(титаев). - Весь
реклама
. - Весь")
двгупс
В.А. Титаев
1. АВТОМАТИЗАЦИЯ
2. РАСЧЁТА СТРОИТЕЛЬНЫХ
3. КОНСТРУКЦИЙ
на примере ЛИРА-подобных
программных комплексов
ддвгупс
вгупс
Министерство путей сообщения Российской Федерации
Дальневосточный государственный
университет путей сообщения
3.01 Кафедра “Строительные конструкции”
В.А. Титаев
АВТОМАТИЗАЦИЯ РАСЧЁТА
СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ
НА ПРИМЕРЕ ЛИРА-ПОДОБНЫХ
ПРОГРАММНЫХ КОМПЛЕКСОВ
Рекомендовано
редакционно-издательским Советом ДВГУПС
в качестве учебного пособия
для строительных специальностей
Хабаровск
2001
УДК 624.01:004.925.8
ББК Н112.017я73
Т 450
Рецензенты:
Кафедра “Строительные конструкции” Московского
государственного университета путей сообщения
(заведующий кафедрой, д.т.н., профессор В.П. Чирков)
Главный инженер Государственного унитарного
предприятия Хабаровскгражданпроект
В.Т.Храпак.
Титаев В.А.
T 450
Автоматизация расчёта строительных конструкций на
примере ЛИРА-подобных программных комплексов: Учебное
пособие. Хабаровск: Изд-во ДВГУПС, 2001. – 161 с.: ил.
Учебное пособие содержит методические рекомендации и
основные справочные данные по расчёту строительных конструкций
на программных комплексах ПК «Мираж» и ПК «ЛИРА-Windows».
Пособие предусматривает применение одного из указанных
программных комплексов, при расчётах на статические и
динамические воздействия при линейно упругой работе материалов
конструкций.
Учебное пособие предназначено для студентов дневной и
заочной форм обучения строительных специальностей.
Рис. 96, Табл. 53, список лит.– 12 назв.
УДК 624.01:004.925.8
ББК Н112.017я73
© Издательство Дальневосточного государственного
университета путей сообщения (ДВГУПС), 2001
© В.А. Титаев, 2001
(a) Содержание
ВВЕДЕНИЕ ..........................…..............................................…
1.
ОБЩИЕ ПОЛОЖЕНИЯ ...............………………………………..
2.
ВХОДНОЙ ЯЗЫК ………………………………………………….
2.1. Архитектура и синтаксис ………………………………………….
2.2. Оформление титульного листа …………………………………..
2.3. Документ 0 "Заглавный" .………………………………………….
2.4. Документ 1 "Элементы" .............................……………………..
2.5. Документ 2 "Шарниры" .……………………………………………
2.6. Документ 3 "Жесткостные характеристики" ..................………
2.7. Документ 4 "Координаты" …………………………………………
2.8. Документ 5 "Связи" …………………………………………………
2.9. Документ 6 "Типы нагрузок" ………………………………………
2.10. Документ 7 "Величины нагрузок" ………………………………...
2.11. Документ 8 "Расчётные сочетания усилий" ……………………
2.12. Документ 15 "Организация расчёта на динамические
воздействия" ……………………………………….
2.13. Сокращение объёма исходной информации ………………….
3.
БИБЛИОТЕКА КОНЕЧНЫХ ЭЛЕМЕНТОВ .…………………..…
3.1. Универсальный стержень. Конечный элемент 10 ………….…
3.2. Универсальные КЭ для расчета балок-стенок, тонких плит и
пологих оболочек …………………………………………………..
3.3. Универсальные конечные элементы для решения
пространственной задачи теории упругости …………………..
3.4. Специальные конечные элементы ………………………………
3.5. КЭ предназначенный для исключения элементов из
расчётной схемы (тип КЭ – 200) …………………………………
4.
АНАЛИЗ РЕЗУЛЬТАТОВ РАСЧЕТА ……………..………………
4.1. Результаты линейного расчета …………………………………..
4.2. Стержневые элементы …………………………………………….
4.3. Плоские элементы ………………………………………………….
4.4. Пространственные элементы …………………………………….
4.5. Специальные элементы (КЭ 51, 55) …………………………….
4.6. Специальный элемент (КЭ 154) ………………………………….
5.
СУПЕРЭЛЕМЕНТЫ ………………………………………………..
5.1. Общие положения ………………………………………………….
5.2. Исходные данные суперэлемента ………………………………
5.3. Исходные данные основной схемы ……………………………..
(b) 6.
СХЕМ
РЕКОМЕНДАЦИИ ПО СОСТАВЛЕНИЮ РАСЧЕТНЫХ
6.1. Принципы построения конечно-элементных моделей ……….
3
5
6
9
9
10
10
19
20
21
24
25
26
27
29
37
45
47
52
56
62
74
77
78
79
80
81
84
85
86
87
87
88
89
91
91
92
94
6.2. Построение рациональных расчетных схем …………………..
6.3. Глобальная, местная и локальная системы координат ………
6.4. Использование приёма "объединение перемещений" ..……..
6.5. Моделирование податливости узлов при сопряжении
элементов ………………………………………………………….
6.6. Моделирование шарниров в стержневых и пластинчатых
элементах ………………………………………………………….
6.7. Расчет на заданные перемещения …………………………….
6.8. Введение связей конечной жёсткости .………………………..
6.9. Расчет на температурные воздействия ……………………….
6.10. Моделирование предварительного напряжения …………….
6.11. Учёт прямой и косой симметрии ………………………………..
6.12. Расчет конструкций на упругом основании …………………..
6.13. Расчет плит и оболочек, подкреплённых рёбрами ………….
7.
ПРИМЕРЫ ………………………………………………………….
7.1. Расчёт балки ……………………………………………………….
7.2. Расчёт перекрёстной балочной системы на упругом
основании …………………………………………………………..
7.3. Расчёт поперечной рамы одноэтажного стального каркаса
промышленного здания ………………………………………….
7.4. Расчёт плиты защемлённой по двум сторонам
(учёт симметрии) ………………………………………………….
7.5. Организация шарнира в плите защемлённой по двум
сторонам ……………………………………………………………
7.6. Расчёт стеновой панели (удаление элементов из схемы) …
7.7. Определение напряженного состояния ленточного
фундамента (плоская деформация) …………………………..
7.8. Моделирование расчётных схем с использованием
специальных систем координат ………………………………..
7.9. Моделирование конструкции пространственными
конечными элементами ………………………………………….
7.10. Расчёт рамы на заданные перемещения …………………….
7.11. Расчёт коробки методом суперэлементов ……………………
7.12. Расчёт многоэтажной рамы на сейсмическое воздействие..
ЗАКЛЮЧЕНИЕ ……………………………………………………..
Список литературы ..............................................................….
4
95
95
96
97
98
98
99
100
102
107
109
109
113
119
126
130
133
136
140
145
148
151
155
160
161
ВВЕДЕНИЕ
Целью автоматизации проектирования является обеспечение
бездефектного
проектирования,
на
основе
применения
математических моделей обеспечивающих оптимальный уровень
надёжности проектируемых строительных конструкций сооружений.
В пособии на примере программных комплексов ПК «МИРАЖ» и
«ЛИРА-Windows» описан подход к автоматизации расчётов
основывающийся на современных методах строительной механики и
теории упругости. Приведены основные справочные данные для
прочностного расчёта, рассмотрены примеры, раскрывающие
большую часть возможностей ПК «МИРАЖ» и «ЛИРА-Windows», при
линейно упругой работе материалов конструкций.
Универсальность рассматриваемых программных комплексов
позволяет использовать их при автоматизации расчётов различных
объектов
промышленного
и
гражданского
строительства,
мостостроения и специальных инженерных сооружений.
Справочные данные о возможностях и реализации расчётов на
ПК «МИРАЖ» и «ЛИРА-Windows», содержащиеся в пособии,
составлены на основе систематизации данных руководств [1, 2].
Глава 6 содержит рекомендации по составлению расчётных схем
при
моделировании
различных
строительных
конструкций
сооружений, рассматриваемые в книге [3].
Пособие
предназначено
для
студентов
строительных
специальностей для выполнения курсовых и дипломных проектов при
выполнении прочностных расчётов. Оно также будет полезно для
инженеров-проектировщиков
знакомых
с
методом
конечных
элементов и желающих познакомиться с современным программным
обеспечением по автоматизации расчётов строительных конструкций.
Особую благодарность автор выражает коллективу разработчиков
ПК «МИРАЖ» и «ЛИРА-Windows» – сотрудникам НИИАСС г.Киев
Украина, за любезно предоставленную копию ПК «ЛИРА-Windows»
для ДВГУПС.
Автор благодарит заведующего лабораторией кафедры "Здания и
сооружения" ДВГУПС инженера Бойко А.Г. за помощь в графическом
оформлении рукописи пособия.
Официальный адрес в интернет НИИАСС www.lira.com.ua, где
можно получить исчерпывающую информацию по выходу новых
версий ПК «ЛИРА-Windows», а также другую полезную информацию
для инженеров проектировщиков, работающих с указанным
программным обеспечением. Здесь же предоставляется возможность
бесплатно переписать ПК «МИРАЖ» версия 4.3 и демонстрационные
версии ПК «ЛИРА-Windows».
5
1. ОБЩИЕ ПОЛОЖЕНИЯ
Рассматриваемые в пособии программные комплексы (ПК)
«МИРАЖ» и «ЛИРА-Windows» предназначены для численного
исследования на ЭВМ прочности конструкций, а также и для
автоматизированного выполнения ряда расчётных процессов. ПК
«МИРАЖ»
и
«ЛИРА-Windows»
обеспечивают
возможность
исследования широкого класса конструкций: пространственные
стержневые системы, произвольные пластинчатые и оболочечные
системы, мембраны, массивные тела, комбинированные системы
рамно-связевые конструкции высотных зданий, плиты на грунтовом
основании, ребристые пластинчатые системы. Расчёт выполняется на
статические и динамические нагрузки. Статические нагрузки
моделируют
силовые
воздействия
от
сосредоточенных
и
распределенных сил или моментов, температурного нагрева и
перемещений отдельных узлов конструкции. Динамические нагрузки
моделируют воздействия от землетрясения, пульсирующего потока
ветра, вибрационные воздействия от технологического оборудования,
ударные воздействия.
Рассчитываемые
(исследуемые)
объекты
могут
иметь
произвольные криволинейные очертания, локальные ослабления в
виде различной формы отверстий и полостей, различные условия
опирания. ПК «МИРАЖ» и «ЛИРА-Windows» реализуют численный
метод дискретизации сплошной среды метод конечных элементов
(МКЭ). В ПК включено большое количество типов конечных
элементов: стержни, четырехугольные и треугольные элементы
плиты, оболочки, элементы плиты на упругом основании,
пространственные элементы в виде тетраэдра, параллелепипеда,
восьмигранника общего вида, специальные элементы, моделирующие
связь конечной жесткости, упругую податливость между узлами.
Процесс расчёта основной схемы разбит на следующие этапы:
1. Ввод исходных данных, записанных на входном языке и их
синтаксический контроль, контроль суперэлементов - их
геометрической формы, совпадения координат узлов стыковки
суперэлементов с узлами основной схемы, соответствие
жесткостных характеристик, нагрузок и т.п. Сообщения об ошибках,
обнаруженных при контроле конечных элементов, выносятся в
текст протокола прохождения задачи.
2. Перенумерация неизвестных с целью уменьшения профиля
матрицы жесткости (оптимизация).
3. Формирование матрицы жесткости суперэлементов.
4. формирование матрицы жесткости основной схемы.
5. Формирование матрицы загружений (правая часть).
6. Обработка динамических воздействий на основную схему:
6
определение периодов, частот и форм собственных колебаний,
вычисление инерционных сил и т.д.
7. Вычисление перемещений основной схемы.
8. Контроль решения системы уравнений.
9. Вычисление перемещений в суперэлементах.
10. Вычисление усилий.
Результатами работы ПК «МИРАЖ» и «ЛИРА-Windows» являются
перемещения узлов схемы, усилия (напряжения) в ее элементах от
статических и динамических воздействий. В последнем случае
вычисляются частоты, периоды и формы собственных колебаний,
инерционные силы. Эти результаты могут быть отображены
графически и представлены в таблицах, кроме того, они используются
при определении расчётных сочетаний усилий.
Входной язык позволяет корректно и кратко описать расчётную
схему, её топологию, связи и нагрузки, использовать специфику
библиотеки конечных элементов.
Расчётная схема представляет собой идеализированную модель
конструкции. Эту модель необходимо разбить на конечные элементы
и пронумеровать узлы. Следует назначить опорные узлы и ввести в
них соответствующие связи (запретить перемещения по каким-либо
степеням свободы в узле либо ограничить перемещения узла
конечными
элементами,
моделирующими
работу
связи).
Рекомендуется также пронумеровать элементы. Эта нумерация
необходима для определения последовательности задания исходной
информации на входном языке и чтения результатов счёта. Конечные
элементы (КЭ), имеющие одинаковые жесткостные характеристики,
объединяются в жесткостные типы, номера которых рекомендуется
проставить у соответствующего элемента.
Для задания координат узлов используются, декартова,
цилиндрическая и сферическая системы координат.
При расчёте на динамические воздействия на расчётной схеме
(или рядом с ней) указываются расположение и величины весов масс
и другие динамические параметры.
Для фиксации местоположения конечного элемента служит
местная система координат Х1, Y1, Z1, которая является только правой
декартовой. Местная система координат необходима для ориентации
местной нагрузки, главных осей инерции в сечении стержня, усилий и
напряжений, возникающих в элементе.
Способы разбивки системы на КЭ и густота сетки зависят от
условий конкретной задачи (см. рекомендации гл.6). Редкая сетка
может привести к неприемлемо грубому приближению, а
неоправданно густая – к плохой обусловленности системы
канонических уравнений. На обусловленность системы уравнений
7
влияет также соотношение сторон КЭ, поэтому следует отдавать
предпочтение равносторонним конечным элементам.
Каждый узел схемы в общем случае имеет 6 степеней свободы,
которым присвоены следующие номера:
1 – линейное перемещение вдоль оси Х или X1;
2 – линейное перемещение вдоль оси Y или Y1;
3 – линейное перемещение вдоль оси Z или Z1;
4 – поворот вокруг X или X1;
5 – поворот вокруг Y или Y1;
6 – поворот вокруг Z или Z1.
Граничные условия в расчётной схеме могут быть заданы
непосредственно на входном языке (запрет перемещений линейных и
угловых осуществляется только в декартовой системе
координат), либо при помощи связей конечной жесткости
(специальные КЭ см. п.4.5), что особенно эффективно, если в
налагаемых связях необходимо знать реакции. При этом введение
связей, жесткости которых значительно превосходят жесткость
элементов системы, может снизить точность счёта. Если же жесткость
вводимых связей невелика, могут иметь место искажения истинного
решения
для
внешне
статически
определимых
систем.
Рекомендуется, чтобы величина жесткости вводимых связей была на
порядок больше самой большой погонной жесткостной характеристики
из всех элементов системы. Но в каждом отдельном случае нужна
индивидуальная оценка.
Статические воздействия задаются в виде сосредоточенных сил и
моментов как в узлы схемы (узловые нагрузки) по направлениям
общей системы координат, так и на элементы (местная нагрузка) по
направлениям местной или общей систем координат.
Вынужденные динамические воздействия задаются в виде узловых
нагрузок. Инерционные массы сооружения задаются как собственный
вес конструкций, оборудования, при этом допускается использование
как местных, так и узловых нагрузок.
Действие одной нагрузки или группы нагрузок должно быть
объявлено как отдельное загружение - статическое или
динамическое.
При задании исходных данных могут быть задействованы
различные системы единиц измерения (см. п. 2.3.10). Основными
единицами являются единицы длины (L), силы (F), размеров сечений
стержней (s), температуры (t). Единицы измерения прочих величин
являются производными от основных. Базовыми единицами,
используемыми по умолчанию, являются: L – метры; s – сантиметры;
F – тонны силы; t – градусы Цельсия.
Результаты расчёта могут представляться как в исходных
единицах, так и в производных.
8
2. ВХОДНОЙ ЯЗЫК
2.1. Архитектура и синтаксис
Наряду с развитой графической средой, задание исходных данных
в текстовом режиме для ЛИРА-подобных программных комплексов
остаётся наиболее гибким и универсальным, при переходе от одной
версии к другой, способом создания расчётных моделей. Поэтому в
дальнейшем будем ориентироваться на текстовый режим задания
исходных данных.
Исходная информация в ПК «МИРАЖ» и «ЛИРА-Windows»
разделена на отдельные документы см. табл. 2.1.1.
Таблица 2.1.1.
Сводная таблица документов исходных данных
№
Документ
наименование
1
2
Характеристика информации
3
—
Титульный лист
0
Заглавный
1
Элементы
2
Шарниры
3
Жесткостные
характеристики
Данные о наименовании проекта, организации,
выполняющей расчёт, фамилии исполнителей и
проверяющих.
Общая информация: шифр, признак системы,
дробление элементов система координат, наличие
динамических воздействий и т.п.
Тип КЭ, тип жесткости и номера узлов для каждого
элемента.
Номер стержневого КЭ, номер его узла и номер
степени свободы, по направлению которой вводится
степень свободы.
Набор жесткостных характеристик для каждого типа
жесткости.
4
Координаты
Три
координаты
каждого
узла.
сферические, цилиндрические).
5
Связи
6
Тип нагрузок
7
8
15
Величины
нагрузок
Расчётные
сочетания усилий
Характеристики
динамических
воздействий
(декартовы,
Номера узлов и номера степеней свободы, ПО
направлению которых наложены связи или
объединяются
(объявляются
одинаковыми)
перемещения.
Номера узлов или элементов, направление и тип
нагрузки, номер загружения.
Величины, характеризующие нагрузку.
Характеристики каждого загружения, необходимые
для выполнения PCУ.
Информация для расчета на различные виды
динамических воздействий.
9
При задании исходной информации необходимо соблюдать
следующие правила:
каждый документ имеет свой номер и заключается в круглые
скобки: «(»– символ начала документа;
«)» – символ конца документа;
информация, стоящая между символами «)
…
(», не
воспринимается и может использоваться в качестве комментария;
за символом «(» следует номер документа, отделяемый от первой
строки символом «/» (косая черта);
информация в документах разделяется на строки. За номером
документа следует собственно информация. Строка завершается
символом «/» (косая черта);
числа, помещаемые в строке, отделяются друг от друга одним или
несколькими пробелами;
дробная часть числа от целой отделяется символом "." (точка);
информация, находящиеся между парами символов
«/* … */» в
пределах одной строки, игнорируется и может использоваться в
качестве комментария, поясняющего текст исходных данных на
входном языке.
Все документы, кроме заглавного (и титульного листа для ПК
«МИРАЖ»), имеют однородную структуру.
2.2. Оформление титульного листа (ПК «МИРАЖ»)
Для формирования титульного листа расчётов реализована
возможность задания любой текстовой информации после следующих
служебных слов: "ОБЪЕКТ", "ОРГАНИЗАЦИЯ", "ИСПОЛНИЛ",
"ПРОВЕРИЛ". Такая информация используется при документировании
результатов работы ПК. Исходные данные записываются в
следующем виде:
Например:
ОБ: Каркасное здание на коробчатой плите /
ОР: ДВГУПС кафедра Строительных конструкций /
ИС: студент 451 группы Булатов С.Р. /
ПР: профессор Гуревич Я.И. /
2.3. Документ 0 "Заглавный"
2.3.1. Структура документа
Заглавный документ состоит из отдельных строк, каждая из
которых имеет свой номер и содержит информацию о необходимости
выполнения того или иного процесса, а также информацию об
управлении этим процессом.
Отсутствие номера строки является признаком отсутствия строки. В
10
некоторых строках может быть указан только их номер. Остальные
строки могут быть заполнены по мере необходимости, например:
(0/1;ПЛИТА/).
Общие же правила заполнения строк следующие:
строка начинается со своего номера, за которым следует символ
«;» (точка с запятой);
строка заканчивается символом «/»(косая черта);
разделителем элементов списка служит «–» (дефис) или (пробел);
разделителем списков является «;» (точка с запятой);
заголовок списка отделяется от элементов списка символом «:»
(двоеточие).
2.3.2. Шифр задачи (строка 1)
Шифр задачи может состоять из произвольных символов, кроме
«,», « », «;», «/», «()», (запятая, пробел, точка с запятой, косая
черта, круглые скобки и кавычки). Символы, располагаются в
произвольном порядке. После шифра может следовать комментарий
к задаче. Например:
(0/1;ПРОВЕРКА - СТАТИЧЕСКИЙ РАСЧЁТ/)
Данная запись означает, что решаемая задача имеет шифр
«ПРОВЕРКА».
(Следующий текст
воспринимается ПК как
комментарий).
Наличие строки 1 обязательно.
В случае задания в заглавном документе только этой строки
производится статический расчёт и печать результатов для всех
узлов и элементов системы общего вида.
2.3.3. Признак системы (строка 2)
Признак системы – это число, которое характеризует особенности
напряженно-деформированного
состояния
расчётной
схемы.
Благодаря этому признаку производится удаление из системы
уравнений заведомо нулевых неизвестных.
В этой строке указывается одна из следующих цифр:
1 - схема, каждый узел которой содержит две степени свободы:
линейное перемещение вдоль оси X;
линейное перемещение вдоль оси Z.
Схема обязательно располагается в плоскости XOZ.
Этот признак характерен для плоских шарнирно-стержневых
систем (ферм), балок-стенок (плоская задача теории упругости) и др.
2 - схема, каждый узел которой содержит три степени свободы:
линейное перемещение вдоль оси X;
линейное перемещение вдоль оси Z;
поворот вокруг оси Y.
11
Схема располагается в плоскости XOZ.
Этот признак характерен для плоских рам.
3 - схема, каждый узел которой содержит три степени свободы:
линейное перемещение вдоль оси Z;
поворот вокруг оси X;
поворот вокруг оси Y.
Схема располагается в плоскости XOY либо параллельной ей.
Этот признак характерен для балочных ростверков, изгибаемых
плит (в том числе на упругом основании).
4 - схема, каждый узел которой содержит три степени свободы:
три линейных перемещения вдоль осей X, Y, и Z.
Этот признак характерен для пространственных шарнирностержневых систем, массивных тел (трехмерная задача теории
упругости).
5 - схема общего вида, каждый узел которой содержит шесть степеней
свободы:
три линейных перемещения и три поворота относительно осей
X, Y и Z.
По этому признаку считаются схемы общего вида:
пространственные конструкции зданий, оболочки, плиты на упругом
основании совместно с надземным строением и любые структуры,
содержащие разнородные КЭ.
По общему признаку 5 могут быть рассчитаны и все частные
задачи, задаваемые по признакам 1-4.
Отсутствие строки 2 означает, что схема рассчитывается по
признаку 5 (т.е. по умолчанию принимается признак 5).
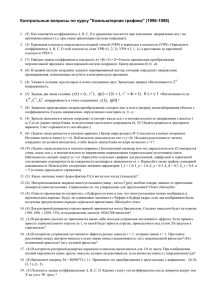
2.3.4. Системы координат (строка 3)
Реализованы цилиндрическая, сферическая и тороидальная
системы координат (см. рис.2.1). Если координаты всех узлов
задаются в декартовой системе, то строка 3 не задаётся. В
противном случае в ней указываются признак специальной системы
координат в заголовке списка и перечень узлов, описываемых в этой
системе. Признак системы координат отделен от списка узлов
пробелом. Если вся система описана в одной и той же системе
координат, то достаточно указать лишь её признак без перечисления
номеров узлов.
12
а)
б)
Рис. 2.1 Специальные системы координат
а) цилиндрическая;
б) сферическая.
2.3.4.1. Цилиндрическая система координат
1 - признак системы координат.
Каждый узел описывается тремя
координатами (Рис. 2.1 а, 2.2):
- полярный радиус, в м;
- полярный угол, в радианах (при
признаке 11 - в градусах);
Z - аппликата, м.
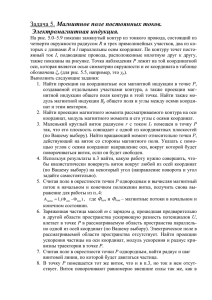
Преобразование
производится
по следующим формулам:
Рис. 2.2. Преобразование
цилиндрической системы координат в
декартову
X 2 cos , Y2 sin ,
Z 2 Z (см. рис.2.1 а, 2.2).
Строка 3 документа 0, имеет вид:
- (0/ … /3;1 №ун - №ук/… /), здесь
схема описана в цилиндрической
системе координат, начиная с узла
№ун и кончая узлом №ук.
Например, запись: - (0/ … /3;1 17-43/ … /),
означает, что узлы от 17 по 43 описаны в цилиндрической системе
координат (в радианах).
2.3.4.2. Сферическая система координат
2 - признак системы координат. Каждый узел описывается тремя
координатами (Рис. 2.1 б, 2.3 а):
- полярный радиус, в м;
13
- полярный угол, в радианах (при признаке 12 - в градусах);
- угол наклона радиуса от вертикальной оси 0
радианах (при признаке 12 - в градусах);
Преобразование производится по следующим формулам:
,
X 2 cos sin , Y2 sin sin , Z 2 cos .
в
Строка 3 документа 0, имеет вид: - (0/… 3:2 №ун - №ук /… /).
Например, запись: (0/… /3:2 42-87/… /)
означает, что узлы с 42 по 87 задаются в сферической системе
координат, остальные узлы описываются в декартовой системе
Z2
Z
Y2
Y
X2
а)
O
O
X
Z2
б)
X2
X
X2
Y2
Y
Z
O1
Z2
Z
O
Y
X2
X1
O
O
X
X
Рис.2.3. Преобразование а) сферической и б) тороидальной
систем координат в декартову.
координат.
2.3.4.3. Тороидальная система координат
Для тороидальной системы требуется задание радиуса круга,
образованного вращением центра окружности Ro. Положительное
14
направление угла для тороидальной системы координат показано
на рис. 2.3 б. Здесь 0 2
Строка имеет следующий вид:
3; 2 №ун - №ук:Ro/
При Ro = 0 строка имеет вид 3; 2 №ун - №ук /.
2.3.4.4. Перенос координат в пространстве
Перенос координат в пространстве осуществляется с помощью
задания признака - 5 строки 3 в документе 0. Формат задания
признака 5 имеет вид:
3; 5 №ун - №ук: A B C /.
Формулы преобразования имеют вид:
X 2 X A, Y2 Y B, Z 2 Z C .
Запись: - (0/ … /3;2 32-41:1.8; 5 47 122:7.1 1.1 5.5/ … .),
означает, что узлы с 32 по 41 задаются в тороидальной системе
координат с радиусом вращения центра окружности, равным 1.8 м;
узлы 121 и 122 переносятся в пространстве на 7.1 м по оси X , на
1.1 м по оси Y и на 5.5 м no oси Z .
2.3.5. Организация вычисления усилий в промежуточных сечениях
и усилий в узлах (строка 4)
В этой строке для стержней указывается количество сечений, в
которых должны быть вычислены усилия. Для прочих конечных
элементов отмечается необходимость вычисления узловых усилий.
Эта строка имеет списковую структуру и может содержать один или
несколько списков. Каждый список начинается с заголовка. При
наличии регулярных числовых последовательностей возможно
сокращение объёма задаваемой информации (см. п.2.13).
Для стержней в заголовке списка указывается количество сечений
и после двоеточия перечисляются номера этих стержней.
Для прочих КЭ в заголовке списка указывается целое число ≥ 1, и
после двоеточия перечисляются номера этих КЭ.
Для стержней, попавших в список с заголовком 1, усилия будут
вычисляться в начале и в конце. Пример:
(0/…/ 4;5:1 3-6 10 15 R 25 2 30 31; 7:40-45 48; 1:100-106 108 110/)
Эта запись означает, что для стержней 1, 3, 4, 5, 6, 10, 15, 17, 19,
20, 23, 25, 30, 31 будут вычислены усилия в пяти сечениях; для
стержней 40, 41, 42, 43, 44, 45, 48 - в семи сечениях; для КЭ 100, 101
102, 103, 104, 105, 106. 108, 110 - будут вычислены узловые реакции.
15
Отсутствие строки 4 означает, что для стержней будут вычислены
усилия в начале и в конце, а для КЭ узловые усилия печататься не
будут.
Для получения усилий и напряжений в узлах плоскостных и
объемных КЭ в заголовке списка указывается число 100.
2.3.6. Управление вычислением и печатью РСУ (строка 8)
Эта строка имеет списковую структуру и заполняется при наличии
документа 8. Здесь перечисляются номера элементов, для которых
необходимо вычислить и напечатать расчётные сочетания усилий.
2.3.7. Организация унификации сечений элементов (строка 12)
Эта строка имеет списковую структуру. В заголовке каждого списка
указывается тип и группа унификации, а в перечислении - номера
унифицируемых элементов. Количество групп в каждом типе - от
одного до девяти.
Реализованы три типа унификации:
1 - сечения унифицируются в одном элементе и в группе элементов,
т.е. группа элементов имеет единственное одинаковое сечение.
2 - элементы унифицируются по соответствующим сечениям, т.е.
группа элементов имеет одинаковое первое, одинаковое второе и
т.д. сечения.
3 - элементы унифицируются, но с учётом симметрии, т.е. группа
элементов, имеет одинаковые первое и последнее сечения, второе
и предпоследнее и т.д.
Тип и группа унификации задаются одним двузначным числом, где
первая цифра означает тип унификации, а вторая - группу.
Пример:
(0/…/ 12;31:1-4; 32:5-10;/)
Здесь элементы 1, 2, 3, 4 составляют первую унифицированную
группу по типу 3, т.е. эти элементы имеют одинаковые первое и
последнее, второе и предпоследнее и т.д. сечения. Элементы 5, 6, 7,
8, 9, 10 составляют вторую унифицированную группу по типу 3.
Унификация производится на уровне расчётных сочетаний усилий,
поэтому РСУ производится не для каждого элемента, а для каждой
группы элементов.
Запрещается вводить в одну группу унификации конечные
элементы, имеющие различную ориентацию местных осей координат.
Отсутствие этой строки означает отсутствие унификации.
2.3.8. Организация различных групп РСУ (строка 15)
Эта строка заполняется при наличии документа 8 в том случае,
16
когда коэффициенты РСУ, задаваемые в документе 8, для разных
групп элементов схемы неодинаковы.
В документе 8, начиная с 10-го столбца, указываются величины
коэффициентов, с которыми данное загружение будет участвовать в
выборе РСУ. В строке 15 в заголовке указываются номера столбцов
коэффициентов, с которыми входит в РСУ группа элементов. Номера
этих элементов перечисляются после заголовка. При этом столбец 10
соответствует первому сочетанию и при заполнении строки 15
получает номер 1, столбец 11 - 2, столбец 12 - 3 и т.д.
Пример:
(0/…/ 15; 1 2 3:1-7 11 R 29 3; 4 5 6:8-10 12 R 27 3 13 R 28 3/)
Здесь элементы 1-7, 11, 14, 17, 20, 23, 26, 29 войдут в РСУ с
коэффициентами, указанными в столбцах 10, 11, 12 документа 8, а
элементы 8-10, 12, 13, 15, 16, 18, 19, 21, 22, 24, 25, 27, 28 войдут в
РСУ с коэффициентами из столбцов 13, 14, 15 документа 8.
Количество чисел в заголовке указывает количество исследуемых
сочетаний в следующем порядке:
первое число - первое основное сочетание;
второе число - второе основное сочетание;
третье число - особое сочетание.
Отсутствие этой строки означает наличие только одной группы
сочетаний, объединяющей элементы, перечисленные в строке 8
заглавного документа.
Один и тот же элемент может входить не более, чем в две группы
сочетаний.
2.3.9. Допускаемое количество крановых и тормозных загружений,
входящих в расчётные сочетания усилий (строка 16)
В строке указываются два числа:
количество одновременно учитываемых крановых загружений;
количество одновременно учитываемых тормозных загружений.
Запись в этой строке имеет вид: (0/…/ 16;3 2/), что означает
одновременный учёт не более трёх крановых и двух тормозных
загружений. При наличии крановых и тормозных загружений и
отсутствии данной строки производится одновременный учёт двух
крановых и одного тормозного загружений.
Эта строка заполняется только при наличии крановых загружений.
2.3.10. Единицы измерения (строка 33)
Эта строка предназначена для задания размерностей величин в
исходных данных. Базовыми единицами линейных величин являются
метры, силовых - тонны, температурных - градусы Цельсия.
В строке через пробел указываются обозначения единиц и
17
переводные коэффициенты по отношению к базовым единицам.
Строка имеет вид: (0/…/ 33: L 1 s 2 F 3 t 4 /).
Здесь L, s, F, t - обозначения единиц измерения (см. п.1); 1 4
переводные коэффициенты к базовым.
Пример:
(0/… 33;СМ 100 ММ 1000 KG 1000 С 1/)
Здесь линейные размеры заданы в сантиметрах, размеры сечения
стержня - в миллиметрах, усилия - в килограммах, температура - в
градусах Цельсия.
В реализованы следующие единицы измерения: метры - М,
дециметры - DM, сантиметры - СМ, миллиметры - ММ, ярды - YD,
футы FT,
тонны - Т, килограммы - KG, Ньютоны - N, деканьютоны - DAN,
килоньютоны - KN, меганьютоны - MN, фунты - Р, градусы Цельсия С, Кельвина - К, Фаренгейта - F.
2.3.11. Задание степеней свободы для динамических воздействий
(строка 34)
Эта строка используется для назначения узлов сосредоточения
инерционных масс в расчётной схеме и степеней свободы, вдоль
которых допускаются колебания этих масс.
Здесь, после номера строки указываются номера степеней
свободы и после двоеточия перечисляются номера узлов, в которых
будут сосредоточены массы. Пример:
(0/…/ 34:1 2:1-15;3:17 30 42/)
Здесь массы, собранные в узлы с 1-го по 15-й, колеблются вдоль
осей X и Y, а массы сосредоточенные в узлах 17, 30 и 42, колеблются
вдоль оси Z. При этом сумма масс в этих узлах соответствует той
массе конструкции, которая задана пользователем в документах 6 и 7.
При отсутствии строки инерционные массы и степени их свободы
соответствуют описанию их в документе 6.
2.3.12. Организация расчёта на динамические воздействия
(строка 35)
В этой строке указывается номер строки документа 15, где описаны
характеристики динамического воздействия, и после двоеточия
перечисляются номера соответствующих загружений.
Пример:
(0/…/ 35; 1:7 8; 2:10 13/)
Здесь загружения 7 и 8 представляют собой динамические
воздействия с характеристиками, указанными в первой строке
документа 15, а загружения 10 и 13 учитывают данные второй строки.
Отсутствие этой строки означает отсутствие динамических
18
воздействий.
2.3.13. Номера узлов стыковки суперэлементов (строка 36)
Эта строка используется при описании расчётных схем,
содержащих суперэлементы. В противном случае она не задается.
После номера строки указываются номера базисных узлов
стыковки суперэлемента с узлами основной схемы, а затем все прочие
узлы стыковки. Пример:
(0/…/ 36; 7 24 13 1-6 8-12/)
Здесь узлы 7, 24; 13 являются базисными, после которых
перечислены все прочие стыковочные узлы (см. главу 5).
2.3.14. Корректировка документа 1 (строка 38}
Эта строка предназначена для корректировки в документе 1 типов
конечных элементов и их жесткостей. После номера строки следует
требуемый номер типа конечного элемента и, через пробел, тип его
жесткости. За тем, после двоеточия указывается список номеров
элементов в схеме, для которых производится эта корректировка.
Пример:
(0/…/ 38; 21 2: 9-33:36 0: 47-64; 41: 14-71/)
Здесь элементы с 9 по 33 приобретают, тип конечного элемента 21
и тип жесткости 2, а элементы с 47 по 64 приобретают тип конечного
элемента 36, а тип жесткости не меняется (задан ноль перед
двоеточием), элементы с 14 по 71 приобретают тип 41 без изменения
типа жесткости.
Возможно изменение только типа жесткости: Пример:
(0/…/ 38; 0 5:11-43/)
Здесь номера типов жесткости элементов схемы с 11 по 43
заменятся на номер 5.
2.3.15. Наименование загружений (строка 39)
В этой строке в соответствии с количеством
загружений записываются их наименования. Пример:
(0/…/ 39; 1: Собственный вес; 2: Временная; /)
Задание этой строки не обязательно.
задаваемых
2.4. Документ 1 "Элементы"
В первой графе этого документа указывается номер типа конечного
элемента из библиотеки конечных элементов (КЭ глава 3), во второй номер строки документа З, в которой заданы жесткостные
характеристики для этого элемента (номер типа жесткости). В
остальных графах – номера узлов, относящихся к рассматриваемому
19
конечному элементу. Количество граф, где указываются номера узлов,
зависит от типа конечного элемента. Для стержней – 2 графы, для
четырехугольных конечных элементов – 4 и т.д.
Если узлов меньше чем 4, строка может быть неполной; если узлов
больше чем 4 то их номера указываются в следующих строках с
проставлением
нулей
в
Пример:
первых двух графах, Числа в
графах
разделяются
Номер
Тип жесткости Номера узлов
типа КЭ в документе 3 1
2
3
4
пробелами; в конце каждой
1
15
3 10/
строки ставится косая черта.
51
21
12/
В
примере
содержится
31
36
34 35 40 41/
информация
о
трех
0
0
24 25 48 49/
элементах:
первый элемент: тип КЭ 1, тип жесткости 15 (строка 15 документа 3): элемент содержит два
узла: номер первого - 3, второго - 10;
второй элемент: тип - 51, тип жесткости 21. элемент содержит один
узел - 12;
третий элемент: тип КЭ 31, тип жесткости 36, элемент содержит 8
узлов - 34, 35, 40, 41, 24, 25, 48, 49.
Наличие этого документа обязательно.
2.5. Документ 2 "Шарниры"
Этот документ предназначен для описания прикрепления стержней
(и только стержней) к узлам расчётной схемы: освобождение
угловых связей (шарнирное присоединение) или освобождение
линейных связей. Каждая строка этого документа содержит три
графы:
первая – порядковый номер стержня в схеме;
вторая - номер узла этого стержня (1 - начало стержня, 2 - конец
стержня, номер узла стержня считается первым, если в документе
1 он указан первым);
третья - номер степени свободы, относительно которой
освобождается связь.
Освобождение связи производится относительно местных осей
координат.
Строки, приведенные в примере,
Пример:
означают, что стержень 36 имеет
шарниры с двух сторон относительно
Номер
Номер Степень
оси X1, а в конце стержня 15
стержня
узла
свободы
освобождена связь вдоль оси Y1.
36
1
4
Если в задании шарниров в
36
2
4
стержнях нет необходимости, то
15
1
2
документ 2 не задаётся.
20
2.6. Документ 3 "Жесткостные характеристики"
Каждая строка этого документа содержит 10 граф. В первой графе
указывается номер типа жесткости, соответствующий номеру во
второй графе документа 1. Для каждого типа КЭ задаётся
определённый набор жесткостных характеристик в определенном
порядке. Если количество этих характеристик больше 9, то
продолжение описания производится в следующей строке после
проставления нуля в первой графе.
Для стержневых элементов в этом документе могут указываться:
характеристики в порядке, обусловленном формой сечения (табл.
2.6.1) с идентификатором Si, где i – номер формы сечения (i=1…8).
численные жесткостные характеристики в порядке и составе,
обусловленном типом конечного элемента; эти характеристики
всегда указываются первыми без идентификатора:
EF - продольная жесткость;
Ely - изгибная жесткость относительно оси Y1;
ElZ - то же относительно оси Z1;
GIK - жесткость на кручение;
GFY - сдвиговая жесткость вдоль оси Y1;
GFZ ~ то же вдоль оси Z1;
дополнительные
характеристики
с
соответствующими
идентификаторами;
ядра сечений в метрах после идентификаторов Y и Z (по два числа
после каждого).
Если для стержня сечение задаётся с помощью идентификатора
Si, то геометрические и жесткостные характеристики вычисляются
автоматически.
Если одновременно задать размеры сечения и величины ядер
сечения (с идентификаторами Y и Z), то вычисление расчётных
сочетаний усилий производится по величинам заданных ядер
сечения.
