Потенциальная энергия и сила поля
реклама

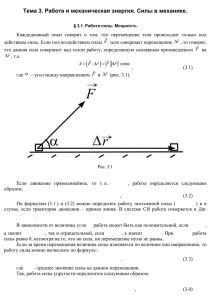
Тема5 Законы сохранения в механике §5.1. Импульс материальной точки Импульсом материальной точки массой m , движущейся со скоростью называют векторную физическую величину, равную произведению массы точки на ее скорость: P m . (0.1) Обратим внимание, что в литературе предыдущих лет широко использовался термин "количество движения", в настоящее время вместо него рекомендовано использовать термин "импульс". Дифференцируя соотношение (2.19) по времени, получим: dP d d m m ma . dt dt dt Из последнего соотношения следует, что уравнение второго закона Ньютона можно записать следующим образом: dP F. dt (0.2) Известно, что первая производная некоторой величины по времени характеризует скорость ее изменения, поэтому уравнение (2.20) читают так: скорость изменения импульса материальной точки равна действующей на нее силе. Пусть на материальную точку m действует несколько постоянных сил F1, F2 ,..., Fi . Обозначим равнодействующую этих сил через R : R F1, F2 ,..., Fi , и пусть t – время действия этих сил. Разделим этот промежуток времени на малые промежутки dt . За время dt , под действием внешних сил скорость материальной точки изменится в соответствии со вторым законом Ньютона: d ma m R. dt Разделяя переменные в последнем соотношении R d dt , m интегрируя по времени в пределах от t1 до t 2 ( t t2 t1 ) , получим: и R 0 t . m Преобразуем полученное выражение к виду, определяющему изменение импульса: m m0 P Rt . (0.3) В проекциях на оси координат формула (2.21) записывается так: mX mX 0 RX t mY mY 0 RY t m m R t Z0 Z Z (0.4) Импульс действия силы – векторная величина, равная произведению силы F на время ее действия t . Смысл соотношения (2.21) может быть выражен следующим образом: приращение импульса материальной точки равно импульсу действия силы dP K Fdt (2.23а) P K Ft . (2.23б) или Если сила F изменяется с течением времени, то импульс действия силы K равен t2 K Fdt , (0.5) t1 где t1 и t 2 время начала и окончания действия силы. §5.2. Работа силы. Мощность Элементарной работой dA силы F на элементарном перемещении dS называют скалярную физическую величину, равную скалярному произведению вектора силы F и вектора перемещения dS : dA FdS FdS cos FdS dS , здесь через FdS (2.35) обозначена проекция вектора силы на направление перемещения dS . В общем случае, переменной силы F когда материальная точка под действием движется по некоторой криволинейной траектории L , работа силы равна A FdS FdS cos FS dS L L (2.36) L Это соотношение получено предельным переходом в сумме A dAi Fi dr i i элементарных работ dAi , совершаемых силой на каждом из элементарных перемещений dSi вдоль траектории L : Рис.2.10. К вычислению работы силы. Работа постоянной силы F на перемещении S , как следует из (2.36) равна скалярному произведению вектора силы F и перемещения S : (2.37) А Fdr Fdr cos FS dS , где – угол между векторами F и S , FS – проекция вектора силы на направление вектора перемещения. Если зависимость проекции вектора силы на направление перемещения представлена графически (рис.2.11), то работу силы можно определить как площадь криволинейной трапеции. Рис.2.11. Вычисление работы переменной силы. Наконец, соотношение (2.36) может быть записано для случая действия нескольких сил Fi . Пусть равнодействующая R равна: R Fi , i тогда: Rdr Fi dr Fi dr Ai A . i i i (2.38) Последние соотношения выражают следующие утверждения: работа равнодействующей силы равна алгебраической сумме работ, совершенных всеми ее составляющими. Для нахождения работы часто удобно пользоваться следующим правилом: A FdS F1dS1 cos 1 F2 dS 2 cos 2 ... Fn dS n cos n , L L1 L2 (2.39) Ln где L L1 L2 ... Ln : работа, совершенная при перемещении вдоль некоторой траектории, равна сумме работ, совершенных на отдельных участках этой траектории. Скорость совершения работы во времени характеризует мощность. Средняя мощность, развиваемая некоторой силой – это физическая величина, равная отношению работы силы A к промежутку времени, в течение которого эта работа была совершена: N CP N A . t (2.40) Мгновенная мощность – мощность, затрачиваемая (выделяемая) в данный момент времени. Мгновенная мощность – определяется