120101 Презентация ГНСС 2011
реклама

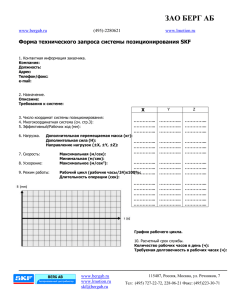
Государственное образовательное учреждение высшего и профессионального образования «СИБИРСКАЯ ГОСУДАРСТВЕННАЯ ГЕОДЕЗИЧЕСКАЯ АКАДЕМИЯ» ГОУВПО «СГГА» Геодезическое применение технологий ГНСС ст. преп. каф. ИГиИС, к.т.н. Е.К. Лагутина Программа курса • ВВЕДЕНИЕ: Глобальная навигационная спутниковая система. Структура системы. Типы спутниковой аппаратуры. Архитектура спутникового приемника. • ВИДЫ ИЗМЕРЕНИЙ ГНСС: Структура сигнала. Навигационное сообщение. Псевдодальности. Фазы. • МЕТОДЫ ПОЗИЦИОНИРОВАНИЯ: Абсолютный, дифференциальный, относительный методы позиционирования. Метод множественных опорных станций. Концепция виртуальной опорной станции. • ОШИБКИ НАБЛЮДЕНИЙ: Виды ошибок и величина их влияния. Способы ослабления действия ошибок наблюдений. Демозаочного обучения нстрационный материал для 2 Программа курса • ПРОЕКТИРОВАНИЕ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ • МЕТОДИКА СПУТНИКОВЫХ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ: Режимы статики и быстрой статики. Режимы кинематики Stop&Go и непрерывной кинематики. Способы инициализации. Съемки в реальном времени. Определение элементов приведения. Полевые контроли. • МАТЕМАТИЧЕСКАЯ ОБРАБОТКА РЕЗУЛЬТАТОВ СПУТНИКОВЫХ НАБЛЮДЕНИЙ: Общий порядок обработки. Процессор вычисления базовых линий. Критерии оценки качества решения. Уравнивание геодезической сети. Критерии состоятельности уравнивания. Демозаочного обучения •нстрационный ПРЕОБРАЗОВАНИЕ ПЛАНОВЫХ И ВЫСОТНЫХ 3 материал для Тема 1: Ведение. Общие понятия о ГНСС 4 Глобальная навигационная спутниковая система • комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов. • система радионавигационных искусственных спутников Земли, службы контроля и управления и приёмников спутниковых радиосигналов, обеспечивающая координатно-временные определения на земной поверхности и в околоземном пространстве. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 5 Структура ГНСС • Подсистема космических аппаратов; • Подсистемы контроля и управления; • Подсистема пользователей. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 6 Структура глобальных навигационных спутниковых систем • Подсистема космических аппаратов – часть ГНСС состоящая из созвездия навигационных спутников • Подсистемы контроля и управления; • Подсистема пользователей. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 7 Структура глобальных навигационных спутниковых систем • Подсистема космических аппаратов: • прием и хранение данных, передаваемых контрольным сегментом, • поддержание точного времени посредством нескольких бортовых атомных стандартов частоты, • передача информации и сигналов пользователю. • Подсистемы контроля и управления; • Подсистема пользователей. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 8 Подсистема космических аппаратов: GPS Название блока Количество Первый запуск Масса (кг) Мощность солнечных батарей (W) Проектный срок работы (лет) Стоимость, млн. $ IIA IIR/IIR-M IIF 11 20 1 1989 1997 2005 900 1100 1700 1100 1700 2900 7.5 10 15 43 30 28 Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 9 Подсистема космических аппаратов: GPS Параметр Значение Большая полуось орбиты, км 26560 Наклонение орбиты 55 Средняя высота над земной поверхностью, км 20182 Период обращения 11:57:58 Скорость полета по орбите 3.874 км/с Максимальное пребывание в зоне видимости 4.1 часа Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 10 Подсистема космических аппаратов: ГЛОНАСС Название блока Ураган Ураган-М Ураган-K 24 12 20* 1995 2001 2005 Масса (кг) - 1400 - Мощность солнечных батарей (W) - 1600 - 4-6 7 - - Количество Первый запуск Проектный срок работы (лет) Стоимость Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 11 Подсистема космических аппаратов: ГЛОНАСС Программа повышения квалификации руководящих работников Параметр Значение Большая полуось орбиты, км 25510 Наклонение орбиты 65 Средняя высота над земной поверхностью, км 19132 Период обращения 11:15:44 Скорость полета по орбите 3.874 км/с Максимальное пребывание в зоне видимости, ч 5.5 Блок лекций 3: Системы глобального позиционирования 12 Сравнительные характеристики