Для вычисления расчётных сочетаний усилий в стержнях при задании
типа жесткости с помощью только численных жесткостных
характеристик, обязательно задаются размеры ядра сечения в обоих
направлениях (с идентификаторами Y и Z).
Жесткостные характеристики всегда записываются первыми в
следующем порядке: EF, ElY, ElZ, GIK, GFY, GFZ; в зависимости от типа
КЭ стержня изменяется лишь их количество; если сдвиговые
жесткости не учитываются, последние два числа можно не задавать.
Порядок задания идентификаторов произвольный.
Сечение типа S8 располагается всегда в первом квадранте, а
жесткостные характеристики вычисляются относительно главных
центральных осей инерции (табл. 2.6.1).
21
Таблица 2.6.1
4. Стандартные формы сечений стержней
Идентификатор
формы сечения
Порядок задания
характеристик
Эскиз сечения
1
2
3
S0
E, b, h
S1
E, b, h, b1, h1
S2
E, b, h, b1, h1
S3
E, b, h, b1, h1, b2, h2
продолжение таблицы 2.6.1
22
1
2
S4
E, b, h, b1, h1
S5
E, b, h, b1, h1
S6
E, D, d
S7
E, b, h, b1, h1, h2, h3
S8
E, bi, hi, yi, zi
3
Для плоскостных конечных элементов задаются характеристики,
описанные в главе 3. Для однослойных изотропных плоскостных
23
конечных элементов обычно задаются E (модуль упругости, т/м2),
(коэффициент Пуассона) и (толщина элемента, м), а для объемных
- E и.
Пример:
Номер типа
жесткости
10
11
12
13
1
2
ЗЗЕ5
34600
S3
S1
0.25
2560
25Е5
ЗЕ6
3
0.8/
S0
20
30
4
5
24Е5 40
80
30
70
65
6
60/
15
24/
7
35
8
9
20
Здесь:
тип жесткости 10 - заданы: E = 3300000 т/м2, = 0.25, = 0.8 м;
тип жесткости 11 - заданы: EF= 34600 т, ElY= 2560 тм2,
прямоугольное сечение (S0), в котором E =2400000 т/м2, b=40 см,
h=60 см;
тип жесткости 12 - двутавровое сечение (S3), в котором E =2500000
т/м2, b=20 см, h=80 см, b1=З0 см, h1=15 см, b2=35 см, h2= 20 см,
тип жесткости 13 - задано тавровое сечение с полкой внизу, в
котором E =З000000 т/м2, b=30 см, h=70 см, b1=65 см, h1=24 см.
Этот документ даёт возможность использования один и тот же
номер жесткости для задания различных характеристик, участвующих
в различных стадиях расчёта.
Пример:
Номер типа
жесткости
24
0
1
2
478Е4
0.037/
2500
3
4
48E3 7100 Y
5
6
0.08
7
0.2
8
Z
9
0.12/
В этом примере заданы четыре жесткостные характеристики:
EF=4780000 т, ElY=2500 тм2, EIZ=48000 тм2, GIK=7100 тм2. Они будут
участвовать в статическом расчёте. При подборе РСУ будут учтены
заданные ядра жесткости Y1=0.08 м, Y2=0.2 м, Z1=0,12 м и Z2=0.037 м.
Задание документа 3 обязательно.
2.7. Документ 4 "Координаты"
Каждая строка документа содержит три графы и соответствует
информации об одном узле. В зависимости от признака системы
координат в строке 3 заглавного документа описываются следующие
координаты:
24
X, Y, Z- признаки системы
координат 0, 3, 4, 5, 6 (декартовы);
Номер
, , z
признаки
системы
X ( ) Y ( ) Z ( )
узла
координат 1, 11 (цилиндрические);
1
1.5
2.8/
, ,
- признаки системы
2
2.3
3.7
8.8/
координат 2, 12 (сферические,
3
4.1
30
10/
тороидальные).
4
5.7
30
10/
Если третья графа не заполняется,
5
2.94
3.75
5/
то третьей координате автоматически
6
2.94
7.5
5/
присваивается значение - 0.
7
2.94
1.875 2.5/
Так как строки документа не
8
1.8
0.823 0.156/
нумеруются, то координаты задаются
в порядке возрастание номеров узлов.
Наличие документа 4 обязательно.
Для признака системы 3 графа 3 может отсутствовать.
Если в строке 3 документа 0 записать: 3;12 3-7; 2 8/, то это будет
интерпретировано ПК следующим образом: узлы 1 и 2 описываются в
декартовой системе координат, узлы 3 … 7 описываются в
сферической системе координат с углами и задаваемыми в
градусах; узел 8 описан также в сферической системе координат, но с
углами, задаваемыми в радианах (см. раздел 2.3.4).
Пример:
2.8. Документ 5 "Связи" (и объединение перемещений)
Каждая строка этого документа содержит семь граф. В первой
графе указывается номер узла, в котором накладываются связи. В
остальных шести графах - номера степеней свободы, на которые
наложены связи в этом узле. Связи накладываются в общей системе
координат и обозначаются следующим образом:
1 - линейное перемещение вдоль оси Х;
2 - то же, вдоль оси Y;
3 - то же, вдоль оси Z;
4, 5, 6 - углы поворота вокруг осей X, Y, Z соответственно.
Этот документ используется также для объединения перемещений
в узлах. Для этого в одной из строк указывается номер любого узла из
объединяемой группы и номера объединяемых степеней свободы, а в
последующих строках перечисляются только номера оставшихся
узлов из объединяемой группы.
Объединение
перемещений
и наложение
связей могут
записываться в произвольном порядке.
В примере в узле 15
наложены связи по всем направлениям; в узле 9 наложены связи по
направлению степеней свободы 1 и 3 (по линейным перемещениям
вдоль осей X, Z).
25
Пример:
Графы для задания связей
по степеням свободы
Номер
узла
15
9
16
17/
18/
19/
23
27
28/
29/
30/
1
2
3
1
1
2
2
3/
4
3
1
2
4
3/
5
4
4
5
5
6
6/
6/
6/
В узлах 16, 17, 18, 19
объединяются
перемещения
вдоль оси Y и повороты вокруг
оси Х и Z; в узле 23 запрещено
перемещение вдоль оси Х и
все повороты; в узлах 27, 28,
29,
30
объединяются
перемещения вдоль осей Y и Z.
Наличие этого документа
необязательно (например, при
расчёте плиты на упругом
основании,
либо
при
использовании
элементов
упругой связи -51).
2.9. Документ 6 "Типы нагрузок"
Каждая строка этого документа соответствует одной нагрузке и
содержит пять граф. В первой указывается номер загружаемого узла
или элемента. Во второй – вид нагрузки (см. табл. 2.9.1).
Таблица 2.9.1
5. Виды нагрузок на элемент
В местной системе
координат
В общей системе
координат
5 – местная сосредоточенная
6 – местная равномерно распределенная
8, 18, 38 – местная температурная
15, 35 - местная сосредоточенная
16 - местная равномерно распределенная
0 – узловая нагрузка, ориентированная относительно общей системы
координат;
2 – узловая нагрузка относительно заданной специальной системы
координат;
11 – местная нагрузка на нуль-элемент, моделирующая заданное
перемещение.
60 – заданное смещение узла (для «ЛИРА-Windows»).
Местная нагрузка расположена в пределах элемента, место её
приложения определяется порядковым (по документу 1) номером
элемента, а также величинами привязок.
В третьей графе задаётся направление нагрузки:
1 - вдоль оси Х (если нагрузка местная, то Х1);
2 - то же, Y или Y1;
3 - то же, Z или Z1;
4 - вокруг оси Х или Х1, если нагрузка представляет собой момент;
26
5 - то же для оси Y или Y1;
6 - то же для оси Z или Z1.
Таким образом, сочетание цифр второй и третьей графы
характеризует тип нагрузки. Возможность задания того или иного типа
нагрузки на различные КЭ описана в главе 3.
В четвёртой графе указывается номер строки документа 7, в
которой заданы численные значения величин нагрузки, её привязки и
др.
В пятой графе проставляется номер загружения, которому
принадлежит данная нагрузка.
Пример:
Номер узла
или элемента
3
56
23
Вид
нагрузки
0
6
8
Направление
нагрузки
3
5
1
Номер строки
документа 7
6
9/
14
Номер
загружения
2/
3/
В этом примере: в узел 3 приложена сосредоточенная сила по
направлению третьей степени свободы (вдоль оси Z), её величина
указана в строке 6 документа 7. Нагрузка относится ко второму
загружению. На элемент 56 действует распределённая нагрузка в
виде момента относительно оси Y1, ее величина указана в строке 9
документа 7. Нагрузка относится также ко второму загружению (по
умолчанию номер загружения принят по предыдущей строке). На
элемент 23 действует температурный нагрев вдоль оси Х1, величина
температуры задана в строке 14 документа 7. Нагрузка относится к
третьему загружению.
2.10. Документ 7 "Величины нагрузок"
Каждая строка этого документа состоит из 5 граф. В первой графе
указывается номер типа нагрузки, соответствующий числу в графе 4
документа 6. Если количество величин, характеризующих данный тип,
больше 4, то их записывают в следующей строке, проставив ноль в
первой её графе.
Величины, задаваемые в этом документе и характеризующие тип
нагрузки, представляют собой величины сил, их привязки к началу
элемента, температурный перепад и др.
Узловая сосредоточенная сила или момент, равномерно
распределенная нагрузка описываются одним числом - их величиной.
Местная сосредоточенная нагрузка описывается величиной и
привязкой к первому узлу.
Положительные нагрузки действуют против соответствующих осей
и по часовой стрелке, если смотреть с конца соответствующих осей.
27
Заданное смещение считается положительным, если направлено
вдоль оси или против часовой стрелки.
Здесь в строке 15 описана
местная
сосредоточенная
Номер
Величины нагрузок
сила величиной 7.2 т с
строки
1
2
3
4
привязкой к первому узлу
15
7.2
3.35/
3.35 м; В строке 11 описаны
11
10
6.2
6
0.5/
величины для расчёта на
0
9
5.7
24/
импульсивное воздействие.
Особенности
заполнения
документа 7 при наличии динамических воздействий описаны в п.
2.12.7.
Пример:
2.10.1. Задание узловых нагрузок в специальных системах координат
Каждый узел, описанный в специальной системе координат, имеет
свою местную - декартову систему координат, в которой может
задаваться узловая нагрузка. При этом направление осей местной
системы координат образуется по следующему правилу:
в цилиндрической системе координат (см. рис. 2.1а, 2.2) оси
направлены:
X2 - параллельно радиусу от центра;
Y2 - перпендикулярно X2 против часовой стрелки, если
смотреть с конца оси Z;
Z2 - совпадает с направлением оси Z;
в сферической системе координат (см. рис. 2.1б, 2.3а):
X2 - по радиусу от центра;
Y2 - по меридиану против часовой стрелки, если смотреть с
конца оси Z;
Z2 - по меридиану (составляет с X2 и Y2 правую тройку).
Для задания узловой нагрузки в любой из специальных сметем
координат необходимо в графе 2 документа 6 записать цифру 2. В
графе 3 документа 6 задаётся номер направления нагрузки: 1, 2, 3 соответственно вдоль осей X2, Y2, Z2; 4, 5, 6 – моменты относительно
тех же осей.
Пример:
(6/ … /31 2 1 7 3/38 2 5 12 3/24 2 3 3 3/ … /),
здесь на узел 31 действует сила вдоль оси Х2, на узел 38 - момент
вокруг оси Y2, на узел 24 сила вдоль оси Z2.
2.11. Документ 8 "Расчётные сочетания усилий" (РСУ)
28
Информация для выбора РСУ задается в строках 8, 15, 16
заглавного документа и в настоящем документе.
При определении наиболее опасных РСУ учитываются требования
нормативных документов и логическая зависимость между
загружениями.
В этом документе каждому загружению соответствует одна строка.
В первой графе указывается признак загружения:
0 - постоянное;
1 - временное длительно действующее;
2 - кратковременное;
3 - крановое;
4 - тормозное;
5 - сейсмическое;
6 - особое (кроме сейсмического);
7 - кратковременное, длительность действия которого мала;
9 - статическое ветровое при учёте пульсации ветра.
В графе 2 даётся информация об объединении временных
загружений (признаки 1, 2, 7). Если группа временных загружений
помечена во второй графе одинаковой цифрой, то она может быть
включена в первое основное сочетание в любой комбинации сумм
этих загружений. Для прочих загружений в этой графе проставляется
ноль. Количество групп объединения – от 1 до 9.
В графе 3 единицей отмечаются знакопеременные загружения.
Графа 4 служит для описания взаимоисключающих загружений.
Каждой группе таких загружений присваивается номер от 1 до 9,
которым отмечаются все загружения данной группы.
Графа 5 всегда зануляется.
В графах 6 и 7 указываются номера сопутствующих загружений,
т.е. таких, действие которых обусловлено наличием данного
загружения. В частности, если некоторая строка документа 8
описывает крановое загружение, то в графах 6 и 7 могут быть указаны
номера тормозных загружений, и в этом случае они попадают в РСУ
только совместно с крановыми.
Если графы 2-7 не заполнены, то они автоматически зануляются.
В графе 8 указываются коэффициенты надежности по нагрузке. С
помощью графы 8 выполняется переход от расчётных нагрузок к
нормативным. Если эти коэффициенты КН не заданы, то по
умолчанию они формируются следующим образом:
для постоянного загружения
KН=1.1;
для временного загружения
КН=1.2;
для особых воздействий
КН=1.0;
для кратковременных с малой длительностью KH=1.4.
В графе 9 указывается, какая часть нагрузки в долях от единицы в
данном загружении является длительно действующей. Если эта графа
29
не заполнена, то она формируется следующим образом:
для постоянно и длительно действующих загружений
для кратковременных загружений
для крановых
для прочих
K g =1;
K g =0.35;
K g =0.6;
K g =0;
Графы с 10 по 15 предназначены для записи коэффициентов, с
которыми усилия от каждого загружения входят в РСУ. Графа 10
предназначена для формирования 1-го основного сочетания нагрузок,
в котором учитываются усилия от всех постоянных, длительно
действующих и только от одного наиболее опасного временного
загружения или (при наличии номера в графе 2) от группы
объединенных временных загружений. В графу 11 заносятся
коэффициенты для формирования РСУ по 2-му основному сочетанию
нагрузок, а графу 12 - по особому сочетанию.
Если графы 10, 11, 12 не заполнены, то в них коэффициенты
формируются (по умолчанию) следующим образом:
графа 10 (первое основное сочетание): для всех видов
загружений, кроме особых, K1 =1 (для особых K1 =0);
графа 11 (второе основное сочетание): для постоянных
длительно
действующих
крановых и тормозных
K 2 =0.95;
для
кратковременных,
K 2 =0.9; для особых K 2 =0;
графа 12 (особое сочетание): для постоянных
длительно
K 2 =1,
действующих
K ос =0.8;
для
K ос =0.5; для крановых и тормозных K ос =0;
K ос =1; для прочих динамических K ос =0.
K ос =0.9;
для
кратковременных
для сейсмических
В практике возможны случаи, когда для разных элементов схемы
требуется применить разные коэффициенты сочетаний в одном и том
же загружении. Такие элементы объединяются в группы. Групп может
быть 2. Один и тот же элемент может входить в обе группы. Для этих
групп в документе 8 формируют дополнительные столбцы (с 13-го по
15-й) коэффициентов РСУ и заполняют строку 15 заглавного
документа, где указываются номера групп РСУ и номера элементов,
входящих в эти группы.
Пример:
Ном
ер
Вид
загр
загр
уже
Объ
уже
ния
еди
ния
Зна
нен
коп
ие
ере
вре
Вза
мен
имо
ные
ных
иск
Соп
люч
утст
аю
вую
щие
Коэ
щие
фф
Дол
ици
я
ент
дли
над
тел
ёже
ьно
ост
сти
и
Коэффициенты
расчётных сочетаний
30
1
2
3
4
5
6
7
8
9
10
11
12
(8/
0
1
2
2
2
2
3
3
4
4
5
5
2
0
0
1
1
1
1
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
1
1
1
1
4
0
0
0
0
1
1
2
2
0
0
0
0
5
0
0
0
0
0
0
0
0
0
0
0
0
6
0
0
0
0
0
0
9
9
0
0
0
0
7
0
0
0
0
0
0
10
10
0
0
0
0
8
9
1.1
1.3
1.4
1.4
1.2
1.2
1.2
1.2
1.2
1.2
1
1
1
1
0.5
0.5
0
0
0.5
0.5
0
0
0
0
10
1
1
1
1
1
1
1
1
1
1
1
1
11
12
1
0.9
0.9
0.9
0.9
0.9
0.9
0.9
0.9
0.9
0
0.9
1/
1/
0.8/
0.8/
0.8/
0.8/
0.8/
0.8/
0.8/
0.8/
1/
0.3/)
1–
основное
2–
основное
особое
1–
основное
2–
основное
особое
1
13
14
15
Здесь заполнен документ 8 для 12 загружений:
загружения 3-6 в первое основное сочетание могут войти в
любой (невыгодной) комбинации;
загружения 5 и 6, 7 и 8 - попарно взаимоисключающие;
загружения 9-12 знакопеременные;
загружения 9, 10 (тормозные) являются сопутcтвующими для
загружений 7 и 8;
в графе 8 записаны коэффициенты надежности по нагрузке;
в графе 9 записаны коэффициенты, определяющие долю
длительности в каждом загружеПример
нии;
в графах 10, 11, 12 Номер
Вид
загружения загружения
коэффициенты для первого
(8/
основного, второго основного и
1
0/
особого сочетаний.
2
1/
В
следующем
примере
3
1/
использован принцип умолчания. В
4
2/
такой
записи
документа
8
5
2/
подразумевается
отсутствие
6
2/
объединения временных загружений,
7
5/
отсутствие
знакопеременных,
8
5/)
взаимоисключающих
и
сопутствующих загружений. Так для
31
строки 5 имеем кратковременное загружение с коэффициентами
KН=1.2 в графе 8, K g =0.5 в графе 9, K1 =1 в графе 10, K 2 =0.9 в
графе 11 и K ос =0.5 в графе 12.
При использовании принципа умолчания все строки документа 8
необходимо обрывать на одной графе (как в примере – на первой
графе).
Для элементов, в которых подбираются РСУ, в документе 3
обязательно должны быть заданы либо размеры ядер сечений либо
идентификаторы Si с характеристиками.
1
2
3
4
5
6
(8/
0
1
1
2
2
5
0
0
0
0
0
0
3
0
0
0
1
1
2
4
0
1
1
0
0
0
0
0
0
0
0
0
6
0
0
0
0
0
0
7
0
0
0
0
0
0
8
9
1.1
1.4
1.3
1.2
1.1
1.5
1
0.8
0.7
0.5
0.5
0
10
1
1
0
1
0
0
11
1
1
0
1
0
0
13
14
12
0.9
1
1
0.5
0
1
1
0
1
0
1
0
1
0
0.5
0.7
0.4
0
особое
особое
2–
основное
Коэффициент
надёжеости
Доля
длительности
1–
основное
Сопутствующи
е
5
2–
основное
2
Коэффициенты
расчётных сочетаний
1–
основное
1
Взаимоисключающие
Номер
загружения
Вид
загружения
Объединение
временных
Знакоперемен
ные
Пример:
15
0.8/
0/
0.3/
0.1/
0.9/
0.8/)
В этом примере указаны две группы коэффициентов: в графах 1012 и 13-15. В этом случае может быть заполнена строка 15 заглавного
документа. Пусть схема содержит 25 элементов. Из них для первых 10
вычисляются РСУ по графам 10, 11, 12, а для элементов 8, 9 с 11 по
25 – по графам 13, 14, 15. Тогда строка 15 заглавного документа будет
выглядеть так: (0/ … /15; 1 2 3:1-10; 4 5 6:8 9 11-25/ … /).
2.11.1. Принципы построения РСУ
В общем случае напряженно-деформированного состояния
системы критерием для определения опасных РСУ служат
экстремумы упругого потенциала в какой-либо точке тела при
действии на него многих загружений. При этом учитываются
особенности, характерные для стержней, пластин, оболочек и
массивных тел. Эти особенности позволяют облегчить решение
задачи, существенно ограничив количество рассматриваемых РСУ.
32
2.11.1.1. Стержни
В качестве критерия определения РСУ здесь приняты
экстремальные значения нормальных и касательных напряжений в
контрольных точках сечения (рис.2.4).
Для нормальных напряжений
используется формула:
N My Mz
k
F Jy
Jz
,
(2.1)
где: k - точка сечения стержня
( k = 1 9).
Эта
формула
преобразуется
следующим образом при
b
h
y z
2
2
M
M
kF N y z ,
Я z ,i Я y ,i
Рис. 2.4. Сечение стержня c
характерными точками
где:
Я z ,i
и
Я y ,i
(2.2)
– ядровые расстояния в сечении стержня ( i =1, 2).
Такой подход позволяет определить экстремальные нормальные
напряжения в сечении любой формы. Для касательных напряжений
используется приближенная формула:
y,z F
Q y,z
2
M КР
.
2Я y1, z1 Я y2,z2
(2.3)
Формулы вычисления экстремальных значений напряжений для
каждой точки сечения приведены в табл.2.11.1, а нумерация
критериальных значений и соответствующих им напряжений – в табл.
2.11.2. В таблице 2.11.1 используется принятое правило знаков для
усилий.
Кроме напряжений вычисляются также экстремальные значения
продольной и перерезывающих сил.
Всего для сечения стержня отбирается 34 значения РСУ.
33
Таблица 2.11.1
Экстремальные значения напряжений
№ точки
сечения
1
2
3
4
5
6
7
8
Нормальные напряжения
Касательные напряжения сечения
MY M Z
Я Z 2 ЯY 2
M
M
F N Y Z
Я Z 2 ЯY 2
M
M
F N Y Z
Я Z1 ЯY 2
M
M
F N Y Z
Я Z1 ЯY 1
M
F N Z
ЯY 1
M
F N Z
ЯY 2
M
F N Y
ЯZ2
M
F N Y
Я Z1
F N
—
—
—
—
QZ
2
Q
F Z
2
Q
F Y
2
Q
F Y
2
F
M КР
2 Я Y 1 Я Y 2
M КР
2 Я Y 1 Я Y 2
M КР
2 Я Z 1 Я Z 2
M КР
2 Я Z 1 Я Z 2
Таблица 2.11.2
6. Критерии и их значения
№
критерия
Значение
№
критерия
Значение
1
2
3
4
5
6
7
8
9
10
1 +
1
2 +
2
3 +
3
4 +
4
7 +
7
11
12
13
14
15
16
17
18
19
20
8 +
8
5 +
5
6 +
6
N+
N
7 +
7
34
Продолжений таблицы 2.11.2
№
критерия
21
22
23
24
25
26
27
28
29
30
Значение
8 +
8
5 +
5
6 +
6
QY+,
N+
QY,
N+
QY+,
N
QY,
N
№
критерия
31
32
33
34
Значение
QZ+,
N+
QZ,
N+
QZ+,
N
QZ,
N
2.11.1.2. Плоское напряженное состояние
В общем случае главные напряжения в одной и той же точке
конструкции при различных загружениях имеют различную
ориентацию. Поэтому определение РСУ производится по огибающим
экстремальным кривым нормальных и касательных напряжений по
формулам:
k x cos 2 k z sin 2 k xz sin 2 k ;
(2.4)
1
2
k z x sin 2 k xz cos 2 k ,
(2.5)
Z1
z
a
x
A
xz
xz
x
a
X1
z
где
k - номер
загружения.
Обозначения
приведены на рис. 2.5.
Нормальные
напряжения вычисляются
в диапазоне от 90 до 90, а касательные - от
90 до 0. Шаг просмотра
5.
Рис. 2.5. Напряжения в плоском КЭ
2.11.1.3. Плиты
Здесь применяется подход, аналогичный тому, который описан в
п. 2.11.1.2. Изгибные и крутящий моменты в плите дают возможность
определить нормальные и касательные напряжения на верхней и
нижней поверхностях плиты. Эти напряжения по модулю равны,
поэтому формулы (2.4) и (2.5) приобретают вид:
35
M k M x cos2 k M y sin 2 k M xy sin 2 k ;
(2.6)
M c k 12 M y M x sin 2 k M xy cos 2 k .
(2.7)
2.11.1.4. Оболочки
Здесь также применяется аналогичный подход. Однако
вычисляются напряжения на верхней и нижней поверхностях оболочки
с учетом мембранных напряжений и изгибающих усилий по
следующим зависимостям:
н
xв x
н
yв y
н
в
xy
6M x
h2
6M y
2
,
(2.8)
h
6 M xy
h2
где: h - толщина оболочки;
В и Н — индексы, означающие принадлежность к верхней и
нижней поверхностям. Шаг просмотра угла = 10°.
2.11.1.5. Объёмные элементы
Критерием для определения опасных сочетаний напряжений в
общем случае НДС приняты экстремальные значения среднего
напряжения (гидростатического давления) и главных напряжений
девиатора. Определяются углы наклона главных напряжений в
каждом элементе для каждого загружения. Вычисление производится
по формулам:
ф x l 2 y m 2 z n 2 2 xy l m 2 xz l n 2 yz mn;
ф 0 Sф;
S x x 1 31l 2 ; S y y 1 3m1 2 ; S z z 1 31n2 ;
Sф S x l 2 S y m 2 S z n 2 2 xy lm 2 xz l n 2 yz mn ,
где
ф
- нормальное напряжение на площадке с направляющими
косинусами l, т, n к осям X1, Y1, Z1;
Sф - нормальное напряжение девиатора на этой же площадке;
36
0 x y z / 3
- среднее напряжение.
Процесс выбора организован следующим образом. Для данного
элемента вычисляются направляющие косинусы главных площадок по
всем загружениям. Если в схеме задано n загружений, то будет
найдено Зn площадок. Затем вычисляются напряжения Sф на этих
площадках от всех загружений и производится накопление
положительных и отрицательных значений напряжений.
В соответствии с этим принято обозначение критериев как
трехзначных чисел. Первые две цифры обозначают порядковый
номер загружения, на площадках которого вычисляются напряжения
от всех загружений. Третья цифра может принимать значения от 1 до
6, которым придается следующий смысл:
1 - положительное суммарное значение напряжения на 1-ой
главной площадке;
2 - отрицательное суммарное значение напряжения на 1-ой
главной площадке;
3 и 4- то же на 2-ой главной площадке;
5 и 6- то же на 3-ей главной площадке.
Так, например, критерий 143 означает, что на 2-ой главной
площадке 14-го загружения получено наибольшее положительное
значение напряжения. Критерий 76 означает, что на 3-й главной
площадке 7-го загружения получено наибольшее отрицательное
значение напряжения.
Критерии, соответствующие наибольшему и наименьшему
значениям среднего напряжения, обозначаются цифрами 7 и 8
соответственно.
2.12. Документ 15 "Организация расчёта
на динамические воздействия"
В строках этого документа задаются характеристики каждого
конкретного динамического загружения. Каждый вид динамического
загружения имеет свои особенности. Общие сведения по оформлению
документа 15 приведены в табл. 2.12.1.
Для организации расчёта на динамические воздействия
необходимо заполнить строку 35 документа 0.
Запись имеет следующий вид:
(0/…/ 35; NS15: NZ1 NZ2...NZn/ … /),
где NZi - номера загружений;
NS15 - номер строки документа 15, где заказан модальный
анализ.
При этом в документах 6 и 7 должны быть заданы веса масс,
которые участвуют в загружении.
37
Таблица 2.12.1
Сводная таблица параметров для динамических расчётов
1
Прочие параметры
KF
NST
SPR
PRP
MOD
Наименовани
е
воздействия
Инвариантные
параметры
2
3
4
5
6
7
8
9
10 11 12 13 14 15 16 17 18 19
Сейсмические 20 + 0 + + KS PH H TIP G
S
Пульсационн
21 + + + + KS PH H HZ WR A
ые
Импульсивно
22 + 0 + +
е
Ударное
23 + 0 + +
Гармоническо
24 + 0 + +
е
Модальный
100 +
анализ
K1 K 2 K 3 K E CX CY CZ
B TM TZ
DCR COR
2.12.1. Расчёт на сейсмическое воздействие
6.
7.
8.
9.
Z
Z
Z
PH = 1
M
Y
Y
0.0
0.0
Z
Z
PH = 2Y
M
Y
M
PH = 3
Z
M
Y
Y
M
M
X
H=0
X
H 380
X 0.0
X
H
5.
H
1.
2.
3.
4.
Последовательно задаётся следующая информация:
MOD=20 – номер модуля из библиотеки динамических модулей;
KF - количество учитываемых форм колебаний;
NST=0 – номер соответствующего статического загружения;
SPR – признак решения собственной проблемы: 0 - не решать, 1 решать;
PRP – признак печати результатов динамического расчёта; PRP=1
- печатаются формы собственных колебаний; 2 - инерционные
силы; 3 - формы и силы; периоды собственных колебаний
печатаются всегда;
KS – поправочный коэффициент для сейсмических сил (как
правило, равен 1);
РН – признак ориентации высоты сооружения в соответствии с
рисунком 2.6.
Н – расстояние между дневной поверхностью земли и нулем
расчётной схемы (см. рис. 2.7), м;
TIP – тип сооружения:
Рис. 2.6. Признак PH (М - точечные массы)
Рис. 2.7. Параметр H (м)
X
H 0
X
1 - жилые, общественные и производственные;
2 - транспортные;
3 - гидротехнические;
4 - мостовые;
10. G – категория грунта в соответствии с [4] G={1, 2, 3};
11. S – сейсмичность площади в баллах (7, 8, 9);
12. K1 – номер позиции
[4, табл.3], K1 ={1, 2, 3};
13. K 2 – номер позиции
14. K 3 – номер позиции
15. K – номер позиции
[4, табл.4], K 2 ={1 … 8};
[4, табл.5], K 3 ={1 … 5};
[4, табл.6], K ={1 … 4};
16. Е – количество этажей в сооружении;
17, 18, 19. → СХ, CY,CZ – направляющие косинусы
равнодействующей сейсмического воздействия по отношению к
общей системе координат. 0 ≤ {СХ, CY, CZ} ≤ 1; СХ2 + CY2 + CZ2 =1.
Если одно из этих чисел равно нулю, то по соответствующему
направлению колебания не учитываются.
При заполнении исходных данных рекомендуется учитывать
следующее:
для TIP=3 значения K1 , K 2 , K можно задавать любыми
числами;
для TIP={1, 2, 4} и K1 ={1, 3}, значение Е может быть любым
обычно рекомендуется задавать Е ≥ 5.
2.12.2. Расчёт на ветровое воздействие с учетом пульсаций
3
Z
Y
2
HZ
1
X
Рис. 2.8 Параметр HZ (м)
1. MOD=21;
2. KF – количество учитываемых
форм;
3. NST – номер статического
ветрового
загружения
из
документа 6;
4. SPR
–
признак
решения
собственной проблемы;
5. PRP – признак печати;
6. KS – поправочный коэффициент
(как правило, KS=1);
7. РН – см. рис. 2.6;
8. Н – см. рис. 2.7;
9. HZ
–
отметка
координаты
нулевого уровня сооружения в
соответствии с рис. 2.8;
39
10. WR – ветровой район строительства [5, табл. 5] (для района 1а
задаётся WR=0);
11. А – ширина здания по фронту обдуваемости поверхности, м;
12. В – длина здания вдоль действия ветра, м;
13. ТМ – тип местности по [5, п.6.5]: 1 – А; 2 – В; 3 – С.
14. TZ – тип здания; для любого типа здания TZ = 0; для зданий с
постоянными по высоте жесткостью, массой и шириной
наветренной грани TZ=1;
15. DCR – логарифмический декремент колебаний:
DCR=0.3 - для железобетонных и каменных сооружений;
DCR=0.15 - для стальных башен мачт.
16. COR – признак ориентации обдуваемой поверхности в расчётной
схеме при направлении ветра вдоль оси Х (на плоскость YOZ)
COR=1; при направлении ветра вдоль оси Y (на плоскость XOZ)
COR=2. Ветровое статическое загружение (с номером NST)
задается всегда, как расчётное и может быть описано в
документах 6 и 7 как распределенным, так и узловым по [5,
формуле (6)] с учетом коэффициента надежности по нагрузке.
Задание NST=0 не допускается.
2.12.3. Исходные данные для расчёта
на импульсивное воздействие
1.
2.
3.
4.
5.
6.
MOD=22;
KF – количество учитываемых форм;
NST=0;
SPR – признак решения собственной проблемы (см. п.2.12.1);
PRP – признак печати (см. п. 2.12.1);
– коэффициент неупругого сопротивления материала
(коэффициент внутреннего трения). Для металла =0.2; для
бетона =0.1 При =0 расчёт выполняется без учёта поглощения
энергии.
2.12.4. Исходные данные для расчёта на ударное воздействие
В этом случае задается MOD=23. Остальные величины задаются
аналогично п. 2.12.3.
2.12.5. Исходные данные для расчёта
на гармонические колебания
1. MOD=24;
2. KF – количество учитываемых форм;
3. NST=0;
40
4. SPR – признак решения собственной проблемы;
5. PRP – признак печати:
6. – коэффициент (см. п.2.12.3). Здесь ≠0;
7. – вынужденная частота внешнего воздействия (рад/сек).
2.12.6. Пример оформления расчёта
на динамические воздействия
(0/… /35; 1:10; 2:12 13; 3:14; 4:15; 5: 11/... /)
Эта запись означает, что строка 1 документа 15 распространяется
на загружение 10, строка 2 - на загружения 12 и 13 и т.д.
При этом документ 15 имеет вид:
(15/21 3 7 1 3 1 3 5.1 2.3 0 12 18 1 0 0.3 2/
20 5 0 1 3 1 5.1 1 2 7 1 2 1 3 9 0.7071 0.7071 0/
22 3 0 0 3 0.2/
23 3 0 0 3 0.2/
24 3 0 0 3 0.2 40/)
В первой строке задана информация для расчёта на ветровую
нагрузку с учетом пульсации (модуль 21). Заказано 3 формы
колебаний, номер статического ветрового загружения - 7; необходимо
решить собственную проблему и напечатать все результаты работы
модуля. Указана ориентация высоты сооружения вдоль оси Z общей
системы координат. Расстояние между дневной поверхностью земли и
началом координат - 5.1 м; нулевой уровень сооружения поднят на 2.3
м от начала координат; ветровой район - 1а, ширина здания по фронту
обдуваемой поверхности - 12 м, длина здания вдоль действия ветра 18 м, тип местности - А; тип здания - любой, декремент колебаний 0.3, ветер направлен вдоль оси Y общей системы координат.
Во второй строке описана информация для расчёта на
сейсмическое воздействие. Первые восемь параметров не требуют
пояснений вследствие аналогии с предыдущим модулем. Далее
указываются: тип сооружения - жилое здание, категория грунта - 2,
сейсмичность площадки - 7 баллов, позиция 1 [4, табл.3], позиция 2 [4,
табл.4], позиция 1 [4, табл.5] и позиция 3 [4, табл.6]; количество
этажей - 9, сейсмическая нагрузка учитывается вдоль осей Х и Y
общей системы координат (CZ=0).
В следующих строках первых пять параметров не нуждаются в
расшифровке. Следует лишь обратить внимание на то, что в них
записан отказ от решения собственной проблемы. Такая запись
возможна, если распределение масс на схеме в предшествующем
загружении такое же, как и в последующих загружениях. Далее, в этих
трёх строках задаётся коэффициент неупругого сопротивления
материала - 0.2. В последней строке задаётся еще вынужденная
частота внешнего воздействия - 40 рад/сек.
41
2.12.7. Особенности задания инерционных масс и воздействий
в документах 6 и 7
Допускаются следующие 3 способа задания весов масс.
Первый из них реализует задание распределенных весов масс и
автоматическое распределение их в узлах расчётной схемы. В
документе 6 задаётся следующая информация:
(6/… /NЭ 4 0 NСТР7 NZ/... /), где
NЭ - порядковый номер элемента (по документу 1);
4 - код автоматического распределения нагрузки по линейным
координатам X, Y, Z в узлы данного элемента;
0 - признак распределённого веса массы;
NСТР7 - номер строки документа 7, где находится величина
распределённого на элемент веса массы;
NZ - номер загружения.
Вид строки документа 7:
(7/... / NСТР7 q/... /), где
q - интенсивность нагрузки, размерность которой соответствует
типу конечного элемента. Для стержней это F/L, для
плоскостных конечных элементов - F/L2, для объемных - F/L3,
где F - единица измерения силы; L - единица измерения длины.
Второй способ является традиционным. Здесь необходимо
самостоятельно назначать узлы схемы, в которые будут приложены
нагрузки, осуществлять их сбор самостоятельно и задавать
направление их действия. Нагрузки записываются по правилам
заполнения узловых нагрузок (пп. 2.9, 2.10).
Примечание:
Если для расчёта на импульсивное, ударное или гармоническое
воздействия используется традиционный способ задания весов масс,
то обязателен следующий порядок задания информации: - в
документе 6 сперва описываются узлы, в которые будут введены веса
масс, а в документе 7 после величины веса массы необходимо задать
0. Затем в документе 6 следуют строки, описывающие собственно
упомянутые воздействия. Если в этих (последних) строках вес массы
не равен нулю, то он учитывается как присоединённый.
Третий способ – формирование динамического загружения из
статического, с автоматизированным распределением весов масс.
Следует учесть, что инерционные массы будут сформированы только
из местных нагрузок статического загружения, направленных вдоль
оси Z.
(6/ … /NSZ 4 3 NСТР7 NZ/ ... /),
где NSZ - номер статического загружения;
4 3 - код преобразования загружения;
NZ - номер динамического загружения;
42
NСТР7 - номер строки документа 7, где задаётся поправочный
коэффициент преобразования.
Возможно применения всех способов в одном загружении.
Для
воздействий
ударной,
импульсивной,
вибрационной
нагрузками в документе 6 необходимо указать ещё направление этих
нагрузок и узлы, в которые они приложены, а в документе 7 некоторые
их характеристики.
Задание строк документа 7 при расчёте на импульсивную и
ударную нагрузки производится следующим образом:
(7/ ... / NСТР7 Q P f /0 T0 n/ … /),
где Q - вес массы, приходящей в узел. Задаётся Q=0, если
используется автоматизированное распределение масс. Q≠0,
если применяется третий способ задания нагрузок или
вносятся
коррективы
в
какой
лило
узел
при
автоматизированном распределении масс;
P - величина силы импульса или удара (тонны), усреднённая в
зависимости от формы;
f - номер формы импульса (табл. 2.12.2);
- продолжительность действия импульсивного или ударного
воздействия (сек);
Т0 - период повторения действия импульсивного или ударного
воздействия (сек);
n - количество повторений.
При расчёте на гармонические воздействия:
(7/... / NСТР7 Q P SC /… /),
где Q - задаётся аналогично импульсному воздействию;
P - амплитуда внешнего гармонического воздействия в данном
узле (тонны);
SC - признак, указывающий закон действия гармонического
воздействия: задаётся 1 - по закону косинуса, 2 - по закону
синуса;
- сдвиг фазы (радианы).
Таблица 2.12.2
Форма импульсивных или ударных воздействий
1
Форма
импульса
или
удара
f( )
2
3
f( )
f( )
1
1
4
f( )
1
1
5
6
f( )
f( )
1
1
Если в пределах одного задания на расчёт требуется произвести
расчёт на несколько разнородных динамических загружений, и при
43
этом величины масс в них и порядок их описания остаются
постоянными, то решение собственной проблемы достаточно
произвести только для первого из этих загружений, так как периоды и
формы собственных колебаний будут аналогичными для оставшихся
загружений.
Знаки величин нагрузок обычно положительны. Для удара и
импульса они могут быть отрицательными.
2.12.8. Примеры заполнения документов 6 и 7
Пример расчёта на ветровое и сейсмическое воздействия:
(6/ ... /10 4 0 5 12/R 1 3/1/2 4 3 8 12/22 0 3 7 12/ … /)
(7/ ... /5 0.75/6 5.7 2.4/7 13.8/8 0.9/ ... /)
В данном примере для загружения 12 в соответствующих узлах
расчётной схемы будут сформированы инерционные массы,
обладающие тремя линейными степенями свободы; эти массы
образованы от:
распределенной на элементы с 10 по 13 равномерно
распределённой нагрузки интенсивностью 0.75 т/пм;
всех местных нагрузок, величины которых умножены на
коэффициент 0.9.
