Статическая и динамическая поперечная устойчивость
реклама

1
МОСКОВСКИЙ АВТОМОБИЛЬНО-ДОРОЖНЫЙ
ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
(МАДИ)
А.М. ПЕТРЕНКО
УСТОЙЧИВОСТЬ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Учебное пособие
Утверждено
в качестве учебного пособия
редсоветом МАДИ
МОСКВА, МАДИ 2013
2
УДК 629.114
ББК 34.47
П 303
Рецензенты:
зав. кафедрой ГП и ГПА канд. техн. наук, доц. Домогаров А.Ю.;
главный конструктор ФГУП КБ «Мотор» Беляков С.Б.
Петренко, А.М.
П 303. Устойчивость специальных транспортных средств:
учеб. пособие /А.М. Петренко; МАДИ.- М., 2013. – 41 с.
В учебном пособии изложены основы статической и динамической
поперечной устойчивости специальных транспортных средств (СТС)
как одного из эксплуатационных свойств, необходимого при анализе и
оценке качественных и количественных характеристик транспортного
средства в процессе проектирования. Рассмотрены основные
показатели устойчивости СТС, и даются рекомендации по расчету
показателей, влияющих на поперечную устойчивость транспортного
средства, движущегося по дорожным неровностям, пересеченной
местности и косогорам, а также при криволинейном движении.
Учебное пособие предназначено для студентов конструкторскомеханического факультета специальности 190200 «Многоцелевые
гусеничные и колесные машины», а также может быть использовано
для подготовки студентов кафедры транспортных установок и других
родственных специальностей.
УДК 629.114
ББК 34.47
МАДИ,2013
Петренко А.М.
3
Введение
Перевозка многотонных неделимых грузов, имеющих большие
размеры, по дорогам народнохозяйственного значения и местности,
имеет большое значение для страны. К таким грузам относятся котлы
тепловых электростанций, фермы и пролеты мостов, дорожностроительная техника, баллистические ракеты и др. Зачастую такие
грузы нецелесообразно перевозить морским путем или по железной
дороге, поскольку строительные объекты могут находиться в
удаленных местах пустынной и лесной частей страны. Для перевозки
специфических по сложности и массе грузов, требующих сохранения
высокой точности геометрических размеров, после заводской сборки,
прочности самой конструкции и жесткости ее стыков используются
большегрузные специальные самоходные платформы и автопоезда.
Положение таких грузов на транспортном средстве значительно
повышает центр тяжести, что снижает скоростной режим,
безопасность движения на криволинейных участках дорог и характер
движения особенно по неровностям местности и косогорам. Поэтому в
процессе проектирования транспортного средства очень важно иметь
теоретическую предварительную оценку его поперечной устойчивости,
необходимую при транспортировании различных крупногабаритных
неделимых грузов.
1. ОБЩИЕ ПОНЯТИЯ, ОЦЕНОЧНЫЕ ПОКАЗАТЕЛИ
УСТОЙЧИВОСТИ СТС
Устойчивость транспортного средства (ТС) – свойство,
характеризующее способность ТС сохранять параметры положения и
движения после прекращения действия возмущающих сил,
стремящихся изменить эти параметры. Т.е. под устойчивостью
понимают способность СТС преодолевать криволинейные участки
дорог, располагаться на косогорах и двигаться по ним и пересеченной
местности без опрокидывания и бокового скольжения (заноса) всех
движителей или одной из осей, в том числе и при действии силы
ветра.
Для оценки устойчивости СТС (автопоездов) используются
различные показатели, из которых можно выделить следующие:
•предельный (критический) угол продольного крена автопоезда по
опрокидыванию;
•предельный (критический) угол продольного крена автопоезда по
скольжению;
•предельный (критический) угол бокового крена автопоезда по
опрокидыванию;
4
•предельный (критический) угол бокового крена автопоезда по
скольжению;
•предельная
(критическая)
скорость
установившегося
криволинейного движения по опрокидыванию;
•предельная
(критическая)
скорость
установившегося
криволинейного движения по боковому скольжению;
•углы дрейфа автомобиля-тягача (прицепа);
•критическая скорость движения по вилянию прицепа;
•критическая скорость устойчивого прямолинейного движения.
Предельный
угол
продольного
крена
автопоезда
по
опрокидыванию max характеризует устойчивость положения
автопоезда при преодолении крутого подъема или спуска. Прямого
нормирования этого показателя не имеется, однако в технической
литературе формулируется требование существенного превышения
его величины над нормированной величиной максимального
преодолеваемого подъема.
Предельный угол продольного крена автопоезда по скольжению
(буксование ведущих колес max) характеризует устойчивость
движения автопоезда по скорости движения при преодолении крутого
подъема или спуска. Поскольку потеря устойчивости по скольжению
предпочтительнее потери устойчивости по опрокидыванию, можно
сказать, что предельный угол продольного крена автопоезда по
скольжению должен быть меньше, чем по опрокидыванию, т.е. max
max.
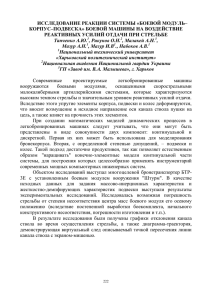
Рис.1. Максимальный угол поперечной статической устойчивости ТС
Предельный угол бокового крена по опрокидыванию max
определяется на стенде-платформе, характеризует устойчивость ТС
при движении по косогору. Показателем поперечной устойчивости по
опрокидыванию является коэффициент поперечной устойчивости
5
численно равный тангенсу предельного угла бокового крена по
опрокидыванию без учета деформации подвески и шин (рис.1)
ПУ = B/2hg = tgmax ,
(1)
где В – колея ТС; hg –высота расположения центра масс.
Официального нормирования этого показателя нет. У современных
грузовых автомобилей ПУ = 0,6…0,9, что соответствует предельному
углу бокового крена по опрокидыванию max = 30…420.
Предельный угол бокового крена по скольжению max
характеризует устойчивость движения по боковой скорости. По
содержанию этот показатель совпадает с показателем проходимости наибольшим углом преодолеваемого косогора, а по величине должен
быть меньше max, т.е. max max.
Предельная
(критическая)
скорость
установившегося
криволинейного
движения
по
опрокидыванию
определяет
устойчивость положения ТС под действием на него поперечной
составляющей силы инерции. Официального нормирования этот
показатель не имеет. Однако правомерно предположить, что
конструкция ТС должна обеспечивать устойчивость от опрокидывания
при любых возможных для него сочетаниях кривизны траектории и
предельной
скорости
движения,
вычисленной
при
полном
использовании тягово-скоростных свойств.
Предельная
(критическая)
скорость
установившегося
криволинейного движения по боковому скольжению (заносу)
устанавливает устойчивость движения по боковой скорости под
действием на ТС поперечной составляющей силы инерции. По ранее
высказанным положениям о взаимоотношениях показателей
устойчивости по опрокидыванию и скольжению здесь также уместно
считать необходимым, чтобы боковое скольжение наступало раньше,
чем ТС опрокинется.
Углом дрейфа называется угол между вектором скорости
движения проекции кинематического центра поворота на продольную
ось и продольной осью ТС. Для двухосного ТС с передней
управляемой осью угол дрейфа равен углу увода середины задней
оси. Угол дрейфа оценивает склонность ТС к заносу, т.е. вероятность
потери курсовой устойчивости.
По техническим требованиям к устойчивости и управляемости
автомобилей в качестве допускаемой величины предлагается
[] = 70 при боковом ускорении JУ = 4 м/с2 и скоростях движения от 40
до 100 км/ч. Это значение угла дрейфа установлено из возможности
ликвидации такого угла дрейфа углом поворота рулевого колеса,
равным или меньшим 1200, если передаточное отношение рулевого
управления не превышает 15.
6
Примечание. Кинематический центр поворота – это мгновенный
центр поворота ТС при установившихся значениях радиуса поворота и
«ползучей» скорости, при которой инерционные силы малы.
Критической скоростью движения по вилянию прицепа является
такая скорость движения на прямолинейном участке дороги, при
достижении которой прицеп или полуприцеп в составе автопоезда
начинает вилять в каждую сторону на более чем допустимую
величину. В качестве допустимой величины виляния принимается 3%
в каждую сторону от габаритной ширины прицепного звена.
Критической скоростью устойчивого прямолинейного движения
автопоезда VКР называется скорость, после достижения которой
автопоезд становится неустойчивым по угловой скорости. Т.е. при
воздействии на автопоезд любого возмущения он войдет в
криволинейное движение с увеличивающейся кривизной, которое
может окончиться заносом или опрокидыванием. В качестве
требования обычно принимается, чтобы критическая скорость была
выше максимальной, т.е. VКР Vmax.
Рассмотренные
показатели
можно
использовать
при
сравнительной оценке устойчивости движения автопоездов, а часть из
них применять как ограничительные по скорости движения факторы.