систем ПАРАМЕТРЫ Число спутников всего/работает Число орбитальных плоскостей Способ разделения сигналов Несущая частота: L1, МГц L2, МГц Система координат Тип эфемерид Программа повышения квалификации руководящих работников ГЛОНАСС GPS 31/24 31/30 3 6 частотный кодовый 1602,6-1615,5 1246,4-1256,5 ПЗ-90 Геоцентрические координаты и их производные 1575,4 1227,6 WGS-84 (МГС-84) Модифицированные Кеплеровы элементы Блок лекций 3: Системы глобального позиционирования 13 Структура ГНСС • Подсистема космических аппаратов; • Подсистемы контроля и управления – часть ГНСС, состоящая из расположенной на земле сети наземных станций, выполняющих непрерывные наблюдения всех спутников созвездия, передающая им обновленную информацию и управляющая их полетом • Подсистема пользователей. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 14 Структура ГНСС • Подсистема космических аппаратов; • Подсистемы контроля и управления: • • • • • отслеживание орбит спутников, контроль рабочего состояния спутников, формирование системного времени, расчет эфемерид спутников и параметров часов, обновление спутниковых навигационных сообщений, • осуществление небольших маневров спутников для поддержания орбит (по мере необходимости). • Подсистема пользователей. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 15 Подсистема контроля и управления: GPS Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 16 Подсистема контроля и управления: ГЛОНАСС Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 17 Структура ГНСС • Подсистема космических аппаратов; • Подсистемы контроля и управления; • Подсистема пользователей – часть ГНСС − спутниковые приемники, обеспечивающие прием навигационных сигналов для наземных, морских, авиационных и космических пользователей Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 18 Структура ГНСС • Подсистема космических аппаратов; • Подсистемы контроля и управления; • Подсистема пользователей: – Аппаратура пользователей; – Информационно-технические службы. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 19 Аппаратура пользователей Спутниковый приемник – радиоприёмное устройство для определения координат текущего местоположения антенны, на основе данных о временных задержках прихода радиосигналов, излучаемых спутниками ГНСС. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 20 Классификация спутниковых приемников • Вид сигнала: – кодовые – приемник, требующий знания, по крайней мере, одного системного кода для измерения псевдодальностей и декодировании навигационных данных. – фазовые – приемники определяют положение путем обработки измерений фазы несущей волны, наблюдаемой в течение некоторого времени. • По количеству частот можно выделить: – одночастотный – приемник, принимающий сигналы лишь на одной из нескольких частот, излучаемых спутниками ГНСС; – многочастотные – приемник, принимающий сигналы нескольких частот, излучаемых спутниками ГНСС; • По количеству используемых систем: – односистемные – поддерживают только одну ГНСС; – многосистемные – принимают сигналы двух и более ГНСС; Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 21 Классификация спутниковых приемников • По виду работ или достигаемой точности: – навигационные – порядка 10-15 м в лучшем случае, а обычно 50-100 м и грубее; – навигационно-топографические – от 10 м до 1 дм при расстояниях до 50 - 500 км; – геодезические – 3-5 мм + 1мм/км; – приемники для определения и хранения времени –5-10 нс. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 22 Информационное обеспечение ГНСС • Международная служба вращения Земли (МСВЗ) • Международная ГНСС Служба (IGS) • Информационная система данных о динамике земной коры (CDDIS) • Национальные активные контрольные сети (CORS, CACS, Geosciences Australia и т.д.) Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 23 Глобальная сеть IGS Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 24 Продукты IGS Вид информации Задержка в получении данных Эфемериды спутников GPS (см) Поправки часов спутников GPS (нс) Координаты полюса (0.001) Продолжительность суток (мкс/сут.) Координаты станций (в плане/по высоте, мм) Скорости движения станций (в плане/по высоте, мм/год) Тропосферная зенитная задержка (мм) Программа повышения квалификации руководящих работников Быстрые (прогноз.) Реальное время 10 5 Быстрые (вычисл.) 