ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
реклама

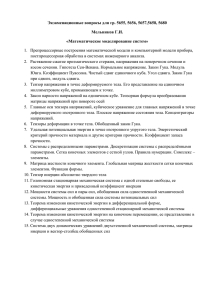
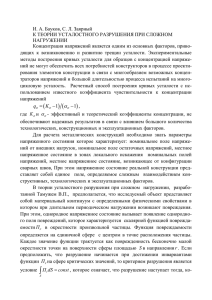
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ 6. Основные соотношения Плоская задача включает в себя плоскую деформацию и обобщенное плоское напряженное состояние. 6.1. Плоская деформация Плоская деформация представляет собой такое напряженно- деформированное состояние, когда все перемещения точек тела происходят параллельно одной плоскости xOy . Такое состояние испытывают призматические или цилиндрические тела, высота которых (длина тела) существенно превышает размеры основания. Нагрузка при этом приложена только на гранях параллельно основаниям и не меняется вдоль высоты (длины) тела. В качестве примеров можно привести тело плотины или массивной подпорной стенки (рис. 5, а), длинного катка (рис. 5, б), балки большой ширины сечения (рис. 5, в). Рис. 5 Поскольку перемещения являются функциями только двух переменных u u x, y , v v x, y , w 0 , из формул Коши следует, что z 0, yz 0 , 33 zx 0 , а остальные деформации также являются функциями только переменных x и y: x x x, y , y y x, y , xy xy x, y . (40) При z 0 из третьей формулы закона Гука (24) следует 1 z x y 0 , E откуда z x y . С учетом (41) остальные ненулевые деформации приводятся к такому виду: 1 2 x y , x E 1 1 2 y x , y E 1 xy 2 1 xy . E Вводя в этих выражениях новые упругие постоянные E1 E , 1 , 2 1 1 (42) получаем: 1 x 1 y , E1 1 y y 1 x , E1 2 1 1 xy xy . E1 x (43) С учетом (40) и (43) на основании формул закона Гука в обратной форме (31) заключаем, что напряжения, так же, как перемещения и деформации, являются функциями только переменных x и y : 34 x x x, y ; y y x, y , z z x, y , xy xy x, y , yz zx 0. (44) Основные уравнения теории упругости при плоской деформации упрощаются. Так, из трех дифференциальных уравнений равновесия (1) остаются два: x xy X 0 , x y x y Y 0. x y (45) Так как основания тела свободны от нагрузки, а на боковых поверхностях направляющий косинус нормали n 0 , то из трех условий на поверхности (3) остаются также два: X xl xy m, Y yxl y m. (46) Из шести формул Коши (19) остаются три: u v , y , x y v u . x y x xy (47) Шесть условий сплошности Сен-Венана (21), (22) сводятся к одному: 2 2 2 x y xy 2 . y 2 x xy (48) Как было показано раньше, из шести деформаций ненулевыми остаются только три. Соответственно обобщенный закон Гука с учетом упругих постоянных (42) выражается тремя формулами (43). 35 6.2. Обобщенное плоское напряженное состояние Обобщенное плоское напряженное состояние характеризуется отсутствием нормальных напряжений на площадках, параллельных одной из координатных плоскостей ( xOy ). Такое напряженное состояние появляется в тонких пластинках, нагрузка к которым приложена только на боковой поверхности силами, параллельными основаниям и равномерно распределенными по толщине пластинки (рис. 6). Рис. 6 Поскольку основания пластинки свободны от нагрузки, то на них z 0 . Из-за малой толщины пластинки можно полагать, что z 0 по всей ее толщине. По тем же причинам можно считать yz 0 , zx 0 , а остальные напряжения постоянными по толщине пластинки: x x x, y ; y y x, y ; xy xy x, y . (49) Таким образом, все ненулевые напряжения являются функциями только координат x и y , а z 0; yz 0 ; zx 0 . Из третьей формулы закона Гука (24) следует, что 36 (50) (51) z E x y , т.