Устойчивость СТС в значительной степени зависит от
характеристик подвески и шин, которые оказывают влияние на
изменение
положения
центра
масс,
бокового
увода,
перераспределения нагрузок на колеса, причем величина и характер
этого влияния могут быть различными. Изменением параметров
подвески можно воздействовать в желаемом направлении на
величину и характер бокового увода, дополняя тем самым способы
повышения устойчивости ТС.
Влияние подвески на боковой увод связано, главным образом, с
наклоном (креном) подрессоренной массы в поперечной плоскости.
Этот наклон появляется при движении по кривой и неровностям
дороги под воздействием моментов от центробежной силы и
составляющей силы тяжести. Наклон подрессоренной массы
вызывает перераспределение вертикальных реакций на колесах и их
кинематические смещения. Оба эти фактора влияют на боковой увод
ТС и зависят от подвески. Если, например, ТС движется по кривой, то
под действием момента от центробежной силы вертикальные реакции
на наружных колесах увеличатся, а на внутренних уменьшатся. Такое
перераспределение вертикальных реакций снижает устойчивость осей
против бокового увода. С увеличением перераспределения
вертикальных реакций величина углов увода колес возрастает, так как
увеличивается действующая боковая сила. Когда перераспределение
вертикальных реакций достигает такой величины, что внутренние
7
колеса, разгружаясь, начинают проскальзывать, угол увода при
заданной боковой силе начинает значительно возрастать. Таким
образом, чем больше момент от центробежной силы, приходящейся
на колеса одной оси, тем больше боковой увод оси. В одном случае
(например, для передних колес) это увеличивает их угол увода,
улучшая устойчивость ТС. В другом случае увеличивает угол увода
задних колес и ведет к излишнему поворачиванию, т.е.ухудшает
устойчивость
ТС.
Изменяя
конструкцию
подвески,
можно
дополнительно повышать устойчивость ТС как с учетом бокового
увода при движении на поворот, так и при движении по косогору.
Понятие “ось крена” относительное. При расчете поперечной
устойчивости “ось крена” определяется как ось, соединяющая две
воображаемые точки: центры крена передней и задней подвесок ТС.
Центр крена находится как мгновенный центр, относительно которого
осуществляется поворот подрессоренной массы за счет деформации
упругих элементов подвески и шин. Положение центра крена в
основном зависит от конструкции подвески, кинематики ее
направляющего устройства и колес. При расчете статической или
динамической
устойчивости
положение
центров
крена
подрессоренной массы можно считать неизменным для условий
оценки предельного (критического) состояния по устойчивости ТС. В
общем же случае оценки динамической поперечной устойчивости ТС и
поперечных колебаний подрессоренной массы изменение положения
центров крена следует учитывать.
2. СТАТИЧЕСКАЯ ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ
2.1. Определение параметров ТС, влияющих на поперечную
устойчивость
Статическая устойчивость характеризуется отсутствием опрокидывания или скольжения ТС при движении на низшей передаче по
дороге с поперечным уклоном (косогору) или стоянке на дороге или
местности с определенным углом наклона. В общем случае
статическая устойчивость оценивается предельным углом наклона
дороги (косогора), на которой может находиться ТС при воздействии
сил тяжести, ветра и с учетом деформации подвески, шин и грунта.
При учете ветровой нагрузки принимается ее воздействие на боковую
поверхность ТС, стоящего на наклонной поверхности, параллельно
горизонту местности. Силами инерции при расчете статической
устойчивости пренебрегают.
Поперечная устойчивость транспортного средства на косогоре в
основном зависит от перераспределения нагрузок между колесами
правого и левого бортов (рис.1). При движении СТС по косогору
8
возникающая боковая сила (боковая составляющая силы тяжести ТС)
создает момент, вызывающий перераспределение нагрузок между
колесами правого и левого бортов. При этом вследствие упругости
подвески и шин подрессоренная масса ТС (несущая конструкция с
грузом) накренится относительно некоторой оси («оси крена») и
опорной поверхности, что усилит перераспределение нагрузок и при
независимой подвеске отразится, в соответствии с ее кинематической
схемой, на положении самой подрессоренной массы и колес.
2.2. Влияние подвески и ее кинематики на перераспределение
вертикальных реакций на колесах
Существенное влияние на крен подрессоренной части и
положение
колес
оказывает
конструкция
подвески
и
ее
кинематическая схема. Для подвески с определенной угловой
жесткостью крен подрессоренной массы обуславливается величиной
действующего момента, создаваемого боковой силой (центробежная
сила, составляющая силы тяжести несущей конструкции, боковой
сильный ветер и др.) и плечом поперечной (боковой) силы расстоянием от центра тяжести подрессоренной массы до
мгновенного центра ее поворота. Величина плеча боковой силы
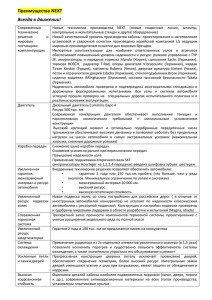
зависит от кинематической схемы подвески. На рис.2 показано
положение мгновенного центра поворота подрессоренной массы
(центра крена) ТС с различной кинематикой конструкции подвесок и
схема его определения. В статическом состоянии положение центра
крена обозначено через О, а центра тяжести-через С.
Рис. 2. Положение центра крена в зависимости от конструкции
и кинематики направляющего устройства подвески:
а – зависимая подвеска; б – независимая однорычажная подвеска; в –
независимая двухрычажная подвеска; г – определение положения центра
крена при независимой двухрычажной подвеске; д – положение оси крена при
9
различном положении рычагов направляющего устройства независимой
подвески
Ориентировочно положение центра крена подрессоренной массы
при статическом состоянии ТС принимается следующим. Для всех
колесных ТС центр крена подрессоренных масс, обусловленного
упругой деформацией шин, при заблокированной подвеске, лежит на
оси, соединяющей противоположные колеса по бортам ТС. При
зависимой подвеске колес (неразрезная ось – рис. 2,а) центр крена
подрессоренных масс лежит примерно в плоскости верхних опорных
площадок рессор (пружин). Мгновенный центр крена для подвески,
колеса которой независимо подвешены на одном рычаге (рис. 2,б),
находится на пересечении линий, соединяющих точки контакта колес с
дорогой, с шарнирами рычагов. При сокращении длины рычагов
подвески можно поднять центр крена и уменьшить плечо крена.
Однако уменьшение плеча крена связано с увеличением наклона
колес при деформации упругих элементов подвески и заметным
изменением колеи. При независимой подвеске на двух параллельных
горизонтальных рычагах (рис.2,в) мгновенный центр крена
подрессоренных масс будет лежать в точке пересечения линии,
проходящей параллельно рычагам в плоскости опоры колес с
вертикальной плоскостью симметрии ТС.
Плечо
h,
определяемое
расстоянием
центра
тяжести
подрессоренных масс ТС от плоскости опоры колес, будет
сравнительно велико, и поэтому крен несущей конструкции окажется
большим. Сохраняя ту же кинематическую схему подвески на двух
рычагах, можно соответствующим взаимным их наклоном (рис.2,г) и
относительным наклоном к подрессоренной массе значительно
изменить положение центра крена (рис. 2,д), снижая плечо крена в
одном случае или увеличивая его в другом. При определенном
наклоне рычагов центр крена может оказаться ниже плоскости опоры
колес, т.е. очень большим.
В случае независимой подвески на продольных рычагах и при
свечной вертикальной подвеске центр крена находится в плоскости
опоры колес, однако при свечных подвесках с наклонными
направляющими центр крена может перемещаться соответственно
вверх или вниз. Таким образом, кинематическая схема подвески
определяет положение центра тяжести и положение оси крена,
оказывающих основное влияние на поперечную устойчивость ТС.
Следует отметить, что для оценки поперечной устойчивости ТС в
общем случае важно знать не только плечо приложения боковой силы
в статическом состоянии, но и изменение этого плеча во время крена
подрессоренной массы. При наклоне подрессоренной массы ее
10
мгновенный центр крена может перемещаться в поперечной
плоскости в соответствии с кинематикой подвески и по вертикали, и по
горизонтали. В зависимости от направления и величины
вертикального перемещения центра крена плечо боковой силы будет
уменьшаться или возрастать. Горизонтальное перемещение центра
крена выведет его из вертикальной продольной плоскости,
проходящей через центр тяжести ТС. Вследствие этого сила тяжести
подрессоренной массы создаст момент относительно ее мгновенного
центра крена, который в зависимости от своего направления будет
увеличивать или уменьшать момент от боковой силы. Определив для
положения подрессоренной массы при действии боковой силы
мгновенный центр крена, можно найти величину действующего
момента, который изменится из-за горизонтального смещения точек С
и О. В этом случае сила тяжести подрессоренной массы ТС на
образованном
плече
создает
дополнительный
момент,
увеличивающий момент боковой силы на плече h. Таким образом,
кинематическая схема подвески влияет не только на первоначальную
величину момента, наклоняющего подрессоренную массу, но и на
изменение этого момента во время крена. Желательно иметь
подвески, обеспечивающие прогрессивное уменьшение действующего
момента по мере увеличения угла крена подрессоренной массы,
вызываемого возрастающей боковой силой.
