СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ С
реклама

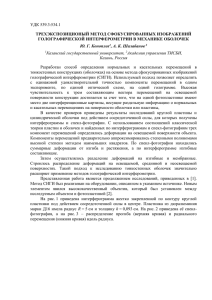
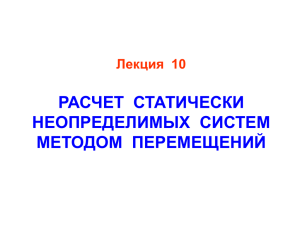
СТРОИТЕЛЬНАЯ МЕХАНИКА Часть ii СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ Расчёт деформируемых систем методом перемещений 4 П л а н - а л г о р и т м расчёта деформируемой системы методом перемещений С о д е р ж а н и е Этап (шаг) 1. Выявление степени кинематической неопределимости 2. Выбор основной системы метода перемещений (ОСМП) Назначение расчётных узлов; определение nk = nq + nD ( nq = 3 nж.у. – для плоской системы; nD – с помощью шарнирной системы ( Ш.С. ) : nD = Wш.с. ) Введение угловых связей в жёсткие расчётные узлы и линейных связей по направлениям принимаемых за основные неизвестные линейных перемещений расчётных узлов. Номинация основных неизвестных Z 3. Запись канонических уравнений метода перемещений (КУМП) Условия статической эквивалентности РС и ОСМП: Ri = 0, i = 1, …, n Матричная форма n Обычная форма 4. Единичные Определение деформаций элементов ОСМП (с учётом условий совместности) и внутренних силовых факторов Sk Mk , Qk , Nk oт Zk = 1, k = 1, …, n состояния ОСМП r k =1 ik Z k RiΣ = 0, i =1, n r Z RΣ = 0 Вычисление единичных реакций rik (с использованием табличных данных) 5. Вычисление коэффициентов КУМП 6. Действительное состояние ОСМП 7. Вычисление свободных членов КУМП а) статическим способом; б) кинематическим способом: R j, i R j, k Si Sk ds j , i,k = 1, n Cj по S j =1 l j C S j =1 m rik = u rik = aiт Sk = aiт Kak r = aт S0 = aт Ka или rik =WkiК Определение внутренних силовых факторов S M , Q , N от заданных воздействий (с использованием табличных данных) Вычисление реакций Ri от силовых, температурных и кинематич. воздействий а) статическим способом; б) кинематическим способом: Ri Σ =W ΣKi W Fiu Ri Σ = a iт S Σ ciт Fu RΣ = a т S Σ c т Fu П л а н - а л г о р и т м расчёта деформируемой системы методом перемещений С о д е р ж а н и е Этап (шаг) Суммарное единичное состояние ОСМП – от одновременных смещений введенных связей Z1 = 1, Z2 = 1, …, Zn=1; определение суммарных единичных ВСФ S s M s , Qs , N s Проверка коэффициентов канонических уравнений МП: а) универсальная проверка коэффициентов обычная форма u R2 n n S s2 j, s rss = ds j = (?) = rik по S j =1 l j C s j =1 C j i =1 k =1 m 8. Проверки коэффициентов и свободных членов КУМП матричная форма n n rss = a Ss = a Kas = (?) = rik т s т s i =1 k =1 б) построчная проверка коэффициентов (при отрицательном результате