, либо угол поворота (в радианах) в зависимости от
того, является сила m сосредоточенной силой или сосредоточенным
6*
163
моментом. Под силой n понимается любая нагрузка, действующая
на сооружение, например нагрузка, состоящая из нескольких со­
средоточенных сил и моментов и какой угодно распределенной на­
грузки.
Рассмотрим два состояния упругой системы, находящейся в рав­
новесии. В каждом из этих состояний на систему (сооружение) дейЛердое состояние
ствует некоторая статическая на­
грузка, например в первом сос­
тоянии сила Р 1у а во втором —
сила Р 2 (рис. 5.9).
На рис. 5.9 показаны переме­
щения Ди , Д13, Д21 и Д22, кото­
рые представляют собой:
Ди— перемещение по направ­
лению силы P 1 от действия си­
лы Р г;
Д12— перемещение по направ­
лению силы P 1 от действия си­
лы Р 2\
Д21— перемещение по направ­
лению силы Р 2 от действия си­
лы Р г\
Д22— перемещение по направлению силы Р 2 от действия силы Р 2.
Работу силы Pi (т. e. нагрузки первого состояния) на вызванных
ею перемещениях (т. e. на перемещениях первого же состояния)
обозначим A 1U а работу силы Р 2 на вызванных ею перемещениях —
А 22.
Числовые величины этих работ при статическом действии сил
равны [(см. выражение (5.4)3:
Л п = Л Д ц /2 ; A , 2= P 2A J 2.
(5.12)
Работы A u и А 22 (в случае плоской задачи) с помощью формулы
(5.9) можно выразить через внутренние усилия, возникающие в по­
перечных сечениях стержней системы:
/ Л
i
Q j dx
A
— V Г M^dx I у Г Д71 d * I у Г Qi
dxn.
Л и “
2 * J
2E J
^ Z d
J
2EF
1
А 22
2E J
! ^uJ
2шЛ J
2G F ^
t
Q l dx
N l dx
2E F ' L u J 2 G F ^ '
(5.13)
0
0
0
Рассмотрим теперь случай статического нагружения той же
системы (см. рис. 5.9) силами Р х и Р 2 в такой последовательности.
Сначала к системе прикладывается статически нарастающая сила
Р х (рис. 5.10). Когда процесс ее статического нарастания закончен,
деформация системы и внутренние усилия, действующие в ней,
становятся такими же, как и в первом состоянии, изображенном
на рис. 5.9, а. Работа силы Р± в процессе ее нарастания от нуля до
ее конечного значения равна A a = P ^ J 2. Затем на систему начинаетдействоватьтакже статически нарастающая сила Р 2 (рис. 5.10).
164
В результате этого система получает дополнительные деформа­
ции и в ней возникают дополнительные внутренние усилия, равные
деформациям и усилиям во втором состоянии, изображенном на
рис. 5.9, б. В процессе нарастания силы Р 2 от нуля до ее конечного
значения сила Ри оставаясь постоянной, перемещается вниз на
величину дополнительного про­
гиба Д12 и,следовательно, совер­
шает дополнительную работу,
равную А 12= Р гА12; сила Р 2 при
этом совершает работу А 22=
= P 2А22/2. Таким образом, пол­ Упрцгая'линия опт ^
ная работа А при последова­ деисщбип m Р} и Рг
тельном нагружении системы си­
Рис. 5.10
лами Р г и Р г равна:
A — A n ^ - A i z ^ - A 2 2=== P 1 ^ n ^
24- P 1 Д 1 2~H P
2Д 22 /2 .
(5.14)
С другой стороны, работу А сил Pi и Р 2 можно определить по
формуле (5.4) как полусумму произведений каждой из этих сил на
соответствующее ей полное перемещение, вызванное обеими силами
(рис. 5.11):
— .
(5.15)
Приравниваем друг другу выражения (5.14) и (5.15):
P 1A 1i , n л
Pi* 12
1
1
P 2A 22
откуда
(5.16)
P 1 Д12 —P 2Д 21<
Значение P i ^ u представляет собой работу А 12 силы Р х первого
состояния (см. рис. 5.9, а) на перемещении по ее направлению, вы­
званном силой Р 2 второго состояния (см. рис. 5.9, б). Аналогично,
Р 2Д21 представляет собой работу А 21 силы Р 2 второго состояния на
перемещении по ее нап­
равлению, вызванном си­
лой Р х первого состояния.
Следовательно,
А 12= А
21 '
(5.17)
Такой же результатбыл
Рис. 5 .ll
бы получен, если бы в каж­
дом из рассмотренных сос­
тояний (см. рис. 5.9, а, б) к системе прикладывалась не одна сила,
а любое число сил и моментов.
Таким образом, работа сил первого состояния на перемещениях
по их направлениям, вызванных силами второго состояния, равна
работе сил второго состояния на перемещениях по их направлени­
ям, вызванных силами первого состояния.
165
Этот вывод носит название т e о p e м ы о в з а и м н о с т и
р а б о т или т е о р е м ы Б е т т и .
Выразим работу А 12 через изгибающие моменты, продольные и
поперечные силы, возникающие в первом и втором состояниях.
Из выражения (5.14)
Ai2= A —А ц —А 22.
(5.18)
Здесь А — полная работа, совершаемая силами Р х и Р %на переме­
щениях, вызванных этими же силами. На основании формулы
(5.11)
А- V
f <«■ + y
d«+ v
0
l' № + "■>’ * + V Г W . + y * л, (5. 19)
0
0
где суммы TWi + Mjj, Л^ + А^ и Qi + Q2 представляют собой пол­
ные значения внутренних усилий в поперечных сечениях стерж­
ней от суммарного действия сил P t и Р 2.
Подставим в правую часть формулы (5.18) выражения А,
А ц и Л22 по формулам (5.19) и (5.13):
л
„ = £ $ <м'+M-fe " !
-
1<b
0
+V f
<” '
+"'f.7
" ''
- m dx+
0
\Q i+ Q «)2- Q i - Q S Hrri
2GF
^* '
или
/
0
/
г
0
Каждое подынтегральное выражение в правой части равенства
(5.20) можно рассматривать как произведение внутреннего усилия
(например, изгибающего момента М х)у возникающего в сечении
стержня от сил первого состояния, на деформацию [например,
M 2dx!(EJ)] элемента dx, вызванную силами второго состояния.
§ 5.3. ТЕОРЕМА 0 ВЗАИМНОСТИ ПЕРЕМЕЩЕНИЙ
Рассмотрим два состояния системы. В первом состоянии к систе­
ме приложена сила P i = l , а во втором — сила P 2= 1 (рис. 5.12).
Обозначим перемещения, вызванные единичными силами или
моментами (т.е. силами P = 1 или моментами M = 1), знаком 8
в отличие от перемещений, вызванных силами и моментами, не рав­
ными единице, обозначаемых знаком А. В соответствии с этим пере­
мещение рассматриваемой системы по направлению единичной силы
Р 2 в первом состоянии (т. e. вызванное силой P i = l ) обозначим 62i,
а перемещение по направлению единичной силы Р г во втором состоя­
нии обозначим б12 (рис. 5.12).
166
На основании теоремы о взаимности работ [см. формулу (5 16)]
ддя рассматриваемых двух состояний
P 1^12—Р 2^21»
но так как
P l= P 2~ 1>
TO
Si2“ S2i,
или в общем случае действия любых единичных сил
6т „ = 8 т
(5.21)
Полученное равенство носит название теоремы о взаимности
перемещений (теоремы, или принципа, Максвелла): для двух еди­
ничных состояний упругой системы перемещение no направлению
a)
flspSoe состояние
д)
Второе состояние
Jlep8oe состояние
I
^1 M=1
Второе состояние
м(i
л^
’
Ч
Л
n ^^^
.-. а . _
^-—
■^^^““_—
s^
^^
i --------- ^^ -----------------
Рис. 5.13
Рис. 5.12
первой единичной силы, вызванное второй единичной силой, равно
перемещению no направлению второй силы, вызванному первой силой.
Для иллюстрации теоремы Максвелла в качестве примера рас­
смотрим два состояния балки, изображенной на рис. 5.13. В первом
состоянии на балку действует сила P = l , а во втором — момент
A f= l.
Угол поворота йа, вызванный силой P = 1, на основании формулы
(5.21) должен быть численно равен прогибу у ь вызванному моментом
M = 1, т. e. ba= y t.
Определим значения §а и y t методом начальных параметров.
В первом состоянии (рис. 5.13, а)
о
1
(
^ а ~ -~ ~ Ё Т \
n,
, Р а 2\
Ра
^ ~ ~ J
( j
а
EJ V
2
во втором состоянии (рис. 5.13,6)
1 Г
^ 1 ~~ E J [
J
*W 2 , Л>г(/—a)21
2 +
2
—
М а(1
EJ \
а\
2) ’
167
При M = P — 1
^a = - ^ p ( / - y )
И y t= -E J ^-^)>
т. e.
Ъа = Уг
Единичные перемещения (например, перемещения, вызванные
отвлеченной единичной силой P = 1 или отвлеченным единичным
моментом M = 1) имеют размерности, отличные от обычных размер­
ностей перемещений. Размерность единичного перемещения представ­
ляет собой размерность отношения перемещения (не единичного)
к вызвавшей его нагрузке. Так, например, в рассмотренном при­
мере единичный угол поворота #а, вызванный силой P = 1, выражен
в 1/кН, единичный прогиб y t>вызванный моментом M = 1 , выражен
в м/кН-м, или 1/кН, т. e. в тех же функциях, что и угол fla.
§ 5.4. ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ. ИНТЕГРАЛ МОРА
Универсальный метод определения перемещений (линейных
перемещений и углов поворота), возникающих в любой стержневой
системе от произвольной нагрузки, имеет особенно большое значе­
ние для расчета статически неоп­
c)
flep8be состояние
ределимых систем.
(действительное)
Рассмотрим два состояния сис­
темы. В первом состоянии на нее
действует любое число каких угод­
но сил и моментов (рис. 5.14, а).
4?/
Во втором состоянии к системе
Второе состояние
приложена одна лишь сосредото­
[единичное)
ченная сила P 2= 1 (рис. 5.14, б).
Составимвыражение работы А Ъ1
силы P 2~ 1 на перемещении А2х,
возникающем от сил первого сос­
тояния:
Рис. 5.14
A 2i = Р 2^ 21— 1 *^21 “ ^2l*
Выразим А 21 (в случае плоской задачи) через внутренние уси­
лия в стержнях системы [с помощью формул (5.17) и (5.20)]:
A i = 4 u = X j ^ . Т Г Г + Е 1 ^ % ^ + Z j V 2% ^ 4 (5.22)
0
0
0
Условимся, что черточки над M 2r N 2 и Q2 указывают на то, что
эти внутренние усилия вызваны действием силы, равной единице.
Таким образом, перемещение от любой нагрузки с помощью
формулы (5.22) можно выразить через внутренние усилия, возни­
кающие в заданной системе от этой нагрузки и возникающие в ней
от единичной силы. Направление единичной силы совпадает с на­
правлением определяемого перемещения. Если определяется ли­
168
нейное смещение (например, прогиб какой-либо точки оси стержня),
то единичная сила представляет собой безразмерную сосредоточен­
ную силу, приложенную в этой точке; если же определяется угол
поворота поперечного сечения в какой-либо точке оси стержня, то
единичная сила представляет собой сосредоточенный момент (также
безразмерный), приложенный в этой точке.
Состояние сооружения, вызванное действием единичной силы,
называется единичным состоянием (или фиктивным). В отличие от
него состояние, вызванное действием заданной нагрузки, называ­
ется действительным (или грузовым).
Иногда цифровые индексы 1 и 2 в формуле (5.22) заменяются
буквенными, например m и n, тогда эта формула принимает вид
А- - = Е о1 ^ - % г + Е 1о ж- % г + Е оК - ^ ^
( 5 -2 3 )
где Атп — перемещение по направлению «силы» Р т= 1, вызванное
действием нагрузки n (группы «сил» n).
При размерах поперечных сечений каждого стержня системы,
постоянных по длине этого стержня, выражение (5.23) принимает вид
i
i
i
А«» = E ЖГ J Ж'»М " d* + E W J V * dx + £ ^
0
0
J QMQn dx.
0
(5.24)
Каждое из равенств (5.22) — (5.24) носит название формулы
перемещений (интеграла, или формулы, Мора).
Определение перемещений с помощью полученной формулы
производится в следующем порядке:
1) находятся выражения усилий M ny N n и Qn от заданной на­
грузки как функции координаты x произвольного сечения;
2) по направлению искомого перемещения прикладывается соот­
ветствующая ему единичная сила (при линейном перемещении —
сосредоточенная сила, при угле поворота — сосредоточенный мо­
мент);
3) определяются усилия M m, N m и Qm от единичной силы как
функции координаты x произвольного сечения;
4) найденные выражения усилий М п, N n, Qnf M m, N m и Qm
подставляются в правую часть формулы (5.23) или (5.24) и интегри­
рованием по участкам в пределах всего сооружения определяется
искомое перемещение Дтп. Если Дтп положительно, то перемеще­
ние совпадает с направлением единичной силы, а если отрицатель­
но, то противоположно этому направлению.
В случае, если элемент конструкции представляет собой брус
малой кривизны, определение перемещений может выполняться по
формуле Мора, полученной для прямого бруса, с заменой элемента
длины dx в подынтегральном выражении элементом дуги ds.
Иногда, в частности при расчете статически неопределимых
систем, приходится определять взаимные перемещения отдельных
169
точек или сечений сооружений. В этом случае в направлении иско­
мого перемещения прикладывается обобщенная единичная сила
(при определении линейного перемещения) или обобщенный еди­
ничный момент (при определении взаимного угла поворота). На­
пример, если требуется определить изменение расстояния между
точками С и D оси рамы, изображенной на рис. 5.15, а, то следует
в точках С и D приложить единичные силы, направленные по линии
CD, как показано на рис. 5.15, б. Вычисление интеграла Мора про­
изводится по изложенным выше правилам, но при этом под единич­
ными внутренними усилиями M m, N m>Qm понимаются их значения,
соответствующие одновременному действию обеих единичных сил.
Рис. 5.15
В рассматриваемом случае, если результат вычислений интеграла
Мора получится положительным, то это будет указывать на то, что
направление искомого перемещения совпадает с направлением еди­
ничных сил, т. e. расстояние между точками С и D увеличивается;
знак минус указывает на уменьшение этого расстояния, т. e. на
сближение точек С и D.
Аналогично можно определить взаимный угол поворота любых
двух сечений рамы, например сечений, соответствующих тем же
точкам С и D . Для этого в указанных сечениях надо приложить
единичные моменты, действующие в противоположных направле­
ниях (рис. 5.15,e). В остальном вычисление перемещения произво­
дится обычным порядком.
Практически в большинстве случаев плоской задачи использу­
ется лишь один член формулы перемещений, а именно, если рас­
сматриваются сооружения, преимущественно работающие на изгиб
(балки, рамы, а часто и арки), то в формуле перемещений с соблю­
дением вполне достаточной точности можно оставить только ин­
теграл, зависящий от изгибающих моментов. При расчете сооруже­
ний, элементы которых работают в основном на центральное растя­
жение и сжатие (например, ферм), можно не учитывать деформации
изгиба и сдвига; в соответствии с этим в формуле перемещений ос­
тавляется лишь член, содержащий продольные силы. В случаб про­
странственной задачи формула перемещений (интеграл Мора) со­
держит не три члена (как в случае плоской задачи), а шесть — в со­
ответствии с числом внутренних усилий, которые могут возникать
170
в поперечных сечениях элементов. Эта формула имеет вид
А- . - Е 10 ж» ^ + Е 10 ж» -т7г+ Е 1ж»
^г+
0
+ 2 $ " • Ч г + Z $ « » Ч г - ч, + S K > т г 1 V
0
0
0
(5.25)
где Л42т и М уГп— изгибающие моменты относительно осей z и у
поперечных сечений соответственно, возникающие в единичном
состоянии; M zn и M ljn — то же, в действительном состоянии; Qzm
и Qljm — поперечные силы, параллельные соответственно осям z и у
поперечногосечения, возникающие в единичном состоянии; Qzn и
Qyn — то же, в действительном а] Дейстдительиое состояние
состоянии; М хт и М хп— крутящие
моменты, возникающие в единич­
ном и!действительном состояниях
~ ~
соответственно; N m и N n— про­ шШ
Uz
tfz
дольные силы в этих же состояни­
Ш нинно е состояние
ях; J K— геометрическая характе­
ристика крутильной жесткости (см.
§ 6.6): при круглом поперечном се­
чении J K—JP9 где Jp— полярный
момент инерции.
Практически в большинстве
случаев пространственной задачи
используются или только три пер­
вых члена последней формулы (ког­
да элементы системы работают пре­
имущественно на изгиб и круче­
ние, например при расчете прост­
ранственных рам и ломаных ба­
лок), или только четвертый член
формулы (например, при расчете
пространственных ферм).
В дальнейшем при расчете ба­
лок и рам влияние продольных и
поперечных сил на перемещение
не учитывается, за исключением
особо отмеченных случаев.
Рассмотрим в качестве при­
Рис. 5.16
мера балку постоянного сечения,
свободно лежащую на двух опорах (рис. 5.16, а) и нагруженную
посередине силой Рп. Определим прогиб балки под силой Рп с уче­
том влияния всех членов формулы Мора (5.24).
Единичным состоянием является состояние, вызванное единич­
ным грузом P m = l, действующим на балку в направлении искомого
перемещения (рис. 5.16,6).
Ч;
171
Продольные силы, возникающие в поперечных сечениях балки
от нагрузки, равны нулю. Поэтому второй интеграл формулы (5.24)
равняется нулю и эта формула принимает вид
/
i
^mn
= ^ £/J М тМ п &х + ^ g^rJQmQn d x = Amn + &тт
0
0
где А^п— прогиб, обусловленный деформацией изгиба (т. e. зави­
сящий от изгибающих моментов):
i
А'""= Х . ж ^ ^ “ м 'г dx;
о
А%п— прогиб, обусловленный деформацией сдвига (т. e. завися­
щий от поперечных сил):
A- = Z ^ H ^ Q „ d*.
0
Для сечений балки в пределах от левой опоры до середины
балки изгибающие моменты М п и М т и поперечные силы Qn и Qm
равны:
M n = ^ x - Mm = \ x - , Q „ = ^ ; Qm = Y Эпюры М п, M m, Q n и Qm изображены на рис. 5 Л 6 ,в,г,д ,е.
Эпюры М п и М т построены на сжатых волокнах балки.
Подставим значения моментов и поперечных сил в выражения
для Ам
*mn и
11 Д£„:
^m rt'
1/2
д"--ет I {
1/2
т
х ^
~
Ж
-
ЛЬ - < И т т ^ =
Pn4
4GF ’
Интегрирование ведется в пределах левой половины балки;
числовые коэффициенты 2 перед интегралами учитывают, что ввиду
симметрии балки величина интеграла для правой ее половины та­
кая же, как и для левой.
Полный прогиб
А ~
= ^mn
А м 4~AQ
Рп— 4^Г-£
^ •
^mn
i" ^mn —
~ 4g£V
4Qf
Знак плюс указывает на то, что направление прогиба совпадает
с направлением единичной силы.
Найдем соотношение между прогибами, зависящими от попереч­
ных сил и изгибающих моментов. Предположим при этом, что рас­
сматриваемая балка имеет прямоугольное понеречное сечение со
сторонами b и h и что ft= 0 ,l/:
Amn _P nr$4%EJ__12rj EJ
Лм
4GFPnP
l2GF
L*nin
172
Подставив в последнюю формулу значения J = bh3/ 12 = bt3/ 12 000;
F = b h = bl/10; r| = 1,2 и приняв G = 0,4£\ получим
Q
12-1,2’Ebl3' 10 J3_
дmn
л Г ~ 12000./2. 0 , 4 Ш
100 ’
дmn
т. e. прогиб, вызванный деформацией сдвига, составляет только
3% от прогиба, вызванного деформацией изгиба.
Влияние поперечных сил на прогиб тем меньше, чем меньше
отношение hIl. Так, при ft = //20
Q
дmn
м
дmn
м
Совершенно очевидно, что величиной А®п по сравнению с А„mn
можно пренебречь. Тогда
Amn = ^ n
= P J V ( 48E J ) .
Этот результат совпадает с результатом, известным из курса
сопротивления материалов.
§ 5.5. ПРАВИЛО ВЕРЕЩАГИНА
Определение перемещений в системах, состоящих из прямоли­
нейных элементов постоянной жесткости, можно значительно
упростить путем применения специального приема вычисления
i
интеграла вида ^ M mM n dx.
о
В связи с тем что в подын­
тегральное
выражение
входит произведение уси­
лий М т и М п, являющих­
ся ординатами эпюр, пост­
роенных для единичного и
действительного состояний,
этот прием называют спо­
собом перемножения эпюр.
Его можно использовать в
случае, когда одна из пе­
ремножаемых эпюр, нап­
ример М т , прямолинейна;
в этом случае (рис. 5.17)
М т= (x + a) tg а. Вторая
эпюра М п может иметь любое очертание (прямолинейное, ломаное
или криволинейное).
Подставим значение М т в выражение ^ M mM n dx:
'
'_
*
0
1
1 м тм п d* = t g a $ ( * + a ) A f „ d x = t g a $ ( * + a) dQ„,
173
где M n d x = d Q n—дифференциал площади Qn эпюры М п (рис. 5.17).
i
Интеграл ^(jt + a)d£2„ представляет собой статический момент
о
площади £2„ эпюры М п относительно оси 0 — О' (рис. 5.17).
Этот статический момент можно выразить иначе:
i
$(* + a)d fl,,= *A ,,te+ a),
0
где хс— абсцисса центра тяжести площади Qn эпюры Мл. Тогда
i
S М тМ п йх = (хс + а) Й„ tg a .
0
Но так как (см. рис. 5.17)
(xc + a) tg a = ус,
TO
1
\ м тМ п &х=&пус.
0
(5.26)
Таким образом, результат перемножения двух эпюр равен про­
изведению площади одной из них на ординату у с другой (прямоли­
нейной) эпюры, взятую под центром тяжести площади первой
эпюры.
Способ перемножения эпюр предложен в 1925 г. студентом Мос­
ковского института инженеров железнодорожного транспорта
А. К. Верещагиным, а потому он называется правилом (или спосо­
бом) Верещагина.
Заметим, что левая часть выражения (5.26) отличается от ин­
теграла Мора отсутствием в ней жесткости сечения EJ. Следова­
тельно, результат выполнения по правилу Верещагина перемноже­
ния эпюр для определения искомого перемещения надо разделить
на жесткость.
Очень важно отметить, что ордината у с должна быть взята обя­
зательно из прямолинейной эпюры. Если обе эпюры прямолиней­
ны, то ординату можно взять из любой эпюры. Так, если требуется
перемножить прямолинейные эпюры M t и M k (рис. 5.18, а), то не
имеет значения, что взять: произведение Qty h площади Qt эпюры
Mi на ординату у к под ее центром тяжести из эпюры M h или про­
изведение Qky t площади Qk эпюры M k на ординату y t под (или над)
ее центром тяжести из эпюры М г-.
Когда перемножаются две эпюры, имеющие вид трапеции, то
не надо находить положение центра тяжести площади одной из
них. Следует одну из эпюр разбить на два треугольника и умножить
площадь каждого из них на ординату под его центром тяжести из
другой эпюры. Например, в случае, приведенном на рис. 5.18, б%
174
получим
al
Ы
al [2с
d\
bl ( с . 2d\
2 /0
0, ,
2'^ a + 2 '^ /b - 2" (*3 "^ *3y ~Ь у ^T~^~ 3"J ~“ ~6 (2a c + 2 6d + ad + fo).
(5.27)
В круглых скобках этой формулы произведение ас левых орди­
нат обеих эпюр и произведение bd правых ординат берутся с коэф­
фициентом, равным двум, а произведения ad и bc ординат, располо­
женных с разных сторон,— с коэффициентом, равным единице.
'4
.
.
.,
l)
>)
Рис. 5.18
С помощью формулы (5.27) можно перемножать эпюры, имеющие
вид «перекрученных» трапеций; при этом произведения ординат,
имеющих одинаковые знаки, берутся со знаком плюс, а разные —
минус. В случае, например, показанном на рис. 5.18,e, результат
перемножения эпюр в виде «перекрученной» и обычной трапеций
равен (//6) (2ас—2bd+ad—bc), а в случае, показанном на рис. 5.18, г,
равен (//6) (—2ас—2bd+ad+bc).
Формула (5.27) применима и тогда, когда одна или обе перемножаемыеэпюрыимеютвидтреугольника. В этих случаях треуголь­
ник рассматривается как трапеция с одной крайней ординатой,
равной нулю. Результат, например, перемножения эпюр, показан­
ных на рис. 5.18, д, равен (l/6>)(2ac+ad).
Умножение эпюры в виде «перекрученной» трапеции на любую
другую эпюру можно производить и расчленяя «перекрученную»
трапецию на два треугольника, как показано на рис. 5.18, e.
175
Когда одна из эпюр (рис. 5.19) очерчена по квадратной па­
раболе (от равномерно распределенной нагрузки q), то ее для
перемножения с другой эпюрой рассматривают как сумму (в слу­
чае, показанном на рис. 5.19,a) или разность (в случае, пока­
занном на рис. 5.19,6) трапецеидальной и параболическойэпюр1.
Результат перемножения эпюр, показанных на рис. 5.19,a, равен
(l/6)(2ac + 2bd + ad + bc) + (2/3)elg', после подстановки в него e=s
p ctA-b
c^rd
=
f ---- 2 ~
и
£ = ~5-
п ол Уч аем
^ ( a c + 4 f g + b d ).
Результат перемножения эпюр, показанных на рис. 5.19,6,
равен (//6) (2ас + 2bd + ad + bc) — (2/3) elg\ после подстановки в
него e ^ ^ Y ~— / и ^f = ^ i ^ получаем
(l/6)(ac + 4fg + bd).
(5.28)
В обоих полученных выражениях в скобках стоят суммы про­
изведений крайних ординат обеих эпюр с учетверенным произведе­
нием средних ординат.
Встречаются случаи, когда ни одна из перемножаемых эпюр
не является прямолинейной, но одна из них (или обе) ограничена
ломаными прямыми линиями. В этих случаях для перемножения
эпюр предварительно разбивают их на такие участки, в пределах
каждого из которых, по крайней мере, одна эпюра прямолинейна.
Так, например, при перемножении эпюр, показанных на рис.5.20,а,б,
можно разбить их на два участка и представить результат пере­
1 Средняя ордината параболической эпюры e=qP/8.
176
множения в виде суммы &1у 1 + & 2у 2. Можно, перемножая эти же
эпюры, разбить их на три участка, как показано на рис. 5.20, e, г;
в этом случае результат перемножения эпюр равен
S2it/i+Q гУгН^зУз*
При использовании правила Верещагина приходится вычислять
площади различных геометрических фигур и определять положения
их центров тяжести. В связи с этим в табл. 5.1 приведены значения
площадей и координаты центров тяжести наиболее часто встречаю­
щихся геометрических фигур.
В качестве примера рассмотрим применение способа Верещаги­
на для определения прогиба под силой Рп балки, изображенной на
рис. 5.16,a; при этом учтем действиеизгибающихмоментов и по­
перечных сил.
Единичное состояние балки, а также эпюры внутренних усилий
в ней, вызванных нагрузкой Рп и единичной силой Рту показаны на
рис. 5.16, бу в, г, д, e.
По формуле (5.24), используя способ Верещагина при перемно­
жении эпюр, находим
Л _ 2 Pnt t 1 2 / , 2n Рп 1 i
P J 3 . Рпц1
mn
EJ 4 2 2 3 4 ^ G F 2 2 2 ~ 4 8 E J ^ 4G f
Этот результат совпадает с результатом, полученным путем ин­
тегрирования.
Определим теперь горизонтальное смещение точки С рамы, изо­
браженной на рис. 5.21, а. Моменты инерции поперечных сечений
стоек рамы и ригеля указаны на рисунке; f = c o n s t;
Действительное состояние рамы изображено на рис. 5.21, а.
Эпюра изгибающих моментов Мр для этого состояния (грузовая
эпюра) показана на ри . 5.21, б.
В единичном состоянии к точке С рамы приложена в направлении
искомого перемещения (т. e. горизонтального) сила, равная еди­
нице. Эпюра изгибающих моментов M для этого состояния (еди­
ничная эпюра) изображена на рис. 5.21,e.
Знаки изгибающих моментов на эпюрах могут не указываться.
Здесь ординаты эпюр отложены со стороны сжатых волокон, но
можно строить их и со стороны растянутых волокон.
177
T а б л и ц а 5.1
Геометрическая фигура
.
£/
fc*" !^
_.. i________
II
^-
x
Площадь
Q
Квадраты центра тяжести
^i
^2 г
I>
Ы
JI2
t/2
-------------- ^-
Так строят эпюры моментов в курсе «Сопротивление материалов».
Можно построить эти эпюры и со стороны растянутых волокон, как
обычно строят в строительной механике.
Перемножив по способу Верещагина грузовую эпюру с единич­
ной (рис. 5.21, б, в) и учтя при этом различные значения моментов
инерции поперечных сечений стоек и ригеля рамы, найдем искомое
178
перемещение точки С:
Лс
Phh. 2 3 h EJ^
Ph3
3EJ i
PhaT h W 2
Pah2
2EJ 2 - - 3 K * + * ) -
_Знак минус при перемножении эпюр взят потому, что эпюры Мр
и Л4 расположены с различных сторон элементов рамы и, следова­
тельно, изгибающие моменты Мр и M имеют разные знаки. Отри­
цательное значение полученного перемещения точки С означает,
что эта точка смещается не по направлению единичной силы
(рис. 5.21, в), а в противоположную сторону, т. e. вправо.
Приведем теперь некоторые практические указания по приме­
нению интеграла Мора к различным случаям вычисления переме­
щений.
Определение перемещений в балках, жесткость сечений которых
постоянна по всей длине или в пределах отдельных участков, целе­
сообразно производить, вычисляя интеграл Мора по правилу Вере­
щагина. To же относится и к рамам из прямолинейных стержней
постоянной или ступенчато-переменной жесткости.
При жесткости сечений элемента конструкции, непрерывно изме­
няющейся по его длине, перемещения должны определяться путем
непосредственного (аналитического) вычисления интеграла Мора.
Такую конструкцию можно рассчитать приближенно, заменив ее
системой с элементами ступенча­
то-переменной жесткости, после
чего для определения перемеще­
ний использовать способ Вере­
щагина.
Способ Верещагина может
применяться не только при опре­
делении перемещений, но и при
0,3PL ^ W
определениипотенциальной энер­
гии.
0,5Pl
*J
§ 5.6. ПРИМЕРЫ РАСЧЕТА
= г а ж ц щ а д щ щ
Пример 1 (к § 5.1, 5.4 и 5.5). Оп­
ределить работу внешиих сил, дейст­
вующих на балку, изображенную на
v
рис. 5.22, а. Задачу решить двумя прие­
мами; а) выразив работу через внутрен­
ние усилия, возникающие в поперечных
сечениях балки; б) выразив работу че­
Рис. 5.22
рез внешние силы и значения соответ­
ствующих перемещений.
P e ш e н и e. а) Эпюра изгибающих моментов M v от нагрузки показана на
рис, 5.22, б% По формуле (5.9) определяем работу внешних сил:
£
i
M l ck.
179
Интеграл ^ M \ dx представляет собой результат умножения эпюры М р
о
(рис. 5.22, б) на ту же эпюру М р. Перемножение этих эпюр производим по
способу Верещагина:
l
£
J A f J d * = 0 , 5 P / . 0 , 5 / - - ^ - 0 , 5 P / + ^ (2•0,3Pl•0,3Pl+ 2•0,2P/•0,2Pl —
0
P 2 /3
Л 0 7 p 2 /3
— 0,3P/ •0,2P/ —0,3P/ •0,2P/) —^ ~ + ^ ^ ^ — = 0,0533P2/3.
Здесь перемножение эпюр М р для правой половины балки выполнено по фор­
муле (5.27).
Подставим полученное значение интеграла в выражение
Л =0,0267Р2/3/(£7).
б)
Определим сначала прогиб А* балки под грузом и угол поворота А2
поперечного сечения балки, в котором приложен момент M (рис. 5.22, а). Для
этого в направлениях искомых перемещений прикладываем единичную силу
(рис. 5.22,e) и единичный момент (рис. 5 .2 2 ,г^ и строим от этих единичных
нагрузок эпюры изгибающих моментов М± и М 2 (рис. 5.22,в,г). Определение
перемещений производим по формуле (5.24). Для этого перемножаем по спо­
собу Верещагина эпюры М р и Мь а затем эпюры Мр и М2:
* ■ -1 7 [ “■5 P / . 0 , 5 / - . y . 0 , 5 / + ^ ( - 2 - 0 , 3 P / - 0 , 5 P / + 2 - 0 ,2 P l-l-0 ,3 P l-l +
PP
+ 0,2P/.0,5/)j
30E J
1 /
I
I \
Pl2
А2= 4£т/ (^V|W*
0 ,3 P /*V0|W
,5 /~
2 -1— 0,2P/*
v,~* 0,5/*~*
V|W 2 I-yW—40£y
При вычислении Д2 принято, что эпюра М р на правой половине балки
состоит из двух треугольников (см. рис. 5.I8,e).
По формуле (5.4) находим работу внешних сил:
P/3
Pl2
PJLоfiPi
А Р А, , M А2 _
3 0 £ / , v’u 4 0 £ / _ Л ЛОС7Р 2/3
Л-
2 ‘
2 “
2
+
2
—U’Ut , / £ / '
Этот результат совпадает с полученным выше (см. п. а).
Пример 2 (к § 5.4 и 5.5). Определить горизонтальное перемещение точкиО
рамы, изображенной на рис. 5.23, а.
P e ш e н и e. Эпюра изгибающих моментов М р от нагрузки показана на
рис. 5.23, б.
Г^рЛсладываем в направлении искомого перемещения единичную силу и
строим от нее единичную эпюру изгибающих моментов M (рис. 5.23, в).
По формуле (5.24), перемножая эпюры М р и M способом Верешагина, оп­
ределяем искомое перемещение Ах; при этом учитываем, что моменты инерции
поперечных сечений элементов рамы различны:
да 2
А^
I За
1
, да2
1
. 2a ( 0 д а 2
0 3qa2
да2
3qa2
\
- а Т ~ Ж Г + ^ ааШ [ + ^ { 2- ^ а + 2 - ^ а- ^ а- Л ~ а) х
1
23qa*
X EJ2 24EJi
При перемножеиии эпюр учтено, что площадь эпюры М р на участке C D рамы,
ограниченная вогнутой квадратной параболой, равна одной трети произведения
180
наибольшей ординаты иа длину элемента, т. e.
(1/3)(qa2l2) a=qcP/6.
Центр тяжести этой параболы расположен на расстоянии a!4 от точки С рамы
(см. табл. 5.1), и, следовательно, ордината эпюры M, соответствующая его поло­
жению, равна За/4.
Рис. 5.23
Пример 3 (к § 5.4). Определить полное линейное перемещение точки А оси
6p>ca малой кривизны (рис. 5.24, а) и угол поворота поперечного сечения, про­
ходящего через эту точку.
P e ш e н и e. Так как направление искомого перемещения заранее неизвест­
но, определим отдёльно его горизонтальную и вертикальную составляющие, а за­
тем найдем полное перемещение как
геометрическую сумму указанных сос­
тавляющих.
Влияние продольных и поперечных
сил в соответствии с приведенным ука­
занием учитывать не будем.
Изгибающий момент от заданной
нагрузки в произвольном сечении бру­
са определится ' из выражения М р—
= PR sin ф.
Ф \А
Для нахождеиия горизонтального
перемещения в точке А прикладываем
горизоитально направленную единич­
Рис. 5.24
ную силу (рис. 5.24, б). Соответствую­
щее состояние систех'ы будем называть
п e p в ы м. Выражение единичного изгибающего момента для этого состояния
имеет вид
M j = l • R sin ф.
По формуле Мора,
Знак плюс указывает на совпадение действительного направления горизон­
тального перемещенияточки А с принятым направлением единичной силы
(рис. 5.24, б).
Определяем вертикальное перемещение точки А . Для этого прикладываем
к брусу вертикально направленную единичную силу, как показано на рис. 5.24, в.
Соответствующее состояние системы будем называть в_то p ы м; изгибающие мо­
менты от единичиой силы в этом состоянии обозначим М 2. По рис. 5.24, в устанав­
ливаем
М 2— — 1• R О — соэф).
По формуле Мора,
л
l
PR sin ф [— R (1 - cos ф)] R c^
А,2p
EJ
PR3
sin ф + sin ф соз ф) c^ = 'g j "
cos ф
rsin; Ф \ Л —
2PR*
~ЁГ~
Знак минус указывает, что точка А перемещается противоположно прило­
женной едииичной силе, т. e. вверх. Полное перемещение точки А:
v
PR3
2EJ J " ^ E J J — E J
Для определения угла поворота се­
чения А прикладываем в этом сечении
момент, равный единице (рис. 5.24, г).
Соответствующее состояние системы назо­
вем т р е т ь и м . Очевидно, М 3~ 1.
Искомое перемещеиие
l
МрМъ ds
EJ
n
- f0
Рис. 5.25
182
PR sin ф*1• R dф
EJ
2P R ‘
EJ
Сечение поворачивается по направле­
нию приложенного единичиого момента,
т. e. против часовой стрелки.
Пример 4 (к § 5.4 и 5.5). Определить
вертикальиое перемещение Дс точки С бал­
ки, защемленной левым концом и нагружеиной равномерно распределенной иагрузкой (рис. 5.25, а).
P e ш e н и e. Строим грузовую эпюру
изгибающих моментов М р (рис. 5.25, б).
Затем по направлению искомого переме­
щения прикладываем единичную силу и
строим от нее единичную эпюру изгибаю­
щих моментов M (рис. 5.25, в).
Для определения Ас необходимо пе­
ремножить эпюры Мр и М. Это можно
сделать различными приемами; рассмот­
рим три из иих:
1-й прием. Эпюру М р иа левой половииебалкирассматриваем как состоящую
из трапеции 1—2—6—3—4—1 с отрицательными ордииатами и из выпуклой квад­
ратной параболы 2—6—3—5—2 с положительными ординатами (рис, 5.25, 6)*
Наибольшая ордината параболы
( l / 2) *_qP
32
Перемиожим эпюры Мр и M:
A
1 Г 1 1 1 ( 2 qP
&С~~ЁТ L T J T
1 qP
V T 'T + T '
8
'ql2 1 1 2- 1 ]
32 ' 2 3 ’ 2 ' 2
J
17^/4
2-w прием. Отбрасываем правую половину балки, а ее влияние на левую
заменяем моментом M=qP/8 и силой Q—qll2, действующими в сечении С балки
(рис. 5.25, г). Эпюра изгибающих моментов М р для оставшейся левой половииы
балки показана на рис. 5.25, д; она такая же, как и эпюра 1—2—5—3 J K /,
изображенная на рис. 5.25, б. Разбиваем эпюру Мр иа составляющие части
(рис. 5.25, д), к которым относятся:
а) эпюра, имеющая вид прямоугольника с ордииатами qPi8 (от момента М —
-q P /8 , действующего в сечеиии С балки);
б) эпюра, имеющая вид треугольника с наибольшей ордииатой qPl4 (от по­
перечной силы Q=qli2, действующей в сечении С);
в) эпюра в виде вогиутой квадратной параболы с наибольшей ординатой
qP/8 (от равномерно распределенной иагрузки q, приложенной к левой половиие
балки).
Умножим каждую из указаиных частей эпюры М р (рис. 5.25, d) на единич­
ную эпюру (рис. 5.25, в) и сложим получеииые произведения:
Д,
1 (qP 1 l
qP 1 1 1 , qP 1 1 3/ \
EJ [ 8 ’ 2 ’ 4 + 4 ‘ 2 * 2 ‘ 3 ^ 8 ' 2 ' 3 * 8 J
l7ql*
3-й прием. Перемножим эпюры М р (рис. 5.25, б) и M (рис. 5.25,в)поформуле (5.28):
17qP
Д сг 2-6E
' J
8
■Пример 5 (к § 5.4 и 5.5). Определить вертикальное перемещение балки в точке
приложения силы Р. Левый конец балки опирается на шарнирно неподвижную
опору, а правый — поддерживается
тягой, шариирно соединенной с бал­
кой (рис. 5.26, а). Жесткость сечеиия
балки E J , жесткость сечеиия тяги EF.
//д
P e ш e н и e. В рассматриваемом
случае один из элементов системы рабо­
тает на изгиб (балка), а другой — иа
растяжение (тяга). При вычислении
интеграла Мора для балки следует
учесть только смещение, вызванное из­
гибающими моментами. В тяге возни­
кает только одно внутреннее усилие —
продольная сила N; поэтомудля учета
ее деформации надо вычислить соответ­
ствующий члеи иитеграла Мора.
Таким образом, формула для опре­
деления перемещений получает вид
l
=1
MpM dx
ш
N pN dx
EF
183
Прикладываем к балке в направлении искомого перемещения единичную
силу и строим эпюру M (рис. 5.26, б). Эпюра Мр изображена на рис. 5.26,a.
Первое слагаемое определяем по правилу Верещагииа:
I
о
МрМ dx
1
EJ
~~ E J
„ ! 1 pi l \ 2 1
V2 4 2 J 3 4
Pl3
48£7
Усилия в тяге при действии задаииой и единичной сил
Np = P/2;
N = 1/2;
соответствующие эпюры представлены на рис. 5.25, a, б. Перемножая их по пра­
вилу Верещагииа, определяем второе слагаемое в формуле перемещений:
а
о
Np Nd x EF
p
2
1 1
2 EF
48EJ
1 4EF
Pa
4EF
Окончательно получаем
Пример 6 (к § 5.4 и 5.5). Определить горизонтальиое перемещение Д точки D
пространственного бруса (рис. 5.27, a) в направлении, параллельном элементу
A B , и угол поворота & поперечного сечения D в плоскости BCD. Поперечные се­
чения всех элементов бруса круглые, одинакового диаметра d. К свободному концу
D бруса приложена сила Я, параллельная элементу fiC.
P e ш e н и e. На рис. 5.27, б, в изображены эпюры изгибающих М р1 и кру­
тящих УИр моментов от действующей на брус силы Р.
Ординаты эпюры изгибающих момеитов отложены со стороиы сжатых волокон
бруса; знак крутящик моментов (в элемеите AB) отрицателен, так как если смот­
реть иа торец В , действующий на него крутящий момеит будет направлен против
часовой стрелки.
Для определения перемещеиия Д прикладываем в точке D единичную силу,
параллельную элементу AB (рис. 5.27, г). Эпюры изгибающих М \ и крутящих
Mi моментов от действия этой силы показаны на рис. 5.27, д, e.
Перемещения определяем по формуле (5.25), учитывая лишь первые три
ее члеиа. Умножая по способу Верещагина эпюру M^ (рис. 5.27, б) на эпюМ? (рис. 5.27, д) и эпюру Мр (рис. 5.27, в) на эпюру Щ (рис. 5.27, e),
py Л??
получаем
где
J-n d * /6 4 .
Изгибающие моменты перемножены только па участке AB бруса, так как на
участках ВС и CD изгибающие моменты от заданной нагрузки (рис. 5.27, 6) и от
единичной силы (рис. 5.27, d) действуют в разных плоскостях. Результат перемно­
жения эпюр крутящих моментов равен нулю, так как от заданной иагрузки они
возникают лишь в элемеите AB (рис. 5.27, в), а от единичной силы — только в эле­
менте ВС (рис. 5.27, ё).
Для определения угла поворота fr прикладываем к сечению D бруса единичиый момент, действующий в плоскости BCD (рис. 5.27, ж). Эшоры изгибающих
моментов М \ и крутящих моментов Мъ от действия этого момента показаны на
рис. 5.27, з, и.
Умножая эпюру M^ (рис. 5.27, 6) на эпюру M ” (рис. 5.27, з) и эпюру Мр
184
(рис. 5.27, в) иа эпюру Atf” (рис. 5.27, и), находим
ft = ( ^ - l + P a . 0 , 8 ^ l ) ^ + P a . l , 2 a . l . ^ - = l , 3 ^ - + l , 2
где
Ра2
JpP = nd*i 32.
§ 5.7. ТЕМПЕРАТУРНЫЕ ПЕРЕМЕЩЕНИЯ 1
Формула Мора (5.22)— (5.24) может быть представлена ввиде
i
i
i
Д„„ = 2 S м вд ФВ+ 2 S ^ A * + 2 $ Q «\«*
(5.29)-
1 См.: Строительная механика / Под ред. А. В. Даркова. М., 1976, с. 233.
185
где A^n = M n dx!{EJ) — взаимный угол поворота торцовых сечений
элемента dx стержня отзаданной нагрузки; Axn — N n dx/(EF)—взаим­
ное смещение их в направлении осистержня; Ayn = Qnv\dx/(GF) —
взаимное смещение их в направлении нормали к оси стержня
(см. § 5.1).
В таком виде формула Мора может быть использована, когда
деформации Аф„, АХПУ Ауп элемента йгстержня вызваны не только
внутренними усилиями в его поперечных сечениях от нагрузки, но и
действием температуры на соору­
жение. Следовательно, формулой
Мора в приведенном виде можно
пользоваться и для определения
перемещений системы, вызванных
действием температуры.
Пусть верхнее волокно элемен­
та dx нагрето на tu а нижнее —
на *2, °С (рис. 5.28).
Распределение температуры по
высоте поперечногосечения примем
a t2dx
ttt2dx
по прямолинейному закону.
При температурном коэффи­
Рис. 5.28
циенте линейного расширения а
удлинение верхнего волокна равно atxdxf а удлинение нижнего
волокна составляет a t2dx. Осевое удлинение Axn= A xt можно по­
лучить как среднее арифметическое указанных величин (при попе­
речном сечении, симметричном относительно горизонтальной оси):
д ^ « (M -* 2) d
^xn —
2
Угол взаимного поворота крайних поперечных сечений (эле­
мента dx) равен:
А __ д __ a (*i
^ ) лг
^ Ф n — ^q>t — ------ д------ GX.
Деформации сдвига в элементе dx от действия температуры не
возникают, т. e. A ^ = 0.
Подставив найденные значения в выражение (5.29), получим
формулу для отыскания температурных перемещений1:
i
i
A-f = 5 ^ H r * I ^ - * * * + S * * " T ^ j ^ - d * (5-30)
0
0
Знаки 2 означают суммирование по всем стержням и участкам
сооружения.
При вычислении перемещения Amt интегрирование распростра­
няется лишь на те элементы сооружения, температурный режим ко­
1
Предполагается, что вдоль каждого стержня (или участка) задаиное изме­
нение температуры одинаково и высота h каждого элемента также постаянна по
всейбгодлине.
186
торых изменился. Для случая прямолинейных или ломаных стерж­
ней постоянного сечения интегралы могут быть подсчитаны как
площади единичных эпюр, и формула перемещений принимает
простой вид:
ti —to *v , ж 1 t\ ^- 12
(5.3l)
Здесь fi^- и Qjy — площади единичных эпюр M и N.
При поперечном сечении элемента, несимметричном относитель­
но горизонтальной оси, в формулы вместо (^i+ ^)/2 входит выраже­
ние ^2+t(^i—t2)/h\ у , где у — расстояние от нижнего волокна эле­
мента до горизонтальной оси, проходящей через центр тяжести
поперечного сечения.
Знаки членов формулы Amt определяют так: если деформации
элемента dx от температуры и от единичной силы аналогичны, то
знак соответствующего члена будет положительным, и наоборот.
При определении перемещений от действия на сооружение тем­
пературы нельзя пренебрегать членом формулы, зависящим от
продольной силы.
Пример. Для ломаного бруса, изображенного на рис. 5.29, a, отыскать верти­
кальное перемещение точки С, если температура снаружи ие изменилась, а внутри
повысилась на Ю°С (рис. 5.29, a).
*)
+0°
* 0 *X*W0С
mz
P e ш e н и e. По направлению искомого перемещения прикладываем еди­
ничную силу и строим от нее зпюры N и M (рис. 5.29, б, в).1
Подсчитаем площади единичных эпюр:
Q -—1-a a; Q j ^ = ( a a / 2 ) ^ a a - l , 5 a 2.
N
Найдем температурные сомножители:
(*i+*a)/2=(0+l0)/2=5; \ty-t,]= l0-10l= 10.
Последняя запись указывает на то, что разность температур берется по абсолют­
ной величин*.
Температуриое воздействие вызывает удлинеиие внутреиних волокон бруса,
а единичная сила — их укорочение; поэтому у члена формулы температуриых пере­
мещений, учитывающего изгибающие момеиты, следует поставить зиак минус. Знак
минус надо поставить и перед членом с продольной силой, так как измеиение тем­
пературы вызывает удлинение стойки, а действие единичной силы — укорочение
стойки. Таким образом,
A m t ~ — 5a а— 15a (а2/И).
1 Здесь ординаты эпюры M отложены со стороны растянутых волокон.
187
§ 5.8. ЭНЕРГЕТИЧЕСКИЙ ПРИЕМ ОПРЕДЕЛЕНИЯ
ПЕРЕМЕЩЕНИЙ 1
Энергетический прием определения перемещений основан на
теореме о том, что частная производная от выражения потенциаль­
ной энергии по «силе» P (понимая под P обобщенную силу) равна
вызванному нагрузкой перемещению по направлению этой силы
(теорема Кастильяно).
Для доказательства этой теоремы составим выражение потен­
циальной энергии, ограничившись для краткости только членом,
зависящим от изгибающих моментов [см. формулу (5.11)]:
"-Е 1 т £ г0
Полное значение изгибающего момента разложим на состав­
ляющие, соответствующие отдельным силам:
M = М ХР ! + M 2P 24- . . . + M kP к + . . . ^ М пР п.
Здесь M l9 М 2, . . . , M k, . . . , М п— значения изгибающих моментов,
вызываемых единичными силами Р х = 1, Р 2 = 1, .. -, P k =
= l,...,^ = L
Возьмем частную производную от выражения U по P k:
dU __ д f v С M- d x \ _ v Г M W k dX
дРк
dPk \ 2 u ) 2EJ J ' 2-J
EJ
•
4
0
/
0
но
следовательно,
^
дРк — Ъ
dU
/_
С MfcAl dx
J
о
EJ
-
В правой части получепо выражение перемещения Акр (см. фор­
мулы перемещений в § 5.4), а потому
ди _ \
дРк - * b p '
Теоремой Кастильяно для отыскания перемещений стержневых
систем практически не пользуются, она представляет чисто теорети­
ческий интерес. Последовательность расчета при ее применении
такова:
1) к сооружению прикладывается соответствующая «сила» в том
направлении, в котором отыскивается перемещение;
2) составляется полное выражение потенциальной энергии от
совместного действия приложенной «силы» и нагрузки;
1 См. Строительная механика/ Под ред. А. В. Даркова. М., 1976, c.243.
188
3) путем дифференцирования выражения потенциальной энер­
гии по приложенной «силе» получится формула, определяющая
искомое перемещение, в которой затем необходимо приравнять
значение приложенной «силы» нулю, так как она не входит в состав
нагрузки (или действительному ее значению, если она входит в
состав нагрузки).
П р и м ер . Найти угол п о в о р о т а ф к о н ц а к он сол и от действия н а пее р а в н о м е р ­
н о распред ел енной н а г р у з к и и н т ен си в н ост ь ю q (р н с. 5 .3 0 , а ).
P e ш e н и e.
П ри к л ад ы в ае м
на
л
к он ц е к ои сол и момент M (р и с. 5 .3 0 , б).
J
П о л н о е в ы р аж е н и е и зг и б аю щ е г о м о­
^ >[ >Г>I )Vjf_y x, xr >
мента в сечепнп x имеет вид
t уf ' t >t V\ г
Ai =
t
/
M2 d;
U=
-f*
0
1
+ м ).
П од считы ваем
эн ерги ю :
п от ен ц и ал ь н у ю
( 9^
2E J
гпх
~* /^
~~~~~—
^
+Af)'
dx.
2EJ
0
s)
Щ Ш Ш ЙЩ 1i iXi \ I
1
I
^ ----------- ~ _ ^ .
Рис. 5.30
П о с л е и н т е г р и р о в а н и я п ол учим
U =
Д иф ф ереиц ируем
cp =
U
1
fq 4 *
qPM
E J
\ 40
6
. МЧ
по M :
__
dU \
дМ j м = о
1
qP
E J
6
+ M- 1
=
qP
6EJ
Е сл и в со ст а в е заданной н а г р у з к и им еется со о т в е т ст в у ю щ а я и ск о м о м у п е р е ­
м ещ ению «си л а», т о отп ад ает н е об ход и м ост ь в п р и л о ж е н и и дополнительной «силы ».
П у ст ь , н а п р и м е р , т р еб у ет ся найти п р о г и б к о н ц а кои сол ьн ой б ал к и , з а г р у ж е н ­
ной толы со одной сосред от очен н ой силой P , п ри л ож ен н ой т а к ж е н а к он ц е,
В этом сл у ч ае
M ^-P x;
U =
n Р *Х 2
\ ^т гт - dx
2E J
p-2 /з
6EJ
0
A =
dU
PP
дР
3E J
§ 5.9. ПЕРЕМЕЩЕНИЯ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ
ВЫЗЫВАЕМЫЕ ПЕРЕМЕЩЕНИЯМИ ОПОР
СИСТЕМ,
При перемещениях опор статически определимого сооружения
по направлениям опорных закреплений внутренние усилия в соо­
ружении не возникают.
В качестве примера рассмотрим раму, изображенную на
рис. 5.31, а. Предположим, что в результате размыва грунта под
фундаментом или по какой-либо другой причине шарнирно подвиж­
ная опора рамы, схематически изображенная вертикальным стерж­
нем В, переместилась по вертикали, т. e. по направлению опорного
189
стержня, на величину А. Такое смещение опоры не вызовет в соо­
ружении внутренних усилий.
Определим перемещение точки k системы по направлению i — t,
т. e. перемещение АгД. Для этого создадим единичное состояние
данной системы и в направлении искомого перемещения приложим
к ней силу X i = 1 (рис. 5.31, б). Опорную реакцию, возникающую
(в единичном состоянии) от силы X* = 1 в том опорном стержне,
который в действительном состоянии сооружения перемещается
на величину А, обозначим R.
На основании теоремы о взаимности работ для двух состояний,
изображенных на рис. 5.31, а, б, в одном из которых (в действитель­
ном) сооружение не загружено (т. e. как бы находится под действи­
ем нулевой нагрузки), можно составить следующее уравнение:
Х { А;Л - *A = 0,
или
1 *Д*д — ^A — 0,
откуда
AtA = RA,
т. e. перемещение Д*д какой-либо точки заданного статически опре­
делимого сооружения, возникающее от линейного смещения опоры
на величину А, равно произведению смещения А на реакцию связи
(которая в действительном состоянии смещается на величину А)
от действия единичной нагрузки, приложенной в направлении иско­
мого перемещения. Это перемещение положительно, когда реакция
связи направлена обратно смещению А, и отрицательно, когда она
совпадает с ним.
Тот же результат можно получить, если составить следующее
равенство работ:
X i8iil2+ X iA ^-R A = X i8a/2.
Левая часть этого уравнения представляет собой работу всех
сил, в том числе и опорных реакций, приложенных к заданной
статически определимой системе (рис. 5.32, а), которую они совер­
шат в случае, если перемещение опоры В начнется после того, как
J9Q
закончится статическое нарастание силы X* = 1. Правая же часть
уравнения представляет собой работу тех же сил в случае, если
сначала произойдет смещение опоры В и лишь после этого на систе­
му начнет действовать статически нарастающая сила X f= l
(рис. 5.32, б). Левая часть уравнения равна правой потому, что
окончательная деформация системы в обоих случаях будет одна и
та же; это позволяет утверждать, что потенциальная энергия, на­
копленная в системе в первом случае (равная сумме слагаемых
левой части уравнения), будет равна потенциальной энергии (рав­
ной правой части уравнения), накопленной во втором случае.
Из полученного уравнеQ\
ния следует (учитываем, что
'
X t= l):
Д , д — R Д.
Этот же результат был по­
лучен нами выше на основа­
нии теоремы о взаимности ра­
бот.
Рассмотрим теперь шар­
нирную балку, показанную на
Рис. 5.33
рис. 5.33, а, левая опора ко­
торой (заделка) повернулась на угол Дср. При этом левый конец
балки также повернулся на угол Дф. Определим вертикальное
перемещение Д£ точки С балки. Для этого создадим единичное
состояние балки и в направлении искомого перемещения приложим
к ней силу X i = 1 (рис. 5.33, б). На основании теоремы о взаимности
работ для двух состояний, изображенных на рис. 5.33, можно со­
ставить уравнение
Х*Д£+0,5/х.Дф=0,
или
Ь Д £+ 0,5/!-Д ф = 0,
откуда
Д £=—0,5/1-Дф.
Знак минус указывает на то, что точка С переместилась в сто­
рону, противоположную направлению силы X t= 1, т. e. вверх.
191
Рассмотрим теперь общий случай, когда одновременно происхо­
дят перемещения в направлениях нескольких опорных закрепле­
ний статически определимого сооружения. В качестве конкретного
примера рассмотрим систему, изображенную на рис. 5.34, а. Штри­
ховой линией показано новое положение системы, вызванное сме­
щением правой опоры по вертикали и горизонтали соответственно
на а и b.
Определим угол поворота узла E заданной системы. Для этого,
решая задачу с помощью теоремы о взаимности работ, создадим еди­
ничное состояние системы (рис. 5.34, б), приложив к ней в направ­
лении искомого углового перемещения единичный момент X t. Под
влиянием этого момента на правой опоре возникнут реакции R 1 и
R 2y соответственно равные 1II и M(2h),
Составим следующее равенство работ для двух состояний систе­
мы — действительного (рис. 5.34, а) и единичного (рис. 5.34, б):
X i А^д—R 1a ^ rR 2b=Ot
откуда (так как X*=1) A ^ = ^ a —R 2b.
Подставив значения реакций R ± и R 2, получим
A ^= a /l-b /(2 h ).
Итак, для определения перемещения, Еозникающего в статичес­
ки определимом сооружении от смещения его опор (в направлениях
опорных закреплений), необходимо:
1) выбрать единичное состояние сооружения, считая смещаю­
щуюся связь неподвижной;
2) загрузить сооружение (в единичном состоянии) в направле­
нии искомого перемещения силой или моментом X i = 1;
3) определить реакции в тех опорных связях единичного состоя­
ния, которые в действительном состоянии сооружения смещаются;
4) составить выражение работы сил единичного состояния на
перемещениях действительного и приравнять его нулю;
5) решить полученное уравнение относительно искомого пере­
мещения.
192
Главa 6
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
МЕТОДОМ СИЛ
§ 6.1. СТАТИЧЕСКАЯНЕОПРЕДЕЛИМОСТЬ
Статически неопределимой системой называется система, опре­
деление усилий в которой невозможно с помощью одних лишь урав­
нений статики. Например, балочная система, имеющая более трех
опорных стержней (рис. 6.1, а), является статически неопредели­
мой; такая неопределимость обычно называется внешней.
ё)
с)
Рис. 6.1
Кроме того, сооружения могут быть неопределимы по своему
внутреннему образованию. В этих случаях неопределимость назы­
вается внутренней. Примером такой системы может служить ферма,
изображенная на рис. 6.1, б; она имеет один лишний стержень и
поэтому однажды статически неопределима по своему внутреннему
образованию. Число неизвестных усилий, возникающих в ее опо­
рах, равно трем; следовательно, внешне эта ферма является ста­
тически определимой. В дальнейшем покажем, что деление неопре­
делимости на внешнюю и внутреннюю для систем с числом внешних
связей более трех достаточно условно.
Характерной особенностью статически неопределимых систем
(в отличие от статически определимых) является то, что распреде­
ление усилий в них зависит не только от внешних сил, но и отсоотношений между поперечными размерами отдельных элементов.
Если элементы системы изготовлены из различных материалов, то
распределение усилий зависит также от модулей упругости этих
материалов. Другая особенность — смещение-опор, температурные
воздействия и неточность сборки конструкции обычно вызывают
7
Jft 2 4 1 8
193
появление в таких системах дополнительных усилий, что не про­
исходит в статически определимых системах.
Расчет статически неопределимой системы начинается с анализа
ее схемы. Анализ необходим прежде всего для того, чтобы устано­
вить степень статической неопределимости и, следовательно, число
необходимых допблнительных (к уравнениям статики) уравнений —
уравнений перемещений.
Разность между числом неизвестных усилий в сооружении и чис­
лом независимых уравнений статики, которые можно составить при
расчете этого сооружения, определяет степень его статической не­
определимости.
Эта разность равна числу так называемых лишних связей 1 в соо­
ружении, удаление которых превращает заданную статически неоп­
ределимую систему в определимую, не нарушая геометрической не­
изменяемости сооружения. Геометрически неизменяемой называ­
ется такая система, изменение формы которой возможно лишь в
связи с деформациями ее элементов.
Приведем примеры статически неопределимых систем. Нераз­
резная балка, лежащая на трех опорах, одна из которых шарнирно­
неподвижная (рис. 6.1,a), является системой один р а з в н е ш н е 2
статически неопределимой, так как для любой плоской системы сил,
находящихся в равновесии, статика дает всего лишь три уравнения.
В состав этих уравнений в данном случае войдут четыре неизвест­
ных; следовательно, задачу статически (т. e. с
помощью одних лишь уравнений статики) ре­
шить невозможно. Дополнительные (недоста­
ющие) уравнения составляются на основе
изучения деформаций системы. В данном слу­
чае необходимо составить одно такое урав­
нение деформаций.
Помещенная на рис. 6 Л ,в прямоугольРис. 6.2
ная замкнутая рама 3 опирается на землю тре­
мя стержнями и, таким образом, в отноше­
нии опорных закреплений является системой внешне статически
определимой. По своему же внутреннему образованию она является
системой трижды статически неопределимой, так как для превра­
щения ее в статически определимую необходимо перерезать один из
ее элементов и тем самым устранить три лишние внутренние связи.
Реакциями этих связей являются: продольная сила N, поперечная
сила Q и изгибающий момент M (рис. 6.1, г). Эти реакции с помощью
уравнений статики найдены быть не могут.
1 Связью в строительной механике называется всякое препятствие, не допускающёе изменения взаимного положения точек или сечений системы. Термин
«лишняя связь» следует понимать как «избыточная связь», а не как «-ненужная
связь».
2 Если за лишнее неизвестное принять усилие в одном из вертикальных опор­
ных стержней.
3 Рамой называется стержневая система, элементы (стержни) которой во всех
или в некоторых узлах жестко связаны между собой и которая теряет геометриче­
скую неизменяемость, если все жесткие узлы заменены шарнирными.
194
Для превращения системы, представленной на рис. 6.2, в стати­
чески определимую достаточно удалить один из горизонтальных
опорных стержней и разрезать затяжку. Две удаленные связи этой
системы соответствуют двум степеням ее статической неопредели­
мости.
Вернемся еще раз к раме, изображенной на рис. 6.1, в. Для пре­
вращения ее в статически определимую мы сделаем разрез горизон­
тального ригеля и, таким образом, освободим систему от трех лиш­
них связей, заменив их силами N, Q и M (рис. 6.1, г). В таких же
условиях в смысле статической неопределигмости находится любая
система, представляющая замкнутый контур, который, таким обра­
зом, всегда трижды статически неопределим.
Замннутый
контур
Ш Ш /Ш 7 Ш
Рис. 6.3
Рис. 6.4
Контур, состоящий из ряда элементов (прямых или криволиней­
ных), жестко (без шарниров) связанных между собой и образующих
замкнутую цепь, будем называть замкнутым контуром.
Примерами сооружений с одним замкнутым контуром являются
системы, изображенные на рис. 6.1 и 6.3. Бесшарнирная рама
(рис. 6.4) представляет собой также замкнутый контур, ограничен­
ный снизу «землей», которую можно условно заменить бесконечно
жестким стержнем.
Так как очень часто в состав статически неопределимых систем
(особенно рам) входят замкнутые контуры, каждый из которых, как
уже теперь известно, трижды неопределим, то легко в этих случаях
установить и общую степень статической неопределимости всей кон­
струкции в целом. Например, конструкция, изображенная на
рис. 6.5, имеет два замкнутых контура и три лишних опорных
стержня; следовательно, она 2 -3 + 3 = 9 раз статически неопреде­
лима.
В рамной конструкции, представленной на рис. 6.6, а, верхний
контур снабжен шарниром; в разрезе, проведенном по этому шар­
ниру, действуют только два внутренних усилия: N и Q (рис. 6.6, б).
Такой контур дважды статически неопределим. Если рассматривать
всю систему (рис. 6.6, а) в целом, то она будет пять раз статически
неопределима, так как нижний контур этой рамы замкнутый и,
следовательно, неопределим трижды. Система, освобожденная от
внутренних лишних связей, в данном случае будет состоять из двух
195
защемленных внизу стержней с горизонтальными консолями
(рис. 6.6, б).
На рис. 6.7, а изображена так называемая шпренгельная балка,
т. e. балка, усиленная дополнительной конструкцией, элементы
которой благодаря наличию шарниров работают исключительно на
растяжение или'сжатие. Очевидно, достаточно перерезать нижний
элемент, чтобы превратить конструкцию в статически определимую,
Рис. 6.6
Рис. 6.7
так как тогда она будет состоять из обычной балки с двумя при­
соединенными статически определимыми шарнирными треугольниками. В разрезанном же нижнем элементе (рис. 6.7, б) действует
лишь продольное усилие; следовательно, в данном случае система
неопределима один раз.
Необходимо заметить, что исключение лишних связей для пре­
вращения одной и той же статически неопределимой конструкции
в статически определимую может быть
произведено различными способами, одна­
ко число отбрасываемых связей всегда бу­
дет одно и то же. Так, например, раму,
изображенную на рис. 6.6, а, можно вклю­
чением в нее пяти шарниров превратить в
систему статически определимую, состоя­
щую из двух трехшарнирных арок (рис.
6.8). При этом общее число неизвестных,
подлежащих определению, уменьшится так­
же
на пять, так как в шарнире изгибаю­
Рис. 6.8
щий момент равен нулю и включение каж­
дого шарнира в систему сопровождается уничтожением момента в
этом сечении. Следовательно, рассмотренная рама статически не­
определима пять раз.
Включение шарнира в узел рамы, в котором сходятся два стерж­
ня, или же постановка его в любое место на оси стержня нарушает
(снимает) одну связь и снижает общую степень статической неопре­
делимости системы на единицу. Такой шарнир будем называть оди­
ночным или простым.
На примере рамы, изображенной на рис. 6.6, а, выясним еще
одно обстоятельство. В системах, содержащих лишние опорные
связи, степень внешней и внутренней статической неопределимости
19G
зависит от способа удаления связей системы. Например, при первом
варианте удаления связей по рис. 6.6, б конструкция может рас­
сматриваться как пять раз внутренне статически неопределимая.
При втором же варианте (рис. 6.8) она три раза внутренне и два раза
внешне неопределима. Очевидно, деление неопределимости на две
категории — внешнюю и внутреннюю — имеет смысл только при
определенном способе удаления связей. Такое деление, не увязанное
со способом удаления связей, лишено смысла.
Рис. 6.9
При удалении связей системы необходимо следить за тем, чтобы
получаемая конструкция была геометрически неизменяема. С этой
точки зрения в раме, представленной на рис. 6.9, а, имеющей одно
лишнее опорное закрепление, было бы ошибочным удаление верти­
кального стержня (рис. 6.9, 6), так как оставшиеся при этом три
опорных стержня пересекались бы в одной точке и, следовательно,
не могли бы препятствовать повороту рамы вокруг этой точки.
Определить усилия в этих стержнях из уравнений статики было бы
невозможно, так как для сил, пересекающихся в одной точке, ста­
тика дает всего два уравнения. С точки зрения геометрической не­
изменяемости полученная система является мгновенно изменяемой.
Правильный вариант удаления лишнего стержня указан на
рис. 6.9, в.
Для конструкций со сложным внутренним образованием можно
указать на следующий общий прием определения степени статиче­
ской неопределимости. В его основу кладется то соображение, что
каждый шарнир, включенный в узел, соединяющий k стержней,
снижает степень статической неопределимости на k— 1, так как та­
кой шарнир заменяет k— 1 одиночных шарниров (рис. 6.10). Поэтому
для определения степени статической неопределимости конструкции
необходимо взять утроенное количество замкнутых контуров (пред­
полагая, что все шарнирные узлы, в том числе и опорные, заменены
жесткими) и затем уменьшить его на число включенных в конструк­
цию одиночных шарниров, учитывая при этом, что один общий шар­
нир эквивалентен k— 1 одиночным шарнирам. Представив это пра­
вило в виде формулы, получим
S = 3 fl-H L
(6.1)
Здесь S — степень статической неопределимости системы; n —
число замкнутых контуров в конструкции в предположении отсут­
ствия шарнирных соединений; Ш — число шарниров, причем шар­
197
нир, соединяющий два стержня, считается за один (одиночный шар­
нир), соединяющий три стержня — за два шарнира (двойной шар­
нир) и т. д.; «земля» при этом рассматривается как стержень, а груп­
па стержней, не разделенных шарнирами, считается за один стер­
жень.
Например, для конструкции, изображенной на рис. 6.11, прону­
меровано восемь контуров и около каждого шарнира указано соот­
ветствующее ему число одиночных шарниров. Вертикальный и го­
ризонтальный стержни конструкции в каждом из ее нижних углов
рассматриваются оба вместе, как один стержень, так как они жестко
связаны друг с другом (не разделены шарниром). Следовательно,
л = 8 ; Ш - З + З + З + 4 + 1 + 2 + 1 + 1+ 1+ 1-20;
S = 3 -8 -2 0 = 4 ,
т. e. конструкция четыре раза статически неопределима.
В заключение дадим геометрическое толкование понятия стати­
ческой неопределимости системы. Если в статически определимой
системе (например, в ферме или трехшарнирной арке) устранить
,x
Рис. 6.10
Рис. 6.11
какую-либо внешнюю или внутреннюю связь, то она превратится
в геометрически изменяемую систему. Следовательно, статически
определимая конструкция содержит в своем составе такое количество
связей, которое является минимально необходимым для обеспечения
ее геометрической неизменяемости. Связи избыточные (сверх этого
количества) порождают статическую неопределимость конструкции.
Таким образом, из любой статически неопределимой конструкции
можно устранить, по крайней мере, одну связь без нарушения ее
изменяемости. Выше видно, что варианты удаления связей могут
быть весьма различными.
Однако не каждая связь неопределимой конструкции может быть
принята за лишнюю, так как удаление некоторых связей может сде­
лать конструкцию изменяемой. В этом смысле все связи проф.
И. М. Рабинович делит на две категории: абсолютно необходимые и
условно необходимые.
К первой категории принадлежат те связи, удаление которых из
статически неопределимой конструкции делает ее геометрически
198
изменяемой (рис. 6.9, б). Например, на рис. 6.9, а такими связями
являются вертикальные опорные стержни. Удаление любого из них
делает систему мгновенно изменяемой.
Ко второй категории относятся те связи, удаление которых не
делает систему геометрически изменяемой, например горизонталь­
ные опорные стержни системы, изображенной на рис. 6.9, в.
Интересно отметить, что усилия, возникающие в абсолютно не­
обходимых связях статически неопределимой конструкции, нахо­
дятся из условий статики. Наоборот, усилия вусловнонеобходимых
связях требуют для своего разыскания изучения деформаций кон­
струкции.
§ 6,2. КАНОНИЧЕСКИЕ УРАВНЕНИЯ МЕТОДА СИЛ
Как было указано в предыдущем параграфе, определение усилий
в статически неопределимой системе связано с необходимостью со­
ставления дополнительных уравнений — уравнений деформаций
(перемещений) системы. Для этого прежде всего следует превратить
заданную n раз статически неопределимую систему в статически
определимую, устранив из нее лишние связи. Полученная таким
путем статически определимая система называется основной х.
Устранение каких-либо связей не изменяет внутренних усилий,
возникающих в системе, и ее деформаций, если к ней прикладыва­
ются дополнительные силы и моменты, представляющие собой реак­
ции отброшенных связей. Поэтому, если к основной системе кроме
заданной нагрузки приложить реакции устраненных связей, то
основная и заданная системы станут эквивалентными.
В заданной системе в направлениях имеющихся жестких связей
(в том числе и тех связей, которые отброшены при переходе к основ­
ной системе) перемещений быть не может. Поэтому в основной сис­
теме перемещения по направлениям отброшенных связей должны
быть равны нулю. Следовательно, реакции отброшенных связей
должны иметь такие значения, при которых перемещения по их
направлениям равнялись бы нулю.
Условие равенства нулю перемещения по направлению любой из
n отброшенных связей на основании закона независимости действия
сил может быть представлено в следующем виде:
^ i = Afi + А/2 + • • • + А/, n_i + Afo + A,-^p = 0.
(6-2)
Здесь первые индексы означают направление перемещения (и одно­
временно номер отброшенной связи), а вторые— указывают на
причины, вызвавшие перемещение. Таким образом, слагаемоеД^
следует читать: «перемещение по направлению связи i, вызванное
действием реакции связи fo>. Слагаемое А/р означает перемещение
по направлению связи i, вызванное действием заданной нагрузки.
1
Превращение заданной системы в статически определимую, как будет по­
казано в дальнейшем, не является обязательным. Основная система может быть и
статически неопределимой.
199
Обозначив реакцию связи k (в виде силы или момента) через X k
и выразив перемещения Д^черезединичныеперемещенияспомощью
равенства &ik = X kbik, представим условие (6.2) так:
A ,= ^
+ X A .+ . . . + ^ - A , , - i + ^
+ A^==0. (6.3)
Таким образом, условие эквивалентности основной и заданной
систем математически сводится к удовлетворению системы n линей­
ных уравнений:
Побочные диагонали
Главная диагональч.
* 4f \ X3$z ^X5$fe+XnjPCn-1 +^n/t,n^~Aip~ 0,
K\$i\ +—> \ ^ / ^
^ < '+ x n^+4p = 0,
^ l > ' ' ' ^ > < ' ^ ' ' ' ' ' ; y ' +' ^ = °Xj$ni,i+yx'' ^ s ' ^ < ' ^ , ^ ' i n - <
tf 0,
J j ^ + X , f ■■''+. . / ' ^ ' + ^ Л
+А„р = 0.J
(6.4)
Побочные диагонали
Уравнения (6.4) являются теми дополнительными уравнениями
деформаций (перемещений), которые позволяют раскрыть статиче­
скую неопределимость заданной системы. Первое из этих уравнений
выражает мысль о равенстве нулю перемещения в основной системе
по направлению первой отброшенной связи (по направлению силы
или момента Xi), второе — по направлению второй отброшенной
связи и т. д.
Уравнения (6.4) назьшаются каноническими уравнениями метода
сил. Такое название указывает, во-первых, на то, что уравнения
составляются по определенному правилу (канону), и, во-вторых, на
то, что неизвестными в уравнениях являются силы, представляющие
собой реакции отброшенных связей. Число уравнений равно числу
отброшенных связей, т. e. степени статической неопределимости
заданной системы.
Следует заметить, что вид канонических уравнений, т. e. коли­
чество слагаемых в каждом из них и общее число этих уравнений,
определяется.лишь степенью статической неопределимости системы
и не зависит от ее конкретных особенностей.
В системе канонических уравнений (6.4) в качестве коэффициен­
тов при неизвестных стоят перемещения основной системы, вызывае­
мые единичными силами или моментами, действующими по направ­
лениям отброшенных связей. Числовые значения этих коэффициен­
тов зависят от схемы, размеров и материала конструкции.
Коэффициент 6ik системы канонических уравнений представляет
перемещение по направлению i, вызванное силой, равной единице,
действующей по направлению k. Единичные перемещения biU рас­
положенные на главной диагонали системы канонических уравне­
ний, имеющие два одинаковых индекса, носят наименование глав­
ных в отличие от побочных перемещений bihy стоящих внеэтойдиагонали и имеющих разные индексы. Симметрично расположенные
200
относительно главной диагонали побочные перемещения в соответ­
ствии с теоремой о взаимности перемещений равны друг другу,
а именно:
Это обстоятельство уменьшает объем вычислений при определе­
нии коэффициентов канонических уравнений. Коэффициенты при
неизвестных в канонических уравнениях представляют собой еди­
ничные перемещения в основной системе по направлениям неиз­
вестных X от действия сил или моментов, равных единице, прило­
женных по направлениям этих неизвестных. Целесообразнее всего
определять эти коэффициенты по формуле перемещений способами,
изложенными в главе 5.
Для подсчета перемещений рекомендуется вычертить единичные
эпюры Mi изгибающих моментов в основной системе (т. e. эпюры от
действия X ;= 1), снабдив каждую из них номером соответствующего
неизвестного. Отдельно следует вычертить грузовую эпюру (эпюру
М р). Единичное перемещение 8ik вычисляется умножением единич­
ной эпюры Mi на единичную эпюру M h, а грузовое перемещение
A ip— умножением единичной эпюры М г на грузовую эпюру 2 М р.
Главные перемещения существенно положительны; побочные
перемещения и грузовые перемещения могут быть как положитель­
ными, так и отрицательными и, следовательно, равными нулю.
После вычисления всех единичных перемещений, являющихся
коэффициентами при неизвестных в системе канонических уравне­
ний, а также свободных (грузовых) членов этих уравнений, решают
уравнения, в результате чего определяют значения неизвестных.
Затем строят для основной системы эпюры изгибающих моментов от
каждого из найденных усилий, т. e. от Х и Х 2, . . . , X i9 . . . , Х п.
Для этого могут быть использованы построенные ранее единичные
эпюры, все ординаты которых необходимо теперь умножить на най­
денные значения соответствующих неизвестных.
Просуммировав по характерным точкам (на протяжении всей
рассчитываемой конструкции) ординаты эпюр от действия всех сил
X с ординатами грузовой эпюры, получим окончательную (сум­
марную) эпюру изгибающих моментов в заданной статически не­
определимой системе.
Окончательная эпюра изгибающих моментов может быть по­
строена и так. К основной системе прикладываются найденные не­
известные усилия и заданная нагрузка, а затем от их суммарного
воздействия строится обычными приемами окончательная эпюра
изгибающих моментов. Лишние неизвестные, таким образом, яв­
1 Единичное линейное перемещение от единичной силы выражается в см/кН
(м/кН и т. д.), а от единичного момента — см/(кН«см)=1 кН; единичное угловое
перемещение от единичной силы выражается в 1/кН, а от единичного момента —
1/(кН*см).
2 Влиянием поперечных и продольных сил пренебрегаем. При учете их влия­
ния необходимо перемножить также эпюры Q и N,
201
ляются как бы хранителями тайн статической неопределимости.
Когда они найдены — получен ключ для установления картины
распределения усилий во всей конструкции в целом.
Системе канонических уравнений можно дать энергетическое
толкование. Для любой основной системы всегда можно составить
rj
Г М 2 dx
выражение потенциальнои энергии: U = \ —^ j - , которое является
функцией лишних неизвестных Х 1У Х 2, Х 3, . . ., Х п. Взяв по ним
от энергии частные производные, получим перемещения точек
приложения неизвестных усилий Х 1У Х2, Х 3, . . . , Х п по направ­
лениям этих усилий:
dU _Д 1’
. J M__~~
- \^2». JЛУ* L ^ \ 3.> • • •.j ди
ду
1у ЛУ
дХ2
2’ дХ9 “
~~ * > ' " ' дХп
Д
^n*
д Хг ~
Но мы знаем, что основная система находится в условиях,
эквивалентных заданной, а потому указанные перемещения равны
нулю:
д
и
дХх ”~
n .
д
и
®*’ дХ2
ЛУ. “
n .
д
®»
w’
и
n .
.
д
и
ЛУ„ ”
— ^v ,* '• ‘* *
* ’’ дХп
ЛУ
дХ3
n
/
0*
\а )
\
Вторые производные потенциальной энергии
дЮ
dxl
дАг
дХг -
л .
б“ ;
d 2U
дА2
дХ\ ' дх\-
л ,
6 **; • • • ;
дЮ
дАп
oXl ~ дХа
б"»
имеют положительные знаки; следовательно, условия (а) указы­
вают на минимум потенциальной энергии. Таким образом, при
загружении статически неопределимой системы лишние (основные)
неизвестные 1 имеют такие значения, при которых потенциальная
энергия системы является минимальной. В этом состоит так назы­
ваемый принцип наименьшей работы.
При использовании этого принципа в практических расчетах
порядок действия следующий. Выбирают основную систему, при­
кладывают к ней нагрузку и неизвестные усилия и затем, выполнив
все вычисления, составляют общее выражение потенциальной энер­
гии системы. Далее составляют систему условий (а), которая после
алгебраических преобразований оказывается эквивалентной систе­
ме канонических уравнений.
§ 6.3. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
НА ДЕЙСТВИЕ ЗАДАННОЙ НАГРУЗКИ
Для выяснения последовательности расчета статически неопре­
делимых систем рассмотрим статически неопределимую балку, изо­
браженную на рис. 6.12, а. (В дальнейшем эпюры M будем строить
со стороны р а с т я н у т о г о волокна).
1 Усилия, возникающие в лишних связях.
202
В качестве основной системы примем балку с защемленным ле­
вым концом (рис. 6.12, б). Она получена из заданной системы путем
удаления одной связи, а именно правой шарнирно подвижной опоры.
Следовательно, заданная балка один раз статически неопределима.
К основной системе приклады­
*) Заданная система
ваем неизвестную пока реакцию Х х
правой опоры и заданную нагруз­
ку q (см. рис. 6.12, б).
Составим каноническое уравне­
ние, выражающее условие эквива­
лентности основной и заданной сис­
тем:
X A x+A ^=0.
(6.5)
Из этого уравнения следует, что
перемещение по направлению уда­
ленной опоры отсутствует.
Для определения X i необхо­
димо вычислить коэффициент 6^
и грузовой член Д1<?. Коэффици­
ент 6П представляет собой переме­
щение в основной системе по нап­
равлению Х и вызванное действием
силы Л^—1 (рис. 6.12, в)\ опре­
деляем его умножением единичной
__
эпюры Mi от силы X i= l на ту же эпюру Mi. Для подсчета Д1<?
(перемещения по направлению Х г от заданной нагрузки) необходи­
мо ту же единичную эпюру Mi перемножить с грузовой эпюрой
изгибающих моментов M q (рис. 6.12, г).
Таким образом,
13
2
3 EJ
3EJ
1
ql*
Подставив значения 6if и Д ^ в каноническое уравнение (6.5)
и решив его относительно Х ъ найдем
Д ля получения окончательной эпюры изгибающих моментов
в заданной статически неопределимой балке увеличиваем все орди­
наты единичной эпюры М х в X i раз (рис. 6.13) искладываемих
с ординатами грузовой эпюры M q (см. рис. 6.12, г).
Так, например, для середины пролета балки ордината оконча­
тельной эпюры M равна
M = M ^ + M ,= 1 ^ - ^ = ^ - .
203
В заделке ордината окончательной эпюры M равна
M = M A + M,= l ^ - f = _ ^ .
Окончательная эпюра изгибающих моментов показана на
рис. 6.14. Заметим, что для определения положения точки экстреql2
мума эпюры M и вычисления затем соответствующей ординаты це­
лесообразно построить сначала эпюру Q. Нулевое значение ордина­
ты эпюры Q соответствует, как известно, экстремуму эпюры М.
Эту же балку (см. рис. 6.12, а и
Задоииая система
а)
6.15, а) можно рассчитать, используя
'/л ____________ ^ 4
другую основную систему, например,
Б Ш
Ш
Ш
полученную из заданной путем от­
1
брасывания закрепления левого кон­
ца, препятствующего повороту лево$ Г(=/ Оснодная система
, го опорного поперечного сечения балf AjI *i 1* 1I
* * *+ *I l*i*i* * ъ
ки. Такая система показана на рис.
\v&7zfoz
mz
6.15, б. Единичная эпюра М х в основ­
ной системе от неизвестного момента
X i= l , приложенного к левому концу
балки (по направлению отброшенной
связи), показана на рис. 6.15, e, а
эпюра M изгибающих моментов в той
же системе от заданной нагрузки —
на рис. 6.15, г.
Умножив эпюру М А (рис. 6.15, в)
на ту же эпюру М 1У получим
1
б ц “ 1 'I' 2 *3E J
3^PI
EJ
Умножив эпюру М х (рис. 6.l5,<s)
на эпюру M q (рис. 6.15, г), найдем
Рис. 6.15
*4
qP 1
, 12
Я?
1
8 ' 1 ' 3 2EJ
qP
24E J '
Из канонического уравнения (6.5) получаем
^1 = - V f i u = - ^ 8Таким образом, на основную систему кроме заданной нагрузки
q действует момент X ^ —ql2/8, приложенный к левому концу балки
204
(рис. 6.15, д). Эпюра изгибающих моментов M в основной системе
от этих нагрузок (рис. 6.15, ё) представляет собой эпюру M и для
заданной системы. Эта эпюра совпадает с полученной ранее (см.
рис. 6.14) при расчете балки с помощью другой основной системы
(см. рис. 6.12, б).
На основании рассмотренного примера можно установить сле­
дующий порядок расчета статически неопределимых систем:
1) выбирается основная статически определимая система путем
отбрасывания в заданной системе лишних связей;
2) действие отброшенных связей возмещается приложением
к основной системе неизвестных усилий (сил или моментов);
3) составляются канонические уравнения (6.4), выражающие ту
мысль, что полные перемещения в основной системе, возникающие
по направлениям неизвестных усилий под влиянием этих усилий и
нагрузки, равны нулю;
4) основная система поочередно нагружается единичными уси­
лиями X i= l , X 2= 1, . . . , Х п= \ и от каждого из них отдельно
строятся единичные эпюры изгибающих моментов Af*. Помимо
этого строится грузовая эпюра изгибающих моментов М рг;
5) перемножением единичных эпюр вычисляются все коэффи­
циенты 8ik системы канонических уравнений;
6) перемножением единичных и грузовой эпюр определяются
грузовые члены Aip системы канонических уравнений;
7) решается система канонических уравнений, в результате чего
находятся значения неизвестных Х и Х и . . . , Х п\
8) для получения окончательной (суммарной) эпюры изгибаю­
щих моментов ординаты каждой из единичных эпюр умножаются на
найденное значение соответствующего неизвестного и все резуль­
таты суммируются (по отдельным точкам осей системы) с добавле­
нием к ним ординат грузовой эпюры моментов 2. Или же к основной
системе прикладываются найденные неизвестные усилия и заданная
нагрузка, а затем от их сум­
марного воздействия строится
эпюра изгибающих моментов.
Рассмотрим ряд примеров
расчета простейших статически
Основная
неопределимых систем.
система
Пример 1. Построить эпюру изги­
бающих моментовдлясистемы, изобра­
женной на рис. 6.16, а.
P e ш e н и с. Система два раза ста­
тически неопределима. В качестве oc1 Рассматривается случай расчета конструкций, для которых можно прене­
брегать влиянием продольных и поперечных сил. Если пренебрегать ими нельзя,
то аналогично строятся единичные эпюры Qi и Ni и грузовые эпюры Qp и Np.
2 Рекомендуется вычерчивать новые эпюры от действия каждого неизвест­
ного, а не пользоваться единичными эпюрами, изменяявнихцифры,чтобывает
источником ошибок.
205
новной системы принимаем ломаиый брус, заделанный правым концом (рис.
6.16,6).
Составим канонические уравнения (6.4):
^ 1^11 4 " ^ 2 ^ 1 2 “1“ ^1 q ~ 0»
Xi621+ X 2622+ A2<7= 0.
Единичные и грузовая эпюры изгибающих моментов для основной системы
показаны на рис. 6.17.
XV
Умножим эпюру Л1х на M i:
*
1 ( °2 2 , * ,
П = £У [~2~"за~^а*'а
Умножим эпюру Mx на М 2.
Ла —-ai —
EJ
2EJ'
Умножим эпюру М 2 на М 2:
22
EJ
2 ' 3 “ " 3 EJ'
Умножим поочередно эпюры М г и М 2 на эпюру M q:
'2 u
Ци п л ^
1 (qa2
a ^3 ^ . oa^
л* = т т - у T fl+ V “-fl
A
- _ J - . 2
Л2? ~
EJ
8Г7 ’
t . a . - - - W ^
2
2 “
4EJ'
Подставив полученные величины перемещений в канонические уравнения
и сократив на общий множитель а ъ E J , получим:
4 v
1V , 5
— X i ---- ry Л 2 "T^" qa — 0;
1 v , 1 v
— 2 ~ 1 ^~ ^j" 2
1
^л
4” ^^ —0 «
Решив эту систему уравнении, найдем:
уi = - y ^^ f l ;
X
V = ^^ </tf.
A2
Для построения окончательной эпюры изгибающих моментов прикладываем
к основной системе найденные неизвестные усилия, причем Х г направляем
206
справа иалево, так как в результате решения канонических уравнений зна­
чение X i получилось со знаком минус (рис. 6.18, а).
Составим теперь уравнения изгибающих моментов для каждого участка рамы.
Нижний конец вертикального элемента считаем левым и отмечаем его
крестиком.
Сечение / — /:
дл
3
M = y ^ ff* iпри Х\ = 0 M 1= 0 ;
а
Х1=т
яА
3
а
= У qa ~2
qa2
56
qa2;
* x -a
АлI
3
qa2
^ = y ^ - V
qa2
=-V -
Определим MmaxJ для этого первую производную от Л1 по x^ приравни­
ваем нулю:
dMi
3
^r q a — ^ 1 = 0,
откуда
и
Сечение I I — / / :
MU = ^ q a x z + y q a 2
при *2=0 M11 =
qa‘
qai
14
qa1
qa‘
28
Окончательная эпюра изгибающих моментов изображена на рис. 6.18, б.
Пример 2. Построить эпюру изгибающих моментов для рамы по рис. 6.19.
P e ш e и и e. Система трижды статически не­
определима. Сравниваем три основные системы,
приведенные на рис. 6.20. Каждая из них статически
определима и геометрически неизменяема. Необхо­
димо выяснить, применение какой системы связано
Заданная
с минимальным количеством подсчетов. С этой точки
система
зрения лучшими будут те, в которых использована
симметрия сооружения, так как тогда строить эпюры
^ ^ 1и перемножать их придется только для половины
'
сооружения. Поэтому из сравнения сразу же выпа­
a_
дают несимметричная система,приведенная на рис.
Рис. 6.19
6.20,a, и система, показанная на рис. 6.20, б, в ко­
торой несимметричны неизвестные Х г и Х2. Наилуч­
шей является система по рис. 6.20, в, для которой, крометого, проще выполнить
построение эпюр; ее и принимаем для дальнейшего расчета. Эпюры изгибающих
моментов для выбранной основной системы приведены на рис. 6.21.
X2 — ^
207
Составим канонические уравнения (6.4), выражающие условия отсутствия
взаимных перемещений сечений в разрезе, сделанном посередине ригеля рамы:
^ A 1+ ^ 2^12+ ^ 3^13+ Af^=0;
^1^21+^2^22+^3^23+А2/?=0;
^1^3l+^2^32+^3^33+ А3/?= 0*
Прежде всего замечаешь чтю все эпюры (рис. 6 .2 1 ) можно разделить на две
категории: симметричные 7Иг, 7И3 и обратно симметричныеМ2, М р. У последних
ординаты левых и правых частей по числовой величине равны, но расположены
с разных сторон рамы. Легко видеть, что все перемещения, при определении кото­
рых симметричные эпюры умножаются на обратно симметричные, равны нулю*
у
¥
*L
*4 хг
ty7/.
в)
*s
Хп
г
w%?.
vffip;
Варианты оснобных систем
Ш.
Рис. 6.20
В данном примере равны нулю следующие перемещения:
^l2> ^ 2 Ъ
^23>^32> A l p
И ^ 3 p*
Поэтому система канонических уравнений принимает вид:
^i^ii4-^3^i3-0; Xi63i + A3633 = 0; Х2б22+ А2р~®*
Х2=1
i
,a
X,=1
P
?
1
1
Рис. 6.21
Первые два уравнения дадут
Xi = 0 и Х 3 = 0 .
Остается решить третье уравнение; оно дает
Х2= -- &2р/$22‘
Вычислим перемещения А2р и 6 22:
2 Ph2 a
1
А2р — —
2 ’2 EJ~
Ph*a
2 EJ
* _ Г f<*Y 1 2 а , а , а | 2 _ а* ^ , fiM
22 LV 2 / ’ 2 ' з ' 2 + 2
2 ]£ У ~ 12£7^а + )'
208
Следовательно,
X 2— 6Ph2/[a (a + 6h)l
Остается эпюру М 2 умножить на Х 2 и результат сложить с грузовой эпюрой.
Окончательная эпюра изгибающих моментов изображена на рис. 6 .2 2 .
Пример 3. Определить распор двухшарнирного свода, изображенного на
рис. 6.23, д. Ось свода очерчена по параболе, уравнение которой
y= ^jrV -x)x;
свод пологий, так как y<-g->' жесткость EJ его поперечиых сечений постоянна.
Окончательная
(суммарная)
эпюра M
Ph(a+JhV
a+6h
Рис.
6.22
P e ш e н и e. Примем за лишнее иеизвестное распор свода, т. e. горизон­
тальную составляющую левой опорной реакции (рис. 6.23, б); составнм канониче­
ское уравнение
* A i+ A i,= 0-
(6.6)
Ввиду криволинейиости свода вычисление интеграла Мора с помощью способа
Верещагииа невозможно; в этом случае необходимо произвести обычное интегри­
рование.
При расчете пологого свода эта задача не является сложной, так как можно,
не делая существенной погрешности, принять ds=dx, созф = 1 и интегрирование
вести в пределах от *—0 до x = L Здесь ф — угол между касательной, проведен­
ной в произвольной точке оси свода, и осью абсцисс. Кроме того, в пологом своде
при определении перемещения, вызываемого горизонтальной силой, следует
учитывать и влияние продольной силы.
Поэтому перемещение бп находим по формуле
«и =
Aff ds
EJ
N\ds
EF
где
—
4/
Afi = - l * y = ---- — ( l - x) x\ N t — —l*cos ф — — cos ф.
Заменяя ds на dx и принимая cos ф равным единице, получаем
>ii
16f2 f a/#
EJP
S2J
,
1
ГЛ
8
1
f4
EJ ^ EF *
209
Перемещение Ai p вычислим по формуле
ds
M \M p
Aip —
EJ
где
Следовательно,
1 4/
о
1
i
i
^ _ т й т 1 (/ - *)2 *2 d*= “ ш т S Vv - 21x3 + *4) d*=
_
2 qf
■ ^ V
^ - 4 + т )-
qfP
\bEJ *
Решив каноническое уравнение (6 .8 ), найдем искомое усилие Х г:
qP
8 f 4 - 15
J
* f+ T '7
Пример 4. Рассчитать сквозную систему, изображенную на рис. 6.24, а.
Площади поперечных сечений всех элементов одинаковые. Стержни 5 и 6 обще­
го узла не имеют.
Р е ш е н и е . Система одии раз статически неопределима. Основную систему
получим, разрезав стержень 6 (рис. 6.24, 6),
Составим
каноническое
а) Заданная система
6} Оснодная система
уравнение
X A i + ^i p —0*
Перемещения 6 ц и Aip мо­
гут быть определены по фор­
муле перемещений для сквозных
систем:
^
hi „ V
Zu EF
NiNpl
EF
Здесь Ni — усилия в стержнях от нагрузки X i = l ; N p — усилия в стержнях
от внешней иагрузки P, приложенной к основной снстеме.
Для вычисления перемещений А1/? и бц составляем табл. 6.1, в которую
не включаем графу площадей поперечных сечений, так как они одинаковы для
всех стержней.
На основании табл. 6 . 1 перемещения A i ^ и 6 ^ равны:
^1Р= - ~ ~ ( 3 + 2 Г 2 );
6 ii= ^ (2 + 2 ^ 2 ).
Подставив их в каноническое уравнение и решив его, получим
Х1= Р
210
3_L2^2
2
f
2+4
T аблица
Номер
стержня
l
*i
NP
Ar V
N*l
1
а
-V V 2
P
— P a/V 2
а /2
2
а
-l/V^2
P
—Pa/V
а/ 2
3
а
— 1/^2
0
4
а
—1 / ^ 2
p
5
a V~2
1
- P f 2
— 2 Ра
aV2
6
aV2
1
0
0
a V2
Всего
-
-
—
2
д/ 2
0
-P a iV
- * L O
6.1
2
+ 2^2)
д/ 2
а ( 2 + 2 V2)
Усилие в любом элементе заданной статически неопределимой системы
можно теперь определить по формуле
* /= л ^ + в д .
Первое слагаемое этой формулы дает величину усилия в стержне основной
системы от действия на нее внешней нагрузки P, а второе слагаемое определяет
Заданная система
1^ a ^ j L a ^ 1^ а , I
fll
^ t ^’ '""" u d
А
T) 1 's
а)
N
s)
L1 !__ L < W
Рис. 6.25
величину усилия в нем от действия иа осповную систему лишнего неизвестного X ^
Эта формула составлена на основании принципа независимости действия сил,
Например, усилие в стержне 2 равно
N, = N 2 + Х 2Х г = P + ( - ^ L - ) P 3 ~L i X ^ = P 1 + 2 ^ 2 .
p
\
V 2 / 2 ^ 2+ 4
4 (l + Y 2)
Пример 5. Рассчитать комбинированную систему, показанную на рис. 6.25, а
(шпренгель).
Особенностью рассматриваемой конструкции является наличие в ней основ­
ной балки, перекрывающей пролет, работающей преимущественно на изгиб, и
дополнительной конструкции, которая усиливает эту балку и элементы которой
работают как элементы ферм, т. ё. сжаты или растянуты; площади поперечных се­
чений этих элементов одинаковы,
211
При подсчете перемещений в элементах
каждой из указаниых частей этой конструк­
ции необходимо применить формулу пере­
мещений соответствующего вида.
P e ш e и и e. Основную систему полу­
чим, разрезав стержень 1— 2 (рис. 6.25, б).
Составим каноиическое уравиеиие
*A i+A j*=0.,
Для подсчета 6 и и А1р строим эпюры изги­
бающих моментов Мр и Mi (рис. 6.26) для ос­
новной балки и, кроме того, вычисляем продольиые усилия в элементах дополиительиой
конструкции. При действии на затяжку 1—2
усилия А] = 1 в стойках появляются сжи­
мающие продольные усилия,равиыеединице,
которые передадутся на балку. Для элемен­
тов, входящих в состав дополнительной конструкции, составляем табл. 6 .2 .
T а б л и ц а 6.2
Номер
стержня
l
Nl
%
л '.л у
0—1
1—2
а У~2
2—3
1—4
2—5
а у~2
а
а
^2
1
^2
—1
—1
0
0
0
0
0
0
0
0
0
0
Всего
—
■—
—
0
а
Nil
2а У~~2
а
2a У~2
а
а
a(3 + 4 ^ 2 )
Вычисляем перемещения:
fi“
EJ
( 2
’
3
" ' ^ + " 2' ' )
' ' f f ' ' 1'1
'
4 *'
2) ~
ZEI
^ liF
^
+
4 ^
2);
БЯа3
3E J ‘
Подставив значения 6 ц и А±р в каноническое уравнение и решив его, получим
, , 3 £ / ( 3 + 4 V 2) '
+ 5 *
EFa*.
Определение изгибающих моментов и продольных сил в конструкции про­
изводится суммированием грузовых усилий с единичными, увеличенными в X i
раз.
На рис. 6.27 приведены статически неопределимые системы, для
которых читателю предлагается:
1) выяснить степень их статической неопределимости;
2) наметить варианты основных систем и выбрать из них наилуч­
шие;
212
r
Ш Щ r t
у Я
P ____________
т
3) составить соответствующие канонические уравнения;
4) построить единичные эпюры;
5) подсчитать по одному перемещению 6 для каждой системы,
§ 6.4. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
НА ДЕЙСТВИЕ ТЕМПЕРАТУРЫ
Канонические уравнения метода сил при расчете любой стати­
чески неопределимой системы на действие температуры имеют вид:
^ l^ ll + ^2^l2 + ^3^13 + * • • + ^ r A w + ^ l* = 0;
^i^>i + Х 2$22+ Х н62г + . .. + X w62n + A2i = 0;
(6.7)
X A i + а д . + *з«„з + • . . + х а8пп + Ani = 0 .
Здесь бХ1, б12, . . . , Swn— имеют те же значения, что и при расче­
те на действие внешней нагрузки; Alf, Д2<, . . . , Ant— представ­
ляют собой температурные перемещения в основной системе по
направлениям лишних неизвестных усилий Х 1У Х 2, . . . . Х п.
Определяются эти перемещения по формуле (5.30) или (5.31) ^
1 Предполагается, что поперечные сечения элементов симметричны относи­
тельно осей, проходящих через их центры тяжести перпендикулярно расчетной
плоскости.
При несимметричных сечениях вместо ^
-~ ^ 2
следует
принимать / 2 4~
^i —t*. у , где у — расстояиие от волокна, температура ксторого при иагревании
h
изменилась на /2> Д° цеитра тяжести сечения.
213
(см. § 5.7):
М тd x + ^ a
h
Na dx,
0
0
или
mt =
£
a ^
Q
j
5+ £
a ^
Q
*.
Смысл канонических уравнений в этом случае, как и обычно,
заключается в том, что суммарные перемещения по направлениям
отброшенных связей равны нулю.
EJ
0вй
1
X
h
o°c v h
+ 10°с м
‘Заданная
система
+ 10% а
О снодная
система
V/,
а
EJ
Рис. 6.28
Рис. 6.29
Пример. Определить лишнее неизвестное усилие, возникающее в один раз
статически неопределимой системе, изображенной на рис. 6.28, и построить
эпюру изгибающих моментов при условии, что наружная температура не меня­
ется, а внутреиняя повышается по сравнению с температурой начального состоя­
ния на 10°С.
овс
4a
10°С
Q*C
10°С
тт.
Рис. 6.31
P e ш e н и e. Осиовная система представлена на рис. 6.29. Каноническое
уравнение имеет вид
^i6ii + Ai* = 0.
(6.8)
По приведенной в настоящем параграфе второй формуле для Ат\ опреде­
ляем
10-0
aa
10 + 0
а*
a = — 15a — — 5aa.
Aii = a h \
1 2 1
2 ~~
™ h
Зиачеине
6 ii
иайдем, умножив эпюру Mi (рис. 6.30) на ту же эпюру M t :
Л
1 aa 2
,
1
4а2
11— E J 2 3 a ~^aaaE J ~ 3 E J '
Подставив значения Ах* и 6 ii в каноническое уравнение (6 .8 ) и решив его
относительно Х ь получим
„ ____ Ах;__5aa [(3g//z)+.l] 3E J __l5 a £ /[(3 o //z )+ l]
1
6U
4as
4а2
214
Эпюра изгибающих моментов для заданной системы от действия на нее
температуры может быть получеиа умиожеиием всех ординат эпюры М\ на Xx;она изображена на рис. 6.31.
§ 6.5. СОСТАВЛЕНИЕ KAH НИЧЕСКИХ УРАВНЕНИЙ
ПРИ РАСЧЕТЕ СИСТЕМ НА ПЕРЕМЕЩЕНИЯ ОПОР
«
Напряженное состояние статически неопределимой системы мо­
жет быть вызвано не только действием на нее внешней нагрузки или
температуры, но также и перемещениями ее опор.
Рассмотрим составление канонических уравнений для определе­
ния лишних неизвестных усилий, возникающих в заданной системе
от поступательного смещения и от поворота ее опор.
В качестве конкретного примера рассмотрим раму, изображен­
ную на рис. 6.32, а. Штриховой линией показано положение рамы
после того, как правая
опора сместилась по гори­
зонтали и вертикали соот­
ветственно на а и b и по­
вернулась на угол ф.
Разберем порядок сос­
тавления
канонических
уравнений для трех различ­
ных основных систем, изоб­
раженных на рис. 6.32,
б — г.
Шчнем с первой из них
(рис. 6.32, б). Особенностью
зтой системы является то,
что все приложенные к
ней лишние неизвестные
усилия действуют по направлениям заданных перемещений опоры:
сила Х г совпадает с направлением горизонтального смещения опо­
ры, сила Х 2 действует по направлению вертикального ее смещения
(но в обратную сторону), момент Х 3 совпадает с заданным поворотом
опорного сечения.
Лишние неизвестные усилия X u Х 2, Х 3 необходимо подобрать
так, чтобы вызванные ими в основной системе перемещения по на­
правлению каждого из этих усилий были равны соответствующим
перемещениям опоры.
Канонические уравнения, выражающие эту мысль, предста­
вятся в виде
^ i^ n ~ЪХ 2812 +- X 3б13= ct\
\
X A i + * A * + *зб 23=
b; 1
(6.9)
* A , + * A * + *8fiss = <p.
J
Знак минус в правой части второго уравнения объясняетсятем, что направление силы Х 2 противоположно направлению за­
данного смещения опоры по вертикали.