как предел средней мощности (2.40) при условии, что промежуток времени t стремится к нулю. Это позволяет определить мощность как первую производную работы по времени: N dA . dt (2.41) Мощность, сила и скорость движения связаны между собой следующим соотношением: dA FdS dS N F F . dt dt st (2.42) Единицей измерения работы в системе СИ является джоуль (Дж). Один джоуль равен работе, совершаемой постоянной силой в 1Н на перемещении в 1м при условии, что векторы силы и перемещения сонаправлены: 1Дж = 1Н·1м. Единица измерения мощности – ватт (Вт). Один ватт равен мощности, при которой за время 1с совершается работа, равная 1Дж. §5.3. Консервативные и неконсервативные силы в механике Все силы в механике делятся на консервативные и неконсервативные. Такое деление связано с понятием "потенциальная энергия", которое рассматривается далее. В связи с этим, консервативные силы являются потенциальными, а неконсервативные – не потенциальными. Консервативными силами называют силы, работа которых не зависит от формы траектории, а только от начального и конечного положения движущейся материальной точки, к которой они приложены. Консервативные силы зависят от взаимного расположения материальных точек (тел) системы, т. е. от ее конфигурации, а также от положения системы во внешних силовых полях. Отметим сразу, что в механике рассматриваются следующие консервативные силы: сила всемирного тяготения, сила тяжести и упругости. К консервативным силам относят также силу Кулона, описывающую взаимодействие заряженных частиц. Все силы, которые не являются консервативными, например, диссипативные и гироскопические силы, относят к неконсервативным силам. Диссипативными силами называют силы, полная работа которых в замкнутой системе всегда отрицательна. Диссипативные силы зависят не только от взаимного расположения взаимодействующих тел, но и от их относительной скорости. К ним, например, относятся сила трения скольжения, сила сопротивления движению в жидкой или газовой среде. Направление диссипативных сил всегда противоположно направлению относительной скорости взаимодействующих тел. В разделе будет показано, что, в самом общем случае, механическая энергия системы может не сохраняться. Одна из причин этого заключается в действии диссипативных сил, которые приводят к частичному или полному переходу механической энергии во внутреннюю энергию. Гироскопическими силами называют силы, которые действуют перпендикулярно скорости движения частицы (тела) и зависят от ее величины. Гироскопической силой является, например, сила Лоренца FЛ q , B. В силу специфической направленности гироскопических сил они не совершают работы, не изменяют модуль скорости, а только изменяют ее направление. Действительно, вектор векторного произведения , B перпендикулярен , поэтому: dA FЛ dS q , BdS q , BdS 0 . Возвращаясь к изучению свойств консервативных сил, докажем их основное свойство: работа консервативных сил по любой замкнутой траектории равна нулю. Пусть материальная точка (система) из положения 1 перешла в положение 2 по траектории 132 (рис.2.12). Рим.2.12. Свойства консервативных сил. При этом консервативной силой F , действующей на нее, была совершена работа A132 . Предположим, что при переходе в положение 2 по траектории 142 , работа равна A142 . По определению консервативных сил имеем A132 A142 . Заметим теперь, что работы, совершенные на участках 142 ( A142 ) и 241 ( A241 ) отличаются знаком: т. е. A142 A241. Это связано с тем, что на каждом элементарном участке траектории 241 угол между вектором F и вектором перемещения dr2 dr241 является дополнительным к углу между векторами F и вектору dr1 dr142 , который противоположен вектору dr2 . По этой причине знак функции косинуса (и работы) в выражении (2.35) изменяется на противоположный. На основании (2.39) заключаем, что работа консервативных сил по замкнутой траектории 13241 А13241 равна сумме работ А132 и A241 вдоль траекторий 132 и 241 , соответственно: А13241 А132 А241 А132 А142 0 . Сформулированное утверждение доказано. §5.4. Работа силы тяжести Вычислим работу силы тяжести mg , совершаемую при перемещении материальной точки (тела) массой m из положения 1 в положение 2 . Используя формулу (2.36) получим, 2 2 2 2 2 1 1 1 