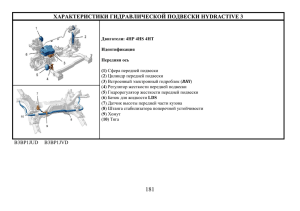
Рис. 3. Положение оси крена несущей конструкции ТС:
а-одинаковая конструкция подвески колес; б-различная конструкция подвески
колес; hС – плечо крена; hg высота расположения центра тяжести; Ga - сила
тяжести несущей конструкции; RZ1, RZ2 - опорные реакции на колесах
Чтобы получить полное представление о боковой (поперечной)
устойчивости, следует, помимо отдельной части ТС над осью колес,
рассматривать крен всего ТС в целом. Крен подрессоренной массы
11
одного несущего звена ТС происходит относительно оси, проходящей
через мгновенные центры крена передней и задней подвесок ТС, или
подвеску колес и опорно-сцепное устройство. Расстояние между
центром тяжести ТС и этой осью определит величину момента,
наклоняющего подрессоренную массу в поперечном направлении.
Плечо hС момента от центробежной силы РУ или поперечной
составляющей силы тяжести ТС равно перпендикуляру, опущенному
из центра тяжести подрессоренной части на мгновенную ось крена
несущей конструкции ТС при ее наклонах в поперечной плоскости
МС =РУhС.
Для того чтобы найти hС, необходимо сначала определить положение
оси поперечных колебаний, вокруг которой поворачивается
подрессоренная масса ТС при ее боковых наклонах. Для вычисления
положения этой оси достаточно найти координаты двух ее точек –
полюсов крена передней и задней частей ТС, определяемых
конструкцией подвески и расположением колес ходовой части, а в
случае полуприцепного варианта ТС – опорно-сцепным устройством.
ТС можно считать симметричным относительно продольной
плоскости, проходящей через его центр тяжести перпендикулярно к
оси колес, а жесткости упругих элементов и шин — попарно равными.
В этом случае поперечные колебания будут происходить вокруг оси,
лежащей в плоскости симметрии ТС. При этом принимаем, что центр
тяжести подрессоренных масс по базе находится в одной
вертикальной плоскости с центром тяжести всего ТС.
За ось крена принимают прямую, соединяющую мгновенные
центры (центры крена) для передней и задней частей ТС. На рис.3,а и
б представлено положение оси крена при различной конструкции
подвески передних и задних колес.
В зависимости от конструкции и относительных размеров
подвески центр крена О может лежать у оси колес, выше оси колес
или ниже оси колес в плоскости дороги. В независимых рычажных
подвесках положение центра крена О зависит от наклона рычагов. В
параллелограммном направляющем устройстве подвески центр крена
при наклонных рычагах значительно изменяется относительно уровня
дороги. При такой подвеске продольные колебания ТС будут
сопровождаться изменением колеи колес, развал их будет оставаться
неизменным, а при увеличении угла наклона рычагов центр крена
будет повышаться. В подвеске с трапециевидным направляющим
устройством центр крена располагается несколько выше уровня
дороги, а изменения колеи и развала колес при продольных
колебаниях кузова остаются небольшими. В зависимости от типа,
конструкции и размеров направляющего устройства подвески,
12
величина опрокидывающих моментов от центробежной силы и
составляющей силы тяжести может быть весьма различной.
Распределение моментов по осям зависит от угловой жесткости
подвески. Угловой жесткостью подвески называется ее способность
противостоять моментам, стремящимся повернуть подрессоренную
массу вокруг оси ее крена. Величина угловой жесткости подвески
определяется
из
отношения
момента,
действующего
на
подрессоренную массу, к углу ее наклона. Чем жестче подвеска, тем
большая доля момента приходится на нее. Суммарную угловую
жесткость подвесок передних и задних колес выбирают исходя из
частоты собственных колебаний подрессоренной массы ТС в
поперечной плоскости. Если пренебречь моментами инерции осей и
колес и жесткостью рамы несущей конструкции ТС, то уравнение
собственных колебаний ТС будет определяться следующей
зависимостью:
JХd2/dt2 + 2(CУ1 + CУ2) = 0 ,
(2)
где JХ — момент инерции подрессоренной части ТС относительно
продольной оси, проходящей через центр тяжести; СУ1 и СУ2 —угловые
жесткости подвесок передних и задних колес соответственно.
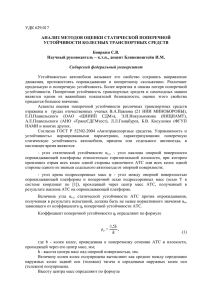
2.3. Определение угловой жесткости подвески
Величина угловой жесткости подвески определяется отношением
момента, действующего на подрессоренную массу ТС, к углу наклона
подрессоренной массы под действием этого момента. Жесткость для
независимой подвески определяется ее конструкцией. В частности,
угловую жесткость независимой подвески с трапециевидным типом
направляющего устройства можно определить по следующему
уравнению (рис. 4):
Су = 2Ср[aHsin( + /2) - cbHsin( + /2)/d](lH + cf/d),
(3)
где Cp — вертикальная жесткость упругого элемента; aH,bH,c,d,f, ℓH,,
— размеры элементов направляющего устройства подвески.
13
Рис. 4. Кинематическая схема независимой подвески
Упрощенная схема подвески колес (рис.5) позволяет формулы
для вычисления угловой жесткости подвески представить в
следующем виде:
СУ1 = [Ср1Сш1d201d21/(Cp1d201.+ Cш1d2k1)] + CC1,
(4)
для зависимой подвески
CУ2 = [Cp2Cш2d2p2d22/(Cp2d2p2 + Cш2d22)] + CC2,
(5)
где СР, СШ, СС – соответственно жесткости упругих элементов
подвески, шин и стабилизаторов поперечной устойчивости (при их
наличии). Если пренебречь упругостью шин, то при отсутствии
стабилизаторов угловая жесткость подвесок будет равна:
CУ1 = Cp1d201d21/d2k1;
CУ2 = Cp2d22.
(6)
Собственная
частота
поперечных
угловых
колебаний
подрессоренной массы будет равна
У == 9,552(CУ1 + CУ2)/JХ, [кол/мин]
(7)
Рекомендуется выбирать суммарную угловую жесткость подвесок
такой, чтобы частота У незначительно отличалась от собственных
частот вертикальных колебаний подрессоренной массы.
14
Рис. 5. Упрощенная схема ТС для анализа поперечных
колебаний: а - независимая подвеска; б - зависимая подвеска
2.4. Определение положения центра масс (центра тяжести)
А. Определение положения центра масс в горизонтальной
плоскости проводится расчетным путем, основанным либо на
результатах взвешивания ТС, либо на расчете нагрузок,
приходящихся на колеса полностью укомплектованного ТС с грузом,
по следующим формулам (рис.6):
Xцт = Qixi/Q, Уцт = Qл(пр)В/Q,
(8)
где Хцт - координата центра масс ТС по длине, [м]; Уцт - координата
центра масс в поперечном направлении, [м]; хi- координата i-й оси, [м];
Qi - нагрузка, приходящаяся на i-ю ось, [кН]; В - колея ТС, [м];
Q = Qi- полная сила тяжести ТС, [кН]; Qл, Qпр - нагрузка,
приходящаяся на левый и правый борт соответственно, [кН].
Б. Определение положения центра масс по высоте проводится на
основании результатов испытаний ТС на поперечную устойчивость на
специальном стенде, при взвешивании, или расчетным путем.
Специальный стенд опрокидывания для определения статической
устойчивости представляет собой платформу, которая может
15
поворачиваться (наклоняться) относительно оси симметрии или одной
из ее сторон.
Рис.6. Схема определения центра масс по базе ТС
Угол бокового наклона платформы, при котором начинается
отрыв одного или нескольких колес одного борта ТС от платформы
(положение неустойчивого – «безразличного» равновесия), будет
максимальным углом статической устойчивости max (без учета
ветровой нагрузки). При этом направление силы тяжести ТС будет
проходить через точку опоры колес одного борта (колеса
противоположного борта будут разгружены).
Определение центра масс ТС по высоте при испытании на стенде
поперечной устойчивости проводится при заблокированной подвеске
колес и давлении в шинах, достигшем максимально допустимого
значения.
Центр масс по высоте определяется по формуле
hg = B/2tgmax, [м]
(9)
где max – максимальная величина угла наклона, при котором
начинается отрыв колес одного борта; В – колея транспортного
средства, [м].
Центр масс по высоте при взвешивании ТС определяется по
изменению нагрузок при подъеме колес одного из бортов ТС. В этом
случае при заблокированной подвеске принимается линейный закон
изменения нормальных реакций на колесах каждого борта от угла
наклона (высоты подъема) опорной поверхности под колесами одного
борта. Следовательно, поднимая колеса одной из сторон ТС
относительно другой с одновременным измерением нагрузки на
колесах, можно по двум-трем точкам подъема построить зависимость
Qi = f(i). Зная, что наибольший угол поперечной устойчивости ТС max
будет соответствовать распределению его полной массы на колеса
одного борта Qi, пропорция изменения нагрузки в зависимости от
угла i будет иметь вид
tgmax = Qi tgi/Qi,
(10)
16
где Qi – полная нагрузка, распределенная по осям; Qi - нагрузка на
колеса одного борта, соответствующая подъему противоположного
борта на угол i.