3 часа Срочные данные 17 часов Окончат. данные 13 суток 5 0.2 <5 0.1 <5 <0.1 0.3 0.06 0.1 0.03 <0.1 0.03 0.05 <0.02 - - - 3/6 - - - 2/3 - 6 - 4 Блок лекций 3: Системы глобального позиционирования 25 Информационные ресурсы CDDIS http://www.cddisa.gsfc.nasa.gov Файлы наблюдений ftp://cddis.gsfc.nasa.gov/gps/data/ МГС Точные орбиты МГС ftp://cddis.gsfc.nasa.gov/gps/products/ Координаты ITRF http://sideshow.jpl.nasa.gov/mbh/all/table2.txt NGS (информация по www.ngs.noaa.gov/ANTCAL/index.shtml GPS антеннам) Geo++(информация http://www.geopp.com/gnpcvdb/AOA_DM_T/ по GPS антеннам) general.html Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 26 Тема 2: ВИДЫ ИЗМЕРЕНИЙ ГНСС 27 Физические принципы измерений Спутниковые методы определения координат измеряют линейные величины – расстояния между объектами и разности этих расстояний. При измерениях вдоль дистанции распространяется электромагнитный сигнал. Измеряемой величиной является время распространения электромагнитной волны вдоль дистанции, или разность фаз двух колебаний. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 28 Структура сигнала GPS Формирование сигнала на спутнике начинается в квантовом генераторе частоты, так называемых атомных часах, которые формируют основную частоту - электромагнитное колебание, которое может быть охарактеризовано четырьмя параметрами: амплитудой, частотой, фазой и поляризацией. Если один из этих параметров изменяется некоторым контролируемым способом (т.е. модулируется) для передачи информации, тогда сигнал становится сообщением. Основная частота модулируются по фазе бинарными кодами. Каждый код является последовательностью бинарных цифр или чипов, которые повторяются с определенным интервалом. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 29 Структура сигнала GPS Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 30 Навигационное сообщение Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 31 Типы сигналов ГНСС GPS Характеристика несущей волны длина , см частота f, МГц L1 L2 Дальномерные коды 19 24 C/A – «грубый» 300 1575.42 1227.60 Р – «точный» 30 Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования длина чипа, м 32 Основные виды спутниковых наблюдений Универсальное обозначение для разных видов наблюдений: • Фазовая дальность L1 • Фазовая дальность L2 • C/A-кодовая дальность на L1 – C1 • P-кодовая дальность на L1 – P1 L2 – P2 Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 33 Тема 3: МЕТОДЫ ПОЗИЦИОНИРОВАНИЯ 34 Уравнение измерений k k k ~ i i b bi trop. iono. noise ~k k k i i b bi N trop. iono. noise Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 35 Основное уравнение космической геодезии Z измеренная Спутник Пункт определяемая известная r r=R+ρ R Геоцентр O R=r– Y X Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 36 Режим позиционирования Позиционирование – определение пространственного положения объектов: – абсолютное – по отношению к системе координат, начало которой однозначно определено и в общем случае недоступно. – относительное – по отношению к другой точке, принимаемой за начало некоторой местной системы координат. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 37 Абсолютный режим получение координат в общеземной геоцентрической системе по кодовым измерениям псевдодальностей до спутников с точностью не выше первых метров Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 38 Относительный режим определение разности координат между пунктами из синхронных измерений (как кодовых, так и фазовых) Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 39 Дифференциальный режим измерения, основанные на введение дифференциальных поправок, определяемых базовой станцией, в результаты измерений, выполненных на перемещаемых приемниках Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 40 Множественные опорные станции Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 41 Множественные опорные станции • сеть активных базовых станций (сети АБС) • вычислительный центр (ВЦ) • линии связи Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 42 