215
При составлении канонических уравнений для основной систе­
мы, изображенной на рис. 6.32, в> следует рассматривать задан­
ные перемещения опоры В как «нагрузку» и в канонические урав­
нения вводить «грузовые» перемещ 1 ия Дхд, Д2д и Д3д, вызван­
ные этой «нагрузкой». Нетрудно уб диться в том, что эти пере­
мещения равны (см., например, § 5.14):
Д1Д= а;
Д2д = — b + /<P;
Дзд^Ф -
В этом случае канонические уравнения будут иметь вид
^1^11+^2^12+^3^13 + а —0;
\
^1^21+^2^22 + ^3^23' Ь + /ф = 0*, >
^ 1^ 3 1 + ^
2^32
+ ^ 3^ 3 3 + Ф “ ^*
(6.10)
J
Канонические уравнения для основной системы, изображенной
на рис. 6.32, г, можно представить в таком виде
^ i^ n +
^2^i2 +
^1^21+^2^22 +
* 3S 13 + ^ 1 Д “
®>
^3®23+^2Д~Ф»
\
f
(6. 1 1)
^1^31+^2^32 + ^3^33 + ^ЭД — О, J
где Дм, Д 2 д и Д3д— перемещения в основной системе по направ­
лениям Х 1У Х 2 и Х 3 от линейных смещений правой опоры по
горизонтали и вертикали соответственно на а и b г.
_
4
J^
2h
.
>)
>)
\ ,
Xt
1
и
fl
2h
Рис. 6.33
Эти перемещения можно, как известно (см. § 6.14), определить
по формуле
* А д + 2 Я Д = 0 >где левая часть уравнения представляет собой работу сил «единич­
ного состояния» на перемещениях основной системы, вызванных
линейным смещением ее опоры.
Единичное состояние основной системы при определении ее
углового перемещения по направлению Х г (от смещения правой
опоры по горизонтали и вертикали соответственно на а и b) пред­
ставлено на рис. 6.33, а.
Работа сил этого единичного состояния на перемещениях основ­
ной системы, у которой правая опора перемещается по горизонтали и
1
Поворот правой опоры (т. e. опорных стержней) не вызывает перемещений
в основной системе по направлениям Х ъ Х 2 и Х3.
216
в ер ти кал и , представится вы раж ением
* iA ^ + ( l/2 h) a+( 1/0 b=0,
откуда
А1Д= —aI (2h)— btL
Составив выражение работы сил единичного состояния, изобра­
женного на рис. 6.33, б, на перемещениях, возникающих в основной
системе от линейного смещения ее правой опоры по горизонтали и
вертикали, получим уравнение
^ 2^ 2A H“ (l/ 2 A) # — ( 1 //) b = 0 ,
откуда
А2д = — a/(2h) + b/L
Перемещение АзД определим из уравнения (рис. 6.33, в)
^ 3A3A— (l/h)a = 0 ,
откуда
АзД = a/h.
После подстановки в канонические уравнения (6.11) значений
Ахд, А2Д и АзД получим
X i^ii + ^ 2^i2 + ^ зб 13 — [af(2h) + b/l] = 0 ; \
* A i + * A . + *з«2з - la/(2h) - b/l] = Ф; |
^ 1^ 3l + ^
2^32
+ ^ 3^S3 + ^ / ^ - 0 *
J
(6 . 1 2 )
Каждое слагаемое левой части этих уравнений представляет
собой перемещение в основной системе по направлению отброшен­
ных связей, вызываемое тем или иным лишним неизвестным усили­
ем или же смещением правой
а)
б)
опоры.
Первое
Действи­
Канонические уравнения,
единичное
тельное
полученные в настоящем па­
состояние
состояние
раграфе, составлены с по­
мощью принципа независи­
x,-1
Vw>.
мости действия сил. Пока­
жем, что те же уравнения
можно получить путем 'ис­
Рис. 6.34
пользования теоремы о взаим­
ности работ.
Представим основную систему в двух состояниях, изображенных
на рис. 6.34, а, б, и составим для них на основании этой теоремы
следующее равенство работ:
Х & г + Х г б п + Х ъ б п = 1 •а.
(6.13)
t
Здесь левая часть уравнения представляет собой работу сил дей­
ствительного состояния (рис. 6.34, а) на перемещениях первого еди­
ничного состояния (рис. 6.34,6), а правая — работу силы Х г=1
первого единичного состояния на перемещениях действительного
217
состояния, в котором по направлению силы X i = l перемещение
задано и равно а .
Аналогично могут быть составлены н следующие два уравнения
(рис. 6.35, а, б):
^l^l2+^2^22 + ^3^32"
1'^> 1
ffi14^
а д .+ а д .+ а д .-ь ? *
/
1 ’ ;
Левые части этих уравнений представляют собой работы сил
действительного состояния (см. рис. 6.34, а) на перемещениях от
единичных сил во втором и третьем единичных состояниях основной
системы (рис. 6.35, а9б). Пра­
4)
вые же части этих уравне­
Второе
ний представляют работы сил
Третье
единичное
единичное
второго и третьего единичных
состояние
состояние
состояний основной системы
на перемещениях действитель­
*>■> ного ее состояния.
Х2Ч
Сопоставив систему урав­
нений (6.9), полученную ранее
Рис. 6.35
для конструкции, изображеннои на рис. o.c5Z,o, с полученной теперь [(6.13) и (6.14)lcnoмощью теоремы о взаимности работ и учитывая при этом, что б12=
— 62i, б13^ б 31 и б23= б 32 , приходим к заключению, что эти две си­
стемы тождественны, но прин­
ципиально различны по смыс­
лу. В самом деле, уравнения,
составленные на основании
принципа независимости дей­
ствия сил, выражают мысль о
том, что сумма перемещений
по направлениям лишних не­
известных усилий равна нулю
или же некоторой заданной
величине; уравнения же, со­
ставленные с помощью теоре­
мы о взаимности работ,—
мысль о том, что работа сил
действительного состояния ос­
новной системы на перемеще­
ниях, вызванных в ней любым
из «единичных» усилий, равна
Рис. 6.36
работе этого «единичного» уси­
лия и возникающих от него в основной системе опорных реакций
на перемещениях действительного состояния основной системы.
В порядке упражнения рассмотрим применение теоремы о вза­
имности работ для расчета той же рамы, когда в качестве основной
системы принята трехшарнирная рама (рис. 6.36, а). Необходимые
для расчета единичные состояния приведены на рис. 6.36, б — г.
Канонические уравнения, составленные с помощью теоремы
I
218
о
о взаимности работ, имеют вид
^ l^ ll + ^ 2^2l"h^3^3l"^"t"^/(2^)>
^
^I^l2^^2^22"b^3^32^*P"b^/(^0 ^!1\ *
(6.15)
Х А з + ^2^23 Н“ З Д з ^ 1 CtlH.
^
Сопоставив уравнения (6.15), полученные с помощью теоремы
о взаимности работ, с уравнениями (6.12), составленными ранее на
основании принципа независимости действия сил, приходим к за­
ключению, что они тождественны.
При расчете статически неопределимых систем на перемещения
опор обычно канонические уравнения составляют с помощью теоре­
мы о взаимности работ, так как этот прием обладает большей на­
глядностью; его можно также использовать и при расчете рам на
заданную внешнюю нагрузку, но в этом случае он не имеет преиму­
ществ по сравнению со способом составления канонических урав­
нений на основании принципа независимости действия сил.
§ 6 .6 . ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ
В СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМАХ
1
При выводе формул перемещений рассматривались любые упру­
гие стержневые системы, материал которых удовлетворяет закону
Гука, а деформации которых малы по сравнению с их размерами.
Следовательно, эти формулы, а также способы вычисления пере­
мещений по ним, рассмотренные в гл. 5, применимы как для стати­
чески определимых, так и для статически неопределимых систем.
Определим, например, вертикальное перемещение точки С оси
рамы, изображенной "на рис. 6.37, а, при действии равномерно
распределенной нагрузки q. Эта рама была рассчитана в примере 1
§ 6.3 (см. рис. 6.16, а). Окончательная (суммарная) эпюра изгибаю­
щих моментов в раме показана на рис. 6.37, б (см. рис. 6.18, б).
Для определения вертикального перемещения Ас точки С ригеля
рамы приложим в этой точке иертикальную единичную силу. На
рис. 6.37, в показана эпюра изгибающих моментов M от действия
указанной единичной силы, полученная в результате расчета стати­
чески неопределимой рамы (расчет здесь не приводится). Перемно­
жив по способу Верещагина эпюры, изображенные на рис. 6.37, б, в,
найдем перемещение
л
Гqa% a
с ~
2
[ Т Г Т ‘ ¥
За
‘ 56
qa2
2
За
1
8- ’ Т а ' 5 6 * T +
1 ( 3a
qa2 0
a qa2 0 За qa2
a qa2 \ ,
+ T 'T ^ 5 6 'T T ^ - T 'T 6 '^ 5 6 * ^ ^ T * T r J +
а
i a
1
2 ’
1 /
6
[
a
qa 2
7 ’ 56 ‘
0
9а
qa 2
56 ' 28 '
0
a
qa 2
+ 7 ’ 28 ^~
9a qa- \ I 1 _
^~56
J £7
2
* ^T J
1
qa4
448£/ '
См.: Строительная механика / Под ред. А. В. Даркова. М., 1976, с. 292.
219
Знак минус указывает на то, что точка С перемещается в направ­
лении, противоположном направлению единичной силы, т. e. вверх.
Определение перемещений таким способом сложно, так как тре­
бует выполнения расчета статически неопределимой системы не
только на действие заданной нагрузки, но и на действие единичной
силы или единичного момента — при определении угла поворота.
Вычисление перемещений может быть значительно упрощено на
основе следующих соображений. Отбросим лишние связи заданной
системы, например две связи опоры Л, и превратим ее в статически
определимую — в данном случае в ломаный брус, заделанный в се­
чении В. Приложим в полученной системе рис. 6.37, г заданную
нагрузку и реакции отброшенных связей.
Эпюра изгибающих моментов M (а также эпюры Q и N) для
этой системы ничем не отличаются от показанной на рис. 6.37, б
эпюры M для заданной статически неопределимой системы (см#
рис. 6.37, а).
220
Деформации обеих систем одинаковы. Поэтому перемещение Дс
точки С можно вычислить не в заданной статически неопределимой
системе, а в полученной из нее (путем отбрасывания лишнихсвязей)
статически определимой системе. Для этого приложим к последней
единичную силу по направлению искомого перемещения и постро­
им единичную эпюру M (рис. 6.37, д). Умножив эту эпюру на эпюру
M (рис. 6.37, б), найдем перемещение Дс :
д
__ a a
I / qa2 I
qa2 2 \ I __
qa*
C~ T ' Y ' T \ ~ 5 6 ' Y ~ 2 8 '~ 3 J~ E J~ ~ № E J'
Для вычисления перемещения в статически неопределимой систе­
ме может быть выбрана любая статически определимая, полученная
из заданной отбрасыванием связей, а не только та, которая исполь­
зовалась при расчете последней в качестве основной системы. Мож­
но, например, для определения того же перемещения Дс использо­
вать статически определимую систему, показанную на рис. 6.37, e.
Приложив к ней по направлению искомого перемещения единичную
силу, построив от действия этой силы эпюру M и перемножив по­
следнюю на эпюру M в статически неопределимой системе от за­
данной нагрузки (см. рис. 6.37, б), получим
qa2
Дс — —14
a
2
• —
2
3
a
2
• ■■■ ■ • ------------
qa2
2
—■ • ----- C f
8
3
•
a* I
2
1 .
1i
2~
------
+ ^ . ^ . ± ( ^ ! . 1 + ? е 1 .1 ^ ] JL =
^ 2
2
2 ^ 14
3 ^ 56
qa4
3 j I EJ
В качестве статически определимой системы следует выбирать
такую, чтобы единичная эпюра M строилась наиболее просто, захва­
тывала наименьшее количество участков и по возможности имела бы
нулевые ординаты на тех участках, где эпюра M в статически не­
определимой системе имеет наиболее сложное очертание. По этим
соображениям из двух рассмотренных статически определимых сис­
тем более целесообразно принять показанную на рис. 6.37, д.
Иногда требуется определить перемещение в статически неопре­
делимой системе от заданной нагрузки, но нет необходимости опре­
делять усилия, возникающие в этой системе. В таких случаях можно
не производить расчета статически неопределимой системы на за­
данную нагрузку, а ограничиться расчетом ее на единичную силу
(или момент), действующую по направлению отыскиваемого пере­
мещения. Перемещение может определяться умножением получен­
ной в результате такого расчета единичной эпюры M (в статически
неопределимой системе) на эпюру M от нагрузки, построенную в
статически определимой системе, полученной из заданной отбрасы­
ванием лишних связей.
Для доказательства такого утверждения рассмотрим систему,
изображенную на рис. 6.38, а.
Вертикальное перемещение Д2£ точки С (рис. 6.38, а) будет най­
дено, если перемножить, по Верещагину, эпюры, показанные на
рис. 6.38, ау б. С другой стороны, если перемножить эпюры, изо221
браженные на рис. 6.38, в, г, то будет найдено увеличенное в P* раз
единичное перемещение 612 (рис. 6.38, в). Но так как 612= 6 2i, то,
очевидно, справедливо и такое равенство: 812Р1—821Рй где S21P i =
= Д 2i. Поэтому k*i=buPi. Таким образом,
действительно,
искомое перемещение может
a)
быть найдено умножением единичной эпю­
^Щщрр*
ры, построенной для заданной статически
неопределимой системы, на грузовую эпю­
ру, построенную для любой основной сис­
темы, полученной из заданной. Этот вывод
справедлив и в случае действия на систему
любой нагрузки.
Используем этот прием для определе­
ния перемещения Дс рассмотренного при­
мера (рис. 6.38, а). Для этого следует, на­
пример, перемножить эпюры, показанные
на рис. 6.37, ву ж:
3а
qa<
qa*
qa2 а /За
a o , 9 a \ 1 *j I _
Д . = ~2
448EJ
56
~Т * T \ 5 6 ~ Т *Ь6) ~2\ Т1~~
Итак, при подсчете перемещения одна из перемножаемых эпюр
(грузовая или единичная) обязательно должна быть построена для
заданной статически неопределимой системы; другая же эпюра мо­
жет быть построена и для статически определимой системы, полу­
ченной из заданной отбрасыванием лишних связей.
Подсчет перемещения в статически неопределимых сквозных
системах (фермах) производится аналогично рассмотренному, но
при этом вместо перемножения эпюр изгибающих моментов произво­
дится перемножение эпюр продольных сил.
§ 6.7. ПОСТРОЕНИЕ ЭПЮР ПОПЕРЕЧНЫХ И ПРОДОЛЬНЫХ СИЛ.
ПРОВЕРКА ЭПЮР
Изгибающий момент и поперечная сила в сечении x прямой
балки могут быть определены по формулам
n
1>
(6.16)
Здесь Mxn и Q°„—соответственно изгибающий момент и попереч­
ная сила в сечении x однопролетной балки с пролетом /п, вызван­
ные действием нагрузки, приложенной в этом пролете; М п^ г —
изгибающий момент при x = 0 (т.е. на левом конце балки); М п—
то же, при х = 1п (т.е. на правом конце балки).
Эти формулы не меняют своего вида также и в случае, когда
в балке действуют не только изгибающие моменты и поперечные
силы, но и продольные силы, так как последние не оказывают
влияния на эпюры M и Q.
222
В таких же условиях находится любой из элементов рамы, в ко­
тором действуют изгибающие моменты, поперечные и продольные
силы, а потому приведенные формулы применимы и для определения
изгибающих моментов и поперечных сил в сечениях прямолинейных
элементов рам.
Уже отмечалось, что если при построении эпюры M ординаты ее
отложены со стороны растянутых волокон элементов сооружения,
то поперечная сийа положительна, если для совмещения оси эле­
мента с касательной к эпюре изгибающих моментов приходится эту
ось вращать по часовой стрелке. Вращение оси должно произво­
диться всегда так, чтобы угол поворота не превосходил 90°. Числовое
значение поперечной силы равно тангенсу этого угла.
Для определения направления поперечной силы необходимо
провести разрез через данное сечение элемента и затем к каждой
части такого элемента в разрезе приложить поперечную силу; при
этом, если поперечная сила положительна, то она должна вращать
каждую такую часть элемента относительно другого его конца по
часовой стрелке.
Для построения эпюры N можно вырезать все узлы рамы, при­
ложить к ним действующую на них нагрузку, включая продольные
и найденные ранее поперечные силы, и затем составить для этих
узлов уравнения равновесия, из которых и определить искомые
продольные силы.
Можно использовать и другой прием, заключающийся в том, что
для основной системы строятся эпюры продольных сил от совместногодействия найденных лишних неизвестных и заданной нагрузки.
Такой же способ применим и при построении эпюр M и Q.
Пример. Построить эпюры Q и N для рамы, эпюра изгибающих моментов
для которой изображена на рис. 6.39. Предварительно условимся обозначать
внутреиние усилия, действующие по кон­
ЩкН/м
цам любого элемента ab рамы, следую­
ш
*
щим образом: М аъ* Qdb* ^ а Ь ~ соответ­
ственно изгибающий момент, поперечная
сила и продольная сила иа конце а эле­
мента ab\ Mbai Qba> Аг& а~изгибающий
момент, поперечная сила и продольная
сила иа конце b того же элемента.
Буквенные индексы могут замеияться
цифровыми.
P e ш e н и e. Построение эпюры Q
начнем с элемента 1—2. Эпюра изгибаю­
щих моментов для этого элемента ограни­
Рис. 6.39
чена прямой линией, так как нагрузка по
длине элемента не приложена. Следова­
тельно, поперечная сила на всем протя­
жении стойки 1—2 постоянна; она отрицательна, так как ось элемента для совме­
щения с касательной к эпюре моментов (в данном случае с линией, ограничиваю­
щей эпюру M для стойки 1—2) должна быть повернута против часовой стрелки.
Числовая величина поперечной силы равна тангенсу угла наклона линии, огра­
ничивающей эпюру изгибающих моментов к оси элемента, т. e. равна
10,8+ 5,4
To же значение поперечной силы Qi2 получим, если воспользуемся форму­
лой, приведенной в начале настоящего параграфа:
n 21=
— 0'l2T-п° I ^
Q l2 - 4
л -
21—
/12
^
12
Числовая величина поперечной силы Qjg ввиду отсутствия внешней нагруз­
ки на стойке 1— 2 равна нулю, а потому
Qii = ? h L z J ^ = = 3 t z i ± M = _ . 2,7 кН.
*12
U
При вычислении поперечной силы элемент нужно мысленно повернуть перед
собой так, чтобы он стал горизонтальным. После этого^изгнбающий момент, рас­
тягивающий верхние волокна элемента, надо считать отрицательным, а растяги­
вающий нижние волокна — положительным.
Аналогично определяется поперечная сила и в правой стойке. Она равна
+ 2 ,7 кН.
Переходим теперь к ригелю 2—3. Поперечная сила в ссчении, отстоящем на
расстоянии x от узла 2Уопределится из уравнения
n o
I М эг
4 x ( 2 3 ) = 4 x ( 2 3 )~ Г
М 2з
1
23
_ .
1
2 ,4 - 9
о
,
—10,8—
(— 1 0,8)
* ,ы -
= + 10,8—2,4*.
Поперечная сила в сечении с абсциссой * = 0 (т. e. у узла 2) равна Q23=
—+10,8 кН.
Поперечная сила в сечении с абсциссой x= 9 м (т. e. у узла 3) равна Qо2=
= + 10,8—2,4*9=—10,8 кН.
Эпюра поперечных сил изображена на рис. 6.40; в ней положительные ордиваты отложены иаружу контура, а отрицательные — внутрь.
Для построения эпюры продольных сил необходимо иметь эпюру поперечных
сил или же знать все лишние неизвестные.
Продольные силы определим из условия равновесия узлов.
Если вырежем узел 2 (рис. 6.41), то увидим,
что иа него действуют следующие силы: попереч­
ная сила Q23—+ 10,8 кН, возникающая в край­
нем левом сечении ригеля, направленная свер­
ху вниз; поперечная сила Q21= —2,7 кН в стой­
ке, направленная слева направо; продольная си­
ла Л^з в ригеле; продольная сила N21 в стойке
(при расчете рам часто принимают за положитель­
ные те продольные силы, которые вызывают сжа­
тие).
Из условий равновесия узла 2 получаем
N23= + 2 J кН; Л^21= + 10,8 кН.
Рис. 6.40
Вырезав узел 3 , убедимся в том, что в правой
стойке также возникает положительная продоль­
ная сила, равная 10,8 кН.
Построенная по полученным данным эпюра продольных сил изображена на
рис. 6.42.
Отметим здесь, что изгибающие моменты в каждом узле обязательно должны
уравновешиваться, а потому ординаты их в узлах для ригеля и для стойки (если
узлы образованы двумя пересекающимися элементами) равны друг другу. По­
перечные же силы в каждом узле, а также и продольные силы в отдельности не
уравновешиваются, но поперечные силы должны быть в равновесии совместно
с продольными.
Для проверки правильности построения эпюр M , Q и N могутбыть составлены
условия статического равновесия всей рамы или отдельных произвольно выделяе­
мых частей ее (статическая проверка). Например, сумма вертикальных опорных
реакций должна уравновесить вертикальную проекцию внешней нагрузки, сумма
224
моментов всех реакций должна уравновесить момент внешней нагрузки относитель­
но любой точки и т. д.
Проверка эпюры Q производится также сопоставлением ее с эпюрой М. Так,
например, в сечеиии, где касательная к эпюре M параллельна оси элемента, по­
перечная сила Q должна равняться нулю; в тех сечениях прямого стержня, где
касательная к эпюре M наклонеиа к его оси в одну и ту же сторону, поперечная
Рис. 6.41
Рис. 6.42
сила Q должна иметь одинаковые знаки; из двух сечений элемента то, в котором
касательная к эпюре M образует с осью элемента больший угол, имеет и большую
поперечную силу и т. д.
Статическая проверка эпюр M, Q и N не может еще гарантировать правиль­
ности решения задачи, так как ее условия будут удовлетворяться и при неправиль­
но найденных значениях лишних неизвестных.
Последнее является следствием того, что расчетная эпюра M (для статически
неопределимой системы) представляет собой эпюру моментов для основной стати­
чески определимой системы от действия на нее заданной внешней иагрузки и най­
денных лишних неизвестных; поэтому при любых значениях этих неизвестных
статическая проверка будет всегда удовлетворяться. Ошибки в найденных зна­
чениях неизвестных в большиистве случаев могут быть обнаружены с помощью
так называемой «деформационной проверки», заключающейся в том, что в основной
системе определяются перемещения, которые в заданной системе равны нулю или
известны.
Составляя канонические уравнения, будем исходить из условия, что переме­
щения по направлениям лишних неизвестных равны нулю или заданным числовым
величинам (например, при расчете на смещения опор). Построив в результате ре­
шения задачи окончательную эпюру изгибающих моментов, проверим, выполнены
ли эти условия, и тем самым проверим правильность построенной эпюры.
Проверим, например, правильность эпюры, построенной в примере 1 §6.3
(рис. 6.43, а, б).
Обратим систему в статически определимую и приложим по направлениям
3
3
отброшенных связей найденные силы ^=-qa, -cr^qa (рис. 6.43, в).
7
Zo
Очевидно, что в таком случае деформации всех элементов не будут отлнчаться отдеформаций элементовдействителыюй системы. Эпюра изгибающих моментов
от совместного действия иагрузки и найденных усилий в лишних связях будет
в точности такая же, как на рис. 6.43, б.
Если рама рассчитана верно, то перемещение по направлению каждого неиз­
вестного равно нулю. Вычислим для проверки перемещение А Верт нижнего конца
рамы по вертикали и посмотрим, равняется ли оно нулю. Для того чтобы найти
это перемещение, нужно известную эпюру изгибающих моментов в сооружении
помножить на эпюру от единичной силы, приложенной по направлению искомого
перемещения (рис. 6.43, г).
Перемножив эту эпюру с окончательной эпюрой M (рис. 6.43, б), получим
л
1
1
(W 2
1
Дверт — E J a ' a ' 2 ( 14 * 3
8
№ 2418
Я<* 2 \ _л
28 * 3 '
225
Проверим теперь, равно ли нулю горизонтальное перемещение Дгор нижнего
коица рамы. Для этого перемножим эпюру M от единичной горизонтальной
силы (рис. 6.43, д) с окончательной эпюрой M (рис. 6.43, б):
A
1
(qa*
1
2а
Arop~ £ 7 l H “ a ' T ' T
qa2
8
•
CL
qa2
1
2
.Л
— •а •—
•а —?а
~—
14
2
28
•
2
~Z
оT
•
а ,
тгО 4*
Г
1
\
qa^ ( 1
1
’ a ’ 2 # а )
£ V ( 42
24
.
1
28
1
,
_
56 ^
Ha основании рассмотренного частного примера можно вывести
общее правило, применимое к любой раме. Это правило изложим так:
в результате умножения окончательной
эпюры изгибающих моментов на любую из
единичных эпюр должен получаться нуль
или числовая величина заданного переме­
щения по направлению соответствующего
неизвестного (например, при смещении
опоры).
Если умножение на каждую единичную
эпюру дает нуль (или заданное перемеще­
ние ее), то это свидетельствует о правильОшчательная ности окончательной эпюры моментов (при
эпюраМ
условии, конечно, правильного построения
единичных эпюр). Окончательную эпюру
можно умножать не только на те единичные
^1
эпюры, которые были приняты в расчет, но
'*►
также на любую единичную эпюру, пост­
^
роенную для статически определимой сис­
♦
^
темы, полученной из заданной отбрасыва­
3
нием лишних связей.
J_ q.a r - T W
Это положение основано на том, что вся­
26
кую
статически неопределимую систему
■сссШПЛ^
*)
(после того как для нее построены эпюры
усилий) можно заменить любой (получен­
ной из нее отбрасыванием лишних связей)
статически определимой системой, прило­
жив к ней внешнюю нагрузку и реакции
отброшенных связей.
Так, для проверки правильности окон­
чательной эпюры изгибающих моментов
(рис. 6.43, б) можно было определить го­
ризонтальное смещение крайнего правого
сечения рамы, используя статически опре­
делимую систему, изображенную на рис.
6.44, и поворот этого же сечения, исполь­
Рис. 6.43
зуя систему, показанную на рис. 6.45.
Для деформационной проверки могут быть использованы еди­
ничные эпюры изгибающих моментов в основной системе, постро­
енные при расчете рамы. Проверка в этом случае сводится к пере­
множению каждой такой единичной эпюры с окончательной эпюs^
i
©
226
рой моментов. Результат такого перемножения должен равняться
нулю.
Особенно* простую деформационную проверку можно делать для
замкнутых контуров рамы (или для контуров с заделкой на опорах).
Рис. 6.44
Рис. 6.45
Положим, рассчитали раму с замкнутыми контурами или с контурами, у которых стойки заделаны в основании (рис. 6.46, о). Вы­
режем один из контуров этой рамы и приложим в местах разрезов
моменты, продольные и поперечные силы той же величины, что и
в заданной раме (рис. 6.46, б). Эпюра изгибающих моментов в пре­
делах этого контура останется без изменения.
Разрежем в каком-либо месте выделенный контур и опять при­
ложим в месте разреза моменты, поперечные и продольные силы,
действующие в этом сечении (рис. 6.46, б). Эпюра изгибающих мо­
ментов в контуре и теперь останется без изменения. Покажем, что
Рис. 6.46
в месте разреза нет рзаимного поворота сечений. Для этого следует
окончательную эпюру моментов помножить на единичную эпюру от
моментов yVf=l, приложенных в разрезе (рис. 6.46,e). Так как
у этой эпюры все ординаты равны единице, то перемножение эпюр
сводится просто к вычислению суммарной площади основной эпюры
изгибающих моментов по замкнутому контуру (с делением площадей
по отдельным элементам на жесткости поперечных сечений этих
элементов). Эта суммарная площадь должна равняться нулю.
Итак, суммарная площадь эпюры M (деленная на EJ) в любом
замкнутом контуре должна равняться нулю; площадь эпюры изги­
бающих моментов, расположенная внутри контура, берется с од­
ним знаком, а снаружи — с обратным.
Последний способ проверки наиболее прост. Если эта проверка
дает удовлетворительные результаты по всем замкнутым контурам
данной рамы (но не по контурам, имеющим шарниры), то имеются
8*
227
основания предполагать, что окончательная эпюра построена пра­
вильно.
Но быть уверенным в правильности построения эпюры можно
лишь тогда, когда будет сделано столько различных проверок \
сколько раз система статически неопределима, причем в числе этих
проверок не должно быть тождественных. Нельзя, например, под­
считав площади эпюры по двум смежным контурам, затем подсчи­
тать площадь эпюры по суммарному контуру, так как такая про­
верка будет тождественной с первыми.
§ 6 .8 . СПОСОБ УПРУГОГО ЦЕНТРА
Обычно при расчетах статически неопределимых сооружений
приходится совместно решать ряд уравнений перемещений (канони­
ческих уравнений). Это не только затрудняет вычисления, но и при
большом числе неизвестных может привести к значительным неточ­
ностям. Естественно поэтому стремле­
ние построить решение статически не­
определимой системы так, чтобы не­
известные разделились по уравнениям,
каждое из которых содержало бы по
одному неизвестному, или так, чтобы
система канонических уравнений со­
держала несколько групп уравнений,
в каждую из которых вошли бы опре­
деленные неизвестные, не вошедшие в
уравнения других групп.
Очевидно, что конструкция дваж­
ды статически неопределимая имеет
столь простую систему канонических
уравнений, что в упрощении этой сис­
темы нет необходимости (хотя прин­
ципиально оно возможно).
Переходя к трижды статически
Рис. 6.47
неопределимым конструкциям, раз­
берем способ упрощения расчета сплошного замкнутого *контура
произвольного очертания, изображенного на рис. 6.47, а. Отбросив
левые опорные связи, заменим их тремя неизвестными усилиями
Xi, Х 2 и Х 3 (рис. 6.47, б). Для определения этих усилий необходи­
мо решить совместную систему трех канонических уравнений. По­
этому ищем более рациональный способ расчета, позволяющий из­
бежать решения совместной системы уравнений. Для этого к лево­
му освобожденному концу сооружения прикрепляем бесконечно
жесткую консоль ab неопределенной пока длины и направления
(рис. 6.47, в).
На конце консоли в точке b прикладываем две взаимно перпенди­
кулярные силы Zi и Z 2, совпадающие с направлениями некоторых
1 Эти проверкн будут состоять частыо в подсчете площадей, частью в умно­
жении на единичные эпюры.
228
осей и и v, и сосредоточенный момент Z3. Если мы подберемчисловые
величины этих трех усилий так, чтобы крайнее сечение консоли
(в точке b) осталось неподвижным, т. e. не сместилось и не повер­
нулось, то тем самым, благодаря бесконечной жесткости консоли,
добьемся также неподвижности крайнего левого сечения заданной
конструкции (точкаа). Другими словами, если на нашу новую основ­
ную систему (рис. 6.47, в) воздействовать одновременно усилиями
Zu Z ^ Z3 и нагрузкой, то она будет находиться в условиях,эквивалентных заданной системе.
Теперь представим условия неподвижности конца консоли b
в форме канонических уравнений с неизвестными Zu Z 2, Z3
Zi$u + Z2S12 + Z3S13 + Ai p = 0;
^i^ 2i + Z2822 + Z 3S23 + Д2/? — 0; ►
Z 1631 + Z2632 + Z 3S33 + Д3/? = 0. ^
(6.17)
Коэффициентами 8ih этой системы являются перемещения конца
консоли, вызываемые единичными значениями усилий Zb Z2, Z3.
Эти перемещения существенно зависят от выбора размеров кон­
соли и направлений осей и и v. Воспользовавшись этим, выберем
положение точки b и направления осей так, чтобы все побочные пе­
ремещения, входящие в состав канонических уравнений, обратились
в нуль; тем самым будет осуществлено разделение неизвестных по
уравнениям.
Каноническая система уравнений в этом случае имеет вид
Zx -- - '^lp/$il',
Z2 --
^2p/^22> Z B--
Aap/^33'
(6.18)
Выразим в аналитической форме условия, определяющие выбор
новой системы неизвестных. Обозначив координаты элемента ds
заданной конструкции u> v (рис. 6.47, e), получим следующие ра­
венства:
6l2 = ^ M ±M 2 ds/(EJ) = ^ vu ds/(EJ) = 0;
o
0
613 = ^ M ±Ms ds/(EJ) = [ v • 1 ds/(EJ) = 0;
0
o
623 = ^ M 2M 3 ds/(EJ) = ^ и - 1 ds/(EJ) = 0.
o
0
Сократив на E f получим следующие условия:
о
о
о
Этим условиям легко дать геометрическое толкование. Если
разбить конструкцию на элементы ds и в центре тяжести каждого из
них приложить условный груз ds/J, то первые два из последней
группы интегралов выразят условия равенства нулю статических
229
моментов этих грузов относительно новых осей, проходящих через
точку b. Такое равенство возможно лишь тогда, когда точка b
совпадает с центром тяжести условных грузов. Третий интеграл вы­
ражает равенство нулю центробежного момента инерции тех же
условных грузов и, следователь­
но, свидетельствует о том, что
оси и и v должны являться
главными центральными осями
инерции.
Отсюда вытекает правило
отыскания новой системы коор_Ji____________ ___х динат: для обращения в нуль
x0
*'
всех побочных перемещений при
Рис. 6.48
расчете трижды статически неоп­
ределимого замкнутого контура
необходимо новое начало координат совместить с центром тяжести
условных грузов ds/J, а новые оси (и и v) повернуть до совпадения с
главными осями инерции тех же величин; если заданная конст­
рукция симметрична, то главными осями будут оси симметрии.
Положение начала координат определяется по обычным форму­
лам теоретической механики. Так* применительно к обозначениям
рис. 6,43. формулы для определения центра тяжести величины ds/J
представятся в следующем виде:
i
(6.19)
Уg=
J ds/J
Числитель каждой из этих формул представляет собой сумму
статических моментов элементарных условных грузов ds/J (рас­
пространенную на весь контур заданной системы) относительно
произвольно выбранных координатных осей. Знаменатели этих
формул представляют сумму условных грузов всей системы.
Угол наклона главных осей определяется по формуле, известной
из курса сопротивления материалов:
(6 .20 )
tg 2a — —2Jxc ucj(Jxc — Jyc) •
Здесь
Jxcyc = S xc Jl c ds/J;
J.vc = 5 Ус tis/У;
J„c = $ x \ ds/J. (6.21)
Условный груз ds/J носит также название элементарного, упру­
гого груза. Центр тяжести условных грузов называется упругим
центром тяжести или упругим центром.
Отметим, что применение изложенного метода расчета конструк­
ции путем переноса неизвестных в упругий центр не всегда целесооб­
разно. Например, при несимметричных контурах можетполучиться,
230
что объем дополнительных подсчетав, связанных с отысканием
новой системы координат, не оправдает получаемого при этом упро­
щения канонических уравнений. Пользоваться этим приемом впол­
не целесообразно при наличии одной или двух осей симметрии. При­
меры такого рода конструкций приведены на рис. 6.49,
к
У
V39n< ^ Щу >H>f ^ 4
L ^ -------^ Ч
mш
^ffim
0 л* *0
\
L
7 ________i ______*fc_Г 2
~
^
Рис. 6.49
Рис. 6.50
Пример. Для бесшарнирного свода (рнс. 6.50), очерченного по параболе
y=(4f/P)(l—x ) x с поперечными сечениямн, моменты инерции которых меняются
по закону J X= J S/cos фх, требуется найти положение упругого центра тяжести.
Здесь Jx— момент инерции поперечного сечения, соответствующего абсциссе x;
J s— момент инерции поперечного сечения в замке; ф*— угол наклона к горизонту
касательной к оси свода в точке с абсциссой x.
Координаты упругого центра определяем относительно системы координат
xOy (рис. 6.50). Ввиду геометрической и «упругой» симметрии (под «упругой» сим­
метрией понимается симметрия в размерах поперечных сечений арки) относитель­
но вертикальной оси, проходящей через замковое сечение бесшарнирного свода,
одна из координат упругого центра уже известна, а именно х0=1/2.
Определяем значение другой координаты по второй нз формул (6.19), учи­
тывая при эгом, что с^= си /со зф л: и J x ~ ^ s / Qosq)x :
l
5 (4/;/2) ( l - x ) x (dx/Js)
Уо =
6
= 4 '-
§ 6.9. ЛИНИИ ВЛИЯНИЯ ПРОСТЕЙШИХ СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫХ СИСТЕМ
Линии влияния усилий в статически неопределимых системах
можно построить двумя методами: статическим икинематическим.
Рассмотрим эти методы на примере
P=1
балки постоянного сечения, изображен­ О)
ной на рис. 6.51, а.
Обозначим x расстояние от левого
L
конца балки до подвижного груза P = 1.
P=1
Построим линию влияния опорной реак­
ции X u возникающей в правой опоре
балки. Основная система изображена на
рис. 6.51, б.
Основная система
Каноническое уравнение, выражаю­
Рис. 6.51
щее мысль о равенстве нулю перемеще-
\
1
1
231
ния в основной системе по направлению Х и имеет вид
^ i^ n + ^ip = 0,
откуда
*i = -6 x A i(6-2^)
Для отыскания перемещений 81р и бп строим эпюры М р и М х
от загружения консольной балки (основной системы) силами P = 1
\р~1
3ntvpa Ир
Эпюра Mf
128
Рис. 6.52
16 128
Рис. 6.53
и X = 1. Эти эпюры изображены на рис. 6.52, <я, б. Определяем
перемещения 81р и 8П:
1
Я/
x 2 (3/—x) в
6£7
/3
Подставив значения 81р и бп в формулу (6.22), получим
Х х = — 61/?/бп = x2 (3i — x) 3EJ/(6EJ /3) = x2 (3/—x)/(2/3).
Полученное выражение определяет опорную реакцию Xi (лиш­
него неизвестного) при любом положении груза P = 1 на балке.
График этого выражения и представляет собой линию влияния Xi.
В табл. 6.3 приведены значения ординат линии влияния Х и под­
считанные по полученной формуле для точек с интервалом между
T а б л и ц а 6.3
Расстояние
232
x
x*
0
0
// 4
1/2
31/4
1
/2/16
/2/4
9/2/16
/2
3l - x
31
ll//4
5//2
9//4
21
Ордииата линии
влияиия X t
0
11/128
5/16
81/128
1
ними в V4 пролета балки. По этим ординатам построена линия влия­
ния Xi (рис. 6.53).
Построим теперь для той же балки линию влияния попереч­
ной силы в сечении С с абсциссой x = l/2.
На основании принципа независимости действия сил попереч­
ная сила Qc может быть получена по формуле
Qc = Qfc + Q c*i.
(6-23)
где Qc— поперечная сила в сечении С от действия на консольную
балку груза P = 1; Qc— поперечная сила в том же сечении от
действия на балку опорной реакции Х г— 1;
p=f
величина Qc постоянна и равна — 1.
С
При положении груза P = 1 справа от
t
сечения С
1
Q c= 1;
при положении груза P = 1 слева от сече­
ния С
Линия Ьлияния Qc
Qc = 0.
Рис. 6.54
i'
График, представляющий собой линию влияния Q°c — попереч­
ной силы для сечения С консольной балки, изображен на рис. 6.54.
Величина второго слагаемого формулы (6.23) при любом поло­
жении груза P = l равна соответствующему значению опорной ре­
акции Х и умноженному на коэффициент, равный — 1. График изме­
нения этого слагаемого QCX х——Х ± (линия влияния Q cA ) изобра­
жен на рис. 6.55.
РЧ
± J ^lJ ^L J ^ L
i_
i_
4
4
4
4
4
^
4
%
Л иния влияния Qc
Л иния влияния QCX.
11
Рис. 6.55
Сложив ординаты линий влияния Q°c и QCX i, получим ординаты
линии влияния поперечной силы Qc для сечения С заданной стати­
чески неопределимой балки (рис. 6.56).
Аналогично может быть построена и линия влияния изгибаю­
щего момента для сечения С той же балки.
Изгибающий момент
м с = м ъ + м сх »
233
где M°c — изгибающий момент в сечении С от действия на кон­
сольную балку груза P = 1 ; М с — изгибающиймоментвсеченпиС
от действия на консольную балку опорной реакции Х 1= 1\ вели­
чина М с постоянна и равна //2.
Линии влияния M*c и M cX i изображены на рис. 6.57. Сложив
ординаты этих линий влияния, получим линию влияния изгибаю­
щего момента М с (рис. 6.58).
к
I
_L
4
1
4
1
4
p=f
i.
2
Л иния влияния МСХ1
I
i
С
i
Линия влияния Мс
Разобранный прием построения линий влияния называется
статическим.
Если величину 6 1/? в формуле (6 .2 2 ) на основании теоремы о
взаимности перемещений заменить величиной 8р1, то формула
примет вид
X i——8pi/6if.
(6.24)
Разница между 81р и 8р1 заключается в следующем: 81р— пере­
мещение (прогиб) одной точки, т. e. точки приложения усилия Х и
вызванное действием на балку груза P = 1 , который может быть при­
ложен в любой точке балки; 8р1— перемещение (прогиб) любой точки
балки (перемещение по направлению движущегося груза P = 1 ) от
загружения балки единичной силой, действующей по направлению
усилия Х х. Таким образом, график 8р1 представляет собой эпюру
прогибовбалкиотзагруж енияеесилой X x= \ . Если все ординаты
этой эпюры 6Р 1 разделим на постоянную величину (— 8 П), то полу­
чим график, ординаты которого будут характеризовать изменение
усилия X i при движении груза P = 1 по балке. Такой график и есть
линия влияния неизвестного усилия X t .
Следовательно, линия влияния неизвестного усилия Х г по виду
представляет собой эпюру прогибов, в данном случае статически
определимой основной системы, от загружения ее «единичной» си­
лой, действующей по направлению неизвестного усилия. Величина
(—6 ц) в этом случае является коэффициентом для перехода от эпюры
прогибов к линии влияния.
234
Такой метод построения линии влияния X i условимся называть
кинематическим.
Для сравнения кинематического метода со статическим рассмот­
рим вторично балку, изображенную на рис. 6.51, ау для которой
составим с помощью кинематическо­
го метода уравнение линии влияния
опорной реакции Х и используя при
этом равенство (6.24).
Эпюру 8р1 построим с помощью из­
вестного изсопротивления материалов
графо-аналитического метода, сущ­
Рис. 6.59
ность которого заключается в том, что
ординаты прогибов вычисляются как
уменьшенные в £/разординаты эпю ры моментов в фиктивной балке
от загружения ее фиктивной нагрузкой — эпюрой моментов, постро­
енной для действительной балки. Фиктивная балка, загруженная
фиктивной нагрузкой, представляющей собой эпюру моментов от
силы ^ i = l , изображена на рис. 6.59.
Составив выражение изгибающего момента в сечении x фиктив­
ной балки, получим
lx
т
EJ ’
откуда
Это полученное с помощью кинематического метода выражение
6pi полностью совпадает с выражением б1р, найденным выше стати­
ческим методом. Знак минус перед правой частью 8Pi означает, что
от силы X i= l балка, изображенная на рис. 6.51,6, прогибается
вверх (за положительное принято направление прогибов вниз, сов­
падающее с направлением груза P = 1 ).
__
Величина 8П определяется умножением эпюры Mt (см.
рис. 6.52, б) на эпюру же М и она равна 1
6 n = P /(3 5 /).
Уравнение линии влияния Х и следовательно, будет
X , = - 8 p ,/8 ^ = x ( 3 l- x ) / ( 2 l* ) .
Последняя формула совпадает с выражением для Х и получен­
ным выше с помощью статического метода.
Кинематический метод можно использовать и при построении
линий влияния внутренних усилий в сооружении, в частности изги­
бающих моментов и поперечных сил. Так, например, линию влия­
ния М Су изображенную на рис. 6.58, можно построить кинематиче­
В данном случае она может быть найдена из полученного выражения для
bpi подстановкой в него значения x= 1 и изменением знака на обратный (так как
направление действия силы X x= 1 обратно направлению силы Р— 1),
1
235
ским методом, если за лишнее неизвестное Х х принять не правую
опорную реакцию балки, а изгибающий момент М с • Основная сис­
тема в этом случае будет иметь вид, изображенный на рис. 6.60.
Каноническое уравнение, выражающее мысль о равенстве нулю
взаимного угла поворота смежных се­
,
X ,= M c
чений балки в месте включения шар­
нира, имеет вид
±
Щ
£
^iSii"b^ijy-0,
L
или
^ ifiii+ 6 p i= 0 ,
Рис. 6.60
откуда
* x = - fip x / 6 n .
Следовательно, в этом случае «моделью» линии влияния Х г явит­
ся эпюра прогибов основной системы от загружения ее моментами
X ^L
Кинематический метод позволяет установить вид линии влияния
изучаемого усилия Х и поскольку моделью ее является эпюра про­
гибов основной системы от загружения силой или моментом, равным
единице. Это свойство может быть использовано, с одной стороны,
как средство контроля линии влияния, построенной аналитически,
Ледая часть
Прадая часть
с другой — как прием, позволяющий без вычисления ординат ли­
нии Елияния устанавливать участки сооружения, которые необ­
ходимо загрузить при отыскании максимальных и минимальных
значений Х г.
При построении кинематическим методом линии влияния попе­
речной силы Qc связь левой части балки с правой можно предста­
вить состоящей из трех стержней (рис. 6.61). Усилие в вертикаль­
ном стержне такой связи и будет поперечной силой, возникающей
в данном сечении.
Единичное состояние основной системы, в которой в качестве
лишнего неизвестного принята поперечная сила X ^ Q c , изображено
на рис. 6.62.
Каноническое уравнение, отрицающее взаимное смещение кон­
цов стержня в сечении С по направлению Х г (т. e. по вертикали),
имеет вид
X A i+ fi^ = O ,
236
откуда
^ i ——
8 ip /8 n y
или
X1 = _ 6 р1/6п .
Следовательно, и в этом случае моделью линии влияния явится
эпюра прогибов основной системы от сил X i - 1 .
Касательные к двум ветвям упругой линии (рис. 6.62), прове­
денные в рассматриваемом сечении, должны быть параллельны
друг другу, так как оставленные горизонтальные стержни не позво­
ляют соседним поперечным сечениям,
расположенным по обе стороны точ­
ки С, поворачиваться относительно
друг друга.
Правая часть балки (рис. 6.62) на­
ходится под действием силы Х х=1
(рис. 6.63, а), вращающей ее по ча­
м
совой стрелке. Для ее равновесия не­
обходимо, чтобы момент, создаваемый
т усилиями в горизонтальных стержнях
X ,-f
(см. рис. 6.62), вращал ее против ча­
Рис. 6.63
совой стрелки, т. e. чтобы верхний
стержень был растянут, а нижний — сжат (рис. 6.63, а). Это вызы­
вает появление растянутой зоны с верхней стороны правой части
балки. В левой части балки (рис. 6.63, б) растянутая зона будет
также с верхней стороны.
Кинематический метод может быть использован и при построе­
нии линий влияния усилий в статически неопределимых фермах.
Задача 1 (предложена проф. Б. H. Кутуковым). Определить вертикальное
перемещение Ak точки К ломаной балки, изображенной на рис. 6.64.
У к а з а н и e. При решении учесть, что нижний конец элемента DF и верх­
няя поверхность балки AB имеют идеально гладкую поверхность, зазор FK равен
нулю и жесткость E J всех элементов одинакова.
Ответ: Д*=13Р/3/(640 EJ).
с
*в*
<NJ
Г
В
p
шт
l/2
i
5---------------
?i_________ с
—
W
~
Рис. 6.64
i
—
^
^
+
-<
а
------- i*-
а
а
-~£ -------- >■
Рис. 6.65
Задача 2. Определить, на какую минимальную величину следует укоротить
элемент DF системы, рассмотренной в предыдущей задаче (рис. 6.64), чтобы вер­
тикальное перемещение точки К оказалось равным PPI(96 EJ).
Ответ: На PPi(96 EJ).
Задача 3. Определить усилие в среднем стержне системы, изображенной на
рис. 6.65,
237
У к а з а н и e. При решении рассмотреть два предельных случая, когда
жесткость EJ балки CD равиа иулю и когда оиа равна бесконечности.
Ответ: В первом случае усилие в стержне равно —P (сжатие), во втором
+ l,5P (растяжение).
§ 6.10. ИСПОЛЬЗОВАНИЕ СИММЕТРИИ
При расчете статически неопределимой системы с большим чис­
лом неизвестных приходится совместно решать канонические урав­
нения со многими неизвестными.
Рассмотрим, например, раму, изображенную на рис. 6.66, со­
стоящую из двух замкнутых контуров, и, следовательно, шесть раз
статически неопределимую. При расчете этой рамы с помощью основ­
ной системы, показанной на рис. 6.67, необходимо составить и ре­
шить шесть уравнений с шестью неизвестными
X"x6ji + Х 2612 4- X zblz 4- X 4614 4 - Х 5б15 4- Х 681б 4- &1р — 0;
X ^ i + Х 2б22-f- Х3б23 4- Х 4624 4 - Х ъ825 4- Х 0б26 4- Д2/? = 0;
Xj6gj + Х 2б324 -Х 3б33 4- Х 4б34+ Х 5835 4- Хбб36 4- Д3/? = 0;
Х А г + * A s + З Д з + Х 4644 + Х 5645 + Х бб46 + Д4, = 0;
(5-25)
X i$ 5l + X 2S52 4- Х3б53 + X 4654 4- Х 5655 4~ Х бб56 4- Д5^ — 0; j
Х х66! 4- Х 2б62 4- Х 3б63 4- X 46tU4- Х 5б65 + X 6бб6 4- Аб/? = 0. J
Решение такой системы уравнений требует большой затраты вре­
мени. Однако то обстоятельство, что рассматриваемая рама являет­
ся системой симметричной, т. e. такой, у которой не только ее гео­
метрическая схема (образованная
Основная
Заданная
система i
осями стержней) имеет ось сим­
cucrnma
Ось
метрии, но и жесткости симмет­
*з^гЦ
рично расположенных элементов
\ J h равны друг другу, позволяет зна­
I
^:
h
чительно упростить ее расчет.
Упрощение основано на возмож­
w,
^шмшв
ности при расчете симметричных
1
I
систем всегда так выбрать основ­
J=
ную систему, чтобы эпюра М г от
каждого
неизвестного X t= \ была
Ш~
ш
^ __1
симметричной или обратносиммет­
ричной.
Рис. 6 .6 6
Если при расчете рассматри­
ваемой рамы (см. рис. 6.66) в ка­
честве основной системы принять, например, изображенную на
рис. 6.68, а, то эпюры А42, M ^ М ъ и M Qот симметричных единичных
усилий Х 2у Хз, X 5 и Х 6 будут симметричными (рис. 6.68, в> г, e ж),
a эпюры М х и Л44 от обратносимметричных единичных усшшйХ^и
Х 4 (рис. 6.68, б, д) — обратносимметричными (кососимметричными).
Произведение симметричной эпюры на обратносимметричную
равно нулю. Так, например, умножив эпюру М г (рис. 6.68, 6) на
эпюру М 2 (рис. 6.68, в)у для левой половины рамы получим
£
238
2h(2hf2)(l/2)=h4, а для правой половины —2h(2hl2)(lf2)=~hH\
следовательно, перемещение 6i2 равно [\/(EJ)](h2l—h 4 ) = 0.
Аналогично для рассматриваемой рамы равны нулю все побоч­
ные перемещения, определяемые умножением симметричной зпюры
на обратносимметричную, а именно: б12, б13, б15, б16, 62i, б24, б3ь
^34> б42» 6 4 3 > 6 4 5 > 6 4 6 > 6 5 1 ,
Оснобнаясистет
654,
б 61 И
6
64.
/
Рис.
6 .6 8
В результате этого система каноническихуравнений примет вид:
X i8 u + X A * + A i,= 0 ;
^ 2652 + ^ 3653 + ^ 5655+ ^ 656+ ^ 5^—0;
^2бб2 + ^з6бЗ+^5бб5 + ^б6б6 + Аб^ —0,
(6.26)
и
(6.27)
239
•
Первая из этих систем содержит два обратносимметричных не­
известных и два уравнения, а вторая — четыре симметричных не­
известных и четыре уравнения. Использование симметрии при вы­
боре основной системы позволило решение системы шести уравнений
с шестью неизвестными заменить решением двух независимых сис­
тем, одна из которых содержит два уравнения с двумя неизвест­
ными, а другая — четыре уравнения с четырьмя неизвестными. Это
значительно сокращает объем вычислений и поэтому позволяет
более точно определить значения неизвестных. Объем вычислений
Рис. 6.69
уменьшается не только в результате упрощения системы канониче­
ских уравнений и уменьшения количества подсчитываемых переме­
щений б, но и потому, что эти перемещения могут теперь опреде­
ляться перемножением соответствующих эпюр только для элемен­
тов одной половины сооружения (с удвоением полученного резуль­
тата).
Если симметричная рама имеет среднюю стойку, то подсчет пере­
мещений б от обратносимметричных неизвестных производится
сначала перемножением соответствующих эпюр для элементов одной
половины рамы (без средней стойки); затем полученный результат
удваивается и к нему прибавляется результат перемножения эпюр
для средней стойки рамы.
Рассмотрим теперь симметричную раму, изображенную на
рис. 6.69, а. Эта рама три раза статически неопределима. На
240
рис. 6.69, б показан один из возможных вариантов основной систе­
мы для расчета рамы. Эта основная система несимметрична, так
как закрепления нижних концов крайних стоек различны. Несим­
метричны и неизвестные Х и Х 2 и Х 3. Однако эпюры изгибающих
моментов в основной системе от действия неизвестных X i = l и
Х 2— 1 (рис. 6.69, e, г) симметричны, а эпюра от действия неизвест­
ного Х 3— 1 (рис. 6.69, д) обратносимметрична. Поэтому канониче­
ские уравнения (при данной основной системе) распадаются на две
независимые системы уравнений:
^ i 6 n + X 26 i 2 + A i^ = 0 ;
^ 1 6 2 1 + ^ 2622 + ^ 2^— 0
и
^ з 6 3з+А зя —0
как это имеет место при симметричных и обратносимметричных не­
известных.
§ 6.11. ГРУППИРОВКА НЕИЗВЕСТНЫХ
При расчете сооружений, имеющих несколько пролетов, невоз­
можно поместить все неизвестные на оси симметрии; поэтому для
получения симметричных и обратносимметричных эпюр приходится
принимать за неизвестные не отдельные силы, а группы сил. Для
6)
У
ZA Оснобная система \ Z/h
Оснобная система
Заданная система
Рис. 6.70
выяснения сущности этого приема рассмотрим шесть раз статически
неопределимую раму, изображенную на рис. 6.70, а. Если для ее
расчета принять основную систему (рис. 6.70, б) с несимметричными
лишними неизвестными X u X 2, X 3f Х4, Х ь и Х 6, то придется сов­
местно решить шесть уравнений
^ i 6 n + ^ 2 6 1 2 + ^"3613 + ^ 4 6 1 4 + ^ 5 6 1 5 + X , 6 1б + А гр = 0;
^ 1^ 21 +
^ 2^22 +
^ з 6 23 +
^ 4 6 2 4
+
^ 5 6 2 5
+
^6^26 +
^ 2 p
=
^i
^ 16 3 1
+
^2632
+
^3633
+
^4634
+
^5635
+ ^ б 6 3б 4- Азр = 0;
^ " 1 6 4 1
+
^ 2 6 4 2
+
^ 3 6 4 3
+
^ 4 6 4 4
+
^ 5 6 4 5
+
^
б
6
4б
+
А±р
+
^ 5
^ i6 j> i +
^2652 +
^36 53 +
^4654 +
^56 55 +
^ 6 5 6
^ i 6 6i +
^2®в2 +
З Д з
^
6б4 +
^5655 +
^ б 6 бб +
+
=
0 ;
p=
0;
^ep =
0»
(6.28)
так как в этом случае ни одно из значений 6 не будет равно нулю.
Если же за неизвестные принять не силы Х и Х 2, Х 3, Х4, Х ь и Х е„
а группы сил Z u Z 2, Z3, Z4, Z 5 и Z 6 (рис. 6.70, e), из которых Zx
241
представляет собой две одновременно действующие равные и проти­
воположно направленные горизонтальные силы; Z 2— две равные
горизонтальные силы, направленные в одну сторону; Z3— две
равные вертикальные силы, направленные вверх; Z4— две равные
вертикальные силы, направленные в противоположные стороны;
Рис. 6.71
Z6— два равных противоположно направленных момента; Z6— два
равных момента, действующих в одном направлении, то многие
коэффициенты окажутся равными нулю, так как будут определять­
ся произведением симметричных эпюр на обратносимметричные.
Эпюры изгибающих моментов от указанных единичных группо­
вых сил изображены на рис. 6.71; из них эпюры М и М 3 и М ъ сим­
метричны, а эпюры М 2у М4 и УИб— обратносимметричны.
Сопоставив две основные системы, изображенные на рис. 6.70, б,
в, нетрудно убедиться в том, что между лишними неизвестными X и
Z существуют следующие зависимости г:
X 1= Z 1^r Z2\
X 4= Z ± Z2;
A'2= Z S+ Z 4;
X 5= Z 3 Z4;
X 3^—Z5+ Z 6;
X f.— Z5 Zg,
1
Заметим, чтодля построения окончательных эпюр усилий нет необходимости
вычислять значения Х.
242
которые могут быть представлены и в таком виде:
Z4= ( X 2—X 5)/2;
Z ,= (* i+ * 4 )/2
Z 2= (X ,—X 4)/2
Z s= ( X 3+ X e)/ 2;
Z e = ( X s - X s ) / 2.
Z,=(*.+**)/2
В результате произведенной группировки неизвестных система
канонических уравнений (6.28) распадется на две независимые
системы (6.29) и (6.30), в одну из которых войдут только симметрич­
ные, а в другую — обратносимметричные неизвестные:
первая система
z ! (ви ) + Z, (б13) + Z5 (б15) + (Д1р) = 0;
Z* (б31) + Z3 (б33) + Z5 (б35) + (Дзр) = 0; \
(6.29)
z , (бб1) + Z3 (б53) + Z5 (6И) + (Д5Р) - 0;
вторая система
Z2 (б22) + Z4 (6М) + Z6 (би ) + ( Х р) = 0;
Z2 (6„) + Z4 (644) + Z, (в4в) + (Д4,) = 0;
Z2 (^62) + Z4 (б64) 4- Z6 (бвв) + (&6р) = О*
(6.30)
Здесь (6/Л) и (Д*-,?) представляют собой групповые перемещения.
Таким образом, сложная система уравнений благодаря искус­
ственной группировке неизвестных распадается на две более прос­
тые. Объем вычислений уменьшается благодаря этому в несколько
раз.
В дальнейшем неизвестные усилия будем обозначать буквой X
независимо от того, являются ли они отдельными или групповыми.
Не будем ставить и скобок у групповых перемещений.
Групповые перемещения определяются, как и обычные (негруп­
повые) перемещения 8ik и A ipt т. e. путем перемножения соответ­
ствующих эпюр, построенных для основной системы. Определение
групповых перемещений не сложнее, чем обычных; оно также про­
изводится путем перемножения эпюр для половины рамы с удвое­
нием результата. При наличии в раме средней стойки перемножение
эпюр производится сначала для элементов одной половины рамы
(без средней стойки), затем полученный результат удваивается и
к нему прибавляется результат перемножения эпюр для средней
стойки рамы.
§ 6.12. СИММЕТРИЧНЫЕ И ОБРАТНОСИММЕТРИЧНЫЕ
НАГРУЗКИ
При действии только симметричной или только обратносиммет­
ричной нагрузки на симметричное сооружение задача еще более
упрощается, так как в этом случае можно выбрать такую основную
систему, что не только все единичные эпюры, но и грузовые будут
симметричны или обратносимметричны. Вследствие этого не только
многие из коэффициентов при неизвестных, но и некоторые из сво*
243
бодных членов системы канонических уравнений окажутся равны­
ми нулю.
Рассмотрим раму (рис. 6.72, а), находящуюся поддействием сим­
метричной нагрузки. В ней шесть лишних неизвестных. Сделав раз­
рез верхнего ригеля посредине и отбросив три опорных стержня,
получим основную систему (рис. 6.72, б) с симметричными и обрат­
носимметричными неизвестными. Лишние неизвестные, располо­
женные не на оси симметрии и представляющие собой в данном
”■^1
ite
о>—
@
1
®*
ЯЯ>
Рис. 6.72
случае горизонтальные составляющие крайних опорных реакций,
разложены на две группы сил — Х 4 и Х ъ.
Эпюры изгибающих моментов для основной системы от всех еди­
ничных неизвестных и от нагрузки представлены на рис. 6.72, в — w.
Поскольку все неизвестные усилия были выбраны так, что разде­
лились на две группы — симметричную (Хх, Х 2, Х 3 и Х 4) и обрат­
носимметричную (Х 5 и Х 6), то канонические уравнения распадутся
244
на две независимые системы уравнений
X x6n + X26l2 + Х3813 + Х 4614 + ^ ip ~ 0;
Х А .~ ь Х Л 2Н~ х 3б23 + х 4б24 I ^ 2 p ^ ’
Х А . + Х 2б32 + Xg6gg + }
A ., = 0;
Х А . ~Ь Х 2б42 +- Х3б43 + Х 4б44 A*, = 0;
(6.31)
Х 5б55 + Х Д е + Л5;? = 0;
х 5б65 + Х А б A ., = 0.
В этих системах грузовые перемещения А5р и Авр равны нулю,
так как они определяются перемножением обратносимметричных
эпюр М ъ и Л16 с симметричной эпюрой М р от нагрузки (рис. 6.72, и).
Следовательно, система уравнений (6.31), содержащая обратно­
симметричные неизвестные, может быть представлена в следующем
виде:
Х 5б55+ Х бб56= 0 ;
X 5S65+ X 6S66= 0 .
Отсутствие свободных членов указывает на равенство нулю об­
ратносимметричных неизвестных Х 5 и X 6j , в чем легко убедиться
подстановкой в эту систему значений Х 5= 0 и Xe=0.
Если бы на данное сооружение (рис. 6.72, а) действовала обрат­
носимметричная нагрузка, то, очевидно, были бы равны нулю все
симметричные неизвестные.
Обобщая полученный результат, можно сформулировать два
правила: .
1) при действии на симметричное сооружение симметричной
нагрузки в нем возникают одни лишь симметричные неизвестные
(обратносимметричные неизвестные равны нулю);
2) при действии на симметричное сооружение обратносимметрич­
ной нагрузки в нем возникают одни лишь обратносимметричные
неизвестные (симметричные неизвестные равны нулю).
§ 6.13. СПОСОБ ПРЕОБРАЗОВАНИЯ НАГРУЗКИ
Правила, сформулированные в предыдущем параграфе, могут
быть использованы при расчете симметричного сооружения на
несимметричную нагрузку, так
как любую нагрузку, приложен­
Ш пн
7
ную к симметричному сооруже­
Я
нию, можно разложить на сос­
тавляющие симметричного и об­
ратносимметричного вида.
Пусть на симметричное соору­
жение, изображенное на рис.
6.73, действуют равномерно рас­
Рис. 6.73
пределенная нагрузка интенсив­
ностью q и сосредоточенная сила P, приложенные несимметрично.
Разложим нагрузку q и силу P на составляющие симметричного
фис. 6.74, а) и обратносимметричного (рис. 6.74, б) вида. Сумма этих
д,
245
нагрузок в каждой точке оси ригеля равна заданной нагрузке.
В самом деле, в результате сложения [нагрузок, изображенных на
рис. 6.74, а, б, левый ригель окажется загруженным лишь равно­
мерно распределенной нагрузкой q, а правый — сосредоточенной
силой Р.
f)
$
P
p
г
г
’£2 £I ' Н Ш Ш Ш Ш 1
м м ^^^H^ 1 ш ш ш п п ;
.J L_ §
£
г
Ш
tf7?,
477?,
Ш
Рис. 6.74
В основной системе (рис. 6.75, а) с симметричной нагрузкой,
изображенной на рис. 6.74, а, будут действовать, как известно,
одни лишь симметричные неизвестные, а именно групповые силы
Xi> Х 2 и Х 3. Канонические уравнения для их определения имеют
вид:
^ i 6 ii+ A ’26 1 2+ A ’361 3 + A ljD= 0 :
^ 16 2 1 + ^ 2622 + ^ 3623 + A 2^=O;
^ 16 3 1 + ^ 2632 + ^ 3633 + ^ 3^—0 .
При
обратносимметричной нагрузке,
изображенной
на
рис. 6.74, б, в основной системе (рис. 6.75, б) будут действовать
только обратносимметричные лишние неизвестные Х4, Х ъ и X Q.
Канонические уравнения для их определения имеют вид:
Х4б44+ Х5б45+ Х бб4б+А4^ = 0;
^4654 + ^ 5 6 5 5 + ^8658 + ^ 5^ —0 ;
^4бб4 + ^5бб5 + ^бббб+Л6/?= 0 .
Способ преобразования нагрузки путем разложения ее на сим­
метричную и обратносимметричную в большинстве случаев не упро­
щает вычисления грузовых перемещений А системы канонических
уравнений, а потому применение его в таких случаях нецелесооб­
разно.
246
§ 6.14. ПРОВЕРКА КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ
СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ
Коэффициенты и свободные члены системы канонических урав­
нений представляют собой перемещения в основной системе от дей­
ствия единичных неизвестных усилий и нагрузки. Эти перемещения
определяются перемножением соответствующих эпюр изгибающих
моментов. При перемножении эпюр могут быть допущены ошибки,
в результате которых значения отдельных перемещений получатся
неправильными. Решение канонических уравнений в этом случае
даст неверные значения лишних неизвестных.
Ошибки, сделанные при подсчете перемещений, как правило,
могут быть обнаружены с помощью особой проверки, которая за­
ключается в следующем. Предположим, что в качестве лишних
неизвестных при расчете n раз статически неопределимой конструк­
ции были приняты отдельные или групповые усилия Х и Х 2у о , .0
Х и - . - , Х п.
Загрузим основную систему одновременно всеми лишними не­
известными, равными единице, и построим от них в основной систе­
ме эпюру изгибающих моментов. Эта эпюра называется суммарной
единичной эпюрой. Ее ордннаты обозначим М 5. Очевидно, что для
каждого сечения рассчитываемой конструкции ордината M s равна
сумме ординат M l9 М 2, . . . , М и . . . * М п.
Умножим суммарную эпюру M s поочередно на каждую из еди­
ничных эпюр М и М 2 и т. д. В результате получим суммарные зна­
чения коэффициентов при неизвестных (единичных перемещений),
входящих в первое, второе и т. д. канонические уравнения. В самом
деле,
аналогично
^21
+
^22
+ ^23 + • * • + ба„ “ ^2S
И т. д.
Следовательно, сумма коэффициентов при неизвестных i-го
уравнения должна равняться значению 8is, где
(6.32)
Таким образом, проверка вычисленных значений единичных
перемещений, входящих в первое каноническое уравнение, состоит
247
в сопоставлении их суммы с величиной 8is:
2 e „ = e lV
(6.33)
i—1
Аналогично проверяются и коэффициенты (единичные переме­
щения) всех остальных уравнений. Такая проверка носит название
построчной (каждое уравнение — горизонтальная строка— прогеряется отдельно).
Возьмем сумму слагаемых 6 J5, 6 25, . . ., 8ns и обозначим ее ^?8:
^ = ^l*S 4“ ^ + ’ ■• + ^tlS>
2
Так как
e,, =
2
S ^ ,d s /( ^ ) .
вм =
2
$Л?.ЛГ»^/(£У),
e-, = S S M ,,A f ,d s /( f /) ,
TO
26= 2
SМ
Д 1 dS/(EJ) + 2 5 М гм , ds/(EJ) + . . . +
+ 2 S м Д п dSI(EJ) = 2 \ M S (M, + М 2 + . . . + M n) ds/(EJ) =
=
2
S ^ , M , ds/(E/) =
6 И.
* Итак, окончательно,
6, , =
и
2 S ^ Id s /(f/)
S6==S55-
(6.34)
(6.35)
Проверка коэффициентов с помощью последней формулы на­
зывается универсальной и состоит в следующем:
1 ) алгебраическим сложением определяется сумма всех най­
денных коэффициентов (единичных перемещений), входящих в
систему канонических уравнений:
^ 6 = (бХ1 4 - б22 + бо3 + . . . 4 - 8nn) 4 - 2 (б12 + б13 4 - . . . 4 - 8 ln 4 - б23 4 + S244 - . . . 4 - 82п 4- б34 4 - . . . + 6 я_ 1чЛ).
Здесь в первой скобке выписаны все главные перемещения, рас­
положенные по главной диагонали, а во второй — все побочные
перемещения, расположенные по одну сторону от главной диаго­
нали (на побочных диагоналях);
2) вычисляется 8ss= ^ ^ M l d s / ( E J ) (умножением эпюры M s
на эпюру же M s)\
3) проверяется выполнение условия (6.35).
Для отыскания ошибки в определении коэффициентов системы
канонических уравнений удобно во многих случаях пользоваться
248
неравенством
M ** > 8ikДля грузовых коэффициентов проверка сводится к следующему:
1 ) вычисляется значение
(6.36)
где Мр — изгибающие моменты от заданной нагрузки в основной
системе;
2 ) проверяется выполнение условия
2 ^ ~ ^ 1 P ^~ ^ 2 P + • • • + ^np = ^sp'
(6.37)
Как правило, можно при расчете ограничиваться лишь универ­
сальной проверкой. Если при этом условие (6.35) не удовлетворя­
ется, то для отыскания ошибки рекомендуется производить по­
строчную проверку.
§ 6.15. ПРИМЕРЫ РАСЧЕТА РАМ
Пример 1. Рассчитать симметричиую раму, являющуюся несущей конструк­
цией двухэтажного фабрично-заводского корпуса, на несимметричную нагрузку
верхиего ригеля. Жесткости разных элементов рамы различны (рис. 6.76),
J,0
■д=2кН/и
q-2KH/rt
J=2Jt
J=Ji
ЬJ
J-4Jf
J=2Jf
Заданная
система
6,0
Рис. 6.76
Рис. 6.77
P e ш e н и e. Основную систему получаем, разрезая ригели посредине
(рис. 6.77).
Эпюры изгибающих моментов от действия единичных йеизвестных усилий
изображены на рис. 6.78, а — e. Эпюра от нагрузки приведена на рис. 6.79; эта
эпюра настолько проста, что нет надобности разбивать ее на симметричную и косо­
симметричную.
Благодаря удачпому выбору основной системы ряд побочных перемещений
обращается в нуль:
6 12 = 6 15 — § 2 3 = ^ 2 4 = ^ 2 6 ~ ^ 3 5 ~ ^ 4 5 = ^ 5 6 ~ 0 '
Поэтому система канонических уравнений, состоящая из шести уравнений, раз­
делится на две системы:
249
e)
X.=/>*r-<*=/
f
TTT
Я
м,
V
у.
Рис. 6.78
а) первая система
^ А х + ^зб1з4^4б14+ Х6616= — &1р\
^ 1 6 3 1 + ^з^зз + ^ 4 ^3 4 + Х А 6 —— Л3p ;
^ 1 6 4 1 + ^ 3643 + ^ 4644 + ^ 6^46 — — ^py
Xl 6б1 + ^3^63 + ^4^64 + ^6^66 = — Аб^;
б) вторая система:
+ ^ 5 6 2 5 — — ^ 2 pt ■
^ 2 6 5 2 + ^ 5 6 5 5 = -- Abp'
^2622
Вычисляем перемещения (увеличенные в E J t раз):
6 l l = ¥
* Т
* 4 * Т
+
7Г
(2 ‘ 43 +
2 ' J0* +
2 - 4 - 10)
6 x 3 = ^.l+ + 6 .i+ ^.l4 = 5 8 ;
8i 4=
„
^
f
4+ 4
.
6U
4 4~ 10
=
H
4;
2
Oi6= — 2 — * ®“ 1 *^-=42,
633 = 6 . 1 . 1 . i - + 4 . 1 . 1 .
в34= ^ - у -
2
= 18;
взв=1-6~-2=6;
250
l+
6. 1 . 1 . y
=
17 ;
y
=
354, 7 ;
6' 6 25" fi6 -^r
2 = 79.
-75---72;
'44
46 ^ 4 - 2 - 1 8 ;
6И= 5 - 1• 1— + 6 . 1.1 . y . 2 = 7,5;
^а = ~2~ ’ ^ ' 3 ' y 2 + 4-3-3-^—^6-3-3-^=135;
6 25 =
3 - 6 - 3 .1 .2 = 54;
655= ¥
* y - 3 - - 2 + 6 . 3 . 3 - . 2 = 5S,5;
Д1^ ^ _ 6 0 0 + ^ 9 = _ 261;
' 2p
А,"
= ~ Й * Т ' 3 _ 4 ' 9 ' 3 _ ^ У ^ =:“ ,99’,2;
д
3.9.1
4.9.1
6.9.1
й7~
A'3sp n ^ ----- ^ -------- —-------- 0 — ^=—67,5;
3-2
1
A
_
**P—
6 *6 ’ 9
~2^T = - 8 1 ;
Abp = - * ^ = = - 8 l ;
A .,= - ^
= -27.
ч Для проверки подсчитанных перемещений строим суммарнуюэпюрумоментов M s от одновременного действия всех единичных неизвестных (рис. 6.80).
Й Ь ь-
~Ш^А
Рис. 6.79
Определяем выражение 2 ^ Alsds/(£V), умножая эпюру Л^наэпюруЛ!^,
и выражение 2 J M sMp ds/(EJ), умножая эпюру M s на эпюру М р:
Z f F^
= A (2 ' 4 -+ 2 , 2 2 ~ 4 , 2 -2 )+ 6^ (2-42+ 2,82+4-8-2)+
251
+ ^ ( 2 . 1 2 2 + 2 - 2 4 2 + 1 2 . 2 4 - 2 ) + ^ - ( 2 . 4 2 H-2-22— 4 . 2 . 2 ) +
+ g i - (2.22 + 2 - 2 2 - 2 . 2 - 2 ) + ^ . 1 . 12= 1324,7;
Ж*Мя ^ = - Щ
1 + + з ) - ^ ( 4 + 8 ) - ^ ( 1 2 + 24) = 716,62.
Проверяем выполнение условия ^
J M f^ = 6 ^ :
1324,7 = 354,7+17 + 72 + 7,5+ 135 + 58,5 + 2 (58+144 + 4 2 + 1 8 + 6 + 1 8 + 54),
ИЛИ
1324,7= 1324,7.
Проверяем выполнение условия ^
J M ^ M ^ ^ = A ^:
716,62=—261 —199,12—67,5—81—81—27,
или
716,62-716,62.
Следовательно, перемещения подсчитаны правильно.
Подставляем в уравнения значения коэффициентов:
354,7Xx+58Xa+ 144Х4+42Х 6= + 2 6 1 ;
58Xi+17Xa+18X4+6Xe=+67,5;
144Xrf 18Х3+72Х 4+18Х 6= +81,0;
42Xi+6X3+ 18Х4+7,5Х 6= +27,0;
135Х2+54Х 5=+199,12;
54Ха+58,5Х5= + 8 1 ,0 .
Не приводя здесь решения уравнений, дадим только результат:
X i= +0,607;
Х4= —0,692;
X>= + 1,460;
Х5= +0,037;
Х3= +2,753;
Х 6= —0,340.
Прикладываем полученные усилия к основной системе и вычисляем изгибаю­
щие моменты в ней от этих усилий и нагрузки:
MBe= + 1,460 *3+2,753—9 = — 1,87 кН •м;
М65= —1,460*3+2,753= —1,63 кН-м;
М34= + 0 ,0 3 7 *3—0,340=—0,23 кН-м;
М43= —0,037*3—0,340= —0,45 кН-м;
М35= + 0 ,6 0 7 *4+1,460*3+2,753—9 = +0,56 кН-м;
М4б= + 0,6 0 7 *4— 1,460 •3+2,753=+ 0,80 кН -м;
М31= + 0 ,6 0 7 *4+1,460*3+2,753+0,037*3—0,340—9 = + 0 ,3 3 кН-м;
М42= + 0 ,6 0 7 *4—1,460*3+2,753—0,037-3—0,340= + 0,36 кН-м;
М13= + 0 ,6 0 7 ■1 0 + 1,460*3+2,753—0,692-6+0,037*3—0,340—9 = —0,18 кН-м;
М24= + 0 ,6 0 7 *10—1,460*3+2,753—0,692-6—0,037*3—0,340=—0,16 кН-м.
Для вычисления изгибающих моментов можно применить и следующий прием.
Умножим единичные эпюры (см. рис. 6.78) на соответствующие значения неизвест­
ных. Так, все ординаты эпюры от Х г= \ (см. рис. 6.78, а) умножим на +0,607,
ординаты эпюры от Х2= 1 (см. рис. 6.78,6) — на +1,460 и т. д.; тогда получим
эпюры, показанные на рис. 6.811. Сложим полученные эпюры и прибавим к ним
1
Не рекомендуется вмеСто вычерчивания новых эпюр пользоваться единич­
ными эпюрами, изменяя в них цифры; это бывает источником ошибок.
252
Рис. 6.81
эпюру от нагрузки (см. рис. 6.79). Суммарная эпюра и будет окончательной эпю­
рой изгибающих моментов для заданной статически неопределимой системы. Лег­
ко видеть, что моменты в узлах будут те же, какие были найдены выше:
Л15в= + 4 ,3 8 + 2 ,7 5 —9 = —1,87 кН-м;
Л734—+ 0,11—0,34= —0,23 кН*м;
М35= + 2 ,4 3 + 4 ,3 8 + 2 ,7 5 —9 = + 0 ,5 6 кН-м;
M31= + 2 ,4 3 + 4 ,3 8 + 2 ,7 5 + 0 ,l1—0,34—9 = +0,33 кН *м;
M13= + 6,07+ 4,3S + 2,75—4 ,1 5 + 0 ,ll—0,34—9 = —0,18 кН-м
и т. д.
Окончательная энюра изгибающих моментов приведена на рис. 6.82,
Рис. 6.83
253
Пример 2. Рассчитать симметричиую двухпролетиую раму, загруженную
горизонтальной сосредоточенной силой (рис. 6.83).
P e ш e и и e. Заданная рама трижды статически неопределима. Обращаем
ее в статически определимую, изображенную на рис. 6.84.
Для того чтобы получить единичные
эпюры только симметричиыми или косо­
симметричными, примем за неизвестные
групповые силы:
Х г— две горизонтальные силы,
расположенные кососимметрично;
у
Х 2— вертикальная сила на средней
«*£ опоре;
Х 3— две горизонтальные силы,
расположенные симметрично.
Рис. 6.84
Единичные эпюры приведены на
рис. 6.85, а, б, в.
Внешняя нагрузка для удобства вычислений также разбита на симметричную
и кососимметричную (рис. 6.86); в сумме они дают заданную силу в 3 кН.
Для вычисления грузовых перемещений
будем умножать эпюру от Х г на эпюру, при­
веденную нарис. 6.86,6 (от кососимметричной
нагрузки), а эпюры от Х 2 и Х 3 (как симмет­
ричные) на эпюру,
изображенную на
рис. 6.86, а.
Очевидно, что
6i9=6i3=0*
X,--t
Рис. 6.85
Поэтому канонические уравнения будут иметь следующий вид:
Xi$ii = — Aip',
X2$22 4"^3^23--- ^ 2 р\
^2$32 + ^ 3 6 3 3 = -- ^3jD*
Вычисляем перемещения (увеличенные в EJ± раз):
6П = 2 74
254
^ 5 . у
. 7 ,5 + ^
f
(2 .7 ,5 .7 ,5 + 2 . 10,5-10,5+ 2-7,5.10,5) 2 +
6 зз =
„10,44-7,5
c 0 10,44-10,5 „ c , „ 7 ,5 -7 ,5 c M c .
2 ----^ ---- - 8,5 + 2 -----— ------ 9 ,5 + 2 -"2'2 * &=70Э,6;
2-3
2*3
10,44.5.9,5 = +165,3;
623 —2
2-3
*ip = 2
2.3
2-1
= +2835,9;
A,„ = 2 1 0 ’t * l 5 - = +52,2;
2P
2-3
10,44.4,5.9,5
= :+ 148,77.
&3p~2
2-3
После подстановки коэффициентов получим каноническне уравнения:
2253,lX j=—2835,9;
58Х2+165,ЗХ3= —52,2;
165,ЗХ2+ 709,6 X 3= — 148,77,
Из этих уравнений получаем:
* i = - l ,2 5 9 ;
Х 2——0,900=—0,9;
А3= 0 .
Находим изгибающие моменты:
М^ъ— 1,259*7,5=9,44 кН*м;
M5i= 1,259*10,5+0,9-5—4,5—15,75—2,53 кН*м;
Мьь= —1,259*10,5+0,9*5—4,5+15,75=2,53 кН*м;
Мв5= _ 1 ,2 5 9 .7 ,5 = —9,44 кН*м;
Af5a= — l,259.21 + 31,5=5,06 кН-м.
Можно было так же, как и в предыдущем примере, помножить каждую еди­
ничную эпюру на соответствующее значение неизвестного1, а затем полученные
эпюры сложить и прибавить к ним эпюру от нагрузки.
Окончательная эпюра изги­
бающих моментов приведена на
рис. 6.87. Следует отметить, что
решение данной задачи можно
значительно упростить с по­
мощью следующих соображений.
Если к заданной статически не­
определимой системе вместо од­
ной силы слева (см.рис. 6.83) при­
ложить две симметрично располо­
женные силы, то такие силы ни­
какого изгиба в раме не вызовут,
так как в ней возникнут лишь
продольные усилия 2. А так как
Рис. 6.87
заданная нагрузка может быть
разложена на симметричную и
кососимметричную, то окончательная эпюра моментов должна быть в точности
такой же, как и от одной кососимметричной нагрузки. Следовательно, горизон-'
_ 1 Все ординаты единичной эпюры Мг умножить на — 1,259, а ордннаты эпюры
М 2 на —0,9.
2
В этом нетрудно убедиться, приняв в качестве основной систему, получен­
ную из заданной путем установки шарниров в узлах 4 и 6 и отбрасывания гори­
зонтального стерженька в узле 2. В этой основной системе от указанной симмет­
ричной нагрузки изгибающие моменты не возникнут. Поэтому все свободные члены
системы канонических уравнений (а следовательно, н неизвестпыеусилия) будут
равны нулю*
255
тальиые составляющие опорных реакций крайних опор должны быть направлеиы в одиу стороиу и равны между собой, а потому можно сразу сказать, что
X 3=O, в чем мы убедились лишь после решения уравнений.
Далее, симметричная составляющая нагрузки в действительной раме должиа
у узла 5 давать изгибающий момент, равный нулю, а между тем для статически
определимой системы по рис. 6 .8 6 , а этот момент получился равным —4,5 кН-м.
Следовательно, он должен компенсироваться изгибающим моментом от неизвест­
ных сил. Из этих сил только Х 2 и Х 3 дают одинаковые моменты справа и слева от
узла 5 (рис. 6 .8 6 , б, e), поэтому
'^™
6
именно от них моменты в узле 5
должны быть в сумме равны
43
JJ
JJ
+ 4 ,5 кН*м; но так как Х3 = 0 ,
1j53 Заданная
yW i
то в узле 5 момент только от од­
система
ной силы Х 2 должен быть равен
г
1
+
4,5 кН*м. Поэтому
Ш] /6,0
12,0
12,0
—5Х2 = +4,5;
Рис. 6 .8 8
Х2 = - ^ = - 0 , 9 к Н .
О
Таким образом, две неизвестные силы Х 2 и Х 3 мы можем найти непосредствен­
но, а потому нам иужно было решить в сущности только одно уравнение для X ^
которое требует вычисления лишь перемещений 6 П и AVp.
Из этого примера видно, что иногда довольно сложная рама может быть рас­
считана чрезвычайно просто.
Пример 3. Рассчитать симметричную трехпролетную раму моста под шоссей­
ную дорогу (рис. 6 .8 8 ) на вертикальную равномерную загрузку первого и второго
пролетов. Построить эпюры изгибаюf3KH
g
щих моментов, поперечных и продоль­
ных сил.
5
X
4
\
P e ш e н и e. Основную статичес­
Оснобная
система
ки определимую систему примем по
хЛ
'xs х1
Ь
'*
1
рис. 6.89. Эпюры изгибающих момен­
V
1
тов от единичных неизвестных усилий
приведены на рис. 6.90, а — д*. Эпю­
ры от нагрузки, разделенной на сим­
Рис. 6.89
метричную и кососимметричную, при­
ведены на рис. 6.91, а, б.
Из рассмотрения этих эпюр непосредственно видно, что
ИТГIНItlHlll E
3
^13“ ^15~ ^23= ^25“ ^3 4 “ 645 —0 .
Поэтому система из пяти канонических уравнений (по числу неизвестных) разо­
бьется на две системы: из двух и из трех уравнений.
В одну систему войдут только неизвестные с симметричными эпюрами:
^ A i + ^ 2 $ 1 2 + ^ 4 ^ 1 4 = — A i p*
X 1621 + ^ 2^22 + ^4^24 = -- ^2 р\
^l$4l + ^2^42 + ^4$44 = -- ^4р‘ В другую систему войдут только неизвестные с кососимметричными эпюрами:
^3$33 + ^5$35= -- АЗр]
^3^53 + ^5^55 = --A5p'
Можно для облегчения вычислений принимать на эпюрах не те значения
ордииат, которые получаются от X = 1, а увеличенные или уменьшенные в опреде­
ленное число раз. Например, вместо ординаты, равной единице, в эпюре М 3
(рис. 6.90, в) можно взять ординату, равную 3; тогда избежим дробной величины
U в XU пролета. Конечно, после решения уравнений получится значение X s
в три раза меньше действительного, но когда будем строить окончательную эпюру,
то единичную эпюру с преувеличенными ординатами умножим на преуменьшенное
значение Х 3 и потому результат будет правильным.
1
256
Af/
D)
1 . 5 Ф _________ J*"I*A,SKH
ff)
%Ш/н
C
<*^,
N\c^
^ £МJй £
,Г ^ ^ ^
>
.
^
, 1
1,5кН/н
^
Рис. 6.91
Вычисляем перемещения (увеличенные в E J 1 раз):
.
. 0 9-9-6 . 16-9-9
, с ..
6“
=+2^
0 + ^ Т - =+648;
, 0 9 -9 -1 . 16-9-1 __ . _ Q
1а=
2П75
4
' 5
6 ,, =
_^2=_432;
622 = +
2 ^ +
с
16-1.12
^ U
+ 16j
6г4 — ---------^— = — 48;
, 0 12-12-8 , 16-12-12
|ПСЛ.
04< = + 2 ~2~3 ~~*------ 4-----= + 96°;
9 № 2418
257
l6 -108— %•• 16•96^ 9
^ p -
i
4
= + 1584;
Подставив найденные значеиня коэффициентов в уравнения, получим:
648Хх+ 90Х а—4 3 2 X4= —1584;
90Хх+ 16Х2—48Х4= —176;
—432Хх—48Х2+960Х4= + 4 7 0 4 ;
13,ЗЗЗХ3—16Х5= —144;
—16Х3+576Х5= + 4320.
После сокращения первого уравнения на 18, второго на 2, третьего на 48,
четвертого на 8/3 и пятого на 16 получим:
36X i+ 5Х.2—24Х4= —88
45Хх+ 8 Х 2-2 4 Х 4= ^ 8
—9Хх—Х2+20Х 4= + 9 8
5Х3—6Х5= —54;
—Х3+36Х 5=270.
Решение уравнений дает:
Х1=+2,145?
Х2= —6,435;
X ,= - l,8 6 2 )
Х4= +5,543]
X j= +7,448,
Умножив каждую еднннчную эпюру на соответствующее значение неизвест­
ного и просуммировав их ординаты с добавлением ординат эпюр от нагрузки, по­
лучим окончательную эпюру изгибающих моментов (рис. 6.92).
Переходим теперь к построению эпюры поперечных сил. Вычисляем их»
пользуясь указаниями § 6.7.
Поперечная сила на крайней левой опоре
3-12
60,11
= + 12,99KHi
258
У правой опоры первого пролета ригеля (слева от узла 4)
3*12 60,11 = —23,01 кН .
Q43 =
12
У левой опоры второго пролета (справа от узла 4)
3*16 , 71,12—37,59
= + 2 6 ,1 0 кН.
Q 45 — +
16
Продолжая вычисления, получим все данные для построения эпюры попереч­
ных сил. Эта эпюра приведена на рис. 6.93, а. Пользуясь эпюрой поперечных сил,
построим затем эпюру продольных сил (рис. 6.93, б),
Из эпюр поперечных и продольных сил можно легко найтн опорные реакции.
На крайней левой опоре
fla= + 12,99 кН.
9*
259
Находнм последовательно остальные реакцин:
f lj= + 4 9 ,ll кН;
R s= + 2 3,81 кН;
R$=—1,91 кН.
Правильность определения опорных реакций R3 и Re можем проверить нокодя из того, что
tf3= X 4+ X 5= + 5,543+ 7,448= + 12,99 кН;
Яв= Х 4—Х *=+5,543—7,448=—1,91 кН. .
В заключение рассмотрим еще один пример расчета сложной рамы с контро­
лем перемещений с помощью суммарной эпюры M s и проверкой окончательной
эпюры М.
Пример. Построить эпюру изгибаю­
щих моментов для рамы, изображенной иа
рис. 6.94. Рама шесть раз статически не­
определима; жесткость всех ее стержней
одинакова.
P e ш e н и e. Основная система с
действующими на нее групповыми неиз-
P=W
4и
j£*
с:
4_y/j
Рис. 6.94
Рис. 6.95
вестными изображена на рис. 6.95. Все неизвестные делятся на две группы: кососимметричные Х г, Х 2 и Х 3 и симметричные Х4, Х5, Х 6.
Заданная на раму нагрузка кососимметрична. Из предыдущего известно, что
при действии на симметричное соору­
жение кососимметричной нагрузки воз­
никают одни лишь кососимметричные
неизвестные; симметричные же неиз­
вестные обращаются в нуль. Следова­
тельно, в этом случае придется решить
систему трех уравнений, содержащую
лишь кососимметричные неизвестные:
* A i+ X A * + * A r M i,= 0 ;
* A i+ * A a+ X3623+ A ^ = 0 ;
^l$31+ ^2^32+ ^3^33“h^3jD“ 6.
Для вычисления коэффициентов и
свободных членов этой системы урав­
нений строим эпюры изгибающих мо­
ментов, вызываемых единичным дейст­
вием групповых кососимметричных не­
известных и нагрузкой (рис. 6.96).
При подсчете значений перемещеиий
ввиду прямолинейности стержней при­
меняем способ Верещагина,
260
Определяем единичные перемещеиия (увеличенные в EJ раз):
ск о
^
1 fi 8
9
6ii = 2 ^ - • J • 5 + ^ (2-5* + 2.82 + 2.5.8) 2 + ^ ~ 16= 1196;
6js2= ^ . A -4 - 2 + 8 - 8 -8 = 565,3 я 566;
6j3 = 1 .5 .b 4 + 2.8-2 = 52;
f i i 2 = - 2 - ( 2 . 4 . 8 + 5 . 4 ) - i ^ 8 = —652;
613= 1 - 5 ~ .2 + 1 .5 - 6 ,5 - 2
8-16
2 = 218;
б2з = — ^7T ' 1*2—8-8-2 = — 148.
Определяем грузовые перемещения (увеличенные в EJ раз):
A,^ = 2 .^ (2 .8 -1 2 + 5 -1 2 )+ ^ (2 -1 6 .2 4 -1 6 .7 2 ) = - 9 2 ;
12-5 2 , 0 , „ 7 2 — 24 , „ с
Д2p = ------j - y 4 - 2 + 8 ' 8 — £— = 1 3 7 6 ;
^ ■ ъ р = ~ ^ “ 1 ' 2 — 2-8-24 = —324.
Производим проверку вычисленных коэффнцнентов. Для этой цели строим
суммарную эпюру изгнбакмцих моментов M s от одновременного воздействия
всех единичных неизвестных X i, Х 2 н Х 3 (рис. 6.97),
5 Ш
Рис. G.97
Применяем универсальную проверку:
&SS — 2
^ =
^11 “ Ь
^22 +
S 33 +
2 ( 6 x2 +
6 l3 +
623 ) =
= 1196 + 565,3 + 52 + 2 (-6 5 2 + 218-148) = 649,3.
По эпюре M s найдем
£ § М % ^ = ^ ( 2 - 1 2+ 2-62 + 2 - 1 - 6 ) + ^ ( 2 - 6 2+ 2-52+ 2-6-5)+
+ ^ -( 2 -1 0 2+ 2-62— 2-6.10) = 649,3= 6J4J
261
Подсчет единичных коэффициентов, следовательно, выполнен правильно.
Проверяем грузовые перемещения:
Д ^ = 2 Д = А ^ + А 2р+ А зя = - 9 2 + 1376 - 3 2 4 = 960;
Hc
2 .^
М гМр ~ * = — (2-ЬА2+&.\2) +
8
4 ^ ( 2 .1 0 - 2 4 + 2 -6 .7 2 -1 0 .7 2 -6 .2 4 ) = 960==A^.
Проверенные коэффициенты и свободные члены подставляем в систему кано­
нических уравнений;
1196Х1—652Х2+218Х 3=92;
—652Хх+566Х 2— 148Xg=—1376;
218Xj—148Х2+52Х 3=324.
Все уравнения системы сокращаем на 2 (для упрощення системы):
598Х1—326Х2+109Хз=46;
—326Xi+283Xz—74Х3= —688;
109Xi-74Xa+26Xg= 162.
Не приводя процесс решения уравнений, получим:
* x = -4 ,9 6 1 ;
Х 2~ —4,237;
Х3= 14,97.
Для проверки правильности решения системы уравнений подставим значения
найденных величин в третье каноническое уравнение:
—4,961*109+4,237*74+14,97 *26—162=0,009^0.
Теперь остается каждую из единичных эпюр увеличить в число раз, равное
значению соответствующего неизвестного. Результаты представлены на рис. 6.98,
W>95
21,69
79M
ЯМ
t
4,961
%^
j
U,237
4,237
Рис. 6.98
nj3T
Для получения окончательной эпюры моментов необходимо ординаты эпюр,
приведенных на рис. 6.98, суммнровать по точкам друг с другом и с ординатами
грузовой эпюры Мр (см. рис. 6.96). При суммировании считаем положительными
изгибающие моменты, отложенные снизу и справа от стержня:
М 1г= — 14,97;
M 2i= — 14,97+ 24,805=9,835;
М 32= — 14,97— 16,948+39,688— 1 2 ,0 = — 4,23;
М 34=29,94+ ЗЗТ 896— 79,376 + 2 4 ,0 = 8 ,4 6 ;
Af43= 2 9 ,94+ 33,896— 72,0-= — 8 , 164.
Окончательную эпюру изгибающнх моментов откладываем со стороны растяиутого волокна (рис. 6.99).
Необходимо еще произвести проверку окончательной эпюры изгибающих мо­
ментов.
262
'
I; Проверка равновесия узла 3 (рис. 5 .100):
2 ^ з = —4,23—4,23+8,46=0«
2. Проверка no замкнутому контуру. Ввиду постоянства жесткостей элемен­
тов подсчитываем полную площадь эпюры моментов по контуру 2—2—3—4, считая
*,23-*atfM*
W
K,97
Рис. 6.99
Рис. 6.100
часть эпюры, расположенную вне контура, положительной:
14,97 — 9,835 е , 4 ,2 3 -9 ,8 3 5 с , 8 ,4 6 -8 ,1 6 4 0 ЛЛЛП л
--------x------- 5^---------- s------- 5^---------- -------- 8 = 0,009 иО .
§ 6.16. «МОДЕЛИ» ЛИНИЙ ВЛИЯНИЯ УСИЛИЙ
ДЛЯ НЕРАЗРЕЗНЫХ БАЛОК
Если при построении линий влияния для n раз статически не­
определимой неразрезной балки в качестве основной системы при­
нять балку с n — 1 лишними связями, то в этом случае усилие в я-й
связи от груза P = 1 можно определить с помощью следующего ка­
нонического уравнения:
X i 6 n + 6 i^ = 0 ,
откуда
Х±=— 6ip/6ii.
Заменив бхр на
6 ^*,
получим
X i = 6 ^i/6 ii,
где 6 ^1 — представляет собой текущую ординату эпюры прогибов
в n — 1 раз статически неопределимой балке от загружения ее уси­
лием X i = l ; коэффициент 6 ^ является масштабом для перехода от
эпюры прогибов к линии влияния. Такой метод построения линий
влияния, как известно, носит название кинематического.
С помощью этого метода, не производя никаких вычислений,
в каждом частном случае легко установить очертание искомой линии
влияния, так как ее «моделью» всегда является эпюра прогибов
6 pi, которую можно представить достаточно просто.
На рис. 6 . 1 0 1 , б — ж приведены без вычислений ординат «мо­
дели» линий влияния различных усилий для четырехпролетной не­
разрезной балки (рис. 6 . 1 0 1 , а), представляющие собой эпюры вер:
263
тикальных прогибов от соответствующих единичных усилий, дей­
ствующих по направлениям отброшенных связей. Так, например,
«моделью» линии влияния реакции Х г первой опоры является эпюра
прогибов дважды статически неопределимой балки (рис. 6 . 1 0 1 , 6)
от действия на нее силы Х х=1.
Рис. 6.101
Кинематический метод позволяет быстро и достаточно правильно
изображать «модели» линий влияния, не производя при этом ника­
ких вычислений, и, следовательно, устанавливать в каждом част­
ном случае те участки балки, загружение которых должно произ­
водиться для получения максимальных или минимальных значений
изучаемого усилия.
Главa 7
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
МЕТОДАМИ ПЕРЕМЕЩЕНИЙ И СМЕШАННЫМ
§7 .1 . ВЫБОР НЕИЗВЕСТНЫХ В МЕТОДЕ ПЕРЕМЕЩЕНИЙ
Как уже мы выяснили (см. гл. 6 ), при расчете статически неопре­
делимой системы методом сил за лишние неизвестные принимаются
усилия в лишних связях (силы и моменты). После определения
лишних неизвестных легко могут быть найдены внутренние усилия
(M, N, Q) в произвольном сечении и перемещения (прогибы и углы
поворота) в любой точке конструкции. Следовательно, при расчете
методом сил сначала находят усилия, а потом уже перемещения.
Можно решить задачу иначе: сначала каким-либо путем найти
перемещения, а потом установить соответствующее им распределе­
ние усилий. Именно так и поступают при расчете статически не­
определимых систем методом перемещений. Принимая за лишние
неизвестные упругие перемещения, пренебрегаем влиянием про­
дольных и поперечных сил на деформации стержней, учитывая лишь
деформации изгиба. Это допущение не является новым, так как при
расчете рам методом сил влиянием продольных и поперечных сил
при определении деформаций конструкции обычно пренебрегают.
Кроме того, не делают различия между первоначальной длиной
прямого стержня и длиной «хорды», стягивающей его упругую ли­
нию. Иными словами, сближение концов такого стержня при его
изгибе не учитывают.
Установим теперь, какие перемещения стержня необходимо и
достаточно знать, чтобы можно было определить внутренние усилия
в любом его сечении. Для этого рассмотрим прямой стержень AB
(рис. 7.1, а), выделенный из какой-либо i раз статически неопреде­
лимой системы. Под влиянием действующей на всю систему (в том
числе и на стержень AB) нагрузки стержень A B изогнется и пере­
местится в новое положение A 'B ' .
Любое положение А ГВ Г стержня можно получить из начального
в результате следующих независимых перемещений:
1 ) поступательного перемещения всех точек стержня на одну и
ту же числовую величину ДА (рис. 7.1, б); при этом ось стержня
остается прямолинейной, а изгибающие моменты и поперечные силы
во всех его сечениях равны нулю;
2 ) перемещения одного из защемленных концов стержня в на­
правлении, перпендикулярном его оси, например, конца В на чис­
ловую величину ДВА; вид упругой линии и эпюра M для такого
случая изображены на рис. 7.1,e;
265
3) поворота конца А стержня на угол фА (рис. 7.1, г);
4) поворота конца В стержня на угол фв (рис. 7.1, д)\
5) перемещений точек оси стержня с двумя неподвижными и
защемленными концами от действия заданной нагрузки (рис. 7.1, e).
Очертание упругой линии стержня A B в результате поступа­
тельного смещения ДА, перемещения конца В по отношению к А
на ДВА, поворота концевых сечений на фА и фв и действия нагрузки
будет совпадать с упругой линией A 'B ' (рис. 7.1, а).
о)
Рис. 7.1
Если каким-либо путем удастся найти величины ДВА, фА и фв ,
то этого будет достаточно для определения M и Q в любом сечении
стержня (наличие поступательного смещения ДА не вызывает в нем
моментов и поперечных сил). Эти перемещения (ДВА, фА и фв)
и следует принять за неизвестные при рассмотрении отдельного
стержня.
В стержневых системах (рамах) линейные перемещения (и углы
поворота) концов стержней, жестко соединенных в узле, равны
между собой. Поэтому за неизвестные при расчете статически не­
определимых систем методом перемещений принимаются углы по­
ворота узлов и их линейные перемещения.
§ 7.2. ОПРЕДЕЛЕНИЕ ЧИСЛА НЕИЗВЕСТНЫХ
При расчете статически неопределимой системы методом переме­
щений первоначально необходимо установить общее число неизвест­
ных величин, подлежащих определению. Выше было показано, что
за неизвестные принимаются углы поворота и линейные смещения
узлов системы; следовательно, общее число неизвестных n будет
266
равно сумме чисел неизвеетных углов поворота узлов n^ и неизвест­
ных линейных перемещений узлов пл, т. e.
п = п у+ п д.
Число неизвестных углов поворота равно числу «жестких» узлов,
а потому определение пу сводится к простому подсчету числа «жест­
ких» узлов рамы Ч
«Жестким» считается такой узел, в котором концы, по крайней
мере, двух из сходящихся в нем стержней жестко связаны между
собой (например, узлы /, 2, 3, 4 на рис. 7.2, а; узлы /, 2 на
рис. 7.2, е\ узел 1 на рис. 7.2, ж).
в]
0
г
m
w 7,
eJ
v7Tr
1
2
w 7 ? $77,
Ш
v777
$
ш
Если стержни, сходящиеся в каком-либо узле системы, соеди­
нены в несколько жестких групп, шарнирно связанных между
собой, то такой узел имеет количество «жестких» узлов, равное числу
групп. Например, узел 1 на рис. 7.2, з имеет два «жестких» узла,
узел 1 на рис. 7.2, и — три «жестких» узла. На рис. 7.2, б, e, г, d
рекомендуется самостоятельно определить число «жестких» узлов.
Перейдем к определению числа неизвестных линейных смещений.
Выше (см. §7.1) было принято не учитывать деформации рам от
действия продольных и поперечных сил и не делать различия меж­
ду первоначальной длиной прямого стержня и длиной хорды, стя­
гивающей его упругую линию, т. e. считать, что первоначальное
расстояние между концами каждого прямого стержня сохраняется
® При подсчете числа «жестких» узлов не включаются узлы, угловые переме­
щения которых заданы, например жесткие закрепления, связывающие систему
с «землей».
267
и после деформации. Это позволяет при определении числа линей­
ных неизвестных смещений заменить схему данной статически не­
определимой системы ее шарнирной схемой путем введения полных
шарниров во все узлы и опорные закрепления. Перемещения всех
узлов такой системы не являются независимыми, так как смещение
одного из них может вызывать смещения ряда других узлов. Не­
обходимо выделить из них независимые перемещения.
Число независимых линейных смещений узлов системы равно
числу стержней, которое необходимо ввести в шарнирную схему
сооружения, чтобы превратить ее в геометрически неизменяемую.
Следовательно, число независимых линейных смещений узлов рав­
но степени геометрической изменяемости системы, полученной из
заданной путем введения во все «жесткие» узлы (включая и опорные)
полных шарниров.
S)
а)
г)
D
с<^y
В
I
I
I
i
А'
ztffa
Рис. 7.3
В качестве примера рассмотрим раму, изображенную на
рис. 7.3, а. Число «жестких» узлов этой рамы равно двум, т. e.
лу= 2 . Для определения числа неизвестных линейных смещений
переходим к шарнирной схеме (рис. 7.3, б), представляющей собой
изменяемую систему; для превращения ее в геометрически неизме­
няемую достаточно поставить один стержень, например опорный
СЕ (рис. 7.3, в) или диагональный АС (рис. 7.3, г). На рис. 7.3, б
штриховой линией показаны возможные перемещения сторон шар­
нирного четырехугольника; из рассмотрения этого рисунка видно,
что шарниры (узлы) В и С не могут перемещаться независимо друг
от друга. Итак, число независимых линейных перемещений в дан­
ном случае равно единице,
4
5
*) Г"
5
)
L
j^
■
'
>
■
t
^ ,,и
ч
т. е. ял= 1 .
Общее число неизвестных пе­
ремещений
7
k ^ ^ H ^
с
п = п у+ п л= 2 + 1 - 3 .
С
\
2 r
1
6
NП
Рассмотрим теперь раму,
изображенную на рис. 7.4, а.
Число ее «жестких» узлов равно
шести, следовательно, я у= 6 . Шарнирная схема рамы трижды
геометрически изменяема, так как для превращения ее в геомет­
рически неизменяемую необходимо ввести три стержня, напри­
мер, так, как это сделано на рис. 7.4, 6 . После включения этих
Щ
8 У/.
Ш
%
Рис. 7.4
268
m
стержней узел 7 будет прикреплен к «земле» с помощью двух стерж­
ней, оси которых не лежат на одной прямой; следовательно, узел
7 будет геометрически неизменяемо связан с «землей». Аналогично
: прикреплены узлы 5 и 6. Затем с помощью стержней 4—6 и 5— 4
прикреплен узел 4 и аналогично узлы 2 и 3.
Итак, число линейных неизвестных перемещений равно трем,
т. e. пд=3. Общее число неизвестных в рассматриваемой системе
равно
t i " 6+3=9.
