Классификация моделей Тип 2
реклама

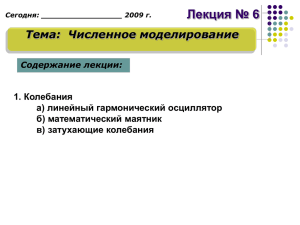
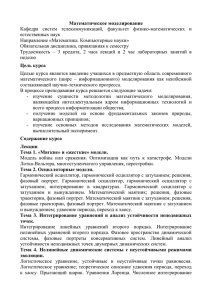
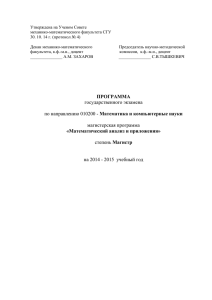
Сегодня: _________________ 2009 г. Курс: Общий физический практикум Склярова Елена Александровна Сегодня: __________________ 2009 г. Лекция №2 Тема: Этапы построения моделей Содержание лекции: 1. Обследование объекта моделирования 2. Концептуальная и математическая постановка Задачи. 3. Выбор и обоснование выбора методов решения задачи. 4. Разработка алгоритма и компьютерная реализация модели 5. Проверка адекватности модели. 6. Практическое использование модели. Этапы построения модели Выбор и обоснование выбора метода решения задачи Метод решения хорош, если с самого начала мы можем предвидеть - и далее подтвердить это, - что следуя этому методу, мы достигнем цели. Г. Лейбниц При использовании разработанных математических моделей, как правило, требуется найти зависимость некоторых неизвестных заранее параметров объекта моделирования (например, координаты и скорость центра масс тела, точность броска), удовлетворяющих определенной системе уравнений. Таким образом, поиск решения задачи сводится к отысканию некоторых зависимостей искомых величин от исходных параметров модели. Все методы решения соответствующих задач, составляющих "ядро" любых моделей, можно подразделить на: - аналитические - алгоритмические. Математическая постановка А) Векторная форма Найти зависимости от времени для векторных параметров r(t) и v(t) из решения системы обыкновенных дифференциальных уравнений: m(dv/dt) = mg, v = dr/dt (2.1) при следующих начальных условиях: r(0) = 0 , v(0) = v0 (2.2) Вычислить параметр как = r(tk) - rxk , (2.3) где tk определить из следующих условий tk > 0, vy(tk) < 0, y(tk) = yk. (2.4) Математическая постановка Б) Координатная форма Найти зависимости x(t), y(t) и vx(t), vy(t) из решения системы дифференциальных уравнений: m(dvx/dt) = 0, vx = dx/dt, m(dvy/dt) = - mg, vy = dy/dt (2.5) при следующих начальных условиях: х(0) = х0, у(0) = у0, vx(0) = v0 cos 0, vy(0) = v0sin 0. (2.6) Вычислить параметр как = r(tk) - xk , (2.7) где tk определить из следующих условий tk > 0, vy(tk) < 0, y(tk) = yk. (2.8) Аналитическое решение задачи Проинтегрировав соотношения (2.5) по времени, получим х(t) = С2 + С1t, y(t) = C4 + C3t – gt2/2, vx(t) = C1, vy(t) = C3- gt (2.9) Константы интегрирования найдем из начальных условий (2.6). Тогда решение задачи можно записать следующим образом x(t) = х0 + v0t cos 0 , y(t) = у0 + v0t sin 0 - gt2/2, vx(t) = v0 cos 0, vy(t) = v0 sin - gt. (2.10) Примем для простоты, что в момент броска мяч находится в начале координат и на одном уровне с корзиной (т.е. х0 = у0= уk = 0). Аналитическое решение задачи Под дальностью L броска будем понимать расстояние, которое пролетит мяч от точки броска до пересечения с горизонтальной плоскостью, проходящей через кольцо корзины. Из соотношений (2.10) для координат дальность броска выразится следующим образом: L = (v02/g) sin 20 (2.11) Тогда точность броска с учетом (2.7) будет равна = L – xk (2.12) Например, при броске мяча со штрафной линии можно принять следующие исходные данные: х0 = у0 = ук = 0; хк = 4,225 м; v0 = 6,44 м/с; = 45°. Тогда из (2.11) и (2.12) имеем L = 4,225 м; = 0 м. Реализация программы на компьютере Компьютеры бесподобны: за несколько минут они могут совершить такую ошибку, которую не в состоянии сделать множество людей за многие месяцы. (Лоуренс Дж. Питер) Процесс создания программного обеспечения можно разбить на ряд этапов: 1. разработка технического задания; 2. проектирование структуры программного комплекса; 3. кодирование алгоритма; 4. тестирование и отладка; 5. сопровождение и эксплуатация. Реализация модели на компьютере Техническое задание на разработку программного обеспечения оформляют в виде спецификации. Примерная форма спецификации включает следующие 7 разделов: 1) Название задачи 2) Описание 3) Управление режимами работы программы 4) Входные данные 5) Выходные данные 6) Ошибки 7) Тестовые задачи Спецификация задачи о баскетболисте 1) Название задачи Название программы Basketball С Система программирования Delphi Компьютер IBM PC Pentium Операционная система Windows-XP 2) Описание Приводится математическая постановка задачи и описание метода ее решения. 3) Управление режимами работы программы 4) Входные данные Входными данными являются радиус и масса мяча, его начальные координаты и скорость, угол бросания, координаты корзины. Спецификация задачи о баскетболисте 5) Выходные данные Траектория центра мяча, расчетная величина дальности и точность броска. 