1 1 А12 dA FS dS mg cos S dS mg dS cos S mg dS cos Из чертежа видно, что dS cos dh ; тогда выражение для A12 можно преобразовать так: 2 A12 mg dh mg h2 h1 mg h1 h2 . (2.43) 1 Рис.2.13. К вычислению работы силы тяжести. Полученное выражение для A12 показывает, что независимо от вида траектории работа по перемещению материальной точки (тела) в поле тяжести зависит только от ее начальной и конечной высоты: А12 mgh1 h2 mgh . (2.44) §5.5. Работа силы всемирного тяготения Вычислим работу, совершаемую силой всемирного тяготения со стороны тела массой М при перемещении тела массой m из положения, характеризуемого радиус-вектором r1 в положение с радиус-вектором r2 (рис.2.14). Рис.2.14. Вычисление работы силы тяготения и силы упругости. Тяготеющая масса М расположена в точке О . Гравитационное поле является центральным, поскольку сила тяготения действует вдоль линии соединяющей материальную точку m (или центр масс этого тела) с центром O поля тяготения. По определению работы (2.36) имеем: 2 2 2 1 1 1 A12 dA FS dS F cos dS . Из рисунка видно, что dS cos dr , поэтому dA F r dr и для A12 имеем: 2 2 2 1 1 Mm dr 1 A12 G 2 dr GMm 2 GMm GMm . r r r 1 r1 r2 1 1 1 2 (2.46) Полученное выражение не содержит сведений о траектории движения тела, и можно утверждать, что работа центральной силы зависит только от начального и конечного расстояния r1 и r2 движущейся точки до силового центра. §5.6. Работа силы упругости Вывод формулы для работы силы упругости проводится аналогично выводу для силы всемирного тяготения. Эта работа равна 2 2 2 kr2 kr2 A12 F dr krdr k r cosr , dr dr 1 2 , 2 2 r1 r1 r1 r r r (2.47) Здесь r1 и r2 – величина абсолютной деформации тела в начальном и конечном состояниях. Эти деформации представляют собой координаты точки приложения внешней (деформирующей) силы при условии, что начало координат соответствует недеформированному состоянию тела. Как в ранее рассмотренных случаях, работа силы оказывается независимой от формы траектории точки приложения силы, и определяется только ее начальным и конечным положениями. §5.7. Энергия Энергия – это способность тела (системы) совершать работу. Энергия служит универсальной количественной мерой движения и взаимодействия всех видов материи. Различают два вида механической энергии: потенциальную и кинетическую. Потенциальная энергия Пусть на материальную точку или механическую систему действуют только консервативные и гироскопические силы, не зависящие от времени. Говоря иначе, материальная точка находится в стационарном поле сил. Примем условно за нулевое какое-либо состояние системы. Рассматривая иные состояния, назовем потенциальной энергией системы в некотором ином состоянии величину U , равную работе консервативных сил, совершаемой при переводе системы из этого состояния в нулевое. Потенциальной энергией системы в некотором состоянии называют скалярную величину U , равную работе консервативных сил совершаемой при переводе системы из этого состояния в состояние, условно принятое за нулевое. Поскольку работа консервативных сил не зависит от траектории движения материальной точки, то ее потенциальная энергия зависит только от начального состояния системы. Это означает, что потенциальная энергия системы определяется ее состоянием. Возможность произвольно выбрать нулевое состояние (нулевого уровня потенциальной энергии) означает, что потенциальная энергия системы определяется не однозначно, а с точностью до произвольной постоянной C, зависящей от сделанного выбора. Действительно, если за нулевое состояние условно принять состояние, изображаемое точкой O (рис.2.15), то потенциальная энергия U M системы, находящейся в состоянии, изображаемом точкой M , равна работе AMO , совершенной силами поля при переходе из состояния M в состояние O . Рис.2.15. К определению потенциальной энергии. Если принять за начальное точку O | , то потенциальная энергия точки M будет равна работе AMO по перемещению из M в O | . Вследствие | консервативности сил поля работа по траектории MO равна работе по траектории MO |O : AMO AMO| AO|O . Заметим, что работа AO O вполне определенная величина, зависящая | только от выбора точек O и O | . Таким образом, при изменении положения начальной точки O потенциальная энергия