В заключение приводим табл. 7.1, в которой указаны степень
статической неопределимости и общее число неизвестных при рас­
чете методом перемещений для систем, изображенных на рис. 7.2.
T а б л и ц а 7.1
Система
а
б
в
г
д
e
ж
3
и
Степень
статической
неопределимости
Числс> неизвестньА Х
ne ремещений
угловых
линейных
4
4
5
7
1
2
6
4
-9
15
9
3
2
2
2
2
0
0
7
7
9
1
5
11
9
1
3
3
0
0
0
6
общее
2
1
3
3
§ 7.3. ОСНОВНАЯ СИСТЕМА
При расчете методом перемещений система расчленяется на ряд
однопролетных статически неопределимых балок. Это достигается
введением в нее дополнительных связей.
Получаемая в результате этого система называется основной сис­
темой метода перемещений.
Приведем сравнение основных систем метода перемещений и
метода сил.
Рассмотрим, например, прямоугольную раму, изображенную на
рис. 7.5, а. Эта рама дважды статически неопределима. Проведя
разрез по шарниру и удалив этим две связи, получим основную
систему метода сил в виде двух балок (одной прямой и одной лома­
ной), заделанных одним концом (рис. 7.5, б). Эта система статиче­
ски определима. Введя же в систему две дополнительные связи:
одну, препятствующую повороту жесткого узла 7, а другую, пре­
пятствующую линейным смещениям узлов 1 и 2 , получим основную
систему метода перемещений (рис. 7.6). Эта система четыре раза
статически неопределима.
Таким образом:
269
1)
основная система метода сил получается удалением связей,
а основная система метода перемещений — введением связей;
2 ) переход от заданной системы к основной системе метода сил
связан со снижением степени ее статической неопределимости, а пе­
реход к основной системе метода перемещений — с повышением
степени статической неопределимости.
Основная система
г' ™ ™ <
m ;r m
0
V7m
.o
Vf777/
Рис. 7.5
Рис. 7.6
Здесь следует отметить, что введенные в основную систему ме­
тода перемещений защемляющие связи отличаются от обычного
абсолютно жесткого защемления (заделки) тем, что оказывают
препятствие лишь повороту узла и не лишают его линейной подвиж­
ности. Реакции таких связей представляют собой моменты, прило­
женные в узлах системы.
Что касается связей, уничтожающих линейные смещения, то
введение таких связей можно осуществить различными путями,
4
Рис. 7.7
Например, можно поставить раскос 0— 2 (рис. 7.7, а) или раскос
J—3 (рис. 7.7, б), или горизонтальный опорный стержень в узле 2
фис. 7.7, б), или наклонный опорный стержень в узле 1 (рис. 7.7, г).
Связь в виде раскоса 1—3 (рис. 7.7, 6) не препятствует переме­
щению узла 3, который и без того неподвижен. Она исключает лишь
перемещения узла 1 в направлении прямой, соединяющей этот узел
с узлом 3. В этом отношении от нее ничем не отличается связь в виде
опорного стержня, показанная на рис. 7.7, г.
При введении в сооружение дополнительных связей, исклю­
чающих линейные смещения узлов, предпочтение следует отдавать
связям, соединяющим узлы с «землей», а не друг с другом, т. e.
опорным стержням, а не дополнительным элементам сооружения.
При наличии в раме горизонтальных и вертикальных стержней
рекомендуется вводить горизонтальные и вертикальные (а не на­
клонные) опорные стержни; это упрощает расчет сооружения.
270
Основную систему метода перемещений, представляющую собой
заданную систему с наложенными на нее связями, препятствующи­
ми повороту и смещению узлов, можно назвать кинематически
определимой; общее же число неизвестных метода перемещений сле­
дует в таком случае называть степенью кинематической неопреде­
лимости заданной системы.
В статическом отношении основная система метода перемещений
отличается от заданной тем, что в ней возможно появление реактив­
ных моментов во введенных заделках и реактивных усилий в добав­
ленных стержнях.
Для получения основной системы метода перемещений, во-пер­
вых, во все «жесткие» узлы заданной системы следует ввести за­
делки (защемления), препятствующие повороту узлов, и, во-вто­
рых, ввести в заданную систему стержни, препятствующие линей­
ным смещениям узлов.
В качестве второго примера выбора основной системы метода
перемещений рассмотрим раму, изображенную на рис. 7.8, а . Сте­
пень статической неопределимости этой системы равна шести. Число
неизвестных при расчете ее методом перемещений также равно
шести: четыре угловых и два линейных перемещения. Введя четыре
заделки и два стержня, получим основную систему, изображенную
на рис. 7.8, б.
Перейдем к детальному изучению элементов, из которых состоит
основная система метода перемещений, т. e. к изучению однопролет­
ной статически неопределимой балки.
Рассмотрим сначала построение методом сил эпюр изгибающих
моментов в балке постоянной жесткости с одним защемленным,
а другим шарнирно опертым концом (рис. 7 .9 ,а),д л я нескольких
характерных случаев внешнего воздействия; при этом условимся
считать положительными реакции в виде сил, направленные вверх,
и реактивные моменты, действующие по часовой стрелке. В качестве
основной системы метода сил возьмем консольную (рис. 7 .9 , б)
балку (с одним защемленным и другим свободным концом). Лишним
неизвестным будет реакция подвижной опоры Х г~ R B.
При любом внешнем воздействии m значение X t можно найти
из уравнения
* i8 n + A ^ = 0 .
(7.1)
271
Умножением эпюры M i (рис. 7.9, в) на эпюру же M i найдем ве­
личину б1Ъ не зависящую от внешнего воздействия;
6lt= l 9/(3EJ).
Рассмотрим различные случаи внешнего воздействия на эту
балку.
й)
о)
Ул
и|
щ ъ
‘)
Рис. 7.10
1)
Загружение
равномерно . распределенной
нагрузкой
(рис. 7.10, а). Умножив эпюру M q (рис. 7.10,6) на эпюру M t
(см. рис. 7.9, в), определим
Л _
x« —
1
1
«р i 3 / _
f 7 * T * ~Т Т
q
? /4
Ш Т'
Решив уравнение (7.1), найдем
X 1== R B=3qU8.
Реакция опоры А
R A = ql— R в = 5ql/8.
Опорный момент в заделке А балки A B получим, просуммиро­
вав момент в этом сечении от нагрузки с моментом от Х±
фис. 7.10, e):
M AB = ~ ^ - + ^ q l l = - 4 82)
Загружение сосредоточенной силой P (рис. 7.11). Перемеще­
ние Aip получим, умножив эпюру М р на эпюру M^.
РиЧ2 , / 2
.
2EJ
\T U
\
/‘
Так как z J + u / = / и, следовательно, v = l — и , то
^ip
6E J
Решив уравнение (7.1), найдем реакцию опоры В:
^_u
2
272
Реакция опоры А
Pv
R A= P - R B = ^ - ( 3 - v * ) .
Опорный момент
M A= - P u l + ^ p - ( 3 - u ) = - ™ ( l - v * ) .
3)
Перемещение заделки на величину Д no направлению, пер­
пендикулярному оси стержня AB (рис. 7.12). Эпюры изгибающих
P
'ЪА
Эпюра M
р м " ^ } ' ' ^
щ
\ \ т
^
Рис. 7.12
Рис. 7.11
моментов в основной системе от смещения не будет, но переме­
щение по направлению X^ будет равно AlA=-A.
Из уравнения (7.1) найдем
X ^ -3 E J A /lK
Опорные реакции и опорный момент:
R ^ X ^ -3 E J A /l^
R A = —Х ±= 3 £ /Д //3;
М А = —3EJA/l2.
4)
Поворот заделки на угол ф (рис. 7.13). Перемещение по
направлению Х г от поворота заделки в основной системе
Ai<p = — ф/.
Из уравнения (7.1) найдем
Х г — 3 E Jy/l2.
Опорные реакции и опорный момент будут равныз
R B = X 1 = 3 E Jy/l2;
R A = —X t = —З£7 ф//2;
M A = 3 E Jy/lt
273
5) Действие неравномерного нагрева (рис. 7.14).
разность температур верхнего и нижнего волокон
At = h - t %.
%
Обозначим
ll* t ,* t g
Рис. 7.14
Рис. 7.13
Перемещение по направлению Х± в основной системе будет
равно:
il
h лм
2
h
здесь h — высота поперечного сечения балки.
Решив уравнение (7.1), найдем
И
ш
Хг
За Дt E J
2hl
Опорные реакции и опорный момент
будут равны:
Rв
3 a A tE J
За M E J
;
#
л
=
—
2hl
2hl
За At E J
М я=
2h
Рассмотрим теперь балку с двумя
защемленными (заделанными) концами
(рис. 7.15,'а); для расчета ее возьмем
основную систему, полученную в резуль­
тате проведения разреза посредине бал­
ки (рис. 7 .1 5,6).H a рис. 7. 15, в— дданы единичные эпюры изгибающих мо­
ментов.
При действии вертикальной нагрузРис. 7.l5
ки, при линейных смещениях заделок
(по нормали к оси балки) и при поворо­
тах заделок продольная сила Х г будет равна нулю потому, что
в каноническом уравнении
274
коэффициенты 6 3i, 6 32 _и_ грузовой член Л3от равны нулю, так как
равны нулю моменты М 3 (рис. 7.15,5).
Неизвестные Х± и Х 2 найдем из уравнений
^ i^ ii + Aiт= 0 ; ^
^ 2^22 + A2OT= 0 . 1
(7.2)
Коэффициенты этих уравнений равны:
Л
__ о
11
•
1
1
2
1
1
_ _ J L -
* ~2 *~2 ’ ^" * ~3 * ~2 ’ ~Ш7
«
_ 1
X2EJ ’ ° 3 2 -
/
1
1
EJ
_
1
~Е7'
Рассмотрим некоторые случаи воздействия на такую балку.
в
'a
SE!
Эпюра И
~?
^ ^ ^ Щ
Рис.
|д
7.16
1) Перемещение заделки на величину А no направлению, пер­
пендикулярному оси стержня A B (рис. 7.16). Перемещения в ос­
новной системе по направлениям неизвестных равны:
Ахд^=А, Д 2д^= 0 *
Решив уравнения (7.2), найдем
X ^ -l2 E J A /l* ;
Х 2 = 0.
Опорные реакции и опорные моменты будут равны;
R B = X i = — 12EJA/l*; R A = — X t = 12EJA/l*;
M A =^ —6EJA/12; M B = — 6 E J A /l\
2) Поворот заделки А на угол cp (рис. 7.17). При повороте
заделки А на угол ф в основной системе получим следующие
перемещения по направлениям неизвестных:
А 1Ч>= — /ф/2; Д2ф= ф.
275
Решив уравнения (7.2), найдем:
Х г — 6£7ф//2; Х 2= —E Jy/L
Опорные реакции и опорные моменты будут равны:
R B = Xi = 6 £ /ф //2; R A = — X t = —6 £УФ//?;
М А = 4 £ /ф //; Af в = 2EJy/l.
Полученные результаты расчета балок на рассмотренные и на
некоторые другие нагрузки приведены в табл. 7.2.
Эта таблица будет использоваться при расчете рам методом пере­
мещений. Других воздействий на балку, защемленную двумя кон­
цами, здесь не рассматриваем.
§ 7.4. КАНОНИЧЕСКИЕ УРАВНЕНИЯ
Первоначально установим общие положения, на основании ко­
торых можно составить систему уравнений, необходимую для опре­
деления неизвестных углов поворота и линейных перемещений
узлов. Для этого сопоставим заданную систему с основной системой
метода перемещений (рис. 7.18, a,6).
Основная система отличается от заданной наличием дополнитель­
ных связей, препятствующих угловым и линейным перемещениям
узлов, и появлением реактивных моментов во введенных заделках
и реактивных сил в добавленных стержнях. Реактивные моменты и
силы можно обратить в нуль, если повернуть заделки на углы, рав­
ные действительным поворотам узлов, и сместить узлы так, чтобы
линейные перемещения их также были равны действительным, т. e.
возникающим в заданной системе. После этого деформации основной
системы и усилия в ней будут равны деформациям и усилиям задан­
ной системы.
Отрицание реактивных усилий (сил или моментов) во введенных
заделках и стержнях основной системы, т. e. отрицание реактивных
усилий по направлениям неизвестных перемещений, лежит в основе
уравнений метода перемещений, подобно тому как в основе урав­
нений метода сил лежит отрицание перемещений в основной систе­
ме по направлениям неизвестных усилий.
276
T а б л и ц а 7.2
№
п/п
Схема балки и воздействия
иа иее
Эпюры изгибающих момен­
тов (ордииаты отложены со
стороиы растяиутого
волокиа) и реакции
P
^s-------->»
4_____ : ^r ^ ^ ^ ^ ^ _ ^ i
^ i ,.^
j.
^ yZ
^
^ ----------- _ J _______^
^^^^
Мл
“ s™ C.,,...._.
p p n
r^
Формулы
МА =
= - ( P //2 ) o ( l^ * ) ;
мс =
= (P//2) иЪ (3 — и);
J jP v /2 ) (3 -o * );
J W [ l + ( c,/2)]==
= (РиЧ2) (3—ы)
Л*д = -<?/*/8;
ж
R A
R,
= 5ql/8;
Rs = 3^//8
L ^"'
M A = 3EJ/t;
P/
RA = ~ R e =
/^
^
_
= — 3EJI&
M.„ .^yC
?Я
Ы fc2
_
% ='
1
^ ----------- 5fc-
Мд.
Неравномерный нагред
E ^ _ _ ^ f _____ rtS
tj-tz =At
МЛ^ —3£///2;
Лл = —Лл=3£У/Р
M A = 3E Ja At/(2h),
где h — высота по­
перечного сечения;
а — температурный
коэффициент линей­
ного расширения;
Яд = —#д =
= — 3EJoc ktf$ht)
^ ______ |'C
vl
^ uL
*w
111 I BB^^
Вщ
m
^
^
----------------------
^
— uv2P l;
M n — u2vPl;
M c = 2ulv2Pl\
R A = v 2 ([+ 2 u )P 't
R B = u2 ( \+ 2 v ) P
М л—
p
—
^
277
Продолжение
№
п/п
Схема балки и воздействия
иа нее
Эпюры изгибающих момен­
тов (орДинаты отложены со
стороны растянутого
волокна) и реакции
Формулы
МА~ —Мд =
= - q P f 12;
inTlllllllllHhiHlllfiriHlE2
RA = KB = QlP
1
8
К
M A = 4EJ/l;
MB=*2EJfl;
$л = - R n =
= — 6E Jlll
МА—Мв =
= — GEJ/P;
ччЩЦтЛ
t
10
tt
«ЙЯ
tz
я
if 'tj; ~л£
= 12E J/P
*Ш
Мд = —Mff =
НераВномерный нагреВ
'
Я л = —Ra =
См
= E JaA t/h,
где
h —высота попереч­
ного сечения; а —
температурный ко­
эффициент линей­
ного расширения;
RA — Re = 0
Коротко уравнения метода перемещения можно представить так:
* 1 = 0 , * 2= 0 , * 3 = 0 , . . .
Здесь JRi, R а, *з, • • .— реактивные моменты во введенных задел­
ках и реактивные усилия в добавленных стержнях (в основной
системе), возникающие от действия нагрузки, поворотов узлов и их
линейных смещений. Индексы у реакций соответствуют индексам
неизвестных. Число уравнений всегда равно числу введенных за­
делок, а следовательно, и числу неизвестных перемещений.
Уравнения метода перемещений — статические, это уравнения
равновесия. Уравнения метода сил — кинематические, это уравне­
ния перемещений.
278
Представим в развернутой форме первое уравнение метода пере­
мещений ( tf i= 0 ) для основной системы, изображенной на
рис. 7.18, б. Для этого реактивный момент R t заменим суммой:
Ri-Rip^rRiV*rRit*
Второй индекс у обозначений реакций указывает на то воздей­
ствие, которое является причиной появления реакции. Поэтому
^i>— реактивный момент во введенной заделке от действия нагруз­
ки (рис. 7.19, a); R u — реактив­
ный момент в заделке от поворота
этой же заделки на угол Z2; R 12—
реактивный момент в заделке от
линейного смещения узлов 1 и 2
рамы на величину Z 2.
Реактивные моменты R u и R i 2
от Zi и Z 2 можно заменить выра­
жениями
Rii = Z1r1i И R \ 2,==Z 2^12 «
Здесь Гп— реактивный момент в
заделке от поворота этой же за­
делки на угол Zi, равный единице,
т. e. 1 рад (рис. 7.19, б); r12—
реактивный момент во введенной
заделке от смещения по горизон­
тали узла 2 на величину Z 2= 1
(рис. 7.19, в).
После такой замены первое
уравнение получим в виде
Z irii+ Z 2r i 2+ ^ i ^ = 0 .
Произведя аналогичное пре­
образование второго уравнения
(JR2 = 0 ), приведем его к виду
Zlr 21 "b^ 2^22 “Ь ^ 2^ = 0 *
Рис* 7.19
В этом уравнении r 2*— реак­
тивной усилие во введенном стерж­
не, возникающее от поворота заделки на угол Zx=l (рис. 7.19, б);
г 22— реактивное усилие в стержне от линейного смещения узлов
1 и 2 на величину Z 2= 1 (рис. 7.19,e); R 2p— реактивное усилие
в стержне от действия заданной нагрузки (рис. 7.19, а).
Смысл первого уравнения состоит в отрицании момента во вве­
денной заделке, а второго — в отрицании усилия во введенном
стержне. Оба уравнения вместе образуют систему канонических
уравнений метода перемещений для случая двух неизвестных пере­
мещений. Аналогично составляется система канонических уравне­
ний и при другом числе неизвестных.
279
Так,например,вслучаечетырехнеизвестных система канониче­
ских уравнений метода перемещений имеет вид
Z 1r n + Z 2r i 2+ Z 3r 13 + Z 4r 1 i+ tfi^ = O ; ]
Zir2l4"Z2r2 2'b^3^23"b^4^24^^2^> 0j I
Z1r31 +
Z 2 r3 2 + Z 3 r3 3 + Z 4 r3 4 +
^ 3 ^ = O ;
j
'
* '
ZjA"41^- Z ^4 ~Ь"Z ^ H^Z^ 44~i“ R&p . J
2
2
3 43
0
Коэффициенты (реакции).Гп, г 22 и т. д., расположенные на глав­
ной диагонали, называются главными; коэффициенты (реакции)
Г1 2 , г 2i, г 3i и т. д. называются побочными; свободные члены R lp,
Rzp и т. д.— грузовыми реакциями. В этих уравнениях, так же
как и в уравнениях метода сил, коэффициенты при неизвестных, рас­
положенные симметрично относительно главной диагонали, равны
друг другу, т. e. связаны между собой условием взаимности rmn=
^nra (СМ. §6.2).
Система канонических уравнений метода перемещений отлича­
ется от аналогичной системы метода сил тем, что вместо коэффициен­
тов 8пТп и грузовых членов Апр, выражающих перемещения в основ­
ной системе, в нее входят коэффициенты гптп и грузовые члены R np,
выражающие реакции дополнительных закреплений в основной
системе, а вместо неизвестных усилий X — неизвестные переме­
щения Z.
§ 7.5. СТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ
И СВОБОДНЫХ ЧЛЕНОВ СИСТЕМЫ КАНОНИЧЕСКИХ
УРАВНЕНИЙ
Для определения коэффициентов и свободных членов системы
канонических уравнений метода перемещений необходимо предва­
рительно построить эпюры изгибающих моментов в основной системе
от нагрузки и от единичных неизвестных перемещений (по направ­
лениям введенных закреплений). Построение их производится с по­
мощью данных, приведенных в табл. 7.2. В качестве примера рас­
смотрим построение эпюр для основной системы, изображенной на
рис. 7.18,6.
Эпюру Мр в основной системе от заданной нагрузки для левой
стойки построим, как для балки с двумя заделанными концами при
действии сосредоточенной силь* (по данным 6 -й строки табл. 7 .2 ),
а для ригеля — как для балки с заделкой на одном конце и шарнир­
ной опорой на другом (по данным 2 -й строки той же таблицы).
Опорные моменты будут равны:
M 0l= — M 10= — Ph (1/2) (l/4 )= -P A /8 ,
так как
u = v = 1 / 2 , М 12= —ql*/8.
_ Эпюры моментов М р изображены на рис. 7.20, а . Эпюру моментов
М х от поворота заделки 1 на угол Z i= l по часовой стрелке постро280
им’в ригеле 1—2 по данным 3 -й строки, а в стойке 0—1 — по данным
8 -й строки табл. 7.2. Эпюра М х показана на рис. 7.20, б.
Построение эпюры М 2 для стоек от линейного перемещения узла
2 на Z 2 = 1 вправо выполним по данным, приведенным в 4-й и 9-й
строках табл. 7.2. В стержне
й]
1—2 моменты отсутствуют,
так как при смещении по нап­
равлению Z 2 этот стержень не
^Щ Щ Щ ^
деформируется. Эпюра М 2 по­
*V
«ч
казана на рис. 7.20, в.
____ p
После того как эпюры из­
© * **?
гибающих моментов от нагруз­
^7*Cph
<N
^
8
ки и единичных неизвестных
^^^Г
'
~
'
3
0
Состояние„Р*
перемещений в основной сис­
Ш. Wr,------------- ^ v m V?
теме построены, можно перей­
ти к определению коэффи­
циентов и свободных членов
системы канонических урав­
m
нений метода перемещений.
Все коэффициенты, а так­
же и свободные члены урав­
нений разделим на две группы:
1 ) коэффициенты, представ­
ляющие реактивные моменты
во введенных заделках;
2 ) коэффициенты, представ­
ляющие реактивные усилия
во введенных стержнях.
Коэффициенты и свобод­
ные члены, представляющие
реактивные моменты во вве­
денных заделках, определяют­
ся вырезанием узлов и состав­
лением уравнений равновесия
вида
2 ^=o.
Рис, 7.20
7
О "''
Коэффициенты и свободные
члены, представляющие реактивные усилия во введенных стерж­
нях, можно определить с помощью разреза элементов рамы и сос­
тавления уравнений равновесия сил, действующих на отсеченную
часть:
2)r=o.
Направление оси T выбирается так, чтобы уравнение получилось
более простым.
Установим следующее правило знаков для реакций заделок и
опорных стержней.
Реактивное усилие будем считать положительным, если направ­
281
ление его действия совпадает с принятым направлением поворота
или линейного смещения узла.
Пример. Определить коэффициенты и свободныечленысистемыканонических
уравнений метода перемещений для рамы, изображенной на рис, 7.18,
й)
Л
Ph
8
Растянутая
та
P e ш e н и e. Первоначально найдем реактивные моменты Rfp3 r^f, r^ ,
Реактивный момент R±p во введенной заделке от заданной нагрузки опреде­
лим, вырезав узел 1 в состоянии «Р» (рис. 7.20, а и 7.21, а).
Составив уравнение равновесия этого
узла, получим
^ M t= R ij,+ (g P l8 i - (Phl8)=0,
отсюда найдем
Rip=4eM*)+(Ph/*)Реактнвный момент гц в заделке 1 от
поворота этой же заделки на угол Zt= 1
по часовой стрелке определим, вырезав
узел 1 в состоянии «1» (рис. 7.20, б) и со­
ставив уравненнеравновесия (рнс. 7.21, б):
^ M , = r , i - ( 3 E J / f ) — (4EJ/h)=Q,
следовательно,
rjf=@EJlQ+(4EJlh).
Реактивный момент г*2 в заделке 1 от
перемещения узла 2 на Z2= l определим,
вырезав узел 1 в состоянии «2» (рис. 7.20, в
и 7.21, в):
ri2 = —6EJ/h2.
Определим реактивные усилия R 2pi
r2b г 22 во введенном стержне. Реакцию
R 2p от нагрузки определим, проведя раз­
рез / —/ в состоянии «Р» (рис. 7.20, а и
7.22, а). Составив выражение суммы проекцнй всех сил, приложенных к отсечен­
ной части, на горизонтальную ось x , по­
лучим
^X=P+Rzp-P/2=0<
n-3EJ
а ~п?
откуда
Rip=—P'2.
При проведении разреза 1—1 реак­
тивное усилие R 2p было направлено в сто­
рону принятого во втором единичном состоянии смещения узла 2, т. e. вправо.
Это направление является положительным. Полученный для реакцин R 2p знак
минус показывает, что реакция имеет противоположное направление,
Рис. 7.22
282
Для определения реакции r2j проведем в состоянии «1» (см. рис. 7.20, б) раз­
рез / —/ (рис, 7,22, б) и составим уравнение проекций сил на горизонтальную ось
XI
2*=(6£7/Л 2) + ' 21=0,
следовательно*
v
r21= —6EJ/hK
Заметим, что r2i=ffg. Это соотношение между побочными реакцнями (взаим­
ность реакцнй) аналогнчно соотношению между побочными перемещениями
Ьтп~ ^ пт вметоде сил и доказывается ниже в общем виде (см. § 7.6).
Реакцню г22 найдем, проведя в состоянни «2» (см. рис. 7.20, в) разрез 1—/
(рис, 7,22, в); нз уравнения проекцнй сил на ось x следует
^ X = -(l2 E J /h * )-(3 E J /h * )+ r ,r = 0 ,
откуда найдем
r22=(l2EJ/h*)+(3EJ/h?)= 15E J/h \
Изложенный способ определения коэффициентов и свободных членов назы­
вается статнческим, так как основан на применении обычных уравнений равновесня.
§ 7.6. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ
СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ ПЕРЕМНОЖЕНИЕМ
ЭПЮР
Во многих случаях определение реакций дополнительных за­
креплений удобно производить перемножением соответствующих
эпюр.
Этот прием целесообразно применять, например, при расчете
рамы, показанной на рис. 7.23. В этой раме с непараллельными
стойками определение
реактивных усилий во
введенном стержне ста­
тическим способом ус­
ложняется тем, что в
уравнение проекций на
горизонтальную ось по­
мимо поперечных сил
войдут и продольные
77Ш
силы.
Рассмотрим какуюРис. 7.23
либо основную систему
метода перемещений в двух единичных состояниях m и rt (рис. 7.24).
Выразим работу А пт внешних сил состояния n на перемещениях
состояния m через изгибающие моменты, возникающие в поперечных
сечениях стержней в этих состояниях [см. § 5.2, 5.3 и формулу
(7.21)]:
А пт
M mM n ds
EJ
о тк у д а
(7.4)
283
I
Приравняем теперь (на основании теоремы о взаимности работ)
работу внешних сил состояний n на перемещениях состояния tn
к работе внешних сил состояния m на перемещениях состояния n:
А пт
пт = А гпп'
тп,
НО
А„т= тттпп - 1 и А тп = гпт- 1 ,
следовательно,
(7.5)
^ттьп ^nin'
Это соотношение выражает теорему о взаимности реакций и
формулируется так: реакция по направлению «я» от единичного
смещения связи «т» равна реакции по направлению «т» от единич­
ного смещения связи «я».
Пример. Определить коэффициенты г12 и г22 для рамы, рассмотренной в
предыдущем прнмере.
Р е ш е н н е . Перемножив эпюры M i и М 2 (см. рис. 7.20), получнм
h
6EJ 2E J
6EJ 4E J
М ХМ% ds
EJ
6EJ |
h2
h
h2
h
6EJ 4EJ , 6EJ 2EJ
6EJ
1
h2
h 1 h2
h J
№ ’
что совпадает с результатом статического определения г±2 (см. § 7.5).
Для определения главной реакции г22 необходимо умножить эпюру М 2 на
ту же эпюру М 2:
36 (EJ)*
. • 2 — 36 (EJ)2 +
Г22—^ J
E J — 6EJ
h*
№
h-3EJ
2 3EJ 1
15EJ
A2-2 ’ 3 ’ h2. \
№
что также совпадает с результатом статического определения г22.
Для определения реакцнй, возникающих от внешней нагрузки, рассмот­
рим два состояния основной снстемы: состояние «р» прн действии заданной
нагрузкн н единичное состоянне «п» (рис. 7.25, а , б).
Работа внешннх сил состояння «p» на перемещениях состояния «я»
Г\2 =
А р п ~ Р&рп + Rn P *1*
Работа внешних снл состояния «л» на перемещениях состояния «ря
Anp =
284
0.
На основании теоремы о взаимности работ
A -p n
-- A
np
и, следователь m ,
R np=
Р&рп*
Здесь $рП— перемещение статически неопределимой основной системы в состоя­
нии т» по направлению нагрузки P (силы состояния «р»). При P = 1 это со­
отношение прнводится к внду
Гпр=
&рпt
(7*Q
оно по существу представляет взаимность реакции и перемещения.
Для определения дрп возьмем в ка­
честве единичного состояния статически
определимую балку, заделанную одним
концом, и приложим к ней силу P = 1
по направлению нскомого перемещения.
Эпюру изгнбающих моментов в этом со­
стоянии от P = 1 назовем Жр (рис. 7.25,м в).
). В)
Умножив эпюру Мр на эпюру Мп,
получим
'pn
EJ
Подставнв значенне Ьрп в выражение peакцни R npy найдем
м: МEпJds
ч&
Рис. 7.25
Внеся множитель P под знак интеграла н заменив произведение
PMp = M'p,
получим
Rnp—
(7.7)
EJ
где Мр— ординаты эпюры изгнбающих моментов от нагрузки P в любой статическн определимой системе (полученной из заданной системы нлн основной систе­
мы метода перемещений устраненнем лишних
связей, в том числе обязательно и той связи,
реакция которой определяется).
Итак, для получения реакции в n-й связи
от заданной нагрузки необходимо умножить
эпюру изгибающих моментов в статически опре­
делимой снстеме (полученной из заданной статическн неопределимой системы или основной сис­
темы метода перемещений с обязательным отбрасываннем n-й связн) от нагрузки на эпюру изги­
бающих момеитов М п от единичного смещения
rt-й связи в основной системе метода перемеще­
ний н знак результата нзменить на обратный.
Рис. 7.26
Пример. Определить реакцни R ip н R2p
для рамы, рассмотренной в примере § 7.5.
Статически определимая система и эпюра моментов Мр для этой системы
от нагрузки показаны на рнс. 7.26.
Р е ш е н н е . Умножив эпюру Мр на эпюру М± (см. рис. 7.20,6), получим
M id s
2 qP
1
1 3EJ
R = - E j * M pi p
1
8
EJ
2
з
EJ
2EJ
qP , Ph
8
8
EJh
28S
Для определения R ip умножим эпюру Мр на эптору Л12 (см. рнс. 7.20, в):
D
V Г »,' тт ds
1
Ph h 1
2
6EJ
P
R ip — Z d J ^
EJ ~
2 ' 2 ’ 2 ' EJ ' 3 ’ Л* ~
2 Эти результаты совпадают с теми, которые были получены в § 7.5 стати­
ческим путем.
§ 7.7. ПРОВЕРКА КОЭФФИЦИЕНТОВ И СВОБОДНЫХ ЧЛЕНОВ
СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ МЕТОДА
ПЕРЕМЕЩЕНИЙ
Проверка правильности вычисления коэффициентов системы
канонических уравнений метода перемещений выполняется анало­
гично проверке коэффициентов уравнений при расчете_ конструкций
методом сил (см. §7.5). Для этого строится эпюра M s в основной
системе алгебраическим суммированием всех единичных эпюрз
M s = М г + Л12 + . . . + М п = 2 М р
i= 1
Умножив эту эпюру последовательно на каждую из единич­
ных эпюр, получим сумму коэффициентов при неизвестных в со­
ответствующем уравнении._
Так, умножив эпюру M s. на эпюру M it найдем
,
_ V Г M t Ms ds
v f ^ i ( A f i + ^ 2+...+ATn)ds
ls
£*J
EJ
—^ J
EJ
**
v M i ds . V
M tM 2 ds ,
. V ' f I , M „ ds
'= 2 - " e T " +
2
- — Ш— + - " +
S= ra + r 12 + . . . + rin =
2 i =n
2
i=1
J— ш—
=3
r l i*
Аналогично, r2s = 2 r%
i и т- Д*
Следовательно, сумма коэффициентов при неизвестных *-го урав­
нения должна равняться значению ris> где
Ги
Таким образом, проверка вычисленных значений единичных
реакций, входящих в первое каноническое уравнение метода пе­
ремещений, состоит в сопоставлении их суммы с величиной г15:
i —п
2 ru = ris.
i —1
(7.9)
Аналогично проверяются и коэффициенты (единичные реакции)
всех остальных уравнений.
Такая проверка называется построчной (каждое уравнение —
горизонтальная строка— проверяется отдельно).
Возможна и другая проверка.
286
. Умножив эпюру M s на M s, получим
E
V ' f ( Mi + M 2 + . , . + A T ^ d s
C Mtis
J
EJ
~ ^ J
EJ
—
. ( s j ^ + s j ^ L + . + j : j * * L j +
+
*=
2
( L
(rii +
p ^ +
- - +
rnn) +
r 22 + • • • +
2
X
p ^ +
(ri 2 +
. . . +
" - ) -
r2П+
. . .) = 2
r9
Здесь в первой скобке выписаны все главные реакции, во второй —
все реакции, расположенные по одну сторону от главной диагонали.
Итак, результат умножения эпюры М 8 на эту же эпюру должен
равняться сумме всех коэффициентов при неизвестных в системе
канонических уравнений — универсальная проверка, т. e.
2 )г = г„,
(7.10)
где
Г- = Е 1 Ж ' Т 7 ‘
<7-11)
Проверка грузовых коэффициентов сводится к вычислению
f l * , = - s f Msi r s ■
<7-12)
умножением эпюры М р от нагрузки в статически определимой
системе (полученной из заданной системы или основной системы
метода перемещений устранением лишних связей, в том числе обя­
зательно тех, реакции в которых определяются) на эпюру M s.
Результат перемножения должен равняться сумме всех грузовых
коэффициентов в системе уравнений:
D
_
*sp —
—
(
V
j
v
f
( M i + M t + . > . + Mn)Mpds
L* J
M i M p 6s
^ y
EJ
J
M 2M p d s
^
+
S
t J
= Rip + R * p + ---+ R n p>
—
^ n M ’p
dS ^ ^
(7.13)
т. e. Rsp = ^ R .
§ 7.8. ПОСТРОЕНИЕ ЭПЮР M , Q И N В ЗАДАННОЙ СИСТЕМЕ
Перейдем теперь к построению окончательных эпюр в заданной
системе.
Эпюра M (изгибающих моментов в заданной статически неопре­
делимой системе) получается суммированием ординат эпюры М р,
построенной в основной системе от нагрузки, с ординатами единич­
ных эпюр изгибающих моментов, умноженными на значения не­
известных, т. e.
M я= Мр A^M^ZX+- A1 2Z2 +* • • • + M-n^*n*
C^*^^)
287
Правильность построения окончательной эпюры M может быть
проверена приемами, которые применялись в методе сил (см. § 6.7).
Большое значение имеет статическая проверка равновесия моментов
в узлах. Невыполнение условия равновесия узлов ( 2 ^ = 0 ) в окон­
чательной эпюре будет свидетельствовать о неправильном опреде­
лении значений неизвестных.
По эпюре M, как в методе сил, строится эпюра поперечных сил
Qy а по эпюре Q — эпюра продольных сил г. Проверка этих эпюр
также производится обычным путем (см. § 6.7). При этом имеет
,большое значение статическая проверка равновесия отдельных час­
тей рамы.
§ 7.9. РАСЧЕТ МЕТОДОМ ПЕРЕМЕЩЕНИЙ
НА ДЕЙСТВИЕ ТЕМПЕРАТУРЫ
Изменение температурного режима статически неопределимых
систем, как правило, приводит к появлению в них внутренних уси­
лий и напряжений. Лишь в некоторых случаях напряженное состоя­
ние системы не меняется с из­
aJ ©
t4
менением температуры. Одним
В
из примеров может служить
О
статически неопределимая рама,
изображенная на рис. 7.27.
В связи с тем что рама в отно­
/
$
b*t,
шении своих опорных закреп­
лений статически определима,
она при одинаковом равномер-
©
Rt
t f + t2
ном нагреве или охлаждении всех ее элементов свободно дефор­
мируется, приобретая форму, подобную начальной. При этом ни­
какие усилия в элементах рамы не появляются.
Покажем, что температурное воздействие на каждый стержень
всегда можно свести к симметричному и обратносимметричному.
Пусть стержень AB (рис. 7.28, а) с симметричным поперечным
сечением (ось стержня проходит посередине его высоты h) нагрет на
U сверху и 12 снизу. Положим, что h > U - Такоенесимметричное
температурное воздействие t сведем к симметричному воздействию
1 Возможны случаи, когда для определения продольных сил необходимо со­
ставлять дополнительные уравнения метода сил.
288
t'*i когда верхнее и нижнее волокна нагреты на одинаковую темпе­
ратуру {tx+tJ)l2 (рис. 7.28, б), и обратносимметричному f", когда
верхнее волокно имеет температуру (tx—/а)/2 , а нижнее —(^ —12)/2
(рис. 7.28, e).
Суммируя эти воздействия, получим температуру нагрева верх­
него волокна
(/i+ ^ 2)/2 + ( /j—4 )/2 = ti,
нижнего волокна
{tx+ t^/2—(tj—to)/2 = t2i
что соответствует заданному условию.
При определении переме­
Единичное состояние для
определения Afnt
щений по формуле (7.30)
V)
(
А»* = « [ ( ^ + *.)/2 ]О я +
+ а [ (ti ^2)/Л] ®м'
в случае симметричного воз­
действия получим только уд­
линение оси стержня без
искривления, так как раз­
ность tx— 12 при этом равна
нулю:
Art = «[(*i + f*)/2 ] % =
==af(/, + g / 2 ] /,
Рп-1
Эпюра Nt
/
б)
Единичное состояние для
определения A"t
1
где Q ^ t = b / (рис. 7.29, a)1.
При 'обратносимметричном
Зпюра Mn
воздействии стержень искри­
вится, но длина его оси оста­
нется прежней, так как в этом
случае температура осевого
волокна равна нулю. Взаим­
ный поворот сечений по кон­
Рис. 7.29
цам стержня при этом будет
равен:
Дш = a [(*, — t2)/h] QF = a [(^ — t2)/h] 1,
I
так как Q ^ = 1 (рис. 7.29, б)2.
Элемент основной системы метода перемещений (статически не­
определимая балка) при симметричном температурном воздействии
удлиняется, не изгибаясь. При обратносимметричном же воздей­
1 Если ось стержня не делит высоту его поперечного сечения пополам, то
вформуле температурных перемещений вместо (^i + ^)/2 следует прииимать
*a + ((*i— h)ihly> где у — расстояние от волокна, нагретого на tz, до оси
стержня.
2 Формула остается без изменения и тогда, когда ось стержня не делит высоту
его поперечного сечения пополам,
10 № 2 41 8
280
ствии в нем возникают изгибающие моменты, эпюры которых при­
ведены в 5-й и 10-й строках табл. 7.2.
Перейдем к расчету статически неопределимых стержневых
систем на действие температуры методом перемещений. Основное
отличие такого расчета от расчета на заданную внешнюю нагрузку
состоит в построении эпюры изгибающих моментов M t в основной
системе от действия температуры и определении свободных (грузо­
вых) членов системы канонических уравнений, которые в этом случае
обозначаются R lt, R 2t, . . . , R nt и представляют реакции введенных.связей в основной системе от действия температуры.
tf
t,
0
w7Tf
О
©
UС*:N
± At= j£ h
2
W
система
3
Одрашносимметричный
naspeL
тгреб
V7f77T
jA t
0
Равномерный
(симметричный)
Заданная
г
Vm7
vm
Рис. 7.30
1Г7
Пример. Рассчитать на действие температуры раму, изображенную на
рис. 7.30, а, прн £7=const.
©
й
при расчете
ремещений равио двум. Основная система показана
на рис. 7.31.
Система канонических уравнений в этом слу­
чае имеет вид:
Zirii^rZtfi2~^rRit^r Rit —0»
^ 1 ^2l + ^ 2^22 4"^2/ + ^ 2i = 0 .
Все коэффициенты при неизвестных вычисля­
ются таким же методом, как п прн действии внеш­
ней нагрузки. Свободные члены уравнений предстазляютсобой суммы реакций^*, R it н Rzt, R lt, воз­
никающих при симметричном и обратносимметрич­
ном действии температуры на основную систему.
Рис. 7.31
Для определения реактивного момента Rit в за­
делке и реактивного усилия R^t в дополнительном
стержне построим эпюру Mt в основной системе от равномерного (симметрично­
го) нагрева стержней.
Определим сначала удлинение всех стержней рамы от изменения температуры
f (температура f не вызывает удлинения стержней);
удлинение стойки 0—L
Ai=a/pfttf
удлинение стойки 2 ^ 3
Aa=a*o^
290
удлинение ригеля i —2
Ag=Qt/o/i
Ar=f t + y / 2 .
Новое расположение узлов основной системы после равномерного нагрева
показано на рис. 7.32, Из рассмотрения этой фигуры найдем величины взаимных
смещеннй узлов:
Л£0=Дз=ос/о/; A2i=A2—Aj-oс/о(Л2—Л*)? Д23=0*
Узел 1 основной системы при смещении не поворачивается, а потому эпюру
изгнбающих моментов от подсчитанных взаимных смещений узлов можно получить
^ 4 <rN.
^ -JT "'
4 ':
4r4tf
3
V7777T
Рис. 7.32
Рис. 7.33
ушожением эпюры от единичных сдвигов (4-я и 9-я строки табл. 7.2) на величины
взаимных смещений А. Вид эпюрыЛ^ и значения ее ординат приведены на рис. 7.33.
Вырезав узел 1 (рис, 7,34, а), определим Ru'6EJ
3E J
А21—0,
2>Mi = Rlt
Aio —
11
ft;
откуда
к
‘-
бЕ' ( ж
Щ
-
Проведя разрез I — / (см. рис. 7.33) и составив уравнение проекций на
горизонтальную ось x сил, действующих на отсеченную часть (рис. 7.34, 6),
f)
R?i2t
определим Rli:
^ X = (i2 E J /h l)A ti + Rlt = 0,
откуда
R x = -(l2 E J jh l)A u .
10«
291
Теперь рассмотрим обратносимметричное воздействие температуры. Зная
разность температур наружногоивнутреннего волокон & t= ti — t2 ивысоту
сечений h элементов рамы, по данным табл. 7.2 (5-я и 10-я строки) построим
эпюру Mf (рис. 7.35), Ординаты этой эпюры отложены со стороны отрицатель­
ной температуры стержня, т. e. со сто­
роны растянутых волокон стержней ос­
новной системы.
Вырезав узел / (рис. 7.36, а) и pacсмотрев условие его равновесия, определим
2 Mi = Rit + EJaAtjh^3EJaM /(2h) = 0,
следовательно,
R u = EJaAt/(2h).
Проведя разрез / —/ и составив
уравнение проекций на горизонтальную
ось X сил, действующих [на отсеченную
часть (рис. 7.36, б), найдем:
2 X = Rlt — 3EJaM/(2hh,) = 0;
R2t = 3EJaAti(2hh^).
После того как все коэффициенты
и свободные члены найдены, решением
системы канонических уравнений определяются значения неизвестных углов
поворота и линейных смещений узлов.
Rft
V
'/
# ~
3EJaAt
Zhhz
Рис. 7.36
Окончательные значення изгибающих моментов вычисляются по формуле
M = M t+ M t + M ^ i + MzZz+
...
По эпюре изгибающих моментов обычным путем строится эпюра Q , а затем
эпюра N.
§ 7.10. ИСПОЛЬЗОВАНИЕ СИММЕТРИИ
ПРИ РАСЧЕТЕ РАМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ
При расчете симметричных систем методом перемещений, так
же как и при расчете методом сил, можно применить группировку
неизвестных.
В этом случае все эпюры от единичных неизвестных будут только
симметричными или обратносимметричными. В результате такой
группировки канонические уравнения распадутся на две независи­
мые системы, в одну из которых войдут только симметричные, а
292
другую обратносимметричные неизвестные. Такой прием значи­
тельно облегчает расчет.
Рассмотрим в качестве примера раму, изображенную на рис. 7.37.
Неизвестный угол поворота узла а рамы представим в виде
суммы углов поворота Z, и Z 2, а поворот узла b, симметричного
узлу а, в виде разности Z t и Z 2 (рис. 7.38).
в
Рис. 7.37
Рис. 7.38
Горизонтальное перемещение ригеля Z 3 является обратносим­
метричным неизвестным, так как узел b (см. рис. 7.38) при этом пере­
мещается от оси симметрии рамы, а симметричный ему узел а — к
Рис. 7.39
этой оси. В этом случае система канонических уравнений метода
перемещений, состоящая из трех уравнений:
Z sn+ Z ^+ Z ^s+ R ^= 0;
Zir21+ Z 2r 22+ Z 3r 23+ t f 2<7= 0 ;
^ 1 r 31+Z2r 32+ Z 3r 33 + ^ 30 = О*
распадается на две независимые системы уравнений!
Z ^u+ Z^xs+ R ^= 0;
Z\r 31+Z3r зз+ ^зд = 0
я
Z ^ 2 2 ^ ~ R i q = ^i
293
так как
Ti s—Г 21—Г 23— г 32—0.
Эпюры изгибающих моментов от единичных групповых неиз­
вестных показаны на рис. 7.39.
*»-/
Рис. 7.40
Коэффициенты и свободные члены канонических уравнений
будут равны:
ги = 4 £ 7 //г + 3 £ 7 //+ 3 £ 7 Я + 4 £ 7 /Я = 1 4 £ Л /;
r 22= 4 E J /h + 3 E J /l+ 3 E J /l+ 4 E J /h = 14EJ/l;
Г1 з = ' 31 = —6 £ //Л 2—6 £ //Л 2 = — 1 2 £ Л / г;
r33= 27E J/hs= 27E J/l3,
так как ft= /;
R i p = - q W - , R ip——ql*/8', R Sp= 0.
294
На рис. 7.40 приведены единичные эпюры изгибающих моментов
( в основной системе с групповыми симметричными и обратносиммет­
ричными неизвестными) для П-образной рамы и эпюра от нагрузки.
Читателю предлагается проверить построение эпюр и указанные
ниже значения реакций (коэффициентов и свободных членов ка­
нонических уравнений):
ги = 2 0 £У//;
r i 2 =A 21 = 0 ;
г 22 = 1 2 £ 7 //;
г1з=^з1=— 12£7/Л2;
г33= 2 4 £ //Л 3;
г 23—т32—0;
R lp= — 3Pl/32;
R z p - —3P//16; Я #, = 0 .
§ 7 .ii. ПРИМЕР РАСЧЕТА РАМЫ
МЕТОДОМ ПЕРЕМЕЩЕНИЙ
Рассмотрим построение эпюр изгибающих моментов, поперечных
и продольных сил для рамы, изображенной на рис. 7.41, от задан­
ной нагрузки. Длины элементов рамы, соотношения моментов инерЗаданная
ции и схема нагрузки даны на том же рисунке. При расчете рамы
целесообразно использовать метод перемещений, так как степень
ее статической неопределимости (а следовательно, и число неиз­
вестных при расчете рамы методом сил) равна 4, число же неизвест­
ных (степень кинематической неопределимости) при расчете рамы ме­
тодом перемещений равно 3, т. e. меньше, чем при расчете методом
сил. Расчет проводим в указанной последовательности.
1.
Выбор основной системы. Поставим (рис. 7.42) две плаваю­
щие заделки в узлах рамы и горизонтальный стержень, препятствую­
щий горизонтальным перемещениям узлов. Неизвестные перемещения
обозначим Zi, Z 2 и Z3. В результате получим основную систему,
состоящую из двух балок, защемленных по концам, и трех балок,
защемленных одним концом и с шарнирным опиранием другого
конца.
295
2.
Построение эпюр изгибающих моментов для основной системы.
Д ля вычисления коэффициентов при неиавестных и свободных чле-
Рис. 7.43
нов канонических уравнений построим для основной системы еди­
ничные и грузовую эпюры изгибающих моментов (рис. 7 .4 3 ).
3.
Определение коэффициентов и свободных членов системы ка­
нонических уравнений приведено в табл. 7.3.
4.
Проверка коэффициентов и свободных членов системы канони­
ческих уравнений. Для контроля коэффициентов уравнений и сво­
бодных членов построим эпюру М в (рис. 7.44, а) суммированием
четырех единичных эпюр, приведенных на рис. 7.43. Умножив
296
эпюру M s на ту же эпюру M s, получим
_
V
Г
Тл2 ^5 .
J
f ss ~ 2 j J\M s
s £
F JI ~
“
+
1
£F J7 ’ 29 '
4£/
.4
3
Q
2
* °* * 3
Я
4EJ
3 ^
Q - 2 b E J f2 ( 3 £ V ' 3 £ У + 3 E J • 3 £ У ) — 3 £ V ‘ 3 E J — 3 £ У ’ 3 E J ] +
6
0 f 5E J
5E J . E J
EJ \
5E J
EJ
5E J
EJ 1
r + T ' — J
w~'~2
.
1
1
3E J
. 2
3E J .
1
1
EJ
c 2
EJ
,
[
+ wL*4"6---+
^ n r
EJ
—
-----6— 2"J +
• Т Г --- 7— • 4 - ^ - • — 1--- Г . ^ ё Т
2
O-^" •
3
4 ^ £ / • o2 * ~To“
12 • w
3
12
16 . 1 1Q , 25 . 1
5 , 6 . 1 \
691 r7 г
9 + 3 * lo + i s + 2
6 + 8"^72j
72 J ’
4
Теперь подсчитаем
(табл. 7.3):
2
Г =
or, r ^ 4^
= 3^
’
сумму
r 11 ~Ь Т22 +
всех
Г ЯЗ +
единичных
2 ( Г l2 +
Г 13 +
Г 2з) =
I !-3£/ . 0 / u J , £ 7 . E J \
+ т г + —
коэффициентов
691 п т
+ 2 (£ / + ^ ~ + ~ ) = ^
£Л
Сравнивая полученное значение коэффициентов с результатом
перемножения эпюр, убеждаемся в том, что они равны, т. e. усло­
вие (7.11) удовлетворяется и, следовательно, коэффициенты вы­
числены правильно.
Произведем проверку свободных (грузовых) членов. Для этого
построим эпюру Мр от внешней нагрузки в статически опреде­
лимой системе, полученной из заданной удалением лишних связей.
Эта эпюра изображена на рис. 7.44, б. Д ля определения суммы
всех грузовых коэффициентов умножим эпюру M s на М'р\
..,-
2
} л м < ; ж “ - т г - т - 2’25' 3 - т
6 Г~/
E J „ л . 5EJ
[ 2 ( - Д ^ - 6 б ) + ^ - 6 б] = — 3 — 6 6 + 55 = — 14.
6 EJ
Сумма грузовых коэффициентов (см. табл. 7.3) будет
2 * - 2 ,2 5 + ll,75=14.
Сравнивая эти два результата, убеждаемся в том, что усло­
вие (7.13) удовлетворяется исвободныечленынайденыправильно.
5.
Решение системы уравнений. Канонические уравнения,
отрицающие реакции во введенных связях основной системы,
имеют вид
3EJZi + EJZ2+ ~ Z 3+ 2,25 = 0;
EJZ, + ^ Z , + ^ - Z , = 0;
^ Z , + ^ Z , + 4 f ^ Z 3 + H,75 =
0.
297
T а б л н ц а 7.3
EJ
Г3 1 — 32fJ
3
Г12
EJ = 0,
Г12 = £ «^
Г32 —
^ - 2 , 2 5 = 0,
tfip = 2,25 кН*м
298
£/
— ^зр — 2,25 + 6 + 8 ^ 0 ,
,R3 _ = 11,75 кН
T а б л и д а 7.4
Номер
Грузовой
уравне­
ния
Zt
z.
Zs
1
2
3
3
1
0,3333
1
3,4167
0,1667
0,3333
0,1667
0,1805
1
3
1
0,3333
2
0,3333
3,0834
0,0556
0,7499
3
0,1111
0,0180
0,1425
—11,5135
член
—2,25
0
—11,75
—2,25
2
z<
2,0833
4,5834
—11,0695
2,0833
7,6598
3,8890
1,7001
—11,3709
—80,7956
]
Проверим правильность решения системы уравнений:
3 £ 7 - 7 , 6 5 9 8 ^ + £У-1,7001 ^
+ ^ ( - 8 0 , 7 9 5 6 ^ j ) + 2,25 = 0;
£ 7 - 7 ,6 5 9 8 ^ + ^ ^ 1 ,7 0 0 1 ^ j - + ^ ( - 8 0 , 7 9 5 6 ^ ) = 0 ;
Щ- 7 , 6 5 9 8 ^ - + Щ- 1,7001 ^j- + ^ L
( - 8 0 , 7 9 5 6 J L ) + 11,75=0.
С точностью до двух знаков после запятой получились тождества,
следовательно, значения неизвестных определены правильно.
6.
Построение эпюры изгибающих моментов. Ординаты оконча­
тельной эпюры изгибающих моментов вычисляем по формуле (7.14).
На рис. 7.45 показаны эпюры, полученные умножением единичных
зпюр на значения неизвестных
A^==iWjZi*, M 2= M 2Z2\ M 3 = M 3Z 3 .
Сложив ординаты этих эпюр сординатами эпюры М р (см. рис. 7.43),
получим окончательную эпюру изгибающих моментов, приведенную
на рис. 7.46. Ординаты окончательной эпюры даны в кН-м.
299
7. Проверка эпюры изгибающих моментов. Для проверки эпюры
изгибающих моментов вырежем узлы 1 и 2 и проведем сечение в со­
ответствии с рис. 7.47, в. Далее проверим условия равновесия.
Узел 1 (рис. 7.47, а)
11.06
12,3325
17,022— 17,0197«0.
Узел 2 (рис. 7.47, б)
11,06—12,33254-1,2751 «#0.
Сумма проекций на ось X (рис.
7.47, в)
2-3—8,674—4,2053+8—1,1222«0.
17,0197
12,8992
6,7330
Построение эпюры Q. Для пос­
троения эпюры Q воспользуемся
формулой
Рис. 7.46
Q n =
V n +
( M n - M n - J / l n .
Поперечная сила в сечении 0 (см. рис. 7.46) стойки 0— 1
Q01= 3 + 17,022/3=8,674.
Поперечная сила в сечении 1 стойки 1—0
Qio=3—2-3+17,022/3=2,674.
Поперечная сила в сечениях наклонного ригеля 1—2
Qii=Qn=—(17,01974-11,06)/5=—5,6159.
8нИ
°)
Г
^
$
У
у 7,о ю к и - м
г
_
Э
(И ^
iioM -tK v ^
fl,022KH-M
%1222к)
1, 275lK'H-M
1,1222KHi
,
fy=2кН/м
I
v_>
% 2053нН
12t 3325Ш-М
8,674KH
Рис. 7.47
Поперечные силы в сечениях стойки 2—3
Q*.=Q**=(12,3325+12,8992)/6=4,2053.
Поперечные силы в сечениях ригеля 2— 4
Q24= Q a ~ — 1,2751/3=—0,4250.
Поперечные силы в сечениях стойки 4—5
Qu=Qu=6,7330/6= 1,1222.
Эпюра Q в кН приведена на рис. 7.48.
300
T а б л иц а 7.5
Эскиз вырезаниого узла
рамы с действующими иа
него внутреииими и
внешиими силами по
эпюре Q (рис. 7.48)
s
^j
j
Щг
1
\
42
+
1 . 1222
—8
= 0
%
I
2
Г *
»%
^=^
Щ 2
^
%
2
^ 4 5 “ — 0,425,
A^ 2 = 8 - l,1 2 2 2 = 6,8778
*~
x = A'ai s i n a —
N 21 =
— 5,6159 cosa + 4,2053—
— 6,8778 = 0,
5,6159cosa-4,2053+6,8778
2
г = Л^2з -0 ,4 2 5 +
sin а
6'8778
+ 7,5525 c o s a +
5,6159 ~ —4,2053+6,8778
+ 5,6159 sina = 0
kOfiT5
£,6153
Решение уравнений
2 г = УУ45 + 0,425 = 0,
I o ,m o
т
.
Уравнения равиовесия
®
5
2
=
475
=
= 7,5525,
W2 3 = 0,425 — 7,5525 • у —
— 5,6159 . 4 ^ = — 8,5992
5
7,5515
5хт
Ч
>
2 К —Д^о—5,6159 cos ^— A^io = 5,6159 -7 ,5 5 2 5 s in P = 0
+ 7,5525 . 4 = 9 ,0 2 4 2
0
i f ^
tm _
”%
8. Проверка эпюры Q. Проведем разрез по низу всех трех стоек
и составим уравнение проекций всех сил, действующих на верхнюю
отсеченную часть, на горизонтальную ось X:
2 ^ = 2 - 3 + 8 —8,674—4,2053—1,1222=—0,0015.
9. Построение эпюры N. Для построения эпюры N вырежем по­
следовательно все узлы и из уравнений проекций на соответствую­
щие оси определим значения N. При этом условимся считать поло301
S,B778
q*2nti/M
1,1222nH
SMKH A a.m
4,2053
~*Ш
1J222
9,0242кН
Рис. 7.48
8,5992кН
Ч,425кН
Рис. 7.49
жительной растягивающую продольную силу. Расчет приведен
в табл. 7.5. Эпюра продольных сил в кН приведена на рис. 7.49.
10.
Проверка эпюры N. Проведем разрез по низу стоек и соста­
вим сумму проекций сил, действующих на отсеченную часть, на
вертикальную ось:
^ Y = —9,0242+8,5992+0,425=0.
§ 7.12. СМЕШАННЫЙ МЕТОД РАСЧЕТА
При смешанном методе расчета часть неизвестных представляет
собой усилия — силы, моменты (как при расчете методом сил),
а другая часть — перемещения — повороты, поступательные сме­
щения (как при расчете методом перемещений).
Рис. 7.50
Ознакомимся со смешанным методом расчета на примере систе­
мы, изображенной на рис. 7.50, а. Подсчитаем для нее по этажам
степень статической неопределимости и число неизвестных угловых
и линейных перемещений узлов; результат этого подсчета сведен
в табл. 7.6.
Из табл. 7.6 следует, что при расчете первого этажа заданной
системы проще воспользоваться методом перемещений, а второго —методом сил.
Метод расчета, в котором за неизвестные одновременно прини­
маются перемещения и усилия, был предложен в 1927 г. проф.
А. А. Гвоздевым.
302
Т а б л и ц а 7.6
Этажн
Первый.............
Второй . . а . .
Итого . . *. . . .
I
Степе нь
статнческой
неопределимости
Ч и сл о иеизвестиых
угловых и лииейных
перемещений
9
2
2
12
11
I!
14
Применение этого метода к рассматриваемой системе (рис. 7.50, а)
позволяет свести задачу к решению четырех уравнений с четырьмя
неизвестными вместо 11 (см. табл. 7.5) — по методу сил и 14 — по
методу перемещений. Занеизвестные удобно принять углы поворота
узлов первого этажа и усилия, возникающие в верхнем шарнире.
Основная система смешанного метода изображена на рис. 7.50, б.
Она получена удалением связей в верхней части рамы и добавлением
их в нижней.
Составим канонические уравнения смешанного метода, смысл
которых заключается в том, что в основной системе реакции, воз­
никающие во введенных связях по направлениям неизвестных
перемещений Z ± и Z 2, а также перемещения по направлениям не­
известных усилий Х 3 и X i равны нулю:
Zi rii+Zgria + Xgrxs +
Z ir 2i + Z2r 22 + X 3r 23 +
Z 163 i + z 26 32 4 - X 38 33 +
Zi64i + Z 2642 4- X 3643+
X ^ ^ + *ije = Oj
X 4r 24 + R 2p = 0;
X 4634 4 ~A3p = 0 ;
X 4644 4- A 4P = 0.
\
I
Г
_
J
Рассмотрим подробно первое из этих уравнений и установим
смысл каждого его слагаемого:
Z irn— реакция в основной системе, возникающая в первой заделке
от ее поворота на угол Zly
Z 2r12— реакция в основной системе, возникающая в первой заделке
от поворота второй заделки на угол Z2;
Х 3г13— реакция в основной системе, возникающая в первой заделке
от сил Х 3;
Х 4Г!4— реакция в основной системе, возникающая в первой за­
делке от сил Х 4;
Rip — реакция в основной системе, возникающая в первой заделке
от заданной нагрузки.
Сумма перечисленных реакций равна нулю, так как в действи­
тельности заделки нет, а следовательно, нет и ее реакции. Таким
образом, первое уравнение является уравнением статики, оно вы­
ражает мысль о равенстве нулю реактивного момента, возникающего
в первой заделке от действия неизвестных и заданной нагрузки.
Такую же мысль выражает и второе уравнение.
303
Рассмотрим третье уравнение и установим смысл каждого его
слагаемого:
Z 1 f>31— перемещение в основной системе по направлению Х 3, воз­
никающее от поворота первой заделки на величину Zu
Z 2Sз2— перемещение в основной системе по направлению Х 3,
возникающее от поворота второй заделки на величину Z 2;
Х 36 33— перемещение в основной системе по направлению Х 3 от
сил Х 3;
^ 4634— перемещение в основной системе по направлению Х 3 от
сил Х 4;
А3р— перемещение в основной системе по направлению Х 3 от
заданной нагрузки.
Сумма перечисленных перемещений равна нулю, так как в дей­
ствительности верхний шарнир не разрезан, а потому точки приложенця сил Х 3 расходиться не могут. Таким образом, третье урав­
нение выражает мысль о равенстве нулю перемещения; его можно
назвать уравнением кинематики.
Такую же мысль выражает и последнее уравнение.
Коэффициенты при неизвестных полученной системы уравнений
смешанного метода можно разделить на четыре категории:
1 ) коэффициенты, представляющие собой реакции, возникающие
от единичных перемещений, например гХ2;
2 ) коэффициенты, представляющие собой реакции, возникающие
от единичных усилий (сил или моментов), например гХз;
3 ) коэффициенты, представляющие собой перемещения, возни­
кающие от единичных переме­
щений, например б31;
4)
коэффициенты, представ­
ляющие собой перемещения, воз­
никающие от единичных усилий,
например 6 34.
Методы определения коэф­
фициентов всех этих категорий
были рассмотрены и установле­
ны выше.
В системе уравнений (7.15)
при основной системе, показан­
ной на рис. 7.50, б, только одна пара коэффициентов равна нулю, а
именно 634 = 643 = 0 , так как неизвестные Х 3— симметричны, а Х 4—
обратносимметричны. Равны нулю и грузовые члены R lp, Азр и Д4р.
Положение не изменилось бы, даже если бы нижняя часть рамы была
несимметрична, так как коэффициенты 8 34= 8 43 определяются пере­
множением эпюр изгибающих моментов только для верхней части
рамы (II этажа), а усилия от нагрузки P в основной системе возни­
кают лишь в правом пролете ригеля. Если бы для расчета была при­
нята основная система, показанная на рис. 7.51, с групповыми не­
известными перемещениями, то в нуль обратился бы целый ряд ко­
эффициентов и система канонических уравнений(7.15)распаласьбы
на две системы:
304
1) с симметричными неизвестными
Z%r1 1 + X 3r i3+^?ijt?“ 0l
Zi8 3 1 + X 38 33 + A 3/?= 0 (при A3^7 ^O);
2)
с обратносимметричными неизвестными
Ztf 2 2 + Х 4Г 24 + ^ 2 j t 7 - 0 i
^ 2б42+ Х 4б44+ А 4/?—0 (при Д4/?^
0 ).
Коэффициенты при неизвестных системы уравнений смешанного
метода связаны между собой соот­
ношениями:
Гтпп
?iгтпу 8т7г
fmn=
8nm»
8 д т,
(7.16)
т, e. абсолютные значения коэф­
фициентов, располагающихся на
побочных диагоналях, удовлетво­
ряют условию взаимности.
Пример. Для заданной рамы (рис. 7.52)
\
с элементами постоянного сечения тре­
буется выбрать метод расчета, составить канонические уравнения и вычислить
все их коэффициенты.
Р е ш е н и е . Для выбора метода расчета составим табл. 7.7.
T а б л и ц а 7.7
Степень
статической
неоп p едели мости
Контуры рамы
1
Левый................
Правый..............
И того................
3
I
4
Число неизвестных
углов поворота н
линейных перемещеинй узлов
6
1
7
Из табл. 7.7 видно, что если левый контур рамы рассчитать методом сил,
правый — методом перемещений, т. e. применить смешанный метод, то при
смешанном методе окажется возможным произвести расчет с помощью двух
уравнений с двумя неизвестными вместо 4 — по методу сил и 7 — по методу
перемещений.
Основная система для смешанного метода приведена на рис. 7.53. Составим
систему канонических уравнений для определения неизвестных Х х и Z2:
а
^1$11 +^2^l2+Af^ = 0; Xir21+ Z 2r22+ Rzp —0Коэффициент 6ii, представляющий собой «перемещение от силы», опреде­
лим умножением эпюры Mi (рис. 7.54) на ту же эпюру М г:
6« = ^ Г [ ¥ • Т * 4+ l (2-4* + 2.8S + 2.4.8) + 8 -2 .8 ] = i ^ .
Все величины выражеиы в кН и м.
305
7*
я
1№№»:П1П
чгт
-
дснобная 2*> *
система
Рис. 7.54
Рис. 7.53
Коэффициент 6 x2 , представляющий собой «перемещение от перемещения»,
определим исходя из геометрических соотношений (рис. 7.55):
5x2 = ad cos а = 5ф cos а — /ф.
Но угол поворота ф = 1 , а /=«=8; следовательно,
6 i2 -8 1.
Перемещение
вия силы Х±.
6 х2
положительно, так как совпадает с направлением дейст­
Коэффициент r 2i, представляющий собой «силу от силы», т. e. реакцию,
возникающую в связи 2 от силы A j = l (см. рис. 7.54), определим из условия
равновесия узла 2 основной системы, изображенного на рис. 7.57:
2 ^2 = ^2i + 8 =0,
откуда r2i = — 8 .
Заметим, что реакцию r2f можно
r тп ~
также определить из соотношения
^ m ri'
Рис. 7.58
Коэффициент г22, представляющий собой «силу от перемещения», т. e. ре­
акцию связи 2 от поворота этой связи навеличину£2= 1 (см* Рис- 7.55),onpeделим из условия равновесия узла 2 , принадлежащего основной системе и
1 Перемещение 6 i 2 может быть также найдено и с помощью теории кине­
матической цепи (см. § 5.10) Для этого угол поворота заделки 2 на величину
Z2= 1 иеобходимо представить в виде вертикального вектора (рис. 7.56), при­
ложенного к узлу 2 , и взять момент его относительно точки 1: Si2 = l *8 = 8 .
306
изображенного на рис. 7.58:
2
Af2 = rM—£ / / 2 —£ / = 0 ,
следовательно*
Г22 = 3EJ/2 .
Грузовые коэффициенты &ip и R 2p в данном случае равны:
Aijp — 0; Rzp = — ql2! 12 (см. табл. 7.2).
§ 7.13. КОМБИНИРОВАННОЕ РЕШЕНИЕ ЗАДАЧ МЕТОДАМИ СИЛ
И ПЕРЕМЕЩЕНИЙ
Сущность комбинированного приема расчета поясним на при­
мере рамы, изображенной на рис. 7.59. Раскладывая действующую
на нее несимметричную нагрузку на симметричное и обратносим­
метричное воздействия, получим два состояния рамы, изображен­
ные на рис. 7.60, а, б. Для каждого из этих состояний можно легко
Рис. 7.59
Рис. 7.60
установить число неизвестных при расчете рамы методом сил и ме­
тодом перемещений. Так, из симметрии деформации рамы при сим­
метричном ее загружении следует, что смещение ригеля 1— 2 по
горизонтали равно нулю, а поворот узла 1 равен повороту узла 2
и противоположен ему по направлению, т. e. Z 3= 0 , a Z i= Z 2
(рис. 7.61, а).
£
2
Сснодная
система,
метода
йеремщении
<' ' • *prr*
z
p
Z
'*ro
Ссно8на$
система
метода смп
Рис. 7.61
Следовательно, рассчитывая раму методом перемещений на
симметричную нагрузку, необходимо составить и решить одно
уравнение с одним неизвестным. Применяя же для этого метод сил
и используя основную систему, изображенную на рис. 7.61, б,
а также учитывая при этом, что поперечная сила Х 3 присимметрич307
ном загружении рамы равна нулю, придется составить и решить два
уравнения с двумя неизвестными.
Очевидно, что на симметричную составляющую заданной на­
грузки целесообразно рассчитать рассматриваемую раму методом
перемещений.
Основная система метода перемещений при воздействии на раму
обратносимметричной нагрузки изображена на рис. 7.62, а. Число
неизвестных равно двум. В самом деле, углы поворота узлов 1 и 2
(учитывая обратносимметричный вид нагрузки) будут как по ве­
личине, так и по направлению равны друг другу; ригель же 1—2
получит горизонтальное смещение, т. e. 1 ЪФ 0 .
$
£
^
ft
3
V777/
Следовательно, рассчитывая раму методом перемещений при
действии обратносимметричной нагрузки, необходимо составить
два уравнения с двумя неизвестными.
Рассчитывая раму на обратносимметричную нагрузку методом
сил, можно воспользоваться основной системой, изображенной на
рис. 7.62, б, в которой неизвестным усилием будет лишь поперечная
сила Х 3; момент же Х 2 и продольная сила Х% при обратносимметрич­
ном загружении равны нулю. В этом случае придется решить лишь
одно уравнение с одним неизвестным.
Таким образом, при расчете рассматриваемой рамы на обратно­
симметричную составляющую заданной нагрузки целесообразно
воспользоваться методом сил.
Сведем полученные результаты в табл. 7.8.
T а б л и ц а 7.8
Число уравнений при расчете
Загруж ение
по методу сил
по методу
перемещений
Симметричное ...................
2
1
Обратносимметричное. . .
I
2
308
Принятый
метод
расчета
Метод пере­
мещений
Метод сил
Рассмотренный выше прием расчета симметричной рамы назы­
вается комбинированным способом. Он используется при расчетах
симметричных систем на несимметричные нагрузки.
§ 7.14. ПОСТРОЕНИЕ ЛИНИЙ ВЛИЯНИЯ МЕТОДОМ ПЕРЕМЕЩЕНИЙ
Для построения методом перемещений линий влияния внутрен­
них усилий (изгибающих моментов и поперечных сил), возникающих
в том или другом сечении рамы, а также линий влияния прогибов и
Ip = f
IРЧ
Zf
P I
P
--- ■*■
а
^+
^^шт*т~
» ч
GZ^
_____________ ^ 5^ >_ ______ ,
А
77,
Ш
'
3
*l
Г
II
*Z
*
<r
Рис. 7.63
Рис. 7.64
углов поворота необходимо предварительно построить линии влия­
ния неизвестных метода перемещений.
Рассмотрим способ построения линий влияния на примере про­
детой рамы постоянного сечения, изображенной на рис. 7.63.
Каноническое уравнение для основной системы метода пере­
мещений (рис. 7.64) имеет вид
Z iru + r ip = 0 ,
откуда
%i=
r 1 p!r 11 =* ^pilf iU
так как
rip = -S p iСледовательно, «моделью» линий влияния углового перемеще­
ния является эпюра вертикальных перемещений 6pi от поворота
ващемления на угол Z±= l .
При положении груза Р = 1 в пределах правого пролета
(рис. 7.65) реакция
r i p = - ^ v ( l - v 2).
309
T а б л и ц а 7.9
Пролет
Правый
1P
1
0,8
0,6
0,4
0,2
0
0
-0,144/
-0,192/
-0,168/
-0,096/
0
Ордината линии
влияния Zi
Пролет
Левый
1P
1
0
0,0096/2/(£V)
0,8 0,144/
0,6 0,192/
0,4 0,168/
0,2 0,096/
0
0
0
0
0,0144 P/ ( EJ)
0,0192/2/(£7)
0 , 0 1 б8 / 2/(Е/)
Ордината линии
влияния Z L
—
—
—
—
0
0,0144/2/(£7)
0,0192/2/(£7)
0,0168^/(^1/)
0,0096/? j ( EJ )
0
Соответственно при положении груза P = l впределах левого
пролета (рис. 7.66)
rip = ^ v ( X - v * ) .
Для определения г ц строим единичную эпюру М г (рис. 7.67),
по которой находим
гц = 3EJ/l + 3EJH + i E J / l = 10EJ/t.
В формулах для г1р величины v и и представляют собой от­
носительные абсциссы, т. e. числа в пределах от 0 до 1 .
Величины г1р для раз3EJ
^r/
ных значений v вычисле­
ны и сведены в табл. 7.9.
В этой же таблице при­
ведены и значения ординат
линии влияния Zu подсчи­
танные по формуле Zi =
—
ния Zi изображена на
рис. 7.68. Для построения
лииии влияния изгибаю­
V//'7
щего момента в каком-либо
Рис. 7.67
сечении k левого пролета
рамы при грузе Я = 1 , рас­
положенном в этом пролете, следует воспользоваться формулой
Mb = M l - $ E J H * ) Z^ft,
где Mk — изгибающий момент в сечении k однопролстной стати­
чески неопределимой балки с защемленным правым и шарнирно
опертым левым концами,
Линия dnm m n7f
возникающий от силы P =
= 1 ; ак—расстояние рас­
сматриваемого сечения от
левой (шарнирной) опоры,
(—3E J / l2) —реакция левой
(шарнирной) опоры, воз­
никающая при повороте
узла а рамы на угол
Z ,= 1 .
Рис. 7.68
310
Формула для построения линии влияния поперечной силы Qk
имеет вид
Qb = Q Z -(3 E J/l*)Z i.
При положении груза P = 1 в пределах правого пролета фор­
мулы для М к и Qk упрощаются и приобретают вид:
М к = - (3EJ/l*) Z,ak\ Qk = - (3EJ/l*) Zt .
Построим с помощью приведенных формул линии влияния из­
гибающего момента и поперечной силы для сечения - k , взятого
на расстоянии 0,4/ от левой опоры
<--------- =------- >~
рамы.
В этом случае формула M k при гру­
зе Р — 1 , расположенном на левом про­
1 г к__________
лете рамы, принимает вид
M k = Ml1k
3EJ „
Л Л1
j2 ^1 ' ^>^ -= M l-(l,2 E J/t)Z i.
Ь ^ м и H^^-------°>М
W
.
Рис. 7.69
Следует отдельно рассмотреть однопролетную статически не­
определимую балку с защемленным концом (рис. 7.69).
При положении груза P = 1 в левом пролете рамы справа от
сечения k , т. e. при w ^ 0 ,6 (см. табл. 7.2):
M l = (u*f2) (3— w)-0,4/;
Ql = (u*/2) (3— и).
При положении груза P = 1 в левом пролете рамы слева от
сечения k , т. e. при « ^ 0 ,6 :
М£ = (и*/2) ( 3 - w ) .0 ,4 / - ( 0 ,4 /- y /) = (и2/2) ( 3 - w ) - 0 ,4 / - ( w - 0 ,6 ) /;
Ql = (uV2) (3— и) — 1.
Значения ординат М% и Q°k, подсчитанные по этим формулам,
приведены в табл. 7.10.
T а бл и ц а 7.10
К
Qk
Груз P= 1 прило­
жен в точке с от­
носительной абецнссой и» равной
0,0224/
0,0832/
0,1728/
0
0,056
0,208
0,432
0,6
0,8
1.0
Груз<Р=1 приложен в точке с от­
носительной аб­
сциссой u, равной
0
0,2
0,4
0,6
о
К
0,17281
0,0816/
0
'
<Я
—0,568
—0,296
0
При грузе P = 1 , расположенном в пределах правого пролета
рамы, ординаты линий влияния М к и Qk равны ординатам линии
влияния Zf (см. рис. 7.68), умноженным соответственно на коэф­
фициенты, равные
— (3£У//2) ^ = — (3£У//2) .0 ,4 /^ — 1 , 2 £У// и — 3EJ/&.
311
]Р Ч
!
Линия блияния @fr
I
I
Линия блияния H x
§ g^l
*>^Г
*5
<
3 ,I
&
су
f
I
J£J
Линия 8лияния(-~2~1,)
I
1
! V
$ S
£s
^^ §<
g5>> <
<
' Q
^S <
«5Г '5T<55aa<5a
I Линия блияния
fW
S? сГЗь; g>
^ .^.§5
tv
5^- C
й
§
<
ff Й
C=r <
=ь
t>
г;
Линия блияния Мк
А
В )
P 5C~avSC. Clv*-*tS
V
^^ ссЗ
^Г c^ c^-c^,
Рис. 7.70
Рис. 7.71
На рис. 7.70, а— в и 7.71, а, б приведены линии влияния
отдельных слагаемых, входящих в формулы М к и Qk. Сложением
их ординат получены линии влияния M k и Qfe, представленные
на рис. 7.70, г и 7.71, в.
Г д а в a
8
ПОЛНАЯСИСТЕМА УРАВНЕНИЙ
СТРОИТЕЛЬНОЙ МЕХАНИКИ СТЕРЖНЕВЫХ СИСТЕМ
И МЕТОДЫ ЕЕ РЕШЕНИЯ
§ 8.1. ОБЩИЕ ЗАМЕЧАНИЯ
В данной главе построена и рассмотрена полная система урав­
нений строительной механики стержневых систем. Эта система
состоит из статических, геометрических и физических уравнений.
Показана двойственность статических и геометрических уравне­
ний х. Из полной системы уравнений получена система уравнений
смешанного метода 2. Показано, что расчет любой стержневой сис­
темы, как статически определимой, так и статически неопределимой,
сводится к решению системы уравнений, которая строится по двум
матрицам, одна из которых получается путем вырезания узлов, а
вторая является квазидиагональной и строится по готовым форму­
лам.
Далее из смешанного метода получены метод перемещений и ме­
тод сил. Таким образом, в противоположность классической строи­
тельной механике, рассмотренной в предыдущих главах, изучение
идет от общего к частному. В последнем параграфе настоящей главы
приведена полная система уравнений теории упругости, записанная
в форме, аналогичной форме записи уравнений строительной меха­
ники. При изложении материала главы широко используется
матричная форма, все необходимые сведения о матрицах приве­
дены в главе 13.
§ 8.2. СОСТАВЛЕНИЕ УРАВНЕНИЙ РАВНОВЕСИЯ,
СТАТИЧЕСКИЕ УРАВНЕНИЯ. ИССЛЕДОВАНИЕ ОБРАЗОВАНИЯ
СИСТЕМ
/
Стержневая система находится в равновесии тогда, когда урав­
новешены как ее стержни, так и узлы. Процесс построения статиче­
ских уравнений рассмотрим на конкретных примерах.
На рис. 8 . 1 , а изображена простейшая стержневая система
с шарнирными узлами (номера стержней в отличие от номеров узлов
даны в скобках). В стержнях фермы при узловой нагрузке возни1 См.: J. Szabo, P. Rozsa. Die matrizenleichung von stabkonstruktionen (im
falle kleiner verschiebungen). Изд. Академии Наук Венгрии. Будапешт. 1971.
Ржаницын А. Р. Строительная механика. М., 1982.
2 См.: Pc3HUKoeP*A. Методы решения задач строительной механики на элект­
ронных цифровых машинах. М., 1964; ШапошниковН.Н., ТарабасовН.Д.,
Петров В . Б.у Мяченков В . И. Расчет машиностроительных конструкций на прочиость и жесткость. М., 1981.
313
кают только продольные силы. Из условия равновесия можно за­
писать (рис. 8 Л, б)
(8. 1)
где N nJ N K— продольные силы, возникающие в сечении «н» и «к»
(здесь и далее начало стержня будем помечать буквой «н»,
а конец— «к»).
Рис. 8.1
Составим уравнения равновесия для узла 1 (рис. 8.1,e)
2 * = 0, — Ni — N-2cosa + P x = 0 \ \
2 , 7 = 0,
- J V 2s in a + P K= 0. J
^
'
Запишем систему (8 .2 ) в матричной форме
^ S + P = 0,
(8.3)
где
А =
Г—1
L 0
—c o s a l
— матрица уравнении равновесия;
— sin a J
P = ^рЛ| — вектор внешних сил;
3о = r ^ i i — вектор внутренних сил.
VN i \
Рассмотрим ферму, изображенную на рис. 8.2, а. Составим для
узлов фермы уравнения равновесия (рис. 8.2, б). В направлении
связей, соединяющих ферму с землей* уравнений равновесия со­
ставлять не будем. Эти дополнительные уравнения порождают и
дополнительные неизвестные — опорные реакции. Будем в даль­
нейшем считать неизвестными только усилия, возникающие в стерж­
нях расчетной схемы. Если в процессе решения задачи необходимы
опорные реакции, то их легко определить из соответствующих
уравнений равновесия.
у з eл 2
2 * = 0, — Ni — N 6c o s a = 0 .
(8.4)
314
а),
f)
j
1^
з\r
jИ
IU
m
^ '^ r " j »?£?*
''Ng V , r *
N,
А
p
N s^ ;
ш
/^
<:
tt)
<г>
Yi i
/
^я
AV
\
Ж,
Л<
L
^ ^х M M ^ M XJ ___ >
;C 7
2
/
//;
йЗ
ът
*r
•w
^
/V^
л?
Рис. 8.2
У зeл 3
2 X — 0,
2^= 0,
N 3 4 - N s cos a + P = 0; ^
—N± — N b s in a — 2P = 0 .j
(8.5)
У зел 4
X = 0,
2
—N s— Na co sa = 0 ;
У = 0,—N 2— N e sin a + P = 0.
2
(8.6)
Запишем систему (8.4) — (8 .6 ) в матричной форме
(8.7)
A S + P = 0,
где
S= lNi
N,
P = [0 . P
N3 Nt
—2P
0
N5 N tf,
Р ]т. г
i
Г) *
Матрица А приведена в табл. 8.1.
T а б л и ц а 8 .1
Номера
узлов
2
2 *
Nt
^2
^3
^4
—1
^V*
^в
^
P
— cos a
1
2 *
cos a
P
— sin a
— 2P
3
—1
2 ^
—1
2 *
— cos a
*Аt
2 ^
—1
— sin a
P
315
Рассмотрим процесс составления уравнений равновесия для
систем, работающих на изгиб. Нагрузка в общем случае может быть
приложена как к узлам, так и между узлами. В случае, если на­
грузка приложена между узлами, ее можно привести к узловой,
используя грузовые эпюры метода перемещений (см. табл. 7.2).
Пример подобного приведения показан на рис. 8.3, а. После
расчета на узловую нагрузку (рис. 8.3, в) для получения оконча­
тельных эпюр моментов к
эпюрам от узловой нагрузки
необходимо добавить местные
эпюры (рис. 8.3, б). В случае
сложной нагрузки (не приве­
денной в табл. 7.2) для опре­
деления опорных моментов и
реакций можно использовать
теорему о взаимности работ
(см. § 5.2). При действии уз­
ловой нагрузки балка изгиба­
ется по закону кубической
параболы. Действительно,
^
3
-=
0,
(8 .8 )
где v — прогиб балки в мест­
ной системе координат, свя­
занной со стержнем.
Решая дифференциальное
уравнение (8 .8 ), получим
y = C 1 ^ + C 2^ + C 3X+C 4.
Задавая различныеграничные условия на концах бал­
ки, получйм кривые прогиба,
Рис. 8.3
приведенные в табл. 8 .2 .
Имея эти кривые прогибов,
можно определить опорные моменты и реакции. Для приме­
ра рассмотрим случай равномерно распределенной нагрузки,
действующей на левой половине длины балки (рис. 8.4, а). Исполь­
зуя теорему о взаимности работ, определим реакцию R A. В качестве
первого состояния возьмем грузовое состояние (рис. 8.4, а), а в ка­
честве второго — единичное состояние (рис. 8 .4 ,6 ). Подсчитаем
работу сил первого состояния на перемещениях второго и наобо­
рот (последняя равна нулю):
_/_
К А. i _ j
0
316
9
( i _ ^ + ^ ) < k = °.
Отсюда
_r
2
Аналогично вычисляются опорный момент (единичное состояниепоказано на рис. 8.4,e) и вторая реакция R 3 (единичное
состояние показано на рис.
8.4, г):
j_
М л — q J ( * — ^ г + ^ г ) d* =
'o
9 n
— 128^ ’
J_
x J 7 q L n ty *
256 if?
V tr ^
Щ+}в
12$
R ^ 4 i w - w - ) 'u -m « L
0
Для построения эпюры мо­
ментов вычислим моменты в
точках 1 и 2 (рис. 8.4, д):
M = ¥ £ ± - 9J ^ - a J L 128 4
1
128
М *8 ~
^
5l2
ft*>
M ^9q,fi
пк~т
^
^
2
= lb, ~2 “ 256 ^
*
Ч
И [Ш
i/4
^J.
— J. Ж
1 *
1/2
Q = M^
M*-.
Для более точного пос­
Рис. 8.4
троения эпюры M (нахожде­
ния экстремума) можно построить эпюру Q в балке, изображенной на
рис. 8.4, д.
Рассмотрим раму с узловой нагрузкой, показанную на рис. 8.5, а.
Выделим из рамы произвольный стержень. В общем случае по
концам стержня действуют по три внутренние силы (рис. 8.5,6).
Итого на каждый стержень действуют шесть внутренних сил,
которые связаны между собой тремя уравнениями равновесия:
2 * = 0, - N H+ NK= 0, N н = N к = N\
(8.9)
2 K = 0 , Q„— QK= 0, Q„ = QK= Q;
(8.10)
2 m H= 0,
- Q / - A f H+ M K= 0,
(8.11)
Таким образом, в соответствии с уравнениями (8.9) — (8.11)
независимыми являются три силы; примем в качестве независи~>
мых сил— силы, характеризуемые вектором s:
s=[N
М н М к] \
(8.12)
317
T а б л и ц а 8.2
v= \
4—
Зх2
2хъ-
J2 + fl
-
v= x
v—
1
Зх2
В
2x3
/2
Xе
В
'А
Зная вектор s, можно найти внутренние силы, действующие
по концам стержня. При узловой нагрузке продольная и попе­
речная силы одинаковы по длине стержня [см. (8.9), (8.10)] и
поперечная сила может быть найдена по формуле (8.11). Если
стержень имеет в начале или в конце шарнир, то необходимо
принять либо Л4Н= 0 , либо М к = 0 .
В качестве независимых сил можно принять вектор
s = [N
Q Л у*.
Тогда для определения М а используем уравнение
М н = М и— Ql.
318
(8.13)
(8.14)
г
Составим уравнения равновесия для узлов 1 и 2 (см. рис* 8.5, в, г)
и заменим поперечную силу Q по формуле (8 . 1 1 ).
Узел 1 (рис. 8.5,e)
2 X = 0 , — Qi + N 2 + P — 0 ,
^
+ N, + P = 0 ;
(8.15)
Мк2
-J V i
Узел
2
За
(рис. 8.5, г)
s in a -y ,
^X =
0,
— N 2— Q3 cos а + N 3 sin а = 0 ,
- ^ t- T
2V ' =
4
cosa^= ^;
^ 4 +
^ - |=
0;
0,
Q, — N 3c o s a —Q3s in a = 0 ,
Мк2--- /V - - ^
N 3s 4 5 - ~ 3г/
= 0’
За
5a 1иЯ4
J m = O, — М к2 + М„3+ Ра = 0.
(8.16)
(8.17)
Запишем уравнения (8.15) — (8.17) в матричной форме:
Л5 + £ =
0,
(8.18)
где
~>
Г ^
S = [sl
X = [Л ^
AfHl] T;
?2
^
sl
^H T
sjJ
;
= [vV2 УИК2]Т; s3= \ N 3 М в3 М к3]т)
P = [Р
о
0
0 Р а]\
319
T а б л и ц а 8.3
—>
Si
Номера
узлов
N
2
*
2
^
2
*
2
^
^
5з
~>
$z
мя
N
*Ua
1
^к
N
—>
P
Мн
«н
P
1
2
2 ш
—1
— 1/зЯ
—
1
1!за
—
1
%
V -*a
— 4/г5а
-V b
3/з5 а
—
1
Зк ь а
Ра
Матрица А приведена в табл. 8.3.
Сравниваявыражения(8.3),(8.7)и(8.18), видим,что уравнения
равновесия, записанные в матричной форме, в фермах и рамах
выглядят одинаково. Аналогично можно записать уравнения рав­
новесия для любой комбинированной системы.
Как указывалось выше, в качестве вектора независимых сил
можно принять силы, характеризуемые вектором (8.13), при этом
процесс записи уравнений (8.15), (8.16) ( 2 X = 0 , 2 ^ ^ 0 ) несколько
упрощается [нет необходимости переводить поперечные силы в мо­
менты (8.11)L Однако для момента M k2 в уравнении (8.17) ( 2 т = 0)
надо использовать формулу (8.14).
По матрице А можно исследовать образование стержневых
систем. Рассмотрим простейшие системы, изображенные на
рис. 8 .6 , a — д. На рис. 8 .6 , a изображена изменяемая ферма.
Матрица А имеет размер 5 x 4 , число ее строк больше, чем число
320
столбцов, т. e. число уравнений больше числа неизвестных. Таким
образом, если число строк матрицы А больше числа ее столбцов, то
система является изменяемой. На рис. 8 .6 , б изображена статически
определимая ферма. Матрица А для этой фермы квадратная 5 x 5 .
На рис. 8 .6 , в изображена мгновенно изменяемая система, состоящая
из двух стержней. Матрица А для этой системы квадратная 2 x 2 , но
вторая ее строка ( ^ Y = 0 ) нулевая и определитель матрицы А раЕен
нулю, что является признаком мгновенно изменяемой системы. Если
матрица уравнений равновесия для стержневой системы квадратная
(nXn) и определитель матрицы не равен нулю, то система является
статически определимой (рис. 8 .6 , б). На рис. 8 .6 , г изображена
статически неопределимая стержневая система. В матрицеЛ число
столбцов больше, чем число строк 5 x
?
Л
....
<
x 6 , т. e. число уравнений равнове-.
(5)
сия меньше числа неизвестных. Рас­
(А)
смотрим, наконец, стержневую сис­
1
(2)
m
*^^•^^■*^J ,' £2*
тему, изображенную на рис. 8 .6 , д.
(6)
Матрица А для этой системы имеет
7Ш
(71
('j)
размер 13x14, однако ранг системы
меньше числа ее строк, что является
ш
признаком изменяемости.
''"'
Таким образом, если число строк
*
матрицы А меньше числа ее столб­
цов (n<im) и ранг матрицы равен числу строк, то система явля­
ется статически неопределимой, причем степень ее статической
неопределимости равна разности между числом ее столбцов и числом
етрок {т—n). Равенство ранга матрицы числу ее строк обеспечивает
наличие хотя бы одной неизменяемой основной системы, т. e. при
отбрасывании лишних связей можно получить минимум одну ста­
тически определимую систему.
Исследуем матрицу А для системы, изображенной на рис. 8.7.
Для узлов /, 3 можно составить по три уравнения равновесия,
а для узлов 2 и 4 — по два уравнения, т. e.
rc = 3 x 2 + 2 x 2 = 1 0 .
^ ^ ^ M ta M H ^ H _
Стержни 1—6 содержат по два неизвестных, стержень 7 — три
неизвестных, т. e.
m = 6 x 2 + lx 3 = 1 5 .
Эта система неизменяема, следовательно, степень ее статической
неопределимости
i = m —n = 15—10=5.
§ 8.3. СОСТАВЛЕНИЕ УРАВНЕНИЙ СОВМЕСТНОСТИ,
ГЕОМЕТРИЧЕСКИЕ УРАВНЕНИЯ. ПРИНЦИП ДВОЙСТВЕННОСТИ
Стержневая система, соединенная в узлах, должна оставаться
соединенной в этих же узлах и после деформации. Уравнения, вы­
ражающие это положение, называются уравнениями совместности.
11 № 2418
321
На рис. 8 .8 , а, б показаны деформации системы, изображенной
на рис. 8.1 соответственно при смещении узла 1 на U и на У. Ввиду
малости перемещений перемещения по окружности заменены пере­
мещениями по касательной к окружности (по перпендикуляру
к стержню). Итак,
на рис. 8 .8 ,a
на рис. 8 .8 , 6
При одновременном перемещении по X и Y (U Ф 0 , V Ф 0 )'
(8.19)
Перенося правые части выражения (8.19) в левую и записывая
полученные уравнения в матричной форме, получим
(8 .20)
— co sa
Уравнения (8.20) связывают перемещения узла (U, V) с деформа­
циями стержней А1? Д 2 и являются геометрическими уравнениями
для системы, изображенной
на рис. 8 . 1 .
Применять для получе­
ния уравнений совместнос­
ти приведенные выше геометрическиепостроения для*
системы с большим коли­
чеством узлов очень слож­
но. Более удобно исполь­
зовать для этого так назы­
ваемый принципдвойственРис. 8.8
ности. Для этого рассмотрим стержневую систему, имеющую n узлов и m стержней. Все силы>
действующие на стержневую систему, делятся на внешние и внут­
ренние. К /-му жесткому узлу плоской стержневой системы мо­
гут быть приложены три силы:
Р? — вдоль оси Х\
Р \ — вдоль оси Y\
M t — момент, приложенный к /-му узлу.
Будем считать силы положительными, если они направлены вдоль
соответствующих осей. Момент положителен, если он направлен
против хода часовой стрелки. Совокупность сил P f , P f , М {
образуют вектор сил, приложенных к /-му узлу:
p t= [ p f
322
РГ
M tf.
(8 - 21)
~^
Еели узел шарнирный, то Р { имеет вид
Pi = [P? РГ]Т-
(8.22)
Совокупность всех внешних сил, действующих на n узлов, мо­
жет быть представлена в виде
P = [р ;
Р\ . . . P J . . . PI ] т.
(8.23)
■^
Если все узлы жесткие, то вектор P имеет размер 3n, если шар­
нирные, то 2 n.
Как следует из предыдущего параграфа, внутренние силы,
действующие в стержне, полностью определяются тремя силами:
Njy M Kj y М кр которые можно характеризовать вектором
% = {Nj
M Hj
M KJ] \
(8.24)
В случае, если стержень имеет два шарнира по концам, то
Sj = N p если шарнир в начале стержня, то
**^
Sj= iN j
M KJ] \
(8.25)
—
^
Аналогично можно записать вектор Sj и для случая, когда
шарнир располагается в конце стержня. Совокупность всех внут­
ренних сил, действующих во всех стержнях, может быть пред­
ставлена в виде
s = [sT
S l .. .sJ■. •4 ] Т.
(8.26)
^
В случае, если все узлы жесткие, вектор S имеет размер 3m,
если шарнирные, то равен т.
Как следует из предыдущего параграфа, векторы S и P не
являются независимыми векторами, а связаны между собой урав­
нениями равновесия узлов
AS + P = 0.
(8.27)
Каждый жесткий узел может иметь три перемещения: Ui —
вдоль оси X\ V£— вдоль оси Y; фг-— поворот. Совокупностьперемещений U i9 Vh ф(* образует вектор перемещений i-го узла
Zt = W i
Vt
Ф/]т.
(8.28)
■^
Если узел шарнирный, то вектор Z { имеет вид
Z t=[U t
V tf.
(8.29)
Очевидно, что работа внешних сил, приложенных к i-му узлу,
равна скалярному произведению вектора внешних сил Pi на век—>■
тор перемещений того же узла Z,- с коэффициентом */» (за счет
11*
323
статического приложения нагрузки):
(8.30)
Apt = i ( P r Z i ) = i - P 7 - Z t .
Второе произведение является матричной записью скалярного
произведения [см. (13.16)]. Аналогично для всей стержневой
системы можно записать
(8.31)
Ap = f , A pi = ± ( p . z ) = j P ' - Z .
/=1
-■v
w
Итак, каждому вектору внешних сил P соответствует вектор
~>
перемещений Z таким образом, чтобы их скалярное произведение
давало работу. Подобные векторы в последующем будем назы­
вать двойственными векторами.
Запишем выражение для работы внутренних сил в /-м стержне
(8.32)
A SJ-— 2 (5/ * A f') “ 2 5' ’ А л
где A sj — работа внутренних сил в /-м стержне;
формаций /-ro стержня.
—
>
Вектор Sj имеет вид
S f= [ N ,
M nJ
вектор де-
М в/]т.
Для подсчета работы, произведенной силой Nj, нужно умно­
жить числовую величину силы на удлинение стержня Д/у.
Поясним обобщенные перемещения, соответствующиемоментам
М н/у M Kj. На рис. 8.9 показан
/-й стержень до деформации (н, к)
и после деформации
к'). Про­
цесс перемещения можно пред­
ставить в виде перемещения как
жесткого целого без изгиба (на
рис. 8.9 это положение показа­
но пунктирной линией) и де­
формации относительно этого жес­
ткого смещения. На рис. 8.9
показаны углы Л ф н[j/ “и ^Дф.
т кj
соответствующие
положительным
Рис. 8.9
моментам М лн/ и М к/*, под кото­
рыми необходимо понимать углы
поворота относительно жесткого смещения. Итак, вектор Ду име­
ет вид
(V ,
А/ = Щ
А Фн/
Л ф к / ] Т-
(8.33)
Вектор деформации для всей стержневой системы
А = [Д1
324
Д 1 -..Д } ...Д ^ ]Т.
(8.34)
Запишем выражение для работы внутренних сил для всей
системы
т
,1 _*^
I. f/ ^с ^4
Л \
^ = S 4 / = T ^ ' Ai = j 5TA(8-35)
/= 1
~>
—
►
Аналогично предыдущему, векторы 5 и Д являются двойст­
венными. Очевидно, что из условия совместности деформаций
система стержней, объединенная узлами до деформации, остается
такой же системой, объединенной теми же узлами и после де—
►
формации (можно по заданному вектору перемещений узлов Z
найти вектор деформаций стержней Д). Запишем эту связь в виде
^ Z + A = 0,
(8.36)
где А г—матрица, связывающая перемещения с деформациями.
В начале параграфа подобное уравнение (8.20) было составлено
для стержневой системы, изображенной на рис. 8 . 1 .
В силу закона сохранения энергии работа внешних сил равна
работе внутренних сил:
Ар = As
или
^ P z = ^ S * А.
(8.37)
~>
Выражая из уравнения (8.27) вектор P, а из уравнения (8.36)
вектор А и подставляя эти значения в выражение (8.37), получим
— у S^A*Z= — у З м Д
(8.38)
—
V
Соотношение(8.38)соблюдается при любом Z, удовлетворяющем
кинематическим граничным условиям, следовательно,
А Х= А Т.
(8.39)
Таким образом, если два вектора ( s , я ) удовлетворяютсоотношению (8.27), а двойственные им векторы (д , z ) —соотноше­
нию (8.36), причем их скалярные произведения равны (8.37), то
соблюдается равенство (8.39). Это и есть принцип двойственности.
Таким образом, матрицы уравнений равновесия и уравнений
совместности являются взаимно транспонированными. Сравнивая
матрицы уравнений (8.3) и (8.20), убеждаемся в справедливости
принципа двойственности для системы, изображенной на рис. 8 . 1 .
Ввиду важности принципа двойственности в строительной механике
проиллюстрируем его табл. 8.4.
В табл. 8.4 в левой и правой колонках приведены двойственные
векторы. Обратим внимание на то, что в соотношениях, приведен­
ных в последней строке табл. 8.4, двойственные векторы меняются
325
местами
(8.40)
A S + P = 0;
1
I
A r Z + A = 0.
(8.41)
В соотношениях (8.40) и (8.41) стрелками помечены двойствен­
ные векторы.
Для стержневых систем, как правило, проще составлять урав­
нения равновесия; этот процесс был достаточно подробно рассмот­
рен в § 8 .2 , при этом геометрические уравнения легко записываются
на основании принципа двойственности.
T а б л и ц а 8.4
Внешние силы
Перемещения
^ и
Zi
P tп
p=
р,-
,л=
Ptx
piy
Mi
Zi
Pn
Внутренние силы
_*
^1
t
Деформации
^.
Ai
•
•
•
S=
__.^
5/
■ Sj =
Г MaJ
Ni 1
•
.
-^
$m
AS + P = 0
-Л*Кj
*
,■уr
ч.
ш
А — Ау , А/ =
_
Mj '
Афн/
_Афк/
4
^^m
Лт
Z+
~+
А =
0
§ 8.4. ЗАКОН ГУКА. ФИЗИЧЕСКИЕ УРАВНЕНИЯ
Для любой стержневой системы можно составить статические
(8.40) и геометрические (8.41) уравнения. В случае системы
с жесткими узлами первая система содержит 3n уравнений, а вто­
рая 3m (n — число узлов, m — число стержней), полное число урав­
326
w
нений равно 3 (n + m). В эти уравнения в качестве неизвестных вхо~>
~>
—
►
дят векторы S(3ra), Z(3ri) и A(3m); полное количество неизвестныхсоставляетЗ(п + 2 т). Таким образом, количество неизвестных
превышает число уравнений. Д ля решения задачи необходимо
построить еще Зга уравнений.
Запишем закон Гука для /-ro стержня. В случае действия
продольной силы имеем
Ni l f
А1У= ~ ж ~ •
(8-42>
Рассмотрим случай действия моментов М и/- и M KJ- (рис. 8.10,a).
Используя метод Мора, определим Афну- и Лфк/. Построим гру­
зовую (рис. 8 . 1 0 , 6 ) и единичные эпюры (рис. 8 . 1 0 ,в ,г ) и пере­
множим их между собой, воспользовавшись формулой Симпсонаг
д ф н / = ё щ т ( м я] • 1 + 4 - н-7 * М к / . 1 + о • м и/) = .
= 3EJ/ M »/ + M7J ^ KJ;
I/ f
л^н f Ч~ Мк t t
\
Av « j = m j \ M * / - ° + 4
2
* Y + * s ' 1) ^
= 6E7JM »/ + m 7 J M « f
(8.43)
(8.44)
Перепишем зависимости (8.43) и (8.44) в матричной форме:
tj= b fy ,
(8.45)
где
Al j
А ,=
Афнj
АФкj
JL
0
0
0
h
3E J ,
h6E J ,
0
h
bEJj
Ч
EFj
.
*/ =
^»1
3E J ,
’
ty
~¥
С -SJ ~~ М н/
_М к'_
327
В случае, если стержень имеет по концам шарниры, то
b
&,= EF
Аналогично, если стержень имеет один шарнир (либоЛ4ну =
либо M^j = 0 ), то
1J
0
EJj
bj =
0
0,
h
3EJj _j
Соотношение (8.45) справедливо для одного стержня. Придавая
индексу / значение / = 1 , 2, . . . , m, получим соотношение Гука
для всей стержневой системы. В матричнойформезаконГукадля
всей стержневой системы имеет вид
Д = BS,
(8.46)
77
где векторы А и S приведены в табл. 8.4, а матрица В имеет
квазидиагональную структуру:
El.
B=
(8.47)
Ль m
Здесь блоки bj [см. выражение (8.45)].
§ 8.5. СИСТЕМА УРАВНЕНИЙ СТРОИТЕЛЬНОЙ МЕХАНИКИ.
СМЕШАННЫЙ МЕТОД
Выпишем полную систему уравнений строительной механики
AS + P = 0,
A JZ + Д - 0 , >
(8.48)
B S ^ - A ' = Д.
При написании этой системы в физических уравнениях добав­
лено слагаемое Д'— вектор заданных деформаций, которые могут
возникнуть за счет действия температуры, неточности изготовления
стержней и т. д. Система (8.48) является полной системой и содержит
число уравнений, равное число неизвестных.
Любая стержневая система должна удовлетворять условию
прочности и жесткости. Для проверки прочности необходимо уметь
определять усилия, а для проверки жесткости — перемещения.
—^
—у
Таким образом, в системе (8.48) неизвестными являются S и Z;
^
вектор Д при решении практических задач, как правило, не тре­
буется. Исключим этот вектор из системы (8.48), для чего третье
328
у р авн ен и е
подставим во второе.
AS + P =
Т огда
0,
A rZ + BS + A' = 0
или
K + ^ z + д = » .}
AS
+P=
0 .J
Система уравнений (8.49) является системой уравнений сме­
шанного метода (в качестве неизвестных в эту систему входят как
—
^
~>
усилия S, так и перемещения Z). Первое матричное уравнение яв­
ляется уравнением совместности, а второе — уравнением равно­
весия.
Для получения системы уравнений (8.49) необходимо построить
*-^
две матрицы А и В. Векторы P и A' являются заданными. Если
—
>
—
>
Я^О , a A '= 0 , загружение будем называть силовым, в противном
случае — деформационным. Для построения матрицы Л необхо­
димо составить уравнения равновесия узлов, а для получения мат­
рицы В — построить матрицы bj для каждого стержня (8.45) и
далее поставить эти блоки по главной диагонали матрицы В в соот­
ветствии с нумерацией стержней (8.47). Этот процесс является об­
щим и не зависит от вида стержневой системы. Это обстоятельство
является очень важным, так как оно позволяет составлять универ­
сальную программу для ЭВМ.
Выше рассмотрены плоские стержневые системы, но совершенно
аналогично можно проводить расчет и пространственных стержне­
вых систем, конечно выкладки при этом получаются более гро­
моздкими.
Как указывалось в § 8.2, в случае статически определимой систе­
мы матрица А является квадратной, det A=^=0 и уравнения равно­
весия могут быть решены независимо от уравнений совместности,
т. e. система уравнений (8.49) распадается на две системы. Решая
систему уравнений равновесия, получим
*_>
З ^ — Л Г 1? .
(8.50)
Подставляя (8.50) в уравнения совместности деформаций, будем
иметь
- B A - ' P + A * Z + A' = Q.
(8.51)
—
v
Решая систему (8.51) относительно Z, получим
Z = (Л _1)т B A - * P - ( A - 1)* A'.