6) Ошибки При вводе исходных данных предусмотреть контроль: - все вводимые значения должны быть положительны; - угол бросания лежит в пределах от 5 до 85 градусов; - начальная скорость мяча лежит в пределах от 0 до 30 м/с; - горизонтальная координата центра корзины больше начальной горизонтальной координаты мяча. 7) Тестовые примеры При х0 = у0 = уk = 0; хk = 4,225; u0 = 6,44; = 45; Получаем: L = 4,225; = 0. Проверка адекватности модели Под адекватностью модели будет пониматься степень соответствия результатов, полученных по разработанной модели, данным эксперимента или тестовой задачи. Проверка адекватности модели преследует две цели: 1. 2. Убедиться в справедливости совокупности гипотез, сформулированных на этапах концептуальной и математической постановок. Убедиться, что точность полученных результатов соответствует точности, оговоренной в техническом задании. Примеры Модель движения лодки Рассмотрим поэтапное построение модели движения лодки Содержательная постановка Лодку оттолкнули от берега и, разогнав, отпустили при некоторой начальной скорости. Необходимо исследовать движение лодки. Полученные результаты представить в графическом виде. Концептуальная постановка Рассматривается движение лодки в воде с начальной горизонтальной скоростью u0 под действием силы тяжести mg, архимедовой выталкивающей силы NA и силы сопротивления движению Fc, приложенных к центру масс. Так как лодка держится на плаву (движение по вертикали отсутствует), то архимедова выталкивающая сила NA уравновешивает силу тяжести mg. Разработку модели будем выполнять при следующих предположениях: 1. Объектом исследования является лодка, совершающая поступательное движение в горизонтальной плоскости. 2. Лодку принимаем за материальную точку массы m, положение которой совпадает с центром масс. Концептуальная постановка 3. Движение лодки под действием приложенной системы сил подчиняется основному уравнению динамики (второму закону Ньютона). 4. Величина силы сопротивления воды Fc прямо пропорциональна скорости лодки и противоположна по направлению: Fc = - mu, где m - коэффициент пропорциональности (величина постоянная). Требуется определить скорость лодки как функцию времени и графически отобразить эту зависимость. Этапы построения модели I этап 1.1. Постановка задачи моделирования системы; 1.2. Анализ задачи моделирования системы; 1.3. Определение требований к исходной информации об объекте моделирования и организация его сбора. 1.4. Выдвижение гипотез и принятие предположений; 1.5. Определение параметров и переменных модели; 1.6. Установление основного содержания модели; 1.7. Обоснование критериев оценки эффективности системы; 1.8. Определение процедур аппроксимации; 1.9. Описание концептуальной схемы модели; 1.10. Проверка достоверности концептуальной модели; 1.11. Составление технической документации по первому этапу. II этап 2.1. Построение логической схемы модели; 2.2. Получение математических соотношений; 2.3. Проверка достоверности модели системы 2.4. Выбор инструментальных средств для моделирования; 2.5. Составление плана выполнения работ по моделированию; 2.6. Спецификация и построение схемы программы; 2.7. Верификация и проверка достоверности программы; 2.8. Проведение программирования модели; 2.9. Проверка достоверности программы; 2.10. Составление технической документации по второму этапу. III этап 3.1. Планирование машинного эксперимента с моделью системы; 3.2. Определение требований к вычислительным средствам; 3.3. Проведение рабочих расчетов; 3.4. Анализ результатов моделирования системы; 3.5. Представление результатов моделирования; 3.6. Интерпретация результатов моделирования; 3.7. Подведение итогов моделирования и выдача рекомендаций; 3.8. Составление технической документации по третьему этапу. Примеры моделирования Информационное моделирование Компьютерное моделирование Математическое моделирование Математико-картографическое моделирование Молекулярное моделирование Цифровое моделирование Логическое моделирование Педагогическое моделирование Психологическое моделирование Статистическое моделирование Структурное моделирование Физическое моделирование Экономико-математическое моделирование Имитационное моделирование Эволюционное моделирование и т. д. Алгоритмы компьютерного моделирования Метод конечных элементов Метод конечных разностей Метод контрольных объёмов Метод конечных элементов Метод конечных элементов (МКЭ) — численный метод решения задач прикладной механики. Широко используется для решения задач механики деформируемого твёрдого