изменяется на постоянную величину: U U0 C . Из сказанного выше следует, что потенциальная энергия в положении O равна нулю. Однако ее можно считать равной не нулю, а некоторому произвольному значению. Тогда, при переходе системы из состояния M в нулевое, необходимо говорить не о потенциальной энергии состояния M , а о разности потенциальных энергий в состоянии M и O . Произвол в выборе постоянной C не влияет ни на теоретические выводы, ни, тем более, на ход физических процессов. Существенной оказывается не абсолютная величина потенциальной энергии U , а ее изменение – U , которое не содержит произвольной постоянной C . Пусть система перешла из состояния M в состояние N . Работу AMN , совершенную при этом консервативными силами, можно выразить через потенциальные энергии состояний M и N . Рис.2.16. К определению величины потенциальной энергии. Пусть (рис.2.16) этот переход осуществлен через точку O , по траектории MON . Тогда AMN AMON AMO ANO . По определению потенциальной энергии можно записать: U M AMO C , U N ANO C , где C – одна и та же постоянная. Имеем: AMN U M C U N C U M U N . (2.48) Разность потенциальных энергии начального и конечного состояний U M U N представляет собой ее убыль (убыль равна приращению, взятому с противоположным знаком). Полученное соотношение играет важную роль: оно позволяет утверждать, что: работа консервативных сил, действующих на тела механической системы равна убыли потенциальной энергии системы: A U1 U 2 U 2 U1 U . Конкретный вид функции U , определяющей величину потенциальной энергии зависит от характера действующих сил, или от природы силового поля. В разделах 2.10 - 2.12 получены выражения для работы консервативных сил различной природы. Сравнивая соотношения (2.45), (2.46) и (2.47) с соотношением (2.48) легко придти к выводу, что потенциальная энергия: в поле силы тяжести определяется соотношением U mgh в поле силы упругости определяется соотношением (2.49) U kr2 . 2 (2.50) Определение потенциальной энергии в поле силы всемирного тяготения имеет особенность. Соотношение (2.46) получено непосредственным вычислением работы силы всемирного тяготения: 2 1 1 Mm A12 G 2 dr GMm r r1 r2 1 1 2 (2.51) Как правило, тела считают равной нулю. Это оправдано тем, что на бесконечно большом расстоянии ( r2 ) сила тяготения обращается в ноль и энергия взаимодействия отсутствует, т. е. U 0 . Из формулы (2.48) следует, что A1 U U U1 . Итак, имеем для потенциальной энергии в поле тяготения соотношение U GMm . r (2.52) Потенциальная энергия и сила поля Зная силы, действующие на частицы механической системы, можно определить величину ее потенциальной энергии. Для основных сил, рассматриваемых в механике, соответствующие расчеты были проведены в пунктах 2.9 – 2.12. Можно решить обратную задачу: по величине потенциальной энергии определить величину действующей консервативной силы. Рассмотрим материальную точку m, находящуюся в поле консервативных сил. Очевидно, ее потенциальная энергия зависит от положения, т. е. от координат материальной точки: U U X ,Y , Z . Предположим, что материальная точка m совершила бесконечно малое перемещение dS . Сила, действующая на нее, совершила при этом элементарную работу dA . Известно (2.48), что работа консервативных сил равна убыли потенциальной энергии, т. е.: dA Fdr dU . (2.53) Для определения вектора силы достаточно определить его проекции на оси прямоугольной системы координат. Уравнение (2.53) можно записать так FX dX FY dY FZ dZ dU . (2.54) С другой стороны, дифференциал dU функции U равен: dU Сравнивая U U U dX . X Y Z коэффициенты при dX , dY (2.55) и dZ в последних соотношениях, приходим к выводу, что проекции вектора силы на оси координат равны первым производным потенциальной энергии, взятым с противоположным знаком: U FX X U FY Y U FZ Z (2.56) Соотношения (2.56) принято записывать в векторной форме следующим образом: U U U F FX i FY j FZ k i j k, X Y Z (2.57) или иначе, с использованием градиента – векторного оператора Гамильтона grad i j k. X Y Z Так: F gradU U . (2.58) §5.8. Кинетическая энергия поступательного движения Пусть на материальную точку, масса которой равна m, действует сила F . Запишем уравнение движения этой точки: d ma m F. dt Умножим обе части уравнения скалярно на элементарное перемещение dr и преобразуем полученное выражение с учетом того, что элементарное перемещение dr dt : Таким образом, получаем d m 2 . Fdr dA mdt md d dt 2 (2.59) Проинтегрируем обе части полученного равенства: A m 2 . 