Используя зависимости (13) и (14), формула для определения
высоты расположения центра масс от опорной поверхности будет
иметь вид
hg = 0,5BQi/Qitgi [м]
(11)
2.5. Определение поперечной устойчивости ТС на косогоре
2.5.1. Наибольший угол поперечной устойчивости ТС
При заблокированных подвеске и шинах ТС изменение угла его
поперечного наклона, равного углу наклона опорной поверхности ,
будет пропорционально изменению величины опорных реакций на
движителях (см. рис.1). При этом опрокидывающий момент,
создаваемый поперечной составляющей силы тяжести mgsin, будет
равен
Моп = hgmgsin,
(12)
где hg – расстояние центра тяжести ТС от опорной поверхности;
m – масса ТС; g – ускорение силы тяжести.
Сопротивление опрокидыванию ТС создается восстанавливающим моментом, создаваемым нормальной составляющей силы
тяжести mgcos и частью колеи, определяемой расстоянием от точки
опоры движителя до вертикальной плоскости, проходящей через
центр масс и перпендикулярной опорной поверхностиТС. Для
рассматриваемой схемы ТС с заблокированными упругими
элементами восстанавливающий момент Мв равен
Мв = 0,5Bmgcos,
(13)
где В – колея ТС.
Положение
неустойчивого
(«безразличного»)
равновесия
определяется равенством опрокидывающего и восстанавливающего
моментов Моп = Мв. Следовательно, решением равенства
зависимостей (12) и (13) получим наибольший поперечный угол
статической устойчивости ТС
tgmax = 0,5B/hg
(14)
Этот угол для ТС будет максимальным, наличие упругих
элементов в опорной системе (подвеска и шины), а также силы ветра,
снижают величину угла устойчивости. Максимальный угол поперечной
статической устойчивости для СТС находится в пределах 32…45
градусов.
2.5.2. Влияние на поперечную устойчивость ТС упругих
устройств подвески и шин
17
Влияние упругих устройств подвески и деформации шин на угол
поперечной статической устойчивости можно ориентировочно оценить
по анализу схемы на рис.7 при допущении об отсутствии ветровой
нагрузки и смещения мгновенного центра крена при наклоне
подрессоренной массы, а также положения центра масс
подрессоренной части и всего ТС в одной точке. Рассмотрим схему
крена ТС, стоящего на косогоре с углом , при деформации упругих
элементов в подвеске и радиальной деформации шин. При расчетах
принимаем допущение, что поперечная составляющая силы тяжести
при наклоне подрессоренной массы за счет деформации упругих
элементов не изменяет своего направления при смещении центра
масс в сторону наклона ТС. Опрокидывающий момент имеет
величину, определяемую формулой (13), а восстанавливающий
момент уменьшается за счет изменения его плеча на величину,
обусловленную смещением центра масс при крене подрессоренной
массы относительно центра крена. Т.е. восстанавливающий момент
при деформации упругих элементов подвески будет равен:
Мв = mgcos(0,5B - Bp),
(15)
а при деформации шин
Мв = mgcos(0,5B – Bш),
(16)
где Bp и Bш – величины смещения центра масс и вертикальной
составляющей силы тяжести при наклоне подрессоренной массы
относительно оси крена при деформации упругих элементов
соответственно подвески и шин.
Крен подрессоренной массы ТС можно рассматривать отдельно
для каждого из случаев анализа влияния упругой деформации
подвески или шин, так как наклон подрессоренной массы на упругих
элементах подвески и шинах происходит относительно различных
центров крена. Таким образом, величину предельного угла
статической поперечной устойчивости при учете деформации упругих
элементов подвески и шин можно представить как разность между
максимальным углом поперечной устойчивости и углами крена ТС,
вызванными раздельно деформацией упругих элементов подвески и
эластичностью шин. Угол опрокидыванияТС, стоящего на косогоре с
углом , при радиальной деформации подвески определяется из
условия, что центр крена подрессоренной массы находится на
плоскости, проходящей через верхние опоры упругих элементов, а при
радиальной деформации шин ось крена подрессоренной массы
находится на уровне осей колес.
Для общего случая расчета поперечной устойчивости ТС при
наличии упругих элементов (подвески или шин) можно рассмотреть
схему на рис.7.
18
У ТС, стоящего на косогоре с углом , при деформации упругих
элементов подвески или шин подрессоренная масса повернется на
угол У.относительно оси крена. Следовательно, при неизменном
опрокидывающем моменте восстанавливающий момент будет иметь
следующий вид:
Мв = mgcos(0,5BУ - BУ)
(17)
ВУ = hКtgУ,
(18)
где ВУ – величина смещения центра масс; hК – плечо поворота
подрессоренной массы относительно оси крена; ВУ – расстояние
между упругими элементами (рессорная база в случае подвески или
колея в случае упругих шин).
tgУ определяется из геометрического подобия треугольников с
углами при вершине У:
tgУ = УР/0,5BУ,
(19)
где УР – деформация упругих элементов одного борта.
Рис.7. Схема поперечного наклона ТС при наличии упругих
устройств
Деформацию упругих элементов одного борта УР можно
определить из равенства двух моментов:
а) момента относительно оси крена от поперечной составляющей
силы тяжести M1 = mпghКsin;
б) момента, возникающего при дополнительной деформации
упругих элементов, вызванной поперечным наклоном подрессоренной
массы mп M2 = УРCУРBУ,
где СУР – суммарная вертикальная (радиальная) жесткость упругих
элементов одного борта.
19
Из равенства М1 = М2 получим
УР = gmпhКsin/CУРBУР.
(20)
Решая совместно (12), (17), (18), (19) и (20) при Моп = Мв, получим
формулу
для
определения
предельного
угла
статической
устойчивости ТС с учетом деформации упругих элементов
tgП.max = 0,5B/hg – hК2mпgsin/0,5hgCУРBУР2.
(21)
Таким образом, при деформации упругих элементов подвески
формула для определения поперечной устойчивости при деформации
упругих элементов подвески будет иметь вид
tgРmax = 0,5B/hg – mпg hp2sin/( 0,5hgCpBp2),
(22)
а при упругой деформации шин
tgШ.max = 0,5B/hg - mпghш2sin/hgCш0,5В2,
(23)
где hp-плечо крена подрессоренной массы при деформации подвески;
Cp – радиальная жесткость упругих элементов подвески; Bp рессорная база; hш – плечо крена подрессоренной массы при
деформации шин; Cш – радиальная жесткость шин; В – колея.
Таким образом, наибольший угол статической устойчивости ТС с
учетом деформации упругих элементов подвески и шин будет равен
tg1max = 0,5B/hg – mпgsin[(hp2/0,5CpBp2) - (hш2/0,5СшВ2)]/hg. (24)
Уравнения (22), (23) и (24) решаются методом последовательного
приближения: последовательной подстановкой принятых для расчета
величин угла от минимального до max.
Влияние тангенциальной эластичности шин определяется при
боковой деформации шин ТС, стоящего на косогоре с углом ,
уменьшающей плечо восстанавливающего момента на величину
= mgsin/CШ,
где CШ - тангенциальная жесткость шин.
Предельный
угол
по
опрокидыванию,
учитывающий
тангенциальную упругую деформацию шин, будет равен
tgШmax = (0,5B - mgsin/ CШ)/hg.
(25)
При возможности скольжения ТС максимальный угол поперечной
статической устойчивости находится из условия равенства
поперечной составляющей силы тяжести и суммарной поперечной
реакции колес максимальной по сцеплению: mgsin = Ymgcos,
откуда
tgY = Y,
(26)
где Y – коэффициент сцепления колес в поперечном направлении.
3. ВЛИЯНИЕ КОНСТРУКТИВНОЙ СХЕМЫ СТС
НА ПОПЕРЕЧНУЮ УСТОЙЧИВОСТЬ
3.1.Конструктивные опорные схемы ТС
20
По способу опирания несущей конструкции ТС и движителей на
опорную поверхность транспортные средства подразделяются на
четырехопорные и трехопорные. В четырехопорных ТС (автомобилях,
тракторах, тягачах, многоосных самоходных ТС и т.п.) соединение
несущей конструкции (несущей рамы) с движителями приводится к
четырем опорным точкам (к двум осям – передней и задней). В
трехопорных ТС (полуприцеп или прицеп) соединение несущей рамы
приводится к двум точкам опоры задней оси и к одной точке опоры на
седельном устройстве тягача или горизонтальном продольном
шкворне переднего хода прицепа.
