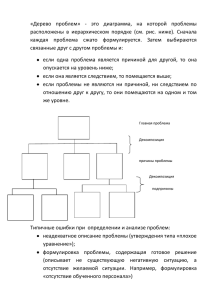
Координирование путем «прогнозирования взаимодействий».
реклама

5.2. Формализация иерархических
понятий
5.2.1. Координация
Координация - обеспечение и
поддержание взаимодействия между
вышестоящим элементом и каждым из
нижестоящих для достижения большей
согласованности деятельности.
Существуют два возможных момента
времени для координации нижестоящих
элементов:
1. Вмешательство до принятия
решения.
2. Вмешательство после принятия
решения и следующие варианты
организации взаимодействия элементов
нижестоящего уровня:
путем «прогнозирования
взаимодействий»;
путем «оценки взаимодействий»;
путем «развязывания взаимодействий»;
путем «наделения ответственностью»;
путем «создания коалиций».
Координирование путем
«прогнозирования взаимодействий».
Вышестоящий элемент посылает
нижестоящим элементам значения
будущих связующих сигналов.
Нижестоящие элементы начинают
вырабатывать свои локальные решения
в предположении, что связующие сигналы,
которые к ним поступят, окажутся именно
такими, какими их предсказал
вышестоящий элемент.
Координирование путем «оценки
взаимодействий».
Вышестоящий элемент задает
диапазон значений для связующих
сигналов.
Нижестоящие элементы рассматривают
эти сигналы как возмущения, которые
могут принимать любое значение в
заданном диапазоне.
Координирование путем
«развязывания взаимодействий».
Элементы нижестоящего уровня
трактуют связующий сигнал как
дополнительную переменную решения.
Они решают свои задачи так, как если бы
связующие сигналы можно было выбрать
произвольно.
Координирование типа «наделения
ответственностью».
Элементы нижестоящего уровня знают
о наличии других элементов, также
принимающих свои решения на том же
уровне. Вышестоящий элемент снабжает
нижестоящие элементы моделью
зависимости между его действиями и
откликом системы.
Координирование путем «создания
коалиций».
Элементы нижестоящего уровня знают
о существовании других решающих
элементов на том же уровне.
Вышестоящий элемент определяет,
какого рода связи разрешены между
ними. Это приводит к коалиционным или
конкурентным отношениям между
нижестоящими элементами.
Первый уровень (регуляторы S1 и S 2 )
управляют объектами P1 и P2 подавая
на вход их управляющие воздействия
соответственно u1 и u2 .
Второй уровень (координатор S 0 )
управляют регуляторами S1 и S 2 подавая
на них координирующие воздействия –
соответственно 1 и 2 .
Вмешательство координатора S 0
проявляется в том, что от значений 1
и 2 зависят управляющие воздействия
u1 и u2 и это обозначается в виде
u1 ( 1 ) и u2 ( 2 ) .
В общем случае u1 и u2 могут зависеть
одновременно от 1 и 2 , тогда это
обозначается как u1 ( ) и u2 ( ) ,
где { 1 , 2 }.
Для осуществления процесса
координации существенное значение
имеют величины 1 и 2 , характеризующие
перекрестные связи между объектами
управления P1 и P2 .
Текущие значения этих величин 1 и 2
передаются координатору путем
сопоставления их со значениями 1 ( ) и
2 ( ) .
Ошибка рассогласования
1 1 1 ( )
2 2 2 ( )
используется для построения алгоритма
функционирования координатора S 0 .
Замечание. При исследовании сложных
иерархических систем решение задач при
переходе от уровня к уровню все более и
более затрудняется, так как приходится
оперировать все с менее и менее
достоверный информацией.
5.2.2. Декомпозиция.
Принцип декомпозиции
(децентрализации) состоит в разбиении
системы на подсистемы обладающие
требуемыми свойствами.
Рассмотрим некоторые наиболее часто
применяемые стратегии декомпозиции.
Функциональная декомпозиция
базируется на анализе функций системы.
При ставится вопрос, что делает
система, независимо от того как она
работает. Основанием разбиения на
функциональные подсистемы служит
общность функций, выполняемых
группами элементов.
Декомпозиция по жизненному циклу.
Признак выделения подсистем –
изменение закона функционирования
подсистем на разных этапах цикла
существования системы «от рождения до
гибели».
Декомпозиция по физическому
процессу.
Признак выделения подсистем – шаги
выполнения алгоритма функционирования
подсистемы, стадии смены состояний.
Применяется эта стратегия только тогда,
когда целью модели является описание
физического процесса как такового.
Структурная декомпозиция.
Признак выделения подсистем –
сильная связь между элементами по
одному из типов отношений (связей),
существующих в системе (логических,
информационных, иерархических,
энергетических и т.п.).
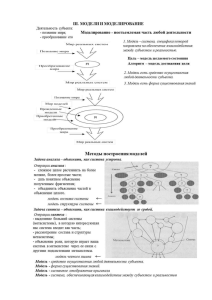
На рисунке представлены потоки
информации, которые характерны при
декомпозиции организационных систем.
Процесс корректировки указаний и
предложений повторяется до полного
согласования.
Различают следующие виды
структурной декомпозиции:
• структурная декомпозиция
затрат;
• структурная декомпозиция
продукта.
Математическое исследование
указанных структурных декомпозиций
получили развитие в методах
Данцга - Вульфа (американские ученые) и
Корнаи - Липтака (венгерские ученые).
Декомпозиционный метод ДанцигаВульфа был разработан Дж. Данцигом и
Ф. Вульфом (США) в 1960 г.
В этом методе центр спускает
информацию в виде цен, а получает них
в виде предполагаемых объемах затрат
и выпусков.
Этот метод относиться к задачам
линейного программирования, в которых
искомые переменные группируются в
блоки, связанные в единую задачу.
В методе Корнаи-Липтака центр
спускает план в натуральных
показателях, а информация в форме
оценок в центр поступает от
предприятий.
5.2.3. Агрегация
Агрегация - процесс объединения
отдельных подсистем с известными
характеристиками в одну систему.
Таким образом агрегация может
рассматриваться как противоположность
декомпозиции.
Пример. Управляющее устройство УУ
(рис. 5.12) получает от системы высшего
уровня некоторое количество ресурсов
A,B,…,P и распределяет их между
объектами управления M i , i 1, n .
Задача состоит в определении таких
*
*
*
значений Ai , Bi ,, P i , i 1, n переменных
Ai , Bi ,, Pi , которые максимизируют
суммарный выход
n
Y Yi max
i 1
при соблюдении условий
n
n
i 1
i 1
Ai A , Bi B ,
Ai 0 ,
Bi 0 ,
В рассмотренном случае агрегации
предполагается, что выходные эффекты
Yi аддитивным образом содействуют
достижению общей цели Y .
Отметим, что не при любом выборе
агрегированных переменных от исходной
модели можно перейти к адекватной
агрегированной модели, т.е. к такой
модели, состояние выходов которой
совпадает с агрегатными состояниям
выходов исходной модели.
В тех случаях, когда построенная
агрегированная модель адекватна
исходной, говорят, что агрегатирование
совместно.