Электромеханические резистивные преобразователи
реклама

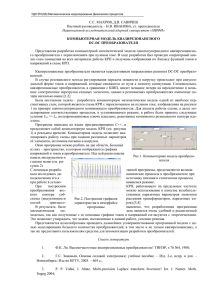
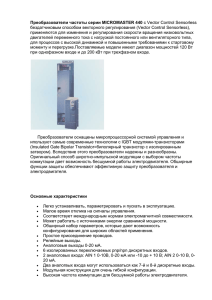
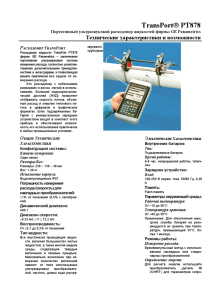
Электромеханические резистивные преобразователи перемещения представлены реостатными и контактными преобразователями. Если у контактных преобразователей выходной величиной является замкнутое или разомкнутое состояние контактов (т.е. выходная величина принимает только дискретные значения), то у реостатных преобразователей выходная величина непрерывна и представляет собой изменение сопротивления, пропорциональное перемещению движка. Изменение сопротивления (при постоянстве всех остальных параметров электрической цепи) может быть однозначно преобразовано в изменение напряжения или тока. В этом заключается основной принцип действия электромеханических резистивных преобразователей перемещения. Контактные преобразователи Контактными называются измерительные преобразователи, в которых измеряемое механическое перемещение преобразуется в замкнутое или разомкнутое состояние контактов, управляющих электрической цепью. Таким образом, естественной входной величиной контактных преобразователей является пространственное перемещение. Простейший контактный преобразователь является однопредельным и имеет одну пару контактов (рис.1-а), замыкание которых происходит в функции измеряемого перемещения, например изменения размера изделия 1. При увеличении размера изделия переместится шток 2, и укрепленный на нем контактирующий элемент 3 войдет в соприкосновение с контактом 4. При этом активное сопротивление между контактами 3 и 4 изменится от бесконечности до малой величины, определяемой значением контактного сопротивления. При контроле размеров чаще всего используются двухпредельные контактные преобразователи с двумя парами контактов (рис.1-б). Встречаются конструкции многопредельных преобразователей с несколькими парами контактов (рис.1-в); контакты могут быть расположены как с обеих сторон контактирующего элемента, так и с одной его стороны. Контактные преобразователи могут работать либо на замыкание (или размыкание) всей цепи, либо на замыкание (размыкание) участка цепи (рис.1- г). Рис.1 Основные типы контактных преобразователей Реостатные преобразователи Принцип действия Реостатным преобразователем называют реостат, движок которого перемещается под действием измеряемой неэлектрической величины. Естественной входной величиной реостатных преобразователей является перемещение движка, а выходной – сопротивление. На рис. 2 показано устройство реостатного преобразователя. На каркас 1 из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса зачищается, и по металлу проволоки скользит щетка 3. Добавочная щетка 5 скользит по токосъемному кольцу 4. Обе щетки изолированы от приводного валика 6. Рис. 2 Устройство реостатного преобразователя 2 Реостатные преобразователи выполняются как с проводом, намотанным на каркас, так и реохордного типа. Чаще всего используется провод из различных сплавов платины, обладающих повышенной коррозионной стойкостью и износостойкостью; применяется также манганин, константан, фехраль. Микропровод позволяет выполнять миниатюрные преобразователи, имеющие габариты до 5х5 мм. Каркас выполняется из керамических материалов, пластмассы, гетинакса, металлов (алюминий, дюраль), покрытых слоем лака или оксидной изоляцией. Каркас должен обладать большой теплоотдачей. Обмотку выполняют из эмалированного или оксидированного провода с последующим покрытием лаком. Следует выбирать материалы проволоки и каркаса так, чтобы их температурные коэффициенты расширения отличались бы незначительно. В противном случае изменение температуры преобразователя может привести к распусканию обмотки или к появлению недопустимых напряжений. Токосъемные щетки выполняют в виде проволок или лент из бронзы, платиноиридиевого сплава и других упругих материалов или в виде ролика. Последний ставят с некоторым перекосом для обеспечения небольшого скользящего трения и зачистки контактной дорожки. В жидкостных реостатах подвижным элементом является ртуть. КЛАССИФИКАЦИЯ РЕОСТАТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПО КОНСТРУКТИВНЫМ ОСОБЕННОСТЯМ Существует большое разнообразие конструкций реостатных преобразователей перемещения. Они могут быть проволочными и непроволочными. Проволочные отличаются высокой точностью преобразования и стабильностью функции преобразования. Их недостатки – низкая разрешающая способность, невысокое сопротивление (до десятков килоом). Указанные недостатки отсутствуют у непроволочных преобразователей, однако они значительно уступают проволочным по точностным характеристикам. Реостатные преобразователи делятся также на преобразователи с линейным и вращательным перемещением подвижного элемента. Наиболее распространенными являются следующие конструкции реостатных преобразователей перемещения: Многообходный преобразователь (рис. 3-а) состоит из кольцевого каркаса,на который равномерно намотана обмотка. При вращении подвижного контакта сопротивление возрастает от нуля до максимальной величины (рис. 3-б). При прохождении контакта вне зоны обмотки сигнал отсутствует. 