Последняя
строка
документа
6
добавляет
массу
от
сосредоточенного веса в узле 22 величиной 13.8 т, но этой массе
разрешается колебаться только в направлении Z (направлении 3)
общей системы координат. Для того, чтобы разрешить степени
свободы 1 и 2, необходимо дописать в документ 6 еще две строки:
22 0 1 7 12/22 0 2 7 12/.
В решении собственной проблемы (в определении периодов и
форм собственных колебаний) будут участвовать только те массы,
которые описаны в загружении 12.
Пример расчёта на импульсивные, ударное и гармоническое
воздействия:
(6/ ... /10 4 0 5 12/R 1 3/1/2 4 3 10 12/
22 0 3 7 12/13 0 2 8 12/15 0 2 9 12/)
(7/ … /5 0.75/6 5.7 2.4/7 13.8/8 23.1 5.2 6 0.9/0 2.1 4/
9 0 5.2 6 0.9/0 2.1 4/10 0.9./… /)
В отличие от предыдущего примера здесь в узлы 13 и 15
(последние две 2 строки документа 6) приложена импульсивная
нагрузка, причём к весу массы, приходящейся в узел 13, добавится
масса от 23.1 т (Строка 8 документа 7) и решение собственной
проблемы произойдёт, исходя из новых условий. Далее, в узлы 13 и
15 приходится импульс от силы в 5.2 т продолжительностью 0.9 сек,
период повторения задан 2.1 сек при числе повторений 4.
2.13. Сокращение объёма исходной информации
44
Сокращение исходной информации осуществляется за счет
применения признаков повторений (имеющих разную структуру в
заглавном документе и в остальных документах исходных данных) и
использования специальных систем координат.
Сокращение объема информации в строках документа 0
производится следующим образом. Если номера элементов (или
узлов) в строке документа описываются подряд, то применима запись
вида 1 -N (т.е. с 1-го по N-й).
Номера элементов (узлов) 1, 2, ..., N могут быть описаны с шагом
повторения R. Например: запись: 1 R 17 4 означает перечисление
элементов с 1-го по 17-й с шагом 4 и аналогична записи - 1 5 9 13 17.
Повтор относится к одному числу, стоящему перед символом - R.
В документах с 1-го по 7-й используется оператор повторений,
размещаемый в двух строках:
R N1 N2 N3/ К1 К2 К3 К4, и т.д. по числу граф документов.
Первая строка начинается с символа R, за которым (через
пробелы) следует 3 целых числа:
N1 – число повторяемых строк;
N2 – количество повторений;
N3 – номер строки, от которой отсчитывается число повторяемых
строк.
Число N3 может отсутствовать. В этом случае повторяются строки,
непосредственно предшествующие оператору повторения.
Во второй строке указываются шаги повторений, которые для
каждой графы могут быть различными как по величине, так и по знаку:
К1 – шаг, с которым меняется 1-я графа,
К2 – шаг, с которым меняется 2-я графа и т.д.
Например, запись в документе 1: - 11 2 5 6 19 20/R 1 3/0 0 1 2 -1 -1/,
означает, что задана информация о четырех элементах:
11 2 5 6 19 20/11 2 6 8 18 19/11 2 7 10 17 I8/11 2 8 12 16 17/.
Операторы повторений могут следовать один за другим. При этом
порядковый номер строки и число строк, отсчитываемых операторами
повторений, определяются для документа в развёрнутом виде (с
учетом предыдущих повторений).
Например, для плиты (см. рис. 7.4.2).
Заполнение документа 1:
(1/11 1 1 2 8 9/R 1 5/0 0 1 1 1 1/R 6 4/0 0 7 7 7 7/)
Заполнение документа 4:
(4/0/R 1 6/1/R 7 5/0 0.5/)
Заполнение
документа
6
при
действии
равномерно
распределённой вертикальной нагрузки на всю плиту (величина
нагрузки указана в строке 1 документа 7, загружение 1): (6/1 6 3 1 1/R 1
29/1/).
45
В документе 5 при объединении перемещений, например по
направлению 5 узлов с 4 по 39 в середине плиты: (5/4 5/11/R 1 4/7/…
/).
Для конечных элементов, описываемых в документе 1 двумя
строками, также применим оператор повторения.
В записи: - (1/31 9 2 3 28 29/0 0 34 35 84 85/R 2 5/0 0 1 1 1 1/)
описаны 6 элементов типа 31.
Возможно повторение строк, содержащих буквенную информацию.
В этом случае в соответствующей графе проставляется шаг
повторения – ноль.
3. БИБЛИОТЕКА КОНЕЧНЫХ ЭЛЕМЕНТОВ
Библиотека
конечных
элементов
содержит
элементы,
позволяющие производить статический и динамический анализ
конструкций, состоящих из разнородных конечных элементов. Состав
библиотеки приведен в табл. 3.1.1.
Таблица 3.1.1
Список конечных элементов
№
Наименование КЭ
КЭ
1
2
ПриПлоскость
знак
Степени
располож
схем
свободы
ения
ы
3
4
5
Комментарий
6
1
7. Стержень плоской фермы
1
X0Z
X,Z
Частный
КЭ-10
случай
2
8. Стержень плоской рамы
2
X0Z
X,Z,UY
Частный
КЭ-10
случай
46
3
Стержень
ростверка
балочного
3
X0Y
Z,UX,UY Частный
КЭ-10
случай
продолжение таблицы 3.1.1
1
2
3
4
5
4
Стержень пространственной
фермы
4
Произвольно
X,Y,Z
5
Пространственный стержень
5
6
Пространственный стержень
с учётом сдвига
5
47
6
Частный
КЭ-10
случай
Произвольно
X,Y,Z,UX, Частный
UY,UZ КЭ-10
случай
Произвольно
X,Y,Z,UX, Частный
UY,UZ КЭ-10
случай
1
2
10 9. Универсальный стержень
3
4
5
6
X0Z
X,Z
1. Допускается
X0Z
X,Z,UY, наличие упругого
X0Y
Z,UX,UY основания
в
произволь X.Y.Z
двух плоскостях.
но
X,Y,Z,UX, 2. Предусмотрен
UY,UZ
учет
сдвиговой
жесткости
и
обжатия.
1
2
3
4
5
продолжение таблицы 3.1.1
1
2
3
4
3, 5
X0Y
Z,UX,UY 1. Допускается
наличие упругого
основания.
2. Учитываются
свойства
материала:
изотропия;
ортотропия;
анизотропия.
12 Универсальный треугольный 3, 5
КЭ плиты
X0Y
Z,UX,UY
11 Универсальный
прямоугольный КЭ плиты
48
5
6
1
2
3
4
21 Универсальный прямоуголь- 1,2,5
X0Z
(23) ный КЭ плоской задачи (4,5) Произвол
теории упругости
ьно
22 Универсальный треугольный 1,2,5
X0Z
(24) КЭ плоской задачи теории (4,5) Произвол
упругости
ьно
5
6
X,Z
1.
Допускаютс
(X,Y,Z)
я
следующие
виды
плоской
задачи
теории
упругости:
плоское
напряженное
состояние;
плоская
деформация.
2.
Учитываютс
я
свойства
материала:
X,Z
(X,Y,Z) изотропия;
трансверсальн
ая изотропия;
ортотропия;
анизотропия.
продолжение таблицы 3.1.1
1
2
3
4
5
6
Учитываются
свойства
материала:
изотропия;
трансверсальн
ая изотропия;
ортотропия;
анизотропия.
Возможен учёт
биматериальности
(конструктивная
ортотропия).
31 Параллелепипед
4, 5 Произвол
ьно
X,Y,Z
32 Тетраэдр
4, 5 Произвол
ьно
X,Y,Z
49
33 Трёхгранная призма
36 Универсальный
пространственный
изопараметрический
восьмиузловой КЭ
4, 5 Произвол
ьно
X,Y,Z
Произвол 9.01 X,Y,Z
ьно
5
продолжение таблицы 3.1.1
1
2
3
41 Универсальный
прямоугольный КЭ оболочки
5
42 Универсальный треугольный
КЭ оболочки
5
4
5
6
Произвол X,Y,Z,UX, 1. Допускается
ьно
UY,UZ
наличие упругого
основания.
2.
Учитываютс
я
свойства
материала:
изотропия;
трансверсальн
ая изотропия;
ортотропия;
анизотропия.
Учёт
Произвол X,Y,Z,UX, биматериальности
ьно
UY,UZ (конструктивная
ортотропия).
50
1
2
44 Универсальный
четырёхугольный
оболочки
3
КЭ
51 10. Связь конечной
жесткости
4
5
6
4, 5 Произвол X,Y,Z,UX,
ьно
UY,UZ
Произвол X,Y,Z,UX, Применяется для
ьно
UY,UZ учёта податливости опорной связи.
5
продолжение таблицы 3.1.1
1
2
3
4
55 Упругая связь между узлами
1-5
154 Нуль-элемент
1-5
51
5
6
Вдоль X,Y,Z,UX, Учёт
податливоосей
UY,UZ сти стыка констглобально
рукций.
й системы
координат
Произвольно
X,Y,Z
Применяется для
расчёта
на
заданное
перемещение,
а
также
для
наложения связей
непараллельных
глобальной
системе координат
1
2
200 Пустой элемент
3
4
1-5
Произвольно
5
6
Применяется для
удаления
элемента
из
расчётной схемы
без
нарушения
регулярности
её
кодирования.
3.1. Универсальный стержень. Конечный элемент 10
3.1.1. Общее описание
Универсальный стержень имеет местную систему координат
X1,Y1,Z1, относительно которой определяются усилия, и задаётся
местная нагрузка. Ось X1 направлена по продольной оси стержня от
начала (первый узел по документу 1) к концу (второй узел). Ось Z1
всегда направлена в верхнее полупрострaнство. Оси Y1 и Z1 являются
главными центральными осями сечения стержня. Конечный элемент
может работать со всеми признаками систем. Следует рационально
выбирать признак системы в соответствии с типом стержневой
процедуры (идентификатором поля дополнительных характеристик
документа 3 – KE), применяемым в конкретной задаче. Соответствие
признаков системы и типа стержневой процедуры приведено в табл.
3.1.3. Если признак системы опущен, то по умолчанию принимается
признак, заданный в рассматриваемой задаче.
3.1.2. Особенности задания исходной информации
Конечный элемент универсального стержня предполагает задание
жесткостных характеристик в следующих вариантах:
1. Жесткостные
характеристики
задаются
с
помощью
идентификатора Si и вычисляются автоматически (табл.3.1.2);
2. Численные жесткостные характеристики задаются в порядке:
EF - продольная жесткость (т);
ElY - изгибная жесткость относительно оси Y1 (тм2);
ElZ - изгибная жесткость относительно оси Z1 (тм2);
GIK -крутильная жесткость (тм2);
GFY - сдвиговая жесткость относительно оси Y (т);
GFZ - сдвиговая жесткость относительно оси Z (т);
- в соответствии с типом стержневой процедуры (см.табл. 3.1.2).
Для учета упругого основания после идентификаторов CY или CZ
указываются соответствующие характеристики:
... CY h C1Y С2Y ...
... CZ b C1Z C2Z …
52
где: h - высота сечения
стержня;
C1Y
Винклеровский
Тип
Перечень задаваемых
коэффициент
постели
в
стержневой
жесткостей
направлении оси Y1;
процедуры
С2Y
Пастернаковский
1
EF
коэффициент
постели
в
2
EF ElY
3
ElY GIK CY CZ
направлении оси Y1;
4
EF
b
ширина
сечения
5
EF ElY ElZ GIK GFY GFZ
стержня (м);
C1Z
Винклеровский
коэффициент постели в направлении оси Z1:
C2Z - Пастернаковский коэффициент постели в направлении оси Z1.
Как правило, при учёте упругого основания используется только
идентификатор CZ. С помощью характеристик, стоящих под
идентификатором CY, производится учёт бокового влияния грунта.
Учет сдвига производится в 2, 3, 5, 10 типах стержневых процедур
при задании идентификатора GF после описания жесткостных
характеристик. Для задания обжатия (предварительного напряжения)
используется идентификатор N со следующим за ним одним
числовым параметром - величиной силы обжатия. При этом для
второго и третьего типов стержневых процедур, помимо задания
отмеченных в табл. 3.1.2 жесткостей, необходимо задавать сдвиговую
жесткость относительно оси Y1 (GFY).
Для
задания
коэффициента
Пуассона
используется
идентификатор NU. По умолчанию этот коэффициент принимается
равным 0.2.
Идентификатор КЕ используется при задании типа стержневой
процедуры. Параметр описан в табл. 3.1.3 и может принимать
значения от 1 до 5. Если KE=0, то тип стержневой процедуры
принимается в соответствии с признаком системы задачи.
Таблица 3.1.3
Таблица 3.1.2
Описание параметра КЕ
Признак
системы
(0/… /2;1…
(0/… /2;2…
(0/… /2;3…
Плоскость Номера
Тип
Перемещения в узле,
расположе степене
стержневой Примечани
соответствующие
ния
й
процедуры (3
е
степеням свободы
элемента свободы
документ)
X0Z
1, 3
Линейные
(3/… KE 1 … Плоская
перемещения по осям
ферма
XиZ
X0Z
1, 3, 5 Линейные
(3/… KE 2 … Плоская
перемещения по осям
рамная
X и Z, угол поворота
система
относительно Y
X0Y
3, 4, 5 Линейное
(3/… KE 3 … Балочный
перемещение по оси
ростверк
53
(0/… /2;4…
Произвольно
(0/… /2;5…
Произвольно
Z,
угловые
перемещения
относительно осей X
иY
1, 2, 3 Линейные
(3/… KE 4 …
перемещения по осям
X, Y, Z
1, 2, 3, Линейные
(3/… KE 5 …
4, 5, 6 перемещения по осям
X, Y, Z угловые
перемещения
относительно осей X,
Y, Z
Пространст
-венная
ферма
Пространст
венная
система
общего
вида
3.1.3. Нагрузки на стержневые элементы
Стержневые конечные элементы допускает местные нагрузки,
приведенные в табл 3.1.4.
(a) Таблица 3.1.4
Нагрузки на стержневые КЭ
Схема приложения нагрузки
10.02 Величина нагрузки, её привязка
1
10.03 Вид
нагрузки
10.04 2
Температурная нагрузка
1 - t (градусы);
Тип стержневой Допустимые
процедуры
направления
(документ 3)
нагрузки
3
8
t в , t н , h (м);
6 - t в , t н , b (м)
5-
1
2
3
4
5
4
1
1, 5
5
1
1, 5, 6
продолжение таблицы 3.1.4.
1
10.05 2
Сосредоточенная сила
5
15
Z
Y
Pz
Py
Px
1
а
3
2 X
P (т), а (м)
54
1
2
3
4
5
4
1, 3
1, 3
3
1, 2, 3
1, 2, 3
Сосредоточенный момент
5
15
1
2
3
4
5
5
5
4, 5
5, 6
4, 5, 6
6
16
1
2
3
4
5
1, 3
1, 3
3
1, 2, 3
1, 2, 3
7
17
1
2
3
4
5
1, 3
1, 3
3
2, 3
2, 3
Z
Y
Pz
Py
Px
1
2 X
а
М (тм), а (м)
Равномерно
распределённая
нагрузка вдоль осей
q (т/м)
Трапециевидная нагрузка
q
Z1
Y1
q
1
2
1
X1
а
2
b
q1 (т/м), а (м), q2 (т/м), b (м)
3.2. Универсальные КЭ для расчета балок-стенок,
тонких плит и пологих оболочек
3.2.1. Назначение конечных элементов
Данные КЭ предназначены для решения плоской задачи теории
упругости (плоское напряженное состояние и плоская деформация), а
также прочностного расчета тонких (5 ≤ Lmin / ≤ 80, Lmin наименьший из генеральных размеров в плане; - толщина), жестких
(наибольший прогиб не превышает /5) пластин и тонких ( R / ≥ 20,
R -минимальный радиус кривизны срединной поверхности) пологих
55
( Lmin / f 0 ≥ 5, f 0 - стрела подъёма свода) оболочек из однородного по
толщине элемента анизотропного линеино-упругого материала.
При этом возможно рассмотрение одного из следующих случаев
упругой симметрии:
полная симметрия (изотропное тело);
три плоскости упругой симметрии (ортотропно анизотропное или
ортотропное тело);
одна плоскость упругой симметрии, параллельная координатной
плоскости (анизотропное тело).
3.2.2. Описание универсального прямоугольного КЭ плиты
(тип КЭ - 11)
КЭ предназначен для прочностного расчёта тонких прямоугольных
в плане плит. На рис.3.1 представлены схематическое изображение
КЭ и последовательность нумерации его узлов.
Каждый из узлов КЭ имеет три степени свободы:
W
вертикальное
перемещение,
Y
1
положительное
Z1
направление
которого
совпадает
с
uy
направлением оси 0Z
(0Z1);
4
3
W
UX - угол поворота
относительно оси 0X1
положительное
u x X1
направление
которого
противоположно
1
2
направлению вращения
Рис. 3.1. Схематическое изображение КЭ 11
часовой стрелки, если
смотреть с конца оси 0Х1;
UY - угол поворота относительно оси 0Y1, положительное
направление которого противоположно направлению вращения
часовой стрелки, если смотреть с конца оси 0Y1.
3.2.3. Общее описание универсального прямоугольного КЭ
плоской задачи теории упругости (тип КЭ – 21, 23)
Z1
Z
Данный КЭ предназначен для
прочностного
расчета
прямоугольных
пластин,
нагруженных в своей плоскости
(плоскость X10Z1). Конечный
Y1
W
V
4
1
3
2
Y
X
U
X1
56
Рис.3.2. Схематическое изображение
КЭ 21, 23
элемент
позволяет
рассмотреть
два
случая
напряженнодеформированного состояния – плоскую деформацию и плоское
напряженное состояние, у которых основные соотношения отличаются
лишь упругими константами.
На рис. 3.2 представлены схематическое изображение КЭ и
последовательность нумерации его узлов.
Узлы конечного элемента имеют следующие степени свободы для:
КЭ-21 – U - линейное перемещение по оси X1; W - линейное
перемещение по оси Z1;
КЭ-23 – U - линейное перемещение по оси X; W - линейное
перемещение по оси Z; V - линейное перемещение по оси Y.
Положительное направление перемещения совпадает с направлением оси.
Для случая плоской деформации, кроме напряжений NX ( x ), NZ
( z ), ТXZ ( xz ), действующих в плоскости элемента, на печать
выдается нормальное напряжение NY ( y ), действующее в
направлении ортогональном плоскости КЭ.
КЭ - 23 – может располагаться произвольно по отношению к
плоскостям X0Z, Y0Z, X0Y общей системы координат.
3.2.4. Описание универсального прямоугольного
плоского КЭ оболочки (тип КЭ - 41)
Данный КЭ предназначен для прочностного расчета тонких
прямоугольных
в
плане
пологих оболочек (плит,
балок-стенок).
Z1
На рис. 3.3 представлены
Y1
схематическое изображение
КЭ и последовательность
uy
uz
нумерации его узлов.
V
В каждом из узлов КЭ
4
3
имеется по шесть степеней
W
свободы:
U
горизонтальное
X1
перемещение,
U
положительное
ux
1
2
направление
которого
Рис.3.3. Схематическое
совпадает
с
наизображение КЭ 41
правлением 0Х1;
V
горизонтальное
57
перемещение, положительное направление которого совпадает с
направлением 0Y1;
W - вертикальное перемещение, положительное направление
которого совпадает с направлением оси 0Z1;
UX - угол поворота относительно оси 0Х1, положительное
направление которого противоположно направлению вращения
часовой стрелки, если смотреть с конца оси 0Х1 .
UY - угол поворота относительно оси 0Y1, положительное
направление которого противоположно направлению вращения
часовой стрелки, если смотреть с конца оси 0Y1 .
UZ - угол поворота относительно оси 0Z общей системы координат.
Степени свободы U, V отвечают мембранным, a W, UX, UY изгибным деформациям. Угол поворота UZ не входит в число узловых
параметров, определяющих деформации элемента, и в местной
системе координат ранен нулю. Эта степень свободы появляется при
стыковке элементов, не лежащих в одной плоскости, и необходима
для учета пространственной работы конструкции.
Для случая плоской деформации, кроме напряжений - NX ( x ), NY
( y ), ТXY ( xy ), действующих в плоскости элемента, на печать
выдаётся нормальное напряжение NZ
направлении ортогональном плоскости КЭ.
( z ),
действующее
в
3.2.5. Общее описание универсального четырехугольного
плоского КЭ оболочки (тип КЭ - 44)
Данный КЭ предназначен для прочностного расчета тонких
криволинейного очертания пологих оболочек (плит, балок-стенок). В
каждом из узлов КЭ имеется по шесть степеней свободы: U, V, W, UX,
UY, UZ, описание и правило знаков для которых приведены в разделе
3.2.4.
3.2.6. Особенности задания исходной
информации для плоских КЭ
Введение шарниров в узлах плоских КЭ с использованием
документа 2 не допускается.
При задании исходной информации в строке 2 заглавного
документа 0 - указывается один из допустимых для данных КЭ
признаков системы:
1 - плоская деформация или плоское напряженное состояние
(балка-стенка);
3 - изгибное состояние (плита);
58
5 - плоское напряженное и изгибное состояния (пологая
оболочка).
С помощью строки 4 этого же документа производится управление
печатью напряжений и усилий, где для рассматриваемого КЭ могут
быть указаны следующие признаки:
100 - выдаются на печать напряжения (усилия) в узлах и в центре
тяжести элемента;
101 - выдаются на печать напряжения (усилия) в узлах, в центре
тяжести элемента, а также узловые реакции.
В случаях, если признак печати напряжений (усилий) отсутствует, не
равен 100 (101) или же после признака печати напряжений (100, 101)
отсутствует перечисление номеров элементов, для которых
необходимо выдать на печать напряжения (усилия), тогда на печать
выдаются напряжения только в центре тяжести КЭ.
В документе 1 информация об элементе помещается в одной
строке: сначала указывается номер типа КЭ, затем даётся ссылка на
соответствующую строку документа 3, где приводятся жесткостные
характеристики, после чего следует перечисление номеров узлов в
обусловленном порядке (см. рис. 3.1 - 3.3).
В документе 3 информация, относящаяся к конкретному КЭ, в
зависимости от того, к какому из случаев упругой симметрии относится
рассматриваемая задача, может размещаться в одной или нескольких
строках. В первой графе первой строки указывается номер типа
жесткости, соответствующий номеру, указанному во второй графе
строки документа 1, затем следуют жесткостные характеристики в
строго определенном порядке. Предусматривается два варианта
задания жесткостных характеристик:
1
вариант:
без
использования
служебной
информации
(идентификаторов) - изотропное тело. В этом случае количество
характеристик должно быть равно 3, 5 или 6. Указываются
следующие параметры:
E, , ;
- E, , , c1 , c2 ;
- E, , , x , y , z ,
где: E - модуль упругости;
- коэффициент Пуассона;
- толщина элемента в (м);
c1 , c2 - коэффициенты постели упругого основания на сжатие и
сдвиг соответственно;
x , y , z - направляющие косинусы, определяющие положение
оси X(n) системы координат, в которой выдаются усилия
(напряжения).
59
2
вариант:
с
использованием
служебной
информации
(идентификаторов), которая служит признаком преобразования
указанных в документе 3 жесткостных характеристик пластин в
заранее заданное представление. Таким признаком является
появление во второй графе одного из идентификаторов: GE ,
GEI ", GEO или GEA.
При плосконапряженном состоянии в документе 3 задаются
следующие параметры:
E
I
E1 E2 12 21 G12
GE O
A E E G
1 2 12 21 12 12,1 12,2 1,12 2,12
I
C2
C 2O C 2, x C 2, y
A C C C
2, x 2, y 2, xy
C1 C1
DZ z PL PN ,
в случае расчёта плоско деформированной системы задаются
дополнительные параметры:
I
T
E3 13 31
PD
TMP
E
O
3 13 31 23 32
1 2
A E3 13 31 23 32 12,3 3,12
Идентификатор GE или GEI означает, что материал пластины
изотропный и для него указываются: E - модуль упругости, -
коэффициент Пуассона, - толщина пластинки; идентификатор
GEO означает, что материал пластины обладает ортотропными
свойствами
и
для
него
задаются:
E1 E2 12 21 G12 ;
идентификатор GEA означает, что материал пластины анизотропный
и задаётся E1 E 2 12 21 G12 12 12,1 12, 2 1,12 2,12 .
Идентификаторы PD означают:
PD или PDI - изотропный материал;
PDT - трансверсально-изотропный материал;
PDO - ортотропный материал;
PDA - анизотропный материал.
C1, C 2 определяют наличие
Идентификаторы
основания.
После
идентификатора
60
C1
следует
упругого
значение
коэффициента
постели
C1 (т м 3 )
равное жесткости
упругого
основания на сжатие. Идентификаторы С 2, C 2 I , C 2O, C 2 A
определяют жесткость упругого основания на сдвиг (срез). При этом
идентификаторы C 2 и C2 I указывают, что модель упругого
основания изотропная и для него указывается
C2 (т м 3 )
-
коэффициент постели на сдвиг; идентификатор C2O означает, что
модель упругого основания ортотропная и для него задаются
C2, x C2, y ; идентификатop C2 A означает, что модель упругого
основания обладает
указываются значения
анизотропными
C2, x C2, y C2, xy .
свойствами
и
для
неё
Идентификатор DZ предусматривает задание эксцентриситета
z .
Идентификаторы PL, PN , PD используются при расчете балокстенок и плит оболочечными элементами и определяют вид
напряженно-деформированного состояния, а именно:
PL - изгибное состояние;
PN - плоское напряженное состояние;
PD - плоская деформация.
При плоской деформации требуется введение дополнительных
характеристик материала. Идентификатор TMP предусматривает
задание в документе 3 коэффициентов линейного расширения
материала при температурной нагрузке. В случае изотропного или
трансверсалально-изотропного тела задаётся один коэффициент
( град. 1 ) ,
а в случае ортотропного или анизотропного тела
задаётся два коэффициента 1 , 2 по направлению осей ортотропии
в плоскости элемента.
Общее количество чисел в одной строке документа 3, включая
служебные слова (идентификаторы), не должно превышать десяти.
Oстальные
жесткостные
характеристики
записываются
в
последующих строках с проставлением нуля в первой графе.
3.2.7. Нагрузки на пластинчатые элементы
Допускается задание нагрузок на конечный элемент, как в местной,
так и в общей системах координат с привязкой, как в местной, так и в
общей системах координат.
Наиболее часто используемые виды нагрузок:
61
5, 15 - сосредоточенная, задаваемая относительно осей местной или
обшей систем координат соответственно, с привязкой в местной
системе координат;
35 - сосредоточенная, задаваемая относительно осей обшей системы
координат с привязкой в общей системе координат;
6, 16 - равномерно распределённая, задаваемая относительно осей
местной и обшей систем координат соответственно;
8, 18 - температурное воздействие при расчёте конструкций из
материалов, обладающих соответственно изотропными или
анизотропными (ортотропными) свойствами;
38 - температурное воздействие, задаваемое при расчёте
анизотропных (изотропных, ортотропных) тел, с заданием
коэффициентов линейного расширения непосредственно в
документе 3 после идентификатора TMP .
Схемы приложения нагрузок, описание и порядок задания в
документах 6 и 7 того или иного типа местной нагрузки на тот или иной
тип КЭ представлены в табл. 3.2.1.
Положительный знак вертикальных сил P и q означает, что они
направлены против осей координат. Положительный знак моментов M
и m означает, что их направление совпадает с направлением
вращения часовой стрелки, если смотреть с конца соответствующих
осей. При положительном знаке температурного перепада считается,
что верхнее волокно имеет более высокую температуру, чем нижнее.
3.3. Универсальные конечные элементы для решения
пространственной задачи теории упругости
Эти
КЭ
предназначены
для
определения
напряженнодеформированного состояния континуальных объектов и массивных
пространственных конструкций из однородного (по направлению
любой из осей X1, Y1, Z1 элемента) изотропного, трансверсальноизотропного или ортотропного линейно-упругого материала в
постановке трёхмерной задачи теории упругости. При этом возможно
рассмотрение одного из следующих случаев упругой симметрии:
Таблица 3.2.1
Нагрузки на пластинчатые КЭ
Тип
КЭ
1
Направ
Вид
лен. Величина нагрузки
нагруз нагрузк
и привязка
ки
и
10.06 Схема и описание нагрузки
2
3
4
5
Сосредоточенная нагрузка в плоскости элемента XlO1Z1 (XlO1Y1)
62
21-24
5
Z 1 (Y 1 )
41, 42
P Z(Y)
b
Px
Рх(m), a(м), b(м)
3
1
Рz(m), a(м), b(м)
Рх(m), a(м), b(м)
2
Рy(m), a(м), b(м)
1
РX(m), a(м), b(м)
3
1
РZ(m), a(м), b(м)
РX(m), a(м), b(м)
2
РY(m), a(м), b(м)
1
РX(m), a(м), b(м)
3
1
РZ(m), a(м), b(м)
РX(m), a(м), b(м)
2
РY(m), a(м), b(м)
X1
а
01
21-24
1
15
Z(Y)
Z 1 (Y 1 )
41, 42,
44
P Z(Y)
Px
b
а
01
X1
X
21, 23
35
Z(Y)
Z 1 (Y 1 )
41, 44
P Z(Y)
Px
b
01
а
X1
X
продолжение таблицы 3.2.1
1
3
4
5
Сосредоточенная нагрузка из плоскости элемента – силы и моменты
5
3
РZ(m), a(м), b(м)
Y1
Z1
4, 5
PZ
b
11, 12
41 42,
44
2
X1
а
63
M(m м), a(м), b(м)
11, 12
41, 42
15
Z
Y1
Z1
3
РZ(m), a(м), b(м)
4, 5
M(m м), a(м), b(м)
PZ
b
X1
Y
21-24
41, 42,
44
а
X
Равномерно распределённая нагрузка в плоскости элемента
6
1
qX(m/м2)
Z 1 (Y 1 ) q Z(Y)
qx
3
1
qZ(m/м2)
qX(m/м2)
2
qY(m/м2)
1
qX(m/м2)
3
1
qZ(m/м2)
qX(m/м2)
2
qY(m/м2)
X1
21, 23
41, 44
16
Z(Y)
Z 1 (Y 1 )
q Z(Y)
qx
X1
X
продолжение таблицы 3.2.1
1
2
3
4
5
Равномерно распределённая нагрузка из плоскости элемента — силы и моменты
по площади
11, 12
6
3
qZ(m/м2)
41, 42
Z1
Y1
4
mX(mм /n.м)
q
z
5
X1
64
mY(mм /n.м)
11, 12
41, 42
Z
Z1
Y1
16
qz
X
3
qZ(m/м2)
4
mX(mм /n.м)
5
mY(mм /n.м)
1
Y
X
11, 12
21-24
41, 42,
44
21-24
11, 12
41, 42,
44
11, 12
21-24
41, 42,
44
11, 12
21-24
41, 42
21-24
11, 12
41, 42,
44
Температурное воздействие (нагрев, охлаждение)
t (град.) – увеличение (уменьшение) 8
0
t,
температуры
по
отношению
к
t,
нормальным условиям эксплуатации,
t, t,
когда температура элемента равна t(0)
(t=t-t(0);
t
(град.)
градиент
1
t, 1
температуры постоянной по толщине
3
t, 2
КЭ (t=tВ- tН), где tВ и tН —
4
t, 1
температура на верхней и нижней
5
t, 2
поверхностях КЭ соответственно);
1, 4
t,t, 1
г р1ад. – коэффициент линейного
2, 5
t,t, 2
расширения
материала, 18
0
t, 1, 2
обладающего
изотропными
t, 1, 2
свойствами;
t, t, 1, 2
1 г р1ад. , 2 г р1ад. – коэф0
t
фициенты линейного расширения 38
t
материала,
обладающего
t, t
ортотропными
свойствами,
соответственно в направлении осей
1
t
ортотропии Х и Y (Z);
3
t
Примечание:
4
t
При
использовании
38
вида
5
t
температурной
нагрузки
1, 4
t, t
коэффициенты
линейного
2, 5
t, t
расширения материала должны быть
обязательно заданы в документе 3 с
идентификатором "ТМР".
полная симметрия (изотропное тело);
три плоскости упругой симметрии (ортотропно анизотропное или
ортотропное тело).
Кроме того, возможно решение объёмной задачи теории упругости
для двухкомпонентных материалов (железобетона, композитов и
т.д.), при котором один из компонентов (армирующий) обладает более
высокими прочностными свойствами, чем основной (связующий).
Предполагается, что армирующий материал (отдельные стержни,
сетки и т.п.) расположены ортогонально осям местной системы
65
4
Z
W
Z
Z1
17
3
Y1
V
8
UW
5
2
V
координат
элемента.
Такие
двухкомпонентные
материалы
носят
название
конструктивноортотропных.
Введение шарниров
в
узлах
пространственных КЭ с
использованием
документа 2, а также
дробление элемента не
допускаются.
X
3.3.1. Общее описание
универсального
U X1
пространственного КЭ
Рис. 13.5. Схематическое
изображение КЭ 32
2
в форме
Y
X
параллелепипеда (КЭ-31)
Y
3
4
Данный КЭ предназначен
для
прочностного
расчета
континуальных
объектов
и
массивных пространственных конструкций, у которых оси ортотропии
совпадают или не совпадают с осями местной системы координат.
На рис 3.4 представлены схематическое изображение КЭ и
последовательность нумерации его узлов.
В каждом из узлов КЭ имеется по три степени свободы U, V, W,
представляющие собой линейные перемещения вдоль осей X1, Y1, Z1,
положительные направления которых совпадают с направлением
соответствующих осей.
Рис. 3.4. Схематическое изображение КЭ 31
3.3.2. Общее описание пространственного КЭ
в форме тетраэдра (КЭ - 32)
Данный
КЭ
предназначен
для
прочностного
расчёта
континуальньх объектов и массивных пространственных конструкций.
На рис. 3.5 представлено схематическое изображение КЭ.
Последовательность нумерации узлов - произвольная.
В каждом из узлов КЭ имеется, по три степени свободы U, V, W,
определённые относительно осей X, Y, Z общей системы координат
положительные направления которых совпадают с направлением
осей координат.
66
3.3.3. Общее описание пространственного КЭ
в форме трехгранной призмы (КЭ - 33)
Данный
КЭ
Z
предназначен
для
прочностного
расчёта
Y1
Z1
континуальных объектов и
V
массивных
пространственных
6
W
конструкций.
На рис. 3.6
4
5
представлены
3
схематическое
изображение КЭ и
последовательность
U
X
1
1
нумерации его узлов.
2
В каждом из узлов
Y
имеется по три степени
X
свободы
U,
V,
W,
Рис. 3.6. Схематическое изображение КЭ 33
представляющие
собой
линейные
перемещения
вдоль осей X1, Y1, Z1, положительные направления которых совпадают
с направлением соответствующих осей.
3.3.4. Общее описание пространственного восьмнузлового
изопараметрического КЭ (КЭ - 36)
Данный
КЭ
предназначен
для
прочностного
расчета
континуальных объектов и массивных пространственных конструкций,
у которых оси ортотропии совпадают с осями местной системы
координат. На рис. 3.7 представлено схематическое изображение КЭ и
последовательность нумерации его узлов.
В каждом из узлов КЭ имеется по три степени свободы U, V, W,
определённые относительно осей X, Y, Z общей системы координат и
представляющие
собой
линейные
перемещения
вдоль
67
соответствующих осей, положительные
совпадают с направлением осей координат.
Z
7
направления
которых
3.3.5. Особенности задания
исходной информации
для пространственных КЭ
8
При
задании
исходной
информации
в
строке
2
4
3
заглавного
документа
0
указывается один из допустимых
для
данных
КЭ
признаков
2
1
системы: 4 или 5.
С
помощью
строки
4
W
Y
V
документа
0
производится
управление печатью напряжений
X
U
и
усилий,
где
для
рассматриваемого КЭ могут быть
Рис. 3.7 Схематическое изображение КЭ 36 указаны следующие признаки:
100 - выдаются на печать
напряжения (усилия) в узлах и в центре тяжести элемента;
101 - выдаются на печать напряжения (усилия) в узлах, в центре
тяжести элемента, а также узловые реакции. В случаях, если
признак печати напряжений (усилий) отсутствует – на печать
выдаются напряжения только в центре тяжести КЭ.
В документе 1 сначала указывается номер типа КЭ - 31; 32; 33 или
36, затем даётся ссылка на соответствующую строку документа 3, где
приводятся жесткостные характеристики, после чего следует перечисление номеров узлов в обусловленном порядке (см. Рис. 3.4 - 3.7).
В документе 3 информация, относящаяся к конкретному КЭ в
зависимости от того, к какому из случаев упругой симметрии относится
рассматриваемая задача, может размещаться в одной или нескольких
строках. В первой графе первой строки указывается номер типa
жесткости, соответствующий номеру, указанному во второй, графе
строки документа 1, затем следуют жесткостные характеристики в
строго определенном порядке.
Предусматривается
два
варианта
задания
жесткостных
характеристик:
1
вариант:
без
использования
служебной
информации
(идентификаторов) - изотропное тело. В этом случае количество
характеристик должно быть равно 2, а именно: - E , , где: E модуль упругости; - коэффициент Пуассона.
5
68
2
вариант:
с
использованием
служебной
информации
(идентификаторов), которая служит признаком преобразования
указанных в документе 3 жесткостных характеристик объёмных
элементов в заранее заданное представление. Таким признаком
является появление во второй графе одного из идентификаторов:
"ОВ", "ОВI" или "ОВО". Общий вид задания исходных данных в
документе 3 выглядит следующим образом:
E
I
OB
E
E
E
G
G
G
O
1 2 3 12 21 13 31 23 32 12 13 23
EX X 1m
EXM m
X1
FI
FIR
Y1m
Z1m
X 2m
Y2m
Y1m
Z1m
X 2m
Y2m
( градус )
( рад)
XN X 1m
XNM m
X1
AL
ALR
Y1m
Y1m
Z1m
Z1m
X 2m
X 2m
Y2m
Y2m
( градус )
( рад)
Z 2m
Z 2m
Z 2m
Z 2m
KOEax Eay Eaz a Fax Fay Faz
TMP
1 2
.
3
Идентификатор "ОВ" или "ОВI" означает, что материал элемента
изотропный и для него указываются Е - модуль упругости, коэффициент Пуассона. Идентификатор "ОВО" означает, что
материал конструкции обладает ортотропными свойствами и для него
задаются E1 , E2 , E3 , 12, 21, 13, 31 23, 32, G12 , G31 , G23 . После
этого могут указываться в любом порядке идентификаторы "EX",
"EXM", "FI", "FIR", определяющие направление осей ортотропии Х(0),
Y(0), Z(0). При этом после идентификаторов "ЕХ", "ЕХМ" указываются
шесть чисел (первые три - координаты точки, лежащей на оси Х(0),
вторые три - координаты точки, лежащей на оси У(0) ), а после
69
идентификаторов "FI", "FIR" следуют три числа - значения углов
Эйлера ( - нутации, - прецессии, - чистого вращения) в градусах
или радианах соответственно, определяющие положение осей
ортотропии относительно осей местной системы координат КЭ.
При расчёте элементов конструкций, изготовленных из
материалов,
обладающих
ортогонально
анизотропными
(ортотропными) свойствами, направления главных осей симметрии
которых совпадают с направлениями осей местной системы
координат элемента углы Эйлера по умолчанию равны нулю. В случае
несовпадения осей ортотропии (ортогонально анизотропный
материал) с осями местной системы координат элемента пересчёт
физико-механических
характеристик
материала
производится
автоматически по заданным в документе 3 значениям углов поворота
осей ортотропии.
Идентификаторы "XN", "XNM", "AL", "ALR" определяют
направление осей X(n), Y(n), Z(n) системы координат в которой выдаются
напряжения. При этом, после идентификаторов "XN", "XNM"
указываются шесть чисел (первые три - координаты вектора или
точки, лежащей на оси X(n), вторые три - координаты вектора или
точки, лежащей на оси Y(n)), а после идентификаторов "AL", "ALR"
следуют три числа - значения углов Эйлера ( - нутации, прецессии, - чистого вращения) в градусах или радианах
соответственно, определяющие положение осей системы координат, в
которой выдаются напряжения относительно осей местной системы
координат КЭ.