Сеть активных базовых станций НСО Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 43 Концепция виртуальной базовой станции VRS (Virtual Reference Station) Разработан конце 90-х годов компанией Terrasat (Германия). Программное обеспечение центра управления сетью, на основании полученных от ровера предварительных координат, вычисляет дифференциальные поправки относительно произвольной точки, симулируемой вблизи ровера. Эти поправки могут быть посланы в сообщениях 20, 21 формата RTCM, либо в собственных форматах производителя спутникового оборудования. Каждый ровер получает индивидуальные поправки вычисляет уточточненные координаты своего местоположения по технологии одиночной базовой станции. 44 Концепция виртуальной базовой станции 45 Тема 4: ОШИБКИ НАБЛЮДЕНИЙ 46 Коэффициенты понижения точности Конфигурация спутников, т.е. их взаимное расположение в определенный момент времени над определённым пунктом наблюдений, влияет на точность определения местоположения Это влияние принято оценивать с помощью параметров, называемых коэффициентами понижения точности: – HDOP (Horizontal Dilution of Precision) — в горизонтальной плоскости – VDOP (Vertical) — в вертикальной плоскости – PDOP (Position) — по местоположению – TDOP (Time) — по времени – GDOP (Geometric) - геометрическое снижение точности Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 47 Коэффициенты понижения точности Q X ( A T A) 1 q11 q12 q 21 q 22 q31 q32 q 41 q 42 q13 q14 q 23 q 24 q33 q34 q 43 q 44 X 0 q11 , Y 0 q22 , Z 0 q33 , dt PDOP q11 q 22 q33 Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 0 c q44 48 Коэффициенты понижения точности VDOP q33 q 22 HDOP q11 Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 49 Погрешности СРНС: В ГЛОНАСС/GPS технологиях можно выделить четыре основных источника ошибок: – ошибки аппаратуры; – влияние внешних условий по трассе распространения сигнала; – ошибки наблюдателя; – ошибки математической обработки. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 50 Погрешности СРНС: ошибки аппаратуры • Шум сигнала: – 3 м для С/А-кода – 0.3 м для P-кода – 2 мм для фазы несущей; • Положение фазового центра антенны – несколько сантиметров для разнотипных антенн; • Ошибки часов приемника и спутника; Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 51 Погрешности СРНС: влияние среды распространения сигнала • Ионосфера • Тропосфера • Многопутность Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 52 Погрешности СРНС: ошибки наблюдателя • Неверное измерение высоты антенны; • Ошибки центрирования. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 53 Ошибки позиционирования по кодовым наблюдениям Абсолютный Источники ошибок Дифференциальный C/A -код P-код C/A -код P-код Ошибки часов спутника, м 3.0 3.0 0 0 Ошибки эфемерид, м 2.0 2.0 0 0 Ионосферная задержка, м 3.5 2.3 0.1 0.1 Тропосферная задержка, м 0.4 0.4 0.1 0.1 Шумы в приемнике, м 1.5 0.2 1.5 0.25 Межканальные сдвиги в приемнике, м 0.6 0.15 0.6 0.15 Многопутность, м 1.2 1.2 1.2 1.2 Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 54 Ошибки позиционирования по фазовым наблюдениям Источники ошибок Относительный L1 L2 Ошибки часов спутника - Ошибки эфемерид - Ионосферная задержка 1-3 см Тропосферная задержка 2 мм Шумы в приемнике 2 мм Многопутность Программа повышения квалификации руководящих работников 5 см Блок лекций 3: Системы глобального позиционирования 6 см 55 Точность методов позиционирования Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 56 Тема 5: ПРОЕКТИРОВАНИЕ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ 57 Геодезическое использование ГНСС 1. Составление проекта геодезических работ на объекте. 2. Получение разрешений для работы на режимных или частных территориях и на работу радиостанции. 3. Полевая рекогносцировка, в результате которой делаются заключения об объекте, технологии работ и особенностях материально-технического обеспечения съемки. В итоге составляется проект полевых работ, и подготавливаются необходимый картографический материал. 4. Закладка центров. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 58 Геодезическое использование ГНСС 5. Организация базовой станции (если этого требует технология). 