е. основания пластинки будут искривляться. Таким образом, формулы закона Гука принимают вид: 1 x y ; E 1 y y x ; E z x y ; E 2 1 xy xy , E x (52) а yz zx 0 . Формулы (52) отличаются от формул закона Гука для плоской деформации (43) только упругими постоянными. Остальные соотношения плоской деформации: условия равновесия (45), условия на поверхности (46), формулы Коши (47) и условие сплошности (48) сохраняют свой вид и для обобщенного плоского напряженного состояния. Это обстоятельство позволяет объединить обе задачи в одну – плоскую задачу теории упругости. Кстати, пластинку можно рассматривать как призматическое тело, высота которого (толщина пластинки) мала по сравнению с размерами основания. В призматических таком случае при одинаковых условиях загружения тел (только на боковых поверхностях нагрузкой, параллельной основаниям и не меняющейся вдоль высоты тела) для тел с высотой, значительно превышающей размеры основания, имеем плоскую деформацию, а для тел с высотой, значительно меньшей размеров основания, имеем плоское напряженное состояние. 37 Вопросы для самоконтроля 1. Что такое плоская задача теории упругости? 2. Что такое плоская деформация? Обобщенное плоское напряженное состояние? 3. При каких условиях может иметь место плоская деформация? Обобщенное плоское напряженное состояние? 4. Почему можно объединить плоскую деформацию и плоское напряженное состояние в одну – плоскую задачу? 5. Чем отличаются основные уравнения плоской деформации и обобщенного плоского напряженного состояния? 7. Решение плоской задачи в напряжениях для прямоугольных областей 7.1. Постановка задачи. Функция напряжений Для определения трех неизвестных составляющих напряжений ( x , y , xy ) имеем два уравнения равновесия (45) и уравнение совместности деформаций (48). При решении в напряжениях условие (48) необходимо преобразовать, заменив деформации через напряжения. Подставим в него деформации из закона Гука (52): 2 1 2 xy 1 2 1 2 x y E x2 y x E xy E y 2 или 2 y 2 y 2 xy 2 x 2 x 2 1 0. y 2 y 2 x 2 x 2 xy (53) Продифференцируем первое уравнение Навье (45) по x , второе по y и почленно сложим. При постоянстве объемных сил получаем: 38 2 2 xy 2 x y 2 0, x 2 y 2 xy откуда 2 xy 2 2 x y 2 . xy x 2 y 2 Подставляя полученное выражение в (53), после приведения подобных приходим к такому соотношению: 2 2 2 x y 2 x y 0, x 2 x 2 y 2 y 2 иначе: 2 2 x y y 2 x y 0 x 2 или 2 x y 0 . (54) Уравнение такого вида называется гармоническим, а функция x y , удовлетворяющая ему, является гармонической. Таким образом, задача приведена к интегрированию двух уравнений равновесия: x xy X 0, x y xy x y y Y 0 и уравнения сплошности: 2 x y 0 . Введем некоторую функцию так, чтобы уравнения равновесия удовлетворялись тождественно: 39 2 2 y x 2 , y 2 , y x xy (55) X y Y x. xy 2 Функция называется функцией напряжений (функцией Эри). Подставим напряжения, выраженные через функцию Эри (55) в уравнение сплошности (54). Получаем 2 2 2 2 0, x y 2 т.е. 22 0 или 4 0 . (56) Обозначение 4 читается «набла четыре» и называется двойным дифференциальным оператором Лапласа. В развернутом виде уравнение (56) запишется так: 4 4 4 4 2 2 2 4 0. x x y y 4 Функция , удовлетворяющая уравнению (57) (56), называется бигармонической. Выразим граничные условия также через функцию напряжений: 2 2 l X y Y x m X , y 2 x y X y Y x l 2 m Y . xy x 2 (58) 2 Таким образом, решение плоской задачи сводится к отысканию бигармонической функции , удовлетворяющей граничным условиям. 40 Решение в полиномах 7.2. Решение в полиномах является одним из вариантов реализации обратного метода решения плоской задачи. Рассмотрим варианты полиномов, принимаемых для выражения функции напряжений. Полином первой степени 1 a1 x b1 y , очевидно, неприменим для функции (59) напряжений, т.к. его вторые производные обращаются в ноль, что соответствует отсутствию напряжений. Полином второй степени a2 2 c2 2 2 x b2 xy y 2 2 (60) дает нулевые четвертые производные, следовательно, бигармоническое уравнение (56) производные удовлетворяется являются тождественно. константами, что При соответствует этом вторые постоянству напряжений и, следовательно, равномерной нагрузке на контуре пластинки. Полином третьей степени 3 a3 3 b2 2 c d x x y 3 xy 2 3 y 3 3 2 2 1 1 2 23 (61) также дает нулевые четвертые производные, т.