Идентификатор "КО" определяет наличие конструктивной
ортотропии и предусматривает задание характеристик армирующего
материала
при
расчёте
конструкций,
изготовленных
из
двухкомпонентных материалов (биматериалов). Предполагается, что
армирующий материал (отдельные стержни, сетки и т. п.) расположен
ортогонально осям местной системы координат элемента. После
идентификатора "КО" указываются семь чисел в следующей
последовательности:
Еах, Еау ,Eaz - модули упругости армирующего материала по
направлениям осей X1, Y1, Z1 местной системы координат элемента
соответственно;
a - коэффициент Пуассона армирующего материала;
Fax, Fay, Faz - безразмерные коэффициенты характеризующие
степень армирования конструкции по направлениям осей X1, Y1, Z1
местной системы координат соответственно, представляют собой
отношение суммарной площади поперечного сечения арматуры к
площади поперечного сечения КЭ плоскостью, ортогональной
соответствующему направлению армирующего материала.
70
Идентификатор "ТМР" предусматривает задание в документе 3
коэффициентов линейного расширения материала при температурной
нагрузке. В случае изотропного или трансверсально-изотропного тела
задаётся одно число (градус), а в случае ортотропного тела
задаются три числа 1 x , 2 y , 3 z (градус) по
направлению осей ортотропии, соответственно.
Общее количество чисел в одной строке документа 3, включая
служебные слова (идентификаторы), не должно превышать 10.
Остальные
жесткостные
характеристики
записываются
в
последующих строках с проставлением нуля в первой графе.
3.3.6. Нагрузки на пространственные КЭ
Допускается задание нагрузок на конечный элемент, как в местной,
так и в общей системах координат с привязкой, как в местной, так и в
общей системах координат. Наиболее часто используются следующие
виды нагрузок:
5, 15 – сосредоточенная, задаваемая относительно осей местной или
общей систем координат соответственно, с привязкой в местной
системе координат;
35 – сосредоточенная, задаваемая относительно осей общей системы
координат с привязкой в общей системе координат;
6, 16 – равномерно распредёленная, задаваемая относительно осей
местной и общей систем координат соответственно;
8, 18 – температурное воздействие при расчёте конструкций из
материалов, обладающих изотропными или ортотропными
свойствами соответственно;
38 – температурное воздействие, задаваемое при расчёте изотропных
и ортотропных тел, указанием коэффициентов линейного
расширения
непосредственно
в
документе
3
после
идентификатора "ТМР";
Схемы приложения нагрузок, описание и порядок задания в
документах 6 и 7 того или иного типа местной нагрузки на
пространственные КЭ представлены в табл. 3.3.1.
11. Таблица 3.3.1
Нагрузки на пространственные КЭ
Тип
КЭ
Схема и описание нагрузки
1
2
11.01 В
ид
Haправнагруз ление
нагрузки
ки
3
4
Величина
нагрузки и
привязка
5
Сосредоточенная нагрузка, действующая по направлению осей местной
или общей систем координат
71
31, 33
Z1
Pz1
5
1
2
3
PX1 (m); a, b, c (м)
PY1 (m); a, b, c (м)
PZ1 (m); a, b, c (м)
15
1
2
3
PX (m); a, b, c (м)
PY (m); a, b, c (м)
PZ (m); a, b, c (м)
35
1
2
3
PX (m); a, b, c (м)
PY (m); a, b, c (м)
PZ (m); a, b, c (м)
P y1
с
Px1
Y1
b
X1
a
31, 33
Z
Z1
P Y1
PZ1
PX1
b
с
Y1
Y
X1
а
31, 33
X
Z
Z1
Y1
PZ1
P Y1
X1
b
с
PX1
Y
X
а
продолжение таблицы 3.3.1
1
2
3
4
5
Равномерно распределенная нагрузка, действующая по направлению осей
местной или общей систем координат (q – интенсивность нагрузки; NГР –номер
грани). Если номер грани равен нулю, то нагрузка является равномерно
распределенной по объему (собственный вес)
72
31, 33
Z1
6
1
2
3
q ( т/м3 ), NГР
16
1
2
3
q ( т/м3 ), NГР
Y1
qY
q Z(Y)
qx
Nгр
X1
NГР = 1 при Х1 = 0
NГР = 2 при Х1 = a
NГР = 3 при Y1 = 0
NГР = 4 при Y1 = b
NГР = 5 при Z1 = 0
NГР = 6 при Z1 = с
31-34,
36
Z
Z1
Y1
Y
X1
X
Температурное воздействие (нагрев, охлаждение).
31-34, t (град.) –увеличение (уменьшение) 8
0
t,
36
температуры
по
отношению
к
1
t, 1
нормальным условиям эксплуатации,
2
t, 2
когда температура элемента равна t(0)
3
t, 3
(t=t'-t(0));
18
0
t, 1, 2, 3
(1/град.) – коэффициент линейного
расширения
материала,
обладающего
изотропными
свойствами;
продолжение таблицы 3.3.1
1
2
3
73
4
5
31-34, 1, 2, 3, (1 /град.) – коэффициенты 38
36
линейного расширения материала,
обладающего
ортотропными
свойствами,
соответственно
в
направлении осей ортотропии X, Y, Z;
Примечание:
При использовании 38 вида
температурной нагрузки
коэффициенты линейного
расширения материала должны быть
обязательно заданы в документе 3 с
идентификатором "ТМП".
0
1
2
3
t,
t, 1
t, 2
t, 3
Положительный знак горизонтальных и вертикальных сил Р и q
означает, что они направлены против осей координат.
3.4. Специальные конечные элементы
Элементы предназначены для ограничения линейных и угловых
перемещений по направлениям осей местной системы координат (в
общем случае не совпадающей с общей системой координат),
введения связей конечной жесткости по направлению осей общей
системы координат, а также для учёта податливости материала между
смежными узлами (податливость раствора или закладных деталей в
железобетонных элементах и др.).
3.4.1. КЭ моделирующий связь конечной жесткости (тип КЭ - 51)
Данный КЭ применяется для введения связи конечной жесткости
по направлению одной из предусмотренных вычислительным
комплексом степеней свободы. Так, например, для степеней свободы
1, 2, 3 КЭ позволяет смоделировать работу пружины (упругого
основания). Связи конечной жесткости могут задаваться только по
направлению осей общей системы координат.
Введение связи конечной жесткости в узел, имеющий по
соответствующему направлению абсолютно жесткую связь, не
допускается.
При задании исходной информации в строке 2 заглавного
документа 0 может быть указан любой признак системы.
В документе 1 информация об элементе помешается в одной
строке: сначала указывается номер типа КЭ – 51, затем даётся
ссылка на соответствующую строку документа З, после чего
указывается номер узла, в которой вводится упругая связь.
74
В документе 3 информация, относящаяся к конкретному КЭ,
занимает одну строку: в первой графе указывается номер типа
жесткости, соответствующий номеру, указанному во второй графе
документа 1, после чего указываются два числа – код степени
свободы, по направлению которой вводится связь, и жесткость
вводимой связи (длина стержня связи всегда равна 1).
3.4.2. КЭ моделирующий упругую связь
между узлами (тип КЭ - 55)
Данный КЭ предназначен для учёта податливости между
смежными узлами, например, податливости закладных деталей
железобетонных конструкций покрытия.
Элемент описывается двумя узлами, в каждом из которых имеется
по шесть степеней свободы (в общей системе координат). Элемент
позволяет моделировать как линейную так и угловую податливость
связи относительно осей X, Y, Z.
Элементы, моделирующие упругая связь, могут иметь нулевую
длину.
Допустимыми признаками системы для КЭ – 55 являются – 4 и 5.
В документе 1 информация об элементе помещается в одной
строке: сначала указывается тип КЭ – 55, затем даётся ссылка на
соответствующую строку документа З, после чего указываются номера
узлов, между которыми нужно учесть податливость связи.
В документе 3 информация, относящаяся к конкретному КЭ
занимает одну строку: в первой графе которой указывается номер
типа жесткости, соответствующий номеру, указанному во второй
графе документа 1, после чего следуют шесть чисел, представляющих
собой жесткости связи, равные силе, вызывающей единичную
деформацию связи по направлению осей X, Y, Z и моменту,
вызывающему единичные повороты относительно осей X, Y, Z.
Местные нагрузки по области конечного элемента не предусмотрены.
3.4.3. "Нуль-элемент" общего вида (тип КЭ -154)
"Нуль-элемент" представляется как двух узловой элемент. Узел 1
принадлежит рассчитываемой конструкции, а узел 2 - свободный.
Местная система координат образуется аналогично КЭ-10 (см. рис.
3.8). Так как "Нуль-элемент" приспосабливается к признаку системы,
то количество и направление степеней свободы в узлах "нульэлемента" ограничивается в соответствии с признаком системы (табл.
3.4.1).
75
Z
Y1
Z1
W
V
2
3
X1
U
1
Y
X
Рис. 3.8. Схематическое изображение КЭ 154
При задании исходной
информации в строке 2
заглавного документа 0
указывается
любой
из
предусмотренных
вычислительным
комплексом
признаков
системы. В документе 1
информация об элементе
помещается
и
одной
строке:
сначала
указывается номер типа КЭ
- 154, затем даётся ссылка
на соответствующую строку
документа 3, после чего
следует
перечисление
номеров узлов элемента в
обусловленном
для
данного элемента порядке.
В
документе
3
указываются
величины
Номер
жесткостных характеристик
признака
системы
в
количестве,
соответствующему
числу
1
степеней свободы (1…6) и
u , w, (1, 3, 5)
2
3
порядке,
обусловленном
w, , (3, 4, 5)
3
3
признаком системы. При
u
,
v
,
w
(1,
2,
3)
4
3
этом ненулевыми задаются
жесткости,
u , v, w, , ,
5
6
соответствующие
запрещаемым
степеням
свободы в местной системе координат. В случае совпадения
координат первого и второго узлов дополнительно указываются
направляющие косинусы определяющие положение оси X1.
При расчёте на заданные перемещения величина перемещения пo
каждому из направлений задаётся как местная нагрузка вида 11 по
одному из направлений 1…6 (относительно осей местной системы
координат). Величины линейных перемещений задаются в метрах,
угловых - в радианах. Положительные направления линейных
смешений – по направлениям соответствующих осей, угловых – по
направлению вращения часовой стрелки, если смотреть с конца
соответствующей оси. Заданные перемещения можно задавать только
в направлениях, по которым и документе 3 указаны ненулевые
жесткости.
Таблица 3.4.1
Число
1. Степени
степеней свободы
свободы
2. узла
u, w (1, 3)
2
76
Одной из целей применения "нуль-элемента" является наложение
связей на перемещения по направлению степеней свободы 1…6,
определённые относительно осей местной системы координат (в
общем случае не совпадающей с общей системой координат). Связи
накладываются только на перемещения в направлениях, по которым в
документе З заданы ненулевые жесткости. Кроме того, вычисляются
усилия в узле 1 "нуль-элемента", представляющие собой реакции в
наложенных связях или реакции от заданного перемещения узла 1 по
соответствующим направлениям. Их количество зависит от
количества наложенных связей.
3.5. КЭ предназначенный для исключения элементов
из расчётной схемы (тип КЭ – 200)
Данный КЭ служит для исключения элементов из расчётной схемы
без изменения порядка нумерации всех элементов. Это позволяет
более широко использовать регулярность в описании расчётной
схемы. Применяется также для моделирования различных отверстий
и корректировке расчётной схемы. КЭ работает при любом из
предусмотренных признаков системы.
При задании исходной информации в первой графе документа 1
указывается тип КЭ – 200, затем даётся ссылка на соответствующую
строку документа 3, после чего следует перечисление номеров узлов.
Тип жесткости (графа 2) не должен быть нулевым.
Исключить элемент из расчётной схемы можно с помощью строки
38 документа 0, в которой указывается тип КЭ – 200 и
перечисляются номера элементов, исключаемые из схемы.
Пример:
(0/ … /38;200:5-56 77 78 79/ … /).
КЭ – 200 не влияет на работу документов 2 … 7. На местные
нагрузки КЭ не реагирует. Печать усилий и напряжений не
производится.
4. АНАЛИЗ РЕЗУЛЬТАТОВ РАСЧЕТА
Визуализация напряженно-деформированного состояния схемы
значительно облегчает анализ результатов решенной задачи.
Используя
графические
возможности
(в
пособии
не
рассматриваются) можно оценить достоверность деформированного
состояния схемы каждого загружения или комбинации загружений,
получить цифровую информацию для любого узла и элемента.
Для сложных расчётных схем, а также для больших задач
рекомендуется выполнять расчёт на одно или несколько контрольных
загружений, в которых характер перемещений известен. Проверка
77
загружений упрощается, когда расчетная схема симметрична, а
нагрузки симметричны или кососимметричны.
Если в результате расчёта перемещения некоторых узлов очень
велики, то обычно:
не наложены необходимые связи;
наличие в узле разнородных КЭ допускает перемещение в этом
направлении (необходимо наложить связи);
система мгновенно изменяема.
Если характер перемещений узлов отличен от ожидаемого, то
необходимо проверить:
координаты узлов;
наличие связей между элементами;
жесткостные характеристики элементов;
шарниры;
закрепления (связи).
Если проверка глобального равновесия выполнена, а характер
перемещений или усилий не соответствует ожидаемому, то это
значит, что расчётная схема некорректна.
Если в результате решения задачи нет равновесия в узле, то
следует проанализировать соотношение жестокостей элементов,
входящих в узел. Нужно обратить внимание на короткие, но очень
жесткие элементы, примыкающие к длинным элементам с небольшой
жесткостью, и либо изменить жесткости этих элементов, либо ввести
вместо них другие. Так, если стержень, моделирующий подкрановую
консоль, обладает очень большой жесткостью, то это может привести
к неустойчивому решению системы уравнений.
Управление точностью формирования матрицы реакций и решения
системы линейных уравнений позволяет задавать большой разброс
жесткостей. Так, для однопролётной одноэтажной рамы с высотами
подкрановых и надкрановых частей колонн 18 и 12 м и длине
подкрановой ступени всего 100 мм можно получить приемлемое
решение при назначении жесткости подкрановой ступени на 6
порядков выше жестокостей колонн. Однако дальнейший разброс
жестокостей резко ухудшает решение.
Возможен редкий случай, когда есть равновесие в узлах, но нет
глобального равновесия системы. В этом случае следует искать
изменяемость в расчётной схеме.
Когда, наконец, для расчётной схемы получено приемлемое
решение от контрольных загружений, можно переходить к решению
задачи с реальными нагрузками.
4.1. Результаты линейного расчета
78
Результатами статического расчёта схемы являются перемещения
её узлов, усилия и напряжения в сечениях элементов, а также
узловые усилия в плоскостных и пространственных конечных
элементах. Результатами динамического расчёта являются периоды,
частоты и формы колебаний для каждого тона, а также инерционные
силы и соответствующие им перемещения узлов и усилия
(напряжения) в элементах.
Линейные перемещения положительны, если они направлены
вдоль соответствующих осей. Угловые перемещения положительны,
если они направлены против часовой стрелки, если смотреть с конца
соответствующих осей.
В стержневых элементах соблюдается правило знаков для усилий,
приведенное в табл. 4.2.1. При этом рассматривается сечение
стержня, принадлежащее его концу;
правила чтения усилий и узловых реакций для КЭ плиты, балкистенки и оболочки приведены в табл. 4.3.1;
для объёмных КЭ – в табл. 4.4.1;
для КЭ связей конечной жесткости – в табл. 4.5.1;
для нуль-элемента – в табл. 4.6.1.
В этих таблицах основными единицами размерности результатов
расчёта являются: единицы длины (L), силы (F). По умолчанию
принимается: (L) - метры, (F) - тонны силы. Единицы измерения
прочих величин являются производными от основных.
При расчёте на, сейсмические, пульсационно-ветровые, ударные и
импульсивные воздействия определяются собственные частоты
i (i KF ), где KF - количество форм, заданное пользователем.
Вычисляются также периоды собственных колебаний Ti , формы
колебаний, инерционные силы и соответствующие им перемещения и
усилия.
4.2. Стержневые
элементы
Результатами
расчёта
являются
усилия,
соответствующие
заданному
типу
стержневой процедуры. На
рис.
4.1
показаны
положительные
направления усилий:
Рис.4.1. Положителные
направления усилий
79
N - осевое усилие, положительный знак соответствует растяжению;
MY - изгибающий момент действующий относительно Y1.
Положительный момент действует в конце стержня против
часовой стрелки, при взгляде с конца оси Y1;
МZ - изгибающий момент действующий относительно Z1.
Положительный момент действует в конце стержня против
часовой стрелки, при взгляде с конца оси Z1.
MX - изгибающий момент действующий относительно Х1.
Положительный знак момента означает кручение конца стержня
против часовой стрелки, при взгляде с конца оси X1;
QY - перерезывающая сила, действующая на сечение стержня вдоль
оси Y1. Положительная сила совпадает с направлением оси Y1 в
конце стержня;
QZ - перерезывающая сила, действующая на сечение стержня вдоль
оси Z1. Положительная сила совпадаете направлением оси Z1 в
конце стержня.
Таблица 4.2.1
Правила чтения усилий для стержней
80
Ин- Размердекс ность
1
Описание
Положительный знак усилия определяет
3
4
2
N
F
МКР
FL
MY
FL
1
Осевое усилие
Растяжение.
Крутящий
момент Действие против часовой стрелки, если
относительно оси X1
смотреть с конца оси X1, на сечение,
принадлежащее концу стержня.
Изгибающий
момент Действие в конце стержня против часовой
относительно оси Y1
стрелки, при взгляде с конца оси Y1;
продолжение таблицы 4.2.1
2
3
QZ
F
MZ
FL
QY
F
4
Перерезывающая сила Coвпадение с направлением оси Z1 для
вдоль оси Z1
сечения, принадлежащего концу стержня.
Изгибающий
момент Действие против часовой стрелки, если
относительно оси Z1
смотреть с конца оси Z1, на сечение,
принадлежащее концу стержня.
Перерезывающая сила Совпадение с направлением оси Y1 для
вдоль оси Y1
сечения, принадлежащего концу стержня.
4.3. Плоские элементы
В результате расчёта вычисляются перемещения узлов в общей
системе координат, а также усилия в центре тяжести элемента в
местной системе координат (по умолчанию). Кроме того, в
зависимости от указанного в строке 4 документа 0 признака, могут
вычисляться также напряжения в узлах элемента и узловые реакции.
Узловые реакции выдаются в местной системе координат.
Правила чтения усилий, напряжений и узловых реакций приведены
в табл. 4.3.1. При этом размерность дана для случая задания
жесткостных характеристик, координат и нагрузок в тоннах и метрах. В
случае использования других единиц измерения при пользовании
результатами
расчёта
необходимо
учитывать
переходные
коэффициенты.
Таблица 4.3.1
Правила чтения усилий и узловых реакций в плоских КЭ
Тип КЭ
Индекса- Размерция
ность
Описание
Правило знаков
4
4
1
2
3
11.02 Мембранные напряжения
21-24
41, 42, 44
N x ( x ) т
21-24
41, 42, 44
N y ( y ) т
Нормальное напряжение, Положительный знак
2 действующее вдоль оси X соответствует
1
м
растяжению
Нормальное напряжение, То же
м 2 действующее вдоль оси Y1
81
41, 42, 44
21-24
N z ( z ) т м 2
Txz ( xz ) т
41, 42, 44 Txy ( xy ) т
Нормальное напряжение, То же
действующее вдоль оси Z1
Касательное напряже-ние, Положительно
2 параллельное оси X в случае совпадения
1
м
плоскости X10Y1
направлением X1
Касательное напряже-ние, Положительно
2 параллельное оси X в случае совпадения
1
м
плоскости X10Z1
направлением X1
в
с
в
с
продолжение таблицы 4.3.1
1
2
11, 12,
41, 42, 44
Mx
11, 12,
41, 42, 44
My
11, 12,
41, 42, 44
M xy
11, 12,
41, 42, 44
Qx
11, 12,
41, 42, 44
Qy
11, 12,
41, 42, 44
Rz
21-22,
41, 42, 44
RX i
41, 42, 44
RYi
3
4
4
Изгибные усилия
Момент, действующий на Положительный моортогональное оси мент вызывает растм п.мсечение,
X1
тяжение
нижнего
волокна
(относительно оси Z1)
действующий на То же
тм п.мМомент,
сечение, ортогональное оси
Y1
Крутящий момент
Кривизна диагонали,
выходящей из узла 1,
обусловленная
действием
тм п.м
положительного
крутящего момента,
направлена
выпуклостью против
оси Z1
Перерезывающая сила в Положительная
т п.м сечении, ортогональномперерезывающая
оси X1
сила действует по
Перерезывающая сила в направлению оси Z1
ортогональном на той части КЭ, в
т п.м сечении,
которой отсутствует
оси Y1
узел 1
Реактивный отпор грунта Положительное
при
расчёте
плит
и усилие действует по
т оболочек на упругом направлению оси Z1
основании
(знак минус означает,
что грунт сжат)
Узловые реакции
Горизонтальное усилие в i-Положительное
узле КЭ, совпадающее усилие действует на
т том
с направлением оси X1
i-тый
узел
по
направлению оси X1
Горизонтальное усилие в i-Положительное
узле КЭ, совпадающее усилие действует на
т том
с направлением оси Y1
i-тый
узел
по
направлению оси Y1
82
11, 12,
21-22,
41, 42, 44
RZ i
т
11, 12,
41, 42, 44
RUX i
тм
11, 12,
41, 42, 44
RUYi
тм
Вертикальное усилие в i- Положительное
том узле КЭ, совпадающее усилие действует на
с направлением оси Z1
i-тый
узел
по
направлению оси Z1
Реактивный момент в i-том Положительный
узле КЭ, относительно оси момент, действует на
X1
i-тый узел против
часовой
стрелки,
если
смотреть
с
конца оси X1
Тоже, относительно оси Y1 Тоже, если смотреть
с конца оси Y1
Положительное направление узловых реакций и усилий для
прямоугольного КЭ плиты показаны на Рис. 4.2.
Y1
Z1
3
Mx
4
Qx
Z1
Qy Mxy
3
My
Mxy
My
Mxy
Mx
Qx
1
4
R ux1
2
Ruy1
X1
1
Mxy
X1
Qy
2
R z1
Рис. 4.2. Положительное направление узловых реакций и усилий для
прямоугольных плоских КЭ
для треугольного КЭ плиты положительное направление узловых
реакций и усилий аналогичны.
Положительное направление узловых реакций и напряжений для
прямоугольного КЭ плоской задачи теории упругости ПНС приведены
на Рис. 4.3, для треугольного КЭ плоской задачи теории упругости
положительное направление узловых реакций и усилий аналогичны.
Для плоских прямоугольного и треугольного КЭ оболочки
положительные направления узловых реакций, напряжений и усилий
соответствуют показанным на Рис. 4.2 и Рис. 4.3.
83
Рис. 4.3. Положительное направление напряжений для
Y 1 (Z 1)
прямоугольного
КЭ плоской
задачи
теории упругости
y
z
xz
xy
xy
x
x
xz
xy
xz
y
Z 1 (Y1 )
X1
xz
xy
z
При расчёте плоско деформируемых систем, кроме напряжений,
действующих в плоскости КЭ, вычисляются нормальные напряжения,
действующие в направлении, ортогональном плоскости КЭ, а именно:
КЭ 21-24 это будет
N y ( y ) ( т м 2 );
КЭ 41, 42, 44 это будет
N z ( z ) ( т м 2 ).
4.4. Пространственные элементы
В результате расчёта вычисляются усилия в центре тяжести
элемента в местной системе координат. Кроме того, в зависимости от
указанного в строке 4 документа 0 признака, могут вычисляться также
напряжения в узлах элемента и узловые реакции (узловые реакции
выдаются в местной системе координат).
Положительные направления узловых реакций и напряжений
приведены на рис. 4.4.
Правила чтения напряжений приведены в табл. 4.4.1.
12. Таблица 4.4.1
Правила чтения напряжений в объёмных КЭ
Тип КЭ
1
Индекса- Размерция
ность
2
Описание
Правило знаков
4
4
3
84
Индекса- Размерция
ность
Тип КЭ
1
2
Правило знаков
4
4
3
N y ( y ) т
Нормальное напряжение, Положительный знак
2 действующее вдоль оси X1 соответствует
м
растяжению
Нормальное напряжение, То же
2 действующее вдоль оси Y1
м
N z ( z ) т
Нормальное напряжение, То же
2 действующее вдоль оси Z1
м
N x ( x ) т
31, 32, 33,
36
Описание
Касательное напряжение, Положительно
2 параллельное оси X1 в случае совпадения
м
плоскости X10Y1
направлением X1
Касательное напряжение, То же
2 параллельное оси X1 в
м
плоскости X10Z1
Касательное напряжение, Положительно
2 параллельное оси Y1 в случае совпадения
м
плоскости X10Y1
направлением Y1
Txz ( xz ) т
Txy ( xy ) т
Tyz ( yz ) т
в
с
в
с
Рис.4.4. Положительные
и напряжений. направления узловых реакций
Z
x
zy
zy
y
Z1
yx
xz
x
zx
R uz
yx
xy
yx
xz
x
yx
z
y
Y
Rz
yx
zy
R uy
Ry
Rx
R ux
X
4.5. Специальные элементы (связи конечной жесткости КЭ 51, 55)
В результате расчёта для КЭ 51 вычисляётся усилие Ri
соответствующее степени свободы, по направлению которой введена
связь конечной жесткости. Для КЭ 55 вычисляются усилия в связях,
наложенных вдоль соответствующих осей общей системы координат.
Правила чтения усилий и реакций для него приведены в табл. 4.5.1.
85
Таблица 4.5.1
Правила чтения усилий для специальных КЭ {51, 55}
Ин- Размердекс ность
1
2
RX
RY
RZ
F
F
F
RUX
RUY
RUZ
FL
FL
FL
NX
F
NY
F
NZ
F
1
2
MX
FL
MY
MZ
FL
FL
RZi
F
Описание
Положительный знак усилия
3
4
Усилие в линейной Действует
на
узел
против
связи,
наложенной соответствующей
оси
глобальной
вдоль осей координат системы координат.
Усилие
в
связи, Действует на узел по часовой стрелке,
ограничивающей
если
смотреть
с
конца
поворот вокруг осей соответствующей глобальной оси.
координат
Усилие
в
связи, Растяжение.
наложенной
по
направлению оси Х
То же, по направлению То же.
оси Y
То же, по направлению То же.
оси Z
продолжение таблицы 4.5.1
3
4
Усилие
в
связи, Действует в сечении, принадлежащем
воспринимающей
концу стержня, против часовой стрелки,
поворот относительно если смотреть с конца оси Х.
оси Х
То же, Y
То же, Y.
То же, Z
То же, Z.
Отпор
грунта
за Действует на узел вдоль оси Z.
пределами конструкции
в точке i элемента
4.6. Специальный элемент (нуль-элемент КЭ 154)
Для данного КЭ усилия вычисляются для сечения, относящегося к
началу (первый узел) элемента. Описание и правило знаков этих
реакций представлены в табл. 4.6.1.
Таблица 4.6.1
86
Правила чтения усилий для нуль-элемента (154 тип КЭ)
Признак
Ин- Разме
систем
декс рность
ы
1
2
3
Описание
Положительный знак усилия определяет
4
5
1, 2, 3, N
4, 5
3, 5
MK
F
2, 3, 5
FL
Вдоль оси (осевое Совпадение с направлением оси X1.
усилие) X1
Вокруг оси X1
Вращение по часовой стрелке, если
смотреть с конца оси X1.
Вокруг оси Y1
То же, с конца оси Y1
FL
F
F
То же оси Z1
Вдоль оси Y1
То же, оси Z1
M
MY
5
MZ
4, 5
QY
2, 3, 4, 5 Q
QZ
FL
То же, с конца оси Z1.
Действие против направления оси Y1.
То же, оси Z1.
87
5. СУПЕРЭЛЕМЕНТЫ
5.1. Общие положения
ПК «Мираж» и «ЛИРА-Windows» позволяют реализовать
суперэлементную модель конструкции. Основная расчётная схема
расчленяется на несколько схем, которые называются схемами
суперэлементов.
Узлы соединения (стыковки)
суперэлементов с основной
Y
схемой называют суперузлами
(СУ).
Алгоритм решения задачи
суперэлемент 3
суперэлемент 2
по методу суперэлементов
(МСЭ) основан на следующем:
пусть
исследуемый
объект
суперэлемент 4
расчленён на S подсхем
(суперэлементов СЭ), которые
суперэлемент 1
объединяются
в
общую
суперэлемент 5
основную схему при помощи N0
узлов (суперузлов). На рис.5.1
X суперузлы
обозначены
кружками.
Если в схеме имеются
Рис. 5.1. Суперэлементную модель
одинаковые суперэлементы, то
количество вычислений можно существенно сократить, если
проделать вычисления для одного типа и полученные результаты
использовать для СЭ этого же типа (даже в том случае, если они поразному ориентированы относительно общей системы координат).
Расчленение на подсхемы как правило не вызывает особых
затруднений и обычно связано с конструкцией объекта. Например,
при расчёте крупнопанельных зданий за суперэлемент принимается
стеновая панель.
В результате решения канонических уравнений основной схемы
(суперсхемы) определяются перемещения СУ, затем производится
расчёт каждого СЭ, который, по сути, представляет собой расчёт на
заданные (определённые из расчёта основной схемы) перемещения
СУ. Для этого используется уже имеющаяся система канонических
уравнений СЭ, обработанная неполным прямым ходом по Гауссу и
для неё выполняются несколько (по количеству загружений) обратных
ходов.
В результате этого определяются перемещения СУ СЭ. Затем по
заданным перемещениям определяются остальные компоненты
напряженно-деформированного состояния.
88
5.2. Исходные данные для суперэлемента
5.2.1. Базисные узлы, суперузлы
Описание исходных данных СЭ производится по общим правилам.
СЭ должен иметь свою внутреннюю нумерацию узлов и элементов.
Узлы, с помощью которых СЭ примыкает к основной схеме или к
другому СЭ, называются узлами стыковки или суперузлами. К ним
должны относиться также узлы сосредоточения массы при расчёте на
динамику, если даже эти узлы являются внутренними узлами СЭ. СЭ
должен иметь хотя бы один внутренний узел.
Для сокращения информации введено понятие базисного узла
(БУ). Это могут быть любые три СУ, если они не лежат на одной
прямой.
Каждый СЭ описывается в правой декартовой системе координат
X, Y, Z. При стыковке с основной схемой, которая также описывается в
правой декартовой системе, происходит переориентация СЭ по
отношению к осям основной схемы.
5.2.2. Документы исходных данных
Для каждого типа СЭ документы исходных данных заполняются по
общим правилам входного языка за некоторыми исключениями и
дополнениями приведенными ниже.
В документе 0 должна присутствовать строка 36, в которой
перечисляются номера СУ. Первые три узла интерпретируются как
БУ, которые используются для автоматической ориентации СЭ в
основной схеме.
Запрещено заполнять строки 34, 35, так как динамика может быть
описана только в основной расчётной схеме. При обнаружении
указанных строк, а также документа 15 выдаются сообщения об
ошибках.
Специальные
конечные элементы, принадлежащие СЭ, не
рекомендуется вводить в СУ.
В документе 5 СЭ запрещены любые преобразования с СУ.
Накладывать связи и объединять перемещения в СУ можно только
в документе 5 основной расчётной схемы.
В документе 6 описываются узловые и местные нагрузки на СЭ в
его системе координат по общим правилам. Номера загружений в
этом
документе
будут
интерпретироваться
как
номера
супернагрузок (СН) в документе 6 основной схемы. Если на СЭ нет
нагрузок, то документы 6 и 7 не заполняются.
Документ 8 (РСУ) для СЭ не задаётся.
89
5.3. Исходные данные основной схемы
Тип СЭ – это условный цифровой код, который может принимать
значение от 2001 и более. Тип выбирается произвольно и
записывается при описании СЭ в документе 1 основной схемы и
графе, где помещается тип конечного элемента. СЭ можно отнести к
одному типу, если они имеют одинаковые документы 1, 3, 4, 5.
Расчётная схема может содержать любое количество СЭ одного
типа. Номер СЭ – это порядковый номер его в документе 1 основной
схемы.
Заполнение документов исходных данных для основной схемы
производится по общим правилам входного языка, но имеет свои
особенности.
5.3.1. Документ 0
Строка 2: "Признак схемы". Этот признак должен включать все
перемещения, используемые для конечных элементов и СЭ основной
схемы.
5.3.2. Документ 1
Задаётся следующая информация:
тип СЭ;
номер строки в документе 3, где содержится информация со
специальными характеристиками данного элемента;
номера 3-X БУ по нумерации основной расчётной схемы,
перечисленных в том же порядке, что и в 36-й строке документа 0
данного СЭ.
Например (0/…/2005 3 36 45 14/…/).
Такая запись означает, что СЭ относится к типу 2005, в 3-й строке
документа 3 находятся его специальные характеристики, а узлы 36,
45 и 14 основной схемы определены как БУ. Несмотря на то, что в
документе 1 указаны только 3 узла, данный СЭ примыкает к основной
схеме всеми узлами стыковки.
5.3.3. Документ 3
Здесь записывается информация, необходимая для ориентации
СЭ, а также имя файла с текстом описания исходных данных СЭ,
либо вычисленные его жесткость и нагрузки.
90
Ориентация СЭ определяется записью: PSE=5 NU, где NU –
количество узлов стыковки. Имя текстового файла СЭ без
расширения (расширение принятое для файла СЭ – "txt")
определяется идентификатором «TSE».
Например: (3/…/3 PSE=5 32 TSE=TEST/…/).
В этом случае исходные данные суперэлемента хранятся в файле
с именем test.tхt.
5.3.4. Документы 6 и 7
Нагрузка на СЭ может задаваться, как в основной расчётной
схеме, так и в СЭ. Нагрузка на внутренние узлы СЭ, а также местные
нагрузки на его элементы задаются в его 6-м и 7-м документах.
При расчёте на динамические воздействия веса масс должны быть
сосредоточены только в узлах и СУ основной схемы.
При описании СН строка документа 6 содержит следующую
информацию:
номер СЭ в основной схеме;
код СН (всегда равен 50);
номер загружения СН (графа 5 документа 6 СЭ);
номер строки в документе 7, описывающий переходной
коэффициент к величине нагрузки, заданной в документе 7 СЭ
(если 0, то переходной коэффициент равен 1);
номер загружения основной схемы.
Например: (6/ …/28 50 4 6 2/ … /) – такая строка в документе 6
интерпретируется следующим образом: на 28-й СЭ задано 4-е
загружение СН с переходным коэффициентом, записанным в строке 6
документа 7, и эта нагрузка войдет в загружение номер 2 основной
схемы.
Переходной коэффициент позволяет изменять величины СН для
использования их в различных загружениях.
91
(a) 6. РЕКОМЕНДАЦИИ ПО СОСТАВЛЕНИЮ РАСЧЕТНЫХ СХЕМ
6.1. Принципы построения конечно-элементных моделей
Представляя расчётную схему сооружения в виде конечноэлементной модели, нужно стремится достичь компромисса,
удовлетворяя два противоречивых требования: получить как можно
более точное решение задачи и затратить меньшее время счёта. Для
этого необходимо уметь оценивать оба этих фактора. Если время
решения задачи легко прогнозируется на основе количества узлов,
элементов, загружений, а также быстродействия компьютера, то
оценка точности решения задачи является вопросом весьма сложным,
так как зависит от многих слабо формулируемых факторов:
густота КЭ сетки – с одной стороны, сгущение сетки
повышает точность, с другой стороны, неограниченное сгущение
может привести к потере точности;
физико-механические свойства расчётной модели –
расчётная схема может быть близка к геометрически изменяемой,
содержать элементы с сильно различающимися жесткостями, все это
также приводит к потере точности;
геометрия конечных элементов – если стороны элементов
сильно различаются по длине, то это приведит к плохой
обусловленности матрицы накопленных уравнений и также к потере
точности. Нужно стремиться к тому, чтобы элементы были близки к
равносторонним.
Назначение сетки надо проводить, учитывая многие
факторы. Так, например, густоту сетки предпочтительно
увеличивать только в местах предполагаемого большого
градиента напряжений (входящие узлы, места сосредоточенных
нагрузок и т.д.). Кроме того, знание свойств конечных
элементов также часто помогает рационально построить
конечно-элементную модель. Так, например, на рис 6.1.а
конечно-элементная модель более рациональна, чем на рис
а)
б)
Рис.6.1. Укрупнение разбивки схемы на КЭ
92
6.1.б, т.к. при моделировании перемычки, работа которой
близка к балочной схеме. Предпочтительней её чаще разбивать
по длине, т.к. прямоугольный конечный элемент балки-стенки
имеет полилинейный закон аппроксимации функций, что
автоматически моделирует закон плоских сечений, даже если
по высоте балки расположен только один элемент.
Необходимо особенно тщательно подходить к построению
конечно-элементной
модели,
если
схема
рассчитываемого
сооружения обладает свойствами, провоцирующими неустойчивый
расчёт: пологие мембраны, наличие гибких включений, наличие
элементов с малыми размерами, но большой жесткостью (например,
моделирование абсолютно жестких вставок или связей конечной
жесткости – короткими и очень жесткими стержнями). В этом случае
следует стремиться к сокращению размерности решаемой задачи. В
какой-то степени может помочь применение СЭ. Объявляя СЭ
небольшой фрагмент, включающий неблагополучные элементы,
можно несколько сгладить их негативное влияние.
6.2. Построение рациональных расчетных схем
Принцип фрагментации. Иногда приходится решать большие
задачи, в которых густая сетка невозможна из-за ограниченных
ресурсов ЭВМ, а укрупнённая
а)
разбивка
на
конечные
б)
элементы не даёт достаточно
полной картины напряженнодеформированного
состояния конструкции.
В ряде случаев можно
совместить укрупнённую и
густую
сетки,
используя
принцип Сен-Венана.
Например,
для
многоэтажного здания (рис.
6.2.а)
самой
важной
информацией
является
картина
напряженнодеформированного
состояния
первых
трёх
этажей.
Здесь можно выполнить
густую
разбивку
только
первых
трех
этажей.
Разбивка остальных этажей
может быть очень грубой.
Рис. 6.2. Реализация принципа
93
фрагментации
Результаты решения по третьему этажу можно игнорировать, так как
верхние 2-3 слоя конечных элементов в ней будут нести искаженную
информацию. Грубую информацию для вышележащих этажей можно
игнорировать либо использовать для оценки приближенного решения
всей системы.
Для более точного решения для вышележащих этажей
можно произвести очередную разбивку на конечные элементы,
например, см. рис. 6.2.б.
Решая задачу несколько раз, можно использовать расчёт
укрупненной схемы с последующей фрагментацией ее частей.
Фрагментация заключается в последовательном вырезании,
уменьшении и детальном расчёте какой-то области конструкции.
Применяется при необходимости исследования области концентрации
напряжений (вокруг отверстий, в местах резкого изменения сечений
элементов и т.д.), а также при решении больших задач, когда
первоначально рассчитывается укрупнённая схема, затем вырезаются
отдельные фрагменты этой схемы, которые дробятся более мелко и
рассчитываются на воздействия, полученные в результате
предыдущего расчёта. На рис.6.3 приведена часть рассчитываемой
конструкции.
Рис. 6.3. Сгущение сетки вблизи концентратора напряжений
94
Для простейшего случая, когда фрагмент связан с остальной
конструкцией лишь в точках, указанных на рис.6.3.а в виде нульэлементов, вполне оправдано сгущение сетки (эту сетку можно
сгустить ещё вдвое, вчетверо и т.д.).
Если прикрепление непрерывно по всему внешнему контуру, то при
разбивке по рис.6.3.б результаты решения по двум внешним рядам КЭ
следует принимать как оценочные (либо подбирать податливости
закреплений в промежуточных узлах, расположенных по контуру). При
разбивке по рис.6.3.в достаточно считать неточными результаты для
одного внешнего ряда (состоящего из треугольных элементов).
На рис.6.3.г показан один из способов дальнейшего
сгущения сетки конечных элементов.