6. Планирование сеансов наблюдений, которое включает в себя определение оптимальных временных интервалов измерений, проектирование последовательности сеансов или маршрутов обхода объектов съемки. 7. Составление словаря данных, необходимого для описания объектов данного вида топографических или ГИС съемок. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 59 Геодезическое использование ГНСС 8. Полевые измерения (съемка объектов). 9. Камеральная обработка, вывод результатов измерений. 10. Составление технического отчета и оформление необходимой документации. 11. Полевой контроль, архивирование и сдача материалов. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 60 Тема 6: МЕТОДИКА СПУТНИКОВЫХ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ 61 Методика измерений • Реальное время • Пост-обработка • Статический – Классическая статика – Быстрая статика • Кинематический – Непрерывная кинематика – «Стой-иди» Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 62 Классическая статика При статической съемке антенна устанавливается над точкой на штативе или другой неподвижной подставке. Используются не менее двух приемников: один на точке с известными координатами, а другой – на точке, координаты которой надо определить. Наблюдения проводятся синхронно с одинаковыми интервалами записи наблюдений (30 секунд) и при наличии, по крайней мере, четырех «общих» спутниках. Метод требует наибольшего времени наблюдений. Продолжительность сеанса наблюдений варьируется в зависимости от условий окружающей среды и длины базовой линии. 63 Быстрая статика Вариация метода классической статики, разработанная для измерения коротких базовых линий (10-12 км). Временя синхронных наблюдений составляет около 20 минут и периоде сбора данных 15 секунд. Продолжительность сеанса может варьироваться в зависимости от количества отслеживаемых спутников, значения DOP (геометрического фактора ухудшения точности), наличия или отсутствия пропусков циклов, влияния многолучевости и т.д. Благодаря укороченному времени сеанса, эффективность работ возрастает, но объем полученных данных меньше и надежность результатов измерений может оказаться ниже. Для увеличения точности получаемых данных используйте программное обеспечение для планирования работ, чтобы гарантировать достаточное количество спутников и хорошее значение DOP, а также другие оптимальные условия на период измерений. 64 Непрерывная кинематика Требует не менее двух приемников, один из которых работает в качестве базовой станции. Другой приемник установлен на подвижном основании и проводит набор полевых данных при помощи антенны, закрепленной на вешке или другом подвижном носителе. Представляет собой метод безостановочной геодезической съемки и используется для достижения последовательного, высокоточного определения точек траектории движущегося тела и т.д. При этом методе аналитические результаты получаются для каждого интервала времени эпохи. 65 Кинематика «Стой – Иди» При этом методе подвижный приемник выполнят предельно короткие статические измерения (при остановке) и непрерывные кинематические измерения в процессе движения. Как правило, время стояния на точке длится порядка одной минуты и содержит 12 эпох по пять секунд каждая. Чем больше время статического отрезка, тем выше будет точность полученных данных. Метод требует непрерывного потока данных, поэтому необходимо контролировать непрерывное слежение за спутниками в процессе движения. Соответственно стремиться к наиболее благоприятным условиям наблюдений. 66 Кинематика в реальном времени (RTK) При съемке в режиме RTK так же, как и при кинематической съемке, один приемник служит в качестве базовой станции и осуществляет наблюдения с антенной, закрепленной на штативе или другой неподвижной подставке. Другой же приемник работает на подвижном основании и проводит измерения с антенной на вешке и перемещаемой по определяемым точкам. Базовая станция и подвижный приемник, связаны при помощи системы связи. Данные коррекции по фазе несущей и другие данные, получаемые на базовой станции, передаются на подвижный приемник через модем. Благодаря этим передаваемым данным и собственным измерениям, на подвижном приемнике немедленно проводится анализ данных по базовой линии, и сразу выдаются результаты вычислений. 