Глава I. ОСНОВЫ ОБРАБОТКИ РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА
реклама

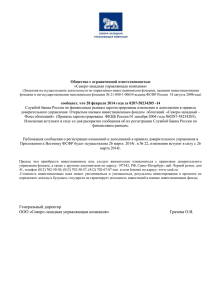
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ "МАТИ" - РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ им. К.Э. ЦИОЛКОВСКОГО В.С. АКИНЬШИН, Ю.В. ГРУЗДЕВ, М.В. РЫЛЬСКАЯ ФИЗИЧЕСКИЙ ПРАКТИКУМ. МЕХАНИКА Учебное пособие Утверждено Учебно-методическим советом университета в качестве учебного пособия для студентов всех специальностей Москва 2003 Виктор Сергеевич Акиньшин Юрий Викторович Груздев Мария Владимировна Рыльская ФИЗИЧЕСКИЙ ПРАКТИКУМ. МЕХАНИКА Учебное пособие Компьютерная верстка О.В. Чибисова Редактор Подп. в печ. 17.11.03 Заказ №229 М.А. Соколова Объём усл. печ. л. 6,2 Тираж 100 экз. Уч. изд. 17,6 Издательский центр МАТИ" - Российского государственного технологического университета им. К.Э. Циолковского, Берниковская наб. 14 2 ПРЕДИСЛОВИЕ Учебное пособие состоит из трех глав и Приложения. Первая глава носит вводный характер. В ней рассмотрены основные виды погрешностей измерения и даны рекомендации по обработке результатов эксперимента. Вторая и третья главы содержат руководства к 11 лабораторным работам цикла "Механика". Каждое руководство состоит из цели работы, теоретических основ физических явлений, наблюдаемых в работе, описания экспериментальной установки, а также подробного описания последовательности действий при проведении эксперимента. Кроме того, к каждой работе даны 30 контрольных вопросов для самоконтроля студента. В Приложении приведена таблица коэффициентов, позволяющих вычислять полуширину доверительного интервала (абсолютную погрешность) измеряемой величины. Руководства к лабораторным работам №№ 4, 8, 10, 11 написаны В.С. Акиньшиным; глава 1 и руководства к работам №№ 1, 2, 3, 5, 6, 7 написаны Ю.В. Груздевым; руководство к работе № 9 написано М.В. Рыльской. Авторы выражают глубокую благодарность всем преподавателям и сотрудникам кафедры "Физика", участвовавшим в обсуждении методики лабораторных работ цикла "Механика" и в подготовке экспериментальных установок, особо отмечая выдающийся вклад инженера Б.В. Зверлова в работу по постановке экспериментов. 3 Глава I. ОСНОВЫ ОБРАБОТКИ РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА ИЗМЕРЕНИЯ И ПОГРЕШНОСТИ ИЗМЕРЕНИЙ В каждой лабораторной работе по курсу "Физика" студент измеряет одну или несколько величин. Измерение называется прямым, если измеряемая величина непосредственно сравнивается с эталоном. Такое сравнение, как правило, происходит с помощью измерительного прибора. Например, длина тела измеряется с помощью микрометра или штангенциркуля, сила тока измеряется амперметром и т.д. Результат косвенного измерения является известной функцией величин, получаемых с помощью прямых измерений. В процессе прямого измерения получают ряд наблюдений х1, х2, … , хn измеряемой величины х. Результаты отдельных наблюдений содержат погрешности измерений и нуждаются в дополнительной обработке. Виды погрешностей: случайные, систематические, промахи. СЛУЧАЙНЫЕ ПОГРЕШНОСТИ При наличии случайных погрешностей результат отдельного наблюдения хk измеряемой величины х является случайной величиной. В этом случае результаты наблюдений х1, х2, … , хn одной и той же величины х различны. В качестве результата измерения принимается среднее арифметическое значение результатов наблюдений: n x x1 x 2 ... x n i 1 i x . (1.1) n n Предел результата измерения при n называется математическим ожиданием : im x . (1.2) n Случайную величину х, являющуюся результатом отдельного наблюдения, можно задать с помощью функции распределения f(х) (функции плотности вероятности): dP dP f x dx , f x или (1.3) dx где dP - вероятность попадания случайной величины в интервал (х, х+dx) шириной dx. Если случайная величина зависит от большого количества неконтролируемых изменяющихся причин, то она подчиняется нормальному распределению или распределению Гаусса. Функция распределения Гаусса для случайной величины х с математическим ожиданием описывается формулой: 4 f x x 2 1 2 e 2 , (1.4) 2 где 2 D - дисперсия распределения. Величина D называется стандартным или среднеквадратичным отклонением. График функции распределения Гаусса показан на рис.1. Математическое ожидание f x определяет положение оси симметрии кривой распредеf max ления, а величина характеризует разброс х относительно 0,6f max . С учетом формулы (1.3) вероятность Р попадания результата наблюдения х в интервал (х1, х2) равна Рис.1.1 X x2 Px1 x x 2 dPx x1 x2 f x dx . x1 Рассмотрим интервал, в центре которого находится математическое ожидание , а полуширина равна x k P , (1.5) где k P - некоторое число. Вероятность Р наблюдения случайной величины х, подчиняющейся нормальному распределению, в таком интервале определяется формулой: k P x 2 dx P k P x k P exp 2 2 2 k P (1.6) kP 2 t 1 exp dt . 