Гречкосеев А. Использование ГЛОНАСС для навигационного обеспечения
реклама

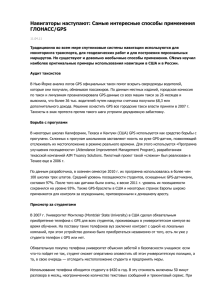
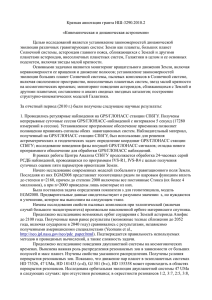
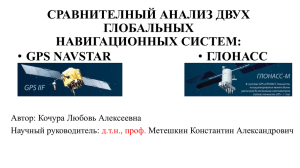
ОАО «Информационные спутниковые системы» им. академика М.Ф. Решетнева» А.К. Гречкосеев Новосибирск июнь 2014 Актуальность ГЛОНАСС для КА на ГСО и ВЭО Удержание КА в рабочей области ±0,1° (±0,05°) на длительных интервалах времени в автоматическом режиме Определение параметров движения КА на ГСО и ВЭО по сигналам ГЛОНАСС/GPS с погрешностями 100-500 м для решения различных целевых задач Синхронизация бортовых шкал КА на ГСО и ВЭО с погрешностями 300-1500 нс для решения различных целевых задач Снижение стоимости наземного комплекса управления Повышение надежности управления КА за счет снижения влияния «человеческого фактора» CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 2 2 Геостационарная орбита КА на высокоэллиптической орбите Орбита НКА ГЛОНАСС: 19100 км Низкая орбита: Высоты < 2000 км НКА ГЛОНАСС Основной лепесток навигационного сигнала ГЛОНАСС Зона за лимбом Земли CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 КА на геостационарной орбите 3 Основная проблема КА на ГСО Навигация в разрывном навигационном поле с пониженной мощностью сигналов ГЛОНАСС/GPS и малым кол-вом одновременно видимых КА чувствительность аппаратуры радионавигации (АРН) CSNC-2011 Conference May 2011 ICG-8 WG B новые алгоритмы навигационных определений Dubai, November 2013 Нет навигационн ого поля Нет навигационн ого поля Навигационн оe поле ГЛОНАСС/GPS ГЛОНАСС/GPS 4 4 Распределение числа радиовидимых НКА ГЛОНАСС и GPS на ГСО (реальные данные) CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 5 Алгоритмы навигационных определений Измеряемый параметр для уточнения орбиты - разность псевдодальностей между КА на ГСО и двумя навигационными КА на один момент времени. Исключается неопределенная на мерном интервале поправка к шкале времени КА на ГСО. Алгоритм оценивания для уточнения орбиты - обработка рекуррентным МНК в темпе поступления измерений, линеаризированная модель поправок к опорной орбите на основе аналитических частных производных, одна итерация, мерный интервал – 1 сутки. Бортовая модель движения КА численное интегрирование уравнений движения, учитывающих гравитационное притяжение Земли (до 4,4), Луны, Солнца, работу ДУ, световое давление. Измеряемый параметр для уточнения БШВ КА – разность измеренной псевдодальности и расчетной (по уточненной орбите) дальности. Алгоритм оценивания для уточнения БШВ – обработка рекуррентным фильтром Калмана в темпе поступления измерений, квадратичная модель ухода бортовых часов. CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 6 6 Аппаратура радионавигации (АРН ГСО) CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 7 7 Назначение аппаратуры радионавигации Измерение навигационных параметров (псевдодальности и псевдоскорости) по навигационным сигналам спутников ГЛОНАСС и GPS Прием от навигационных КА цифровой информации Формирование и выдача сигналов точного времени по шкале ГЛОНАСС и GPS Выдача в бортовую вычислительную машину КА измерений, цифровой информации, сигналов точного времени Задачи уточнения параметров орбиты и ухода бортовой шкалы от шкал времени ГЛОНАСС/GPS по измерениям АРН решаются в бортовом вычислительном комплексе КА CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 8 8 Практический опыт использования ГЛОНАСС и GPS для навигации российских КА на ГСО С 2008 г бортовая аппаратура радионавигации (АРН) успешно используется на борту эксплуатируемых КА производства ОАО «ИСС» на геостационарной орбите (три КА на ГСО) Подтверждена возможность приема, измерения сигналов ГЛОНАСС/GPS и определения параметров движения КА на ГСО Точность определения параметров движения КА на ГСО по сигналам ГЛОНАСС/GPS находится на уровне 300-400 м (апостериорные данные) На борту КА на ГСО реализована возможность автоматического удержания в орбитальной точке с требуемой точностью (±0,05°) без участия наземных средств управления Разработана бортовая АРН для метеорологического КА «Электро Л» CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 9 Погрешность определения координат геостационарного КА по измерениям ГЛОНАСС и GPS на борту КА производства ОАО «ИСС» на ГСО dR, м dL, м dN, м 350 300 250 Погрешность, м 200 150 100 50 0 -50 -100 05.03.10 06:00 05.03.10 09:00 CSNC-2011 Conference May 2011 ICG-8 WG B 05.03.10 12:00 05.03.10 15:00 05.03.10 18:00 Dubai, November 2013 05.03.10 21:00 Время 06.03.10 00:00 06.03.10 03:00 06.03.10 06:00 06.03.10 09:00 10 Использование ГЛОНАСС для навигации КА на ВЭО Разработана бортовая аппаратура радионавигации для установки на КА с орбитой типа «Молния» Для КА на ВЭО применяются две антенны: одна направлена в сторону Земли для работы в области апогея; другая – от Земли для работы в области перигея Точность определения параметров движения КА на ВЭО по сигналам ГЛОНАСС/GPS находится на уровне 200-300 м (априорные данные) CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 11 GLONASS Спасибо за внимание! CSNC-2011 Conference May 2011 ICG-8 WG B Dubai, November 2013 12