Воздействия на узлы фрагмента от отброшенной части
конструкции нужно задавать в виде заданных перемещений,
полученных в результате расчёта по укрупнённой схеме (используя,
например, нуль-элементы).
Приёмы фрагментации несколько перекликаются с применением
СЭ, однако, и те и другие имеют своё назначение.
6.3. Глобальная, местная и локальная системы координат
На уровне задания, обработки и анализа приняты три системы
координат: глобальная (или общая), местная и локальная.
Глобальная система координат X Y Z – всегда правая
декартовая – служит для описания узлов всей системы, определения
направления степеней свободы, идентификации перемещений узлов.
Местная система координат X1 Y1 Z1 – всегда правая
декартовая, является прерогативой каждого конечного элемента.
Общее правило ориентации местной системы координат для
элемента – ось Х1, направлена от первого узла ко второму, для
пластинчатых – плоскостью элемента. Направления X1 Y1 Z1 для
каждого типа конечного элемента описаны в главе 3. Местная система
координат служит для задания местной нагрузки и идентификации
усилий и напряжений в элементе.
Локальная система координат
X2 Y2 Z2 – является
прерогативой каждого узла системы. В общем случае локальная
система координат совпадает с глобальной. Однако в ряде случаев
удобно задавать исходные данные и проводить анализ перемещений
в локальной системе координат.
Например, при работе с цилиндрическими, сферическими
системами координат или при наложении связей и расчёте на
заданные перемещения по направлениям, не совпадающим с
глобальной системой координат. Так, при расчёте цилиндрических или
сферических
конструкций
удобно
оперировать
цифровыми
значениями радиальных, меридиональных и широтных перемещений.
95
Для этого узлы системы должны иметь локальную систему координат
(см. пп.2.3.4, 2.10.1).
6.4. Использование приёма "объединение перемещений"
Одинаковые перемещения в разных узлах по заданному
направлению можно объединять. Эти перемещения получают один
порядковый номер, то есть происходит объединение нескольких
неизвестных в системе линейных алгебраических уравнений.
Такой приём позволяет объединять горизонтальные перемещения
узлов, принадлежащих перекрытию в плоских многоэтажных рамах,
показывая тем самым, что перекрытия представляет собой жесткий
диск: продольная сила, возникающая в перекрытии, ничтожно мала по
сравнению с сечением перекрытия, которое её воспринимает.
Сложнее объединять перемещения в пространстве по этажам
перекрытия.
Для симметричной многоэтажной рамы, можно пренебречь
закручиванием её вокруг вертикальной оси. Тогда достаточно
объединить перемещения всех узлов перекрытия по направлениям X,
Y и следовательно снизить порядок системы канонических уравнений.
Для случаев, когда центр жесткости здания не совпадает с центром
масс,
а
также
для
несимметричных в плане зданий
(особенно при недостаточной
расстановке
диафрагм
жёсткости)
закручиванием
здания пренебрегать нельзя. В
этом
случае
следует
объединять
горизонтальные
перемещения
на
уровне
перекрытия по рамам. Если
считать, что диск перекрытия не
деформируется
в
своей
плоскости, то возможно ещё и
объединение перемещений для
Рис 6.4. Моделирование сопряжения
колонны и закладной детали
всего перекрытия по повороту
относительно оси Z.
6.5. Моделирование податливости узлов
при сопряжении элементов
Необходимость учёта податливости может возникнуть при
соединении колонн с диафрагмами через закладные детали. В этом
случае рекомендуется использовать специальный КЭ типа 55. Для
этого колонна должна быть расчленена на элементы между
96
закладными деталями. Узлы, включающие закладные детали
колонны, должны иметь нумерацию, отличную от соответствующих
узлов диафрагмы. На рис. 6.4 показаны КЭ типа 55, моделирующие
работу закладных деталей. Так как матрица жёсткости КЭ типа 55 не
содержит его длину, то координаты узлов колонны и диафрагмы могут
совпадать (узлы 3 и 4, 7 и 8 и т. д.)
6.6. Моделирование шарниров в стержневых
и пластинчатых элементах
Под словом "шарнир" подразумевается освобождение от
связи между узлом схемы и входящим в этот узел концом
стержня или узлом конечного элемента. Допускается
освобождение связей в стержне по любому направлению. Это
могут быть и проскальзывания (ползуны) и собственно
шарниры. В стержнях задание шарниров производится с
помощью документа 2. Если стержень имеет шарниры с обоих
концов, то возможно смоделировать такой стержень, задав
соответствующую изгибную жёсткость равную нулю.
При задании шарниров в пластинчатых элементах
рекомендуется использовать следующий приём – в месте
задания шарнира произвести двойную нумерацию узлов КЭ
(один из узлов относится к одному, а другой – к другому
конечному элементу). Затем объединить соответствующие
линейные перемещения этих узлов.
Если в другом направлении шарнир отсутствует, то объединяются
также и угловые перемещения тех же узлов в этом направлении.
При необходимости описать в плите (рис. 6.5) шарнир
Рис. 6.5. Пример задания шарнира в плите
относительно оси Y – по линии узлов 4, 12, 20, 28, 36 делается
двойная нумерация узлов по этой линии (добавляются узлы 5, 13, 21,
29, 37, координаты которых могут совпадать с координатами узлов 4,
97
12,
20,
28,
36).
Попарно
объединяются (для узлов 4 и 5, 12
и 13 и т. д.) перемещения по
направлениям Z и UX.
Таким же образом поступают
при
шарнирном
креплении
элементов оболочки к стержню
(рис.6.6); отдельно нумеруются
узлы оболочки и стержня (та же
двойная нумерация), а затем
попарно
объединяются
Рис. 6.6. Пример задания шарнира
перемещения узлов 1 и 2, 8 и 9, 15
между оболочкой и ребром
и 16 и т. д. по направлениям X, Y и
Z.
6.7. Расчет на заданные перемещения
В ПК "МИРАЖ" и "Лира-Windows" включая версию 5.03, такой
расчёт производится при помощи введения в требуемый узел нульэлемента (КЭ 154), ориентированного по направлению заданного
перемещения и имеющего единичную длину. При этом нуль-элементу
назначается жёсткость вдоль его местной оси X1. Величину жёсткости
рекомендуется назначать не более чем в 10 100 раз большую, чем
максимальная погонная жёсткость входящих в перемещаемый узел
стержней или цилиндрическая жёсткость входящих в этот узел
пластин.
Нагрузка, моделирующая заданное перемещение, является
местной на нуль-элемент. Вид нагрузки 11, ориентация – вдоль
местных осей.
Если хотя бы в одном загружении предусматривается расчёт на
заданные перемещения по какому-либо направлению, то нельзя
накладывать связь по этому направлению. При не
параллельности нуль-элемента ни одной из осей координат –
связи по направлению заданного перемещения наложены не
будут.
Возможно задание перемещения вдоль и вокруг всех местных осей
нуль-элемента. В этом случае нуль-элементу должны быть заданы
жёсткости по соответствующим направлениям.
В "Лира-Windows" для расчёта на заданные перемещения нет
необходимости использовать КЭ №154. Для версий "Лира-Windows" 8
и старше использование КЭ №154 для этих целей не допускается.
Здесь для расчёта на заданное перемещение используются только
документы 6 и 7, причём, в документе 6 признак нагрузки принимается
98
60. Направление смещения узла и величина смещения задаются
аналогично заданию узловой силовой нагрузки.
6.8. Введение связей конечной жёсткости
Связь конечной жёсткости (или упруго-податливая связь)
применяется при моделировании упругого основания и любого
упругого опирания узлов расчётной схемы. КЭ типа 51, реализующий
такой тип связи, является одноузловым, ориентируется относительно
осей глобальной системы координат и имеет единичную длину.
Возможно, применение этого КЭ и в случае абсолютно
жёстких связей, совпадающих с осями глобальной системы
координат. При назначении жесткостей необходимо помнить,
что большие величины их могут ухудшить точность расчёта.
Поэтому обычно рекомендуется задавать жесткости на 1 … 2
порядка больше, чем погонные жесткости примыкающих
стержней или цилиндрические жесткости пластин. Вычисленные
в результате расчёта усилия в таких элементах облегчают
проверку глобального равновесия схемы.
6.9. Расчет на температурные воздействия
При расчёте на равномерный нагрев необходимо учитывать
требования соответствующих рекомендаций по расчёту сооружений
конкретного типа. При расчёте каркаса следует иметь в виду, что
задание температурного воздействия по всем элементам без учета
податливости соединений элементов, а также возможных поворотов
опор, может привести к чрезмерно завышенным усилиям, особенно в
защемлённых стойках.
При температурном воздействии более нагретые волокна
элемента оказываются сжатыми, а менее нагретые – растянутыми.
Частный случай, когда температура на противоположных
плоскостях симметричного сечения одинакова по величине и по знаку,
т. е. ТВТН вызывает только напряжения растяжения-сжатия, что
аналогично равномерному расширению волокон вдоль оси стержня.
Другой частный случай, когда температура на противоположных
плоскостях симметричного сечения одинакова и противоположна по
знаку, т.е. ТВ ТН, вызывает только изгибные напряжения.
В общем случае температура в какой-либо точке на расстоянии z
от срединной плоскости сечения высотой h (плоский изгиб):
Т = (ТВ + ТH) /2 + (ТH - ТВ) z/h.
Для крайних волокон (z=h/2) симметричного относительно оси Y
сечения:
Т = (ТВ + ТH) /2 + (ТH - ТВ) /2.
99
Первое слагаемое определяет часть температурного воздействия,
вызывающего равномерный нагрев сечения. Второе слагаемое
определяет
изгибные
усилия,
вызываемые
температурным
перепадом.
При расчёте несимметричных сечений не корректируется величина
изгибных напряжений от смещения оси X по высоте (ширине)
сечения.
Всё сказанное выше распространяется и на КЭ плит и оболочек.
6.10. Моделирование предварительного напряжения
Усилие предварительного обжатия может быть смоделировано как
температурное воздействие.
Зная величину предварительного напряжения, можно определить
необходимое укорочение стержня, а затем и необходимое
температурное воздействие на него. Но это справедливо лишь для
отдельного стержня.
Для всей конструкции в целом назначить величину температурного
воздействия Т и моделирующую величину его предварительного
напряжения NПН сразу не удаётся, так как податливость всех
элементов конструкции по заданному направлению ещё не известна.
Сперва нужно задаться
X2пн
X3пн
начальной
температурой
ТН
любой
величины,
выполнить
расчёт
конструкции
на
эту
температуру,
получить
X 1пн
величину
продольного
усилия
N
в
X 2пн
преднапрягаемом
Tн2 = Tн1--------элементе,
а
затем
X1пн
Tн3
окончательно
назначить
величину температурного
воздействия:
Tн1
Т
T3
T2
T1
Рис.6.7. Моделирование
предварительного
напряжения 100
•Тн.
Аналогично
решается
задача для случая, когда
преднапрягается
одновременно
несколько
стержней.
На рис.6.7.а показана
расчётная схема фермы,
где вводятся три разные
величины предварительного напряжения Х1ПН, Х2ПН, Х3ПН в трёх разных
стержнях.
При задании величины температурного воздействия для первого
стержня ТН1 эти величины для других стержней будут следующими:
2
•ТН1;
1
= 3 •ТН1.
1
ТН2 =
ТН3
Расчёт на заданные температурные воздействия (см.рис.6.7.б)
даёт усилия в стержнях соответственно N1, N2, N3. Эти усилия
противоположны по знаку усилиям предварительного напряжения.
После
определения
величины
1
1
окончательно
назначаются необходимые температурные воздействия в стержнях
13.
Т1=А•ТН1; Т2=А•ТН2; Т3= А•ТН3
и окончательно решается задача по схеме (см.рис.6.7.в), куда
добавляются и все другие необходимые загружения.
Усилия в преднапрягаемых стержнях от температурных
воздействий противоположны по знаку усилиям от предварительного
напряжения, поэтому расчёт на заданные температурные воздействия
рекомендуется выделять в отдельное загружение. Для остальных
элементов конструкции знаки усилий не изменяются.
Если необходимо произвести выбор расчётных сочетаний усилий,
рекомендуется:
загружения температурными воздействиями объявить как
постоянные;
выделить преднапрягаемые элементы в отдельный список для
выбора коэффициентов расчётных сочетаний;
для расчётных сочетаний по этому списку для загружения
температурным воздействием задать коэффициенты со знаком
минус, для остальных загружений коэффициенты не изменяются.
6.11. Учёт прямой и косой симметрии
Если рассчитываемая схема имеет плоскости симметрии, то для
уменьшения размерности задачи рекомендуется вводить в расчёт
часть схемы, ограниченную этими плоскостями.
На узлы, лежащие в плоскости прямой симметрии, накладываются
связи, ортогональные этой плоскости, а при косой симметрии –
101
параллельные ей. В табл. 6.11.1 показано, по каким направлениям
степеней свободы на эти узлы накладываются связи.
13.01 Таблица 6.11.1
Накладываемые связи для задания симметрии
Симметрия
прямая
Плоскости симметрии,
либо параллельные ей
XOZ
Накладываемые связи
Y,UX,UZ
XOY
косая
YOZ
Z,UX,UY X,UY,UZ
XOZ
XOY
YOZ
X,Z,UY
X,Y,UZ
Y,Z,UX
При наличии плоскости симметрии, не совпадающей с
направлением ни одной из плоскостей общей системы координат,
наложение соответствующих связей можно выполнить, например, с
помощью нуль-элементов или использовать локальную систему
координат.
На рис.6.8.а показана круговая оболочка с диагональными
Рис.6.8. Пример задания симметрии
ребрами, нагруженная равномерно распределенной нагрузкой.
Крестами показано расположение вертикальных опор. Используя
симметрию, можно рассчитывать 1/8 (заштрихованную) часть
конструкции.
Расположив одну плоскость симметрии параллельно плоскости
X0Z (рис.6.8.б.), необходимо наложить по узлам, попавшим в эту
плоскость, связи по направлениям Y, UX, UZ.
102
Во второй плоскости симметрии параллельными осям общей
системы координат будут лишь связи по направлению UZ; для
описания двух других связей нужно применять нуль-элементы.
Для этого, задавая только EF, расположить нуль-элементы
перпендикулярно плоскости симметрии (запретить перемещение,
перпендикулярное плоскости симметрии) и, задавая только Glкр,
расположить в тех же узлах нуль-элементы, параллельные плоскости
симметрии (запрещен поворот, перпендикулярный плоскости
симметрии).
Возможно введение только нуль-элементов перпендикулярных
плоскости симметрии если задать для них EF и EIy. Но тогда нульэлементом
будет
восприниматься
не
только
момент,
перпендикулярный плоскости симметрии, но и перерезывающая сила
по направлению оси Z. В таких случаях лучше применять КЭ типа 154,
где задаются независимые жесткостные характеристики для всех
шести направлений перемещений.
6.12. Расчет конструкций на упругом основании
6.12.1. Классическая модель основания Винклера
Классической расчетной механической моделью основания
Винклера является ряд не связанных между собой упругих пружин,
закрепленных на абсолютно жестком основании.
Штамп, приложенный к поверхности такой модели, при нагружении
вдавливается на глубину (S), пропорциональную среднему давлению
(P) и при снятии нагрузки возвращается в исходное положение.
Поверхность этой модели за пределами штампа не деформируется,
т.е. не учитывается работа грунта за пределами фундамента.
Механические свойства модели Винклера характеризуются
коэффициентом жесткости (постели) K1 (C1). По физическому смыслу
коэффициент жесткости означает величину усилия в тс, которое
необходимо приложить к 1 м2 поверхности основания, чтобы
последнее осело на 1 м. Размерность K1 (C1) – тс/м3.
Согласно гипотезе Винклера [7] коэффициент жесткости K1i в i той точке грунта равен отношению давления
ее осадке
Pi
на грунт в этой точке к
Si :
K1i
Pi
Si
Pi R .
,
(6.1)
Приведённое уравнение справедливо при условии, когда среднее
давление под подошвой фундамента (P) не превышает (R) –
расчетное сопротивление грунта для данного вида грунта и
103
фундамента. В противном случае (согласно [6; 7]) необходимо
использовать модели нелинейно-деформируемого основания или
снижать величину среднего давления (P), увеличивая размеры
площади фундаментов.
В классической постановке коэффициент постели модели
Винклера зависит только от вида грунта и принимается постоянным по
контактной площади основания и фундамента.
Для реализации модели Винклера могут быть использованы КЭ
51, 55, а также нуль элемент.
КЭ 51, 55 моделируют только основание в сочетании с
различными типами КЭ, моделирующими отдельно конструкции
плитных, ленточных, столбчатых, а также ростверков свайных
фундаментов. В некоторых случаях этот приём является единственно
возможным, например, для моделирования оснований столбчатых
фундаментов, а также для моделирования работы основания в
условиях совместного действия вертикальных и горизонтальных
нагрузок.
КЭ 11, 12 - моделируют основание и конструкции плитных
фундаментов при действии только вертикальной нагрузки.
КЭ 10 - моделирует основание и балочный ростверк без учёта
совместной работы основания и фундамента на сдвиг.
Определить EF можно по формуле:
EF(Z) = K1*F - по направлению оси Z (при вертикальной нагрузке);
где F - контактная площадь основания и фундамента.
Кроме того, эти значения могут быть использованы как исходные
данные для КЭ 10, если коэффициент постели постоянен по длине
элемента.
Примеры.
Фундаментная балка шириной подошвы Bф = 1 м, длиной Lф = 4 м
на упругом основании K1=1000 тс/м3, Pz=30 тс.
EF(Z)2-4 = K1•F = 1000•Bф•Lф/4 = 1000 тс,
EF(Z)1, 5 = EF(Z)2-4 /2 = 500 тс.
Классическая модель основания Винклера - КЭ 51 (рис.6.9):
5
2
2.5
1
5
3
5
4
ZY
X
Рис.6.9. Расчётная схема для "пр 1"
(0/1; пр 1 Балка на упругом основании/38; 0 2: 1 5/)
(1/51 1 1/ R 1 4/ 0 0 1/ 10 3 1 2/ R 1 3/ 0 0 1 1/)
(3/1 3 1E3/ 2 3 .5E3/ 3 1E5 1E4/)
104
2.5
5
Классическая модель основания Винклера - КЭ 55 (рис.6.10)
5
2.5
6
1
5
7
2
Z Y
5
8
3
9
4
2.5
10
5
Рис.6.10. Расчётная схема для "пр 2"
(0/1;X пр 2 Балка на упругом основании 38; 0 2: 1 5/)
(1/55 1 1 6/R 1 4/0 0 1 1/ 10 3 6 7/R 1 3/ 0 0 1 1/)
(3/ 1 0 0 1E3/ 2 0 0 5E2/ 3 1E5 1E4/)
Классическая модель основания Винклера - КЭ 10 (рис.6.11):
5
2
2.5
1
5
3
5
4
2.5
5
ZY
X
Рис.6.11. Расчётная схема для "пр 3"
(0/1; пр 3 Балка на упругом основании/ 2; 3/)
(1/10 1 1 2/ R 1 3/ 0 0 1 1/)
(3/1 1E5 1E4 CZ 1 1E3 0/)
6.12.2. Модель основания Пастернака
Модель основания Пастернака [8] характеризуется двумя
коэффициентами постели C1 (тс/м3), C2 (тс/м), описывающими только
вертикальные деформации (осадки - S) оснований и фундаментов.
Параметр C2 учитывает работу грунта за пределами фундамента. В
случае C2 = 0 модель Пастернака является аналогом модели
Винклера.
Основным ограничением по практическому применению модели
Пастернака
является
трудоёмкость
способов
определения
коэффициентов постели C1, C2. Теоретически параметры C1, C2 могут
быть получены только для одного или для двух слоев основания.
1. Ленточный и плитный фундаменты на однослойном основании:
C1
E1
h1 1 12
(6.2)
105
;
C2
E1 h1
.
61 1
(6.3)
2. Ленточный фундамент на двухслойном основании:
C1
C2
1
E1
E2
h1 1 12 h2 1 22
;
(6.4)
E1 h1
1
E2 h2
2
.
3
3
1
1
2
1 2
61 1 1 1
(6.5)
3. Плитный фундамент на двухслойном основании:
C1
1
h1
h
1 2 12 2 1 2 22
E1
E2
;
(6.6)
C2
E1 h1
1
E2 h2
2
.
3
3
2
2
2
1 2
61 2 1 1
(6.7)
где E1, v1, h1, E2, v2, h2, - соответственно модуль деформаций,
коэффициент Пуассона и толщина первого и второго слоев
сжимаемой толщи грунтового основания.
(6. 8)
E 1 h
.
E 1 h
E2 1 12 h1
;
1
2
E1 1 2 h2
2
1
2
2
2
2
1
1
2
(6.9)
Для реализации модели Пастернака в зависимости от
конструкции фундамента можно использовать КЭ 10 – для
моделирования балочного ростверка с учётом работы основания за
пределами фундамента (С1 и С2 постоянны по длине стержня).
106
Пример: Модель основания Пастернака - КЭ 10 (рис.6.12):
5
2
2.5
1
5
3
Рис.6.12. Расчётная
схема для "пр 4"
5
2.5
4
5
ZY
X
(0/1; пр 4 Балка на упругом основании/ 2; 3/)
(1/10 1 1 2/ R 1 3/ 0 0 1 1/)
(3/1 1E5 1E4 CZ 1 1E3 2E2/)
6.12.3. Модифицированная модель основания Винклера
Модифицированная модель основания Винклера является
универсальной, снимает все выше приведённые ограничения
классических моделей основания и в общем случае характеризуется
двумя параметрами [9].
K1 - коэффициент жесткости линейно-деформируемого основания
при сжатии при действии вертикальной нагрузки (тс/м3);
K2 - коэффициент жесткости линейно-деформируемого основания
при сдвиге при действии горизонтальной нагрузки (тс/м3).
Здесь в понятие коэффициента жесткости K1 вкладывается другой
смысл по сравнению с аналогичным параметром C1 классической
модели Винклера. В данном случае K1 учитывает не только вид грунта
(единственный фактор, который как отмечалось выше, характеризует
классическую модель Винклера), но и такие важнейшие факторы, как
форма и размеры фундаментов, переменные свойства грунтов по
глубине основания и в плане сооружения, работу грунта за пределами
фундамента.
Кроме того, модифицированная модель Винклера позволяет с
помощью параметра K2 учитывать совместные горизонтальные
деформации оснований и фундаментов при действии горизонтальных
нагрузок.
Учитывая
приближенность
исходных
данных
по
определению деформаций основания при действии горизонтальной
нагрузки, рекомендуется принимать К2 = 0.7•К1.
Коэффициент жесткости K1 вычисляется по формуле (6.1), исходя
из ожидаемых (предварительно вычисленных) осадок поверхности
основания (S).
Нормы [6] рекомендуют для расчёта осадки (S) метод послойного
суммирования с применением расчётной схемы основания в
виде линейно-деформируемого полупространства или слоя
конечной толщины с учетом формы и размеров фундаментов,
свойств грунта на глубине.
107
Полученные значения коэффициентов жесткости (постели) K1, K2
могут использоваться в качестве исходных данных для КЭ 51, 55 при
определении жесткостных характеристик EF по формулам:
EF(Z) = K1•F - по направлению оси Z (при вертикальной нагрузке);
EF(X) = K2•F - по направлению оси X (при горизонтальной нагрузке);
EF(Y) = K2*F - по направлению оси Y (при горизонтальной нагрузке),
где F - контактная площадь основания и фундамента.
Примеры:
Фундаментная балка шириной подошвы BФ = 1 м, длиной LФ = 4 м
на упругом основании K1=1000 тс/м3, K2=700 тс/м3, PZ=30 тс.
EF(Z)2-4 = K1•F = 1000•BФ•LФ / 4 = 1000 тс;
EF(X)2-4 =0.7•EF(Z)2-4 = 700 тс;
EF(Z)1, 5 = EF(Z)2-4 / 2 = 500 тс; EF(X)1, 5 = EF(X)2-4 / 2 = 350 тс.
Модифицированная модель основания Винклера - КЭ
(рис.6.13): (без учета работы грунта за пределами фундамента)
5
2
2.5
1
5
3
5
4
51
2.5
5 Nx
ZY
X
Рис.6.13. Расчётная схема для "пр 5"
(0/1; пр 5 Балка на упругом основании/ 38; 0 3: 1 5; 0 4: 1 5/)
(1/51 1 1/R 1 4/0 0 1/ R 5 1/ 0 1/ 10 5 1 2/R 1 3/0 0 1 1/)
(3/1 3 1E3/2 1 7E2/ 3 3 5E2/4 1 350/ 5 1E5 1E4/)
Модифицированная модель основания Винклера - КЭ
(рис.6.14):(без учета работы грунта за пределами фундамента)
5
2.5
6
1
5
7
2
5
8
3
9
4
2.5
10 Nx
5
Z Y
X
Рис.6.14. Расчётная схема для "пр 6"
(0/1; пр 6 Балка на упругом основании/ 38; 0 2: 1 5/)
(1/55 1 1 6/R 1 4/0 0 1 1/ 10 3 6 7/R 1 3/ 0 0 1 1/)
(3/1 7E2 0 1E3/ 2 350 0 5E2/ 3 1E5 1E4/).
6.13. Расчет плит и оболочек, подкреплённых рёбрами
108
55
При расчёте оболочек и плит, подкреплённых рёбрами, всегда
возникает проблема – какая часть плиты или оболочки включается в
работу ребра, т.е. при моделировании ребра как стержня таврового
сечения возникает вопрос о ширине полки. Имеется рекомендация,
чтобы каждый свес полки не превышал 6h (см. рис.6.15.а.)
Эта рекомендация в ряде случаев является не корректной, т.к.
предполагает равномерное включение плиты на участке 12h в работу
ребра. В действительности распределение мембранных усилий в
плите подкреплённых рёбрами имеет вид рис.6.15.б. C решение в
замкнутом виде данной конструкции можно ознакомиться, например, в
[10].
Плита (оболочка) моделируются оболочечными элементами (типа
41, 42, 44) способными воспринимать мембранную группу усилий.
Расчётные узлы располагаются в срединной поверхности плиты или
оболочки. Между рёбрами в плане необходимо иметь несколько узлов
(см.рис.6.15.в), чтобы смоделировать неравномерное распределение
мембранных усилий в плите (оболочке) параллельных рёбрам,
подкрепляющим данную плиту (оболочку).
Рёбра моделируются стержнями общего вида (КЭ типа 5 или 10),
которые имеют сечение b hР и подвешены на абсолютно жёстких
вставках к смежным узлам плиты (оболочки).
а)
7. ПРИМЕРЫ
В этой главе рассмотрены 12 простых примеров расчёта
строительных конструкций при помощи ПК "МИРАЖ" и "ЛИРАWindows". Текстовые файлы с исходными данными снабжены
необходимыми комментариями, поясняющие процесс формирования
задания на расчёт. У программистов считается хорошим стилем
программирования
– наличие структурированного и снабженного
б)
подробными комментариями исходного текста программы. Создание
задания на расчёт на входном языке ПК процесс схожий с
программированием, поэтому рекомендуется текст исходных данных
снабжать подробными пояснениями, а также структурировать текст
так, чтобы можно было мгновенно найти тот или иной блок в задании и
определить его назначение.
При выполнении больших серий расчётов это просто необходимо
ввиду огромного
количества файлов и можно легко запутаться в своих
в)
же исходных данных. Ну а если в проектной группе занимаются
автоматизацией расчётов несколько инженеров, то в этом случае
также необходимы комментарии к текстам исходных данных даже
может быть более подробные, чем составленных "для себя", в силу
109
того, что логика мышления вашего коллеги может быть отлична от
вашей.
Кроме текстов исходных данных в примерах приводятся
фрагменты таблиц с результатами расчёта, а также часть выдаваемой
ПК графической информации (деформированные схемы, эпюры
усилий и др.).
Все примеры просчитаны на ПК "Мираж" и "ЛИРА-Windows", в
случае отличия расчёта на ПК "Мираж" и "ЛИРА-Windows" по тексту
оговаривается, на каком ПК выполнен расчёт.
Примечание: В виду того, что понятие массы в рассматриваемых
примерах не используется, поэтому для сокращения, нами
использовалась единица измерения силы (веса) – тонна, вместо –
тонны силы.
7.1. Расчёт балки
Определить напряженно деформированное состояние балки,
представленной на рис. 7.1.1.
Построить эпюры усилий и определить линейные перемещения
консоли. На рис 7.1.2. показаны типы поперечных сечений балки.
Модуль упругости материала Е=2700000 т/м2.
Конечно-элементная расчётная схема балки представлена на
рис.7.1.3.
q z = 2.2 т/м 2
M к = 1.5 тм
M у = 3.8 тм
P=1т
3
3
1
3
2
3
2
Рис. 7.1.1. Расчётная схема. Цифрами в квадратах
обозначены номера типов жесткостей.
110
3
3
Тип 1
Тип 2
Тип 3
Загру жение 1
b=20 см, h=30 см
см, d=20 см
b=5 см, h=30 см,
D=30
b1=30 см, h1=5 см
Рис.7.1.2. Поперечные сечения
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
Рис. 7.1.3. Конечно-элементная схема
Ниже приведены исходные данные для расчёта с необходимыми
X
комментариями.
Z
Y
(0/
1;ПРИМЕР-1/
2; 5/
)
(1/
10 1 1 2/
R 1 5/
0 0 1 1/
10 2 7 8/
R 1 4/
0 0 1 1/
10 3 12 13/
R 1 5/
0 0 1 1/
)
(2/
3 2 5/
)
(3/
1 S0 2700000 20 30/
2 S2 2700000 5 30 30 5/
3 S6 2700000 30 20/
)
(4/
0 0 0/
R 1 17/
1 0 0/
)
(5/
1 1 2 3 4 5 6/
7 2 3/
12 2 3/
)
(6/
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
Открыть документ 0 "Заглавный" */
Шифр задачи "ПРИМЕР-1"
*/
Признак схемы - 5 [общий вид] */
Закрыть документ 0
*/
Открыть документ 1 "Элементы" */
Задание 1-го КЭ №10 [стержень] */
тип жесткости 1
*/
Повторить одну строку 5 раз
*/
шаг повторения 0 0 1 1
*/
Задание 7-го КЭ №10 [стержень] */
тип жесткости 2
*/
Повторить одну строку 4 раза
*/
шаг повторения 0 0 1 1
*/
Задание 12-го КЭ №10 [стержень]*/
Повторить одну строку 5 раз
*/
шаг повторения 0 0 1 1
*/
Закрыть документ 1
*/
Открыть документ 2 "Шарниры"
*/
Задать шарнир в конце 3-го
*/
элемента относително оси Y
*/
Закрытие документа 2
*/
Открыть документ 3 "Жесткости" */
Тип жесткости 1 [прямоугольник]*/
Тип жесткости 2 [тавр полка
*/
с верху]
*/
Тип жесткости 3 [труба]
*/
Закрыть документ 3
*/
Открыть документ 4 "Координаты"*/
Задание координат 1-го узла
*/
Повторить одну строку 17 раз
*/
шаг повторения - 1 м по оси X */
Закрыть документ 4
*/
Открыть документ 5 "Связи"
*/
Запретить перемещения узла 1
*/
Наложить связи по Y и Z узла 7 */
Наложить связи по Y и Z узла 12*/
Закрыть документ 5
*/
Открыть документ 6 "Нагрузки" */
111
1 6 3 1 1/
2 6 3 1 1/
3 6 3 1 1/
9 0 5 2 1/
15 0 2 3 1/
18 0 4 4 1/
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
)
(7/
1 2.2/
Загру жение
1
2 3.8/
3 -1/
4 1.5/
)
Задать равномерно распределён- */
ную нагрузку по направлению Z */
для стержней 1, 2 и 3
*/
Момент в узле 9 относительно Y */
Сила в узле 15 по направлению Y*/
Момент в узле 18 относительно X*/
Закрыть документ 6
*/
Открыть документ 7 "Величины
*/
нагрузок"
*/
Значение первой нагрузки
*/
Значение второй нагрузки и т.д.*/
знак "-" указывает, что сила
*/
действует по направлению оси
*/
Закрыть документ 7
*/
В результате расчёта получены деформированная схема и эпюры усилий:
Загру жение 1
Эпюра Mk
Единицы измерения - т*м
14.
1
2
3
4
5
Загру жение 1
Эпюра Qy
Единицы измерения - т
Z
1
2
6
7
9 10
11
12 13
14 15
16
17
15
16
Рис. 7.1.4. Деформированная схема
3
4
5
6
7
8
9
10
11
12
13
14
17
Y
Загру жение 1
Эпюра Mz X
Единицы измерения - т*м
1
2
Рис. 7.1.5. Эпюра МX (МX=1.5 т*м)
3
4
5
6
Загру жение 1
Эпюра Qz
Единицы измерения - т
Z
8
7
8
9
10
11
12
13
14
15
16
17
13
14
15
16
17
13
14
15
16
17
13
14
15
16
17
Рис. 7.1.6. Эпюра QY (QY,max=1 т)
Y
X
1
2
Максимальное у силие 1.5
3
4
5
Загру жение 1
Эпюра My
Единицы измерения - т*м
Z
6
7
8
9
10
11
12
Рис. 7.1.7. Эпюра МZ (МZ,max=3 т*м)
Y
X
1
2
3
Минимальное у силие -1
Максимальное у силие 0.797579
4
5
6
7
8
9
10
11
12
Рис. 7.1.8. Эпюра QZ (QZ,max=6.2 т)
Z
Y
X
1
2
3
Минимальное у силие -3
Максимальное у силие 0.987893
4
5
6
7
8
9
10
11
12
Рис. 7.1.9. Эпюра МY (МY,max=8.6 т*м)
Z
Y
14.01
X Таблица 7.1.1
Минимальное у силие -0.42786
Максимальное у силие 6.17214
(a) Перемещения узлов
Z-------------------------------------------------------------------------------Y
|
2
3
4
5
6
7
8
9
10
|
X
-------------------------------------------------------------------------------| Y
0.3811 1.2196 2.0581 2.4392 1.9056
-3.9048 -8.4216 -10.985 |
| Z
-2.7746 -8.6172 -15.164 -9.6398 -4.4677
3.2089 5.9719 6.8129 |
| UX
-2.8409 -5.6818 -8.5227 -11.363 -14.204 -17.045 -73.280 -129.51 -185.75 |
| UY
4.8535 6.4377 -5.5828 -5.4068 -4.8785 -3.9982 -2.7027 -3.1063 1.1411 |
| UZ
0.6860 0.9147 0.6860
-1.1433 -2.7441 -4.6381 -3.9679 -0.7333 |
-------------------------------------------------------------------------------|
11
12
13
14
15
16
17
18
|
Минимальное у силие -8.61642
Максимальное у силие 0.749853
112
-------------------------------------------------------------------------------| Y
-9.0334
14.948 32.175 50.542 69.099 87.656 106.21
|
| Z
4.2559
-4.5391 -9.0782 -13.617 -18.156 -22.695 -27.234
|
| UX
-241.98 -298.22 -300.35 -302.49 -304.63 -306.76 -308.90 -311.04
|
| UY
3.6896 4.5391 4.5391 4.5391 4.5391 4.5391 4.5391 4.5391
|
| UZ
5.0655 13.428 16.277 17.987 18.557 18.557 18.557 18.557
|
--------------------------------------------------------------------------------
14.02 Примечание:
Y и Z;
линейные перемещения узлов (в мм) по направлениям углы поворота (в 1000 радиан) вокруг осей X, Y и Z.
Перемещение консоли (узел №18): по ΔY,18 = – 27.557 мм, по
ΔZ,18 = 106.21 мм.
14.03
14.04 Таблица 7.1.2
(a) Усилия в элементах
-------------------------------------------------------------------------------| 10_
1-1
1-2
2-1
2-2
3-1
3-2
4-1
4-2
5-1 |
|
1
1
2
2
3
3
4
4
5
|
|
2
2
3
3
4
4
5
5
6
|
-------------------------------------------------------------------------------| MK
1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 |
| MY
-8.6164 -3.5442 -3.5442 -0.6721 -0.6721
-0.4278 -0.4278 |
| QZ
6.1721 3.9721 3.9721 1.7721 1.7721 -0.4278 -0.4278 -0.4278 -0.4278 |
| MZ
-0.4939 -0.2469 -0.2469
0.2469 0.2469 0.4939 0.4939 |
| QY
-0.2469 -0.2469 -0.2469 -0.2469 -0.2469 -0.2469 -0.2469 -0.2469 -0.2469 |
-------------------------------------------------------------------------------| 10_
5-2
6-1
6-2
7-1
7-2
8-1
8-2
9-1
9-2 |
|
5
6
6
7
7
8
8
9
9
|
|
6
7
7
8
8
9
9
10
10
|
--------------------------------------------------------------------------------
продолжение табл.7.1.2
-------------------------------------------------------------------------------| MK
1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 |
| MY
-0.8557 -0.8557 -1.2835 -1.2835 -0.2668 -0.2668 0.7498 -3.0501 -2.0334 |
| QZ
-0.4278 -0.4278 -0.4278 1.0167 1.0167 1.0167 1.0167 1.0167 1.0167 |
| MZ
0.7409 0.7409 0.9878 0.9878 0.1903 0.1903 -0.6072 -0.6072 -1.4048 |
| QY
-0.2469 -0.2469 -0.2469 0.7975 0.7975 0.7975 0.7975 0.7975 0.7975 |
-------------------------------------------------------------------------------| 10_
10-1
10-2
11-1
11-2
12-1
12-2
13-1
13-2
14-1 |
|
10
10
11
11
12
12
13
13
14
|
|
11
11
12
12
13
13
14
14
15
|
-------------------------------------------------------------------------------| MK
1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 |
| MY
-2.0334 -1.0167 -1.0167
|
| QZ
1.0167 1.0167 1.0167 1.0167
|
| MZ
-1.4048 -2.2024 -2.2024 -3.0000 -3.0000 -2.0000 -2.0000 -1.0000 -1.0000 |
| QY
0.7975 0.7975 0.7975 0.7975 -1.0000 -1.0000 -1.0000 -1.0000 -1.0000 |
-------------------------------------------------------------------------------| 10_
14-2
15-1
15-2
16-1
16-2
17-1
17-2
|
|
14
15
15
16
16
17
17
|
|
15
16
16
17
17
18
18
|
-------------------------------------------------------------------------------| MK
1.5000 1.5000 1.5000 1.5000 1.5000 1.5000 1.5000
|
| QY
-1.0000
|
--------------------------------------------------------------------------------
14.05 Примечание:
тоннах).
изгибающие моменты (в т*м); перерезывающие силы (в
Обозначения элементов: 1-1 – первый элемент, начало; 1-2 – первый
элемент, конец и т.д. Под обозначениями элементов указаны номера узлов, в
пределах которых находится элемент.
7.2. Расчёт перекрёстной балочной системы
на упругом основании
113
В перекрёстной системе балок на упругом основании,
представленной на рис. 7.2.1. Система по углам загружена
сосредоточенной нагрузкой Р=85 т и равномерно распределённой
нагрузкой q=32 т/м – по внутренним балкам.
P = 85 т
P = 85 т
3
6
P = 85 т
P = 85 т
5
6
C z = 1550 т/м
q z = 32 т/м
5
Рис. 7.2.1. Расчётная схема
Определить
перемещения
углов и изгибающие моменты МY.
На
рис
7.2.2.
показано
поперечное
сечение
балок.
Модуль упругости материала
балок Е=2700000 т/м2. Правила
задания
жесткостных
характеристик см. п.2.6.
Для
моделирования
основания используем модель
Винклера (см. п.6.12.1). Примем
b=2 см, h=30 см b1=30 см, h1=5 см.
коэффициент
постели
Рис.7.2.2. Поперечное сечение балок
(жесткости) основания СZ=1550
т/м3.)
Конечно-элементная расчётная схема перекрёстной балочной
системы показана на рис. 7.2.3.
Загру жение 1
33
32
31
30
29
34
26
25
21
20
60
38
19
59
46
47
48
40
49
114
18
50
51
52
53
58
57
23
22
61
37
45
24
62
36
41
27
63
35
39
28
17
16
15
Рис. 7.2.3. Конечно-элементная схема
Ниже приведен текст исходных данных для расчёта
комментариями, поясняющими процесс задания исходных данных.
