Раздел первый СТАТИКА
реклама

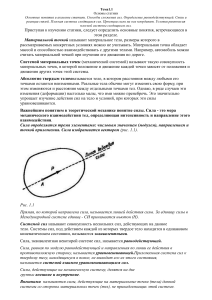
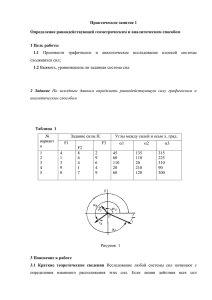
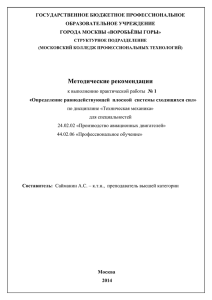
Лекция 2. ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ Геометрический метод сложения сил, приложенных в одной точке Силы называют сходящимися, если их линии действия пересекаются в одной точке. Различают плоскую систему сходящихся сил, когда линии действия всех данных сил лежат в одной плоскости, и пространственную систему сходящихся сил, когда линии действия сил лежат в разных плоскостях. На основании следствия из третьей аксиомы силу можно переносить по линии ее действия, поэтому сходящиеся силы всегда можно перенести в одну точку — в точку пересечения их линий действия. Выполнив перенос (рис. 8, а), получим четыре силы F 1 , F 2 , F 3 , F 4 , приложенные к точке К. Для определения их равнодействующей сложим последовательно все данные силы, используя правило треугольника (рис. 8, б). Находим частичные равнодействующие: Сложив все силы, найдем полную равнодействующую: Промежуточные векторы F 12 и F 123 можно не строить, а последовательно, в указанном выше порядке одну за другой отложить все заданные силы и начало первой соединить с концом последней. Фигура OABCD (см. рис. 8, б) называется силовым многоугольником. Замыкающая сторона этого многоугольника представляет собой равнодействующую F заданной системы сил, равную их геометрической сумме. Необходимо обратить внимание на то, что равнодействующая сила F всегда направлена от начала первого слагаемого к концу последнего слагаемого. Иными словами, стрелка равнодействующей силы всегда направлена навстречу обхода многоугольника, соответствующему последовательному сложению заданных сил (см. рис. 8, б). Если при построении силового многоугольника конец последней слагаемой силы совместится с началом первой, это означает, что равнодействующая F системы сходящихся сил окажется равной нулю. В этом случае система сходящихся сил находится в равновесии. Самозамыкание силового многоугольника данной системы сходящихся сил является геометрическим условием ее равновесия . Пример. На рис. 9, а показана система четырех сил F 1 , F 2 , F 3 и F 4 приложенных в точке А. Определить, уравновешена ли данная система сил? Решение. Построение силового многоугольника выполним в последовательности, соответствующей рис. 9, б. Сохраняя масштаб и направление, из произвольной точки отложим вектор первой силы F 1 . Из конца первого вектора силы отложим вектор второй силы F 2 . Аналогично отложим остальные векторы сил F 3 , F 4 . Конец вектора F 2 совпадает с началом вектора F 1 . Силовой многоугольник замкнут, равнодействующая равна нулю ( F = 0); следовательно, система сил уравновешена. Упражнение 1. 1. Укажите, какой вектор силового многоугольника (рис. 10) является равнодействующей силой. А. ОА, Б. АВ, В. ВС, Г. CD, Д. OD. 2. На каком рисунке – 10 или 11 – представлен многоугольник сил, соответствующий уравновешенной системе сходящихся сил? Проекция силы на ось Решение задач на равновесие сходящихся сил с помощью построения замкнутых силовых многоугольников в большинстве случаев сопряжено с громоздкими построениями. Более общим и универсальным методом решения таких задач является переход к определению проекций заданных сил на координатные оси и оперирование с этими проекциями. Осью называют прямую линию, которой приписано определенное направление. Проекция вектора на ось является скалярной величиной, которая определяется отрезком оси, отсекаемым перпендикулярами, опущенными на нее из начала и конца вектора. Проекция вектора считается положительной (+), если направление от начала проекции к ее концу совпадает с положительным направлением оси. Проекция вектора считается отрицательной (—), если направление от начала проекции к ее концу противоположно положительному направлению оси. Рассмотрим ряд случаев проецирования сил на ось: 1. Вектор силы F (рис. 12, а) составляет с положительным направлением оси х острый угол найти проекцию, из начала конца вектора силы опускаем перпендикуляры на ось х; получаем (4) Fx F cos . . Чтобы Проекция вектора в данном случае положительна. 