тела, теплообмена, гидродинамики и электромагнитных полей. С точки зрения вычислительной математики, идея метода конечных элементов заключается в том, что минимизация функционала вариационной задачи осуществляется на совокупности функций, каждая из которых определена на своей подобласти, для численного анализа системы позволяет рассматривать его как одну из конкретных ветвей диакоптики — общего метода исследования систем путём их расчленения. Метод конечных элементов Метод конечных элементов: триангуляция Метод конечных элементов Наиболее распространенные системы КЭ анализа: ANSYS - универсальная система КЭ анализа с встроенным пре/постпроцессором; MSC.Nastran - универсальная система КЭ анализа с пре/постпроцессором MSC.Patran; ABAQUS - универсальная система КЭ анализа с встроенным пре/постпроцессором; Impact - универсальная система КЭ анализа с встроенным пре/постпроцессором; SAMCEF - универсальная система КЭ анализа с пре/постпроцессором SAMCEF Field. Temper-3D - система КЭ анализа для расчёта температурных полей в трёхмерных конструкциях (теплотехнический расчёт). COMSOL Multiphysics - универсальная система КЭ анализа с пре/постпроцессором. Метод конечных элементов Програмное обеспечение, в основе которого лежит метод конечных элементов: ПК Лира ANSYS Nastran SCAD MatLab FemLab Метод конечных разностей Метод конечных разностей - широко известный и простейший метод интерполяции. Его суть заключается в замене дифференциальных коэффициентов уравнения на разностные коэффициенты, что позволяет свести решение дифференциального уравнения к решению его разностного аналога, т.е. построить его конечно-разностную схему. Метод конечных разностей Так, заменив производную в обыкновенном дифференциальном уравнении u'(x) = 3u(x) + 2 на конечную разность получаем аппроксимированную форму (конечно-разностную схему) Последнее выражение носит название конечно-разностного уравнения, а его решение соответствует приближённому решению первоначального дифференциального уравнения. Классификация моделей Классификация моделей делится на: Содержательную Формальную Классификация моделей Тип 1: Гипотеза (такое могло бы быть) Эти модели «представляют собой пробное описание явления, причем автор либо верит в его возможность, либо считает даже его истинным». По Р. Пайерлсу это, например, модель Солнечной системы по Птолемею и модель Коперника (усовершенствованная Кеплером), модель атома Резерфорда и модель Большого Взрыва. Естествознание в Европе Естествознание в Европе Модель атома Резерфорда Опираясь на классические представления о движении микрочастиц, Резерфорд предложил планетарную модель атома. Согласно этой модели, в центре атома располагается положительно заряженное ядро, в котором сосредоточена почти вся масса атома. Атом в целом нейтрален. Вокруг ядра, подобно планетам, вращаются под действием кулоновских сил со стороны ядра электроны. Находиться в состоянии покоя электроны не могут, так как они упали бы на ядро. Планетарная модель атома Резерфорда. Показаны круговые орбиты четырех электронов W >1 W =1 W<1 Ускорение соответствует ∆Н=15 км/с за 1 млн лет Классификация моделей Никакая гипотеза в науке не бывает доказана раз и навсегда. Очень чётко это сформулировал Ричард Фейнман: «У нас всегда есть возможность опровергнуть теорию, но, обратите внимание, мы никогда не можем доказать, что она правильна. Предположим, что вы выдвинули удачную гипотезу, рассчитали, к чему это ведет, и выяснили, что все ее следствия подтверждаются экспериментально. Значит ли это, что ваша теория правильна? Нет, просто-напросто это значит, что вам не удалось ее опровергнуть». Классификация моделей Тип 2: феноменологическая модель (ведем себя так, как если бы…) Феноменологическая модель содержит механизм для описания явления. Однако этот механизм недостаточно убедителен, не может быть достаточно подтверждён имеющимися данными или плохо согласуется с имеющимися теориями и накопленным знанием об объекте. Поэтому феноменологические модели имеют статус вре́менных решений. Считается, что ответ всё ещё неизвестен и необходимо продолжить поиск «истинных механизмов». Ко второму типу Пайерлс относит, например, модели теплорода и кварковую модель элементарных частиц. 