(8.52)
Из формул (8.50) и (8.52) следует, что при деформационном
загружении (температура, неточность изготовления стержней)
329
в статически определимых системах усилий не возникает, а возни^^
кают только перемещения. Действительно, при Я = Овсоответст—
^
вии с формулой (8.50) S = 0, аперемещенияопределяютсяпоформуле
Z = -(A -'y A '.
(8.53)
Рассмотрим статически определимую стержневую систему, изо­
браженную на рис. 8.1, а. Матрицы А и В для этой системы
имеют вид
—co sa '
А=
, 5=
— sin a
■
Обратная матрица к матрице А будет
—1
0
А ' 1=
1
sm
а
^
r J i_
EFi
— sin a
cosa
0
— 1
h
EFi
c tg a
— 1
1
-----:
sm а
0
Подставляя (8.54) в (8.50) и (8.52), получим
— 1
c tg a
^x
-N ,Px'
1
S=
—Л
0 —
.N ,.
sin a~j . P y .
—1
0
't T
Z=
' * c t g a -----: 1
У_
О
С| a,
sin
—
EFi
^¥
1
0
0
— Px
1г
—р
0
_
(8.54)
~ Ь ^ г с^ ё а
1
sin a
+ P ^ c tg a '
1
sm a
д;
д:
c О
t g a -----:
Cl
или
к
v = A < ~ p * ct§ “ + * V t g 2* ) +wi р у ж
- A^ c{g a + Л * ^ r >
где Рх , Р у — заданные составляющие внешней нагрузки, направ­
ленные вдоль осей X и Y\ A^, Д2— заданные деформации стерж­
ней 1 и 2.
В случае статически неопределимой системы уравнения совмест­
ности и уравнения равновесия являются связанными системами.
Систему (8.49) можно записать в виде
+
где
C=
330
в
А
Я-
А'
=
0,
(8.55)
матрица системы уравнении смешанного метода,
w
Для примера рассмотрим ферму, изображенную нарис. 8 .2 ,a .
Примем / = 4 a , h = 3a. Тогда длины стержней будут:
/i = /s = 4 a ,/a =
/ 4=
3
4
3a, 4 = /,3= 5 a ,s i n a = ^- = 0,6, cosa = ^ = 0,8.
Примем жесткости стержней пропорциональными их длинам:
EFX= EFS= iEF, EF, = EFt = 3EF, E F ,= E F ,= 5 E F (рис. 8 . 1 1 ).
Матрица А приведена в табл.
и co sa = 0 ,8 , получим
— 1
0
А =
0
0
0
0
1
0
0
0
0
— 1
0
— 1
0
Матрица В, соответствую­
щая стержням фермы, изоб­
раженной на рис. 8 . 1 1 :
8 .1 .
Подставляя sin a =
0 —0 , 8
0 0, 8
0
0
— 1—0,6
0
0
0,6
0
0
0
.
(8.56)
—0 , 8
—0 , 6
Pn j \\ 2Р BF,*tEF
1
1
a
B= W
1
1
1
1
(8.57)
Рис. 8.11
В верхней части (1— 1 1 -я
строки) табл. 8.5 приведена
исходная матрица С смешанногометода, построенная с использовани­
ем матриц i4(8.56)H B ( 8.57). Для решения системы линейных урав­
нений воспользуемся методом Гаусса. В нижних строках (1 — 11)
табл. 8.5 приведен прямой ход по Гауссу. Проводя обратный ход
и учитывая множитель ^ - (8.57) и силу P, получим
FF
— 1,099 4 r ^4 + 0,786P = 0,
а
отсюда
Ра а
V ,= 0,715 EF ’
—0,882 — U, — 0,48 • 0,715P + 0,393P = 0,
Ctотсюда
Ра л
UA= 0,056 T F ;
EF
_ 1 , 1 5 7 C-t V . + 0,211-0,056P -1,789P= = 0,
331
0со5
T а б л и ц а 8.5
to
-*
5
Номера
уравнении
^
z
P
Л',
1
,V-
Л*з
Л/|
Л-1.
1
X
—0 , 8
0 ,8
—
—0
1
1
9
—1
11
—
0
1
1
0
—0 , 6
—0 , 8
0,4
—0,4
—0 , 6
,8
—U 8
0 ,8
1
—0 , 6
— 2
—1
10
1
1
1
8
—0 , 8
—0 , 6
1
___ \__
1
—
1
- 1
0
___ \_
3
4
5
1
___
1
1
—0 , 8
0 ,8
1
—\
1
—1
9
—1
10
—I
—1
—
6
8
2 ,8
—3,6
—1,8
—0 , 6
0
___ \_
2
11
—
—
6
7
0
—
1
2
v,
f/+
1
3
4
5
1
У,:
v*
—1
1
2
7
V-2
Л;а
—0 , 6
—0 , 8
— 1,64
0,64
0 ,8
—0,39
— 1,390
0,293
—0 , 2 1 1
— 1,157
—0,182
—0 , 6
0,293
-•0,8
—0 , 6
—0,719
1
0
1
-
0 ,8
0,4
—0,4
— 1,48
—0 , 6
—0,48
1
1
0,211
—0,882
—0,48
0,544 , — 1, 099
0,903
— 1,789
—2,735
0,393
0,786
—0,968
—0,313
отсюда
n = - l,5 3 6 ^ ;
—1,390 —сь U , - 0,293 • 1,536P + 0,056P + P =
0,
отсюда
t / , = 0 ,4 3 6 ^ - ;
_0,64 — U2 + 0,64 •0,436P + 0,48 • 1,536P = 0,
СЬ
отсюда
Ut = 0 , 6 2 0 ^ ;
_JL ЛГв_ o ,8 •0,056 ^
-
0,6
•0,715 — =
0,
отсюда
N e = 0,474P;
^ r N 5 - 0,8. 0,620 ^ - +
0,8
•0,436 ^ - +
0,6
• 1,536 ^ - =
0,
отсюда
N b= —0,774P;
^ y V a + l ,5 3 6 ^ ^ =
EF
0,
отсюда Л^4 = —1,536Р;
._
_ л/ + 0 , 4 3 6 ^ — 0 ,0 5 6 ^ - = 0, отсюда N 3 = — Q,38P;
^гЛ^з
EF
— W2 — 0 ,7 1 5 ^ ^ = 0, отсюда jVa = 0,715P;
~EF
а
^ r W i — 0 ,6 2 0 ^ - =
~EF
0,
отсюда A^ = 0,620P.
§ 8.6. МЕТОД ПЕРЕМЕЩЕНИЙ
Для уменьшения числа неизвестных исключим из системы
—>
(8.49) вектор S. Решая первое уравнение системы (8.49) относи—
>
тельно S, получим
S = - B - ' A ' Z — B - 1! ' .
(8.58)
Подставляя (8.58) во второе уравнение системы (8.49) и изме­
няя знаки на противоположные, получим систему уравнений
метода перемещений
A B - ' A ' Z + A B - ' b ' - P = 0.
(8.59)
Ввиду квазидиагональной структуры матрицы В матрица В ~ 1
будет также квазидиагональной, причем блоки В _ 1 будут обратны
блокам матрицы В . При этом каждый блок относится к одному
333
стержню. Д ля блоков матрицы В~1 можно записать готовые фор­
мулы.
1 . Оба узла, к которым примыкает стержень, жесткие:
EFj
bf =
о
0
~ч
0
4EJ /
2EJj
h
h'
2EJj
(8.60)
4EJf
0
2
"1
~Ч~-
. Один из узлов шарнирный:
- EF
0
Ч
(8.61)
3E J ,
—
J
0
3. Оба узла шарнирные:
EF,
(8.62)
Таким образом, процесс обращения матрицы В осуществляется
—
>
просто. Из системы (8.59) находится вектор перемещений Z. При
этом число уравнений определяется числом узлов (при жестких
узлах число уравнений равно 3n, при шарнирных — 2 л, где n —
число узлов). Таким образом, число уравнений резко сокращается
по сравнению со смешанным метоДом. После того как найдены пере*
—
^
—
>
мещения Z, по формуле (8.58) находят усилия S.
Применение метода перемещений продемонстрируем на примере
рамы, изображенной на рис. 8.5, а. Уравнение равновесия для этой
рамы имеет вид
A S + P = 0,
(8.63)
~>
где матрица А и вектор P приведены в табл. 8.3. В соответст­
вии с принципом двойственности
A TZ
'0
1
0
0
0"I
0
0
0
0
Г ”
0- ^ 1
__ 1
0
о
За
0
J_
Aa
—
Д=
334
(8.64)
A = 0,
о
0
0
0
L0
0
_3_
5
4
25а
___ 4_
25а
J_
За
___ 4
5
3
25а
___ 3_
25а
0 ru ,n
Vx
—1
U,
0
1
0
у2
JP i _
(8.65)
В рамах деформации за счет продольной силы N во много раз
меньше деформации от М у поэтому обычно ими пренебрегают
(стержни рамы считают нерастяжимыми и несжимаемыми): .
A/, =
0,
Л/ 2 =
0,
Д/ 8 =
(8.66)
0.
Подставляя (8 .6 6 ) в (8.65) и раскрывая выражения для А/*,
Д/2, А/3, получим:
(8.67)
Таким образом, пять перемещений связаны междусобойтремя
зависимостями (8.67). Запишем зависимости (8.67) в матричной
форме
[U il
0
~ 0 1
0 1 ^_
1
0
— 1
0
- 0.
(8 . 68)
0
—3/5
4/5
0
^ 2
-1 -V2 ^Решим однородную систему уравнений (8 .6 8 ) (см § 13.5). Пер­
вый диагональный элемент равен нулю, поэтому произведем пере­
становку уравнений (табл. 8 .6 ).
T а б л и ц а 8.6
Номера
уравнений
2
I
3
Ut
О*
Vt
—1
У3
1
1
—3/5
4/5
Матрица системы имеет верхнетреугольную форму. Проведем
обратный ход по Гауссу (см. § 13.4):
l*^i^O *K i^-l*t/g^-O *V a — 0 ,
l-V i + 0 .tf, + 0 . ^ = 0 ,
- l u , + l v , = 0.
(8.69)
Отсюда
V, = i v , , v, = o, U, = i v , ,
или в матричной форме
г^г
Vt
^.
'4 /3 —
0
4/3
V,.
(8.70)
335
Запиш ем вектор Z , и сп о л ь зу я зависим ость (8.70):
^
z=
_4
3
0
T"
з
1
0
'U,
Vi
U,
'/2
|_ф2 _
0
0
0
0
1
vv
= L Z i.
L Ф2 .
(8.71)
--r
При A' = 0 система уравнений метода перемещений имеет вид
A B - * A ' Z - P = 0.
(8.72)
Примем (см. рис. 8.5, a) EF1= EF2= EF3^ E F i E J 1= E J 2 =
= E J Z= EJ, тогда матрица В~х будет
EF
4а
0
0
3EJ
4a
В 1=
EF
3а
0
EJ_
а
0
(8.73)
EF
5а
0
0
0
0
4£7
5a
2EJ
5а
2EJ
Ъа
4 EJ
Ъа
Подставляя (8.71) в (8.72) и умножая обе части полученного
равенства на L T, получим
^ TL)Tf i- M TLzT—L TP =
A TL =
0
— 1
J_
4a
0
т~
0~ ~ 1
о
____ l_
3а
о
0
0
0
0
0
0
0
0
J
5
4
25а
___ 4_
25а
0
0
0'
0
0
j_
0
За
__4_
5
3
25а
3
25а
—
0;
1
0
1
4_
3
0
1
0
0
1
0
(8.75)
336
Обратим внимание на то, что в матрице A JL в первой, третьей
и пятой строках стоят нули, получилось это в силу несжимаемости
стержней. Далее, при вычислении произведения B~~1A TL коэффи­
циенты, зависящие от площади, будут умножаться на нули и
площади выпадут из матрицы R 1— (A TL)TB ~ 1A TL\
_ J_ *
83
180a3 l5a2
Ri = ( A 'L ) 'B - * A 'L = EJ
1
_9
5a -j
-. 15a2
f
EJ
0 ’, 4 6 1 аl 3i
0,0667
Дг
’
а2
0,06674т
’
а2
R i 1-
EJ
1,8
2,1804а3
— 0,0808а?
(8.76)
—
а
0,0808а2]
0,5585а Г
-^-
Вычислим вектор Zx:
2,1804а3
0,0808а?
v2
41:1
%
т [
где
p
L TP =
1,3333
0
0 1,3333
0
0
0
1
т
0
1
0
1
,3333
а
Р. (8.78)
0
Ра
Подставляя (8.78) в (8.77), получим
‘ 2,1804а3 — 0,0808а2" 1,3333 _р_ = Г2,8263а3" P
Zr = .- 0 ,0 8 0 8 a 2
E J ~~ Lo,4508a2. ~EJ
а
0,5585a .
(8.79)
__v
Подставляя (8.79) в (8.71), получим
ri,3333 on
гиГ
0
0
v*_
2,8263а3
Z = и . “ 1,3333 ~ 0
0,4508а2
1
0
v;
0
1_
LФ■2 _
'3,7683а3'
0
P
EJ
EJ
3,7683а3
2,8263а3
ь 0,4508а2_
(8.80)
При A' = 0 уравнение для определения усилий (8.58) имеет вид
S= -B
A%
337
-
или
h \
-
м „,
N 2
^
s =
=
^K 2
^
7
М я9
_ ^K 3
EF
0
4а
3 EJ
16 a2
0
EF
3а
0
*
0
о
0
0
0 "
0
0
0
0
0
0
3a2
о
0
3а
EJ
0
0
EF
0
_
3 EF
25 a
24 E J
125 a2
24 E J
125 a2
EJ
EJ
За2
а
4 EF
25 а
i i
125
18
125
0
'3,7683a3'
0
3,7683a3
2,8263a3
0,4508a2
_P_
EJ
4E J
5a
2E J
5a _
E L
a2
EJ
а2
= [0 —0,7065Pa||0 — 0,4913P af0 - l,4 9 1 1 P a l,3108Pa]T. (8.81)
На рис. 8 .1 2 ,a изображена эпюра моментов,соответствующая
выражению (8.81), на рис. 8 . 1 2 , б — вырезанный узел, и показано
его равновесие. Нормальные силы в выражении (8.81) получились
равными нулю вследствие принятой несжимаемости и нерастяжимости стержней. Для определения этих нормальных сил необхо­
димо использовать уравнения равновесия для узлов 1 и 2 (см.
рис. 8.5, e, г).
У зел 1
2
* =
0,
^ l + ^ + P=
0;
м.
Узел
2
(8.82)
2
*=o,
_лг2 +
м и;
4 лгз+п 4
5 " 3 1 25a ' " HJ
25а
Подставляя в (8.82) значения моментов по выражению (8.81),
получим:
____ 0,70S5Pa
K = - P +
N1=
0,4913Pa
3а
4а
= — 0,8234P;
0,1638P;
N s = j ( - M 2 3 4 P + ^ .l ,4 9 1 1 P a + g j U l,3 l0 8 P a j = — 0,6245P.
338
Рассмотрим процесс построения линий влияния на примере
фермы, изображенной на рис. 8.13, а. При построении линий влия­
ния вкачестве нагрузки необходимо принять не вектор P, а матрицу
P . Число столбцов матрицы P равно числу загружений, которое
равно числу узлов ездового пояса. В каждом столбце будет стоять
по одной единице в строках, соответствующих узлам ездовогопояса
на месте вертикальных составляющих сил, приложенных кузлам
ездового пояса. Матрица А
М-Рй
(iVi, . . . , N 19) и матрица
i,WPa s)
P для фермы, изображен­
^Pz
ной на рис. 8.13, а, при­
ведены в табл. 8.7.
ti,Wa X)l,WPa
Матрица В имеет вид
с~^
B = T F 'B ’
(8.83)
где В —диагональная мат­
Рис. 8.12
рица размером 19x19, на
главной диагонали которой
стоят длины стержней /, = 5, / 2 = 6 , / 3 = 5 , / 4 = 6 ,
/ 7 = 5, lg = б, / 9 = 5, /io = 6 , / }i — 5, / | 2 ~ б , / i 3 - 5 ,
— 5, ^iB = 6 , /17 = 5 , / 18 = 6 , / i g - 5 .
^
^ W 4 W ^ (/2) 8 (16) 10
У/М
,Г7Л
r/j^ №W/
Г/Л
=/
g^ в ^. L^ 5 ^^
f)
*w Шь
ш
0
^X e
ОДМ
o,sm
^5532^ ”
0,296$
О
QJ456
/ 5 = 5, / 6 = 6 ,
/14 = б, /15 =
_ ___
o,m5
Л.б.Мс
nAM*
0,3106_____
лАМс
o9o m ^
Q,5Q1$^s ^ ^
Рис. 8.13
~>
В соответствии с (8.59) при A' = 0
^ A B -> A 'Z -P = 0 ,
(8.84)
Z = (A B -'A ')-'E F .p .
(8.85)
откуда
Подставляя (8.85) в (8.58) при A' =
0,
получим
T а б л и ц а 8.7
3
4
5
6
7
8
9
10
11
yv2
N
з
0 ,6
— 0 ,8
-0 ,6
— 0 ,8
—1
Л\
^5
*«
*,
N,
л^
JVio
N n
^v,,
JVi,
N
14
JVt.
N u
*17
JVi,
*„
P
|
1
0 ,6
0 ,8
— 1 — 0 ,6
— 0 ,8
1
—1
0 ,6
— 0 ,8
1
— 1 — 0 ,6
0 ,8
0 ,6
0 ,8
—1
I I
о о
00 О
2
Ni
I
о о I
00 О
Номера
узлов
1
—1
0 ,6
— 0 ,8
1
— 1 — 0 ,6
0 ,6
—1
—0 ,6
-0 ,8
1
0 ,6
-0 ,8
— 1 —0 ,6
0 ,8
1
0 ,6
0 ,8
— 1 -0 ,6
-0 ,8
1
—1
0 ,6
—0 ,8
— 1 —0 ,6
Процесс вычисления произведения (AB-'A*)-'P осуществляется
без использования обратной матрицы, путем решения системы ли­
нейных уравнений с матрицей свободных членов P по Гауссу.
Матрица 5 приведена в табл. 8 .8 . Строками этой матрицы яв­
ляются ординаты линий влияния соответственно в узлах 3 , 5 , 9 .
На рис. 8.13, б приведены три характерные линии влияния, орди­
наты которых взяты из табл. 8 .8 .
Т а б л и ц а 8.8
Nt
N2
N»
N4
Nb
N*
N7
N*
*o
* 10
Nn
Ni*
N13
Nu
A7i,
*ie
Nl7
^i*
Nl0
0,7485
0,4491
0,7485
-0,8983
0,5014
0,5974
-0,5014
-0,2965
0,5014
-0,0043
-0,5014
0,3052
-0,1272
-0,2289
0,1272
0,1526
-0,1272
-0,0763
0,1272
—0,3106
0,1864
0,3106
—0,3728
—0,3106
0,5592
0,3106
—0,7456
0,9393
0,1819
—0,9393
0,3817
—0 , 1590
—0,2862
0,1590
0,1908
—0,1590
—0,0954
0,1590
0,0477
—0,0286
—0,0477
0,0572
0,0477
—0,0859
•—0,0477
0,1145
0,0477
—0,1431
—0,0477
0,1717
—0,6965
0,2462
0 , 6565
—0,6641
0,5534
0,3321
—0,5534
§ 8.7. МЕТОД СИЛ
Рассмотрим метод, в котором в качестве неизвестных прини­
маются усилия в стержнях. В случае статически неопределимой
системы матрица А [см. (8.49)] является прямоугольной с размера­
ми 3nx3rn (где n — число узлов, m — число стержней, при усло­
вии, что все узлы жесткие). При этом число ее строк (3n) всегда
меньше числа ее столбцов (3m), так как в противном случае система
либо статически определима (3n=3m), либо изменяема. Перенуме­
руем неизвестные таким образом, чтобы определитель из 3n первых
столбцов был бы не равен нулю. Это всегда возможно, так как ранг
матрицы уравнений равновесия равен числу ее строк. Матрицу,
соответствующую этим 3n первым столбцам, обозначим А 0, остав­
шуюся часть обозначим А х :
3ti 3tn — 3n
A = 3n
(8.87)
341
В соответствии с разбивкой матрицы А уравнения равновесия
схематически можно представить в виде [см. (8.49)]
3 n 3(m — n)
3/i = 0.
(8 .8 8 )
3 (tn— n)
Разбивка матрицы А на две матрицы (А0 и А х ) эквивалентна
выбору основной системы. При этом усилия X играют роль лиш­
них неизвестных. Неравенство det<40=^=0 гарантирует неизменяе­
мость основной системы. Переставляя столбцы матрицы А таким
образом, чтобы det^o=^= 0 , можно получать различные основные
системы. В соответствии с разбивкой матрицы А первое уравне­
ние системы (8.49) (уравнениё совместности) можно представить
в виде
B<
= 0.
(8.89)
В
При расчете фермы матрица В является диагональной и при
разбиении ее на блоки В 0 и В х побочные блоки будут нулевыми.
При расчете рам матрица В квазидиагональна и при ее разбиении
в углах побочных блоков могут появиться элементы, отличные or
нуля. Учет этих элементов принципиальных затруднений не вызы­
вает, однако последующие формулы становятся менее наглядными,
поэтому этот вариант приводить не будем. Перепишем зависи­
мости (8 . 8 8 ), (8.89) в виде
^о^о + ^ Я ^ + Р =
0»
B A + i4 JZ + A ; = 0,
BxX + A \ Z + A x = 0 .
j
1
J
(8.90)
Таким образом, общая система уравнений строительной меха­
ники представлена в виде трех групп уравнений. При этом
—>
->
d e t A o=^=0. Исключим из системы (8.90) векторы S Q и Z, Решаем
~^
первое уравнение относительно S0:
S ' = * - A ; 4 A x X + P) = L x X + Su,,
(8.91)
L% — — Ao гАх',
(8.92)
где
A z'P .
(8.93)
Формулы (8.92) и (8.93) выражают соответственно усилия в стерж­
нях основной системы от единичных лишних неизвестных (первый
342
столбец от Xj = l, второй—от Х 2 = 1 и т. д.) и от нагрузки,
—>
характеризуемой вектором Р.
^
Процесс получения матрицы L x (8.92) и вектора S QP (8.93)
осуществляется с использованием метода Гаусса. При этомвпроцессе прямого хода при перестановке столбцов автоматически
выбирается основная система (выделяется вектор зависимых неиз—>■
вестных S0) и далее в процессе обратного хода получаются выра—^
жения для матрицы L x и вектора S op.
^
Решаем второе уравнение системы (8.90) относительно Z:
Z = — C^o *)T(B0S Q4 - Д0).
(8.94)
Подставляя (8.91) в (8.94), получим
Z = — (Л”о)т (B0Lx X 4 - B 0S QP+ А0).
(8.95)
Подставляя (8.95) в последнее уравнение системы (8.90), получим
(Bx 4 - L x B 0L x ) X + L J # 0S0P 4 - L \ Дэ + А х = 0.
(8.96)
В качестве примера рассмотрим ферму, изображенную на
рис. 8.11. Матрица уравнений равновесия и грузовой столбец
приведены в табл. 8.9 ( s in a = 0 ,6 и co sa = 0,8).
T а б л иц а 8.9
Номера
уравненнй
Nt
1
2
3
4
5
—1
Л'2
Ns
N.
*5
-1
—0,8
0,8
—0,6
1
-
—1
—1
tf.
—0,8
—0,6
P
1
—2
1
Представим уравнения равновесия так, чтобы на главной диаго­
нали стояли'элементы, отличные от нуля, и проведем прямой ход
по Гауссу (табл. 8.10).
Выпишем систему после прямого хода по Гауссу:
-N ±
-N %
Л^з
- 0 , 8 N,
=0,
- 0 , 6 N, + P = 0,
+ 0 ,8 N ,
+ P = 0,
-N ,-0 fiN ,
— 2P = 0,
0 ,8 N 5 — 0 ,8 Ne + P = 0 .
Проводя обратный ход по Гауссу, получим
0,8iV5 = 0,8Ne—Я,
T а б л и ц а 8.10
Номера
урпвнений
л\
1
5
2
3
4
—1
1
—1
Л'з
^2
^
JVe .
N>
—0,8
—0,6
—1
0,8
—0,6
1
—1
—1
5
,
P
1
1
—2
—0,8
—0,6
—I
—1
—0,6
1
2,8
—0,6
—2
—3,6
—0,8
0,8
—1
4
1
0,8
1
3
- 1 ,8
—0,6
2,8
- 3 ,6
— 1,8
—1,8
—0,8
2
2
1
1
откуда
tf, =
N, =
N 3=
W2 =
yvt =
J V ,- l,2 5 P ,
— 0,6 (Nt - 1,2 5 P ) - 2 P = - 0,6N, — 1,25P,
- 0,8 ( t f . - 1,2 5 P ) - P = - 0,8N e,
— 0,6We + P,
- 0 , 8 (N6- 1,25P) = - 0 ,8 N e + P,
или в матричной форме
pvr
Nt
N3
N4
Ltf.J
t
=
!
-
— 0 ,8 "
Г 1
1
1
—0 , 6
0
—0 ,8 N , +
—
1,25
—0 , 6
- — l,25-J
1 -
В соответствии с формулой (8.91)
— 0 ,8 “
—0 , 6
—0 , 8 ;
—0 , 6
_
1
_
"
-^
S 0p =
1
1
0
п
— 1,25
L— l,2 5 j
Подставляя L x и $ ер в (8.96) при Ao = 0 и A^ = 0, а также учи­
тывая (8.57) (В 0— единичная матрица 5-го порядка, Вх = 1) и
344
r
вйодя обозначение Ne= X , получим
а
EF
1
+ [—0 , 8
^ [ —0 , 8
EF
—0 , 6
—0 , 6
—0,8
—0 , 8
—0 , 6
-
0,6
P = о,
1 ].
откуда
4 X - l,9 P = 0 ; X -0 ,4 7 5 P,
По формуле (8.91) получим усилия в стержнях основной сис­
темы:
— 0 ,8 i
W,
Г 1 ' Г 0,62 1
0,715
Nn
—0 , 6
= —0,38 Р.
М.
— 0 , 8 -0,475P +
0
—0 , 6
— 1,25
—1,535
N
- —0,775J
L 1 J
L - l,2 5 J
LN.
Усилия, полученные с использованием метода сил, совпадают
с аналогичными усилиями, полученными по смешанному методу
(см. §8.5).
§ 8.8. УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
И ИХ СВЯЗЬ С УРАВНЕНИЯМИ СТРОИТЕЛЬНОЙ МЕХАНИКИ
Покажем, что уравнения теории упругости можно записать в
форме, аналогичной записи уравнений строительной механики.
Рассмотрим случай плоской задачи; случай пространственной за­
дачи в принципе аналогичен и отличается только количеством урав­
нений.
С о с т а в л e н и e у p а в н e н и й p а в н о в e с и я, с т aт и ч e с к и e у p а в н e н и я. На рис. 8.14, а изображена пласц
d°У+ ^дд- -dy
dij
*~
dx I
<*9
ir ^X 1'
Y
d* + ж ~ йк
^4 ,л
^ —d,к ■*»
Рис. 8.14
345
тинка толщиной б, находящаяся в условиях плоской задачи. Вы­
делим из пластинки двумя сечениями, параллельными координат­
ным осям X и Y, бесконечно малый элемент с размерами dx, dy.
На рис. 8.14, б этот же элемент изображен в более крупном масшта­
бе. По граням элемента действуют нормальные и касательные на­
пряжения.
Для напряжений примем следующие обозначения и правила
знаков: нормальные напряжения обозначим о и за положительные
напряжения примем растягивающие напряжения (направленные
от граней элемента). Касательные напряжения обозначим буквой т,
снабженной двумя индексами, первый из которых указывает на­
правление напряжения, а второй — направление внешней нормали
к площадке, по которой действует это напряжение (направление
внешней нормали совпадает с положительным нормальным напря­
жением). Если направление нормали совпадает с направлением
соответствующей оси, то такая нормаль будет положительной,
в противном случае — отрицательной. Касательные напряжения,
действующие по площадкам с положительными нормалями и на­
правленные вдоль положительных осей, будем считать положитель­
ными и наоборот.
Для площадок с отрицательными нормалями положительные
касательные напряжения направлены против положительных на­
правлений осей. На рис. 8.14, б показаны положительные направле­
ния напряжений. Площадки, расположенные ближе к началу коор­
динат, будем называть исходными площадками. Очевидно, что ис­
ходные площадки имеют отрицательные нормали. По исходным
площадкам действуют напряжения ох, тХ(/, аг/, т х, которые в соот­
ветствии с принятым выше правилом знаков направлены против
положительных направлений соответствующих осей. По противо­
положным площадкам к этим напряжениям прибавятся прираще­
ния, которые по малости заменяются частными дифференциалами
вдоль соответствующих осей. Составим уравнения равновесия для
элемента, изображенного на рис. 8.14, б:
2 *= o,
— 0*6 dz/
т хц8 c k + ( a * + ^ d x ) 6dy +
+ ( v + % ^ d;t) Sd^ + ySdA:d^ = 0 ;
346
(8 -98)
Нормальные напряжения момента не дают, так как их равно­
действующая проходит через точку, относительно которой берется
сумма моментов (центр тяжести). Приводя подобные члены в урав­
нениях (8.97)—(8.99), деля на 8 d x d y и пренебрегая малыми в
уравнении (8.99), получим
двх
д
| дтху
х
д
у
'
к
(8 . 100)
( 8 . 101 )
Система дифференциальных уравнений (8.100) с учетом (8.101)
содержит три неизвестных а х, а , т и носит название уравнений
Навье. Подставляя (8.101) в (8.100), получим два уравнения равно­
весия с тремя неизвестными, следовательно, задача теории упру­
гости является статичес­
“- § * /
ки неопределимой й для
ее] решения необходимо
привлекать геометричес­
кие уравнения.
Уравнения (8.100) и
(8 . 1 0 1 ) можно символи­
чески записать в виде
Ao + P = 0,
(8.102)
где
д_
4дх
A=
0
д_
ду
^
о=
~ах~
аи
т
,
^-
p=
d'
£
ду
д_
дх.
X'
Y _
Рис. 8.15
*
При этом выражение Ao следует понимать как условную опера­
цию умножения матрицы на вектор. Обратим внимание на то,
~^
что Ao есть единое выражение, где А — оператор дифференциро­
вания, который имеет смысл только в совокупности с вектором о.
—
^
Поэтому нельзя записать (Лсг)т = а тЛ г, так как правая часть этого
равенства не имеет смысла.
Г е о м е т р и ч е с к и е у р а в н е н и я . На рис. 8.15 показан
элемент с размерами dx dу до деформации (пунктирными линиями)
и положения его ребер OA и ОБпоследеформации ( 0 'A " u 0 'B " ) .
При деформации пластинки точка О перемещается п о о с и Х н а и,
а по оси Y на v , в результате чего займет положение О'. Пере­
местим ребра 0 A и OB поступательно, в результате чего точка А
347
переместится в точку Л \ а точка В — в B'. Точка А ” имеетотносительные перемещения (по отношению к точке O'), равные ^ d * ;
^ dx (точка А отличается от точки 0 координатои X , следова­
тельно, необходимо учитывать дифференциалы вдоль X). Анало­
гично, точка В" имеет относительные перемещения — dу\ “ dy.
Таким образом, в результате деформации ребра исходного эле­
мента удлиняются и поворачиваются; ребро OA — на угол уху,
а ребро OB — на угол уух. Вычислим относительные удлинения
ребер ех, гу и искажение прямого угла у = у + у
В соответствии с рис. 8.15 имеем:
e . _ ! ди
( ^j : Аd л, = ди
-
, ^ d( dv
, ) л: d^ л, =
dv
;
\
1
^
T-T,, +v - (s ^ ) =d*+(35^) =^ = 3S+S' J
Равенства (8.103) носят название уравнений Коши и в симво­
лической форме их можно записать в виде
e - л тг ,
^
г д е е = [е* еу ]т; Z = [и , у]т; Л т— дифференциальный оператор,
транспонированный к оператору дифференциальных уравнений
равновесия (8 . 1 0 2 ).
Векторы a, e и Я, Z являются двойственными, и в теории упру­
гости, аналогично строительной механике (см. § 8.3), соблюдается
принцип двойственности. Особенностью является то, что в строи­
тельной механике А — матрица, автеорииупругости — матричный
дифференциальный оператор.
З а к о н Г у к а . Ф и з и ч е с к и е у р а в н е н и я . Для простоты
рассмотрим случай изотропной пластинки; в этом случае закон
Гука имеет вид
~~>
—У
— ¥■
~ ^
‘E
E
CTv-
У
8 У=
~Ё
т
,
,
(8.104)
^"zT + гУ'
.
/
V=G+^ =
2 ( 1 ~j~ ц ) Т
~Е
.
t
+ ? ’
где E —модуль упругости на растяжение (прн этом предполагается,
что материал на растяжение и сжатие работает одинаково); G =
f*
= j ^ l _ j _ ^ — модуль сдвига; ^i — коэффициентПуассона; e * , e ^ у ' —
заданные деформации, например деформации от температуры.
Запишем зависимости (8.104) в матричной форме
e = tfa + e',
348
(8.105)
r
где
—^
ТV
1
e=
2 (1
; or =
+ у)
I
'° х
°У
%
~ех'
; e' = «;
У .
Далее рассмотрим граничные условия, наложенные на пла­
стинку (см. рис. 8.14, а). Пластинка ограничена контуром S =
= S 1Jr S 2y который можно разбить на две части: Sj — где заданы
перемещения; S 2 — где заданы напряжения; вчастности, напряже­
ния могут быть равными нулю (контур не загружен).
Если на контуре заданы перемещения, то такие граничные
условия носят название кинематических граничных условий, если
заданы напpяжения— статичес­
ких граничных условий. Кине­
матические граничные условия
записываются в виде
ЪЛ Ь /n'
Z ^ Z Si при x, y e S , . (8.106)
Перемещения в точках контура Sj равны заданному векто-
^ X J^Jf^^^^^
x I^ ^ii
dy V
„
Y
*
z ^—
I ~*—
■Ц
РУ Zs±.
Рассмотрим далее случай ста­
^L:. dK
^
тических граничных условий.
J
На рис. 8.16показан бескоРнс. 8.16
нечно малый элемент, выделен­
ный у контура S2, Р хУ P , составляющие внешней нагрузки, приходя­
щиеся на единицу площади -или единицу д ли н ы кон турап ри 8 = 1
и направленные соответственно вдоль осей X и Y, n — внешняя
нормаль к контуру.
Спроецируем все силы на оси X и Y :
2 X = 0, Р хб ds—ox8 dу —тб dx — 0;
(8.107)
2 Y = 0, Р уб ds-—вуб d x— тб d y = 0 .
Деля уравнения (8.107) на dS и перенося оХ9 оуУ в правую
часть, получим
*y , dx
ds
P * = a * ds
(8.108)
dy_
n
d*
у ay”ds""
ds
В соответствии с рис. 8.16 ddsУ = cos a ~- 1— коси нус у гла между
dx
внешней нормалью rt и осью Х\ ds == sin а — cos f>= m — косинус
угла между внешней нормалью n и осью Y.
С учетом этих обозначений уравнения (8.108) будут иметьвид
Px = <*xl
р , =
+ Хт’
ацт + x1п: )
(8.109)
349
Соотношения (8.109) в матричной форме имеют вид
Ps2
^s^>
(8. 110)
%1 У £^2»
где
fPvl
X * Л _ 7 0
P у J > S*S — 0 m
m
1J
Обратим внимание на то, что матрица Л 5 имеет ту же струк­
туру, что и дифференциальный оператор А [см. выражение (8.102)]
при замене ^ на 1, а ~ на т.
Сформулируем задачу теории упругости для пластинки, зани­
мающей объем V, ограниченный контуром S = S ^ S g , где на части
контура 5j заданы кинематические граничные условия, а на части
S 2 — статические граничные условия. Требуется определить а и Z
для x, y ^ V .
Выпишем уравнения теории упругости
Aa + P = 0; '
A TZ — e = 0; ►
Ba + e* = e. >
(8 . 111)
—
>
Исключая из системы (8.111) e, получим
B a — A TZ + e' = 0; \
Г^’ y e v .
+ Я\ = г\
0; }
Aa
(8.112)
Кинематические граничные условия:
Z = ZSl, x, y ^ S i .
Статические граничные условия:
A sa = P s2, x, y £ S 2.
~>
~+
Здесь ZSl— вектор заданных перемещений на контуре Sx; P S2 —
вектор заданных усилий на контуре S2.
Таким образом, между уравнениями теории упругости(8.111),
(8.112) и уравнениями строительной механики (8.48), (8.49) имеется
полнейшая аналогия. Кинематическимграничнымусловиямвстроительной механике отвечают опорные узлы, а статическим— загру­
женные или свободные от закреплений узлы.
Матрица закона Гука является симметричной, неособенной мат­
рицей и имеет обратную матрицу:
г1
В - 1- ^ -
l-^ i2
*"И
2
350
(8.113)
^
Положим e' = 0 и выразим
а из перЕого уравнения системы (8 .112):
o = B -'A 'Z .
—
>■
*
Подставляя это значение о во второе уравнение системы (8.112),
получим
A B - W Z + P = 0.
(8.114)
Построим оператор А В ~ 1А Т:
^_a
A B - ' A ' ==
дх
0
<Г
!Г 1
E
ду
И'
д 1 -ц 2
о
дх~
0
д
ду
0 1 '1
H'
1
0
* — И"
0
0
2 J
L
ду
1— p, д2
дх2 '
2 ду2
д2
1+
2
jt а2
дх ду
1+ ц д2
2 дхду
д1 , 1 - ц д2
ду2. ”Г 0 дх - л
0
r
ду
1
дх
(8.115)
Подставляя (8.115) в (8.114), получим:
E ( д?и , 1— ц jPu_
1+ ц d2v \
x
0.
l - ( i * v a * ^ - 2 ду2 ^
2 д х д у )'
E
^1 + ц д2и j d*v
1— ц. дЪ \
у _ п
1— ц2 V 2 дхду ^ ду2 "*■ 2 dxi ) '
Деля оба уравнения на I. ^ —
fX^ , получим
д2и
1 — цд2и . 1 + ц d*v . 1 —ц2 у _л.
~дЖ ^~~2~д^ 1
d2^ ,
d^2 +
1—
2
2
дхду+
ц, d2^ . 1 + ц, дЧ .
дх*^~ 2 d*dy +
£
1 —ц2 у
”
_
’
(8.116)
^
£■
Уравнения (8.116) являются уравнениями равновесия в пере­
мещениях плоской задачи теории упругости для случая плоского
напряженного состояния.
Гла вa 9
РАСЧЕТ СТЕРЖНЕВЫХ СИСТЕМ
С ИСПОЛЬЗОВАНИЕМ ЭВМ
§ 9.1. ВВОДНЫЕ ЗАМЕЧАНИЯ
Попытки автоматизации расчета статически неопределимых
систем предпринимались еще до появления ЭВМ. В §8.7 приведена
матричная форма метода сил. Элементами матрицы L x (8.92) и век—
^
тора S 0p (8.93) являются ординаты единичных и грузовой эпюр
в характерных точках. Эти матрицы можно построить без примене­
ния формул (8.92), (8.93), а используя метод сечений. Тогда весь
дальнейший расчет по методу сил сводится к составлению системы
уравнений (8.96), ее решению и вычислению усилий по формуле
(8.91). При этом весь процесс расчета можно разделить на два этапа:
логический и механический (арифметический). Под л о г и ч eс к и м этапом понимается процесс выбора основной системы,
построение единичных и грузовых эпюр и составление исходных
матриц. Этот процесс должен выполняться квалифицированным
специалистом. M e x а н и ч e с к и й этап состоит в выполнении
матричных операций и может выполняться оператором, знакомым
только с операциями над матрицами. Разделение процесса расчета
на логический и механический резко повысило производительность
труда при расчете сложных статически неопределимых систем.
В настоящее время все более широкое распространение полу­
чили калькуляторы. Калькулятор построен по тому же принципу,
что и ЭВМ. Появляются калькуляторы с программным управлением
и с магнитными картами. Ведется успешная работа по подключению
калькулятора к обычному телевизору, с тем чтобы результаты счс-га
выдавать на экран телевизора. Таким образом, калькулятор превра­
щается в маленькую и широко доступную ЭВМ, содержащую tce
элементы больших ЭВМ и работающую по тому же принципу. По­
этому, прежде чем рассматривать расчетсложных стержневых систем
на ЭВМ, рассмотрим вопросы расчета стержневых систем с исполь­
зованием калькуляторов.
Изучение раздела курса «Расчет стержневых систем с исполь­
зованием ЭВМ» может быть эффективным только в том случае,
если студенты в процессе обучения составят простейший программ­
ный комплекс. До изучения курса строительной механики студенты
изучают курс «Алгоритмические языки и программированием.
Изучение программирования проводится на примерах. Хорошим
упражнением при составлении программ является составление
c52
программ линейной алгебры: сложения и перемножения матриц,
решения систем линейных уравнений поГауссу, программа обра­
щения матриц.
Таким образом, к началу изучения курса строительной механики
студенты понимают, как составляются программы линейной алгеб­
ры. При изучении строительной механики необходимо использо­
вать эти или более совершенные стандартные программы для расчета
стержневых систем. В главе описывается учебный программный
комплекс для расчета стержневых систем смешанным методом, ме­
тодом сил и методом перемещений. В заключение приведена укруп­
ненная блок-схема промышленного программного комплекса по
расчету стержневых систем и описана работа его блоков.
§ 9.2. ПОЛУАВТОМАТИЗИРОВАННЫЙ РАСЧЕТ СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ
КАЛЬКУЛЯТОРОВ
Прежде чем переходить к расчету стержневых систем на ЭВМ,
рекомендуется провести ряд расчетов с использованием калькуля­
торов. Любой калькулятор имеет либо запоминающий регистр,
либо ячейку памяти. Это позволяет производить перемножение
матриц без промежуточных записей (см. § 13.3).
В § 9.1 указывалось, что при использовании м e т о д а с и л
необходимо решить две системы: одну для определения внутренних
сил в основной системе и другую для раскрытия статической не­
определимости. Можно предложить полуавтоматизированный рас­
чет, при котором для определения усилий в основной системе при­
меняется метод сечений (как при ручном счете), а весь дальнейший
расчет проводится с использованием матричных операций по форму­
ле (8.96). Уравнение (8.96) представляет собой каноническое урав­
нение метода сил. При этом матрица (ВХ+Ь1В0Ь Х) представляет
собой матрицу единичных перемещений, а вектор L l B 0S 0p— вектор
грузовых перемещений. Эти выражения могут быть получены пере­
множением эпюр.
При использовании полуавтоматизированного расчета по методу
сил нецелесообразно первоначально переводить нагрузку в узловую,
так как эта операция приводит к излишним арифметическим вы­
кладкам. Рассмотрим два варианта перемножения эпюр: перемно­
жение трапеции на трапецию (рис. 9.1, а) и перемножение трапеции
на эпюру, описанную по закону квадратной параболы (рис. 9.1, б).
В первом случае (рис. 9.1, а)
J M M p dx = g i j [2 ( М Д + М 2М 2) + M , M 2+ М ЯЩ .
(9.1)
Во втором случае (рис. 9.1, б)
j M M Pdx = ^ j [М1М 1 + Ш 2М 2 + М 3М 3] .
12 Jft 2418
(9.2)
353
Формулы (9.1) и (9 .2 ) можно записать в матричной форме:
'2 Г M ,
(9.3)
! 2
м 2_
Г1 о о~ ГЛ*Л
0 4 0 м2
0 0 1 LMS
6£У
(9.4)
Рассмотрим стержневую систему, изображенную на рис. 9 . 2 .
Пронумеруем узлы и стержни. На участке, где эпюра М р меняется
по закону квадратной параболы, введем узел посередине.
ЕЗ,
e)
НШртн&я
М2 ларвёола
тч
Mi
M L 1
i
Mf
z
__^^
М,
г
i
м.
м2
Ц
I i 11i! Ii
Ш
Иг
.U2
.
Рис. 9.1
Рис. 9.2
Перемножая эпюры M и M р, получим
[Мг М 2
”2 а х а 1
<*i 2a,
/
X
h
6£70
М2
2аг
«а
М3
Mi
м.
м.
Щ.
«а
2аг
ая 0
0 4a,
0
0 '
0
0
а.
2a4
a,
u
а,
2 a 4_J
x
M,
м2
м:
м^
м3
м'
Af,
ж:
0
(9.5)
0
где С/о, /0—соответственно жесткость и длина, принятыевкачестве
основных;
li
l0
li
a,-' <=- E J i ' E J o - l o
EJ0
EJt'
Размеры матриц в (9.5) могут быть уменьшены, так как ординаты
обеих эпюр левее и правее узлов 3 и 5 одинаковы, а в точке 6 —
354
равны нулю.
__
__
[M t
M2
М2
М3
М4
М ъ\ x
'M м;
2cc!
аг
а ± 2аг.
,,
|
10
2а2
x 6EJ„
м;
щ
a 2 2a, + a 3
0
0
0
4а3
0
0
0
Мо
(9.6)
м4
а 3 + 2a4_j Л _
Формула (9 .6 ) позволяет вычислить одно перемещение. Для
вычисления всех единичных и грузовых перемещений при расчете
статически неопределимых систем необходимо вместо матрицы строки
поставить матрицу единичных моментов, записанную по строВ)\ .5
^f
' ~f 4 ^ ^ ^ ^ i
ZE3
EJ
E3
iP = s q d
©©
^J
f^
H
i r
'
Р^^^^^^Н^^^^^^Ц ,i^ ^I ^ ^I ^ ^I^ " ; t
©
Y « )©
k
M
(2 ) ,
4
А
2EJ
^э
E7
J^2 d ^
E3
4d
E J
% ^ 5 d
^ _ -------> -
^
^ -------- > i
6,
' (s)
©
e(s)
©
h-t
r
%)
U
лw
^
г) Q X E y E E E j
р Щ
Ж ^
^
I P ^
’ЩЩЩШВТ==' -t.t,.t,j>
Й Ш м
Sqd2
9qdz
Й
Mp
d w,
m
^1^ ^^^^^^^^^^^^^ \
*) g^^^^^^^^^^^^^^l f
iJsd
Z^-*iJid ll3d*Wt
\ф а
Ti/ed
zl3
ТПТГГптптггг.— , ^ r t f c .
3 ^ - l *Ё
^
n
^2
ш?
\i/6d
2
ЖП [ггттттггггт^—о
ЩХц=1
2!з
ДЩЕЕШШ=*-
12
355
кам L \ y а вместо столбца— ту же матрицу, записанную по столб^>
цам, и вектор эпюры моментов от нагрузки S op
L lB L xX + L lB S op = 0.
(9.7)
Для пояснения процесса построения матриц L x, В и векто­
ра S ap построимэти матрицы для рамы, изображенной на рис. 9.3, а.
При вычислении перемещений будем учитывать только изгибаю­
щие моменты. На рис. 9.3, б приведена нумерация стержней
и показаны сечения, которыми полностью определяется эпюра
моментов, а также правила знаков для моментов. Определим сте­
пень статической неопределимости как разность между числом
неизвестных усилий и числом уравнений равновесия (см. § 8 .2 ):
i = (2 •3 4 - 6 • 2) — (4 •3 +■ 1 •2) = 4.
На рис. 9.3, в — з изображены: основная система, грузовая
и единичные эпюры моментов. В соответствии с этими эпюрами
— 1
— 1
0
— 1
0
1
2/3
—2/3
—2/3
2/3
0
0
0
0
1
0
0
0
0
0
0
0
- 1/2
— 1
1
0
- 1/2
— 1
0
0
0
— 1
— 1
— 1/2
0
0
0
0
1
1
M=
»
^л
л jf
^ v = ^ V = 9 qd*. (9.8)
0
0
9
0
Построим матрицы ft/ для стержней:
. =3d_f2
b>6£j[f
h
2
2d
—
6 -2EJ
ll_ _ r f T f f 3f.
2j *£J L?—fJ’
G i]-
ь=м_Г2
0
3 6-2EJU 2J
3d Г 2
“ 6EJ [ l
6of
6-2 EJ
6 _ 3d_
° 8 ~ 6E3
356
1
0
0
4
0
0
0
o
1
П
2]
0
0
8
0
0
=
d Г
6EJ [
В приведенных матрицах вычеркнуты строки и столбцы, соответ­
ствующие шарнирам. Имея матрицы Ь} для каждого из стержнейпостроим матрицу В для всей системы:
'6
2
1
6
1
В
GEJ
6
3
3
9 0
0
0 12 0
0 0
9
(9.9)
12
0
0
9
Подставляя матрицы (9.8) и (9.9) в (9.7), получим, после сокра­
щения на 46 E тJ . систему канонических уравнений метода сил
l 8 X , - l 2 X , - 6 Х 3+ 6 X 4 + 40?d2= 0;
- 1 2 * j + 2 4 * ,+ 6 Х ,— 6 Х 4 — 94^ 2 = 0;
— 6 X * + 6 X, + 2 4 X ,- 1 2 * ,-9 4 q r f * = 0;
6 * ! — 6 X; — 1 2 X , 4 - 30Х4— 1 Aqd? = 0 .
(9.10)
Решение системы проведем с использованием метода Гаусса
(табл. 9.1).
Для построения окончательной эпюры изгибающих моментов
воспользуемся формулой М = М Х ^ г М 0р-,
— 1
0
"i
0
' 0^
— 1
—1
1
0
1
0,667
8
0,667 —0,667 —0,667
qd*
0
0
0
0
1
0
L0
0
0
0
0
0
1
0
— 1
— 1
1,012 -
0
0
3,994
+
qd
2
4,628
9
0
— 1
0
-2 ,9 1 3 j
0
0
0
—0,5
0
9
0
0
— 1
0
0
■4,697 4,867 1,715 —2,913 5,229 —4,628 1,011
7,003 —3,994]т.
—0,5
—0,5
На рис. 9.4 показана окончательная эпюра моментов.
В качестве второго примера рассмотрим комбинированную сис­
тему, изображенную на рис. 9.5, а. Требуется построить линии
влияния моментов в сечениях 1— 9 балки, в сечениях 10, 11 пилона
и в вантах. Предположим, что от действия окончательной нагрузки
все ванты работают на растяжение, поэтому при построении линий
влияния примем, что ванты работают на растяжение и сжатие оди­
наково. Для получения основной системы врежем в местах примы357
T а б л и ц а 9.1
Номера
уравнений
1
2
3
4
1
2
3
4
х2
*i
-1 2
24
6
^
18
— 12
—6
6
х*
Л*
6
—6
— 12
30
—6
6
24
— 12
J 8 ________ — 12
—0,667
15,996
—0,333
0,125
0,333 —0,125
П равая
часть
—40
94
94
14
2
x
—34
106
106
32
—40
—34
—6
6
83,316
67,320
1,998 — 1,998
21,752 -9 ,7 5 2
72,265
84,265
23,383
—0,448 |
91,491
68,110
i
1,012
3,994
4,628
2,913
кания вант к балке шарниры (рис. 9.5, б), примем
EF6 = EFU= «>; E J B= 0 ; E J 6 = E J n; EFB^EJ«,
где EF6i EFn— соответственно жесткости балки и пилона на растя­
жение-сжатие; E J 6y E J n—то же, на изгиб; EFB— жесткость ванты
на растяжение-сжатие.
2j913qd
4,697qd*
2,982qdк
fc s^ T
5,229qd'
P=6qd
w n m
'•7^ W
m
3,Mq4'4
^
*
м.
Рис. 9.4
На рис. 9.6, а — г изображены единичные эпюры. Для сокраще­
ния размеров на этом и последующих рисунках показаны только
те части системы, в которых внутренние усилия отличны от нуля.
Для построения грузовых эпюр разделим балку на десять равных
частей (см. рис. 9.5, а) и будем устанавливать груз P = 1 последова­
тельно сначала в точку /, затем в точку 2 и т. д. На рис. 9 .7 , а — з
показаны грузовые эпюры. При расположении груза в точке 4
(см. рис. 9.5, а) в балке не возникает эпюры моментов, а в вантах ^
358
Рис. 9.6
эпюры продольных сил, поэтому это положение на рис. 9.7 не при­
водится. Для получения линий влияния построим матрицу лишних
неизвестных
X = - (М тВм M + NBjWN (,p) - 1(МВмМор + N B y N op).
Далее используем формулы
M = M X + Mop; N = N X + N op.
(9. 11)
(9. 12)
359
Строками матриц M и N являются ординаты линий влияния.
Построим исходные матрицы, учитывающие деформацию изгиба
балки и пилона:
Г4 1
1 4
1
1
4
1
1
4
1
1
4
Вм =
(9.13)
1
1
4
1
матрицу
М т=
L
360
2
1
1
6
единичные эпюры, приведенные на рис. 9.6,
1
0
0
0
0,5
0,5
0
0
0
1
0
0
0
0,5
0,5
0
0
0
1
0
0
0
0,5
0,5
0
0
0
1
0
0
0
0,5
2
0
0
- -3
21
0
0
-- 3
(9.14)
Используя грузовые эпюры, приведенные на рис.
составим матрицу
0,5
М ор
L
0
0
0
0
0
0
0
0
0
— 2
—2
0
0
0
0
0
0
0
0
— 1
— 1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0,5
0
0
0
0
0
0
— 1
— 1
0,5
0
0
0
0
1
1
0
0
0
0
0
0
0
0
0
2
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0,5
3
3
4
4
2
2
0,5
9 . 7 , a — з,
0
0
0
0
0
0
0
0
(9.15)
Построим исходные матрицы, учитывающие деформацию растя­
жения в вантах. Подсчитаем податливости вант:
l\
EF
и
2d
V
2
d2
- W
d3
2 d V b d3
EJ
EF
-2 ^ 2 '6
6E J
EJ
= W
' 16-971^
2 ^ 5 -6 = ^ - 2 6 ,8 3 3 .
Составим матрицу
ВN
da '16,971
~
6E J
0
0
.
0
1
0
0
16,971
(9.16)
26,833.
0
Используя единичные эпюры, приведенные на рис. 9.6, а — г,
составим матрицу
— 1,414
0
0,707
0,707
0
0
0
— 1,414
1,118
0
0,707
—2,236.
(9.17)
Используя грузовые эпюры, приведенные на рис. 9.7, а —з,
составим матрицу
0
0
0
0
Г°, 707 1,414 0,707 0 0
0
0
0 0,707 1,414 0,707 0
0
. (9.18)
* .,- [ »
0
0
0 0
0
1,118 2,206 1,118
Подставляя исходные матрицы (9.13)— (9.18) в (9.11) и вы­
полняя матричные операции с помощью калькулятора, получим
ч
0,353
—0,169
—0 .1 0 6
-0 ,0 6 7
0,775
—0,280
—0 , 168
—0 , 103
0,324
-0,263
-0,143
-0,083
0
0
0
0
-0,208
-0,404
0,288
0,150
—0,312
—0 , 5 4 5
0,750
0,376
-0,328
-0,529
0,400
0,684
-0 ,268
-0.408
0,193
1,070
—0,149
—
0,220
0,075
0,518.
361
Подставляя значения X в формулы (9.12), получим:
'
M=d
0,162 0
0,388
0,324 0
0,775
0,530 0
0,247
—0 , 2 8 0 ■- 0 , 2 6 3 0
—0,224 - -0,203 0
— 0 , 1 6 8 • - 0 , 143 0
—0 , 1 3 6 - - 0 , 1 1 3 0
-0 ,1 0 3
. -0 ,083 0
—0,052 - -0,042 0
— 0 , 1 3 9 - - 0 , 102 0
-0 ,1 3 9
- - 0,102 0
0,063
088
0,119
—0,043
017 - 0 . 0 3 4
031
0,043
0,027
0 , 6 76
0,353
0,092
—0,169
—0 , 138
-0 ,1 0 6
—0 ,0 8 7
—0,067
—0,033
—0,093
L -0 ,0 9 3
•
-0,104 - -0,156 - 0 , 2 0 8 ■ -0,3 1 2 -0,305 • -0,429 -0 ,4 0 3 ■-0 ,5 4 5 0,443
0,103 0,750
0,288
0,219
0,563
0,150
0,376
0,075
0,188
0,134
0,247
0,134
0,24 7
0,009
0,057
0,1 2
0,234
-0,164
■0,328
' 0 , 4 28
-0,529
■ 0, 065
0,400
1,042
0,684
0,342
0,291
0,291
0,089
0,252
0,034
—0 , 134 —0,0 7 4 ” ]
—0 , 2 6 8
— 0,1 4 9
—0,338 —0,185
- 0,220
-0 ,4 0 8
—0,107 - 0 , 0 7 3
0,075
0,193
0,631
0,296
1,070
0,518
0,535
0,759
0,256
0,148
0,256
0 ,l4 8 J
0 , 0 9 0 0, , 0 5 5 т
0 , 1 9 5 0, 1 04 L
0 , 0 6 0
0 ,044 J
I
w = f - o 0:
—0,0 3 0,002
L о,
Линии влияния моментов в балке и пилоне и линии влияния
продольных сил в вантах приведены на рис. 9 .8 .
Далее остановимся на м e т о д e п e p e м e щ e н и й. При
использовании метода перемещений коэффициенты канонических
72
уравнений могут быть
найдены либо путем сос­
тавления уравнений рав­
2d
и*/
новесия (см. § 7.5), либо
1 ,,2yV J
* 5c
JП___ L9_ M '
^__^L ^ ■
CU !■■■пк---LilJ^ 7- 1 ^ П
путем
перемножения
эпюр (см. § 7.6). Причем
количество арифметичес­
ких выкладок при ис­
пользовании уравнений
равновесия меньше. По­
этому при расчете по ме­
тоду перемещений про­
цесс вычисления коэф­
фициентов канонических
уравнений в матричной
форме не является ра­
циональным, за исключением особых случаев
(наклонные стойки). Но
и в этом случае кальку­
ляторы можно эффек­
тивно использовать для
_/ ^ --- 3 ^ $6-12
0,2
<
решения системы урав­
//
$
2
-1
2
X
нений
и построения
0,1
sr
окончательных эпюр.
g^
Sg-tt
0,0
В настоящее время
наряду
с простейшими
Рис. 9.8
калькуляторами с од­
ной ячейкой памяти выпускаются калькуляторы с десятью ячей­
ками памяти и возможностью составления программ. Эти кальку­
ляторы могут быть эффективно использованы для перемножения
эпюр. Для того чтобы перемножать эпюры, используем формулы
(9.1) и (9.2). Чтобы воспользоваться формулой (9.1), необходимо
ввести в память калькулятора четыре числа: (Мг, М 2, М и М 2)<
362
1
—
а при использовании формулы (9.2) — шесть чисел: М±, М 2, М 3,
М и М 2у М 3. Далее в соответствии с формулами (9.1)и(9.2)составляются программы. Процесс перемножения эпюр ведется поэле­
ментно: вводятся ординаты перемножаемых эпюр по первому эле­
менту и результат перемножения запоминается, далее по второму
элементу и результат прибавляется к предыдущему и т. д.
Наиболее удобными являются калькуляторы с внешней памятью,
в качестве которой используется магнитная карта. При этом про­
грамму можно хранить на магнитной карте и перед началом работы
вводить ее с магнитной карты. Калькуляторы непрерывно совершен­
ствуются и появляются калькуляторы с большим объемом внут­
ренней памяти. При использовании таких калькуляторов процесс
расчета можно организовать следующим образом: ввести во внеш­
нюю память ординаты всех единичных и грузовой эпюр по первому
элементу, затем по второму и т. д. Далее перемножить все эпюры
по первому элементу и построить долю матрицы единичных коэффи­
циентов и вектора грузовых коэффициентов за счет первого элемен­
та, затем добавить долю за счет второго элемента и т. д. При таком
подходе снимается ограничение по количеству элементов и размер
задачи определяется только количеством уравнений (степенью ста­
тической неопределимости), которые решаются во внутренней па­
мяти. Для построения окончательной эпюры ординаты единичных
и грузовых эпюр вновь вводятся в оперативную память калькуля­
тора. Подобный подход называется поэлементным.
§ 9.3. АВТОМАТИЗАЦИЯ РАСЧЕТА СТЕРЖНЕВЫХ СИСТЕМ.
ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ
СТРОИТЕЛЬНОЙ МЕХАНИКИ ДЛЯ СТЕРЖНЯ
Выпишем систему смешанного метода (см. § 8.5)
B S + A TZ + A' = 0;
AS
+
>
P = 0. )
(У.1 У)
Процесс автоматизации расчета стержневых систем можно разде­
лить на два этапа:
1) составление системы (9.19);
2) решение системы (9.19).
Как указывалось выше (см. §8.5), для составления системы
(9.19) необходимо построить две матрицы: матрицу уравнений рав­
новесия узлов А и матрицу закона Гука В . Наиболее простым под­
ходом является составление матриц А и В «вручную» и ввод их в па­
мять ЭВМ. Более перспективно построение матриц А и В внутри
машины.
Остановимся на построении матрицы уравнений равновесия А .
Без использования ЭВМ она строится последовательно по строкам
в соответствии с порядком вырезания узлов (см. § 8.2). При хране­
нии информации во внешней памяти и построчном формировании
информацию по каждому элементу приходится вызывать дважды:
363
один раз при формировании строки, относящейся к одному узлу,
а второй раз — к другому, так как стержень соединяет два узла.
При использовании ЭВМ широко применяется поэлементный под­
ход — окончательные матрицы строятся последовательно по эле­
ментам (см. § 9 .2 ) и исходная информация хранится по элементам,
поэтому матрица А строится по столбцам, каждый из которых соот­
ветствует одному элементу. Обратим внимание на то, что и матрица
В строится также по элементам.
Остановимся подробнее на построении матриц уравнений равно­
весия и закона Гука для отдельного элемента. В отличие от матриц
А и В для всей системы эти матрицы для отдельных элементов будем
обозначать малыми буква­
ми а и b. Наиболее просто
эти матрицы строятся в си­
стеме координат, связанной
со стержнем. Эту систему
координат будем называть
местной, или локальной,
системой координат. Для
построения матрицы А для
всей системы необходимо
использовать общую, или
глобальную, систему коор­
динат.
Рассмотрим стержень в
локальной системе коорди­
Я
нат. Начало стержня обоз­
начим буквой «н», а конец
Рис. 9.9
—
свободы примем «нунФн> мЛФк (рис. 9.9, а). На рис. 9.9, б показа­
ны обобщенные силы, соответствующие этим обобщенным переме­
щениям. Аналогично предыдущему, составим уравнения равнове­
сия для стержня (рис. 9 .9 , б)
2 X “ 0 ’ Г HJC + rах = 0 ;
2 ^ = 0 , rUy + rKy = 0 ;
2 A f H= 0, mH+ /nK+ rK / =
(9.20)
0.
Внутренние силы будем характеризовать вектором (рис. 9.9,e)
S = [ЛШНЛ4К]Т.
(9.21)
Можно в качестве вектора независимых усилий* принять и дру­
гой вектор, содержащий три линейно независимых компоненты.
В соответствии с рис. 9.9, б , в имеем:
N = rKxt М п = — тю М к = mK.
364
(9.22)
Подставляя (9.22) в (9.20) и решая полученную систему, вы­
разим силы, действующие на элемент, через независимые
#•
н* = — 'гк * = — **>
(9.23)
H IJ =
тн+
г ку *
тк
■
— УИН + М К
/
l
Для определения поперечной силы применим формулу
мк ~ м н
(9.24)
Q = r»y =
1
Используя выражения (9.22) — (9.24), запишем связь между
всеми силами, действующими по концам стержня (рис. 9 .9 , 6 ),
Г К у
1 ~—
~
1 0 0
'rH
J
f
1
//
1
п
^%
Hч 0
0—
1 0 Ми
о"
0
~
г
^
K
X
Af.
0 1n —
1
/
1
гку 0
0 1
im
K1
или в сокращенной записи
и независимыми силами (9.21) в матричной форме
"
N
(9.25)
_
r = a*s,
(9.26)
где a*—матрица уравнений равновесия в местной системе коор­
динат.
Рассмотрим стержень в глобальной системе координат. На
рис. 9.10,a показаны обобщенные перемещения в локальной
X, tjz = [u„v„фн, ы лФ кР И глобальной (Z = [UKVHq>„, ^ кУкфк]т)
системах координат, а на рис. 9 .10,6— обобщенные силы, соот­
365
ветствующие этим обобщенным перемещениям. Векторы, коорди­
натами которых являются эти обобщенные силы, являются двой—
►—
►
ственными к векторам г, Z.
Итак,
^ = [^H.Y^Hy^H* ^кд^ку^к] У
(9.27)
^ = W . / > . R KXR , vrnK} \
(9.28)
Запишем связь между векторами (9.27) и (9.28).
Для узла «н» имеем:
R нл' ^*нл*^OS ^ ^ну Sin ОС,
^Hy = ^ s i n a + rHy cosa.
Аналогичные зависимости можно записать и для узла «к».
Итак,
R = Cx7;
(9.29)
где
Сг =
Здесь
co sa
s in a
с,- =
— s in a
co sa
0
0
0
0
1.
Умножая обе части равенства (9.26) на С и используя (9.29),
получим
(9.30)
R = as,
где
cosa
— sin a
0
sin a
cos a
0
0
0
1
n
»
x
a=
L
— 1
0
0
0
366
0
sin a
cosa
0
— cosa
— 1/1
\ц
— sin a
— 1
0
0
1
0
0
1 //
0
0
— sin a
0
о -1
x
_
cos a
0
cos а
-\ц
s in a
1
_
1
0
0
l_l
а “1
Г~
sin a
sin
cos a
cos a
1
1
1
—
1
sin a
Г~
cos a
~Т~
0
0
а
г~
cos а
J
1
sin
; (9.3i)
a —матрица уравнений равновесия в глобальной системе координат.
Запишем выражения для элементов матрицы а через координаты Х в, Ун; Х к, Ук.
Тогда
1 = V ( X K- X n)*-r (YK- Y ur ,
Ун ;
s in a = ^У н - —1
cos а —
Х к-Х п
Используя принцип двойственности (см. § 8.3) и дополняя
систему уравнениями закона Гука, получим полную систему
уравнений строительной механики в локальной и глобальной
системах координат.
В локальной
В глобальной
системе координат
системе координат
~* ~*
\
a*s= r;
I
as = R) \
(9.32)
(9.33)
a TZ = A, J
(«•)'|тг = Д, j
^
^
(9.34)
или s = b~LA,
A = bs
(9.35)
где
п
/
EF
b^
0
0
I
EF
1
0
0
0
0
/
/
3EJ
6EJ
1
1
~М7
6E J '
(9.36)
0
0
4EJ
2EJ
1
2EJ
I
1
(9.37)
AEJ
Л
В случае, если в начале или в конце стержня имеется шарнир,
то в матрице а соответственно выбрасываются строки и столбцы,
соответствующие шарниру. Так, для случаев, изображенных на
рис. 9 . 1 1 , a , 6 ,e, матрицы а соответственно равны:
sin a И
sin а п
—
cosa
-c o sa
/
i
cos a
COS OL
‘— cosa'
— sina
— si na
/
Г"
— sina
1
0
а=
sin а
a=
а
cosa
cosa
~~1
sin а
sina^
cosa
cos a
1
sina
cos a
sin
a
~г~
0
L
L
—
367
Приведем пример составления матрицы А с использованием
поэлементного подхода. Рассмотрим систему, изображенную на
рис. 8 .5 ,a. Первоначально будем строить матрицы а в местной
нумерации и далее расставлять ее части, соответствующие началу
и концу, в общую матрицу А в соответствии с глобальной нуме­
рацией.
С терж ень 1:
Х н = 0; Y n = 0; Х к = 0; Ук = 4а;
h = V { X K- X nf + (Y K- Y Hy = 4a;
Х к- Х н
0
cos а,1 = — lx
,— - = j=
4а
Л
.
0;
Кк - К „
sm а,1 = ^ Ц1Х
—-=
-
1.
Матрица а для стержня 1 в местной нумерации имеет вид
sin а± 1
J
— COSOC3
cos a i
/
—1
sin a j
0
—
sin а*
1
п
*Ua
0
0
—1
0
— V 4o
©
sin a i
1
cos a i
^ r _
cosa*
L
о
1
0
Точка «н» совпадает с заделкой, для которой составлять уравне­
ния равновесия не требуется, поэтому эта часть матрицы не ис­
пользуется. Точка «к» в глобальной нумерации совпадает с точ­
кой У, поэтому эта часть матрицы ставится в матрице А на
место, соответствующее точке 1 (табл. 9.2).
С т е р ж е н ь 2:
Х п = 0, Ун = 4я, Х к ~ 3 a, Y K~ 4 a ;
/, = V (3а — 0 ) 2 + (4а — 4 a f = За;
cos a 2 =
368
3a-0
^
■=
,
1
;
.
4a-4a
sin a 2 = ^ ^ — =
Л
0.
Матрица а2 имеет вид
— cos а.
—1
/a
cosa,
sin « 2
/2
cos а 2
sina,
0
7 30
1
0
0 —73а
Л
0
0
«н»
cos а 2
sina,
а 2=
sin а 2 П
1
L
0
1 _
Расставляем блоки а 2 в соответствии с глобальной нумера­
цией (табл. 9.2).
С т е р ж е н ь 3:
Х н= За, Хк = 6 а, Ун = 4а, Ук = 0;
/g = J^ (6 a — За)2 + (0 — 4а) 2 = 5а;
6а— З
а 3
.
0 — 4a
4
COSa3 — ^ ^
— 7f » sin а з — 5a
“
“
У*
5a
Матрица а 3 имеет вид
sin «3
— cosa
h
cos OC3
— s in a 3
0
а, =
cos a 3
sin а й
-
0
sin a 3
h
cos a 3
1
h
h
j*_ ___4_
5
25a
£ ___3_
5
25a
—1
sin a 3
^3
cos a 3
0
0
sin a 3
h
cos «3
h
h
0
1
~
T~
5
_ £
5
1
0
— 1
j T
25a
3 «н»
25a
0
4
Г ”
25a
25a
_3_ _ J L «к»,
<
25a
25a
0
1
_
Ставим верхний блок (н) в матрицу А в соответствии с гло­
бальной нумерацией (табл. 9.2).
Итак, табл. 8.3 построена по строкам (по узлам), а табл. 9.2 —
по столбцам (по стержням). Обратим внимание на то, что знаки
у элементов табл. 9.2 противоположны знакам у элементов табл. 8.3.
Получилось это вследствие того, что при составлении табл. 8.3
использовались реакции со стороны стержней на узлы (см.
рис. 8 .5 , в — г), а при составлении табл. 9 . 2 использовались реак­
ции со стороны узлов на стержни (см. рис. 9.10, б). Таким образом,
при постержневом подходе уравнения равновесия будут иметь вид
AS = P.
(9.38)
На процессе построения матрицы В останавливаться не будем, так
как он подробно рассмотрен в § 8.4.
3G9
Преждечемрассматриватьрешениесистемы (9.19), остановимся
на свойствах матриц систем канонических уравнений метода пере­
мещений и метода сил. Элементами первой матрицы являются реак­
ции от единичных перемещений (жесткости), поэтому эта матрица
T а б л и ц а 9.2
' 4^
Стержнн
Узлы
s,
5:
N
^v
"н
_ _ ^
Zx
4а
N
5з
^к
N
М*
^K
_3_
____ 4_
“ 5
25а
_4_
25а
~1
1
Xy
1
1
Зд
1
Ъх
2
____1
Ъу
3а
1
2m
4
T
_J3 _
25а
3
25^
— I
носит название матрицы реакций или матрицы жесткости. Эле­
ментами второй матрицы являются перемещения от единичных сил
(податливости), поэтому эта матрица носит название матрицы
перемещений или матрицы податливости. Первую из матриц
обозначим буквой R (ее элементы г), а вторую — В (ее элементы 6 ).
Обе матрицы являются симметричными. Запишем выражение для
потенциальной энергии
n = ^ R 'Z ,
—
У
(9.39)
—
V
где R T—силы, действующие на упругую систему; Z — соответст­
вующие им обобщенные перемещения.
В соответствии с определением
R = RZ,
Подставляя (9.40) и
n = Z'RZ,
370
(9.40)
Z = BR.
(9.41)
(9.41) в (9.39), соответственно получим
(9.42)
П = RJBR.
(9.43)
В соответствии с формулами (9.42) и (9.43) потенциальная энер­
гия является квадратичной формой (см. § 13.6). Причем матрица
реакций R является матрицей квадратичной формы, когда в ка~>
честве вектора принят вектор перемещений Z, а матрица податли­
вости В также является матрицей квадратичной формы, но тогда,
когда в качестве вектора принят вектор сил R . Потенциальная
—>
—^
энергия всегда положительна (при любых векторах Z и R ), поэтому
обе матрицы R и В являются положительно определенными (см.
§ 13.6). Следствием является то, что для решения систем канониче­
ских уравнений метода сил и метода перемещений всегда может быть
использован метод Гaycca с диагональным ведущим элементом
(см. § 13.4).
Для решения системы уравнений (9.19) может быть использован
либо метод перемещений, либо метод сил. При использовании ме­
тода перемещений (см. § 8 .6 ) необходимо решать только одну систе­
му линейных уравнений, причем матрица системы является сим­
метричной и положительно определенной. Порядок системы при
жестких узлах равен 3n (где n — число узлов).
За счет симметрии в памяти ЭВМ можно хранить только половину
матрицы, включая главнуюдиагональ. Для решения системы можно
использовать наиболее удобный вариант — метод Гаусса с выбором
диагонального ведущего элемента.
При использовании метода сил (см. §8.7) необходимо решать
две системы: одну для определения усилий в основной системе
(порядок системы при жестких узлах 3rt) и вторую — для раскры­
тия статической неопределимости (порядок системы равен степени
статической неопределимости, при жестких узлах i= 3m —3n, m —
число стержней). Матрица первой системы имеет тот же порядок,
что и при использовании метода перемещений, но ее элементы рас­
положены хаотически. Эта система в каждом случае является до­
статочно простой при индивидуальном подходе, но при общем под­
ходе необходимо использовать метод Гаусса с выбором главного
элемента (см. § 13.4). Матрица второй системы является положи­
тельно определенной.
Таким образом, при применении ЭВМ для решения системы
(9.19) более рациональным является метод перемещений, см. вы­
ражение (8.59).
Обратим внимание на то, что при расчете стержневых систем
по методу сил без использования ЭВМ для определения усилий
используется метод сечений и решается только вторая система.
Метод сечений при использовании соответствующих сечений приво­
дит к минимуму арифметических операций при «ручном счете».
Метод сечений трудно запрограммировать ввиду его логической
сложности.
Ввиду поэлементной структуры матрицы А и квазидиагональной
структуры матрицы В можно матрицу реакций R = A B ~ lAT и вектор
—
>
A B - 1А' строить поэлементно.
Развернем выражение для матрицы R=AB-*A*i
fL
Ог
Qm
*
•
(9.44)
»
°лт
Здесь а±у а 2у . . . , а т — столбцы матрицы Л, относящиеся соответ­
ственно к первому, второму и т. д. элементам. Аналогично можно
~>
развернуть выражение для АВ~гA'. Использование поэлементного
подхода позволяет производить последовательную обработку эле­
ментов, что приводит к экономии памяти ЭВМ и снимает ограниче­
ние на количество элементов по памяти при формировании.
После того как система уравнений метода перемещений (8.59)
сформирована, ее решают с использованием метода Гаусса (см.
§ 13.4) и вычисляют перемещения узлов в глобальной системе ко~»
ординат (Z).
Построим формулу для вычисления усилий в /-м стержне, ис­
пользуя полную систему уравнений строительной механики для
стержня. Подставляя второе уравнение (9.33) в уравнение (9.35),
получим
S j ^ b - ' a ] Zj,
~^
где Zj — вектор, координатами которого являются перемещения
начала и конца /-ro стержня (эти перемещения выбираются из
—
^
общего вектора Z узлов системы);
S j= lN jM ^-M ^.
Д ля определения поперечной силы используется формула (9.24).
Таким образом, процесс вычисления усилий проводится также
поэлементно.
§ 9.4. МАТРИЦЫ РЕАКЦИЙ (ЖЕСТКОСТИ) ДЛЯ ПЛОСКИХ
И ПРОСТРАНСТВЕННЫХ СТЕРЖНЕЙ И ИХ ИСПОЛЬЗОВАНИЕ
При применении поэлементного подхода широко используется
понятие матрицы реакций (жесткости) R [см. (9.40)]. Построим
матрицу реакций R в глобальной системе координат в местной ну­
мерации с использованием полной системы уравнений строительной
механики для отдельного стержня (см. §9.3). Подставляя второе
уравнение системы (9.33) в (9.35) и результат в первое уравнение
(9.33), получим
^-
^
R = RZ,
где
R = a b- 'a ' J * * *
jH .
L^KH *MCKj
372
(9.45)
Вычисление произведения Л # ~ М Т, поясненное схемой (9.44), есть,
по существу, вычисление матриц реакций стержней и расстановка
ее блоков в общую матрицу R.
Итак, процесс формирования полной матрицы R состоит в сле­
дующем: последовательно на одном и том же месте памяти строят
матрицы а и b для каждого из стержней, далее по формуле (9.45)
J
_________] г £ V ________________i l l £
________ 17 ^
_ £_
_________ i г _ 5 ________________ / 7
VКНН ^
7П(1К
7
*W
^KK
Mampuu,a R
~
17~ Z
J
т
**
^HH
^HK
^KH
^KK
м
С _____________ X \
_________i 7 ^
\
“ ^T"
Т~
5
J
E s
_
Us
E ?
UJ
Рис, 9.12
строят матрицы R для' каждого стержня и далее в соответствии
с глобальной нумерацией производят рассылку блоков матрицы R .
На рис. 9 . 1 2 ,a показан стержень некоторой стержневой системы
и приведена матрица R (рис. 9.12,6) для этого стержня. В соот­
ветствии с рис. 9.12,a стержень ij в точке i имеет шарнир. Для
стандартности процесса формирования при наличии шарниров
строятся полные матрицы a (9.3l) и b~L (9.37). Далее блоки R Hni
#нк> ^кк (п 0 условию симметрии блок R Kli можно не использо­
вать) (рис. 9.12,6) рассылаются в общую матрицу реакций R
в соответствии с глобальной нумерацией (рис. 9.12,<s). Учет шар­
нира и горизонтальной связи (рис. 9.12,a) производится на уровне
матрицы R после ее полного формирования либо путем подста­
новки на соответствующее место главной диагонали большого
числа (жесткая пружина), либо путем вычеркивания (зануляются
строки или столбцы, соответствующие вычеркиваемой связи, а на
место главного элемента ставится единица, рис. 9.12,<s), либо
путем выбрасывания строк и столбцов, соответствующих нало­
женной связи с последующим сжатием матрицы R. Последняя
операция логически более сложна, чем предыдущие, так как при
этом нарушается структура матрицы.
Остановимся еще на одном способе формирования матрицы
жесткости системы, широко применяемом в дальнейшем. Исполь­
зуя формулы (9.32) и (9.35), аналогично предыдущему, получим
373
r
формулу для построения матряцы реакций в местной системе
координат
r = rz,
(9.46)
r = a*b*(a*y.
(9.47)
где
Подставляя вформулу (9.47) выражения для а* (9.24) и b~x (9.37),
получим
EF
1
0
0
r =
EF
1
0
0
EF
0
0
12EJ
6EJ
0
0
12EJ
6EJ
1
/3
/2
6EJ
4EJ
/2
1
0
0
12EJ
6£/
P
6£ /
1?
/2
0
0
/3
/2
6EJ
2EJ
1
(9.48)
££
/
0
2E/
0
/
0
0
X2EJ
6£7
1*
/2
6EJ
4£7
/?
1 J
Построим матрицу перехода от общей (глобальной) системы
координат к местной. В соответствии с рис. 9.10,a для узла «н»
имеем:
ип~ Uu cosa + F Hsin a ;
vH= —UHsin a + VHcos a.
Аналогичные зависимости можно записать и для узла «к». Итак,
z = CZ,
(9.49)
где
C=
с
0
0
с ]■
Здесь
c=
co sa
s in a
sin a
co sa
0'
0
0
0
1
Обратим внимание на то, что в силу принципа двойственности
C = C J [см. (9.29)].
В соответствии с формулой (9.42) потенциальная энергия, запи­
санная через матрицу реакций в местной системе координат, нмеет
вид
1 ^> ~>
(9.50)
П = ~2 z^rz.
374
Подставляя (9.49) в (9.50), получим
где
Я = С ггС\
(9.51)
Здесь R —матрица жесткости в глобальной системе координат.
В соответствиисформулой (9.51) формулу (9.47) можно трак­
товать как переход от матрицы жесткости, при которой в качестве
—>
вектора перемещений принят вектор А, к матрице жесткости, когда
в качестве вектора перемещений принят вектор z , причем
_^
(9.52)
Покажем, как, используя формулу (9.51) поматрице жесткости
для стержня с жесткими узлами, построить матрицу жесткости
для стержня с шарниром в точке «н» (см. рис. 9.11,a). В этом
случае шн = 0. Выпишем из (9.48) строку, соответствующую mHi
A = (a*yz.
6EJ
^н= —
. AEJ
6EJ
. 2 EJ
^н + — СГн” — ^ к + — фк =
л
0-
(9.53)
Выражая из уравнения (9.53) срн, получим
Фн ” — 27 1?н
Используя
(табл. 9.3).
выражение
3
1
2i VK
2
(9.54)
^ к’
(9.54), построим матрицу
перехода
T а б л и ц а 9.3
Неизвестные
^н
1
0
фн
0
«К
0
0
0
ип
ь'к
фк
гн
"н
0
I
_3_
"к
*K
0
0
0
0
_3_
0
0
____ ^
21
2
0
27*
0
0
0
1
0
0
0
1
0
*K
0
0
1
Запишем связь между н о в ы м вектором перемещений
2! =
[м ни н
z = [unvнФн
И А Ф к ] Т»
« А Ф К] Т,
и стapым
z = LZi.
(9.55)
Матрица L приведена в табл. 9.3.
375
Подставляя в формулу (9.51) вместо С матрицу L, построим
матрицу реакций для стержня, изображенного на рис. 9.11,a:
'
0
EF
1
0
0
о
3EJ.
/з
0
3EJ
t3
3EJ
/2
EF
1
0
£F
/
0
0
3E J
13
3EJ
/2
3EJ
/2
3E J
1
iL
1
г, =
3EJ
P
3EJ
/2
0
0
0
0
(9.56)
Аналогично построим матрицу для стержня, изображенного на
рис. 9.11,6:
n
EF
' _Ё£0
0
3EJ
/3
3EJ
/2
3EJ
/2
3EJ
1
0
0
EF
1
0
3EJ
13
3EJ
/2
0
3EJ
/3
1
0
0
EF~
1
0
1
0
0
0
3EJ
/3
3EJ
/2
(9.57)
Для получения матриц реакций (9.56) и (9.57) можно использовать
процесс исключения по Гауссу — Жордану (см. §12.4). Исключая
из матрицы (9.48) третью или шестую строки, получим соответ­
ственно выражения (9.56) и (9.57).
Построим матрицу реакций для системы, изображенной на
рис. 8.5,a (выше для построения этой же матрицы использована
матрица А).
С т е р ж е н ь 1.
В соответствии с формулой (9.57) имеем
’ EF_
EF
~|
0
0
0
4a
4a
3EJ
64a3
3EJ
16a2
3EJ
16a2
3EJ
4a
EF
4a
0
0
£F
0
3EJ
64a3
3EJ
16a2
0
0
r, =
0
1 нн
_^*KB
376
ГНк1
0
0
4a
3FJ
64a3
__ 3£7
16a2’
0
3EJ
64a3
(9.58)
^H = 0 , к„ = 0 , АГк = 0 , к к = 4а;
1 = V ( X K- X Hr + (YK- Y ^ = 4а;
cos а х- * K ^ ^ 11 =
0,
sin a t = 4^ fl- =
1.
Для построения матрицы реакций в глобальной нумерации (для
узлов 1 и 2 , см. рис. 8.5,a) из матрицы (9.57) используется только
блок r KK. С учетом структуры блока г кк матрица перехода С*
[см. (9.49)] имеет вид
[
cosa
— sin a
sin a1
Г 0
cosa] — [ — 1
11
0j '
(9.59)
Переведем блок г кк в глобальную систему координат [см. (9.51)]
p(D
Ai
кк
0
.1
-[?
-1 1
0]
EF
4a
— 1
0
0
3E J
0
64а
fEF *
4а
0
3E J
64a3
- i 0 oЧ J -3EJ
64a3
0
0
0
EF
4a
’
(9.60)
С т e p ж e н ь 2.
В соответствии с формулой (9.56) имеем
'
r, =
EF_
3а
0
0
3EJ
21a*
EJ
3а
0
0
0
EF
~ За
3EJ
27a3
3EJ
9a2
0
0
0
3EJ
27аг
3EJ
9a2
£?
За
0
0
3E J
21а?
3EJ
9a2
3EJ
Ы2
cFJ
За
0
0
_ Г Г„н Гнк]
~[r
кн
ГKKJ -
(9.61)
Для стержня 2 глобальная система координат совпадает с локаль­
ной, поэтому r 2= R {^:
[£» 9 •
* “ ’" L^KH ^KKj
( 9 -6 2 )
С т e p ж e н ь 3.
В соответствии с формулой (9.48) имеем
EF
5а
0
0
Г Q=
EF
Ъа
0
0
12£/
125а3
6EJ
25а2
6ЕУ
25а2
4EJ
Ъ
а
0
0
12EJ
— 125а3
6EJ
25а
2
0
0
L
EF
Ъа
f нн
—
0
-
EF
Ъа
6EJ
' 25а2EJ
Ъа
" -(3 )
0
0
0
l2EJ
125а3
6EJ
25а2
6EJ
25а2
2EJ
Ъа
0
0
12£7
125а3
— 6EJ
25а*
0
о
H
б£/
_ 25а2
4EJ
Ъа
—(3)
' нк
(9.63)
-(3) »
_' К3Н Гкк.
* „ = За, Ун = 4й, Х к == 6 fl , ^K = : 0 ;
/.= = 1 (6 а— За)3-T-(0 - - 4а) 2 = 5а;
— ( )
6a —З а
3
cosа3 = — а~— = ^> sm а 3 =
4_
0 —4а
5а
5*
Для построения матрицы реакций в глобальной нумерации из
матрицы (9.63) используется только блок r HH. В соотЕетствии
с формулой (9.49) матрица преобразований для стержня 3 будет
■_з
A_
5
Ся =
5
_3
5
4_
5
о
0
0
(9.64)
0
1-
Переведем блок г нн в глобальную систему координат (9.5l)
Ян
(3н)
EF
5a
3_
5
_4_
5
0
0
0
1
0
9EF _j_ 192E J
125а
3125а3
l4iEJ
\2EJ
125а 1 3125а3
24EJ
125а2
378
0
0
6EJ
l2EJ
125а3
25а2
4£/
6£7
5а
25а2
144£/
12EF
125а + 3125а3
16££ ,I _ ^^144£7
^^^^_^_^^_^_
125а ^ 3125а3
18EJ
125а2
“ J3
5
4_
5
0
_
_4
5
3_
5
0
2AEJ “
125а2
18£7
125а2 •
AEJ
5а
(9.65)
Используя матрицы (9.60), (9.61) и (9.65), построим матрицу
реакций для системы, изображенной на рис. 8.5, ai
ГЯЖ + ЯЙ
№
н
EF
3EJ
3а ~*” 64а3
0
0
EF , 3E J
4а 1 27а3
EF
За
0
0
Яй
KK
+tfsJ
EF
3а
0
3EJ
27 а 3
3£У
0
3EJ
27а3
12EF , l44EJ
3125а3
125а
4097EJ
16EF
о
152EJ , \92EJ
375а
3125а3
144£/
12EF
125а 1 3125а*
24 EJ
9а2
0
125а
1 2812 5а?
71£7
375а?
1 25 а3
3E J
9Ф
24E J
125а2
7XEJ
375а2
9EJ
5а
(9.66)
Пренебрегая деформациями от продольных сил, запишем [см. (8.71)]
Ui
Уг
z =
и*
v,
_ф2 _
~4_
.3
0
_4_
3
1
0
0
0
0
1_
L_0
И
= LZi.
(9.67)
—Г
Преобразуем матрицу (9.66) к вектору перемещений Z*
Г
Rx = L^RL
83
180а3
= £7
1
. 15а3
1
1
15а3
= fJ
_9
5а -
0,4611
iа3
*
0,0667 ^
0,0667
Ла2
а?
1,8 —
а ~
(9,68)
Выражение (9.68) полностью совпадает с выражением (8.76),
при этом за счет учета несжимаемости матрица (9.68) не зависит
от EF (при проведении преобразования (9.68) слагаемые, зависящие
от E Fy сокращаются).
Обратим внимание на то, что приведенный алгоритм является
слишком трудоемким при ручном счете и проигрывает алгоритму,
рассмотренному в § 8 .6 . Однако логика алгоритма проста и в ней
четко просматривается универсальность и системность, поэтому
этот алгоритм широко используется в автоматизированных системах
расчета стержневых систем.
Построим далее матрицу жесткости для стержня с учетом де­
формаций сдвига. В качестве степеней свободы и соответствующих
им обобщенных сил примем те же, что в стержне без учета сдвига
(см. рис. 9.9, а, 6). В качестве вектора независимых усилий примем
379
усилия, действующие в точ­
ке «к» стержня (рис. 9.13,a):
M
\
t)
N,
\Ay
N=1
щ
s = [N
—*-
В соответствии с рис. 9.9,6
и 9.13,a имеем:
7
^ ~ Гкх’ Q ~
^к?/’
M = тк.
(9.69)
M,
’I
Подставляя (9.69) в (9.20) и
решая полученную систему,
выразим силы, действующие
на элемент, через независи­
мые
гкдг
N,
ндг. —
| Q =;
Q,
rz
кч
м,
%
Гк
Qy
Ни
mH^ —mK— rKTJl ^ — M + Q l.j
(9.70)
—
М~1
i4
Q М].
l )
Рис. 9.13
TJ
Используя (9.69) и (9.70), запишем связь между всеми силами,
действующими по концам стержня (см. рис. 9.9,6), и независи­
мыми в матричной форме
0
0"
^H X
0
0
^tt'/
'N
—
1
0
т »
Q
(9.71)
“ о
0
^K X
M
- 1
1
1
1
1
0
Г «.у
тк _
I
или в сокращенной записи
_
0
—
1
0
0
1_
^
r = a*s.
~>
(9.72)
Построим далее матрицу Ь (рис. 9.13, а)
и
v
_Дф
~N "
= b
Q
_ м ._l
Обозначим воздействие N = 1 (рис. 9.13,6) цифрой /;воздействие
Q = 1 (рис. 9.13, <s) цифрой 2\ воздействие M = 1 (рис. 9.13,г)
цифрой 3, тогда
I
r s „ «1 . ®13
(9.73)
ь = ^21 S22 в*.
_^31 ^32 «зз.I
Для определения коэффициентов матрицы b перемножим эпюры,
380
изображенные на рис. 9.13, б—г:
би — EF
TW * 1 1' 1 “ ~£У * ^12 “ ^21 = «18 “ ^31 = 0 >
/3
kl
с _ I /2
^ + iGF
.I M
=
3£y
+
22 — £ f 2
* •'*
3EJ 1 GF ’
где k —коэффициент, учитывающий неравномерность распределе­
ния касательных напряжений по поперечному сечению;
EJ / i - i =
«23 — «32 —
/2
2
3, = ^EJ . 1---Ы—
= EJ1
E J ' 8“зз—
Подставляя матрицы (9.71), (9.73) в формулу (9.47), получим мат­
рицу реакций для стержня с учетом деформаций сдвига в местной
системе координат.
- 't
J
j ?
fi,
г
В)
+ №
Г№
и
У7
tU
'H
Z
и,н
>
\
V.кх
f>
Г.Т*^----- *“X
ч / \ %
«Я
rKg
нт
ЬЛг
m,
Гнх
ij* f c W r,,
А"
глг^ 1 т tf7,
" нЯ
t)
> ' *ц
^_ J W
/ \ &%
JV
1
г;
м.
QА
{ >
*z
*N
м,
Рис. 9.14
Построим далее аналогичную матрицу для пространственного
стержня. В качестве степеней свободы и соответствующих им обоб­
щенных сил примем перемещения и силы, показанные на рис. 9.14, а,
б. Составим уравнения равновесия для стержня (рис0 9.14, б)
2 ^ = 0’ r НАГ+ Гкд; = 0‘»
2 У = 0 > rHyJr rKy==^y
2 Z = 0’
r*. + rK2 = 0\
2 ^н х ^ 1 ^> mKx H- tn*x “ ^>
2 М Я:/ = 0 , тпщ + тку — rK2l = 0 ;
2 MHz = 0 , m ^ + m , , z + r ^ l ^ Q .
\
(9.74)
381
Внутренние силы будем характеризовать вектором (рис. 9.14,г)
7 = [NQyQg M xM yM z] \
(9.75)
В соответствии с рис. 9.14, б , в имеем
N = rKX> Qy = rKy> Qz=^r*z,
1
М х = ткх, М у = тку, M z = mKZ. f
(9
76)
Подставляя (9.76) в (9.74) ирешая полученнуюсистему, выразим
силы, действующие на элемент, через независимые
^нх~
г кх “
^ ’
ГЩ"
ГкУ~
Qy ’
^ H Z
^ K Z
=
(9.77)
Q z '
Щнх -
Н1КХ
^x'
tTlH,j —
tTlKу ~г Г кz^ =
^ V ~^~ Qz^*
™nz “
^Kz ^Kl^
2
Qy^'
1?Г:~ "^ _г
^y
Используя выражения (9.77) и (9.76), запишем связь между
всеми силами, действующими по концам стержня, и независимыми
(9 .7 5 ) в матричной форме
00
0
~ — 1
0
0
Г\1Х 1
Г«у
Гпг
т„х
т«у
тяг
^KX
Гщ,
^KZ
m*x
mKlJ
m*z
0
— 1
0
0
0
0
0
0
— 1
0
0
0
0
0
0
— 1
0
0
0
0
/
0
— 1
0
0
—1
0
0
0
— 1
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
I
или в сокращенной записи
_
N п
Qy
Q,
мх
м
(9.78)
и ^ 2_
(9.79)
r-a*s.
Далее построим матрицу закона Гука b (рис. 9.14, в, г)
I
~N
u
V
w
=
382
b
■
%
Qz
A<P.v
м х
Афу
му
_ А <Рг_
L М г_
(9.80)
Перемножая эпюры, изображенные на рис. 9.15, получим
b=
u —
33 —
55 ”
0
0
0
0
0
6u
0
0
0
б35 ^26
622
0
0
0
0
0
^33
•
»
0
0
б44
0
0
0
0
0
0
0
б55
^53
0
0
0
_ 0
s 6fi_
бв2
_
12
kl
/
'3 ,
fi
—
fi
—
fi
EF . 22 3E J ^ GF ’ U26 -- 62
2EJZ ’
1
kl
p
/3
fi —
— 6 5з —
fi 44 —
>
°36
3EJ '^ GF
2 £ //
= G /P
1
1
fi
°бв -~ = E J г •
EJ„ '
(9.81)
Подставляя а* (9.78) и b (9.81) в формулу (9.47), получим иско­
мую матрицу реакций.
ШЖ i 1
Ж -Ij
Ж У » Ш » Д
Рис. 9.15
Далее рассмотрим случай, когда стержневая система содержит
криволинейные стержни. В этом случае каждый из криволинейных
стержней можно заменить вписанным многоугольником, но при
этом возрастает количество узлов, а следовательно, и количество
неизвестных, поэтому этот путь не всегда оправдан. Произвольную
кривую можно приближенно заменить коробовой кривой (набором
сопрягающихся дуг окружностей). В этом случае необходимо по­
строить матрицу реакций для элемента, ось которого описана по
дуге окружности. Построим матрицу жесткости для элемента, изо­
браженного на рис. 9.16, а.
Составим для этого элемента уравнения равновесия (рис. 9.16, б)
* = 0 , rH + r£ c o sa + r£ s in a = 0 ;
2 ^ = 0, — г„— rnC O sa+ rfc sin a = 0;
> (9.82)
2 ^ н=-0 , — тп—тк — г*кг ( 1 — c o s a J + r^ r s i n a = 0 . ,
2
383
N
-r'$iny
Рис. 9.16
В качестве вектора независимых усилий примем (рис. 9.16,e)
s = [tf Q М у .
(9.83)
В соответствии с рис. 9 .1 6 ,6 ,e можно записать:
r*K= N, r£ = Q, тк = М.
(9.84)
Подставляя (9.84) в (9.82) и решая полученную систему, выразим
силы, действующие на элемент, через независимые
ri = — N c o s a — Q sin a;
\
rJ = N s in a — Q cos a;
/
(9.85)
mH= — M — Nr (1 — cosa) + Qr sin a . J
Запишем выражение (9.85) в матричной форме
'r*H "
'н
m^
гп
r=
или
r1
'к
fi
'к
_™ к_
— co sa
s in a
—r( 1 — cos a)
— s in a
— cosa
rs in a
i
о
о
0
0
— 1
0
“ 5“
1
о
0
1
~
N
Q
(9.86)
м
r = (a*)s.
(9.87)
Выпишем векторы обобщенных перемещений, соответствующие
^ ^
векторам r и s :
3S4
r ^ z = [ 4 z S c Ря 4 ^ Ф к ]т;
(9.88)
s —>-A = fAz'
(9.89)
Az"
Аф]т*
—^
Координаты вектора Д пояснены на рис. 9.16,e. В соответст­
вии с принципом двойственности
A = (a*)Tz.
(9.90)
Закон Гука имеет вид
Д = bs.
(9.91)
Построим матрицу b. 'Ha рис. 9.16, г показан элемент с при­
ложенными к нему силами N, Q и M . На рис. 9.16, дпостроены
эпюры моментов, а на рис. 9.16, e эпюры продольных сил от
iV=l, Q=1, Af=l;
8ц
б13
b = ^21 ^22 ^2 3
(9.92)
_83 x б32 633j
Перемножая эпюры, изображенные на рис. 9.16, 5, e> получим:
а
6# = Y j j ( 1
cos ф)2 r dф = ^ j - ( а — 2 sin а + 0 J ,
где
о
612
а , sin 2а
P1 = Y , + ~ T ~ ’
а
e g = ^F \
c o s2
((r (ifp = ^
;
0
a
622
=
^ 7
j sin 2 фг dф = ~ f ,
0
где
ft _ а
Г2
~2
sin 2а #
а
4
’
^ = ^ f J ^ H * v ' dcP= ^ ;
0
а
l>s
а
сд
г
1
6w =
1
f7
а
Г
•
j
f sin2 а
^i 2 = -pp- \ cos ф sin фг dф = ^тг ^ а
;
r2
f*
\ (l-< * ^ )rd c p = ^ y ( a - s in a ) ;
а
,M
13
№ 2 418
385
<7
При малых углах а более удобными являются формулы, в ко­
торых тригонометрические функции заменены степенными рядами
(в противном случае при малых а получается разность близких
чисел и требуется высокая
P=M
точность вычислений). Итак,
sina — а —^ - +
cosa=
1
— ^7p +
s in 2 a = 2 a - ^
cos 2 a =
Pi=
Р2 “
1
0 (a5),
0
(a4)-,
+
0
(a5),
— ^ 2 _ _^ о (а4);
= a —^ +
a
УЛ.
~1
s in 2 a
а
= T+
0
0
(as);
(a*).
В табл. 9.4 приведены
формулы для элементов мат­
рицы (9.92), записанные через
Рис. 9.18
тригонометрические функции
и степенные ряды. В той же
таблице даны значения этих коэффициентов при a ^ - 0 , r ^ - cr> и
ra ^ - s, которые соответствуют прямолинейному стержню (рис.
9.17, а).
386
ы*
T а б л и ц а 9. 4
Круговой стержень
Переме­
щения
Через тригонометрические функции
fiu
^ y ( a - 2 s i n a + Px) +
$ ia = $ 2i
^
<L ^у _ t + hc cooss aa +
4 - ^ 2i f JW
- Si”22K
EJ
+ Ер
r2
$13 — $31 ^ry (а — sin а)
$22
Г3Р2 ■ r f 2
£ / ^"^r
Г2
$23 — $32 ^ J (— 1 + cos
$33
Через ряды
r (
EF Va
а 3\
3 j
т г.З
2 EF
ra
n
a
sin 2a
P2 = y -------- 4— -
s
EF
0
0
r3a3
ra3
W T + ^EF
53
3 EJ
ra
тт
а . c iri 2a
2"4------ 4— I
рнс. 9.17, а
г2а3
6EJ
г2а2
2EJ
а)
~ш
n
где P i =
Прямолинейный стержень
S2
2EJ
S
EJ
рис. 9 . 18, б
8r3 . - а . 2 r
s а
9 а
S m T + £ 7 S ln 2 COST
W
__
8 г 3 -3 EJ
. , а
2
а . 2r .
2 + EF
а
n < t li ___ Л A n ___ 1 _____ P1f4 0
6 ___
0а
2r2
f 7 sinT
8г2 . , а
„ а . 2г
. , а
3 ¥ S U , 2 C0 S 2 + f f S m y
2г2 . «, а
а
Y cos У
~~Ё 7
2r . а
f 7 sinY
2
Г*л
О
а
2
T а б л и ц а 9.5
Номера
точек
#
n= 1 2
К руг
1
2
3
4
5
6
7
8
9
10
11
12
13
—66,7107
— 53,6920
— 14,1018
50,5386
137,7449
49,0757
—99,3119
49
—74,9507
—22,3343
104,7704
24
—16,9713
—57,8579
—72,0130
— 58.8924
— 19,0004
46,1299
133,9957
>
— 105,3610
100,4930
46
25
129,5213
<
%
12
58
6
—25,1862
48
—80,2203
11
—27,2027
43
125,7951
6
V
n= 24
—68,7744
—55,7536
— 16,1611
48,4818
135,6907
47,0241
— 19,0204
—59,9048
—74,0578
—60,9355
—21,0423
44,0888
131,9548
о
%
3
4
15
4
1
4
12
4
3
3
11
4
2
n=z 48
—67,2268
—54,2076
— 14,6167
50,0244
137,2315
48,5630
— 17,4833
—58,3693
—72,5237
—59,4027
— 19,5104
45,6202
133,4860
%
1
1
4
1
0,3
1
3
1
1
1
3
1
0,4
Построим формулы для элементов матрицы b (9.92) при замене
кругового очертания стержня прямолинейным (рис. 9.17, б). На
рис. 9.17, в, г построены единичные эпюры моментов и нормальных
сил от N = 1, Q— 1 и M = l . Перемножая эти эпюры, получим коэф­
фициенты матрицы b для прямолинейного стержня, приведенные
в табл. 9.4.
Далее для получения матриц реакций используется формула
(9.47).
При расчете конструкций, содержащих криволинейные стерж­
ни, последние часто заменяют вписанным многоугольником. В табл.
9.5 приведены результаты расчета кругового стержня с заделка­
ми по концам с использованием матриц жесткости для кругового и
прямолинейного стержней. При использовании прямолинейного
стержня круговой стержень с защемленными концами заменялся
правильным ft-угольником при числе сторон n = 6 , 12, 24, 48; там
же указаны проценты расхождения. Исходные данные для табл. 9.5:
P = 1 кН, F = 3 ,4 -10~ 4 м2, r= 1 м, E = 2* 105 МПа, У=85-10~8 м4.
На рис. 9.18 изображены три жестко связанных кольца. Кольца
загружены силой Р = 1 к Н , r = 1 м, £ = 2 * 1 0 5 МПа, F=3,4*10 - 4 м2,
7= 85- 1 0 ~8 м4. На том же рисунке показана эпюра моментов в коль­
цах, ординаты эпюры моментов указаны в кН-м.
§ 9.5. ОПИСАНИЕ УЧЕБНОГО КОМПЛЕКСА
ПО РАСЧЕТУ СТЕРЖНЕВЫХ СИСТЕМ.
ВНУТРЕННЕЕ И ВНЕШНЕЕ ПРЕДСТАВЛЕНИЕ ИСХОДНЫХ
ДАННЫХ. БЛОК-СХЕМА КОМПЛЕКСА ПО РАСЧЕТУ
СТЕРЖНЕВЫХ СИСТЕМ
На рис. 9.19 приведены методы строительной механики и соот­
ветствующие им системы линейных уравнений, записанные в мат­
ричной форме. Матрицы систем могут быть легко построены с ис­
пользованием программ линейной алгебры. На том же рисунке
приведена исходная информация для составления соответствующей
системы линейных алгебраических уравнений. В качестве исходной
информации выступают либо матрицы, либо векторы. Эти матрицы
предварительно составляются вручную. Таким образом, содержа­
тельная часть (составление исходных матриц) выполняется студен­
тами, а механическая (арифметические операции) — ЭВМ.
Исходные матрицы А и В имеют высокий порядок и являются
мало заполненными. Причем, матрица А является хаотической,
а матрица В — квазидиагональной. При организации ввода матри­
цы В можно использовать ее квазидиагональность и вводить только
блоки, расположенные на диагонали, отличные от нуля. При вводе
матрицы А можно вводить только элементы, отличные от нуля, и
номера строк и столбцов, где они расположены, или номер строки и
столбца первого элемента, отличного от нуля, и расстояние до сле­
дующего элемента, отличного от нуля. При втором подходе коли­
чество информации меньше, но она менее наглядна, чем при первом
варианте. Комплекс может быть построен в диалоговом режиме, при
389
использовании которого студент может выбирать метод расчета.
Ввод матриц может также быть организован в диалоговом режиме.