2. Сила F (рис. 12, б) составляет с положительным направлением оси x тупой угол . Тогда Fx F cos , но так как 180 Проекция вектора в данном случае отрицательна. 3. Сила F (рис. 12, в) перпендикулярна оси х. Проекция силы F на ось х равна нулю Fx F cos 90 0 Итак, проекция силы на ось координат равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Силу, расположенную на плоскости хОу (рис. 13), можно спроектировать на две координатные оси Ох и Оу. На рисунке изображена сила F и ее проекции Fx и Fy, Ввиду того что проекции образуют между собой прямой угол, из прямоугольного треугольника АСВ следует: Этими формулами можно пользоваться для определения модуля и направления силы, когда известны ее проекции на координатные оси. Проекция векторной суммы на ось Рассмотрим сходящиеся силы равнодействующая, этих сил F 1 , F 2 , F 3 , F 4 , (рис. 14, а). Геометрическая сумма, или F определяется замыкающей стороной силового многоугольника (рис. 14, б) : Опустим из вершин силового многоугольника на ось х перпендикуляры. Рассматривая полученные проекции сил непосредственно из выполненного построения, имеем где n — число слагаемых векторов. Их проекции входят в уравнение (7а) с соответствующим знаком. Итак, проекция векторной суммы или равнодействующей на какую-либо ось равна алгебраической сумме проекций слагаемых векторов на ту же ось. В плоскости геометрическую сумму сил можно спроецировать на две координатные оси, а в пространстве — соответственно на три. Упражнение 2 1. Определить модуль и направление силы, если известны ее проекции Fx = 30 Н; Fy = 40 Н. 2. При каком значении угла между силой и осью проекция силы равны нулю? А. = 0. = 90°. В. = 180°. Б. 3. Определить проекцию равнодействующей силы на ось у, если известны проекции каждого из слагаемых векторов: F1y,= 40 Н; F2y = 60 Н; F3y = - 100 Н; F4y = - 120 Н. Аналитическое определение значения и направления равнодействующей плоской системы сходящихся сил (метод проекций) В системе сходящихся сил равнодействующая может быть найдена через проекции составляющих сил. Если есть такая система из нескольких сил, то путем параллельного переноса сил можно найти ее равнодействующую. Проецируя все силы на оси Ох и Оу, получим, что проекция равнодействующей силы равна алгебраической сумме (то есть с учетом знака) проекций всех сил системы на ту же ось. По теореме Пифагора по проекциям можно найти величину силы, а по отношению катетов – тангенс угла между равнодействующей и осями. Рассмотрим ее определение на примере системы сил F 1 , F 2 , F 3 , изображенной на рис.15,а. Равнодействующая этих сходящихся сил построена на рис.15,б: F F1 F 2 F 3 Проектируя все силы на оси Ох и Оу и используя теорему о проекции векторной суммы, получаем: n 3 F x F1x F2 x F3 x Fix i 1 n 3 F y F1 y F2 y F3 y Fiy i 1 Численное значение равнодействующей силы F через ее проекции определяется по формуле: F F2x F2 y Подставив в уравнение значение проекций 2 n 3 n 3 F Fix Fix i 1 i 1 F x и F y найдем: 2 Направление F определим по косинусам углов, которые эта сила образует с координатными осями: Упражнение 3 1. Определить модуль равнодействующей системы сходящихся сил, если проекции слагаемых векторов равны: Flx = 50 Н; F2x = —30 Н; F3x = 60 Н; F4x = 70 Н; F1y = - 70 Н; F2y = 40 Н; F3y = 80 Н; F4y = -90 Н. 2. В каком из указанных случаев плоская система сходящихся сил уравновешена? Уравнения равновесия плоской системы сходящихся сил Сходящаяся система сил находится в равновесии в случае замкнутости силового