2 3 1 3 1 3 2 1 3 2 3 3 1 3 2 3 2 3 Заряд составной частицы равен сумме зарядов кварков 2 3 1 1 3 3 Заряд составной частицы равен сумме зарядов кварков Классификация моделей Тип 3: Приближение (что-то считаем очень большим или очень малым) Если можно построить уравнения, описывающие исследуемую систему, то это не значит, что их можно решить даже с помощью компьютера. Общепринятый прием в этом случае — использование приближений (моделей типа 3). Среди них модели линейного отклика. Уравнения заменяются линейными. Стандартный пример — закон Ома. Если мы используем модель идеального газа для описания достаточно разреженных газов, то это — модель типа 3 (приближение). При более высоких плотностях газа тоже полезно представлять себе более простую ситуацию с идеальным газом для качественного понимания и оценок, но тогда это уже тип 4. Классификация моделей Тип 4: Упрощение (опустим для ясности некоторые детали) В модели типа 4 отбрасываются детали, которые могут заметно и не всегда контролируемо повлиять на результат. Одни и те же уравнения могут служить моделью типа 3 (приближение) или 4 (опустим для ясности некоторые детали) — это зависит от явления, для изучения которого используется модель. Примеры: применение модели идеального газа к неидеальному, уравнение состояния Ван-дер-Ваальса, большинство моделей физики твердого тела, жидкостей и ядерной физики. Классификация моделей Тип 5: Эвристическая модель (количественного подтверждения нет, но модель способствует более глубокому проникновению в суть дела) Эвристическая модель сохраняет лишь качественное подобие реальности и даёт предсказания только «по порядку величины». Типичный пример — приближение средней длины свободного пробега в кинетической теории. Она даёт простые формулы для коэффициентов вязкости, диффузии, теплопроводности, согласующиеся с реальностью по порядку величины. Но при построении новой физики далеко не сразу получается модель, дающая хотя бы качественное описание объекта — модель пятого типа. В этом случае часто используют модель по аналогии, отражающую действительность хоть в какой-нибудь черте. Классификация моделей Тип 6: Аналогия (учтём только некоторые особенности) Классификация моделей Тип 7: Мысленный эксперимент (главное состоит в опровержении возможности) А. Эйнштейн был одним из великих мастеров мысленного эксперимента. Вот один из его экспериментов. Он был придуман в юности и, в конце концов, привел к построению специальной теории относительности. Предположим, что в классической физике мы движемся за световой волной со скоростью света. Мы будем наблюдать периодически меняющееся в пространстве и постоянное во времени электромагнитное поле. Согласно уравнениям Максвелла, этого быть не может. Отсюда юный Эйнштейн заключил: либо законы природы меняются при смене системы отсчета, либо скорость света не зависит от системы отсчета. Он выбрал второй — более красивый вариант. Другой знаменитый мысленный эксперимент Эйнштейна — Парадокс Эйнштейна — Подольского — Розена Классификация моделей Тип 8: Демонстрация возможности (главное — показать внутреннюю непротиворечивость возможности) Это тоже мысленные эксперименты с воображаемыми сущностями, демонстрирующие, что предполагаемое явление согласуется с базовыми принципам и внутренне непротиворечиво. Один из самых знаменитых таких экспериментов — геометрия Лобачевского (Лобачевский называл её «воображаемой геометрией»). Другой пример — массовое производство формально — кинетических моделей химических и биологических колебаний, автоволн и др. Классификация моделей Формальная классификация моделей основывается на классификации используемых математических средств. Например: Линейные или нелинейные модели; Детерминисткие или стохастические; Статические или динамические; Сосредоточенные или распределённые системы; Дискретные или непрерывные, И др. Классификация моделей Линейная система — система, для которой воздействие и отклик связаны системой линейных дифференциальных уравнений. В простейшем случае, когда отклик описывается единственной функцией, для описания достаточно одного дифференциального уравнения. Нелинейная система — динамическая система, в которой протекают процессы, описываемые нелинейными дифференциальными уравнениями. Свойства и характеристики нелинейных систем зависят от их состояния. Динамическая система — математическая абстракция, предназначенная для описания и изучения систем, эволюционирующих с течением времени. Примером могут служить механические системы (движущиеся группы тел) или физические процессы. Пример Рассмотрим механическую систему, состоящую из пружины, закрепленной с одного конца, и груза массой m, прикрепленного к свободному концу пружины. Будем считать, что груз может двигаться только в направлении оси пружины (например, движение происходит вдоль стержня). Построим математическую модель этой системы. Будем описывать состояние системы расстоянием x от центра груза до его положения