Ш.Я. Вахитов, Я.Ш. Вахитов, И.Н. Остроухов ГЛАВА 2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
реклама

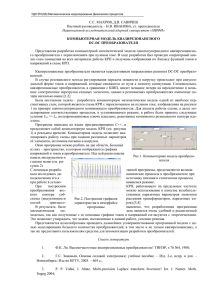
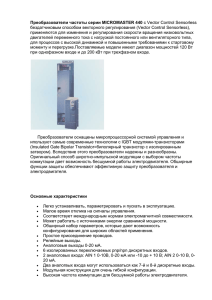
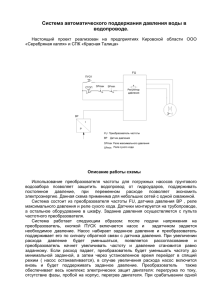
Ш.Я. Вахитов, Я.Ш. Вахитов, И.Н. Остроухов ГЛАВА 2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 2.1. Классификация электромеханических преобразователей Обязательным элементом (узлом) электроакустического аппарата (ЭАА) является устройство, осуществляющее преобразование колебательной энергии из одного вида в другой: электрической в механическую и обратно. Такое устройство называется электромеханическим преобразователем или, кратко, ЭМП. Всякий преобразователь имеет две стороны – электрическую и механическую, и, соответственно, два направления преобразования: электрической в механическую и механической в электрическую. Первый называют – двигателем (рис.2.1, а) второй – преобразователем-генератором (рис.2.1, б). ЭМП могут быть каноническими (истинными) или регуляторами. В канонических преобразователях подводимая энергия преобразуется непосредственно в выходную, которая, по этой причине, не может быть больше подводимой. В преобразователях-регуляторах подводимая энергия используется для управления энергией, получаемой от источника на выходной стороне ЭМП. При этом выходная энергия может существенно превышать входную. Еще одним классификационным признаком ЭМП является их свойство, называемое обратимостью: если один и тот же ЭМП можно использовать как в режиме двигателя, так и генератора, то его называют обратимым (см. рис.2.1). В противном случае преобразователь будет необратимым. Канонические ЭМП, как правило, обратимы, регуляторы – необратимы. Электромеханические преобразования осуществляются с помощью либо магнитного, либо электрического полей. Поэтому тип используемого в ЭМП поля также является классификационным фактором, в соответствии с которым различают: а) преобразователи с магнитным полем: к ним относят электродинамические, магнитные (электромагнитные) и магнитострикционные преобразователи; б) преобразователи с электрическим полем: к ним относятся электростатические преобразователи, подразделяемые на конденсаторные и электретные, и электрострикционные, называемые также пьезоэлектрическими. Каждая сторона преобразователя характеризуется двумя величинами: электрическая – напряжением подаваемого сигнала и и током i; механическая – колебательной силой F и скоростью ξ (см. рис. 2.1). Следовательно, ЭМП можно рассматривать как четырехполюсник, у которого в режиме двигателя входными величинами являются и и i, выходными F и ξ , а в режиме генератора - наоборот. Это позволяет для оценки частотной характеристики ЭМП и его эффективности пользоваться некоторыми представлениями из теории электрических четырехполюсников. Как известно. В электрическом четырехполюснике (рис.2.1) передача сигнала оценивается коэффициентом передачи K : 1 u K 2 Ke j u1 (2.1) где и1 и и2 – соответственно напряжение сигнала на входе и выходе четырехполюсника, K – модуль комплексного коэффициента передачи, φ – сдвиг фазы между и1 и и2. Коэффициент K – величина безразмерная, так как и1 и и2 выражаются в одних и тех же единицах. Численное значение этого коэффициента зависит от структуры четырехполюсника. Например, в четырехполюснике в виде пассивного фильтра с согласованным сопротивлением нагрузки ZН (см. рис.4.11, а) в полосе пропускания K ≈ 1, а за ее пределами K → 0. В трансформаторе с коэффициентом трансформации n =W1/W2 меньшим единицы, коэффициент передачи K >1 (то есть сигнал усиливается по напряжению (см. рис.2.2, б)). Похожим по смыслу коэффициентом Kэм, выражаемым отношением выходной величины к входной, характеризуются и электромеханические преобразователи. Однако здесь этот показатель, называемый коэффициентом электромеханической связи или КЭМС, имеет размерность, так как в ЭМП входные и выходные величины имеют разную физическую природу. Например, в преобразователях-двигателях выходным сигналом служит сила F0, получающаяся на выходе преобразователя при заторможенной механической системе, а входным – ток i, потребляемый ЭМП на электрической стороне. Следовательно K эм F0 i [ н ] . A (2.2) В преобразователях-генераторах КЭМС выражается отношением напряжения и0 на разомкнутой электрической стороне (то есть ЭДС – е) к скорости