3 а) б) зона нечувствительности Рис. 3 Многообходный реостатный преобразователь: а) конструкция ; б) характеристика Многооборотный преобразователь (рис. 4) обладает расширенным диапазоном входных величин, достигающим 25-40 оборотов. На алюминиевый спиралевидный каркас наматывается проволочная обмотка. Щетка, совершая вращательное и поступательное движения, скользит по поверхности провода. При равномерной намотке провода статическая характеристика преобразователя имеет линейный характер. щетка Рис. 4 Многооборотный реостатный преобразователь Функциональный преобразователь (рис. 5) обеспечивает реализацию функциональной статической характеристики. Функциональные преобразователи могут иметь профилированную высоту каркаса (рис. 5-а) 4 при постоянной ширине, либо они состоят из ряда сопротивлений (рис. 5-б). шунтируемых при замыкании контактов подвижным контактом. б) а) Рис.5 Функциональные преобразователи: а) с переменной высотой каркаса; б) с шунтированными сопротивлениями Выбирая форму каркаса, можно получить определенную функциональную зависимость между перемещением и выходным сопротивлением. Выходное сопротивление реостатного преобразователя, периметр каркаса p и входное перемещение x связаны между собой зависимостью: X R rw 0 pdx (1) 0 r - сопротивление 1м провода w0 - число витков на единицу длины преобразователя Из заданной зависимости R= (x) можно определить зависимость R= f(x) ФУНКЦИЯ ПРЕОБРАЗОВАНИЯ При перемещении подвижного элемента изменяется сопротивление преобразователя. Выходного сигнал преобразователя можно получать в виде напряжения или тока, как показано на рис.6 5 а) реостатный преобразователь перемещения в напряжение б) реостатный преобразователь перемещения в ток Рис. 6 Реостатные преобразователи перемещения Статические характеристики следующий вид: Rab преобразователей R 8 W h X *X X max d 2 X max U в ых I в ых реостатных U сети U * Rab сети * X R X max U сети X max U сети d 2 Rab 8 W h X имеют (2) (3) (4) где: R - полное сопротивление реостата; Rab – сопротивление реостата, соответствующее перемещению движка на расстояние ab ; W – число витков обмотки (обычно W составляет 100-200, а в прецизионных преобразователях – десятки тысяч); d – диаметр провода обмотки; - удельное сопротивление провода ; h и - высота и ширина каркаса; Xmax – максимально возможное перемещение подвижной части; Uсети - напряжение сети; 6 Согласно формулам (2-4) чувствительность преобразователей можно увеличить за счет увеличения W, увеличения h и , уменьшения d, использования проводов обмоток с большим удельным сопротивлением . Реостатные преобразователи аналогично контактным являются ступенчатыми (дискретными) преобразователями (за исключением преобразователей реохордного типа), поскольку непрерывному изменению входной величины соответствует ступенчатое изменение сопротивления. Источники основной погрешности: загрязнение контактной пары щетка-провод и ее окисление; стирание контактной поверхности; гистерезис щетки преобразователя вследствие нежесткого ее крепления; температура внутреннего нагрева. Источники дополнительной погрешности: погрешность квантования кв 0.5 Rab 0 .5 *100 0 0 *100 0 0 R W (5) влияние внешних магнитных полей на преобразователи с выходным током и напряжением, заключающееся в наведении дополнительной ЭДС в обмотке; колебание частоты питающей сети; колебание напряжения Uсети; влажность воздуха; изменение величины контактного сопротивления при изменении скорости перемещения подвижной части, которое может достигать значительных величин; вибрация, которую уменьшают путем выполнения волосков щетки разной длины (это приводит к различным собственным частотам колебаний). влияние внешней температуры на размеры h, , d и удельное сопротивление ; Суммарная погрешность, вызванная непостоянством параметров преобразователей составляет 0,05-0,1%. Температурная погрешность обычно не превышает 0,1% на 10 градусов. Достоинства реостатных преобразователей перемещения: отсутствие реактивных усилий на подвижную часть; высокая перегрузочная способность; 7 высокий коэффициент эффективности; компактность; возможность применения на постоянном и переменном токе; удобство эксплуатации. Недостатки реостатных преобразователей перемещения: засорение контактной дорожки; недостаточно высокая надежность из-за наличия скользящих контактов; пожароопасность. Реостатные преобразователи перемещения применяются в качестве промежуточных элементов измерительных и регулирующих устройств. Так как многие неэлектрические величины могут быть преобразованы в перемещение (с помощью упругих механических элементов ), то реостатные преобразователи перемещения широко используются в датчиках давления, силы, ускорения, расхода, уровня и т.п. 8