При поперечном крене подрессоренной массы ТС ее наклон
осуществляется относительно продольной оси крена. Положение оси
крена ТС зависит от конструкции направляющего устройства
подвески. У четырехопорных конструкций положение оси крена
определяется мгновенными полюсами, расположение которых зависит
от конструкции подвески и упругих элементов передней и задней опор
(см. рис.4). Для трехопорных конструкций ТС осью крена является
прямая, проходящая через точку опоры на седельном или шкворневом
устройстве, и мгновенный полюс крена второй опоры, положение
которого определяется конструкцией подвески. При наличии упоров в
сцепном устройстве, ограничивающих поперечный наклон несущей
рамы трехопорного ТС, при расчете устойчивости следует
рассматривать поперечный наклон подрессоренной части сначала для
трехопорной конструкции, а затем – для четырехопорной, но со
смещенным в поперечной плоскости положением центра тяжести
подрессоренной массы.
В зависимости от конструкции опорно-сцепного устройства и
характера опирания несущей рамы на колесный ход при тяговой связи
все СТС можно привести к четырехопорным и трехопорным
кинематическим схемам. В четырехопорных СТС соединение несущей
рамы с колесными ходами осуществляется в четырех точках (схема
ТС приводится к четырем точкам опоры на дорогу): двух точках
переднего и двух точках заднего ходов. В трехопорных СТС
(полуприцеп или прицеп, шарнирно сочлененный с передней
подкатной тележкой) соединение несущей рамы приводится к двум
точкам опоры заднего колесного хода с дорогой и к одной точке опоры
на седельном устройстве тягача или на продольном шкворне
подкатного переднего колесного хода.
При оценке поперечной устойчивости расчетным путем
принимаются следующие допущения: подрессоренная часть (несущая
конструкция ТС) считается абсолютно жесткой; характеристика
подвески (зависимость нагрузки от деформации) принимается
линейной;
упоры,
ограничители
положения
направляющего
21
устройства подвески, отсутствуют; ось крена подрессоренной массы
остается неизменной; величина колеи ТС на косогоре остается
постоянной, боковое скольжение исключается; ветровая нагрузка не
учитывается. В ряде случаев для большегрузных ТС, учитывая
незначительную величину неподрессоренных масс по сравнению с
полной массой ТС, положение центра масс (подрессоренной и всего
ТС) принимается единым.
3.2. Четырехопорная схема
У четырехопорных ТС ось опрокидывания проходит через точки
контакта колес одного борта с опорной поверхностью (положение
опоры колес принято считать на одной горизонтальной плоскости).
Осью крена подрессоренной массы является прямая, соединяющая
центры крена переднего и заднего ходов ТС (рис.8).
Рис.8. Четырехопорная схема транспортного средства
Уравнение равновесия ТС на границе устойчивости определяется
равенством опрокидывающего МО и восстанавливающего МВ
моментов (рис.9).
МО = Gahgsin;
МВ = 0,5BGacos - GПcoshKsinK,
где Ga и GП – полная сила тяжести ТС и сила тяжести подрессоренной
части соответственно; В – колея ТС; hg – высота положения центра
тяжести ТС от опорной поверхности; hK – расстояние центра тяжести
подрессоренной части от оси крена (плечо крена); K – угол крена
подрессоренной части.
Учитывая небольшую величину угла К, можно принять, sinK = К,
следовательно, при МО = МВ угол поперечной устойчивости будет
равен
tgCT = (0,5Bma - mПhKК)/mahg
(27)
22
или
где ma, mП
масса.
CT = arctg[(0,5Bma - mПhKК)/mahg],
(28)
–соответственно полная масса ТС и подрессоренная
Рис.9. Схема положения на косогоре с углом четырехопорного ТС
Уравнение равновесия подрессоренной части
деформации подвески будет
CYK – mПcos.hKK = mПhKsin
где CY – угловая жесткость подвески.
K = mПhKsin/(CY – hKmПcos)
с
учетом
(29)
Рис.10. График определения статической устойчивости ТС
По уравнениям (28) и (29) строятся графики (см. рис. 10)
зависимостей = f(K) и K = f(). Координаты пересечения кривых
определяют величину СТ и K.
23
Аналитически угол статической устойчивости СТ можно
определить при подстановке в уравнение (27) выражения (29).
Полученное уравнение, решенное относительно tgCT, определяется
методом последовательного приближения.
3.3. Трехопорная схема
Рассмотрим схему трехопорной конструкции полуприцепа
(рис.11), и определим угол поперечной статической устойчивости без
учета и с учетом деформации упругих элементов подвески колес.
Рис.11. Схема трехопорной конструкции СТС:
Линия опрокидывания проходит через шарнир седельного
устройства и точку на опорной поверхности колес со стороны уклона
дороги (косогора) на расстоянии базы L (см. рис.11) ТС. Осью крена
подрессоренной массы является прямая, соединяющая шарнир
опорно-сцепного устройства и центр крена заднего колесного хода.
При угле наклона косогора и исключении ветровой нагрузки на
ТС опрокидывание в боковом направлении будет определяться
моментом от поперечной составляющей силы тяжести. Угол
поперечной устойчивости определяется для полуприцепа и прицепа
соответственно без учета влияния тягача и подкатной тележки.
Для
трехопорной
конструкции
восстанавливающий
и
опрокидывающий моменты будут равны (рис.11 и 12)
МВ = 0,5Bamacos/L - hKsinK mПcos
MO = masin(hg – hOb/L),
где а – расстояние от центра тяжести ТС до опорно-сцепного
устройства; b – расстояние от центра тяжести ТС до заднего
колесного хода; L – база ТС.
24
Приравняв моменты МВ = МО и проведя некоторые
преобразования, получим
tgCT = (0,5Ba/L)/(hg – hOb/L) - mПhK K/ma(hg – hOb/L)
(30)
CT = arctg[(0,5Ba/L)/(hg – hOb/L) – (mПhK K)/ma(hg – hOb/L)]. (31)
При отсутствии деформации подвески и шин уравнение (31) будет
иметь вид
CT = arctg[(0,5Ba/L)/(hg – hOb/L)]
(32)
Рис.12. Схема положения на косогоре трехопорного ТС
Уравнение равновесия подрессоренной массы аналогично
уравнению равновесия ТС с четырехопорной схемой, т.е. К будет
выражаться уравнением (29).
Графически угол CT будет определяться построением кривых
= f(K) и K = f().
Аналитически угол CT определяется при подстановке в уравнение
(30) выражения для К (29). Полученное уравнение решается методом
последовательного приближения.
3.4. Влияние деформации грунта
Оценка
поперечной
статической
устойчивости
ТС
в
рассмотренных ранее случаях проводилась на жестком основании без
учета деформации грунта. Полагая среднее статическое давление
колеса на грунт в горизонтальном положении ТС qСР при нагрузке на
колесо GСТ, площадь пятна контакта F = GCT/qCР.
Дополнительная нагрузка на колесо при поперечном крене ТС на
угол будет
G = 0,5BCY.
(33)
25
Принимая,
что
дополнительное
давление
на
грунт
пропорционально увеличению нагрузки q = G/F, с учетом (33)
получим
q = GqCР/GCT = 0,5BCYqCР/ GCT.
(34)
В случае деформации грунта S под колесом пропорциональной
изменению давления,
S = SCTq/qCT = 0,5BCYSCT/ GCT,
где SCT – статическая деформация грунта под колесом (осадка колеса)
при q = qCT.
Зная (из таблиц) величину деформации грунта S0 под
воздействием стандартного штампа площадью F0 = 5000 см3,
статическую осадку колеса можно вычислить по следующей формуле:
SCT = S0F/F0,
(35)
где F – площадь отпечатка шины.
С учетом зависимостей (34) и (35) величина дополнительной
осадки колеса на деформируемом грунте буде равна
S = 0,5BCYS0F/GCTF0 = 0,5BCYS0/GCTF0qCT.
(36)
Следовательно, дополнительный угол поворота ТС в поперечной
плоскости за счет деформации грунта при условии равенства нагрузок
на колесах (qCT = qCP) определится зависимостью
= 2S/В = CПРS0/GCTF0qCT,
(37)
где CПР – приведенный коэффициент жесткости подвески колес.
4. ДИНАМИЧЕСКАЯ ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ СТС
4.1. Поперечная устойчивость СТС при прямолинейном
движении по неровностям
А. Определение максимального угла поперечной раскачки ТС
Жесткость упругой характеристики подвески ТС является одним
из основных параметров передаточной функции колесо-несущая
конструкция. При этом упругое устройство подвески при движении ТС
по неровностям (например, переезд единичной неровности колесами
одного борта) вызывает колебания ТС как в вертикальной продольной
плоскости, так и в вертикальной поперечной. Экспериментально
установлена независимость вертикальных и поперечных колебаний,
что позволяет каждый из этих видов колебаний рассматривать
отдельно одно от другого.
В общем случае движения ТС при поперечных и вертикальных
колебаниях, а также при криволинейном движении возникают инерционные силы, которые могут при определенных обстоятельствах суммироваться с действующими внешними силами и влиять на увеличение опрокидывающего момента. При этом суммарная величина этих
сил может превзойти восстанавливающий момент и вызвать опроки-
26
дывание ТС даже на прямолинейном участке дороги с групповыми
неровностями, образованными частыми проездами машин по
деформируемому грунту. Такая возможная потеря поперечной
устойчивости ТС обусловлена совпадением частот собственных
угловых колебаний ТС и частотой внешних возмущений, вызванных
препятствиями дороги, расположенными в определенном порядке.