универсальной проверки) u R R n S S j, i j, s ris = i s ds j = (?) = rik ( i = 1, n) ris = aiт Ss = aiт Kas = (?) = Cj по S j =1 l j C s j =1 k =1 m n r k =1 ik Проверка свободных членов канонических уравнений МП: m u R R0 S s S F0 j, F j, s RsΣ = ds j по S j=1 l C s C j j = 1 j m n r S s ε s,t ds j R( j ) , s Δ( j ) = (?) = Ri Σ по S j =1 l j j =1 i =1 9. Определение основных неизвестных Z (решение КУМП) Det ( rk ) , k = 1, n ; Det ( r ) r11 r1 , k 1 ( R1Σ ) r1 , k 1 r1n Det ( rk ) = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . rn1 rn, k 1 ( RnΣ ) rn, k 1 rnn n RsΣ = a S Σ c Fu = (?) = Ri Σ т s т s Zk = Z = r R i =1 П л а н - а л г о р и т м расчёта деформируемой системы методом перемещений С о д е р ж а н и е Этап (шаг) a) S = S 0 Z S = n = S S (a т S 0 ) 1 (a т S c т Fu ) = 0 S = Sk Zk S ( S M , Q , N ) 10. Вычисление = S Ka (a т Ka ) 1 (a т S c т Fu ) k =1 искомых ~ = S~ Z S~ = n б) S 0 усилий ~ ~ M = M Z M Q = dM / ds N т 1 т = S S (a S ) (a S c т F ) = k k 0 0 u k =1 ~ ~ = S S 0 (a т Ka ) 1 (a т S c т Fu ) а) системы в целом; б) узлов; в) выделенных частей К и н е м а т и ч е с к а я ( деформационная ) п р о в е р к а – для СНС Статическая проверка (проверка равновесия) а) о б щ а я u R0 R S s0 S j, s j D s = D i = ds j C C s j i =1 по S j =1 l j j =1 n 11. Проверки результатов расчёта m m r S s,t ds j R(0j ) , s D ( j ) = 0 (?) 0 s по S j =1 l j j =1 S D s = L B0 T = 0 (?) Δ (c ) S т D = L0 B0 T = 0 (?) Δ ( c ) т 0,s б) ч а с т н ы е u R0 R S i0 S j, i j D i = ds j S C C s j по S j =1 l j j =1 ( i =1, n) D i = Lт0 , i B0 T = 0 (?) m r Δ 0 0 (c ) S i s,t ds j R( j ) , i D ( j ) = 0 (?) m по S j =1 l j j =1 Пример 4м F = 40 кН q = 15 кН/м 3EI Z1= 1 EI 1 2 F e2 1 Z1 2 Тип 2 i1 = 1,2i0 i2 = 2i0 i3 = i0 Z2 b2 2 b3 Тип 1 l lj * j D2,1 r11 k=1 e3 Канонические уравнения: r12= r21= – i0 r22= 10 i0 3i2= 6i0 4i3= 4i0 M2 2i3= 2i0 Грузовое состояние ОСМП F R1F 3 Fl = 45 16 2 R2F q 37,5 F Z1 = –16,667/i0 ; Z2 = –4,167/i0 M = M1Z1 + M2Z2 + MF r12 k = 2 6i3D3,1/l3= 2i0 r11 Z1 r12 Z 2 R1 F = 0, r Z r Z R = 0. 2F 21 1 22 2 1,9i0 Z1 – i0 Z2 + 27,5 = 0, – i0 Z1 + 10i0 Z2 + 25 = 0. r22 3i2D2,1/l2= i0 M1 3i1D1,1/l1= 1,2i0 r11 = W = = Qe1,1Δ1,1 Qe 2,1Δ2,1 D3,1 Qb3,1Δ3,1 = = 1,9 i0 Z2= 1 K 11 r21= – i0 D1,1= 5/3 D2,1= 1 D3,1= 4/3 q 3 1 Тип 2 r21 D1,1 3 3 3 nk = nq + nD = 1 + 1 = 2 ОСМП Единичные состояния основной системы R1F = 27,5 кН; R2F = 25 кН*м MF (кН*м) ql 32 = 20 12 Пример 4м F = 40 кН q = 15 кН/м 3EI Z1= 1 EI 3 3 3 nk = nq + nD = 1 + 1 = 2 ОСМП 1 2 F