2 0 2 Вычисление интеграла в формуле (1.6) показывает, что при kP = 1,0 вероятность Р = 0,68, т.е. 68% результатов наблюдений лежат внутри интервала ( , ). Соответственно, при kP = 2,0 получим Р = 0,95, а при kP = 3,0 вероятность Р = 0,997. Пусть наличие случайных погрешностей приводит к тому, что результат наблюдения х измеряемой величины подчиняется нормальному распределению. Параметры и этого распределения экспериментатор не знает. В процессе измерения получают n результатов наблюдений: х1, х2, … , хn, т.е. полу5 чают некоторую выборку значений х из генеральной совокупности допустимых значений. Определяя результат измерения x по формуле (1.1), находят выборочную оценку величины . Выборочную оценку дисперсии нормального распределения результатов наблюдений получают по формуле 1 n x i x 2 , Dx S2 x (1.7) n 1 i 1 где S(х) - выборочная оценка стандартного отклонения результата наблюдения; n - число наблюдений. Если результат отдельного наблюдения х является случайной величиной, подчиняющейся нормальному распределению с дисперсией D(х), то результат измерения x , определяемый по формуле (1.1), также подчиняется нормальDx ному распределению с дисперсией D x . Соответственно, выборочная n оценка стандартного отклонения результата измерения равна n 1 x i x 2 . S x D x (1.8) n n 1 i 1 Теоретически показано, что для каждой вероятности Р (меры доверия) можно построить такой доверительный интервал ( x x сл , x x сл ), что математическое ожидание случайной величины х окажется внутри этого интервала с вероятностью Р. Полуширина такого доверительного интервала определяется формулой: x сл t P S x , (1.9) где S( x ) находим по формуле (1.8), а t P - коэффициент Стьюдента, величина которого зависит от вероятности Р и числа степеней свободы (см. таблицу Приложения). Число степеней свободы связано с числом наблюдений n формулой: n 1. Можно показать, что в формуле (1.5) коэффициент (1.10) k p t p . При наличии только случайных погрешностей запись результата измерения: x x сл . СИСТЕМАТИЧЕСКИЕ ПОГРЕШНОСТИ Величину некоторых систематических погрешностей можно определить теоретически или экспериментально. Такие оценки называются поправками. Результаты наблюдений исправляют на величину поправок. Но существуют такие систематические погрешности (например, погрешность измерительного прибора, погрешность округления и др.), которые нельзя найти в виде поправки. 6 Погрешность измерительного прибора задается в виде предельной или абсолютной погрешности или относительной погрешности (класса точности прибора). Класс точности прибора - это выраженное в процентах отношение предельной погрешности прибора к максимальному значению хmax измеряемой величины: 100 % . x max В частности, для электроизмерительных приборов существуют восемь классов точности: 0,02; 0,05; 0,1; 0,2; 0,5; 1,0; 2,5; 4,0. Отсюда предельное значение абсолютной погрешности: x max . 100 % Итак, погрешность прибора дается в виде предельного значения . В случае нормального распределения вероятность наблюдения величины х, для которой x >3, равна 0,3%, т.е. отклонение 3 от среднего можно считать значением 3=. . (1.11) 3 Тогда, учитывая формулы (1.5), (1.10) и (1.11), ширину доверительного интервала систематической погрешности прибора можно записать в виде: (1.12) пр k P k P t p . 3 3 При измерении совершается погрешность округления. Если цена деления шкалы прибора равна h, то предельная ошибка округления равна h/2. Можно показать, что полуширина доверительного интервала, связанного с погрешностью округления, определяется формулой h (1.13) окр P , 2 где Р - доверительная вероятность. В некоторых случаях ошибка измерения связана с субъективной реакцией экспериментатора. Например, при измерении промежутка времени ручным секундомером возникает ошибка, вызванная запаздыванием реакции экспериментатора. Можно показать [5], что стандартное отклонение субъективной ресуб 0,3 с. акции В соответствии с формулой (1.5) полуширина доверительного интервала равна (1.14) x суб k p суб t p суб . Отсюда, 7 ПРОМАХИ Промахи возникают в результате грубых ошибок экспериментатора или сбоев измерительного прибора. В этих случаях, как правило, результат наблюдения сильно отличается от других результатов, что используется для выявления промахов. Простейший метод называется "правилом 3", или "правилом 3S( x )". Если результат отдельного наблюдения является случайной величиной, удовлетворяющей нормальному распределению, то вероятность появления результата наблюдения, отличающегося