Сопротивление поперечному опрокидыванию ТС при переезде
единичных или групповых неровностей обуславливает динамическую
устойчивость ТС.
От воздействия неровностей при движении ТС подрессоренная
масса получает возмущение, вызывающее периодическое колебание
этих масс с углом отклонения . При движении по косогору с уклоном
угол наклона подрессоренной массы к горизонту определится
суммой углов наклона подрессоренной массы
П = + К + Ш,
где К и Ш – соответственно углы наклона к горизонту
подрессоренной массы за счет деформации подвески и шин.
Рис.13. Схема движения ТС через дорожные неровности
Схема колебаний ТС при переезде неровности представлена на
рис.13. Для простоты рассматривается ТС с зависимой подвеской
колес. При этом приняты следующие допущения: возмущения на ТС
передаются только через ось колеса; колебания подрессоренной
массы происходят вокруг оси крена, определяемой конструкцией и
кинематикой подвески;
подвеска
не
имеет ограничителей;
вертикальные колебания не влияют на угловые поперечные
колебания.
27
При переезде неровности на ТС будут действовать: возмущающий
момент М от неровности; момент сопротивления упругих элементов
МП при отклонении подрессоренных масс на угол ; момент,
создаваемый демпфирующими элементами в подвеске Ма; момент,
создаваемый силой тяжести МG при наклоне на угол ; инерционный
момент J, где Jу – момент инерции подрессоренной массы
относительно оси крена.
Уравнение равновесия ТС под действием моментов будет
определяться уравнением
Jуd2/dt2 + Ма + МП - МG - М = 0
(38)
M = CPpBP;
MG = GПhKcosП;
MП = 0,5CPBP2n;
Ma = 0,5d2,
где СР – вертикальная жесткость упругих элементов подвески; ВР –
рессорная база; n – число осей ТС; GП – сила веса подрессоренной
массы; hK – плечо крена; - коэффициент сопротивления
демпфирующих элементов; d – расстояние между демпфирующими
элементами; p – деформация упругих элементов подвески одного
борта ТС
p = 0,5ВРНsint,
где Н – угол между высотой неровности и поверхностью косогора на
расстоянии колеи; - частота возмущения.
М = 0,5СРВР2sint.
Учитывая, что MG и МП являются функцией от , и подставляя
выражения моментов в уравнение (38), получим дифференциальное
уравнение вынужденных колебаний
d2/dt2 + 2Кd/dt + У2 = qsint,
(39)
2
2
2
где 2K = 0,5d Jу; q = 0,5CPBPН/Jу; У = (0,5СРВР n - GПhK cosП)/Jу;
У - собственная частота поперечных колебаний ТС.
Решение уравнения (39) позволяет получить выражение для
определения угла поперечной раскачки подрессоренных масс ТС
=Нsin(t-)/[n-GПhKcosП/0,5CPBP2]{[(1-2/У2)2 -22/У2]}, (40)
где = 2K/У.
При резонансе = У и = 0,5 угол поперечных колебаний
подрессоренной массы будет максимальным
max = Н/(n - GПhKcosП/0,5CPBP2).
(41)
Определение динамической устойчивости ТС проводят на участке
дороги с препятствиями, расположенными так, чтобы при переезде
этих
неровностей
создавалось
возмущение,
близкое
к
синусоидальному с длиной волны, равной базе между колесами
28
одного борта. С этой целью неровности для колес каждого борта
сдвигают относительно друг друга на 1800, т.е. на величину (рис.14).
Б. Определение критической скорости поперечного
опрокидывания ТС
При движении ТС по неровностям с определенной скоростью возникают резонансные поперечные колебания подрессоренной массы и
может произойти опрокидывание ТС.
Частота собственных угловых (поперечных) колебаний подрессоренной массы равна
У = Су/Jу,
(42)
где Су – приведенная угловая жесткость упругих элементов одного
борта; Jу – полярный момент инерции подрессоренных масс
относительно продольной оси, величина которого может быть
подсчитана по формуле
Jy = mп(B02 + H02)/12,
(43)
где В0 и Н0 – соответственно габаритная ширина и высота
подрессоренной части ТС.
Частота вынужденных возмущений дорожных неровностей
= 2V/S,
(44)
где V –скорость движения транспортного средства; S – длина волны
дорожных неровностей, принимается для одноосного полуприцепа
равной S = 2DK, где DK – статический диаметр колеса.
Рис.14. Схема расположения неровностей при определении
критической скорости опрокидывания
Для исключения возможного опрокидывания ТС высота
неровностей не должна превышать 0,15DK. Для двух –, трех -,
четырехосных полуприцепов величина длины волны дорожных
неровностей выбирается не менее удвоенной базы между двумя
осями колес.
Приравнивая выражения (42) и (44), т.е. У = , получим формулу
для определения критической резонансной скорости движения ТС,
при которой может произойти опрокидывание его в поперечной
плоскости
Vкр=(SCY/JY)/2. [м/с]
(45)
29
СУ - определяется по одной из формул (3), (4), (5), (6) в зависимости от
конструкции подвески и принятой схемы; JY – определяется по
формуле (43).
Правомерность представленных расчетов доказывает анализ
дорожных неровностей на дорогах с различным покрытием, который
показывает, что их профиль близок по форме к синусоиде со
сглаженными и вытянутыми краями. На грунтовых дорогах
наблюдаются единичные и чередующиеся волнообразные неровности
высотой 100…200 мм переменной длины. Такой профиль может быть
выражен уравнением
q = 0,5Hsin(2x/s),
где q – текущая ордината профиля дороги; Н – высота неровности;
х – текущая абсцисса пути; s – длина волны неровности.
Периодический характер неровностей создает возможность
появления резонанса при соответствующих скоростях движения
многоосных ТС.
4.2. Предельная (критическая) скорость установившегося
криволинейного движения
Предельная
(критическая)
скорость
установившегося
криволинейного движения автопоезда может быть ограничена по
опрокидыванию и по сцеплению (заносу).
На рис.15 показана простейшая схема для определения
предельной скорости установившегося криволинейного движения
автопоезда по опрокидыванию без учета деформации подвески и шин.
Момент опрокидывания создается поперечной составляющей
центробежной силы:
МОП = (maV2hg)/R,
(46)
восстанавливающий момент – силой тяжести
МВОС = 0,5magB.
(47)
Приравнивая правые части уравнений (46) и (47), после
преобразования получим
VКР = 0,5magBR/hg = 2,21BR/hg.
(48)
Учет деформации подвески и шин на положение центра масс при
действии поперечной силы выражается в уменьшении плеча
восстанавливающего момента, поэтому критическая скорость с учетом
влияния жесткостей упругих элементов подвески и шин
VКР=2,21BR/[hg+h2KPmП/(0,5СРВР2)+h2ШmП/(0,5СШВ2)+mа/СШ],
где hKP, hШ – плечо крена подрессоренной массы при деформации
подвески и шин соответственно; mП – масса подрессоренная; СР, ВР –
жесткость подвески и база между упругими элементами
соответственно; СШ, В – жесткость шин и колея соответственно; mа –
масса ТС, R – радиус поворота.
30
Рис.15. Схема сил, действующих на ТС при равномерном
повороте без учета деформации подвески и шин
В первом приближении предельную (критическую) скорость
установившегося криволинейного движения по сцеплению находим из
условия равенства поперечной составляющей центробежной силы
инерции и суммарной боковой реакции всех колес ТС, максимальной
по сцеплению: mV2/R = mgУ, откуда
VКР = gУR = 3,13УR,
(49)
где У – коэффициент сцепления колес с опорной поверхностью в
боковом направлении; g – ускорение свободного падения.
Однако формула (49) дает весьма приближенное значение
предельной (критической) скорости и не устанавливает различия по
величине этой скорости для сравниваемых автопоездов (в формулу
не входят конструктивные параметры автопоездов).
Для более точного определения предельной скорости по заносу, а
также для вычисления углов дрейфа автомобиля-тягача и прицепа и
установления критической скорости устойчивого прямолинейного
движения автопоезда необходимо провести полный расчет поворота
автопоезда.
4.3.Угол дрейфа
Для
двухосного
автомобиля-тягача,
в
соответствии
с
определением, угол дрейфа равен углу увода задней оси
tg= = tg2 = XT/RT,
где XT и RT –соответственно смещение центра поворота тягача и
радиус поворота тягача.
Значения XT и RT вычисляются по формулам, определенным при
повороте автопоезда
ХТ = m2VT2/KY2,
(50)
2
RT = [L + V T(m1KY2 – m2KY1)KY1KY2]/tg.
(51)
Для трехосного автомобиля-тягача tg = (XT – XT0)/RT, а значения
XT, XT0 (смещение полюса поворота при VT = 0) и RТ вычисляются
31
также по формулам анализа поворота трехосного автомобиля –
тягача.
