Теорема об изменении момента количеств движения
реклама

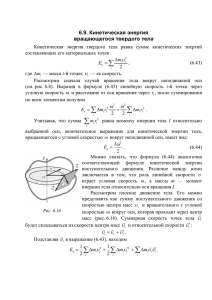
ДИНАМИКА МАТЕРИАЛЬНОЙ СИСТЕМЫ ЛЕКЦИЯ 2: ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 1. Момент количеств движения материальной системы Моментом количеств движения системы относительно центра О называется сумма моментов (главный момент) количеств движения всех материальных точек, входящих в систему, относительно того же центра: n n i 1 i 1 K O K Oi ri mi v i v i - скорость i-ой точки mi - масса i-ой точки ri - радиус-вектор i-ой точки с началом в центре O Координатная запись в проекциях на оси системы координат Oxyz n K x mi yi viz zi viy i 1 n K y mi zi vix xi viz i 1 n K z mi xi viy yi vix i 1 Компонента Qx вектора количества движения системы характеризует поступательное движении систему в направлении оси x Компонента K x момента количеств движения характеризует вращательное движение системы относительно оси x 2. Момент количеств движения вращающегося твердого тела z Элемент M массы dm движется по окружности радиуса hz Скорость движения v hz Количество движения hz dm Момент количества движения dK z hz2 dm K z h dm h dm 2 z V 2 z V hz O M v Iz Интеграл Iz зависит только от распределения масс внутри тела и не зависит от его кинематического состояния. Он называется моментом инерции тела относительно оси z. K z I z Момент количеств движения твердого тела, вращающегося относительно неподвижной оси равен произведению момента инерции тела относительно этой оси на угловую скорость тела. 3. Примеры вычисления момента инерции 1) Момент инерции однородного стержня относительно оси, проходящей перпендикулярно стержню через его конец. M dx l L M 2 1 2 I z hz dm x dx ML2 L 0 3 dm z l dx x x 1) Момент инерции однородного цилиндра относительно его оси. M dm rdr dz d HR 2 M Iz HR 2 z R H 2 R 0 M R4 1 2 0 0 r rdrd dz HR2 H 2 4 2 MR 2 H 4. Связь с моментом, взятым относительно центра масс K O K C Моменты количеств движения и главные моменты сил взятые MO MC относительно произвольного центра O и центра масс С системы ri rC Радиус векторы и скорости материальных точек и центра масс vi vC ri ri rC Радиус-векторы и скорости относительно центра масс vi vi vC m r Mr Свойства центра масс i i C i 1) m r 0, m v 0 i i i i i i K O mi ri vi mi rC ri vC vi i i m v m r i i i i i i vC i miri vi rC Q K C MO ri Fi rC ri Fi rC Fi ri Fi rC F MC rC Mv C rC 2) i i Теорема i K O rC Q K C i MO rC F MC 5. Пример применения Задача: Найти момент количеств движения полого диска, катящегося без скольжения относительно неподвижной точки О rC Q rC MV sin MVR1 M I R12 R22 C O K O rC Q K C rC 0 V R2 R1 KC I 2 R2 V R1 M R14 R24 1 2 2 r rdrd 2 M R R 1 2 R 2 2 4 2 R R 1 2 1 2 KO MVR1 MV 2 MV 2 R R 3R12 R22 1 2 2 R1 2 R1 6. Теорема об изменении момента количеств движения Теорема. Производная по времени вектора момента количеств движения системы материальных точек, вычисленная относительно неподвижного центра, равна главному моменту всех внешних сил относительно того же центра. + dK O1 MO F1e MO F1i dt dK O 2 MO F2e MO F2i dt … n d n e K M F Ok O k dt k 1 k 1 dK On MO Fne MO Fni dt dK O MOe dt n i M F O k k 1 7. Следствия 1. Внутренние силы непосредственно не влияют на изменение момента количеств движения материальной системы (они могут оказать косвенное влияние через внешние силы). 2. Если главный момент всех внешних сил относительно некоторого неподвижного центра равен нулю, то момент количества движения материальной системы относительно этого центра остается постоянным по величине и направлению. dK O 0 K O const dt закон сохранения момента количеств движения 3. Если главный момент всех внешних сил относительно некоторой неподвижной оси равен нулю, то момент количеств движения материальной системы относительно этой оси остается постоянным. 