ТЕОРЕМА ОБ ИЗМЕНЕНИИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ МЕХАНИЧЕСКОЙ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
реклама

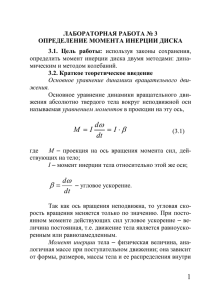
ТЕОРЕМА ОБ ИЗМЕНЕНИИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ МЕХАНИЧЕСКОЙ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ Исходная схема Параметры системы Дано: m1, m2, m3; R1, R2, r2, i2; M = const; Mc = const; T0 = 0, s. Найти: v3. Механическая система, состоящая из дисков 1 и 2 и груза 3, начинает движение в вертикальной плоскости из состояния покоя под действием постоянного момента M или постоянной силы P. На диск 2 действует постоянный момент сил сопротивления Mc. Определить скорость v3 груза 3 после его перемещения на расстояние s. m1 – масса диска 1; m2 – масса диска 2; m3 – масса груза 3; R1, r1 – радиусы большой и малой окружностей диска 1; i1 – радиус инерции диска 1 (если i1 не задан, то диск 1 считается однородным диском); R2, r2 – радиусы большой и малой окружностей диска 2; i2 – радиус инерции диска 2 (если i2 не задан, то диск 2 считается однородным диском); M – постоянный движущий момент; P – постоянная движущая сила; Mc – постоянный момент сил сопротивления; T0 - начальная кинетическая энергия данной системы (T0 = 0); s – расстояние, пройденное грузом 3; v3 – искомая скорость груза 3 в конечном положении механической системы. Пример выполнения задания Пример решения задачи Одностепенной механизм (рис. 1) состоит из трех подвижных твердых тел – звеньев, соединенных нерастяжимым тросом: ползуна 1 массой m1 , колеса 2 массой m2 , радиуса r2 , центрального радиуса инерции i2 и колеса 3 массой m3 , радиуса r3 , радиуса инерции i3 . В начальное мгновение t0 0 механизм не имел скорости. Принимая за обобщенную координату q направленное смещение s груза 1, т.е. полагая q s, найти скорость груза v s , как функцию перемещения s . При этом считать, что имеется сухое трение груза об опору с известным коэффициентом трения f и момент трения качения с коэффициентом трения δ; заданы углы α и β наклонной поверхности. Все величины заданы в СИ. Решение: Пусть s – обобщенное перемещение механизма, s v – обобщенная скорость, s - обобщенное ускорение. Покажем механизм в движении, в его произвольном «положительном состоянии», когда фазовые координаты s 0 , s 0 . Покажем веса G1 , G2 , G3 , а также - идеальные (не имеющие мощности) реакции голономных связей: N1 , N 2 , N3 , где, очевидно, N1 G1 cos , N3 G3 cos . Имеем силы трения и моменты пар сил трения F1 fN1 fG1 cos , M 3 N3 G3 cos . Звено 1 - выполняет прямолинейное поступательное движение, Звено 2 – вращательное движение с угловой скоростью 2 v , r2 Звено 3 – плоское движение со скоростью центра масс v3 v , угловой скоростью Найдем v . r3 мощность системы сил, приложенных к механизму посредством скалярного умножения сил на скорости их точек приложения: P G1 v F1 v N1 v G2 O N 3 v3 G3 v3 M 3 , или P G1v sin F1v G3v sin M 3 v r3 Обобщенная сила механизма по обобщенной координате s (обобщенная скорость v ) находится из мощности приложенных сил P по формуле Q P P s v Окончательное выражение для обобщенной силы Q G1 sin F1 G3 sin M3 r3 или Q m1 g sin fm1 g cos m3 g sin m3 g cos r3 (9) Из выражения (9) видно, что обобщенная сила не зависит от времени Q const , поэтому работа системы сил на перемещении из начального положения ( s 0 ) в произвольное конечное положение ( s 0 ) равна s A Qds Qs (Нм≡Дж), (10) 0 где Q – получено ранее (9). Теперь найдем к кинетической энергии механизма в произвольном его состоянии, задаваемом векторной строкой [ s v 0, s 0 ] Она состоит из кинетической энергии трех подвижных звеньев. mv2 1) кинетическая энергия поступательного движения звена равна 2 2) вращательного движения mv2 J z w2 miz2 w2 , 2 2 3) плоского движения: l 2 milz2 w2 , где lz – ось, проведенная через 2 центр масс перпендикулярной плоскости движения. Находим двойную кинетическую энергию механической системы 2T m1v 2 m2i22 w22 m3v 2 m3i32 w32 или m2i22 m3i32 2 2T m1 2 m3 2 v r2 r3 Общий множитель при квадрате обобщенной скорости в двойной кинетической энергии называется приведенным коэффициентом инерции механизма, или, более точно для данного случая - приведенной массой механизма (т.к. в качестве обобщенной была выбрана линейная координата): m2i22 m3i32 a m1 2 m3 2 r2 r3 (11) Подставляя результаты (11) и (9) в (7) и учитывая условие задачи v0 0 . получаем ответ q 2 2bQq при q s, q v , или m3 g cos 2 m1 g sin fm1 g cos m3 g sin r3 2 s, v 2 2 mi mi m1 22 2 m3 323 r2 r3 (7) Выражение (7) дает взаимосвязь между перемещением s груза (1) и его скоростью v .