e2 1 Z1 2 Тип 2 Z2 b2 2 b3 i1 = 1,2i0 i2 = 2i0 i3 = i0 l lj D2,1 r11 k=1 r12 k = 2 3i2= 6i0 r12= r21= – i0 r22= 10 i0 4i3= 4i0 M2 6i3D3,1/l3= 2i0 2i3= 2i0 Грузовое состояние ОСМП 3,333 58,333 5,833 20 r22 3i2D2,1/l2= i0 M1 3i1D1,1/l1= 1,2i0 e3 r11 = W = = Qe1,1Δ1,1 Qe 2,1Δ2,1 D3,1 Qb3,1Δ3,1 = = 1,9 i0 M F 45 R1F 3 Fl = 45 16 2 R2F q 37,5 F (кН*м) M = M1Z1 + M2Z2 + MF Z2= 1 K 11 r21= – i0 D1,1= 5/3 D2,1= 1 D3,1= 4/3 q Тип 1 * j r21 D1,1 3 1 Тип 2 Единичные состояния основной системы R1F = 27,5 кН; R2F = 25 кН*м MF (кН*м) ql 32 = 20 12 ОСОБЕННОСТИ РАСЧЁТА ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Особенности, обусловленные видом воздействия Особенности, связанные с типом рассчитываемой системы (характером работы элементов) ОСОБЕННОСТИ РАСЧЁТА ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ а) обусловленные видом воздействия Инвариант – матрица внешней жёсткости ОСМП Вид воздействия Силовое (F) Температурное (t) Кинематическое (с) Канонические уравнения Свободные члены КУМС r = aт Ka ( K ~ i0 r ~ C0 ) C0 = EI0 EA0 Основные неизвестные Искомые усилия Кинематическая проверка Z = r 1 R F = S = S 0 Z S F = RF = = ( ~ C 0 ) 1 = (~ C 0 )ζ C 01 т т т Δ = L BS =0 = a S c F = r Z RF = 0 F u inv (C 0 ) = inv (C 0 ) = = inv (C 0) = ζ C 01 = inv S (C 0 ) r Z Rt = 0 r Z Rс = 0 Rt = aт St Rt ~ C0 Rc = aт Sc Rc ~ C0 Z = r 1 R t = S = S 0 Z S t = т 1 Δ = L BS = (~ C0 ) = (~ C 0 )inv (C 0 ) т L t Bt T = (~ C0) = (~ C 0 ) = =0 = (~ C 0 ) = inv (C0 ) Z = r 1 R c = S = S 0 Z S c = т = (~ C0 )1 = (~ C0 )inv (C 0 ) Δ =т L B S (~ C0) = (~ C 0 ) = RΔ(E )Δ(c) = =0 = inv (C0 ) = (~ C 0 ) ОСОБЕННОСТИ РАСЧЁТА ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ а) обусловленные видом воздействия Приведение заданных воздействий к расчётным узловым нагрузкам Dt ОСМП Только узловые нагрузки Dt 3 F1 ОСМП t Расчётные узловые нагрузки Fy,3 y Fy,1 RF = – RF = – Fu r * Z = Fu RF,t (3) Mt cтFu q F2 F1 M D(2) (общий случай работы элементов) SF = 0 H M 2 1 F2 q Концевые усилия F2 H0 F2 4 5 RF,t (1) Fx,3 3 M3 1 Fy,t Fx,t RF,t (2) RF,t = – Fu,t S = Ka* (aтKa)– 1F u M1 Fx,1 Fy,2 5 Fx,5 M4 2 Fy,5 Fx,2 M2 l/2 l/2 D(1) Fy,4 a a D(1) 1,5 EIрa * Dtnr / h 4 Fx,4 F2 l / 8 3EIc Δ(1) (H H 0 2 qH2/12 M x Fx,1= F1+ qH/2; Fy,1= – F2/2; M1= F2l /8 – qH2/12 Fx,2= 0; Fy,2= –F2/2; M2= M – F2l /8 Fx,3= –EAрa * Dt0; Fy,3= –1,5 EIpa * Dtnr /(ha); M3= 1,5 EIpa * Dtnr /h 0 Fx,4= EAрa * Dt0 + 3EIcD(1)/(H+H0)3; Fy,4= –1,5 EIpa * Dtnr /(ha) – EA–1 cD(1)/(H+H ); тKa) S = Ka * (a F + S u nr /(ha) M4 = –1,5 EIpa * Dtnr /h – 3EIc D(1)/(H+H0)2 Fx,5= 0; Fy,5= 2* 1,5 EIpa * Dt ОСОБЕННОСТИ РАСЧЁТА ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ б) обусловленные типом системы (характером работы элементов) Балки – на податливых (деформируемых) опорах … Фермы nk = 2У 3У – nж.