равновесия. Опишем взаимодействие пружины и груза с помощью закона Гука (F = − kx) после чего воспользуемся вторым законом Ньютона, чтобы выразить его в форме дифференциального уравнения: где означает вторую производную от x по времени: . Полученное уравнение описывает математическую модель рассмотренной физической системы. Эта модель называется «гармоническим осциллятором». Пример Модель Мальтуса Cкорость роста пропорциональна текущему размеру популяции. Она описывается дифференциальным уравнением где α — некоторый параметр, определяемый разностью между рождаемостью и смертностью. Решением этого уравнения является экспоненциальная функция x(t) = x0eαt. Если рождаемость превосходит смертность (α > 0), размер популяции неограниченно и очень быстро возрастает. Понятно, что в действительности этого не может происходить из-за ограниченности ресурсов. При достижении некоторого критического объёма популяции модель перестает быть адекватной, поскольку не учитывает ограниченность ресурсов. Классификация моделей При достижении некоторого критического объёма популяции модель перестает быть адекватной, поскольку не учитывает ограниченность ресурсов. Уточнением модели Мальтуса может служить модель, которая описывается дифференциальным уравнением Ферхюльста. где xs — «равновесный» размер популяции, при котором рождаемость в точности компенсируется смертностью. Размер популяции в такой модели стремится к равновесному значению xs, причем такое поведение структурно устойчиво. Классификация моделей Метод состоит в создании лабораторной физической модели явления в уменьшенных масштабах, и проведении экспериментов на этой модели. Выводы и данные, полученные в этих экспериментах, распространяются затем на явление в реальных масштабах. Метод может дать надёжные результаты, лишь в случае соблюдения физического подобия реального явления и модели. Подобие достигается за счёт равенства для модели и реального явления значений критериев подобия — безразмерных чисел, зависящих от физических ( в том числе геометрических) параметров, характеризующих явление. Экспериментальные данные, полученные методом физического моделирования распространяются на реальное явление также с учётом критериев подобия. Классификация моделей Некоторые примеры применения метода физического моделирования: Исследование течений газов и обтекания летательных аппаратов, автомобилей, и т.п. в аэродинамических трубах. Гидродинамические исследования на уменьшенных моделях кораблей, гидротехнических сооружений и т.п. Исследование сейсмоустойчивости зданий и сооружений на этапе проектирования. Изучение устойчивости сложных конструкций, под воздействием сложных силовых нагрузок. Измерение тепловых потоков и рассеивания тепла в устройствах и системах, работающих в условиях больших тепловых нагрузок. Изучение стихийных явлений и их последствий. Движение точки под действием центральных сил Содержательная постановка Требуется исследовать параметры движения космического корабля вблизи планеты. Масса, начальное положение и начальная скорость корабля известны. Концептуальная постановка Рис.1 Космический корабль массой т движется из положения с координатами х0, у0 с начальной скоростью v0 под действием силы притяжения F, направленной к неподвижному центру. Требуется определить координаты и компоненты вектора скорости космического корабля как функций времени, а также траекторию его движения. Движение точки под действием центральных сил - - - Построение модели выполняем при следующих допущениях: Объектом исследования является космический корабль, принимаемый за материальную точку. Параметрами модели являются координаты (х, у) и скорость v корабля. Движение корабля происходит в одной плоскости и подчиняется основному уравнению динамики (второму закону Ньютона): mdv/dt = F. Величина (модуль) силы притяжения к центру определяется законом всемирного тяготения F = mM/r2, где = 6,672·10-11 Н· м2/кг2 - гравитационная постоянная, r = x 2 y 2 - расстояние между точкой массой m и центром притяжения, имеющим массу М. Движение точки под действием центральных сил Математическая постановка Найти решение задачи Коши для следующей системы уравнений mM dvx m dt = Fx = r 2 cos(), m dv y = F = mM sin( ), y dt r2 при начальных условиях x(0) = x0, y(0) = y0, vx(0) = vх0, vy(0) = vy0 dx = vx , dt dy = vy , dt (1) (2) Движение точки под действием центральных сил Решение задачи Принимая во внимание, что cos() =x/r, sin() =у/r и сокращая в (1) массу корабля, получаем Mx dvx dt = Fx = r 3 , dv y = F = My , y dt r3 dx = vx , dt dy = vy , dt Решение задачи будем искать с использованием численного метода Эйлера. Заменим производные их разностными аналогами: Mx vx (t t ) vx (t ) = , 3 t r v y (t t ) v y (t ) = My , t r3 x(t t ) x(t ) = t y (t t ) y (t ) = t Движение точки под действием центральных сил Из полученной системы разностных уравнений можно выразить скорости и перемещения: v x (t t ) = v x (t ) Mx (t )t r 3 (t ), 3 v ( t t ) = v ( t ) My ( t ) t r (t ), y y x(t t ) = x(t ) v x (t )t , y (t t ) = y (t ) v (t )t , y r (t ) = x 2 (t ) y 2 (t ) (3) Движение точки под действием центральных сил Анализ результатов На рис.2 показаны траектории движения космического аппарата, полученные решением системы уравнений (3) при различных начальных скоростях. При проведении расчетов принято: М = 6 • 1024 кг (масса Земли), космический корабль находится в начальной точке с координатами х(0) = 0 м, у(0) = 6,4 • 106 м. Начальная скорость направлена по горизонтали вправо. Шаг интегрирования t выбран равным 0,01 с. Поскольку радиус Земли R равен 6,37 • 106 м, ускорение g свободного падения оценивается величиной 9,81 м/с 2 (приближенные значения); для орбиты, находящейся над поверхностью планеты на высоте h = 30000 м, первая и вторая космические скорости соответственно равны: v1 = g ( R h) = 7923 м/с и vII = 2 g ( R h) = 11206 м/с Движение точки под действием центральных сил Рис 2. Траектории движения космического корабля при разных начальных скоростях: vx(0) = 7500 м/с (a), vx(0) = 7923 м/с (б), vx(0) = 10000 м/с (в) и vx(0) = 11206 м/с (г); во всех вариантах vу(0) = 0 м/с; пунктиром обозначена поверхность планеты Пример Содержательная постановка Исследовать движение планеты в системе двух звезд. Массы планеты, звезд, их начальное положение и скорости известны. Рис.3. Концептуальная постановка Планета массой т движется из положения с координатами х0, у0 с начальной скоростью v0 под действием сил притяжения F1 и F2 звезд неподвижной двойной системы. Положения и массы звезд определяются величинами Х1, У1, M1, и Х2, Y2, M2 соответственно. Требуется определить координаты и скорость планеты как функций времени, а также траекторию ее движения. Движение точки под действием центральных сил Построение модели выполняем при следующих допущениях: - Объектом исследования является планета, принимаемая за материальную точку. - Параметрами модели являются координаты (x, y) и скорость v планеты. - Движение планеты происходит в одной плоскости и подчиняется основному уравнению динамики (второму закону Ньютона): mdv/dt = F. - Величина (модуль) силы притяжения к центру звезды определяется законом всемирного тяготения F = mM/r2, где - гравитационная постоянная, r - расстояние между центром планеты и центром звезды. Движение точки под действием центральных сил Математическая постановка Найти решение задачи Коши для следующей системы уравнений: где mM1 mM 2 dv x m dt = r 2 cos(1 ) r 2 cos( 2 ), 1 2 m dv y = mM1 sin( ) mM 2 sin( ), 1 2 dt r12 r22 dx = vx , dt (4) dy = vy , dt r1 = ( x X 1 ) 2 ( y Y1 ) 2 , r2 = ( x X 2 ) 2 ( y Y2 ) 2 . При начальных условиях x(0) = x0, y(0) = y0, vx(0) = vх0, vy(0) = vy0 (5) Движение точки под действием центральных сил Решение задачи Для решения задачи используем численный метод. Заменяем производные разностным аналогом и получаем следующую систему разностных уравнений: v x (t t ) = v x (t ) M 1 ( x(t ) X 1 ) t r 31(t ) 3 M ( x ( t ) X ) t r 2 2 2 (t ), v (t t ) = v (t ) M ( y (t ) Y )t r 3 (t ) y 1 1 1 y M ( y (t ) Y )t r 3 (t ), 2 2 2 x(t t ) = x(t ) v (t )t , x y (t t ) = y (t ) v y (t )t , r1 (t ) = ( x(t ) X 1 ) 2 ( y (t ) Y1 ) 2 , r2 (t ) = ( x(t ) X 2 ) 2 ( y (t ) Y2 ) 2 , (6) Движение точки под действием центральных сил Анализ результатов Траектории движения планеты в системе двух неподвижных звезд при различных исходных данных приведены на рис. Значения исходных данных выбраны произвольно и не соответствуют параметрам реальных систем. При проведении расчетов по формулам (6) принято, что первый центр притяжения М1, находится в начале системы координат (Х1 = Y1 = 0), второй центр притяжения М2 расположен в точке Х2 = 3 • 106 м, Y2 = 3 • 106 м, планета находится в начальной точке с координатами х0 = 4,8 • 106 м, у0 = 6,4 • 106 м и имеет начальную скорость, направленную по горизонтали вправо (vy0 = 0). Шаг интегрирования по времени t во всех вариантах принят равным 1 с. Движение точки под действием центральных сил Рассмотрены следующие варианты движения планеты: М1 = 2 • 1023 кг, М2 = 2 • 1023 кг, vx0 = 1,2 • 103 м/с (рис. 4, а ); М1 = 5 • 1022 кг, М2 = 2,5 • 1023 кг, vx0 = 1,25 -103 м/с (рис. 4,б); М1 = 2 • 1024 кг, М2 = 