е. является бигармоническим. Так как вторые производные этого полинома являются линейными функциями, то такая функция напряжений соответствует линейно меняющейся нагрузке на контуре пластинки. Полином четвертой степени 4 a4 4 b4 3 l d l x x y 4 x 2 y 2 4 xy 3 4 y 4 43 3 2 22 23 3 4 дает такие четвертые производные: 44 2a4 ; x 4 44 c4 ; x 2y 2 Подставляя их в уравнение (56), получаем 41 4 2l4 . x 4 (62) 2a4 2c4 2l4 0 или a4 c4 l4 0 . (63) Таким образом, полином (62) удовлетворяет бигармоническому уравнению при условии (63). Т.е. любые четыре коэффициента, например a4 , b4 , c4 , d 4 могут быть взяты произвольными, а пятый должен быть выражен через них из (63): l4 a4 c4 . Тогда полином (62) должен выглядеть так: x4 x2 y 2 y 4 b4 3 y 4 d4 4 a4 x y c4 xy 3 . 4 3 3 4 3 2 2 2 3 4 2 3 Аналогично можно показать применение полиномов более высокой степени для решения задачи. В общем случае нагружения необходимо разложить нагрузку на контуре по полиномам. Далее для каждой составляющей нагрузки принять соответствующую функцию напряжений и найти ее коэффициенты из граничных условий. Просуммировав затем полученные функции напряжений, получаем решение задачи. 7.3. Решение в тригонометрических рядах Рассмотрим функцию Y cos x , где Y − функция только координаты y ; n / l ; l − длина контура вдоль оси x . Четвертые производные этой функции будут такими: 4 4Y cos x ; 4 x 4 2Y II cos x ; 2 2 x y 4 Y IV cos x . 4 y Подставляя эти производные в уравнение (56), получаем 42 4Y cos x 2 2Y II cos x Y IV cos x 0 или Y IV 2 2Y II 4Y cos x 0 . (64) Так как это уравнение удовлетворяется при любых значениях x , то Y IV 2 2Y II 4Y 0 . Решение уравнения (65) запишем через гиперболические функции: Y Ach y Bych y Csh y Dysh y . Таким образом функция Ach y Bych y Csh y Dysh y cos x является бигармонической. Аналогично можно показать, что бигармонической является и функция A' ch y B' ych y C' sh y D' ysh y sin x . Тогда для решения плоской задачи можно принять функцию напряжений в виде тригонометрического ряда Anch n y Bn ych n y Cn sh n y Dn ysh n y cos n x n 1 (66) An ' ch n y Bn ' ych n y Cn ' sh n y Dn ' ysh n y sin n x . При использовании этого решения нагрузка на контуре также должна быть разложена в тригонометрический ряд. Значения постоянных An , Bn , C n , Dn , An ' , Bn ' , Cn ' , Dn ' находят из граничных условий. 7.4. Метод конечных разностей Метод конечных разностей (метод сеток) является эффективным средством приближенного решения дифференциальных уравнений. Его суть заключается в том, что непрерывная функция заменяется набором значений в фиксированных точках. При этом производные функции выражаются через разности значений функции в точках, благодаря чему дифференциальное уравнение заменяется системой линейных алгебраических уравнений. 43 Рассмотрим некоторую функцию одной переменной y x , график которой приведен на рис. 7. Рис. 7 Выберем на оси x точки, отстоящие друг от друга на равном расстоянии x h , называемом шагом. Тогда значение первой производной dy в точке dx i можно приближенно записать так: 1 dy yi 1 yi 1 . dx i 2h Применяя дважды выражение (67), можно (67) записать вторую производную: d2y d dy 1 dy 1 dy 2 2 yi 2 2 yi yi 2 . dx i dx dy i 2h dx i 1 dx i 1 4h Сокращая интервал в два раза, получаем: d2y 1 2 2 yi 1 2 yi yi 1 . dx i h (68) Аналогично, применяя дважды (68), запишем четвертую производную: d4y d2 d2y 1 4 2 2 4 yi 2 4i 1 6 yi 4 yi yi 2 . dx i dx dx i h 44 (69) Для плоской задачи дифференциальное уравнение записывается в частных производных. Разобьем область (рис. 8) сеткой на ячейки с одинаковыми размерами x y h . Рис. 8 Пронумеруем точки вокруг исследуемой точки 0 и запишем производные в этой точке, используя выражения (67), (68), (69): 1 1 3 ; x 2h 1 2 4 ; y 0 2h (70) 2 2 1 1 2 ; 2 ; 2 1 0 3 2 0 4 2 2 2 x 0 h y 0 h (71) 2 1 1 ; 6 8 10 12 2 xy 0 2h x 2 x 4 4h 45 4 1 4 4 7 4 2 60 4 4 11 ; y 0 h 4 