Если пользователь не знает, как вводится та или иная матрица, то
используется кнопка «помощь» и на экране дисплея высвечивается
соответствующая часть инструкции, поясняющая этот процесс.
B S + A TZ + A ' « 0
AS
+P - 0
L \ B L x l * L \ B L , p %t f l + E ; - 0
Lp ~LXK + L0p
\
A , B , P , j ' _______
BSod
t
.
Сучетом деформации от продольных
r
^
Й
Вбод L^ , Bf L Cp j A s , & х_______
сил
Вез учета деформаций от продольных сил
^
LT. AB-1A rL.Z, + L r,АВ’
й'+ Ц P =0
AB4 A rZ+AB~1f д +я -a
S - B~!A TZ
)
k
s=eWL,z,
J i
BSod A, B, P, 1 '
~ ^ \у ш
^
i
Построение A ,8
хН’ Ун \узла j_ _ Хк>Ук
Внешнее предстабление
Та5л. 1 ,
ВШ A,B,J',P и Lj
EF,E3
Та5л. Z
Рис. 9.19
Описанный комплекс позволяет рассчитывать стержневые сис­
темы с малым числом стержней, так как при расчете систем с боль­
шим числом стержней получается слишком большое количество ис­
ходной информации. Целью этого комплекса является не расчет
сложных стержневых систем, а усвоение методов строительной
механики.
Как указывалось выше, наиболее удобным с точки зрения ЭВМ
является метод перемещений (при применении этого метода система
уравнений получается меньшей, чем при использовании смешанного
метода, и не требуется логически сложная процедура построения
единичных и грузовых эпюр, как это имеет место в методе сил). Для
расчета стержневых систем с большим количеством стержней необ­
ходимо автоматизировать процесс построения матриц А и В . При
этом используется поэлементный подход. Для применения поэле­
ментного подхода необходимо исходную информацию сгруппиро­
вать по элементам. Поэлементную информацию можно представить
в виде
390
к
Тип
узла
1
Tun
узла
х н, Ун
Информация
o5 узле L'
j
*к. Ук
EF, EJ
Информация
00 узле j
где k — номер элемента; i — глобальный номер, с которым совпа­
дает начало k-то стержня (н); Х н, Y H— координаты i-го узла; / —
глобальный номер, с которым совпадает конец k-ro стержня (к);
X K9 Y K— координаты /-ro узла; тип узла — жесткий узел, шарнир­
ный узел, узел присоединения системы к земле (защемление, шар­
нирно-неподвижная или подвижная опора).
T а б л и ц а 9.6
Координаты
Номера
узлов
Тип
узла
X
Y
1
2
3
4
5
Снлы и связи
р*
Д*=0
лЙ о
м
Ф= о
Plx
рч
by = 0
Мг
ф= 0
Ал' = 0
Дл' = 0
At/ — 0
Ay = 0
По исходной информации с использованием формул, приведен­
ных в предыдущем параграфе, можно построить матрицы Л и В .
Описанное представление исходной информации называется
внутримашинным и удобно при использовании ее машиной, но оно
не оптимально с точки зрения ввода. Основное требование к вводи­
мой информации — ее минимум. Большинство ошибок при решении
практических задач происходит из-за неправильного задания ис­
ходных данных, поэтому чем их меньше, тем меньше вероятность
ошибок. Из одного и того же узла могут выходить несколько эле­
ментов, поэтому информация об узлах будет повторяться. Помимо
внутримашинного представления имеется внешнее представление
исходной информации. Любая стержневая система состоит из узлов
и стержней. В соответствии с этим и информация состоит из поузловой и поэлементной информации. Исходные данные о системе
можно представить в виде двух таблиц: поузловой информации
(табл. 9.6) и поэлементной информации (табл. 9.7).
T а б л и ц а 9.7
Н ом ера
стержней
Номер узла
«н»
Номер узла
«к»
EF
EJ
Д'
1
2
391
Если все связи конструкции с землей абсолютно жесткие, то
можно совместить информацию о силовом загружении и информа­
цию об опорных закреплениях (по направлению абсолютно жесткой
связи бессмысленно прикладывать силу). В соответствии с заполне­
нием табл. 9.6 в первом узле имеется загружение силами P lx, Р иг
М ь второй узел является
/ | Мод
заделкой, третий — шар­
нирно-неподвижной
опо­
_______
jf f l
__________
рой,
четвертый
—
шарнир­
Построение матрицы жесткости 6 мест­
2 ной нумерации и шальной системе
но-подвижной опорой.
Г кооооинат______________
Внешнее представление
1 (2)
по специальной программе
flepe8od
матрицы
из
локальной
системы
3
перерабатывается во внут­
координат в глобальную
реннее, далее расчет ведет­
_____________ „Ш _____________
ся по методу перемещений.
Описанный учебный прог­
4 Формирование полной матрицы реакций
раммный комплекс может
быть широко использован
i*-n
студентами для расчета
плоских стержневых ; сис­
тем
в курсовом и диплом­
15) 1 i=rn
ном проектировании.
Учет граничных услодий
В настоящее время все
большее практическое зна­
чение приобретают нели­
Решение системы алгеЬраических уравнений
нейные задачи (без ЭВМ ре­
(П
шение этих задач было не­
возможно). При их решении
дьтсление усилий 5 элементах
используются комплексы
(8)
для решения линейных за­
дач, но процесс расчета ве^ГЦикл по
ь\злементам\
дется с помощью метода ите­
раций. При этом информа­
(9j$i =m
ция может меняться в про­
10
цессе счета. Поэтому внуРис. 9.20
тримашинную информацию
можно делить на постоян­
ную и переменную. В следующем параграфе рассматриваются два
вида нелинейностей — геометрическая и физическая. При учете
геометрической нелинейности расчет ведется с учетом деформаций
системы, поэтому в процессе счета будут меняться координаты (пе­
ременная информация), а при учете физической нелинейности (не
справедлив закон Гука) в зависимости от результатов предыдущего
счета меняется модуль упругости E , а следовательно, и жесткости
E J и EF (переменная информация).
Остановимся кратко на особенностях промышленных комплексов
и организации исходных данных для них.
На рис. 9.20 показана укрупненная блок-схема программы рас­
чета стержневых систем. Каждый из блоков является самостоятель­
392
ным ивыполняет определенную функцию. Совокупность блоков и
описание их функций носит название функциональной схемы про­
граммы. Весь процесс расчета стержневой системы происходит по
схеме:
Анализ------------- ►Синтез--------------►Анализ
На первом этапе (анализ) система «разбирается» по элементам и
строятся матрицы для отдельных элементов, далее производится
«сборка» матрицы конструкции (синтез), решается система линей­
ных уравнений, в результате чего определяются перемещения, а за­
тем система вновь разбирается по элементам (анализ) и определя­
ются усилия в отдельных элементах. На этапах анализа исполь­
зуется местная нумерация и локальная система координат, а на
этапе синтеза — общая нумерация и глобальная система координат.
Блоки можно разделить: на сервисные— 1, 10; арифметические —
2, 3, 4, 6 , 7, 8 и логические — 5, 9. Остановимся на функциях каж­
дого из блоков.
Б л о к 1 — ввод. Исходную информацию можно разделить на
информацию о загружении и информацию о системе. Загружение
—
>
—
>
бывает силовым P и деформационным A'. Информацию о системе
можно разделить на:
1 ) геометрическую (координаты узлов);
2 ) топологическую (указывающую, какой узел с каким узлом
связан);
3) физцческую (EF, EJ).
В силу стандартизации и унификации большинство конструкций
имеет регулярную структуру. Остановимся на внешнем представле­
нии исходной информации. К внешнему представлению исходной
информации предъявляются два требования: компактность и наг­
лядность. Для свертывания геометрической и топологической ин­
формаций используются повторители, которые могут быть одно­
мерными, двухмерными или трехмерными. Например, вводится
ферма с одинаковыми длинами панелей, тогда вместо координат
узлов можно указать координаты первого узла, шаг и количество
панелей (повторителей). Если в ЭВМ необходимо ввести раму с
одинаковыми пролетами и высотами, то можно ввести координаты
первого узла, шаг по оси X и количество пролетов, шаг по оси Y
и количество этажей (двухмерный повторитель). Можно исполь­
зовать повторители не только на ортогональной, но и на круговой,
эллиптической и других сетках. Повторители могут быть исполь­
зованы и для свертывания топологической информации.
Для ввода координат сложных нерегулярных систем можно ис­
пользовать специальное устройство, носящее название дигитайзера
или сколки. На стол дигитайзера накладывается чертеж конструк­
ции, координаты которой необходимо занести в ЭВМ. Далее на
точку, координаты которой надо занести в ЭВМ, накладывается пе­
рекрестье увеличительного стекла и после соответствующей коман­
ды координаты точки вводятся в ЭВМ. Далее аналогично поступают
с координатами следующей точки и т. д.
393
Далее остановимся на вводе физической информации (EF, EJ).
Большинство элементов конструкций имеют одинаковые поперечные
сечения, которые можно разделить на типы. Количество типов
значительно меньше, чем количество элементов, поэтому в ЭВМ
вводятся жесткости типов поперечных сечений, а у каждого эле­
мента указывается только его тип.
Наконец, во внешнем представлении исходных данных широко
используется принцип «по умолчанию»; если какая-либо информа­
ция нулевая, то она опускается.
Блок ввода развертывает исходную информацию во внутримашинное представлениедВ функцию этого блока входит диагностика
ошибок. Если машина снабжена графическим дисплеем, то по гео­
метрической и топологической информациям можно получить гра­
фическое изображение конструкции (рис. 9.21).
Рис. 9.21
В больших комплексах не используют матрицы А у при этом
снимается ограничение по количеству стержней и процесс форми­
рования матрицы реакций для ансамбля проводится с использова­
нием матриц жесткости для отдельных стержней.
Б л о к 2 по геометрической и физической информациям строит
матрицу жесткости в локальной нумерации и локальной системе
координат, связанной со стержнем.
В л о к 3 по геометрической информации строит матрицу на­
правляющих конусов и производит перевод матрицы реакций для
стержня из локальной системы координат в глобальную.
Б л о к 4 формирования матрицы реакций в соответствии с то­
пологической информацией расставляет блоки матрицы реакций
394
стержней в общую матрицу реакций. После построения полной
матрицы реакций производится учет граничных условий с исполь­
зованием б л о к а 6 . Б л о к 7 — решение системы алгебраиче­
ских уравнений. При использовании метода перемещений матрица
системы имеет слабо заполненную структуру. Для решения системы
используется метод Гаусса. При этом матрица раскладывается в про­
изведение трех матриц (см. § 13.4). Для сокращения объема памяти
хранится только одна треугольная матрица, при этом на месте еди­
ниц треугольной матрицы хранятся элементы диагональной матри­
цы. Как показано в § 13.4, при прямом ходе по Гауссу(разложении
матрицы в произведение трех матриц) цифрами заполняются только
клетки, стоящие под нену­
левыми элементами. Поэто­
му структура треугольной
матрицы вниз по столбцам
остается такой же, что и у
исходной матрицы.
Для решения системы в
памяти ЭВМ можно отво­
дить ленту, ширина которой
равна максимальному коли­
честву элементов по строке
от диагонального элемента до первого ненулевого элемента. По­
добное хранение носит название ленточного хранения (рис. 9.22, а).
Более совершенным является «небоскребное» хранение (рис. 9.22, б),
при котором в памяти ЭВМ отводится массив, равный числу эле­
ментов под ненулевыми элементами. Но подобное хранение услож­
няет программу. Поэтому иногда используют ленточное хранение,
а обработку элементов ведут по «небоскребу», обходя нулевые
элементы, при этом резко сокращается время работы программы.
Использование разложения в три матрицы позволяет оптимально
решать задачи, в которых матрица системы остается однойитойже,
а меняется только столбец грузовых членов. При этом процесс раз­
ложения матрицы системы проводится один раз, далее делается
прямой ход по новому грузовому столбцу и обратный ход по Гауссу.
Обратим внимание на то, что использование обратной матрицы при
этом не рационально, так как матрица, обратная к мало заполнен­
ной, является полностью заполненной.
Качество программного комплекса зависит от качества програм­
мы решения системы линейных уравнений. При решениизадач с
системой уравнений большой размерности для хранения матрицы
системы используется внешняя память ЭВМ и процесс разложения
матрицы проводится по порциям. Естественно, алгоритм при этом
резко усложняется. Время решения задачи во многомзависит от
времени решения системы уравнений, поэтому программа решения
системы уравнений пишется в машинных кодах (на языке АССЕМБ­
ЛЕР).
Б л о к 8 производит вычисление усилий в элементах по найден­
ным из системы уравнений перемещениям.
395
Б л о к 10 осуществляет вывод результатов либо в табличной
форме с использованием алфавитно-цифрового печатающего уст­
ройства, либо на графопостроителе в виде схемы с нанесенными на
них эпюрами или линиями влияния при расчете конструкций на
подвижную нагрузку (рис. 9.23). Чертеж желательно выдавать
первоначально на графический дисплей и после его анализа запро­
токолировать его на графопостроителе. Графопостроитель работает
более медленно, чем графический дисплей, и работа на нем часто
ведется автономно от машины. С машины информация пишется на
ленту, которая ставится на лентопротяжку графопостроителя и на
графопостроителе выдается чертеж.
Рис. 9.23
Логические б л о к и 5, 9, помеченные на блок-схеме ромбами,
произЕодят проверку на исчерпание элементов при формировании
матрицы и вычислении усилий.
Каждый из блоков блок-схемы, изображенной на рис. 9.20,
имеет вход, на который подается исходная информация (стрелка
сверху), и выход, на который подается результат работы блока для
передачи ее следующему блоку (стрелка внизу). Например, стрелка
(3) означает входную информацию для блока 4 (в качестве исходной
информации используется матрица реакций в глобальной системе
координат и тОпология), стрелка (4) — выходную информацию из
блока 4 (доля полной матрицы реакций за счет z-го стержня); эта
информация складывается с предыдущей, в результате чего полу­
чается полная матрица реакций для стержневого ансамбля. Сово­
купность стрелок и описание соответствующей им информации со­
ставляет информационную схему.
Г л а в a 10
УЧЕТ ГЕОМЕТРИЧЕСКОЙ И ФИЗИЧЕСКОЙ
НЕЛИНЕЙНОСТИ ПРИ РАСЧЕТЕ СТЕРЖНЕВЫХ
СИСТЕМ
§ 10.1. ОБЩИЕ ЗАМЕЧАНИЯ
До настоящей главы рассматривались линейные задачи, в кото­
рых усилия и перемещения линейно зависели от внешней нагрузки.
Программные комплексы для решения линейных задач могут с успе­
хом использоваться и для решения нелинейных задач. При этом
процесс решения проводится по методу итераций (последовательных
приближений). Первоначально рассматриваются геометрически не­
линейные задачи, в которых нелинейность порождается измене­
нием геометрии стержневой системы при ее деформировании. Стро­
ятся две дополнительные матрицы, одна из которых учитывает
изменение положения узлов стержневой системы, а вторая — нали­
чие усилий в стержнях на предыдущей итерации. Исследуются воп­
росы устойчивости найденных положений равновесия. При этом
рассматриваются вопросы как потери устойчивости всей системы
в целом (общая потеря устойчивости), так и отдельных ее стержней
(местная потеря устойчивости).
При расчете стержневых систем с учетом физической нелиней­
ности предполагается, что материал системы подчиняется диаграмме
Прандтля, которая является наиболее распространенной моделью
физически нелинейного материала. Основное внимание в параграфе
уделено прямому методу расчета, так как этот подход позволяет
проследить всю историю работы конструкции, если известна ис­
тория ее загружения. Кроме того, при его использовании нет не­
обходимости в построении нового математического аппарата, а ис­
пользуется обычный линейный аппарат строительной механики,
рассмотренный выше. Недостатком этого подхода является большое
количество арифметических операций, однако при использовании
ЭВМ для не слишком сложных систем это препятствие легко устра­
няется. Применение прямого метода расчета упругопластических
систем тесно связано с использованием ЭВМ.
Для расчета более сложных систем в упругопластической стадии
можно использовать методы математического программирования,
при применении которых задача ставится в более широком плане.
Ввиду ограниченности объема на этих методах останавливаться не
будем, желающие ознакомиться с ними могут получить необходи­
мую информацию из работы А. А. Чираса х.
1 См.: ЧирасА. А. Методы линейного программирования при расчете упруго­
пластических систем. JI., 1969,
397
§ 10.2. РАСЧЕТ СТЕРЖНЕВЫХ СИСТЕМ
С УЧЕТОМ ГЕОМЕТРИЧЕСКОЙ НЕЛИНЕЙНОСТИ
Рассмотрим случай, когда перемещения являются большими,
а деформации — малыми (этот случай наиболее интересен для стерж­
невых систем); при этом будем считать, что закон Гука является
справедливым. При решении этих задач уравнения равновесия
надо составлять для деформированного состояния. В этом случае
уравнения равновесия в матричной форме для стержневой системы
будут иметь вид
A(Z)S = P.
(10.1)
В отличие от уравнений равновесия при решении линейных
задач (см. § 8 . 2 ) матрица уравнений ( 1 0 . 1 ) зависит от перемеще­
ний. Предположим, что стержневая система находится в равно­
весии в деформированном состоянии. Зададим этой системе воз­
можные перемещения относительно деформированного состояния.
^
Обозначим эти перемещения dZ. Этим возможным перемещениям
—
>
соответствует вектор деформаций dA. Ввиду малости возможных
перемещений можно записать
dA = А г (Z) dZ.
(10.2)
Система в деформированном состоянии находится в равновесии,
следовательно, сумма работ всех сил на возможных перемещениях
должна быть равна нулю:
Р тdZ—5 TdA = 0.
(10.3)
~>
Поясним минус в выражении (10.3). Вектор S характеризует
силы, действующие на стержни; эти силы являются внутренними
по отношению ко всей системе и внешними по отношению к стержню.
При использовании принципа возможных перемещений необходимо
учитывать внутренние силы, действующие в стержнях, а эти силы
^
противоположны силам, характеризуемым вектором S.
—
>
~>
Подставляя в (10.3) значение вектора P по (10.1) и вектора с1А
по ( 1 0 .2 ), получим
S M T(Z) d Z - 5 M i (Z) dZ = 0
или
S M T(Z) dZ = S M , (Z) dZ.
(10.4)
—>■
Равенство (10.4) соблюдается при любом векторе dZ. Отсюда
A ,(Z ) = A*(Z).
(10.5)
Подставляя (10.5) в (10.2), получим геометрические уравнения
Ar(Z) dZ = dA.
398
(10.6)
Дополняя уравнения ( 1 0 . 1 ) и ( 1 0 .6 ) законом Гука, получим полйую систему линейных уравнений строительной механики для
решения геометрически нелинейных задач
A(Z)J==P; _^
Л т (Z) d Z = dA;
A = BS.
(10.7)
Остановимся далее на решении системыуравнений(10.7) мето­
дом Ньютона — Рафсона. Если в первое уравнение (10.7) подста—
>
~^вить вектор 5, соответствующий вектору Z, то получим вектор
невязки или вектор неуравновешенных сил (в случае, если вектор
—
>
перемещений Z не является истинным). Этот вектор будет функ—
^
цией от Z:
V(Z) = A ( Z ) S - P .
(10.8)
~>
В качестве n-го приближения примем вектор Zn. Разложим функ~> —
>
~>
цию W (Z) в ряд Тейлора в окрестности точки Zn и ограничимся
одним членом разложения
¥ (ZJ + d\ iz'‘] д Zn = 0.
(10.9)
dZn
При получении выражения (10.9) предполагалось, что силы по­
стоянны как по числовой величине, так и по направлению. Ре­
шая систему (10.9), получим
dV (Zn)
AZ„
'n = —
-i
Y (Z J .
(10.10)
dZ
Для получения (rt+ l)-ro приближения используем формулу
Z„ + 1 = Z„ + AZ„.
д Ф (Z )
М атрица---- rr^-
выражения
(10.9)
носит
(1 0 . 1 1 )
название
матрицы
dZ
Якоби или касательной матрицы жесткости. Используя общую
систему уравнений (10.7), построим касательную матрицу. Вычис■
—^ —v
лим дифференциал функции *F(Z) (10.8):
dW (Z) - dA (Z) S + A (Z) dS.
(10.12)
Как указывалось выше, в данном параграфе рассматриваются
малые деформации и считается справедливым законГука, поэтому
матрица В (10.7) постоянная и можно записать
dA = В dS.
(10.13)
399
Подставляя (10.13) во второе уравнение (10.7) и решая полу—>►
ченное уравнение относительно dS, получим
dS = DA* (Z) dZ,
(10.14)
где D = B - 1.
Подставив (10.14) в (10.12), получим
dY (Z) = dA (!) S + A (Z) D A T(Z) dZ.
(10.15)
Введем обозначение
K,(Z) = A (Z )D A '(Z )—>
—>
(10.16)
'—^
В выражение dA ( Z ) S линейно входят дифференциалы dZ. По­
этому это выражение можно представить в виде
dA (Z) S = К 2 (5) dZ.
~>
~>
(10.17)
~> ~^У
Подставляя в (10.17) Z = Z„, S = S n и результат в (10.15), получим
d Y (Z J = ^ ( Z j d Z + tfs (S J d Z
или
^ ->
—
>•
^
<№(Zn) = к
dZ„
(10.18)
где К т= К г (Z J + К 2(S n) — касательная матрица.
Тогда выражение (10.10) примет вид
AZn = - K ^ { Z n).
(10.19)
—
>
Матрица K 1 (Z) учитывает изменение геометрии при переходе от
итерации к итерации. В случае, если начальное приближение для
метода Ньютона резко отличается от окончательного, стержни
могут изменять свои длины. При этом в матрицу Z), которая
входит в состав матрицы
К г (Z )= A (Z )D A '(Z ),
нужно подставить исходную длину до деформации, а не длину,
найденную по новым координатам. Игнорирование этого обсто­
ятельства может ухудшить сходимость и даже привести к pacxo■
—^
димости итерационного процесса. Матрица K 2 (S) учитывает нали­
чие усилий в элементах при переходе от итерации к итерации.
Итерационный процесс ведем до тех пор, пока не получим
~> —
>
^
maxAZn^ e для некоторого заранее заданного e. Величины уси­
лий и невязки на каждом шаге итерационного процесса опреде­
ляют, исходя из точных соотношений.
■
—^
При использовании метода Ньютона — Рафсона матрица K r(Zn)
меняется от шага к шагу. Эта операция требует значительных за400
'"ТЩ Щ Щ Щ ^&ъЯ^
\*^
.<
\
трат машинного времени. Можно эту матрицу сохранять поетояйной
в процессе итераций. Количество итераций при этом возрастает,
но время одной итерации падает. Этот метод носит название моди­
фицированного метода Ньютона — Рафсона. На рис. 10.1,a, б
показаны графики процессов последовательных приближений соот­
ветственно по обоим методам для случая системы с одной степенью
свободы.
Рис. 10.1
При решении практических задач в качестве начального при­
ближения обычно используется линейное решение. Если в конструк­
ции происходят значительные перемещения и ее деформированное
состояние резко отличается от исходного, то описанные выше ме­
тоды могут либо привести к большим затратам машинного времени,
либо вовсе не привести к решению. В этом случае можно использо­
вать метод последовательных нагружений. Рассмотрим этот метод.
Уравнения равновесия запишем в виде
A ( Z ) - l P = 0,
(10.20)
—
>
где P —окончательное значение нагрузки; %—параметр нагрузки
(0 < ^ < 1).
—
>*
Нагрузка P делится на порции путем последовательного за­
дания параметра X. Предположим, что при параметре, равном Хп>
—
^*
перемещения равны Z„. Тогда
Y(Z„, K ) = A ( Z n) S n- X nP.
( 10.21)
При K + i - K + ^ K перемещения равны Zn+1 — Zn + AZn. Линеа­
ризуем уравнение (10.21) путем разложения его в ряд Тейлора
401
~r
в точке Zn, Ял:
W(Zn +AZ„, K + A K ) = $ ( t , K ) + dJLJ^ A Z n- P A K dZ
(10.22)
s**
Подставляя W(Z„, ^„) = 0 и ^ ( ^ „ + Д ^ , Ял + Д^п) = 0 (невязка
на каждом шаге равна нулю) в ( 1 0 .2 2 ), получим
^ lA Z = P A K ,
(10.23)
dZ
где
^(Z ^ )_=
_ К т(Zn) —касательная матрица жесткости та же, что и
dZ
в методе Ньютона — Рафсона.
Решая (10.23), будем иметь:
AZn = [KT(Z„)]-'AbnP;
(10.24)
^
^
Z „ - S A Z n\
(10.25)
1= 1
(10.26)
A%n “ ^л+l ^л*
При использовании метода последовательных нагружений зада­
емся шагом по нагрузке (АЯП) и далее по формулам (10.24) — (10.26)
определяем последовательные значения Z„. На рис. 1 0 . 1 , в показан
процесс метода последовательных нагружений для системы с одной
степенью свободы. При решении практических задач можно комби*нировать описанные выше методы. Например, на рис. 1 0 . 1 , 2 сде­
лано два шага по нагрузке и далее использован метод Ньютона —
Рафсона. Комплекс по решению нелинейных задач должен быть
диалоговым, что позволит чередовать эти методы в зависимости от
получаемых результатов и резко сокращать время решения задачи.
402
Наконец, могут встретиться такие задачи, в которых получение
решения без диалога практически невозможно.
Построим далее касательные матрицы, используя поэлементный
подход. Построим касательную матрицу для отдельного стержня,
имеющего по концам шарниры. На рис. 1 0 . 2 изображен стержень
в недеформированном (н, к) и деформированном (нь кг) состояниях.
В деформированном состоянии стержень остается прямолинейным,
так как он имеет по концам шарниры и нагрузка является узловой.
В соответствии с рис. 10.2 имеем
rHX= — N cos ф, rK
к*X— N соэф;
(10.27)
r * y = - N sin Ф, rKy = N эшф
или в матричной форме
HX
Гnx
‘ — COS ф "
— sin
Г*У
?кх
~гку-
ф
СОЗф
sin
N = a(z)N ,
(10.28)
ф_
где
Ду
t+Au
cos Ф~ 1ЦГ£1 ’> ЗШФ
l+ M'
(10.29)
Здесь
(10.30)
Аи = ик — ин, A^ = vK— vH.
Продемонстрируем принцип двойственности. По теореме Пифагора
имеем (рис. 1 0 . 2 )
72 = (/ + Al f = (1 + Au f + А Л
(10.31)
Возьмем дифференциал от обеих частей выражения (10.31)
2 (/ + A/) d А/ = 2 (/ + Аи) d Аи + 2Av d Av,
откуда
d Л/ = г р ж d Аы + 7T T /d Ay = F & J (d“K— d“H) + W E i (cb“— dl^
или в матричной форме
d«„
do*
Av
Ли
/ + Лм
d A /= [
' +А “
l + Al
l+ M
/ + Л/
/ + Л /. d«K
A j
ИЛИ
dA/ = a T(e) dz.
(10.32)
Полная система уравнений строительной механики для шарнир­
ного стержня имеет вид
—У
—У
r = a(z)N;
\
!
В соответствии с формулой (10.16)
(10.34)
К ( ? ) = ^ а ( 2 ) а т (2 ).
Подставляя a(z) (10.28) в (10.34), получим
* i( * ) = 4 ^
"
x
COS2 ф
s in ф cos ф — cos2 ф
s i n ф cos ф
s in 2ф
— s i n ф cos ф
— зтф соэф ~
— s in 2 ф
— cos2ф
— s i n ф cos ф
cos2ф
s in ф c o s ф
— ЗШ фСОЗ ф
— s in 2 ф
s in ф cos ф
s in 2 ф
(10.35)
Построим матрицу k.^(N) [см. (10.17)]:
(10.36)
da (z) N = k 2 {N) d 2 ,
где
* -d c o sc p
— dsin ф
da(z) =
dcosф
d s ir ^ _
(10.37)
Вычислим дифференциалы от тригонометрических
с использованием выражений (10.29) и (10.32)
А т ~ rr -
функций
, \ 1 + Аи - d A“ ( l + M ) - V + M d Д/
a c o s 9 - a j q ^ - -------------- (/+A0*
= j- f d ик—йын— совф (— cosф d«н— sinф dyн +
+ cos ф duK+ sin ф di<K)] = i [ — sin 2 ф duH+ sin ф cos ф doH+
/
+ s i n ^ d « K— sinфcosфdt>к]. (10.38)
Аналогично,
d sin ф = 4г[siп ф cosф dн н—c o s ^ d y H— эшфсоэф^ы* + c o s ^ d u J .
(10.39)
Подставляя выражения (10.38), (10.39) в (10.36), получим
* ,W = j X
“
X
s in 2 ф
— s in ф с о з ф
— s in 2 ф
З Ш ф С О З ф"
— s i n ф cos ф
cos2 ф
s i n ф cos ф
— cos2 ф
— s in 2 ф
s in ф с о з ф
s in 2 ф
— s in ф c o s ф
этфсоэф
— cos2 ф
— s in ф cos ф
COS2 ф
(10.40)
~~У
Матрицы kx(z) (10.35) и k^(N) (10.40) записаны в системе
координат, связанной со стержнем в недеформированном состоя404
/
нии (оси X , Y , см. рис. 1 0 .2 ). Наиболее простоэти матрицы
выглядят в местной системе координат, связанной со стержнем
в деформированном состоянии (оси X, Y , см. рис. 10.2).
Для построения матриц k x(z) и k.z (N) в местной системе
координат подставим в формулы (10.35) и (10.40) ср — 0. Получим
-
>^Л
EF
- 1 0 —1 0о 0 0 0
(10.41)
—1 0 1 0
0 0 0 0_
0 0"
Г°о 0
10 --1
Л2 (ЛГ)=Д 0
un 0 0
0 —1 0 1
К (2 ) = —
(10.42)
Матрица k x{z) —■обычная матрица жесткости для шарнирного
стержня в местной системе координат, связанной со стержнем в де­
формированном состоянии. Действительно, полагая в матрице
(9.48) E J = 0 и выбрасывая третью и шестую строки и столбцы (соот­
ветствующие углам поворота фн и срк), получим матрицу, совпадаю*
~~^
щую с (10.41). Таким образом, элементами матрицы k r(z) являются
дополнительные реакции за
счет изменения геометрии
при переходе от шага к
шагу.
Поясним смысл матри­
цы k 2{N). Как указывалось
выше, эта матрица учитыва­
ет дополнительные реак­
ции, возникающие за счет
наличия нормальной силы
Iйи I
1
\'7*ку
при переходе от итерации к
^
г
итерации. На рис. 10,3, а
I
ц i ^*^^* ^
показана предварительно
i
^e0*
натянутая силой N струна.
|
^ - ^ о 5 и \ %* "
й\
—
I
Очевидно, что при отклоне­
'HX i ^
нии на Av за счет сил N бу­
пг
L - .?. . K
дет возникать реакция,
Рис. 10.3
стремящаяся вернуть ее в
исходное положение. Это
явление носит название «струнного эффекта». Очевидно, что пред­
варительно напряженный стержень, имеющий по концам шарниры,
будет работать так же, как и струна. Дополнительные реакции, воз­
никающие за счет«струнного эффекта», и составляютэлементы матри­
цы k 2{N). На рис. 10.3, б,в изображен стержень в деформированном
состоянии при малых смещениях его концов на A vH и AvK. В соотj
-
.
I
Л ^^^
I
^-
I-
405
ветствии с рис.
10.3, б имеем
л7
N1
EF'
л
Аи
^ = СОЗф.
N1
EF'
(10.43)
Подставляя два первых выражения (10.43) в третье, получим
N=—
.
COS Ф
(10.44)'
v
Определим горизонтальную и вертикальную составляющие силы
R (рис. 10.3, б):
rnx = N соэф, гН;; = М з т ф .
(10.45)
Подставляя (10.44) в (10.45), получим
N А~н
l + Al *
N tg ф
= N,
(10.46)
Запишем выражения для приращений реакций
A r ^ = N - N = 0,
NAv„
n _ NAi>a Ш
U
l + Al ’
ArHy = l + Al
(10.47)
NAvH
0 = ■ £ ^ .( 1 0 .4 8 )
АГку = — l + Al
Аналогичныевыраженияможно получить идля AvK (рис. 10.3,ff):
ArKX= N — N = 0,
д ; нл = N - N =
0,
А ? ., = -
^
-
о= -
N AvK
A~rKX= N - N = 0,
^
;
( 1
0 .4 9 )
N Адк
А}к„
0 =
«У = l + Al
~ " l + Al*
0 0 -50)
При перемещениях Аи н и Аи к приращения реакций равны нулю.
Итак, выпишем матрицу, связывающую приращение перемещений
—
►
Az с приращением реакций.
T а б л и ц а 10.1
Реакции
А"н
А%
A^н*
0
0
0
Аг„у
0
N
l + Al
0
~~Г+К1
&гкх
0
0
0
0
^
Агку
0
Ч
N
~Т+Ы
0
А~к
0
N
N
Г+JF
Матрица, приведенная в табл. 10.1, полностью совпадает с матрицей
k 2(N) (10.42). Элементами матрицый2(АО являются дополнительные
реакции, возникающие за счет предварительного натяжения (сжа­
тия) стержней.
Приведем примеры расчета стержневых систем с учетом геомет­
рической нелинейности.
406
Пример I. На рис. 10.4, а изображена простейшая ферма, которая носит название фермы Мизеса. Жесткость стержней EF= Ю7 H.
На рис. 10.4, б показан график прогиба в центральном шарнире в зависимости
от значения снлы. Последовательные положения шарнира, обозначенные на
рис. 10.4,амалыми буквами.соответствуют точкам, обозначен­
ным на графике (рис. 10.4, 6)
большими буквами. Процесс по­
ясним на графике; при этом под­
разумевается, что читатель про­
слеживает его и по рис. 10.4, а.
Первоначально на участке OA
система деформируется по мере
роста силы Р. Затем в точке А
происходит «перескок» до точки
В , еслн силу увеличивать далее,
то стержни начинают растягива­
ться и система деформируется по
мере роста нагрузки (участок ВС
на графике). Если силу умень­
шать, то при P = 0 ей будет соот­
ветствовать точка D, Далее при­
кладываем силу противополож­
ного знакадоточки £ ,в которой
происходит перескок в обратную
сторону. Уменьшая силу P, при­
водим систему в точку О. Описан­
ный процесс можно продемонс­
трировать на деформации крыш­
ки консервной банки» если она
имеет выпуклое очертание.
Используя построенные для
шарнирного стержня матрицы,
можно рассчитывать произволь­
ные деформируемые нити. Если исходное положение нити горизонтально,
то для борьбы с вырожденностью касательной матрицы на первом шаге
. итерационного процесса можно либо задать начальное натяжение Н0 или упругие
связи, которые устраняются
а)
на следующем шаге, либо за­
даться начальным вектором
перемещений.
Пример 2. На рис. 10.5, а
изображена предварительно
напряжеиная вантовая ферма.
Предварительное натяжение
tfo=100 кН. Модуль упру­
гости вант £= 200 ГПа. На
рис. 10.5, б, в прнведецы со­
ответственно вертикальные и
горизонтальные перемещения.
Цифрамн в скобках помечены
результаты (горизонтальные
перемещения не учитыва­
лись), полученные другим ме­
тодом 1
Рис. 10.5
1 См.: АлександровА. В .,
Лащеников Б . >7., Шапошни­
ков H. tf. Строительная меха­
ника. Тонкостенные простран­
ственные системы. М., 1983.
407
Построим далее касательную матрицу для стержня,, имеющего
по концам жесткие узлы. Аналогично шарнирному стержню для
построения касательной матрицы можно использовать полную сис­
тему уравнений строитель­
ной механики.Нарис.10.6
изображен стержень в недеформированном и дефор­
мированном
состояниях.
Как указывалось выше, пе­
ремещения считаются боль­
шими, а деформации малы­
ми (при составлении урав­
нений равновесия в дефор­
мированном состоянии буРис. 10.6
дем пренебрегать изгибными деформациями и считать
стержень прямолинейным). В соответствии с рис. 10.6 имеем
rHX= — N cos cp— Q sin ф, rKX= N cos ф + Q sin ф;
гн = — МэШф + фС05ф, rKy = N sin ф—Q cos ф;
(10.51)
л„п = — М н, r кф
^ ^ = M к»
где
М к-М п
1= 14- А/.
Q=
7
Запишем зависимости (10.51) в матричной форме
—>•
—> —
>
r — a (z) s,
(10.52)
где
r=
' H.V
COS ф
г»у
sin Ф
«Б.
_0______
а(г) =
^KX
COS ф
'rку
ЭШф
sin ф
Т ~
sin ф
COS ф
COS ф
1
1
1
*»
*»
— 1
0
sin ф ,
sin ф
7
7
COS ф
СОЗ ф
—
>
S-
1
Т~
т„ _
1 ^
L"lK
L «0
v0
(10.53)
Подставляя в формулу (10.52) ф = 0 , получим матрицу урав­
нений равноЕесия для осей, связанных с деформированным сос­
тоянием:
— 1
а
408
0
с
1 /Г
0
-i/7
0
— 1
0
1
0
0
0
i/7-
0
o
1 ii
1
(10.54)
Для построения матрицы kL(2) используем формулу [см. (10.16)]
EF_
1
0
0
kAz) =
0
0
12E J
6E J
/72
/7
6E J
4E J
/7
EF
1
0
0
0
0
12E J
6EJ
lI
2EJ
1
11
0
l2EJ
6E7
/72
/7
U
2EJ
1
0
0
J_2£7
6E J
6EJ
0
1
/f8
6E J
0
EF
1
W.
i
0
/72
Cl
/7
4EJ
1
6£7
0
— J
-
(10.55)
o
k l {z) = a{z)b~^a^{z).
Подставляя (10.54) и (9.37) в (10.55), получим
(10.56)
Построим матрицу Ar2 (s) [см. (10.17)]:
~> —
>
—
У
da (z)s = ft2 (s) dz.
Используя выражение (10.52), можно записать
^ sin Ф
d cos ф
— ~T~
d CQS(P
— d 5Шф
7
-* ->
0
0
d a (2)s =
d sin(p [ Мк —м н ] '
7
d sin Ф _ d CQS(p
1
(10.57)
— d созФ
0
0
Выражения для дифференциалов, соответствующих первому столб­
цу матрицы da(z) (10.57), см. в (10.38), (10.39). Вычислим диф—
^
ференциалы, соответствующие второму столбцу матрицы da(z)
, sinro
d ^
I
dsinro7— sinrodA/
1 t .
,
_
.
= ----- ^ r — i — = ^r- (sin cp cos ф duH— cos2 cp dvH—
1£
н
— sin ф cos ф duK4 - cos2ф dvK--f- sin ф cos ф duH+ sin2 ф dvH—
— sin ф cos ф duK— sin2 ф dvK) = J - (sin 2ф duH— cos 2ф daH—
/
— sin 2ф duK+ cos 2ф duK). (10.58)
Аналогично,
d
COS ф
1
j = ^г- (cos 2ф duH-f sin 2ф d^H—cos 2ф duK—sin 2ф d^K). (10.59)
»
1
409
Подставляя выражения (10.38), (10.39), (10.58), (10.59) в (10.57),
получим выражение для касательной матрицы
(10.60)
* , = M t f ) + M Q ).
где
A t(^) = f x
x
sin ф cos ф 0 0
— cos2 ф
sin 2 Ф
— ЭШфСОЭ ф
— sin ф cos ф
СОЭ2ф
0
— sin 2 Ф
втф соэ ф
0
0
0
0
0
0
0
— sin ф cos ф
0
0
sin 2 ф
—этф соэ ф
0
0
0
0
— sin 2 ф
sin ф cos ф
sin ф cos ф — cos 2 ф
0
К (Q) = j
0
cos 2ф
~—sin 2ф
cos 2ф
sin 2ф
0
0
sin 2ф — cos 2ф
—соэ2ф — sin 2ф
0
0
0
0
0
0
0
0
COS2 Ф
0
0_
(10.61)
sin 2ф — cos 2ф 0~
—соз2ф — sin 2ф 0
0
0
0
—sin 2ф
соз2ф 0
соэ2ф
sin 2ф 0
0
0
0_
(10.62)
П о лагаяф = 0 , получим матрицу к 2(ь) для осей, связанных со стерж­
нем в деформированном состоянии. Доля касательной матрицы,
порожденная наличием поперечной силы при переходе от итерации
к итерации, не оказывает существенного влияния на процесс сходи­
мости и ею можно пренебречь, тогда
ОП
Г0
0
N_ 0
0
1
0
0
0
0
0
0
0
0
— 1
0
0
0
0
0
0
0
— 1
0
0
0
0
0
0
0
0
1
0
0
0
0
J
(10.63)
Касательные матрицы имеют наиболее простой вид в системе коор­
динат, связанной со стержнем в деформированном состоянии. Эти
матрицы и используются в программных комплексах. Для перехода
в глобальную систему координат применяются матрицы направ­
ляющих косинусов углов p между глобальной системой координат
и системой координат, связанной со стержнем в деформированном
состоянии (рис. 10.7, р = а+ ф ).
Приведём примеры расчета стержневых систем, работающих на
изгиб.
Пример 3. На рис. 10.8 изображен консольный стержень, загруженный мо­
ментом; показана его разбивка на элементы £ = 1 0 б‘МПа, ^=0,346*10-4 м2, J=
410
X
Рис. 10.8
Рис. 10.7
= 10“ 10 м4. На этомже рисунке показан процесс последовательных приближений
(рисунок снят с экрана графического дисплея).
Пример 4. На рис. 10.9, а изображено кольцо, присоединенное к земле с по­
мощью четырех стержней и загруженное силами Р. Модуль упругости £ —
=2*105 МПа, ^ = 1 ,£ = 3 ,1 4 - 1 0 " 4м2, /=0,7854«10~8м4, кольцо заменено правиль­
Рис. 10.9
ным вписанным двадцатиугольником. На рис. 10.9, б, в показаны равновесные по­
ложения, соответствующие значениям сил P = 1 0 000 H (рис. 10.9, б) и P = 20 000 H
(рис. 10.9, в) (оба рисунка сняты с экрана графического дисплея).
§ 10.3. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
В предыдущем параграфе при расчете стержневых систем ис­
пользовался метод Ньютона — Рафсона. Этот метод позволяет найти
равновесное положение системы. Но при этом неясно, является ли
найденное положение устойчивым или неустойчивым. Для того
чтобы ответить на этот вопрос, необходимо проанализировать каса­
тельную матрицу жесткости. Если эта матрица для равновесного
положения является положительно определенной, то найденное
положение равновесия является устойчивым. Для исследования
положительной определенности используется критерий Сильвестра
4 ii
(если все главные миноры положительны, то матрица является
положительно определенной). В программных комплексах для ре­
шения системы линеаризованных уравнений используется метод
Гаусса. При этом касательная матрица раскладывается в произве­
дение трех матриц (см. § 13.4):
Ki = LW L.
(10.64)
Как известно из линейной алгебры, главные миноры равны про­
изведению элементов матрицы D. Поэтому признаком положитель­
ной определенности является то, что все элементы диагональной
матрицы D являются положительными. Если у матрицы D какойнибудь из элементов равен нулю, то это является признаком крити­
ческого состояния и может служить определением критических
сил. Таким образом, меняя внешнюю нагрузку, можно определить
ее критический параметр для заданной системы. Отметим, что по­
ложение равновесия кольца, изображенное на рис. 10.9, б, является
устойчивым — все эле­
менты диагональной мат­
рицы D положительны,
а на фис. 10.9,e — не­
устойчивым (последний
элемент
диагональной
матрицы D отрицате­
лен).
Рассмотренный выше
подход позволяет судить
об устойчивости всего
ансамбля конечных элементов, которым моделируется стержне­
вая система. Это так называемая общая потеря устойчивости.
Наряду с общей потерей устойчивости может произойти потеря
устойчивости в пределах одного конечного элемента — местная
потеря устойчивости. Для ее исследования необходимо рассмотреть
продольно-поперечный изгиб стержня. Закон Гука для стержня
с учетом продольно-поперечного изгиба имеет вид
A = ft(tf)s.
(10.65)
Особенностью является зависимость матрицы b от продольной
силы N. На рис. ЮЛОизображенстержень, находящийся вусловиях продольно-поперечного изгиба. Дифференциальное уравнение
изгиба стержня имеет вид
d^ —
М
/1 П Ш
dx2
EJ'
(10.66)
где
M = Ny + M a + ¥ ± =^ " - x.
(10.67)
Подставляя (10.67) в (10.66) и дважды дифференцируя, получим
0
412
+ " 2ё = о -
w n = Y w '
^10-68)
в
соответствии с ( 1 0 .6 6 ) уравнение ( 1 0 .6 8 ) представим в виде
d2M
+ ri*M = 0.
(10.69)
dx*
Решение дифференциального уравнения (10.69) имеет вид
(10.70)
M = A cos nx + В sin я*.
Определим произвольные постоянные А и В:
при я = 0 УИ= М Н, при x = l M = a)
x
= М к; тогда
JT ^ .
yWH= А,
М к = Л cos nl + В sin nl,
N
откуда
^
^^^
Л = МН, В = г - К~SlH
^ t%
уb- — . (10.71)
Для построения м атрицы £(#)вы числим углы поворота Дфн и Дфк от
М н и УИК с учетом продольной си­
лы N.
В соответствии с методом Мора
(рис. 1 0 . 1 1 , а —e)
г
^
'
x
Iш
^
l- x
/ i
_
^щ рш ш гп в^
Рис. 10.11
i
__
Дф„ = ~ ^ М М г Ах,
Дф K = ~ j § M M 2 dx.
0
0
Подставляя (10.70) в (10.72), получим
t
1
Г
x
Дфк = Y J \ (A cos nx + В sin nx) у dx.
(10.72)
(10.73)
Используя процесс интегрирования по частям, можно записать
i
Г
j
/s in n / , costil—11 .
/iA 7 п
\ x c o s n x dx = — n------ 1------^n 2— »
(lU.74)
J л: sin пл: d* =
о
l cosnl , sin nl
n
(10:75)
Подставляя (10.74) и (10.75) в (10.73) и используя (10.71), по­
лучим
АФк = ^ [ М н 4 ( ^ - 7 ) + М к ! ( ^ - ^ ) ] .
где v - n L
4.13
Аналогично можно получить выражение для Дфн. Используя вы­
ражение для Дфн и Дфк, получим
[Л
фн1=
U < p J _
1
_6 E J
'M,
М.
6E J
3EJ
1
P(0)
3EJ
a(v)
ГМ н,
• Wk
(10.76)
где
< *w = l(i-^
Р(у) = т ( ^ г Ч
Здесь
v= n l = Y ^ L
(10.77)
Обращая матрицу выражения (10.76), получим
-4E J
. ч
2EJ
— Ф2 (У)
b-*(N) =
2EJ
—
. .
_-------— Фз (У)
. ,
Фз (»)
4E J
—
. .
(10.78)
Ф3 («)_
ГД0
V ( f g V — v)
4>*(o)
8 tg и (tg v j 2 - v / 2 ) 9
, ч_
v (v — sin v)
Фз(у)
4 sin v ^tg vj2 —Vj2)
*
(10.79)
(10.80)
Запишем полную систему уравнений строительной механики для
стержня с учетом геометрической нелинейности и продольно-по­
перечного изгиба
а (г) s==r, ^ <|
a T(z)dz = dA, f
(10.81)
dA = ft(W )d s.J
Выражение для касательной матрицы k r будет аналогичным вы­
ражению (10.18), отличие состоитв том, что матрицазаконаГука
b (N) зависит от N:
к т= кг (z) + k,(N ),
(10.82)
k t (z) = a (z) Ь~г (N) а т(z);
(10.83)
где
d a(z)s = k z ( N ) d z .
В соответствии с (10.68)
N = n*EJ, ~ = Ц пЧг = Ц v \
414
(10.84)
(10.85)
Подставляя a(z) (10.54), k 2(N) (10.63) со знаком минус (в даль­
нейшем сила N считается сжимающей) при / = / в (10.82), по­
лучим
EF
t
0
12EJ
0
6EJ
/з
0
0
Лг
/г
6EJ
4EJ
—
0
0
12EJ
6E J
P
6EJ
—
0
— Ф*
2EJ
— Фз
0
0
12EJ
6EJ
—
%
6EJ
0
Фз
6EJ
^2
— ^гФ *
1
— w ^
2EJ
^ * «
12EJ
—
0
[3 ^2
6EJ
0
?«
о
0
0
Ф<
~ Ф *
_EF
t
__EF
1
0
—
------w ч>*
4EJ
— %
г г ф*
( 10 .86 )
где
<P2 = 4>2 (*O* Фз = Ф з(^ ).
_ 8 ф 2 (u) + 4ya ( v ) - v 2 .
42“
i2
»
_ 4ф2 (о) + 2 у 3 (и)
6
Выражение (10.86) может быть использовано для расчета сжа­
тых стержней с переменным сечением и расчета рам со сжатыми
стойками. При ин = и к— 0 из матрицы (10.82) необходимо выбро­
сить первую и четвертую строки и соответствующие им столб­
цы.
Построим матрицу k T для случая, когда в точке «н» стер­
жень имеет шарнир. Для получения этой матрицы используем
исключение по Гауссу—Жордану (см. § 13.4). Все необходимые
выкладки приведены в табл. 10.2. В соответствии с табл. 10.2
Т а б л и ц а 10.2
12ЯУ
9 E / ^4
/*
42
/3
Ф2
6EJ
—
— /з
—
9 £ /ф |
^ 2+
6EJ
3EJ
ф4
4EJ
—
ф4
12£/
JL 5Ei
2/ ф 2
ч>2
/з ф2
_A $*
2/ ф2
ф 4фз
.L i?
j2 - - ^ -
2
ф2
12£7
/»
9 H /< P 4
*1^
P
6EJ
---- Р “
—
?E J
/2
Ф 4"
ф2
2EJ
1
ф4
12£У
/» Л2
9EJ q>l
/3 ф*
6EJ
3EJ ф 3ф 4
— —
/2 “ ф 4 +
6EJ
6EJ
ф 4ф 3
ф2
фз
3 £ У ф 4ф 3
----- p-4>*+~
ф2
EJ ф1
4EJ
— Ф2- 1 ф2
415
T а б л и ц а 10.3
3EJ
Л
J
ф т
- с— 4
N'
\
j
^ 4 t J
— ^
1
j
W
< P ^ )= 4 < M < o -js g l
ф2 (t')
V (t g V — V)
8tgr(tgu/2- y/2)
’
v (v — sin v )
^
г
^3 ^ — 4 sin v (tg и / 2 ~ и Щ
? 4 (y)= i< M ± + 2 $iM
‘
9
^L3<Ps(u)
/ \
4
/ ч
1 фз fa)
Ф1 М = З Ф .М - Т ^
Tji (v) = 4 % И - 3
.
ф* (t')
ф2 (v)
% (у )= м + ^ ь ± ^
NA * F v , M
,.Л
4ф2 (i<) + 2фз (г1)
ф4 { Ч “ ------ 12
л/
N
n- V ш
N
вид
3EJ
. .
— % (»)
лт
^7
^ГЛ хИ
3EJ
. .
-4 > iW
416
3£У
. .
3£У
3EJ
', v
3£/
3EJ
. ,
— % (У)
— % (У)
- - < P i (»)
П Ф1 (w)
. .
— Фх (U)
3 £J
. .
— Фх (У)
(10.87)
4
ф2
3 '*
? Ф2
Функции фх(у), ф2(^), фз(^), фД^), *\i(v), ^ 2(u) являются поправочными множителями к реакциям от единичных смещений, учитывающих
влияние продольной силы.
Используя выражения (10.86), (10.87), составим таблицу реак­
ций от единичных смещений концов стержня (табл. 10.3), В табл. 10.4
приведены значения поправочных множителей в зависимости от
параметра v. Приведем примеры расчета рам на устойчивость.
T а б л и ц а 10.4
ь
q>i (в)
Фз (t')
<Pa(w)
ф4 (»)
T)s (V)
TU(0)
I
0,00
1,0000
0,25
0,50
0,75
0,9958
0,9832
0,9619
0,9313
0,8908
0,8393
0,7751
0,6961
0,5991
0,4793
0,3291
0,1361
—0 , 1 2 2 0
—0 , 4894
—1,0693
—2,1726
—5,3838
+227,80
_
_
-_
_
__
*__.
1,00
1,25
1,50
1,75
2,00
2,25
2,50
2,75
3,00
3,25
3,50
3,75
4,00
4,25
4,50
4,75
5,00
5,25
5,50
5,75
6,00
6,25
1,0000
0,9979
0,9916
0,9811
0,9662
0,9469
0,9226
0,8936
0,8590
0,8187
0,7720
0,7181
0,6560
0,5846
0,5021
0,4061
0,2933
0,1587
—0,0048
—0 , 2097
—0,4772
—0,8488
—1,4181
—2,4526
—5 , 1594
—47,067
1,0000
1,0010
1,0042
1,0095
1,0172
1,0274
1,0403
1,0563
1,0760
1,0998
1,1286
1,1634
1,2058
1,2574
1,3212
1,4008
1,5018
1,6327
1,8070
2,0468
2,3924
2,9232
3,8234
5,6223
10,727
94,186
1,0000
1,0000
1,0000
0,9990
0,9958
0,9905
0,9832
0,9737
0,9619
0,9478
0,9313
0,9194
0,8908
0,8665
0,8393
0,8089
0,7751
0,7377
0,6961
0,6501
0,5991
0,5425
0,4793
0,4086
0.3291
0,2390
0,1361
0,0172
0,9750
0,8999
0,7743
0,5980
0,3700
0,0893
—0,2457
—0,6372
—1,0884
—1,6040
—2,1917
—2,8639
—3,6428
—4,5727
—5,7568
—7,5060
—11,4050
+221,05
—
—
—
—
—
—
0,9937
0,9750
0,9437
0,8999
0,8435
0,7743
0,6926
0,5980
0,4906
0,3700
0,2364
0,0893
—0,0713
—0,2457
—0,4341
—0,6372
—0,8550
—1,0884
—1,3377
—1,6040
—1,8882
—2,1917
—2,5162
—2,8639
—3,2380
"
Пример 11. На рис. 10.12, а показана рама со стойкой, сжатой силой Р. Ос­
новная система метода перемещений для этой рамы показана на рис. 10.12, б.
На рис. 10.12, в показана единичная эпюра. Вырезая узел (рис. 10.12, г), получим
.3E J.3E J
/ч 3EJ го
...
T i i = 2 —— j— J - ф1 (v) = ^ - [2 + ф1 (у)].
1 Пример взят из ки.: СмирновВ,А., ИвановС.А.} ТихоновМ.А. Строительная механика. М., 1984.
Каноническое уравнение будет иметь вид
ГцZi = 0, Zi Ф 0 , Ai = 0 ,
qF 7
отсюда
^ ( 2 + <Pi(<0) = O, V iM = ^ 2 .
По табл. 10.3 t>= 3,96
По формуле (10.84)
Пример
2\
N = v*EJ/l* = (l5.68EJ)/t*.
На рис. 10.13,a изображена рама с двумя сжатыми стойками.
Г Ф
2 EJ
r-9j(<*v)
7тг ъ М
Рис. 10.13
1
Пример взят из кн.: Прокофьев И . # ., Смирнов Л. Ф. Теория сооруже­
ний. Ч.З.М., Трансжелдориздат, 1947.
418
Основная система и единичные эпюры изображены соответственно на
рис. 10.13,б ,е ,г . Вычислим аргументы поправочных множителей:
п - Y b ^2
- /S -
Вырезая узлы, получим:
8EJ , 3EJ
Гп
Г22'-
Y jr - V W - w
1
1
8EJ
4EJ
1
/
Yw-'-
4EJ
/ ф2 ( а у ) = ^ [ П + 4фа (MlS
EJ
ф 2
( ^ )
=
—
[ 8
+
4 ф
2
(у )];
4EJ_
Т\ 2 ~ Т
21
—
1
Система канонических уравнений имеет вид
FI
4F I
^ [ 11 + 4ф2 (ок-)] ^ 1 + — Z2 = 0;
( 10.88)
AF J
EJ
_ _ £ 1 + _г [8 + 4ф2 („)] Z2 = 0.
Система уравнений (10.88) имеет отличные от нуля решения в случае, если
4EJ
, получим
определитель системы равен нулю. Сокращая оба уравнения на
2,75 + ф2 (av)
1
1
2+
ф2 (у)_
1
= 0.
Раскрывая определитель (10.89), получим
фз (at*) ф2 (и)+2ф 2 (av) +2,75ф2 (y)+ 4,5 = 0.
Решая уравнение (10.90) подбором, получим
EJ
v=5, S6 и P*p = 30,9*^p
(10.89)
(10.90)
§ 10.4. РАСЧЕТ СТЕРЖНЕВЫХ СИСТЕМ С УЧЕТОМ ФИЗИЧЕСКОЙ
НЕЛИНЕЙНОСТИ. ПРЕДЕЛЬНОЕ СОСТОЯНИЕ
До настоящего параграфа предполагалось, что материал рас­
считываемой стержневойсистемы подчинялся закону Гука. В дан­
ном параграфе считается, что материал системы подчиняется диаграммеПрандтля (рис. 10.14). При
этом разгрузка происходит по пря­
мой, параллельной начальному
участку, соответствующему закону
Гука. Пределы текучести на рас­
тяжение и сжатие будем прини­
мать одинаковыми.
Особенности ' работы стержне­
Рис. 10.14
вой системы в упругопластической
стадии поясним на примере прос­
тейшей системы, изображенной на рис. 10.l5,a. Будем считать,
что площади поперечных сечений всех стержней одинаковы и рав­
14*
419:
ны F, тогда предельное усилие
NT= oTF.
(10.91)
Первоначально произведем расчет в упругой стадии. Система
является дважды статически неопределимой и для ее расчета
а)
|Y
S)
д)
Рис. 10.15
используем метод сил. В результате расчета внутренние силы в
стержнях будут:
JV* = 0,134P, W2 = 0,261P, Ыя = 0,454P, W ,-0 ,3 1 9 P . (10.92)
Наибольшее усилие возникает в третьем стержне. Приравни­
вая его NT, получим
NT= 0,454P, откуда P^2,204A fT.
(10.93)
Подставляя (10.93) в (10.92), получим усилия в стержнях при
текучести третьего стержня. Эти усилия приведены в табл. 10.5.
Т а б л и ц а 10.5
Уснлия
Ni / NT
N t/ N T
N 3/ Nr
Ni l Nr
P/ NT
vEF/Nr
Первый
шаг
Приращенне
после первого
шага
Второй
шаг
Приращение
после второго
шага
Третий
шаг
Остаточные
значения
0,296
0,574
0,126
0,243
0,000
0,298
0,510
1,694
0,422
0,817
—0 , 129
0,183
0,000
0,000
0,067
0,248
0,293
—0,081
0,275
—0,262
0,114
0,000
0,895
1 ,0 0 0
0,702
2,204
4,000
1 ,0 0 0
1 ,0 0 0
2,714
5,694
1 ,0 0 0
1 ,0 0 0
1 ,0 0 0
2,781
5,942
Процесс получения этих усилий здесь и в дальнейшем будем назы­
вать п e p в ы м ш а г о м расчета. Очевидно, что вертикальное
перемещение точки приложения силы P будет равно удлинению
третьего стержня
(10.94)
Далее переходим ко в т о p о м у ш а г у и произведем расчет
системы, изображенной на рис. 10.15, б в упругой стадии. Система
420
является статически неопределимой, и для ее расчета снОва исполь­
зуем метод сил. В результате получим приращения усилил:
A ^ = 0 ,2 4 7 A Pu A N 2 =0,477А РЬ A ^ = 0 ,5 8 4 A P ,..
(10.95)
Складывая эти усилия с усилиями первого шага, получим
A^ + A N ±— 0,296iVT+ 0,247APj; \
N 2+ A N 2= 0,574NT+ 0,477A ^; \
iV + A N 4= 0,702NT+ 0,584APj. J
4
(10.96)
Такое сложение возможно, так как усилие в третьем стержне при
росте внешней силы будет оставаться постоянным и играть роль
нагрузки для системы, состоящей из трех стержней (рис. 10.15, б).
Приравнивая каждое из выражений (10.95) значению N T, решая
полученные уравнения относительно АР 1 и выбирая из них наимень­
шее, что соответствует текучести в четвертом стержне, получим
AP,=0,510A^.
(10.97)
Подставляя (10.97) в (10.96), получим усилия второго шага. Ана­
логично складывая перемещение v первого шага с перемещением
от APi, получим перемещение точ­
ки приложения силы P на втором Р/Мт
шаге (см. табл. 10.5).
2 J
2,7Sf
2,7/4 ____L^ ^ 1 r*
Далее рассмотрим систему, изо­
- 2, 2т
браженную на рис. 10.15,e, ко­
> ^ v p ' ^ ^4l
Jf< г^ §
^ §ъ
торая является статически опреде­
/
Q ^r
^rчг^
^ < __ I__
I__ ‘
лимой:
AN±= —1,932 АР 2,
’о Л 3 * * В 7 " - ^ " r
AJV2-2 ,7 3 2 A P 2. (10.98)
Рис. 10.16
Аналогично предыдущему опреде­
ляем усилия и перемещение v
для т р е т ь е г о ш а г а (см. табл. 10.5). График зависимости
силы P от прогиба v приведен на рис. 10.16. В соответствии с
табл. 1 0 . 5 наибольшая сила, которую может воспринять система,
равна P=2,781W T. Произведем разгрузку системы, которой отве­
чает пунктирная линия, изображенная на рис. 10.16. При разгрузке
система в силу диаграммы Праидтля (см. рис. 10.14) ведет себя как
упругая
0,296
2,781iVT= 0,374Л7Т;
Ni =
2,204
N — 0^574 2.781 Л/т = 0,725W/,
2 2,204
_
'>
1,000
2, 204
2,781iVT= 1,262Л/Т;
2.781 Л/Т=
N
= ^
IV* 2,204
V=
4 ,0 0 0
2,204
(10.99)
0 , 8 8 6 ЛГ
Т;
2 ,7 8 1 ^ = 5,047tf,.
421
Вычитая эти значения из соответствующих значений усилий и пе­
ремещения третьего шага, получим их остаточные значения (см.
табл. 10.5). Вновь нагрузим систему нагрузкой P = 2 ,7 8 lN r и вы­
числим усилия и перемещения с учетом их остаточных значений;
N t = 0 ,3 7 4 ^ — 0,081 NT= 0,293ЛГТ;
N 2= 0,725NT+ 0,275NT= l,000iVT;
N„ = 1,262NT— 0,262NT= 1,OOOA^;
N t = 0 ,8 8 6 N T+ 0 ,114NT= 1,000W,;
v = 5,047 ^ f + 0,895 ^
= 5,942 § .
Таким образом, система «приспособилась» к нагрузке, т. e. при
нагрузке, не большей 2,781 N r, она работает как упругая. Описан­
ный подход носит название прямого расчета, который позволяет
проследить все стадии работы системы: ее упругую работу, упруго­
пластическую работу, стадию разрушения и разгрузку.
Для определения предельной нагрузки можно использовать
другой более простой подход, основанный на статической теореме.
Согласно этой теореме, разрушающая нагрузка является наиболь­
шей из всех нагрузок, при которых могут быть удовлетворены усло­
вия равновесия системы, а каждое из усилий не превышает пре­
дельного.
Составим условия равновесия для системы, изображенной на
рис. 10.15, а:
2X = 0 , —0 ,7 0 7 ^ — 0 ,5 0 0 ^ + 0,707N , = 0;
(10.100)
2 Г « 0, 0,707Ni + 0,866N 2 + N s + 0,707W4 = P.
(10.101)
Усилие N 3 входит в выражение ( 1 0 . 1 0 1 ) со знаком плюс, в то же
время оно не входит в выражение ( 1 0 . 1 0 0 ), т. e. не накладывает ни­
каких условий на остальные усилия. Поэтому естестЕенно принять
для него наибольшее значение N 3= N r, так как необходимо найти
такое сочетание внутренних сил, при котором P было бы наиболь­
шим. Рассмотрим возможные комбинации:
1) N , = N , = N , = N , ;
2) N ,= N ,= N ^ N ^
3) N 3= N 2= N 4= N r.
Подставляя эти значения в (10.100), получим
1) —0,707iVT—0,5МТ+0,707М4= 0 , откуда iV4= l,7 0 7 N T;
2) —0,707iVT—0,5A^2+0,707iVT= 0 , откуда iV2= 0;
3) —0,707iVi—0,5iVx+0,707jV4= 0 , откуда A^=0,293A^.
В первом случае усилие в четвертом стержне превышает пре­
дельное и, следовательно, эта комбинация не является возможной.
Используя уравнение (10.101), получим значение сил P соответ­
ственно для второго и третьего вариантов:
2) P=0,707NT+ Q + N T+QJ07NT, откуда P=2,414JVT;
3) P = 0 ,7 0 7 •0,293NT+0,866N T+iVT+0,707iVT, откуда P=2,780iVT.
Наибольшее значение P=2,780N T является предельным и совпа­
дает со значением, полученным в прямом расчете.
422
При расчете ферм с большим количеством стержней.исподьзование статической теоремы затруднительно из-за большого количе­
ства вариантов усилий. Кроме того, в фермах, как правило, наряду
с растянутыми стержнями присутствуют сжатые, которыемогут по­
терять устойчивость. Поэтому для определения предельной нагруз­
ки для таких ферм более удобен прямой метод расчета. При этом
диаграмма cr(e) для каждого стержня имеет вид, показанный на
рис. 10.17. Если потеря устойчивости
происходит в упругой стадии, то
Pa
n 2E J
l2F
7
Далее остановимся на расчете в уп- ^ 'd
ругопластической стадии систем, рабо­
тающих на изгиб. Рассмотрим для прос­
Рис. 10.17
тоты консольную балку (рис. 10.18, а).
Ha рис. 10.18, б изображена основная
система. Предположим, что балка прямоугольного сечения имеет
размеры: # = 1 0 с м , L = 50 см, 6 = 5 с м ,£ = 2 ,Ы 0 МПа. Разделим
балку по длине на 200 равных частей (400 неизвестных метода пере­
мещений). После решения задачи на ЭВМ получаем значение про­
гиба, в точности совпадающее со
p
$
значением,
вычисленным по фор­
•УЛ
'f
А муле сопротивления материалов
I
1<
v = 3EJ в
( 10. 102)
Ic
- ^
^
«с- ----------------------- >~ b^4^
Этот пример показывает, что даже
при очень узких элементах с со­
отношением размеров L/tf=0,025
метод перемещений дает правиль­
ное значение прогиба. Это обстоя­
т »• * т
••*
тельство используем при расчете
Iщ
\щ
Wn
балок в упругопластической ста­
дии. Для расчета балки, материал
Рис. 10.18
которой подчиняется диаграмме
Прандтля, будем
использовать
многослойный элемент, при этом модули упругости слоев' прини­
маются различными, зависящими от его деформации. Жесткость
элемента на изгиб
p
rn
m
p
з
i
3
^
£У = £ £ , ( е ) / , = £ я , ( е ) ^ + В Д 1 = 1
1 = 1
L
(10.103)
J
Расчет балки проводимвтакой последовательности: первоначаль­
но модули упругости всех слоев принимаются одинаковы м и £*(£)—
=■Я, где E ^ i g a (рис. 10.19). Далее вычисляем-относительйые деформации для каждого слоя на уровне его центра тяжести и, ггёгль423
зуясь диаграммой Прандтля (см. рис. 10.19), определяем модуль
упругости каждого слоя £* = tg P, затем процесс повторяется.
На рис. 1 0 . 2 0 приведены результаты расчета и крестиками по­
казана зона пластической деформации. Сплошной линией изобра­
жена граница пластической зоны,
полученная аналитически х. На том
же рисунке показаны эпюры нор­
мальных напряжений в сечениях 1—
—У, 2—2, 3—3. В первом случае эпю­
ра соответствует упругому расчету.
Величина а называется упругим яд­
ром (очевидно, что при упругом рас­
чете a —hi2). Предельному моменту
соответствует эпюра, состоящая из
двух прямоугольников (a = 0). Получим формулу для предельного
момента
bH_n_
ьт
2 = ат
(10.104)
М т= а г
2 4
Описанная методика позволяет рассчитывать любые сечения
с вертикальной осью симметрии. Если сечение несимметрично отно­
сительно горизонтальной оси (например, тавр), то на каждом шаге
необходимо определять положение нейтральной оси по приведен­
ному статическому моменту.
Рис. 10.20
Прогиб в консольной балке прямоугольного поперечного сече­
ния, загруженной сосредоточенной силой на конце при учете упру­
гопластических деформаций, выражается формулой
икр= 1 , 4 8 1 ^ .
(10.105)
Определим силу, соответствующую предельному моменту М т
(10.104):
M = P l = e.'1^ ,
(10.106)
1 См.: РжаницынА. P, Расчет сооружений с учетом пластических свойств
материалов, М., 1954.
424
откуда
n
ЬН*
р = aT ^ f •
(10.107)
Прогиб в той же точке упругой балки определяется по формуле
bh^
(10.102). Подставляя J = j 2 и Рповы раж ению (10.107), получим
У~
отЬН2 /3«12
4/ 3£Л>#а
ах/2
EH ’
, , Л «ЛЛ
(10.108)
Таким образом, прогиб при учете пластических деформаций от­
личается от упругого приблизительно на 32%. Если поперечное
сечение будет иметь форму двутавра, то зона распространения плас­
тических деформаций будет значительно меньше и соответственно
меньше будет различие в прогибах.
Рассмотрим сечение в виде идеализированного двутавра (двуF ( h \2
Fh2 \
тавра, состоящего только из тонких полок ^ = ~2~ ( ^ ) ' 2 ^ ^ p ) •
Очевидно, что при силе, соответствующей пластическому моменту,
зона пластических деформаций воз­
никнет только в сечении, совпа- p
дающем с заделкой (рис. 1 0 .2 1 ). ^
При дальнейшем росте нагрузки ^
i
в силу диаграммы Прандтля (см. |
рис. 10.14) момент в заделкеостанется постоянным. При действии
Рис. J0.2l
нагрузки противоположного знака
произойдет разгрузка (рис. 10.14) и сечение будет работать упруго.
Шарнир, работающий по такому принципу, называется пластиче­
ским:. В дальнейшем будем рассматривать именно такие идеализи­
рованные пластические шарниры, т. e. считать, что пластическая
зона возникает только в одном сечении, совпадающем с сечением,
где момент равен предельному. Очевидно это решение тем точнее,
чем ближе поперечное сечение стержня к идеальному двутавру.
Далее остановимся на определении предельных нагрузок для
рам. В качестве примера рассмотрим раму, схема которой изобра­
жена на рис. 10.22, а. Изгибная жесткость и предельные моменты
для всех стержней приняты одинаковыми ( E J , M r). Для вычисления
предельной нагрузки воспользуемся прямым методом расчета. Рама
является однажды статически неопределимой. Раскрывая статиче­
скую неопределимость по методу сил, получим эпюру изгибающих
моментов, изображенную на рис. 10.22, а. Приравнивая наиболь­
ший момент предельному моменту М Т, получим
у Р / = Мт, откуда p = j g ^ j E-
(10.109)
Умножая все ординаты эпюры, изображенной на рис. 10.22, а, на
P (10.109), получим эпюру, изображенную на рис. 10.22, б. Пере­
ходим ко второму этапу и строим эпюру моментов для статически
определимой системы, показанной на рис. 10.22, в. Складывая
42S
ординаты эпюр, показанных на рис.
2 (рис. 1 0 . 2 2 , а), получим
1 0 .2 2 , 6 ,
в в сечениях 1 и
А^ = ^ М Т+ 4ЛР/, М 2= ^ - М т+ 3№1.
Приравнивая М г = М т и М 2= М Т9 находим два значения А Р и
выбираем из них наименьшее
АР=т^г-
( 10Л 1°)
Умножая ординаты эпюры, изображенной на рис. 10.22, e, на AP
(10-110), получим эпюру, приведенную на рис. 10.22, г.Предель-
ная нагрузка будет
D __ ^ ^ T
~~ Ю~7
| 5 М т_ М т
^ 38 ~1---- Ж -
/1 л t j
^^
(™ .H 1 )
Складывая эпюры, показанные на рис. 1 0 .2 2 , 6 ,a , получим окончательнуюэпюру, изображенную на рис. 10.22,5. Вычитая из
эпюры эпюру, соответствующую упругомурасчету (рис. 1 0 . 2 2 ,a ),
умноженную на P (10.111), получим остаточную эпюру изгибаю­
щих моментов (рис. 1 0 . 2 2 ,e).
Для определения предельной нагрузки можно использовать
статическую теорему, приведенную выше. На рис. 10.23 изобра­
жена эпюра моментов, удовлетворяющая условиям равновесия.
Моменты в характерных сечениях 1, 2 и 3 не должны превы­
шать М х;
Mi = /* < A ^ ;
(1 0 .1 1 2 )
М 2 = /х— Р / < М т; :
(10.113)
Af, = - f r + 4 P /< M * . ;
(10.114)
426
Нагрузка P и реакция х 9 показанные на рис. 10.23,положительны, поэтому
P > 0;
(10.115)
x^z0.
(10.116)
Для решения задачи изобразим область, ограниченную нера­
венствами ( 1 0 . 1 1 2 ) — (10.116), в декартовой системе координат
х 9 Р.
i 1
P
и
Рис. 10.23
P
- 1х+т*Мт (to.toti
Рис. 10.24
Как видно из рис. 10.24, неравенство (10.113) является несуще­
ственным для определения этой области. Наибольшему значению
силы P отвечает точка «к», при этом Рп^ А~ - ^ - . Таким образом,
значение предельной нагрузки совпадает со значением, полученным
выше методом прямого расчета. Обратим внимание на то, что при­
веденный выше геометрический подход возможен только в том
случае, когда система является однажды статически неопределимой.
Рис. 10.25
Если система имеет большую степень статической неопределимости,
то используется математический аппарат линейного программиро­
вания, основной задачей которого является нахождение экстрему­
ма линейной функции, если ее аргументы удовлетворяют системе
линейных неравенств.
427
Для определения предельной нагрузки можно использовать еще
один метод, основанный на применении кинематической теоремы.
В соответствии с кинематической теоремой из всех возможных
механизмов разрушения действительным будет тот, который соот­
ветствует минимальной нагрузке, которая и является предельной.
На рис. 10.25, а — в изображены три возможных механизма
разрушения и действующие на него силы и моменты для системы,
изображенной на рис. 10.22, а. Используя принцип возможных пере­
мещений, составим для каждого из этих механизмов уравнение
работ:
P = 2 Мт.
P A - M + - M , j - = 0 (рис. 10.25, а)
1 ’
PA + 2 PA — AfT4 ~ A f T^ =
0
(рис. 1 0 .2 5 ,6 ) ^ P = y ^ ;
Р Л + 2 Р А _ М ТА _ М ТА = 0(РИС. 10.25, e)
М.
Наименьшему значению соответствует P=^^T> которое совпадает
с предельными значениями, полученными выше другими методами.
Рассмотрим далее расчет балки постоянного сечения при дей­
ствии на нее подвижной единичной силы с учетом упругопластиче­
ской стадии (рис. 10.26. а).
Для решения задачи ис­
пользуем метод прямого
расчета.
Первоначально
произведем упругий рас­
чет. При каждом положе­
нии силы P в качестве ос­
новной системы используем
систему с шарниром, вре­
занным под силой. На
рис. 10.26, б показаны еди­
ничная и грузовая эпюры;
шарнир в точке 10 не врез­
ной, см. рис. 10.30.
1
2000
1
10 —/
fiu = E J 3t2
А* =
EJ
6i [( 1 0 — /) (i + 2 0 ) + 2 0 0 J,
откуда
ki
6ц
(10.117)
10
M 10= k ---- r M i'
где k = 1 0 — i.
В табл. 10.6 приведены значения М { и Af10, подсчитанные по
формулам (10.117). Предположим, что М т= 1,800. Тогда при поло­
жении сил в точках 1 и 2 действующие моменты не превышают М т
и, следовательно, справедлив упругий расчет. При положении
силы в точке 3 M = 1,895 (моментпревышает 1,800), следовательно,
428
необходимо учитывать пластические деформации. Очевидно, что
Мп
л= М уп9+ М о
с
г
,
(10.118)
откуда
Mocr = Мпд— М упр.
(10.119)
T а б л и ц а 10.6
i
1
2
3
4
5
6
7
8
9
10
k
9
8
7
6
5
4
3
2
1
0
Моменты, соответству­
ющие упругому
расчету
Момеиты, соответству­
ющие упругопластиче­
скому расчету
Mi
Afio
____^i____
0,875
1,504
1,895
2,064
2,031
1,824
1,475
1,024
0,515
0
—0 ,250
—0 ,480
—0 , 683
—0,840
—0 ,938
—0 , 960
—0 , 893
—0,720
—0 , 428
0
0,875
1,504
1,800
1,800
1,701
1,428
1,013
0,496
—0,079
—0,660
Мio
Остаточные момеиты
Mi
0
—0,250
0
—0,480
—0,095
—1,000
—0 , 264
—1,500
— 1,598
—0 , 330
— 1,620
—0,396
—0,462
—1,553
—1, 380 ■ —0,528
—0,594
—1,088
—0,660
—0,660
М„
0
0
—0,317
—0,660
—0 , 660
—0,660
—0,660
—0,660
—0,660
—0,660
Используя формулу (10.119) для положениясилывточкеЗ, полу­
чим значение эпюры остаточных напряжений
M ocr ^ 1,800 — 1,895 = — 0,095.
Очевидно, что эпюра остаточных моментов имеет вид треугольника
с наибольшей ординатой в точке 10 , но известна ее ордината
в точке 3. Тогда в силу вышесказанного будем иметь
м
10
= — ^22^. j о _ — o,3i7.
Значения ординат эпюры остаточных моментов приведены
в табл. 10.6. Далее ставим силу в точку 4. Складывая ординату
эпюры моментов, соответствующую упругому расчету, и ординату
остаточной эпюры в точке 4 , получим
2,064— ^ 2 5 - 4 = 1,9373.
Момент под силой с учетом пластической деформации превышает
Мт, следовательно, при положении силы в точке 4 возникает пла­
стический шарнир. В соответствии с формулой (10.119) имеем
Мост= 1,800— 2,064 = — 0,264.
Аналогично предыдущему вычисляем ординату остаточной эпюры
в точке 10
М 10 = — ^ p • 10 = — 0,660.
429
Далее ставим силу в точку 5, с учетом остаточной эпюры ордината
эпюры моментов при положении силы в этой точке будет
М ь = 1,8 2 4 — ^ p ^ • 5 = 1,494.
Таким образом, при М < М Тпластического шарнира не возни­
кает, аналогичная картина будет и при остальных положениях силы
(точки 6 — 10), следовательно, эпюра остаточных моментов останется
неизменной. Складывая ординаты упругого расчета с ординатами
остаточной эпюры моментов, получим окончательную эпюру мо­
ментов (см. табл. 1 0 .6 ).
Далее остановимся на расчете стержневых систем в упруго­
пластической стадии с использованием ЭВМ. Рассмотрим следую­
щие задачи.
1. Расчет на заданную нагрузку и определение предельной
нагрузки при простом загружении.
2. Расчет на заданную нагрузку при заданном сложном процессе
загружения.
3. Расчет на подвижную нагрузку.
Задачи поставлены таким образом, чтобы при решении последу­
ющей задачи использовался алгоритм решения предыдущей. При
этом для решения последующей задачи необходимо добавить неко­
торые дополнительные блоки к блокам предыдущей задачи. При
использовании этих дополнительных блоков последующая задача
сводится к предыдущей.
Остановимся на п e p в о й задаче, в которой точки приложе­
ния нагрузки заданы, а ее значение растет пропорционально одному
параметру (простое загружение). Для решения задачи первоначаль­
но проводится упругий расчет. Затем значения моментов в харак­
терных сечениях выражаются через параметр нагрузки и прирав­
ниваются предельному моменту М т. Из полученных соотношений
определяются значения предельных параметров для каждого из
сечений. Наименьшее из этих значений определяет нагрузку, при
которой в одном из стержней возникает пластический шарнир.
Умножая на этот параметр эпюру упругого расчета, получаем эпю­
ру, соответствующую возникновению первого пластического шар­
нира. Если в узле сходятся два стержня с одинаковыми предель­
ными моментами, то пластический шарнир относится к одному из
них. В месте возникновения пластического шарнира врезаем шар­
нир и производим расчет системы с шарниром на нагрузку АР1л
Так как в пределах узла шарнир всегда врезается только в один
стержень (меняется тип стержня), количество неизвестных метода
перемещений остается прежним.
Далее определяется параметр первого приращения нагрузки
АР1ш При определении параметра нагрузки значению М тприрав­
ниваются моменты, соответствующие АРи сложенные с моментами
первого шага. Затем определяется параметр нагрузки второго шага
АР2, аналогично определяется параметр нагрузки АР3 и т. д. При
расчете нд заданную нагрузку процесс прекращается, как только
430
выполняется условие P + 2 + Л ^ ^ за д - Если условие выполняег" i
П
ся строго, то вычисляется разность A P = P + 2 P i ~ P 3ад . которая
i~ 1
принимается в качестве последнего приращения нагрузки. Если
определяется предельная нагрузка, то процесс прекращается, как
только система или ее часть
превращается в механизм.
Рассмотрим в т о р у ю за­
дачу. Представим сложное загружение в виде последова­
тельности простых. Исполь­
зуя предыдущий алгоритм,
произведем расчет на первое
простое загружение. Затем
рассчитаем систему с шарни­
рами, полученную на послед­
нем шаге предыдущего загру­
жения на второе простое за­
гружение и т. д. В связи с из­
менением характера загруже­
ния некоторые из шарниров,
полученные на первом загружении, могут закрыться. Поэ­
тому необходимо произвести проверку характера работ пластических
шарниров. Если работа предельного момента на приращениях угла
поворота первого шага второго загружения отрицательна, то соот­
ветствующий шарнир сохраняется (фактически для установления
этого факта необходим только знак выражения для работы). В про­
тивном случае он закрывается, т. e. в этом сечении восстанавлива­
ется неразрывность деформаций по углу поворота. Поскольку ве­
личина и направление предельных моментов известны, для подсчета
работы необходимо найти приращения углов поворота Дф. На
рис. 10.27 показан стержень с примыкающими к нему узлами до
первого шага второго загружения и после него. Углы ф* и фj на­
ходятся из решения системы канонических уравнений метода пере­
мещений. В соответствии с рис. 10.27
Ф= ''K7 '" ' фк = ф— ^ у ^ = 3ф7 ф/’ д Ф= Фу— Фк- (10.120)
В соответствии со сказанным выше
МтДф< 0 — шарнир сохраняется,
МтДф> 0 — шарнир уничтожается.
Аналогично производится расчет и на последующие простые загру­
жения.
Наконец, остановимся на т p e т ь e й задаче. Подвижная на­
грузка представляет собой последовательность сил с иавестными
расстояниями между нйми, причем эти расстояния могут быть раз­
ными (рис. 10.28, я). Для того чтобы подвижная нагрузка при любом
431
ее положений попадала в узлы расчетной схемы, поделим ездовой
пояс на n равных частей длиной d, соизмеримой с расстояниями меж­
ду силами (рис. 10.28, в). Используя правило рычага, приведем
нагрузку к системе сосредоточенных сил с одинаковыми расстоя­
ниями, равными d (рис.
) 6 8 10 4 4
10.28,6). На рис. 10.28,г — з
>\Г 1_ t j r
показано несколько пос­
ъ 맻 ^2^IW
—1
ледовательных положений
f^ 9 7' 7 6
1f ' г
подвижной нагрузки. Про­
изводим надвижку так, что­
бы первый груз встал в 1
V
узле (рис. 10.28, г), далее
5,5
4J
произведемрасчет наэту си­
лу (загрузка) и силу, нап­
*)
равленную в противопо­
3)
ложную сторону (разгруз­
£ A
ка), используя алгоритмы
?)■
предыдущей задачи. Далее
x)
производим следующую на­
\ 9 i 7 i 7 16
движку (рис. 10.28, d) и рас­
У
i3 f i7 i i6
чет на нагрузку и разгруз­
Рис. 10.28
ку. Результаты расчета при
второй надвижке складыва­
ются с предыдущими результатами и т. д. При этом, если при за­
грузке возникает пластический шарнир, то после разгрузки появ­
ляется эпюра остаточных моментов, которая складывается с ре­
зультатами расчета при последующей надвижке. Описанный алго­
ритм является универсальным, так как он пригоден и при упру­
гом и при упругопластическом расчете. Если система является
геометрически нелинейной, то можно использовать подход, описан­
ный в § 1 0 .2 .
Приведем для иллюстрации ряд примеров, решенных с исполь­
зованием ЭВМ.
i!
iLiLi!
Пример 1 . Определить предельную иагрузку и построить промежуточные
эпюры для рамы, изображенной на рис. 10.29, а. Модуль упругости материала
£=2*10 5 МПа. Рама имеет три типа поперечных сеченик
1. ^ - 3 ,4 * 1 0 - 4 м2; Jt= 85-10“ ®м4; М т= 4,25 кН*м.
2. ^ 2= 6 ,8 • 10- 4 м2; У2= 1 7 0 '1 0 - 8 м4; М т= 9,5 кН-м.
3. F3= 10,2*10~ 4 м2; У3—255*10-5 м4; М г~ 12,75 кН-м.
Сечения в данном случае заданы так, что номер типа является соответствующим
коэффициентом пропорциональности между характеристиками поперечного сече­
ния. Числа, стоящие около стержней (рис. 10.29, а), указывают номер типа попе­
речного сечения.
Последовательность расчета аналогична последовательности, использованной
при решении предыдущих примеров методом прямого расчета. Расчет произво­
дится по методу перемещений. Количество неизвестных на каждом шаге остается
таким же, как и на предыдущем. Последовательность эпюр, показанных на
рис. 10.29, б— ж, соответствует последовательности образования пластических
шарниров. Ординаты эпюр приведены в кН-м. На рис. 10.29, а сечения пронуме­
рованы в очередности образования пластических шарниров. На рис. 10.29, ж
показана окончательная эпюра моментов и приведена предельная нагрузка P =
= 1 кН, а на рис. 10.29, a — эпюра остаточных моментов.
432
Ф
P=0,7S04xH
t>)
Р=0,8453кН
г)
Р=0,9025кН , ■
Л И 5
fZjS
0,25
Рис. 10.29
8,25
Пример2. Построить эпюры моментов в балке, изображенной на рис. 10.30, а,
при действии подвижной нагрузки. Этот пример использовался в качестве тесто­
вого для проверки правильности работы программы. Исходные данные: P= 1 кН;
£=2*105 МПа; F = l,4 * 1 0 -4 м2; /= 35*10- 8 м4. Результаты расчета балки приве­
дены на рис. 10.30, б. На этом же рисунке показаны шарниры, которые раскрыва-
433
лись при положении нагрузки в местах шарниров и соответственно закрывались
при разгрузке. На рис. 10,30, в приведена остаточная эпюра моментов после при­
ложения нагрузки в точке JJ. Все эпюры построены с использованием графопо­
строителя и их ординаты совпадают с приведенными в табл. 10.6,
Пример 3. На рис. 10.31, а изображена рама, по которой перемещается на­
грузка в виде двух сил. Модуль упругости материала рамы £ = 2 -1 0 5 МПа, харак­
теристики поперечных сечений стержней:
1-й тип P i= 4 0 0 -1 0 "4 м2; 7 i= 6 4 -1 0 -4 м4; Мт=40 кН-м.
2-й тип ^2=250*10-4 м2; У2= 4 0 -1 0 -4 м4; M r = 25 кН-м.
Типыпоперечных сечений для каждогоиз стержней указанына рис. 10.31,a.
Результаты расчета приведены на рис. 10.31, б. На рис. 10.31, в показана эпюра
остаточных моментов, возиикающая после схода нагрузки.
Г лав a
11
М ЕТОД К О Н Е Ч Н Ь К Э ЛЕМ ЕН ТО В (М К Э )
§ 11.1. ОБЩИЕ ЗАМЕЧАНИЯ
Появление ЭВМ резко расширило возможности строительной
Механики, в которой до этого момента в основном рассматривались
стержневые системы. Количественные возможности ЭВМ перешли
в качественные, в результате чего методы строительной механики
были перенесены на континуальные системы (пластины, оболочки и
их комбинации). Метод, обобщающий строительную механику
стержневых систем на континуальные системы, был назван методом
конечных элементов (МКЭ). Этот метод стал в настоящее время
фундаментальным методом механики. Строительная механика стерж­
невых систем может рассматриваться как применение МКЭ в случае,
когда конечным элементом является стержень.
Современный курс строительной механики строится на основе
курса строительной механики стержневых систем и курса теории
упругости. Основные уравнения теории упругости приведены в
§ 8 .8 . В данной главе изложениеМКЭ увязывается со строительной
механикой стержневых систем. Дано изложение МКЭ с энергетиче­
ских позиций, рассмотрен предельный переход уравнений МКЭ
в дифференциальные уравнения теории упругости. Рассмотрены
сложные элементы и элементы для расчета пластинок и оболочек.
В заключение главы приведены особенности вычислительных комп­
лексов по расчету конструкции с использованием МКЭ.
§ 11.2. СВЯЗЬ МКЭ С УРАВНЕНИЯМИ СТРОИТЕЛЬНОЙ
МЕХАНИКИ
Основную идею МКЭ и связь его с уравнениями строительной
механики поясним на примере упругой системы в виде кли­
на, находящегося в условиях плосконапряженного состояния
(рис. l l . l , a ) . Как будет видно из дальнейшего, приводимые ниже
выкладки могут быть отнесены к любой упругой системе. Очевидно,
что перемещения точек клина будут однозначными функциями от
x и у. Перейдем от континуальной системы, напряженно-деформи­
рованное состояние которой описывается непрерывными функциями,
к системе с конечным числом степеней свободы, зависящим от ко*
нечного числа параметров, принятых в качестве степеней свободы.
Нанесем на клин сетку. Для решения этой задачи необходимо на­
нести достаточно густую сетку (сотни узлов), но при этом рисунок
435
перестает быть наглядным. Так как целью данного параграфа яв­
ляется принцип составления системы уравнений, то для наглядности
рассмотрим случай редкой сетки (рис. 11.1, б). Итак, клин пред­
ставлен в виде набора треугольников. Предположим, что переме­
щения внутри треуголь­
ников изменяются по за­
кону линейной функции
от двух переменных (за­
кону плоскости), тогда
между узлами сетки пе­
ремещения будут менять­
ся по линейному зако­
ну, в результате чего
будет соблюдена гипоте­
за сплошности
(тело
сплошное до деформа­
ции остается сплошным
и после деформации).
Таким образом, сде­
лан переход от конти­
нуальной системы (см. рис. 1 1 . 1 , а) к дискретной (см. рис. 1 1 . 1 , б).
Выделим из системы, изображенной на рис. 11.1, б, отдельный тре­
угольник (рис. 11.2, а). В соответствии с рис. 11.2, а перемещения
всех точек треугольника характеризуются вектором
По сторонам треугольника (рис. 11.2, а) будут действовать в общем случае нормальные и касательные напряжения. Эти напря­
жения (adF, TdF) заменим равнодействующими, приложенными в
углах треугольника (рис. 1 1 .2 , б) таким образом, чтобы работа на­
пряжений (adF, tdF), действующих по контуру элемента, была бы
t)
%
Рис, 11.2
436
равна работе их равнодействующих, характеризуемых вектОром
f=
l v . , -
r n /v ,>
ratrVt]T.
( 1 1 .2 )
Каждую из равнодействующих, входящих в вектор r, можно
найти как работу сил, действующих по контуру треугольника при
соответствующем переi
5)
мещении, равном едини- Q'
це. Так, для определе­
ния реакции гщ
^ = ^ ^Hi
--- I
Z\
s) y-ty^
1- й9>
p
~~i
^4
Рис.
^и,»
N
'M
гдеЛ — работа напряже­
ний, действующих по
г)
контуру треугольника
т
(рис. 1 1 .2 , а) при сме­
\
щении (рис. 1 1 .2 , в).
Обратим внимание на
\
то, что в строительной
механике
стержневых
систем внутренние силы
взаимодействия
сосед­
них сечений также ха­
рактеризуются их равнодействующими (обобщенными силами).
Рассмотрим случай растяжения (рис. 11.3, а). При растяжении
возникают нормальные напряжения, которые равномерно рас­
пределяются по сечению. Эти напряжения характеризуются про­
дольной силой N (обобщенной силой) таким образом, что работа
напряжений о равна работе силы N (рис. 11.3, а, б):
J ad F M = NAl.
F
Откуда при A1 =
1
получим
W =$odF.
(11.3)
Аналогично для случая чистого изгиба (рис. 11.3, в, г)
^ аdF уДф = M Дф,
сила переме*
щенне
откуда
М = J ауdF.
(11.4)
В соответствии с формулами (11.3) и (11.4) обобщенныесилы,
соответствующие обобщенным перемещениям Д/ и Дф, равны соот­
ветственно работе напряжений при A /=1 и Дф=1.
437
Итак, если характеризовать перемещения системы перемеще­
ниями узлов, а силы — обобщенными силами, то расчет системы,
изображенной на рис. 1 1 . 1 , б, будет аналогичен расчету стержне­
вой системы.
Составим для треугольного элемента уравнения строительной
механики.
а) Уравнения равновесия (см. рис. 11.2,6)
2 * = 0, r ai + r a2 + r Ui = 0;
2 y = 0, rvi+ r vi+ r vз = 0; >
2 m 0 = 0 , rv a — r a b = 0 .
4
(11.5)
Таким образом, на треугольный элемент действуют шесть сил,
которые связаны между собой тремя уравнениями равновесия.
Следовательно, независимыми будут три силы.
Возьмем в качестве вектора независимых сил вектор
(11.6)
s == [г
^-r
Остальные силы можно выразить через s, используя уравнения
(11.5):
(11.7)
^ -Г
— 7
Запишем связь между векторами r (11.2) n s ( 1 1 . 6 ), используя
зависимости (11.7):
или
>.." ■—01 —1 0“
-p —1
^
Г 0 0 tta
г«»
0 p 0 Иа
ч
0- 1 б _ ^ a J
Г«з
0 0 1_
-Г»з-
(11.8)
r = as.
(11.9)
б) Геометрические уравнения.
■^
~~*
Вектором, двойственным к вектору r ( 1 1 . 2 ), является вектор z
(11.1) (см. § 8.3):
1 ** “*
A = Y ^z.
^
Аналогично, вектором, двойственным к вектору r = [rtti r u% rvy ,
является вектор Д = [и2 «3 у3]т (рис. 11.4):
1 ^ ^
Л = ^ в тД.
438
Тогда в силу принципа двойственности (см. § 8.3)
А = а тг.
(11.10)
в) Физические уравнения. Закон Гука.
Запишем связь между усилиями и деформациями
б.и2>v3 Г«3
U>2
r * . . . яа «... Яз
\
Г«3
и3 = s*3. Яз ^ W Яз
«31 V3
Vz _
A , . «а
б* 3, Яз
а^3. ^3J _ '* . .
ИЛИ
(11.12)
A = br.
Первой строкой матрицы b являются перемещения и2 соответственно
от гЦа= 1 , гПз = 1 , rvз= 1 ; второй— перемещения и3 от тех же воз­
действий и третьей-перемещения v3.
Построим формулы для
вычисления элементов мат­
рицы b. Рассмотрим пря­
моугольный элемент и три
его напряженных состоя­
ния: растяжение вдоль оси
X (ax = con st, рис. 11.5,a);
^ B H r ( T = c o n s t , рис. 1 1. 5 , 6 ) ;
растяжение вдоль оси У
(a^ = const, р и с .1 1 .5 , в).
Предположим, что равнодействующие, приложенные в угловых
точках, равны единицам. Тогда для случая, изображенного на
2
рис. 11.5, а, a* = ^g> а для случая, изображенного на рис. 11.5, в,
2
a ^ = ^ r (б— толщина элемента). Для случая, изображенного на
рис. 11.5, б, горизонтальные составляющие равны единице. Обо­
значим вертикальные составляющие через р. Тогда из суммы мо­
ментов относительно точки 1 будем иметь
(11.13)
Проведем сечения по линиям 2 — 3 (рис. 11.5, a, б, в) и рас­
смотрим заштрихованные треугольники. На рис. 11.5, г, d, e пока­
заны закрепления и деформации этих треугольников при действии
единичных обобщенных сил.
В соответствии с рис. 11.5, а имеем
2a
2 p -i
(11.14)
где б — толщина пластинки;
2u
Ж'
(11.15)
439
Рис. 11.5
В соответствии с рис. 11.5, б получим
^
-
*
-
*
*
-
А
-
Ц
й
1*
-
^
<n-W )
Наконец, в соответствии с рис. 11.5, в имеем:
R
_
26 _ 2P
.
(11.17)
ЕЬ ’
^3i гг.э
^1 --- b
;--- а
“=~
^fA
--- £ 6 '
(11-18)
Подставляя значения перемещений по выражениям (11.14)—(11.18)
в ( 1 1 . 1 1 ), получим
* = Ж
2 p -1
0
— 2pT
0
4 ( l+ (* )p
0
_— 2ц
0
2p
.
(11.19)
J
Таким образом, система уравнений строительной механики для
треугольного элемента имеет вид, аналогичный системе уравнений
для стержневого элемента:
(11.20)
440
Составим систему уравнений строительноймеханикисмешанного
метода для клина, изображенного на рис. 1 1 . 6 , a 1 толщина клина б,
B S + A TZ
( 11.21)
A S + P = 0,
)
где
г = { ъ \ г \ щ \ г { = [ и ,о ,] т;
S = [ S lS lS j S l] r, 5 , = [лй1, rat, r J T.
Матрицы b для всех элементов одинаковы:
1
0
-
0
10,4
0,6
0 ,6 0
(1L22)
0
Тогда матрица В будет иметь вид
b
B =
ь
(11.23)
Общая нумерация узлов указана снаружи треугольников
(рис. 1 1 .6 , а), местная— внутри треугольников (рис. 1 1 .6 , б, e).
Матрицы а (11.8) для элементов (1)—(3) (рис. 1 1 .6 , а) в местной
441
нумерации одинаковы и имеют вид
г—
Г
- 11 —1
-1
00 —
— 22
~
0
~ 0
о
0П1
— 1
f
1
-я точка,
°
2
°
0
\ 2
/ 2 -я точка,
1
0
)
0
(11.24)
l j / 6-я точка.
Направление реакций у четвертого элемента (рис. 11.6,e) про­
тивоположно осям x , у9 поэтому для этогоэлемента матрицу а
надо брать со знаком минус.
Для построения матрицы А
необходимо блоки матриц а,
соответствующие местной ну­
мерации, расставить в соот­
ветствии с общей нумерацией.
Для элементов первого и вто­
рого используются блоки, со­
ответствующие точке 3 , а у
четвертого элемента — блоки,
соответствующие точкам 1 и 2
(еще раз обращаем внимание
на то, что эти элементы не­
Рис. 11.7
обходимо брать со знаком ми­
нус). Матрица А приведена в
та0 л. 11.1. Для получения грузового столбца рассмотрим единич­
ные состояния, приведенные на рис. 11.7, а, б. Подсчитывая работу
равномерно распределенной нагрузки q на единичных смещениях,
получим.обобщенньге горизонтальные силы, приложенные в точках
1 и 3 (см. последний столбец табл. 11.1).
Для решения системы (11.21) может быть использован смешанный
метод, метод сил или метод перемещений. Определим степень стати­
ческой неопределимости системы, изображенной на рис. 1 1 .6 ,a .
Число неизвестных усилий 3-4= 12.
Число уравнений равновесия узлов 2-3 = 6
i = 1 2 - 6 = 6.
Наиболее рациональным методом решения системы ( 1 1 . 2 1 ) яв­
ляется метод перемещений
A B ~ XA ' Z — P = 0.
(11.25)
Построим матрицу, обратную матрице b (11Л9)з
(11.26)
442
Т а б л и ц а 11.1
П ерем е­
щ ени я
s 2
S t ________
|_________ £ з_________ |________ s 4
p
^3
«2
иг
Из
t'3
«2
Из
^3
и2
«3
и
0
1
0
0
0
0
— 1
— 1
0
— 1
0
0
V
0
0
I
0
0
0
0
—2
—1
0
—2
0
и
0
0
0
0
1
0
1
0
0
1
f
0
V
0
0
0
0
0
1
0
2
0
0
2
1
и
0
0
0
0
0
0
0
1
0
0
0
0
V
0
0
0
0
0
0
0
0
1
0
0
0
«3
V*
qa
1
2
qa
3
В нашем случае
ь - 1=
E8
12 (1 — ц2)
г 12
0
l,8 n
0
1,05
0
1,8
0
3
(11.27)
6-*
ь- *
В - 1=
(11.28)
,-l
Перемножая матрицы, получим
АВ~*АТ~=
E8
^^2)X
3,9
26,1
14,4
3,9
—3,9
—24
X
- 8 ,4
—3,9
— 1,05 — 2 , 1
—3
- 1,8
1 2 (1 -
— 24
—3,9
26,1
3,9
- 3 ,9
- 8 ,4
3,9
14,4
— 1,05
- 2,1
- 1 ,8 '
—3
0
1,8
2,1
0
0
2,1
1,05
0
1,8
0
0
3 _l
(11.29)
Матрицу Л # ~ М Т можно построить с использованием поэле­
ментного подхода. Приравнивая второе и третье уравнения си­
стемы ( 1 1 .2 0 ), решая полученное уравнение относительно s иподставляя его в первое уравнение той же системы, получим
r -r z ,
(11.39)
где r = a b ~ xa т— матрица реакций для треугольного элемента.
443
г
Построим формулу матрицы реакций
пр ямоугольного треугольника
Ед
x
12 (1 —и2)
(1-ю 0 " 1
з(I + ц)
для элемента в виде
r = a b ~ xa T =
” 60 + 3
3 (1+Ц)
бр-1+3 (1-д)
^ep
-з (1 -ю
X
I- 6 0
Э|1 - 6 ц
-6ц
-з( i - ц
)Э
-3(1-ц)
-3<1-ц)Р~*
-6p-*
_ -6ц
-6ц
•п
-60-1
0
6ц
0
0
з(1 -ц)
0
I J (1-ц) 0-1
0
I
60-1.
- 3 ( I - ц) II - 3 ( l - ^ 0 ' 1
—3 ( 1 —д) э |[ - 3 ( 1 - ц )
0
60
0
I 0
I 6ц
3 (1 - д )
з( I - ц )
о
(11.31)
Для случая, изображенного на рис. 11.6, а, матрицы реакций
для всех треугольников будут одинаковыми, т. e.
Ги
r=
13,05
3,9
£6
1 2 ( l- n * )
^12
-2 ,1
— 1,05
-1 ,8
r-n
r sl
f*12
^*22
^ 13
^23 =
r*s
Г33_
3,9 — 12
7,2
- -1 ,8
- -4 ,2
- -2,1
- -3
-1 ,8
- 2 ,1
-- 4 ,2
12
0
0
1,8
— 1,05
— 2,1
- 1 ,8 * 1
—3
0
1,8
0
0
4,2 I
Т Г
0
2 '1
1,05
0
•
сГ
3
(11.32)
Матрица R для системы, изображенной нарис. 11.6, имеет вид
г' U(3) Лг а} Л- г (4)
Г ' 33 Г • 22
R =
Г (3> 4 Г- •Г 12
(4)
г {Ъ Ji- '•г (4)
*>1
21
' 32
►
<2> 4 - *»<2) J _ Г<4)
• 21
22
►
(3)
32
«*(3)
_ Г 31
Г r 33
Г '
П
г9 (3)
I^»(3)
9Я
(11.33)
Складывая блоки матрицы (11.32) в соответствии с формулой
(11.33), получим матрицу R , совпадающую с матрицей (11.29).
Итак, система уравнений метода перемещений имеет вид
2,6wi
+3,9yf
-24w2
—3,9^2
—1,05м3 —l,8i-3 — qa
3,9wi
+ 14,4^i
—24 tii
—3,9t^
3,9«!
—8,4^i
—3,9ы2
—8,4^2 —2,1 и3
+26,1^2
+3,9^2
+ 3,9м 2 +14,4t>2 +2,lws
—l,05wi - 2 , l ^ i
4-2,1^2
l,8wi
—Зг3
—Зг,»з
+ 1,8^3
4-l>05w3
+ 3l';
12 f l - L l 2)
К~ ^ } = 0
=0
^0
=0
12 (1—ц2) л
-g fl
£§
0
=0.
Решение системы по Гауссу приведено в табл. 11.2. По фор­
муле (11.30), используя матрицу реакций r (11.31), вычислим
реакции.
444
T абл иц а
11.2
Для 1-го треугольника (см. рис. 11.6, а)
т-—l^ufv, W v .
3,9
7,2
— 12
- 1 ,8
- 4 ,2
- 2,1
—3
12
13,05
3,9
E8
I2 (I-H 2)
X
0
0
0
0
— 12
2,1
— 1,05
- 1,8
-
r»/v,}T
— 1,05
- 2,1
- 2,1
- 4 ,2
1,8
— 1 .8 " 1
—3
0
0
1 ,8
0
4,2
2,1
0
0
2,1
0
1,05
0
0
3
1,8
да
гХ
E6
= qa[ — 1,9947 —3,7116 0,8333 2,3227 1,1613 1,3889]т.
12,0780
__ 5,0556_
Аналогично вычисляются реакции для остальных треугольни­
ков (см. рис. 11. 6 , а). Результаты вычислений приведены в табл. 1 1 .3.