о.с.– для плоской пространственной фермы ж.о.с. – жёсткие опорные связи – на жёстких (недеформируемых) опорах … Элементы – 1-го и 2-го типов r = aт S0 θт M0 = θт K M θ θт MF θтuMu – при силовых воздействиях – при изменениях температуры RΣ = qт Mt – при заданных смещениях связей a т Sс (a θ ,v ; Sc Mc , Qc ) M = MΣ KMθ (θт KMθ)1RΣ При отсутствии смещений связей: M = MΣ K Mθ (θт K Mθ)1 (θт MΣ θтu Mu) Для элемента 1-го типа: Для элемента 2-го типа: θ M 4i 2i a = [θbj] ; M j,Σ = [Mbj,Σ] ; a j = bj ; M j,Σ = bj,Σ ; K Mj = j j j K Mj = [3i j] θej Mej,Σ 2i j 4i j Все элементы – 3-го типа r = aт S0 (Δl )т N0 = (Δl )т K N Δl т c Fu RΣ = (Dl )т Nt (Dl )т Nс – при силовых воздействиях – при изменениях температуры – при заданных смещениях связей Nj,t = – EAj aj Dt0j ; Nc = KN * Dlc N = N Σ K N Δl [(Δl )т K N Δl ] 1 RΣ Для элемента 3-го типа: K N j = [ EA j /l j ] ОСОБЕННОСТИ РАСЧЁТА ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ б) обусловленные типом системы (характером работы элементов) Р а м ы – при использовании гипотезы – при изменении температуры l j l *j – при смещениях связей D(c) Dt Dt = Dtnr + Dt0 D(c) = q D Dtnr Dt0 D(1) D(2) Mt0 Mt = Mtnr + Mt0 Rt Z M S Q N D(1) D(2) Mq MD Mc = Mq + MD Rc D(4) D q D(5) Mtnr D(3) Z M S Q N D(5) D(3) D(4) ИСПОЛЬЗОВАНИЕ ГРУППОВЫХ ОСНОВНЫХ НЕИЗВЕСТНЫХ (ЛИНЕЙНЫХ ПРЕОБРАЗОВАНИЙ НЕИЗВЕСТНЫХ) В РАСЧЁТАХ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Групповыми основными неизвестными метода перемещений называются линейные комбинации перемещений расчётных узлов – группы углов поворота и линейных перемещений. ~: Переход от исходных неизвестных Z к новым (групповым) неизвестным Z η11 η 21 η= η i1 η n1 η 12 η 22 η i2 η n2 η1k η 2k η ik η in т Z~ = Z~1 Z~2 Z~k Z~n = η Z η11 ~ η12 ~ η1n ~ η21 ~ η22 η 2n – матрица линейного ~ η= ~ ~ η in преобразования ηi 1 ηi 2 неизвестных η nn Det ( ) 0 ~ ηn1 ~ ηn 2 Канонические уравнения: ~ =0 ~r Z~ R Σ ~ η1k ~ η2 k ~ ηik ~ ηin ~ Z =~ η Z ~ ~ η1n ~ η2 n 1 =η ~ ηin ~ ηnn r = a~ Ka~ ; RΣ = a~ S Σ c~ Fu Коэффициенты и свободные члены уравнений: ~ ~ ~ = (a~т Ka~)1 (a~т S c~тF ) Групповые основные неизвестные: Z = ~ r 1 R Σ Σ u Искомые усилия: т т S = S~0 Z~ SΣ = SΣ S~0 (a~т Ka~)1 (a~т SΣ c~тFu) Ka~ Ka~ т ИСПОЛЬЗОВАНИЕ ГРУППОВЫХ ОСНОВНЫХ НЕИЗВЕСТНЫХ МЕТОДА ПЕРЕМЕЩЕНИЙ В РАСЧЁТАХ СИММЕТРИЧНЫХ СИСТЕМ Основная система с исходными основными неизвестными Z = [ Z1 Z2 …Zi … Zk … Zn ]т С С Zk Zk +1 Zi +1 Zi основные неизвестные: Связь между исходными неизвестными Z Новые (групповые) ~ ~ Z k 1 ~ Z k 1 и новыми ( групповыми ) неизвестными Z : ~ ~ ~ Z ~ = ~ ~ ~ ~ Zi = Z η ii Z η i, i 1 Z i i 1 i i 1 ~ ~ ~ ~ ~ ~ Z i 1 = Z i Z i 1 = η i 1, i Z i η i 1, i 1 Z i 1 ~ ~ ~ ~ ~ ~ Z k = Z k Z k 1 = η kk Z k η k , k 1 Z k 1 ~ Z ~ =~ ~ ~ ~ Z k 1 = Z η k 1, k Z η k 1, k 1 Z k k 1 k k 1 ~η ii ~ ~η = η i 1, i ~ ~η ki η k 1, i ~η i , i 1 ~η i 1 , i 1 ~η k , i 1 ~η k 1, i 1 ~η ik ~η i 1, k ~η kk ~η k 1, k С Zk ~ Z =~ η Z ~ ~ Z Zi i 1 Zk Z~i ~ Z i 1 Матрицы линейного преобразования неизвестных: ~η i , k 1 1 ~η i 1, k 1 1 ~η k , k 1 = 0 ~η k 1, k 1 0 1 1 0 0 0 0 1 1 0 0 1 =η 1 1 η ii η η = i 1, i η ki η k 1, i η i , i 1 η i 1, i 1 η k , i 1 η k 1, i 1 η ik η i 1, k η kk η k 1, k η i , k 1 0,5 0,5 0 0 η i 1, k 1 0,5 0,5 0 0 ~ 1 = =η η k , k 1 0 0 0,5 0,5 0 0,5 0,5 η k 1, k 1 0 Det ( ) 0 ИСПОЛЬЗОВАНИЕ ГРУППОВЫХ ОСНОВНЫХ НЕИЗВЕСТНЫХ МЕТОДА ПЕРЕМЕЩЕНИЙ В РАСЧЁТАХ СИММЕТРИЧНЫХ СИСТЕМ Новые (групповые) основные неизвестные: ~ ~ Z Канонические уравнения: k 1 Z k 1 ~ ~ Zk С Вектор Z ~ Z ~ основных Z = ~sim Zasim неизвестных: k ~ Z ~ Zi i 1 Z~i ~ Z i 1 Реакции связей, соответствующие групповым неизвестным ~ = l1 Z С ~r r Z~k = 1 k ~ rkk kk r l ~ ~ rik rik ~ rik = ? ~ rkk = ? ~ r ~ r = ~ss ras,s ~R ~ =0 ~ r Z Σ ~ RsΣ ~ RΣ = ~ Ras,Σ ~ R ~ =0 ~ rss Z sim sΣ ~ R ~ =0 ~ r Z as,as asim as,Σ При симметричном воздействии ~ =0 ~ =0 (нагрузке) R Z as, Σ asim ~ rik = ( ~ rikl ~ rikr ) – из условия симметрии ~ rik l r ~ ~ rik = rik = 2 ~ rs,as ~ ras,as ~ rs,as = ~ ras,т s = 0 ~ =~ ~ =~ ~ ~ r ~ W rik Z rikl Z ki i i rik Z i = ~ =(~ rikl ~ rikr ) Z i ~ rikl = ~ rikr ~R ~ =0 ~ r Z Σ Аналогично ~ rkk l r ~ ~ rkk = rkk = 2 При обратносимметричном (антисимметричном) воздействии ~ =0 ~ =0 (нагрузке) R Z sΣ sim ИСПОЛЬЗОВАНИЕ ГРУППОВЫХ ОСНОВНЫХ НЕИЗВЕСТНЫХ МЕТОДА ПЕРЕМЕЩЕНИЙ В РАСЧЁТАХ СИММЕТРИЧНЫХ СИСТЕМ Новые (групповые) основные неизвестные: ~ ~ Z Канонические уравнения: k 1 Z k 1 ~ ~ Zk С Вектор Z ~ Z ~ основных Z = ~sim Zasim неизвестных: k Z~i ~ Z i 1 ~ Z ~ Zi i 1 ~ r ~ r = ~ss ras,s Реакции связей, соответствующие групповым неизвестным, от заданных воздействий Rk 1,Σ RkΣ RiΣ Ri 1,Σ ~ = R R R i,Σ i,Σ i 1,Σ ~ = R R R i 1,Σ i,Σ i 1,Σ ~ ~ R R k,Σ k,Σ ~ R i 1,Σ 2 2 2 ~ R i,Σ 2 ~R ~ =0 ~ r Z Σ asim as,Σ При симметричном