4.4. Критическая (граничная) скорость движения СТС
по вилянию прицепа
При достижении определенной скорости (35…40 км/ч и выше) у
прицепа возникают поперечные колебания в горизонтальной
плоскости – виляние прицепа. В результате этого явления
увеличивается
ширина
полосы
движения
автопоезда,
что
отрицательно сказывается на безопасности движения – появляется
опасность заноса прицепа и схода его с дороги; затрудняется
управление автопоездом; повышаются нагрузки на крюке и расход
топлива; увеличивается износ шин и шарнирных соединений,
участвующих в движениях, вызываемых вилянием прицепа.
Виляние прицепа возникает как следствие его начального
отклонения, причинами которого могут быть: выход автопоезда из
поворота; движение прицепа с уводом при наличии поперечного
уклона дороги; наезд его колеса на препятствие и боковой удар;
боковой ветер.
Для анализа рассматриваются поперечные колебания одноосного
прицепа или полуприцепа при следующих допущениях:
сцепка прицепа с тягачом жесткая и беззазорная; колебаниями
прицепа в вертикальной плоскости пренебрегаем; движение в точке
сцепки прямолинейно.
На рис.16 показана расчетная схема одноосного прицепа при
отклонении его продольной оси на угол Г от направления
прямолинейного движения точки сцепки 0, где РСХ и РСУ –
соответственно продольная и поперечная составляющие силы на
крюке; РКП – сила сопротивления движению прицепа; RУ – поперечная
реакция колес прицепа.
Точка П прицепа (середина моста) участвует в двух движениях – в
переносном (продольном) со скоростью V точки 0 и относительном –
колебании относительно 0 с угловой скоростью Г = d/dt.
Линейная относительная скорость точки П будет VОП = LГ.
Суммарная скорость точки П равна VП = V +VОП и составляет с
плоскостью вращения колес угол увода . Этот угол увода равен
сумме двух углов - = + ОП (ОП возникает в результате колебаний
прицепа со скоростью VОП). Учитывая малость углов и ОП, можно
считать, что
ОП = VОП/V и = + ОП = VОП/V + Г или = LГ/V + Г.
Поперечная реакция колес прицепа
RY = КУ = КУ(LГ/V + Г),
где КУ – коэффициент сопротивления уводу оси прицепа.
32
Реакцию колес прицепа RY можно представить
составляющими
RY = KYLГ/V + KYГ = RY + RY.
двумя
Рис.16. Схема действия сил на одноосный прицеп (полуприцеп) при его
случайном отклонении от продольной оси автомобиля-тягача
Составляющая RY = KYГ направлена в сторону равновесного
положения прицепа. Она идентична упругой восстанавливающей силе
при свободном колебании массы на пружине. Коэффициент КУ
аналогичен коэффициенту жесткости пружины, а Г – линейному
перемещению массы. Составляющая RY = KYLГ/V имеет
направление, противоположное скорости VОП, и идентична силе
сопротивления, пропорциональной скорости.
Составим
уравнение
движения
центра
масс
прицепа
относительно точки 0
(JZ + mПС2)d2Г/dt2 = - RYL,
(51)
где JZ – момент инерции прицепа относительно центра масс (точка С);
(JZ + mПС2) – момент инерции прицепа относительно точки 0.
Подставляя значение RY в уравнение (51), после преобразований
получим уравнение свободных колебаний прицепа
d2Г/dt2 + (dГ/dt)КУL2/V(JZ + mПС2) + ГКУL/(JZ + mПС2) = 0. (52)
33
Принимая для двухосного полуприцепа метод, аналогичный
использованному применительно к одноосному, получим уравнение
движения двухосного прицепа
d2Г/dt2 + (dГ/dt)[КУП (L – ℓ)2 + KYBL2]/V(JZ + mПС2) +
+ Г[КУП (L – ℓ)+KYBL]/(JZ + mПС2) = 0,
которое отличается от уравнения (52) только коэффициентами.
При условии КУП = КУВ = КУ формула для определения граничной
по затуханию скорости принимает вид
VГ = 0,5[(L- ℓ)2 + L2] KY/(JZ + mПС2)[(L- ℓ) + L].
Следовательно, все относящееся к анализу свободных колебаний
одноосного прицепа может быть распространено и на двухосный
прицеп (полуприцеп), а также n-осное прицепное звено с учетом его
особенностей.
Критическая скорость по вилянию прицепа VКР.ПР определяется
заездами автопоезда по прямолинейному участку дороги с
асфальтобетонным покрытием с последовательным увеличением
скорости движения и записью траектории движения прицепа. Скорость
движения прицепа при достижении размаха колебаний траектории
прицепа, на 6% превышающего его ширину, считается критической
VКР.ПР.
4.5. Динамическая устойчивость сочлененных многозвенных ТС
при движении на поворот
При криволинейном движении (движении на повороте в плане)
динамическая устойчивость ТС оценивается для двух случаев
движения: криволинейное движение (поворот) ТС на дороге с твердым
покрытием и поворот с малым радиусом [R = (1,3 …1,5)Rmin] на
разбитой грунтовой дороге c углом уклона дороги 10…120 и скоростью
движения до 10 км/ч.
При расчете определяется опрокидывающий момент МОП от центробежной силы, составляющей силы тяжести и ветровой нагрузки и
восстанавливающий момент МВ от составляющей силы тяжести с
учетом поворота подрессоренной массы относительно оси крена при
упругой
деформации
подвески.
Динамическая
устойчивость
оценивается коэффициентом запаса устойчивости КУ, который по
требованию Госгортехнадзора должен быть не ниже 1,26 (КУ =
МВ/МОП).
При повороте ТС с установившейся скоростью на него будет
действовать только центробежная сила, а при входе в поворот с
ускорением - инерционные силы в продольном и поперечном
направлениях и инерционный момент, что с точки зрения боковой
устойчивости является самым неблагоприятным случаем нагружения
ТС. К динамической устойчивости ТС относится также и устойчивость
34
против заноса, определяемая в зависимости от величины сцепления
колес с дорожным покрытием.
Рис.17. Зависимость изменения угловой скорости складывания звеньев по
условию опрокидывания или заноса при различных углах складывания секций:
1 - = 0,04 рад; 2 - = 0,14 рад; 3 - = 0,27 рад; 4 - = 0,4 рад
Параметры системы поворота во многом определяют свойства
поворотливости, поворачиваемости, управляемости и устойчивости.
Так, управляемость и устойчивость зависят от передаточного числа
системы поворота. Для обеспечения хорошей управляемости
рекомендуется, чтобы общее передаточное число
u = max/max = 25…33,
где max = 10 рад/с, max = 0,3…0,4 рад/с – предельная угловая
скорость относительного поворота звеньев сочлененного ТС по
условию опрокидывания или бокового заноса (рис.17).
Допустимая предельная угловая скорость складывания зависит
как от скорости движения, так и от конечного угла складывания .
Следует отметить, что приведенные рекомендации разработаны
для двухосных сочлененных ТС с шинами большого диаметра и
большой жесткости. Поэтому для ТС других типов эти рекомендации
требуют проверки. Кроме того, требуется разработка конструкции и
оценка эффективности введения в систему упругой и демпфирующей
связей для гашения колебаний, нарушающих курсовую устойчивость
движения.
Важной характеристикой поворота сочлененного ТС является
максимальный угол складывания звеньев. Он определяет: с одной
стороны, требующийся радиус поворота звеньев, который должен
быть минимальным; с другой стороны, - расстояния от оси сцепного
устройства до секций, которые также должны быть минимальными.
Выбор этого угла является оптимизационной задачей.
35
Приложение
Решение задач по устойчивости ТС
Таблица 1П
Исходные данные для расчета поперечной устойчивости ТС
Обознач.
параметра
Наименование
параметра
ma
mП
В
ВР
hq
hК
Масса транспортного средства
Подрессоренная масса ТС
Колея
Рессорная база
Высота расположения центра масс
Высота расположения оси крена
(деформация подвески)
Высота расположения оси крена
(деформация шин)
Жесткость подвески (радиальная)
Жесткость шин (радиальная)
Статический радиус колеса
Высота периодической неровности
hШ
СР
СШ
rСТ
Н
Величи
на
Размерн
ость
кг
кг
м
м
м
м
м
Н/м
Н/м
м
м
Задача № 1. Определение максимального угла статической
поперечной устойчивости на косогоре
Примечание. При решении задач принимаем, что мгновенный
центр крена ТС переднего и заднего ходовых частей расположен на одном уровне от опорной поверхности; величина коэффициентов скольжения и качения всех колес постоянная.
Порядок расчета
1.Определение максимального угла статической поперечной
устойчивости
tgmax = 0,5B/hg
2.Определение угла статической поперечной устойчивости
с учетом деформации подвески и шин.
Расчет проводится по формулам:
при упругой деформации подвески
36
tgРmax = 0,5B/hg – mпg hК2sin/( 0,5hgCpBp2);
при упругой деформации шин
tgШ.max = 0,5B/hg - mпghш2sin/hgCш0,5В2,
Расчет проводится методом последовательного приближения:
последовательной подстановкой принятых для расчета величин угла
от минимального до max.
