Конференция_Нгуен_Чи_Тхань_Ньан
реклама

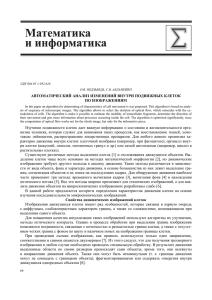
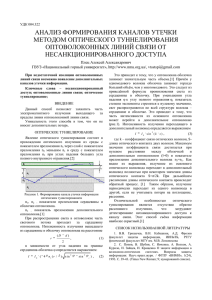
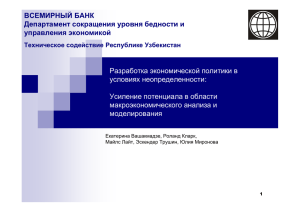
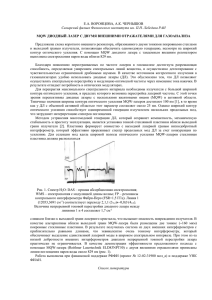
ВЫЧИСЛЕНИЕ ОПТИЧЕСКОГО ПОТОКАМЕТОДОМ ЛУКАСА – КАНАДЕ Нгуен Чи Тхань Ньан, Национальный исследовательский Томский политехнический университет, г. Томск Научный руководитель – Аметова Эвелина Серверовна 1. Введение Задачи автоматического выделения и отслеживания объектов по признаку их движения на изображениях, получаемых от различных видео датчиков, часто возникают при разработке систем видеонаблюдения и систем машинного зрения, предназначенных для мобильных технических средств. На основе последовательности кадров, изображающих трехмерное пространство, необходимо построить изменения, которые происходят с ним с течением времени. Оптический поток Оптический поток– это отображение видимого движения, представляющее собой смещение каждой точки между двумя изображениями. По сути, оптический поток – представляет собой поле скоростей, так как сдвиг точки между двумя изображениями эквивалентен мгновенной скорости. В теории вычисления оптического потока используются следующие определения: Поле движения объекта (ПДО) – это поле реального движения 3D-объекта в пространстве. Поле оптического потока (ПОП) – это проекция реального движения на 2D – поле. 2. Рисунок 1. Проекция движения на двумерное поле Рисунок 2. Соотношение между ПДО и ПОП Пусть I(x,y,t)–интенсивность точки в пикселе (x,y) в момент t на первом кадре. Тогда через интервал времени, точка в пикселе (x,y) будет перемещена на на втором кадре. Допустим, что интенсивность точки не изменяется, тогда: (1) Разложим (1) в ряд Тейлора: (2) Из (1)и (2): Следовательно, Где — Скорости оптического потока в точке (x,y). — частные производные по координатам и времени. Таким образом, пространственным (3) Уравнение (3)– это уравнение оптического потока. Данное уравнение содержит две неизвестные переменные. Следовательно, система уравнений недоопределенная. Вычисление оптического потока – нахождение векторов для оценки движения объекта. 3. Метод Лукаса–Канаде Алгоритм Лукаса-Канаде – один из методов, применяющихся для вычисления оптического потока. Данный алгоритм используется достаточно широко в задачах оценки движения объекта. Алгоритм Лукаса-Канаде является локальным методом вычисления оптического потока, так как обрабатывает пиксели в окрестности определенной точки. Данный алгоритм предполагает, что: a) Смещение точек на двух изображении незначительное. b) Смещение точек в окрестности некоторой точки одинаково. Допустим, что – набор точек в окрестности точки P. Тогда, получаем систему уравнений (4) Обычно набор точек в окрестности точки P ограничен окном c центром P. Проблема включается в том, что чем больше количества точек в окрестности точки, тем больше уравнений будет содержать система(4) для нахождения вектора . Например, для окна 3x3 потребуется решить систему из 9 уравнений. Для решения данной проблемы применяется взвешенный метод наименьших квадратов. Для определения весовых коэффициентов для пикселей на изображении используется функция . Согласно взвешенному методу наименьших квадратов, для нахождения решения необходимо минимизировать невязку: где Тогда, Для нахождения минимума ошибки нулю. Следовательно, получаем: необходимо приравнять Уравнения (5) и (6) могут быть представлены в матричной форме: Пусть: Тогда, Вычисление оптического потока в MatLab. Для вычисления оптического тока методом Лукаса-Канаде воспользуемся библиотекой MatLab «Computer vision system toolbox». Вычислим оптический поток для двух изображений, представленных на рисунке 3. Результат вычисления оптического потока показан на рисунке 4. В полученном изображении черные пиксели соответствуют неподвижной части изображения, а белые – движущейся. 4. Рисунок 3. Входные изображения Рисунок 4 - Результат расчета оптического потока Заключение В данной работе были рассмотрены понятие оптического потока и основы метода Лукаса-Канаде для вычисления оптического потока. В качестве примера было рассмотрено вычисление оптического потока в MatLab. Данный алгоритм является достаточно простым и быстрым. Во многих случаях метод Лукаса-Канаде достаточно эффективен. Среди недостатков алгоритма следует отметить, что данный метод эффективен только при небольших смещениях объекта между кадрами. Для решения указанных проблем на практике используется комбинация метода Лукаса – Канаде с другими методами, например, с методом определения угла объекта и методом пирамиды. 5. Список использованных источников 1. Lucas B. and Kanade. T. An iterative image registration technique with an application to stereo vision. Proc. DARPA IU Workshop,с. 121–130. 1981. 2. Barron J. L., Fleet D. J., and Beauchemin S. S. Performance of optical flow techniques. International Journal of Computer Vision, 12(1),с. 43–77. 1994 3. Alireza Bab–Hadiashar, David Suter. Robust Optic Flow Computation. - International Journal of Computer Vision 29(1), с. 59–77. 1998 4. Вишняков Б.В., Визильтер Ю.В., Лагутенков А.В. Использование модифицированного метода оптических потоков в задаче обнаружения и межкадрового прослеживания движущихся объектов. ФГУП ГосНИИ Авиационных Систем, 2004. – 12 с. 5. Шалабанов А.К., Роганов Д.А.Эконометрика [Электронный ресурс]: учебное пособие / Шалабанов А.К., Роганов Д.А.;Университет управления «ТИСБИ». Казань: Издательство ТИСБИ, 2004. – 203с. 6. Вычисление оптического потока методом Лукаса-Канаде. Теория // habrahabr.ru. [2013-1014]. Дата обновления: 18.02.2013. URL: http://habrahabr.ru/post/169055/(дата обращения: 31.03.2014). 7. Lucas-Kanadealgorithm. // Copterix. [2011 – 2014]. URL: http://copterix.perso.rezel.net/?page_id=58 (дата обращения: 31.03.2014). 8. Обобщенный метод наименьших квадратов. //Википедия. [2013-2014]. URL:http://ru.wikipedia.org/wiki/Обобщенный_метод_наименьших_квадратов (дата обращения: 31.03.2014). 9. Оптический поток // Википедия. [2013 – 2014]. Дата обновления: 04.03.2014. URL: http://ru.wikipedia.org/Оптический_поток (дата обращения: 31.03.2014).