67 Тема 7: МАТЕМАТИЧЕСКАЯ ОБРАБОТКА РЕЗУЛЬТАТОВ СПУТНИКОВЫХ НАБЛЮДЕНИЙ 68 Общий порядок математической обработки 1. Создание и настройка проекта; 2. Импортирование результатов полевых наблюдений и их контроль; 3. Формирование сети из потенциальных векторов; 4. Вычисление векторов базовых линий; 5. Контроль невязок в замкнутых полигонах; 6. Уравнивание сети. Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 69 Процессор вычисления базовых линий 1) определение координат конца базовой линии абсолютным методом; 2) решение по тройным разностям, которое обеспечивает умеренную точность, но высокий уровень надежности из-за его нечувствительности к потерям счета циклов; 3) выявление потерь счета циклов и восстановление отсчетов; 4) решение по двойным разностям с вещественными неоднозначностями (плавающее решение); 5) поиск целых неоднозначностей (разрешение неоднозначностей); 6) решение по двойным разностям с целыми неоднозначностями (фиксированное решение). Программа повышения квалификации руководящих работников Блок лекций 3: Системы глобального позиционирования 70 Критерии оценки качества решения • разрешение неоднозначности по всем линиям сети (получение фиксированного решения); • оценка точности по внутренней сходимости результатов обработки (Ratio и Reference Variance) – Ratio - отношение дисперсии второго претендента на решение к дисперсии первого претендента на решение то есть к наименьшей 22 из всех дисперсий: Ratio 2 1 – Reference Variance - проверяет2 соответствие апостериорной и априорной дисперсий: RV a posteriori a2 priori • невязка по замкнутым построениям в сети: wX X , wY Y , wZ Z k k Программа повышения квалификации руководящих работников k w wX2 wY2 wZ2 Блок лекций 3: Системы глобального позиционирования 71 Уравнивание геодезических сетей Цель уравнивания – повышение точности и представление результатов в необходимой системе координат с оценкой точности. Дополнительными исходными данными для уравнивания СГС являются: • координаты опорных пунктов в геоцентрической системе WGS-84, ПЗ- 90 или ITRF с необходимой точностью; • координаты (плановые и высотные) опорных пунктов в новой системе при переводе пространственных координат. Задачи уравнивания • согласование совокупности всех измерений в сети; • минимизация и фильтрация случайных ошибок измерений; • выявление и отбраковка грубых измерений, исключение систематических ошибок; • получение набора уравненных координат и соответствующих им элементов базовых линий с оценкой точности в виде ошибок или ковариационных матриц; • трансформирование координат в требуемую координатную систему; • преобразование геодезических высот в нормальные высоты. 73 Виды уравнивания • В свободном уравнивании неизвестными считаются все пункты сети, и положение сети относительно геоцентра известно с той же точностью, что и координаты начальной точки сети. • При фиксировании координат одного пункта получаем минимально ограниченное уравнивание, в котором нормальная матрица оказывается невырожденной. Для достижения значимого контроля векторная сеть не должна содержать незамкнутых геометрических фигур. • При фиксировании более чем трех координат будет ограниченное уравнивание в том смысле, что будут наложены дополнительные ограничения по 74 Анализ результатов уравнивания сети В высокоточных спутниковых измерениях отношение апостериорной и априорной дисперсий должно быть меньше или равно 1. Когда отношение меньше 1, то это говорит о том, что предсказанные ошибки были преувеличены, и, что на самом деле точность выше, чем ожидалось. Когда отношение больше 1, то возможно, что одна или несколько предсказанных ошибок были недооценены, то есть реальные ошибки оказались больше предсказанных. 75 Анализ результатов уравнивания сети • Тест 2 - основан на сумме взвешенных квадратов поправок v, числе степеней свободы r и уровне доверия (проценте вероятности). Назначение этого теста – отвергнуть или принять гипотезу о том, что предсказанные ошибки были точно оценены. Если тест не проходит, то это указывает на то, что все или несколько наблюдений необходимо проверить или даже наблюдать повторно. 76