(0/
1;ПРИМЕР-2/
2; 5/
)
(1/
10 1 1 2/
R 1 42/
0 0 1 1/
10 1 1 44/
10 1 39 45/
10 1 45 46/
R 1 7/
0 0 1 1/
10 1 53 17/
10 1 6 54/
10 1 54 55/
R 1 3/
0 0 1 1/
10 1 58 49/
10 1 49 59/
10 1 59 60/
R 1 3/
0 0 1 1/
10 1 63 28/
)
(3/
1 S1 2700000 5 30 30 5/
0 CZ 0.3 1550/
)
(4/
0 0 0/
R 1 10/
1 0 0/
R 1 12/
0 1 0/
R 1 10/
-1 0 0/
R 1 11/
0 -1 0/
R 9 1 2/
)
(5/
1 1 2/
11 2/
)
0 6
5
R
0
5
R
0
0/
1 0/
1 4/
1 0/
7 0/
1 4/
1 0/
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
Открыть документ 0 "Заглавный" */
Шифр задачи "ПРИМЕР-2"
*/
Признак схемы - 5 [общий вид] */
Закрыть документ 0
*/
Открыть документ 1 "Элементы" */
Задание 1-го КЭ №10 [стержень] */
тип жесткости 1
*/
Повторить одну строку 42 раза */
шаг повторения 0 0 1 1
*/
Задание 44-го КЭ №10 [стержень]*/
Задание 45-го КЭ №10 [стержень]*/
Задание 46-го КЭ №10 [стержень]*/
Повторить одну строку 7 раз
*/
шаг повторения 0 0 1 1
*/
Задание 54-го КЭ №10 [стержень]*/
Задание 55-го КЭ №10 [стержень]*/
Задание 56-го КЭ №10 [стержень]*/
Повторить одну строку 3 раза
*/
шаг повторения 0 0 1 1
*/
Задание 60-го КЭ №10 [стержень]*/
Задание 61-го КЭ №10 [стержень]*/
Задание 62-го КЭ №10 [стержень]*/
Повторить одну строку 3 раза
*/
шаг повторения 0 0 1 1
*/
Задание 66-го КЭ №10 [стержень]*/
Закрыть документ 1
*/
Открыть документ 3 "Жесткости" */
Тип жесткости 1 [тавр полка
*/
с низу]
*/
ширина балки 0.3 м коэффициент */
постели С=1550 в направлении Z */
Закрыть документ 3
*/
Открыть документ 4 "Координаты"*/
Задание координат 1-го узла
*/
Повторить одну строку 10 раз
*/
шаг повторения 1 м по оси X
*/
Повторить одну строку 12 раз
*/
шаг повторения 1 м по оси Y
*/
Повторить одну строку 10 раз
*/
шаг повторения -1 м по оси X */
Повторить одну строку 12 раз
*/
шаг повторения -1 м по оси Y */
Повторить 9 строк 1 раз
*/
начиная со второй
*/
шаг повторения - 6 м по оси Y */
Задание координат 54-го узла
*/
Повторить одну строку 4 раза
*/
шаг повторения 1 м по оси Y
*/
Задание координат 59-го узла
*/
Повторить одну строку 4 раза
*/
шаг повторения 1 м по оси Y
*/
Закрыть документ 4
*/
Открыть документ 5 "Связи"
*/
Наложить связи по X и Y узла 1 */
Наложить связь по Y на узел 11 */
Закрыть документ 5
*/
115
с
(6/
45 16 3 1 1/
R 1 21/
1 0 0 0 0/
1 0 3 2 1/
11 0 3 2 1/
23 0 3 2 1/
33 0 3 2 1/
)
(7/
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
1 32/
2 85/
)
Открыть документ 6 "Нагрузки" */
Задать равномерно распределён- */
ную нагрузку по направлению Z */
для элементов с 45-го по 66-й */
Сила в узле 1 по направлению Z*/
Сила в узле 11 по направлению Z*/
Сила в узле 23 по направлению Z*/
Сила в узле 33 по направлению Z*/
Закрыть документ 6
*/
Открыть документ 7 "Величины
*/
нагрузок"
*/
Значение первой нагрузки
*/
Значение второй нагрузки
*/
Закрыть документ 7
*/
В результате расчёта получены деформированная схема и эпюры усилий:
15.
Загру жение 1
33
32
31
30
29
28
34
35
37
21
19
46
47
48
49
18
50
51
52
53
58
41
42
15
56
43
14
55
44
13
54
4
5
6
17
16
57
3
23
20
60
45
24
22
59
40
2
25
61
38
1
26
62
36
39
27
63
12
7
8
9
10
11
Рис. 7.2.4. Деформированная схема
Z
Y
X
Загру жение 1
Эпюра My
Единицы измерения - т*м
33
32
31
30
29
34
46
47
48
49
40
20
19
18
50
51
52
15
56
43
14
55
44
13
54
Минимальное у силие -20.7112
Максимальное у силие 10.0166
3
4
5
6
12
7
8
9
10
11
Рис. 7.2.5. Эпюра МY (МY,max=10.02 т*м; МY,min= – 20.71 т*м)
15.01 Таблица 7.2.1
(a) Перемещения узлов
116
17
16
57
42
2
53
58
41
1
21
59
45
24
23
22
60
38
X
25
61
37
Y
26
62
36
Z
27
63
35
39
28
-------------------------------------------------------------------------------|
1
2
3
4
5
6
7
8
9
|
-------------------------------------------------------------------------------| Z
-118.13 -48.591 -9.5175 1.3324 -2.7249 -7.4784 -2.7249 1.3324 -9.5175 |
| UX
77.790 47.675 23.932 3.3888 -16.702 -39.025 -16.702 3.3888 23.932 |
| UY
-77.392 -55.997 -23.032 -1.0317 6.8262
-6.8262 1.0317 23.032 |
--------------------------------------------------------------------------------
продолжение табл.7.2.1
-------------------------------------------------------------------------------|
10
11
12
13
14
15
16
17
18
|
-------------------------------------------------------------------------------| Z
-48.591 -118.13 -48.027 -7.7109 5.0938 2.2378 -6.3646 -11.797 -6.3646 |
| UX
47.675 77.790 56.828 24.708 3.0460 -7.1395 -8.6883
8.6883 |
| UY
55.997 77.392 49.964 29.214 12.369 -2.8225 -18.391 -36.418 -18.391 |
-------------------------------------------------------------------------------|
19
20
21
22
23
24
25
26
27
|
-------------------------------------------------------------------------------| Z
2.2378 5.0938 -7.7109 -48.027 -118.13 -48.591 -9.5175 1.3324 -2.7249 |
| UX
7.1395 -3.0460 -24.708 -56.828 -77.790 -47.675 -23.932 -3.3888 16.702 |
| UY
-2.8225 12.369 29.214 49.964 77.392 55.997 23.032 1.0317 -6.8262 |
-------------------------------------------------------------------------------|
28
29
30
31
32
33
34
35
36
|
-------------------------------------------------------------------------------| Z
-7.4784 -2.7249 1.3324 -9.5175 -48.591 -118.13 -48.027 -7.7109 5.0938 |
| UX
39.025 16.702 -3.3888 -23.932 -47.675 -77.790 -56.828 -24.708 -3.0460 |
| UY
6.8262 -1.0317 -23.032 -55.997 -77.392 -49.964 -29.214 -12.369 |
-------------------------------------------------------------------------------|
37
38
39
40
41
42
43
44
45
|
-------------------------------------------------------------------------------| Z
2.2378 -6.3646 -11.797 -6.3646 2.2378 5.0938 -7.7109 -48.027 -44.951 |
| UX
7.1395 8.6883
-8.6883 -7.1395 3.0460 24.708 56.828
|
| UY
2.8225 18.391 36.418 18.391 2.8225 -12.369 -29.214 -49.964 27.119 |
-------------------------------------------------------------------------------|
46
47
48
49
50
51
52
53
54
|
-------------------------------------------------------------------------------| Z
-64.417 -71.393 -72.122 -71.651 -72.122 -71.393 -64.417 -44.951 -43.101 |
| UX
-29.225 |
| UY
12.265 2.8195 -0.5091
0.5091 -2.8195 -12.265 -27.119
|
-------------------------------------------------------------------------------|
55
56
57
58
59
60
61
62
63
|
-------------------------------------------------------------------------------| Z
-64.161 -71.867 -72.782 -71.976 -71.976 -72.782 -71.867 -64.161 -43.101 |
| UX
-13.370 -3.2373 0.5487 0.7072 -0.7072 -0.5487 3.2373 13.370 29.225 |
--------------------------------------------------------------------------------
Максимальное вертикальное перемещение данной балочной
системы имеем в узлах №1, 11, 23 и 33. ΔZ,max= – 118.13 мм.
15.02
15.03 Таблица 7.2.2
(a) Усилия в элементах
-------------------------------------------------------------------------------| 10_
1-1
1-2
2-1
2-2
3-1
3-2
4-1
4-2
5-1 |
|
1
1
2
2
3
3
4
4
5
|
|
2
2
3
3
4
4
5
5
6
|
-------------------------------------------------------------------------------| MK
0.9214 0.7026 0.7026 0.5777 0.5777 0.5301 0.5301 0.5533 0.5533 |
| MY
0.8506 -20.161 -20.161 -17.296 -17.296 -8.8884 -8.8884 -0.5233 -0.5233 |
| QZ
-42.696 -4.7616 -4.7616 7.4712 7.4712 8.5217 8.5217 8.5410 8.5410 |
-------------------------------------------------------------------------------| 10_
5-2
6-1
6-2
7-1
7-2
8-1
8-2
9-1
9-2 |
|
5
6
6
7
7
8
8
9
9
|
|
6
7
7
8
8
9
9
10
10
|
-------------------------------------------------------------------------------| MK
0.6505 -0.6505 -0.5533 -0.5533 -0.5301 -0.5301 -0.5777 -0.5777 -0.7026 |
| MY
9.1415 9.1415 -0.5233 -0.5233 -8.8884 -8.8884 -17.296 -17.296 -20.161 |
| QZ
11.177 -11.177 -8.5410 -8.5410 -8.5217 -8.5217 -7.4712 -7.4712 4.7616 |
-------------------------------------------------------------------------------| 10_
10-1
10-2
11-1
11-2
12-1
12-2
13-1
13-2
14-1 |
|
10
10
11
11
12
12
13
13
14
|
|
11
11
12
12
13
13
14
14
15
|
-------------------------------------------------------------------------------| MK
-0.7026 -0.9214 0.8506 0.6285 0.6285 0.4904 0.4904 0.4179 0.4179 |
| MY
-20.161 0.8506 0.9214 -19.732 -19.732 -16.798 -16.798 -9.1942 -9.1942 |
117
| QZ
4.7616 42.696 -42.303 -4.4821 -4.4821 7.2323 7.2323 7.0013 7.0013 |
-------------------------------------------------------------------------------| 10_
14-2
15-1
15-2
16-1
16-2
17-1
17-2
18-1
18-2 |
|
14
15
15
16
16
17
17
18
18
|
|
15
16
16
17
17
18
18
19
19
|
--------------------------------------------------------------------------------
продолжение табл.7.2.2
-------------------------------------------------------------------------------| MK
0.4013 0.4013 0.4383 0.4383 0.5338 -0.5338 -0.4383 -0.4383 -0.4013 |
| MY
-3.3594 -3.3594 1.6537 1.6537 9.5159 9.5159 1.6537 1.6537 -3.3594 |
| QZ
4.9020 4.9020 5.8015 5.8015 10.360 -10.360 -5.8015 -5.8015 -4.9020 |
-------------------------------------------------------------------------------| 10_
19-1
19-2
20-1
20-2
21-1
21-2
22-1
22-2
23-1 |
|
19
19
20
20
21
21
22
22
23
|
|
20
20
21
21
22
22
23
23
24
|
-------------------------------------------------------------------------------| MK
-0.4013 -0.4179 -0.4179 -0.4904 -0.4904 -0.6285 -0.6285 -0.8506 0.9214 |
| MY
-3.3594 -9.1942 -9.1942 -16.798 -16.798 -19.732 -19.732 0.9214 0.8506 |
| QZ
-4.9020 -7.0013 -7.0013 -7.2323 -7.2323 4.4821 4.4821 42.303 -42.696 |
-------------------------------------------------------------------------------| 10_
23-2
24-1
24-2
25-1
25-2
26-1
26-2
27-1
27-2 |
|
23
24
24
25
25
26
26
27
27
|
|
24
25
25
26
26
27
27
28
28
|
-------------------------------------------------------------------------------| MK
0.7026 0.7026 0.5777 0.5777 0.5301 0.5301 0.5533 0.5533 0.6505 |
| MY
-20.161 -20.161 -17.296 -17.296 -8.8884 -8.8884 -0.5233 -0.5233 9.1415 |
| QZ
-4.7616 -4.7616 7.4712 7.4712 8.5217 8.5217 8.5410 8.5410 11.177 |
-------------------------------------------------------------------------------| 10_
28-1
28-2
29-1
29-2
30-1
30-2
31-1
31-2
32-1 |
|
28
28
29
29
30
30
31
31
32
|
|
29
29
30
30
31
31
32
32
33
|
-------------------------------------------------------------------------------| MK
-0.6505 -0.5533 -0.5533 -0.5301 -0.5301 -0.5777 -0.5777 -0.7026 -0.7026 |
| MY
9.1415 -0.5233 -0.5233 -8.8884 -8.8884 -17.296 -17.296 -20.161 -20.161 |
| QZ
-11.177 -8.5410 -8.5410 -8.5217 -8.5217 -7.4712 -7.4712 4.7616 4.7616 |
-------------------------------------------------------------------------------| 10_
32-2
33-1
33-2
34-1
34-2
35-1
35-2
36-1
36-2 |
|
32
33
33
34
34
35
35
36
36
|
|
33
34
34
35
35
36
36
37
37
|
-------------------------------------------------------------------------------| MK
-0.9214 0.8506 0.6285 0.6285 0.4904 0.4904 0.4179 0.4179 0.4013 |
| MY
0.8506 0.9214 -19.732 -19.732 -16.798 -16.798 -9.1942 -9.1942 -3.3594 |
| QZ
42.696 -42.303 -4.4821 -4.4821 7.2323 7.2323 7.0013 7.0013 4.9020 |
-------------------------------------------------------------------------------| 10_
37-1
37-2
38-1
38-2
39-1
39-2
40-1
40-2
41-1 |
|
37
37
38
38
39
39
40
40
41
|
|
38
38
39
39
40
40
41
41
42
|
-------------------------------------------------------------------------------| MK
0.4013 0.4383 0.4383 0.5338 -0.5338 -0.4383 -0.4383 -0.4013 -0.4013 |
| MY
-3.3594 1.6537 1.6537 9.5159 9.5159 1.6537 1.6537 -3.3594 -3.3594 |
| QZ
4.9020 5.8015 5.8015 10.360 -10.360 -5.8015 -5.8015 -4.9020 -4.9020 |
-------------------------------------------------------------------------------| 10_
41-2
42-1
42-2
43-1
43-2
44-1
44-2
45-1
45-2 |
|
41
42
42
43
43
1
1
39
39
|
|
42
43
43
44
44
44
44
45
45
|
-------------------------------------------------------------------------------| MK
-0.4179 -0.4179 -0.4904 -0.4904 -0.6285 -0.8506 -0.6285
|
| MY
-9.1942 -9.1942 -16.798 -16.798 -19.732 0.9214 -19.732 -1.0677 9.1358 |
| QZ
-7.0013 -7.0013 -7.2323 -7.2323 4.4821 -42.303 -4.4821 20.721 2.2762 |
-------------------------------------------------------------------------------| 10_
46-1
46-2
47-1
47-2
48-1
48-2
49-1
49-2
50-1 |
|
45
45
46
46
47
47
48
48
49
|
|
46
46
47
47
48
48
49
49
50
|
-------------------------------------------------------------------------------| MY
9.1358 7.6614 7.6614 3.6463 3.6463 0.5913 0.5913 -0.9668 -0.9668 |
| QZ
2.2762 -3.7200 -3.7200 -3.7781 -3.7781 -2.2818 -2.2818 -0.8742 0.8742 |
-------------------------------------------------------------------------------| 10_
50-2
51-1
51-2
52-1
52-2
53-1
53-2
54-1
54-2 |
|
49
50
50
51
51
52
52
53
53
|
|
50
51
51
52
52
53
53
17
17
|
-------------------------------------------------------------------------------| MY
0.5913 0.5913 3.6463 3.6463 7.6614 7.6614 9.1358 9.1358 -1.0677 |
| QZ
2.2818 2.2818 3.7781 3.7781 3.7200 3.7200 -2.2762 -2.2762 -20.721 |
-------------------------------------------------------------------------------| 10_
55-1
55-2
56-1
56-2
57-1
57-2
58-1
58-2
59-1 |
|
6
6
54
54
55
55
56
56
57
|
|
54
54
55
55
56
56
57
57
58
|
-------------------------------------------------------------------------------118
| MY
-1.3010 9.7324 9.7324 8.1899 8.1899 3.9539 3.9539 0.8786 0.8786 |
| QZ
22.355 2.4952 2.4952 -3.9517 -3.9517 -3.9321 -3.9321 -2.1542 -2.1542 |
--------------------------------------------------------------------------------
продолжение табл.7.2.2
-------------------------------------------------------------------------------| 10_
59-2
60-1
60-2
61-1
61-2
62-1
62-2
63-1
63-2 |
|
57
58
58
49
49
59
59
60
60
|
|
58
49
49
59
59
60
60
61
61
|
-------------------------------------------------------------------------------| MY
-0.4116 -0.4116 -0.2079 -0.2079 -0.4116 -0.4116 0.8786 0.8786 3.9539 |
| QZ
-0.4916 -0.4916 0.8742 -0.8742 0.4916 0.4916 2.1542 2.1542 3.9321 |
-------------------------------------------------------------------------------| 10_
64-1
64-2
65-1
65-2
66-1
66-2
|
|
61
61
62
62
63
63
|
|
62
62
63
63
28
28
|
-------------------------------------------------------------------------------| MY
3.9539 8.1899 8.1899 9.7324 9.7324 -1.3010
|
| QZ
3.9321 3.9517 3.9517 -2.4952 -2.4952 -22.355
|
--------------------------------------------------------------------------------
7.3. Расчёт поперечной рамы одноэтажного стального
каркаса промышленного здания
В поперечной раме представленной на рис. 7.3.1 определить
максимальный прогиб фермы. Определить расчётные усилия в
нижней части левой стойки.
Нагрузка на ферму (узловая) P1=2.7 т; вес колонны GК=4 т; вес
подкрановой балки ППБ=3.5 т; снег (на узел) PС=3.6 т; ветер
сосредоточенный в низу ригеля: активный WА=0.48 т, пассивный
WП=0.36 т; ветер распределённый по колонне: активный wА=0.13 т/м,
пассивный wП=0.1 т/м; крановые DMAX=200 т, DMIN=100 т; тормозная
T=38 т.
119
q сн
qш
5
7
6
3
G пб
D max
6
7
6
T
4
е i = 1.25 м
GK
3
G пб
D min
е i =1.25 м
е = 0.5 м
Н H = 10 м
е = 0.5 м
1
Wп
6
h пб =1.2 м
Wa
Н B = 5м 3.7 м
7
1
GK
24 м
wa
wп
2
1
Рис. 7.3.1. Расчётная схема
Жесткостные характеристики поперечных сечений элементов
стальной поперечной рамы приведены в табл. 7.3.1. Правила задания
жесткостных характеристик см. п.2.6. Зададим параметры жесткости с
помощью численных характеристик (для плоской задачи достаточно
EA и EJY)
Для вычисления расчётных сочетаний усилий в стержнях
необходимо задать размеры ядер сечений в обоих направлениях.
15.04 Таблица 7.3.1
(a) Жесткостные характеристики сечений элементов
Тип
Жесткости
1
2
3
4
5
6
7
EA
т
550000
5500000
260000
100000
110000
120000
34000
EJY
тм2
77000
770000
12000
Y1
0.15
0.15
0.05
0.03
0.03
0.02
0.01
Размеры ядра сечения, м
Y2
Z1
0.15
0.30
0.15
0.30
0.05
0.20
0.03
0.05
0.03
0.06
0.02
0.05
0.01
0.02
Z2
0.30
0.30
0.20
0.02
0.02
0.02
0.01
Конечно-элементная расчётная схема перекрёстной балочной
системы показана на рис. 7.3.2.
120
ПOCTOЯННЫE
16
11
17
18
20
19
12
21
13
22
23
14
10
15
34
9
Z
24
33
86 7
31 3032
5
29
4
28
3
27
2
26
1
25
X
Рис. 7.3.2. Конечно-элементная схема
Ниже приведен текст исходных данных для расчёта
комментариями, поясняющими процесс задания исходных данных.
(0/1;ПРИМЕР-3/2;2/
/* Признак схемы - 2 [X, Z, Uy] */
39;1:Постоянные;
2:Снег по всему пролёту;
3:Снег слева;
4:Снег справа;
5:Ветер слева;
6:Ветер справа;
7:Крановая Dmax слева;
8:Крановая Dmin слева;
9:Тормозная слева;
10:Тормозная справа/)
(1/
/* Открыть документ 1
*/
2 1 1 2/
/* Задание 1-го КЭ №2 [стержень */
R 1 4/0 0 1 1/
/* плоский] тип жесткости 1
*/
2 2 6 7/2 2 6 8/
/* Задание жестких вставок тип 2 */
2 3 8 9/2 3 9 10/2 3 10 11//* Задание элементов верхней части*/
2 3 11 16/
/* колонны тип жесткости 3
*/
2 1 25 26/
/* Задание КЭ нижней части правой */
R 1 4/0 0 1 1
/* стойки
*/
2 2 30 31/2 2 30 32/
/* Задание жестких вставок тип 2 */
2 3 32 33/2 3 33 34/
/* Задание элементов верхней части*/
2 3 34 15/2 3 15 24/
/* правой колонны, тип жесткости 3*/
1 4 11 12/R 1 3/0 0 1 1/
/* Задание КЭ нижнего пояса, тип 4*/
1 5 16 17/R 1 7/0 0 1 1/
/* Задание КЭ верхн. пояса, тип 5*/
1 6 11 17/2 6 12 17/
/* Задатие КЭ раскосов фермы, тип */
1 6 12 19/2 6 13 19/
/* жесткости 6
*/
1 6 13 21/2 6 21 14/
/* [КЭ №1 - стержень плоск. фермы]*/
1 6 14 23/2 6 23 15/
/*
*/
1 7 12 18/2 7 13 20/
/* Задание КЭ стоек фермы,
тип */
1 7 14 22/)
/* жесткости 7
*/
(3/
/* Открыть документ 3
*/
1 55E4 77E3 Y .15 .15 Z .3 .3/ /* Тип жесткости 1, низ колон.*/
2 55E5 77E4 Y .15 .15 Z .3 .3/ /* Тип 2 жесткая вставка
*/
3 26E4 12E3 Y .05 .05 Z .2 .2/ /* Тип 3 верхняя часть колон.*/
4 1E5
Y .03 .03 Z .05 .02/ /* Тип 4 нижний пояс фермы
*/
5 11E4
Y .03 .03 Z .06 .02/ /* Тип 5 верхний пояс фермы */
6 12E4
Y .02 .02 Z .05 .02/ /* Тип 6 раскосы фермы
*/
7 34E3
Y .01 .01 Z .02 .01/)/* Тип 7 стойки фермы
*/
(4/
/* Открыть документ 4
*/
0.5 0 0/R 1 5/0 0 2/
/* Задание координат низа колонны */
121
с
1.25 0 10/0 0 10/
0 0 11.2/0 0 13.1/0 0 15/
R 1 4/6/
0 0 17.5/R 1 4/3 0 0.3/
R 1 4/3 0 -0.3/
23.5 0 0/R 1 5/0 0 2/
22.75 0 10/24 0 10/
24 0 11.2/24 0 13.1/)
(5/
1 1 3 5/25 1 3 5/)
(6/
16 0 3 2 1/17 0 3 1 1/
R 1 6/1/24 0 3 2 1/
5 0 3 3 1/29 0 3 3 1/
7 0 3 4 1/31 0 3 4 1/
16 0 3 6 2/17 0 3 5 2/
R 1 6/1/24 0 3 6 2/
16 0 3 6 3/17 0 3 5 3/
R 1 3/1/
20 0 3 5 4/R 1 3/1/
24 0 3 6 4/
11 0 1 7 5/15 0 1 8 5/
1 6 3 9 5/R 1 4/1/
8 6 3 9 5/R 1 2/1/
12 6 3 10 5/R 1 4/1/
19 6 3 10 5/R 1 2/1/
11 0 1 12 6/15 0 1 11 6/
1 6 3 14 6/R 1 4/1/
8 6 3 14 6/R 1 2/1/
12 6 3 13 6/R 1 4/1/
19 6 3 13 6/R 1 2/1/
7 0 3 15 7/31 0 3 16 7/
7 0 3 16 8/31 0 3 15 8/
9 0 1 17 9/33 0 1 17 10/)
(7/
1 2.7/
2 1.35/
3 4/
4 3.5/
5 3.6/
6 1.8/
7 -0.48/
8 -0.36/
9 -0.13/
10 -0.1/
11 0.48/
12 0.36/
13 0.13/
14 0.1/
15 200/
16 100/
17 -38/)
(8/
0 0 0 0 0 0 0/
2 0 0 1 0 0 0/
2 0 0 1 0 0 0/
2 0 0 1 0 0 0/
2 0 0 2 0 0 0/
2 0 0 2 0 0 0/
3 0 0 3 0 9 10/
3 0 0 3 0 9 10/
4 0 1 4 0 0 0/
4 0 1 4 0 0 0/)
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
Координаты 7 и 8 узлов
*/
Координаты 9 10 и 11 узлов
*/
Описание координат 12...15 узлы*/
Координаты 16...20 узлы
*/
Координаты 21...24 узлы
*/
Координаты нижней части правой */
Координаты 31 и 32 узлов
*/
Координаты 33 и 34 узлов
*/
Открыть документ 5
*/
Связи по X,Z,Uy в узлах 1 и 25 */
Открыть документ 6
*/
Собственный вес шатра [Загруже-*/
ние 1]
*/
Собственный вес колонн
*/
Собственный вес подкран. балок */
Снег по всему пролёту фермы
*/
[Загружение 2]
*/
Снег на левой половине пролёта */
[Загружение 3]
*/
Снег на правой половине пролёта*/
[Загружение 4]
*/
Ветер сосредоточенный
слева */
Ветер активный распред. слева */
в местной системе координат
*/
[Загружение 5]
*/
*/
Ветер сосредоточенный
справа */
Ветер активный распред. справа */
*/
[Загружение 6]
*/
*/
Dmax слева, Dmin справа
[7] */
Dmin слева, Dmax справа
[8] */
Тормозн. у левой и правой стоек*/
Открыть документ 7
*/
Нагрузка от веса шатра
*/
Половина от нагрузки на шатёр */
Вес колонны
*/
Вес подкрановой балки
*/
Вес снега на узел фермы
*/
Половина веса снега на узел
*/
Сосредоточенный ветер активный */
Сосредоточенный ветер пассивный*/
Распределённый ветер активный */
Распределенный ветер пассивный */
Тот же
*/
ветер
*/
только
*/
справа
*/
Крановая Dmax
*/
Крановая Dmin
*/
От поперечного торможения крана*/
Открыть документ 8 "РСУ"
*/
*/
Загружения 9 и 10 - знакопере- */
менные.
*/
Загружения 2, 3, 4 взаимоискл. */
Загружения 5 и 6
взаимоискл. */
Загружения 7 и 8
взаимоискл. */
Загружения 9 и 10 взаимоискл. */
Загружения 9 и 10 [тормозные] */
являются сопутствующими для
*/
крановых загружений 7 и 8
*/
122
16.
Координаты узлов и нагрузки описаны в правой декартовой системе
координат (используется по умолчанию).
17. Ферма смоделирована КЭ №1 "Стержень плоской шарнирно-стержневой
системы", стойки рамы – КЭ №2 "Стержень плоской рамы". КЭ №1 воспринимает
только осевое усилие N. КЭ №2 воспринимает: осевое усилие N, изгибающий
момент M относительно оси Y1, перерезывающую силу Q, действующую вдоль оси
Z1.
18. Графы с 8 по 11 документа 8 "Расчётные сочетания усилий" формируются
по умолчанию в соответствиями с правилами п.2.11.
19. РСУ для стержней выбираются по критерию экстремальных нормальных и
сдвиговых напряжений в периферийных зонах сечения.
20. В результате расчёта получены перемещения узлов (деформированная
схема см. рис. 7.3.3) и усилия в элементах от каждого загружения (см. рис. 7.3.4,
табл. 7.3.2 и 7.3.3).
21. Определены расчётные сочетания усилий (РСУ см. табл.7.3.4).
ПOCTOЯННЫE
22.
Рис. 7.3.3. Деформированная схема от постоянных и длительных нагрузок
Z
Y
X
ПOCTOЯННЫE
Эпюра N
Единицы измерения - т
16
11
17
18
12
19
20
13
21
22
14
10
9
Z
Y
X
Минимальное у силие -18.3
Максимальное у силие 16.7205
23
ПOCTOЯННЫE
Эпюра My
Единицы измерения - т*м
24
16
15
11
34
10
33
9
17
18
12
19
20
13
21
22
23
14
24
15
34
33
86 7
31 3032
86 7
31 3032
5
29
5
29
4
28
4
28
3
27
3
27
2
26
2
26
1
25 Z Y
1
25
Рис. 7.3.4. Эпюры N и МY от постоянных
и длительных нагрузок (загружение 1)
X
Nmax=16.72 т; Nmin= – 17.30 т; МY,max=3.96 т*м; МY,min= – 3.96 т*м
Минимальное у силие -3.96301
Максимальное у силие 3.96301
22.01 Таблица 7.3.2
(a) Перемещения узлов
-------------------------------------------------------------------------------|
11
12
13
14
15
16
17
18
19
|
123
-------------------------------------------------------------------------------|
1 ПOCTOЯННЫE
|
| X
-1.5307 -1.0032
1.0032 1.5307 .50697 .86559 .72165 .43357 |
| Z
-.69375 -6.3540 -8.1560 -6.3540 -.69375 -.70559 -3.9640 -6.6002 -7.7950 |
| UY
.60950
-.60950 .91785
|
|
2 CНEГ ПO ВCEMY ПPOЛёTY
|
| X
-2.0938 -1.3633
1.3633 2.0938 .67906 1.1587 .96642 .58116 |
| Z
-.81473 -8.4539 -10.883 -8.4539 -.81473 -.83068 -5.2356 -8.7821 -10.399 |
| UY
.86313
-.86313 1.2322
|
|
3 CНEГ CЛEВA
|
| X
-2.4763 -1.8957 -.93745 -.26082 -.01198 -.70469 -.37926 -.56142 -.91214 |
| Z
-.68608 -5.6515 -6.4735 -4.2478 -.23932 -.70239 -3.6706 -5.9797 -6.6032 |
| UY
.52931
-.47910 .79833
|
--------------------------------------------------------------------------------
продолжение табл.7.3.2
-------------------------------------------------------------------------------|
4 CНEГ CПPAВA
|
| X
.01198 .26082 .93745 1.8957 2.4763 1.4918 1.7268 1.6862 1.6049 |
| Z
-.23932 -4.2478 -6.4735 -5.6515 -.68608 -.23870 -2.4090 -4.2478 -5.6791 |
| UY
.47910
-.52931 .64835
|
|
5 ВETEP CЛEВA
|
| X
10.327 10.366 10.369 10.344 10.283 10.513 10.495 10.494 10.490 |
| Z
.49507 .22657 .04868 -.15020 -.48995 .49390 .34260 .22657 .13797 |
| UY
.28435
.31624 -.03013
|
|
6 ВETEP CПPAВA
|
| X
-10.283 -10.344 -10.369 -10.366 -10.327 -10.512 -10.496 -10.495 -10.491 |
| Z
-.48995 -.15020 .04868 .22657 .49507 -.48871 -.28995 -.15020 -.04163 |
| UY
-.31624
-.28435 .02053
|
|
7 KPAНOВAЯ DMAX CЛEВA
|
| X
32.882 32.129 31.337 30.476 29.478 31.562 31.466 31.474 31.498 |
| Z
.02163 2.3053 2.7620 1.5163 -2.1231 .02367 1.5696 2.3053 2.8853 |
| UY
-.89805
2.3461 -.34305
|
|
8 KPAНOВAЯ DMIN CЛEВA
|
| X
-29.478 -30.476 -31.337 -32.129 -32.882 -31.761 -31.766 -31.746 -31.695 |
| Z
-2.1231 1.5163 2.7620 2.3053 .02163 -2.1152 .22113 1.5163 2.5122 |
| UY
-2.3461
.89805 -.19680
|
|
9 TOPMOЗНAЯ CЛEВA
|
| X
122.75 121.97 120.96 119.73 118.13 122.37 122.23 122.31 122.40 |
| Z
6.8201 7.4057 5.9837 2.2100 -5.4609 6.8180 7.5498 7.4057 7.1488 |
| UY
.22244
5.0338 -.34345
|
| 10 TOPMOЗНAЯ CПPAВA
|
| X
118.13 119.73 120.96 121.97 122.75 122.79 122.75 122.76 122.71 |
| Z
5.4609 -2.2100 -5.9837 -7.4057 -6.8201 5.4433 .79384 -2.2100 -4.6227 |
| UY
5.0338
.22244 .28320
|
--------------------------------------------------------------------------------
В таблице приведены перемещения узлов для всех заданных
загружений (без учёта знакопеременности).
Максимальный прогиб фермы в узле №13. ΔZ,max=Δ(1) + Δ(2) + Δ(7) +
Δ(10)= – 8.156 – 10.833 + 2.762 – 5.984 = – 22.211 мм. Здесь Δ(I) –
вертикальное перемещение узла №13 от i-го загружения.
Максимальный прогиб получился при сложении перемещений от 1, 2,
7 и 10 загружений.
22.02
22.03 Таблица 7.3.3
(a) Усилия в элементах
-------------------------------------------------------------------------------|
2_
1-1
1-2
2-1
2-2
3-1
3-2
4-1
4-2
5-1 |
|
1
1
2
2
3
3
4
4
5
|
|
2
2
3
3
4
4
5
5
6
|
-------------------------------------------------------------------------------|
1ПOCTOЯННЫE
|
| N
-18.299 -18.299 -18.299 -18.299 -18.299 -18.299 -18.299 -18.299 -14.300 |
| M
-3.9630 -3.4099 -3.4099 -2.8568 -2.8568 -2.3037 -2.3037 -1.7506 -1.7506 |
| Q
.27654 .27654 .27654 .27654 .27654 .27654 .27654 .27654 .27654 |
|
2CНEГ ПO ВCEMY ПPOЛёTY
|
| N
-14.400 -14.400 -14.400 -14.400 -14.400 -14.400 -14.400 -14.400 -14.400 |
| M
-4.5412 -4.4233 -4.4233 -4.3054 -4.3054 -4.1875 -4.1875 -4.0696 -4.0696 |
| Q
.05895 .05895 .05895 .05895 .05895 .05895 .05895 .05895 .05895 |
|
3CНEГ CЛEВA
|
124
| N
-11.739 -11.739 -11.739 -11.739 -11.739 -11.739 -11.739 -11.739 -11.739 |
| M
-4.0529 -3.9508 -3.9508 -3.8487 -3.8487 -3.7466 -3.7466 -3.6446 -3.6446 |
| Q
.05103 .05103 .05103 .05103 .05103 .05103 .05103 .05103 .05103 |
|
4CНEГ CПPAВA
|
| N
-4.4600 -4.4600 -4.4600 -4.4600 -4.4600 -4.4600 -4.4600 -4.4600 -4.4600 |
| M
-1.3708 -1.2687 -1.2687 -1.1666 -1.1666 -1.0645 -1.0645 -.96252 -.96252 |
| Q
.05103 .05103 .05103 .05103 .05103 .05103 .05103 .05103 .05103 |
|
5ВETEP CЛEВA
|
| N
.26050 .26050 .26050 .26050 .26050 .26050 .26050 .26050 .26050 |
| M
16.716 12.412 12.412 8.6284 8.6284 5.3644 5.3644 2.6203 2.6203 |
| Q
-2.2820 -2.0220 -2.0220 -1.7620 -1.7620 -1.5020 -1.5020 -1.2420 -1.2420 |
--------------------------------------------------------------------------------
продолжение табл.7.3.3
-------------------------------------------------------------------------------|
6ВETEP CПPAВA
|
| N
-.26050 -.26050 -.26050 -.26050 -.26050 -.26050 -.26050 -.26050 -.26050 |
| M
-15.766 -11.950 -11.950 -8.5348 -8.5348 -5.5189 -5.5189 -2.9029 -2.9029 |
| Q
2.0079 1.8079 1.8079 1.6079 1.6079 1.4079 1.4079 1.2079 1.2079 |
|
7KPAНOВAЯ DMAX CЛEВA
|
| N
-199.36 -199.36 -199.36 -199.36 -199.36 -199.36 -199.36 -199.36 -199.36 |
| M
6.2909 26.205 26.205 46.119 46.119 66.033 66.033 85.947 85.947 |
| Q
9.9570 9.9570 9.9570 9.9570 9.9570 9.9570 9.9570 9.9570 9.9570 |
|
8KPAНOВAЯ DMIN CЛEВA
|
| N
-100.63 -100.63 -100.63 -100.63 -100.63 -100.63 -100.63 -100.63 -100.63 |
| M
-54.040 -34.126 -34.126 -14.212 -14.212 5.7014 5.7014 25.615 25.615 |
| Q
9.9570 9.9570 9.9570 9.9570 9.9570 9.9570 9.9570 9.9570 9.9570 |
|
9TOPMOЗНAЯ CЛEВA
|
| N
2.1266 2.1266 2.1266 2.1266 2.1266 2.1266 2.1266 2.1266 2.1266 |
| M
230.17 179.65 179.65 129.12 129.12 78.598 78.598 28.072 28.072 |
| Q
-25.263 -25.263 -25.263 -25.263 -25.263 -25.263 -25.263 -25.263 -25.263 |
| 10TOPMOЗНAЯ CПPAВA
|
| N
2.1266 2.1266 2.1266 2.1266 2.1266 2.1266 2.1266 2.1266 2.1266 |
| M
146.51 121.03 121.03 95.562 95.562 70.089 70.089 44.615 44.615 |
| Q
-12.736 -12.736 -12.736 -12.736 -12.736 -12.736 -12.736 -12.736 -12.736 |
--------------------------------------------------------------------------------
В таблице приведены усилия в элементах от всех заданных
загружений (без учёта знакопеременности).
22.04 Таблица 7.3.4
(a) Расчётные сочетания усилий
-------------------------------------------------------------------------------| ЕЛМ |НС|KРT|СТ|КС|
N
M
Q
НОМЕРА ЗАГРУЖЕНИЙ
|
-------------------------------------------------------------------------------|
|
|
|
|
|
|
|
|
|
|
|
|
1
1
1
2
1
2
5
18
1
2
5
13
18
34
1
2
5
1
2
1
1
2
2
2
2
1
2
1
2
1
K
K
K
K
K
K
A
A
A
A
B
B
B
B
B
B
A
A
A
-18.039
-31.494
-18.560
-32.699
-195.57
-123.98
-121.58
-212.83
-219.78
-106.72
-18.039
-31.494
-18.560
12.753
-22.240
-19.729
-8.5042
223.90
-278.03
-277.59
-223.73
-227.84
169.60
9.0025
-18.146
-15.360
-2.0054
2.1367
2.2845
0.3354
-15.552
33.834
33.827
33.834
35.496
-15.552
-1.7454
1.9567
2.0845
1
1
1
1
1
1
1
1
1
1
1
1
1
5
2
6
2
5
2
3
2
7
5
5
2
6
6
7
6
6
6
9
8
9
8
8
7
9
9
9
9
6
-------------------------------------------------------------------------------|
ЕЛМ |НС|KРT|СТ|КС|
N
M
Q
НОМЕРА ЗАГРУЖЕНИЙ
-------------------------------------------------------------------------------|
|
|
|
|
|
|
|
18
1
2
5
6
13
18
34
1
2
2
2
2
2
1
2
K
K
K
K
K
K
K
A
B
B
B
B
B
B
B
-32.699
-195.57
-123.98
-121.58
-199.59
-212.83
-219.78
-106.72
-7.8332 0.3354
193.03 -15.318
-210.54 33.654
-210.12 33.647
191.89 -15.272
-156.24 33.654
-156.85 35.496
138.73 -15.318
1
1
1
1
1
1
1
1
2
5
2
3
4
2
7
5
7
6
6
5
6
9
8
9
8
8
7
7
9
-------------------------------------------------------------------------------125
9
9
9
9
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23.