2 • 1024 кг, vx0 = 6 • 103 м/с (рис. 4, в ); М1 = 2-1024 кг, М2 = 2• 1024 кг, vx0 = 5• 103 м/с (рис. 4, г). Приведенные результаты показывают, что движение планеты под действием двух центральных сил оказывается в значительной степени неустойчивым. Сравнительно небольшие изменения исходных данных приводят к качественному изменению характера движения планеты (сравните рис. 4, а и 4,б, рис. 4, в и 4, г). Движение точки под действием центральных сил Рис. 4. Некоторые траектории движения планеты в поле действия двух центральных сил Гармонический осциллятор Содержательная постановка Тело, лежащее на гладкой горизонтальной плоскости, прикреплено к неподвижной стене пружиной. Исследовать колебательные движения тела. Масса тела и жесткость пружины известны. Рис.7. Гармонический осциллятор Концептуальная постановка Примем следующие предположения: 1. Объектом исследования является поступательно движущееся тело массой m, принимаемое за материальную точку. 2. Движение тела подчиняется второму закону Ньютона. 3. Тело находится под действием трех сил (рис. 5): силы тяжести mg, реакции поверхности N и силы упругости Fe пружины. Так как поверхность гладкая, то силой трения пренебрегаем. 4. Тело совершает прямолинейные колебательные движения, так как сила тяжести mg уравновешивается силой реакцией поверхности N. 5. В уравновешенном состоянии центр масс тела находится в положении с координатами (хp, уp). 6. При малом растяжении пружины величину возникающей в ней силы упругости можно представить линейной зависимостью (закон Гука) F = сΔх, где Δх = х - хр - растяжение пружины (отклонение тела от положения равновесия х), с – жесткость пружины. Направлена сила в сторону положения равновесия. Гармонический осциллятор Принимая, что в некоторый момент пружину растянули на величину х0 и сообщили телу скорость v0, требуется определить координату и скорость тела как функции времени. Математическая постановка С математической точки зрения имеем задачу Коши с начальными условиями: mdv/dt = Fe = -c(x - хр); dx/dt = v при начальных условиях х(0) = х0; v(0) = v0. Требуется найти решение данной задачи. (19) (20) Гармонический осциллятор Решение задачи Введем обозначение для производных по времени: d dx dv x = = = v dt dt dt Тогда, принимая хр = 0, обыкновенное дифференциальное уравнение (3.25) можно переписать в виде: x k 2 x = 0 (21) где k2 = с/т — квадрат частоты свободных колебаний тела около положения равновесия. Период свободных колебаний выражается через циклическую частоту Т = 2p/k. Уравнение (21) называется дифференциальным уравнением свободных колебаний материальной точки. Точка совершает гармонические колебания. Гармонический осциллятор Решение данного однородного линейного уравнения с постоянными коэффициентами можно представить в виде: x = a sin( kt b), (22) где а — амплитуда свободных колебаний, b — начальная фаза колебаний, определяемые из начальных условий. x0 = a sin b, v0 = x = ak cos b. Из этих выражений найдем а и b: a = x v0 k , 2 0 2 x0 tg b = k . v0 (23) Гармонический осциллятор Решение рассматриваемой задачи можно получить численно, заменяя производные их приближенными разностными аналогами и переходя к системе разностных уравнений: v(t t ) = v(t ) k 2 x(t )t , x(t t ) = x(t ) v(t )t Анализ результатов Принимая при выполнении расчетов m = 1 кг, с = 2500 Н/м, х0 = 0 м, v0 = 1м/с, получаем: k = 50 с-1; T = 0,04p; а = 1/ k = 0,02; b = 0; x(t ) = 0,02 sin( 50t ); v(t ) = cos(50t ). (24) Гармонический осциллятор На рис. 8 приведены численные результаты определения положения материальной точки при разных шагах интегрирования Δt. Видно, что с уменьшением величины Δt значения, полученные при численных расчетах, стремятся к точному решению. Рис.8. Влияние величины шара по времени на точность решения. Гармонический осциллятор Изложенный численный способ решения задач позволяет включить в уравнение движения нелинейную зависимость силы упругости пружины от величины растяжения. На рис. 8 представлены результаты численного решения рассмотренной задачи для нелинейных зависимостей силы от растяжения, приводящих к следующим системам разностных уравнений: v(t t ) = v(t ) k 2 x(t )3 t , x(t t ) = x(t ) v(t )t (25) при Fe = cх2 (знак модуля использован для учета направления действия силы в зависимости от положения тела) и v(t t ) = v(t ) k 2 x(t ) x(t ) t , x(t t ) = x(t ) v(t )t при Fe = cх3. Жесткость пружины принималась равной c = 2500 Н/м3. (26) Гармонический осциллятор Результаты, приведенные на рис. 9, свидетельствуют о незатухающих гармонических колебаниях тела во всех рассмотренных