колебаний ξ - на механической (входной) стороне: K эм e u0 . ξ ξ (2.3) Размерность этой величины В/м/с. Поскольку преобразователь обратим, то соотношения 2.2 и 2.3 как и их размерности приводят к одной и той же величине Kэм. По этой причине при выводе выражений для КЭМС конкретных преобразователей можно будет использовать лишь один из режимов – либо двигательный, либо генераторный, а именно тот, который позволяет получить требуемый результат наиболее коротким и наглядным способом. Отметим, что взаимосвязь выходных величин с входными в большинстве ЭМП носит нелинейный характер (см. главу 1). Однако, эту зависимость обычно стараются линеаризировать, то есть сделать приближенно линейной путем введения определенных ограничений на величины входных колебаний. При 2 нарушении этих ограничений возникают искажения колебаний, называемые нелинейными. 2.2. Электродинамические преобразователи (ЭДП) Устройство и коэффициент электромеханической связи. Электродинамический принцип преобразования базируется на законах электромагнитной индукции, а именно, на следствиях из законов Био и Савара в режиме двигателя и Фарадея в режиме генератора. Согласно первому на проводник длиной l с током i, расположенный в равномерном магнитном поле с индукцией B , действует сила F =Bli . В соответствии с (2.2) в заторможенном проводнике Kэм = F0 / i = Bl . (2.4) Таким образом, КЭМС электродинамического преобразователя определяется произведением индукции магнитного поля на длину проводника и является величиной, не зависящей от частоты. По закону Фарадея на концах разомкнутого проводника длиной l движущегося со скоростью ξ в равномерном магнитном поле с индукцией B , индуцируется ЭДС e = Bl· ξ , откуда, в соответствии с (2.3) можно написать Kэм = e / ξ = Bl , (2.5) что совпадает с выражением (2.4). Отметим, что для получения ЭДС в вольтах, силы – в ньютонах, индукцию следует брать в теслах, а длину в метрах. Чаще всего электродинамические преобразователи реализуются в катушечном (рис. 2.3,а) и ленточном (рис. 2.3,б) вариантах, существенно реже – в виде преобразователя Хейла и изодинамического (подробнее об этом см. в главе 4). Катушечный преобразователь состоит из катушки 1 (несколько слоев провода, намотанного на цилиндрический каркас), помещенной в кольцевом зазоре магнитной цепи (МЦ), включающей постоянный магнит 3 кернового типа с полюсным наконечником 2 и стаканом 4 из мягкой стали, направляющими магнитный поток (на рис. показан прерывистой линией). В результате в воздушном зазоре МЦ создается сильное магнитное поле радиального (по отношению к оси катушки) направления. С помощью упругого подвеса 6 (в виде гофрированного воротника) катушка располагается в середине зазора, не касаясь ни стакана 4, ни керна 2, что обеспечивает ей возможность неискаженных колебаний в осевом направлении. Ленточный ЭДП реализуется в виде тонкой гофрированной ленточки 7 из фольги, помещенной в зазор МЦ, состоящей из подковообразного постоянного магнита 10, полюсных наконечников 9. Концы ленточки зажаты контактами 8. 3 2.3. Электростатические преобразователи Преобразователи с внешней поляризацией (конденсаторные) представляют собой плоский конденсатор (рис. 2.4,а) один из электродов которого выполнен в виде перфорированного диска 2 из металла или металлизированной керамики, а второй – в виде тонкой мембраны 1 из фольги или металлизированной полимерной плёнки. Рассмотрим работу такого преобразователя в простейшем варианте – с металлическими электродом и мембраной. В статическом состоянии ёмкость такого преобразователя С0 (рис. 2.4,б) определяется соотношением C0 ε0 S δ , (2.6) где ε 0 = 8,85ּ10-12 Ф/м – диэлектрическая постоянная вакуума (и, приближённо воздуха) в системе СИ; δ – толщина статического зазора с учётом постоянного смещения мембраны под действием поляризующего напряжения U0; S – площадь электрода или эффективной части площади мембраны (действительная площадь мембраны может быть больше площади электрода). В динамическом режиме мгновенное значение С емкости преобразователягенератора отличается от (2.6), т.к. под действием силы F мембрана приближается или удаляется от электрода на величину ξ её мгновенного смещения, так что C ε0 δ ξ ε0 S ξ δ 1 δ . (2.7) Знаки в этом соотношении соответствуют смещению мембраны в сторону электрода. Предполагается, что нагрузочное сопротивление RН настолько велико, что за время Т одного периода колебания заряд не успевает измениться. Иначе говоря, RН C0 τ 0 TН (ТН – период самого низкочастотного колебания), заряд Q0 является величиной постоянной, т.