В шапке таблицы следующие графы: ЕЛМ – номер элемента; НС
– номер сечения; КРТ – номер критерия, по которому составлено
данное сочетание усилий (печатаются только неповторяющиеся
сочетания); СТ – номер столбца коэффициентов сочетаний (номер
сочетания нагрузок); КС – информация о наличии крановых и
сейсмических воздействиях, вошедших в сочетания.
Индексами А или В в таблице помечаются группы РСУ:
А — группа РСУ, содержащая только те загружения, которые имеют
длительность;
В — группа РСУ, содержащая все загружения.
Далее следуют списки силовых факторов от расчётных нагрузок и
номера загружений, вошедших в расчётные сочетания для
рассматриваемых критериев.
7.4. Расчёт плиты защемлённой по двум
сторонам (учёт симметрии)
В плите защемлённой по коротким сторонам (рис. 7.4.1)
определить максимальный прогиб и усилия в её центре.
Нагрузка на плиту – равномерно распределённая q=0.85 т/м2.
Модуль упругости E=3000000 т/м2, коэффициент Пуассона =0.2,
толщина плиты =15 см.
150 мм
q z = 0.85 т/м
2
5
2,
м
6м
Рис. 7.4.1. Расчётная схема
Текст исходных данных для расчёта выглядит так:
(0/1;ПРИМЕР-4/2;3/)
(1/
11 1 1 2 8 9/
R 1 5/0 0 1 1 1 1/
R 6 4/0 0 7 7 7 7/)
(3/
1 3E6 0.2 0.15/)
(4/
/*
/*
/*
/*
/*
/*
/*
/*
Признак схемы - 3 [Z, Ux, Uy] */
Открыть документ 1
*/
Задание 1-го КЭ №11 [плита]
*/
повторить 1 строку 5 раз
*/
повторить 6 строк 4 раза
*/
Открыть документ 3
*/
E=3E6 т/м.кв., Ню=0.2, t=0.15 м*/
Открыть документ 4
*/
126
0 0 0/R 1 6/1/
R 7 5/0 0.5/)
(5/
1 3 5/R 1 5/7/R 6 1/6/)
(6/
1 6 3 1 1/R 1 14/1/)
(7/
1 0.85/)
/*
/*
/*
/*
/*
/*
/*
/*
Координаты 1...7 узел
*/
Координаты 8...42 узлы
*/
Открыть документ 5
*/
Связи по Z, Ux, Uy
*/
Открыть документ 6
*/
Распределённ. нагрузка на плиту*/
Открыть документ 7
*/
Величина нагрузки q=0.85 т/м.кв*/
Конечно-элементная расчётная схема плиты показана на рис.
7.4.2.
Рис. 7.4.2. Конечно-элементная схема плиты
В этом примере признак системы принят 3 (см. п.2.3.3). Схема,
каждый узел которой содержит три степени свободы: Z; UX; UY.
Плита смоделирована КЭ №11 "Прямоугольный элемент плиты".
КЭ №11 воспринимает: момент MX, действующий на сечение,
ортогональное оси X1; момент MY, действующий на сечение,
ортогональное оси Y1; крутящий момент MXY; перерезывающая сила
QX в сечении, ортогональном оси X1; перерезывающая сила QY в
сечении, ортогональном оси Y1.
24.
В результате расчёта получены перемещения узлов (деформированная
схема см. рис. 7.4.3) и усилия в элементах от каждого загружения (табл. 7.4.1 и
7.4.2, рис.7.4.4).
25.
Загру жение 1
36
37
29
30
22
2
3
5
127
Z
Y
X
28
20
12
4
35
27
19
11
42
34
26
18
10
41
33
25
17
9
40
32
24
16
8
39
31
23
15
1
38
21
13
6
14
7
Рис. 7.4.3. Деформированная схема
Рис. 7.4.4. Изополе усилия МX МX,max=1.115 (т*м)/м; МX,min= – 1.423 (т*м)/м
25.01 Таблица 7.4.1
(a) Перемещения узлов
-------------------------------------------------------------------------------|
10
11
12
13
14
15
16
17
18
|
-------------------------------------------------------------------------------| Z
-2.6091 -3.3036 -2.6091 -1.0206
-1.0138 -2.5864 -3.2706 |
| UX
0.0712 0.1059 0.0712 0.0104 0.0216 -0.0068 0.0098 0.0218 0.0308 |
| UY
1.3068
-1.3068 -1.6321
1.6175 1.2895
|
--------------------------------------------------------------------------------
В таблице приведены перемещения некоторых узлов, в том числе
и перемещение центрального узла №18. Максимальный прогиб плиты
в узле №18. ΔZ,max= – 3.271 мм.
25.02 Таблица 7.4.2
(a) Усилия в элементах
-------------------------------------------------------------------------------| 11_
10-1
11-1
12-1
13-1
14-1
15-1
16-1
17-1
18-1 |
|
11
12
13
15
16
17
18
19
20
|
|
12
13
14
16
17
18
19
20
21
|
-------------------------------------------------------------------------------| MX
1.1191 0.2782 -1.4331 -1.4227 0.2771 1.1148 1.1148 0.2771 -1.4227 |
| MY
0.1188 0.0134 -0.3111 -0.2896 0.0019 0.1340 0.1340 0.0019 -0.2896 |
| MXY -0.0152 -0.0205 -0.0138
|
| QX
-0.3798 -1.1690 -2.2100 2.1044 1.2131 0.3845 -0.3845 -1.2131 -2.1044 |
| QY
0.0391 -0.0471 0.1089
|
--------------------------------------------------------------------------------
В таблице приведены усилия для ряда элементах в том числе и
усилия в центральном элементе №15 (находящийся в пределах узлов
17, 18, 24, 25). МX,15=1.115 (т*м)/м.
128
17
10
9
11
12
5
6
1
1
16
8
4
X
12
15
10
5
20
11
7
Y
19
14
9
15
6
7
8
2
2
1
0.5
14
18
13
24
0.5
13
23
0.5
22
0.5
21
3
3
0.5
ру жение 1
4
1
1
Нетрудно заметить, что
расчётная схема (рис. 7.4.2)
имеет
симметрию
относительно оси Y по узлам
4; 11; 18; 25; 32; 39. В
соответствии с п.6.11 для
уменьшения
размерности
задачи
рекомендуется
рассчитывать часть схемы.
С
учётом
симметрии
расчётная
схема
плиты
выглядит следующим образом
см. рис. 7.4.5.
Рис. 7.4.5. Расчётная схема плиты
с учётом симметрии
Текст исходных данных для расчёта приведён ниже.
(0/1;ПРИМЕР-4a/2;3/)
(1/11 1 1 2 5 6/
R 1 2/0 0 1 1 1 1/
R 3 4/0 0 4 4 4 4/)
(3/1 3E6 0.2 0.15/)
(4/0 0 0/R 1 3/1/
R 4 5/0 0.5/)
(5/1 3 5/R 1 5/4/
4 5/R 1 5/4/)
(6/1 6 3 1 1/R 1 29/1/)
(7/1 0.85/)
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
Признак схемы - 3 [Z, Ux, Uy] */
Задание 1-го КЭ №11 [плита]
*/
повторить 1 строку 2 раз
*/
повторить 3 строк 4 раза
*/
E=3E6 т/м.кв., Ню=0.2, t=0.15 м*/
Координаты 1...4 узел
*/
Координаты 5...24 узлы
*/
Связи на левой опоре Z, Ux, Uy */
Связи для организации симметрии*/
Распределённ. нагрузка на плиту*/
Величина нагрузки q=0.85 т/м.кв*/
В отличие от предыдущего примера задания исходных данных для
расчёта плиты здесь в документе 5 на узлы: 4; 8; 12; 16; 20; 24
наложены связи на угол поворота относительно оси Y (UY), тем самым
организуется симметрия относительно плоскости, в которой лежат
перечисленные узлы.
В отличие от рекомендаций табл. 7.1, накладывать связи по
направлениям X, UZ не имеет смысла так как в данной системе они
отсутствуют (в исходных данных задан признак системы – 3).
25.03
25.04 Таблица 7.4.3
(a) Перемещения узлов
-------------------------------------------------------------------------------|
10
11
12
13
14
15
16
17
18
|
-------------------------------------------------------------------------------| Z
-1.0138 -2.5864 -3.2706
-1.0138 -2.5864 -3.2706
-1.0206 |
| UX
0.0098 0.0218 0.0308 0.0068 -0.0098 -0.0218 -0.0308 -0.0216 -0.0104 |
| UY
1.6175 1.2895
1.6175 1.2895
1.6321 |
--------------------------------------------------------------------------------
129
В таблице приведены перемещения некоторых узлов, в том числе
и узел с максимальным прогибом плиты (узле №12). ΔZ,max= – 3.271
мм. Прогиб аналогичен узлу №18 схемы без учёта симметрии см.
табл.
7.4.1.
Так
же
для
наглядности
можно
сравнить
деформированные схемы рис.7.4.3 и рис. 7.4.6.
Загру жение 1
21
22
17
18
13
Z
16
11
6
2
20
15
10
5
24
19
14
9
1
23
12
7
3
8
4
Y
X
Рис. 7.4.6. Деформированная схема
Рис. 7.4.7. Изополе МX МX,max=1.115 (т*м)/м; МX,min=
– 1.423 (т*м)/м
25.05 Таблица 7.4.4
(a) Усилия в элементах
-------------------------------------------------------------------------------| 11_
1-1
2-1
3-1
4-1
5-1
6-1
7-1
8-1
9-1 |
|
1
2
3
5
6
7
9
10
11
|
|
2
3
4
6
7
8
10
11
12
|
-------------------------------------------------------------------------------| MX
-1.4192 0.2693 1.1347 -1.4331 0.2782 1.1191 -1.4227 0.2771 1.1148 |
| MY
-0.1645 0.0261 0.0629 -0.3111 0.0134 0.1188 -0.2896 0.0019 0.1340 |
| MXY -0.0259 0.0926 0.0422 0.0138 0.0205 0.0152
|
| QX
1.9898 1.1576 0.3832 2.2100 1.1690 0.3798 2.1044 1.2131 0.3845 |
| QY
-0.6505 0.0206 0.1153 0.1089 -0.0471 0.0391
|
--------------------------------------------------------------------------------
Усилия в элементе №9 (находящийся в пределах узлов 11, 12, 15,
16) МX,9=1.115 (т*м)/м аналогичны усилиям в элементе 15 схемы без
учёта симметрии см. табл. 7.4.2.
7.5. Организация шарнира в плите
защемлённой по двум сторонам
В ряде случаев при моделировании строительных конструкций
необходимо организовать шарнир. В соответствии с п.2.5. документ 2
"Шарниры" позволяет задать шарниры только для стержней. Поэтому
для
организациями
шарниров
в
пластинчатых
элементов
воспользуемся рекомендациями п.6.6.
Расчётная схема плиты с шарниром приведена на рис.7.5.1.,
Данные для расчёта: характеристики жесткости, нагрузка и задание на
расчёт возьмём из предыдущего примера с той лишь разницей, что в
130
середине плиты необходимо организовать цилиндрический шарнир
параллельный оси Y.
Шарнир
2
150 мм
q z = 0.85 т/м
5
2,
м
6м
Рис. 7.5.1. Расчётная схема
Для этого введём двойную нумерацию узлов среднего ряда (рис.
7.5.2). Координаты узлов {4, 5}; {12, 13}; {20, 21}; {28, 29}; {36, 37}; {44,
45} попарно совпадают, тем самым плита получается разрезана на
две независимые части. Для того чтобы соединить эти части нужно в
отмеченных пáрных узлах объединить перемещения по направлению
Z и UX. По направлению UY объединение не производим так как по
этому направлению организуется шарнир.
Рис. 7.5.2. Конечно-элементная схема
131
Текст исходных
образом:
данных
(0/1;ПРИМЕР-5/2;3/)
(1/11 1 1 2 9 10/
R 1 2/0 0 1 1 1 1/
R 3 1/0 0 4 4 4 4/
R 6 4/0 0 8 8 8 8/)
(3/1 3E6 0.2 0.15/)
(4/0 0 0/R 1 3/1/
R 4 1/3/
R 8 5/0 0.5/)
(5/1 3 5/R 1 5/8/R 6 1/7/)
4 1 3/5/
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
R 2 5/8/
(6/1 6 3 1 1/R 1 29/1/)
(7/1 0.85/)
для
расчёта
выглядит
следующим
Признак схемы - 3 [Z, Ux, Uy] */
Задание 1-го КЭ №11 [плита]
*/
повторить 1 строку 2 раза
*/
повторить 3 строки 1 раз
*/
повторить 6 строк 4 раза
*/
E=3E6 т/м.кв., Ню=0.2, t=0.15 м*/
Координаты 1...4 узел
*/
Координаты 5...8 узел
*/
Координаты 9...48 узлы
*/
Связи по Z, Ux, Uy
*/
Объединить перемещения X и Z
*/
4 и 5 узлов
*/
повторить 2 строки 5 раз
*/
Распределённ. нагрузка на плиту*/
Величина нагрузки q=0.85 т/м.кв*/
Загру жение 1
26.
В результате расчёта имеем:
25
26
19
20
13
29
22
15
8
2
28
21
14
7
1
27
23
16
9
4
24
17
10
3
30
18
11
5
12
6
Рис. 7.5.2. Деформированная схема (цифрами
обозначены порядковые номера КЭ)
Z
Y
X
Рис. 7.5.3. Изополе усилия МX МX,max=0; МX,min= – 2.73 (т*м)/м
26.01 Таблица 7.5.1
(a) Перемещения узлов
-------------------------------------------------------------------------------|
19
20
21
22
23
24
25
26
27
|
-------------------------------------------------------------------------------| Z
-5.5769 -9.9582 -9.9582 -5.5769 -1.7769
-1.7769 -5.5769 |
132
| UX
-0.0349 -0.0313 -0.0313 -0.0349 -0.0183 -0.0096 0.0096 0.0183 0.0349 |
| UY
4.2500 4.4331 -4.4331 -4.2500 -3.1170
3.1170 4.2500 |
--------------------------------------------------------------------------------
Максимальный прогиб плиты в узле №20. ΔZ,max= – 9.958 мм.
26.02
26.03 Таблица 7.5.2
(a) Усилия в элементах
-------------------------------------------------------------------------------| 11_
10-1
11-1
12-1
13-1
14-1
15-1
16-1
17-1
18-1 |
|
13
14
15
17
18
19
21
22
23
|
|
14
15
16
18
19
20
22
23
24
|
-------------------------------------------------------------------------------| MX
-0.1395 -0.9810 -2.7232 -2.7297 -0.9770 -0.1375 -0.1375 -0.9770 -2.7297 |
| MY
0.0785 -0.0711 -0.5165 -0.4986 -0.1054 0.0844 0.0844 -0.1054 -0.4986 |
| MXY -0.0087 0.0183 0.0369
|
| QX
-0.4002 -1.2196 -2.4481 2.3345 1.2857 0.4056 -0.4056 -1.2857 -2.3345 |
| QY
0.0319 -0.1186 0.0502
|
--------------------------------------------------------------------------------
Для центрального элемента №15 (находящийся в пределах узлов
19, 20, 27, 28) МX,15= – 0.138 (т*м)/м. Усилие МX,15≠0 ввиду того что по
умолчанию для пластинчатых элементов усилия выводятся по центру
тяжести элемента, т. е. в нашем примере на расстоянии 0.5 м от
шарнира. Естественно в самом шарнире МX=0.
7.6. Расчёт стеновой панели
(удаление элементов из схемы)
В опёртой на два нижних угла стеновой панели с проёмом (рис.
7.6.1) определить максимальный прогиб верхней грани панели и
горизонтальные растягивающие напряжения внизу панели.
1,2 м
q z = 0.55 т/м
3м
2,4 м
1,5 м
1,2 м
0,75 м
= 200 мм
2
2,4 м
2,4 м
Рис. 7.6.1. Расчётная схема
Нагрузка действует в плоскости панели (собственный вес) –
равномерно распределена q=0.55 т/м2. Модуль упругости E=2100000
т/м2, коэффициент Пуассона =0.2, толщина плиты =20 см.
(Конечно-элементная расчётная схема стеновой
панели показана
на рис.7.6.2.
133
46
47
37
9
40
51
52
41
42
31
32
53
43
33
22
11
12
2
23
12
13
3
3
4
4
0.6
13
14
14
5
5
0.6
0.6
15
6
0.38
16
7
Рис. 7.6.2. Конечно-элементная схема
27
17
7
0.6
36
24
26
16
6
45
32
35
25
15
54
40
44
34
24
63
48
23
10
0.6
62
31
21
2
0.6
50
72
56
39
30
11
1
X
61
18
20
1
49
39
29
71
55
26
17
10
60
81
64
47
48
38
19
59
70
54
34
25
28
58
69
53
80
63
42
33
Z
57
68
52
79
62
0.38
56
41
67
51
78
61
0.38
55
66
50
77
60
0.38
65
49
76
59
0.38
64
75
58
0.38
74
57
0.38
73
18
8
8
0.6
9
0.38
Загру жение 1
0.6
Текст исходных данных для расчёта выглядит так:
(0/1;ПРИМЕР-6/2;2/
/* Признак схемы - 2 [X, Z, Uy] */
38;200:19-22 27-30 35-38 43-46/) /* Исключить элементы:
*/
/* 19-22 27-30 35-38 43-46
*/
(1/21 1 1 2 10 11/
/* КЭ №21 [балка-стенка]
*/
R 1 7/0 0 1 1 1 1/
/* повторить 1 строку 7 раз
*/
R 8 7/0 0 9 9 9 9/)
/* повторить 8 строк 7 раз
*/
(3/1 21E5 0.2 0.2/)
/* E=21E5 т/м.кв., Ню=0.2, t=0.2 м*/
(4/0 0 0/R 1 8/.6/
/* Координаты 1...9 узел
*/
R 9 8/0 0 .375/)
/* Координаты 10...81 узел
*/
(5/1 3/5 1/9 3/
/* Связи по X, Z
*/
1 5/R 1 80/1/
/* связи по Uy по всем узлам
*/
31 1 3 5/R 1 2/1/
/* Запретить перемещения узлов
*/
R 3 2/9/)
/* находящихся в проёме панели
*/
(6/1 6 3 1 1/R 1 63/1/)
/* Распредел. нагрузка на панель */
(7/1 0.55/)
/* Величина нагрузки q=0.55 т/м.кв*/
В примере признак системы принят – 2. Схема, каждый узел
которой содержит три степени свободы: X; Z; UY.
Панель смоделирована КЭ №21 "Прямоугольный элемент балкистенки". КЭ №21 воспринимает: нормальное напряжение σX вдоль оси
X1; нормальное напряжение σZ вдоль оси Z1; сдвигающее напряжение
XZ. Здесь использован 1 вариант задания жесткостных характеристик
(изотропное тело) без использования служебной информации
(идентификаторов) см.п.3.2.6.
Панель работает в условиях плосконапряженного состояния σY=0.
Каждый узел КЭ №21 имеет 2 линейных перемещения, поэтому
перемещения по направлению UY запрещаем (для уменьшения числа
решаемых уравнений).
Используя возможность, описанную в п.2.3.14 по корректировке
документа 1, удалим часть элементов для организации проёма. Для
снижения порядка системы уравнений запретим перемещения по всем
узлам внутри проёма.
134
агру жение 1
73
74
75
76
77
78
79
80
81
64
65
66
67
68
69
70
71
72
55
56
57
58
59
60
61
62
63
46
47
48
49
50
51
52
53
54
37
38
39
40
41
42
43
44
45
28
29
30
31
32
33
34
35
36
19
20
21
22
23
24
25
26
27
10
11
12
13
14
15
16
17
18
1
2
3
4
5
6
7
8
9
Для
получения
симметрии
при
деформировании
(и
обеспечения
условия
геометрической
неизменяемости
системы)
запретим
перемещение по X узла
№5.
27.
В результате расчёта
получены
перемещения
узлов и усилия в элементах:
Z
X
Рис. 7.6.3. Деформированная схема
Рис. 7.6.4. Изополе напряжений σX
σX,max=14.59 т/м2; σX,min= – 9.03 т/м2
27.01 Таблица 7.6.1
(a) Перемещения узлов
-------------------------------------------------------------------------------|
73
74
75
76
77
78
79
80
81
|
-------------------------------------------------------------------------------| X
0.0049 0.0049 0.0045 0.0029
-0.0029 -0.0045 -0.0049 -0.0049 |
| Z
-0.0370 -0.0369 -0.0379 -0.0402 -0.0415 -0.0402 -0.0379 -0.0369 -0.0370 |
--------------------------------------------------------------------------------
Максимальный прогиб верхней грани панели имеем в узле №77.
ΔZ,max= – 0.042 мм.
135
27.02
27.03 Таблица 7.6.2
(a) Напряжения в элементах
-------------------------------------------------------------------------------| 21_
1-1
2-1
3-1
4-1
5-1
6-1
7-1
8-1
9-1 |
|
1
2
3
4
5
6
7
8
10
|
|
2
3
4
5
6
7
8
9
11
|
-------------------------------------------------------------------------------| NX
5.8302 10.673 11.325 14.589 14.589 11.325 10.673 5.8302 -1.5489 |
| NZ
-28.997 5.8071 0.4877 0.0150 0.0150 0.4877 5.8071 -28.997 -25.319 |
| TXZ -7.1575 3.6885 -2.0603 -1.1101 1.1101 2.0603 -3.6885 7.1575 -6.3703 |
--------------------------------------------------------------------------------
Максимальные растягивающие напряжения в нижней части панели
имеем в элементе №4 (находящийся в пределах узлов 4, 5, 13, 14)
σX,4= 14.589 т/м2. Здесь необходимо отметить, что напряжения
определены в центре тяжести КЭ №4, т.е. на расстоянии 375/2 мм от
нижней грани панели. В связи с этим растягивающие напряжения в
крайних фибрах низа панели будут больше. Для получения
напряжений в узлах (помимо рассчитываемых по центру тяжести
элемента) необходимо в заголовке списка строки 4 документа 0
указать число 100 (см. п.2.2.5). Где в списке перечисляются элементы
в которых необходимо вычислить усилия (напряжения) в узлах КЭ.
7.7. Определение напряженного состояния ленточного
фундамента (плоская деформация)
В железобетонном монолитном фундаменте (рис. 7.7.1)
определить максимальную осадку и максимальные горизонтальные
(поперечные) растягивающие напряжения в подошве фундамента.
Нагрузка действует в плоскости рассматриваемого сечения
фундамента: 1 – собственный вес q=0.25 т/м2; 2 – вертикальная на
каждый узел обреза фундамента P=1.25 т; 3 – горизонтальная на
обрез фундамента H=0.5 т. Модуль упругости E=21·105 т/м2,
коэффициент Пуассона =0.2, толщина рассматриваемого фрагмента
=10 см.
136
q z = 0.125 т/м 2
P = 0.5 т
2
1,7 м
q св= 0.25 т/м
0,6 м
0,4 м
0,6 м
= 0.1 м
1,6 м
R z = 100 т/м
146 147 148 149 150
141 142 143 144 145
136 137 138 139 140
0.1 0.1 0.1 0.1 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12 0.12
151 152 153 154 155
Текст исходных данных для расчёта выглядит так:
131 132 133 134 135
126 127 128 129 130
(0/1;ПРИМЕР-7/2;2/)
/*
121 122 123 124 125
(1/21 1 1 2 16 17/
/*
116 117 118 119 120
R 1 13/0 0 1 1 1 1/
/*
111 112 113 114 115
R 14 3/0 0 15 15
15 15/ /*
106 107
108 109 110
21 1 66 67 76
77/
/*
R 1 3/0 0 1 1
1 103
1/104 105 /*
101 102
21 1 76 77 81
82/
/*
96 97 98 99 100
R 1 3/0 0 1 1 1 1/
/*
94 95
R 4 14/0 0 591592 593 5/
/*
86 87
89 90
51 2 1/R 1 14/0
0 881/)
/*
(3/1 GEI 21E5 0.2810.1
/*
82 83 PD/
84 85
2 3 100/)
/*
76 77 78 79 80
(4/0/R 1 5/.12/R 1
4/.1/
/*
62 63 64 65 66 67 68 69 70 71 /*
72
R 1 615/.12/
47 48 049 .1/
50 51 52 53 54 55 56 /*
57
R 1546 4/0
34 35 0 36.12/
37 38 39 40 41 /*
42
R 315 321 3366/0
18 19 020 .12/)
21 22 23 24 25 26 /*
27
R 165 1715/0
12
(5/8 1/1 2 3 4 5 6 7 8 9 10 11 /*
1 5/R 1 154/1/)
/*
0.12 0.1 0.1 0.1 0.1 0.12 0.12 0.12
(6/151 0.12
0 0.12
3 0.12
2 0.12
1/155
0 3 2 1/ /*
152 0 3 1 1/R 1 2/1/
/*
1 6 3 3 1/R 1 119/1/
/*
155 0 1 4 1/)
/*
(7/1 1.25/2 .625/
/*
3 .25/4 0.5/)
/*
Признак схемы - 2 [X, Z, Uy] */
КЭ №21 [балка-стенка]
*/
повторить 1 строку 13 раз
*/
повторить 14 строк 4 раза
*/
Описание 57-го элемента
*/
повторить 1 строку 3 раза
*/
Описание 61-го элемента
*/
повторить 1 строку 4 раза
*/
повторить 4 строки 14 раз
*/
Моделирован. упругого основания*/
Изотропия, плоская деформация */
Жесткость для КЭ №51 - Rz=100 */
Координаты 1...10 узел
*/
73
74 75
Координаты
11...15 узел
*/
58
59 60
Координаты
16...75 узел
*/
43
44 45
Координаты
76...80 узел
*/
28
29 30
Координаты
81...155 узел
*/
13
14 15 по X в 8-м узле
Связь
*/
связи по Uy во всех узлах
*/
0.12 0.12
Нагрузка на обрез фундамента
*/
q=50 т на пм
*/
Собственный вес бетонного ф-та */
Горизонтальная нагрузка на ф-т */
Величина нагрузки на обрез ф-та*/
Величина собств. веса и гор.наг*/
Рис. 7.7.1. Расчётная схема
Рис. 7.7.2. КЭ схема
137
151 152 153 154 155
146 147 148 149 150
141 142 143 144 145
136 137 138 139 140
131 132 133 134 135
126 127 128 129 130
121 122 123 124 125
116 117 118 119 120
111 112 113 114 115
106 107 108 109 110
101 102 103 104 105
96 97 98 99 100
91 92 93 94 95
86 87 88 89 90
81 82 83 84 85
76 77 78 79 80
61
62
63
64
65
66 67 68 69 70
71
72
73
74
75
46
47
48
49
50
51 52 53 54 55
56
57
58
59
60
31
32
33
34
35
36 37 38 39 40
41
42
43
44
45
16
17
18
19
20
21 22 23 24 25
26
27
28
29
30
1
2
3
4
5
6
11
12
13
14
15
7
8
9
10
Рис. 8.7.3. Деформированная схема
В
примере
признак
системы принят – 2.
Фундамент смоделирован
КЭ
№21
"Прямоугольный
элемент балки-стенки". КЭ
№21
воспринимает:
нормальные напряжения σX,
σZ и σY, а также сдвигающее
напряжение
XZ.
Здесь
использован
2
вариант
задания
жесткостных
характеристик
(изотропное
тело)
с
использованием
идентификаторов GEI и PD
(см.п.3.2.6).
Фундамент работает в
условиях
плоско
деформированного состояния
σY ≠ 0.
Для снижения порядка
решаемой системы уравнений
запрещаем перемещения по
направлению UY.
Рис. 7.7.4. Изополе напряжений σX
σX,max=225.331 т/м2; σX,min= – 254.956 т/м2
138
Упругое основание под фундамент смоделировано КЭ №51
RZ=100 т (см. п.6.12).
28.
Расчёт выполнен на ПК "МИРАЖ". В результате расчёта получены
перемещения узлов (деформированную схему см. рис.7.7.3) и напряжения в
элементах (табл. 7.7.2 и рис.7.7.3).
28.01
28.02 Таблица 7.7.1
(a) Перемещения узлов
-------------------------------------------------------------------------------|
1
2
3
4
5
6
7
8
9
|
-------------------------------------------------------------------------------| X
-0.0706 -0.0686 -0.0646 -0.0573 -0.0451 -0.0291 -0.0143
0.0066 |
| Z
-6.1152 -5.7559 -5.3930 -5.0285 -4.6586 -4.2789 -3.9530 -3.6187 -3.2790 |
-------------------------------------------------------------------------------|
154
155
|
-------------------------------------------------------------------------------| X
-8.9790 -8.9827
|
| Z
-3.3203 -2.8939
|
--------------------------------------------------------------------------------
Максимальная осадка фундамента в узле №1. ΔZ,max= – 6.115 мм, а
максимальное горизонтальное смещение обреза фундамента в узле
№155. ΔX,max= – 8.983 мм.
28.03
28.04 Таблица 7.7.2
(a) Напряжения в элементах
---------------------------------------------------------------------| 21_
1-1
2-1
3-1
4-1
5-1
6-1
7-1 |
|
1
2
3
4
5
6
7
|
|
2
3
4
5
6
7
8
|
---------------------------------------------------------------------| NX
11.3303 42.7476 90.3071 152.017 205.152 225.331 208.517|
| NY
-12.6133 .867235 9.95220 22.0645 31.8876 35.8731 34.1886|
| NZ
-74.3972 -38.4114 -40.5460 -41.6946 -45.7147 -45.9654 -37.5737|
| TXZ -13.8604 -16.3955 -28.8468 -32.1666 -18.7633 1.79846 10.6811|
---------------------------------------------------------------------| 51_
121-1
122-1
123-1
124-1
125-1
126-1
127-1 |
|
1
2
3
4
5
6
7
|
---------------------------------------------------------------------| RZ
-.611871 -.575799 -.539378 -.502806 -.465719 -.427680 -.395074|
----------------------------------------------------------------------
Максимальные растягивающие (поперечные) напряжения в
подошве фундамента в элементе №6 (находящийся в пределах узлов
6, 7, 21, 22) σX,6= 225.331 т/м2. В отличие от таблицы напряжений
предыдущего примера в табл. 7.7.2 присутствует дополнительный
компонент напряжений, присущий плоско деформируемым системам –
σY, продольные напряжения в фундаменте (без учёта напряжений в
фундаменте при работе на изгиб как балки). Так σY,6 = 35.873 т/м2.
Зная реакции связей (КЭ №51) можно получить напряжения под
подошвой фундамента. Максимальная реакция связи в элементе
№121, который имеет узел 1 – RZ,121 =. Тогда максимальное
напряжение под подошвой σФ = 0.612/0.1/0.12 = 51 т/м2.
139
7.8. Моделирование расчётных схем с использованием
специальных систем координат
А. Расчёт цилиндрического резервуара
2
q z = 0.5 т/м
H=8м
qz = 0
q т, мах = 8 т/м
q т,мах = 8 т/м 2
5м
Рис. 8.8.1. Расчётная схема
Рис. 8.8.2. Конечно-элементная схема
140
= 200 мм
2
В железобетонном монолитном резервуаре высотой H=8 м и
диаметром D=5 м (рис. 7.8.1) определить максимальное
горизонтальное перемещение стенки резервуара и максимальные
горизонтальные растягивающие напряжения в стенке резервуара.
Нагрузка от собственного веса q=0.5 т/м2; действует в плоскости
стены резервуара. Гидростатическое давление, действующее изнутри
резервуара (радиально направлена) имеет максимум внизу pГ,MAX=8
т/м2 и минимум pГ,MIN=0 т/м2 вверху резервуара. Модуль упругости
E=24·105 т/м2, коэффициент Пуассона =0.2, толщина стенки =20
см. Материал резервуара обладает изотропными свойствами.
Текст исходных данных для расчёта выглядит так:
(0/1;ПРИМЕР-8/3;11 1-132/) /*
(1/41 1 1 2 13 14/
/*
R 1 10/0 0 1 1 1 1/
/*
41 1 12 1 24 13/
/*
R 12 9/0 0 12 12 12 12/)/*
(3/1 24E5 0.2 0.2/)
/*
(4/2.5/R 1 11/0 30/
/*
R 12 10/0 0 .8/)
/*
(5/1 1 2 3/R 1 11/1/)
/*
(6/1 16 3 1 1/R 1 119/1/
/*
1 6 3 11 1/R 1 11/1/
/*
R 12 9/12 0 0 -1/)
/*
(7/1 .5/
/*
2 -.4/3 -1.2/4 -2/5 -2.8//*
6 -3.6/7 -4.4/8 -5.2/
/*
9 -6/10 -6.8/11 -7.6/)
/*
Цилиндрич. система координат
*/
КЭ №41 [элемент оболочки]
*/
повторить 1 строку 10 раз
*/
стыковой элемент [по кольцу]
*/
повторить 12 строк 9 раз
*/
Жесткость для изотропного эл-та*/
Координаты 1...12 узел
*/
Координаты 13...132 узел
*/
связи по X,Y,Z внизу резервуара*/
Нагрузка от собств. веса резерв*/
Гидростат. нагр. на нижний ярус*/
Гидростат. нагр. на верхн.ярусы*/
Вес стены резервуара t=20 см
*/
Величины нагрузки от гидростат.*/
давления изнутри резервуара
*/
по ярусам
*/
В примере признак системы принят – 5 (по умолчанию). Система
координат – цилиндрическая, полярный угол задан в градусах (см.
п.2.3.4.1). Резервуар смоделирован КЭ №41 "Прямоугольный элемент
оболочки". КЭ №41 воспринимает: нормальные напряжения σX, σZ,
сдвигающее напряжение XZ, изгибающие моменты MX, MY, MXY,
перерезывающие силы QX, QY.
В результате расчёта имеем
28.05
28.06 Таблица 7.8.1
(a) Перемещения узлов резервуара
(b)
-------------------------------------------------------------------------------|
10
11
12
13
14
15
16
17
18
|
-------------------------------------------------------------------------------| X
0.0980 0.0849 0.0490
-0.0490 -0.0849 |
| Y
0.0490 0.0849 0.0980 0.0849 0.0490 |
| Z
-0.0092 -0.0092 -0.0092 -0.0092 -0.0092 -0.0092 |
| UX
0.2160 0.1871 0.1080
-0.0181 -0.0315 -0.0363 -0.0315 -0.0181 |
| UY
0.1080 0.1871 0.0363 0.0315 0.0181
-0.0181 -0.0315 |
--------------------------------------------------------------------------------
Максимальное горизонтальное смещение стенки резервуара в узле
№15. ΔX,max = ΔX,15= 0.049 мм. Нужно отметить, что радиальное
смещение всего яруса узлов равно Δρ,max = ΔX,15= 0.049 мм.
141
Рис. 7.8.3. Деформированная схема
29.
Рис. 7.8.4. Изополе напряжений σX
σX,max=87.424 т/м2; σX,min= 5.889 т/м2
142
29.01 Таблица 7.8.2
(a) Напряжения в элементах резервуара
-------------------------------------------------------------------------------| 41_
10-1
11-1
12-1
13-1
14-1
15-1
16-1
17-1
18-1 |
|
10
11
12
13
14
15
16
17
18
|
|
11
12
1
14
15
16
17
18
19
|
-------------------------------------------------------------------------------| NX
43.284 43.284 43.284 87.423 87.423 87.423 87.423 87.423 87.423 |
| NY
-19.000 -18.999 -19.000 -16.999 -17.000 -16.999 -16.999 -17.000 -16.999 |
| MX
-0.0723 -0.0723 -0.0723 -0.0269 -0.0269 -0.0269 -0.0269 -0.0269 -0.0269 |
| MY
-0.3616 -0.3616 -0.3616 -0.1346 -0.1345 -0.1346 -0.1346 -0.1345 -0.1346 |
| QY
0.1092 0.1092 0.1092 0.3517 0.3517 0.3517 0.3517 0.3517 0.3517 |
--------------------------------------------------------------------------------
Максимальные
горизонтальные
растягивающие
(тангенциальные) напряжения в стенке резервуара в элементах №13
… 24 σX,MAX = σX,13 = 87.423 т/м2. В силу равенства нулю в таблице
отсутствуют следующие компоненты: сдвигающее напряжение XY,
изгибающий момент MXY и перерезывающая сила QY.
Б. Расчёт купола
5
q z = 1.5 т/м 2
10
Рис. 8.8.4. Расчётная схема купола
Рис. 8.8.4. Конечно-элементная схема
143
В
железобетонном
монолитном
куполе
высотой
H=5
м
и
диаметром D=10 м (рис.
7.8.4)
определить
максимальный
прогиб
купола и максимальные
горизонтальные
растягивающие
напряжения
в
его
элементах.
На купол действует
вертикальная
распределённая нагрузка
q=1.5
т/м2.
Модуль
упругости E=21·105 т/м2,
коэффициент Пуассона
=0.2, толщина стенки
=3 см. Материал
резервуара
обладает
изотропными свойствами.
Текст
исходных
данных
для
расчёта
выглядит так:
(0/1;ПРИМЕР-8а/3;12 1-61/)
(1/44 1 1 2 13 14/
R 1 10/0 0 1 1 1 1/
44 1 12 1 24 13/
R 12 3/0 0 12 12 12 12/
42 1 49 50 61/
R 1 10/0 0 1 1/
42 1 60 49 61/)
(3/1 21e5 .2 .03/)
(4/5 0 90/R 1 11/0 30/
R 12 4/0 0 -18/5/)
(5/1 3/R 1 11/1/61 1 2 6/)
(6/1 16 3 1 1/R 1 59/1/)
(7/1 1.5/)
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
/*
Сферическая система координат */
КЭ №44 [элемент оболочки]
*/
повторить 1 строку 10 раз
*/
стыковой элемент [по 1 ярусу] */
повторить 12 строк 3 раза
*/
КЭ №42 [элемент оболочки 3 уз.]*/
повторить 1 строку 10 раз
*/
стыковой элемент [по 5 ярусу] */
Жесткость для изотропного эл-та*/
Координаты 1...12 узел
*/
Координаты 13...61 узел
*/
связи по Z внизу, XYUZ в 61 уз.*/
Нагрузка на весь купол [Общ.] */
Величина нагрузки на элемент
*/
Загру жение 1
В примере признак
системы принят – 5 (по
умолчанию).
Система
координат – сферическая.
Полярный угол и угол
наклона
радиуса
от
вертикальной
оси
заданы в градусах (см.
п.2.3.4.2).
Купол
Рис. 7.8.5. Деформированная схема купола
смоделирован КЭ №44
"Четырёхугольный элемент
оболочки" и КЭ №42 "Треугольный элемент оболочки". КЭ №44 и 42
воспринимают те же усилия и напряжения что и элемент №41. В
результате расчёта имеем:
Z
X
Рис. 7.8.6. Изополе напряжений σX
144
σX,max=165.56 т/м2
29.02 Таблица 7.8.3
(a) Перемещения узлов купола
-------------------------------------------------------------------------------|
55
56
57
58
59
60
61
|
-------------------------------------------------------------------------------| X
0.0643 0.0557 0.0321
-0.0321 -0.0557
|
| Y
0.0321 0.0557 0.0643 0.0557 0.0321
|
| Z
-0.9403 -0.9403 -0.9403 -0.9403 -0.9403 -0.9403 -0.9698
|
| UX
3.0067 5.2077 6.0134 5.2077 3.0067
|
| UY
-6.0134 -5.2077 -3.0067
3.0067 5.2077
|
--------------------------------------------------------------------------------
Максимальное вертикальное смещение купола в узле №61. ΔX,max =
ΔX,61= - 0.97 мм.