многоугольника. Равнодействующая при этом равна нулю ( F 0 ). Проекции равнодействующей системы сходящихся сил на координатные оси равны суммам проекций составляющих сил на те же оси (см. § 9): n F x Fix i 1 (11) n F y Fiy i 1 Значение равнодействующей определится по формуле (9). Оба слагаемых, стоящих под знаком корня, во всех случаях положительны как величины, возведенные в квадрат. Поэтому F 0 только при выполнении условий: 0; i 1 (12) n Fiy 0. i 1 n F ix Рассматриваемая система сходящихся сил находится в равновесии, когда алгебраические суммы проекций ее слагаемых на каждую из двух координатных осей равны нулю. Зависимости (12) называют уравнениями равновесия плоской системы сходящихся сил и используют при аналитическом решении задач. Решение задач на равновесие плоской системы сходящихся сил Непосредственное применение условий равновесия в геометрической форме дает наиболее простое решение для системы трех сходящихся сил. При наличии в системе четырех и более сил рациональнее применять аналитический метод, который является универсальным и применяется чаще, всего. При аналитическом методе решение этих задач выполняется на основе уравнений равновесия по следующему плану: первый этап - выделяют объект равновесия - тело или точку, где пересекаются линии действия всех сил, т.е. точку, равновесие которой в данной задаче следует рассмотреть; второй этап - к выделенному объекту равновесия прикладывают заданные силы; третий этап - выделенную точку или тело освобождают от связей, их действие заменяют реакциями; четвертый этап - выбирают координатные оси и составляют уравнения равновесия; пятый этап - решают уравнения равновесия; шестой этап - проверяют правильность решения. Остановимся еще на одном важном вопросе. В задачах статики часто приходится определять усилия в стержнях. Необходимо установить, как действуют растягивающие и сжимающие силы в стержнях на точки крепления стержней или узлы. Когда стержень MN растянут (рис. 16, а), его реакции на точки крепления направлены от этих точек М и N внутрь стержня. Когда стержень сжат, его реакции направлены к точкам закрепления, т. е. наружу (рис. 16, б). Следовательно, можно сказать, что в растянутом стержне реакции направлены от узлов внутрь стержня, в сжатом — к узлам наружу от стержня, по аналогии с деформированной пружиной. Часто при решении задач трудно заранее определить направление усилий в стержнях. В этих случаях удобно считать стержни растянутыми и их реакции направлять от узлов. Если решение задачи даст значение реакции со знаком минус, то в действительности имеет место не растяжение, а сжатие. Таким образом, реакции растянутых стержней будут положительными, а сжатых – отрицательными. Понятие о силе трения При движении друг относительно друга двух соприкасающихся тел по поверхности их соприкосновения возникает касательная реакция, препятствующая движению. Она называется силой внешнего трения Rf и направлена в сторону, противоположную движению. Трение в машинах играет существенную роль. В некоторых механизмах передача движения от ведущего звена к ведомому осуществляется трением. В других случаях трение препятствует движению, поглощая значительную часть работы движущих сил. В зависимости от вида относительного движения соприкасающихся тел различают трение скольжения и трение качения. Основную зависимость для силы трения скольжения можно выразить формулой: Rf = f . F, где f — коэффициент пропорциональности, или коэффициент трения скольжения, зависящий от рода трущихся тел и физического состояния контактирующих поверхностей, его значение можно найти в справочниках; F — сила нормального давления, прижимающая трущиеся поверхности друг к другу. Таким образом, сила трения прямо пропорциональна нормальному давлению и направлена в сторону, противоположную направлению движения тела.