воздействии ~ =0 ~ =0 (нагрузке) R Z as, Σ asim ~ = R R R k,Σ k,Σ k 1,Σ ~ R =R R k,Σ ~ RsΣ ~ RΣ = ~ Ras,Σ ~ R ~ =0 ~ rss Z sim sΣ ~ R ~ =0 ~ r Z as,as ~ R k 1,Σ 2 k 1,Σ ~ rs,as ~ ras,as ~ rs,as = ~ ras,т s = 0 С ~ R k 1,Σ 2 ~R ~ =0 ~ r Z Σ k 1,Σ При обратносимметричном (антисимметричном) воздействии ~ =0 ~ =0 (нагрузке) R Z sΣ sim РАЗЛОЖЕНИЕ НАГРУЗКИ И РАЗДЕЛЕНИЕ СИСТЕМЫ ПО ОСИ СИММЕТРИИ С F q Симметричная составляющая нагрузки F/ 2 q/2 Обратносимметричная составляющая нагрузки M С С F/ 2 q/2 F/ 2 q/2 F/ 2 q/2 M/2 M/2 M/2 M/ 2 РАЗЛОЖЕНИЕ НАГРУЗКИ И РАЗДЕЛЕНИЕ СИСТЕМЫ ПО ОСИ СИММЕТРИИ С F q Симметричная составляющая нагрузки F/ 2 q/2 С С u=0 u=0 q=0 F/ 2 q/2 q/2 Моделирование половины системы nk = 4 (2) ( nst = 5 ) v=0 F/ 2 v=0 Условия по перемещениям на оси симметрии M/2 С M/2 M F/ 2 M/2 F/ 2 q/2 Обратносимметричная составляющая нагрузки q/2 M/2 M/2 С F/ 2 q/ 2 M/2 nk = 3 ( nst = 4 ) Контрольные вопросы ( в скобках даны номера слайдов, в которых можно найти ответы на вопросы; для перехода к слайду с ответом можно сделать щелчок мышью по номеру в скобках*); для возврата к контрольным вопросам сделать щелчок правой кнопкой мыши и выбрать «Перейти к слайду 18» ) 1. Особенности расчёта деформируемых систем методом перемещений: а) обусловленные характером воздействия (силовое, температурное, кинематическое) ( 8 ) ; б) только при узловых нагрузках ( 9 ) ; в) для СНС разных типов (балки, рамы, фермы, комбинированные системы) ( 10 – 11 ) . 2. Приведение заданных воздействий к расчётным узловым нагрузкам ( 9 ) . 3. Использование групповых основных неизвестных в расчётах методом перемещений ( 12 ) . 4. Особенности группировки неизвестных в симметричных системах ( 13 ) . 5. Особенности реакций связей в единичных состояниях ОСМП ( 14 ) и при заданных воздействиях ( 15 ) . 6. Какие упрощения в расчёте симметричной системы методом перемещений даёт использование групповых неизвестных: а) при произвольных воздействиях? ( 14 ) б) при воздействиях, обладающих прямой или обратной симметрией? ( 14 ) 7. Расчёт симметричной системы с использованием разделения на части по оси симметрии: а) какие преобразования заданных воздействий (нагрузок и др.) должны быть выполнены предварительно? ( 16 ) б) как моделируется в схеме рассчитываемой половины системы влияние отбрасываемой другой части? ( 17 ) в) чем отличаются схемы половины симметричной системы в расчётах на симметричную и обратносимметричную составляющие заданного воздействия? ( 17 ) *) Только в режиме «Показ слайдов».