ИДЗ С
реклама

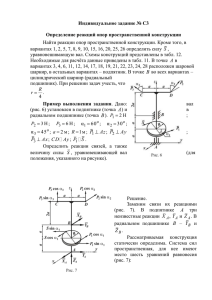
Индивидуальное задание № С1 Определение реакций связей, наложенных на раму Найти реакции связей, наложенных раму. Схемы конструкций представлены табл. 7. Числовые данные для решения задачи указаны в табл. 6. Пример выполнения задания. на в Дано: схема конструкции (рис. 1); G 3 кH ; P1 2 кH ; P2 0 ; P3 5 к H ; q 8 кН м ; M 4 кН м ; α1 30 o ; α 2 60 o ; a 1 м . Определить реакции наложенных на раму. связей, Решение. Заменим связи, наложенные на раму, их реакциями (рис. 2). Направление реакции шарнира A неизвестно, определяем её составляющие по осям координат X A и Y A . Реакция R B подвижной опоры направлена перпендикулярно плоскости опоры и разложена на составляющие R B cos α 2 и R B s i n α 2 . Сила натяжения нити S D направлена по нити от рамы и равна по величине весу груза, т.е. S D G 3 кН . Равномерно распределённую нагрузку интенсивностью q заменим её равнодействующей Q 2a q 2 1 8 16 кН , приложенной в середине участка AC . Для плоской системы сил, приложенных к раме, составим три уравнения равновесия: M A 0 ; X i 0 ; Yi 0 . M A Q a P3 sin α1 2a P2 cosα 2 2a P2 sin α 2 a S D 2a P1 sin α1 2a P1 cos M R B sin α 2 2a R B cosα 2 4a 0; (1) X i X A Q P3 si n α1 P2 cosα 2 (2) S D P1 si n α1 R B si n α 2 0; Yi Y A P3 cosα1 P2 sin α 2 P1 cosα1 RB cosα 2 0 . (3) Из уравнения (1) определяем реакцию опоры B , принимая P2 0 : Q a P3 sin α1 2a S D 2a P1 sin α1 2a P1 cosα1 4a M ; RB sin α 2 2a cosα 2 4a 16 1 5 1 2 2 3 2 2 1 2 2 2 3 2 4 4 7,483 кН . 3 2 2 1 2 4 Из уравнения (2) определяем X A : X A Q P3 si n α1 S D P1 si n α1 R B si n α 2 ; RB X A 16 5 1 2 3 2 1 2 7,4833 3 2 26,98 кН . Из уравнения (3) определяем Y A : Y A P3 cos α1 P2 sin α 2 P1 cosα1 R B cosα 2 ; Y A 5 3 2 2 3 2 7,4833 3 2 0,4185 кН . Знаки плюс, полученные при вычислении, означают, что выбранные направления векторов R B и Y A совпадают с их действительными направлениями; знак минус при вычислении величины вектора X A указывает на то, что вектор направлен в противоположную сторону от показанного на рисунке. Для проверки правильности выполненных расчетов составляем уравнение равновесия относительно произвольно выбранной точки (точки C ): M C Q a X A 2a P2 si n α 2 a P1 cosα1 4a M R B si n α 2 4a R B cosα 2 4a 0; M C 16 1 ( 26,9807 2) 2 3 24 4 7,4833 3 2 4 7,4833 1 2 4 0. вариант 1 2 3 4 5 6 7 8 9 10 Данные для индивидуального задания № С1 q P1 P2 P3 α1 α2 G M кНм кН кН кН кН кН/м градус градус 4 0 5 9 10 0,5 45 60 2 6 0 10 12 1,2 30 45 3 4 12 0 14 2,0 60 30 6 0 8 15 6 2,2 45 60 10 16 0 20 8 3,0 30 45 12 8 20 0 13 1,6 60 30 16 0 6 20 5 1,8 45 60 8 12 0 6 9 1,5 30 45 4 20 18 0 30 2,4 60 30 6 0 12 25 22 0,8 30 60 a м 0,5 1,0 1,2 0,8 1,0 0,5 0,6 0,4 1,0 1,2 Схемы конструкций к заданиям № С1 задание №1 задание №2 задание №3 задание №4 задание №5 задание №6 задание №7 задание №8 задание №9 задание №10 задание №11 задание №12 задание №13 задание №14 задание №15 задание №16 задание №17 задание №18 задание №19 задание №20 задание №21 задание №22 задание №23 задание №24 задание №25 задание №26 задание №27 задание №28 задание №29 задание №30 При защите выполненной работы студент должен быть готов ответить на контрольные вопросы. Контрольные вопросы 1) Порядок решения задач статики. 2) Виды связей, реакции связей. 3) Аксиома связей (принцип освобождаемости от связей). 4) Алгебраический момент силы относительно центра на плоскости. Правило знаков для момента силы. 5) Уравнения равновесия плоской системы сил. 6) Задачи статически определимые и статически неопределимые.