2 (2.60) Кинетической энергией поступательного движения материальной точки (тела) называют скалярную величину T m 2 2 , равную одной второй произведения ее (его) массы на квадрат скорости. Соотношение (2.60) позволяет указать физический смысл кинетической энергии. Кинетическая энергия показывает, какую работу совершили силы, чтобы покоящемуся первоначально телу сообщить скорость . Формула для кинетической энергии была получена с использованием второго закона Ньютона, поэтому она верна только в инерциальной системе отсчета. Заметим, что величина кинетической энергии материальной точки зависит от выбора системы отсчета, поскольку ее скорость в разных ИСО различна. Можно показать, что кинетическая энергия T в некоторой системе отсчета K равна: 1 T T ' m 2 m ' , 2 (2.61) где m – масса частицы (тела), T ' – кинетическая энергия материальной точки в подвижной системе отсчета K ' , движущейся со скоростью относительно неподвижной системы K , ' – скорость частицы (центра масс тела) относительно подвижной системы отсчета K ' . Кинетическая энергия – величина аддитивная, т. е. кинетическая энергия механической системы равна сумме кинетических энергий всех ее составляющих: T Ti i i mii2 , 2 (2.62) здесь mi и i – масса и скорость частиц (тел) системы. §5.9. Закон сохранения механической энергии Если на материальную точку (тело) действует сила, то ее (его) кинетическая энергия не остается постоянной. Интегрируя соотношение (2.59), получим, что 2 A12 Fdr T2 T1 . (2.65) 1 Физический смысл полученной формулы T A12 (2.66) заключается в следующем: приращение кинетической энергии материальной точки равно работе равнодействующей сил, приложенных к ней. §5.10. Полная механическая энергия тела (системы) Механической энергией тела (системы) называется сумма его (ее) кинетической и потенциальной энергии: E T U . (2.67) Полная механическая энергия тела в общем случае не является аддитивной величиной. Это связано с тем, что в нее входит внутренняя потенциальная энергия системы, которая, не является аддитивной. Механическая энергия материальной точки (тела) под воздействием консервативной силы Работа консервативной силы при перемещении материальной точки (тела) из положения 1 в положение 2 – A12 может быть представлена как убыль потенциальной энергии A12 U1 U 2 . Соотношение (2.65), в свою очередь, указывает, что в результате совершения работы увеличивается кинетическая энергия. Сравнивая (2.48) и (2.65) приходим к выводу, что: T2 T1 U1 U 2 , (2.68) или собирая члены, соответствующие одному состоянию в различных частях уравнения: T2 T1 U1 U 2 . Полученный результат означает, что величина полной механической энергии частицы (тела) E T U для в поле консервативных сил остается постоянной. При отсутствии неконсервативных сил полная механическая энергия остается постоянной – сохраняется. Увеличение кинетической энергии системы в присутствии консервативных сил происходит за счет убыли ее потенциальной энергии. Наоборот, уменьшению кинетической энергии системы в присутствии консервативных сил соответствует увеличение ее потенциальной энергии. Механическая энергия материальной точки (тела) под воздействием произвольных сил В общем случае на материальную точку (тело) могут действовать силы консервативные F и неконсервативные F * . В этом случае полная работа A12 при перемещении из положения 1 в положение 2 равна сумме работ консервативных и неконсервативных сил A12 A12конс A12* . (2.69) Как известно (2.48), работа консервативных сил равна убыли потенциальной энергии, и соотношение (2.66) можно переписать так A12 T U A12* . (2.70) Преобразуем полученное выражение T U T U E A12* , (2.71) здесь E T U , как всегда, – полная механическая энергия. Полученный результат означает, что работа неконсервативных сил затрачивается на изменение полной механической энергии. При условии, что кинетическая энергия в начальном и конечном положениях системы одна и та же, работа неконсервативных сил идет на изменение потенциальной энергии.