е.: Q0 U 0 C0 U C U 0 u C0 1 ξ δ . (2.8) Здесь U = U0 – u, u – переменная составляющая напряжения, возникающая в результате изменения емкости преобразователя. Проделав несложные алгебраические преобразования, получим 4 u U0 ξ . δ (2.9) Как видим, переменное напряжение u, возникающее в результате колебаний мембраны, прямо пропорционально её смещению. Поскольку C0 в преобразователях в режиме генератора очень мало (порядка 10 - 50 пФ), сопротивление Rн получается очень большим (порядка тысячи МОм). По этой причине можно полагать, что напряжение u практически не отличается от ЭДС e, так что без существенной погрешности примем u = e. Чтобы получить формулу для КЭМС, надо смещение выразить через скорость колебаний мембраны. Связь между ними (см. курс ФОА) выражается соотношением ξ ξ jω . Подставив значения u и ξ в (2.9), получим e U0 e U0 ξ ; K эм . jωδ ξ jω δ (2.10) Как видим, в отличие от преобразователей с магнитным полем КЭМС электростатического преобразователя является величиной частотно-зависимой и мнимой. Последнее означает, что в процессе преобразования происходит сдвиг по фазе между ЭДС и скоростью колебаний мембраны ξ на угол φ= π 2 . Преобразователи с внутренней поляризацией (электретные). В 1896 году английский учёный О. Хевисайд сделал предположение о возможности существования поляризованного диэлектрика, обладающего способностью удерживать электрический заряд. В двадцатых годах прошлого (20-го) века японским физиком М.Ягучи был найден такой диэлектрик. По аналогии с английским словом magnet (постоянный магнит) этот диэлектрик, представляющий смесь карнаубского воска и канифоли, был назван electret (электрет). В настоящее время известен широкий класс веществ, пригодных для изготовления электретов: различные полимеры – поливинилхлорид, поливинилфторид и др.; неорганические диэлектрики – сера, нафталин, титанаты магния, цинка, кальция, бария и др.; сложные диэлектрики, получаемые из смеси разных веществ. Электреты характеризуются максимальной плотностью σ (Кл/м2) заряда на поверхности и временем сохранения её, называемым временем жизни (разумеется, с определённым допуском на её уменьшение). Величина σ зависит главным образом от свойств материала, определяющих его способность «связывать» или «удерживать» заряд. Однако на величину заряда существенно влияют и технологические факторы – применяемый способ поляризации, величина поляризующего напряжения U0, длительность его воздействия др. Поэтому разброс достигаемых при изготовлении электретов значений поверхностной плотности очень велик – от 10-6 до единиц Кл/м2. 5 Время жизни электретов тоже бывает очень разным – от нескольких дней до нескольких десятков лет. Для одного и того же электретного материала это время также не однозначно, так как в значительной степени определяются эксплуатационными условиями (температурой и влажностью воздуха, наличие радиации и др.) и конструкцией устройства, в котором электрет используется. В 60 годы прошлого века были найдены промышленно применяемые электретные материалы, способные длительное время сохранять заряд, а также способы их поляризации применимые в промышленности. После этого электреты нашли широкое применение в электроакустической аппаратуре, особенно в микрофонах, так как избавляют от необходимости использования громоздких и крайне неудобных в эксплуатации электропитающих устройств. Промышленный выпуск электретных микрофонов с начала 70-х годов был начат в Японии и практически одновременно, в нашей стране, США, Германии. Первые отечественные промышленные модели электретных микрофонов были созданы на базе фторполимерных плёнок во ВНИРПА им А.