случаях. При этом с увеличением показателя степени при величине растяжения пружины происходит увеличение амплитуды и уменьшение частоты колебаний. Рис.9. Влияние вида зависимости силы от растяжения пружины на колебания тела Гармонический осциллятор Определенный интерес представляет анализ зависимости между положением тела и его скоростью, называемой фазовой траекторией. Для этого используют графическое представление процесса в системе координат «положение точки - скорость точки». Для этого представим точное решение в виде: k 2 x 2 (t ) = sin 2 (kt), v 2 (t ) = cos 2 (kt). Исключение времени с помощью тригонометрических формул (сложение полученных соотношений) приводит к уравнению эллипса в системе координат х — v. На рис. 10 показаны найденные численно фазовые траектории для трех рассмотренных выше задач, имеющих разные зависимости сил упругости от удлинения пружин. Рис.10. Фазовые траектории точки при различных законах упругости (1 - Fe = cx; 2 - Fe = cx2; 3 - Fe = cx3) Гармонический осциллятор Усложним задачу введением дополнительной силы сопротивления движению. Такая ситуация возможна, если тело погружено в жидкость (рис. 11, а) или если в рассматриваемую схему добавлен масляный демпфер, гасящий колебания (рис.11, б). В последнем случае вязкое масло при перетекании внутри цилиндра создает дополнительное сопротивление движению. Наличие сил вязкого трения приводит к необходимости добавления новой гипотезы при концептуальной постановке задачи. Подобную гипотезу можно сформулировать следующим образом: Сила вязкого трения прямо пропорциональна скорости тела и направлена против направления его движения: Fc = - mv (m — коэффициент сопротивления, величина постоянная). Гармонический осциллятор Рис. 11. Схемы конструкций с вязкими средами: жидкостью (а); масляным демпфером (б) С учетом данной гипотезы соотношения (19) в математической постановке следует заменить уравнениями следующего вида: dv / dt = k 2 ( x x p ) 2nv; dx/dt = v, где k2 = c/m; 2n = m/m (27) Гармонический осциллятор Систему разностных уравнений в этом случае можно представить следующим образом: v(t t ) = v(t ) [k x(t ) 2nv(t )t , x(t t ) = x(t ) v(t )t. 2 (28) Гармонический осциллятор На рис. 12 показаны изменения координаты и скорости тела, полученные для условий т = 1 кг, с = 2500 Н/м, х0 = 0 м, v0 = = 1 м/с, m = 10 Нс/м (большое значение коэффициента сопротивления выбрано для наглядности результатов), шаг интегрирования t = 10-5 с. Рис. 12. Координата (а) и скорость (б) центра масс тела в вязкой среде Гармонический осциллятор На рис.13 представлена фазовая траектория для тела, совершающего колебания в вязкой среде. В отличие от предыдущей задачи, наличие сопротивления (диссипации механической энергии) приводит к тому, что фазовая траектория оказывается спиралью с уменьшающимся радиусом, стремящимся к нулю. Это соответствует полной остановке механической системы. Рис. 13. Фазовая траектория движения точки в вязкой среде. Гармонический осциллятор Вынуждающие колебания Рассмотрим ситуацию, когда к телу (рис.11) приложена горизонтальная гармоническая сила, величина которой изменяется по закону F(t) = В sin(qt) с амплитудой В и циклической частотой q. Система уравнений (27) преобразуется в этом случае к виду: dv B dx 2 = k ( x x p ) 2nv sin( qt ), = v. dt m dt (29) Система разностных уравнений может быть представлена следующим образом: B 2 v(t t ) = v(t ) k x(t ) 2nv(t ) sin( qt ) t , m x(t t ) = x(t ) v(t )t. (30) Гармонический осциллятор На рис. 14 представлена координата тела при вынужденных колебаниях как функция времени. При выполнении вычислений принято: m = 1 кг, С = 2500 Н/м, m = 0 (без учета вязкости), х0 = = 0 м, vx0 = 1 м/с, В = 10 Н, q = 40, 45, 47,5, 50 и 55 с-1. Рис. 14. Координата тела как функции времени при вынужденных колебаниях с частотами q = 40 с-1 (a), q = 45 с-1 (б), q = 47,5 с-1 (в) и q = 50 с-1 (г) Гармонический осциллятор Рис. 15. Фазовые траектории при вынужденных колебаниях тела с частотой q = 40 с-1 (a), q = 47,5 с-1 (б), q = 50 с-1 (в) и q= 55 с-1 (г) Гармонический осциллятор Рис. 16. Координата (а) и скорость (б) как функция времени, фазовая траектория (в) движения тела при вынужденных колебаниях в вязкой среде Лекция окончена Нажмите клавишу <ESC> для выхода ДВИЖЕНИЕ ТЕЛ В ПОЛЕ ТЯЖЕСТИ ЗЕМЛИ Эффект Доплера Ударные волны. Источник звука движется со звуковой скоростью. Впереди источника формируется ударная волна. Эффект Доплера Источник движется с дозвуковой скоростью. Наблюдается эффект Доплера. Эффект Доплера Ударные волны. Случай движения источника со сверхзвуковой скоростью.