29.03 Таблица 7.8.4
(a) Напряжения в элементах купола
-------------------------------------------------------------------------------| 44_
1-1
2-1
3-1
4-1
5-1
6-1
7-1
8-1
9-1 |
|
1
2
3
4
5
6
7
8
9
|
|
2
3
4
5
6
7
8
9
10
|
-------------------------------------------------------------------------------| NX
165.56 165.56 165.56 165.56 165.56 165.56 165.56 165.56 165.56 |
| NY
-213.29 -213.29 -213.29 -213.29 -213.29 -213.29 -213.29 -213.29 -213.29 |
| TXY -0.0000 0.0001 -0.0000 -0.0000 0.0001 -0.0000 -0.0000 0.0001 -0.0000 |
| MX
0.0004 0.0004 0.0004 0.0004 0.0004 0.0004 0.0004 0.0004 0.0004 |
| MY
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 |
| QY
-0.0589 -0.0589 -0.0589 -0.0589 -0.0589 -0.0589 -0.0589 -0.0589 -0.0589 |
--------------------------------------------------------------------------------
Максимальные
горизонтальные
растягивающие
(тангенциальные) напряжения в куполе в элементах №1 … 12. σX,MAX =
σX,1 = 165.56 т/м2.
7.9. Моделирование конструкции пространственными
конечными элементами
С помощью пространственных КЭ возможно определение
напряженно-деформированного
состояния
массивных
пространственных конструкций из однородного (по направлению
любой из осей X1, Y1, Z1 элемента) изотропного материала, в
постановке трёхмерной задачи теории упругости.
В каждом из узлов пространственных КЭ имеется по три степени
свободы U, V, W, представляющие собой линейные перемещения
вдоль осей X1, Y1, Z1.
В примере предлагается рассчитать массивную конструкцию,
расчётная схема которой показана на рис. 7.9.1. Определить
максимальное
вертикальное
перемещение
и
Максимальное
нормальное сжимающее вертикальное напряжение.
Объёмный вес конструкции, выполненной из железобетона –
q=2.75 т/м3. Модуль упругости E=14·105 т/м2, коэффициент Пуассона
=0.2.
145
q Z = 2.75 т/м3
1,62
0,54
P = 50 т
0,6
0,6
1,2
1,4
Рис. 7.9.1. Расчётная схема
Рис. 7.9.2. КЭ схема
Текст исходных данных для расчёта выглядит так:
(0/1;ПРИМЕР-9/2;4/
/* Признак схемы - 4 [X, Y, Z]
*/
38;200:1-4 8-11 15-18
43-46 50-53 57-60
85-88 92-95 99-102
127-130 134-137 141-144
169-172 176-179 183-186
211-214 218-221 225-228/) /* Удаление эл-тов из схемы */
(1/31 1 1 2 9 10/
/* КЭ №31 [пространственный
*/
0 0 57 58 65 66/
/*
параллелепипед]
*/
R 2 6/0 0 1 1 1 1/
/* повтор. 2 стр. 1-го эл-та 6 раз*/
R 14 5/0 0 8 8 8 8/
/* повторим 14 стр. 7 эл-тов 5 раз*/
R 84 8/0 0 56 56 56 56/)/* повторим 84 стр. 42 эл-тов 8раз*/
(3/1 14E5 0.2/)
/* Жесткость для изотропного эл-та*/
(4/0/R 1 7/.2/
/* Координаты 1...8 узел
*/
R 8 6/0 .2/
/* Координаты 9...56 узел
*/
R 56 9/0 0 .18/)
/* Координаты 13...560 узел
*/
(5/1 1 2 3/R 1 55/1/
/* Связи X, Y, Z по нижним узлам */
57 1 2 3/R 1 3/1/R 4 2/8//* Связи X, Y, Z по узлам не
*/
R 12 4/56/)
/* используемым в расёте
*/
(6/1 16 3 1 1/R 1 377/1/
/* Нагрузка от собственного веса */
505 0 3 2 1/)
/* Сосредоточ. вертикальная сила */
(7/1 2.75 0/
/* Объёмный вес железобетона
*/
2 50/)
/*
Сила
*/
Система координат – декартова (по умолчанию). В примере
признак системы принят – 4. Схема, каждый узел которой содержит
три степени свободы – линейные перемещения вдоль осей X; Y, Z.
Конструкция смоделирована КЭ №31 "Пространственный элемент в
форме параллелепипеда". КЭ №31 воспринимает: нормальные
напряжения σX, σY, σZ, сдвигающие напряжение XY, XZ, YZ.
146
Здесь использован 1
вариант
задания
жесткостных
характеристик (изотропное
тело) без использования
служебной
информации
(идентификаторов)
см.
п.3.3.5.
В строке 1 документа 7
символ нуля означает, что
нагрузка распределена по
объёму
конечного
элемента (см. табл. 3.6).
Каждый узел КЭ №31
имеет
3
линейных
перемещения.
Для
придания
необходимой
формы
Рис. 7.9.3. Деформированная схема
конструкции удалим часть
элементов используя строку 38 документа 0. Для снижения порядка
системы уравнений запретим перемещения по всем освободившимся,
в результате удаления элементов, узлам.
30.
В результате расчёта имеем (деформированная схема конструкции
приведена на рис. 7.9.3):
Рис. 7.9.4. Изополе напряжений σZ
147
σZ,max= – 1435.38 т/м2
30.01 Таблица 7.9.1
(a) Перемещения узлов
-------------------------------------------------------------------------------|
504
505
506
507
508
509
510
511
512
|
-------------------------------------------------------------------------------| X
-0.3008 -0.8112 -0.6112 -0.4879 -0.4371 -0.3917 -0.3557 -0.3368 -0.3323 |
| Y
-0.3258 -1.0509 -0.7834 -0.6313 -0.5464 -0.4780 -0.4303 -0.3998 -0.3812 |
| Z
0.2877 -2.6050 -1.1124 -0.8645 -0.5995 -0.4057 -0.2638 -0.1608 -0.0692 |
--------------------------------------------------------------------------------
Максимальную вертикальную деформацию конструкции имеем в
узле №505. ΔZ,max= – 2.605 мм.
30.02 Таблица 7.9.2
(a) Напряжения в элементах
-------------------------------------------------------------------------------| 31_
334-1
335-1
336-1
337-1
338-1
339-1
340-1
341-1
342-1 |
|
437
438
439
449
450
451
452
453
454
|
|
438
439
440
450
451
452
453
454
455
|
-------------------------------------------------------------------------------| NX
9.3715 9.0845 3.1399 128.56 292.17 223.14 210.79 172.72 92.916 |
| NY
1.6730 0.6761 1.0127 140.87 101.16 16.835 21.389 15.846 8.9586 |
| NZ
49.546 55.093 58.738 -1435.3 162.90 -17.305 -16.506 -27.800 -13.702 |
| TXY
11.895 7.2376 0.8285 281.50 204.40 125.75 92.086 59.106 29.863 |
| TXZ -82.516 -57.466 -22.107 567.55 16.910 93.835 71.608 16.136 -23.202 |
| TYZ -21.702 -16.808 -17.187 581.74 -84.637 14.755 0.7622 -3.2635 -4.3574 |
--------------------------------------------------------------------------------
Максимальные
вертикальные
сжимающие
напряжения
в
рассчитываемой конструкции имеем в элементе №337 (находящийся в
пределах узлов 449, 450, 457, 458, 505, 506, 513, 514) σX,337 = 1435.3
т/м2.
7.10. Расчёт рамы на заданные перемещения
Необходимо отметить, что выполнение данного расчёта несколько
отличается при использовании ПК "МИРАЖ" и "Лира-Windows",
поэтому рассмотрим 2 варианта задания исходных данных.
1
1
50 мм
1
10
2
5
5
Рис. 7.10.1. Расчётная схема
Рис. 7.10.2. Деформированная схема
148
Рассчитать раму, расчётная схема которой показана на рис. 7.10.1.
Определить максимальный изгибающий момент в раме, а также
максимальное горизонтальное перемещение при просадке опоры
средней стойки на 5 см.
Сечения элементов стоек принять по типу 1, для ригеля тип 2 (см.
рис.7.10.3). Модуль упругости E=23·105 т/м2.
Тип 1
Тип 2
b=5 см, h=40 см
b1= b2 =30 см, h1= h2= 5 см
b=10 см, h=50 см,
b1=30 см, h1=10 см
Рис.7.10.3. Поперечные сечения рамы
Текст исходных данных для расчёта на ПК "МИРАЖ" и "ЛираWindows 5.03" выглядит так (вариант 1):
(0/1;ПРИМЕР-10/2;2/)
/*
(1/2 1 1 2/
/*
R 1 3/0 0 1 1/2 1 5 16/ /*
R 5 2/0 0 5 5/
/*
2 2 16 17/R 1 9/0 0 1 1/ /*
154 3 6 27/)
/*
(3/1 S3 23E5 5 40 30 5 30 5//*
2 S2 23E5 10 50 30 10/
/*
3 1 1 1/)
/*
(4/0/R 1 4/0 0 1/
/*
R 5 2/5/
/*
0 0 5/R 1 10/1/
/*
5 0 -0.01/)
/*
(5/1 1 3 5/11 1 3 5/
/*
6 1 5/R 1 4/1/21 1 5)
/*
(6/26 11 1 1 1/
/*
(7/1 0.05/)
/*
Признак схемы - 2 [X, Z, Uy] */
КЭ №2 [плоский рамный стержень]*/
повтор. 1 стр. 3 раза, 6 эл-т */
повторим 5 стр. 2 раза
*/
зададим ригель [тип жестк. 2] */
зададим 0 эл-т [тип жестк. 3] */
Двутавр
*/
Тавр с полкой вверху
*/
жесткости по X,Z,Uy не равны 0 */
Координаты 1...5 узел
*/
Координаты 6...15 узел
*/
Координаты 16...26 узел
*/
Координаты 27 свободного узела */
Связи по X,Z,Uy в узлах 1 и 11 */
Связи по X,Uy в средней стойке */
Задание перемещения 26 эл-та
*/
Величина задаваемого перемещ. */
Система координат – декартова (по умолчанию). В примере
признак системы принят – 2. Рама смоделирована КЭ №2 "Плоский
рамный стержень". Здесь для расчёта рамы на заданное
перемещение использован специальный КЭ №154 (см. п.6.7).
Особенности задания исходной информации для него указаны в
п.3.4.3.
В "Лира-Windows" для расчёта на заданные перемещения нет
необходимости использовать КЭ №154. Для версий "Лира-Windows" 8
и старше использование КЭ №154 для этих целей не допускается.
Текст исходных данных для расчёта в этом случае выглядит так
(вариант 2):
149
0/1;ПРИМЕР-10a/2;2/)
/*
(1/2 1 1 2/
/*
R 1 3/0 0 1 1/2 1 5 16/ /*
R 5 2/0 0 5 5/
/*
2 2 16 17/R 1 9/0 0 1 1/)/*
(3/1 S3 23E5 5 40 30 5 30 5//*
2 S2 23E5 10 50 30 10/) /*
(4/0/R 1 4/0 0 1/
/*
R 5 2/5/
/*
0 0 5/R 1 10/1/)
/*
(5/1 1 3 5/11 1 3 5/
/*
6 1 5/R 1 4/1/21 1 5)
/*
(6/6 60 3 1 1/
/*
(7/1 -0.05/)
/*
Признак схемы - 2 [X, Z, Uy] */
КЭ №2 [плоский рамный стержень]*/
повтор. 1 стр. 3 раза, 6 эл-т */
повторим 5 стр. 2 раза
*/
зададим ригель [тип жестк. 2] */
Двутавр
*/
Тавр с полкой вверху
*/
Координаты 1...5 узел
*/
Координаты 6...15 узел
*/
Координаты 16...26 узел
*/
Связи по X,Z,Uy в узлах 1 и 11 */
Связи по X,Uy в средней стойке */
Задание перемещения 6-го узла */
Величина задаваемого перемещ. */
Здесь для расчёта рамы на заданное перемещение использованы
только документы 6 и 7. В документе 6 признак нагрузки принят 60.
Направление смещения узла и величина смещения задаются
аналогично заданию узловой силовой нагрузки.
31.
Способ задания исходных данных (а также расчёт при помощи ПК "МИРАЖ"
или "ЛИРА-Windows") на результатах расчёта не отражается, поэтому для обоих
вариантов имеем (деформированная схема конструкции приведена на рис.
7.10.2):
Рис. 7.10.4. Эпюра МY (МY,max=30.355 т*м)
31.01 Таблица 7.10.1
(a) Перемещения узлов рамы
-------------------------------------------------------------------------------|
12
13
14
15
16
17
18
19
20
|
-------------------------------------------------------------------------------| X
1.4127 4.2320 6.3290 5.5753 .15774 .12619 .09464 .06309 .03154 |
| Z
-.09143 -.18286 -.27429 -.36572 -.45716 -11.231 -24.005 -36.255 -45.457 |
| UY
2.4707 2.8129 1.0264 -2.8886 8.9323 12.195 12.933 11.146 6.8356 |
-------------------------------------------------------------------------------|
21
22
23
24
25
26
|
-------------------------------------------------------------------------------|
1 |
| X
-0.0315 -0.0630 -0.0946 -0.1261 -0.1577
|
| Z
-49.085 -45.457 -36.255 -24.005 -11.231 -0.4571
|
| UY
-6.8356 -11.146 -12.933 -12.195 -8.9323
|
--------------------------------------------------------------------------------
Максимальные горизонтальные смещения имеют узлы №16 и №
26. ΔX,max= 0.158 мм.
150
31.02 Таблица 7.10.2
(a) Усилия в элементах рамы
-------------------------------------------------------------------------------|
2_
19-1
19-2
20-1
20-2
21-1
21-2
22-1
22-2
23-1 |
|
19
19
20
20
21
21
22
22
23
|
|
20
20
21
21
22
22
23
23
24
|
-------------------------------------------------------------------------------| N
-5.0794 -5.0794 -5.0794 -5.0794 -5.0794 -5.0794 -5.0794 -5.0794 -5.0794 |
| M
11.428 20.891 20.891 30.354 30.354 20.891 20.891 11.428 11.428 |
| Q
9.4632 9.4632 9.4632 9.4632 -9.4632 -9.4632 -9.4632 -9.4632 -9.4632 |
-------------------------------------------------------------------------------| 154_
26-1
|
|
6
|
|
27
|
-------------------------------------------------------------------------------| N
18.926
|
--------------------------------------------------------------------------------
Максимальный изгибающий момент MY имеем в элементах №20
(конец) и №21 (начало). MY,max = 30.354 т*м (см.рис.7.10.4).
Кроме того, в КЭ №26 (нуль элемент) определили продольное
усилие в средней стойке (только для ПК "МИРАЖ" и "Лира-Windows
5.03") при смещении её опоры 5 см. N=18.926 т.
7.11. Расчёт коробки методом суперэлементов
В трёхэтажной коробке
(из
стеновых
панелей)
P = 25 т
опёртой по углам (рис.
P = 25 т
2
7.11.1)
определить
q э = 0.55 т/м
максимальное вертикальное
P = 25 т
перемещение углов коробки
и
максимальные
нормальные
сжимающие
вертикальные напряжения в
передней стенке коробки.
1,2
Нагрузка действует в
плоскости
стен
коробки
1,2
(собственный
вес)
–
равномерно распределена
1,2
q=0.5 т/м2. Коэффициент
1,2
надёжности
для
собственного веса γf=1.1.
Модуль упругости E= 19·105
8
,
4
4,8
т/м2, коэффициент Пуассона
=0.2, толщина панели
Рис. 7.11.1. Расчётная схема
=8 см.
Разобьём коробку на 12
одинаковых подсхем (суперэлементов). В основной схеме обозначим
и пронумеруем суперузлы (см.рис.7.11.2).
3
3
3
0,75 1,5 1,5 1,5 1,5 1,5 0,75
P = 25 т
151
205
204
203
202
201
200
199
198
2 0168 0
207
176
195
172
208
177
173
169
165
161
157
145
85
122
117
113
109
105
97
142
187
141
188
91
62
2664
63
57
126
127
128
95
78
77
7659
129
55
75
114
51
74
47
110
73
43
106
24
23
66
98
2 1 9 42700
22
67
68
72
39
71
35
19
18
17
16
69
58
15
54
14
50
29
13
46
30
41
12
42
31
38
3 33 2
1
99
118
45
37
103
132
131
158
8 1 1 581403 0 7 9
82
115
107
133
162
83
137
111
134
166
28
49
135
170
27
53
189
102
65
138
119
136
174
36
25
155
114900 1 3 9
178
40
9 39 2
61
186
84
1 2 3 8162640 1 2 5
56
87
52
88
48
89
44
90
101
143
96
1 5135 2
121
144
1 8 2 1 8 3 11481642 0 1 8 5
116
147
112
148
108
149
104
150
100
151
159
191
156
212
163
192
160
211
181
167
193
164
210
175
171
194
168
209
197
179
196
11
3 41 0
2
3
4
5
6
7
8
9
Каждый суперэлемент представляет собой стеновую панель с
проёмом. Расчётная схема панели показана на рис.7.6.1.
Текст исходных данных суперэлемента (исходные данные мало,
чем отличаются от примера рассматриваемого в п.7.6) выглядит так:
(0/1;СУПЕРЭЛЕМЕНТ/2;1/
/* Признак схемы - 1 [X, Z]
*/
36;1 9 73 2-8 74-81 10 R 64 9 18 R 72 9/ /* Суперузлы
*/
38;200:19-22 27-30 35-38 43-46/) /* Исключить элементы:
*/
/* 19-22 27-30 35-38 43-46
*/
(1/21 1 1 2 10 11/
/* КЭ №21 [балка-стенка]
*/
R 1 7/0 0 1 1 1 1/
/* повторить 1 строку 7 раз
*/
R 8 7/0 0 9 9 9 9/)
/* повторить 8 строк 7 раз
*/
(3/1 18E5 0.2 0.08/)
/* E=18E5 т/м.кв., Мю=0.2, t=0.08м*/
(4/0 0 0/R 1 8/.6/
/* Координаты 1...9 узел
*/
R 9 8/0 0 .375/)
/* Координаты 10...81 узел
*/
(5/31 1 3/R 1 2/1/
/* Запретить перемещения узлов
*/
R 3 2/9/)
/* находящихся в проёме панели
*/
(6/1 6 3 1 1/R 1 63/1/)
/* Распредел. нагрузка на панель */
(7/1 0.5/)
/* Величина нагрузки q=0.5 т/м.кв */
В исходных данных суперэлемента в строке 36 документа 0
указаны 32 узла, находящиеся на контуре панели, по которым
осуществляется стыковка с другими панелями (суперузлы) в основной
системе, при чём первые три узла (1, 9 и 73) являются базисными
(см.п.5.2.1).
Текст исходных данных основной схемы для расчёту методом
суперэлементов выглядит так:
Рис. 7.11.2. Супер-элементная схема
Рис. 7.11.3. Конечно-элементная схема
152
(0/1;ПРИМЕР-11/2;4/
/* Признак схемы - 4 [X, Y, Z]
*/
38;1:Собственный вес панели;
2:Узловая нагрузка/) /* Наименование загружений
*/
(1/2001 1 1 9 61/
/* СЭ №2001 [суперэлемент тип 1] */
R 1 2/0 0 60 60 60/
/* повтор. 1 стр. 2 раза
*/
R 3 1/0 0 24 8 24/
/* повтор. 3 стр. 1 раз
*/
2001 1 9 17 69/
/* СЭ №2001 [суперэлемент тип 1] */
R 1 2/0 0 60 60 60/
/* повтор. 1 стр. 2 раза
*/
R 3 1/0 0 -8 8 -8/)
/* повтор. 3 стр. 1 раз
*/
(3/1 PSE=5 32 TSE=t-11a/)
/* СЭ находится в файле t-11a.txt */
(4/0/R 1 8/.6/R 1 8/0 .6/
/* Координаты
1...17 узел
*/
R 1 8/-.6/R 1 7/0 -.6/
/* Координаты 18...32 узел
*/
0 0 .375/4.8 0 .375/
/* Координаты 33 34 узлов
*/
4.8 4.8 .375/0 4.8 .375//* Координаты 35 36 узла
*/
R 4 6/0 0 .375/
/* Координаты 37...60 узел
*/
R 60 2/0 0 3/
/* Координаты 61...180 узел
*/
R 32 1 1/0 0 9/) /* Координаты 181...212 узел
*/
(5/1 3/R 1 3/8/
/* Связи по Z в узлах 1 9 17 25
*/
1 1 2/9 2/25 1/
/* Связи по X,Y в 1, Y в 9, X в 25*/
2 2/R 1 6/1/18 2/R 1 6/1/ /* Связи по Y на внутренние узлы */
R 14 3/60/
/* передней и задней стен
*/
10 1/R 1 6/1/26 1/R 1 6/1//* Связи по X на внутренние узлы */
R 14 3/60/)
/* боковых стен
*/
(6/1 50 1 1 1/R 1 11/1/
/* Собственный вес ЖБ панелей
*/
181 0 3 2 2/R 1 3/8/
/* Узловая нагрузка по 4-м узлам */
(7/1 1.1/
/* Коэфф. увелич. нагрузки на SU */
2 25/)
/* Величина узловой нагрузки
*/
Здесь признак системы принят – 4. Схема, каждый узел которой
содержит три степени свободы – три линейные перемещения вдоль
осей: X; Y и Z.
Коробка смоделирована одним типом суперэлементов №2001
текст исходных данных которого находится в файле t-11a.txt. Каждый
узел СЭ №2001, в соответствии со строкой 2 документа 0 СЭ, имеет 2
линейных перемещения в его плоскости, поэтому перемещения в
основной системе из плоскости СЭ можно запретить (без ущерба для
результатов расчёта) тем самым понизится порядок решаемой
системы уравнений.
В загружении 1 документа 6 задан собственный вес панелей с
учётом коэффициента перегрузки (строка 1 документа 0) заданным как
переходной коэффициент к нагрузке на панель, указанной в документе
7 СЭ. В загружении 2 описаны узловые нагрузки по верхним углам
коробки.
Особенности задания исходных данных для расчёта МСЭ
приведены в п.5.3. В результате расчёта имеем:
153
Рис. 7.11.2. Изополе напряжений σZ (загружение 1)
σZ,max= – 219.49 т/м2
31.03 Таблица 7.11.1
(a) Перемещения узлов
-------------------------------------------------------------------------------|
173
174
175
176
177
178
179
180
181
|
-------------------------------------------------------------------------------|
1 – СОБСТВЕННЫЙ ВЕС ПАНЕЛИ
|
| X
0.1729 0.1743 0.1743 0.1729 0.1761 0.1711 0.1711 0.1761 0.1796 |
| Y
0.1729 0.1729 0.1743 0.1743 0.1761 0.1761 0.1711 0.1711 0.1796 |
| Z
-0.4465 -0.4465 -0.4465 -0.4465 -0.4465 -0.4465 -0.4465 -0.4465 -0.4465 |
|
2 – УЗЛОВАЯ НАГРУЗКА
|
| X
0.2532 0.2170 0.2170 0.2532 0.1807 0.2895 0.2895 0.1807
|
| Y
0.2532 0.2532 0.2170 0.2170 0.1807 0.1807 0.2895 0.2895
|
| Z
-0.9938 -0.9938 -0.9938 -0.9938 -1.1020 -1.1020 -1.1020 -1.1020 -1.2530 |
--------------------------------------------------------------------------------
Максимальное вертикальное перемещение углов верха коробки
(основная схема) имеем в узлах №181, 189, 197, 205. Для первого
загружения – ΔZ,(1),181= – 0.447 мм, для второго – ΔZ,(2),181= – 1.253 мм.
31.04 Таблица 7.11.2
(a) Напряжения в элементах
-------------------------------------------------------------------------------|
T-11A
суперэлемент 1 типа 1
|
-------------------------------------------------------------------------------| 21_
1-1
2-1
3-1
4-1
5-1
6-1
7-1
8-1
9-1 |
|
1
2
3
4
5
6
7
8
10
|
|
2
3
4
5
6
7
8
9
11
|
-------------------------------------------------------------------------------|
1- СОБСТВЕННЫЙ ВЕС ПАНЕЛИ
|
| NX
45.614 82.475 74.787 83.405 83.405 74.787 82.475 45.614 -13.384 |
| NZ
-219.49 38.703 .26226 .06417 .06417 .26226 38.703 -219.49 -195.82 |
| TXZ -55.818 28.861 -5.4712 -3.2854 3.2854 5.4712 -28.861 55.818 -49.337 |
|
2- УЗЛОВАЯ НАГРУЗКА
|
| NX
65.501 118.10 98.845 99.801 99.801 98.845 118.10 65.501 -20.001 |
| NZ
-309.27 50.873 -2.0731 .05849 .05849 -2.0731 50.873 -309.27 -278.56 |
| TXZ -79.975 41.019 -.73526 -1.0544 1.0544 .73526 -41.019 79.975 -70.592 |
-------------------------------------------------------------------------------154
Максимальные нормальные сжимающие вертикальные напряжения
в передней стенке в суперэлементе 1 элементах №1 и 8. Для первого
загружения – σZ,(1),1= 219.49 т/м2 (изополе напряжений показано на
рис. 7.11.2), для второго – σZ,(2),1= 309.27 т/м2.
3
3
7.12. Расчёт многоэтажной рамы на сейсмическое воздействие
2
1
6
3
3
3
3
3
q м = 6 т/м
6
В шестиэтажной железобетонной раме необходимо определить
максимальное горизонтальное перемещение, а также максимальные
усилия в стойках от сейсмического воздействия. Определить
инерционные силы в каждом узле, собственные значения, частоты,
периоды и формы колебаний рамы.
Направление сейсмического воздействия – вдоль оси X. Площадка
строительства расположена в 8-и бальной зоне.
Расчётная схема рамы показана на рис. 7.12.1. Сечения элементов
стоек – прямоугольные (тип 1), ригелей – тавровые с полкой внизу (тип
2) (см. рис.7.12.3).
Модуль упругости E=24·105 т/м2. Распределённый линейно вес
массы на ригель перекрытия примем равным – q=6 т/м.
155
Рис. 7.12.1. Расчётная схема
Рис. 7.12.2. Конструктивная схема
Тип 1
Тип 2
b=30 см, h=40 см
b=10 см, h=40 см,b1=30 см, h1=15 см
Рис.7.12.3. Поперечные сечения рамы
Текст исходных данных для расчёта выглядит так:
(0/1;ПРИМЕР-12/2;2/
/*
35;1:1/)
/*
(1/2 1 1 2/R 1 5/0 0 1 1/
/*
R 6 2/0 0 7 7/
/*
2 2 2 9/R 1 5/0 0 1 1/ /*
R 6 1/0 0 7 7/)
/*
(3/1 S0 24E5 30 40/
/*
2 S1 24E5 10 40 30 15/) /*
(4/0/R 1 6/0 0 3/
/*
R 7 2/6/)
/*
(5/1 1 3 5/R 1 2/7/)
/*
(6/19 4 0 1 1/R 1 11/1/)
/*
(7/1 6/)
/*
(15/20 3 0 1 3 1 3 0 1 2 8 1 6
Признак схемы - 2 [X, Z, Uy] */
Загружение 1 - сейсмическое
*/
КЭ №2 [плоский рамный стержень]*/
описание элементов с 7 по 18 */
описание элементов с 19 по 24 */
Описание элементов с 25 по 30 */
Сечение стоек рамы - [прамоуг.]*/
Ригели - [тавр с полкой внизу] */
Координаты 1...7 узел
*/
Координаты 8...21 узел
*/
Связи по X,Z,Uy в низу стоек
*/
Распределённая масса по ригелям*/
Величина распределённой массы */
3 2 6 1 0 0/) /* Сейсмика
*/
Система координат – декартова (по умолчанию). Признак
системы – 2. Рама смоделирована КЭ №2 "Плоский рамный
стержень".
В примере принят первый способ задания весов масс. Во второй
графе документа 6 указывается вид нагрузки – 4, являющийся кодом
автоматического распределения нагрузки в направлении осей X, Y, Z в
узлы данного элемента. Правила заполнения документов 6 и 7 см. в
п.2.12.7.
Для расчёта на сейсмическое воздействие задаётся документ 15
(см.пп.2.12, 2.12.1). Расшифровка по графам не даётся ввиду
подробного объяснения их содержания в п.2.12.1 и наличия примеров
их заполнения в п.2.12.6. Строка 35 документа 0 указывает, что
информация,
содержащаяся
в
строке
1
документа
15
распространяется на загружение 1. Т.е. загружение 1 является
сейсмическим.
156
В результате расчёта получены следующие результаты: на
рис.7.12.3 показаны 3 формы динамических колебаний рамы;
результаты автоматического распределения весов масс в узлы схемы
приведены в табл.7.12.1; собственные значения, частоты и периоды
колебаний рамы указаны в табл.7.12.2; инерционные силы,
прикладываемые в узлы схемы, в зависимости от формы колебания
приведены в табл.7.12.3. Также приведены таблицы перемещения
узлов и усилий в элементах.
Форма 1
Форма 3
Форма 2
31.05 Таблица 7.12.1
Распределение весов масс
-------------------------------------------------------------------------------|
2
3
4
5
6
7
9
10
11
|
-------------------------------------------------------------------------------| X
18.000 18.000 18.000 18.000 18.000 18.000 36.000 36.000 36.000 |
| Z
18.000 18.000 18.000 18.000 18.000 18.000 36.000 36.000 36.000 |
-------------------------------------------------------------------------------|
12
13
14
16
17
18
19
20
21
|
-------------------------------------------------------------------------------| X
36.000 36.000 36.000 18.000 18.000 18.000 18.000 18.000 18.000 |
| Z
36.000 36.000 36.000 18.000 18.000 18.000 18.000 18.000 18.000 |
-------------------------------------------------------------------------------31.06
31.07 Таблица 7.12.2
Рис.7.12.4. Формы динамических колебаний рамы
Собственные значения, частоты, периоды колебаний рамы
|-----------------------------------------------------------------------|
| N | COБCTB. |
Ч A C T O T Ы
| ПEPИOДЫ |
КОЭФФИЦИЕНТ
|
|П/П | ЗHAЧEHИЯ |-----------------------|----------|
ФОРМЫ
|
|
|
|
1/C
|
ГЦ
|
C
|
КОЛЕБАНИЯ
|
|-----------------------------------------------------------------------|
| 1 | 0.35861 |
2.7886 |
0.4440 | 2.25206 |
1.2899
|
| 2 | 0.11007 |
9.0848 |
1.4466 | 0.69127 |
0.4429
|
| 3 | 0.05777 |
17.3096 |
2.7563 | 0.36280 |
0.2828
|
|-----------------------------------------------------------------------|
31.08 Таблица 7.12.3
Инерционные силы на раму
157
-------------------------------------------------------------------------------|
2
3
4
5
6
7
9
10
11
|
-------------------------------------------------------------------------------|
1 - 1
|
| X
.84298 2.3414 3.8559 5.1468 6.0987 6.6866 1.6894 4.6834 7.7123 |
| Z
.01084 .01950 .02560 .02937 .03129 .03197
|
|
1 - 2
|
| X
1.9273 4.2393 4.4238 2.1143 -1.4705 -4.5648 3.8647 8.4841 8.8526 |
| Z
-.01035 -.02510 -.04220 -.05741 -.06731 -.07130
|
|
1 - 3
|
| X
3.6970 4.7790 -.39400 -4.9298 -2.4725 4.1361 7.4355 9.5916 -.78965 |
| Z
.00961 .01291 .02015 .03725 .05636 .06623
|
-------------------------------------------------------------------------------|
12
13
14
16
17
18
19
20
21
|
-------------------------------------------------------------------------------|
1 - 1
|
| X
10.293 12.198 13.372 .84298 2.3414 3.8559 5.1468 6.0987 6.6866 |
| Z
-.01084 -.01950 -.02560 -.02937 -.03129 -.03197 |
|
1 - 2
|
| X
4.2318 -2.9490 -9.1290 1.9273 4.2393 4.4238 2.1143 -1.4705 -4.5648 |
| Z
.01035 .02510 .04220 .05741 .06731 .07130 |
|
1 - 3
|
| X
-9.8965 -4.9470 8.2877 3.6970 4.7790 -.39400 -4.9298 -2.4725 4.1361 |
| Z
-.00961 -.01291 -.02015 -.03725 -.05636 -.06623 |
-------------------------------------------------------------------------------31.09
31.10
31.11 Таблица 7.12.4
(a) Перемещения узлов рамы
-------------------------------------------------------------------------------|
2
3
4
5
6
7
9
10
11
|
-------------------------------------------------------------------------------|
1 - 1
|
| X
-59.081 -164.10 -270.25 -360.72 -427.44 -468.64 -59.204 -164.12 -270.26 |
| Z
-0.9115 -1.6398 -2.1529 -2.4695 -2.6308 -2.6878
|
| UY
-27.673 -32.304 -29.567 -23.507 -15.777 -9.3895 -23.876 -28.441 -26.063 |
-------------------------------------------------------------------------------|
2
3
4
5
6
7
9
10
11
|
-------------------------------------------------------------------------------|
1 - 2
|
| X
-12.727 -27.994 -29.213 -13.963 9.7074 30.139 -12.760 -28.012 -29.230 |
| Z
0.0814 0.1977 0.3328 0.4529 0.5311 0.5625
|
| UY
-5.2852 -2.8101 2.2267 6.2604 6.9000 4.9626 -4.4787 -2.4430 1.9589 |
|
1 - 3
|
| X
-6.7246 -8.6924 0.7175 8.9686 4.4998 -7.5201 -6.7623 -8.7229 0.7190 |
| Z
-0.0205 -0.0273 -0.0427 -0.0797 -0.1212 -0.1426
|
| UY
-2.1052 1.3147 3.2799 0.7124 -2.9074 -3.3361 -1.7196 1.1213 2.8018 |
--------------------------------------------------------------------------------
Максимальные горизонтальные смещения имеют узлы №7, 14 и 21.
ΔX,max= 468.64 мм.
31.12 Таблица 7.12.5
(a) Усилия в элементах рамы
-------------------------------------------------------------------------------|
2_
1-1
1-2
2-1
2-2
3-1
3-2
4-1
4-2
5-1 |
|
1
1
2
2
3
3
4
4
5
|
|
2
2
3
3
4
4
5
5
6
|
-------------------------------------------------------------------------------|
1- 1
|
| N
-87.507 -87.507 -69.920 -69.920 -49.254 -49.254 -30.395 -30.395 -15.484 |
| M
-80.404 9.5606 -44.470 32.615 -30.650 37.657 -20.045 35.558 -10.046 |
| Q
29.988 29.988 25.695 25.695 22.769 22.769 18.534 18.534 13.294 |
-------------------------------------------------------------------------------31.13 продолжение табл. 7.12.5
-------------------------------------------------------------------------------|
1- 2
|
| N
7.8196 7.8196 11.167 11.167 12.966 12.966 11.527 11.527 7.5077 |
158
| M
-19.051 5.5211 -4.8299 11.166 5.5671 7.3273 11.611 -1.2854 10.880 |
| Q
8.1908 8.1908 5.3320 5.3320 0.5867 0.5867 -4.2991 -4.2991 -6.7080 |
|
1- 3
|
| N
-1.9735 -1.9735 -0.6544 -0.6544 -1.4801 -1.4801 -3.5507 -3.5507 -3.9811 |
| M
-11.825 6.4362 2.3755 6.3795 8.9617 -3.9307 2.5055 -9.0782 -7.6452 |
| Q
6.0873 6.0873 1.3346 1.3346 -4.2975 -4.2975 -3.8612 -3.8612 2.0078 |
-------------------------------------------------------------------------------|
2_
5-2
6-1
6-2
7-1
7-2
8-1
8-2
9-1
9-2 |
|
5
6
6
8
8
9
9
10
10
|
|
6
7
7
9
9
10
10
11
11
|
-------------------------------------------------------------------------------|
1- 1
|
| N
-15.484 -5.4687 -5.4687
|
| M
29.835 -0.6545 17.007 -90.440 29.315 -73.537 61.851 -59.379 65.467 |
| Q
13.294 5.8872 5.8872 39.918 39.918 45.129 45.129 41.615 41.615 |
|
1- 2
|
| N
7.5077 3.0180 3.0180
|
| M
-9.2433 4.2736 -9.2334 -21.201 9.7355 -9.8600 15.071 4.3771 6.8920 |
| Q
-6.7080 -4.5023 -4.5023 10.312 10.312 8.3105 8.3105 0.8383 0.8383 |
|
1- 3
|
| N
-3.9811 -2.0536 -2.0536 0
0
0
0
-0.0000 -0.0000 |
| M
-1.6216 -7.3445 6.2468 -12.909 8.5071 0.9147 6.3582 11.257 -6.9554 |
| Q
2.0078 4.5304 4.5304 7.1388 7.1388 1.8145 1.8145 -6.0709 -6.0709 |
--------------------------------------------------------------------------------
В таблице приведены усилия в элементах рамы для каждой из 3-х
заданных в исходных данных форм динамических колебаний.
Максимальный изгибающий момент в стойках MY имеем в элементе
№7 (начало), MY,max = 90.44 т*м (форма 1). Максимальная продольная
сила N в элементе №1, Nmax = 87.507 т (форма 1). Максимальная
перерезывающая сила Q в элементе №8, Qmax = 45.189 т (форма 1).
ЗАКЛЮЧЕНИЕ
Учебное пособие составлено в предположении о том, что читатель
уже знаком с методом конечных элементов (подробно и доступно
изложенном в [11, 12]).
В виду быстрого развития математического и программного
обеспечения современных компьютеров в соответствие с этим и
меняющийся
интерфейс
рассматриваемого
программного
обеспечения – в пособии не рассмотрены вопросы, связанные с
технологией выполнения расчётов на ПК «Мираж» и «ЛИРАWindows». С методикой работы за компьютером можно познакомиться
в соответствующих руководствах пользователя [1, 2].
Рассматриваемые программные комплексы имеют намного
бòльшие возможности, чем приведенные в пособии. Это и
армирование железобетонных элементов, подбор сечений из
стального проката, физическая, геометрическая и конструктивная
нелинейности при работе конструкций и др., с которыми читатель
может самостоятельно познакомиться и освоить их при изучении
описаний и руководств прилагаемых к программным продуктам
разработчиком.
Автор надеется, что данное учебное пособие поможет студентам
при изучении курса «Автоматизация проектирования строительных
конструкций» освоить практически современные методы расчёта
строительных конструкций зданий и сооружений.
159
Инженерам, осваивающим методу автоматизации расчётов
самостоятельно также будет полезно ознакомиться с пособием, в
котором систематизированы методы статических и динамических
расчётов и подробно разобраны примеры составления исходных
данных и чтения результатов расчёта.
Учебное пособие может использоваться в качестве справочного
пособия по ПК «Мираж» и «ЛИРА-Windows» при выполнении
статических и динамических расчётов.
160
СПИСОК ЛИТЕРАТУРЫ
1. Программный комплекс "Мираж". Руководство пользователя. – К.:
НИИАСС, 1994.
2. Программный
комплекс
"ЛИРА-Windows".
Руководство
пользователя. Т.7. – К.: НИИАСС, 1997.
3. Городецкий А.С., Евзеров И.Д. и др. Метод конечных элементов:
теория и численная реализация. Программный комплекс "ЛИРАWindows". – К.: ФАКТ, 1997. – 138 с.
4. СНиП II-7-81*. Строительство в сейсмических районах/ Госстрой
СССР. – М.: АПП ЦИТП, 1991. – 50 с.
5. СНиП 2.01.07-85*. Нагрузки и воздействия/ Минстрой России. – М.:
ГП ЦПП, 1996. – 44 с.
6. СНиП 2.02.01-83*. Основания зданий и сооружений/ Минстрой
России. – М.: ГП ЦПП, 1995. – 48 с.
7. Клепиков С.Н. Расчет конструкций на упругом основании. – К.:
Будівельник, 1967.
8. Пастернак П.Л. Основы нового метода расчета фундаментов на
упругом основании при помощи двух коэффициентов постели. – М.:
Госстройиздат, 1954.
9. Клепиков С.Н., Слободян Я.Е. Расчет зданий при многократной
подработке// Строительная механика и расчет сооружений. – 1990.
№2.
10. Тимошенко С.П., Войновский-Кригер С. Пластинки и оболочки. –
М.: Наука, 1966. – 636 с.
11. Зенкевич О. Метод конечных элементов в технике. – М.: МИР,
1975. – 542 с.
12. Секулович М. Метод конечных элементов/ Пер. с серб. – М.:
Стройиздат, 1993. – 664 с.
161