С. Попова. В электростатических преобразователях электретный элемент реализует либо в мембране, в виде её плёночной основы с нанесённым металлическим слоем (рис. 2.5а), либо в неподвижном электроде, в виде нанесённого на него (или наклеенного) слоя электретного материала (рис. 2.5, б). На рисунках толщина слоя электретного материала обозначена символом ∆э, а ширина воздушного зазора – δ1. Выведем количественное соотношение для электретного преобразователя на примере мембранного варианта его конструкции с применением моноэлектрета (см. рис. 2.5,а) с плотностью заряда σ . Металлический слой мембраны соединён с электродом через резистор Rн, не препятствующий постепенному «перетеканию» постоянного заряда. Следовательно, на электроде также будет индуцирован заряд с поверхностной плотностью σ ин , а в воздушном зазоре образуется поле с искомой напряжённостью Е1. Чтобы его найти, воспользуемся одним из основных соотношений теории электрического поля, согласно которому скачок нормальной составляющей вектора электрической индукции поля при переходе через заряженную поверхность равен плотности заряда этой поверхности. В случае поверхностной поляризации методом «холодной плазмы» эта индукция возникает в мембране на границе «электрет - воздух». E1 σ ε0 напряженность поля на этой границе. Эта напряжённость действует на всей толщине воздушного зазора и создает поляризующее напряжение U 0 E1δ1 σ δ ε0 1 . (2.11) Эта формула позволяет вычислить так называемое эквивалентное поляризующее напряжение U0 электретного преобразователя. Пользуясь этой величиной можно применять для расчёта электретных преобразователей все соотношения, полученные ранее для электростатических преобразователей с внешней поляризацией. Например, для коэффициента электромеханической связи имеем 6 K эм U0 1 σδ1 jωδ jωδ ε0 . (2.12) Одним из существенных преимуществ электретных преобразователей является то обстоятельство, что при одинаковых значениях U0 в электретных системах можно использовать меньше значение зазора δ1 и, стало быть, реализовать большую чувствительность, не опасаясь «прилипания» мембраны к электроду. Объясняется это тем, что заряд электрета находиться в связанной форме, вследствие чего не может «стекаться» к центру мембраны, когда она, под действием поляризующего напряжения, прогибается в сторону электрода и её центр оказывается наиболее близкой к электроду точкой. 2.4. Другие типы преобразователей Электродинамические и электростатические преобразователи нашли наиболее широкое применение в профессиональной и бытовой электроакустической аппаратуре. Однако некоторые типы электромеханических преобразователей до сих пор также находят применение в различных отраслях техники, например в аппаратуре связи (угольные, электромагнитные), в качестве звукоснимателей и ларингофонов (электромагнитные, пьезоэлектрические). Поэтому кратко остановимся на принципах их работы. Первым получил распространение угольный преобразователь, который до сих пор используется в качестве микрофона в стационарных телефонных аппаратах. Это необратимый преобразователь-регулятор, принципиальное устройство которого показано на рис. 2.6,а. При воздействии звукового давления на его диафрагму 1 она начинает колебаться. Соответственно изменяется сила сжатия зёрен угольного порошка 2, в связи с чем, изменяется сопротивление Rj между электродами 3 и 4. Следовательно, при постоянстве электрического напряжения источнике U0 изменяется ток в цепи первичной обмотки трансформатора, у которого кроме постоянной составляющей появляется переменная. На зажимах вторичной обмотки будет возникать переменное напряжение и форма временной кривой которого будет более или менее точно отображать форму кривой звукового давления p, воздействующего на диафрагму с помощью S. Основное преимущество угольного микрофона – высокая чувствительность, позволяющая его использовать без усилителя. Недостатки, не позволяющие использовать его в профессиональных целях: большая неравномерность частотной характеристики (узкий диапазон частот), значительные нелинейные искажения и шум из-за разрыва и восстановления контактов между зёрнами угольного поршня. После угольного преобразователя появился электромагнитный (рис. 2.6,б), принцип действия которого основывается на явлении притяжения магнитами предметов, изготовленных из ферромагнитных материалов – железа, ни7 келя, кобальта. Магнитный поток Ф0 создаётся постоянным магнитом 3 и через полюсные наконечники 2 действует на якорь 1, притягивая его. Если диафрагму (якорь) 1 из такого материала заставить колебаться, например, под воздействием силы звукового давления F, меняется магнитное сопротивление системы, а значит и магнитный поток через витки обмотки на полюсных наконечниках. В результате на зажимах обмотки создаётся e – ЭДС звуковой частоты. С другой стороны, если к катушкам приложить внешнее переменное напряжение u, то помимо постоянного магнитного потока Ф0, будет создан переменный Фn, под действием которого якорь начнёт колебаться. Следовательно, преобразователь будет работать в режиме двигателя. Для нормального функционирования преобразователя его линеаризуют, т.