Рис.1П. Схема определения статической поперечной устойчивости ТС на
косогоре при упругой деформации подвески и шин:
а – положение ТС при деформации упругих элементов подвески;
б – положение ТС при радиальной деформации шин
3.Наибольший
угол
поперечной
устойчивости
tg1max
определяется как разность между максимальным углом поперечной
устойчивости и суммой поперечных углов с учетом деформации
подвески и шин: tg1max = tg(Р + Ш).
4. Предельный угол наклона ТС, учитывающий тангенциальную
упругую деформацию шин, определяется по формуле
tgШmax = (0,5B - mgsin/ CШ)/hg.
5.При скольжении ТС максимальный угол поперечной статической
устойчивости определяется из условия равенства поперечной
составляющей силы тяжести и суммарной поперечной реакции колес
максимальной по сцеплению
tgY = Y,
где Y – коэффициент сцепления колес в поперечном направлении
37
(Y – задается
поверхности).
в
зависимости
от
характеристики
опорной
Задача № 2. Определение поперечных колебаний ТС,
движущегося по неровностям
Порядок расчета
1.Расчет критической скорости, определяющей возможность
опрокидывания ТС (рис.2П,а).
Критическая скорость опрокидывания рассчитывается по формуле
Vкр=(SCY/JY)/2. [м/с]
а
б
Рис.2П. Схема определения динамической поперечной устойчивости
ТС при движении по неровностям:
а - схема определения критической скорости; б - схема определения
максимального угла поперечной раскачки ТС
S – длина волны дорожных неровностей, принимается для
одноосного полуприцепа равной S = 2DK.СТ, где DK.СТ – статический
диаметр колеса. Частота вынужденных возмущений дорожных
неровностей = 2V/S; Су – приведенная угловая жесткость упругих
элементов одного борта. В зависимости от заданной схемы подвески
угловая жесткость подсчитывается по одной из формул (4), (5), или
(6) рис.5; Jу – полярный момент инерции подрессоренных масс
относительно продольной оси, величина которого рассчитывается по
формуле
Jy = mп(B02 + H02)/12,
где В0 и Н0 – соответственно габаритная ширина и высота
подрессоренной части ТС.
38
2. Расчет угла поперечной раскачки подрессоренной массы
многоосного ТС при движении по неровностям (рис.2П,б).
Расчет проводится для случая движения по неровностям,
расположенным в шахматном порядке со сдвигом относительно друг
друга на 1800, т.е. на величину . При резонансе = У и = 0,5 угол
поперечных колебаний подрессоренной массы будет максимальным
max = Н/(n - GПhKcosП/0,5CPBP2);
где = 2K/У; 2K = 0,5d2Jу; У2 = (0,5СРВР2n - GПhK cosП)/Jу; У собственная частота поперечных колебаний ТС; Н – угол между
высотой неровности и поверхностью косогора на расстоянии колеи; СР
– вертикальная жесткость упругих элементов подвески; ВР –
рессорная база; n – число осей ТС; GП – сила веса подрессоренной
массы; hK – плечо крена; - коэффициент сопротивления
демпфирующих элементов; d – расстояние между демпфирующими
элементами (принимается равным рессорной базе); Jу – полярный
момент инерции подрессоренных масс относительно продольной оси,
величина которого может быть подсчитана по формуле
Jy = mп(B02 + H02)/12,
где В0 и Н0 – соответственно габаритная ширина и высота
подрессоренной части ТС. Угол поперечного статического наклона
ТС, равный П = + Р + Ш,
где К и Ш – соответственно углы наклона к горизонту
подрессоренной массы за счет деформации подвески и шин, - угол
уклона поверхности дороги (косогора) или на горизонтальной дороге
угол, образованный высотой (впадиной) дорожной неровности по
колее машины.
Примечание
Для получения сравнительных данных необходимо провести расчет
угла раскачки ТС для следующих случаев:
принять cosП = 1, считая угол П (уклон дороги, высоту неровности и
наклон подрессоренной массы за счет деформации подвески и шин)
небольшим;
принять угол П равным углу Н (задается в исходных данных высотой
неровности), образуемому высотой (глубиной) неровности и колеей
ТС, считая суммарный угол наклона ТС за счет упругой деформации
подвески и шин равным нулю;
принять угол П равным рассчитанному в задаче №1, обусловленному
деформацией подвески и шин. Расчет провести последовательно:
принимая вначале угол наклона обусловленный только деформацией
подвески, а затем – только деформацией шин.
Величину
частоты
поперечных
собственных
колебаний
рассчитывают по формуле У = Су/Jу.
39
Задача № 3. Определение поперечной устойчивости ТС,
движущегося на повороте
Определение
предельной
скорости
установившегося
криволинейного движения автопоезда по опрокидыванию на
криволинейном участке дороги радиуса R без учета деформации
подвески и шин проводится по формуле
VКР = 0,5magBR/hg = 2,21BR/hg
Критическая скорость с учетом влияния жесткостей упругих
элементов подвески и шин определяется по формуле
VКР=2,21BR/[hg+h2KPmП/(0,5СРВР2)+h2ШmП/(0,5СШВ2)+mа/СШ],
где hKP, hШ – плечо крена подрессоренной массы при деформации
подвески и шин соответственно; mП – масса подрессоренная; СР, ВР –
жесткость подвески и база между упругими элементами
соответственно; СШ, В – жесткость шин и колея соответственно; mа –
масса ТС, R – радиус поворота.
Рис.3П. Схема определения динамической поперечной устойчивости
ТС при движении на повороте: определение критической скорости
опрокидывания и устойчивости ТС при скольжении
Предельная
(критическая)
скорость
установившегося
криволинейного движения по сцеплению приближенно определяется
из условия равенства поперечной составляющей центробежной силы
инерции и суммарной боковой реакции всех колес ТС, максимальной
по сцеплению
VКР = gУR = 3,13УR,
где У – коэффициент сцепления колес с опорной поверхностью в
боковом (поперечном) направлении дороги; g – ускорение свободного
падения.
40
Литература
1.
Гладов,
Г.И.
Специальные
транспортные
средства.
Проектирование и конструкции: учебник для вузов /Г.И. Гладов, А.М.
Петренко; под ред. Г.И. Гладова. – М.: ИКЦ «Академкнига», 2004. –
320 с.: ил.
2. Гладов, Г.И. Специальные транспортные средства: Теория:
учебник для вузов /Г.И. Гладов, А.М. Петренко; под ред. Г.И.
Гладова. – М. ИКЦ «Академкнига», 2006. – 215 с.: ил.
3. Литвинов, А.С. Автомобиль: Теория эксплуатационных свойств:
учебник для вузов по специальности «Автомобили и автомобильное
хозяйство» / А.С. Литвинов, Я.Е. Фаробин. – М.: Машиностроение,
1989. – 240 с.: ил.
4. Смирнов, Г.А. Теория движения колесных машин: учебник для
вузов /Г.А. Смирнов. - 2-е изд., доп. и перераб. – М.:
Машиностроение, 1990. -352 с.
41
Оглавление
Введение………………………………………………………………….3
1. Общие понятия, оценочные показатели устойчивости СТС….3
2. Статическая поперечная устойчивость…………………………..7
2.1. Определение параметров ТС, влияющих на поперечную
устойчивость…………………………………………………………… 7
2.2. Влияние подвески и ее кинематики на перераспределение
вертикальных реакций на колесах…………………………………. ..8
2.3. Определение угловой жесткости подвески…………… … .12
2.4. Определение положения центра масс (центра тяжести)…. .13
2.5. Определение поперечной устойчивость ТС
на косогоре…………………………………………………………… …15
3. Влияние конструктивной схемы СТС на поперечную
устойчивость…………………………………………………………… 19
3.1.Конструктивные опорные схемы СТС………………………... 19
3.2. Четырехопорная схема………………………………………… 20
3.3. Трехопорная схема……………………………………………
22
3.4. Влияние деформации грунта……………………………… … 23
4. Динамическая поперечная устойчивость СТС………………
24
4.1. Поперечная устойчивость СТС при прямолинейном
движении по неровностям……………………………………… .. . 24
4.2. Предельная (критическая) скорость установившегося
криволинейного движения……………………………………… … ..28
4.3.Угол дрейфа……………………………………………………… ..29
4.4. Критическая (граничная) скорость движения
СТС по вилянию прицепа…………………………………………… .30
4.5. Динамическая устойчивость сочлененных
многозвенных ТС при движении на поворот. …………………… 32
Приложение ……………………………………………………… …. ..34
Литература…………………………………………………… …… …..39
42
Учебное издание
ПЕТРЕНКО Александр Михайлович
УСТОЙЧИВОСТЬ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Учебное пособие
Редактор Н.П. Лапина
Подписано в печать ………………..г.
Формат 60х84/16. Бумага офсетная.
Усл. печ. л. 2,6..Уч. изд. л…2,1……….
Тираж 100……..экз. Заказ……….
Цена 45 .руб.
43
Ротопринт МАДИ.
125319, Москва, Ленинградский проспект, 64