T а б л и ц а 11.3
Реакцни
1-й треугольннк
2-й треугольник
3-й треугольннк
4-й треугольник
^tti
'vi
^ut
Tгг?
Tйз
rV3
— 1 ,9 9 4 7
— 0 ,7 3 5 1
— 0 , 7936
— 0 ,9 3 7 2
— 3 , 7 1 16
— 1 ,6 0 5 6
— 1 ,9 9 8 0
— 1 ,3 2 1 2
0 ,8 3 3 3
— 0 , 4065
— 0 ,2 0 5 7
0 . 6322
2 ,3 2 2 7
2 ,2 8 3 2
1 ,9 9 8 6
0 ,6 0 9 8
1 ,1 6 1 3
1 ,1 4 1 6
0 ,9 9 9 3
0 ,3 0 4 9
1 ,3 8 8 9
— 0 ,6 7 7 5
— 0 ,0005'
0 ,7 1 1 4
Реакции, приложенные к углам треугольников, должны удов­
летворять уравнениям равновесия, поэтому результаты, приведен­
ные в табл. 11.3,'должны удовлетворять условиям (11.5).
Уз
ел1
У
з
е
лJ
Узел 2
А 1,99Щ<Т
11,9966qor
j 0,793Sqcr
\0,2057да
Y
ta
MS322fCT
0,9372qa
*k
j0,6098qtr
1,32Ща\
ШЩд
Г*
b*9S93<,
0,9993qcr
W,6775$or
Ц0005й
0,0005$or
Рис. 11.8
Кроме того, должны удовлетворяться условия равновесия уз­
лов. Обобщенные внешние силы и силы, действующие на узлы со
стороны треугольников, показаны на рис. 1 1 .8 (этисилы противо­
положны силам, действующим на треугольники). Составляя урав­
нения 2 X = 0 , 2 Y = 0 , убеждаемся в равновесии узлов.
:
446
Т а б л н ц а 11.4
Напряж ения
I -й треугольник
2-й треугольни-:
З-й треугольник
4-й треугольник
<7*
0,8333
2,3226
2,7778
—0,4065
2,2832
—1,3550
—0,2057
1,9986
—0,0010
0,6322
0,6098
1,4228
°иУ
т
На рис. 11.5, а, б, вприведены значения напряжений от единич­
ных сил, приложенных в углах. Формула длявычислениянапряжений через независимые реакции имеет вид
'2/66
Ч с ’
о„
У
X
--
0
0
0
2/a8
0
0 '
0
(11.34)
2/аб
L*V
Для 1-го треугольника (1) (см. рис. 11.6, а) получим
"0,8333"
0,8333"
1,1613 _ я _ 2,3226
0
2
0
~ s
_T
0
0
2
1,3889
_2,7778_
Аналогично находятся напряжения и в остальных треугольниках. Результаты вычислений приведены в табл. 11.4.
Обратим внимание на то, что
полученные эпюры постоянны внут­
ри каждого из треугольников. Та­
ким образом, эпюры напряжений
для всей области носят ступенча­
тый характер. На рис. 11.9 изоб­
ражены перемещения узлов клина.
Рассмотрим далее пластинку,
разбитую на прямоугольные эле­
менты, изображенную на рис.
11.10, а. Как и в предыдущемслучае, рассмотрим редкую сетку.
По конутру пластинки и в центре
показана общая нумерация узлов
пластинки. Каждый узел сетки
имеет две степени свободы (ut—
перемещение узла i вдоль оси X
и Vi— перемещение того же узла
вдоль оси Y , i — номер узла в гло­
бальной нумерации).
Перемещения всех точек плас­
тинки характеризуются вектором
~а х ~
_±
ау ~ 6
"1
0
0
г = [г\ г\ . . .
гЦ , г { = [щ V iY -
Часть из перемещений равны нулю (« 5 = ^ 7 = ы » = у » = 0 ).
447
Таким образом, пластинка, изображенная на рис. 11.10,#, име­
ет 2-9—4 = 14 степеней свободы. Составим для этой пластинки урав­
нения равновесия. Для составления уравнений равновесия восполь­
зуемся принципом возможных перемещений, т. e. система находится
в равновесии тогда и только тогда, когда сумма работ всех сил на
любых возможных перемещениях равна нулю, при этом под возмож­
ными перемещениями понимают перемещения, удовлетворяющие
двум следующим условиям:
перемещения должны быть бесконечно малыми;
перемещения должны быть совместными со связями системы.
В дальнейшем будем рассматривать не бесконечно малые, а
малые перемещения, что соответствует расчету по недеформированной схеме. Второе условие означает, что перемещения должны
удовлетворять внутренним связям (условию сплошности— тело
сплошное до деформации должно оставаться сплошным и после
деформации), а это означает, что функции перемещений должны быть
однозначными (непрерывными) во всей области внутри пластинки
(как внутри элементов, так и между элементами). Кроме того, они
должны удовлетворять внешним связям, наложенным на пластин­
ку (u5= V7= U 9= ^ V Q = 0 ).
В качестве параметров для составления уравнения равновесия
—
У
используем координаты вектора z. Зададим последовательно каж­
дой из точек единичные перемещения (на рис. 1 1 . 1 0 ,бпоказано
единичное перемещение Wi=l). Очевидно, что таких независимых
единичных перемещений можно составить столько, сколько степе­
ней свободы имеет система. В соответствии с принципом возможных
перемещений составим выражения для работ. Сумма работ всех
сил должна быть равна нулю, следовательно, работа внутренних
сил должна быть равна работе внешних. Работу внутренних сил
выразим через матрицу реакций, а работа внешних сил численно
равна обобщенной силе, так как узлам заданы единичные переме­
щения.
Итак, уравнение для работ имеет вид
Rz = P,
448
(11.35)
где R — матрица реакций, элементами которой являются обобщен­
ные реакции в точках при единичных смещениях этих точек;
z = [uxVi u 2v2 u 3v3 uj)x vb u 6ve щ ы8 р8]т — вектор обобщен­
ных перемещений; P = f- ^ 0
00 00 00 P 2 00 0 00]т — вектор
внешних сил.
Таким образом, для нахождения перемещений необходимо
составить и решить систему уравнений (11.35). Процесс построе­
ния матрицы R можно проводить поэлементно.
4
Рис. 11.11
Рассмотрим прямоугольный элемент и введем местную нуме­
рацию узлов (чтобы отличить местную нумерацию от общей на
рис. 1 1 . 1 0 , 6 , цифры, соответствующие местной нумерации, рас­
положены внутри элементов). Построим матрицу реакций для
одного элемента. На рис. l l . l l , a показан элемент и характери­
зующие его деформированное состояние обобщенные перемещения,
а на рис. 1 1 . 1 1 , 6 — соответствующие им обобщенные реакции.
Перемещения всех точек элемента характеризуются вектором
z = fzj
г\
zJ
zf]T,
(11.36)
г д е 2 ? = [ « ; О;]; t = l, 2, 3, 4.
Двойственный ему вектор обобщенных реакций имеет вид
r = frf 71
где 7] = [гЯ/
r„.]; i = 1,
2
rl
rlf,
(11.37)
, 3, 4.
Обобщенные реакции связаны с обобщенными перемещениями
соотношением
~~ —_> —
“
r^ н
zi
Г1
Гч r i, г13 Гц
^>
^
^2
Г2 "~ r , i ^22 Гм Ги
(11.38)
-> = rz,
->
Z3
r3
Г зi Г 32 г33 r 3i
^
^
_r* _
. r * i г и r i3 ^44_ _ 24 _
449
15 № 2 4 1 8
где
ГгаЛ
= L '
;
r
r ,y -
9 v. |
L
iJ
гнд,л
"
' v>u .
L
i j
"
'v.v, I
i /J
Прежде чем строить матрицу л, остановимся на некоторых ее
свойствах. В силу теоремы о взаимности реакций r ^ = rJi, т. e.
матрица реакций является симметричной и полностью определя­
ется ее нижнетреугольной частью:
'Г ц
r =
r tt
r*t
J u
'
22
Г 32
^42
Г зз
^43
44_
Первым столбцом матрицы г являются реакции, возникающие в
точках 1 , 2 , 3 , 4 от единичных смещений первой точки. Введем
обозначения для блоков первого столбца:
r i i = i 4 i i J r 2i = ^ 2l> f*31= ^ 3 li f*41= ^4i*
В силу теоремы о взаимности реакций и двоякой симметрии пря­
моугольника (относительно осей X и Y) матрица r будет сим­
метричной по модулю матрицей как относительно главной, так и
относительно побочной диагонали (в симметрии модулей элемен­
тов относительно побочной диагонали можно убедиться, повора­
чивая элемент относительно осей X и F). Блоки реакций, отли­
чающиеся тоЛько знаками в матрице г, обозначим одинаковыми
буквами:
'Ап В±2 ^i3 D u l
^22
#2 i
^23 ^ 2 4
r =
(11.39)
£ 3 1 ^32
^33 ^34
^42 ^43 ^44_
D*
Модули всех элементов матрицы r полностью определяются
элементами первого столбца. Разные индексы указывают на раз­
ницу в знаках. Для установления знаков построим три оператора
знаков. Разделим перемещения на две группы. Для того чтобы
установить, к какой группе относится то или другое перемещение,
перегнем элемент относительно оси Y (рис. 11.11, а). В результате
этого точка 1 наложится на точку 2 , а точка 3 — на точку 4 . Если
положительные направления обоих перемещений совпадут, то от­
несем их к группе / , если не совпадут — к группе 2 . Аналогичную
операцию можно провести и относительно оси X. Итак, имеем
Ось Y
Ось X
450
Группа 1
Группа 2
v
и
Группа 1
и
Группа 2
v
Построим операторы для получения знаков второго, третьего и
четвертого столбцов по знакам первого столбца. Для построения
оператора 2 используем левую из приведенных схем деления персмещений, а для получения оператора 3 — правую.
Оператор 2
Оператор 3
Оператор 4
I Ц I v
и jb
V
—
—
~
1u 1P
и 4^
V
—
—
~
1 Ц 1P
и +
+
V +
+
Знаки операторов 2 и 3 устанавливаются по следующему правилу:
на пересечении строки и столбца ставится знак (+ ) втомслучае,
если перемещения, стоящие сверху и слева, принадлежат к одной
группе, в противном случае ставится знак (—). Для получения
знаков оператора 4 необходимо оператор 3 «наложить» на оператор
2 , причем, если знаки совпали, то в соответствующее место опера­
тора 4 ставится знак (+ ), в противном случае — знак (—). Опера­
торы 2, 5, 4 служат соответственно для получения знаков второго,
третьего и четвертого столбцов матрицы r по знакам первого столб­
ца. При этом для получения знаков второго столбца необходимо
«наложить» по приведенному выше правилу оператор 2 на знаки
элементов первого столбца, для получения знаков третьего столбца
надо «наложить» оператор 3 на знаки первого столбца и т. д.
Блок первого столбца А1Х в силу теоремы о взаимности реак­
ции является симметричным блоком. Остальные блоки ( В 21,
D a ) в силу симметрии прямоугольника являются симметричными
по модулю. Для установления знаков элементов, расположенных
выше главной диагонали, необходимо на знак элементов, распо­
ложенных ниже главной диагонали, «наложить» части операторов,
расположенных ниже ступенчатой линии. Таким образом, элемен­
ты, расположенные на главных диагоналях и ниже в блоках
Ац> B 2fy Cgi, X>4 1 , полностью определяют всю матрицу r для
прямоугольника, поэтому эти элементы будем в дальнейшем на­
зывать исходными элементами:
С3ь
Построим блоки первого блочного столбца матрицы реакций.
Вычислим реакции, которые возникнут при смещении и±= 1
(рис. 11.12, а). Будем считать, что по отношению к прямоугольному
элементу справедлива гипотеза плоских сечений. На рис. 11.13
показана деформация прямоугольника. Д о деформации прямо­
угольник занимал положение 1 — 3 —4— 2. После смещения точки 1
на единицу по горизонтали и неподвижных остальных точках пря­
моугольник займет положейие I"' —3 — 4 —2 . Эту деформацию мож­
.15*
451
но представить в виде суммы трех деформаций: сжатия на Ч2 (см.
положение V — 3 '—4 —2 ); изгиба, при котором крайнее нижнее
волокно укорачивается на V2, а верхнее удлиняетсяна^/г, при
этом точка «к» смещается на Д (см. положение 1 " —3 " — 4 2)\
сдвига, при котором точка «к» воз­
вращается в точку «к'».
Рассмотрим каждую из дефор­
маций в отдельности.
Сжатие (рис. 11.14, а). Вычис­
лим обобщенные силы N и S, при
Рис. 11.12
Рис. 11.13
действии которых сторона 1— 3 перемещается по горизонтали на
1/ 2, а остальные стороны не перемещаются. В соответствии с обоб­
щенным законом Гука для плоского напряженного состояния имеем
° X
*)
N
N
I _ ^ ( s *
+
psy)*>
а ^ ~ 1 _ м 2 ( 8 «/ +
И
m
Рис. 11.14
452
^ 8 л;)
В нашем случае
1
®*
n
2a ’ ^У
Е
1
~
1 —ц2 2a ’
®x
2N
2S
Б
b
Учитывая, что ах= ^ - ; ау= ^ - ; Р = — ,
элемента, получим
2N
E
I
u
» — 1 —ц2 &Г*
кт
где
£6Р
.,.
1—ц2 2a ’ откУДа N — 4(1—ца) *
66
25
E
u
с
б — толщина
£6ц
, лч
(11.40)
/л 1 , 1Ч
^ s - = T = iT * 4 ' откУда 5 s s 4 ( i - V ) •
(1L41)
Изгиб (рис. 11.14 ,6). Дифференциальное уравнение изгиба
имеет вид
7 -T & --
(1М 2>
В соответствии с рис. 11.14,6
0 = р Д Ф= р ^ = £ ,
откуда p*=ab.
Подставляя (11.43) в (11.42), получим
1
Af
ab ~
1
EJ
’
(11.43)
Pb
аЬ~ ~ Е № / \ 2
9
откуда P = E8fi/12.
Вычислим перемещение А:
*
(11.44)
M a2
2EJ
а*
“
1
2ab
2p *
Сдвиг (рис.14, б). Для равновесия момент от сил T должен
быть равен моменту от сил Q, 2 T a = 2 Q b , откуда
Q = T7p.
По закону Гука имеем
я
“
__
E
A
2 ( 1 + И) V - 2 ( l + n )
2Г
66
£
а -
E
I
4 ( 1 + ц ) Ра 5
1
4 (1 +^) ра *
откуда
Ffi
г-тгттхтг;
8<l+rt
(11.46)
Ей
«-Щ Г +Д '
(11.46)
Для того чтобы определить реакции при единичном смещении
m * = l (см. рис. 1 1 . 1 2 ,a ), необходимо сложить напряженные со­
453
стояния растяжения, изгиба и сдвига (см. рис. 11.14,a, б, e)i
г»Лх- N + P + Q - к [(4 - p*) p + 4 ( 1 - p) £-* ] ;
гк,а,= S + Г = fe у 0 + P)">
r uiai — — N — P + Q = k [ — (4 — р*)Р + у ( 1 — р )р -1]. ;
r ^ = S -T = ^ 4 (l-3 ^ );
Гп,и,— М
P — Q =k
(11.47)
[(2
+ ^ ) P — | ( l - y ) p - 1] ;
^ , a i= — s + T = k ^ a - З ц ) ;
rejh:------W + P + Q = * f
- ( 2
+ ^ ) P - 4 (l-^ )(W j;
l vlttx
где
£6
k = 12 (1 — ^ 2) •
Реакции, возникающие прргсмещении точки 1 на единицу в на­
правлении оси у (см. рис.. 1 1 . 1 2 , б), могут быть получены заменой
в выражениях (11.47) p на l/p, ина v , и наоборот.
т
Покажем далее, как,
имея матрицу реакций для
(m-f)n элемента, построить мат­
рицу реакций для всей сис­
7\
i-U n
i+n
l+ fm
темы. Для получения урав­
нений (11.35) удобно рас­
4 '+fi
,
Ы
сматривать не каждое урав­
*
>
нение, а выделять группы
уравнений, относящиеся к
L-n
i-f-n
L+f-Л
одной точке. В. дальнейшем
эти группы будем”называть
а
n-t
блочншми строками. Число
уравнений, входящих в од­
Р и с, M.U>
ну блочную строку, рав­
но числу стеиеней свободы
в угловой точке элемента (в нашем случае число уравнений равно
двум, каждая точка обладает двумя степенями свободы). В каждую
блочную строку входят только те векторы перемещений, которые
вызывают реакцию в точке, соответствующей этой блочной строке.
Такимобразом, в блочную строку, относящуюся к i-й точке, входят
^
векторы zK, где к — номера точек, окружающих точку iy включая
точку i (рис. L1.15). По матрице реакций для отдельного прямоуголь­
ника [см. (11.39)1, складывая соответствующие блоки матриц реак­
ций прямоугольников, окружающих точку i (см. рис. 11.15), соста­
ш
Ш
шSSi
454
вим огарягор, приведенный на рис. 11.16. «Накладываш этот опе­
ратор на узлы сетки и перемножая векторы перемещенщ| э*зловсетки
z т блоки оператора, получим искомую систему уравнений. На­
пример, накладывая оператор на точку i, получим
^tfl^/-l-n^"'(^8l4"'C ff2) ^ / - « “Ь ^32^ l+ i-л ~Ь (^2 l ~Ь ^4з) ^ / - l 4 " 2 ^ / ; 2 / ^ + ( S l 2+ ^
34 )
^/+ .1+ ^28г |- 1 + » + (^13 + ^24) Z <+ rt+ A u*i + l +rt= ^ *
(11.48)
После того как построена система линейных уравнений, которая
имеет ленточную структуру, решается зта система и определяются
векторы перемещений всех
^
узловых точек z. По этим пе­
ремещениям через матрицы
реакций отдельных элементов
[см. (11.38) ] определяются
обобщенные реакции, дейст­
вующие в узлах прямоутольного элемента. По обобщен­
ным реакциям, используя фор­
мулу сопротивления материа­
лов для внецентреннего сжа­
тия, можно найти нормаль­
ные напряжения в любой
точке:
_ ^as4"^a* . (^Ui ^иг) ^ / 2
rU2~jT rui , ®(ru4 ru2)
x—
55
5
WJT2
y=z
Ш
1
ЬЧ
У'
____ *Va^*V*
fjvi rVz)®№
rVz~^~rVi , ^ ( rVi rVt)
^У
c6
‘
6й3/12
a6
*
а2д
X'
1
^
Касательные напряжения во всех точках элемента одинаковы
и равны
Т
^Н.ч~Ь rtti
аЬ
Г%
>2^" rVi
b6
Обратим внимание на то, что рассмотренный треугольный эле­
мент является совместным с соседними элементами и соответствую­
щее ему поле не имеет разрывов. Поле, соответствующее прямо­
угольному элементу за счет искривления кромок (см. рис. 11.13),
имеет разрывы и, строго говоря, к этому тюлю нельзя применять
принцип возможных перемещений. Однако этет несовместный эле­
мент дает хорошие результаты.
В настоящее время разработана теория несовместных элементов,
которые в некоторых случаях дают даже лучшие результаты, чем
совместные. Эта теория выходит за рамки учебника и на ней оста­
навливаться не будем.
455
§ 11.3. ПОСТРОЕНИЕ МАТРИЦ ЖЕСТКОСТИ ДЛЯ РЕШЕНИЯ
ПЛОСКОЙ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
Как следует из предыдущего параграфа, процесс расчета кон­
тинуальных систем принципиально не отличается от расчета стерж­
невых систем. При этом для расчета необходимо иметь матрицы
_
жесткости. В предыдущем параграфе по/N ^
строены матрицы жесткости для тре*'
* ^
угольного и прямоугольного элемента
?
с использованием формул сопротивле\к
г
д
Л ния материалов. Этот подход является
очевидным, но не общим. Остановимся
далее на общем подходе построения мат­
рицы жесткости, основанном на состав­
лении выражения для потенциальной
:
энергии.
Рассмотрим элемент в виде произ­
Рис. 11.17
вольного треугольника (рис. 11.17).
Для построения матрицы жесткости необходимо задаться полем
перемещений и выразить его через перемещения угловых точек тре­
угольника. Обычно поля перемещений задаются в виде полиномов,
число коэффициентов которых равно числу степеней свободы:
u ( x y ) = a i + a^x + a ,y ,
v(xy) = a t + a bx + a 6y
или в матричной форме
z(xy) = L(xy)a,
(11.49)
где
*(*У)
=[:
{Xy)1
(xy) j ’
V Г1 *
(*У) - [о о
У
0
0
0
—У
а= [щ a a a , ос4 а 5 а 6].
1
x
п
L
ь
Получим выражение для полей перемещений через вектор пе­
ремещений угловых точек, для чего выразим вектор коэффициентов полинома a через вектор перемещений угловых точек
рис . 11.17), получим
«1
Vi
или
«.
^2
Ы3
L^3_
"1
0
1
0
1
_0
Xi
0
yt
0
*2
0
lh
0
*3
У»
0
0
0 0
1 Xi
0 0
1 *2
0 0
1 *»
*+
~>»
z = La.
456
0-
a,
Уг
as
0
«3
У2
“ 4
0
“ 5
У з.
(11.50)
L “ «_
(11.51)
Решая систему (11.51) относительно а, получим выражение
(11.52)
Для определения коэффициентов а необходимо, чтобы матри­
ца L имела обратную. Матрица L должна быть квадратной, т. e.
число коэффициентов полинома (11.49) должно быть равно числу
степеней свободы и det L Ф 0.
Вычислим определитель матрицы L. После перестановки строк
будем иметь
d e tL = d e t
ft :j
= det Lx det L it
где
L^ =
"1
*f
уГ
1
^2
Уг
1
хя
Уз
.
Детерминант матрицы Li есть удвоенная площадь треугольника
1 2 3. Очевидно, что detZ^ = 0 только тогда, когда площадь
треугольника 1 2 3 равна нулю. Таким образом, матрица L явля­
ется невырожденной матрицей для любого треугольника.
Подставляя (11.52) в (11.49), получим поле перемещений,
8 аписанное через перемещения угловых точек:
z (xy) = L (xy) L
xz.
(11.53)
Для треугольника можно сразу записать поле перемещений
(11.53), не решая системы (11.51).
Запишем поле перемещений в виде
u(xy)'
«1
Vi
x (xy)
0
n2 (xy)
0
n 3 (xy)
0
П
г(xy)
0
пг(xy)
0
Если считать перемещение и1= 1, а остальные перемещения угло­
вых точек равными нулю, то получим
n (xy) = пг(xy).
+
457
Таким образом, tii(xy)— есть поле перемещений u(x y ) , ордината
которого равна едииице в первой точке и нулю во всех осталь­
ных точках. На рис. 11.18,a построена функция tii(xy).
Запишем уравнение прямой, проходящей через точки 2 и 3 :
У— У2 = х — х2
Уз — У2
*3—Х2
ИЛИ
iy
У2) (^3
^2)
(*
^a) (Уг У2) = 0*
Тогда
M * y )= W (y -y * ) (хз— х2)— (х— х3) (у3—у2)].
(11.55)
Очевидно, что если в уравнение (11.55) подставить координаты
точки 2 (х2у2) и 3 (x3y 3), то функция tti(xy) будет принимать нулевое
значение (функция пг
(ху) принимает нулевое значение во всех точ­
ках, лежащих на прямой 2 —3). Для определения коэффициента k±
подставим в формулу (11.55) координаты точки 1 (лг^/х). При этом
функция n t = l . Отсюда
* i =
l / [ ( y i — y 2) ( * 3 - * 2 ) - ( * i - * a )
(У з —
г / 2) ] .
Вводя обозначения y t—у/=у{/, x t—x j = x u , получим
« 1 (xy)=l(y-yt)
x 32— {x— x 2) y S2]l(2F),
(11.56)
где F — площадь треугольника 123. Аналогично строятся функции
rti(xy) и п3(ху) (рис. 11.18, б, в). Эти функции могут быть получены
из функции Tii(xy) с использованием круговой подстановки индексов:
п2(ху)=\(у— у3) x13— (x— x 3) y 13]/(2F);
n s(xy)=lte— y 1) x 21— (x— x1) y 21}!(2F).
458
(11.57)
(11.58)
П о д с г а в л я я ( 1 1 .5 6 ) — (1 1 .5 8 )
в
( 1 1 .5 4 ),
получим выражение для
п о л я перемещений z(xy), записанное через перемещения угловых
точек 1, 2 r 3. Используя уравнения Коши (8.103), по полю переме­
щений построим поле деформаций
Г
e*
^
~"
н
t"b
У , *^~
e=
ди
0
dftj (*.'/)
ду
дп2 (xy)
дх
0
дпх (xy)
ду
dni (xy)
дх
ди
+ дх
~ ду
Y
dnj (xy)
дх
^т
ди
дх
ди
~Щ*
дп3 (xy)
дх
0
дп2 (xy)
ду
dn -2 (xy)
дх
0
дпг (xy)
ду
0
д п 3 (xy)
ду
0
дп3 (xy)
ду
д
п
-ъ(xy)
дх
z=Bz',
(11.59)
2 * W L = — y 32/2F = y,j2F, l * $ L = ХзЛ2F);
i ^
- = - y 13/2F = y J 2 F , ^ f L = x lsf(2F) 1
^ s M . = - y j 2 F = yj2F, ^ й
(11.60)
. = xa t(2F).
Подставляя (11.60) в (11.59), получим
j_
B = 2F
Уъз
0
У 3i
0
V i2
0
0
Х 32
0
*13
0
*2l
Х 32
У 23
*13
Уз1
*21
■
W B-
(11.61)
У\ 2
По полю деформаций, используя матрицу закона Гука (8.113),
построим поле напряжений
a =
^
а.
= De = ^pD B z.
(11.62)
Запишем выражение для потенциальной энергии
П
- J ат edy - б J от e dF,
( 1 1 .6 3 )
где б — толщина элемента.
459
П о д ст ав л я я в
—
►
e по выражению
(11.63)
значение
(11.59), (11.61) и
а по выражению (11.62), получим
(11.64)
Элементы матрицы В не зависят
от x , у, поэтому можно записать
n=f^pFDB*z.
(11.65)
С другой стороны [см. (9.42)],
n ^ R z .
(11.66)
Сравнивая выражения (11.66) и
(11.65), можно записать
R = ^p ВтD B .
(11.67)
^
Подставляя в (11.67) значения
Рис. 11.19
В и D y построим матрицу реакций,
приведенную в табл. 11.5.
Построим далее матрицу реакций для прямоугольного элемен­
та, изображенного на рис. 11.19,a:
и(£n) = пг(£п) щ + п2 (|г|) ыа+ п3 (|г|) и3 + n4 (£п) и4;
v (£п ) = n t ( ir j) Vi + п 2 (|г|) v2 +
п3 (Ел) v3 +
и 4 (|Г|) У4
(11.68)
или в матричной форме
ы (|т |)
2 (Ел)=
и(Ел)
0
Ч (£ п )
0
пг(Ел)
«2
(£л)
0
0
«3 (^Tj)
0
«4 (£л)
0
п2 {1ц)
0
n 3 (lvi)
0
n4(gr^
Для построения функций п$ (|г])
(рис. 11.19, б):
рассмотрим
^
Z.
функции Ф
<Di(S) = i o - S ) , Ф1(л) = 4-(1-л);
(11.69)
Ф * (£ )= т О + £ ).
Ф .( л )= т 0 + л ) -
Функции n,-(lrj) могут быть построены как произведения функ
460
T а б л и ц а 11.5
vU +
J__ M^ г2
2
32
1 ~Ь M
*
--- 2—‘ *32^23
1+ Ц
^ 2 ^ Х32У2З
*згЧ" Ц ^ У 3 2
^23^31“]
У\гЛ
1— ц
1— ц
FCi3*/23- ;---- 2—*3s$3i *13*32^- ^ T ^ 1/23^31
4 p
2^~ xi9
1
x13y3i
#12#2з4"
1—u
2 *32*2l
I — [X
ц % ь + ^ ^ *320Й
1— Ц
Ц^зг^гЧ ----2 ^ *2l*23
1— ц
*32*2l4- —2— ^i2^23
I+ Ц
—2— *i3^3i
I-fl
W i 2 + —2— Х2Й З
I—ц
^^2l^3i4-— 2— ^is^i2
у2 4 - ^ *i2
*i3 T
2 *31
I —Ц
№ з № 4 - — 2— *2i^ 3I
M"^32^3iH---- 2~^ *13^23 х13х32“1
1— ц
1 — м#23^31 + --- 2— *13*32 М^заУзхЧ— 2 ^ З Д г з
^12^234"
2~^ *13*32 Ц*1зУгзЧ---- 2 -^ ^32^3i
2 ^ УгзУп
I —ц
1— ц
2--- *32*2l И^заМгЧ---- 2— ^21^23 Й ^ 1 2 т Ц ^ ^ 2 Й З М ^ а И г + Ц р - З Д
& +
31
1
— ^ y2
2
21
1 -f* ц
—2— *ti9 it
1—Ц
1—Ц
^21^2S4----- 2 ^ *32^l2 *32*2lH" ---2"^1 ^l2^23 ll^21</3l4—~ 2 ~^ х ш и *2 № з + Ц ^ У з Ш г
Множитель к таблица
Ed>
4 (l-n * )f
x2ixi3^- ^
2
^ ^зШа
1+ ц
H p *гШа
*L+
Д— ^ ц 1
2
^ 12
ций Ф
«1 (£л) = Ф
«2 (£Л)
1 (1 )Ф 1 (л)-= т О
- - 5 ) ( i —л);
= *.6)4>i (л) = T ( l + 6)(1 —л);
(11.70)
«з (£л) -<ME)-<D, (л),= T ( 1-- l ) d + л);
«4 (£л) = Ф,№)Ф. (л) = 4 d + i)( l +л)П о ф орм улам К ош и
1
drtf
о *¥e*
дх
дх
dri\
—
о
0
8v
~W
drti дп2
drti
А%
Y
дх
ду
lS W
(8.103) имеем
дп3
дх
о
4^
0
ду
дп2
дх
dns
ду
drtj
0
~дГ
дп3
0
ду
дп3 дпА
дх
ду
0 "
дп
z = B z . (11.71)
ду
dn$
^T _
4
В нашем случае матрица В имеет вид
0
0
В
0
s < 1- ^
0
- i v - i )
- ^ 2aо - л )
0
йО +л)
0
2b
^ ( 1 — Е)
~ 2 Ь ( 1 + “)
^ ( 1
(l-E)
— ^ О + л )
0
+ Л)
°
2 ^(l+ l)
9hO + E)
26
J_
9^ (1 “Г ^l)
2a
(11.72)
При вычислении производных использовалась формула диффе­
ренцирования сложной функции:
дп; _ drij d£
дх
д1 dx *
£= —•
а ’
Для
Ъщ _ дп/ dr)
ду
дг\ dy ’
п = ?^- $ к = — - ^ _ J L
* b 9 dx
а 9 dу
b
вычисления матрицы реакций воспользуемся формулой
b/2
r=
J
a/2
1 1
J B'DBdxdy = ^ ^
- b / 2 - a/2
§ B TD B d|dr].
-1 -1
(11.73)
В табл. 11.6 приведены элементы матрицы реакцийдля прямо­
угольного элемента, показанного на рис. 11.19, а. Матрицыреакций, полученные в данном параграфе, соответствуют непрерывным
полям перемещений между соседними элементами. Структура мат­
рицы r соответствует выражению (11.39) и операторам знаков,
приведенным в предыдущем параграфе.
462
T а б л и ц а 11.6
40 +
+
^
0
| ( З ц - 1)
+ (l_H )p-J
(1 - ц ) р - »
2
-4p +
+ц)
4p"* +
у ( ] +И)
— 4p4*
+ (l-^)p -l
2
+
2
2
p -
2
(I-^)p-*
4p +
2
p -i-
2
—
(l-n )P
2
^1
— ~2
+
-
2
p -
-4p-4-
4
o+M)
+ (1-(X)P
-
2
p -
-(l-^)P
'—
2
^1
~^^
2
-|(» + ц )
-
2
p - 1-
-(l-fx) Э
-J
p -i-
2
-4 (3 (i-l)
|(Зц-1)
2
p -i-
— ~2
(1
+ нО
+
(l-M)P
"(i + ц )
—2р-*—
2
p -
4 (3 n -u
(l-rtp
-4p-^ +
-4 (3 ,-D
0-Ц)Р
— ~2
( 1
-4p +
-4 (3 ^ -0
+ (l-(x)p-i
4P“ J +
+P)
+ 2
-4p +
(1
2
4(3^-D
— ц) P
p -I-
-2 (l-(i)P
4p +
4 ( ^ - i)
~2
0
+P)
+ 2(1-^)P-*
+ (1 - ц ) р - *
-4p-* +
2
+ ^
(1 - ц ) р - >
— ( l-H-)P
2P-
( 1
-
2
— (1— M-) P
-
+n)
4p +
+
2
Y
"
- 4 d + r t
" 1
_(I_^)P
т^О +K)
-
(1
p -
-ц)Р
0
(1 - ц ) Р
2
<l-(x)p
-2 (I-tfP
" 5
-2 P -
4p-* +
^ ^
-(l-(x)p-i
~ |(З ц -1 )
_4p-* +
+
-
2
-(l-H )P
4(Зц—0
+M^
" 1
(l-ji)p
|(З ц -1 )
( 1
-
-4 (3 fi-3 )
( 1 - ц) р - х
2
p -i-
p -
-2(1-ц)Р
-|(З ц -1 )
y (3 ^-l)
-
- j f t - l )
+ 2(l-(x)P
2
2 0
-4 (3 ^ -l)
-
2
-* —
Y
0
(l-fi)p
Множитель к таблице
£6
12(1—цЛ) : P
4Р "
+нО
+
2
1
+
(l-p )P
§ i l .4 . ПРЕДЕЛЬНЫЙ ПЕРЕХОД ДЛЯ ПЛОСКОЙ ЗАДАЧИ
В § 11.2 получена система алгебраических уравнений для
точки i (11.48). Покажем, что при стремленииразмеровэлементов
к нулю (а— A x ^ - 0, b = A y ^ - 0) система алгебраических уравне­
ний (11.48) стремится к системе дифференциальных уравнений
(8.116). На рис. 1 1 . 2 0 , а изображены четыре элемента, примы­
кающих к точке i. Предположим, что перемещения меняются
с>
~
?4
S)
" j~
ii
Zf
^T
.yл j
*u_ ~^21
-d2f $22
?cu
2b^
4firt
i1
J lL ^ L
- C22
lb22
4a22
A ,
Q'22
Ж
Zt>22
=^
^J
if dft &2f
7s
Ax
Ax
2Cft
~
~^2i
^21 ^22
?C2?
'^2f d?2
"■♦•
Ax
Ax
--- > ^ —
<—
--- >■
-9
Рис. 11.20
плавно. Тогда, применяя формулу Тейлора, можно выразить
перемещения в точках 1— 8 (рис. 1 1 .2 0 , а) через вектор z и его
производные:
Ал:2
zx = z + z'xA x + zxx 2
za = г + z x’A x + z'yAy + z"xx
Ax2
"r^(^*)>
z'xy A x A y + z"yy ^ - + 0 (A3);
(11.74)
Ay-
Как следует из предыдущего параграфа, поле перемещений при
решении плоской задачи является непрерывным по перемещениям
и терпит разрывы в первой производной, поэтому, строго говоря,
нельзя вычислять производные. Заменим производные конечно­
разностными выражениями (центрально-разностными):
~ u3— u7 ~
~ui — u$~
^
2Ax
2Ay
z—
; zx =
> Zy ~
Vs
— Vi
vi — v5
V
L 2Ay J
- 2Ax ^|
Ue— Ug— U4 + U2
u5— 2 u ± u i
" u j — 2u + u3~
~
>
A y2
Ах Ау
Axl
~" __
Z~y --->
z
yy
~
v i~ 2 v + v 3
Р5— 2v^-Vi
Щ— ^8 — ^4 ~h v2
J
Ay$
АхЪ
J
Ax Ay
u
~¥
(11.75)
464
При Длг^О, A y ^ h 0 приведенные выше кайечно-разностные выра­
жения перейдут в производные
~>
и
Z =
V
^ д 2и~
дх2
d2v 9
-d x 2-
XX
д
и
д
и
д
у
д
х
Zx =
^ *
д
и
dv
LdyJ
- дх~
~ д2и - д2и *
дх ду
ду2
%ХУ->
*yy
=
d2v
d2v
~дх ду~
- ду2~-
(11.76)
Для остальных точек выражения для векторов перемещений
Z f ( i = 4, . . . , 8 ) отличаются только знаками [см. (lL74)J: точка 4
(— Ах, Ау)\ точка 5 (—Дх, 0); точка 6 (—Дх, Ау)\ точка 7 (0, — Ау)\
точка 8 (Дх, —у).
Как показано в § 1 1 .2 , матрица r для отдельного прямоуголь­
ного элемента в силу его симметрии может быть представлена в
виде (11.39).
Используя операторы знаков, приведенные в § 1 1 .2 , запишем
матрицу реакций через исходные элементы
*■>
aii
a 2i
r=
bn
b2 i
^21
^22
— ь21
^22
^111
^2l
^21
^22
d\i
J^2l
d 21
d22
b2i
b22
bn
— b2i
cii
^21
^lf
^21
^21
^22
d2i
d 22
da
d%i
^21
cit
^21
^22
^21
C*2
— «21
bn
b2i
— bn
b2.
a ii
azi
^21
d\\
d 2i
d% 1
d 22
^2l
^22
Cii
^21
bii
b2i a n
^22 ^2 i
^22
a xi
b2±
(11.77)
^21
^2l
^22_J
Используя (11.77), запишем оператор, изображенный на рис. 11.16,
через исходные элементы (рис. 11.20,6). Накладывая центр этого
оператора на точку i (рис. 1 1 .2 0 , а), а также используя разложения
( 1 1 . 7 4 ) и приводя подобные члены, будем иметь
0
и
[
4 (а 22 ~Ь ^22 ~Ь С22 + 4>2) _
Дх2 Г 4 (6 ji + dn)
2"L
0
by'
^22
4 (сц+ ^n)
0
0
UXX
4 {b22 '' d 22) . IV XX
0
^ (^22 "Ь ^ 22) -
^
^- Ax Ay
J
Pf
"
u yj
-Vyy-
0
U
21
V
4d 21
0
+
и ху
+
Ax &y 'X"
+ 0 ( Л 3) = 0,
4
.Y.
(11.78)
где X, Y — силы, приходящиеся на единицу объема, приложенные
соответственно вдоль осей x и у (объемные силы).
~>
Поясним процесс получения выражения (11.78). Вектор z =
~> —
^ *+
= [*ш]т присутствует в разложениях всех векторов ( z z 1^ - z 6)t
поэтому матричным множителем при нем стоит сумма матриц
465
оператора, изображенного на рис. 11.20, б. В разложениях при
~>
~> ~+ ^
zx = [u'xV'xY> присутствующих в векторах z8, zif z$, множитель mtfoc
Ах, а у векторов ze, z 5, z4— минус Дх, поэтому матричный мно­
житель у вектора zx — [uxv'xy — сумма матриц правого ряда минус
сумма матриц левого ряда оператора. Очевидно, что полученная
матрица будет нулевой.
~у
Для получения матричного множителя при Zy = [uyV y Y необхо­
димо из суммы матриц верхнего ряда оператора вычесть сумму
матриц нижнего ряда; эта матрица будет также нулевой. Для полу­
чения матричных множителей zxx = [uxxvxxy, z"yy — [u yyVyy]r необ­
ходимо соответственно сложить матрицы правого и левого рядов
—у
(множитель при zxx) и результат умножить на Ах2/2; верхнего и
нижнего рядов (множитель при z"yy) и умножить на A y 2/2 . Наконец,
для получения матричного множителя у вектора zxy = [uxyvxy]T
необходимо из крайних матриц восходящей диагонали вычесть
сумму крайних матриц нисходящей диагонали, далее результат
умножить на A x A y . Для прямоугольного элемента (табл. 11.6)
вычислим элементы матриц, входящих в выражение (11.78). После
сокращения на 4, будем иметь
^'Ц Л~Ь\±^гСц 4~ d jx -- 'G>
^22 H~ ^22 4“ ^22 ~Ь ^22 — ^1
hi
^22 ^ " ^ 22 ^
+
<ki =
2 (1-
J i 3) ^
E&
4 (1 + ^ )
I л
C il+ d li-
ft-i
А
U
o1 г--‘*
I л
’
^22+ ^22—
4( l + p i )
^
(ll.7 9 )
E&
o -i.
2 * (l-^ * )P ;
■8 (lт— ц)
0
Заменяя в выражениях (11.79) P на — • и подставляя ях в
(11.76), получим
Дх2
2“
E&
2
Ду д2и
( 1 —ц2) Дх Ш
Д* А~и
T 4.(1+ц) Ду dyi
Ai/ 2
E8
-Д л г &у , -Д у -Д , - i ^ p L x + 0<A-) - 0.
(11.80)
Умножая обе части равенства (1Ь80) на ( — ЁшИ&у ) и пРе*
небрегая 0 .(A3), получим
&>и
ш
l - f i дЧ
+
^
~
^
1+ц
+
^
cPv
1 -ц 2 у
п
— щ ^ + ~ т ~ л - ° -
m °п
( 11-81)
Уравнение (11.81) совпадает с уравнением (8.116). Аналогично мо­
жет быть получено и второе уравнение системы (8.116).
Таким образом, при стремлении размеров элементов к нулю
(Длг^-О, A ( /^ - 0 ) алгебраические уравнения МКЭ переходят в
дифференциальные уравнения теории упругости. Описанный под466
ход бииг предложен проф. Б. Я. Лащениковым для яодучения
дифференциальных уравнений дискретных сред, в данном парасрафе он иепользован для предельного перехода.
§ 11.5. ПОСТРОЕНИЕ МАТРИЦ ЖЕСТКОСТИ ДЛЯ РЕШЕНИЯ
ОБЪЕМНОВ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
При решении объемной задачи могут быть использованы элемен­
ты в виде пирамид, параллелепипедов и призм (рис. 1 1 .2 1 , а, б, в).
Рассмотрим элемент в виде пирамиды (рис. 11.21,a). В качестве
ч/
Рис. 11.21
степеней свободы примем перемещения угловых точек щ, V;, Wt
(i'= l, 2 , 3, 4). Зададимся полем перемещений
и= ai ■•- ал 4 - a З
у+ a 4 z;
v = a 5 + ая
х+ a,t/ + a,z;
\
w = a , + a lBx + апу+ a 12z
(11.82)
или в матричной форме
'u
V
~a± "
= L (x y z )
w
L (xyz) =
*^
= L {x yz) a;
(11.83)
0tl2_
*1
x
у г0 0
0
0
0
0
1
Lo о о о0
x
0
a = [a i a 2 . . .
0 0 0
у г0
0 0 1
0
0
у
\
а 12]т.
Аналогично плоской задаче, подставляя
координаты точек Д 2, 3, 4 , получим
—т
0
0
x
в выражение
—у
z-La,
(11.83)
(11.84)
где
?=Й ,
zl, zj, zI]T,z? = [M f, v,, аУ/];
467
L — числовая матрица, получаемая из матрицы L(xyz) последова­
тельной подстановкой координат точки 1 (первые три строки
матрицы L), точки 2 (вторые три строки матрицы L) и т. д.
^
Решая уравнение (11.84) относительно а, получим
a = L ^z.
(11.85)
Аналогично плоской задаче можно доказать, что матрица L явля­
ется неособенной. Подставляя (11.85) в выражение (11.83), получим
поле перемещений, записанное через перемещения угловых точек:
и
г (xyz) =
( 11.86)
V
,WJ
Далее, используя формулы Коши (8.103), по полю перемещений
построим поле деформаций (формулы Коши для объемной задачи
получаются аналогично плоской задаче при рассмотрении проек­
ций ребер на плоскостях Y O Z , Z O X в деформированном состоянии).
Эти уравнения можно записать механически, используя круговые
подстановки:
Л Л V.
v_y
и
ди
dx
dv
~
e=
v
е«
Уху
Ууг
LY **j
f y
dw
dz
dU_ I dv = B L - H .
ду + dx
dv
dw
+
dz
~ду
dw
dU :
+■
dz _
^dx
(11.87)
В— матрица, получаемая из матрицы L (xyz) путем дифферен­
цирования ее с использованием формул Коши.
Далее, по полю деформаций с использованием закона Гука
строится поле напряжений
o=*DBL-*z
468
(11.88)
Построим матрицу закона Гука. Закон Гука для объемного
напряженного состояния имеет вид
^ = г К — р т г Н ;
г у ^ - Е ^ у — № г — №хУ>
e* = j ( " * - ^ * - ^ y ) ;
1
1
Ууг
G Tyzf
(11.89)
Угх
Q ^zx'
Решая систему уравнений (11.89) относительноо*, ау1 стг, %ху1
xyzy Tzx и записывая результат в матричной форме, получим
(11.90)
cr= Z)e,
где
2 (1 — И)
1 — 2ц
2Ц
1— 2ц
D = G
2|*
1 — 2jx
0
0
о"
1— 2ц
2ц
1— 2ц
0
0
0
2Ц
1 — 2ц
2 ( l- ix )
1 — 2ц
0
0
0
2^
1 — 2ц
2 ( 1 — ц)
2^
1— 2ц
т
(11.91)
“о
0
0
0
G
0
0
0
1
0
0
0
0
0
0
1_
т
Далее, аналогично плоской задаче, запишем выражение для
потенциальной энергии через работу внутренних сил и перемеще­
ния угловых точек (см. рис. 1 1 .2 1 , а):
Л = 2 Г( £ ~ 1) Т J B * D B & v L ~ * z = zTrz.
(11.92)
V
Из выражения (11.92) имеем
r = ( L - y J ВЮВ dV L - 1,
(11.93)
где V — объем пирамиды.
В случае поля (11.93) матрица В не зависит от координат x,
у9 2 , поэтому формула (11.85) упрощается:
r - V ( L - ' y B W B L 1.
(11.94)
Построим матрицу реакций для элемента в виде параллелепи­
педа, изображенного на рис. 11.21, б. Поле перемещений запишем
сразу через перемещения угловых точек
—~> ~ I
*1
и
• .
= [^
V
-
w
~
Ni
N3
N4
N6
Ne
N,
N s]
*>
~+
Lz e_
, (11.95)
гдеГn ,
0
N ,=
0
01
rt; 0
L0
0
_*
,
n ,J
Гы.1
2; = U f
.
U .J
Аналогично плоской задаче для построения щ рассмотрим
функции
<Di(i)=i(i-^. Ф*Ф=4(1+1);
(11.96)
a>i(Q = T ( i - 9 .
4 (1+ 0- j
ф *(£)
Представим n t как произведения функций Ф
П
г= ф 1 (?) Фх (Л) Фх а),
П2 = Ф2 (S) Фх (Т]) Фх (0 ,
П3 = Фх (?)
«4
Ф 2
= Ф1 (?) Фх (П) Ф2 (С)
n, = Ф2 (!) Фг (n) Ф2 (Q
«5
(Л) Фх ( 0 ,
= Ф 1 (?) Ф 2 (Л) Ф 2 ( 0
Пн= Ф2 (E) Ф2 (Tj) Ф2 (£),
«7
*=*Ф 2 (?) Ф 2 (Л) Ф 1 (0 ,
*.
X
__
а/2
#
^ __
а
^
(11.97)
__
b/2
В соответствии с выражениями (11.97) функции пг для точек,
соответствующих прямоугольнику 1234, равны аналогичным функциямдля плоской задачи [см. (11.70)], умноженнымна Фх(£); соот­
ветственно для прямоугольника 5676 функции для плоской задачи
умножаются на Ф 2(£). Далее, аналогично предыдущему, по полю
перемещений (11.95) с использованием формул Коши (11.87) стро­
ится матрица В
8
= Bz,
(11.98)
И наконец, для построения матрицы реакций используется
формула
t
г= = ~
1 {
J j J B * D B dgdTid^.
-i -i -i
(11.99)
Построим матрицу реакций для элемента в виде прямой тре­
угольной призмы (рис. 11.21, e). Полеперемещений примемв виде
~~> ~“
2i
и
V = W i
_w _
Ns
N з
N 4
N 5 N s]
где
tit
Ni =
470
0
.0
0
0
пг 0 .
0
n,_
~*>
*i =
•>
~>
_^6 _
Ч
Vi •
_wt_
( 11. 100)
Для построения щ используем функции
где
< M C ) = 4 o - t ) , ^ > . ( 0 = 4 - 0 + S).
(11.101)
Функции п{ имеют вид
n, = щ (xy) Ф, (£),
пг= п2{ху)фх(1),
tt3 = rt3 (xy)Q>i(Q,
и4 = щ (xy) Ф2 (£); \
пъ= n 2 (xy) Ф2 (£); |
«в = «з (*У) Ф 2 ( □ . J
(11.102)
где rti(xy), n 2 (xy), п3 (ху)— функции единичных полей перемеще­
ний для плоской задачи [см. (11.56) — (11.58)].
Дифференцируя поля перемещений в соответствии с формулами
Коши (11.87), получим матрицу В. Окончательная матрица реак­
ций для прямой треугольной призмы будет
1
r =
1
5 \ B TD B d F d t = F J B ' D B d l ,
- 1
F
(11.103)
- I
где F — площадь треугольника, лежащего в плоскости X O Y
рис. 1 1 .2 1 ,e (заштрихован).
на
§ 11.6. СЛОЖНЫЕ ЭЛЕМЕНТЫ, ПОСТРОЕНИЕ МАТРИЦ ЖЕСТКОСТИ
ДЛЯ ЭЛЕМЕНТОВ С ИСКРИВЛЕННОЙ ГРАНИЦЕЙ
Выше были рассмотрены простейшие элементы для решения плоекой и объемной задач теории упругости. Элементы, у которыхполином, описывающий поле перемещений, содержит число коэффици­
ентов на единицу больше, чем размерность задачи, называются
симплекс-элементами. Треугольник, поле которого задается поли­
номом (см. § 11.3)
f=^+azX+ctsy,
(11.104)
является симплекс-элементом для решения плоской задачи (раз­
мерность задачи 2 , число коэффициентов полинома, аппроксими­
рующего поле перемещений, равно 3). Треугольная призма (см.
§11,5) также является примером симплекс-элемента
/ = c ^ + a 2* + a 3y+ ct 4Z
(11.105)
(размерность задачи 3, число коэффициентов полинома, аппрокси­
мирующего поле перемещений, равно 4).
Если число коэффициентов аппроксимирующего полинома пре­
вышает размерность задачи более чем на единицу, то элементы называкггся комплекс-элементами (сложными элементами). Напри­
мер, для треугольника в качестве точек, перемещения которых опре­
деляют степени свободы, помимо угловых точек можно принять и
точки, расположенные в середине сторон (рис. 11.22). В этом случае
в качестве полннома, аппроксимирующего поле перемещений,
471
используется полином с шестью коэффициентами
/ = « 1 + « 2х + азу+ а 4я2+ а 5ху+а 6*Л
( 1 1 . 106)
Элемент, изображенный на рис. 11.22, является комплекс-элемен­
том. Если стороны элемента параллельны координатным осям в слу­
чае плоской задачи или грани элемента параллельны координатным
осям в случае объемной задачи, то подобные элементы называются
мультиплекс-элементами. Число коэффициентов мультиплекс-элементов превышает размерность задачи более чем на единицу. При­
мером мультиплекс-элементов является прямоугольный элемент,
рассмотренный на рис. 11.19, а, и элемент в виде параллелепипеда
(см. рис. 1 1 .2 1 , б).
Рассмотрим элемент в виде произвольного четырехугольника
(рис. 11.23). Представим поле перемещений в виде
ai
а„
1
x
у xy
0
0
0
0
0
0
1
x
у xy
0
0
- L ( x , у) а.
]
(11.107)
Выразим коэффициенты полиномов через перемещения угловых
точек 1— 4 (рис. 11.23):
Xi
Vi
Xtfi
0
0
0
0
«1
»1
0
0
0
0
1
Xi
yi
Х 1У 1
<*2
«2
1
Уз
0
а а
0
0
1
0
0
*2 Уг
0
0
»*
*»
0
«3
1
Х3
Уз
х 3у 3
0
v3
0
0
0
0
1
“4
1
*»
У*
0
*4^4
0
0
1
- У 4_
472
I
1
V
_0
0
х2
0
а4
0
а5
х 3 Уз ХзУз
ав
0
а,
0
0
х4 У* *4^4_J- а в_
У2
Х 2У 2
0
(11.108)
или
•^*
^ 1
z = La,
(11.109)
^^
a = L * * z.
(11. 110)
откуда
Подставляя (11.110) в (11.107), получим
«^
[;]
= L(x, y ) L ~ lz.
(11.111)
По полю перемещений, используя формулы Коши, построим
поле деформаций
ди
дх
dv
e*
е«
_У
=
ду
ди . dv
_ d y ~*~ d x _
п
0
0
1
0
У
0
0
0
0
0
0
0
0
0
1 X
0
0
1
X
0
1
0
F-'z.
(11.112)
У
Далее построим поле напряжений
а—
(11.113)
у — De.
X
Записывая выражение для потенциальной энергии, получим
Я = 2 тб ( L ~ ly J B TD B dx dyL~^z = zTrz,
откуда
r=
6
(L -1)* J B rD B d x d y L ~ \
(11.114)
где
J ВтD B dx dу
X
"0
0
0
0
0
0
1
0
Sx
0
0
0
*—м- p
1-Ц с
2
«
0
0
5 ,
! — (* с
2
0
0
0
0
0
0
0
t- M ^ p
2
1— Ц с
2
V
0
vP
0
0
2
J [ 1—(i J
2
у
v Jx +
1— Ц с
^Sff ~ ~ 2 ~ ^
VS X
1+ Ц т
2
*v
1— w
x
0
0
0
»F
_LziL F
0
2
0
^ !/
l- H > с
2
^*
l +
M
^j
!—Ц с
2
V
^ s*
0
0
0
0
1 —Ц F
2
0
V -s ,
0
0
F
5,
0
!—Ц с
2
*
Sy
J , + ^ J *
0
2
*v
473
где F — площадь элемента; S x> S y — статические моменты относи­
тельно осей X и Y; J x, J y, J xy — осевые и центробежный моменты
«нерции элемента относительно осей X и Y.
Для подсчета геометрических характеристик разобьем четырех­
угольник на два треугольника и лроведем интегрирование по каж­
дому из них. При вычислении геометрических характеристик будем
использовать весовые коэффициенты, приведенные в табл. 13.27.
Для полинома второй степени они отличны от нуля только для
точек,.'Находящихся посрединесторонтреугольника (см. рис. 11.22),
и равны
F R
4! ’
8
F _ if .
l-2-3-4
Выпишем выражения для геометрических характеристик (начало
координат 0 помещено посредине стороны 2 , 3 ):
F = F i + F 2= ±
S =
1 Xi
1 *2
1 Х3
1 *2
1 *4
1 *3
У1
У2
+T
Уз
* F ± ^ 1-^ 2 [ y i ^ y * j | * p
У2
У4
Уз
^ #2+#4 | j/3 + j/4 j .
^ - T f < ( ( * T ^ ) ' + ( a j a ) * J + 4 - F , ( ( e + a ) 4 ( ^ ) ' J ;
т „
1 z? Гxi “Ь х%Ух ~Ь У% \ x\ 4- *3 У\ + Уз 1 |
2 J+
I 1* Jp IIХ
х22Ч
+
-Х
х4
4У
Уг
%~Т
~Г
~У
У\
\ , ,х
*3
3 ^+ х
х4
4УУз
з^4~У
“У41
4
~Г 3 2 L 2
2 +
2
2 J-
Ц* у - ~ 3 Р± [ ~ 2
2 ' 2
7
Аналогично вычисляются Sy и J y.
Можно построить усложненный элемент, например четырех­
угольный, ослабленный круговым отверстием (рис. 11.24), что
легко учитывается при подсчете гео­
метрических характеристик элемента.
Конечно, при этом не учитывается
концентрация напряжений, однакотакой элемент может быть с успехом ис­
пользован для оценки жесткостных
свойств сложных перфорированных
конструкций. Следует обратить вни­
мание на то, что описанный четырех­
угольный элемент является несовмест­
ным (перемещения вдоль кромок, не
параллельных координатным осям, ме­
няются по закону квадратной парабо­
лы), поэтомутфиведенные выше фор­
Рис. 11.24
мулы рекомендуется ^использовать
только для элементов, не очень отличающихся от прямоугольника.
Рассмотрим далее элемент в виде треугольника, изображенного
на рис. 11.25,a. Для построения полей перемещений используем
474
единичные поля, записанные через однородные координата* fcM.
§ 13.8).
Запишем выражения да я полей перемещений через перемещения
угловых точек
^U i
Г и 1 Гrii 0
n2 0
n3 0
n 4 0 пъ 0 п6 0
L v J:Lo rt\ 0 n 2 0 n 3 0 n4 0 пь 0 л6_
. (11.115)
u<
Функщш п{1 равные, единице в i- й точке, равны нулю, во всех
остальных точках. Построим функции п± и я4, изображенные на
$
3
Рйс. 11.25
рис^ 11.25,б\в (см. § 13.8):
tt1^= k1 ^Z/i
2 ^ ^i> Tt^-kJ*JL$*.
Коэффициенты kt и &4 найдем при условия,, что функции n* и пх
равны единице в точках 1 и 4:
k=
^ ( l - I ) . l ,
k, = 2,
Итак, окончательно
t%\ — 2 ( Ьг
l = ^ (
4 4
) ,
K=4L
1
jr- ] Lj, п4 — 4ЬгЕ2.
Испшшзуяформулы (13.113), запишем функции п± и п2 через
декартовы координаты:
til = 2£?— L i = 2 ^ - { A 1 + у23х +х 35у)г— ^р: ( A t + у23х+ х32у) =;.
^ 5 cj ( ^ i "i УщХ2 \"*32у2 i 2 A ^y2^.v ;- 2 / 1 iX-t-,y “;■2у23х32ху}
2p (^1 + У23*+*32^)>
fi 4 = 4L tL2 = ^ 1 ( 4 i + ^ 3 * + * 3 ^ ) (Л 2 + у 31х + Xi3«/) — J z (v4iA2 + Ati/3lx + A tx:l3y + A 2yi3x + y,^y31x? ■+■y 23x 13xy +
+ x 32A 2y + x 32y 31xy + x 32x isy 2)
475
или в матричной форме:
х [^ (т-> )
п4 =
[1
X
rti= = ti
#23 Ai
F
л: у x 2
рг(^ 1 ^ 1 зЧ “ ^32^2)
у X2 x y
I) 'f (
xy
уг
]x
At
1
2)
y*)^-A^.
y?2^23^3l
2
У23
2Fl
*32 1
2Я_|
#23*23
F2
~F2 (^1^3l 4 “ УгЗ^г)
y72^23^ls4^^32^3l)
^2.^32^13^j •
Функции п2, я 3 (единичные поля перемещений для точек 2 и 3)
могут быть получены путем круговой подстановки из функции пи
аналогично из функции щ получаются функции п5, п6. Собирая
множители при матрице-строке [1 x у x 2 xy у2], получим
^wj_p
0
xX
0
и xx 22
У
0
0
x yu
0
и2
0
0
0
0
1
x
у x
0
0
xy
y 2^
Nz,
(11.116)
где N — матрица, столбцами которой являются множители при
строке [ 1 x у x 2 x y у2].
Дальнейший алгоритм построения матрицы реакций аналогичен
приведенному в начале данного параграфа.
При построении поля перемещений для треугольного элемента
использован полный полином второй степени, поэтому построенный
треугольный элемент является совместным элементом (перемещения
вдоль сторон треугольника меняются по квадратной параболе, ко­
торая определяетсяединстi
венным образом по трем
точкам).
X
JL
Аналогично можно по­
ii
!L
строить целое семейство
А
хЗ
х2у
сложных треугольных эле*jL
il
xy3
ментовсдвумя, тремя и т. д.
tL
±
il
точками
на стороне. На
Xs
хч
у
7£
7j_
xy*
£_
рис. 11.26 приведены сте­
x*y
xy5
*y
хУ
/
w
il
пенные полиномы, которые
изображены в виде пирами­
Рис. 11.26
ды. В самой верхней клет­
ке указан полином нулевой
степени ( 1 ), в двух верхних слоях полный полином первой степени
(1, x , у ), в трех верхних слоях полный полином второй степени
(1 , x , у , x 2, xy> у 2) и т. д. Треугольник, изображенный на рис. 11.25, а,
имеет шесть точек и ему соответствует полный полином второй сте­
пени (три верхних слоя треугольника, изображенного на рис. 11.26);
аналогично треугольнику с двумя промежуточными точками соот­
ветствует полный полином третьей степени (сравни рис. 11.27, а и
11.26), с тремя промежуточными точками — полный полином чет­
вертой степени (сравни рис. 11.27, би 11.26) и т. д.
Таким образом, для каждого из треугольников с последователь­
но увеличивающимся числом точек на стороне будет соответство—
476
вать полный полином. За счет этого все семейство треугольных эле­
ментов является совместным, а при последовательном увеличении
точек последовательность полиномов будет полной.
В элементах, изображенных на рис. 11.27, кроме контурных
точек использованы и внутренние точки. Таким образом, при ис­
пользовании треугольных элементов число степеней свободы оста­
ется тем же, что и при использовании простейших треугольников
Рис. 11.27
(симплекс-элементов). Но внутренние точки порождают локальные
степени свободы, т. e. внутренние точки являются изолированными
точками, и в уравнения равновесия, относящиеся к этим точкам,
входят неизвестные, принадлежащие только данному элементу.
Поэтому перемещения внутренних точек можно выразить через
перемещения контурных, и в общую систему уравнений для ан­
самбля элементов будут входить только те неизвестные, которые
относятся к контурным точкам, причем исключение перемещений
внутренних точек можно проводить на уровне элемента. Этот под­
ход позволяет сокращать порядок общей системы при использова­
нии сложных элементов.
Поясним подробнее процесс исключения локальных степеней
свободы. Перенумеруем перемещения таким образом, чтобы в век­
торе перемещений для одного элемента сначала стояли перемещения,
относящиеся к внутренним точкам, и далее — к контурным:
^
2=
r+
[Zl
^
Z
(11.117)
где z0— вектор перемещений внутренних точек; zx— вектор пере­
мещений контурных точек.
В соответствии с разбивкой вектора z матрица реакций может
быть представлена в виде
г —
(11.118)
Г io
*ii.l
Запишем равенство
(11.119)
477
Произведем исключение по Гауссу вектора
уравнения (11.119) {см. § 13.4)
Г '»
' « _____1 Ы
1
L^io^oo*J^il
= Г
r ibr obr b i j L z i \
'•
z0 матричного
j .
(1 1 . 1 2 0 )
Lr i — r Ur w r Qj
Рассмотрим второе матричное уравнение
*^ ^
^
(Гц— r 10 rooV01) гх= гг— r i 0 roi)1 r0.
(1 1 . 1 2 1 )
В уравнение (11.121) не входят перемещения z0> т. e. вектором
обобщенных перемещений является вектор перемещений только
контурных точек. Исключение внутренних точек несколько ослож­
няет алгоритм построения матрицы реакций, но сокращает общее
число степеней свободы.
vY
a)
*)
№
| ' ■'■■' tj
№
L >
'—<
?f
kY
fs
1%
f3 " № „
, U l f , L b vU L* p
ft
&
гt '^>"'1,1
_(.h_^
*«
.U *
_
ь
O'
_
k^
L* ^ Ь
U i*fe Л I» f r J t
- л1
*ф
&
k
kf*
L J Г«- j >iJL*
Y .E T
J s-^A
j t 3 ^T•
Л—£
^-rr:—^ ►
JIt
k"i
U f
4^
L£
r f
f"2
L*£ Lji
Э
Рис. 11.28
Остановимся далее на сложных прямоугольных элементах. На
рис. 11.28, а изображен прямоугольный элемент с одной промежу­
точной точкой на стороне, а на рис. 11.28, б— с двумя точками.
Для построения полей перемещений таких элементов используем
интерполяцию по Лагранжу. Задачей интерполяции является на­
хождение такой функции, которая в ряде фиксированных точек (уз­
лах интерполяции) принимает заданные значения. При интерполя­
ции по Лагранжу имеем
y=y<f$>o(x) + у (Ф ,(х)+ . . .+у п
Фп(х),
(11.122)
где y t— значения функции в узлах интерполяции (i меняется от
0 до n);
ф
(Х— Хр) C * -* l) ■• ■ (*—*,• —l) ( x - x j +i) . • • (ж— х„)
1
(xi
Д'о)
( X i - X i ) . . . ( * ; - * , ' _ l ) ( X i - X i + i) . . . ( * , — * „ )
, , , 19ov
'
•
'
В числителе формулы (11.123) стоит произведение разниц между
текущей координатой x и всеми координатами точек интерполя­
ции, кроме точки х{. В результате функция Ф{ принимает нуле478
вое значение во всех точках, кроме х£. В знаменателе формулы
(11.123) вместо текущей координаты x стоит фиксированная коор­
дината лг/, в результате при подстановке x = x t функция Ф/= = 1 .
На рис. 11.29 показана функция Ф/, которая называется
единичной функцией Лагранжа. Умножая единичные функции
Лагранжа на заданные координаты y h в точках интерполяции
получим функцию, которая в точках интерполяции будет прини­
мать заданные значения ( 1 1 . 1 2 2 ).
**n
Рис. 11.29
Рассмотрим элемент, изображенный на рис. 11.28,a. При пост­
роении полей перемещений используем относительные координаты
x
а/2
2x
у
а ’
■
__ 2y в
Ы2
ь ’
0 tti 0 « а 0 п3 0 n 4 0 ns 0 rt, 0 и, 0 rt, 0 1
n, 0 «1 0 «2 0 «з 0 rti 0 пь 0 n e 0 п 7 0 пяJ X
ыа п
Vа
X
«1
Vi
(11.124)
«8
L ^s_
Построим единичные полиномы Лагранжа третьей степени
ф (%)- ( i - Q ) ( S - 1)___ 1 f g . - g y
w i(S ) — ( _ l _ ^ ( _ l _ n1)
2 lS
Sb
ф (?) _ « + » ) t t - Q - i _ t . .
^ (s ;-(o + i)(o -i)
5 *
Ф / t \ _( S + i) (1—0 ) __ _L /?24 -£ )
3 '* )
(l 4-1) (1 —0)
2 '
^‘
(11.125)
Заменяя координату £ на т], получим аналогичные полиномы
ф . (rj) ( r = 1, . . . , 3). На рис. 1 1 .3 0 ,a ,6 ,e соответственно изобра­
жены три характерные функции n a, n,_ и пъ (остальные функции
будут аналогичными)
Пв = Ф2 (|)Ф 2 (т1); \
^ = Ф ^ (I) <$iCn); [
(11.126)
л . = ф » ( 6 ) ф 1(л)- ,
На рис. 11.31, а, бпоказаны части пирамиды полиномов, исполь­
зуемые при построении элемента в виде прямоугольника без про479
Рис. 11.30
межуточной точки (см. рис. 11.19) и с одной промежуточной точкой
(см. рис. 11.30). Дальнейший ход построения матрицы реакций ана­
логичен приведенному в началепараграфа. Как и в треугольном эле­
менте (см. рис. 11.27, а), внут­
0)
tf
1
ренняя точка исключается по
Гауссу на уровне элемента
1
_4_
t
[см. ( 1 1 . 1 2 1 )].
Для
сгущения прямо­
t
~£_
44_
k
угольной сетки необходимо
i l
иметь прямоугольные элемен­
7 г_
~кгг
iL
ты с разным количеством то­
чек (рис. 11.32, a). Ha рис.
ш .
11.32, б показан элемент с
Рис. 11.31
двумя промежуточными точ­
ками по одной из сторон и
без промежуточных точек по остальным сторонам, а на рис. 1 1 . 3 3 —
два характерных единичных поля для этого элемента.
e)________________
в)
У
^ 5
iь
__
tt>)
1Г
.x.
е/6 afT
В
1
X
_ r *1
*^^*^^*
z “д ♦
1
г
----- >
«=----- ‘
Рис. 11.32
Рассмотрим далее произвольные элементы как с прямолинейны­
ми, так и с искривленными кромками. Для получения полей пере­
мещений для этих элементов необходимо построить функции, ото­
бражающие квадрат на четырехугольник. Рассмотрены два вида че­
тырехугольников: с прямолинейными кромками (рис. 1.34, а) и
с кромками, описанными по закону квадратной параболы
(рис. 11.34,e). Функции, отображающие квадрат (рис. 11.34, б) на
480
четырехугольник с прямолинейными кромками, имеют вид
х= [щ
n2
n3
n t]x, y = [nt
n2
n3
x = [x t
Х2
Х3
лг4]т, У= [У\
уг У
з г/4]т;
Пг = ф х ( ! ) Ф х (л)»
п 3 = Ф х ( ! ) Ф а (Т]);
«2 = ф 2 (?) ф 1 (л).
«4
tiify;
= ф 2 (?) ф 2 (л).
(11.127)
)
где
ф1 © = ^ ( 1 -? ) .
ф х(л) =
ф а (?) = т ( 1 + ? ) .
ф 2 ( л ) = ^ ( 1 + л).
4
-( 1 - л ) ;
Формулы (11.127) ставят в соответствие каждой точке k (cri), рас­
положенной внутри квадрата (рис. 11.34, б), точку kt(x, у), распо­
ложенную внутри четырехугольника (рис. 11.34, а). При этом угло­
вые точки квадрата (рис. 11.34, б) переходят в угловые точки че­
тырехугольника (см. рис. 11.34, а). Например, подставляя в уравo)
kY
9
i(*t,9*)
%
зШ
m
и
о
*H-t)
2(h-t)
}
*)
%
3 ________ 7______ ' Ч
*. .
* tЧr'
_____ 0_
^
i
16 № 24(8
1
4
3 _
^
>н
2
481
нения (11.127) координаты точки 1 (— 1, — 1), получим щ =\, п2= 0,
п3— 0 , п4 = 0 и, следовательно, x = x ly а у=уг
.
Рассмотрим четырехугольник, изображенный на рис. 11.34,e.
Функции, отображающие квадрат, изображенный на рис. 11.34, г,
на четырехугольник с искривленными кромками, изображенный на
рис. 11.34,e, имеют вид
х= [па пг...п 8\х,у = [па n i . . . n 8 ]y;
х= [ха ^ . . . Х 8]т,
y=[ya
(11.128)
y i . . . y 8]T. J
Функции rtay n ly . . . , п8 строятся по формулам (11.126). На
рис. 11.35, а показан элемент с искривленными кромками, описан­
ными по закону кубической параболы. Отображающие функции
могут быть построены аналогично с использованием кубических
полиномов Лагранжа.
*)
fj
j
_________
11
//
1?<
iL
________
/
0
Ч
9
t
А
1
г__
а
1
i
5Л
i5
0о
1n
(
27
Рис. 11.35
Рассмотрим процесс построения матрицы реакций на примере
четырехугольника, изображенного на рис. 11.34,e; для остальных
случаев построения аналогичны. Поля перемещений выразим через
те же функции па> п±у. . . , п8, что и функции, связывающие коор­
динаты (11.128).
Поле перемещений примем в виде (11.124). По полю перемещений
построим поле деформаций
ди
дх
dv_
ду
да , dv
~ + a 7
482
иа
Va
их
Vi
( 11. 129)
где
drti
~ШГ
В — \B a
drti
^У
дп/
дх
B i • • • B ^ \, B (
дп{
_ ду
(i = a , 1, • • •»
8 ).
(11.130)
Так как п( определяются через |т], необходимо выразить произ*
водные по x и у через производные по E и г]:
д п {_ дп/ дх
дщ ду t д щ _ дп ,- дх , d n j ду
д£
дх д% ~^ ~ду ^f* ’ dr;
дх дг] ~^~ ду ch]
или в матричной форме
~ дщ ~
Ж
дп(
L .^ f j
" дх
д1
дх
-* f
ду_~
д1
dy_
дг\ -
drt; ~
~дГ
=~—чJМ
~
(11.131)
•
*
дп;
L ду _
дПа
д1
дпа
_ дг\
дщ
~W
дщ
dr)
^ ^a
дп8 ~ *i
’; • • ag
дщ
* ' • дц .J
Уа
Ух
L*e
У*~
Из выражения (11.131) имеем:
дщ
= [1
дх
dni
Г-1 ~ зг
дп;
*. дг| -
дп{
дх
дщ
^~Вудп;
0] У- 1 ~Щ
дп,~дn
(11.132)
дп{
~Щ
\ ] J - 1 дп[
дц
**
дщ
L = [0
~У
-
(11.133)
_4
Подставляя (11.133) в (11.130), получим
г дп(
[1
0 jy -1
дЪ
дщ
*1
Г dni
_
Bt
[0
дп; ~щ
1] J ~ 1 дп;
дг\
[1
~м
dni
_~дц _J
- dnt '
Ж
0 ]У “ * дп;
L^T- j
(11.134)
Таким образом, матрицы В,■ выражены через производные п{
16*
483
по 1 и т|. Для получения матрицы реакций используем формулу
1 1
r=
$$tf'Z>B d*cty =
6
^$
8
^ B r D B det J d i dr].
(11.135)
- 1 -1
Для вычисления интеграла необходимо воспользоваться численным
интегрированием. Для интегрирования по прямоугольнику перво­
начально рассмотрим одномерный случай. Для вычисления интег­
ралов в этом случае можно воспользоваться интерполяционным
полиномом Лагранжа и получить формулы интегрирования Котеса.
При использовании полиномов Лагранжа узлы назначаются априо­
ри, при этом, как правило, используются равностоящие узлы. При
n узлах численное интегрирование по Лагранжу дает точное зна­
чение интеграла вплоть до полинома (n— 1 )-й степени.
Гауссом была предложена другая формула интегрирования, при
которой производится Еарьирование положением узлов таким обра­
зом, чтобы при n узлах получалось точное значение для полинома
степени 2 (n — 1), т. e. численное интегрирование по Гауссутребует
в 2 раза меньшего числа узлов. Наиболее трудоемкой операцией при
численном интегрировании является процесс вычисления подын­
тегрального выражения, и число этих выражений по Гауссу в 2 раза
меньше, чем по Котесу, поэтому при построении матриц реакций для
прямоугольных элементов рационально использовать формулу
Гаусса. Формула Гаусса для вычисления интеграла имеет вид
о
J
_J1
п
f ( l ) A l =
2
i= 1
C:fa<)-
При ti — 2
при n = 3
_ |j = | s = 0,77459667,
| 2=
0;
_5
_L
г (2>_J-О г(3)__—
J-О г(3)__—
•
о °1
3
1о >
и2
Q >
18
при n = 4
—
Ei = E4 = 0,8611363, ■— ? 2 = Е3 = 0,33998104;
i . с«> = ± с?' = 0 ,17392742,
\ c f = i c f = 0,32607258.
Рассмотрим прямоугольный элемент, примем п = 3(рис. 11.36):
1
J =
1
j J/(i,
-1 -1
1
1
T ])d E d r]= ^ d r ] j / ( E , r i)d i-1
-1
Применим формулу Гаусса для вычисления внешнего интеграла
1
/ = 4
p (5 -4 i)d l +
-i
484
1
4
J /( S ,
-i
1
0 )dE
+ l
j / ( i , n 0 dE.
-г
Применим формулу Гаусса для вычисления внутренних интег­
ралов
' у= т [ 1 ^ - ^
- % ) + f / ( ° ’ - % ) + |/U i,~ % ) ] +
+ 4 f 4 / ( - i x . P ) + 4 /(o , o ) + ^ f i i t , о ) ] +
+ 4 ( 4 ^ -
^ 1' ' * l l ) + 4 ^ 0, 4 l ) + j f ( l l ,
%)]•
Аналогично прямоугольному могут быть построены треугольные
элементы с искривленными кромками. Используя описанный под­
ход, можно построить сложные объем­
ные элементы с искривленными гранями.
В заключение приведем классифика­
цию сложных элементов. При описании
•----•
геометрии и полей перемещений можно
использовать полиномы, степень кото- —
^
рых зависит от числа узлов. Имеются
f *
следующие три варианта:
1) число узлов, определяющих гео­
метрию элемента, меньше, чем число
^~£г
—^- 4,
определяющих поля,— субпараметрическиеэлементы;
2 ) число узлов, определяющих гео­
метрию элемента, равно числу узлов,
определяющих поля,— изопараметрическиеэлементы,
3 ) число узлов, определяющих геометрию элемента, больше
числа узлов, определяющих поля,— суперпараметрические эле­
менты.
В соответствии с этой классификацией и с классификацией,
приведенной в начале параграфа, элементы, изображенные на
рис. 11.27, являются субпараметрическими комплекс-элементами,
а элементы, изображенные на рис. 11.28,— субпараметрическими
мультиплекс-элементами. Наконец, элементы, изображенные на
рис. 11.34 и 11.35, являются изопараметрическими комплекс-эле­
ментами.
§ 11.7. ПОСТРОЕНИЕ МАТРИЦ РЕАКЦИЙ
ДЛЯ РАСЧЕТА ПЛАСТИНОК И ОБОЛОЧЕК
Рассмотрим прямоугольный элемент, изображенный на рис.
11.37. Вектор перемещений, принятых в качестве степеней сво­
боды, имеет вид
~~ ^ ~“
Zi
Wi - w {H
>dw j
^
^2
Ф
?
==
, где zt =
2=
д
у ( / = 1 - 4 ) . (11.136)
^
dw(
Z
rrM
—
>3
_Ф
I
д
х_ Z4 J
485
Зададим поле перемещений в виде полинома
(11.137)
w = F(xy) а,
где w — прогиб элемента в точке с координатами x, у\
F(xy) = [1
a= K
x
у
x 2 xy
у 2 x 3 x 2y
а2 а3 а4 а5
а,
x y 2 у 3 х 3у
а 7 а 8 а9
a io
a lt
хуъ\,
а 12]т.
Полином содержит 1 2 коэффициентов. Дифференциальное уравне­
ние пластинки, работающей на изгиб, при загружении ее наY
Рис. 11.37
грузкой, распределенной по контуру, имеет вид
дЧй) . d^j)
— + 2
= 0.
дх* ~
dx-*jy2
(11.138)
Подставим выражение (11.137) в дифференциальное уравнение
(11.138):
d*w
дх*
dAw
ду*
d*w
-0 .
дх2 ду2
Таким образом, полином(11.137)удовлетворяетбигармоническому
уравнению равновесия внутри элемента. Рассматривая поле пе­
ремещений между элементами, можно показать его непрерывность
по перемещениям и разрывность в производной по нормали
к контуру.
Запишем поля перемещений и углов поворота в матричной
форме
-W (xy)
2 (X y ) -=
Ф* ( x y )
Фу (xy)
' w (xy)
-
" Р(ХУ) '
dw (xy)
-
ду
dw(xy)
дх _
_
Fy(xy)
ос=
L
(xy) а ,
_ - F ' x (xy)_
(11.139)
486
где
1
L {xy) == 0
xy у 3
л
:3
x-y xy2 г/3
x 3y xy3
0 1
0
л
: 2у
0
.v2
2xy 3 у 2 x 3 Зху2
0 — 1 0 — 2х — у 0 — Зх2 —2xy — у 2 0 —Зх2г/ —у»
x у
x3
Подставляя в (11.139) координаты точки 1, получим
z1 = L 1а,
(11.140)
где
Zi = [® 1Ф Ж ]Т-
Аналогично, подставляя координаты остальных точек, получим
матрицу L порядка 12x12. Итак,
^
^
(11.141)
z = La.
Умножая обе части равенства (11.141) на L х, получим
a = L - i г.
(11.142)
Подставляя (11.142) в (11.137),
получим
w = F (xy) Ь ~г
г. (11. 143)
На рис. 11.38 показана часть
срединной поверхности элемента
(около точки 1) после деформа­
ции. Рассмотрим перемещения в
плоскости, отстоящей от средин,—
У
ной на расстоянии z. В соответст­
вии с рис. 11.38 перемещения в
плоскости, отстоящей на расстоя­
нии z от срединной, будут
dw
/л * л л .,
dw
и== - г ш >
V = ~ Z W ’ (11Л 44)
где z — расстояние от нейтрального волокнадо рассматриваемого.
По полю перемещений (11.143), используя формулы Коши и
соотношения (11.144), построим поле деформаций
~ди
дх
8—
д2ш
дх2
-~>
дЪ
— — zBL' ~г
=— z ду2
г,
„ d2w
_ дх' d y _
dv
ду
ди . dv
J y + fa_
(11.145)
где
В
о
о
0
0
2
0
0
()A'
0
0
0
0
2
0
0
0
0
0
2
I0
0
2у 0
0
2x
4x 4 У
0
6у
0
6 xy
0
0
6 xy
6x2
6 у2
(11.146)
487
Составляя выражение для потенциальной энергии, получим
П =: 4" ССf стте dx dуdz =
а/2
Ы2
J B ID B d x d y L ~ 1z —
= Y J zadzzT(L_1)T J
-6/2
-а/2 -Ь/2
а/2 Ы2
j
J B'DBdxdyL-'l
- а /2 - 6/2
= l^ g (L - T
(11.147)
С другой стороны,
7 7 = y ? Trz.
(11.148)
Сравнивая выражения (11.147) и (11.148), получим формулу для
матрицы реакций
а/2 Ь/2
r = ^ ( L " 1)* J j B * D B d x d y L - K
(11.149)
-а/2 -6/2
Используя относительные координаты
2x
aj2 а ’
ё
_ У _%У
b/ 2
^
b*
формулу (11.149) можно переписать в виде
1 1
r = ^ ( L - * ) T J ^ B * D B d | d^L-1.
(11.150)
-1 -1
Как и в плоской задаче (см. § 11.2), матрица реакций может
быть представлена в виде
r =
Ai i
^12
Cl3 Du
^21
^22
^23
^24
^31
^32
^3 3
^3 4
jO * i
^42
^4 3
^44
(11.151)
Одинаковыми буквами обозначены блоки матрицы реакций, эле­
менты которых одинаковы по модулю. Разделим перемещения на
две группы:
1 -я
группа
Ф^
488
2
-я группа
wy*
1 -я
группа
Ф*
2
-я группа
wyy
Аналогично плоской задаче (см. § 1 1 . 2 ), составим операторы
знаков:
Оператор 1
Оператор 2
Оператор 3
w
ф* Фу
w
ф*
фу
W
ф* фу
w
ф*
ф^
+
+
-
+
+
-
—
w
+
ф*
+
—
ф^
+
w
-
+
Ч~
--
Ф*
+
—
+
ф^
-
-
4+
_
+
+
В табл. 11.7 приведены исходные элементы первого блочного
столбца, модули остальных столбцов соответствуют выражению
(11.151), а знаки устанавливаются с использованием приведенных
операторов знаков.
На рис. 11.39 изображен треугольный элемент, расположенный
в горизонтальной плоскости X O Y . Начало координат принято
в центре тяжести треугольника.
В качестве полинома, аппрокси­
мирующего функцию прогиба, при­
мем
w = а г + а 2х + «з у + a^x2+
+ а ъху + а ,у 2+ а 7х 3 +
+ а 8х 2у + a ,x y 2+ a 1Qy \ ( 1 1 . 152)
По условию симметрии полином
(11.152) имеет 10 коэффициен­
тов. Треугольник имеет три уг­
ловых точки. Если в каждой точке
Рис. 11.39
принять по три неизвестных ( w h
Ф?» Ф?). TO полное число степе­
ней свободы равно девяти, что на единицу меньше количества
коэффициентов полинома (11.152). Поэтому необходимо ввести
еще одну дополнительную степень свободы, в качестве которой
можно принять перемещение центра тяжести w .
Запишем выражение (11.152) в матричной форме
W —[ 1
X
х?
у
у2
xy
x3
x 2y
xy2
у 3] а ,
(11.153)
где
—т
а = [сс±
сс2 . . .
Дифференцируя (11.153) по
полей углов поворота
и
у,
получим выражения для
w ~
dw
' w'
ф*
= .-
_ Ф 'У -
x
а 9]т.
д
у —L ( x y ) ос,
(11.154)
dw
dx -
485
T а б л и ц а 11.7
Яп = 4(Р2+ р - 2) + |( 1 4 - 4 ц )
- 2 р - 2- |( 1 + 4 ц ) ] б
22
-[
7 f - +
+ > “ 4
а31— 2 p 2 + l( l+ 4 ^ ) J a
i2
«32= —ЦО*
^33
4
'33
4
£33
4
^P*+
Ьц = — 2 ( 2 p 3 - p - 2 ) _
1
^21— - P * + 6 " 0 + ^ ) b
'2 2
4 f > - -B (> -f)l
62
^31=
<*i = 2(&8- 2 B - a)“
С21=
l P 2-
(14—4(i)
— 2fS- 2 — g. (1 — p,) J b
C22
4 4 p" - r e < '- ') J
^31=
2
Р 2 _ ^ ( , +4(1) ] Й
c32
—
i2
0
dii = - 2 (Р>2+ £ - 2) +
1
+ - (1 4 - 4 ^ )
С?21=
_P* + l ( l - ^ ) ] f t
d 2 2 = [ ^ P - 2+
+ i< '- r t J
£?Я1=
Pa—^ ( l ~ H ) j
a
b2
4
^33= ~o P2+
+ Д ( » - ю ]« 5
' М нож итель к таблице D ja b , D = £ 6 3/ [ 1 2 ( I — pt2) ] , P = 6/a.
49a
ч
где
'1
L(xy) = 0
0
у
X2
0 1
0
— 1 0 —2x
X
xy
x
—у
у2
2у
0
*4
x-y
0
xy2
x2
—Зх2
—2 x y
У3
2 x y 3у *
—у 2 0
Подставляя в (11.154) координаты точек 0, /, 2, 3, получим
г = La,
(11.155)
где
г = [ш0 Wi cpf
Ф?
w2 q£
cpf
w3 ф?
Ф ^]т
Умножая обе части равенства на L -1, будем иметь
^
-*■
a = L ~ 1z.
(11.156)
Подставляя (11.156) в (11.153), получим
w = [1 x
у
По полю перемещений
0 0
0 0
e=
0 0
x2 xy
у2 x 3 x 2y
построим поле
0 2 0 0 блг
0 0 0 2 0
0 0 2 0 0
xy2 y 3]L~ lz. (11.157)
деформаций [см. (11.145)]
2у 0 0
~+
0
2x 6у L - ' z =
4x 4у 0
= — zBL ~lz.
(11.158)
Матрица реакций для треугольного элемента строится rro фор­
муле
r = ^ ( L - ' y ^ B r D B d x d y L - 1.
Д
(11.159)
Д ля вычисления интеграла применяется численное интегриро­
вание с использованием весовых коэффициентов, приведенных
в табл. 13.27. Полученная матрица будет иметь порядок 10x10,
причем первая степень свободы будет локальной. Эту степень мож­
но исключить по Гауссу (см. § 11.6), после чего получим оконча­
тельную матрицу реакций для треугольника порядка 9 x 9 .
Треугольными элементами можно покрыть оболочку достаточно
произвольной формы (рис. 11.40), поэтому треугольные элементы
могут быть широко использованы для расчета оболочек. При этом
необходимо учитывать работу элемента как из своей плоскости
(изгиб), так и в своей плоскости (мембранное напряженное состоя­
н и е— плоская задача). Построение матрицы жесткости при учете
работы его на изгиб рассмотрено выше, а в своей плоскости — в
§11.3.
Треугольный элемент для расчета оболочки изображен на рис.
11.41, Вектор обобщенных перемещений для этого элемента имеет
ВИА
z = [z\ z\ 4 ] s
(11.160)
4951
где
Zj=[U;
Vt
ф?
W,
ф?]1'=1, . . . , 3.
(11.161)
Матрица жесткости для такого элемента будет иметь порядок
15x15; при этом работа элемента в плоскости не будет влиять
Рис. 11.41
Рис. 11.40
на работу элемента из плоскости и матрица жесткости будет
иметь вид
r =
^ 11
^ 12
^ 13
Гп
r 23
r 23
г 31
Г 32
Г 33
(11.162)
где
Ui
^L щ
<P*
(11.163)
Блоки матрицы Гц (11.163) строятся из блоков матрицы реакций
плоской задачи (верхний заштрихованный блок) и блоков матрицы
реакций задачи изгиба (нижний заштрихованный блок); незаштрихованные части блока ri}- соответствуют нулевым элементам. Матри­
ца (11.163) является матрицей реакций в местной системе коорди­
нат. Треугольники, на которые разбита оболочка, могут иметь про­
извольную ориентацию (см. рис. 11.40). Поэтому для составления
матрицы реакции оболочки необходимо перевести матрицу реакций
из местной системы в общую. Вектор обобщенных перемещений
в глобальной системе координат имеет вид
z =
[z\
Zi
(11.164)
z i ] T9
где
ZJ =
•492
[U t
v,
W t
Ф ?
фУ]
(i=
l,...,3 ) .
(11.165)
Связь между координатами векторов (11.161) и(11.157)имеетвид
ui = l1Ui + m1Vi + n1W i\
V{ = lJJ( + т^/ i ^- n^Wi*,
щ = W i + ШзУ; + n ,^ ,;
( 11. 166)
Ф? = 1±®? + т № \
qpf = /2Ф^ + т 2ФГ,
j
где tly /2, /3— косинусы углов между осью X и соответственно
осями x, у , z; ти т2, m3— аналогично между осью Y и осями
X, у, z и т. д.
Зависимости (11.166) в матричной форме имеют вид
z, = CZ;.
Для всех
имеет вид
обобщенных
перемещений
(11.167)
зависимость
z^CZ,
(11.167)
(11.168)
где
C=
Г^
с
с
Запишем выражение для потенциальной энергии через вектор
обобщенных перемещений в местной системе координат
tf==(z)Vz.
(11.169)
Подставляя (11.168) в (11.169), получим
I l ^ Z TCTrCZ.
(11.170)
R = CrC,
(11.171)
Отсюда
где r —матрица реакций в глобальной системе координат.
§ 11.8. ОСОБЕННОСТИ КОМПЛЕКСОВ ДЛЯ РАСЧЕТА
КОНСТРУКЦИЙ ПО МКЭ. СУПЕРЭЛЕМЕНТНЫЙ ПОДХОД
В § 9.5 описан комплекс по расчету стержневых систем. В по­
добных комплексах обычно используется матрица жесткости для
плоского стержня и матрица жесткости пространственного стержня
при жестком и шарнирном закреплении концов стержня. Програм­
мы построения матриц жесткости стержня составляют «библиотеку»
элементов комплекса. Библиотека элементов комплексов по рас­
чету конструкций с использованием МКЭ содержит значительно
большее количество элементов (стержневые, пластинчатые, оболочечные, объемные и т. д.). Элементы по своей конфигурации могут
быть прямоугольными, треугольными с искривленными кромками.
493
В качестве степеней свободы могут быть приняты перемещения
угловых точек или угловых и промежуточных.
Библиотека элементов комплексов по расчету конструкций
с использованием МКЭ может быть построена по моно- и полиэлементному принципу. Например, можно построить единый объемный
конечный элемент в криволинейной системе координат, из которого
как частмый случай получаются элементы для расчета оболочек,
пластинок, работающих на изгиб, пластинок, находящихся в усло­
виях плоской задачи — моноэлементный подход. Можно для расчета
оболочек, пластинок, решения объемной задачи строить самостоя­
тельные матрицы жесткости — полиэлементный подход. Каждый из
подходов имеет достоинства и недостатки. Так, достоинством пер­
вого подхода является то, что библиотека элементов получается
меньше, однако время построения матрицы жесткости для одного
элемента получается большим по сравнению со вторым подходом.
Библиотека элементов должна быть открытой и достаточно просто
пополняемой. По мере использования комплекса появляются все
новые и новые элементы и библиотека элементов расширяется.
В настоящее время создано большое количество универсальных
комплексов по расчету стержневых и континуальных систем по
МКЭ. Входные данные таких комплексов сложные, причем в каждом
комплексе эти входные данные свои. Изучение входных данных
в каждый комплекс требует достаточно больших затрат сил и энер­
гии пользователей. В вычислительных центрах проектных'институтов обычно используется несколько комплексов и изучение входных
данных по каждому комплексу вызывает серьезные затруднения.
Поэтому делается попытка создания единого входного языка. При­
мером такого языка является язык «Вход», разработанный под ру­
ководством Р. А. Резникова.
Универсальные комплексы являются комплексами со сложными
исходными данными. В настоящее время создаются комплексы по
расчету конкретных
конструкций — объектно-ориентированные
комплексы, эти комплексы более удобны в эксплуатации. Объектно­
ориентированные комплексы по прочностному расчету конструкций
содержат одни и те же блоки (например, блок решения системы
линейных уравнений). Эти комплексы можно строить по модульному
принципу. Все модули делятся на проблемно-ориентированные
(используемые в различных комплексах) и объектно-ориентирован­
ные (используемые в данном комплексе). Например, к проблемноориентированным модулям относятся — модуль формирования, мо­
дуль решения системы линейных уравнений, модуль вычисления
усилий и др. Сервисные программы относятся к объектно-ориентиро­
ванным модулям. Программист с использованием специальных
средств организует входные и выходные данные объектно-ориенти­
рованного комплекса так, что эти данные задаются в наиболее при­
вычной для инженера форме. Далее производится сборка комплекса
из проблемно-ориентированных и объектно-ориентированных моду­
лей, из библиотеки элементов выбираются элементы, необходимые
для расчета данной конкретной конструкции и получается объектно494
ориентированный комплекс. Таким образом, при таком подходе
система адаптируется к проектировщику и проектировщик имеет
входные и выходные данные в привычной для него форме. Организация входных и выходных данных является одним из центральных
вопросов для пользователя, и жизненность комплекса в значитель­
ной степени определяется этой организацией.
Существенным отличием комплексов по расчету с использованием МКЭ от комплексов по расчету стержневых систем является
то, что при расчете стержневых систем количество неизвестных фик- сировано и определяется количеством узлов, а при расчете конти­
нуальных систем зависит от густоты сетки, которой определяется
точность решения. Для того чтобы оценить точность решения, кон-'
струкция может быть просчитана с различной густотой сетки, на­
пример можно сетку сгущать вдвое (при прямоугольной и треуголь­
ной сетках сгущенную сетку можно получать путем соединения
середин сторон исходной сетки). Для того чтобы оценить достаточ­
ность густоты сетки, можно просчитать конструкцию дважды —
один раз с заданной сеткой, а второй раз со сгущенной. По ре­
зультатам расчетов можно, в какой-то степени, судйть о точности
полученного решения. Результаты расчетов на двух сетках могут
быть использованы для экстраполяции. На исходной сетке можно
при решении системы линейных уравнений использовать метод
Гаусса, а для получения решения на сгущенной сетке применять
метод итераций, при этом используются результаты предыдущего
решения.
Таким образом, комплексы по расчету континуальных систем
должны иметь программы генерации сетки и ее удвоения. Построе­
ние и использование таких программ в универсальных комплексах
затруднительно. Подобный подход более просто реализуется в
объектно-ориентированных
комплексах.
В заключение главы,
посвященной МКЭ, рас­
смотрим суперэлементный
подход при расчете конст­
рукций. Конструкции, ис­
пользуемые на практике,
часто имеютсложнуюструктуру. При расчете целесооб­
разно делить их на части
(подконструкции) и состав­
лять окончательную систему уравнений только для границ подструк­
тур междусобой. При таком подходе исходная информация задается
для каждой подконструкции в отдельности и становится более на­
глядной. Каждая из подконструкций покрывается сеткой и является
сложным элементом — суперэлементом. При использовании суперэлементного подхода первоначально составляются матрицы жест­
кости для суперэлементов и далее из матриц жесткости суперэле­
ментов строится матрица жесткости для всей конструкции. Для
495
построения матриц жесткости суперэлементов исключают внутрен­
ние точки, аналогично тому как исключались локальные неизвест­
ные при построении матриц жесткости сложных элементов (см.
§11.6), и неизвестные выносятся на границы суперэлементов. На
рис. 11.42 показана схема конструкции самолета, разбитая на подконструкции — суперэлементы. Нанося на каждую из подконструкций сетку, построим матрицу жесткости для всей конструкции
Г П. 1]
[2, 1]
к=
[1. 2]
[2, 2]
[3 ,2 ]
[2, 3]
[3 ,3 ]
[4 ,3 ]
[3 ,4 ]
[4 ,4 ]
[5 ,4 ]
.
(ii.i7 2 )
[4 ,5 ]
[5 ,5 ]
Квадратными скобками в матрице (11.172) обозначены блоки мат­
риц реакций суперэлементов, а цифрами — номера суперэлементов.
Суперэлементный подход дает выигрыш во времени в том случае,
когда конструкция является регулярной. В этом случае процесс
исключения по Гауссу можно проводить один раз (для одного су­
перэлемента) и далее набирать матрицу реакций из одинаковых
матриц реакций суперэлементов. В больших машинах можно память
делить на разделы и производить счет в каждом разделе, при этом
суперэлементный подход позво­
ляет вести обработку одновре­
менно нескольких суперэлемен­
тов, но процесс управления ста­
новится очень сложным. Следу­
ет обратить внимание на то,
что суперэлементный подход рез­
ко усложняет программный ком­
плекс, по-видимому, его рацио­
нально использовать для объектно-ориентированных
комп­
лексов.
Суперэлементный подход дает
максимальный эффект для расче­
та конструкций регулярных в одном направлении и особенно осесим­
метричных. В этом случае можно построить по матрице жесткости
суперэлемента матрицу жесткости для суперэлемента двойной
длины, далее вновь, используя этот процесс, построить суперэле­
мент четырехкратной длины и т. д. Поясним этот процесс на при­
мере конструкции, изображенной на рис. 11.43. Требуется рассчи­
тать эту конструкцию на действие радиальной и тангенциальной
единичных сил, приложенных в точке L Имея эти результаты,
можно посчитать конструкцию на произвольную нагрузку. Кон­
струкция состоит из одинаковых секций. На рис. 11.44, а показаны
ортогональные проекции секции. На плане показаны локальные и
глобальные связи. В качестве локальных осей лг, z используются
оси, связанные со стержнем. Для узлов «н» и «к» приняты различ496
'3S
w
Рис. 11.44
ные глобальные оси Хн, Ун; Х КУ Ук. Построим матрицу реакции
секции в локальной системе координат (рис. 11.44, б)
~3 EJ
2А» ■ + "
r=
^*нн
^KH
^*нк
^KK.
0
EF
1
0
3EJ
2h*
~EF
" 1
0
0
0
0
0
3EJ
2A3
0
^F
.(11.173)
0
3EJ
2h*_
0
Для построения матрицы реакций в глобальной
матрицу перехода
а
. а
cos у — sin у
0
а
а
cos
sin
С в
а
cos Y sin
0
а
sin ~2 cos
~
системе построим
а
~2
а
~2
(11.174)
497
Для построения матрицы реакций в глобальной системе коор­
динат используем формулу
R = СтгС.
(11.175)
Рассмотрим конкретный пример: a = 45°; s iriy = 0,38268;cosy= ;
= 0,92388; £ £ = 1 0 ; ^ = 1 .
Подставляя эти значения в выражения (11.173), (11.174) и
используя формулу (11.175), получим матрицу реакций для сек­
ции в глобальной системе координат
10,03553 —3,53553 —8,53553 —3,53553
2,96447
—3,53553
3,53553
1,46447
. (11.176)
R =
—8,53553
3,53553 10,03553
3,53553
3,53553
—3,53553
1,46447
2,96447.
На рис. 11.45, а показаны две секции вп л ан ес наложенными
связями. Используя матрицу R для секции, построим матрицу
реакции для системы с наложенными связями
'* i'
К
-R*
=z
-
где
lL
Rli ^кн ^нк "i."
tf„K Л„„ 0 X
_#кн 0 RKK_ x .
(11.177)
ut
^ — ^KK + ^HH*
*к =
Л J
L^KJ
Первое уравнение системы (11.177) имеет вид
Ri = R n Z ±+ R KnZn + R**ZK.
~+
(11. 178)
~+
Решая систему при R ±=^ 0 относительно Zu получим
Z\— R1}RKUZU Лца д
498
(11.1/9)
Подставляя (11.179) в остальные уравнения (что эквивалентно
исключению по Гауссу), получим
'* н
.Я к
"
^HH
Я кн Я п ^н
.
ЯнкЯ,!1*?„„
ЯнкЯи'Якн
^кк
(11.180)
Я.нЛи1*™
L2 KJ
Выражение (11.180) позволяет строить по матрице жесткости сек­
ции матрицу жесткости для двух секций. Подставляя блоки матри­
цы реакций для одной секции (11.176) в формулу (11.180), получим
матрицу реакций для двух секций
г 4,29744 — 1,15874 — 1,52150 —0,63022
1,97997
— 1,15874
0,63022
0,26104
(11.181)
Яг =
— 1,52150
0,63022
1, 15874
4,29744
_—0,63022
0,26104
1,97997
1,15874
Определим перемещения в точке 2 при единичных смещениях
точек 1 и 3 (рис. 11.45, 6,e):
0,42526 —0,176151
Г1 0 0 0
0,59632 —0,24700J
[0 1 0 0
0 0 1 0
, Г 0,42526
0,17615'
0 0 0 1
+ [ —0,59632 —0,24700
0,42526
0,176151
0,42526 —0,17615
0,59632 —0,24700 —0,59632 —0,24700j •
На рис. 11.45, б, в показаны перемещения узлов для двух секций
при единичных значениях перемещений концов. Далее, аналогич­
но, из двух секций строится матрица и определяются перемещения
для четырех секций и, наконец, из четырех секций строятся соот­
ветствующие матрицы и определяются перемещения для восьми
секций. Матрица для восьми секций имеет вид
г
Яз =
3,92288
— 1,00359
— 1,00359 —0,00236
1,91571
0,00098
—0,00098
0,00040
3,92288
1,00359
1,00359
1,91571.
—0,00236
_—0,00098
0,00098
0,00040
(11.182)
Далее произведем замыкание конструкции.
^.
Развертывая это выражение, получим R Z — Е — 0.
7,84104
[
3,8322
r^il
Л .
'1
.0
о
1.
= 0.
(11.183)
Окончательный вектор перемещения восьми точек (J—8) от еди­
ничной тангенциальной силы и единичной радиальной силы имеет
499
вид (см. рис, 11.43)
■ 0,12753
0
0,06766
0,05720
0,02354
0,01942
0,00893
0,00596
Z=
0,00549
0
0,00893
—0,00596
0,02354
—0,01942
0,06766
—0,05720
L
0
0,26095 ' } '
—0,05720
—0,04868 } 2
—0,01942
—0,01694 } 3
—0,00597
—0,00642 I 4
0
—0,00395 } 5
0,00597
—0,00642 } 6
0,01942
—0,01694 } 7
0,05720
-0,0 4 8 6 8 _ } ,
Обратим внимание, что приведенный алгоритм наиболее эффек­
тивен, когда число секций соответствует геометрической прогрессии
со знаменателем 2 (2, 4, 8, 16, 32, ...). В случае континуальной осе^
симметричной конструкции число секции наз­
*.-/. 5 **"^^T^~ ^s
С^v^
начается расчетчиком и
С ■*,
°)
может быть назначено в
с .--.
п
.
“~
соответствии с геометри­
32Z с “Тческой
прогрессией.
с
г.
Можно показать, что
с
рассмотренный алгоритм
n
с
более эффективен, чем
■ E
11'
алгоритм с использова­
— с
с
нием тригонометричес­
n --ких рядов (обычно при­
с --меняемый при расчете
осесимметричных кон­
Рис. 11.46
струкций), причем эф­
фект будет тем больше,
чем больше секций имеет конструкция.
На рис. 11.46,a показана осесимметричная конструкция (гра­
дирня), а на рис. 11.46,6 — конструкция, регулярная в одном
направлении. На обоих рисунках исходная секция выделена штри­
ховкой (в первом случае горизонтальными линиями, а во втором —
вертикальными).
Г л а в a 12
ОСНОВЫ ДИНАМИКИ СООРУЖЕНИЙ
§ 12.1. ВИДЫ ДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ.
ПОНЯТИЕ О СТЕПЕНЯХ СВОБОДЫ
При решении задач в статической постановке нагрузки счита­
ются известными и их числовая величина не зависит от перемещений
системы. Наиболее существенной при динамических расчетах яв­
ляется необходимость учета сил инерции, которые зависят от уско­
рений (вторых производных от перемещений по времени). Любые
нагрузки порождают ускорения, поэтому под статическими пони­
маются такие нагрузки, когда можно пренебречь ускорениями,
т. e. время приложения статических нагрузок велико. Для краткого
ознакомления с развитием динамики рекомендуем книгу Г. В. Смир­
нова «Рожденные вихрем» (М., 1982).
При расчете на действие динамических нагрузок вводится новая
координата — время, поэтому задачей динамики является опре­
деление напряженно-деформированного состояния во времени. Иног­
да при решении динамических задач не вводится временная коор­
дината и учет динамики производится путем введения динамиче­
ского коэффициента, на который умножают деформационно-силовые факторы, полученные из статического расчета. Имеется ряд
задач, которые могут быть решены в такой постановке, называемой
квазистатической. Большинство задач динамики не могут быть ре­
шены в такой постановке. Появление ЭВМ резко расширило рамки
решаемых динамических задач. При динамических расчетах полу­
чается огромное количество выходной информации и задача ее
эффективного использования также является важнейшей задачей.