е. добиваются, чтобы Фn <<Ф0. Электромагнитный преобразователь прочен (подвижный элемент – металлическая пластина), надёжен, стабилен в работе. Недостатками его являются большая неравномерность частотной характеристики (узкий частотный диапазон) и значительные нелинейные искажения. Поэтому он находит применение практически только в аппаратуре связи (военной, морской, авиационной), а в режиме излучателя (двигателя) используется в телефонных и слуховых аппаратах. Для приёма речи в условиях сильного окружающего акустического шума применяются ларингофоны. Это особый вид электромеханических преобразователей-генераторов, воспринимающих не звуковые волны, а механические колебания стенок речевого тракта, возникающие при произнесении звуков. По принципу преобразования сейчас применяются электромагнитные ларингофоны, раньше - угольные. В отличие от микрофонов, в ларингофонах нет диафрагм. Консоли ларингофонов (обычно применяются парой) заключены в закрытые корпуса и прикрепляются с передней стороны в области гортани. Корпуса ларингофонов колеблются в такт со стенками шеи, а подвижный элемент (якорь) вследствие инерции перемещается относительно корпуса. Неравномерность частотной характеристики ларингофонов в диапазоне 300-3000 Гц невелика, а величина выходного сигнала примерно такая же, как в электромагнитных микрофонах. Ларингофоны плохо передают высокочастотные форматы речи, в связи с чем разборчивость речи не может быть вполне удовлетворенной, поэтому их целесообразно применять только в условиях больших уровней (порядка 130дБ) окружающего шума. Существует еще один тип преобразователей с магнитным полем - магнитострикционный, применяемый преимущественно в гидроакустической аппаратуре и ультразвуковой технике. Поэтому ограничимся здесь изложением самых общих сведений. Сущность магнитострикционного эффекта заключается в том, что под действием внешнего магнитного поля, создаваемого, к примеру, катушкой с числом витков W и током i происходит изменение размеров ферромагнитного тела, то есть его деформация. Количественной мерой этого эффекта является зависимость относительного удлинения (Δl) стержня МСП от напряжения внешнего (намагничивающего) поля. Удлинение, происходящее вдоль силовых линий намагничивающего поля, не зависит от его направления, так что магнитострикционный эффект не имеет полярности. Поэтому переменное поле с частотой намагничивающего тока f вызывает деформацию стержня с частотой 2f. Когда это нежелательно, прибегают к поляризации, то есть помимо пе8 ременного поля создают постоянное (с помощью постоянного тока или магнита, как и в случае электромагнитного преобразователя). Отметим здесь, что все преобразователи с магнитным полем (электродинамический, электромагнитный, магнитострикционный) называют иногда преобразователями скорости, т.к. их выходное напряжение u (в режиме генератора), пропорционально скорости колебаний ξ подвижного элемента (а развиваемая сила в режиме двигателя – току i). Преобразователи с электрическим полем, а также угольный, называют преобразователями смещения (т.к. u пропорционально колебательному смещению ξ). Еще один тип преобразователей с электрическим полем, используемых в электроакустической аппаратуре (чаще – гидроакустической) называют пьезоэлектрическим. Этот тип преобразователей основан на явлении электрострикции, называемом также пьезоэффектом, выражающемся в способности некоторых материалов изменять свои линейные размеры (деформироваться) под действием электрического поля (обратный пьезоэффект) или, наоборот, создавать такое поле при деформации внешней механической силой (прямой пьезоэффект). Этот эффект, в отличие от магнитострикции, обладает полярностью, т.е. направление деформации (сжатие или растяжение) меняется при изменении направления электрического поля и наоборот. Способностью к электрострикции обладают некоторые природные, а также искусственные кристаллические материалы, например, кристаллы кварца, турмалина, сегнетовой соли и др. Перечисленные материалы являются монокристаллическими. Однако электрострикционный эффект может быть искусственно создан и в ряде керамических материалов, состоящих из большого числа мелких кристалликов, т.