8. Какие силы исключаются в уравнении моментов? При записи уравнения моментов относительно некоторой оси исключаются 1) Все внутренние силы 2) Те внешние силы, момент которых относительно оси равен нулю, т.е. а) силы параллельные оси б) силы, чья линия действия пересекает ось Выбор оси зависит от нас. При удачном выборе можно достигнуть исключения значительного числа внешних сил, упростив тем самым уравнение моментов 9. Формула Эйлера для турбины: постановка задачи В канал все время поступает вода со скоростьюV1 под углом 1 к внешнему ободу и выходит из канала со скоростью V2 под углом 2 к внутреннему ободу. Движение воды установившееся в том смысле, что скорости V1 и V2 и углы 1 и 2 не зависят от положения канала. U i ri U1 1 V1 Требуется определить момент сил давления воды на стенку канала относительно оси вращения турбины. U2 2 V2 r1 r2 В уравнении моментов исключаются а) все внутренние силы, т. е. взаимные давления внутри жидкости; б) давления между жидкостью и внешней и внутренней поверхностью колеса; б) реакции опор оси турбины; в)если ось вертикальна, то исключается вес воды и самого колеса. 9. Формула Эйлера для турбины: вывод Q объем жидкости, протекающей через канал в единицу времени Q S1V1 sin 1 S2V2 sin 2 1 V1 1) Изменение момента количеств движения за время dt dK K K Qdt V2 r2 cos 2 V1r1 cos 1 m 2) Действующие силы: реакция стенок канала dK M dt U i ri U1 M Q V2 r2 cos 2 V1r1 cos 1 U2 2 V2 r1 r2 10. Опыты со скамейкой Жуковского Примеры: переворот падающей кошки, вращение прыгуна в воду, стабилизация вращения космического аппарата 11. ДУ вращения твердого тела вокруг неподвижной оси K z I z dK z M ze dt d Iz M ze dt m dv z Fze dt Произведение момента инерции тела на его угловое ускорение равно сумме моментов всех сил, приложенных к телу. Полная аналогия с 3-м законом Ньютона Момент инерции тела представляет меру его инерции во вращательном движении. Замечание: При вычислении главного момента всех внешних сил относительно оси вращения нужно учитывать, что реакции идеальных (без трения) опор в уравнение не войдут, так как линии их действия пересекают ось вращения. Если же опоры создают моменты трения, то их необходимо учитывать. 12. Пример: время разгона электродвигателя Задача: К ротору электромотора приложен вращающий момент M вр , изменяющийся по закону M вр M 0 , где M вр и некоторые положительные постоянные, характеризующие двигатель (постоянная называется крутизной характеристики мотора), а - угловая скорость ротора. Определить закон изменения угловой скорости в период разгона ротора, если I его момент инерции относительно оси вращения равен d I M 0 t M0 M0 dt I 1 e уст (0) 0 уст tпер I ln 20 3 0.95 уст I t 0 tпер 13. ТИМКД для относительного движения: проблема О –неподвижный центр С –центр масс системы Q –произвольным образом движущаяся геометрическая точка mi – одна из точек системы dK O MOe dt Вопрос: Можно ли записать аналог ТИМКД для точки Q, взятой в качестве центра? Если Q движется равномерно и прямолинейно относительно О, то ответ очевиден: форма записи не изменится. Ну а что в общем случае? 14. ТИМКД для относительного движения: решение Ответ: dK Q dt MQe M rQ w Q Доказательство: K Q mi ri rQ v i vQ i dK Q dt mi ri rQ v i vQ i ri rQ mi v i i Важное следствие: Fie Fii m r r v v m r v m r v i i Q i i Q i Q i i i Q Q i MQe Mr v Q MrQ vQ MQe M rQ r w Q Форма записи ТИМКД при Q=C сохраняется rQ