Следующим обстоятельством, отличающим динамику от статики,
является необходимость учета сил сопротивления. Природа сил
сопротивления сложна и многогранна, поэтому учет сил сопротив­
ления более сложен, чем учет сил инерции. Иногда ими можно
пренебречь, иногда учесть приближенно, но необходимо всегда
помнить, что они присутствуют (нужна хотя бы качественная их
оценка), иначе соответствующие дифференциальные уравнения не
будут соответствовать действительности. В учебнике ввиду огра­
ниченности места не удалось уделить этому вопросу достаточного
внимания г.
Инженеру в практике проектирования приходится сталкиваться
1 См.: П а н о в к о Я • Г. Внутреннее трение при колебаниях упругих систем.
M,* 1960.
501
с различными видами динамических воздействий. На рис. 12.1, a —
г показаны характерные виды динамических воздействий \ Справа
показаны источники динамических воздействий, а слева — харак­
тер изменения воздействия во времени. Нагрузки бывают периоди­
ческими (рис. 12.1, а, б). Наиболее простой периодической нагруз­
кой является нагрузка, изменяющаяся по гармоническому закону;
Рис .12.1
такая нагрузка может возникать от работы машины с неуравнове­
шенными вращающимися массами (рис. 12.1,a). Нагрузка может
быть периодической, изменяющейся в течение одного периода (пе­
риод — время одного колебания) по сложному закону. Например,
гидродинамическое давление от винтов корабля (рис. 12.1, б ) или
от машин с поступательно возвратным механизмом. Периодические
нагрузки вызывают колебания. Для ознакомления с этим вопросом
рекомендуем читателю книгу Р. Бишопа «Колебания» (М., 1979).
1 Рисунок заимствован из кн.: К лаф Р ., П е н з и е н Д ж . Динамика сооруже­
ний. М., 1979.
502
Наряду с периодическими нагрузками имеются нагрузки и непе­
риодические, например нагрузка от взрыва (рис. 12.1, в). Следую­
щим типом нагрузки является нагрузка от землетрясения или подъ­
емного взрыва (рис. 12.1, г). Можно продолжать этот список: дииамическая нагрузка на мостовую конструкцию от подвижного соста­
ва, аэродинамическая нагрузка на самолет и т. д. В дальнейшем
в основном будут рассматриваться нагрузки, изображенные на
рис. 1 2 .1 ,a — г. При изучении динамики удобно использовать
графический дисплей (см. рис. 9.21). Приведенные ниже рисунки
12.14, 12.19, 12.20, 12.24, 12.36 сняты сэкран а дисплея.
Важнейшим понятием в динамике является число параметров,
полностью определяющих положение всех точек системы. Эти пара­
метры носят название степеней свободы. Сначала рассмотрим систе­
му с сосредоточенными массами. В таких системах можно пренебречь
о)
1
Рис. 12.2
силами инерции стержней и учитывать только силы инерции, воз­
никающие от сосредоточенных масс. Число степеней свободы за­
висит от точности расчета. Например, если в системе, показанной
на рис. 12.2, а, учитывать силу инерции поворота, то эта система
имеет две степени свободы (у и ф) (при этом деформацией от продоль­
ных сил пренебрегают), если инерцию поворота не учитывать (то­
чечная масса)— то одну степень свободы (рис. 12.2,6). Число
степеней свободы удобно определять как число связей, которое надо
наложить на систему, чтобы ее массы находились в покое
(рис. 12.2, в). В дальнейшем будем рассматривать точечные массы.
В системе, изображенной на рис. 12.3, а, число степеней свободы
равно числу масс. Если в рамах, изображенных на рис. 12.3, б, в,
пренебречь деформациями от продольных сил, то в системе, пока­
занной на рис. 12.3, б, число степеней свободы больше числа масс,
а в системе, изображенной на рис. 12.3, e,— меньше числа масс.
Если в стержневой системе нельзя пренебречь инерцией стерж­
ней, то система имеет бесконечно большое число степеней свободы
503
и для расчета таких систем необходимо составлять и решать системы
дифференциальных уравнений в частных производных, так как
силы инерции в этом случае зависят как от координаты x , так иот
времени t.
Системы с бесконечным числом степеней свободы можно приво­
дить к системам с конечным числом степеней свободы путем дискре­
тизации. Имеются различные способы дискретизации, простейшим
из которых является метод сосредоточения масс. Рассмотрим балку
rn.
*)
V/////s
2m0df
*’
> ^m.^
d,
^^ ^
■^
<^
' '4
то^г
d<=
4
df Щ &
-^^' ^ — — H
2mgCf,
В)
I 01-
d,
^ ------------------->
а*
^k
. ~*-------------------^
2m0ctz
г)
^гПдй^
л .^ &2_ ^г
2mcfj 2mdj
L^ ^
д)
_
>
^^^^^_^^^^^fc
^^тi^^^_^^^^H
^
^.
W ^.
^ ь— ^ ь— —@— @—
vyy.
^.ftiQCl^
^ ^^^
а2~^^_^___
_ ^2_
^^
W_
^ ^.
@— @— @—
dj й .
*J *Г*& ^rr^>
t
А
d3~ w
Рис. 12.4
постоянного сечения, изображенную на рис. 12.4, а. Разделим
балку на четыре части и сосредоточим массы в трех точках — по­
середине и над опорами (рис. 12.4, б). Каждая из масс собирается
с половин пролетов между массами. Средняя масса собирается
с четверти пролета слева и справа, массы над опорами только с чет­
вертей пролета. Если принять, что массы точечные, то массы над
опорами не имеют перемещений и их можно отбросить (рис. 12.4, в).
Можно использовать более точные модели, сосредоточив массы в трех
точках (рис. 12.4, г) или в шести точках (рис. 12.4, д). Чем больше
принято масс, тем больше степеней свободы и тем точнее результат,
однако одновременно растут и трудности при расчете.
Вопрос о назначении количества масс решается в каждомслучае
индивидуально опытным путем. При расчете на ЭВМ может быть
использован следующий прием: конструкция просчитывается сна504
чала при назначенном количестве масс, а затем при удвоенном и
результаты расчета сравниваются. При совпадении результатов
расчет заканчивается, а при несовпадении — процесс повторяется.
Этот подход не является универсальным, так как при решении
сложных задач он может приа
вести к большим затратам ма­
шинного времени.
В качестве степеней свобо­
ды можно принимать не толь­
ко перемещения каждой из
масс, но и обобщенные пере­
мещения, характеризующие
перемещения всех или не­
скольких масс.
На рис. 12.5 изображена
бесконечно жесткая балка,
прикрепленная к земле непод­
вижной опорой А и стержнем
ВС с жесткостью EF. Перемещения всех точек системы опреде­
ляются обобщенным перемещением Y. Определим массу, соответ­
ствующую этому обобщенному перемещению. Перемещения точек
приложения сосредоточенных масс и произвольной точки будут:
_K,__K
__2V
__зк
_ r_ :
У1 — 4^ ^ ~£* У2
4 » У%
4 » У " 4d ^ '
Скорость точки В обозначаем Y, тогда выражение для кине­
тической энергии имеет вид
K =
M Y 2 (t)
( 12. 1)
С другой стороны,
•2 ,. m2y'i
, yt
д- _ rriiyi
b т2у
^ T ъ +,. тау1
iт3у%
r +. iГ mod^
= _m,i$l
i _ +. m
^ _^ Y_2 +.
,
4d
/УЛ2 1 Г 2 j
(m 1 , 4m 2 , 9m 3
m 04 d \ K 2
+ ^ Ы
9Y-
^ _ _
T j * ^ = ( ю + ж + ^ + ^ т 0
Приравнивая (12.1) и (12.2), получим
/юоч
{12-2>
....
M = ^ (n^ + 4m2 4- 9m3) + ^ ^ .
В данной главе ввиду ограниченности объема рассматриваются
только системы с конечным числом степеней свободы, так как при
использовании ЭВМ любая система может быть приведена (тем или
иным способом) к системе с большим, но конечным числом степеней
свободы. В главе подробно рассматривается движение системы
с одной степенью свободы, а далее показывается, как свести систе­
му с n степенями свободы к л-системам с одной степенью свободы.
Сначала это рассматривается на примере системы с двумя степенями
505
свободы, а затем показывается, как свести эту задачу к проблеме
собственных чисел, дляреш ения которой на ЭВМ имеются стан­
дартные программы, входящие в библиотеку программ линейной
алгебры. Для решения систем дифференциальных уравнений созда­
но большое количество численных методов. Задача решения диффе­
ренциальных уравнений динамики является практически важной,
поэтому для ее решения созданы специальные методы, один из ко­
торых и рассматривается в последнем параграфе главы.
§ 12.2. СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ
СТЕПЕНЬЮ СВОБОДЫ
Рассмотрим систему с одной степенью свободы, изображенную
на рис. 12.6, а. Переместим массу на у 0 и толкнем ее (сообщим
начальную скорость v0). Перемещение у 0 и скорость v0 называются
начальными возмущениями. После сооб­
щения системе начального возмущения
*)
она переходит в колебательное движе­
ние.
%
Колебания называются свободными,
если они вызваны только начальным воз­
мущением. При этом на балку будут
действовать две силы: сила инерции и
сила упругости. Силу упругости опре­
делим с помощью коэффициента подат­
P=f
ливости б, под которым понимается про­
гиб балки в точке, где расположена
точечная масса от силы P = 1 , прило­
женной в этой точке в направлении
колебаний (рис. 12.6, б). Прогиб балки
Рис. 12.6
от действия силы инерции будет
(12.3)
y(t) = bJ(t),
где
J (t) = — my (t)—сила инерции
(12.4)
Л
в (12.3), получим
y(t) = - 6 m y ( t )
(12.5)
y(l) + t f y ( l ) = 0,
(12.6)
1
C0= ---— ■■
Y тЬ
(12.7)
или
где
Дифференциальное уравнение (12.6) называется дифференциаль­
ным уравнением свободных колебаний без учета затуханий. Оно
представляет собой обыкновенное дифференциальное уравнение
с постоянными коэффициентами. Для решения подобных уравне506
ний в математике используется подстановка Эйлера
y(t) = Cekt.
(12.8)
Подставляя (12.8) в (12.6), получим
k2Cektjrti)2Cekt = 0 или (£2+ со2)Се^ = 0;
ekt=£0 при любом t . Итак,
£2+ со2= 0, откуда k = ± V — со2= ± со/,
(12.9)
где i = V — 1—мнимая единица.
В соответствии с выражением (12.9) получили два значения:
^i = coi и &2= — он. Дифференциальное уравнение (12.6) имеет
второй порядок, следовательно, его общее решение должно зави­
сеть от двух произвольных постоянных:
yi t) = C ^ * + Cf**.
(12.10)
Подставл-яя в (12.10) значения kx и k2t получим
y(t) = C f M + Cjrto*.
(12.11)
Представим решение (12.11.) через тригонометрические функции.
В соответствии с формулами (13.123), (13.124) имеем
*fo_*-ta
>*_L--*a
(12.12)
s in a = ----------- • cosa==— ^_-----e
В правильности формулы (12.12) можно убедиться, подставляя в
них разложения функций eia, sin a , co sa в ряд Тейлора. Решая
уравнения. (12.12) относительно eia, будем иметь
eia = cos a
I 1 sjn a . ^
. a. )t
e-ia _ c o sa — t• sin
'(12.13)'
Заменяя в выражении (12.11) еш и е~~ш по формулам (12.13),
получим:
y (/) = Ci (coso)^ + i sinco/) + С2(cosw/ — 1 sina>/) =
= (Сх + C 2) cos о)t 4- (Ct — C2) i sin со/, (12.14)
у (/) = — (Cx + С2) со sin со/ + (Сх—С2) ш cos со/.
( 12 .15)
Найдем постоянные Сх и С2 при t — 0:
г/(°) = г/о; y(0) = v<,(12.16)
Подставляя в (12.14), (12.15) значение ^ = 0 и используя (12.16^
получим:
Ci + C, = y,, ( C , - C , ) i ^ = v,, Ct - C 2= lX
(12.17)
Подставляя (12.17) в (12.14), получим (обратим внимание на то,
что после подстановки мнимая единица i сокращается)
у (/) = уйcos со/ + ^- sin со/.
(12.18)
507
Для удобства исследования уравнения (12.18) его можно запи­
сать в виде одной тригонометрической функции, используя новые
произвольные постоянные Y и ф0:
Уо =
у sin Фо,
^ = Y cos ф0.
(12.19)
Возводя оба уравнения в квадрат и складывая, а также деля
первое уравнение на второе, получим
r =
/ ^ o
+ ( 5 ) 2, 9o = a r c t g ^ .
(1 2 .2 0 )
Если для Y взять арифметическое значение корня (со знаком
плюс), а для ф0— главное значение, то новые постоянные будут
единственным образом выражаться через старые и замена посто­
янных возможна. Итак, подставляя (12.19) в (12.18) и используя
формулу синуса суммы двух углов, получим
y ( 0 = ysin(o>/ + 9o);
\
v (0 = if (0 = Y ac o s (at + ф0). /
Рассмотрим различные варианты начальных возмущений.
В a p и а н т 1.
0(O) = 0o. 0(O) = O.
(12.22)
Подставляя (12.21) в (12.20), получим
^ = К этф о , 0 = Усосозф0.
(12.23)
Из второго уравнения (12.23) созф0= 0, следовательно,
ф0= я/2.
Подставляя ф0 в первое уравнение системы (12.23), получим
y 0= Y s i n y = K.
(12.24)
Подставляя Y и ф0 в первое уравнение (12.21), получим
У (0 = #osin (°^ + т ) = y ° cos ^ *
(12.25)
На рис. 12.7, а показан график движения массы во времени
в соответствии с уравнением (12.25). Таким образом, если откло­
нить массу на расстояние у 0, то она будет двигаться во времени по
закону косинуса с постоянной амплитудой, равной начальному
отклонению.
В a p и а н т 2.
y(0)= 0, v(0)=vo
(12.26)
Подставляя (12.26) в (12.21), получим
0 = Y sin ф0, Vo=Ya cos ф0.
(12.27)
Из первого уравнения системы (12.27) имеем sin ф0= 0 (в противном
случае нет колебаний), следовательно,
Фо=0.
508
^
(12.28)
Подставляя (12.28) во второе уравнение системы (12.27), получим
t^o= Y ш cos 0 = Y со, откуда
Y=Vo/a>.
(12.29)
Подставляя (12.28) и (12.29) в первое уравнение (12.21), получим
у (^) = ^L sin сot.
(12.30)
На рис. 12.7, б показан график движения массы в соответствии
с выражением (12.30). Таким образом, если сообщить массе начальy(t)
*)
@ ------ 7 ------ / \ ----
^
------------- J ----------------------------
'
2 , (ubV
9в + т
,g(t)
Рис. 12.7
ную скорость v0, то она будет двигаться по закону синуса с постоян­
ной амплитудой Y = ^ .
В a p и а н т 3.
y(0)=yo, v(0)=v*
(12.31)
Подставляя (12.31) в (12.21), получим
^o=^sincpo, v0= Y со cos q>j.
Решая систему (12.32), будем иметь
F = y ^
+ ( f ) ,
Ф„ = агс1§ ^ .
(12.32)
(12.33)
509
На рис. 12.7, в показан график движения массы для этого случая.
Периодом колебаний T называется время одного колебания. Пе­
риод тригонометрических функций равен 2n. Отсюда
2ft-co71.
(12.34)
Решая уравнение (12.34) относительно со, получим
o)=2n/T.
Таким образом, со, входящее в дифференциальное уравнение (12.6),
есть количество колебаний за 2я секунд. Эта величина называется
круговой частотой. Она является характеристикой системы и вы­
числяется по формуле
C0=
1
(12.35)
В соответствии с формулой (12.35) частота не зависит от началь­
ного возмущения. Обратим внимание на то, что на этом свойстве
основаны струнные музыкальные инструменты. Тон, издаваемый
струной, зависит от частоты ее колебаний и не зависит от величины
начального отклонения. От величины начального отклонения зависит сила звука. Если бы тон менялся от начального возмущения,
то был бы невозможен существующий принцип работы музыкаль­
ных инструментов.
Приведем примеры определения частот.
Пример 1. Д л я систем ы , и зоб р аж е н н ой н а р и с . 12.8, а , оп ред ел и м ч аст от у
со. О п ред ел и м п р о г и б от единичной силы , п ри л ож ен н ой в н ап р ав л е н и и колебаний
(р и с . 12.8, б):
2
1 1 1 2 1
б==£ 7 ‘ Т
Т
Т
У
Т
/3
^ m
D '
( i2 .3 6 )
П о д ст а в л я я (1 2 .3 6 ) в (1 2 .3 5 ), получим
“=
Y
*ЩГ-
<12;37>
П р и м е р 2. О п ред ел и м ч аст от у колебаний для защ емленной п л аст и н к и п ост о­
янной тол щ ины . П р о и зв е д е м д и ск р е т и зац и ю и зам ен и м п л аст и н к у системой с од ­
ной ст еп ен ы о св об од ы (р и с . 12.9, а):
M = m0 T T = ^ Г '
где
510
т 0— м асса
1м2 п л аст и н к и (/ и 1Х в м е т р а х ).
<12-38)
r
a)
S)
м
Я=/
«Ю
1
1/2 **------>
1/2
<------>
L/2
<------*
■
'/^/////////^^^^
wxxwx/xx <xssssssssss.
p f
г— н
т ^ :й
п
*
^V g1 _^ j:
^ ^ ^ ^ ‘p ^
____^>
iV>* ^N
T/4^ U4^
0^
Vf v
ШШУ/, шту/. в Н "
1/2 >. 1/2
<-----^ ------- >
I
p *
I *
%
{
I
i » ®
Рис. 12.9
О п ред ел и м п р о г и б п л аст и н к и о т единичной силы , для чего р азд ел и м п л аст и н к у
н а четы ре к он еч н ы х элемента (р и с . 12.9, б ). В табл . 11.7 привед ены р е а к ц и и , в о з ­
н и к а ю щ и е в у з л а х к о н е ч н о г о эл ем ента, р а б о т а ю щ е г о н а и зги б п р и единичны х смещ е н н я х . В соот в ет ст в и и с этой таблицей
г = 4 ^ [4 (Р * + р -зН -1 (1 4 -4 ц )],
О U
где P = T*
или в н аш ем сл у ч а е
а = Т ' 6 = т : ' = ^ 1 4 Г + р - 2) + ^ ( 1 4 - а д
где f>= yП о р е а к ц и и r найдем п од ат л и в ост ь
A = 1_
6
=
//i
1
_ --------------------------------------------- ;--------------------------
(12.39)
16-[4 ^ * + p - * ) + ^-(1 4 _ 4 ji)J*
П о д с т а в л я я (1 2 .3 8 ) и (1 2 .3 9 ) в (1 2 .3 5 ), п ол учи м
Л//
w=
Г
D 64[4(РМ-Р-2) + у ( 1 4 - 4 М)]
( / / i) 2
m0
V
— /2
V
m 0 V’
(1 2 .4 0 )
= 8P-1 ^ 4 ( P 2+ p-?) + l( 1 4 (1- 42 .4u1)).
П од сч и т ае м к оэф ф и ц и е н т у п р и p = l
y = 8-l
, ^
и ji = 0 , l 5 :
y ^ 4 (12 + 1 - 2) + ^ - ( 1 4 - 4 - 0 .1 5 ) = 2 6 ,1 4 4 .
(12.42)
П о с п р а в о ч н и к у 1 у — 3 5 ,9 9 9 .
1 См :
П роч н ост ь .
tf. Л . Б иргера и Я • Л
У ст ой ч и в ост ь.
К ол ебан и я.
П а н о в к о . М . , 1968.
Т ом
3 /П од
общ .
ред .
511
П од сч и т ае м п р о ц е н т р а с х о ж д е н и я :
3 5 , 9 9 9 - 2 6 ,1 4 4
3 5 ,9 9 9
Т а к и м о б р а з о м , п р и делении
ч а е т ся д о ст а т о ч н о г ру бы м .
п л аст и н к и
100=27,3
на
%.
четы ре эл ем ента р е зу л ь т ат п ол у ­
Рассмотрим далее колебания с учетом собственного веса. Учтем
в выражении (12.3) силу P - m g .
y (t) = l - m y ( t ) + Pj8,
(12.43)
y ( t ) + e> *y(t) = Z ,
(12.44)
откуда
где
1
V тбо*
Решение дифференциального уравнения (12.44) представим в
виде
y (0 = * o (0 + * i(0 ,
где y 0(t) — общее решение одйородного уравнения (правая часть
равна нулю); y^t) — частное решение неоднородного уравнения.
В соответствии с предыдущим (12.21)
y o ( t ) ^ Y sin (соЖро).
СО==
Частное решение будем искать в виде ^i(*)=C==const.
w£
Подставляя это значение в дифференциальное уравнение (12.44),
получим
P
P
а)2С = tn'
- , откуда
С = mco2
—r .
J
Подставляя значение c o = ^ =
в выражение для С, получим
С = Р б = г /сх.
Окончательно решение дифференциального уравнения (12.44) бу­
дет иметь вид
У (0 — У sin (со/ + ф0) + # ст>
(12.45)
т. e. при учете веса груза колебания будут происходить относи­
тельно статического положения равновесия (рис. 12.10).
512
Графики, изображенные на рис. 12.7, а — в, 12.10, противоречат
тому, что наблюдается в действительности. Так, совершенно оче­
видно, что если массу отклонить от начального состояния, то ее
амплитуда с течением времени бу~л
дет падать и в конце концов масса
'
остановится, а не будет колебать\°о
ся бесконечно долго из-за наличия
^ —^
сил сопротивления, которые приЦ - — ^ " ^ ^ №п
сутствуют при движении. Сопро'A
тивление порождается внутренним
сопротивлением в материале, не­
совершенством опорных закреплеШ^Ш^//
ний
и
т’ д*
Рис
12 п
Рассмотрим случай, когда соп­
ротивление моделируется вязким
трением, при этом считается, что сила сопротивления прямо про­
порциональна скорости (гипотеза Фойгта). Эту силу сопротивления
можно моделировать поршнем, движущимся в вязкой жидкости,
причем между стенками и поршнем имеется зазор, который позволя­
ет жидкости перетекать. На рис. 12.11,a изображена консольная
балка с массой на конце, которая соединена с поршнем, движущим­
ся в вязкой жидкости, а на рис. 12.11, б — условное обозначение
этой модели. Итак, при учете силы сопротивления соотношение
(12.3) примет вид
y(t) = b[— m y ( t ) — cy(t)\
(12.46)
[знак минус у второго слагаемого указывает на то, что сила
сопротивления направлена противоположно скорости y{t)}у (t) + 2ny (t) + со;# (t) = 0,
(12.47)
где
2n = —, со0= - L^_-.
m
V tnb
Уравнение (12.47) называется уравнением свободных колебаний с
затуханием. Для решения уравнения (12.47) используем подста­
новку Эйлера:
yit) = Ce*,
(12.48)
0k2 f 2nk + cOo) Cekt = 0.
(12.49)
Решая уравнение (12.49), получим
&lt2 = — n ± V n 2—cojJ.
Рассмотрим три случая:
1)
со0 > n,
тогда
kx = — n ^ - i V v > l —n2, k2= — n —iV^toо—я2,
(12.50)
или
&j =
— n + io>, k 2 =
— n — io ),
(12.51)
где o) = K®o— пг.
Подставляя (12.51) в (12.48), получим
у (t) = С ^ - " * '0» *+ Cse(-n- ‘“) *= e~nt ( C , e ^ + С2е~ы ).
(12.52)
Применяя замену постоянных интегрирования, использованную
выше, получим
y (/) = y e - ntsin(co^ + cp0);
(12.53)
v (t) = у (/) = — Yne~nt sin (at + Ф0) + Y a e ' " 1 cos (at + ф0).
(12.54)
Рассмотрим общий случай возмущения при t - 0 : отклонение
у(0) = у в и скорость и(0) = у0. Подставляя в (12.53) и (12.54)
t = 0, получим
«/„ = У этф ,,, v0= — У л з т ф 0-]-Кюсозф0.
(12.55)
Из первого уравнения системы (12.55) получим
51пф0= ^ .
(12.56)
Подставляя первое уравнение (12.55) во второе, получим
v0= — nyQ+ Уto cos фд.
( 12.57)
С использованием (12.56) и (12.57) система (12.55) примет вид
Кэшфо = ^ , Y co s % = Jo+J Wo.
(12.58)
Решаясистему (12.58), аналогично предыдущему (12.20), получим:
tg<Po
= Уо
- ^+r ПУо
2—*>9o
= arctg ^ r ^ — ;
& ^°
^ 0__________ Ь 1’о + n y Q ’
V = Y г/о + ( ~ ^ ) 2-
(12.59)'
v
(12.60)
На рис. 12.12 показан график движения массы во времени в
соответствии с выражением (12.53) [У и ф0 см. (12.59) и (12.60)].
Частота собственных колебаний при учете затуханий вычисляется
по формуле
_______
co = Y о)? — я 2*
(1 2 .6 1 )
При малых значениях n можно принимать со = со0, т. e. прини­
мать в качестве частоты собственных колебаний частоту без учета
затуханий.
Вычислим отношение амплитуды для двух моментов времени,
отличающихся на период (рис. 12.12):
Uf
Ае~п*(
Рис. 12.12
Величина у носит название логарифмического декремента колеба­
ний и характеризует быстроту затухания.
2) соo= rt (корни, кратные &x= ife2= — я), тогда
y(t) = ( C ^ C j ) e - * ;
(12.63)
V (0 = У (0 = Сф~пХ— п (С, + C2t) e-"* = [С, (1 - n t ) — n C J e - * .
(12.64)
Определим произвольные постоянные:
^o = 0, у(0) = у а, у(0) = у0;
Уо = С1> ^0 ^= ^2 ЯУо) ^*2:==^0 + ^^/0'
Подставляя эти значения в выражение (12.63), получим
У (0 = [Уа + (^o + n^e) Ц e~ nt = [#о (1 + « 0 + <V] e~nt•
(12.65)
Определим значение /0, при котором выражение (12.65) достигает
максимального значения:
у (t) = (nt/o+ U o- пу0— «2гдЛ— га?Л) e - “* ~ [е0—(и2#„ + ^ e ) *«3 = °*
откуда
o
L» = n {щ V
+ пуау
( 12. 66)
Подставляя значение (12.66) в (12.65), получим
Утах =
Г
Уо ( 1+
L \
~
А
— ) ^ --------il
"(^ o + ^ o )J
щ+пуо/
e v0+ny0.
На рис. 12.13 показан график движения массы во времени в
соответствии с выражением (12.65). Таким образом, при со = n
никаких колебаний не происходит, и система после начального
возмущения возвращается в начальное недеформированное поло­
жение.
3)
ю0 < n,
тогда
k t = — rt + m, k2 — — n — a),
17*
515
где
ti>= V^n2— cog;
у (t) = Сге1-п+<0>‘ + С2е<-п- “) 1= e~nt ( C ^ 1+ C2e~at).
(12.67)
В соответствии с формулами (13.131) и (13.132) имеем
e“ = c h a + sh a , e~“ = c h a — sh a.
(12.68)
Подставляя эти выражения в (12.67), произведя замену перемен­
ных, аналогичную приведенной выше, и используя формулу
(13.133), получим
y(t) = Ye~nf sh (cD* + q>o).
(12.69)
•
Рассмотрим случай ^ = 0, y(0) = y Q, y ( 0) = у0, тогда
#0= Y s h 9 0, y0= — F n sh q ^ + Fcochqv
В
7
£
- V=0,5
5
4
5
? =4 7=2
2
1
X 4
ч
0
V J
1
'2
Nz ^ 7
___
L
-3
"7
R1■
'V=p
-4
-5
■6
-7
■
8D
0,5
1
15
JL
Z
2 ,5
J
3,5
4
4Л5
Рис. 12.14
516
\
^
7 _ V
д д
д д
д1
T
т
f
vt
jr
д
Zt
Д
д
д
д
т
L_ t
д
E
№ 7 15 S
E
V ?
t
t
_г
д\ Z1
5
(12.70)
525
Решая систему (12.70) с использованием формулы (13.134), полу­
чим
^ = arcts ^ f e
<12-71)
Таким образом, в соответствии с (12.69) при со0 < /t никаких ко­
лебаний не происходит. На рис. 12.14 приведены графики свободных колебаний при
различных значениях коэффициента г\ = п/со; при этом у 0 = 3,
у0= 1 5 , со0= 2(Г = я). Кривые, соaj
ответствующие rj = 0 (сравни рис.
.
Ч
I
12.7,e) и т] = 1 (сравнирис. 12.13),
yo
Ji
выделены более темными линиями.
,
^ ^ —r ,
iil
У остальных кривых указаны знащ
* < ^ ^ —ф-’-* °
I
чения г]. Для построения графиков
при г ] < 1 использованы формулы
, > 11<
(12.59), (12.60), (12.53); при т]=
*I
1 — (12.65); при г ]> 1
(12.71),
^Ш ?
( 1 2 ' 6 9 )'
Рис
12 15
Наконец, рассмотрим случай
свободных колебаний с учетом
внешней силы трения. Составим уравнение движения
y(t) = 8 ( - m y ( t ) ± F TV),
(12.72)
где FTp—сила трения, пропорциональная силе нормального дав­
ления и направленная против движения [трение по Кулону—су­
хое трение (рис. 12.15, а)]. На рис. 12.15, б показано условное
обозначение этой модели. В соответствии с (12.72) можно запи­
сать
'y{t) + ®2y{t) = ± ~ Z ,
(12.73)
где
CO=^T=.
У тЬ
Таким образом, дифференциальное уравнение аналогично диф­
ференциальному уравнению (12.44), но сила, стоящая в правой
части, меняет знак при изменении направления движения. Ана­
логично предыдущему (12.45), общее решение дифференциального
уравнения (12.73) будет иметь вид
У (t) = У sin (at + ф0) ± Frp8.
(12.74)
Рассмотрим случай начальных условий y(0) = yQ} y(0) = 0:
y(t) = у 0cos со/ ± f Tp5.
(12.75)
Рассмотрим случай, когда масса движется вниз (рис. 12.16, а).
В этом случае сила трения будет направлена вверх. Колебания
517
будут происходить относительно положения 6FTP (нарис. 12.16, а
показано пунктиром). За счет этого амплитуда станет равной
Уо SFTP.
*
'
Далее рассмотрим движение массы виерх; сила трения будет
направлена вниз. Колебание будет происходить относительно по­
ложения 6FTV (на рис. 12.16, б показано пунктиром). При дви­
жении вверх амплитуда уменьшается на 8FTV и становится равной
у 0— 26Frv. На рис. 12.16, в показан полный график движения
массы при сухом трении.
§ 12.3. РАСЧЕТ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ
ПРИ ДЕЙСТВИИ ПЕРИОДИЧЕСКОЙ НАГРУЗКИ
СВОБОДЫ
Рассмотрим случай, когда на систему с одной степенью сво­
боды кроме сил инерции и сил сопротивления действует сила
P(t) (рис. 12.17):
y(t) = 8[—my(t)—cy(t) + P(t)].
518
(12.76)
Ааалогачяо (12.47) выражение (12.76) можно записать в. виде
y (t) + 2ny(t) + ^ { l ) = ^ P
(12:77)
[обозначения 2n и со0 см. (12.47)JОбщее решение дифференциального уравнения (12.77) может
быть представлено в виде
y(t) = y<>(t)>+yi(t),
(12.78)
где y 0{t) — общее решение однородного уравнения; y 1(t) — частное
решение неоднородного уравнения.
В соответствии с вышеизложенным [см. (12.53)]
y 0 (t) = Yer** sin M + Фо).
(12.79)
Подставляя (12.79) в (12.78), получим
у (t) = Ye-"* sin (<of+ q>*)-+iTi (0Рассмотрим случай действия постоян­
ной силы P(t) = P. Вэтом случае частное
решение будем искать в виде
yA*) = C.
(12.81)
§
Подставляя (12.81) в (12.77), получим
ш? г — L
г —
р
т ’ L ~ m too2
(12.82)
Рис. 12.17
Окончательное решение дифференциального уравнения (12.76)
при P^t) = P будет иметь вид
# (/) = F<r»<sin(G^ + <p0) 4 - ^ 52.*
mcDo
(12.83)
Рассмотрим случай внезапно приложенной силы (груз веса P
доведен до соприкосновения с массой и отпущен) при отсутствии
затухания (n = 0). Начальные условия примем нулевыми:
^ = 0,, y(0) = 0, u(0> = Q;.
0 = Y sinq^H----- -2,
mcoo
0 = 7o)cos9o.
(12.84)
Отсюда
trm%
(1*2.85)
Подставляя (12.85) в (12.83), получим
у (t) - — — sin ( (Оt + i b ) + J L = _ ^ ( 1 _ C 0 S ©0
пто
\
2 /
ma>o
м 0
(12.86)
Подставляя в (12.86) значение и0= ^, L_^ , получим
*/(0='^CT(l-COSCO^.
(12.87)
519
Д ля получения решения (12.87) можно использовать и выражение
(12.45). На рис. 12.18 показан график, соответствующий решению
(12.87). Таким образом, максимальный прогиб при действии внезадно приложенной силы равен 2yZT.
Далее рассмотрим случай, когда P(t) = P Qcos&t (гармоническая
сила). Подставляя P( t) в дифференциальное уравнение (12.77),
получим
У (t) + 2ny (t) + ogу (t) - P° c°s 9 /.
(12.88)
Заменяя cosQt по формуле (13.123), будем иметь
у (t) + 2ny (i) + о 0у (t) = ^
(e** + e - **).
(12.89)
Ввиду линейности уравнения (12.89) его частное решение может
быть представлено в виде
yi(t) = yAt) + y*(t)>
(12.90)
где y2(t) и y 3(t) — частные решения дифференциальных уравнений
Уг (0 + 2я^2 (0 + “ оУг (0 = ^ e ^ ;
(12.91)
y , ( 0 + 2ny,(t) + t f y , ( i ) = ^ e - M .
(12.92)
Найдем частное решение дифференциального уравнения (12.91).
Решение представим в виде
y 2(t) = Y 2eiQi.
(12.93)
Подставляя (12.93) в (12.91) и сокращая на ет , получим
^ ( —0? + 2я(в + ю£) = ^
.
Отсюда
Подставляя (12.94) и (12.93), получим
у 2= — .------ ^ -------- Гчет .
2m (— 65 + 2niQ 4- o>o)
520
(12.95)
V
Проводя аналогичные выкладки, можно показать, что частное ре­
шение дифференциального уравнения (12.92) будет иметь вид
* = - * n l ^ 2 n * + Z > * - * ''
<12'96>
Складывая (12.95) и (12.96), получим частное решение дифферен­
циального уравнения (12.88)
^ ^ “ ^ [ ( о ) о —02) + 2п;0 ^" (wo—02)—2л('б] ‘
(12-97)
Используя формулы (13.123), (13.124), получим
У
2— ^ ----------т Г(®5— 02) cos Qt + 2«e sin е л . ( 12.98)
* (0
w = —гг~
m[(«>o—02)?
+ (2n0)2]
’
J v
’
Аналогично тому, как это делалось при свободных колебаниях
(см. § 12.2), для удобства исследования выражения (12.98) приве­
дем его к одной тригонометрической функции. Введем новые пе­
ременные
<o*—02= Fcos<po, 2nQ = Y s \ u % .
(12.99)
Решая систему (12.99), выразим новые переменные Y и ф0 через
старые:
Y — V (ft>o—02)2+ (2я0)2;
(12.100)
•« * •-:& •
(12Л01)
Подставляя (12.99) в (12.98) и заменяя Y по выражению (12.100),
получим
Ух (0 = —T7J
Р\
=- cos (9/— ср0).
m V (o>o—02)2+ (2пв)2.
0
(12.102)
P
Подставляя относительную частоту £ = — и — -« = Усг в (12.102),
O)0 mwo
получим
У1 ( t ) = — r
/ " - w
Уст ■
;
.
COS
(01
Фо) = куст
+ ( ^ 1) '
COS
(0^ — Фо),
(12.103)
где
k = — - ,,-
1
------ ^ ,
(12.104)
/< .- n - + ( .;.) k —динамический коэффициент.
Аналогично можно показать, что при P ( t ) = P 0smQt
yx(t)=kyCT sin(0/—ф0).
(12.105)
На рис. 12.19 показана серия графиков зависимости динамиче­
ского коэффициента k от относительной частоты £ при различных
521
значениях коэффициента г\. При совладении частот вынужденных
колебаний 0 и частот собственных колебаний од0^=£)<Б©зникает
резонанс и при n = 0 динамический коэффициент стремится к беско­
нечности. Явление резонанса при действии периодических сил мо­
жет привести к разрушению конструкции, поэтому при действии
на сооружение периодических сил с частотой. 0 необходимо прове­
рять, насколько близка эта частота к частоте свободных колебаний
©о- В случае, если n = 0 (затухание отсутствует) и P(t)=P^QS ©/*
решение y±(t) имеет вид
g i( Q =
, , ^ , , . c*s9f.
ffM>ol 1 ~ 6 |
(12.106)
Раесмотрим далее случай, когда на сооружение действует пери­
одическая сила, изменяющаяся по некоторому произвольному зако­
ну (см. рис. 12.1, б). При решении гюдобньюс задач может быть эф­
фективно использован метод разложения функций в ряд Фурье.
Напомним краткоэтот процесс. Любая функция с периодом T может
быть разложена в тригонометрический ряд Фурье
GO
GO
P(f)gsflo + y ^ g / C O s - ^ / + ^ ^ s i n ^ r - i f
522
(12.107)
где
i
e . = y j / ( 0 d^
0
т
a,j = Y ^ f ( t ) c o s ^ - t ' ,
0
(12.108)
т
Приведем пример разложения в ряд Фурье функции, график
которой изображен на рис. 12.20, а. Аналитическое выражение
<0
Рис. 12.20
для этой функции имеет вид:
P ( t ) - 1 , 0 < ^ < я ; P(t) = —1
Определим коэффициенты Фурье:
я
2Я
^
~ 2я j d *
0
я
2я ^ ^
я
~
2
n < /< 2 jx .
2 ~ 0;
2я
a/ = ^ I c o s //d / — 2 s l cos j t d / = 0;
0
я
я
2я
bi = 2S J sin i * d / —^ J sin V d*= ^F (2 — 2 cos /*)•
0
я
523
4
Если k — нечетно (/, 3, 5, ...)» ^« = 77*
Jя
Если k — четно (2, 4У 6, . . . ) , &„ = 0.
Разложение функции Я (t) в ряд Фурье имеет вид
(12.109)
На рис. 12.20, а изображены последовательные приближения
функции P(t) рядом Фурье при / = 1 , 3, 5, 7. Кривая, соответст­
вующая / = 7, выделена на рис. 12.20, а жирной линией.
Заменяя в уравнении (12.77) P(t) рядом Фурье (12.107), по­
лучим
/
о •
у (t) + 2tiy (t) + a>*y (t) = ^ ^ а а+ £ я, cos ^
о * \
*+ £
Ъ<sinT ! 1J '
(12.110)
В соответствии с формулой (12.83) (решение на постоянную
силу) и формулами (12.103) и (12.105) частное решение дифферен­
циального уравнения (12.109) будет иметь вид
где
Здесь
.
__ 2 я /
.
__
n
У Tw7"’ '1 - ^ '
На рис. 12.20, б показаны графики функций y 1(t), соответст­
вующие нагрузке, изображенной на рис. 12.20, a (mo0= 1, n = 0)
при / = 1, 3, 5, 7. Кривая, соответствующая / = 7, выделена бо­
лее темной линией. Обратим внимание на то, что, как и следо­
вало ожидать, эта кривая совпадает с кривой, нзображенной на
рис. 12.18.
§ 12.4. РАСЧЕТ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ПРИ ДЕЙСТВИИ ПРОИЗВОЛЬНОЙ НАГРУЗКИ.
ИНТЕГРАЛ ДЮАМЕЛЯ
Движение системы с одной степенью свободы, с учетом зату­
хания при действии произвольной нагрузки P (/), описывается
дифференциальным уравнением
y(t) + 2ny (t) + щ у (t) = £ &
( 12. 111)
Общее решенне однородного уравнения
Уо (0 = Ye~nt sin (ы/ 4* Фо)-
(12.112)
Найдем частное решение неоднородного уравнения у г (t) (12.111).
Решим вспомогательную задачу. Найдем перемещение массы
$
В)
от начального мгновенного импульса (рис. 12.21, а)
д/
/ = ^ P d t = PAt.
(12.113)
По закону Ньютона
dt>
отсюда
m dv = P dt.
Интегрируя обе части равенства (12.114), получим
дг
д/
J m dv = ^ P dt, mv (At) —mv (0) = /.
(12.114)
( 1 2 . 1 15)
Так как y(0) = 0, то в соответствии с (12.115)
v . m = i -
( 12. 116)
Рассмотрим случай, когда Д ^ ^ О , тогда правая часть уравне­
ния (12.111) равна нулю и его решение имеет вид (12.112).
В качестве начальных условий примем
/
Подставляя эти начальные условия в формулы (12.59) и (12.60),
получим
0
Фо = arctg ^ q r ^ — arctg ^ = 0, Фо = 0;
(12.118)
V — 1 f i f i 4 - ( 1>0 + п^ Л 2 — H2. = J__
у Уо + ^ w J
ф т(0 •
Подставляя (12.118) в (12.112), получим
y(t) = — e~nt sincaf.
и х 7
mco
(12.119)
При / = 1 выражение(12.119) примет вид
ф (t) = — e—rt^sin<o#.
4 7
mco
( 12. 120)
Выражение (12.120) носит название реак­
ции системы на единичный мгновенный
импульс. На рис. 12.21, б изображен
график функции Ф(0*
Далее рассмотрим случай действия на
систему произвольной нагрузки (рис. 12.22).
Нагрузку P (t) можно подставить в виде
суммы элементарных импульсов $1 =
= P(x)dx. Прогиб от элементарного им­
пульса d/
P (т) с1тФ (t —т) =
= ^ ^ V " ( '- * > s m a > ( / - t ) . (12.121)
Полный прогиб от нагрузки P (t)
t
У' У* = i
I Р № e~n(t~%)sin ® ^ —т) dT(12.122)
0
Интеграл (12.122) носит название интеграла Дюамеля. Полный
интеграл дифференциального уравнения (12,111) имеет вид
t
y — Ye~nt sin (to/ + <Po) + -^i0) ,1 P (T)e-"<*-^sin a ( t — т) dx. (12.123)
0
Рассмотрим случай внезапно приложенной силы P при n = 0.
Начальные возмущения равны нулю, следовательно,
t
С
^
= i i P s i n ( 0 (/ — T) dT=^
^ P - iS ^ I ;M
о
t2 U _ ^ ( ,_ * * ^ .
Выражение (12.124) совпадает с выражением (12.87).
526
(12 .Ш )
В большинстве случаев интеграл (12.122) не берется в замк­
нутом виде, кроме того, функция P(x) часто определяется непо­
средственно по результатам эксперимента и реакцию системы y x (t)
следует вычислять численными методами.
Развернем выражение для s in w ( f -x ) :
sin (сof — сот) = sinw/co5 шт— coswf sincox.
(12.125)
Подставляя (12.125) в выражение (12.122), получим
t
Ух (0 = si*1®t ~ ^ P (т) е~п (/~т) cos WT d t —
о
t
— cos Ы —
СP (т)
е~п <*-*> sin ют dx,’
mcoJ
4 7
о
(12.126)
ИЛИ
У\ (0 = A (t) sin eof — 5 (f) cos w/,
(12.127)
где
t
\
Л (0 = ^ ^ “ ^ Р (т) enx cos сот dx;
о
t
(12.128)
В (t) = ^ j - J P (t) епт sin сот dx.
о
✓
Таким образом, численное определение интеграла Дюамеля сво­
дится к вычислению интегралов с переменным верхним пределом
A(t) и B(t).
В качестве примера рассмотрим интеграл A{t). На рис. 12.23
показаны функции P ( т) и cosoot и их произведейие /(x) = P (x )x
xcoscoT (n = 0). Для удобства используем равные промежутки
Ах. При решении динамических задач необходимо найти числовые
значения y(t) при ^ = Дт, f2= 2Дх, . . . , f,* = Mx.
Определим значение A(t) в момент времени t t ==At; при этом
можно использовать либо формулу прямоугольников, либо форму­
лу трапеций (табл. 12.1).
T а б л и ц а
Формула прямоугольников
^ i )
'
= - fo A t
ma>
12.1
Формула трапеций
А ( {1) = ±
’
Ь +
Ь Ах
тод 2
Далее определим значение A (t) в момент времени t2; при этом
можно использовать более точную формулу— формулу Симпсона
(подынтегральная функция заменяется квадратной параболой)
л (/,) = л (t,) + ± fr + f f + fr д х.
(12.129)
527
^ *C3
zostii
Для tn формула (12.129) будет иметь вид
A (tn) = А (*„_,) + ± . fn-2+Jn- i + h Дт
(12130)
Аналогично вычисляется и интеграл В (t).
На рис. 12.24 приведены результаты расчета системы с одной
степенью свободы с использованием интеграла Дюамеля. Действую­
щая нагрузка выделена на рис. 12.24 вертикальной штриховкой,
m = 0 ,l; со0= 5; т\= п/соо= 0,2. Масштаб для нагрузки указан
слева от графиков, для перемещений yx {t)—справа. Для назна­
чения шага интегрирования использовалось последовательное
уменьшение шага вдвое до тех пор, пока результаты, полученные
при шагах, отличающихся вдвое, не совпали между собой. До
момента времени tk (пока действовала нагрузка) вычисления про­
изводились с использованием численного интегрирования [см.
(12.127)]. После окончания действия нагрузки система переходит,
в свободное колебательное движение. Д ля построения графика
использовались формулы (12.53), (12.59), (12.60), причем y Q— y { t k),
vn= у' (tk) = tg р. Перемещение у (tk) вычислялось по формуле
(12.127). Для вычисления y ' ( t k) можно использовать либо конеч­
но-разностное выражение
-//* * ,_ y ( t k ) - y ( t k - b x )
у у*)---------- к -------»
либо выражение, соответствующее точному значению производ­
ной,
y' (tk) = A (tk) (со cosco^— nsin<o/) + B (tk) (со cosco^+nsinW ).
§ 12.5. ДВИЖЕНИЕ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ.
ПРИВЕДЕНИЕ СИСТЕМЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
К ДВУМ СИСТЕМАМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
На рис. 12.25, а изображена простейшая упругая система с
двумя степенями свободы. На рис. 12.25, б показаны деформации
системы при действии на нее единичных сил, приложенных в точ­
ках, где расположены массы в направлении их движения. В соот­
ветствии с рис. 12.25 а , б можно записать
yi = 6ii [— в д ( 0 + p i (0] + 6i2 l - m j 5 t ( t ) + p i ( 0 ) ; ) (i2 .i3 i)
Уг —■^21 [ —т\У\ (0 ~ Г ^*1 (0] + ^22 [ ~ тгУ2. (0 + Р2 (0] j
или
&11ЩУ1 (t) + 612m2y2 (t) + г/! (t) = б11Р 1 (t) + 81гР 2 (*); • (12.132)
fiSimiУ1 (0 + б2-2mJ}i (0 + Уг (0 = ба1Л (0 + б2ар 2 (t). J
Запишем равенства (12.132) в матричной форме
BMy(t)+~y(t) = BP(t),
(12.133)
529
Здесь т 0 и 80— соответственно масса и перемещения, принятые
в качестве основных (эта операция необходима для упрощения
последующих арифметических вы­
кладок, например можно вынести
из матриц буквенные сомножители);
P ( A = P * l(0
l )
k ( o
Таким
образом,
уравнение
движения для системы с двумя
степенями свободы выглядит аналогично уравнению для системы
. ^ _______ h _ ^ ^ ^ A _ . с одной степенью свободы, толь^n
hz
^ ко вместо податливости б испольРис. 12.25
зуется матрица податливости Я,
вместо •»массы m — матрица масс Ж,
вместо перемещения и ускорения у, у — векторы перемещений и
~> ~••>
^>
ускорений y> у , вместо нагрузки P(t) — вектор нагрузки P ( t ).
Подставляя в уравнение (12.133) вместо В и M приведенные
выше выражения, получим
8, m,BMy(t) + y ( t) = BP (t).
(12.134)
Деля обе части уравнения (12.134) на т 080, получим
* " s < '> + s
Однородное
имеет вид
уравнение,
^
(
0 =
s
^
соответствующее
B f f l ( t ) + ^ y ( t ) = 0.
( 0 -
уравнению
(1 2 J3 5 )
(12.135),
(12.136)
В § 12.2 показано, что в случае системы с одной степенью
свободы решение будет иметь вид
У (0 “ Y sin (cof + ф0).
Естественно предположить, что в случае системы с двумя степе­
нями свободы каждая из масс движется по одному и тому же
530
закону sin(w/ + <Po)* Н0 имеет свою амплитуду (колебания типа
стоящей волны)
У
(0 = ^ J sin (со/ + Ф0) = Y sin (соt + ф0).
(12.137)
Подставляя (12.137) в (12.136), получим
— aPBMY эт(со/ + ф0)^—т 0о0
^-Уз1п(со/ + ф0)= 0 .
(12.138)
Деля уравнение на (— о)2) и вынося sin(w^ + cp0), получим
( в Я ? ~ 5 4 А ? ) 5 | Л <И ' + ^
Сокращая на sin(co/ +
9
=
0-
0) и вынося Y, получим
(BM -XE)Y = 0
или ^ M Y = XY,
(12.139)
где E —единичная матрица (ее введение порождено тем, что из
матрицы можно вычитать только матрицу, а не число);
.b = T
xо0Со2т^ ю
v(12.140)’
Система (12.139) представляет собой систему однородных линей­
ных уравнений относительно Y. Эта система (см. § 13.5) либо
имеет единственное решение Y — 0 [этот случайсоответствуетотсутствию колебаний, см. (12.137)], либо имеет множество решений
Y Ф 0. В этом случае
'
det {В М — ХЕ) = 0.
(12.141)
Развернем это выражение:
Г б ц ^ — Х 6l2m2
[ 6 2im i
1
0.
622m2— ?iJ
М — ФиЩ + \ J n 2) к + (бцб^— б у тгщ = 0.
(12.142)
Вводя обозначения, получим
6^ n h + ^ r n , = sp B M = p;
\ .
( М . . - «У тхт.г = det B M = q. J
Подставляя (12.143) в (12.142), получим
X2— p k ^ - q = 0;
^ 143)
^
<12Л44)
В соответствии с выражением (12.144) можно найти два зна­
чения % (причем можно показать, что эти оба значения будут
действительными в предельном случае может оказаться, чтоХх = Х2).
Этим двум значениям % в соответствии с формулой (12.140)соотK
. - i *
V
W
7 '- )
531
ветствуют два значения со:
Й1=7
Ш
’
“2 = У е т г
(12Л45)
Таким образом, у системы с двумя степенямисвободыестьдЕе
собственные частоты (в предельном случае эти частоты могут сов­
падать).
Из уравнения (12.139) определим значения амплитуд У, соот­
ветствующих coj и со2. Как следует из предыдущего, Ки 2 найдено
из условия, что det (B M — kE) = 0, т. e. уравнения (12.139) являются
линейно зависимыми и отличаются одно от другого множителем.
Используемдля симметрии формул при определении Ki = fYn Уi2] r—
первое уравнение, а при определении Уг — [У%гУ^У — второеуравнение:
(S u m i —
К) У и
+ 812m2Y 12 = 0;
(1 2 . 146)
&>i™iУп + (б22т 2 — А2) У22 = 0.
(1 2 .1 4 7 )
Примем Yxi = 1 и У 22 = 1, тогда в соответствии с выражениями
(12.146) и (12.147) получим
Г 12 = — 4 mi~ Xf ,
6i 2^2
У21 = — F* f * r u .
62i^l
(12.148)
Матрица собственных форм будет иметь вид
Y=
Первый столбец матрицы (12.149) определяет форму колебаний, со­
ответствующую cOi (первая форма), а второй — со2 (вторая форма).
Если векторы, характеризующие собственные формы (12.149),
умножить на постоянное число, то они будут удовлетворять условию
(12.139), т. e. будут являться векторгми собственных форм. Напри­
мер, можно из вектора вынести максимальную координату, тогда
наибольшая координата будет равна единице, а остальные — мень­
ше единицы. Можно выносимый коэффициент подобрать так, чтобы
длина вектора была бы равна единице. Описанный процесс носит
название процесса нормирования векторов собственных форм.
Подсчитаем силы инерции, соответствующие первой и второй
собственным формам. Итак,
Подсчитаем работу сил инерции, соответствующих первой форме
на перемещениях, соответствующих второй форме, и наоборот. Эти
работы в силу теоремы о взаимности работ равны друг другу:
(12.152)
*^Т# 2 ( 0 ■— ^\У\ ( 0 — у\ ( 0 ^ 2 '
Подставляя (12.150), (12.151) в
sin (co^ + ф0) sin (сoJ 4- ф0), получим
(12.152)
и
сокращая
на
— ofKj МУ2 == — о)?К1 МУ2.
Перенося все слагаемые в левую часть, будем иметь
{оу1— щ ) У 1 М У 2=^0
при
ш ^б)
(12.153)
Y l M Y 2= 0.
Если M = E (единичная матрица), то векторы Уг и У2 являются
ортогональными (см. § 13.7); если М ф Е , то векторы, соответ­
ствующие выражению (12.153), называются ортогональными
с весом М.
В силу (12.153) имеем
1
Y ii
Y TM V
- [
rrii
0
Y 12
1
ь
1
_0
т„
Y 21
Y 12
_
°_
1
щ + пцУЪУ
(12.154)
Поделим вектор, соответствующий первой форме (12.149), на
V w l -m,V'i'.,, а вектор, соответствующий второй форме, — на
У т2^ - т ^ 1 и тогда матрица собственных форм будет иметь вид
1
Yti
(12.155)
F=
-
V^/Hl4"^2^12
V^tn2 -^tTlJf21
-
При этом получим
Y T M Y = E.
(12.156)
Вернемся к уравнению (12.133) и перейдем в нем к новым
неизвестным
y (t) = V z ( t ) y ( t ) = Y z ( t ) .
(12.157)
533
Подставляя (12.l57)B (12.135), получим
BM vfit)
(12.156)
60m0
Для симметрии умножим обе части системы (12.158) на (Л1К)Т =
= У ТМ ! = Y M .
Тогда
7 тШ Ж Г г ( 0 + щпц
^ Р т Ж К г(/) = ^mо- Р т Ш ? ( 0 . (12.159)
В соответствии с (12.139)
BMY, = K Y u
B M Y , =A*r*
или
К
ВМ У=[¥,
Y 2]
о
o i
_
к.
(12.160)
где
A
0
=
К.] •
ГТодставляя (12.160) в (12.159) и используя соотношение(12.156),
получим
Лг (t)
+ j J - z(t) = —
Y ' M B P v(t).
к 7 1 bQm0 ' 7
m0
7
(12.161)
Матрица Л является диагональной, следовательно, система диффе­
ренциальных уравнений (12.161) содержит два независимых диф­
ференциальных уравнения.
Таким образом, задача об
._ Sg/ Pz- 1
$77
исследовании системы с
двумя степенями свободы
свелась к исследованию
двух систем с одной сте­
пенью свободы, а решение
подобных задач уже рас­
смотрено в § 12.2—12.4.
Пример1. Нарис. 12.26,
а изображен консольный
/ 'w r n .
стержень с двумя массами,
Р и с . 12.28
к которым приложены две
силы Pi(t) и P 2(t). Эта
система является системой с двумя степенями свободы, причем
система дифференциальных уравнений будет связанной. Требуется
получить для решения этой задачи систему разделяющихся урав­
нений.
1
Д ан н ы е для п р и м е р а взяты и з у ч е б н о г о п о с о б и я : А л ек сан д ров A , В # Д и н а ­
м и ка т р а н сп о р т н ы х со о р у ж е н и й . М . , 1976,
534
Пострвим матрицы В (рис. 12.26, б) и Mi
2 , ___ f _ .
3E J ’
3 й “
h
ii
—
'
JL Л2
21 — £ /
* . =
* T
r 4
* 2
5Ё. _
‘ 3
w
-
5
d3 2
6EJ- 5- 16
3 0
M=m<,M= m0^Q 1
В = 6 аВ =
f ^ =
^ 3 .
6E J
*
w
:
С
"
d3
°® —
6E J
m0d3
‘б£7
(12.162)
Вычислим произведение #Л1:
6
Я Л = [ 15
51
16j*
(12.163)
Определим Я;
Г 6 -к .
15
5 1
1 6 - ^ J — °*
k * -2 Z k + 2l = 0 ;
Я1,2= 1 1 ± V 121 - 2 E = 11 ± 10,
Вычислим- коврдикаты векторов
собственных форм:
^i = 21, ( 6 - 2 1 ) y ,i + 57,i = 0;
Xi = 21 К2= \.
при Y ri = b , Y ^ = 3t
i* = l,
(6— Ц У 21 + 5Yg*= Q*^
пр» y = f F 21 = — Р.
Матрица собственных форм имеет
вид
^22
Ш%
v=s[ i
" !] •
(12-Ш4)
Вис. 12.27
На рис. 12.27 показаны собственные формы,., соответствующие
^i и Х2. Перенормируем матрицу собственных форм так, что
У тМ У = £ .
Вычислим произведение
3
1
1 г t —i;T гю- e*
1
l J l 3*
lJ = [ 0 4 j‘
Поделим первый вектор собственных форм (12.164) на УГШ, а вто­
рой— на У~4:
Г0,2887 -—0,5
(12. 165)
r = [0 ,8 6 6 0
0,.50 ,51}
П
0]
0,2887 0,86601 f 3,
1 Г0.28Й7 -G■ ,S
°’
Y * M Y - Г
0;5
J \ 1 J ^0-,866O В Д = Ь > Ч
-L -0 r
6,0622' i a, 1865^
Я¥7г^M5Bо = Г&
15] [5
Гб- 16
15
[5. 16J,
5- 0,5j*
У 1 М У
]- К
535
Для нашего случая система (12.161) будет иметь вид
2U". (0 + ~ ,~ г, (/) = ^ - (6,0622P, W - 18,1865P, (0);
* <'> + Т § г г , ( ' ) =
я
(12.166)
( - 0 . 5 P , ( 0 + 0 , 5 P , < ,> ).
лL
а
EJ
1(
ZZ2ZZ^
^
Рис. 12.28
После решения уравнений (12.166) находят прогибы по формуле
y(t)=Vz(t).
(12.167)
Для закрепления материала рекомендуем читателю составить
систему разделяющихся уравнений для рамы, изображенной на
рис. 12.28.
§ 12.6. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ. УРАВНЕНИЕ ЛАГРАНЖА
В § 9.3 пояснено понятие потенциальной энергии для системы
с n степенями свободы, показано, что потенциальная энергия есть
квадратичная форме от координат
а)
.вектора перемещений. Рассмот­
tr
% \и
рим систему с n дискретными мас­
сами; тогда кинетическая энергия
для этой системы может быть пред­
г
ставлена в форме
Ф
(12.168)
tr
где
m*
А
•
M=-
гС
~
~*
; z=
•
Рис. 12.29
•
*
•
т «_
IJji_
( M —диагональная матрица).
Таким образом, выражение для кинетической энергии является
квадратичной формой от координат вектора скоростей перемещений.
Рассмотрим случай распределенной массы. На рис. 12.29, а
изображен стержень постоянного сечения и показаны его степени
536
свободы z=[vHфн Ркфк]т- Предположим, что погонная масса равна
т0; запишем выражение для кинетической энергии при произволь­
ном векторе скоростей
(12.169)
Z= [VPH а д к]т-
Для решения задачи необходимо решить соответствующее диф­
ференциальное уравнение, и выражение для кинетической энергии
будет иметь достаточно щ
сложное
выражение.
Воспользуемся прибли­
%
4}
%
?!
Ъ
женным приемом и про­ 5)
демонстрируем его на
ш/,
примере балки, изобра­
7
v5'
V^'
женной на рис. 12.30, а.
Р и с. 12.30
Разобьем балку на шесть
частей (рис. 12.30, 6) и
предположим, что скорость точек стержней, на которые разбита
балка, меняется по закону кубической параболы, т. e. в качестве
кривой изменения скоростей точек балки прцмем прогиб безынер­
ционной балки. Очевидно, результат будет тем точнее, чем на боль­
шее количество элементов разбита балка. В соответствии с табл. 8.2
можно записать
(12.170)
v (x) — N (x) z,
где
N(x) = l n ^ x ) n ^ x ) п3 (лг) пх (х)]т;
^
2 = К ф н а д к]т;
.
,
,
Зх2 ,
2r*
JT + - >
t h ( x ) = 1---- /?
rt2 (x) = x
2x2
+ /?
.
.
Зх2
2x3
«3 ( 4 = -JT
M *) = - T
13
(12.171)
+ и•J
Кинетическая энергия для элемента стержня длиной dx будет
d ^ = ^r vr (x) m0 dx v (x).
(12.172)
Д ля всего стержня будем иметь
К = у zTm0J NT(x) N (x) dx г.
(12.173)
Подетавляя (12.170)
г i
5 n\ dx
0
1
5 п2пх dx
0
K = ^ z Tm0 i
в (12.173), получим
$ пгпг dx
0
1
J П2 dx
о
i
J n j i x dx ^ n 3n2 dx
0
0
1
1
J n4tti dx J tt4tt2 dx
5 ninz dx
0
1
£ я 2л3 dx
о
i
^ nl dx
0
1
^ n4n3 dx
J Л1 Л* dx
0
1
^ « 2f l4 dx
о
i
^ п3д4 dx
0
1
^ nf dx
(12.174)
С другой стороны,
(12.175)
K = Y zTMz-
Сравнивая выражения (12.174) и(12.175),мож нозапиеатьформулу для построения матрицы масс
13/
11/-
9/
13/2 П
35
2 10
70
420
13/3
/3
420
140
И /2
fA -m ^
210
JL
105
9/
13/2
13/
11/2
70
420
35
210
13/2
420
_____ P _
140
11/'2
m
(12.176)
JL
105
[выражение (12.176) получено после подстановки в выражение
(12.174) функций nt и интегрирования].
Построим далее матрицу масс
*) и
к
для. стержня*, изображенного на
uн
Uu
рис. 12.29, б. Учтем продольные
колебания (рис. 12.31,.a)
v(x) = N ( x ) z ,
(12.177)
где
N (x) = [«! (x)
я 2 (х)]т.
Функции n j(l) и п 2(1) изображены
на рис. 12.31, б. Кинетическая
§ энергия продольных колебаний бу­
дет выражаться по формуле, ана­
логичной (12.173).
Подставляя в выражение(12Л73)
N(x) no выражению (12.177), интегрируя (при интегрировании
можно использовать правило Верещагина) и сравнивая получен538
ное выражение с (12.175), получим
J_6
_^
3^
-_J
~3
M=rn< J^
_6
(12.178)
Объединяя выражения (12.176) и (12.178), получим матрицу
масс для стержня, изображенного на рис. 12.29, б:
ж ,= Г^нн
L"*KH
'_£
0
3
0
0
35
210
и/2
JL
210
105
0
u
13/2
0
420
13/2
70
420
13/2
/3
420
140
~7
0
0
13/
11/2
35
210
3
0
420
f _
0
' 140
0
91
0
13/2
70
0
0
0
91
0
Юкк.
6
11/2
6
—-
J_
о
13/
~
Ш
пк
11/2
-
(12.179)
Л
105
210
Используя процесс, аналогичный описанному в § 9.4, из матри­
цы масс (12.179) построим матрицы масс для стержней, изображен­
ных на рис. 12.32, а, б.
Рассмотрим случай, приведенный на рис. 12.32, а. Матрица
перехода для этого случая имеет вид, приведенный в табл. 9.3.
Используя эту матрицу перехода, получим
r * = L 1 M iL
'j_
3
0
J_
M* = m,
6
0
L
0
0
33/
140
0
39/
280
11/2
280
J_
6
0
J_
~з
0
0
т нн
т пк '
т кя
«кк.
»
0
0
39/
11/2
280
280
0
0
17/
6/2
35
011
~ ~ 7б~
2/3
70
~
(1,2.180)
105 _
539
Аналогично для стержня, изобра­
женного на рис. 12.32, б, имеем
[см. формулу (9.48)]
<4
\<r*
V
I
GEJ
, 2EJ
6EJ
^2
^Н~Ь ^ Фн
^2
,
^K “Ь
4£7
1
Л
Фк
^>
(12.181)
f
Фк
’
3
21 ^ н
1
,
о ^ н ;
3
о 1 ^к •
21
(12.182)
ик
В соответствии с выражением
(12.182) матрица перехода для
Р и с . 12.32
стержня, изображенного на рис.
12.32, б, приведена в табл. 12.2.
Используя матрицу перенумерации L, приведенную в табл. 12.2,
получим матрицу реакций для стержня, изображенного на
рис. 12.32,6:
v
i
i
T а б л и ц а
Перемещения
ин
ин
1
VH
ик
<f>H
1
ик
1
^к
фк
„3
id
1
» /2/
~ v 2
J_
3
J_
0
17/
0
^H H
=
VK
1
Vn
фн
£
12.2
_WKH
^HK
ткк
=
Щ
0
0
з/2
35
35
3 /2
2 /3
~~35~~
105
~
6
0
6
0
39/
0
280
11/2
0
280
(12.183)
~
0
0
39/
11/2
280
280
з
0
33/
0
140
Д ля примера построим матрицу масс для системы, изображен­
ной на рис. 8.5,a (в § 9.4) (для этой же системы построена
матрица жесткости).
Стержень
U В соответствии с формулой (12.183) имеем
ткк = т{
540
г !
1
о
33а
^T
(12.184)
Из матрицы (12.183) выбран только блок т ^ к, потому что
только этот блок используется при построении матрицы масс
в глобальной системе. Используя матрицу преобразования (9.59),
получим
'4 а
0
0 1
т
m,
М1К
ПК
)
33а — 1 0
0
-[? -J]
35
-I? -J] m,
I~ЗЗа
4а"
0
3
33а
т 0
=
0
0
35
0 ’
35
(12.185)
4а
о
г—
3"J
С т е р ж е н ь 2. Д ля стержня 2 (см. рис. 8.5, а) локальная
система совпадает с глобальной, поэтому в соответствии с (12.180)
будем иметь
а
а
0
0
т
99 а
0
И0
а
m,
0
T
117а
0
280
99а2
0
" 280
0
а
0
117а
99а2
280
280
0
Ш
27а2
35
0
(12.186)
0
35
27а2
18а3
35
105
С т е р ж е н ь 3. в соответствии с формулой (12.17
5а
Щ*н
т
п
и
0
0
0
13а
'5 5 a 2
7
42
55а3
2 5 а3
- 42
(12.187)
•
21
Из матрицы (12.179) выбран только блок т ию потому что
только этот блок используется при построении матрицы масс.
Используя матрицу преобразования (9.64), получим
5a
л® =
3/t 5
4 1/ 5
0
4/t 5
3 1/ 5
0
0
0
1
т
0
0
0
Vto
55а2
7
42
55а2
25а3
42
21
313а
16а
22а3
175
Г75
21
16а
911 а
11а2
T75
525
14
22 а 2
11а2
25а3
21
14
21
0
3/{
Vt
L0
-Vi
3/
/5
0
0
0
1
(12.188)
541
Используя матрицымасс (12.185), (12.186) и (12.188), построим
матрицу масс для системы, изображенной на рис. 8.5,as
M^
M=
Л*кк +
68 а
а
0
Ж
0
117а
99а2
280
280
488а
16а
22а2
175
175
21
И>а
1676а
7а2
0
^20
0
0
117а
0
]-
0
т
857а
0
M 2
280
175
525
490
9 9 а2
2 2 а2
7а2
1 43 а3
П
(12.189)
0
28СГ
21
490
105
L
Используя условие несжимаемости (9.67), преобразуем мат~>
рицу M (12.189) к вектору скоростей перемещений г±:
M 1= L TML=^m{
4992а
6 2 2 3 а2
315
4410
62 2 3 а2
143а3
4410
105
[13.6254а
ll,4 U lo "
1,4111а-]
l,3619a>l' 1
1
-
Движение любой системы может быть описано с помощью урав­
нения Лагранжа
T ( f ) - f + f - + f - ^ w .
<«•>*•)
где z {—обобщенные координаты (перемещения), описывающие
поведение системы (в случае стержневой системы линейные и
угловые смещения);
i ~* ~*
n ^ ^ z TRz — потенциальная энергия;
(12.192)
1^ ^
Я = у г тЖ г— кинетическая энергия.
(12.193)
Уравнения вида (12.191) можно составить столько, сколько
степеней свободы имеет система.
По сравнению с уравнением Лагранжа, изучаемым в курсе
теоретической механики, в уравнении (12.191)добавленослагаемое
^ r , которое характеризует рассеяние энергии (диссипацию) и
dz
носит название функции Рэлея. Введем эту функцию, аналогично
выражениям (12.192) и (12.193),
Ф = j- ^ C z ,
(12.194)
где С — матрица диссипации, определяемая экспериментальным
путем.
542
При статическом действии нагрузки K==0 и Ф = 0 уравнение
Лагранжа принимает вид
% -Р ,.
(12.195)
Выражение (12.195) соответствует принципу стационарности полной
энергии системы. Введем понятие полной энергии системы (под си­
стемой понимается упругая система плюс нагрузка). Под полной
энергией системы понимается работа, которую надо совершить,
чтобы перевести систему из деформированного состояния в началь­
ное недеформированное состояние. Эта работа состоит из двух сла­
гаемых: работы виешних сил и работы внутренних сил. Очевидно,
что при переводе из деформированного состояния в начальное не­
деформированное внешние силы будут совершать отрицательную
работу, а внутренние — положительную. Работа внешних сил при
переводе системы из деформированного в начальное недеформиро­
ванное состояние будет
Ap = - Z ' P .
(12.196)
Работа внутренних сил равна потенциальной энергии, накоп­
ленной в системе:
Л5 = Л.
(12.197)
Тогда полная энергия системы
W ^ n — ЪР.
(12.198)
Функция (12.198) называется функцией Лагранжа. В соответствии
с принципом стационарности полной энергии системы система на­
ходится в равновесии тогда, когда полная энергия системы (функ­
ция Лагранжа) принимает стационарное значение. Дифференцируя
выражение (12.198), получим выражение (12.195). Подставляя
(12.192) в (12.198), получим выражение для полной энергии систе~>
мы, записанное через вектор Z:
W = ± Z TR Z — ZTP.
(12.199)
Обратим внимание на то, что в выражении (12.199) работа внут­
ренних сил имеет коэффициент V2, а работа внешних сил этого
коэффициента не имеет, так как при переходе из деформированного
состояния в начальное недеформированное внутренние силы изменяю тсяипадаю тдонуля(статическоеснятиенагрузки), а внешние
силы остаютсй постоянными. Найдем экстремум функции
dWn
дгл
dW
= RZ— P = 0
(12.200)
дг
' dW
dzn
(производную от квадратичной формы см. § 13.6).
543
Выражение (12.200) совпадает с основным уравнением метода
конечных элементов (уравнением равновесия), полученным в § 11.2,
с позиции принципа возможных перемещений.
Все три функции, входящие в уравнение Лагранжа, являются
квадратичными формами. Вычислим производные для записи урав­
нений Лагранжа. В соответствии с § 13.6 имеем
дП
dZ
дК
= RZ \ ^~~r — M Z \
di
дФ
= cz.
( 12.201)
dZ
дК
Подставляя (12.201) в (12.191) и принимая — = 0 (кинетиdZ
ческая энергия не зависит от координат), получим
(12.202)
MZ + CZ + RZ = P(l).
Выражение (12.202) является уравнением динамического равно­
весия для системы с конечным числом степеней свободы. Если при­
нять скорости и ускорения равными нулю, то получим приведенное
выше уравнение равновесия в перемещениях
(12.203)
RZ = P(t).
Таким образом, уравнение Лагранжа является общим уравнением
как для решения задач динамики, так и статики, для систем с конеч­
ным числом степеней свободы.
Используя выражения (9.68) и (12.190), запишем уравнение
динамического равновесия для рамы, изображенной нарис. 8.5,a:
m,
1,4111а2
1,3619а3
0,0667 ^аr1
0,06674аЛ
1,8
’ —
а
Г-<pJ
Ч = 1IГ7з о v.
1
о
0,4611 4cr-
Си
с 22
о
о
о
+ EJ
13,6254а
1,4111а2
V.
4>2
0] P(t).
+
(12.204)
§ 12.7. ПРИВЕДЕНИЕ КИНЕМАТИЧЕСКОГО ВОЗДЕЙСТВИЯ
К СИЛОВОМУ
Движение системы может вызываться не только внешними
силами, но и принудительными смещениями отдельных ее точек.
Подобное воздействие называется кинематическим. На рис. 12.33
показана одномассовая система при смещении ее опоры на А (/).
В соответствии с рис. 12.33 имеем
y '( t ) = b ( t ) + y(t).
(12.205)
Аналогично (12.4) можно записать
у (t) = 8J = — 8my' (t).
544
(12.206)
Подставляя (12.205) в (12.206) и деля на m6, получим
jj(t) + t f y ( t ) = - A ( t ) ,
(12.207)
или
m А (0
y(t) + ^ y ( t ) =
(12.208)
m
где—m k ( t ) —сила инерции, возникающая за счет смещения опоры.
Таким образом, кинематическое воздействие можно свести к си­
ловому, если загрузить систему силами инерции,
соответствующими смещению системы как жест­
кого целого. Аналогичную операцию можно про­
вести и для экипажа, движущегося по неровности.
На рис. 12.34 показана схема экипажа как одно­
массовой системы. Кинематическое воздействие мо­
жет быть заменено силовым
j}(t) + 2ny(t) + a>0y = - ? ^ .
(12.209)
На рис. 12.35, а изображена схема башни с %щшш%%%
пятью массами. Введем вектор
m
&(t) = A( t) [ l 1 1 1]т.
( 12.210)
Р и с . 12.33
Тогда, аналогично предыдущему, уравнение движения может быть
представлено в виде (12.202)
( 12.211)
M y(t)+Ry(t) = - M A ( t ) ,
а1
S)
g*(ti
щ/
•Ч1
Г
i
га Ш т Ш 'я'Ю -т Ы *)
3f(t) ^yv^ *'--jf
jy 3 (t)
Jj (i) ^ ^ н zjr
1----Vi(t)
т
<^ft^ty^x M^
$*A(vt)
ш т
Рис. 12.34
Ри с.
12.35
где M —матрица масс; R — матрица реакций;
*8 № 2418
y(f) = lyi(t)
y.(0 y*(t) yAt)Y',
M A ( t ) = Wt(t)
J*(t)
J 3(t)
JA t)V 545
вектор сил инердии, соответствующий смещению масс системы каи
жесткого целого.
Выше рассмотрены случаи простейших кинематических воздей­
ствий. На практике может встретиться случай, когда разные точ.ки
упругой системы имеют различные заданные перемещения. Напри­
мер, случай протяженного сооружения при действии сейсмического
воздействия. Здесь первоначально должна быть решена статическая
задача: определение смещений точек, где приложены массы в на­
правлении их движения при произвольном смещении опор, или
точек, для которых задан закон изменения перемещений во времени.
Дальнейшее составление уравнений движения производится ана­
логично описанному.
§ 12.8. СВЕДЕНИЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ ДИНАМИКИ К РАЗДЕЛЯЮЩИМСЯ УРАВНЕНИЯМ
С ПОМОЩЬЮ РЕШЕНИЯ ПРОБЛЕМЫ СОБСТВЕННЫХ
ЗНАЧЕНИЙ
В § 12.5 рассмотрен процесс приведения системы двух диффе­
ренциальных уравнений к разделяющимся уравнениям. При этом
матрица, для, которой решалась проблема собственных значений,
была несимметрична. Эта задача (матрица не симметрична* а соб­
ственные числа действительные) не является типичной для линейHofr алгебры, так как наиболее оптимальные алгоритмы и про­
граммы имеются только для случая, когда матрица симметрична.
В данном параграфе показано, как свести систему дифферен­
циальных уравнений динамики к разделяющимся уравнениям с ис­
пользованием решения проблемы собственных значений для сим­
метричной положительно определенной матрицы.
В предыдущем параграфе приведено общее уравнение динами­
ки — уравнение Лагранжа. Рассмотрим случай свободных колеба­
ний без учета затуханий
MZ(t) + RZ(t) = 0>
(12.212)
Аналогично предыдущему (12.137), решение представим в виде
2i
Z(t) =
sin(to/ +
9e) =
Zsin(© / + q>0).
(12.213)
L_ “ л _J
Подставляя (12.213) в (12.212) и сокращая на sin(<otf + 9o)> получим
( R - a * M ) Z = 0.
(12.214)
Система уравнений (12.214) отличается от (12.139) тем, что у o*=A.
стоит не единичная матрица, а матрица M, которая может быть либо
диагональной (случай сосредоточенных масс), либо ленточной, ана546
Логичной по своей структуре матрице R (случай распределенной
массы). Приведем систему (12.214) к виду (12.139). При этом воз­
можны два варианта, рассмотрим п e p в ы й из них.
Матрица M является положительно определенной, поэтому ее
можно представить в виде произведения двух треугольных мат­
риц (см. § 13.6):
M = W TMW M.
(12.215)
Перейдем в системе (12.214) к новым переменным
(.12.216)
VM— WMZ, откуда Z = Wu^M-
Подставляя (12.216) и (12.215) в (12.214) и умножая результат
на (W-1)T, получим
[(W ^ )TR W u -ffl* ( W j t y W b W MWjt] VM= 0
или
[ { W t i y R W 7 t - X E ] V M= Q,
(12.217)
г д е ^ = с о 2.
Уравнение (12.217) аналогично уравнению (12.13Si), при этом соот­
ветствующая матрица является симметричной. Решим для j(12.217)
полную проблему собственных значений (см. § 13.7), т. e. найДем
Xf
~Vu
Vn
К
A=
••• 0 B f
•
,
♦
•
VM ~
®». :
'•
•
ш
•
•
Л
K _
У и
(12.218)
*•• v nn„
где Л — матрица собственных значений (Х = ю2); VM— нормирован­
ная матрица собственных векторов, причем нормирование произ­
водится так, чтобы длина каждого собственного вектора была
равна единице.
В соответстВии со свойствами собственных векторов (см. § 13.7)
имеем
_
VT
MVM= E,
_
(12.219)
[ ( W ^ y flW rf] VM= VMA.
(12.220)
Рассмотрим общий вид уравнений динамики
M2 (t) + CZ (i) + RZ(t) = P (t).
(12.221)
Рассмотрим случай, когда матрица С является линейной ком­
бинацией матриц M и R:
C = a i M + a 2R.
(12.222)
Произведем замену переменных в уравнении
Z ( t ) ^ W ~ d V MZ M ( t ) .
18*
(12.223)
547
Подставляя (12.223) в (12.221) и умножая на V T
M (W y )T. получим
v h (W r fy m r t f V jJ jH
( 0 + « i У м ( w~My
M W r t v Ml M ( о +
+ а 2Кд1 (Н^д|)т R W м У м ^ м (tf + У^л ( W м)тR W мУ м^ м (tf = ^ (0(12.224)
Подставляя (12.215), (12.219), (12.220) в (12.224), получим систему
разделяющихся уравнений
^ и (0 + а 1^Л1 (0~Ьа 2А^и(^) + Л ^ ( / ) = V^M(№ м)т Р ( 0 ’
(12.225)
^
Обозначим векторы, характеризующие формы колебаний ZM, в силу
(12.216) имеем
VM= WMZM,
(12.226)
ZM= W MVM.
(12.227)
Подставляя (12.226) в (12.219) и используя (12.215), получим
Z TM Z = E.
(12.228)
При использовании в т о р о г о варианта впроизведениидвух
треугольных матриц разлагаем положительно определенную мат­
рицу
Й = В Д .
(12.229)
Дальнейшие выкладки аналогичны предыдущим. В табл. 12.3
приведены основные результаты по обоим вариантам. Обратим
T а б л и ц а
^t
7*
^
MZ (t) + CZ (t)+RZ ity-= P(t);
Первый
Второй в а р и а н т
M = W T
M W M -, V M = W M Z ; Z = W M l V M
= ^
%
=
a?
V h V M = E ; [ ( W t f ) TR W » £ ] V M = V MA
Z M = W M
%M ( O
+
VM'> Z M
r M ZM
* i^ A i (/) +
(R-a*M)Z^Q
вариант
[ { W M Y R W jit- % K E]
=
а 2Л 2 д 1
12.3
+\ZM (t)= V h { W M Y P (t)
[ ( W r ) r W
\-
VR = W R Z ; Z = W R ' V R
f - V
? ] = 0 ;
4
=
^
V lV ft= E - , [ ( V ^ T M W ^ j F * = F * A - i
Z R
E
(t)
R=W JtW R;
=
W J?1 ^ ;
Л -1 2 д +
=
Z\ RZR = E
с ^ Л “ 1Z K
Щ (W kT P
(0
+ a iZ fr+
ZR =
внимание на то, что матрица,
формы, обладает свойствами
г \ т г т = Е,
характеризующая собственные
( i 2. 230)
z \ R z H= E .
В качестве примера рассмотрим систему, изображенную на
рис. 8.5, а; система дифференциальных уравнений для нее имеет
вид (12.204). (Для простоты выкладок не будем учитывать затуха­
ния и примем a = l , т0— 1, £ 7 = 1 ; учет реальной погонной массы
и жесткости можно произвести путем введения соответствующих
множителей.) Итак,
13,6254 1,41111
(12.231)
M
1,4111 1,3619J>
0,4611 0,06671
(12.232)
R = 0,0667 1,8
JРассмотрим п е р в ы й вариант(табл. 12.3).Разложимматрицу
масс в две треугольные матрицы, используя компактную схему
Гаусса (см. § 13.4).
T а б л иц а
12.4
1,4111
1 ,3 6 1 9
1 5 ,0 3 6 5
2 ,7 7 3
1 3 ,6 2 5 4
1,4111
1 5 ,0 3 6 5
0 ,1 0 3 5
1 ,2 1 5 8
1 ,2 1 6 7
1 3 ,6 2 5 4
1,4111
Используя табл. 12.4, получим верхнетреугольную матрицу
„.
1 3 ,6 9 1 3
о
WM= [
0 ,3 8 2 3 1
l,1 0 2 6 j-
Рекомендуем читателю сделать проверку
W h W u = M,
где M —матрица масс [см. (1 2 .2 3 1 )].
Обращая матрицу W n , получим
,,,_ i
Г ° . 2709
0
WM = [
— 0 ,0 9 39 1
0 ,9 0 6 9 J-
Построим матрицу
R
W -'R W _ Г 0 -0 338
t f .M = = W M t f U ^ - ^ o _ o o 4 7
0 ,0 0 4 7 ]
1 ,4 732 J *
где R —матрица реакций [см. (12 .2 3 2 )].
Определим собственные числа и векторы матрицы RMi
I 0 ,0 3 3 8 — X 0,0047
1
[0 ,0 0 4 7
1 ,4 7 3 2 — X J = °»
№— 1,507A, + 0,0498 = 0,
X i = l , 4 7 3 2 , b = 0 ,0 3 3 8 .
549
В данном случае внедиагональные члены малы (0,0047) и поэто­
му в силу ошибок закругления значения X совпали с диагональными
элементами.
Определим собственные векторы матрицы RM:
(0,0338 — 1,4732) vxi + 0,0047yu = 0,
Oi2 = l.
Vn = 0,0033,
0,0047% + (1,4732— 0,0338) у22= 0,
u>i = l.
у22= —0,0033.
Матрица собственных векторов имеет вид
-..
Г0,0033
1 ]
v M= l
1
—0,0033J*
Обратим внимание, что длина каждого из собственных векторов
равна единице. Если бы этого не получилось, было бы необходимо
произвести их нормирование (вычислить длину каждого из векторов
и поделить их координаты на длины).
Построим матрицу перехода
_._.«
Г0,2709 —0,09391 Г0,0033
1 1
W d V M= L о
0,9069J [
1
—0,0033J ^
Г—0,0930
0,2701]
**L °>9069 —o,oo3oJЧитдтелю рекомендуем произвести проверки
VM
T ( W r f y R W - M'V M= AM,
Vh(W rtVM W tiVM =E.
Наконец, приведем матрицы для в т о р о г о варианта (для
усвоения материала рекомендуем читателю произвести выкладки):
_ Г0,6790 0,0982]
иг_1_ Г 1,4727 —0,1081]
R L 0
l,3380j ’
R
L 0
0,7474J"
’
Г 29,5513 —0,6160]
Я1 = 29,5644;
lR L—0,6160
0,6919j ’
Lj = 0,6768;
1'
1
0,6213]
^ _ Г 0,9998 0,0213]
R L— 1,0213
1 J*
VR L—0,0213 0,9998 J *
W b * F o = r 1,4747
1 —0,0159
- ° > 076710,7472J ’
^ ( ^ ) - W R ^ = A ,;
V b ( W n ) ^ R W ^ V ^ = E.
§ 12.9. МЕТОД ПОСТОЯННОГО УСКОРЕНИЯ И ЕГО ИСПОЛЬЗОВАНИЕ
ДЛЯ РЕШЕНИЯ ДИНАМИЧЕСКИХ ЗАДАЧ
Для решения дифференциальных уравнений движения разработаны специальные численные шаговые методы их интегрирования.
К числу таких методов относится и метод постоянного ускорения.
Запишем дифференциальное уравнение движения для момента
550
времени i + Ai
м 1 (t + M) + c l (t + M) + RZ (t + Д/) = P (1 + S t ) . (Г2.233)
При использовании метода постоянного ускорения предполагается,
что на шаге интегрирования At ускорение постоянно
! (< + т)_ Ь ± « ± Ь ,
где т — текущее время ( O ^ x ^ A ^ ) .
Развернем выражение
^
( d
^
) _ b
ИЛИ
+
i f l j j <
-у
o
( 1 2 ;2 3 4 )
^
d ( «^(<+T) ) = Z(t+M)+Z(t) dT>
Интегрируя обе части равенства (12.234), получим
i ( f + T) = Z(<+Af f + z f f l T + Cj
(12.235)
при
т= 0,
2(t + x)= l(t).
(12.236)
Подставляя (12.236) в (12.235), получим
C, = l ( t ) .
(12.237)
Подставляя (12.237) в (12.235), будем иметь
1 (t + т) = 1 (t) + Z (--+ AV ± i (t) -c.
(12.238)
Аналогично, интегрируя (12.238), получим
~
^>
*«
^
*-^
•*
Z ( t + T ) = Z ( t ) + Z ( i ) T + Z(i + A^ +Zi t)x2. .
(12.239)
Используя выражения (12.238) и (12.239), запишем формулы для
скорости и перемещения в конце промежутка Ati
П-^
п-^
~>
~>
*•
»»
Z (f + Afl = Z(Q + Z(/ + A*) + Z ( 0 A?;
—>
(12.240)
—У
Z (t + At) = Z(t) + 2{t) At + Z(t + W + Z ( t i д л
(12.241)
^»«
^•
Запишем выражения для Z ( t + At) и Z ( t + At) через
Z(t+At),
Z(0,
i(0 .
?(0-
551
Из уравнения (12.241) имеем
1 (< + At) = ^ Z ( t + Д О - д ^ Z ( t ) - - - l ( t ) - l ( t ) . (12.242)
Подставляя (12.242) в (12.240), получим
2 (t + ДО = ^ - Z (t + Дt ) - b f Z (t)- 1 (t).
(12.243)
Подставляя (12.242) и (12.243) в уравнение (12.233), получим
уравнение для определения Z ( t + At):
R ^ ( t + At)=^P9>
где
* • = дW M + ^ r C + R ’
<12244)
P ^P (t+ M )+ ^M + ^c )z(t)+
+ (^ -A l+ C )l(0 + A fl(0 -
(12-245)
Шаговый процесс проводится поформулам (12.242), (12.243), (12.244)
и (12.245). В начальный момент при /о= 0 известны перемещения Z0
и Z0 скорости, и из дифференциального уравнения движения, со­
ставленного для момента t<,, определяется ускорение
20= М~1(Р0—с10—RZ0).
552
(12.246)
Используя описанный выше шаговый метод, решим задачу о
свободных колебаниях системы с одной степенью свободы при у 0= 3,
р0—15, Wo=2 (T=ft), ^=я/ю о—0,3. Первоначально назначался шаг
Д /= 1 ,д ал ее он последовательно уменьшался вдвое: Дг=0,5; A t=
—0,25; Д^=0,125. На рис. 12.36 показаны кривые, соответствующие
этим шагам (величина шага указана рядом с кривой). При шаге.
Д^=0,125 кривая совпала с кривой, изображенной на рис. 12.15,
которая соответствует точному решению.
Г л а в a 13
СВЕДЕНИЯ И З В Ы ЧИ С Л И ТЕЛ ЬН О Й М АТЕМ АТИКИ,
И СП О Л ЬЗУ ЕМ Ы Е В СТРО И ТЕЛЬН ОЙ М ЕХ АН ИКЕ
§ 13.1. ОБЩИЕ ЗАМЕЧАНИЯ
Современная строительная механика тесно связана с линейной
алгеброй и операциями над матрицами. Поэтому ниже приведены
основные сведения о матричных операциях. Показана связь и от­
личия матричного исчисления от обычных операций над числами.
Матрицы являются удобным вычислительным аппаратом и их ис­
пользование тесно связано с вычислительными средствами дискрет­
ного действия. Калькулятор является простейшей вычислительной
машиной, он широко доступен, поэтому до составления программ
для ЭВМ рекомендуется освоить матричные операции с использо­
ванием калькулятора.
В строительной механике широко используется аппарат линей­
ных уравнений. В математике для выяснения вопросов о совмест­
ности и единственности используется теория определителей, которая
позволяет оптимально формулировать теоремы. Теория определи­
телей читается в общих курсах математики и на ней останавливаться
не будем. Однако вычисление определителя не проще, чем непосред­
ственное решение системы уравнений, поэтому для процесса вы­
числений аппарат определителей не рационален. Более удобным
является метод Гаусса, который не только отвечает на все постав­
ленные вопросы (совместность и единственность), но, что важно для
инженера, параллельно с ответом на эти вопросы позволяет нахо­
дить решение. Конечно, из приведенных соображений нельзя сде­
лать вывод о том, что теория определителей не нужна (эта теория
играет большую роль в общих курсах математики), однако как
средство вычисления при работе с матрицами большого размера их
применять не следует. Далее широко используется компактная схема
Гаусса, позволяющая решать системы линейных уравнений без
промежуточных записей с использованием калькуляторов х. Кратко
рассматриваются вопросы оптимального решения систем линейных
уравнений с использованием ЭВМ.
Особенностью изложения материала является то, что в данной
главе отсутствуют доказательства. Вместо них приводятся число­
вые примеры, иллюстрирующие то или иное положение. Конкретная
числовая реализация лучше воспринимается инженером, чем аб1 См.: Н арец J1. К . Расчет статически неопределимых систем на малых вычис­
лительных машинах» М.* 1968*
554
страктное доказательство, так как основная задача инженера —
умение решать задачи. При изложении численных методов необхо­
димо приводить как можно больше примеров. Этот путь изучения
вычислительной математики является перспективным, так как
современные вычислительные средства позволяют быстро произво­
дить арифметические операции, а дисплейная техника обеспечивает
наглядность представления результатов.
§ 13.2. МАТРИЦЫ, ИХ ВИДЫ ,
ПРОСТЕЙШИЕ ОПЕРАЦИИ НАД МАТРИЦАМИ
Матрицей называется упорядоченный массив чисел (таблица),
который ( которая) понимается как единое целое. Для обозначения
матриц используются квадратные скобки
' [ 0,05 l o
2°8т] -
<Ш >
Числа, из которых состоит матрица, называются ее элементами.
Если элемент матрицы равен нулю, то на соответствующем месте
ставится нуль, либо оставляется пустое место. Выражение, состоя­
щее из двух чисел, перше из которых обозначает число строк л,
а второе — число столбцов т у объединенных знаком X , называется
порядком матрицы nX m . Например, матрица (13.1) имеет порядок
(2X3), Матрица порядка (l x 1) является обычным числом. В- общем
случае матрица может быть записана в виде
~ац
А
(nxnt)
a 2i
9
~ a ni
& i 2 • * * @ini
a 22 •.. a 2fJt
0
*
9
»
Л
*
a n2
•**
I»
(13.2)
а пт -
Матрицы считаются одинаковыми, если их порядки и элементы,
стоящие на одинаковых местах, равны.
Приведем примеры матриц
ГЗ 51
1
А2
18 6 j ;
л - ( 2? X l у- f L-- ?U] •
(2X2)
(13.3)
А х = [ 3 2 — 11.
л
- Г 3
- 4
° 1
2ХЗ>~15
6 3 j*
(lx 3 )
В выражениях (13.3) под матрицами указан их порядок. Если
матрица имеет один столбец, то она называется вектором и для нее
используется специальное обозначение — стрелка сверху. Если
число строк матрицы равно числу ее столбцов, то матрица назы­
вается квадратной, в противном случае (число строк не равно числу
столбцов) — прямоугольной. Матрица, состоящая из одной строки,
называется матрицей-строкой. В соответствии со сказанным: A i —»
вектор; А 2— квадратная матрица; А 3 — прямоугольная матрица;
A i — матрица-строка.
555
Если элементами матрицы являются матрицы, то такая матрица
называется квазиматрицей, или блочной, матрицей. Например,
fi,,
А
С
(13.4)
где Bti, С12, Д ц — блоки;
n _r^lf ^l2 l
1 1 _ Lb3i ь22Г
ТЛ
Y<k<
12
" 21 Ld21 d22
12
-
И
•
Матрица (13.4) имеет порядок (4x3).
В дальнейшем будут широко использоваться квадратные мат­
рицы. Диагональ квадратной матрицы, проходящая из левого верх­
него угла в правый нижний угол, называется главной диагональю.
Если элементы квадратной матрицы, расположенные симметрично
относительно главной диагонали, равны, то матрица называется
симметричной. Если в матрице отличны от нуля только элементы,
стоящие на главной диагонали, то матрица называется диагональ­
ной. Приведем примеры симметричной В г и диагональной В 2 матриц:
'i
Bi = 2
з
2
3"
4 —6 ;
5
—6
'i
в 2=
—з
(13.5)
2
Если блочная матрица состоит из блоков, стоящих на диаго­
нали, то такая матрица называется квазидиагональной.
Введем понятие верхнетреугольной В 3 и нижнетреугольной В А
матриц:
‘ 1 —5 6 '
' 2
1 3
(13.6)
2 1 ; в ,=
#3 =
3
—8 2 4
Матрицей, транспонированной по отношению к матрице Л,
называется матрица Лт, столбцами которой являются строки мат­
рицы А . Запишем матрицы, транспонированные к матрицам (13.3)j
А\ == [2
"
Al =
3
—4
0
-1 ].
5"
6 9
3
86 1J ‘’
- 3'
г
.^
2
AI = P ,=
—1
M
s 3
(13.7)
Очевидно, что (АТ)Т = А.
При записи векторов в виде столбцов расходуется много места,
поэтому там, где в этом есть необходимость, будем записывать век­
торы в виде строк, используя операцию транспонирования. На­
пример,
a= lai a2 a3 ai аь a<> a7 a8 a9 fli0]T.
(13.8)
556
Для симметричной матрицы
A=A.
Введем простейшие операции над матрицами: умножение на про­
извольное число и сложение матриц. Для того чтобы умножить мат­
рицу на число, необходимо умножить на это число все ее элементы.
Эта операция позволяет выносить за знак матрицы постоянный мно­
житель или, наоборот, вносить его. Складывать можно только такие
матрицы, которые имеют одинаковыйпорядок, при этом элемента­
ми матрицы суммы являются суммы одноименных элементов слагае­
мых матриц. Операции умножения матриц на число и сложения
позволяют ввести операцию вычитания матриц. Для этого необ­
ходимо вторую матрицу умножить на —1 и сложить с первой. Роль
нуля при операциях сложения и вычитания играет матрица, все
элементыкоторойравнынулю.Такимобразом, операции сложения
и вычитания вводятся совершенно естественно. Читателю рекомен­
дуем проделать эти операции над матрицами А (13.1) и А 3 (13.3):
- , - _ Г3^05 - 5 0
]
- _ - _ r _ 2 ,9 5
3
0 ]
л + л 3~ ^ 5
36 5,87j ’ А Лз 1 .-5
24 -0 ,1 3 J *
Как указывалось выше, одностолбцовые матрицы называются
векторами. Операции умножения вектора на число и сложения
совпадают с аналогичными операциями векторного исчисления, где
векторы понимаются как геометрические объекты. Умножение
вектора на число k эквивалентно его удлинению (при k>X) или
укорочению (при k<Z,l) в k раз. Если A<0, то вектор меняет свое
направление на противоположное. Операция сложения соответ­
ствует сложению векторов по правилу параллелограмма.
§ i3 .3 . ПЕРЕМНОЖЕНИЕ МАТРИЦ. ОБРАТНАЯ МАТРИЦА
Прежде чем вводить операцию перемножения матриц, введем
понятие умножения матрицы на вектор, эта операция тесно связана
с матричной записью системы линейных уравнений.
Рассмотрим систему линейных уравнений
# 1 1 *1 “ Ъ # 1 2 *2 “ Ъ # 1 3 *3
^
^14>
#21*Х+#22*2 +#23*3=^24; ’
.(l3.9)
# 3 1 * 1 Н ~ # 3 2 * 2 ~^~ # 3 3 * 3 = = ^ 3 4 *
Запишем систему (13.9), используя введенные вышеоперации
умножения векторов на число и сложение:
" а 12~
~ Я ц “
a 21
a 31_
x t
~ь
а 22
_ fl3 2 _
'« is "
*2 +
а 2з
_ fl3 3 _
Х3 —
'b it'
bit
(13.10)
_^34_
Объединим векторы коэффициентов при неизвестных в матрицу
—^
А , вектор неизвестных — в вектор x, вектор свободных членов —
557
в вектор b:
A ^
яц
a*i
a 3i
<Ч\ « 1 3
«22 «23
«32 «33
X=
*1
Xo
^>
6=
14
24
(13.11)
*34
Из (13.10) следует, что для получения столбца свободныхчленов необходимо столбцы матрицы А умножить последовательно
на x if Xg, хй и сложить, но, очевидно, что эту же операцию можно
проводить и по строкам. Для получения первого элемента столбца
свободных членов необходимо все элементы первой строки мат^>
рицы А умножить на элементы вектора x и сложиты
i<*ii а 12
= «п*1 + « 12*2 + « 13*3 = bi1 4 '
«1з]
(13.12)
Аналогично и для других столбцов:
[«2i
а 22
[а 31
а 32
*i
«2з] *s - a21*i + а22х2 + а23х3 = b24»
Аз.:
"*i
«31^1 “Ь «32^2 4* «33^3--^34*
«33 ]
(13.13)
(13.14)
L*SJ
С точки зрения векторного исчисленияпроизведения (13.12) —
(13.14) есть скалярные произведения (сумма произведений одно­
именных координат) строк матрицы А на вектор неизвестных X .
Объединяя равенства (13.12)—(13.14) в одно, можно записать
AX=b.
(13.15)
Выражение (13.15) есть краткая запись системы линейных
уравнений (13.9) в матричной форме, она компактна (в таком
виде можно записать систему любого порядка) и наглядна.
Действительно, лю.бая система уравнений содержит три типа
массивов:
1) числовой массив коэффициентов при неизвестных (матрица А)\
2) массив неизвестных (вектор X);
3) числовой массив свободных членов (вектор b).
При записи (13.15) все массивы четко разделены.
Рассмотрим два вектора одинаковой размерности
a = [cti а2 а3]т и b = [bi b2 63]т.
Скалярное произведение этих векторов в векторном исчислении
обозначается в виде
ia-b) = Otbi+aJ>i + aJ),.
558
При использовании обозначений матричного исчисления этож е
произведение записывается в виде
^
—
^
ат-Ь=[а% аг а3] Ьг = а Д + a A + « s V
A_
Таким образом,
(13.16)
Для умножения матрицы на матрицу необходимо первую матри­
цу умножить на первьш столбец и результат поставить на место
первого столбца матрицы произведения, далее произвести анало­
гичную операцию со вторым столбцом и т. д. Итак,
_^3i #32_*
^ii^ii 4 “@iJ*2i ^ii&ja4~^i2^2§ #ii^is H- ^ 12^2з Щ^Н* ~Ь #1^ 2 4
s= a%lbii ~f"#22^21 #21^*12 ~Ь ^S2^22 ^2l^l3 ~$~^22^23 ^21^14 “Ъ^22^24
аЗ\Ь\1 4“^32^2£ ^31^l2 4” ^32^22 ^31^13 ~Ь ^32^23 ^31^14 “Г ^32^24
Очевидно, что перемножать можно только такие матрицы, у ко­
торых число етолбцов первой матрицы равно числустрок второй
матрицы; при этом матрица произведения будет иметь число строк,
равное числу строк первой матрицы, и чнсло столбцов, равное числу
столбцов второй матрицы:
4B =C .
(я x m ) (га x A) (n x £)
Таким образом, нахождение произведения матриц сводится
к последовательному вычислению скалярных пронзведеиий строк
первой матрицы на столбцы второш ^
[^/i
^7a ••• ^i«]
;
UJ
^isPij^r^lJ^if^r •••H~^t*rftnj* (13.17)
При выполнении этой операции нерационально использовать, ло­
гарифмическую линейку, так как при этом необходимо выписывать
каждое из произведений для последующего сложения, кроме того,
при вычислении каждого произведения необходимо быть вниматель­
ным при определении положения запятой. Для вычисления произ­
ведения (13.17) необходима память в одну ячейку, в которой накап­
ливается сумма произведений. При вычислении этой суммы можно
использовать калькулятор с одной ячейкой памяти. Эту ячейку
первоначально надо очистить, а далее прибавлять к ней последова559
тельно получаемые произведения, при этом легко учитываются
знаки слагаемых, а за положением запятой следить не требуется,
так как оно устанавливается в калькуляторе автоматически. Про­
цесс накопления позволяет производить перемножение матриц без
промежуточных записей. Приведем пример перемножения матриц
“ 1,382
5,68
4,9
—3
1,7841
— 7,368
4,3711 r 4,371
—3,06
5,8431
1,875 —3,81
—28,1421
x=
46,9106
—28,7778
—6,354 '
—0,187 =*
3,5611
7,3453'
—47,3213 .
—23,0797
Если калькулятор имеет несколько ячеек памяти, число которых
не меньше числа столбцов первой матрицы или строк второй, то в
эти ячейки удобно поместить сначала элементы первой строки пер­
вой матрицы и для получения строки матрицы произведения наби­
рать элементы столбцов второй матрицы, а вместо элементов строки
первой матрицы использовать номера ячеек. Далее поместить эле­
менты второй строки первой матрицы и т. д. Аналогичные операции
можно производить со столбцами второй матрицы и получать столб­
цы матрицы произведения. Если одна из перемножаемых матриц
невысокого порядка, то можно в память калькулятора поместить ее
полностью (обычно усложненные калькуляторы имеют 10 ячеек
памяти и, следовательно, можно поместить квадратную матрицу
3-го порядка).
Основной особенностью матричного исчисления является некоммутативность произведения
АВФВА.
(13.18)
В общем случае для прямоугольных матриц операция B 'A
принципиально невозможна (число столбцов матрицы В может ока­
заться не равным числу строк матрицы А). Но если эта операция и
возможна, то равенства матриц не получается. Равенство соблю­
дается в частных случаях, например, когда матрицы А и В диагональны и одинакового порядка. Имеются и другие случаи, когда
матрицы являются коммутативными, они будут приведены далее.
Обратим внимание на то, что произведение двух симметричных мат­
риц не является матрицей симметричной. Действительно,
(13.19)
Выпишем ряд формул
(А В )С = А(ВС )\
( A B C y = С ТВ ТА Т.
560
(13.20)
(13.21)
Рекомендуем читателю проверить формулы (13.18), (13.2G), (13.21)
на примере матриц 2 -го порядка
Чз ^ *-G _j* Ч? •].
Для квадратных матриц можно ввести понятие единичной мат­
рицы, которую будем обозначать буквой E :
AE=EA = A
или
*]
'1
"1
13
«ii «12
«2 i
22
a*i
33
32
~аа <4i
X
оц « 2 2
<hi « 3 2
=
1
23
1
X
1
«13
«23
=
«33_
1
« ii
«12
«13"
«2i
«22
«23
_«3i
«3 2
«33^
Понятие деления чисел можно ввести с помощью обратного числа
где
a a '1= 1.
Аналогично можно ввести понятие обратной матрицы для квад­
ратных матриц
A A -' = A-'A=*E.
(13.22)
Для получения обратной матрицы к матрице второго порядка
необходимо: переставить местами диагональные члены, поменять
знаки у побочных членов (побочными членами называются члены,
находящиеся вне главной диагонали) и полученную матрицу поде­
лить на определитель исходной матрицы:
alt « 1 2
(13.23)
Л ~1= н
Т Aт ГL — a° 2i
П
“ “ IJdet
fln
- t « 2i а2 2 J
Проверим правильность формулы (13.22)
1
Г a2a —a 12 1 Га ц f l i . l _ p
A^A =
аца22— а12а21 [ — a2i
аг1 J ia 2i f^ 22
lJ"L
1
iJ*
В случае матрицы более высокого порядка для нахождения об­
ратной матрицы используется операция решения системы линейных
уравнений. Итак,
А А ~ 1 = Е обозначим А ~ 1 = В, тогда
А В — Е.