е. обладающих поликристаллической структурой. Пьезоэффект можно создать также в некоторых полимерных материалах. К электрострикционным материалам относятся титанат бария, ниобаты свинца и бария, пленки фтористого поливинилидона и мн. др. Бывает, что направление воздействия электрического поля (электрическая ось) и направление наиболее существенной деформации материала (механическая ось) совпадают. Тогда пьезоэффект называется продольным. Если не совпадают – поперечным. Количественно пьезоэффект характеризуется пьезоэлектрическим модулем d (м/В). Для обозначения типа пьезоэффекта (продольного или поперечного) модулю придают цифровые индексы – d33, d31, d32, соответствующие направлениям осей в трехмерной координатной системе. Использование продольного пьезоэффекта (d33) в электроакустике оказалось неудобным, поэтому в конструкциях электроакустических аппаратов применяют обычно поперечный пьезоэффект, приспосабливая его к деформациям изгиба. На рис. 2.6 (в и г) приведены конструкции пьезопреобразователей на основе биморфного элемента (в) и пьезоплёнки (г). В первом типе преобразователя диафрагма 1 через стержень 2 соединяются с биморфны элементом 3, в виде консоли, один конец которой жёстко закреплён. Сам биморфный элемент изготовляют из двух одинаковых пластин, между которыми помещают тонкий металлический электрод. Переменное напряжение (в режиме двигателя) подаётся между этим внутреннем электродом и электрически соединёнными внешними электродами пластин. Поскольку 9 вектор напряжённости, электрического поля в верхней и нижней пластине будет противоположно направлен, то в то момент, когда верхняя пластина удлиняется, нижняя сжимается и наоборот. В результате возникает момент кручения (или изгиба), и свободный конец консоли совершает колебательное движение. В режиме генератора сила давления, воздействующая на диафрагму 1 через стержень 2 заставляет колебаться свободный конец биморфного элемента 3, что приводит к появлению ЭДС на выходе. Во втором типе преобразователя (см. рис. 2.6, г) в качестве диафрагмы используется полимерная из поливинилиденфторида, которая поляризуется в сильном электрическом поле и приобретает свойства поперечного пьезоэлемента. Такую плёнку 1 металлизируют с двух сторон, с помощью рамки 3 и эластичного пористого материала 4 придают начальную кривизну. При подаче на электроды переменного напряжения звуковой частоты в ней возникает сила, приводящая попеременно к растяжению и сжатию плёнки, что вызывает колебания плёнки в направлении нормальном к её поверхности. Такой преобразователь используется в некоторых моделях головных телефонов и высокочастотных громкоговорителей, в режиме генератора его можно использовать и как микрофон. Действия транзисторных (полупроводниковых) микрофонов (весьма мало распространённых) основано на том, что под воздействием звукового давления на диафрагму, скреплённое с ней остриё, воздействует другим концом на эмиттер полупроводникового триода, изменяет сопротивление эмиттерного перехода через него. Хотя такие микрофоны достаточно чувствительны, но очень нестабильны при изменении окружающей температуры и других факторов. Контрольные вопросы к главе 2 2.1. Что такое Электромеханический преобразователь (ЭМП)? По каким признакам классифицируют ЭМП? 2.2. Что такое коэффициент электромеханической связи (КЭМС). Отношением каких величин определяются КЭМС преобразователей двигателей и генераторов. Покажите, что размерность этих величин одинакова. 2.3. На основании каких физических законов определяется КЭМС электродинамического преобразователя – двигателя и генератора? 2.4. Что такое и как устроен электродинамический преобразователь, какие виды электродинамических преобразователей вы знаете? 2.5. Как устроен электростатический преобразователь – генератор с внешней поляризацией? Выведете соотношение для его КЭМС. 2.6. Как устроен электретный электростатический преобразователь? Каковы особенности его применения, КЭМС? 2.7. Как устроен электромагнитный преобразователь и каковы особенности его применения, КЭМС? Что такое ларингофон и каковы принципы его работы? 2.8. Что такое пьезоэффект? Как устроены пьезоэлектрические преобразователи, применяемые в электроакустической аппаратуре? 10