от математического ожидания на величину, превышающую 3, равна P = 0,0027. Поэтому более вероятно, что появление такого результата наблюдения является промахом. В качестве величин и принимаются их выборочные оценки <х> и S(<х>), определяемые формулами (1.1) и (1.7). В литературе [4,7] приведены и другие методы выявления промахов. Выявленные промахи не учитываются при получении результата измерения. ПРЯМЫЕ ИЗМЕРЕНИЯ При обработке результатов прямого измерения рекомендуется следующая последовательность действий: 1. Полученные результаты наблюдений прямого измерения исправляют на величину поправок (оценок некоторых систематических погрешностей). Выявляются и отбрасываются промахи. 2. По формуле (1.1) получают результат измерения <х>. 3. Если результаты отдельных наблюдений различны, то по формуле (1.9) получают полуширину хсл доверительного интервала случайных погрешностей. Предварительно по формуле (1.8) определяют выборочную оценку S(<х>) стандартного отклонения результата измерения, а по таблице Приложения находят коэффициент Стьюдента t p по доверительной вероятности Р и числу степеней свободы n 1 (n - число наблюдений). 4. По формулам (1.12), (1.13), (1.14) определяют полуширину доверительных интервалов неучтенных систематических погрешностей. Результирующую полуширину доверительного интервала х вычисляют по формуле: 2 2 x x сл x пр x окр ... . (1.15) Если в формуле (1.15) сравнение минимальной величины хмин с максимальной величиной хмакс показывает хмин<0,3 хмакс, то меньшей величиной хмин можно пренебречь. 5. Результат прямого измерения записывают в виде доверительного интервала: <x> х, Р. 8 Полуширину доверительного интервала х иногда называют абсолютной x погрешностью, а E - относительной погрешностью измеряемой величиx ны х. КОСВЕННЫЕ ИЗМЕРЕНИЯ При косвенном измерении искомая величина является известной функцией f x, y,...,z (1.16) переменных x, y, …, z, получаемых экспериментально с помощью прямых измерений. Но прямые измерения не позволяют точно определять математические ожидания измеряемых величин. С некоторой вероятностью Р математические ожидания принадлежат доверительным интервалам: <x> x; <y> y; …; <z> z. В формулу (1.16) подставляют средние значения доверительных интервалов, т.е. результат косвенного измерения вычисляют по формуле: f x , y ,..., z . (1.17) Используя в качестве переменной х результат измерения <x>, совершают перенос ошибки, максимальное значение которой равно полуширине доверительного интервала х. Это вызывает изменение на величину , определяемую формулой f x , x если х - малая величина в сравнении с х. В случае нескольких независимых переменных х, у, …, z результат вычисления по формуле (1.17) приводит к максимальной ошибке 2 f f f x 2 y 2 ... z 2 , (1.18) x y z которую можно считать полушириной доверительного интервала величины . Формулы (1.17) и (1.18) определяют результат косвенного измерения: <> . 2 2 СОВМЕСТНЫЕ ИЗМЕРЕНИЯ. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ Пусть переменная величина у, являющаяся функцией переменой величины х, измеряется при n различных значениях х, т.е. получают n эксперимен9 тальных точек: (х1, у1); (х2, у2); …(хn, уn). Будем считать, что зависимость у от х является функцией y f x , 1 , 2 ,..., m , вид которой зависит от параметров 1, 2, …, m. Величину этих параметров находят из условия минимума суммы квадратов: n S y i f x i , 1 , 2 ,..., m . 2 i 1 Отсюда и название рассматриваемого метода. Из условия минимума S следует система уравнений S (i=1, 2, …, m) , (1.19) 0 i решая которую находят значения параметров i . Будем считать, что зависимость между х и у является линейной: y x . Тогда n S y i x i . 2 (1.20) i 1 Подставляя сумму квадратов S, определяемую формулой (1.20) в уравнения (1.19) и решая их, найдем такие значения А и В параметров и , при которых сумма (1.20) минимальна, т.е. минимальна сумма квадратов отклонений экспериментальных точек ( x i , y i ) от прямой линии y А Вx . Получим формулы: xy x y A y B x ; ; (1.21) B 2 2 x x S y n 1 y i A Bx i 2 ; n n 2 i1 SA S y SB S y x x2 x2 x 2 2 x 2 ; , где скобки x означают среднее арифметическое величины х по всем n экспериментальным точкам (см. формулу 1.1). В формулах S(B) и S(A) - это выборочные оценки среднеквадратичных отклонений величин В и А. Отсюда полуширина B доверительного интервала для вероятности Р выражается с помощью коэффициента Стьюдента: B t P SB , где число степеней свободы n 2 (n - число экспериментальных точек). Если значения x i большие, то вычисления по формулам (1.21) требуют высокой точности. Для уменьшения ошибок вычислений можно начало координат по оси Х перенести в точку x . 10