(13.24)
Покажем процесс получения обратной матрицы на примере
матрицы 3-го порядка. Развернем выражение (13.24)
«1|
« й
«13
Ьц
^ ia
^ i3
«21
«22
«23
^2l
^2 2
^23
J*3 t
«32
«33_
^32
^33_
J? 3 i
“ 1
=
1
1
561
В соответствии с правилом перемножения матриц
I
“Г
'h tl
# if
# 12
#13
=
#2i
#22
#23
b 31
#31
#32
#33
_b 9 1 _
0
(13.25)
0
Решая систему (13.25), получим первый столбец обратной мат­
рицы. Аналогично используя в качестве свободного члена второй
столбец единичной матрицы, получим второй столбец обратной мат­
рицы и т. д. Вычислим матрицу, обратную верхнетреугольнойз
1 0,5
1
4 —3
(13.26)
2
1
1
Вычислим первый столбец обратной матрицы
1^11 ~| 0,56j;j
= i;
— 0;
1&21 + 1^3l
=
0;
Щ , Ч~ 4й41— 36j^
= 0;
\ba + 26ji
l^Bi + l^ e i- 0 'i
l^ei —0,
откуда
bei = bsi— bii = bsi = b 2i = 0’, bii = 1.
Подставляя в нравую часть второй столбец единичной матрицы
6 -г» порядка, получим второй столбец обратной матрицы и т. д.
'1
—0,5
0,5 — 2
5,5 —5,5”
И
1
— 1
4 — 11
tl
1
—4
— 11
1_
(13.27)
1
— 2
2
1
— 1
1
Обратим внимание на то, что матрица, обратная верхнетреуголь­
ной, является треугольной, но при этом верхний треугольник явля­
ется полностью заполненным.
§ 13.4. МЕТОД ГАУССА ДЛЯ РЕШЕНИЯ СИСТЕМ
ЛИНЕЙНЫ Х УРАВНЕНИЙ. РАЗЛОЖЕНИЕ МАТРИЦЫ
В ПРОИЗВЕДЕНИЕ ТРЕХ МАТРИЦ
Д ля решения систем линейных уравнений удобно использовать
методГаусса. Итак, предположим, что необходимо решить систему
линейных уравнений
#11^1 ~Ь ^12^2 ~Ь ai3^3 ~ ^14>
a21X i + аг2Х 2 + амХ 3 = а24; .
(13.28)
*2;u^i ^1' ^32^2 ~Ь ^33^3 ^^ ^34* J
562
Будем рассматривать три уравнения, но совершенно аналогично
проводятся выкладки и при большем числе уравнений. Поделим
первое уравнение на ац. Далее, с помощью полученного уравнения
исключим Xi из второго и третьего уравнений. Для исключения
X i из второго уравнения умножим преобразованное первое урав­
нение на a2i и вычтем из второго. Аналогично, для исключения X i
из третьего уравнения умножим преобразованное первое на a3t и
вычтем из третьего:
flfg x.=>
ац 3
£ii
#u
#12
#u
24 a 21 «и
#13
#u
«31 ~ j ^2 + («33-- « 31#11 X* = O b t - a 31#n
# 12
* i+
#и
а'22
a 32
(13.29)
Введем обозначения
«12 = ац 9
a13
#i3
#n
.
#14
#11
Перепишем систему (13.29), обозначив коэффициенты исвободные
члены двух еепоследних уравнений буквами b:
X i + «12 ^ 2 ~Ь а и Х %= аи \ Л
^22^2 "Ь ^23^3 ” ^24» |
(13.30)
^32^2 H~^33^3 “ ^34* J
Далее, с помощью второго уравнения исключим неизвестное X$
из третьего уравнения. Поделив последнее уравнение на коэффи­
циент при X s и вводя обозначения, аналогичные (13.30), получим
^1 + «12^2 ~Ь « Л “ «14*» )
* З + ^ гЗ ^ З ” ^ ; [
(13.31)
* 3 " ^34* J
Приведенные выше выкладки называются прямымходом поГауссу.
Пропесс решения системы (13.31) носит название обратногохода
no Гауссу. Итак,
*■ = <&;
Х% = 6-4 &23^34*
Xi = flfj4 ^1г(&24
)
[
^23^34) ~* «13^34* j
(13.32)
Описанный метод решения системы линейных уравнений носит
название метода Гаусса. Рассмотрим его видоизменение, носящее
название метода Гаусса— Жордана. Процесс получениясистемы
(13.30) остается прежним. Перепишем систему (13.30) в обозначе­
ниях, удобных для пояснения процесса решения системы уравнений
563
по Гауссу — Жордану:
(13.33)
где Ьг1*=а1„ Ь1я = а[з, Ьи = а'и . Наследующемшагевоспользуемся
вторым уравнением и исключим Х 2 не только из третьего, но и
из первого уравнения
(13.34)
Вводя новые обозначения, перепишем систему (13.34) в виде
Исключим неизвестное Х 3 из первого и второго уравнений
(13.35)
с34
Сзз
Элемент, на который производится деление, в описанных выше про­
цессах называется ведущим. В предыдущих примерах в качестве
ведущего использовался элемент, стоящий на диагонали. При этом
шло последовательное исключение неизвестных. Этот процесс не
всегда возможен, так как ведущий элемент, стоящий на диагонали,
может оказаться равным нулю. В этом случае используется процесс
исключения по Гауссу с выбором главного элемента. Его идея со­
стоит в том, что в качестве ведущего выбирается наибольший по
модулю элемент из всей матрицы. При этом обеспечивается наиболее
высокая точность решения. Но этот процесс осложняет алгоритм,
так как требуется перестановка строк и столбцов. Можно несколько
упростить этот процесс, если выбирать наибольший по модулю
элемент из строк или столбцов, при этом необходима соответственно
либо перестановка строк, либо — столбцов. Обратим внимание на
то, что при перестановке строк нумерация неизвестных остается
той же, а при перестановке столбцов изменяется.
Рассмотрим случай, когда все ведущие элементы, стоящие на
диагонали, отличны от нуля. Рассмотрим компактную схему метода
Гаусса. Рассмотрим вариант метода Гаусса, несколько отличный от
приведенного выше. В качестве примера рассмотрим систему четы*3 =
Б64
pex уравнений
« 1 1 ^ 1 “ Ь « 1 2 *^2 ~Ь « 1 3 ^ 3 ~Ь « 1 4 ^ 4 “
«15»
«21^1 “Ь «22^2 ~Ь «23^3Ч~ «24^4 ^ 5«25 »
«
. Л
“Ь « 3 2 ^2 “Ь « 3 3 ^ 3 “Ь «3 4 ^ 4 =
(13.36)
«35 >
«41^1 + «42^2 + «43^3 + «44^4==«45* J
Определим Х х из первого уравнения системы (13.36)
X ± * = ------ ( ---- « 1 2 ^ 2
« 1 4 ^ 4 ~^~ « 15 )*
«Х З^З
«11
Далее подставим это значение во 2, 3 и 4-е уравнения систе­
мы (13.36)
*11*1 + «12^2 + «13^3 + «14^4 —« 15
«21 ал \ х .
«21
«21
а 22
« 1 2 ^ ^ 2 “Ь ^ «23
ап “« у - з +
«и
«и
«21
а 15»
Х л= а
«11
« 11
Q3i
«11
а32
«зх
«И
«12
J^
«31 а
«1i 14
«4 1
«11
а42
+ ( «р44
«31
2
Ч~ ( « 3 3
«и
а 13
«ai
35
«11
ап
«41
«11
«и
*3
+
(13.37)
а 15>
а 13 *з +
«41
«41
«11
«11
а1 5 “
Отчеркнем первую строку горизонтальной чертой, а в первый
столбец (который освободился за счет исключения Х± из 2 , 3 и 4-го
уравнений) вписываем последовательно первые коэффициенты 2 ,
3 и 4-го уравнений, поделенные на ац.Д алее отчеркнемэтотстолбец
вертикальной чертой. Назовем систему, полученную после исклю­
чения (в которую входят Х 2, Х 5, X ^ , новой. Сформулируем правило
получения коэффициентов этой системы. Для получения коэффи­
циентов новой системы надо из старых значений вычесть произве­
дения коэффициентов, расположенных в отчеркнутых строке и
столбце, соответствующих искомому коэффициенту. Обозначим
коэффициенты и свободные члены новой системы буквами b
^22^2 ~Ь ^23^3 ~Ь ^24^4 = ^25 > \
^32^2"H^33^3"b^34^4^^35i /
(13.38)
^42^2+ ^43^3+ ^44^4=^45* J
Очевидно, что X$ может быть исключено из последних двух
уравнений системы (13.38) по приведенному выше правилу
Ь22Х 21
+ ^23^
25
32
^32
b 32
^4
=
Ьк
'33
34
Ь22 '25* •(13.39)
^22
*22 24
^42
Ьы_ь
Ь
23
'4З
44
h0 22 24 Х* = Ь1Ъ —
Ь22
'2 2
Ьы °25- '
565
Обозначим коэффициенты и свободные члены новой системы бук­
вами с
^33^3 "Ь ^34^4 — ^35* X
(13.40)
^4 3 ^
3 “Ь
^U ^
4 “
^4fr*
'
Используя то же правило, получим
C 3 3 *
3 l
~ ^~ ~ ^
3
4
^
4
'3 5
=
(13.41)
•1
)
^33
с 33
^33
Обозначим коэффициенты и свободные члены новой системы, ссь
стоящей из одного уравнения, буквой d
с 43
С43
‘44
с 43
"34/ Х л = с.45
й4Л
'3 5
= ^*
(13.42)
Собирая первые строки уравнений (13.37), (13.38), (13.40) и (13.42),
получим
#11^1 4" #12^2 “Ь #13^3 “Ь#14^4 = #15»
^ 2 2 ^ 2 ^ ^ 2 3 ^ S "b ^ 2 4 ^ 4 ^ ^ 2 5 t
v
с , Л + с3* Х .= ся ; Г
/Ю
(
лО\
)
^ 4 4 ^ 4 ===~ ^4 5 *
Таким образом, проделан прямой ход поГаусеу. Проводя обратный
ход, можно определить значения неизвестных Х 4, X s, Х г> X i .
При использовании описанного выше очевидного процесса
приходится многократно переписывать систему уравнений. Пока­
жем, как избежать эту операцию^ обобщая приведенное выше правило получения коэффициентов ногой системы. Д ля пояенения обоб*
щенного' правила соберем коэффициенты* всех приведенных выше
преобразованных систем в табл^ 13.1.
Т аблица
а 12
аН
g2l
а ц
X
Ь г%
G i$
'Г
b 2$
аы
а 15
t>2i
^29
Си
^33
d u
^43
13Л
■i
£ з г
& за
а ц
Ь 22
^4 i
^42
g 43
а и
^22
^3 3
^3 3
I
I
Рассмотрим, например, получение коэффициента c3i [см. системы
(13.39) и (13.40)]:
C34 = *>34-4^fc24С другой стороны [см. системы (13.37) и (13.38)],
(13.44)
Подставляя (13.45) в (13.44), получим
С34 — й34
^i-fli4
«11
иr 2~2 ^ 2i>
(13.46)
'
*
Элементы верхнетреугольной матрицы, получающиеся после пря­
мого хода по Гауссу, отчеркнуты втабл. 13.1 ступенчатой линией.
Для вычисления коэффициентов второй ялоследующих строк мо­
гут быть использованы выражения, аналогичные (13.46).
При вычислении коэффициентов верхнетреугольной матрицы
используются элементы строки, в которой находятся отыскиваемые
коэффициенты, стоящие слева от ступенчатой линии, и элементы
столбца, расположенные выше отыскиваемого коэффициента. Итак,
сформулируем обобщенное правило: для получения коэффициентов
верхнетреугольной матрицы необходимо из старого значения вы­
честь произведение строки, соответствующей отыскиваемому ко­
эффициенту, расположенной слева от ступенчатой линии (см.
табл. 13.1), на столбец, стоящий выте отыскиваемого коэффщиента.
При вычислении этого произведения на калькуляторе, аналогично
операции перемножения матриц, может быть использован процесс
накопления, который освобождает от промежуточных записей.
Определитель треугольной матрицы равен произведению диагональ­
ных элементов
det A = a lxb22czzdn.
(13.47)
Для пояснения процесса решения системы уравнений и вычисления
определителя приведем пример. Пусть необходимо решить систему
уравнений
[ X , + 2 X , + З * з + 4X, = 30:
* i + 4Х2+
* 3 + 2Xi = 20,
3X, + 7 X ,+ 12*3 + 10X, = 93; f
<13' 48)
2 X x + AX2+ \ 0 X s + 2 Х 4= 48.
Все вычисления будем провОдить в табличной форме (табл. 13.2).
T а б л и ц а 13.2
Номера
уравнений
1
1
2
3
4
1
1
3
2
1
Правая
часть
3
4
2
4
7
4
3
1
12
10
4
2
10
2
30
20
93
48
40
28
125
66
1
2
3
30
40
I
2
1
2
—2
— 10
— 12
2
3
3
0,5
4
—2
—1
8
11
3
4
2
0
—20
—25
4
2
Jh
*
*
1i
- 5
2
x
567
Запишем сначала коэффициенты исходной системы* затем пре­
образованной. Для контроля введена колонка контрольной суммы
2 * В эту колонку первоначально записываются суммы элементов
исходных строк и дальнейшее преобразование этой колонки про­
изводится по обобщенному правилу. Далее сумма элементов, стоя­
щих справа от ступенчатой линии, должна равняться элементу,
стоящему в колонке 2 . В колонке X приведены результаты обрат­
ного хода.
Перемножая диагональные элементы (см. табл. 13.2), вычислим
определитель матрицы системы уравнений (13.48)
det Л = 1-2«4-(—5 )= —40.
В строительной механике часто встречаются системы линейных
уравнений с симметричной матрицей А . В этом случае a ^ - a ^ .
Из выражений (13.37) — (13.40) следует, что симметричной будет
не только матрица коэффициентов исходной системы, но и матрицы
всех новых систем, полученных из исходной путем исключения не­
известных. В этом случае по обобщенному правилу необходимо отыс­
кивать только элементы, стоящие в строке. Элементы столбца полу­
чаются путем деления элементов строки на диагональный элемент.
Приведем пример (табл. 13.3).
T а бли ц а
13.3
Номера
уравнений
1
2
з
4
Правая
часть
2
1
2
3
4
2
4
4
8
4
10
10
20
4
10
12
24
8
20
24
52
28
66
72
148
46
110
122
252
1
2
8
4
46
4
2
4
10
6
18
3
2
2
4
2
2
28
2
4
2
12
1
4
4
2
4
4
8
1
1
2
x
В предыдущем параграфе показано, что для получения обратной
матрицы л-го порядка необходимо n раз решить систему линейных
уравнений, причем в качестве грузовых столбцов использовать
столбцы единичной матрицы. Для получения обратной матрицы
можно процесс исключения производить одновременно для всех
грузовых столбцов (табл. 13.4).
Рассмотрим характерные особенности метода Гаусса на прос­
том примере. В табл. 13.5 приведены результаты прямого и об­
ратного хода для симметричной матрицы.
568
r
к
T а б л и ц а 13.4
Исходная матрица
2
4
6
4
6
10
6
10
12
1
2
2
3
4
2
6
—2
1
2
1
—
Чi ^
1
—
—
13
21
29
1
1
—1
Обратная матрица
2
Свободиый член
13
^5
—5
1
- 7/4
Зи
1к
3/4
- 3/4
1и
'
1/4
Ч*.
~ Х/4
Ввиду того что процесс исключения по Гауссу ведется сверху
вниз (см. табл. 13.5), нули, расположенные выше пунктирной ли­
нии, сохраняются. На месте нулей ниже ненулевых элементов могут
появиться элементы, отличные от нуля (сравни верхнюю и нижнюю
половины табл. 13.5). Таким образом, прямой ход по Гауссу сохра­
няет структуру матрицы и его можно проводить на месте исходной
матрицы.
T а б л и ц а
Номера
уравнений
1
2
1
4
2
2
2
4
3
3
4
5
6
.....з ........
Г ........ 3.....
4
4
2
2
0 ,5
3
.......... 'з.......
1
_____ j___ jГ
5
6
22
2
14
........ 2 * " "
3
19
5
6
4
1
— 8
—8
4
12
11
4
18
3
4
2
6
1
3
6
5
4
з
13.5
^3
Ji
“
...........з .......
9
—3
2
4
6
........
2
2
______
2 j\ ~
!
1
.........
1
4
1
Если элементы матрицы группируются около диагонали, то та­
кая матрица называется ленточной. Под шириной ленты понимается
максимальное число элементов в строке от диагонального до наибо­
лее удаленного элемента, отличного от нуля. Так для матрицы, при­
веденной в табл. 13.5, ширина ленты k=4. Процесс исключения по
Гауссу можно проводить в пределах ширины ленты. Программа при
этом получается универсальной, так как, задавая ширину ленты,
569
равной порядку матрицы, можно решать системы с полностью за­
полненными матрицами.
При решении динамических задач шаговым методом, а также
статических в нелинейной постановке часто возникает проблема
решения системы уравнений с различными правыми частями. При
этом правая часть зависит от результатов счета на предыдущем шаге.
На первый взгляд наиболее естественным является использование
обратной матрицы
(13.49)
A X = b, X = A-' b,
однако при больших порядках матриц этот процесс не является
оптимальным.
Если матрица системы уравнений имеёт ленточную структуру, то
обратная к ней полностью заполнена и ее хранение требует боль­
шого объема памяти. Поэтрму используется другой прием. Можно
показать, что процесс прямого хода по Гауссу есть разложение мат­
рицы в две треугольные. Верхнетреугольной матрицей является
матрица, полученная после прямого хода по Гауссу, нижнетре­
угольной — транспортированная к ней матрица, поделенная на
диагональные элементы. Запишем это разложение для матрицы,
приведенной в табл. 13.5:
Г4
2
0
0
0
_0
*
~1
0 ,5
0
0
0
_0
0
1
1
0
1
0
0
0
1
4
— 3
0
0
0
0
1
2
0
2
4
3
0
3
0
3
4
4
0
0
0
0
0
4
18
— 8'
0
Г4
0~
0
0
0
0
0 X 0
0
0
1_
0
0
0
0
0
1
1
0
3
0
— 8
22
2
2
3
0
0
0
0
0“
0
0
—'
0
2
3_
0
3
1
0
0
0
0
0
0
4
2
0
0
.3
-- 3
4
2
0
0"
0
0
■
0.
2
1_
(1 3 .5 0 )
Вторую матрицу произведения (13.50) можно представить в виде
4
0
0
0
0
2
3
0
0
0
0
0
0
3
1
0
0
0
0
0
3
— 3
4
2
0
0
4
2
0
0
Г1
X
0
0
0
0
0
570
0 ,5
1
0
0
0
0
Г4
0"
0
0
0
0
—
0
0
0
2
10
0I
1
1
0
0
0
0
0
4
1
0
0
0
3
0
0
0
0
0
1
•- 3
2
1
0
0
0
1
0
0
0
0
0
0
2
0
0
0
0
0
0
2
0
0"
0
0
0 X
0
1
0~1
0
0
0
1
1
»
аз.5 1 )
Такимобразом, симметричная матрица, приведенная в табл. 13.5,
может быть представлена в виде
A = L TDL.
(13.52)
Можно доказать, что разложение (13.52) справедливодошлюбой симметричной матрицы с отличными от нуля, ведущими эле­
ментами, стоящими на главной диагонали. Обратим внимание на
то, что структура матрицы L совпадает со структурой хранимой
части исходной матрицы А. В памяти ЭВМ на месте исходной
матрицы можно хранить матрицу L, а на главную диагональ
вместо единиц можно поставить элементы диагональной матрицы/>.
Решение системы можно представить в виде
X = L -* D -1 (L-*yb.
(13.53)
При решении системы уравнений (13.53) произведение^"1/? " 1^ ' 1)1
не развертывается, а идет последовательное решение систем урав­
нений без использования обратных матриц, т. e.
2= = (L "1)7^
F = Z>-*Z; X = X - * r .
(13.54)
Первоначально решается первая система уравнений* и опреде^
ляется Z y далее все элементы делятся на диагональные элементы
матрнцы D (решается вторая система уравнений), получается
—
^
ч>
вектор Y и, наконец, находится вектор X . Использование обрат­
ной матрицы к матрице L является не рациональным, так как
обратная матрица к ленточной треугольной матрице является
полностькхзаполненной [сравни (13.26) и (13:27)J.
Обратим внимание на то, чтоспомощьюиспользованнойвыше
таблицы можно исключить из системы уравненийлюбоенеизвеехное по Гауссу—Жордану.
Таблица
Номера
уравнений
xt
X,
X*
*4
1
2
3
4
2
4
6
8
6
4
2
2
1
2
— 16
^ S
3
6
4
21 I ~2 Ч
~
13.6
s
t
6
2
8
6
8
4
6
2
64
34
58
38
86
48
80
56
3
2
— 18
— 14
— 10
^
— 110
— 82
— 154
— 112
2
8
6
58
80
.
- 2° 1
I~24
571
В табл. 13.6 приведено исключение по Гауссу — Жордану Х 2 из
1, 2 и 4-го уравнений с помощью 3-го уравнения.
Во всех предыдущих случаях в качестве ведущего элемента ис­
пользовался диагональный элемент. Рассмотрим случай, когда ве­
дущий диагональный элемент равен нулю и необходимо использоватьметодГауссасвыборомглавногоэлемента. Рассмотрим систему
линейных уравнений, приведенных в табл. 13.7.
T а б л и д а
13.7
Номера
уравнений
*i
х2
x>
*4
-^
ь
2
1
2
3
4
0
1
4
2
8
0
0
4
0
2
1
2
9
26
18
30
85
36
23
40
112
3
4
12
Первый ведущий элемент в системе, приведеиной в табл. 13.7, равен
нулю и на него делить нельзя, поэтому необходимо произвести либо
перестановку строк, либо перестановку столбцов. При перестановке
столбцов будут изменяться номера неизвестных, а при перестановке
строк неизвестные останутся прежними, поэтому лучше произвести
перестановку строк. Правда, в симметричных системах при этом
нарушается симметрия. Д ля сохранения симметрии необходимо
менять местами и строки и столбцы. Чем больше ведущий элемент,
тем точнее решение, поэтому на место первой строки естественно
поставить строку с наибольшим первым элементом.
В табл. 13.8 приведено исключение X i из 2-го и 4-го уравнений,
из 1-го уравнения исключение X i не требуется, так как X i в 1-е
уравнение не входит.
T а б л и ц а
Номера
уравнений
*i
Х2
*,
*4
^
ь
13.8
2
3
2
1
4
4
1
0
2
0
0
8
4
4
3
0
12
2
1
2
9
30
18
26
85
40
23
33
112
3
2
1
4
4
0,25
0
0,5
0
0
8
4
4
2
0
10
2
30
40
0,5
2
8
10,5
26
70
13
36
92
Опять ведущий элемент равен нулю, вновь произведем переста­
новку строк с выбором наибольшего ведущего элемента(табл. 13.9).
При этом первая строка остается без изменений и ее переписы­
вать не будем.
572
T аблица
Номера
уравнений
Х2
13.9
*3
*<
t
2
2
0 ,5
8
26
1 0 ,5
70
36
13
92
1
2
4
8
0
4
0
2
10
1
8
0
2
26
36
2
0
2
0 ,5
1 0 ,5
13
4
0 ,5
5 I|
4 ,5
4 ,5
9
I
Таким образом, матрица приведена к верхнетреугольному виду.
Проведем обратный ход по Гауссу
4Х± 4~ 0*2 4“ 4Xз 4" 2 X 4 s= 30;
^
8Х2+ 0Х 3+ 2 * 4 = 26;
I
2Х3+ 0,5Х4 = 10,5; Г
(13-55)
4,5X , = 4,5. J
Отсюда
* 4= 1 ; * з = 5; X 2= 3; X , = 2 .
Ранг матрицы является важнейшим понятием в теории линейных
уравнений. Для определения ранга может быть эффективно исполь­
зован метод Гаусса. Определим ранг матрицы, приведенной в
табл. 13.10, используя компактную схему Гаусса. Выпишем мат­
рицу и проделаем прямой ход по Гауссу.
T а б л и д а
Номера
уравнеиий
х2
Xt
13.10
Хя
Х\
2
1
2
3
1
2
—1
—2
3
1
—3
8
1
о
7
—1
~4
20
0
1
1
—2
—3
0
—4
2
2
!i
14
7
28
3
—1
|
0
0
0
7
—1/7
Наличие нулевой строки после прямого хода по Гауссу говорит
о том, что третья строка матрицы есть линейная комбинация осталь­
ных строк, следовательно, все определители третьего порядка рав­
ны нулю, так как все миноры третьего порядка равны нулю (каждый
из них будет содержать нулевую строку). Определитель второго
порядка равен 7 (произведение ведущих элементов); следовательно,
ранг равен двум.
573
§ 13.5. ИССЛЕДОВАНИЕ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ*
ОДНОРОДНЫЕ УРАВНЕНИЯ. РЕШЕНИЕ n УРАВНЕНИЙ С m
НЕИЗВЕСТНЫМИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ГАУССА
В предыдущем параграфе рассматривались случаи, когда число
уравнений в системе линейных уравнений было равно числу неиз­
вестных и система имела единственное решение. Однако в строитель­
ной механике имеется большое количество задач, в которых число
уравнений n не совпадает с числом неизвестных m или т —п , но
система имеет не единственное решение (одно из уравнений или групп
является линейной комбинацией остальных). Кроме того, суще­
ственным является решение однородных уравнений, в которых
правая часть равна нулю. Процесс решения систем поясним на
конкретных примерах, при этом будем широко использовать ком­
пактную схему Гаусса, описанную в предыдущем параграфе. Все
пояснения будем вести на системах невысокого порядка, при этом
распространение на системы высокого порядка является достаточно
очевидным.
Пример 1.
Р е ш и м си ст ем у линейных уравнений с д ву м я ст ол б ц ам и п р а в ы х
частей (табл. 13.11). В п е рв о м сл у ч ае си ст ем а я в л я е т ся од н ород н ой .
T абл и ц а
Номера
уравнений
1
2
3
4
~
п
2
3
4
х2
*i
1
Х3
**
4
8
4
4
3
4
8
9
4
4
9
10
0
0
0
0
24
34
44,5
49
2
2
1,5
2
4
0
—2
—4
3
4
—4
3
2
0
0
0
0
24
—2
3,5
3
2
Свободные члены
___________ ___________ |
2
4
3
4
—
14
8,5
1
13.11
_
37
54
68,5
76
37
—20
13
2
Ведущ ий элемент р а в е н н у л ю . П р о и з в е д е м п е р е ст а н о в к у с т р о к с в ы б ором наи«
б о л ь ш е г о в ед у щ ег о элемента п о п е р в о м у ст ол б ц у (табл. 13.12).
T а б ли ц а
Номера
уравнений
*2
*3
— 4
— 2
0
— 2
4
3
0 ,5
2
0
4
3
2
4
—
3
3 ,5
2
.Свободные члены
2
2
3
4
0
0
0
3
2
0
1
2
2
2
0
8
12
— 2
0
— 6
— 8
- '
574
*4
13.12
—
I
1
8 ,5
—
14
13
— 20
П р ов е д е м обратный х о д п о Г а у с с у
2Xi + 4X2+ 3Xs + 4X4= 0
—4Ха+ ЗХ3+ 2Х4= 0
2^3+ 2Х4= 0
—2Х4= 0
i -e
p e ш e н и e
(о д н о р о д н а я
{13.56)
систем а)
* i= 0 ; Х2—0; Х 3= 0 ; Х4= 0 .
2 -e
p e ш e н и e
(н е о д н о р о д н а я
си ст ем а)
Xi=0,5; Ха=2; Х3=1; Х4=3,
В д ан н ом сл у ч а е о б а р е ш е н и я о к а з а л и с ь единственны ми. П р и и сп о л ь зо в а н и и
т е о р и и линейных уравнений д л я ответа н а этот в о п р о с н е о б х о д и м о вы числ ить о п р е ­
делитель. П р и ч е м п р о ц е с с вы чи сл ен и я оп ред ел ител я с и сп о л ь з о в а н и е м п р о ц е с с а
р а з л о ж е н и я п о с т р о к е или ст ол б ц у я в л я е т ся б ол е е т р у д ое м к и м , чем прям ой х о д п о
Г а у с с у . В д ан н ом сл у ч а е не т о л ь к о п ол учеи ответ о ед и н ст в ен н ост и , н о и , что в а ж ­
н о д л я и н ж е н е р а , найдено эт о ед инственное ре ш е н и е .
П р и м е р 2. Ч и с л о уравнений р а в н о ч и сл у н еи звест н ы х (табл . 13.13).
T а б л иц а
Номера
уравнений
*i
1
1
2
2
2
3
4
3
4
5
6
“ ТЛг г
2
3
4
2
3
4
X,
X*
8
3
6
5
14
2
1
3
0
0
Свободные члены
*4
8
0
0
14
15
0
0
3
7
9
12
4
0
0
0
0
0
3
1
0
0
4
*
I! •—4
—0,5
0i
2
0
13.13
s
2
—2
3
5
2
~6
~3
—4,5
15
26
40
58
15
^4
—5
—4,5
О братны й х о д п о Г а у с с у
2
i* i~ f ~ ^ * 2 ~ f ~ 3 X 3 ^ - 4 X 4 = 0 j 3
1 X 2 + 0 X 3 + 0 X 4 = 0;
~6
—3
i
— 4 Х 3 + 2 Х 4 = 0; 0
0X4= 0; 0
1^
p eш e н и e
,5 .
( о д н о р о д н а я си ст ем а)
j — 5 ,5
Г Х О Г—5,5
X2 U
L*3j
2-е
p eш e н и e
L°°5_
(13.58)
(н е о д н о р о д н а я си ст ем а)
rx *H
*2
L*3_
~ — 5 ,5 ~
=
0
0 ,5
T
Х 4+
1
(13.59)
0_
П о л н о е реш ен и е (13.59) н еод н ород н ой системы (13.57) ск л ад ы в ае т ся из п о л н о г о
р е ш е н и я од нород ной систем ы (13.58) п л ю с ч аст н ое р е ш е н и е н еод н ород н ой (1 3 .5 7 ).
О б р а т и м в н н м ан и е н а т о , что о б а р е ш е н и я (13,58) и (13,59) м н ог озн ач н ы и за в и с я т
о т о д н о г о п а р а м е т р а Х$»
575
3 - e p e ш e н и e (н е о д н о р о д н а я си ст ем а).
С и ст ем а я в л я е т ся несовместной (0=j^— 4 ,5 )
Т а к и м о б р а з о м , вы вод о совм ест н ости или несовм естн ост и системы уравнений
следует с р а з у из системы уравнений п осл е п р е о б р а з о в а н и я п о Г а у с с у .
П ри м ер 3. Ч и с л о уравнений р а в н о ч и сл у н еи звестн ы х (табл. 13.14).
T а б ли ц а
13.14
Номера
уравнений
*i
Х2
*3
*4
1
2
3
4
1
4
2
3
4
20
12
20
2
9
5
8
3
14
8
13
0
0
0
0
4
19
11
18
2
3
1
2
16
69
39
64
I
2
3
4
1
4
2
3
4
4
1
2
2
1
0
0
3
2
0
0
0
0
0
0
4
3
0
0
2
—5
2
6
16
5
2
6
s
Свободные члены
Обратный х о д п о Г а у с с у
lX i + 4*2 + 2Xs +
4Х2+ 1 Х 3+
0Х3+
- - . fr- 0Х3 +
1-e p e ш e н и e
3*4 =
2Х4=
0Х4 =
0Х4 =
p eш eн и e
(13.60)
(о д н о р о д и а я систем а)
[ 2 ] - £ . «
2-е
0; 4;
2
0; 3; —5
0; 0;
2
0; 0;
6. ■
=
Ж
(13.61)
] -
(н е о д н о р о д н а я систем а)
[ £ ] - К *
^ s l E W i . * l
(13.62)
В о б о и х с л у ч а я х р еш ен и е м н о г о зн а ч н о и зав и си т от д в у х п а р а м е т р о в (X $ , Х 4) .
3-е p e ш e н и e (н е о д н о р о д н а я си ст ем а).
С и ст ем а я в л я е т ся несовместной (0 ф 6 ).
П р и м е р 4 . Ч и с л о уравнений б ол ь ш е ч и сл а неизвестны х (табл . 1 3 .15).
Обратный х о д п о Г а у с с у
lX i + 2Xa + 3X3 + 4Х4 = 0;
2^2~ ~ ^^з
^ - 0 Х 4= 0
—10Х3-6 Х 4= 0
1-е р е ш е н и е
-
7;
1;
1;
0;
-13;
— 1;
— 9 Х 4= 0
— 4 ,5 ;
1Х4 = 0;
2Х4 = 0;
0 ,5 ;
1;
6 ,5 ;
- 0 ,5 ;
3.
(о д н о р о д н а я с и ст е м а )
Х4 = Хз = Х2= Х 1= 0.
2-е
p eш eи и e
(н е о д н о р о д н а я систем а)
X , = 0 ,5 ;
576
X s = l;
X 2= 0 , 5 ;
X f= I.
{13.63)
ф
*i
*2
*3
1
2
3
4
2
6
4
2
4
12
8
4
6
20
12
8
10
8
20
2
8
6
16
4
1
2
3
4
2
3
2
1
4
0
0
0
6
2
0
2
10
—22
0
—8
8
—18
0
12
—32
0
~4
—4
X,
*5
13.15
T а б л и ц а
13.16
Свободные
члены
Номера
уравненнй
*4
T аблида
12
14
24
4
1
1
3
4
55
71
111
36
12
—22
0
1
—2
1
~~S
3
55
—94
1
— 19
12 ‘ 0
0
4
0
24
0
8
0
0
0
0
2
В е сь второй стол бец п р е о б р а з о в а н н о й м атриц ы р ав е н н у л ю , п оэт ом у н е о б х о д и м о
п е ре х од и т ь к третьем у ст ол б ц у (табл. 13.17) (н еи зв ест н ое Х 2 не в х од и т в о 2,
3 и 4-е у р а в н е н и я ).
T а б л и ц а 13.17
Номера
уравнений
19
*3
*4
*8
*,
2
— 18
0
—4
— 32
2
3
4
0
2
—22
0
—8
2
2
— 22
— 18
— 32
3
4
0
0
0
0
1
14
14
28
Кй 241 8
0
~4
Свободные члены
2
0
0
0
—22
0
—8
— 2
1
3
—94
0
0
0
— 22
— 2
— 94
0
1
14
5
1
75
1
— 19
577
Ведущий
элемеит
(т абл . 13.18).
равен
нулю ,
п оэт ом у
п р ои зв е д ем
п е р е ст а н о в к у
ст рок
Т а б л и ц а
13.18
В ы п и ш ем п о л у ч е н н у ю си ст ем у уравнений
0;
12;
1;
2 Х 3 — 2 2 Х 4 — 18 Х 5 - 3 2 Х 6 = 0;
— 22;
— 2;
1 4 Х 4 + 1 4 Х 5 + 2 8 Х 6 = 0;
14;
5;
1.
2Xi + 4X2 + 6X3 + 10X4+
8 Х 5+ 1 2 Х 6 =
0Х5 +
0 Х 4+
0Х6 = 0;
0;
(13.64)
И з п осл ед н его у р а в н е н и я систем ы (13.64) следует, что п р и третьем г р у з о в о м ст о л б ­
це систем а н е сов м е ст н а, п оэт ом у о с т а н о в и м ся н а п ол у ч ен и и реш ений п р и п ервы х
д вух г р у зо в ы х ст ол б ц ах . О т б р о с и м четверт ое у р а в н е н и е и п е ре ст ав и м в о ст а в ш и х ­
ся т р е х у р а в н е н и я х систем ы (13.64) неизвестны е т ак и м о б р а з о м , чтобы элементы
матрицы к оэф ф и ц и е н т ов , ст о я щ и е н а главной д и а г о н а л и , были отл ичны от н у л я
12;
2Xi + 6X3+ 1 0 X 4 + 4X2+ 8Х5 + 12Х6- 0
2Х3— 22Х4
— 18Х5— 32Х6 = 0
14Х4
+ 1 4 Х 5 + 28Х6 = 0
—
22 ;
(13.65)
14.
Е сл и не делать п е р е ст а н о в к и и в зя т ь в кач естве н е зав и си м ы х неизвестны х Х4,
т о п ол уч и м д ва у р а в н е н и я с т рем я неизвестны м и, п оэт ом у возь м ем в к а ­
честве н езав и си м ы х н еизвест н ы х Х2, Х5 и Хб; р е ш а я си ст ем у (13.65) от н оси т ел ь н о
этих неизвестн ы х, п ол учим :
1-е р е ш е н и е (о д н о р о д н а я систем а)
X5, Х0,
—2
7
0
_2
221 ГХ 2
-6
Х5
0
_ i
— 2J U ,
(13.66)
2-е p e ш e н и e
(н е о д н о р о д н а я си ст е м а).
В ы пиш ем об щ е е р е ш е н и е
ГХП
Х 3
Lxj
Г -2
=
0
7
- 2
. 0 -1
221 ГХ2П Г1 1
-б\ \ Хь Ы
- 2 J U .J
0
(13.67)
L i.
§ 13.6. КВАДРАТИЧНАЯ ФОРМА. МАТРИЦА КВАДРАТИЧНОЙ ФОРМЫ.
ПРОИЗВОДНАЯ ОТ КВАДРАТИЧНОЙ ФОРМЫ
Квадратичной формой трех переменных называется функция
вида
F(x, у, z) = ax* + by* + cz*^-dxy + exz + fyz.
(13.68)
В выражении (13.68) сумма показателей степеней в каждом из
слагаемых равна двум (квадрату), отсюда и название. Перепи578
шем выражение (13.68),поделив коэффициенты упроизведенйй
переменных пополам, и произведем группировку по x, у , г:
F (xyz) = ах* + by*+ c2 2 + ^ ХУ + 4 ху + T xz + T xz + T ^г ^*
+ t y z = x ( a x + Y y + Y z ) + y ( т х + Ь У + Т г) +
+ z ^ x + ^y+ cz^j.
(13.69)
Выражение (13.69) можно записать в матричной форме
a
F(x, у, z) = [* у г] d/2
ue/2
dl 2
b
f/2
el2
fl2
с
x
У
_2_
или
(13.70)
F (x у z) = uT F и,
где
а
F = d/2
_e/2
d/2
6
f/2
е!2
fl 2
с
X
tt = у
^
—^
,
Матрица F носит название матрицы квадратичной формы.
Обратим внимание на то, что по своему построению матрица F
—
>
симметрична. При и — 0 значение квадратичной формы равно
нулю. Если квадратичная форма положительна при любых зна~*
^
чениях вектора и и равнанулю только при u = 0, то такаяквадратичная форма называется положительно определенной, а ее мат­
рица— положительно определенной матрицей.
Распространим формулу (13.70) на произвольное Число пере­
менных
f 11 f 12 ** •/i i ** •fln
f 21/ 22 • • ' f 2i ■• •f 2n
2i
2
,
F ( z ^ . . . z , . . .zJ = f o z , . . .*... .гп]
L f nlfП2***fnt ***tПП_ _
п_
(13.71)
причем
fv-f/t
или
19*
0<'>
/< «).
~^ -+
F (z±z2. . . 2 , . . . 2 „) s= zTFz.
(13.72)
579
В линейной алгебре доказано, что у положительно определенной
матрицы все ведущие элементы при исключении по Гауссу больше
нуля и не могут быть равными нулю, поэтому система уравнений
с положительно определенной матрицей всегда может быть решена
по Гауссу без выбора главного элемента. Как показано в § 13.4,
матрица с ведущими элементами, отличными от нуля, может быть
представлена в виде произведения трех матриц [см. (13.52)]
(13.73)
A = L*DL.
Как следует из вышесказанного, в случае положительно определен­
ной матрицы все элементы диагональной матрицы D больше нуля.
Представим матрицу D в виде произведения
D= V D V b = ( V W V D ,
(13.74)
где V D — диагональная матрица, элементы которой равны корню
квадратному из элементов матрицы D. (Как указано выше, эле­
менты матрицы D положительны.) В силу диагональности мат­
рицы V~D можно записать V D - ^ O Y ,
Подставляя (13.74) в (13.73), получим
A= ^ S
t ^
^
= W "W '
(13-75)
Таким образом, положительно определенная матрица может
быть представлена в виде произведения двух матриц. Матрица,
приведенная в табл. 13.5, является положительно определенной.
Построим для нее матрицу
W — V~DL =
HП
0,5
1
Г2
Vs
1
V2
V2
'2
1_
Уз
_
Кз
1
l_ L_
4
V2
П
1
1
1 4 —3
1
2
1
V3
—3
2V T
1
lj
(13.76)
V 2 V2
1
Перемножая W^YV^ получим матрицу, приведенную в табл. 13.5.
При решении задач строительной механики необходимо уметь
определять вектор производных от квадратичной формы:
dP
[dF_ dF_
^ L < > Z i ; дгл ;
580
dF_
" ’ • дг( ;
dF 1
•■•■' ^ J -
Получим выражение для i-й координаты вектора. Вычислим
производную от произведения (13.71):
dF_
£dzt = [0
1
о
0] Fz +
'01
0
L o_
+ ( Ai 2x + / 2/Z2 "b • • • + [ i f i i г • • • + /„ ; £ „ ) •
Придавая индексу i значение от 1 до n, получим
dF
~+
~+
^ = Fz + F*z.
дг
Но ввиду симметрии матрицы F
dF
дг
§ 1 3 .7 . С О Б С Т В Е Н Н Ы Е
ПОЛОЖ ИТЕЛЬНО
(13.77)
= 2Fz.
ЧИСЛА
И СОБСТВЕННЫ Е
ОП РЕДЕЛЕННОЙ
ВЕК ТОРЫ
М АТРИЦ Ы
Понятие собственного числа и собственного вектора поясним
на конкретном примере. Рассмотрим положительно определенную
матрицу
Г 1,46
Л = [ — 0,72
-0,721
1,04 j *
(13.78)
Проверим положительную определенность симметричной матрицы (путем преобразования по Гауссу, табл. 13.19).
T а б л и ц а 13.19
Номера
уравненнй
1
2
У
X
—
1,46
0,72
—
0,72
1,04
2
0,74
0,32
^^^^^^^^^^^^^^^^_^^Q
1
2
—0,72
1,46
0,6850
—^0, 4931 j
0,74
0,6849
58)
Таким образом, ведущие элементы матрицы А больше нуля,
следовательно, матрица А положительно определенна.
Возьмем некоторый вектор Zx = [2 1]т и умножим матрицу А
на этот вектор:
2 20
1,46 —0,72 2
(13.79)
AZ
1
■0,72
1,04
—0 ,4 0 j'
,]
—**
После умножения матрицы А на вектор Zx = [2 1]т получается новый
~^
вектор Z2 = [2,20 —0,40]т (на рис. 13.1,апоказаны обавектора).
tf
t
1>т
Ь™
f
*z*
^ _ S
Рис. 13.1
~^Г
Рассмотрим другой вектор V1 = [—1,333 1]т и умножим мат­
рицу А на этот вектор:
1,46
—0,72■— 1,333*
^—2,666'
с% — 1,333'
-=
2
A V t = —0,72
1,04
2
1
1
(13.80)
Векторы V* = [— 1,333 1]т и V2— [—2,666 2]т показаны на
рис. 13.1,a. Таким образом, после умножения матрицы А на
—
У
—
У
вектор Vf получается вектор V2 того же направления, что и
—
^
ч
вектор V l9 но в два раза большей длины. Подобный вектор
является особым вектором и называется собственным вектором
матрицы А. Число, показывающее, во сколько раз удлиняется и
укорачивается собственный вектор, называется собственным чис­
лом или собственным значением. Собственные векторы и собст­
венные значения являются характеристиками матрицы и играют
большую роль в физике ri, в частности, в динамике. Как следует
из предыдущего, собственным вектором матрицы А называется
—
у
вектор V=^0, удовлетворяющий равенству
AV = XV,
(13.81)
r
где к —собственное число; V —собственный вектор, соответству­
ющий собственному числу.
В соответствии с равенством (13.81) собственный вектор опре­
деляется с точностью до множителя. Действительно, если вектор
582
~*
*+
V удовлетворяет равенству (13.81), то вектор kV, где k —про­
извольное число, не равное нулю, также является собственным.
Умножая обе части равенства (13.81) на k, получим
AkV=KkV.
Можно задать множитель k так, чтобы длина вектора была
равна единице. Так, д л я в е к т о р а ^ = ^ —1,333 1]т (13.80) имеем
I У, I = V 1,333? + 12= 1,667,
^
где I V j !—длина вектора.
Разделив вектор V^ на его длину, получим вектор с единич­
ной длиной
F = [—0,8 0,6p.
Действительно,
ll^ll = K 0,82+ 0,62= 1.
—
^
—
^
^
Вернемся к уравнению AV = W: перенесемвектор KV влевую
часть и вынесем его из суммы. Из матрицы можно вычитать
только матрицу, поэтому К умножим на единичную матрицу Е у
при этом равенство (13.81) останется в силе:
( A - K E ) V = 0.
(13.82)
Система (13.82) является системой однородных уравнений. Она
—>■
всегда имеет нулевое решение V =0. Причем, если det(^4—%Е)=Ф0,
—>■
то система имеет одно-единственное решение V =0. Если det(A —
— XE)=0, то строки матрицы А — XE являются линейно зависимыми
и, по крайней мере, одно из уравнений является линейной комбина­
цией остальных, а следовательно, его можно отбросить. В резуль­
тате система (13.82) будет иметь число уравнений меньше числа
неизвестных. В такой системе не существует единственного решения,
но одни неизвестные (зависимые) можно выразить через другие не­
зависимые (см. § 13.5). Задавая произвольные значения независимым
неизвестным, можно получить значения зависимых неизвестных.
Очевидно, таких решений будет сколько угодно, достаточнозадать
новые значения независимым неизвестным (см. § 13.5).
Составим уравнение (13.82) для матрицы А (13.78)
1,46 —0,72
Л '1
—
Л
(13.83)
1,04
1_ V — 0.
_—0,72
Система (13.83) будет иметь решения, отличные от нуля, только
в случае, когда
1,46 — К —0,72
(13.84)
—0,72
1,04 — X = 0.
Раскрывая определитель (13.84), получим
(1,46—Я) (1,04—X)—0,722= 0
583
или
^ - 2 ,5 ^ + l = 0 .
(13.85)
Уравнение (13.85) носит название характеристического уравнения.
Вычислим след матрицы А и ее определитель (следом квадрат­
ной матрицы называется сумма диагональных элементов):
sp Л = 1,46+ 1,04= 2,5;
det Л = 1 ,4 6 -1,04—0,72а= 1 .
Таким образом, множитель у % в уравнении (13.85) равен следу
матрицы с обратным знаком, а свободный член — детерминанту.
Легко показать, что это будет всегда для матриц второго порядка.
Решая квадратное уравнение, получим
^i', 2— 1»25 ± V 1,252— 1 =ss 1 ,2 5 ± 0,75; \
К -2 ,
*i = 0 ,5 .
)
<13' 8 6 »
Таким образом матрица второго порядка имеет два собственных
значения. Вычислим собственные векторы, соответствующие этим
собственным значениям.
Итак, ^i = 2; подставляя %± в уравнение (13.83), получим
(1,46—2) un-— 0,72ul2 = 0;
(13.87)
—0,72ии + (1,04—2)
Первый индекс в v указывает номер собственного вектора, а
второй номер координаты.
Решим систему уравнений (13.87) по Гауссу (табл. 13.20).
T а б л и ц а
Номера
уравненнй
Viz
»«
Свободные
члены
13.20
s
1
2
—0,54
—0,72
—0,72
—0,96
0
0
■—1,26
—1, 68
1
2
—0,54
1,3333
—0,72
0
1,26
0
0,0000
0,0000
Таким образом, определитель матрицы равен нулю, вторая
сторона получилась равной нулю, т. e. второе уравнение отли­
чается от первого только множителем. Отбрасывая второе урав­
нение, получим
—0,54y^
—0,72у12= 0.
Задавая t»12= 1, получим
^ = [— 1,3333
584
1]т.
(13.88)
Аналогично из уравнения [(13.83) определим вектор, соответст­
вующий ^2 = 0,5. Подставляя A^ = 0,5 в первое уравнение и
отбрасывая второе, получим
(1,46 — 0,5) У21— 0,72у22 = 0
или
0 , 9 6 ^ — 0,72^22 = 0.
Задавая y ^ = l , получим uai = 0,75.
Собственный вектор, соответствующий A^ = 0,5, имеет вид
V* = [0,75
1]т.
(13.89)
Собирая векторы (13.88) и (13.89), получим матрицу собст­
венных векторов
у _
[ - 1 ,3 3 3 3
0 ,7 5 j
(1 3 9 0 )
Пронумеруем собственные векторы так, чтобы их длина была
равна 1. Вычислим нормирующие множители:
I V, I = Kl,3333* + l 2= 1,6667;
| | F 2 fl = K 0 , 7 5 ^ + l 2 =
l,2 5 .
Деля координаты собственных векторов на нормирующие мно­
жители, получим
? = [~ 2 ;е
м !
(i3 .9 i)
На рис. 13.1, б изображены собственные векторы. Обратим
внимание на то, что эти векторы составляют между собой угол 90°,
т. e. являются взаимно ортогональными. Вычислим произведение
т т ? _ Г— ° » 8
V V = l
0 ,6
0 ,6 1
Г -0 ,8
0 ,8 J ‘ [
0 ,6
0 ,6 1
0 ,8 J
Г1
[О
01
lJ '
( 1 3 -9 2 )
Запишем квадратичную форму для матрицы А (13.78)
[F(x, y) = Z ' A Z ,
(13.93)
где Z = [x, у]т.
_
Перейдем к новым переменным, используя матрицу V:
Z = V Zi,
(1 3 .9 4 )
где Zi = fXi, y t f .
Подставляя в формулу (1 3 .9 3 ) выражение (1 3 .9 4 ), получим
F(x, y )= Z lV ^ A V Z ,.
(1 3 .9 5 )
Таким образом, матрица квадратичной формы преобразовывается
по формуле
_
_
A i= * V 'A V .
(1 3 .% )
585
Построим матрицу A i
.
Г—°.8 0,61 Г 1,46 —0,721 Г—0,8
A i = [ 0,6 0,8j L—0,72
l,0 4 JL 0,6
Г—0,8 0,6] Г— 1,6 0,31 __ Г2
1
& [ 0,6 0 ,8 jL 1.2 0 ,4 j
[
0 ,5 j*
Развернем квадратичную форму (13.95)
F (x, у) = [ х м ] p'2
,61
'.8j
(13.97)
05
Множители при квадратах переменных в выражении (13.98)
равны собственным числам, причем значение квадратичной формы
(13.98) будет положительно при любых значениях x^ и уи
Напомним ряд теорем из математики без доказательства:
1. Все характеристические числа симметричных матриц дей­
ствительны.
2. Собственные числа положительно определенной матрицы всег­
да положительны.
3. Собственные векторы, соответствующие двум различным соб­
ственным числам, являются взаимно ортогональными [см. выраже­
ние (13.92)].
Построим характеристическое уравнение для матрицы 3-го
порядка
«12
«13
«21
«22
«23
a3i
«32
«33_
~ « ii
A=
аi l
^
kE) =
a2i
«12
«22
(13.99)
13
^
23
= 0.
(13.100)
«33 ^
Раскроем определитель (13.100) по правилу Cappyca
(ац— Ц (а22— Я) (а33— Х) + al2a23a 3i+ a 2la32als— a13 (а22— %) a3i —
-- а21а12 (й33---^ )---Я2за Я2 (а11---^1) = 0- (13. 10 1)
Группируя слагаемые в выражении (13.101), получим
Я3—аХ2+ рХ —7 = 0;
(13.102)
а = sp А = ац + а22 + а 33,
где Р = ЛП + Л22+ Л33—сумма алгебраическихдополненийэлементов alu a22, a33, 7 = d e t^ .
Определим собственные числа и собственные векторы для мат­
рицы
г 2,0512 ■
—0,864 — 1,4016т
(13.103)
A = —0,864
3,08
1,152
— 1,4016
1,152
2,8688_
Для определения 1-го собственного числа и соответствующего
ему вектора используем метод итераций. При использовании метода
итераций задаемся вектором нулевого приближения (в качестве
«3f
«32
}
586
ТаблиЦа
Номер 2,0512 —0, 8640 -1,4016
при­ 0,8640
1,1520
3,0800
ближе­ —
2,8688
1,4016
1, 1520
ния
0 I
1
А,
^
2, 05 12 —0,8640 -1,40I6
—0, 8640 3,0800 1,1520
—1, 40 16 1,1520 2,8688
13.21
*
1
I
3,0800
1
1,1520
0,3740 3,0800
1
—0,8640
2,0512 —0,8640 — 1,4016
1
—0,4212 —0 , 6833 2,0512 —0,2805
2
—1,9636 3,7532
3,3728 —2 ,9485 —3,8471
—0,8742 —-1, 1406 3,3728 —0,5232 1
1
2,6182
0,6976
3,7532
3
—2,9149
4,4052 —4,8705 —5 , 6808
1
— 1,1056 —1,2896 4,4052 —0,6723
4,3356
1
3,8865
0,8964
4,3356
4
4,8139 —5,7549 —6,3748
—3,4994
1
—1, 1955 — 1,3242 4,8139 —0,7456
4,6935
1
4,6659
0,9941
4,6935
5
4,9402 —6,0716 —6,5777
—3,7867
1
-—1,2290 — 1,3315. 4,9402 —0,7776
4,8694
1
5,0489
1,0369 4,8694
6
—3,9124 4,9664
4,9793 —6 , 1832 —6,6372
1
— 1, 2418 —1, 3330 4,9793 —0,7909 1
5,2165
1,0546
7
—3,9646
4,9924 —6,2243 —6,6563
1
— 1,2468 —1,3333 4,9924 —0,7964
4,9783
1
5,2861
1,0618
8
4,9972 —6,2401
— 1,2487
1
—3,9858
—6,6629
— 1,3333 4,9972 —0 , 7985
4,9913
1
5,3143
1,0647 4,9913
9
4,9989 —6,2460
—1,2495
1
—3 , 9942
—6,6651
— 1,3333 4,9989 —0,7994
4,9964
1
5,3256
1,0659 4,9964
10
4,9996 —6,2485
1
— 1,2498
—3,9977
—6,6660
— 1,3333 4,9996 —0,8000
4,9986
1
5,3303
1,0663 4,9986
11
4,9998 —6 , 2494 —6,6664
—3,9995
1
—1,2499 — 1,3333 4,9998 —0,8000
4,9996
1
5,3323
1,0666
4,9996
12
5,0000 —6, 2497 —6,6665
—3,9999
1
— 1,2500 —1,3333 5,0000 —0,8000
5,0000
1
5,3301
1,0666
5,0000
0,4800 —0,6000
0,6000
0,6400
ут
—0,6400
—0,4800
4,9464
4,9783
\
587
которого можно использовать любой вектор, отличный от нуля)
и умножаем матрицу на этот вектор. Далее делим все координаты
на одну из координат (можно делить на любую, но для получения
наибольшей точности желательно делить на наибольшую). В ре­
зультате та координата, на которую производится деление, стано­
вится равной единице. Далее вновь умножаем матрицу на получен­
ный вектор и делим на координату, стоящую на том же месте, и т. д.
до тех пор, пока векторы не совпадут. В результате полученный век­
тор является собственным, а координата, получающаяся после
умножения на месте единицы, равна соответствующему собственно­
му значению.
В табл. 13.21 приведены результаты умножения матрицы на век­
тор и деления на одну из координат. Для удобства расположения
векторы записаны в строки. В левой половине таблицы в качестве
нулевого приближения принят вектор [1 0 0]т, а в правой [0 1, 0]т
и деление в первом случае производится на первую координату,
а во втором — на вторую. В последней строке векторы нормирова­
ны так, чтобы их длина была бы равна единице. Векторы, получен­
ные из обоих нулевых приближений, отличаются только знаками.
Итак,
К=Ь 7i=tO ,48 —0,6 —0,64]т.
Определим коэффициенты характеристического полинома
(13.101) для матрицы (13.103):
a = s p Л =2,0512+3,08+2,8688—8;
р = Л х+ Л 2+ Л 3= 3,08*2,8688—1, 152*+2,0512 x 2,8688—
—(— 1,4016)2+2,0512-3,08—(—0,864)2= 17;
Y=det i4=2,0512-3,08-2,8688+2(—0,864) l,1 5 2 x ( - l ,4 0 1 6 ) (— 1,4016) 23,08—(—0,864) 22,8688—(1, 152)2x 2,0512 = 10.
При вычислении коэффициентов p и у использован процесс накоп­
ления через ячейку памяти; при этом не требуется промежуточных
записей. Итак, характеристический полином имеет вид
№— 8%*+17к— 10=0.
(13 .104)
Один из корней полинома (13Л04) известен ^ = 5 , следователь­
но, полином должен делиться на двучлен (X—5) без остатка:
>w3 — 8>w2+
\7Х —
10
1 3~ 5Х 2
М — Зк + 2
-3>j> + m
- _ 3 * * + 15X
2X — 10
2X — 10
X*_3X + 2 = 0;
k = 4 = t V т - 2 = ! = ^ ;
^s = 2; L ,= 1.
588.
Определим собственные векторы, соответствующие Яа н Я,
(табл. 13.22). Итак, при ^ e 2
T а б л и ц а 13.22
Номера
уравнений
0*t
^S8
V%*
Свободные
члены
£
1
2
3
0,0512
—0,864
— 1,4016
—0,864
1,08
1,152
—1,4016
1,152
0,8688
0
0
0
—2,2144
1,368
0,6192
1
2
0,0512
— 16,875
—27,375
—0,864
—13,5
— 1,4016
—22,5
0
0
0
—2,2144
—36
3
sJP
0
0
Система уравнений будет иметь вид
0 ,0 5 1 2 u ,f— 0 ,8 6 4 у 22 — 1 >4016я23 = 0;
— 13,5t>22 — 22,5у28 = 0.
При vM = 1
v22= — 1,6 6 6 7 , v2l — — 0 ,7 5 0 0 .
^
Вектор V2 имеет вид
V 2 = [— 0 ,7 5
— 1 ,6667
I ] T.
^
Пронормируем вектор V2 так, чтобы его длина была равна еди­
нице:
_
V%*= [—0,36; —0,8; 0,48]т.
При К3= 1
T аблиц а
Номера
уравненнй
Vn
1
2
3
1,0512
—0,864
— 1,4016
1
2
1,0512
—0,8219
— 1,3333
3
V&s
Свободные
члены
—0,864
2,08
1,152
— 1,4016
1,152
1,8688
0
0
0
—1,2144
2,368
—0,864
1,3699
0,0000
— 1,4016
0
— 1,2144
0,0000
0
0
1 ,3 6 9 9
Vu
I
13.23
0,0000
£
1 ,6 1 9 2
0,0000
589
Система уравнений будет иметь вид
1,0512v31— 0,864у32— 1,4016v33
1,3699у32
При v33 = I
Уза = 0. ^31 — 1>3333.
0;
0.
•^
Вектор V3 имеет вид
V>3= [1,3333
0
1]т.
Пронормируем вектор Vs так, чтобы его длина была равна еди­
нице
F 3= [0,8
0
0,6]т.
Окончательно матрица собственных векторов для матрицы (13.103)
имеет вид
_ r o,48 —0,36 0,8n
V = —0,6
—0,8
0
.
(13.105)
—0,64
0,48 0,6J
Проверим ортогональность матрицы (13.105):
V*V =
0,48
-0,36
0,8
—0,6
—0,8
0
—0,64
0,48
0,6
^
0,48
—0,6
L—0,64
—0,36
—0,8
0,48
0,8i
0
0,6
гI
1
1
VTA V =
0,48
■0,36
0,8
0,6
0,8
-0,64i
0,48
0
0,6
■
■
Г 0,48
X —0,6
—0,64
—0,36
- 0 ,8
0,48
2,0512
-0,864
1,4016
0,8л
0
0,6
=
г5
0
0
—0,864
3,08
1,152
0
2
0
-l,4016n
1,152 X
2,8688
°1
0
1
Определим собственные числа и собственные векторы для мат­
рицы
г 3,1568 1,3824 — 1,728т
А=
1,3824 3,9632
1 ,2 9 6 .
(13.106)
— 1,728
1,296
3,38 J
Для определения 1-го собственного значения и собственного
вектора используем метод итерации (табл. 13.24).Обратим внима590
Таблица
Номер
3,1568
при­
1, 3824
ближе­ —1,7280
ния
0
1,3824
3,9632
1,2960
— 1 , 7280
1,2960
3,3800
к
3 , 1568
1,3824
- 1 ,7 2 8 0
1,3824
3,9632
1,2960
1
13.24
-1,7280
1,2960
3,3800
К
1
3,1568
1,3824
—1,7280
1
0,4379
— 0,5474
4,7081
2,4085
—3,0106
1
0,5116
—0,6395
4,9690
2,5811
—3,2264
1
0,5194
—0,6493
4,9969
2,5996
—3,2494
1
0,5202
—0,6503
4,9997
2,6014
—3,2518
1
0,5203
—0,6504
5
2,6016
—3,2520
1
0,5203
—0,6504
0,7684
0,3998
—0,4997
1,3824
3,9632
1,2960
0,3488
1
0,3270
1,9184
4,8692
1, 7985
0,3940
1
0,3694
1,S879
4,9866
1,8636
0,3986
4,9986
0,3737
1,9958
5
1,8710
0,3991
1
0,3742
1,9958
5
1,8711
0,3992
1
0,3742
1,9960
5
1,8711
0,3992
1
0,3742
0,3502
0,8773
0,3283
1
3,1568
3,9632
2
4,7081
4,8692
3
4,9690
4,9866
4
4,9969
4,9986
5
4,9997
5
6
ут
5
5
ние на то, что при различных нулевых приближениях получили
собственные числа одинаковыми, а собственные векторы — раз­
личными.
Обратим внимание на то, что собственные векторы, полученные
в табл. 13.24, удовлетворяют уравнению (13.108). Действительно,
— 1,8432 •0,7684 + 1,3824. 0,3998 + 1,728 •0,4997 = 0;
— 1,8432 -0,3502 + 1,3824 -0,8773 — 1,728 -0,3283 = 0.
591
Характеристический многочлен для матрицы (13.106) имеет вид
Я3 — 1 0 ,5 Х ? + 3 0 Я — 1 2 , 5 = 0 .
(1 3 .1 0 7 )
Деля многочлен (13.107) на двучлен А,— 5, получим:
К2 — 5 , 5 X + 2 , 5 = 0 ;
К , »=
0 , 5 •5 , 5 ±
V ( 0 ,5 - 5 ,5 ) 2— 2 ,5 = 2 ,7 5 ±
2 ,2 5 ;
Я2— 5; Я3— 0,5.
Таким образом, Я* = ^ , этим и объясняется разница в собст­
венных векторах при различных нулевых приближениях (см.
табл. 13.24).
Определим
собственные
векторы,
соответствующие
Хй
(табл. 13.25) и Я3. При Я2— 5
T а б л и ц а
Номера
уравнений
Vti
1
2
3
— 1,8432
1,3824
— 1,728
1
2
3
—1,8432
13.25
Щз
Свободные
члены
2
1,3824
— 1,0368
1,296
—1,728
1,296
—1,62
0
0
0
—2,1888
1,6416
—2,052
1,3824
0
—1,728
0
0
0
—2,1888
0
Щж
.
—0,75
0,9375
0
0
0
0
Система уравнений превращается в одно уравнение
—
1,8432u* + 1,3824а22— 1,728я23= 0.
При а22= 1 , t>23 = 0 будем иметь а21 = 0,75.
При v22= 0, v23 = 1 будем иметь v21 *= — 0,9375.
(13.108)
Собственные векторы
V , = r
к; =
0 ,7 5
I
0 f ; ,
[— 0 ,9 3 7 5
0
1]’ . /
(U .lU 9 )
Векторы (13.109) не являются ортогональными. Построим вектор
V 2 как линейную комбинацию векторов (13.109):
V, = aVt + n
592
Коэффициент а найдем йз условия
VlV2= 0 или aVlVi + VlV'2= 0.
Отсюда
а _._ — ViVi _ — 0,75 (— 0,9375)
KiKi
0,75? + 1
V = 0,45 [0,75
1 0]т + [— 0,9375
0
Q 4g
’ ’
1]т = [— 0,6
0,45
1]*.
(13.110)
Найдем третий собственный вектор при Х3= 0,5 (табл. 13.26).
T а б л и ц а
Номера
уравнеинЙ
Vst
Vzt
1
2
3
2,6568
1,3824
— 1,728
1,3824
3,4632
1,296
1
2
3
2,6568
0,5203
—0,6504
1,3824
2,7439
0,8
13.26
Свободные
члены
2
—1,728
1,296
2,88
0
0
0
2,3U 2
6,1416
2,4480
—1,728
2,1951
j
0,0000
0
0
0
2,3112
4,9391
0,0001
t>33
Система уравнений будет иметь вид
2,6568и31 + 1,3 8 2 4 ^ — 1,728^3
2,7439уз2+ 2 ,1 9 5 ь зз
0;
0.
При vs3 — 1
U32 — — 0,8; и31 = 1,0667.
Окончательно матрица собственных векторов
V
-
0,75
1
0
—0,6
0,45
1
1,0667
l,Ubb/n
^ )o,s
,
j
Пронормируем матрицу собственных векторов так, чтобы длина
каждого из них равнялась единице:
_ rO,6
V=0,8
Lo
—0,48
0,36
0,8
0,64n
—0,48
(13.111)
0,6 J
593
Матрица собственных векторов (13.111) приводит матрицу А к диа­
гональной форме
г 0 ,6
0 ,8
0
3,1568 1,3824
V * A V = l - 0,48
0,36 0,l
1,3824 3,9632
L 0,64 —0,48 0,6J L—-1,728
1,728
1,296
3,38 J
rO ,6 —0,48
0,64 1
-5
X
0,8
0,36 —0,4! ==
5
L0
0,8
0,6
0,5.
$
J
В данном случае при определении собственных чисел и собствен­
ных векторов использовалась теория определителей, так как мат­
рицы не превышали третьего порядка. При работе с матрицами бо­
лее высокого порядка этот подход не является рациональным и для
решения этой проблемы используются специальные методы, изло­
жение которых выходит за рамки настоящего учебника. Читатели,
интересующиеся этим вопросом, могут познакомиться с ними по
книге Д. К. Фадцеева, В. H. Фаддеевой «Вычислительные методы
линейной алгебры» (М., 1960).
§ 1 3 .8 . О Д Н О Р О Д Н Ы Е
ПО
ТРЕУГОЛЬНОЙ
К ООРДИНАТЫ
И
ИНТЕГРИРОВАНИЕ
ОБЛАСТИ
При построении матрицы реакций для произвольного треуголь­
ного элемента удобно использовать две системы координат: глобаль­
ную Xy Y и локальную (рис. 13.2). В качестве локальной системы
используется однородная или пло­
щадная система координат. Поло­
жение точки, находящейся внутри
треугольника (например, точки p
на рис. 13.2), определяется в этом
случае тремя координатами: L i=
= F x/F; L 2= F 2/F; L 3= F 3/F, где
F i, F 2,— F 3— площадитреугольников; F — общая площадь треуголь­
ника. Между однородными коор­
динатами существует очевидное со­
Р ис.
отношение F = -F i+ F a+ F g . Одно­
родные координаты не зависят от
положения треугольника в глобальных осях. Угловые точки имеют
следующие координаты:
точка 1 I i = 1, L 2= 0, L 3 = 0;
точка 2 L x= 0, L 2 1, L% 0,
точка 3 L i = 0, L 2 0, L 3 1.
Для точек, расположенных посередине сторон:
точка 4 L i = 0,5, L 2= 0,5, L 3= 0;
точка 5 L i—0, L 2= 0,5, L 3—0,5;
точка 6 L i = 0 Д L i = 0, L 3 = 0,5.
594
Построим формулы перехода от глобальной системы координат
X , Y к локальной L u L 2, L 3. Из аналитической геометрии известно
*i
" i
X<i
i
xa
X
. i
r i
F
Г1 =— —
0
i
x%
i
X3
У1
У2
* f г/ 1-
J_
f>~ 2
»
*
У
х3
у 3_
У з ~.
(1 3 .1 1 2 )
У
•
У2 >
Уз.
Xi
J_
2
^3 =
у±
г/2
*/ J
1
Площади, вычисленные по формулам (13.112), будут положи­
тельными, если обход вершин в порядке возрастания происходит
против хода часовой стрелки. Раскрывая определитель Fi по первой
строке, получим
X
L - J 1
2F
X2
У
У2
X3
y ^
1
x.
~ 2F
X,
Уг
Уз
у2
1 xs
Уз
1 X.
— 2f (^ 1 + Угзх + *32y ) '
Аналогично,
^
= i p ( А г + r 3i * + Х 1ЯУ); L 3 - ^ _ (л 3 + Y i t X + X 2lY ) ,
2F
где
A i = * X , Y , - Y , X ,; 4 = X 3^ - F 3^ ; ^ = В Д - Г Д , ;
Yii = Y i - Y j ' , Xi, = X i X j .
Запишем выражения для L it L 2, L 3 в матричной форме
V '
L2
M
1
~~ 2F
_
А
^2
^3
Равенство (13.113) позволяет
координат к локальной. Д ля
зуется формула
"1
n i
*i
"i
J U ' Jfi
У 23
V
^32
i/з! ^13
(13.113)
X
JJ-
переходить от глобальной системы
обратного преобразования исполь­
I
1 1 'V
*2 *3 L2
y* y*~ U . j
~
J
(13.114)
Запишем выражения для производных по X и Y от функции одно­
родных координат
df
df d L i
a^ “ dLx dx +
df dL2
d l 2 dx +
df dL3
dL3 dx
y 23
2F
df
dLx ^
y 3i
2F
df
dL2 ^
y i2
2F
df
dL3 9
(13.115)
595
r
Аналогично,
Ж.
ду
X 3t df . Х и df
2F
dLt
'
2F
дЦ
X 21 df
'
2F dL
(13.116)
При интегрировании функций однородных координат удобно
использовать формулу
('! /! Л!
2F,
J Ц Ц Ц dF
(13.117)
(f+ / + ^ + 2)!
которая позволяет весьма компактно интегрировать по треуголь­
ной области. Однородная система координат облегчает процесс
построения матриц реакций для треугольника.
При вычислении интегралов по треугольной области удобно
использовать численное интегрирование. Если подынтегральные
функции являются полиномами, то при соответствующем числе то­
чек результаты численного интегрирования совпадут с точным.
Поясним процесс интегрирования на примере интегрирования
функций 1, ** у , x2, xy, у \ х \ х2у у ху2у у*.
Разобьем каждую сторону треугольника, по которому надо вы­
числять интегралы, на три равные части (рис. 13.3, а). При этом
на каждой стороне треугольника образуются четыре узловые точки,
через которые можно провести полином третьей степени. Соединив
точки деления, как показано на рис. 13.3, а, разделим исходньщ
треугольник на девять равновеликих треугольников. На рис. 13,3, б,
в, г показаны единичные полиномы, соответствующие точкам 1,
4, 10.
Построим полином, соответствующий точке Ji
и = k,L , (L, - */а) (Ьг - 2/з).
( 13.118)
Рис. 13.3
596
Этот полином будет принимать нулевые значения по линиям 2—3,
5—8, 4—9. В точке 1 полином (13.118) должен принимать значе­
ние, равное единице:
1 = f c i - l ( l - 7 s ) ( l - V s ) , откуда ki = */s.
Окончательно
U = 4 Lt (L, - 7 3) (L,- */з) = j - L1 “ I L*+ L i'
<13-119)
Аналогично строятся единичные полиномы для точек 4%10:
/ 4 = f Lj (Lf - 4 - ) L, = Ц L\L, - 1 L,L,,
(13. 120)
/^ = 2 7 L ^ 3 .
(13.121)
Вычислим интегралы (13.119)—(13.121) по формуле (13.117):
% = j j f i d * d # = = ^ F , b>i = ^ f i d x d y = ^ F ,
F
F
<Oio= ^ / x o d * d y = ^ F .
(13.122)
F
Интегралы, соответствующие остальным точкам, выражаются через
шх и ю4: co^Wg = Wi: ш5==со6==со7==ш8==ш9==ш4.
Значения интегралов со/ в дальнейшем будем называть весовыми
коэффициентами. Полученные весовые коэффициенты позволяют
вычислять точные значения интегралов по треугольной области
от любого полинома не выше третьей степени
[ \ X nY mdxdy, 0 < (rc + m ) < 3 .
F
Вычислим
J 5 X " Y m dx dy = (X'IYf + X»Y™ + Х?У?) щ + (X jF f + Х"У? +
+ х т + Х?У? + Х^У* + X jyy) С04 + x m
«10-
Здесь Х ,Уг— координаты точек 1— 10 (рис. 13.3, а).
Аналогичные формулы могут быть построены для вычисления
интегралов для других степеней полиномов. Запишем общий вид
формул численного интегрирования
S S X" 7» dx dy = 2 X l Y ?®1.
£*
i=l
597
T а б л и ц а 13.27
1
55
2 125
3 125
4 1000
5 125
0
1
94 208
2
3 — 119 808
290 816
4
5 —277 248
180 224
6
212 992
7
172 032
8
9 —370 688
376832
10
1
2
3
4
5
6
7
8
1 870,4
4 184,6 '
5 007,8
3773,0
45 138,8
9 604,0
62 426,0
4 802,0
0
‘ 1728
— 1296
3072
3456
3456
—2592
1
м
z
f
А
t t
598
t
F
11
1
2
3
4
0
64
— 16
128
1
2
3
4
9
54
где i'— номер точки; k — число точек; ю4— весовой коэффициент
для точки i.
В табл. 13.27 приведены значения весовых коэффициентов для
всех единичных полиномов до восьмой степени включительно.
§ 13.9. СООТНОШЕНИЯ МЕЖДУ ТРИГОНОМЕТРИЧЕСКИМИ,
ГИПЕРБОЛИЧЕСКИМИ ФУНКЦИЯМИ И ЭКСПОНЕНЦИАЛЬНОЙ
ФУНКЦИЕЙ
При изучении колебаний системы с одной степенью свободы
широко используются соотношения между cosa, sina, cha, shcc
и eia, e~ia, е~а. Ниже в табл. 13.28 приведены эти соотношения.
Т а б л и ц а
13.28
Г иперболи ческне
функцин
Тригонометрические
функцнн
^ “*^^Щ
|^ ^ ^ ^ ^ ^ ^ ^ ^ * * * ^ ^ ^ “ ““^№^ —,||^ ^ ^ ^ ^ ,^^^^*вЬ.
(13.123)
ръ _L е- а
c h a = — 2 jj--- ,
(13.129)
p i a __ g - ta
s t a a = -— g f —
(13.124 )
p a __ p- a
s h a = - — ^ ---
(13.130 )
wa = co sa + ts in a ,
(13.125 )
e<* = c h a + s h a ,
( 1 3 .i3 1 )
e-*'^ = c o s a — i s i n a
(13.126)
e-a = c h a — s h a
(13.132 )
eosa =
g t a - L g - ia
— ,
^ f
s in ( a + P) = s in a c o s p + co s a s in р.
sh ( a 4 - P) = sh a ch P 4 - ch a sh P
(13.127 )
.cosB а + s in ? a = 1
(13.128)
(13.133)
ch?a— s h ? a = l
(13.134)
\
ЗАКЛЮЧЕНИЕ
Использование численных методов и ЭВМ привело к бурному
развитию строительной механики. Количественные возможности
ЭВМ перешли в качественные: из строительной механики стержне­
вых систем развилась фундаментальная строительная механика
с единым подходом к стержневым, тонкостенным пространственным
конструкциям и массивным телам. На примере строительной меха­
ники стало ясным, что такое машинные (простота логики) и нема­
шинные подходы (минимум арифметических операций). Современ­
ная строительная механика позволяет определять напряженно-де­
формированное состояние сложнейших конструкций, а этот вопрос
имеет большое значение при проектировании конструкций и соору­
жений.
Наступил момент, когда необходимо от автоматизированного
расчета переходить к широкому автоматизированному проектирова­
нию, созданию систем автоматизированного проектирования (САПР).
Процесс проектирования (как и процесс расчета) может быть пред­
ставлен в виде набора арифметических и логических операций. Для
автоматизированного проектирования должен быть организован
диалог между человеком и машиной, в котором арифметическую
работу и простейшую логику выполняет ЭВМ, а сложная логика и
принятие решений возлагаются на человека. Проектирование ве­
дется в соответствии с нормами, в которых накоплен громадный опыт
ручного проектирования, поэтому для автоматизированного проек­
тирования в качестве модели используется ручное проектирование.
В существующих нормах заложен принцип «минимума арифметиче­
ских операций», отсюда обилие таблиц, коэффициентов и слож­
ность логики, что затрудняет процесс программирования. По мере
накопления опыта машинного проектирования будут изменяться
и нормы. Строительная механика является наглядной моделью
этого процесса.
ЛИТЕРАТУРА
1. А л ек сан д ров А . B . , Л а щ е н и к о в Б . Я . » Ш а п о ш н и к о в H . Я . С т р ои т е л ь н ая
м е х а н и к а . Т он к ост е н н ы е п р ост р ан ст в е н н ы е систем ы . М . , 1983.
2 . Д а р к о в А . B . , КлеЯн Г . A . , Кузнецов В . t f . и д р . С т р ои т е л ь н ая м е х а н и к а .
М . , 1976.
3 . К и с е л е в В .А . С т р о и т е л ь н а я м е х а н и к а . М . , 1976.
4 . Клейн Г . K *, Л е о н т ь е в Я . Я ., В ан ю ш ен к ов М . Г . и д р .Р у к о в о д с т в о к п р а к ­
тическим з а н я т и я м n o к у р с у строительной м е х а н и к и . М . , 1980.
5 . П р о к о ф ь е в И . П . , С м и р н о в А . Ф . Т е о р и я со о р у ж е н и й . М . , 1948.
6 . Раб и н ов и ч М . M . К у р с строительной м е х а н и к и . М . , 1954.
7 . Р а б и н о в и ч И . M . О с н о в ы строительной м е х ан и к и ст е р ж н е в ы х си ст ем . М . ,
1956.
8. Р ж а н и ц ы н А . Р . С т р о и т е л ь н ая м е х а н и к а . М . , 1982.
9 . С м и р н о в А . Ф . , А л ександ ров Л . В . , Л ащ е н и к ов Б . Я . , Ш ап о ш н и к о в Я . Я .
С т р о и т е л ь н а я м е х а н и к а . С т е рж н ев ы е систем ы . М . , 1981.
10. С м и р н о в А . Ф . , А л ександ ров Л . В . , Л а щ е н и к о в Б . Я-> Ш ап ош н и к ов H . Я .
С т р о и т е л ь н а я м е х а н и к а . Д и н а м и к а и устой чивость с о о р у ж е н и й . М . , 1984.
11. С н и т к о Н . К • С т р о и т е л ь н ая м е х а н и к а . М . , 1972.
12. Ш а п о ш н и к о в Я . Я , С т р о и т е л ь н ая м е х а н и к а т р а н сп о р т н ы х с о о р у ж е н и й .
М . , 1983.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Л иней ное см ещ ен и е у з л а 279
Л о к а л ь н а я степень св об од ы 477
— (м ест н ая) си ст ем а к о о р д и н а т
— н у м е р а ц и я 441
В е к т о р в н еш н и х си л 326
— в н у т р е н н и х си л 326
— д еформ аций 326
— двойственнЫй 324
— перемещ ений 326
Г е о м е т р и ч е ск и и з м е н я е м а я си ст ем а 17
— н е и зм е н я е м а я си ст ем а 16
Г л о б а л ь н а я (о б щ а я ) си ст ем а к о о р д и н а т
364
— н у м е р а ц и я 368
Г раф и ч е ск и й дисплей 394
Г р а ф о п о с т р о и т е л ь 396
Г р у з о в а я э п ю р а 201
Г р у з о в о е с о с т о я н и е дей ствительное 169
Д е к р е м е н т колебаний л огари ф м и ч еск и й
515
Д е ф о р м а ц и о н н а я п р о в е р к а 226
Д и а г р а м м а П р а н д т л я 419
Д и ф ф ерен ц и ал ьн ы й
оп ератор
теори и
у п р у г о с т и 347
Д иф ф еренц иал ьное уравнение
----- св о б о д н ы х колебаний бе з уч ета
зат ухан и й 508
------------ с у ч ет ом зат ухан и й 513
Е д ин ичны е с о с т о я н и я 167
— э п ю р ы 201
— п е р е м е щ е н и я 166, 201
— р е а к ц и и 279
З а т я ж к а а р к и 74
З ак он сох ран ен и я
— Г у к а 326
эн ерги и
И н т е г р и р о в а н и е ч и сл е н н ое 484
И н т е г р а л Д ю а м е л я 526
И н т е р п о л я ц и я п о Л а г р а н ж у 478
К ом плекс-элем ент 485
— универсал ьн ы й 494
— объ ек т н о- ори ен т и рован н ы й 494
— п робл ем н о- ори ен т и ров ан н ы й
494
К о н т у р замкнутый 195
К оэф ф и ц и ен т з а т у х а н и я 513
----- относительный 517
К оэф ф и ц и ен т линей ного р а с ш и р е н и я
"температурны й 186
602
М атриц а
— ж е ст к о ст и с т е р ж н я 372
----- п р я м о у г о л ь н о г о
элем ента
463
----- т р е у г о л ь н о г о эл ем ента 461
— зак он а
Гука
для
ст ерж н я
326
систем ы 328
— к а с а т е л ь н а я 400
— соб ст в е н н ы х ф о р м 532
в е к т о р о в 585
— уравнений р а в н о в е с и я д л я с т е р ж н я
364
------------ систем ы 314
М г н о в е н н о и з м е н я е м а я си ст ем а
17
М гиовенны й центр 20
М ет од Г в о з д е в а 302
— Г а у с с а с в ы б о р о м г л а в н о г о элем ента
564
— Г a y c ca — Ж о р д а н а 564
М о д у л ь п р об л е м н о- ор иентированны й
394
—
объ ек т н о- ори ен т и рован н ы й
Н а г р у з к а п р е д е л ь н ая 422
Н а ч а л ь н ы е у с л о в и я 508
325
364
394
\
Обратны й х о д п о Г а у с с у 563
О п е р а т о р з н а к о в для п р я м о у г о л ь н о г о
элем ента 451
О с н о в н а я си ст ем а м етод а си л 199
------ — перемещ ений 276
----- см е ш а н н о г о м етод а 303
П е р е д а т о ч н а я п р я м а я 40
П е р е м е щ е н и я главны е 326
— г р у з о в ы е 200
— единичны е 200
— об об щ ен н ы е 473
— п об оч н ы е 200
П о я с ф ерм ы 99
П р а в и л о з н а к о в д л я в н у т р е н н и х си л /7
П р и н ц и п н е за в и си м о ст и действия си л ЗО
— в о з м о ж н ы х перем ещ ений 64, 448
— наим еньш ей р а б о т ы 2 0 0
П р и н ц и п ст а ц и о н а р н о ст и полной э н е р ­
гии системы 543
П р о л е т а р к и 73
— ф ерм ы 99
ы
Р а с к о с ф ерм ы 99
Р а с п о р а р к и 70
Р е а к ц и и главны е 280
— г р у зо в ы е 280
— единичны е 280
— об об щ ен н ы е 437
— побочн ы е 280
Р я д Ф у р ь е 522
Силы в н еш н и е 326
— вн у т рен н и е 326
— объемны е 346
Симплекс-элемент 485
С п о с о б в ы р е за н и я у зл о в 107
— зам ены стержней 118
— моментной т очк и 101
— к ом бинированн ы й 307
— нулевой н а г р у з к и 126
— п е р е м н о ж е н и я э п ю р 173
— п осл ед ов ат ел ь н ого у д в о е н и я с у п е р ­
элем ентов 496
— проекций 107
С т ат и ч еск ое п р и л о ж е н и е н а г р у з к и 159
С т а т и ч е ск а я п р о в е р к а 226
С тепень статической неоп ред ел и м ости
194
— кинематической неоп ред ел и м ости
266
— св об од ы 503
Т е о р е м а Бетти 166
— Ж у р а в с к о г о 29
— К а с т и л и а н о 188
— к и н е м ат и ч е ск ая 428
— М а к св е л л а 167
— о в заи м н ост и реакций 284
и перемещений 285
— ст а т и ч е ск а я 422
Т р е н и е в я з к о е 513
— с у х о е 517
■
У г о л сд в и га 348
— п о в о р о т а 279
У р а в н е н и я Н а в ь е 347
— К ош и 348
Ф е р м а а р о ч н а я 152
— М и з е с а 407
Ф о р м а колебаний 532
Ф у н к ц и я Р е л е я 542
— Л а г р а н ж а 543
Х р а н е н и е м ат ри ц ы л ен т очн ое
----- «н е б о ск р е б н о е » 395
395
Ч а с т о т а св об од н ы х колебаний 510
— вы н уж д ен н ы х колебаний 520
о т н оси т е л ь н ая 521
Ш арнирно-п од виж ная оп ор а
— н е п о д в и ж н а я о п о р а 15
Ш а р н и р одиночный простой
— пластический 425
Ш п р е н г е л ь 146
15
198
ОГЛАВЛЕНИЕ
стр.
П р е д и сл о в и е ..............................................
3
В в ед ен и е............................................................................................................................................
Г л а в а 1. Кинематический
7
а н а л и з с о о р у ж е н и й ........................ 14
§ 1.1. О п о р ы .....................................................................................................................
§ 1 .2 . У с л о в и я геом етрической н еи зм ен яем ости ст е р ж н е в ы х систем ...... 16
§ 1.3. У с л о в и я статической оп ред ел и м ост и геом е т ри ч е ск и н еи зм ен яе
мых ст е р ж н е в ы х систем ......................
14
23
Г л а в а 2 . Б а л к и ............................. 27
§ 2 .1 . О б щ и е
с в е д е н и я ................................................................................................27
2 .2 . Л и н и и в л и я н и я о п о р н ы х реакций для од н оп рол ет н ы х и к о н с о л ь
ны х б а л о к ............................................................................................................................... 31
§ 2 .3 . Л и н и и в л и я н и я и з г и б а ю щ и х м ом ен тов и п оп е р еч н ы х сил для од
ноп рол ет н ы х и к он сол ь н ы х б а л о к
34
§ 2 .4 . Л и н и и в л и я н и я п р и узловой п еред аче н а г р у з к и ................................... 38
§ 2 .5 . О п ред ел ен и е усилий с п ом ощ ь ю линий в л и я н и я .............................
41
§ 2 .6 . О п ред ел ен и е невыгодней шего п о л о ж е н и я н а г р у з к и н а с о о р у ж е ­
ни и . Э к в и в а л е н т н а я н а г р у з к а ......................................................... . •
45
§ 2 .7 . М н ог оп рол е т н ы е ст ат и ч е ск и определим ы е б а л к и .............................
51
§ 2 .8 . О п ред ел ен ие усилий в м н огоп рол ет н ы х ст ат и ч е ск и определим ы х
б а л к а х от неподвижной н а г р у з к и ..........................................................
55
§ 2 .9 . Л и н и и в л и я н и я усилий д л я м н ог оп рол е т н ы х ст ат и ч еск и оп ред е­
лимых б а л о к .........................................................................................................
59
§ 2 . 1 0 . О п ред ел ен и е усилий в ст ат и ч е ск и опред ел им ы х б а л к а х с л ом а­
ными ося м и от неподвиж ной н а г р у з к и ................................................
62
§ 2 .1 1 . П о с т р о е н и е линий в л и я н и я в б а л к а х ки н ем ати ческ и м методом
64
§
Гл ава 3. Т рехш арн и рн ы е
арки
и рам ы ....
70
§ 3 .1 . П о н я т и е о б а р к е и ср а в н е н и е ее с б а л к о й ............................................
§ 3 . 2 . А нал итический р а сч е т т р е х ш ар н и р н ой а р к и .......................................
§ 3 . 3 . Г раф и ческ и й р а сч е т т р е х ш ар н и р н ой а р к и . М н о г о у г о л ь н и к д ав ­
л ен ия...................................................
§ 3 . 4 . У р а в н е н и е рац и он ал ь н ой о с и т р е х ш ар н и р н ой а р к и ........................
§ 3 .5 . Р асч ет т рех ш арн и рн ы х а р о к на п од ви ж н ую н а г р у зк у . . . .
§ 3 . 6 . Я д р о в ы е моменты и н орм ал ь н ы е н а п р я ж е н и я ..................................
70
73
Г л а в а 4 . П л о с к и е ф е р м ы .................................................................................................. .....
98
§ 4 .1 .
§ 4 .2 .
§ 4 .3 .
§ 4 .4 .
§ 4 .5 .
§ 4 .6 .
§ 4 .7 .
604
П о н я т и е о ф е р м е . К л а с с и ф и к а ц и я ф е р м ................................................
О п ре д е л е н и е усилий в с т е р ж н я х простей ш их ф е р м ........................
О п ре д е л е н и е усилий в с т е р ж н я х сл о ж н ы х ф е р м .............................
Р а сп р е д е л е н и е усилий в эл ем ентах ф е р м р а з л и ч н о г о о ч е р т а н и я
И сс л е д о в а н и е н еи зм ен яем ост и ф е р м ..........................................................
Л и н и и в л и я н и я усилий в с т е р ж н я х простей ш их ф е р м ...................
Л и н и и в л и я н и я усилий в с т е р ж и я х с л о ж н ы х ф е р м , , , ., , f *
82
87
88
95
98
101
118
121
125
133
142
§ 4 . 8 . Ш п рен гел ьн ы е систем ы
. , . ♦ • . . . • , , , f , , , , .
§ 4 . 9 . Т р е х ш а р н и р н ы е а р о ч н ы е ферм ы и к о м б и н и р ов ан н ы е систем ы «
Г л а в а 5 , О п ред ел ен и е перемещений в у п р у г и х си ст е м ах
§ 5 .1 .
§ 5 .2 .
§ 5 .3 .
§ 5 .4 .
§ 5 .5 .
§ 5 .6 .
§ 5 .7 .
§ 5 .8 .
§ 5 .9 .
* ,
.
« # ,
,
«
Р а б о т а в и е ш н и х си л . П от е н ц и ал ь н ая э н е р г и я . , . , . , 4 «•
Т е о р е м а о в заи м н ост и р а б о т ........................................................................
Т е о р е м а о в заи м н ост и п е р е м е щ е н и й ..................................................... ,
О п ред ел ен и е перемещений . И н т е г рал М о р а * . . . , , , , *
П рав и л о В ерещ агина
. * . * . , ................................................ , ,
П р и м е р ы р а сч е т а
...................................... . , • , ........................ .... ,
Т е м п е рат у рн ы е
п е р е м е щ е н и я ................................................................... ,
Эиергетический п ри е м оп ред ел ен и я п е р е м е щ е н и й .............................
П е р е м е щ е н и я ст ат и ч еск и опред ел им ы х си ст ем , вы зы ваемы е п е ре ­
м ещ ениям и о п о р
• , . , , * , , » . . , . , , « . • # . «
Г л а в а 6 . Р а с ч е т ст ат и ческ и неоп ред ел им ы х систем м етодом сил
.
.
.
146
152
159
159
163
166
168
173
179
185
188
189
* ,
193
6 .1 . С т а т и ч е ск а я н еоп ред ел им ость
. . . . , . , , * * « , , * ,
6 .2 . К а н о н и ч е ск и е у р а в н е н и я м етод а с и л .....................................................
6 .3 . Р а с ч е т ст ати ческ и неопределим ы х систем н а действие заданной
н агрузк и
................................................................................................................
§ 6 .4 . Р а с ч е т ст ат и ч еск и неопределим ы х систем н а действие тем п ера­
туры
..........................................................................................................................
§ 6 .5 . С о п ост ав л е н и е к а н о н и ч е с к и х уравнений п р и р асч ет е си стем н а
п ерем ещ ен и я о п о р
...........................................................................................
§ 6 .6 . О п р е д е л е н и е п е р е м е щ е н и й в ст а т и ч е ск и н е о п р е д е л и м ы х си с т е м а х
§ 6 .7 . П о с т р о е н и е э п ю р п оп ереч н ы х и п род ол ь н ы х си л . П р о в е р к а э п ю р
§ 6 .8 . С п о с о б у п р у г о г о ц е н т р а ......................................................... .......................
§ 6 .9 . Л и н и и в л и я н и я простей ш их ст ат и ческ и неопред ел им ы х систем
§ 6 . 1 0 . И с п о л ь з о в а н и е с и м м е т р и и ........................................... .... ............................
§ 6 . 1 1 . Г р у п п и р о в к а н е и з в е с т н ы х .............................................................................
§ 6 . 1 2 . Сим м етричны е и о б рат н оси м м ет ри ч н ы е н а г р у з к и ........................
§ 6 . 1 3 . С п о с о б п р е о б р а з о в а н и я н а г р у з к и ..............................................................
§ 6 .1 4 . П р о в е р к а коэф ф и ц и ен тов и св об од н ы х ч л ен ов системы к а н о н и ­
ч еск и х уравнений
...........................................................................................
§ 6 .1 5 . П р и м е р ы р а сч е т а р а м ................................................................................. ,
§ 6 .1 6 .« М о д е л и » л и н и й в л и я н и я у с и л и й д л я н е р а з р е з н ы х б а л о к . . .
193
199
§
§
§
Г л а в а 7. Р а с ч е т стати ческ и неопределим ы х систем м етодам и перемещений
и см еш анны м
. , ......................................................................................................... .
§
§
§
§
§
7 .1 .
7 .2 .
7 .3 .
7 .4 .
7 .5 .
§
7 .6 .
§
7 .7 .
§ 7 .8 .
§ 7 .9 .
§ 7 .1 0 .
§ 7 .1 1 .
§ 7 .1 2 .
§ 7 .1 3 .
§ 7 .1 4 .
В ы б о р неизвестны х в методе п е р е м е щ е н и й ......................................
О п ред ел ен и е ч и сл а н е и з в е с т н ы х ..............................................................
О с н о в н а я с и с т е м а ...............................................................................................
К ан он и ч е ск и е у р а в н е н и я
............................................................................
Статический с п о с о б оп ред ел ен и я к оэф ф и ц и ен т ов и св о б од н ы х
чл енов системы к ан о н и ч е ск и х у р а в н е н и й ...........................................
О п ред ел ен и е к оэф ф и ц и ен т ов и св об од и ы х ч л енов системы к а ­
н он и ч е ск и х уравнений п ерем н ож ен и ем э п ю р ..................................
П р о в е р к а к оэф ф и ц и ен т ов и св об од н ы х чл енов системы к а н о н и ­
ч еск и х уравнений м етода п е р е м е щ е н и й ................................................
П о с т р о е н и е эп ю р M , Q и N в заданной с и с т е м е ........................ ....
Р а с ч е т м етодом перемещений н а действие тем ц ерат у ры . . . .
И с п о л ь з о в а н и е си м м ет ри и п ри р асч е т е р а м методом п ерем ещ е­
ний ......................... ...................................................................................................
П р и м е р р а сч е т а рам ы методом п е р е м е щ е н и й ..................................
Смешанный метод р а с ч е т а .............................................................................
К о м б и н и р о в а н н о е реш ен и е за д а ч методами си л и перемещений
П о с т р о е н и е линий в л и я н и я методом перемещений . # , , # ,
202
213
215
219
222
228
231 .
238
241
243
245
247
249
263
265
265
266
269
276
280
283
286
287
288
292
295
302
307
309
605
Г л а в а 8 . П о л н а я си ст ем а уравненнй строительной м е х а н и к и ст е р ж и е в ы х
систем и методы ее р е ш е н и я . , , , . , * , * , , , . , , , , , .
§ 8 . 1 . О б щ и е за м е ч а н и я
. * ..........................................................* .......................
§ 8 . 2 . С ост ав л е н и е уравнений р а в н о в е с и я , ст ат и ч еск и е у р а в н е н и я . И с ­
сл ед ов ан и е о б р а з о в а н и я с и с т е м .............................................................. *
§ 8 . 3 . С о ст а в л е н и е у р а в н е н и й со в м е ст н о с т и , геом ет ри ческ и е у р а в н е н и я .
П р и н ц и п д в о й с т в е н н о с т и ......................................................... . , . * #
§ 8 . 4 . З а к о н Г у к а . Ф и з и ч е с к и е у р а в н е н и я ..........................................................
§ 8 . 5 . С и ст ем а уравнений строительной м е х а н и к и . Смеш анный метод
§ 8 . 6 . М ет од перемещений
« , , , . . ............................. .... , , , « * «
§ 8 . 7 . М ет од сил
> . « * » • • * . . * . . . . . . . • • « . • .
§ 8 . 8 . У р а в н е н и я т е ори и у п р у г о ст и и и х с в я з ь с у р а в н е н и я м и ст р о и ­
тельной м ех ан и к и
........................................................................ .... , , f *
Г л а в а 9 . Р а с ч е т ст е р ж н е в ы х систем с и сп о л ь зо в а н и е м Э В М
* • ,
,
,
t
313
313
31 3
321
326
328
333
341
345
*
352
§ 9 . 1 . В в од н ы е за м е ч а н и я
. . ..................................................................................
§ 9 .2 , П ол у ав т ом ат и зи ров ан н ы й р а сч е т ст ат и ческ и неопред ел им ы х си с ­
тем с и сп ол ь зов ан и ем к а л ь к у л я т о р о в .....................................................
§ 9 3 . А в т о м а т и з а ц и я р а с ч е т а ст е р ж н ев ы х си стем . П о л н а я си стем а
уравнений строительной м ех ан и к и для с т е р ж н я . . . . .■ . .
§ 9 . 4 . М ат р и ц ы реакций (ж е ст к ост и ) для п л о ск и х и п р ост р ан ст в е н н ы х
стержней и их и с п о л ь з о в а н и е ...................................................................
§ 9 .5 . О п и са н и е у ч е б н о г о к ом п л ек са п о р а сч е т у ст е р ж н ев ы х систем .
В н у т р ен н е е и внеш нее п ред ставл ение и сх од н ы х д аи н ы х . Бл оксх е м а к ом п л ек са п о р а сч е т у ст е рж н ев ы х систем . , * * * . -
352
389
Г л ав а 10. У ч е т геометрической и физической нелинейности п р и расч ет е
стерж н евы х систем
j $ j * * . . . * , . . . . . . . * i § $ #
397
35 3
363
372
§ Ю . 1 . 0 б щ и е з а м е ч а н и я ......................................................................................................397
§ 10.2. Р а с ч е т с т е р ж н е в ы х систем с учетом геом етрической нелинейно­
сти
* * • t # • » .............................* ■ • * * . . • t ^ g . •
398
§ 1 0 .3 .У с т о й ч и в о с т ь ст е р ж н е в ы х с и с т е м ................................................................ 411
§ 10.4. Р а с ч е т ст ерж н ев ы х систем с учетом ф и зи ч еск ой нелиней ности.
П р е д е л ь н о е со с т о я н н е
...................................... .... . t 4 t 9 , , ,
419
Г л ава
11. М ет од
к он еч н ы х
элем ентов
(М К Э )
,
4 * # # .
* ,
* » ,
t
t
435
§ 1 1 . 1 . О б щ и е за м е ч а н и я
. , * * , , * ....................................... .... , # ,
435
§ 1 1 . 2 . С в я з ь М К Э с у р а в н е н и я м и строительной м е х а н и к и ................... ......435
§ 11.3. П о с т р о е н и е м а г р н ц ж е ст к ост и для р е ш е н и я плоской зад ач и тео­
р и и у п р у г ост и
» . ........................................... * ............................ .... . .
456
§ 1 1 . 4 . Предельный п е р е х о д для плоской з а д а ч и ........................................... ......464
§ 1 1 . 5 . П о с т р о е н и е м ат ри ц ж е ст к ост и для р е ш е н и я объемной зад ач и
т еори и у п р у г о ст и
........................................................................................... ......467
§ 11.6. С л ож н ы е элементы, п ост рое н и е м ат ри ц ж е ст к ост и д л я элементов
с искривленной границей ................................................................................... 471
§ 11.7. П о с т р о е н и е м ат ри ц реакций для р а с ч е т а п л аст и н ок и о б о л о ч е к
485
§ 11.8. О с о б е н н о ст и к ом п л ек сов для р а сч е т а конструкций п о М К Э . С у ­
перэлементный п од х од
................................. , , * . , . , , . .
493
Г л а в а 12. О с н о в ы
606
д и н ам и к и
с о о р у ж е н и й ...................................................................
501
§ 1 2 . 1 . В ид ы д и н ам и ч е ск и х воздействий. П о н я т и е о ст е п е н я х св об од ы
§ 12.2. С в обод н ы е к о л е б а н и я систем с одной степ енью св об од ы . . . .
§ 12.3. Р а с ч е т систем с одной степ ен ью св об од ы п ри действии иериодической н а г р у зк и
...............................................................................................
§ 12.4. Р а с ч е т систем с одной степ енью св об од ы п р и действии п р о и з ­
вольной н а г р у з к и . И н т е г рал Д ю а м е л я ............................. .... . . .
§ 12.5. Д в и ж е н и е системы с д вум я степеням и св о б о д ы . П р и в е д е н и е
в системы с д вум я степеням и св об од ы к двум систем ам с одной сте­
пенью с в о б о д ы ....................................................................... .... t , , , .
§ 12.6. К и н е т и ч еск ая э н е р г и я . У р а в н е н и е Л а г р а н ж а ♦ f . * « • • •
501
518
524
529
536
§ 1 2.7. П р и в е д е н и е к и н е м а т и ч е ск ог о воздей ствия к си л о в о м у * * , *
§ 1 2 .8 . С ведение систем ы д и ф ф е р е н ц и ал ь н ы х уравн ен и й д и н ам и к и к
разд ел яю щ и м ся у рав н ен и ям с п ом ощ ью реш ен ия
п робл ем ы
соб ст в е н н ы х з н а ч е н и й ........................ ..............................................................
§ 12.9. М е т од п о с т о я н н о г о у с к о р е н и я и е г о и с п о л ь з о в а н и е д л я р е ш е н и я
д и н ам и ч е ск и х з а д а ч , , , . , , , » .........................* , , , , ,
Г л а в а 13. С в ед е н и я и з вычислительной м ат ем ат и к и , и сп ол ь зу е м ы е в с т р о и ­
тельной м е х а н и к е
, * , * * , .» » j , , , » . . , , . , , , « , #
§ 1 3 .1 .
§ 13.2.
§ 1 3 .3 .
§ 13.4.
§ 1 3 .5 .
§ 1 3.6.
§ 13.7.
§ 13.8.
§ 13.9.
........................ .... . . ........................................... ,
О б щ и е за м е ч а н и я
М ат р и ц ы , и х виды, простей ш ие о п е р ац и и над м ат ри ц ам и . , *
П е р е м н о ж е н и е м а т ри ц . О б р а т н а я м а т р и ц а ......................................
М ет од Г а у с с а д л я р е ш е н и я систем линейных уравн ен и й . Р а з л о ­
ж е н и е м атриц ы в п рои зве д ен и е т р ех м а т р и ц ......................................
И сс л е д о в а н и е систем линейных у равн ен и й . О д н о р о д н ы е у р а в ­
н е н и я . Р е ш е н и е n уравнений с tn неизвестны м и с и с п о л ь з о в а ­
нием м етода Г а у с с а ...........................................................................................
К в а д р а т и ч н а я ф о р м а . М а т р и ц а квадратичной ф ор м ы . П р о и з ­
в о д н а я от квадратичной ф орм ы . . . . . * ..................................
С обствен н ы е ч и сл а н с о б с т в е н н ы е в е к т о р ы п ол ож и т е л ь н о о п р е ­
деленной м атрицы
...................................... ....................................................
О д н о р о д н ы е к оор д и н ат ы и и н т е г р и р о в а н и е п о треугольной о б ­
л асти
............................................................................ .... ......................................
С о о т н о ш е н и я м еж д у т р и г он ом е т р и ч е ск и м и , ги п е рб ол и ч еск и м и
ф у н к ц и я м и и эк сп он енц иал ьной функцией * . , * . « , . ,
З а к л ю ч е н и е ..................................................... .... * , * s * t * , , , , , , .
Л итература • * . . . . . . . . . • * * . . * § * « « . . < . $ .
Предметный у к а за т е л ь . . * » * 4 , * * s * s , * * * # * * * s .
* .
. «
, *
544
54 6
550
554
554
555
557
562
574
578
581
594
599
600
601
602
Учебное издание
А натол ий В л а д и м и р о в и ч Д а р к о в
Н икол ай Н и к о л а е в и ч Ш а п о ш н и к о в
СТРОИТЕЛЬНАЯ М ЕХАНИКА
Зав. редакцией А. В. Дубровский. Редактор М. А. Алексеева. МладшиЙ ре«
дактор H. М. Иванова. Переплет художннка Б. А. Школьника. Художествен­
ный редактор Л. К. Громова. Технический редактор H. В. Яшукова. Коррек­
тор Р. К. Косинова
ИБ № 5770
Изд. № OT-521. Сдано в иабор 28.03.86. Подпнсаио в печать 29.09.86.
Ф орм ат60х90/1в. Бум. тип. № 1. Гарнитура литературная. Печатьвысокая.
Объем 38 усл. печ. л. 38 усл. кр.-отт. З5,69 уч.-изд. л. Тираж 85 000 экз.
Заказ № 2418. Цена 1 p. 40 к.
Издательство«Высшая школа». 101430, Москва, ГСП-4, Неглиннаяул.,
д. 29/14
Ордена Октябрьской Революцнн н ордена Трудового Красного Знамени
МПО «Первая Образцовая типография» именн А. А. Жданова
Союзполнграфпрома при Государственном комитете СССР
по делам издательств, полиграфин и книжной торговли.
113054. Москва, Валовая, 28