2 2 2 1 2 2 2 2 2 2 2 x y h x x x 0 2 0 4 1 4 40 2 1 2 3 4 6 8 10 12 . h 4 1 4 4 5 41 60 43 9 ; x 0 h (72) Теперь, используя (72), можно записать бигармоническое уравнение (56) в конечных разностях. После сокращения на 1 оно принимает для h4 точки 0 такой вид: 200 8 1 2 3 4 2 6 8 10 12 (73) 5 7 9 11 0. Уравнения (73) могут быть записаны для каждой точки внутри контура. В них войдут также значения функции напряжений для точек на контуре и отстоящих на один шаг за контуром (штриховые линии на рис. 8). Значения функции на контуре и за контуром находят из граничных условий. В таком случае получают полную систему линейных алгебраических уравнений для определения значений в точках внутри контура. Для записи граничных условий проф. Л.П.Синицын предложил использовать балочную аналогию. Рассматривая верхнюю грань контура как балку, можно составить зависимость между изгибающим моментом и нагрузкой: d 2M q . dx 2 В то же время для напряжений y из граничного условия имеем: 46 2 y 2 q . x Сравнивая приведенные зависимости получаем: 2 d 2 M x 2 dx 2 или, после интегрирования M C1x C2 . Так как напряжения выражаются через вторые производные функции напряжений, то значения констант C1 и C 2 не сказываются на их величине и можно принять M . При этом, поскольку константы интегрирования в выражении момента зависят только от характера закреплений балки, последние можно принимать любыми. Как правило, удобно определять эти изгибающие моменты считая контур ремой с шарнирными соединениями стержней в узлах (рис. 9). Положительными при этом считаются моменты, растягивающие волокна стержней, расположенные внутри рамы. Рис. 9 Для определения значения в законтурной точке a (рис. 8) запишем ее производную для соответствующей точки b на контуре: 1 a c . y b 24 Отсюда получаем: 47 . y b a c 2h Значение производной на верхней грани получим из выражения y 2 xy . xy Действительно xy , x y откуда xy dx C . y При отсутствии касательной нагрузки на контуре производная y xy dx 0 и постоянна вдоль грани. Учитывая, что на левой вертикальной грани dM равно производной изгибающего момента y dy вертикального элемента рамы, получаем, что при x 0 dM Q . Эта y dy поперечная сила в вертикальном стержне рамы из равновесия узла равна продольной силе в горизонтальном стержне: Qверт. N гор. Тогда для прямоугольного контура при отсутствии касательной нагрузки получаем: a c 2hNb . (74) С учетом соответствия знаков между поперечными и продольными силами в узлах рамы, аналогичное соотношение справедливо для законтурных точек на других гранях. Например, на левой грани для т. k имеем: m 2hN l . x l K m 2h 48 После составления и решения системы уравнений вида (73) напряжения определяются по формулам (55), записанным в конечных разностях. Например, для точки 0 получаем: 1 y 2 1 20 3 ; h 1 xy 2 6 8 10 12 . 4h x Как уже 1 2 20 4 ; h2 указывалось, метод конечных (75) разностей является приближенным. Точность расчета повышается с уменьшением шага сетки. Метод дает возможность решать плоскую задачу при сложном очертании контура, а также при наличии вырезов внутри области. Вопросы для самоконтроля 1. Что такое функция Эри? 2. Из каких условий вводится функция напряжений? 3. К чему сводится решение плоской задачи при введении функции напряжений? 4. Как решается плоская задача в полиномах? 5. Какова минимальная степень полинома, применяемого для решения плоской задачи? 6. Как представляется функция напряжений при решении в при решении в тригонометрических рядах? 7. Как должна быть представлена нагрузка тригонометрических рядах? 8. Какова суть метода конечных разностей? 9. Сколько уравнений в конечных разностях должно быть записано для плоской задачи? 49 10.Как определяются значения функции напряжений на границе области? 11.То же за границей области? 12.От чего зависит точность решения плоской задачи методом конечных разностей? 50